
基地局装置及び無線通信方法
【課題】ハンドオーバ処理に要する時間を短縮し、ハンドオーバ成功確率を向上させ、さらに、ハンドオーバ処理にかかる基地局装置の処理負荷を低減する基地局装置及び無線通信方法を提供する。
【解決手段】電車または高速道路上のクルマで移動するなど、UEの移動経路が予測できる環境において、UEの移動先セルを予測し、移動元セルにHOが完了した時点で予測移動先セルのリソースを確保する。UEが予測移動先セルへのHO可能エリアに到達すると、確保済みのリソースを用いたHOを実行する。
【解決手段】電車または高速道路上のクルマで移動するなど、UEの移動経路が予測できる環境において、UEの移動先セルを予測し、移動元セルにHOが完了した時点で予測移動先セルのリソースを確保する。UEが予測移動先セルへのHO可能エリアに到達すると、確保済みのリソースを用いたHOを実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハンドオーバ処理を行う基地局装置及び無線通信方法に関する。
【背景技術】
【0002】
無線通信端末(以下、「UE(User Equipment)」という)は、通信を継続したままセル間を移動する際、ハンドオーバ(以下、「HO(Handover)」と省略する)と呼ばれる制御を行う必要がある。HOは、大きく次の(1)〜(3)の3つフェーズからなる。(1)UEから無線通信基地局(以下、「eNB(E-UTRAN NodeB)」という)へのHO測定報告(UEでの測定がHO開始条件を満たした時に実施)、(2)移動先セルのeNBでのリソース確保、(3)UEが無線通信を移動元セルから移動先セルへ切り替え、の3つのフェーズである。
【0003】
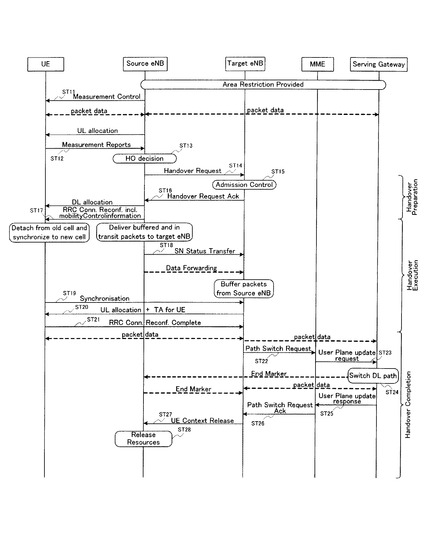
HO制御手順は、非特許文献1に開示されており、これについて図1を用いて具体的に説明する。図1において、ステップ(以下、「ST」と省略する)11では、移動元セルのeNB(Source eNB)は、UEがHO実行を判断するための自セル及び隣接セルの測定を指示(Measurement Control)し、ST12では、UEは、指示に基づいて受信電力または受信品質の測定を行い、移動元セルのeNBから指定される条件を満たすと、移動元セルのeNBに測定報告(Measurement Reports)を行う。
【0004】
ST13において、移動元セルのeNBがHOを決定すると、ST14〜ST17では、移動先セルのeNB(Target eNB)に対してリソース予約(Handover Request)を行い、リソース予約が完了すると、移動元セルのeNBは、UEに移動先セルへ無線リンクを切り替えるよう指示する。
【0005】
ST18において、移動先セルのeNBで送信データの順序性を確保する必要がある場合、移動元セルのeNBは、送信が完了しているデータの送信順序を示す情報を移動先セルのeNBに通知する。
【0006】
ST19〜ST21では、UEが、移動先セルの無線リンクを切り替える。
【0007】
ST22〜ST26では、移動先セルのeNBは、MMEに移動先セルのeNBへの経路切り替えを要求し、経路の変更が完了すると、ST27において、移動先セルのeNBは、移動元セルのeNBに、UEコンテキストの解放を指示する。ST28では、移動元セルのeNBはUEコンテキストを解放する。
【0008】
ところで、UEの移動速度が速いほど、HO可能エリアを通過する時間は早くなるため、HO処理に許容される時間は短くなる。特に、新幹線のように高速で移動する電車では、その要求はさらに厳しくなる。そのため、UEの移動速度が速いほど、許容される時間内でHO処理が完了せず、無線リンク断が発生する可能性が高くなる。
【0009】
この問題に対して、従来、UEの移動速度が速くなるほど、UEの測定報告の送信タイミングを早くするようパラメータ設定を行い、HOを早く開始するようにしていた。これについて、以下、図2を用いて具体的に説明する。
【0010】
UEでは、自セル及び隣接セルの受信電力(RSRP: Reference Signal Received Power)または受信品質(RSRQ: Reference Signal Received Quality)を測定する。自セル及び隣接セルにおける測定値の差(α+Hysteresis:αはセル固有のオフセット値)が、eNBから指定された値(entering condition)になると、UEはTTT(Time To Trigger)タイマを起動する。TTTタイマが満了すると、UEはeNBに測定報告を送信する。このTTTタイマのタイマ値に、UEの移動速度に応じた係数を乗算することにより、eNBへの測定報告の送信タイミングを調整することができる。
【0011】
UEの移動速度に応じた係数は、UEの移動速度を高速(High)、中速(Medium)、低速(Slow)の3段階に分類した場合、高速の場合には係数sf-High、中速の場合には係数sf-Medium(sf-High<sf-Medium<0)とする。各場合に応じた係数をTTTに乗算することにより、UEの測定報告の送信タイミングを調整する。
【0012】
なお、UEの移動速度の判定は、一定時間内に発生するセル間移動の回数によって判断する。すなわち、一定時間におけるセル間移動の回数が多いほど、移動速度が速く、少ないほど、移動速度が遅いと判断する。このように、一定時間内のセル間移動の回数に基づいて、UEの移動速度を高速、中速、低速のいずれかに判定する。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】3GPP, TS36.300 V10.4.0 "3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal Terrestrial Radio Access Network (E-UTRAN); Overall description; Stage 2 (Release 10)"
【発明の概要】
【発明が解決しようとする課題】
【0014】
しかしながら、上述した非特許文献1に開示の技術では、UEの移動速度に応じてHO開始タイミングを早くしても、HO処理そのものに要する時間は変わらないため、UEが高速でHO可能エリアを通過する場合、依然としてHOが完了しない可能性がある。
【0015】
また、UEが一定時間内でセル間を移動する回数とUEの移動速度との関係は必ずしも一致しない。例えば、図3(a)では、大きなセルを高速で移動するUEを示しているが、セル間の移動回数は少ないので、UEの移動速度は実際より遅い速度として判定される。また、図3(b)では、小さい複数のセルを低速で移動するUEを示しており、図3(c)では、2つのセル間を低速で往復するUEを示している。これらはセル間の移動回数が多いので、UEの移動速度は実際より速い速度として判定される。このように、UEの移動速度を誤って判定すると、誤った測定報告タイミングが設定され、UEの移動速度に応じたHO処理を行うことができない。
【0016】
さらに、多数のユーザを乗せた電車が移動することを想定した場合、多くのUEが同時にHOを行うことになり、HOのためのシグナリングが一斉に発生するため、移動元セル及び移動先セルのeNBにおける処理負荷(オーバーロード)が発生する。この結果、HOが遅延する可能性がある。また、最悪の場合、HOが失敗することが考えられ、このとき、UEは移動先セルで再接続を行うが、無線リンク断の時間が長くなるため、サービス品質が劣化してしまう。
【0017】
