
埋設物探査装置
【課題】移動方向の測定精度を向上させた埋設物探査装置を提供する。
【解決手段】埋設物探査装置100は探査用電磁波の送受に係る構成機器として、送信器11と、送信アンテナ12と、受信アンテナ13と、受信器14と、を含んでいる。また、装置100は受信器14が取得した受信信号を記憶する受信データバッファメモリ22と、装置100の一定移動距離毎にサンプリング信号を受信データバッファメモリ22に供給して、当該位置における受信信号を取り込むサンプリング回路24と、装置100の移動量を検出するロータリエンコーダ18と、サンプリング信号を補間サンプリング信号に変換する補間回路26と、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路28と、を含んでいる。
【解決手段】埋設物探査装置100は探査用電磁波の送受に係る構成機器として、送信器11と、送信アンテナ12と、受信アンテナ13と、受信器14と、を含んでいる。また、装置100は受信器14が取得した受信信号を記憶する受信データバッファメモリ22と、装置100の一定移動距離毎にサンプリング信号を受信データバッファメモリ22に供給して、当該位置における受信信号を取り込むサンプリング回路24と、装置100の移動量を検出するロータリエンコーダ18と、サンプリング信号を補間サンプリング信号に変換する補間回路26と、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路28と、を含んでいる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、埋設面を移動しながら埋設体にある埋設物を探査する埋設物探査装置に関する。
【背景技術】
【0002】
近年、地表を移動しながら電磁波を用いて埋設物を探査する技術が利用されるようになった。この技術を用いると、地面を掘り起こすことなく地中埋設物を発見でき、また、地中の埋設物探査に限らずコンクリート構造物の鉄筋などを発見することも可能である。
【0003】
このような埋設物探査装置は、電磁波を送信アンテナから埋設体例えばコンクリート構造物に向けて放射し、その電磁波がコンクリートと電気的性質の異なる鉄筋や空洞などの反射物体との境界面で反射され、受信アンテナに到達するまでの伝搬時間から反射物体までの距離を求め、装置がコンクリート表面を移動することにより所望の埋設体映像を得ることができる。
【0004】
埋設体映像を得る目的で使用する場合、埋設物探査装置の移動量を正確に測定することが必要となる。特許文献1には、埋設物探査装置の移動に伴い左右輪に取りつけられたロータリエンコーダとツインエンコーダ回路を介してコントローラに正確な移動量を供給する構成が示されている。
【0005】
【特許文献1】特開平5−196729号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の埋設物探査装置においては、装置が地表あるいは埋設面を移動しながら前述した反射信号を受信して埋設体中の画像を形成する。このときの画像サンプリングは、装置の所定移動量ごとに出力されるサンプリング信号により行われる。このために、装置の車輪には前述したようにロータリエンコーダが取り付けられ、例えば5mmの移動間隔でサンプリング信号が出力され、これによって移動方向の分解能が定まる。
【0007】
受信アンテナによって取り込まれる受信信号は、一旦受信データバッファメモリに記憶されるが、この記憶された受信信号は全部が画像形成に用いられることなく、サンプリング信号の出力タイミングでのみ画像形成用の受信信号が抽出される。したがって、従来においては、メモリに記憶された多数の信号が利用されないという問題があった。
【0008】
このような問題を解決して受信信号を有効に利用するためには、ロータリエンコーダのサンプリング信号出力分解能を向上させればよいが、高精度のロータリエンコーダは価格が高く、また塵埃、環境などに対して対抗力が少なく、屋外で用いられる埋設物探査装置には不適であり、必要なサンプリング信号の分解能を得ることができないという問題があった。
