
坂道検出装置、坂道検出方法、及び現在位置表示装置
【課題】移動体の走行路が坂道であるか否かを迅速且つ正確に検出することのできる坂道検出装置及び検出方法を提供する。
【解決手段】移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段12と、角速度又は加速度を検出する角速度/加速度検出手段13、14と、前記気圧検出手段12により検出した前記気圧と、前記角速度/加速度検出手段13、14により検出した前記角速度又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段19と、を備える。
【解決手段】移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段12と、角速度又は加速度を検出する角速度/加速度検出手段13、14と、前記気圧検出手段12により検出した前記気圧と、前記角速度/加速度検出手段13、14により検出した前記角速度又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段19と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、坂道検出装置、坂道検出方法、及び現在位置表示装置に関し、特に、気圧検出と自律航法を併用して、移動体の走行路が坂道であるか否かを検出する坂道検出装置、坂道検出方法、及び現在位置表示装置に関する。
【背景技術】
【0002】
移動体の現在位置を検出し、ディスプレイに表示されている地図画像上に現在位置を示す現在位置マークを重ねて表示するナビゲーション装置において、現在位置を検出する方法として、GPS衛星からの電波を利用したGPS方式(衛星航法方式)と、移動体又はナビゲーション装置に搭載された移動距離算出手段及びジャイロスコープ等の慣性センサを利用して現在位置を推測する自律航法方式とがある。一般的なナビゲーション装置は、これら2つの航法方式が併用される。
【0003】
しかしながら、これらの方式で求めた移動体の現在位置には、誤差が含まれるため、表示されている地図画像の道路と現在位置とが正確に一致せず、検出し又は推測した現在位置をそのままディスプレイに表示すると、実際は道路上にいても、道路から外れた位置に現在位置マークが表示されてしまう場合がある。
【0004】
このような不具合を解消するため、検出した現在位置と、地図データベースに保持されている地図情報の道路とを比較し、各種のマッチング方法を用いて正しい道路上に現在位置をマッチングさせ、表示手段に表示されている地図画像の道路上に現在位置マークを修正して表示するようにしたマップマッチング技術が利用されている。
【0005】
ところで、例えば、高速道路のように、本線と、本線と一般道との連結路である分岐路や進入路(ランプ)と、が接近していたり、分岐路や進入路が本線又は一般道路に対してわずかな分岐角度で設けられている場合、従来のマップマッチング技術だけでは、高速道路の本線を走行しているのか、それとも分岐路や進入路を走行しているのかを確実に判断することが困難であり、地図上の不適切な位置(実際は高速道路本線を走行中に分岐路(一般道路)に現在位置をマッチング)に現在位置マークを表示してしまうことがある。
【0006】
そこで、例えば、分岐路や進入路が上下方向に傾斜した坂道となっていることに注目し、移動体の走行路(移動体が走行している道路)が坂道であるか否かを検出し、その検出結果をマップマッチングに利用することが考えられる。
【0007】
例えば、下記特許文献1(特開2010−39954号公報)は、「坂道検出方法及び坂道検出装置」についての発明を開示している。この方法及び装置では、気圧センサの出力に基づいて高度を算出し、単位走行距離に対する高度差から走行路の勾配を求め、この勾配が所定閾値以下であれば坂道でないと判定する一方、所定時間ごとに求めた勾配が、所定回数以上連続して所定範囲内であれば、その走行路を坂道であると判定している。
【0008】
ところで、気圧センサを用いた場合、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動により、坂道であると誤検出する恐れがあるが、特許文献1では、求めた勾配が所定回数以上連続して所定範囲内のときに坂道であると判定しているため、誤検出を回避することができる。すなわち、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動は一時的な変動であるため、所定回数以上連続して所定範囲内のときにのみ坂道であると判定とすることで、誤検出を回避することができる。
【0009】
また、走行路が坂道であるか否かを検出する手段として、自律航法で使用されるジャイロスコープや加速度センサを利用することもできる。ジャイロスコープは、移動体の移動方向(上下左右等)の変化を角速度として検出することができるため、この角速度に基づいて走行路が坂道であるか否かを検出することができる。また、加速度センサの場合、重力加速度の検出が走行路の傾斜角度に応じて変化することから、この加速度に基づいて走行路が坂道であるか否かを検出することができる。詳細には、平坦な道路で停車している場合では、道路に対して垂直方向(上下方向)にのみ加速度(重力加速度)が出力されるが、坂道(上り坂、下り坂)で停車している場合では、道路に対して垂直方向(上下方向)のみならず、移動体の進行方向(前後方向)に加速度が出力される。すなわち、坂道で停車している場合では、垂直方向(上下方向)と進行方向(前後方向)とに重力加速度が分散されて出力される。そして、出力された垂直方向の加速度と進行方向の加速度に基づき、走行路が坂道であるか否かを検出することができる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2010−39954号公報(段落[0016]〜[0022])
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上記特許文献1の場合、誤検出を回避するために、気圧センサの出力に基づく高度差を複数回算出して坂道であるか否かを判定しており、検出に時間が掛るため、迅速にマッチング処理を行うことが出来ない。この場合、マッチング処理の遅れにより、現在位置に応じた報知などが遅れてしまうことが考えられる。すなわち、ナビゲーション装置であれば、マッチング処理後の現在位置に応じて、経路案内のための報知内容が異なる(右左折案内など)ため、マッチング処理の遅れにより、報知が遅れ、本来、左折すべき交差点を直進してしまうなどの事態が生じうる。
【0012】
また、例えば、経路が探索されている状態において、マッチング処理後の現在位置が探索された経路から逸脱しているような場合では、経路の再探索が行なわれるなど、マッチング処理後の現在位置に応じて処理が異なるため、迅速且つ正確にマッチング処理が行なわれることが望まれる。
【0013】
また、ジャイロスコープは、気圧センサのように、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動の影響を受けることがないため、走行路が坂道であるか否かを迅速に検出することが可能である。しかしながら、渋滞等で移動体の移動速度が遅いときや停車中では、角速度が小さく、又は、角速度を検出できないため、走行路が坂道であるか否かを正確に検出できない場合がある。
【0014】
一方、加速度センサは、移動体が停止している場合であれば、重力方向を検出して車両の傾き(道路の傾斜)を算出可能であるため、走行路が坂道であるか否かを検出することができる。しかしながら、移動体が高速で走行している場合には、移動方向の加速度の影響で、路面に垂直な方向の加速度の誤差が増大するため、走行路が坂道であるか否かを正しく検出することが困難となる。
【0015】
本発明は、上記の問題点を解消することを課題とするものであり、移動体の走行路が坂道であるか否かを迅速且つ正確に検出することのできる坂道検出装置及び坂道検出方法を提供することを目的とするものである。
【0016】
また、本発明は、移動体の実際の現在位置を迅速且つ正確にマップマッチングし、現在位置を示すマークをディスプレイに表示することのできる現在位置表示装置を提供することを目的とするものである。
【課題を解決するための手段】
【0017】
前記課題を解決するために、本願の請求項1にかかる発明は、移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段と、を備えることを特徴とする。
【0018】
本願の請求項2にかかる発明は、請求項1記載の坂道検出装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする。
【0019】
本願の請求項3にかかる発明は、請求項1又は2記載の坂道検出装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする。
【0020】
本願の請求項4にかかる発明は、請求項2又は3に記載の坂道検出装置において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする。
【0021】
本願の請求項5にかかる発明は、移動体の走行路が坂道であるか否かを検出する坂道検出方法において、気圧を検出するステップと、角速度及び/又は加速度を検出するステップと、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定するステップと、を含むことを特徴とする。
【0022】
本願の請求項6にかかる発明は、請求項5に記載の坂道検出方法において、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が前記第2閾値よりも小さいとき、前記移動体の走行路を平道と判定するステップを含むことを特徴とする。
【0023】
本願の請求項7にかかる発明は、請求項5又は6に記載の坂道検出方法において、前記気圧の変化量に応じて前記第2閾値を変更するステップを含むことを特徴とする。
【0024】
本願の請求項8にかかる発明は、移動体の現在位置を検出する現在位置検出手段と、地図情報を保持する地図データベースと、前記現在位置検出手段により検出された前記現在位置及び前記地図情報に基づきマッチング処理するマップマッチング手段と、前記マッチング処理に基づく現在位置を示すマークを表示する表示手段とを備える現在位置表示装置において、前記現在位置表示装置は、さらに気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の走行路が坂道であるか否かを判定する坂道判定手段と、を備え、前記マップマッチング手段は、前記坂道判定手段による判定結果に基づいてマッチング処理することを特徴とする。
【0025】
本願の請求項9にかかる発明は、請求項8に記載の現在位置表示装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする。
【0026】
本願の請求項10にかかる発明は、請求項8又は9に記載の現在位置表示装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする。
【0027】
本願の請求項11にかかる発明は、請求項9又は10に記載の現在位置表示装置において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする。
