
基板の両面パターニングする方法及びシステム
本発明は、基板の第1と第2の両面をパターニングする方法及びシステムを対象とする。方法及びシステムは、モールド・アセンブリを用い、基板の第1と第2の両面とモールド・アセンブリとの間に所望の空間関係を得る。さらなる実施形態において、方法及びシステムは、第1と第2のモールド・アセンブリを用いる。
【発明の詳細な説明】
【関連出願】
【0001】
(関連出願の相互引用)
本出願は、その全体が参照によって本明細書に組み込まれる、名称「Apparatus for and Method for Imprinting,Aligning,and Separation for Double Side Imprinting」の2005年12月8日に出願された、米国特許仮出願第60/748430号に対する優先権を主張する。
【技術分野】
【0002】
本発明の分野は、一般に構造のナノ製造に関する。より詳細には、本発明は、基板の両面パターニングの方法及びシステムを対象とする。
【背景技術】
【0003】
ナノ製造は、例えば数ナノメートル以下の程度のフューチャを有する、非常に小さい構造の製造を含む。ナノ製造が相当な影響を有する1つの領域は集積回路の処理である。半導体処理工業は、基板上に形成される単位面積当たりの回路を増大しながら、より大きな製造歩留まりに関する努力を続けているので、ナノ製造はますます重要になっている。ナノ製造は、形成された構造の最小フューチャ寸法のさらなる低減を可能にしながら、より大きなプロセス制御を与える。ナノ製造が用いられる開発の他の領域は、生物工学、光学技術、機械システムなどを含む。
【0004】
ナノ製造技術の一例は、一般にインプリント・リソグラフィと呼ばれる。例示的なインプリント・リソグラフィ・プロセスは、すべて本発明の譲渡者に譲渡された、名称「Method and a Mold to Arrange Features on a Substrate to Replicate Features having Minimal Dimensional Variability」の米国特許出願第10/264960号として出願された、米国特許出願公開第2004/0065976号、名称「Method of Forming a Layer on a Substrate to Facilitate Fabrication of Metrology Standards」の米国特許出願第10/264926号として出願された、米国特許出願公開第2004/0065252号、名称「Functional Patterning Material for Imprint Lithography Processes」の米国特許第6936194号などの多くの刊行物に詳細に記載されている。
【0005】
前述の各米国特許出願公開や米国特許に開示されるインプリント・リソグラフィ技術は、ポリマー化可能な層内のレリーフ・パターンの形成、及び下にある基板へのレリーフ・パターンに対応するパターンの転写を含む。基板は、そのパターニングを容易にするように所望の位置を得るために、移動ステージ上に配置される。このために、テンプレートが、テンプレートと基板との間に存在する成形可能液体を有する基板から離して用いられる。液体は、固化された層を形成するように固化され、固化された層は、それに記録されたパターンを有し、記録されたパターンは、液体と接触するテンプレートの表面の形状に一致する。テンプレートは、次に、テンプレートが基板から離れるようにように、固化された層から分離させられる。基板と固化された層は、次に、固化された層内のパターンに対応するレリーフ画像を基板に転写するためのプロセスを受ける。
【発明の開示】
【発明が解決しようとする課題】
【0006】
いくつかの応用において、基板の第1と第2の両面にレリーフ・パターンを形成することが望ましい。基板の第1と第2の両面にパターンを形成する、すなわち両面パターニングは、パターン化媒体インプリントの分野で有用である。このために、基板の両面パターニングの方法及びシステムを提供する必要性が存在する。
【発明を実施するための最良の形態】
【0007】
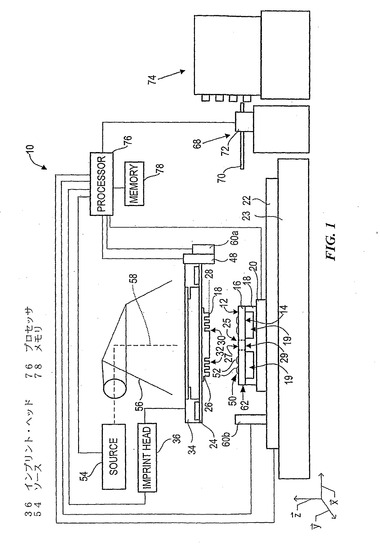