【課題を解決するための手段】
【0009】
以上のような問題を解決するために、本発明に係る埋設物探査装置は、埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、サンプリング信号を所定の分割距離に対応した補間サンプリング信号に変換する補間回路を有し、サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする。
【0010】
また、本発明に係る埋設物探査装置は、埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路を有し、サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする。
【発明の効果】
【0011】
本発明を用いることにより、受信データバッファメモリに取り込まれた受信信号の有効利用が可能となり、埋設体映像の分解能を向上することができるという効果がある。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態(以下実施形態という)を、図面に従って説明する。
【0013】
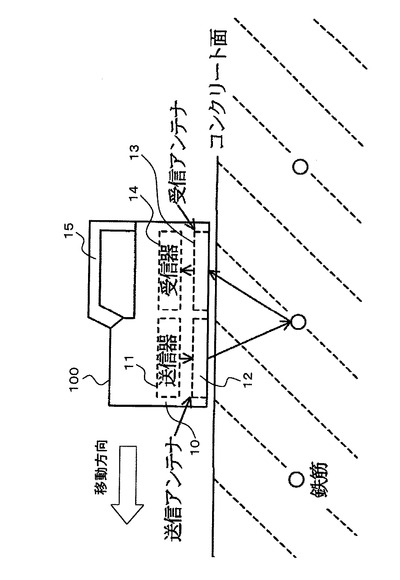
図1は埋設物探査装置100による埋設物探査の概要を示している。埋設物探査装置100は、例えばコンクリート面を移動する台車10と、台車10に搭載された送信器11の送信信号に基づき探査用電磁波をコンクリート構造体に放射する送信アンテナ12と、例えば鉄筋などの埋設物からの反射波を受信アンテナ13を介して受信する受信器14と、を含んでいる。埋設物探査装置100は受信信号に基づきコンクリート構造体内部を埋設体映像として表示し、所定の距離間隔毎の埋設体映像から鉄筋などの埋設物を探査する装置である。
【0014】
コンクリート構造体の探査を行う操作者は、装置100に設けられたハンドル15を握り、装置100を手で移動させることで、探査したいコンクリート構造物の床面や壁面などのコンクリート構造体の内部を自由に調べることができる。
【0015】
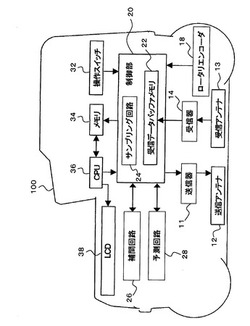
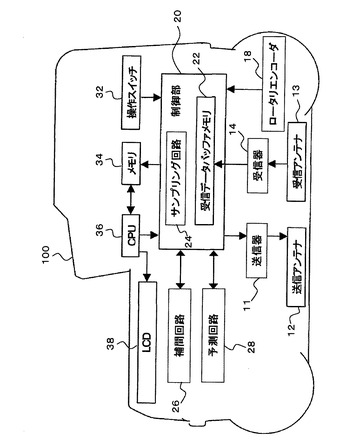
図2には、埋設物探査装置100の全体構成が示されている。埋設物探査装置100は探査用電磁波の送受に係る構成機器として、送信器11と、送信アンテナ12と、受信アンテナ13と、受信器14と、を含んでいる。
【0016】
また、埋設物探査装置100は、受信器14が取得した受信信号を記憶する受信データバッファメモリ22と、装置100の移動量を検出するロータリエンコーダ18と、ロータリエンコーダ18で検出したサンプリング信号を受信データバッファメモリ22に供給して、当該位置における受信信号を取り込むサンプリング回路24と、を含む。更に、本発明において特徴的なことは、装置100がサンプリング信号から補間サンプリング信号を形成する補間回路26と、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路28と、のいずれかを有することである。
【0017】
さらに、埋設物探査装置100は、装置全体の制御と埋設体映像の表示を司る、CPU36と、スクリーン(LCD)38と、メモリ34と、操作スイッチ32と、を有している。
【0018】
ロータリエンコーダ18は、埋設物探査装置100のタイヤ車軸に放射状のスリット加工を施した円盤を固定し、フォトカプラにて装置100が5mm移動する毎にスリットがフォトカプラの光を遮ることにより距離検出パルスを発生し、このパルスに基づいてサンプリング回路24のサンプリング信号が作られる。
【0019】
埋設物探査(以下、測定処理と略す)において、装置100は測定処理中10ms毎に反射波を取り込み受信信号を受信データバッファメモリ22に格納する。
【0020】
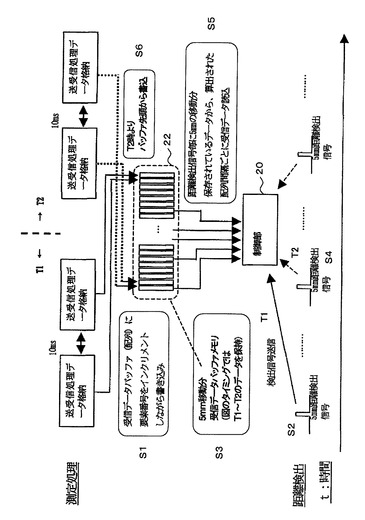