【発明の効果】
【0028】
請求項1にかかる発明においては、移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段(例えば、ジャイロスコープ、加速度センサ)と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段と、を備える。
【0029】
このように構成することにより、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動を坂道であると誤判定することがなく、坂道を迅速且つ正確に検出することができる。
【0030】
請求項2にかかる発明においては、請求項1にかかる発明において、坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することができる。
【0031】
請求項3にかかる発明においては、請求項1又は2にかかる発明において、坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することができる。
【0032】
請求項4にかかる発明においては、請求項2又は3にかかる発明において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更する。例えば、気圧の変化量が大きいときには、坂道である可能性があり、角速度又は加速度も大きくなる可能性があるため、第2閾値を大きい値に設定し、ノイズの影響を受けない状態で坂道であるか否かを判定することができる。また、気圧の変化量が小さいときには、緩い坂道である可能性があり、角速度又は加速度も小さくなる可能性があるため、第2閾値を小さい値に設定することで、検出値の小さい角速度又は加速度を検出し、坂道であるか否かを判定することができる。
【0033】
請求項5にかかる発明においては、移動体の走行路が坂道であるか否かを検出する坂道検出方法において、気圧を検出するステップと、角速度及び/又は加速度を検出するステップと、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定するステップと、を含む。
【0034】
このような判定処理を行うことにより、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動を坂道であると誤判定することがなく、坂道を迅速且つ正確に検出することができる。
【0035】
請求項6にかかる発明においては、請求項5に記載の発明において、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が前記第2閾値よりも小さいとき、前記移動体の走行路を平道と判定するステップを含む。このように処理することにより、坂道と平道とを判別することができる。
【0036】
請求項7にかかる発明においては、請求項5又は6に記載の発明において、前記気圧の変化量に応じて前記第2閾値を変更するステップを含む。このように処理することにより、ノイズの影響を受けることなく、坂道であるか否かを正確に検出することができる。
【0037】
請求項8にかかる発明においては、移動体の現在位置を検出する現在位置検出手段と、地図情報を保持する地図データベースと、前記現在位置検出手段により検出された前記現在位置及び前記地図情報に基づきマッチング処理するマップマッチング手段と、前記マッチング処理に基づく現在位置を示すマークを表示する表示手段とを備える現在位置表示装置において、前記現在位置表示装置は、さらに気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の走行路が坂道であるか否かを判定する坂道判定手段と、を備え、前記マップマッチング手段は、前記坂道判定手段による判定結果に基づいてマッチング処理する。
【0038】
このように構成することにより、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動を坂道であると誤判定することがなく、坂道であるか否かを迅速且つ正確に判定し、その判定結果に基づき、正しいマッチング処理を行い、現在位置を示すマークを表示手段に表示させることができる。
【0039】
請求項9にかかる発明においては、請求項8に記載の発明において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することができる。
【0040】
請求項10にかかる発明においては、請求項8又は9に記載の発明において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することができる。
【0041】
請求項11にかかる発明においては、請求項9又は10に記載の発明において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更する。このように処理することにより、ノイズの影響を受けることなく、坂道であるか否かを正確に検出することができる。
【図面の簡単な説明】
【0042】
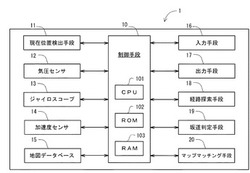
【図1】本発明の坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置のブロック図である。
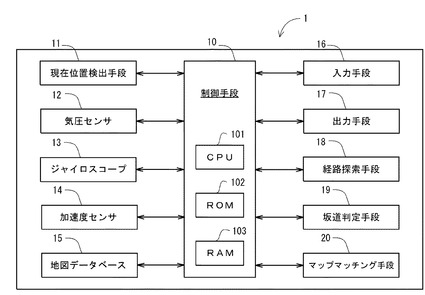
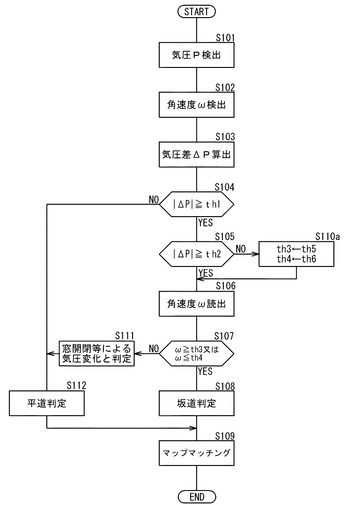
【図2】図1に示すナビゲーション装置における実施例1の処理フローチャートである。
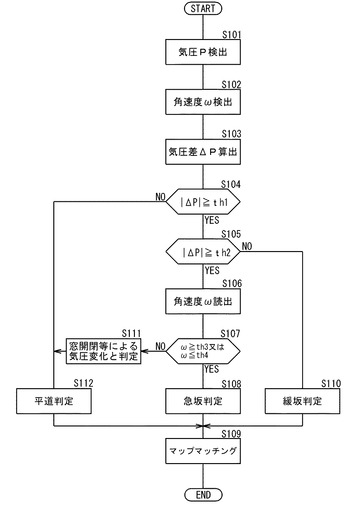
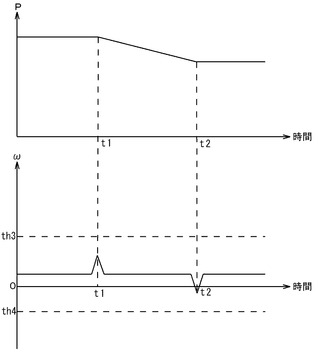
【図3】図2の処理フローチャートにおいて、移動体が急坂を走行しているときに検出される気圧及び角速度の説明図である。
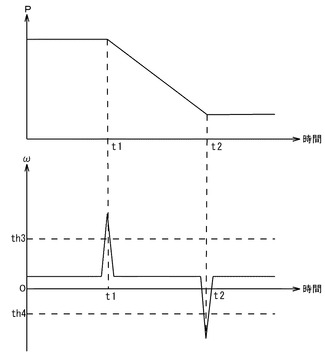
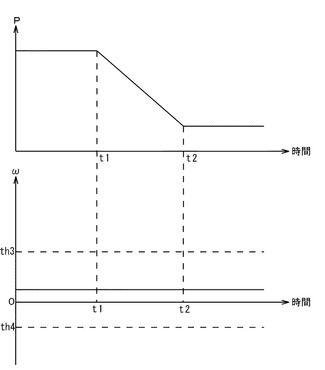
【図4】図2の処理フローチャートにおいて、移動体が緩坂を走行しているときに検出される気圧及び角速度の説明図である。
【図5】図2の処理フローチャートにおいて、移動体が平道を走行しているときに検出される気圧及び角速度の説明図である。
【図6】図1に示すナビゲーション装置における実施例2の処理フローチャートである。
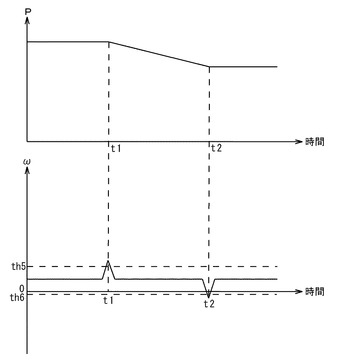
【図7】図6の処理フローチャートにおいて、移動体が緩坂を走行しているときに検出される気圧及び角速度の説明図である。
【発明を実施するための形態】
【0043】
以下、本発明の具体例を実施例及び図面、図1〜図7を参照して詳細に説明する。ただし、以下に示す実施例は、本発明の技術思想を具体化するための坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置を例示して説明するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の坂道検出装置、坂道検出方法、及び現在位置表示装置にも等しく適用し得るものである。
【実施例1】
【0044】
図1は、本発明の実施例1にかかる坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置1のブロック図を示す。
【0045】
ナビゲーション装置1は、自動車等の移動体に搭載され、移動体の現在位置を地図画像とともにディスプレイ(出力手段17)に表示して、移動体に乗車しているユーザが目的地まで移動するための支援を行うものである。ナビゲーション装置1は、制御手段10、現在位置検出手段11、気圧センサ12、ジャイロスコープ13、加速度センサ14、地図データベース15、入力手段16、出力手段17、経路探索手段18、坂道判定手段19及びマップマッチング手段20を備えて構成される。なお、各部はバスなどで接続されており、例えば、制御手段10は、気圧センサ12が検出、出力した気圧を取得することが可能である。
【0046】
制御手段10は、CPU101、RAM103、ROM102を備えて構成されており、RAM103及び/又はROM102に記憶された制御プログラムをCPU101が実行することにより、下記に説明する各部の動作を制御・統括する。
【0047】
現在位置検出手段11は、地球上空を周回している複数のGPS衛星からの信号を所定の時間間隔で受信し、この信号に含まれている時刻情報及び衛星位置情報に基づいて移動体の現在位置を算出する。
【0048】
気圧センサ12(気圧検出手段)は、移動体の現在位置における気圧を検出する気圧検出手段である。検出した気圧は、後述する坂道判定のため、制御手段10のRAM103に一時記憶される。
【0049】
ジャイロスコープ13(角速度検出手段)は、少なくとも移動体の走行中における上下方向(ピッチ角)に対する方向変化を角速度として検出する角速度検出手段である。検出した角速度は、後述する坂道判定のため、制御手段10のRAM103に一時記憶される。
【0050】
加速度センサ14(加速度検出手段)は、少なくとも垂直な方向(上下方向)と、進行方向(前後方向)の加速度を検出する加速度検出手段である。検出した加速度は、後述する坂道判定のため、制御手段10のRAM103に一時記憶される。なお、加速度センサ14は、一般的にはナビゲーション装置1の上下、左右、前後の3軸方向の加速度を検出する3軸加速度センサで構成される。加速度センサ14は、平坦な道路で停止中であれば、垂直な方向(上下方向)の加速度(重力加速度)のみを出力するので、加速度センサの出力が垂直な方向(上下方向)のみであれば、平坦な道路で停車していることがわかり、また、停車中に、垂直な方向(上下方向)に加えて、前後方向の加速度も検出される場合、坂道で停車していることが分かる。
【0051】
なお、ジャイロスコープ13及び加速度センサ14は、移動体の現在位置を移動体自身で検出するための自律航法センサを構成するものでもあり、現在位置検出手段11がGPS衛星から受信した信号に基づいて算出した現在位置を補完するためにも利用可能である。また、自律航法センサを備えることで、GPS衛星信号を受信できないトンネルや地下街、地下駐車場、建物内の駐車場、又は、高層ビル街等、GPS衛星信号の反射によるマルチパスの影響を受ける場所でも、ジャイロスコープ13や加速度センサ14からの出力によりナビゲーション装置1の現在位置を算出することができる。すなわち、ジャイロスコープ13や加速度センサ14などで構成される自律航法センサも現在位置検出手段11へ含めてもよい。
【0052】
地図データベース15は、道路データ、建物データ、背景データ、テキストデータから構成される地図情報を保持する。
【0053】
道路データは、道路をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータとから構成される。
【0054】
ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、交差点情報や交差点名称を示す情報等のノード属性、坂道(緩急を含んでもよい)を表す坂道属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0055】