本発明の目的は、ハンドオーバ処理に要する時間を短縮し、ハンドオーバ成功確率を向上させ、さらに、ハンドオーバ処理にかかる基地局装置の処理負荷を低減する基地局装置及び無線通信方法を提供することである。
【課題を解決するための手段】
【0018】
本発明の基地局装置は、ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定手段と、前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を指示する予測移動先セルリソース取得指示手段と、確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御手段と、を具備する構成を採る。
【0019】
本発明の無線通信方法は、ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定工程と、前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を移動元の基地局装置から移動先の基地局装置に指示する予測移動先セルリソース取得指示工程と、確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御工程と、を具備するようにした。
【発明の効果】
【0020】
本発明によれば、ハンドオーバ処理に要する時間を短縮し、ハンドオーバ成功確率を向上させ、さらに、ハンドオーバ処理にかかる基地局装置の処理負荷を低減することができる。
【図面の簡単な説明】
【0021】
【図1】非特許文献1に開示されたHO制御手順を示すシーケンス図
【図2】UEの移動速度に応じたHO開始タイミングの調整の説明に供する図
【図3】UEの移動速度判定の説明に供する図
【図4】本発明の一実施の形態に係る基地局の構成を示すブロック図
【図5】予測移動先セルの予測方法の説明に供する図
【図6】図4に示した基地局を用いたHO制御手順を示すシーケンス図
【図7】HOに要する時間を従来方式と比較した様子を示す図
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0023】
(一実施の形態)
本実施の形態では、UEが、例えば、電車(新幹線を含む)で移動したり、高速道路をクルマで移動したりするなど、UEの移動経路が予測できる環境において、HOを行う移動先セル(以下、「予測移動先セル」という)を予測することを前提とし、電車または高速道路上のクルマでUEを利用することをユーザが事前に登録するものとする。登録情報は、管理サーバ等で保持され、ユーザが利用する電車または高速道路に関連する基地局に通知される。基地局では、通知された登録情報に該当するUEを予測可能な経路を移動するUEとして処理する。
【0024】
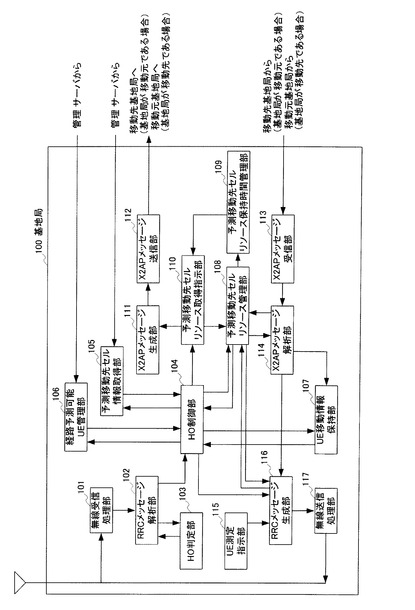
図4は、本発明の一実施の形態に係る基地局100の構成を示すブロック図である。以下、基地局の構成について図4を用いて説明する。
【0025】
無線受信処理部101は、UEからの無線信号を受信し、受信した無線信号に所定の無線受信処理を施す。無線受信処理が施された信号はRRCメッセージ解析部102に出力される。
【0026】
RRCメッセージ解析部102は、無線受信処理部101から出力された信号のうち、RRCメッセージの解析を行い、解析したRRCメッセージが測定報告(Measurement Reports)であった場合、測定報告をHO判定部103に出力すると共に、HOを実行するか否かを問い合わせる。RRCメッセージ解析部102は、HOを実行する場合は、HO制御部104にHO実行を指示し、HOを行わない場合は、HO制御部104への指示は行わない。また、解析したRRCメッセージがRRC Conn. Reconf. Complete(HO完了)である場合、RRCメッセージ解析部102は、HO制御部104にUEの移動先である予測移動先セルのリソース確保を指示する。
【0027】
HO判定部103は、RRCメッセージ解析部102から出力されたUEの測定報告に基づいて、HO実行の可否を判定し、判定結果をRRCメッセージ解析部102に出力する。
【0028】
HO制御部104は、RRCメッセージ解析部102から予測移動先セルのリソース確保の指示を受けると、経路予測可能UE管理部106に対して、UEが予測可能な経路移動を行うUEであるかを問い合わせ、経路予測不可の場合には、以降の処理を停止する。一方、経路予測可能な場合には、HO制御部104は、UE移動情報保持部107に対して、そのUEが以前在圏したセルを問い合わせる。
【0029】
また、HO制御部104は、予測移動先セル情報取得部105に対して、UEが以前在圏したセルの情報を通知し、予測移動先セル情報を問い合わせる。
【0030】
HO制御部104は、予測移動先セル情報を取得すると、予測移動先セルリソース管理部108に対して、そのUEの予測移動先セルのリソースがすでに確保されているか否かを確認する。確保されていない場合には、HO制御部104は、移動先セルリソース取得指示部110に対して、予測移動先セルのリソースを確保するよう指示し、確保されている場合には、特段の処理を行わない。なお、予測移動先セル情報取得部105から予測移動先セルなしの応答を受けた場合、HO制御部104は以降の処理を停止する。
【0031】
また、HO制御部104は、RRCメッセージ解析部102からHO実行の指示を受けると、予測移動先セルリソース管理部108に対して、そのUEの移動先セルのリソースがすでに確保されているか否かを確認し、確保されている場合には、UEにHO実行を指示するRRCメッセージの生成をRRCメッセージ生成部116に指示する。一方、確保されていない場合には、HO制御部104は、予測移動先セルリソース取得指示部110に対して、移動先セルのリソースを確保するよう指示する。
【0032】
予測移動先セル情報取得部105は、UEが以前在圏したセルから次に移動するセルを予測可能なデータベースを図示せぬ管理サーバから取得する。予測移動先セル情報取得部105は、HO制御部104から予測移動先セルの問い合わせを受けると、UEが以前在圏したセルから予測される移動先セルを管理サーバから取得したデータベースに基づいて検索し、検索された予測移動先セルを含む応答をHO制御部104に返す。データベースから予測移動先セルが検索されなかった場合、予測移動先セル情報取得部105は、予測移動先セルなしの応答をHO制御部104に返す。
【0033】
経路予測可能UE管理部106は、管理サーバから通知された、予測可能な経路移動を行うUEの識別子を保持し、UEが予測可能な経路移動を行うUEであるか否かの問い合わせをHO制御部104から受けると、保持するUEの識別子と一致するか否かを確認し、確認結果をHO制御部104に応答する。
【0034】
UE移動情報保持部107は、基地局100が移動先セルの基地局である場合、X2APメッセージ解析部114から通知された、新たにHOを行うUEの識別情報(C−RNTI)と当該UEの移動元セルの識別情報とを保持する。また、UE移動情報保持部107は、UEが以前在圏したセルの問い合わせをHO制御部104から受けると、UE識別情報から移動元セルの識別情報を応答する。
【0035】