図3は補間回路の処理の概要を示し、図4は補間処理におけるデータ取得タイミングを示す。以下、図3と図4を用いて説明する。図3に示す補間回路は、装置が5mm移動する毎に出力される距離検出パルス列の間隔を送受信処理間隔である10msのパルスでカウントする。例えば装置の最低移動速度を0.8mm/sとすると、装置が5mm移動するために6秒かかり、6秒の間に10msのデータは600個格納されることになる。図3における受信データバッファメモリ22は、600個の受信バッファ容量(D[1]〜D[600]の配列)を有する。
【0021】
図3に、埋設物探査装置100が最低移動速度0.8mm/sで移動している時の測定処理の流れを示す。最初に、装置100が移動して距離検出パルスT1が出力されると(S2)、受信データバッファ(配列)に配列番号をインクリメントしながら送受信処理データの格納が10ms毎に実行される(S1)。6秒後に装置が5mm移動し、距離検出パルスT2が出力される(S4)。すると、補間回路は、T1からT2までの間に600個保存されているデータから、1mmごとの配列番号として算出された配列間隔ごとに受信信号読み込みを行う(S5)。
【0022】
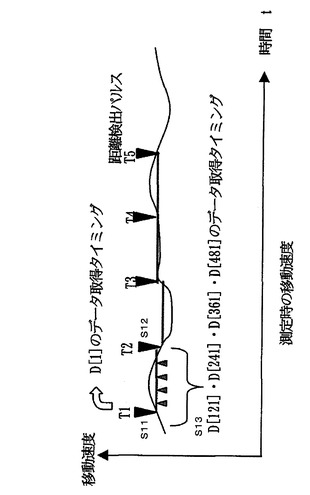
図4に示すようにデータ取得タイミングは、T1(S11)〜T2(S12)の速度変化を1mm単位の距離検出として処理をするために、D[1]と、D[1+(600/5)]と、D[1+2×(600/5)]と、D[1+3×(600/5)]と、D[1+4・(600/5)]と、であり、D[1]=(T1でのデータ)と、D[121]と、D[241]と、D[361]と、D[481]と、が採用される(S13)。
【0023】
最後に、図3に示すようにT2検出後のリセット処理を行った後、T2時より再びバッファ先頭からの書込が実行される(S6)。以上のような処理を行うことで、移動距離分解能を向上して、多数の受信信号を用いた詳細な埋設物映像の作成が可能となる。
【0024】
図5は本発明に係る予測回路の処理の概要を示し、図6は予測処理におけるデータ取得タイミングを示す。補間回路では、移動距離5mmの間のデータをすべて保存していたが、過去の速度データを用いることで、次の5mm間隔の移動速度を一定と仮定して1mmに相当する距離検出信号を予測して制御部に送信し、この予測タイミング信号を用いて受信信号の読み込みを行う。
【0025】
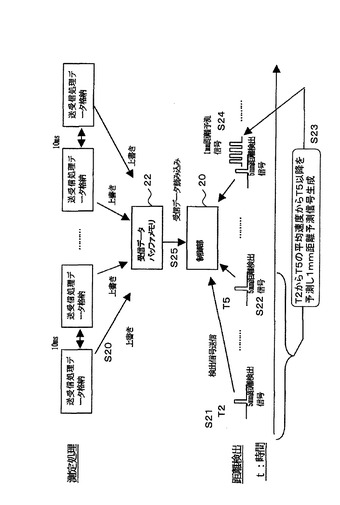
次に、予測回路の処理の概要を図5を用いて示す。最初に送受信処理データ格納が10msの間隔で受信データバッファメモリ22に上書きされる(S20)。次に、T2〜T3,T3〜T4,T4〜T5の3測定領域を参照領域とし(S21〜S22)、平均速度を算出し(S23)、参照領域の平均移動速度を元にした予測速度を用いて、距離検出パルスを生成し(S24)、その信号に基づき受信信号の読み込みを行う(S25)。
【0026】
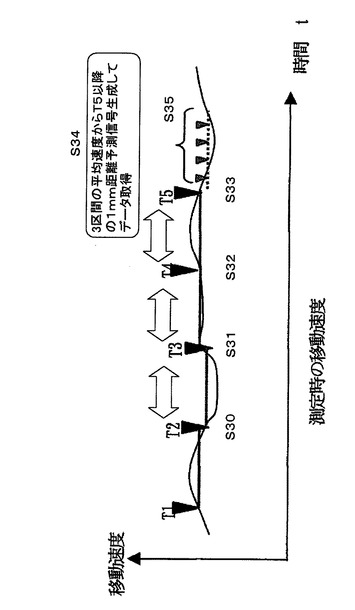
図6には予測回路のタイミング図が示されている。S30〜S33までの3区間の平均速度からT5以降の1mm距離予測信号を生成(S34)してデータを取得する(S35)。このような予測回路を用いることで、メモリの増設なしに距離分解能を向上してサンプリング信号を増加させることが可能となる。
【0027】
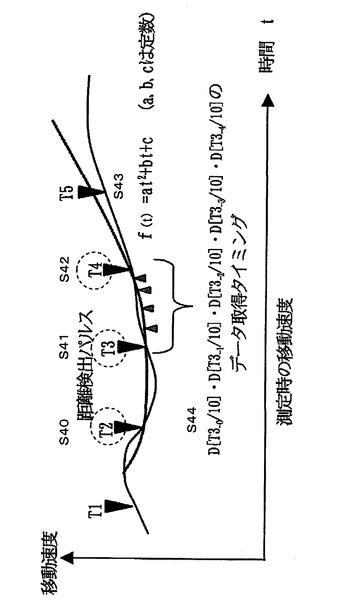
図7は、二次関数近似を用いた補間回路におけるデータ取得タイミングを示す。この方式も補間回路であるため、移動距離5mmの間のデータを全て保存しておき、また、直前5mmの移動時間T2,T3を送受信処理の10msを用いて測定し、保持しておく。二次関数Lb=f(t)として移動速度を類推することにより、一次関数で近似する場合より精度の高い分解能が得られる。
【0028】
例としてT3〜T4間の受信データの処理を示す。T3時点で移動距離をLとし、f(t)=at^2+bt+cと想定すると、前後10mm間の移動距離は次の式となる。L−10=a(T2)^2+b(T2)+c,L=a(T3)^2+b(T3)+c,L+10=a(T4)^2+b(T4)+c,が成り立ち、定数a・b・cを特定することができる。