図1を参照すると、基板16の第1の面12と第2の面14上にレリーフ・パターンを形成するためのシステム10が示される。一例において、基板16には、実質的に位置合わせマークがなくてもよい。基板16は、基板チャック18に結合され、基板チャック18は、真空や電磁を含むがそれらに制限されない任意のチャックである。基板チャック18は、基板16に面する空洞19を備えることができる。基板16と基板チャック18は、第1のステージ20と第2のステージ22上で支持され、第1のステージ20は、基板チャック18と第2のステージ22との間に配置される。さらに第1のステージ20と第2のステージ22は、ベース23上に配置される。第1のステージ20は、第1の軸の周りに移動でき、一方、第2のステージ22は、第1の軸に対して垂直である第2の軸の周りに移動できる。すなわち、第1の軸はx軸で、第2の軸はy軸である。本発明における例示的なステージは、California IrvineのNewport Corporationから、部品番号XM2000で入手できる。基板16は、基板16の第1の面12に開口27を有し、基板16の第2の面14に開口29を有するスルーウェイ25をさらに備えている。しかしながら、さらなる実施形態において、基板16には、実質的にスルーウェイ25がなくてもよい。
【0008】
その上にパターニング面28を有し、基板16に向かって広がっているメサ26を有するテンプレート24が、基板16から離れている。メサ26は、モールド26と呼ばれることもある。しかしながら、さらなる実施形態において、テンプレート24には、実質的にモールド26がなくてもよい。テンプレート24及び/又はモールド26は、溶融シリカ、水晶、シリコン、有機ポリマー、シロキサン・ポリマー、ホイケイ酸ガラス、フルオロカーボン・ポリマー、金属、硬化サファイヤを含むがそれらに限定されない材料から形成される。示されるようにパターニング面28は、複数の離間された凹部30と突出部32によって形成されるフューチャを備える。しかしながら、さらなる実施形態において、パターニング面28は、実質的に平滑かつ/又は平坦であってもよい。パターニング面28は、独創的なパターンを形成することができ、独創的なパターンは、以下でさらに記載される基板16の第1の面12と第2の面14に形成されるパターンの基礎を形成する。テンプレート24は、テンプレート・チャック34に結合されれる。テンプレート・チャック34は、真空や電磁を含むがこれらに制限されない任意のチャックである。さらにテンプレート・チャック34は、テンプレート24とモールド26の移動を容易にするためにインプリント・ヘッド36に結合される。
【0009】
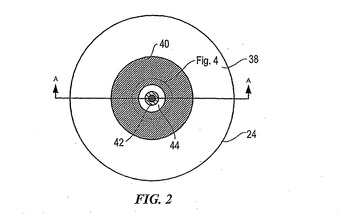
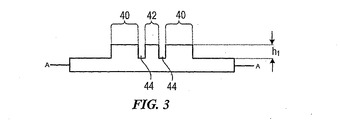
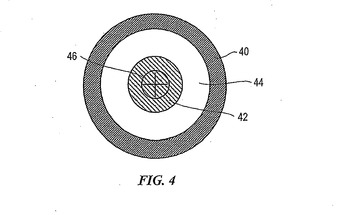
図2、図3を参照すると、テンプレート24の上方から下方への図が示される。示されるように、テンプレート24は円形形状である。しかしながら、さらなる実施形態において、テンプレート24は、所望の任意の幾何形状を備えることができる。さらにテンプレート24は、第1の領域38、第2の領域40、第3の領域42を備え、第2の領域40は、第1の領域38と第3の領域42との間に配置される。第2の領域40は、能動領域40と称されることもある。さらに示されるように、第3の領域42は、テンプレート24の中心に配置されるが、さらなる実施形態において、第3の領域42は、望ましいテンプレート24の任意の位置に配置できる。図1に示されるモールド26は、能動領域40に重ね合わされる。能動領域40と第3の領域42は、高さh1を有する。一例において、高さh1は、5ミクロン〜15ミクロンの範囲である。さらなる実施形態において、能動領域40と第3の領域42の高さは異なることができる。さらに、能動領域40と第3の領域42との間に配置された凹部44が存在してもよい。
【0010】
図2、図4を参照すると、第3の領域42は、位置合わせマーク46を含む。一例において、位置合わせマーク46は、標準の汎用位置合わせターゲット(UAT)である。位置合わせマーク46は、図1に示されるテンプレート24と基板16との間の所望の空間関係を得るために用いられる。
【0011】
図1を参照すると、システム10は、さらに流体ディスペンサ48を備える。流体ディスペンサ48は、以下にさらに記載される、基板16上にポリマー材料50を配置するように基板16と流体連通される。示されるように流体ディスペンサ48は、テンプレート・チャック34に結合されるが、さらなる実施形態において、流体ディスペンサ48は、システム10の任意の部品、すなわちテンプレート24又はインプリント・ヘッド36に結合されるてもよい。さらにシステム10は、任意の数の流体ディスペンサを備えることができ、流体ディスペンサ48は、その内に複数のディスペンス・ユニットを備えることができる。ポリマー材料50は、例えば、ドロップ・ディスペンス、スピン・コーティング、浸漬コーティング、薄膜堆積、厚膜堆積、などの任意に知られている技術を使用して基板16上に配置される。示されるようにポリマー材料50は、複数の離間された液滴52として基板16上に配置される。