また、リンクデータは、リンクの始点及び終点となるノード番号、高速道路や一般道や街路等を区別するための道路種別、それぞれの道路の本線や連結路、分岐路を区別するための道路種別、さらに道路の傾斜方向、傾斜角度、坂道(緩急を含んでもよい)を表す坂道属性、距離及び/又は所要時間、国道○号線のような道路名称、進行方向のデータを含んで構成される。リンクデータは上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0056】
建物データは、建物の位置座標(緯度・経度)、駅、ビル、民家等の建物の種別、表示色のデータを含んで構成される。また背景データは、海岸線、湖沼、河川形状、山林等の背景画像データとなる少なくとも3点からなる位置座標(緯度・経度)、表示色のデータを含んで構成される。テキストデータは、それぞれの地名や河川名等の文字(名称)、及びその座標(緯度・経度)のデータを含んで構成される。
【0057】
なお、ナビゲーション装置1は、地図データベース15をナビゲーショ装置1に内蔵したスタンドアロン型のものとしているが、本発明はこれに限定されることはない。例えば、ナビゲーション装置1に通信手段(図示せず)を設け、ナビゲーション装置1の外部の情報提供サーバ(図示せず)に接続して通信を行い、情報提供サーバに備えられた地図データベースから案内経路に関連付けられた地図情報を取得するようにしてもよい。
【0058】
その場合、ナビゲーション装置1は出発地又は現在位置と目的地とを指定し、これを経路探索条件として情報提供サーバに送信し、経路探索を依頼する。情報提供サーバは、経路探索手段を備え、ナビゲーション装置1から受信した出発地又は現在位置と目的地とを経路探索条件として経路探索を行い、探索結果を含む地図情報をナビゲーション装置1へ送信する。
【0059】
入力手段16は、経路探索を行うために、ユーザが出発地、目的地等の経路探索条件をナビゲーション装置1に入力するためのキーやタッチパネルから構成される。
【0060】
出力手段17は、現在位置マーク、地図画像、案内経路等を表示する液晶表示パネル(ディスプレイ)と、ユーザに対して音声で必要な情報を提供するスピーカとから構成される。
【0061】
経路探索手段18は、入力手段16を用いてユーザが入力した経路探索条件に従い、地図データベース15に記憶されている地図情報を参照して最適な経路(案内経路)を探索するものである。経路探索手段18は、出発地又は現在位置に対応する道路のノードから目的地に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路として探索する。
【0062】
なお、経路探索手段18は、外部の情報提供サーバから通信手段を介して地図情報を取得し、経路探索を行うものであってもよい。また、地図データベースとともに経路探索手段を外部の情報提供サーバに設置し、ナビゲーション装置1が外部から案内経路を取得するように構成することもできる。
【0063】
坂道判定手段19は、気圧センサ12により検出された気圧の変化量と、ジャイロスコープ13により検出された角速度とに基づき、移動体の走行路が坂道であるか否かを判定するものである。坂道判定手段19は、走行路が坂道である場合、その坂道が急坂なのか緩坂なのかを判定することもできる。さらに、坂道判定手段19は、気圧の変化量と、加速度センサ14により検出された加速度とに基づき、移動体の走行路が坂道であるか否かを判定するようにしてもよい。さらにまた、気圧の変化量、角速度及び加速度に基づいて坂道であるか否かを判定してもよい。
【0064】
マップマッチング手段20は、現在位置検出手段11によって算出された現在位置を仮の現在位置とし、坂道判定手段19により判定された坂道であるか否かの判定結果に従い、その仮の現在位置の近隣にあるマップマッチングの候補となるリンク、例えば、高速道路の本線に対応するリンク、本線からわずかな傾斜角度で分岐している分岐路や進入路等に対応したリンクを特定する。
【0065】
次に、以上のように構成されるナビゲーション装置1を用いた経路案内処理について説明する。
【0066】
ユーザが、入力手段16を用いて、出発地、目的地、経由地等の経路探索条件を入力すると、経路探索手段18は、地図データベース15に記憶されている地図情報を参照して、出発地又は現在位置から目的地までの案内経路を探索する。案内経路は、出発地又は現在位置に対応する道路のノードから目的地に対応する道路のノードに至るまでのリンク・ノードをダイクストラ法等の手法によって探索し、時間、距離、費用等のリンクコストのうち、ユーザが所望するリンクコストの累積値が最小となる経路を案内経路として探索することができる。探索された案内経路は、地図データベース15から読み出した地図情報に基づく地図画像とともに、ナビゲーション装置1の液晶表示パネル等の出力手段17に表示される。
【0067】
一方、ナビゲーション装置1の現在位置検出手段11は、GPS衛星から時刻情報及び衛星位置情報を含む信号を受信し、これらの情報に基づいて移動体の現在位置を算出する。そして、算出された現在位置に基づいた現在位置マークが地図画像及び案内経路とともに出力手段17に表示される。ユーザは、出力手段17に表示された地図画像、現在位置マーク及び案内経路に従い、所望の目的地まで移動することができる。
【0068】
ところで、現在位置検出手段11が算出した現在位置には、誤差が含まれているため、算出された現在位置にそのまま現在位置マークを表示すると、地図画像上の適切な位置に表示されない場合がある。そのため、マッチング処理により適切な現在位置を特定し、現在位置マークを表示する位置(現在位置)を修正する必要がある。
【0069】
そこで、図2に示す処理フローチャートに従い、移動体の走行路が坂道であるか否かを判定し、その判定結果を用いて適切なマッチング処理を行う方法について説明する。
【0070】
まず、ナビゲーション装置1の気圧センサ12は、気圧Pを所定時間毎に検出する(ステップS101)。検出した気圧Pは、制御手段10のRAM103に一時記憶される。
【0071】
また、ナビゲーション装置1のジャイロスコープ13は、上下方向に対する方向変化を示す角速度ωを所定時間毎に検出する(ステップS102)。検出した角速度ωは、気圧Pと同様に、制御手段10のRAM103に一時記憶される。
【0072】
次に、坂道判定手段19は、前回検出された気圧P(RAM103に記憶されている)と、今回検出された気圧Pとの差である気圧差ΔPを算出する(ステップS103)。なお、気圧差ΔPは、前回検出された気圧Pと今回検出された気圧Pとの差に限られるものではなく、複数回前に検出された気圧Pと今回検出された気圧P、又は、複数回前に検出された連続した複数の気圧Pの平均値と、今回検出された気圧Pを含む連続した複数の気圧Pの平均値の差として求めたものであってもよい。
【0073】
次いで、坂道判定手段19は、気圧差ΔPの絶対値である変化量|ΔP|を所定の閾値th1(>0)と比較する。|ΔP|≧th1であるとき(ステップS104、YES)、さらに、変化量|ΔP|を閾値th1よりも大きい閾値th2(>th1)(第1閾値)と比較する。|ΔP|≧th2であるとき(ステップS105、YES)、走行路の高度が大きく変化していることが想定される。例えば、図3に示すように、時刻t1、t2間で気圧Pが大きく低下している場合、走行路が急な上り坂であることが想定される。急な下り坂の場合も同様に、気圧Pが大きく上昇し、変化量|ΔP|が大きくなる。
【0074】
ステップS105において、坂道判定手段19が|ΔP|≧th2と判定した場合、坂道判定手段19は、この変化量|ΔP|が発生した期間の前後の時刻t1、t2近傍で検出した角速度ωをRAM103から読み出す(ステップS106)。すなわち、ジャイロスコープ13は上下方向に対する方向変化を示す角速度ωを検出するものであるため、坂道の始まりと、坂道の終わりに角速度ω(坂道による角速度ω)が検出される。また、角速度ωは、上下方向の方向変化があると検出されるが、閾値th2以上の変化量|ΔP|は、方向変化後、所定距離走行しなければ検出されないことが考えられる。そのため、変化量|ΔP|が発生した期間の前後の時刻t1、t2近傍で検出した角速度ωをRAM103から読み出している。
【0075】
次に、坂道判定手段19は、角速度ωを所定の閾値th3(>0)(第2閾値)、th4(<0)(第2閾値)と比較する。ω≧th3又はω≦th4であるとき(ステップS107、YES)、時刻t1、t2近傍で走行路の傾斜が大きく変化していることが想定される。従って、ステップS105の判定結果(YES)と、ステップS107の判定結果(YES)とに基づき、走行路が「急坂」であると判定する(ステップS108)。
【0076】
なお、角速度ωは、上下方向によって数値が逆転(プラスマイナス)するため、閾値th3及び閾値th4を設ける。なお、本実施例では、閾値th3が上りの際の閾値であり、閾値th4が下りの際の閾値である。また、|th3|=|th4|としてもよい。さらに、角速度ωがプラスであれば閾値th3と比較し、角速度ωがマイナスであれば|ω|と|th4|とを比較しても良い。そして。角速度|ω|がth3又は|th4|(第2閾値)以上であれば「急坂」と判定してもよい。なお、この比較方法は他の比較においても同様である。
【0077】
すなわち、気圧差ΔPの絶対値である変化量|ΔP|が所定の閾値th2(th2>th1)以上であり、且つ、角速度ωが所定の閾値th3(>0)以上、又は、所定の閾値th4(<0)以下の場合には、走行路の高度変化以外の原因で気圧Pが変動したのではないため、その走行路を確実に「急坂」であると判定することができる。
【0078】
なお、時刻t1、t2で例示したが、時刻t1において変化量|ΔP|が検出された時点で、本フローチャートを行なうことで、早急に、走行路が坂道であるか否かを判定できる。
【0079】
マップマッチング手段20は、走行路が「急坂」と判定された場合、地図データベース15から読み出した地図情報のリンクデータから、現在位置検出手段11により検出された現在位置付近の道路(リンク・ノード)において、道路の坂道属性として、「急坂」(坂道)の属性が付与されたリンク・ノードを移動体が走行している道路として特定するマップマッチング処理を行う(ステップS109)。
【0080】
一方、|ΔP|<th2であるとき(ステップS105、NO)、図4に示すように、所定の気圧差ΔPが検出されているものの、窓の開閉や対向車とのすれ違いによる気圧変動よりも変動が小さいため、走行路を「緩坂」であると判定する(ステップS110)。この場合、「緩坂」であるため、ジャイロスコープ13による角速度ωの値も小さくなることが想定される。そのため、|ΔP|<th2であるとき(ステップS105、NO)は、ジャイロスコープ13による角速度ωを参照せずに「緩坂」と判定する。なお、本実施例では、角速度ωを参照せずに「緩坂」と判定したが、後述する実施例2のように角速度ωを参照して「緩坂」(坂道)であるか否かを判定してもよい。
【0081】
マップマッチング手段20は、走行路が「緩坂」と判定された場合、地図データベース15から読み出した地図情報のリンクデータから、現在位置検出手段11により検出された現在位置付近の道路(リンク・ノード)において、道路の坂道属性を表す上り/下り属性として、「緩坂」(坂道)の属性が付与されたリンク・ノードを移動体が走行している道路として特定するマップマッチング処理を行う(ステップS109)。
【0082】