予測移動先セルリソース管理部108は、予測移動先セルのリソース確保手順を実行中であることを予測移動先セルリソース取得指示部110から通知されると、そのUEの識別情報を保持する。また、予測移動先セルリソース管理部108は、HANDOVER REQUEST ACKNOWLEDGEメッセージを受信したことをX2APメッセージ解析部114から通知されると、HANDOVER REQUEST ACKNOWLEDGEメッセージに含まれるUEの識別情報と、保持するUEの識別情報とを比較する。これらの識別情報が一致する場合には、予測移動先セルリソース管理部108は、その予測移動先セルで確保したリソース管理情報を保持し、X2APメッセージ解析部114に一致したことを通知し、予測移動先セルリソース保持時間管理部109にタイマ起動を指示する。識別情報が一致しない場合には、予測移動先セルリソース管理部108は、X2APメッセージ解析部114に一致しないことを通知する。
【0036】
また、予測移動先セルリソース管理部108は、UEが予測移動先セルのリソースをすでに確保しているか否かの問い合わせをHO制御部104から受けると、保持している予測移動先セルのリソース管理情報を確認し、すでにリソースを確保している場合には、確保済みの応答を返し、まだ確保できていない場合には、未確保の応答を返す。
【0037】
さらに、予測移動先セルリソース管理部108は、予測移動先セルのリソース管理情報を削除するようX2APメッセージ解析部114から通知を受けた場合、そのUEの予測移動先セルのリソース管理情報を削除し、予測移動先セルリソース保持時間管理部109にタイマ停止を指示する。
【0038】
予測移動先セルリソース保持時間管理部109は、予測移動先セルリソース管理部108からタイマ起動の指示があった場合、該当するUEのために確保した予測移動先セルのリソース管理情報のタイマを起動する。タイマが満了した場合は、該当するUEの予測移動先セルのリソース解放を予測移動先セルリソース取得指示部110に指示する。予測移動先セルリソース管理部108からタイマ停止の指示があった場合、該当するUEに対応するタイマを停止する。
【0039】
予測移動先セルリソース取得指示部110は、予測移動先セルのリソースを確保する指示をHO制御部104から受けた場合、予測移動先セルでのリソースの確保を指示するメッセージの生成をX2APメッセージ生成部111に指示する。また、予測移動先セルリソース取得指示部110は、予測移動先セルリソース管理部108に対して、該当するUEのために予測移動先セルのリソース確保手順を実行中であることを通知する。
【0040】
予測移動先セルリソース取得指示部110は、予測移動先セルリソース保持時間管理部109から予測移動先セルのリソース解放の指示を受けると、予測移動先セルのリソース解放を指示するメッセージの送信をX2APメッセージ生成部111に指示する。
【0041】
予測移動先セルリソース取得指示部110は、移動先セルのリソースを確保する指示をHO制御部104から受けた場合、移動先セルでのリソースの確保を指示するメッセージの生成をX2APメッセージ生成部111に指示する。
【0042】
X2APメッセージ生成部111は、予測移動先セルまたは移動先セルでのリソース確保を指示するメッセージの生成を予測移動先セルリソース取得指示部110から指示された場合、予測移動先セルまたは移動先セル宛てのHO要求(HANDOVER REQUEST)メッセージを生成し、生成したメッセージをX2APメッセージ送信部112に出力する。また、X2APメッセージ生成部111は、予測移動先セルにおいて確保したリソースの解放を指示するメッセージの生成を予測移動先セルリソース取得指示部110から指示された場合、予測移動先セル宛てのHO中止(HANDOVER CANCEL)メッセージを生成し、生成したメッセージをX2APメッセージ送信部112に出力する。
【0043】
X2APメッセージ送信部112は、X2APメッセージ生成部111から出力されたメッセージの送信処理を行い、基地局100が移動元である場合には移動先基地局に、基地局100が移動先である場合には移動元基地局に、送信処理を行ったX2APメッセージを送信する。
【0044】
X2APメッセージ受信部113は、基地局100が移動元である場合には移動先基地局から、基地局100が移動先である場合には移動元基地局からX2APメッセージを受信し、受信したX2APメッセージをX2APメッセージ解析部114に出力する。
【0045】
X2APメッセージ解析部114は、HANDOVER REQUEST ACKNOWLEDGEメッセージがX2APメッセージ受信部113から出力された場合、UEの識別情報と予測移動先セルのリソース情報の管理を予測移動先セルリソース管理部108に指示する。X2APメッセージ解析部114は、予測移動先セルリソース管理部108から一致するUE識別情報があるとの応答を受けた場合、以降の処理を終了し、一致するUEの識別情報がないとの応答を受けた場合、UEにHOの開始を指示するメッセージの生成をRRCメッセージ生成部116に指示する。
【0046】
また、X2APメッセージ解析部114は、UEコンテキスト解放(UE CONTEXT RELEASE)メッセージがX2APメッセージ受信部113から出力された場合、該当するUEのための予測移動先セルのリソース管理情報の削除を予測移動先セルリソース管理部108に指示する。
【0047】
さらに、X2APメッセージ解析部114は、HO要求(HANDOVER REQUEST)メッセージがX2APメッセージ受信部113から出力された場合、基地局100は移動先セルの基地局であるので、新たにHOを行うUEの識別情報(C−RNTI)と移動元セルの識別情報とをUE移動情報保持部107に出力する。
【0048】
UE測定指示部115は、UEにおける測定の指示及びこの測定に必要な情報をRRCメッセージ生成部116に通知する。
【0049】
RRCメッセージ生成部116は、UE測定指示部115の指示に基づいて、測定制御(Measurement Control)メッセージを生成し、生成した測定制御メッセージを無線送信処理部117に出力する。また、RRCメッセージ生成部116は、UEにHO実行を指示するRRCメッセージの生成の指示をHO制御部104から受けた場合、予測移動先セルリソース管理部108から必要な情報を取得し、RRC Conn. Reconf incl. mobilityControlInfomationを生成して、無線送信処理部117に出力する。さらに、RRCメッセージ生成部116は、UEにHO実行を指示するRRCメッセージの生成がX2APメッセージ解析部114から指示された場合、RRC Conn. Reconf incl. mobilityControlInfomationを生成して、無線送信処理部117に出力する。
【0050】
無線送信処理部117は、RRCメッセージ生成部116から出力されたメッセージに所定の送信処理を施し、送信処理を施した信号をUEに送信する。
【0051】
ここで、予測移動先セルの予測方法について説明する。管理サーバには、例えば、図5(a)に示すような地図情報(鉄道路線など)とセル配置の関係が登録されている。図5(a)では、地図情報(鉄道路線)である路線X及び路線Yと、セル配置であるセルA〜セルVとの関係を示している。管理サーバは、この関係に基づいて、UEが以前在圏したセルから次に移動するセルをデータベースとして保有し、このデータベースを基地局に通知する。例えば、図5(a)において、路線Xと路線Yとが交差するセルIでは、UEが以前在圏したセルがセルHである場合、予測移動先セルはセルOとなり、UEが以前在圏したセルがセルOである場合、予測移動先セルはセルHとなる。同様に、UEが以前在圏したセルがセルNである場合、予測移動先セルはセルJとなり、UEが以前在圏したセルがセルJである場合、予測移動先セルはセルNとなる。これらの関係をまとめたものが図5(b)に示すデータベースであり、このデータベースがセルIの基地局に通知される。