【0012】
システム10は、経路58に沿ってエネルギー56を向けるために結合されたエネルギー56のソース54をさらに備える。一例においてソース54は、液体ガイド又は紫外線ファイバ・ガイドのいずれかに結合される紫外線放射ランプである。本発明におけるエネルギーの例示的なソースは、Connecticut、TorringtonのDYMAX Corporationから、部品番号BlueWave(商標)200 Spot Lampの下で入手可能である。インプリント・ヘッド36及び第1と第2のステージ20、22は、モールド26と基板16それぞれが経路58と重ね合わせられかつ経路58内に配置されるように、構成される。インプリント・ヘッド36、第1のステージ20、第2のステージ22、又はそれらの組合せは、以下でさらに記載されるように、モールド26と基板16との間の距離を、それらの間にポリマー材料50によって満たされる所望の容積を形成するために、変更することができる。
【0013】
システム10は、撮像ユニット60a、60bを有する光学検出システムをさらに備える。示されるように、撮像ユニット60aは、流体ディスペンサ48に結合されているが、さらなる実施形態において、撮像ユニット60aは、システム10の任意の部品、すなわち、テンプレート24、テンプレート・チャック34、又はインプリント・ヘッド36に結合されてもよい。さらに示されるように、撮像ユニット60bは、第2のステージ22に結合されているが、さらなる実施形態において、撮像ユニット60bは、システム10の任意の部品、すなわち、基板チャック18又は第1のステージ20に結合されてもよい。さらに、システム10は、任意の数の撮像ユニット60a、60bを備えることができる。撮像ユニット60a、60bは、画像処理モジュール(図示されず)とデータ通信する顕微鏡である。さらなる実施形態において、撮像ユニット60a、60bは、レーザ縁部検出センサであってもよい。
【0014】
図1、図5、図6を参照すると、撮像ユニット60a、60bは、それぞれ基板16とモールド26を検出するために用いられる。より詳細には、撮像ユニットは、基板16の縁部62を検出する。さらなる実施形態において、図5、図6において、ここで、撮像ユニット64a、64a’、64b、64b’として示される撮像ユニット60aは、基板16の中心位置、すなわちx軸とy軸に関するスルーウェイ25を決定するために用いられる。より詳細には、撮像ユニット64a、64bは、それぞれビーム66a、66bを生成するレーザであり、撮像ユニット64a’、64b’は、それぞれビーム66a、66bを検出する強度センサである。示されるように、撮像ユニット64a、64a’、64b、64b’は、開口25を検出する。撮像ユニット64a、64bは、軸外れ又はスルー・ザ・テンプレートとして用いられる。本発明で用いられる例示的な強度センサは、New Jersey、Woodcliff LakeのKeyence、Inc.から部品番号LV−H37の下で入手可能である。
【0015】
図1と図7を参照すると、システム10は、基板チャック18上に基板16を配置し、かつ基板チャック18から基板16を取り外すためのロボット68をさらに備える。ロボット68は、当技術で知られている任意のハンドリング・ロボットでよい。一例においてロボット68は、駆動手段72に結合されたアーム70を備える。アーム70は、基板16を扱うためにそれに結合されたエンド・エフェクタ73をさらに有する。一例においてエンド・エフェクタ73は、上に配置されたポリマー材料50を有する基板16の領域、すなわち基板16の能動領域と接触することなく基板16を保持するためのエッジ・グリッピング又は薄い空気空洞チャックである。駆動手段72は、アーム70を拡張又は収縮し、アーム70をその軸の周りで回転させ、又はアーム70を水平方向に円で移動させ、又はアーム70の任意の所望の動きを与えることができる。駆動手段72は、上述の第1と第2の軸に対して動きを与えることができる。一例において、駆動手段72は、以下にさらに記載される、基板16をフリップするためにx軸の周りで回転することができる。駆動手段72は、その軸の周りで回転することもできる。さらにロボット68は、基板チャック18と基板カセット74との間に基板16を輸送することができる。基板カセット74は、その内に複数の基板16を備えることができる。
【0016】