【0029】
すると、T3の測定点から1mmずつ移動した時間は、T3[0]=f’(L),T3[1]=f’(L+1),T3[2]=f’(L+2),T3[3]=f’(L+3),T3[4]=f’(L+4)として求まる。
【0030】
前後10mm間の移動時間による二次関数近似により、D[T3(0)/10],D[T3(1)/10],D[T3(2)/10],D[T3(3)/10],D[T3(4)/10](T3(0)〜T3(4)の単位はmsとなる)の受信データを上述した受信データバッファメモリから読み込むことが可能となる。このような二次関数近似を用いた補間回路とすることにより区間の等分に比べてより精度の高い分解能が得られる。また、3次・4次と関数の次数を上げることや補間関数を他の関数に置き換えることによりさらに精度向上が望めることはいうまでもない。
【図面の簡単な説明】
【0031】
【図1】埋設物探査装置の概要を説明する説明図である。
【図2】本発明の実施形態に係る埋設物探査装置の全体構成図である。
【図3】本発明の実施形態に係る補間回路の処理概要を示す説明図である。
【図4】補間回路の処理のタイミングを示すタイミング図である。
【図5】本発明の実施形態に係る予測回路の処理概要を示す説明図である。
【図6】予測回路の処理のタイミングを示すタイミング図である。
【図7】二次関数近似補間回路の処理のタイミングを示すタイミング図である。
【符号の説明】
【0032】
10 台車、11 送信器、12 送信アンテナ、13 受信アンテナ、14 受信器、18 ロータリエンコーダ、20 制御部、22 受信データバッファメモリ、24 サンプリング回路、26 補間回路、28 予測回路、32 操作スイッチ、34 メモリ、36 CPU、38 スクリーン、100 埋設物探査装置。
【技術分野】
【0001】
本発明は、埋設面を移動しながら埋設体にある埋設物を探査する埋設物探査装置に関する。
【背景技術】
【0002】
近年、地表を移動しながら電磁波を用いて埋設物を探査する技術が利用されるようになった。この技術を用いると、地面を掘り起こすことなく地中埋設物を発見でき、また、地中の埋設物探査に限らずコンクリート構造物の鉄筋などを発見することも可能である。
【0003】
このような埋設物探査装置は、電磁波を送信アンテナから埋設体例えばコンクリート構造物に向けて放射し、その電磁波がコンクリートと電気的性質の異なる鉄筋や空洞などの反射物体との境界面で反射され、受信アンテナに到達するまでの伝搬時間から反射物体までの距離を求め、装置がコンクリート表面を移動することにより所望の埋設体映像を得ることができる。
【0004】
埋設体映像を得る目的で使用する場合、埋設物探査装置の移動量を正確に測定することが必要となる。特許文献1には、埋設物探査装置の移動に伴い左右輪に取りつけられたロータリエンコーダとツインエンコーダ回路を介してコントローラに正確な移動量を供給する構成が示されている。
【0005】
【特許文献1】特開平5−196729号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の埋設物探査装置においては、装置が地表あるいは埋設面を移動しながら前述した反射信号を受信して埋設体中の画像を形成する。このときの画像サンプリングは、装置の所定移動量ごとに出力されるサンプリング信号により行われる。このために、装置の車輪には前述したようにロータリエンコーダが取り付けられ、例えば5mmの移動間隔でサンプリング信号が出力され、これによって移動方向の分解能が定まる。
【0007】
受信アンテナによって取り込まれる受信信号は、一旦受信データバッファメモリに記憶されるが、この記憶された受信信号は全部が画像形成に用いられることなく、サンプリング信号の出力タイミングでのみ画像形成用の受信信号が抽出される。したがって、従来においては、メモリに記憶された多数の信号が利用されないという問題があった。
【0008】