【0052】
管理サーバを用いた上記の予測方法以外にも次のような方法が考えられる。UEが以前在圏したセルと次に移動したセルの情報を基地局が蓄積し、同一パターンのHOの回数が所定の閾値を超えた場合、データベースに登録する。図5(a)に示したセルIを例に挙げると、次のパターンによるHOが高頻度で観測される。すなわち、パターン1(セルH→セルI→セルO)、パターン2(セルO→セルI→セルH)、パターン3(セルN→セルI→セルJ)、パターン4(セルJ→セルI→セルN)の4つのパターンである。これらのパターンによるHO回数が所定の閾値を超えると、図5(b)に示すデータベースが作成される。
【0053】
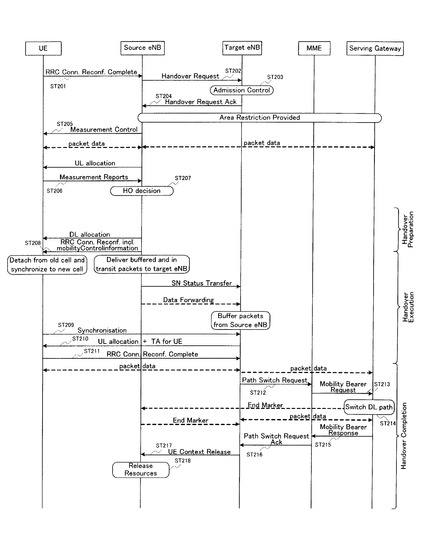
次に、図4に示した基地局を用いたHO制御手順について図6を参照して説明する。図6において、ST201〜ST204では、現在のセル(移動元セル)の基地局(Source eNB)へのHO完了(Source eNBでの RRC Conn. Reconf. Complete受信)を契機として、予測移動先セルのリソースを確保する。
【0054】
ST205では、移動元セルの基地局は、UEがHO実行を判断するための自セル及び隣接セルの測定を指示(Measurement Control)し、ST206では、UEは、指示に基づいて受信電力または受信品質の測定を行い、移動元セルの基地局から指定される条件を満たすと、移動元セルの基地局に測定報告(Measurement Report)を行う。
【0055】
ST207では、移動元セルの基地局は、UEから測定報告(measurement report)を受信し、HO実行を決定すると、ST208において、直ちにUEに対して移動先セルへ無線リンクの切り替えを指示する(RRC Conn. Reconf. Incl. mobilityControlinformation送信)。
【0056】
ST209〜ST211では、UEが、移動先セルへ無線リンクを切り替える。
【0057】
ST212〜ST217では、移動先セルの基地局(Target eNB)は、MMEに移動先セルの基地局への経路切り替えを要求し、経路の変更が完了すると、移動先セルの基地局は、移動元セルの基地局に、UEコンテキストの解放を指示する。ST218では、移動元セルの基地局はUEコンテキストを解放する。
【0058】
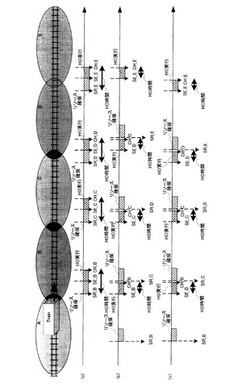
次に、HOに要する時間を従来方式と比較した様子を図7に示す。図7では、セルA〜セルEの方向へ電車で移動する場合を想定する。図7において、SR_X(X=B〜E)はセルXにおけるリソース確保開始タイミングを示し、SE_X(X=B〜E)はセルXにおけるHO実行開始タイミングを示し、CH_X(X=B〜E)はセルXへのHO完了タイミングを示している。
【0059】
図7(a)は、UEの移動速度に応じてHO開始タイミングを調整する従来のHOの様子を示す図である。図7(a)において、例えば、セルAからセルBへのHOについて見てみると、セルBのリソースを確保した後、HOが実行されており、トータルのHO時間はリソース確保開始タイミングからHO完了タイミングまでとなることが分かる。また、セル間移動の回数に基づくUEの移動速度判定により、セルAからセルBへのHOおよびセルBからセルCへのHOに比べて、セルCからセルDへのHOおよびセルDからセルEへのHOでのリソース確保開始タイミングが早まっていることが分かる。
【0060】
図7(b)は、本実施の形態に係るHOの様子を示す図であり、図7(c)は、UEの移動速度判定に応じてHOの開始タイミングを調整する本実施の形態に係るHOの様子を示す図である。
【0061】
図7(b)及び図7(c)において、例えば、セルAからセルBへのHOについて見てみると、セルBのリソースはすでに確保されているため、セルBへ移動したUEは直ちにHOの実行を開始することができる。UEはセルBへのHOが完了すると、移動先セルCのリソースを確保する。なお、図7(c)では、図7(a)と同様、セル間移動の回数に基づくUEの移動速度判定により、セルAからセルBへのHOおよびセルBからセルCへのHOに比べて、セルCからセルDへのHOおよびセルDからセルEへのHOでのリソース確保開始タイミングが早まっている。
【0062】
このように、移動元セルにHOが完了した時点で移動先セルのリソースを確保することにより、移動先セルへのHOに要する時間を短縮することができる。
【0063】
以上、説明したように、本実施の形態によれば、UEの移動経路が予測できる環境において、UEの移動先のセルを予測し、移動元セルにHOが完了した時点で予測移動先セルのリソースを確保することにより、移動先セルへのHOに要する時間を短縮することができ、HO可能エリア内でHOが完了する可能性が高くなるので、HO成功確率を向上させることができる。さらに、移動先セルのリソース確保のシグナリングがHO実行時以外に行われるため、HO処理にかかる基地局の処理負荷を低減することができる。
【産業上の利用可能性】
【0064】
本発明にかかる基地局装置及び無線通信方法は、移動通信システム等に適用できる。
【符号の説明】
【0065】
101 無線受信処理部
102 RRCメッセージ解析部
103 HO判定部
104 HO制御部
105 予測移動先セル情報取得部
106 経路予測可能UE管理部
107 UE移動情報保持部
108 予測移動先セルリソース管理部
109 予測移動先セルリソース保持時間管理部
110 予測移動先セルリソース取得指示部
111 X2APメッセージ生成部
112 X2APメッセージ送信部
113 X2APメッセージ受信部
114 X2APメッセージ解析部
115 UE測定指示部
116 RRCメッセージ生成部
117 無線送信処理部
【技術分野】
【0001】
本発明は、ハンドオーバ処理を行う基地局装置及び無線通信方法に関する。
【背景技術】
【0002】
無線通信端末(以下、「UE(User Equipment)」という)は、通信を継続したままセル間を移動する際、ハンドオーバ(以下、「HO(Handover)」と省略する)と呼ばれる制御を行う必要がある。HOは、大きく次の(1)〜(3)の3つフェーズからなる。(1)UEから無線通信基地局(以下、「eNB(E-UTRAN NodeB)」という)へのHO測定報告(UEでの測定がHO開始条件を満たした時に実施)、(2)移動先セルのeNBでのリソース確保、(3)UEが無線通信を移動元セルから移動先セルへ切り替え、の3つのフェーズである。
【0003】
HO制御手順は、非特許文献1に開示されており、これについて図1を用いて具体的に説明する。図1において、ステップ(以下、「ST」と省略する)11では、移動元セルのeNB(Source eNB)は、UEがHO実行を判断するための自セル及び隣接セルの測定を指示(Measurement Control)し、ST12では、UEは、指示に基づいて受信電力または受信品質の測定を行い、移動元セルのeNBから指定される条件を満たすと、移動元セルのeNBに測定報告(Measurement Reports)を行う。
【0004】
ST13において、移動元セルのeNBがHOを決定すると、ST14〜ST17では、移動先セルのeNB(Target eNB)に対してリソース予約(Handover Request)を行い、リソース予約が完了すると、移動元セルのeNBは、UEに移動先セルへ無線リンクを切り替えるよう指示する。