また、|ΔP|≧th2であり(ステップS105、YES)、且つ、th4<ω<th3であるとき(ステップS107、NO)、気圧Pの大きな変動が発生しているが、角速度ωが小さく、又は、図5に示すように、角速度ωが検出されないため、「坂道」ではなく、窓の開閉や対向車とのすれ違いによる気圧変動であると判定し(ステップS111)、当該走行路を「平道」と判定する(ステップS112)。
【0083】
すなわち、気圧差ΔPが閾値th2よりも大きいため、急激な気圧変動が生じていることが分かるが、このような場合では、急な坂道をある一定速度以上(渋滞などでない場合)で走行している場合と、窓の開閉や対向車とのすれ違いによる急激な気圧変動の場合とが考えられる。
【0084】
そして、急な坂道をある一定速度以上で走行している場合では、前述の通り、ジャイロスコープ13による角速度ωは大きく検出される。しかし、坂道ではなく、窓の開閉や対向車とのすれ違いによる急激な気圧変動の場合であれば、ジャイロスコープ13による角速度ωは小さい又は検出されない。
【0085】
そのため、|ΔP|≧th2であり、且つ、th4<ω<th3であるときは、走行路を「平道」と判定することができる。
【0086】
さらに、|ΔP|<th1のときには(ステップS104、NO)、気圧Pの変動が小さいため、当該走行路を「平道」と判定する(ステップS112)。
【0087】
マップマッチング手段20は、走行路が「平道」と判定された場合、地図データベース15から読み出した地図情報のリンクデータから、道路の坂道属性が付与されていないリンク・ノードを移動体が走行している道路として特定するマップマッチング処理を行う(ステップS109)。
【0088】
そして、マップマッチング手段20は、ステップS109でマップマッチング処理を行なった移動体が走行している道路と、現在位置検出手段11が検出した現在位置に基づき、マッチング後の現在位置を算出する。そして、マッチング後の現在位置を示す現在位置マークが地図画像とともに出力手段17に表示される。
【0089】
以上のように、走行路が急坂であるか、緩坂であるか、平道であるかを正しく判定してマップマッチングを行うことにより、移動体を地図画像の正しい位置に表示して、適切な経路案内を行うことができる。
【実施例2】
【0090】
図6は、本発明の実施例2にかかる坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置1における処理フローチャートである。
【0091】
実施例2では、図6に示すフローチャートにおいて、ステップS105において、|ΔP|<th2であるとき、角速度ωの値を判定する閾値th3、th4を新たな閾値th5(th3>th5>0)、th6(0>th6>th4)に変更した後(ステップS110a)、ステップS106以降の処理を行う点で実施例1の処理と異なる。その他の処理は、実施例1と同じであるため、説明を省略する。
【0092】
すなわち、実施例2では、気圧差ΔPの絶対値である変化量|ΔP|が|ΔP|≧th2であり(ステップS105、YES)、且つ、角速度ωがω≧th3又はω≦th4であるとき(ステップS107、YES)(図3参照)、又は、変化量|ΔP|がth2>|ΔP|≧th1の範囲内であり(ステップS105、NO)、且つ、角速度ωがω≧th5又はω≦th6であるとき(ステップS110a、S107)、走行路が「坂道」であると判定する(ステップS108、図7参照)。この場合、ノイズの影響を受けることなく、角速度に基づいた坂道判定を行うことができるとともに、「坂道」である場合と、窓の開閉や対向車とのすれ違いによる気圧変動とを誤認識するリスクを低下させることができる。
【0093】
ここで、th5<th3であり、th6<th4である。すなわち、前述した通り、変化量|ΔP|がth2>|ΔP|≧th1の範囲内である場合は、緩やかな坂(緩坂)を走行していると思われるため、ジャイロスコープ13による角速度ωが小さいことが想定される。そのため、閾値th3及びth4を夫々th5及びth6に置き換えることにより、角速度ωが小さい場合であっても、「坂道」と、窓の開閉や対向車とのすれ違いによる気圧変動とを誤認識するリスクを低下させることができる。
【0094】
なお、本実施例においては、第1閾値はth1であり、第2閾値はth3、th4、th5、th6のいずれかである。
【0095】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で変更することが可能である。
【0096】
例えば、坂道判定手段19は、気圧センサ12により検出された気圧と、ジャイロスコープ13により検出された角速度とに基づいて坂道であるか否かの判定を行うようにしているが、前記気圧と、加速度センサ14により検出された加速度とに基づいて坂道であるか否かの判定を行ってもよい。すなわち、坂道判定手段19は、加速度センサの出力から移動に伴う加速度を除去することで、重力加速度のみを抽出し、この重力加速度に基づいて、坂道か否かの判定を行なう。詳細には、移動に伴う加速度を、現在位置検出手段11で検出された現在位置間の移動距離、現在位置の検出間隔に基づいて算出された移動速度、又は、速度センサを備えている場合であれば、速度センサにより検出される移動速度に基づいて算出し、算出した移動に伴う加速度を用いて、加速度センサの出力から移動に伴う加速度を除去して重力加速度のみを抽出する。そして、重力加速度が垂直方向(上下方向)のみであれば、「平道」と判定することができ、前後方向(進行方向)にも重力加速度が加わっている場合であれば、「坂道」と判定することができる。
【0097】
但し、加速度センサ14を用いる場合、移動速度が高速である場合、移動に伴う加速度成分(前後方向の加速度)が増大するため、加速度センサの出力における重力加速度が閉める割合が小さくなり、重力加速度を精度よく抽出することが困難である。
【0098】
そのため、加速度センサ14のみではなく、気圧センサ12により検出した気圧と、加速度センサ14により検出した加速度とに基づいて坂道であるか否かを判定することで、坂道検出の精度が向上する。この場合、上記の閾値(th3、th4、th5、th6)を例えば、前後方向(進行方向)に重力加速度が加わっているか否かの閾値(又は上下方向に全ての重力加速度が加わっているか否かの閾値)とすることで、坂道であるか否かの判定を行ってもよい。
【0099】
なお、上記の加速度センサ14の出力から移動に伴う加速度を除去して重力加速度のみを抽出する場合のみに限らず、等速で移動している場合であれば加速度センサの出力の変化量(上下方向の加速度、又は前後方向の加速度の変化量)を閾値(th3、th4、th5、th6)と比較し、気圧差の変化量|ΔP|が閾値以上(th1、th2)であり、加速度センサの出力の変化量が閾値以上(th3、th4、th5、th6)の場合に「坂道」と判定してもよい。
【0100】
さらに、気圧センサ12、ジャイロスコープ13及び加速度センサ14を組み合わせてもよい、すなわち、図6のフローチャートにおいて、ステップS107において、角速度ωがω≧th3(th5)又はω≦th4(th6)であるときに坂道と判定したが、これに加えて、前後方向(進行方向)に加わる重力加速度がth3(th5)又はth4(th6)以上である場合、又は加速度センサの出力の変化量がth3(th5)又はth4(th6)以上である場合にのみ、坂道と判定し、それ以外では平道と判定してもよい。
【0101】
また、上述した実施例では、気圧センサ12、ジャイロスコープ13及び/又は加速度センサ14による検出値を用いて、坂道であるか否かを判定するようにしているが、坂道である場合、その判定結果に加えて、例えば、気圧Pの変化量ΔPの正負の符号から、上り坂であるのか下り坂であるのかを判定することもできる。さらに、気圧Pの変化量ΔPから、当該走行路の傾斜角度を求めることもできる。これらの結果を用いて、一層高精度なマップマッチングを行うことが可能となる。
【0102】
なお、上記実施例では、気圧Pの変化量ΔPを算出し、閾値(th1、th2)と比較したが、これに限ることはなく、特許文献1のように、検出された気圧に基づき高度値を算出し、高度差を閾値(th1、th2)と比較してもよいし、さらに、高度差に基づき、勾配を算出し、当該勾配と閾値(th1、th2)とを比較しても良い。
【0103】
また、現在位置検出手段11により検出された現在位置と、地図情報に基づき、現在位置が、高速道路への進入路や分岐路と一般道路(又は高速道路)とが近接している場所付近である場合にのみ本発明の処理を行なってもよい。
【符号の説明】
【0104】
1・・・ナビゲーション装置
10・・・制御手段
11・・・現在位置検出手段
12・・・気圧センサ
13・・・ジャイロスコープ
14・・・加速度センサ
15・・・地図データベース
16・・・入力手段
17・・・出力手段
18・・・経路探索手段
19・・・坂道判定手段
20・・・マップマッチング手段
101・・・CPU
102・・・ROM
103・・・RAM
【技術分野】
【0001】
本発明は、坂道検出装置、坂道検出方法、及び現在位置表示装置に関し、特に、気圧検出と自律航法を併用して、移動体の走行路が坂道であるか否かを検出する坂道検出装置、坂道検出方法、及び現在位置表示装置に関する。
【背景技術】
【0002】
移動体の現在位置を検出し、ディスプレイに表示されている地図画像上に現在位置を示す現在位置マークを重ねて表示するナビゲーション装置において、現在位置を検出する方法として、GPS衛星からの電波を利用したGPS方式(衛星航法方式)と、移動体又はナビゲーション装置に搭載された移動距離算出手段及びジャイロスコープ等の慣性センサを利用して現在位置を推測する自律航法方式とがある。一般的なナビゲーション装置は、これら2つの航法方式が併用される。
【0003】
しかしながら、これらの方式で求めた移動体の現在位置には、誤差が含まれるため、表示されている地図画像の道路と現在位置とが正確に一致せず、検出し又は推測した現在位置をそのままディスプレイに表示すると、実際は道路上にいても、道路から外れた位置に現在位置マークが表示されてしまう場合がある。
【0004】
このような不具合を解消するため、検出した現在位置と、地図データベースに保持されている地図情報の道路とを比較し、各種のマッチング方法を用いて正しい道路上に現在位置をマッチングさせ、表示手段に表示されている地図画像の道路上に現在位置マークを修正して表示するようにしたマップマッチング技術が利用されている。
【0005】
ところで、例えば、高速道路のように、本線と、本線と一般道との連結路である分岐路や進入路(ランプ)と、が接近していたり、分岐路や進入路が本線又は一般道路に対してわずかな分岐角度で設けられている場合、従来のマップマッチング技術だけでは、高速道路の本線を走行しているのか、それとも分岐路や進入路を走行しているのかを確実に判断することが困難であり、地図上の不適切な位置(実際は高速道路本線を走行中に分岐路(一般道路)に現在位置をマッチング)に現在位置マークを表示してしまうことがある。
【0006】
そこで、例えば、分岐路や進入路が上下方向に傾斜した坂道となっていることに注目し、移動体の走行路(移動体が走行している道路)が坂道であるか否かを検出し、その検出結果をマップマッチングに利用することが考えられる。
【0007】