図1を参照すると、典型的にポリマー材料50は、所望の容積がモールド26と基板16との間に形成される前に、基板16上に配置される。しかしながら、ポリマー材料50は、所望の容積が得られた後で容積を満たすことができる。所望の容積が、ポリマー材料50で満たされた後、ソース54は、エネルギー56、例えば広帯域紫外放射線を生成する。エネルギー56は、ポリマー材料50を、基板16の第1の面12とモールド26のパターニング面28の形状に一致させて固化させかつ/又は架橋させる。このプロセスの制御は、プロセッサ76によって調整され、プロセッサ76は、第1のステージ20と、第2のステージ22と、インプリント・ヘッド36と、流体ディスペンサ48と、ソース54と、撮像ユニット60a、60bと、ロボット68とデータ通信し、メモリ78内に格納されたコンピュータ可読プログラムで動作する。
【0017】
上述のように、システム10は、基板16の第1の面12上にパターンを形成するために用いられる。しかしながら、基板16の第1の面12と第2の面14の両方が、形成されたパターンを有するように、基板16の第2の面14上にパターンを形成することが望ましい。このために、基板16の第1の面12と第2の面14上にパターンを形成するシステム及び方法が、以下に記載される。
【0018】
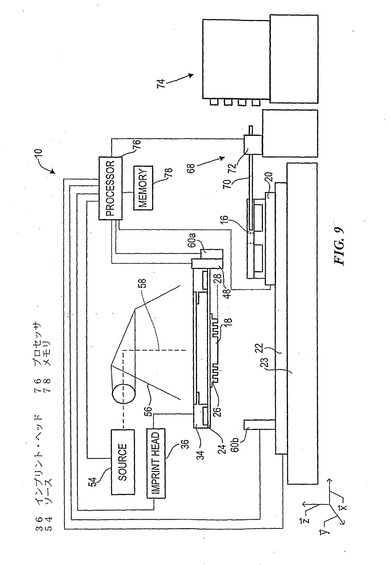
図8、図9を参照すると、第1の実施形態において、基板16の第1の面12と第2の面14上にパターンを形成するシステム及び方法が示される。上述のように、ステップ100で、基板16は、基板チャック18上に配置される。より詳細には、第1のステージ20と第2のステージ22は、ロボット68が、基板16を基板チャック18上に配置することができるように、ロボット68に近接して基板チャック18を位置決めする。ロボット68は、基板16を基板カセット74から移し、第1の面12と第2の面14の一面が、基板チャック18に対して配置されるように、基板16を基板チャック18上に配置する。第1の例において、ロボット68は、第1の面12が基板チャック18から離れて面し、一方、第2の面14が基板チャック18に向かうように、基板16を配置する。第2の例において、ロボット68は、第2の面14が基板チャック18から離れて面し、第1の面12が基板チャック18に向かうように、基板16を配置することができる。ステップ102で、撮像ユニット60aは、基板16の位置を決定する。より詳細には、撮像ユニット60aは、システム10の任意の部品、すなわちモールド18、ディスペンス・ユニット48、又はロボット68に対して、図5、図6に関して上述されたように、基板16の中心位置を決定するために用いられる。結果として、システム10の任意の部品に対する基板16の所望の空間関係を得ることができる。
【0019】
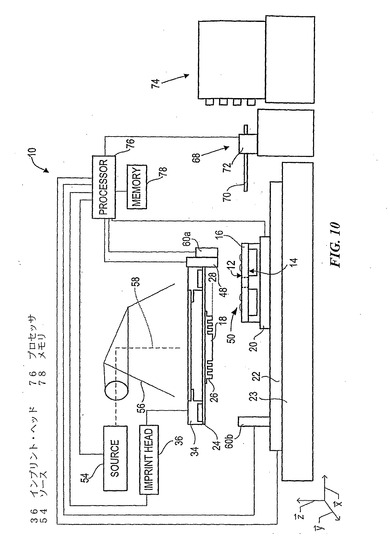
図8と図10を参照すると、ステップ104で、第1のステージ20と第2のステージ22は、所望の位置が、基板16と流体ディスペンサ48との間に得られるように、基板16を並進させる。結果として、流体ディスペンサ48が、上述のように基板16の第1の面12上にポリマー流体50を配置することができる。
【0020】
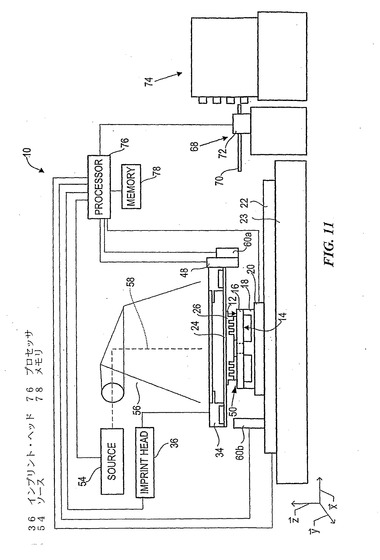
図8と図11を参照すると、ステップ106で、所望の位置が、基板16とモールド26との間で得られる。より詳細には、第1のステージ20と第2のステージ22とインプリント・ヘッド36は、基板16が、モールド26と重ね合わされるように、基板チャック18を位置決めし、かつさらなるポリマー材料50が、基板16とモールド26との間の形成された所望の容積を満たす。ステップ108で、上述のように、基板16の第1の面12上に配置されたポリマー材料50は、基板16の第1の面12とモールド26のパターニング面28に一致して固化されかつ/又は架橋される。ステップ110で、モールド26は、基板16の第1の面12上に配置されたポリマー材料50から分離される。
【0021】
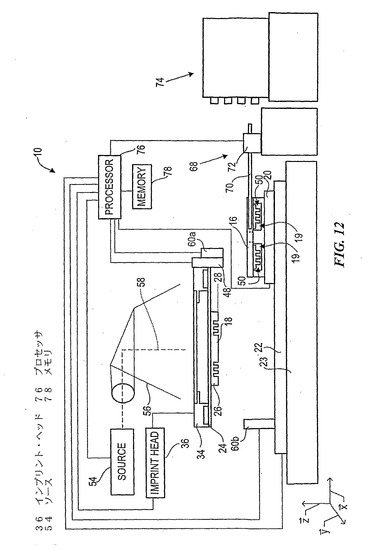
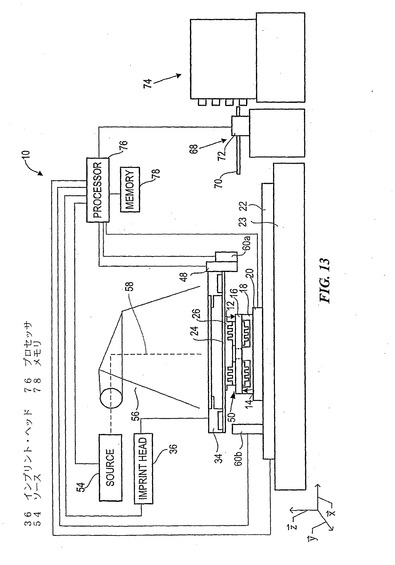
図8と図12を参照して、ステップ112で、ステップ100に関する上述に類似して、第1のステージ20と第2のステージ22は、ロボット68に近接して基板チャック18を位置決めする。ステップ114で、ロボット68は、ロボット68を介して基板チャック18から基板16を分離する。ステップ116で、基板16は、基板16の第1の面12と第2の面14がパターニングされたかどうかを決定するために解析される。これによって、ステップ118で、基板16の第1の面12と第2の面14の一方の面だけがパターニングされているなら、ロボット68は、基板16の第1の面12と第2の面14の残るパターニングされていない面が、基板チャック18の反対側に配置されるように、基板16をモールド26に対して180°フリップするように、軸の周りでアーム70を回転し、かつ基板チャック18上に基板16を配置する。