【0005】
ST18において、移動先セルのeNBで送信データの順序性を確保する必要がある場合、移動元セルのeNBは、送信が完了しているデータの送信順序を示す情報を移動先セルのeNBに通知する。
【0006】
ST19〜ST21では、UEが、移動先セルの無線リンクを切り替える。
【0007】
ST22〜ST26では、移動先セルのeNBは、MMEに移動先セルのeNBへの経路切り替えを要求し、経路の変更が完了すると、ST27において、移動先セルのeNBは、移動元セルのeNBに、UEコンテキストの解放を指示する。ST28では、移動元セルのeNBはUEコンテキストを解放する。
【0008】
ところで、UEの移動速度が速いほど、HO可能エリアを通過する時間は早くなるため、HO処理に許容される時間は短くなる。特に、新幹線のように高速で移動する電車では、その要求はさらに厳しくなる。そのため、UEの移動速度が速いほど、許容される時間内でHO処理が完了せず、無線リンク断が発生する可能性が高くなる。
【0009】
この問題に対して、従来、UEの移動速度が速くなるほど、UEの測定報告の送信タイミングを早くするようパラメータ設定を行い、HOを早く開始するようにしていた。これについて、以下、図2を用いて具体的に説明する。
【0010】
UEでは、自セル及び隣接セルの受信電力(RSRP: Reference Signal Received Power)または受信品質(RSRQ: Reference Signal Received Quality)を測定する。自セル及び隣接セルにおける測定値の差(α+Hysteresis:αはセル固有のオフセット値)が、eNBから指定された値(entering condition)になると、UEはTTT(Time To Trigger)タイマを起動する。TTTタイマが満了すると、UEはeNBに測定報告を送信する。このTTTタイマのタイマ値に、UEの移動速度に応じた係数を乗算することにより、eNBへの測定報告の送信タイミングを調整することができる。
【0011】
UEの移動速度に応じた係数は、UEの移動速度を高速(High)、中速(Medium)、低速(Slow)の3段階に分類した場合、高速の場合には係数sf-High、中速の場合には係数sf-Medium(sf-High<sf-Medium<0)とする。各場合に応じた係数をTTTに乗算することにより、UEの測定報告の送信タイミングを調整する。
【0012】
なお、UEの移動速度の判定は、一定時間内に発生するセル間移動の回数によって判断する。すなわち、一定時間におけるセル間移動の回数が多いほど、移動速度が速く、少ないほど、移動速度が遅いと判断する。このように、一定時間内のセル間移動の回数に基づいて、UEの移動速度を高速、中速、低速のいずれかに判定する。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】3GPP, TS36.300 V10.4.0 "3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal Terrestrial Radio Access Network (E-UTRAN); Overall description; Stage 2 (Release 10)"
【発明の概要】
【発明が解決しようとする課題】
【0014】
しかしながら、上述した非特許文献1に開示の技術では、UEの移動速度に応じてHO開始タイミングを早くしても、HO処理そのものに要する時間は変わらないため、UEが高速でHO可能エリアを通過する場合、依然としてHOが完了しない可能性がある。
【0015】
また、UEが一定時間内でセル間を移動する回数とUEの移動速度との関係は必ずしも一致しない。例えば、図3(a)では、大きなセルを高速で移動するUEを示しているが、セル間の移動回数は少ないので、UEの移動速度は実際より遅い速度として判定される。また、図3(b)では、小さい複数のセルを低速で移動するUEを示しており、図3(c)では、2つのセル間を低速で往復するUEを示している。これらはセル間の移動回数が多いので、UEの移動速度は実際より速い速度として判定される。このように、UEの移動速度を誤って判定すると、誤った測定報告タイミングが設定され、UEの移動速度に応じたHO処理を行うことができない。
【0016】
さらに、多数のユーザを乗せた電車が移動することを想定した場合、多くのUEが同時にHOを行うことになり、HOのためのシグナリングが一斉に発生するため、移動元セル及び移動先セルのeNBにおける処理負荷(オーバーロード)が発生する。この結果、HOが遅延する可能性がある。また、最悪の場合、HOが失敗することが考えられ、このとき、UEは移動先セルで再接続を行うが、無線リンク断の時間が長くなるため、サービス品質が劣化してしまう。
【0017】
本発明の目的は、ハンドオーバ処理に要する時間を短縮し、ハンドオーバ成功確率を向上させ、さらに、ハンドオーバ処理にかかる基地局装置の処理負荷を低減する基地局装置及び無線通信方法を提供することである。
【課題を解決するための手段】
【0018】
本発明の基地局装置は、ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定手段と、前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を指示する予測移動先セルリソース取得指示手段と、確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御手段と、を具備する構成を採る。
【0019】
本発明の無線通信方法は、ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定工程と、前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を移動元の基地局装置から移動先の基地局装置に指示する予測移動先セルリソース取得指示工程と、確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御工程と、を具備するようにした。
【発明の効果】
【0020】
本発明によれば、ハンドオーバ処理に要する時間を短縮し、ハンドオーバ成功確率を向上させ、さらに、ハンドオーバ処理にかかる基地局装置の処理負荷を低減することができる。
【図面の簡単な説明】
【0021】
【図1】非特許文献1に開示されたHO制御手順を示すシーケンス図
【図2】UEの移動速度に応じたHO開始タイミングの調整の説明に供する図
【図3】UEの移動速度判定の説明に供する図
【図4】本発明の一実施の形態に係る基地局の構成を示すブロック図
【図5】予測移動先セルの予測方法の説明に供する図
【図6】図4に示した基地局を用いたHO制御手順を示すシーケンス図
【図7】HOに要する時間を従来方式と比較した様子を示す図
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0023】
(一実施の形態)
本実施の形態では、UEが、例えば、電車(新幹線を含む)で移動したり、高速道路をクルマで移動したりするなど、UEの移動経路が予測できる環境において、HOを行う移動先セル(以下、「予測移動先セル」という)を予測することを前提とし、電車または高速道路上のクルマでUEを利用することをユーザが事前に登録するものとする。登録情報は、管理サーバ等で保持され、ユーザが利用する電車または高速道路に関連する基地局に通知される。基地局では、通知された登録情報に該当するUEを予測可能な経路を移動するUEとして処理する。