例えば、下記特許文献1(特開2010−39954号公報)は、「坂道検出方法及び坂道検出装置」についての発明を開示している。この方法及び装置では、気圧センサの出力に基づいて高度を算出し、単位走行距離に対する高度差から走行路の勾配を求め、この勾配が所定閾値以下であれば坂道でないと判定する一方、所定時間ごとに求めた勾配が、所定回数以上連続して所定範囲内であれば、その走行路を坂道であると判定している。
【0008】
ところで、気圧センサを用いた場合、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動により、坂道であると誤検出する恐れがあるが、特許文献1では、求めた勾配が所定回数以上連続して所定範囲内のときに坂道であると判定しているため、誤検出を回避することができる。すなわち、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動は一時的な変動であるため、所定回数以上連続して所定範囲内のときにのみ坂道であると判定とすることで、誤検出を回避することができる。
【0009】
また、走行路が坂道であるか否かを検出する手段として、自律航法で使用されるジャイロスコープや加速度センサを利用することもできる。ジャイロスコープは、移動体の移動方向(上下左右等)の変化を角速度として検出することができるため、この角速度に基づいて走行路が坂道であるか否かを検出することができる。また、加速度センサの場合、重力加速度の検出が走行路の傾斜角度に応じて変化することから、この加速度に基づいて走行路が坂道であるか否かを検出することができる。詳細には、平坦な道路で停車している場合では、道路に対して垂直方向(上下方向)にのみ加速度(重力加速度)が出力されるが、坂道(上り坂、下り坂)で停車している場合では、道路に対して垂直方向(上下方向)のみならず、移動体の進行方向(前後方向)に加速度が出力される。すなわち、坂道で停車している場合では、垂直方向(上下方向)と進行方向(前後方向)とに重力加速度が分散されて出力される。そして、出力された垂直方向の加速度と進行方向の加速度に基づき、走行路が坂道であるか否かを検出することができる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2010−39954号公報(段落[0016]〜[0022])
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上記特許文献1の場合、誤検出を回避するために、気圧センサの出力に基づく高度差を複数回算出して坂道であるか否かを判定しており、検出に時間が掛るため、迅速にマッチング処理を行うことが出来ない。この場合、マッチング処理の遅れにより、現在位置に応じた報知などが遅れてしまうことが考えられる。すなわち、ナビゲーション装置であれば、マッチング処理後の現在位置に応じて、経路案内のための報知内容が異なる(右左折案内など)ため、マッチング処理の遅れにより、報知が遅れ、本来、左折すべき交差点を直進してしまうなどの事態が生じうる。
【0012】
また、例えば、経路が探索されている状態において、マッチング処理後の現在位置が探索された経路から逸脱しているような場合では、経路の再探索が行なわれるなど、マッチング処理後の現在位置に応じて処理が異なるため、迅速且つ正確にマッチング処理が行なわれることが望まれる。
【0013】
また、ジャイロスコープは、気圧センサのように、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動の影響を受けることがないため、走行路が坂道であるか否かを迅速に検出することが可能である。しかしながら、渋滞等で移動体の移動速度が遅いときや停車中では、角速度が小さく、又は、角速度を検出できないため、走行路が坂道であるか否かを正確に検出できない場合がある。
【0014】
一方、加速度センサは、移動体が停止している場合であれば、重力方向を検出して車両の傾き(道路の傾斜)を算出可能であるため、走行路が坂道であるか否かを検出することができる。しかしながら、移動体が高速で走行している場合には、移動方向の加速度の影響で、路面に垂直な方向の加速度の誤差が増大するため、走行路が坂道であるか否かを正しく検出することが困難となる。
【0015】
本発明は、上記の問題点を解消することを課題とするものであり、移動体の走行路が坂道であるか否かを迅速且つ正確に検出することのできる坂道検出装置及び坂道検出方法を提供することを目的とするものである。
【0016】
また、本発明は、移動体の実際の現在位置を迅速且つ正確にマップマッチングし、現在位置を示すマークをディスプレイに表示することのできる現在位置表示装置を提供することを目的とするものである。
【課題を解決するための手段】
【0017】
前記課題を解決するために、本願の請求項1にかかる発明は、移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段と、を備えることを特徴とする。
【0018】
本願の請求項2にかかる発明は、請求項1記載の坂道検出装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする。
【0019】
本願の請求項3にかかる発明は、請求項1又は2記載の坂道検出装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする。
【0020】
本願の請求項4にかかる発明は、請求項2又は3に記載の坂道検出装置において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする。
【0021】
本願の請求項5にかかる発明は、移動体の走行路が坂道であるか否かを検出する坂道検出方法において、気圧を検出するステップと、角速度及び/又は加速度を検出するステップと、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定するステップと、を含むことを特徴とする。
【0022】
本願の請求項6にかかる発明は、請求項5に記載の坂道検出方法において、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が前記第2閾値よりも小さいとき、前記移動体の走行路を平道と判定するステップを含むことを特徴とする。
【0023】
本願の請求項7にかかる発明は、請求項5又は6に記載の坂道検出方法において、前記気圧の変化量に応じて前記第2閾値を変更するステップを含むことを特徴とする。
【0024】
本願の請求項8にかかる発明は、移動体の現在位置を検出する現在位置検出手段と、地図情報を保持する地図データベースと、前記現在位置検出手段により検出された前記現在位置及び前記地図情報に基づきマッチング処理するマップマッチング手段と、前記マッチング処理に基づく現在位置を示すマークを表示する表示手段とを備える現在位置表示装置において、前記現在位置表示装置は、さらに気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の走行路が坂道であるか否かを判定する坂道判定手段と、を備え、前記マップマッチング手段は、前記坂道判定手段による判定結果に基づいてマッチング処理することを特徴とする。
【0025】
本願の請求項9にかかる発明は、請求項8に記載の現在位置表示装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする。
【0026】
本願の請求項10にかかる発明は、請求項8又は9に記載の現在位置表示装置において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする。
【0027】
本願の請求項11にかかる発明は、請求項9又は10に記載の現在位置表示装置において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする。
【発明の効果】
【0028】
請求項1にかかる発明においては、移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段(例えば、ジャイロスコープ、加速度センサ)と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段と、を備える。
【0029】
このように構成することにより、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動を坂道であると誤判定することがなく、坂道を迅速且つ正確に検出することができる。
【0030】
請求項2にかかる発明においては、請求項1にかかる発明において、坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することができる。
【0031】
請求項3にかかる発明においては、請求項1又は2にかかる発明において、坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することができる。
【0032】
請求項4にかかる発明においては、請求項2又は3にかかる発明において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更する。例えば、気圧の変化量が大きいときには、坂道である可能性があり、角速度又は加速度も大きくなる可能性があるため、第2閾値を大きい値に設定し、ノイズの影響を受けない状態で坂道であるか否かを判定することができる。また、気圧の変化量が小さいときには、緩い坂道である可能性があり、角速度又は加速度も小さくなる可能性があるため、第2閾値を小さい値に設定することで、検出値の小さい角速度又は加速度を検出し、坂道であるか否かを判定することができる。
【0033】
請求項5にかかる発明においては、移動体の走行路が坂道であるか否かを検出する坂道検出方法において、気圧を検出するステップと、角速度及び/又は加速度を検出するステップと、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定するステップと、を含む。
【0034】
このような判定処理を行うことにより、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動を坂道であると誤判定することがなく、坂道を迅速且つ正確に検出することができる。
【0035】
請求項6にかかる発明においては、請求項5に記載の発明において、前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が前記第2閾値よりも小さいとき、前記移動体の走行路を平道と判定するステップを含む。このように処理することにより、坂道と平道とを判別することができる。
【0036】
請求項7にかかる発明においては、請求項5又は6に記載の発明において、前記気圧の変化量に応じて前記第2閾値を変更するステップを含む。このように処理することにより、ノイズの影響を受けることなく、坂道であるか否かを正確に検出することができる。
【0037】
請求項8にかかる発明においては、移動体の現在位置を検出する現在位置検出手段と、地図情報を保持する地図データベースと、前記現在位置検出手段により検出された前記現在位置及び前記地図情報に基づきマッチング処理するマップマッチング手段と、前記マッチング処理に基づく現在位置を示すマークを表示する表示手段とを備える現在位置表示装置において、前記現在位置表示装置は、さらに気圧を検出する気圧検出手段と、角速度及び/又は加速度を検出する自律航法手段と、前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の走行路が坂道であるか否かを判定する坂道判定手段と、を備え、前記マップマッチング手段は、前記坂道判定手段による判定結果に基づいてマッチング処理する。