第1の例において、基板16の第1の面12がパターニングされるなら、第1の面12が基板チャック18に向かって面し、かつ第2の面14が基板チャック18から離れて面するように、ロボット68は、基板16を配置する。第2の例において、基板16の第2の面14がパターニングされているなら、第2の面14が基板チャック18に向かって面し、かつ第1の面12が基板チャック18から離れて面するように、ロボット68は、基板16を配置する。さらに、基板16の第1の面12と第2の面14の一面上でパターニングされたポリマー材料50は、ポリマー材料50に対する損傷を防げないにしても最小化するために、基板チャック18の空洞19内に配置される。このために、基板16の第1の面12と第2の面14の残る面は、図8〜図12における上述と類似してパターニングされ、基板16は、図13に示されるようにパターニングされた第1の面12と第2の面14を有する。
【0022】
図1、図8を参照すると、しかしながら、基板16の第1の面12と第2の面14の両方がパターニングされているなら、ステップ120で、基板16は、基板チャック18から外され、ロボット68は、基板カセット74内に基板16を配置する。さらなる実施形態において、流体ディスペンサ48は、システム10の外側に配置されてもよく、基板16の第1の面12と第2の面14は、システム10の外側でその上に配置されたポリマー流体50を有する。さらに、ロボット68及び/又は基板チャック18と接触する基板16の部分からポリマー流体50を取り除くことが望ましい。
【0023】
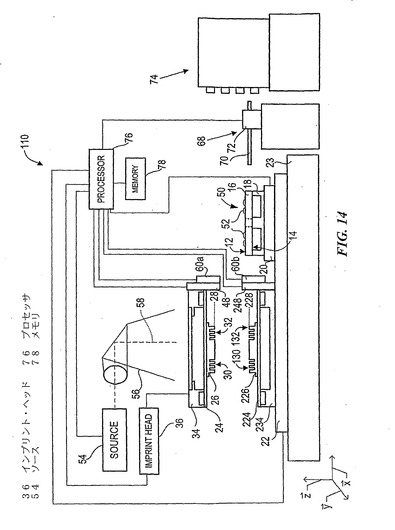
図14を参照すると、システム110として示されるように、システム10の第2の実施形態が記載される。システム110は、図1〜図7に関して上述されたシステム10に類似するが、システム110は、以下にさらに記載される追加のパターニング面を備えている。
【0024】
このために、システム110は、パターニング面228を有し、テンプレート24に向いて広がっているモールド226を有するテンプレート224をさらに備える。テンプレート224は、テンプレート・チャック234に結合される。テンプレート224、モールド226、テンプレート・チャック234は、図1に関して上述されたそれぞれテンプレート24、モールド26、テンプレート・チャック34に類似してい。モールド226は、モールド26のパターニング面28と実質的に同一のパターニング面228を有するが、さらなる実施形態において、パターニング面228は、パターニング面28とは異なることもできる。テンプレート224、モールド226、テンプレート・チャック234は、第2のステージ22に結合され、第2のステージ22は、図1に関して上述された第2の軸の周りのテンプレート224、モールド226、テンプレート・チャック234を移動させる。結果として、モールド226は、以下にさらに記載される基板16の第1の面12と第2の面14のパターニングを容易にするために、モールド26に重ね合って配置される。さらなる実施形態において、テンプレート224、モールド226、テンプレート・チャック234は、さらに第1のステージ20に結合される。
【0025】
システム110は、さらに流体ディスペンサ248を備え、流体ディスペンサ248は、図1に関して上述された流体ディスペンサ48に類似する。示されるように、流体ディスペンサ248は、テンプレート・チャック234に結合されるが、さらなる実施形態において、流体ディスペンサ248は、システム210の任意の部分、すなわちテンプレート224又は第2のステージ22に結合される。さらに、撮像ユニット60bは、流体ディスペンサ248に結合されて示されるが、さらなる実施形態において、撮像ユニット60bは、システム110の任意の部分、すなわち第2のステージ22、テンプレート224、又はテンプレート・チャック234に結合される。流体ディスペンサ248の制御は、流体ディスペンサ248とデータ通信するプロセッサ76によって調整される。
【0026】
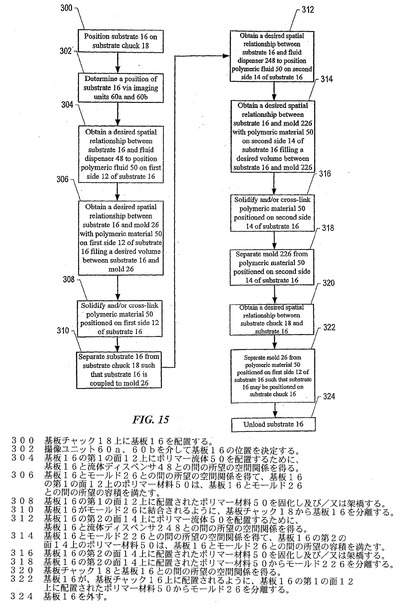
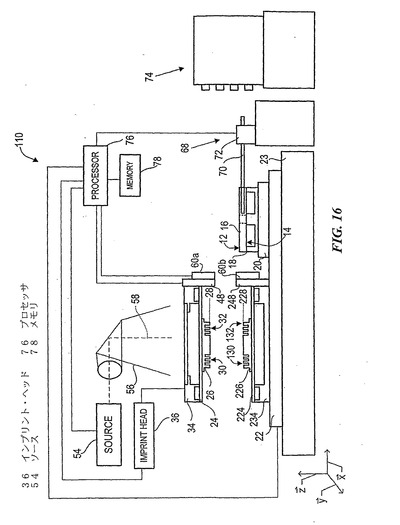