【0024】
図4は、本発明の一実施の形態に係る基地局100の構成を示すブロック図である。以下、基地局の構成について図4を用いて説明する。
【0025】
無線受信処理部101は、UEからの無線信号を受信し、受信した無線信号に所定の無線受信処理を施す。無線受信処理が施された信号はRRCメッセージ解析部102に出力される。
【0026】
RRCメッセージ解析部102は、無線受信処理部101から出力された信号のうち、RRCメッセージの解析を行い、解析したRRCメッセージが測定報告(Measurement Reports)であった場合、測定報告をHO判定部103に出力すると共に、HOを実行するか否かを問い合わせる。RRCメッセージ解析部102は、HOを実行する場合は、HO制御部104にHO実行を指示し、HOを行わない場合は、HO制御部104への指示は行わない。また、解析したRRCメッセージがRRC Conn. Reconf. Complete(HO完了)である場合、RRCメッセージ解析部102は、HO制御部104にUEの移動先である予測移動先セルのリソース確保を指示する。
【0027】
HO判定部103は、RRCメッセージ解析部102から出力されたUEの測定報告に基づいて、HO実行の可否を判定し、判定結果をRRCメッセージ解析部102に出力する。
【0028】
HO制御部104は、RRCメッセージ解析部102から予測移動先セルのリソース確保の指示を受けると、経路予測可能UE管理部106に対して、UEが予測可能な経路移動を行うUEであるかを問い合わせ、経路予測不可の場合には、以降の処理を停止する。一方、経路予測可能な場合には、HO制御部104は、UE移動情報保持部107に対して、そのUEが以前在圏したセルを問い合わせる。
【0029】
また、HO制御部104は、予測移動先セル情報取得部105に対して、UEが以前在圏したセルの情報を通知し、予測移動先セル情報を問い合わせる。
【0030】
HO制御部104は、予測移動先セル情報を取得すると、予測移動先セルリソース管理部108に対して、そのUEの予測移動先セルのリソースがすでに確保されているか否かを確認する。確保されていない場合には、HO制御部104は、移動先セルリソース取得指示部110に対して、予測移動先セルのリソースを確保するよう指示し、確保されている場合には、特段の処理を行わない。なお、予測移動先セル情報取得部105から予測移動先セルなしの応答を受けた場合、HO制御部104は以降の処理を停止する。
【0031】
また、HO制御部104は、RRCメッセージ解析部102からHO実行の指示を受けると、予測移動先セルリソース管理部108に対して、そのUEの移動先セルのリソースがすでに確保されているか否かを確認し、確保されている場合には、UEにHO実行を指示するRRCメッセージの生成をRRCメッセージ生成部116に指示する。一方、確保されていない場合には、HO制御部104は、予測移動先セルリソース取得指示部110に対して、移動先セルのリソースを確保するよう指示する。
【0032】
予測移動先セル情報取得部105は、UEが以前在圏したセルから次に移動するセルを予測可能なデータベースを図示せぬ管理サーバから取得する。予測移動先セル情報取得部105は、HO制御部104から予測移動先セルの問い合わせを受けると、UEが以前在圏したセルから予測される移動先セルを管理サーバから取得したデータベースに基づいて検索し、検索された予測移動先セルを含む応答をHO制御部104に返す。データベースから予測移動先セルが検索されなかった場合、予測移動先セル情報取得部105は、予測移動先セルなしの応答をHO制御部104に返す。
【0033】
経路予測可能UE管理部106は、管理サーバから通知された、予測可能な経路移動を行うUEの識別子を保持し、UEが予測可能な経路移動を行うUEであるか否かの問い合わせをHO制御部104から受けると、保持するUEの識別子と一致するか否かを確認し、確認結果をHO制御部104に応答する。
【0034】
UE移動情報保持部107は、基地局100が移動先セルの基地局である場合、X2APメッセージ解析部114から通知された、新たにHOを行うUEの識別情報(C−RNTI)と当該UEの移動元セルの識別情報とを保持する。また、UE移動情報保持部107は、UEが以前在圏したセルの問い合わせをHO制御部104から受けると、UE識別情報から移動元セルの識別情報を応答する。
【0035】
予測移動先セルリソース管理部108は、予測移動先セルのリソース確保手順を実行中であることを予測移動先セルリソース取得指示部110から通知されると、そのUEの識別情報を保持する。また、予測移動先セルリソース管理部108は、HANDOVER REQUEST ACKNOWLEDGEメッセージを受信したことをX2APメッセージ解析部114から通知されると、HANDOVER REQUEST ACKNOWLEDGEメッセージに含まれるUEの識別情報と、保持するUEの識別情報とを比較する。これらの識別情報が一致する場合には、予測移動先セルリソース管理部108は、その予測移動先セルで確保したリソース管理情報を保持し、X2APメッセージ解析部114に一致したことを通知し、予測移動先セルリソース保持時間管理部109にタイマ起動を指示する。識別情報が一致しない場合には、予測移動先セルリソース管理部108は、X2APメッセージ解析部114に一致しないことを通知する。
【0036】
また、予測移動先セルリソース管理部108は、UEが予測移動先セルのリソースをすでに確保しているか否かの問い合わせをHO制御部104から受けると、保持している予測移動先セルのリソース管理情報を確認し、すでにリソースを確保している場合には、確保済みの応答を返し、まだ確保できていない場合には、未確保の応答を返す。
【0037】
さらに、予測移動先セルリソース管理部108は、予測移動先セルのリソース管理情報を削除するようX2APメッセージ解析部114から通知を受けた場合、そのUEの予測移動先セルのリソース管理情報を削除し、予測移動先セルリソース保持時間管理部109にタイマ停止を指示する。
【0038】
予測移動先セルリソース保持時間管理部109は、予測移動先セルリソース管理部108からタイマ起動の指示があった場合、該当するUEのために確保した予測移動先セルのリソース管理情報のタイマを起動する。タイマが満了した場合は、該当するUEの予測移動先セルのリソース解放を予測移動先セルリソース取得指示部110に指示する。予測移動先セルリソース管理部108からタイマ停止の指示があった場合、該当するUEに対応するタイマを停止する。
【0039】
予測移動先セルリソース取得指示部110は、予測移動先セルのリソースを確保する指示をHO制御部104から受けた場合、予測移動先セルでのリソースの確保を指示するメッセージの生成をX2APメッセージ生成部111に指示する。また、予測移動先セルリソース取得指示部110は、予測移動先セルリソース管理部108に対して、該当するUEのために予測移動先セルのリソース確保手順を実行中であることを通知する。
【0040】
予測移動先セルリソース取得指示部110は、予測移動先セルリソース保持時間管理部109から予測移動先セルのリソース解放の指示を受けると、予測移動先セルのリソース解放を指示するメッセージの送信をX2APメッセージ生成部111に指示する。
【0041】
予測移動先セルリソース取得指示部110は、移動先セルのリソースを確保する指示をHO制御部104から受けた場合、移動先セルでのリソースの確保を指示するメッセージの生成をX2APメッセージ生成部111に指示する。