【0038】
このように構成することにより、窓の開閉や対向車両とのすれ違いの際に生じる気圧変動を坂道であると誤判定することがなく、坂道であるか否かを迅速且つ正確に判定し、その判定結果に基づき、正しいマッチング処理を行い、現在位置を示すマークを表示手段に表示させることができる。
【0039】
請求項9にかかる発明においては、請求項8に記載の発明において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することができる。
【0040】
請求項10にかかる発明においては、請求項8又は9に記載の発明において、前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することができる。
【0041】
請求項11にかかる発明においては、請求項9又は10に記載の発明において、前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更する。このように処理することにより、ノイズの影響を受けることなく、坂道であるか否かを正確に検出することができる。
【図面の簡単な説明】
【0042】
【図1】本発明の坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置のブロック図である。
【図2】図1に示すナビゲーション装置における実施例1の処理フローチャートである。
【図3】図2の処理フローチャートにおいて、移動体が急坂を走行しているときに検出される気圧及び角速度の説明図である。
【図4】図2の処理フローチャートにおいて、移動体が緩坂を走行しているときに検出される気圧及び角速度の説明図である。
【図5】図2の処理フローチャートにおいて、移動体が平道を走行しているときに検出される気圧及び角速度の説明図である。
【図6】図1に示すナビゲーション装置における実施例2の処理フローチャートである。
【図7】図6の処理フローチャートにおいて、移動体が緩坂を走行しているときに検出される気圧及び角速度の説明図である。
【発明を実施するための形態】
【0043】
以下、本発明の具体例を実施例及び図面、図1〜図7を参照して詳細に説明する。ただし、以下に示す実施例は、本発明の技術思想を具体化するための坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置を例示して説明するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の坂道検出装置、坂道検出方法、及び現在位置表示装置にも等しく適用し得るものである。
【実施例1】
【0044】
図1は、本発明の実施例1にかかる坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置1のブロック図を示す。
【0045】
ナビゲーション装置1は、自動車等の移動体に搭載され、移動体の現在位置を地図画像とともにディスプレイ(出力手段17)に表示して、移動体に乗車しているユーザが目的地まで移動するための支援を行うものである。ナビゲーション装置1は、制御手段10、現在位置検出手段11、気圧センサ12、ジャイロスコープ13、加速度センサ14、地図データベース15、入力手段16、出力手段17、経路探索手段18、坂道判定手段19及びマップマッチング手段20を備えて構成される。なお、各部はバスなどで接続されており、例えば、制御手段10は、気圧センサ12が検出、出力した気圧を取得することが可能である。
【0046】
制御手段10は、CPU101、RAM103、ROM102を備えて構成されており、RAM103及び/又はROM102に記憶された制御プログラムをCPU101が実行することにより、下記に説明する各部の動作を制御・統括する。
【0047】
現在位置検出手段11は、地球上空を周回している複数のGPS衛星からの信号を所定の時間間隔で受信し、この信号に含まれている時刻情報及び衛星位置情報に基づいて移動体の現在位置を算出する。
【0048】
気圧センサ12(気圧検出手段)は、移動体の現在位置における気圧を検出する気圧検出手段である。検出した気圧は、後述する坂道判定のため、制御手段10のRAM103に一時記憶される。
【0049】
ジャイロスコープ13(角速度検出手段)は、少なくとも移動体の走行中における上下方向(ピッチ角)に対する方向変化を角速度として検出する角速度検出手段である。検出した角速度は、後述する坂道判定のため、制御手段10のRAM103に一時記憶される。
【0050】
加速度センサ14(加速度検出手段)は、少なくとも垂直な方向(上下方向)と、進行方向(前後方向)の加速度を検出する加速度検出手段である。検出した加速度は、後述する坂道判定のため、制御手段10のRAM103に一時記憶される。なお、加速度センサ14は、一般的にはナビゲーション装置1の上下、左右、前後の3軸方向の加速度を検出する3軸加速度センサで構成される。加速度センサ14は、平坦な道路で停止中であれば、垂直な方向(上下方向)の加速度(重力加速度)のみを出力するので、加速度センサの出力が垂直な方向(上下方向)のみであれば、平坦な道路で停車していることがわかり、また、停車中に、垂直な方向(上下方向)に加えて、前後方向の加速度も検出される場合、坂道で停車していることが分かる。
【0051】
なお、ジャイロスコープ13及び加速度センサ14は、移動体の現在位置を移動体自身で検出するための自律航法センサを構成するものでもあり、現在位置検出手段11がGPS衛星から受信した信号に基づいて算出した現在位置を補完するためにも利用可能である。また、自律航法センサを備えることで、GPS衛星信号を受信できないトンネルや地下街、地下駐車場、建物内の駐車場、又は、高層ビル街等、GPS衛星信号の反射によるマルチパスの影響を受ける場所でも、ジャイロスコープ13や加速度センサ14からの出力によりナビゲーション装置1の現在位置を算出することができる。すなわち、ジャイロスコープ13や加速度センサ14などで構成される自律航法センサも現在位置検出手段11へ含めてもよい。
【0052】
地図データベース15は、道路データ、建物データ、背景データ、テキストデータから構成される地図情報を保持する。
【0053】
道路データは、道路をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータとから構成される。
【0054】
ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、交差点情報や交差点名称を示す情報等のノード属性、坂道(緩急を含んでもよい)を表す坂道属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0055】
また、リンクデータは、リンクの始点及び終点となるノード番号、高速道路や一般道や街路等を区別するための道路種別、それぞれの道路の本線や連結路、分岐路を区別するための道路種別、さらに道路の傾斜方向、傾斜角度、坂道(緩急を含んでもよい)を表す坂道属性、距離及び/又は所要時間、国道○号線のような道路名称、進行方向のデータを含んで構成される。リンクデータは上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0056】
建物データは、建物の位置座標(緯度・経度)、駅、ビル、民家等の建物の種別、表示色のデータを含んで構成される。また背景データは、海岸線、湖沼、河川形状、山林等の背景画像データとなる少なくとも3点からなる位置座標(緯度・経度)、表示色のデータを含んで構成される。テキストデータは、それぞれの地名や河川名等の文字(名称)、及びその座標(緯度・経度)のデータを含んで構成される。
【0057】
なお、ナビゲーション装置1は、地図データベース15をナビゲーショ装置1に内蔵したスタンドアロン型のものとしているが、本発明はこれに限定されることはない。例えば、ナビゲーション装置1に通信手段(図示せず)を設け、ナビゲーション装置1の外部の情報提供サーバ(図示せず)に接続して通信を行い、情報提供サーバに備えられた地図データベースから案内経路に関連付けられた地図情報を取得するようにしてもよい。
【0058】
その場合、ナビゲーション装置1は出発地又は現在位置と目的地とを指定し、これを経路探索条件として情報提供サーバに送信し、経路探索を依頼する。情報提供サーバは、経路探索手段を備え、ナビゲーション装置1から受信した出発地又は現在位置と目的地とを経路探索条件として経路探索を行い、探索結果を含む地図情報をナビゲーション装置1へ送信する。
【0059】
入力手段16は、経路探索を行うために、ユーザが出発地、目的地等の経路探索条件をナビゲーション装置1に入力するためのキーやタッチパネルから構成される。
【0060】
出力手段17は、現在位置マーク、地図画像、案内経路等を表示する液晶表示パネル(ディスプレイ)と、ユーザに対して音声で必要な情報を提供するスピーカとから構成される。
【0061】
経路探索手段18は、入力手段16を用いてユーザが入力した経路探索条件に従い、地図データベース15に記憶されている地図情報を参照して最適な経路(案内経路)を探索するものである。経路探索手段18は、出発地又は現在位置に対応する道路のノードから目的地に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路として探索する。
【0062】
なお、経路探索手段18は、外部の情報提供サーバから通信手段を介して地図情報を取得し、経路探索を行うものであってもよい。また、地図データベースとともに経路探索手段を外部の情報提供サーバに設置し、ナビゲーション装置1が外部から案内経路を取得するように構成することもできる。
【0063】
坂道判定手段19は、気圧センサ12により検出された気圧の変化量と、ジャイロスコープ13により検出された角速度とに基づき、移動体の走行路が坂道であるか否かを判定するものである。坂道判定手段19は、走行路が坂道である場合、その坂道が急坂なのか緩坂なのかを判定することもできる。さらに、坂道判定手段19は、気圧の変化量と、加速度センサ14により検出された加速度とに基づき、移動体の走行路が坂道であるか否かを判定するようにしてもよい。さらにまた、気圧の変化量、角速度及び加速度に基づいて坂道であるか否かを判定してもよい。
【0064】
マップマッチング手段20は、現在位置検出手段11によって算出された現在位置を仮の現在位置とし、坂道判定手段19により判定された坂道であるか否かの判定結果に従い、その仮の現在位置の近隣にあるマップマッチングの候補となるリンク、例えば、高速道路の本線に対応するリンク、本線からわずかな傾斜角度で分岐している分岐路や進入路等に対応したリンクを特定する。
【0065】
次に、以上のように構成されるナビゲーション装置1を用いた経路案内処理について説明する。
【0066】
ユーザが、入力手段16を用いて、出発地、目的地、経由地等の経路探索条件を入力すると、経路探索手段18は、地図データベース15に記憶されている地図情報を参照して、出発地又は現在位置から目的地までの案内経路を探索する。案内経路は、出発地又は現在位置に対応する道路のノードから目的地に対応する道路のノードに至るまでのリンク・ノードをダイクストラ法等の手法によって探索し、時間、距離、費用等のリンクコストのうち、ユーザが所望するリンクコストの累積値が最小となる経路を案内経路として探索することができる。探索された案内経路は、地図データベース15から読み出した地図情報に基づく地図画像とともに、ナビゲーション装置1の液晶表示パネル等の出力手段17に表示される。