図15と図16を参照すると、基板16の第1の面12と第2の面14上にパターンを形成する方法及びシステムの第2の実施形態が示される。上述のように、ステップ300で、基板16は、基板チャック18上に配置される。より詳細には、第1のステージ20と第2のステージ22は、ロボット68が基板チャック18上に基板16を配置することができるように、ロボット68の近位に基板チャック18を位置決めする。ロボット68は、基板カセット74から基板16を移送し、かつ第1の面12と第2の面14の一面が基板18を向いて配置されるように、基板16を基板チャック18上に配置する。図示を簡略性のために、プロセッサ76と、第1のステージ20、撮像ユニット60b、流体ディスペンサ248との間の結合は示されていないことに留意されたい。
【0027】
ステップ302で、撮像ユニット60a、60bは、基板16の位置を決定する。より詳細には、撮像ユニット60a、60bは、図5、図6に関して上述されるように、システム10の任意の部品に対して、すなわちモールド26、226、ディスペンス・ユニット48、248、又はロボット68に対して、基板16の中心位置を決定するために用いられる。結果として、さらに以下に記載される、システム10の任意の部品に対する基板16の所望の空間関係が得られる。
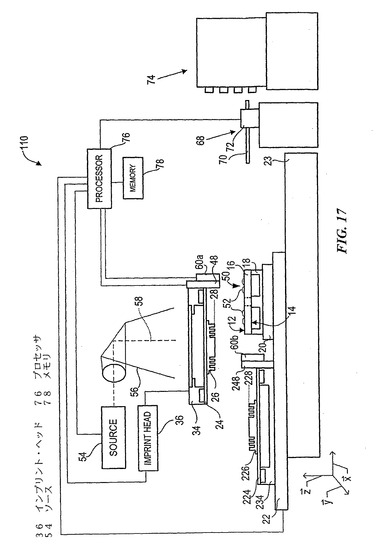
【0028】
図15と図17を参照して、ステップ304で、第1のステージ20と第2のステージ22は、所望の位置が、基板16と流体ディスペンサ48との間に得られるように基板16を並進させる。結果として、流体ディスペンサ48は、上述されたように基板16の第1の面12上にポリマー流体50を配置することができる。
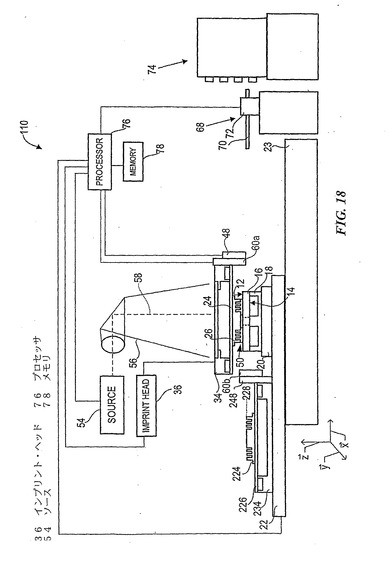
【0029】
図15と図18を参照すると、ステップ306で、所望の位置が、基板16とモールド26との間に得られる。より詳細には、第1のステージ20と第2のステージ22さらにインプリント・ヘッド36は、基板16がモールド26と重ね合わされるように、基板チャック18が位置決めされ、さらに基板16の第1の面12上に配置されるポリマー材料50は、基板16とモールド26との間に形成される所望の容積を満たす。ステップ308で、上述のように、基板16の第1の面12上に配置されるポリマー材料50は、基板16の第1の面12とモールド26のパターニング面28に一致して固化され及び/又は架橋される。ステップ310で、基板16は、基板16がモールド26に結合されるように基板チャック18から分離される。
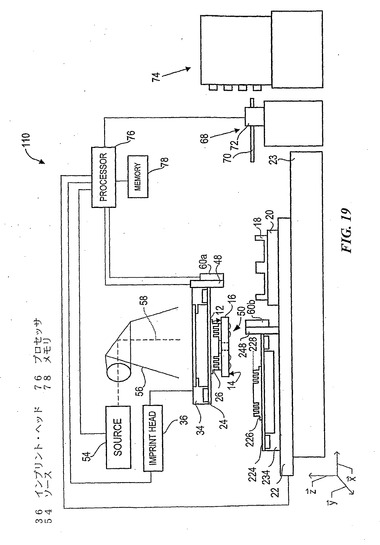
【0030】
図15と図19を参照すると、ステップ312で、第1のステージ20、又はさらなる実施形態において第1のステージ20と第2のステージ22は、所望の位置が、基板16と流体ディスペンサ248との間に得られるように、流体ディスペンサ248を並進させる。結果として、流体ディスペンサ248は、図17で示される基板16の第1の面12に対して上述された配置に類似して、基板16の第2の面14上にポリマー流体50を配置する。
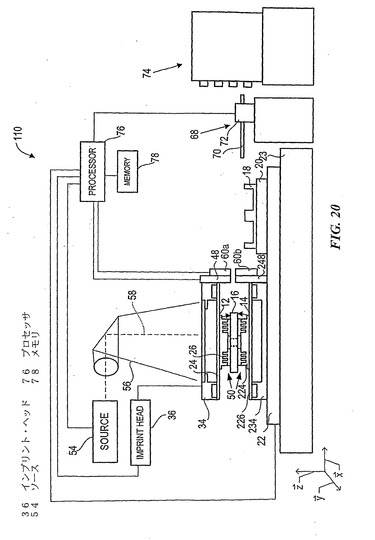
【0031】
図15と図20を参照すると、ステップ314で、所望の位置が、基板16とモールド226との間に得られる。より詳細には、第2のステージ22、又はさらなる実施形態において第1のステージ20と第2のステージ22、さらにインプリント・ヘッド26は、基板16と重ね合わされるようにモールド226を位置決めし、基板16の第2の面14上に配置されるポリマー材料50が、基板16とモールド226との間に形成される所望の容積を満たす。ステップ316で、上述のように、基板16の第2の面14上に配置されるポリマー材料50は、基板16の第2の面14とモールド226のパターニング面228に一致して固化され及び/又は架橋される。さらなる実施形態において、上述のステップ308は、基板16の第1の面12と第2の面14上に配置された材料50が、同時に固化され及び/又は架橋されるように、基板16が、上述の化学作用がある放射線に対して実質的に透明である場合には省略される。
【0032】
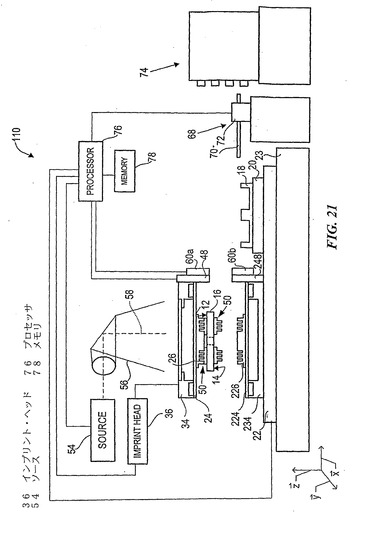
図15と図21を参照すると、ステップ318で、モールド226は、基板16がモールド26に結合されたままであるように、基板16の第2の面14上に配置されたポリマー材料50から分離される。ポリマー材料50からモールド226の分離を容易にするために、モールド226は、基板16に向かって弓状に曲げられ、一方、同時にインプリント・ヘッド36は、モールド226から離れる方向へモールド26を移動させる。
【0033】
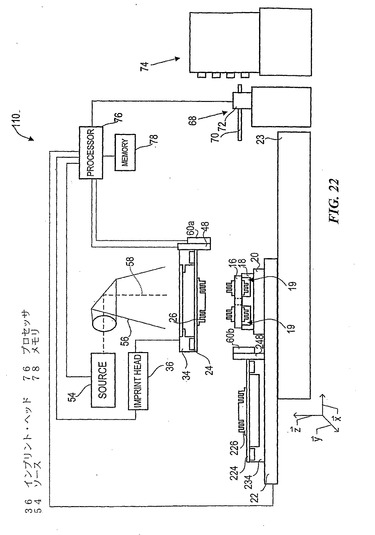