【0042】
X2APメッセージ生成部111は、予測移動先セルまたは移動先セルでのリソース確保を指示するメッセージの生成を予測移動先セルリソース取得指示部110から指示された場合、予測移動先セルまたは移動先セル宛てのHO要求(HANDOVER REQUEST)メッセージを生成し、生成したメッセージをX2APメッセージ送信部112に出力する。また、X2APメッセージ生成部111は、予測移動先セルにおいて確保したリソースの解放を指示するメッセージの生成を予測移動先セルリソース取得指示部110から指示された場合、予測移動先セル宛てのHO中止(HANDOVER CANCEL)メッセージを生成し、生成したメッセージをX2APメッセージ送信部112に出力する。
【0043】
X2APメッセージ送信部112は、X2APメッセージ生成部111から出力されたメッセージの送信処理を行い、基地局100が移動元である場合には移動先基地局に、基地局100が移動先である場合には移動元基地局に、送信処理を行ったX2APメッセージを送信する。
【0044】
X2APメッセージ受信部113は、基地局100が移動元である場合には移動先基地局から、基地局100が移動先である場合には移動元基地局からX2APメッセージを受信し、受信したX2APメッセージをX2APメッセージ解析部114に出力する。
【0045】
X2APメッセージ解析部114は、HANDOVER REQUEST ACKNOWLEDGEメッセージがX2APメッセージ受信部113から出力された場合、UEの識別情報と予測移動先セルのリソース情報の管理を予測移動先セルリソース管理部108に指示する。X2APメッセージ解析部114は、予測移動先セルリソース管理部108から一致するUE識別情報があるとの応答を受けた場合、以降の処理を終了し、一致するUEの識別情報がないとの応答を受けた場合、UEにHOの開始を指示するメッセージの生成をRRCメッセージ生成部116に指示する。
【0046】
また、X2APメッセージ解析部114は、UEコンテキスト解放(UE CONTEXT RELEASE)メッセージがX2APメッセージ受信部113から出力された場合、該当するUEのための予測移動先セルのリソース管理情報の削除を予測移動先セルリソース管理部108に指示する。
【0047】
さらに、X2APメッセージ解析部114は、HO要求(HANDOVER REQUEST)メッセージがX2APメッセージ受信部113から出力された場合、基地局100は移動先セルの基地局であるので、新たにHOを行うUEの識別情報(C−RNTI)と移動元セルの識別情報とをUE移動情報保持部107に出力する。
【0048】
UE測定指示部115は、UEにおける測定の指示及びこの測定に必要な情報をRRCメッセージ生成部116に通知する。
【0049】
RRCメッセージ生成部116は、UE測定指示部115の指示に基づいて、測定制御(Measurement Control)メッセージを生成し、生成した測定制御メッセージを無線送信処理部117に出力する。また、RRCメッセージ生成部116は、UEにHO実行を指示するRRCメッセージの生成の指示をHO制御部104から受けた場合、予測移動先セルリソース管理部108から必要な情報を取得し、RRC Conn. Reconf incl. mobilityControlInfomationを生成して、無線送信処理部117に出力する。さらに、RRCメッセージ生成部116は、UEにHO実行を指示するRRCメッセージの生成がX2APメッセージ解析部114から指示された場合、RRC Conn. Reconf incl. mobilityControlInfomationを生成して、無線送信処理部117に出力する。
【0050】
無線送信処理部117は、RRCメッセージ生成部116から出力されたメッセージに所定の送信処理を施し、送信処理を施した信号をUEに送信する。
【0051】
ここで、予測移動先セルの予測方法について説明する。管理サーバには、例えば、図5(a)に示すような地図情報(鉄道路線など)とセル配置の関係が登録されている。図5(a)では、地図情報(鉄道路線)である路線X及び路線Yと、セル配置であるセルA〜セルVとの関係を示している。管理サーバは、この関係に基づいて、UEが以前在圏したセルから次に移動するセルをデータベースとして保有し、このデータベースを基地局に通知する。例えば、図5(a)において、路線Xと路線Yとが交差するセルIでは、UEが以前在圏したセルがセルHである場合、予測移動先セルはセルOとなり、UEが以前在圏したセルがセルOである場合、予測移動先セルはセルHとなる。同様に、UEが以前在圏したセルがセルNである場合、予測移動先セルはセルJとなり、UEが以前在圏したセルがセルJである場合、予測移動先セルはセルNとなる。これらの関係をまとめたものが図5(b)に示すデータベースであり、このデータベースがセルIの基地局に通知される。
【0052】
管理サーバを用いた上記の予測方法以外にも次のような方法が考えられる。UEが以前在圏したセルと次に移動したセルの情報を基地局が蓄積し、同一パターンのHOの回数が所定の閾値を超えた場合、データベースに登録する。図5(a)に示したセルIを例に挙げると、次のパターンによるHOが高頻度で観測される。すなわち、パターン1(セルH→セルI→セルO)、パターン2(セルO→セルI→セルH)、パターン3(セルN→セルI→セルJ)、パターン4(セルJ→セルI→セルN)の4つのパターンである。これらのパターンによるHO回数が所定の閾値を超えると、図5(b)に示すデータベースが作成される。
【0053】
次に、図4に示した基地局を用いたHO制御手順について図6を参照して説明する。図6において、ST201〜ST204では、現在のセル(移動元セル)の基地局(Source eNB)へのHO完了(Source eNBでの RRC Conn. Reconf. Complete受信)を契機として、予測移動先セルのリソースを確保する。
【0054】
ST205では、移動元セルの基地局は、UEがHO実行を判断するための自セル及び隣接セルの測定を指示(Measurement Control)し、ST206では、UEは、指示に基づいて受信電力または受信品質の測定を行い、移動元セルの基地局から指定される条件を満たすと、移動元セルの基地局に測定報告(Measurement Report)を行う。
【0055】
ST207では、移動元セルの基地局は、UEから測定報告(measurement report)を受信し、HO実行を決定すると、ST208において、直ちにUEに対して移動先セルへ無線リンクの切り替えを指示する(RRC Conn. Reconf. Incl. mobilityControlinformation送信)。
【0056】
ST209〜ST211では、UEが、移動先セルへ無線リンクを切り替える。
【0057】
ST212〜ST217では、移動先セルの基地局(Target eNB)は、MMEに移動先セルの基地局への経路切り替えを要求し、経路の変更が完了すると、移動先セルの基地局は、移動元セルの基地局に、UEコンテキストの解放を指示する。ST218では、移動元セルの基地局はUEコンテキストを解放する。
【0058】
次に、HOに要する時間を従来方式と比較した様子を図7に示す。図7では、セルA〜セルEの方向へ電車で移動する場合を想定する。図7において、SR_X(X=B〜E)はセルXにおけるリソース確保開始タイミングを示し、SE_X(X=B〜E)はセルXにおけるHO実行開始タイミングを示し、CH_X(X=B〜E)はセルXへのHO完了タイミングを示している。