このような問題を解決して受信信号を有効に利用するためには、ロータリエンコーダのサンプリング信号出力分解能を向上させればよいが、高精度のロータリエンコーダは価格が高く、また塵埃、環境などに対して対抗力が少なく、屋外で用いられる埋設物探査装置には不適であり、必要なサンプリング信号の分解能を得ることができないという問題があった。
【課題を解決するための手段】
【0009】
以上のような問題を解決するために、本発明に係る埋設物探査装置は、埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、サンプリング信号を所定の分割距離に対応した補間サンプリング信号に変換する補間回路を有し、サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする。
【0010】
また、本発明に係る埋設物探査装置は、埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路を有し、サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする。
【発明の効果】
【0011】
本発明を用いることにより、受信データバッファメモリに取り込まれた受信信号の有効利用が可能となり、埋設体映像の分解能を向上することができるという効果がある。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態(以下実施形態という)を、図面に従って説明する。
【0013】
図1は埋設物探査装置100による埋設物探査の概要を示している。埋設物探査装置100は、例えばコンクリート面を移動する台車10と、台車10に搭載された送信器11の送信信号に基づき探査用電磁波をコンクリート構造体に放射する送信アンテナ12と、例えば鉄筋などの埋設物からの反射波を受信アンテナ13を介して受信する受信器14と、を含んでいる。埋設物探査装置100は受信信号に基づきコンクリート構造体内部を埋設体映像として表示し、所定の距離間隔毎の埋設体映像から鉄筋などの埋設物を探査する装置である。
【0014】
コンクリート構造体の探査を行う操作者は、装置100に設けられたハンドル15を握り、装置100を手で移動させることで、探査したいコンクリート構造物の床面や壁面などのコンクリート構造体の内部を自由に調べることができる。
【0015】
図2には、埋設物探査装置100の全体構成が示されている。埋設物探査装置100は探査用電磁波の送受に係る構成機器として、送信器11と、送信アンテナ12と、受信アンテナ13と、受信器14と、を含んでいる。
【0016】
また、埋設物探査装置100は、受信器14が取得した受信信号を記憶する受信データバッファメモリ22と、装置100の移動量を検出するロータリエンコーダ18と、ロータリエンコーダ18で検出したサンプリング信号を受信データバッファメモリ22に供給して、当該位置における受信信号を取り込むサンプリング回路24と、を含む。更に、本発明において特徴的なことは、装置100がサンプリング信号から補間サンプリング信号を形成する補間回路26と、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路28と、のいずれかを有することである。
【0017】
さらに、埋設物探査装置100は、装置全体の制御と埋設体映像の表示を司る、CPU36と、スクリーン(LCD)38と、メモリ34と、操作スイッチ32と、を有している。
【0018】
ロータリエンコーダ18は、埋設物探査装置100のタイヤ車軸に放射状のスリット加工を施した円盤を固定し、フォトカプラにて装置100が5mm移動する毎にスリットがフォトカプラの光を遮ることにより距離検出パルスを発生し、このパルスに基づいてサンプリング回路24のサンプリング信号が作られる。
【0019】
埋設物探査(以下、測定処理と略す)において、装置100は測定処理中10ms毎に反射波を取り込み受信信号を受信データバッファメモリ22に格納する。
【0020】