図15と図22を参照すると、ステップ320で、第1のステージ20と第2のステージ22さらにインプリント・ヘッド36は、基板チャック18が基板16と重ね合わされるように、基板チャック18を位置決めする。ステップ322で、モールド26は、基板16が基板チャック18上に配置されるように、基板16の第1の面12上に配置されたポリマー材料50から分離される。ポリマー材料50からモールド26の分離を容易にするために、モールド26は、基板16に向かって弓状に曲げられ、一方、同時にインプリント・ヘッド36は、基板16から離れる方向にモールド26を移動させる。基板16の第2の面14上に配置されたポリマー材料50は、ポリマー材料50に対する損傷を防げないにしても最小化するために、基板チャック18の空洞19内に配置される。ステップ324で、基板16は、基板チャック18から外され、ロボット68は、基板カセット74内に基板16を配置する。
【0034】
さらなる実施形態において、流体ディスペンサ48と248は、システム110の外側に配置されてもよく、基板16の第1の面12と第2の面14は、システム110の外側でその上に配置されたポリマー流体50を有する。さらに、ロボット68と/又は基板チャック18と接触する基板16の部分からポリマー流体50を取り除くことが望ましいことがある。
【0035】
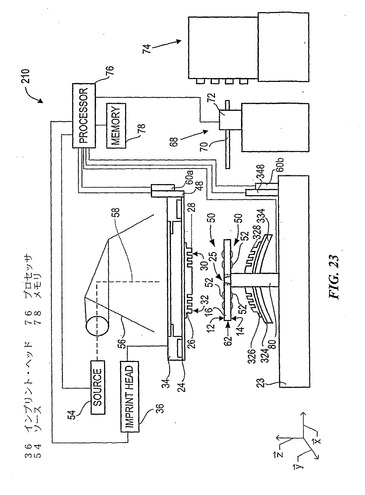
図23を参照すると、システム210として示される、システム10の第3の実施形態が記載される。システム210は、図1〜図7に関して上述されたシステム10に類似するが、システム210は、以下にさらに記載される追加のパターニング面と基板16を保持するためにピン80をさらに備える。
【0036】
システム210は、テンプレート24に向かって広がっているモールド326を有するテンプレート324をさらに備える。テンプレート324は、テンプレート・チャック334に結合されている。テンプレート324、モールド326、テンプレート・チャック334は、図1に関して上述されたそれぞれテンプレート24、モールド26、テンプレート・チャック34に類似する。モールド326は、モールド26のパターニング面28と実質的に同一のパターニング面328を有するが、さらなる実施形態において、パターニング面328は、パターニング面28とは異なる。さらなる実施形態において、テンプレート・チャック324は、モールド326と重ねられるテンプレート・チャック324の領域にわたって2ミクロンから100ミクロンの範囲の湾曲を有する球状チャック・ユニットである。ピン80は、図1に関して上述されたように、第1の軸と第2の軸でテンプレート324とモールド326を移動させる。さらにピン80は、第1の軸と第2の軸に垂直な第3の軸に沿った、すなわちx軸に沿った動きを与える。例において、ピン80は、x軸とy軸の周りのほぼ50ミクロン〜200ミクロン、さらにz軸に沿ったほぼ2ミリメートルの動きを与える。
【0037】
システム210は、さらに流体ディスペンサ348を備え、流体ディスペンサ348は、図1に関して上述された流体ディスペンサ48に類似する。流体ディスペンサ348と撮像ユニット60bは、ベース26に結合されて示されているが、流体ディスペンサ348と撮像ユニット60bは、システム210の任意の部分に結合される。流体ディスペンサ348の制御は、流体ディスペンサ348とデータ通信するプロセッサ76によって調整される。
【0038】
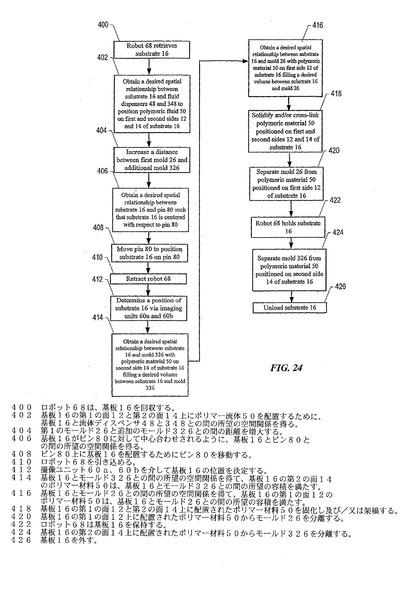
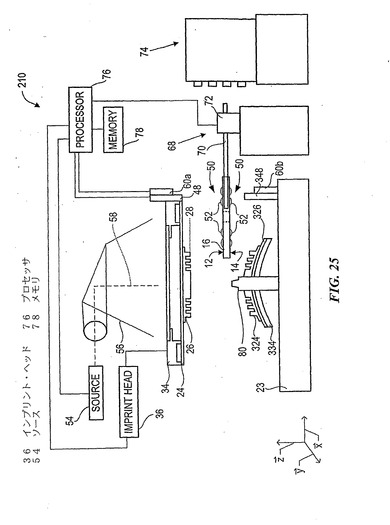
図24と図25を参照すると、基板16の第1の面12と第2の面14上にパターンを形成する方法及びシステムの第3の実施形態が示される。ステップ400で、ロボット68は、基板カセット74から基板16を回収し、ロボット68は基板16を保持する。ステップ402で、ロボット68は、基板16と流体ディスペンサ48、348との間に所望の空間関係が得られ、基板16上にポリマー流体を配置できるように基板16を配置する。より詳細に、流体ディスペンサ48は、基板16の第1の面12上にポリマー流体50を配置することができ、流体ディスペンサ348は、基板16の第2の面14上にポリマー流体50を配置する。さらなる実施形態において、流体ディスペンサ48、348は、システム210の外側に配置され、基板16の第1の面12と第2の面14は、システム210の外側でその上に配置されたポリマー流体50を有する。ステップ404で、モールド26とモールド326との間の距離は、基板16がモールド26とモールド326との間に配置されるように増大される。図示を簡略性のために、プロセッサ76と、撮像ユニット60b、ピン80、流体ディスペンサ348との間の結合は示されないことに留意されたい。
【0039】