【0059】
図7(a)は、UEの移動速度に応じてHO開始タイミングを調整する従来のHOの様子を示す図である。図7(a)において、例えば、セルAからセルBへのHOについて見てみると、セルBのリソースを確保した後、HOが実行されており、トータルのHO時間はリソース確保開始タイミングからHO完了タイミングまでとなることが分かる。また、セル間移動の回数に基づくUEの移動速度判定により、セルAからセルBへのHOおよびセルBからセルCへのHOに比べて、セルCからセルDへのHOおよびセルDからセルEへのHOでのリソース確保開始タイミングが早まっていることが分かる。
【0060】
図7(b)は、本実施の形態に係るHOの様子を示す図であり、図7(c)は、UEの移動速度判定に応じてHOの開始タイミングを調整する本実施の形態に係るHOの様子を示す図である。
【0061】
図7(b)及び図7(c)において、例えば、セルAからセルBへのHOについて見てみると、セルBのリソースはすでに確保されているため、セルBへ移動したUEは直ちにHOの実行を開始することができる。UEはセルBへのHOが完了すると、移動先セルCのリソースを確保する。なお、図7(c)では、図7(a)と同様、セル間移動の回数に基づくUEの移動速度判定により、セルAからセルBへのHOおよびセルBからセルCへのHOに比べて、セルCからセルDへのHOおよびセルDからセルEへのHOでのリソース確保開始タイミングが早まっている。
【0062】
このように、移動元セルにHOが完了した時点で移動先セルのリソースを確保することにより、移動先セルへのHOに要する時間を短縮することができる。
【0063】
以上、説明したように、本実施の形態によれば、UEの移動経路が予測できる環境において、UEの移動先のセルを予測し、移動元セルにHOが完了した時点で予測移動先セルのリソースを確保することにより、移動先セルへのHOに要する時間を短縮することができ、HO可能エリア内でHOが完了する可能性が高くなるので、HO成功確率を向上させることができる。さらに、移動先セルのリソース確保のシグナリングがHO実行時以外に行われるため、HO処理にかかる基地局の処理負荷を低減することができる。
【産業上の利用可能性】
【0064】
本発明にかかる基地局装置及び無線通信方法は、移動通信システム等に適用できる。
【符号の説明】
【0065】
101 無線受信処理部
102 RRCメッセージ解析部
103 HO判定部
104 HO制御部
105 予測移動先セル情報取得部
106 経路予測可能UE管理部
107 UE移動情報保持部
108 予測移動先セルリソース管理部
109 予測移動先セルリソース保持時間管理部
110 予測移動先セルリソース取得指示部
111 X2APメッセージ生成部
112 X2APメッセージ送信部
113 X2APメッセージ受信部
114 X2APメッセージ解析部
115 UE測定指示部
116 RRCメッセージ生成部
117 無線送信処理部
【特許請求の範囲】
【請求項1】
ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定手段と、
前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を指示する予測移動先セルリソース取得指示手段と、
確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御手段と、
を具備する基地局装置。
【請求項2】
確保された前記リソースを示すリソース情報及び前記端末の識別情報を保持し、前記端末が前記予測移動先セルへのハンドオーバが完了した場合、前記リソース情報及び前記端末の識別情報を削除する予測移動先セルリソース管理手段を具備する請求項1に記載の基地局装置。
【請求項3】
前記予測移動先セルリソース管理手段は、前記リソースが確保された場合、前記リソース情報及び前記端末の識別情報の保持時間を制限するタイマを起動し、前記タイマが満了した時点で保持している前記リソース情報及び前記端末の識別情報を削除する請求項2に記載の基地局装置。
【請求項4】
前記予測移動先セル判定手段は、地図情報及びセル配置の関係に基づいて、前記端末が以前在圏したセルから移動先セルを予測する請求項1に記載の基地局装置。
【請求項5】
前記予測移動先セル判定手段は、前記端末が以前在圏したセルの情報及びハンドオーバが行われた移動先セルの情報を蓄積し、蓄積結果に基づいて、前記端末が以前在圏したセルから移動先セルを予測する請求項1に記載の基地局装置。
【請求項6】
ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定工程と、
前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を移動元の基地局装置から移動先の基地局装置に指示する予測移動先セルリソース取得指示工程と、
確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御工程と、
を具備する無線通信方法。
【請求項1】
ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定手段と、
前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を指示する予測移動先セルリソース取得指示手段と、
確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御手段と、
を具備する基地局装置。
【請求項2】
確保された前記リソースを示すリソース情報及び前記端末の識別情報を保持し、前記端末が前記予測移動先セルへのハンドオーバが完了した場合、前記リソース情報及び前記端末の識別情報を削除する予測移動先セルリソース管理手段を具備する請求項1に記載の基地局装置。
【請求項3】
前記予測移動先セルリソース管理手段は、前記リソースが確保された場合、前記リソース情報及び前記端末の識別情報の保持時間を制限するタイマを起動し、前記タイマが満了した時点で保持している前記リソース情報及び前記端末の識別情報を削除する請求項2に記載の基地局装置。
【請求項4】
前記予測移動先セル判定手段は、地図情報及びセル配置の関係に基づいて、前記端末が以前在圏したセルから移動先セルを予測する請求項1に記載の基地局装置。
【請求項5】
前記予測移動先セル判定手段は、前記端末が以前在圏したセルの情報及びハンドオーバが行われた移動先セルの情報を蓄積し、蓄積結果に基づいて、前記端末が以前在圏したセルから移動先セルを予測する請求項1に記載の基地局装置。
【請求項6】
ハンドオーバを行う端末の移動先のセルを予測する予測移動先セル判定工程と、
前記端末が予測移動先セルへハンドオーバを実行する前に、前記端末のハンドオーバに備えて前記予測移動先セルにおけるリソースの確保を移動元の基地局装置から移動先の基地局装置に指示する予測移動先セルリソース取得指示工程と、
確保された前記リソースを用いた、前記端末の前記予測移動先セルへのハンドオーバを制御するハンドオーバ制御工程と、
を具備する無線通信方法。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−85066(P2013−85066A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−222754(P2011−222754)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]