【0067】
一方、ナビゲーション装置1の現在位置検出手段11は、GPS衛星から時刻情報及び衛星位置情報を含む信号を受信し、これらの情報に基づいて移動体の現在位置を算出する。そして、算出された現在位置に基づいた現在位置マークが地図画像及び案内経路とともに出力手段17に表示される。ユーザは、出力手段17に表示された地図画像、現在位置マーク及び案内経路に従い、所望の目的地まで移動することができる。
【0068】
ところで、現在位置検出手段11が算出した現在位置には、誤差が含まれているため、算出された現在位置にそのまま現在位置マークを表示すると、地図画像上の適切な位置に表示されない場合がある。そのため、マッチング処理により適切な現在位置を特定し、現在位置マークを表示する位置(現在位置)を修正する必要がある。
【0069】
そこで、図2に示す処理フローチャートに従い、移動体の走行路が坂道であるか否かを判定し、その判定結果を用いて適切なマッチング処理を行う方法について説明する。
【0070】
まず、ナビゲーション装置1の気圧センサ12は、気圧Pを所定時間毎に検出する(ステップS101)。検出した気圧Pは、制御手段10のRAM103に一時記憶される。
【0071】
また、ナビゲーション装置1のジャイロスコープ13は、上下方向に対する方向変化を示す角速度ωを所定時間毎に検出する(ステップS102)。検出した角速度ωは、気圧Pと同様に、制御手段10のRAM103に一時記憶される。
【0072】
次に、坂道判定手段19は、前回検出された気圧P(RAM103に記憶されている)と、今回検出された気圧Pとの差である気圧差ΔPを算出する(ステップS103)。なお、気圧差ΔPは、前回検出された気圧Pと今回検出された気圧Pとの差に限られるものではなく、複数回前に検出された気圧Pと今回検出された気圧P、又は、複数回前に検出された連続した複数の気圧Pの平均値と、今回検出された気圧Pを含む連続した複数の気圧Pの平均値の差として求めたものであってもよい。
【0073】
次いで、坂道判定手段19は、気圧差ΔPの絶対値である変化量|ΔP|を所定の閾値th1(>0)と比較する。|ΔP|≧th1であるとき(ステップS104、YES)、さらに、変化量|ΔP|を閾値th1よりも大きい閾値th2(>th1)(第1閾値)と比較する。|ΔP|≧th2であるとき(ステップS105、YES)、走行路の高度が大きく変化していることが想定される。例えば、図3に示すように、時刻t1、t2間で気圧Pが大きく低下している場合、走行路が急な上り坂であることが想定される。急な下り坂の場合も同様に、気圧Pが大きく上昇し、変化量|ΔP|が大きくなる。
【0074】
ステップS105において、坂道判定手段19が|ΔP|≧th2と判定した場合、坂道判定手段19は、この変化量|ΔP|が発生した期間の前後の時刻t1、t2近傍で検出した角速度ωをRAM103から読み出す(ステップS106)。すなわち、ジャイロスコープ13は上下方向に対する方向変化を示す角速度ωを検出するものであるため、坂道の始まりと、坂道の終わりに角速度ω(坂道による角速度ω)が検出される。また、角速度ωは、上下方向の方向変化があると検出されるが、閾値th2以上の変化量|ΔP|は、方向変化後、所定距離走行しなければ検出されないことが考えられる。そのため、変化量|ΔP|が発生した期間の前後の時刻t1、t2近傍で検出した角速度ωをRAM103から読み出している。
【0075】
次に、坂道判定手段19は、角速度ωを所定の閾値th3(>0)(第2閾値)、th4(<0)(第2閾値)と比較する。ω≧th3又はω≦th4であるとき(ステップS107、YES)、時刻t1、t2近傍で走行路の傾斜が大きく変化していることが想定される。従って、ステップS105の判定結果(YES)と、ステップS107の判定結果(YES)とに基づき、走行路が「急坂」であると判定する(ステップS108)。
【0076】
なお、角速度ωは、上下方向によって数値が逆転(プラスマイナス)するため、閾値th3及び閾値th4を設ける。なお、本実施例では、閾値th3が上りの際の閾値であり、閾値th4が下りの際の閾値である。また、|th3|=|th4|としてもよい。さらに、角速度ωがプラスであれば閾値th3と比較し、角速度ωがマイナスであれば|ω|と|th4|とを比較しても良い。そして。角速度|ω|がth3又は|th4|(第2閾値)以上であれば「急坂」と判定してもよい。なお、この比較方法は他の比較においても同様である。
【0077】
すなわち、気圧差ΔPの絶対値である変化量|ΔP|が所定の閾値th2(th2>th1)以上であり、且つ、角速度ωが所定の閾値th3(>0)以上、又は、所定の閾値th4(<0)以下の場合には、走行路の高度変化以外の原因で気圧Pが変動したのではないため、その走行路を確実に「急坂」であると判定することができる。
【0078】
なお、時刻t1、t2で例示したが、時刻t1において変化量|ΔP|が検出された時点で、本フローチャートを行なうことで、早急に、走行路が坂道であるか否かを判定できる。
【0079】
マップマッチング手段20は、走行路が「急坂」と判定された場合、地図データベース15から読み出した地図情報のリンクデータから、現在位置検出手段11により検出された現在位置付近の道路(リンク・ノード)において、道路の坂道属性として、「急坂」(坂道)の属性が付与されたリンク・ノードを移動体が走行している道路として特定するマップマッチング処理を行う(ステップS109)。
【0080】
一方、|ΔP|<th2であるとき(ステップS105、NO)、図4に示すように、所定の気圧差ΔPが検出されているものの、窓の開閉や対向車とのすれ違いによる気圧変動よりも変動が小さいため、走行路を「緩坂」であると判定する(ステップS110)。この場合、「緩坂」であるため、ジャイロスコープ13による角速度ωの値も小さくなることが想定される。そのため、|ΔP|<th2であるとき(ステップS105、NO)は、ジャイロスコープ13による角速度ωを参照せずに「緩坂」と判定する。なお、本実施例では、角速度ωを参照せずに「緩坂」と判定したが、後述する実施例2のように角速度ωを参照して「緩坂」(坂道)であるか否かを判定してもよい。
【0081】
マップマッチング手段20は、走行路が「緩坂」と判定された場合、地図データベース15から読み出した地図情報のリンクデータから、現在位置検出手段11により検出された現在位置付近の道路(リンク・ノード)において、道路の坂道属性を表す上り/下り属性として、「緩坂」(坂道)の属性が付与されたリンク・ノードを移動体が走行している道路として特定するマップマッチング処理を行う(ステップS109)。
【0082】
また、|ΔP|≧th2であり(ステップS105、YES)、且つ、th4<ω<th3であるとき(ステップS107、NO)、気圧Pの大きな変動が発生しているが、角速度ωが小さく、又は、図5に示すように、角速度ωが検出されないため、「坂道」ではなく、窓の開閉や対向車とのすれ違いによる気圧変動であると判定し(ステップS111)、当該走行路を「平道」と判定する(ステップS112)。
【0083】
すなわち、気圧差ΔPが閾値th2よりも大きいため、急激な気圧変動が生じていることが分かるが、このような場合では、急な坂道をある一定速度以上(渋滞などでない場合)で走行している場合と、窓の開閉や対向車とのすれ違いによる急激な気圧変動の場合とが考えられる。
【0084】
そして、急な坂道をある一定速度以上で走行している場合では、前述の通り、ジャイロスコープ13による角速度ωは大きく検出される。しかし、坂道ではなく、窓の開閉や対向車とのすれ違いによる急激な気圧変動の場合であれば、ジャイロスコープ13による角速度ωは小さい又は検出されない。
【0085】
そのため、|ΔP|≧th2であり、且つ、th4<ω<th3であるときは、走行路を「平道」と判定することができる。
【0086】
さらに、|ΔP|<th1のときには(ステップS104、NO)、気圧Pの変動が小さいため、当該走行路を「平道」と判定する(ステップS112)。
【0087】
マップマッチング手段20は、走行路が「平道」と判定された場合、地図データベース15から読み出した地図情報のリンクデータから、道路の坂道属性が付与されていないリンク・ノードを移動体が走行している道路として特定するマップマッチング処理を行う(ステップS109)。
【0088】
そして、マップマッチング手段20は、ステップS109でマップマッチング処理を行なった移動体が走行している道路と、現在位置検出手段11が検出した現在位置に基づき、マッチング後の現在位置を算出する。そして、マッチング後の現在位置を示す現在位置マークが地図画像とともに出力手段17に表示される。
【0089】
以上のように、走行路が急坂であるか、緩坂であるか、平道であるかを正しく判定してマップマッチングを行うことにより、移動体を地図画像の正しい位置に表示して、適切な経路案内を行うことができる。
【実施例2】
【0090】
図6は、本発明の実施例2にかかる坂道検出装置、坂道検出方法、及び現在位置表示装置が適用されるナビゲーション装置1における処理フローチャートである。
【0091】
実施例2では、図6に示すフローチャートにおいて、ステップS105において、|ΔP|<th2であるとき、角速度ωの値を判定する閾値th3、th4を新たな閾値th5(th3>th5>0)、th6(0>th6>th4)に変更した後(ステップS110a)、ステップS106以降の処理を行う点で実施例1の処理と異なる。その他の処理は、実施例1と同じであるため、説明を省略する。
【0092】
すなわち、実施例2では、気圧差ΔPの絶対値である変化量|ΔP|が|ΔP|≧th2であり(ステップS105、YES)、且つ、角速度ωがω≧th3又はω≦th4であるとき(ステップS107、YES)(図3参照)、又は、変化量|ΔP|がth2>|ΔP|≧th1の範囲内であり(ステップS105、NO)、且つ、角速度ωがω≧th5又はω≦th6であるとき(ステップS110a、S107)、走行路が「坂道」であると判定する(ステップS108、図7参照)。この場合、ノイズの影響を受けることなく、角速度に基づいた坂道判定を行うことができるとともに、「坂道」である場合と、窓の開閉や対向車とのすれ違いによる気圧変動とを誤認識するリスクを低下させることができる。
【0093】
ここで、th5<th3であり、th6<th4である。すなわち、前述した通り、変化量|ΔP|がth2>|ΔP|≧th1の範囲内である場合は、緩やかな坂(緩坂)を走行していると思われるため、ジャイロスコープ13による角速度ωが小さいことが想定される。そのため、閾値th3及びth4を夫々th5及びth6に置き換えることにより、角速度ωが小さい場合であっても、「坂道」と、窓の開閉や対向車とのすれ違いによる気圧変動とを誤認識するリスクを低下させることができる。
【0094】
なお、本実施例においては、第1閾値はth1であり、第2閾値はth3、th4、th5、th6のいずれかである。
【0095】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で変更することが可能である。