図3は補間回路の処理の概要を示し、図4は補間処理におけるデータ取得タイミングを示す。以下、図3と図4を用いて説明する。図3に示す補間回路は、装置が5mm移動する毎に出力される距離検出パルス列の間隔を送受信処理間隔である10msのパルスでカウントする。例えば装置の最低移動速度を0.8mm/sとすると、装置が5mm移動するために6秒かかり、6秒の間に10msのデータは600個格納されることになる。図3における受信データバッファメモリ22は、600個の受信バッファ容量(D[1]〜D[600]の配列)を有する。
【0021】
図3に、埋設物探査装置100が最低移動速度0.8mm/sで移動している時の測定処理の流れを示す。最初に、装置100が移動して距離検出パルスT1が出力されると(S2)、受信データバッファ(配列)に配列番号をインクリメントしながら送受信処理データの格納が10ms毎に実行される(S1)。6秒後に装置が5mm移動し、距離検出パルスT2が出力される(S4)。すると、補間回路は、T1からT2までの間に600個保存されているデータから、1mmごとの配列番号として算出された配列間隔ごとに受信信号読み込みを行う(S5)。
【0022】
図4に示すようにデータ取得タイミングは、T1(S11)〜T2(S12)の速度変化を1mm単位の距離検出として処理をするために、D[1]と、D[1+(600/5)]と、D[1+2×(600/5)]と、D[1+3×(600/5)]と、D[1+4・(600/5)]と、であり、D[1]=(T1でのデータ)と、D[121]と、D[241]と、D[361]と、D[481]と、が採用される(S13)。
【0023】
最後に、図3に示すようにT2検出後のリセット処理を行った後、T2時より再びバッファ先頭からの書込が実行される(S6)。以上のような処理を行うことで、移動距離分解能を向上して、多数の受信信号を用いた詳細な埋設物映像の作成が可能となる。
【0024】
図5は本発明に係る予測回路の処理の概要を示し、図6は予測処理におけるデータ取得タイミングを示す。補間回路では、移動距離5mmの間のデータをすべて保存していたが、過去の速度データを用いることで、次の5mm間隔の移動速度を一定と仮定して1mmに相当する距離検出信号を予測して制御部に送信し、この予測タイミング信号を用いて受信信号の読み込みを行う。
【0025】
次に、予測回路の処理の概要を図5を用いて示す。最初に送受信処理データ格納が10msの間隔で受信データバッファメモリ22に上書きされる(S20)。次に、T2〜T3,T3〜T4,T4〜T5の3測定領域を参照領域とし(S21〜S22)、平均速度を算出し(S23)、参照領域の平均移動速度を元にした予測速度を用いて、距離検出パルスを生成し(S24)、その信号に基づき受信信号の読み込みを行う(S25)。
【0026】
図6には予測回路のタイミング図が示されている。S30〜S33までの3区間の平均速度からT5以降の1mm距離予測信号を生成(S34)してデータを取得する(S35)。このような予測回路を用いることで、メモリの増設なしに距離分解能を向上してサンプリング信号を増加させることが可能となる。
【0027】
図7は、二次関数近似を用いた補間回路におけるデータ取得タイミングを示す。この方式も補間回路であるため、移動距離5mmの間のデータを全て保存しておき、また、直前5mmの移動時間T2,T3を送受信処理の10msを用いて測定し、保持しておく。二次関数Lb=f(t)として移動速度を類推することにより、一次関数で近似する場合より精度の高い分解能が得られる。
【0028】
例としてT3〜T4間の受信データの処理を示す。T3時点で移動距離をLとし、f(t)=at^2+bt+cと想定すると、前後10mm間の移動距離は次の式となる。L−10=a(T2)^2+b(T2)+c,L=a(T3)^2+b(T3)+c,L+10=a(T4)^2+b(T4)+c,が成り立ち、定数a・b・cを特定することができる。
【0029】
すると、T3の測定点から1mmずつ移動した時間は、T3[0]=f’(L),T3[1]=f’(L+1),T3[2]=f’(L+2),T3[3]=f’(L+3),T3[4]=f’(L+4)として求まる。
【0030】