【0096】
例えば、坂道判定手段19は、気圧センサ12により検出された気圧と、ジャイロスコープ13により検出された角速度とに基づいて坂道であるか否かの判定を行うようにしているが、前記気圧と、加速度センサ14により検出された加速度とに基づいて坂道であるか否かの判定を行ってもよい。すなわち、坂道判定手段19は、加速度センサの出力から移動に伴う加速度を除去することで、重力加速度のみを抽出し、この重力加速度に基づいて、坂道か否かの判定を行なう。詳細には、移動に伴う加速度を、現在位置検出手段11で検出された現在位置間の移動距離、現在位置の検出間隔に基づいて算出された移動速度、又は、速度センサを備えている場合であれば、速度センサにより検出される移動速度に基づいて算出し、算出した移動に伴う加速度を用いて、加速度センサの出力から移動に伴う加速度を除去して重力加速度のみを抽出する。そして、重力加速度が垂直方向(上下方向)のみであれば、「平道」と判定することができ、前後方向(進行方向)にも重力加速度が加わっている場合であれば、「坂道」と判定することができる。
【0097】
但し、加速度センサ14を用いる場合、移動速度が高速である場合、移動に伴う加速度成分(前後方向の加速度)が増大するため、加速度センサの出力における重力加速度が閉める割合が小さくなり、重力加速度を精度よく抽出することが困難である。
【0098】
そのため、加速度センサ14のみではなく、気圧センサ12により検出した気圧と、加速度センサ14により検出した加速度とに基づいて坂道であるか否かを判定することで、坂道検出の精度が向上する。この場合、上記の閾値(th3、th4、th5、th6)を例えば、前後方向(進行方向)に重力加速度が加わっているか否かの閾値(又は上下方向に全ての重力加速度が加わっているか否かの閾値)とすることで、坂道であるか否かの判定を行ってもよい。
【0099】
なお、上記の加速度センサ14の出力から移動に伴う加速度を除去して重力加速度のみを抽出する場合のみに限らず、等速で移動している場合であれば加速度センサの出力の変化量(上下方向の加速度、又は前後方向の加速度の変化量)を閾値(th3、th4、th5、th6)と比較し、気圧差の変化量|ΔP|が閾値以上(th1、th2)であり、加速度センサの出力の変化量が閾値以上(th3、th4、th5、th6)の場合に「坂道」と判定してもよい。
【0100】
さらに、気圧センサ12、ジャイロスコープ13及び加速度センサ14を組み合わせてもよい、すなわち、図6のフローチャートにおいて、ステップS107において、角速度ωがω≧th3(th5)又はω≦th4(th6)であるときに坂道と判定したが、これに加えて、前後方向(進行方向)に加わる重力加速度がth3(th5)又はth4(th6)以上である場合、又は加速度センサの出力の変化量がth3(th5)又はth4(th6)以上である場合にのみ、坂道と判定し、それ以外では平道と判定してもよい。
【0101】
また、上述した実施例では、気圧センサ12、ジャイロスコープ13及び/又は加速度センサ14による検出値を用いて、坂道であるか否かを判定するようにしているが、坂道である場合、その判定結果に加えて、例えば、気圧Pの変化量ΔPの正負の符号から、上り坂であるのか下り坂であるのかを判定することもできる。さらに、気圧Pの変化量ΔPから、当該走行路の傾斜角度を求めることもできる。これらの結果を用いて、一層高精度なマップマッチングを行うことが可能となる。
【0102】
なお、上記実施例では、気圧Pの変化量ΔPを算出し、閾値(th1、th2)と比較したが、これに限ることはなく、特許文献1のように、検出された気圧に基づき高度値を算出し、高度差を閾値(th1、th2)と比較してもよいし、さらに、高度差に基づき、勾配を算出し、当該勾配と閾値(th1、th2)とを比較しても良い。
【0103】
また、現在位置検出手段11により検出された現在位置と、地図情報に基づき、現在位置が、高速道路への進入路や分岐路と一般道路(又は高速道路)とが近接している場所付近である場合にのみ本発明の処理を行なってもよい。
【符号の説明】
【0104】
1・・・ナビゲーション装置
10・・・制御手段
11・・・現在位置検出手段
12・・・気圧センサ
13・・・ジャイロスコープ
14・・・加速度センサ
15・・・地図データベース
16・・・入力手段
17・・・出力手段
18・・・経路探索手段
19・・・坂道判定手段
20・・・マップマッチング手段
101・・・CPU
102・・・ROM
103・・・RAM
【特許請求の範囲】
【請求項1】
移動体の走行路が坂道であるか否かを検出する坂道検出装置において、
気圧を検出する気圧検出手段と、
角速度及び/又は加速度を検出する自律航法手段と、
前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段と、
を備えることを特徴とする坂道検出装置。
【請求項2】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする請求項1に記載の坂道検出装置。
【請求項3】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする請求項1又は2に記載の坂道検出装置。
【請求項4】
前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする請求項2又は3に記載の坂道検出装置。
【請求項5】
移動体の走行路が坂道であるか否かを検出する坂道検出方法において、
気圧を検出するステップと、
角速度及び/又は加速度を検出するステップと、
前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定するステップと、
を含むことを特徴とする坂道検出方法。
【請求項6】
前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が前記第2閾値よりも小さいとき、前記移動体の走行路を平道と判定するステップを含むことを特徴とする請求項5に記載の坂道検出方法。
【請求項7】
前記気圧の変化量に応じて前記第2閾値を変更するステップを含むことを特徴とする請求項5又は6に記載の坂道検出方法。
【請求項8】
移動体の現在位置を検出する現在位置検出手段と、地図情報を保持する地図データベースと、前記現在位置検出手段により検出された前記現在位置及び前記地図情報に基づきマッチング処理するマップマッチング手段と、マッチング処理に基づく現在位置を示すマークを表示する表示手段とを備える現在位置表示装置において、
前記現在位置表示装置は、さらに
気圧を検出する気圧検出手段と、
角速度及び/又は加速度を検出する自律航法手段と、
前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の走行路が坂道であるか否かを判定する坂道判定手段と、
を備え、前記マップマッチング手段は、前記坂道判定手段による判定結果に基づいてマッチング処理することを特徴とする現在位置表示装置。
【請求項9】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする請求項8に記載の現在位置表示装置。
【請求項10】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする請求項8又は9に記載の現在位置表示装置。
【請求項11】
前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする請求項9又は10に記載の現在位置表示装置。
【請求項1】
移動体の走行路が坂道であるか否かを検出する坂道検出装置において、
気圧を検出する気圧検出手段と、
角速度及び/又は加速度を検出する自律航法手段と、
前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段と、
を備えることを特徴とする坂道検出装置。
【請求項2】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする請求項1に記載の坂道検出装置。
【請求項3】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする請求項1又は2に記載の坂道検出装置。
【請求項4】
前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする請求項2又は3に記載の坂道検出装置。
【請求項5】
移動体の走行路が坂道であるか否かを検出する坂道検出方法において、
気圧を検出するステップと、
角速度及び/又は加速度を検出するステップと、
前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定するステップと、
を含むことを特徴とする坂道検出方法。
【請求項6】
前記気圧の変化量が第1閾値以上であり、且つ、前記角速度及び/又は前記加速度が前記第2閾値よりも小さいとき、前記移動体の走行路を平道と判定するステップを含むことを特徴とする請求項5に記載の坂道検出方法。
【請求項7】
前記気圧の変化量に応じて前記第2閾値を変更するステップを含むことを特徴とする請求項5又は6に記載の坂道検出方法。
【請求項8】
移動体の現在位置を検出する現在位置検出手段と、地図情報を保持する地図データベースと、前記現在位置検出手段により検出された前記現在位置及び前記地図情報に基づきマッチング処理するマップマッチング手段と、マッチング処理に基づく現在位置を示すマークを表示する表示手段とを備える現在位置表示装置において、
前記現在位置表示装置は、さらに
気圧を検出する気圧検出手段と、
角速度及び/又は加速度を検出する自律航法手段と、
前記気圧検出手段により検出された前記気圧と、前記自律航法手段により検出された前記角速度及び/又は前記加速度とに基づき、前記移動体の走行路が坂道であるか否かを判定する坂道判定手段と、
を備え、前記マップマッチング手段は、前記坂道判定手段による判定結果に基づいてマッチング処理することを特徴とする現在位置表示装置。
【請求項9】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値以上であるとき、前記移動体の走行路を坂道と判定することを特徴とする請求項8に記載の現在位置表示装置。
【請求項10】
前記坂道判定手段は、前記気圧検出手段により検出された前記気圧の変化量が第1閾値以上であり、且つ、前記自律航法手段により検出された前記角速度及び/又は前記加速度が第2閾値よりも小さいとき、前記移動体の走行路を平道と判定することを特徴とする請求項8又は9に記載の現在位置表示装置。
【請求項11】
前記坂道判定手段は、前記気圧の変化量に応じて前記第2閾値を変更することを特徴とする請求項9又は10に記載の現在位置表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−32277(P2012−32277A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−172051(P2010−172051)
【出願日】平成22年7月30日(2010.7.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月30日(2010.7.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]