前後10mm間の移動時間による二次関数近似により、D[T3(0)/10],D[T3(1)/10],D[T3(2)/10],D[T3(3)/10],D[T3(4)/10](T3(0)〜T3(4)の単位はmsとなる)の受信データを上述した受信データバッファメモリから読み込むことが可能となる。このような二次関数近似を用いた補間回路とすることにより区間の等分に比べてより精度の高い分解能が得られる。また、3次・4次と関数の次数を上げることや補間関数を他の関数に置き換えることによりさらに精度向上が望めることはいうまでもない。
【図面の簡単な説明】
【0031】
【図1】埋設物探査装置の概要を説明する説明図である。
【図2】本発明の実施形態に係る埋設物探査装置の全体構成図である。
【図3】本発明の実施形態に係る補間回路の処理概要を示す説明図である。
【図4】補間回路の処理のタイミングを示すタイミング図である。
【図5】本発明の実施形態に係る予測回路の処理概要を示す説明図である。
【図6】予測回路の処理のタイミングを示すタイミング図である。
【図7】二次関数近似補間回路の処理のタイミングを示すタイミング図である。
【符号の説明】
【0032】
10 台車、11 送信器、12 送信アンテナ、13 受信アンテナ、14 受信器、18 ロータリエンコーダ、20 制御部、22 受信データバッファメモリ、24 サンプリング回路、26 補間回路、28 予測回路、32 操作スイッチ、34 メモリ、36 CPU、38 スクリーン、100 埋設物探査装置。
【特許請求の範囲】
【請求項1】
埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、
サンプリング信号を所定の分割距離に対応した補間サンプリング信号に変換する補間回路を有し、
サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする埋設物探査装置。
【請求項2】
埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、
サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路を有し、
サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする埋設物探査装置。
【請求項1】
埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、
サンプリング信号を所定の分割距離に対応した補間サンプリング信号に変換する補間回路を有し、
サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする埋設物探査装置。
【請求項2】
埋設面を移動する台車と、台車に搭載され送信器の送信信号に基づき埋設体に探査用電磁波を放射する送信アンテナと、台車に搭載され埋設物からの反射波を受信アンテナを介して受信する受信器と、受信器の受信信号を記憶するメモリと、台車の一定移動距離毎にサンプリング信号をメモリに供給して、当該位置における受信信号を取り込むサンプリング回路と、受信信号に基づき、埋設体映像を表示するスクリーンと、を含み、所定の距離間隔毎の埋設体映像から埋設物を探査する埋設物探査装置において、
サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路を有し、
サンプリング信号及び補間サンプリング信号によりメモリに記憶された受信信号を取り込むことを特徴とする埋設物探査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−263694(P2007−263694A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−88164(P2006−88164)
【出願日】平成18年3月28日(2006.3.28)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月28日(2006.3.28)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]