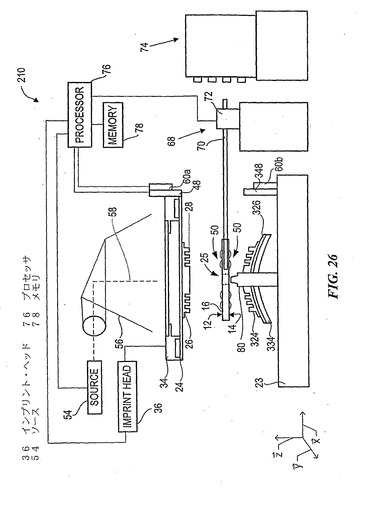
図24と図26を参照して、ステップ406で、ロボット68は、基板16を並進させ、ピン80は、基板16とピン80との間に所望の空間関係が得られるように並進させられる。結果として、基板16は、ピン80に対して中心合わせされる。より詳細には、スルーウェイ25は、ピン80に重ね合わされる。しかしながら、さらなる実施形態において、基板16とピン80との間に任意の所望の空間関係が得られる。
【0040】
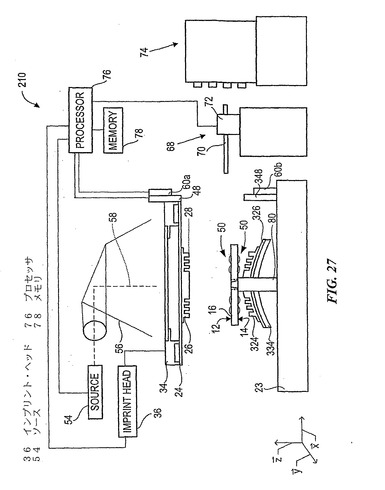
図24と図27を参照すると、ステップ408で、ピン80は、基板16がピン80上に配置されるように、z軸に沿って並進させられる。ステップ410で、ロボット68は、基板16の保持から引き込まれる。より詳細に、ロボット68のアーム70は、図7に示されるエンド・エフェクタ73が基板16に結合されないように、引き込まれる。ステップ412で、撮像ユニット60aは、基板16の位置を決定する。より詳細に、撮像ユニット60aは、システム10の任意の部品、すなわちモールド26、モールド326、又はロボット68に対して、図5、図6に関して上述されたように基板16の中心位置を決定するために用いられる。結果として、さらに以下に記載される、システム10の任意の部品に関する基板16の所望の空間関係が得られる。
【0041】
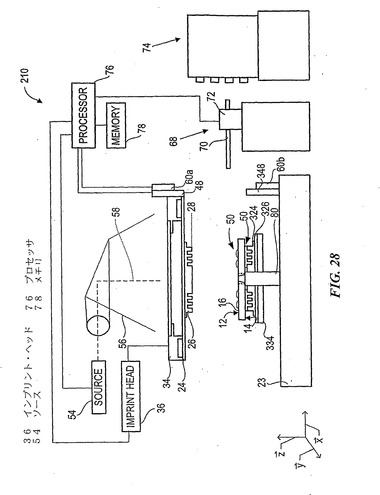
図24と図28を参照すると、ステップ414で、所望の位置が、基板16とモールド326との間で得られる。より詳細に、ピン80とチャック334は、基板16がモールド326と重ね合わされるように、基板16とモールド326を配置することができ、かつ基板16の第2の面14上に配置されたさらなるポリマー材料50が、基板16とモールド326との間に形成される所望の容積を満たす。
【0042】
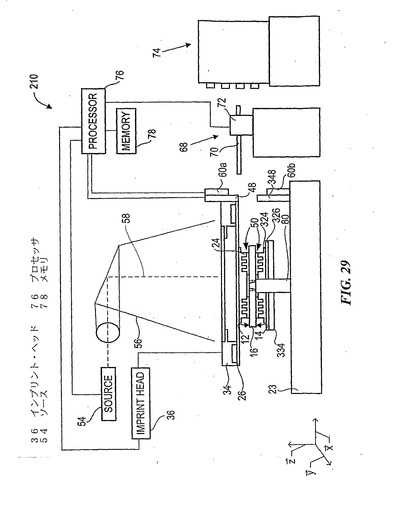
図24と図29を参照すると、ステップ416で、所望の位置が、基板16とモールド26との間に得られる。より詳細には、ピン80とインプリント・ヘッド36は、基板16がモールド26と重ね合わされるように、基板16とモールド26を配置することができ、基板16の第1の面12上に配置されるさらなるポリマー材料50は、基板16とモールド26との間に形成される所望の容積を満たす。ステップ418で、上述のように、基板16の第1の面12上に配置されるポリマー材料50は、基板16の第1の面12とモールド26のパターニング面28に一致して固化され及び/又は架橋され、基板16の第2の面14上に配置されるポリマー材料50は、基板16の第2の面14とモールド326のパターニング面328に一致して固化され及び/又は架橋される。
【0043】
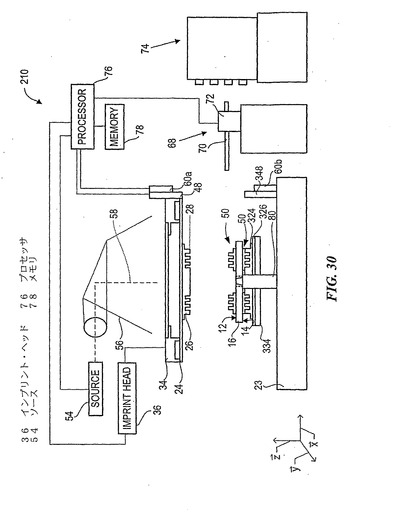
図24と図30を参照して、ステップ420で、モールド26は、基板16の第1の面12上に配置されるポリマー材料50から分離される。さらに、ロボット68及び/又はピン80と接触する基板16の部分からポリマー材料50を取り除くことが望ましい。
【0044】
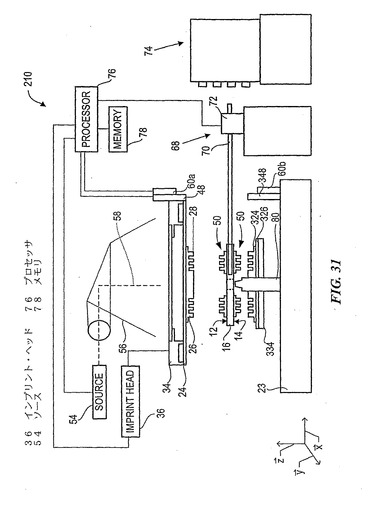
図24と図31を参照して、ステップ422で、ロボット68は、アーム70の、図7に示されるエンド・エフェクタ73が基板16を保持するように、基板16を回収する。ステップ424で、モールド326は、基板16がロボット68に結合されるように、基板16の第2の面14上に配置されるポリマー材料50から分離される。ステップ426で、基板16は、基板チャック18から外され、ロボット68は、基板カセット74内に基板16を配置される。
【0045】
上述された本発明の実施形態は例示的である。多くの変化及び修正が、上に引用された開示に対して行われるが、本発明の範囲内に留まる。したがって、本発明の範囲は、上記記載によって制限されるべきではなく、代わりに、それらの完全な等価物の範囲に加えて添付の特許請求の範囲を参照して決定されるべきである。
【図面の簡単な説明】
【0046】
【図1】第1と第2の両面を有する基板から離間したテンプレートを有するリソグラフィ・システムの簡略化された面図である。
【図2】図1に示されるテンプレートの上方から下方への図である。
【図3】図1に示されるテンプレートの面図である。
【図4】テンプレートが位置合わせマークを有する、図2の一部の拡大図である。
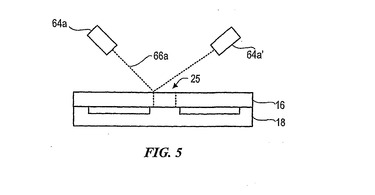
【図5】図1に示される基板、及び基板を検出する光学検出システムの面図である。
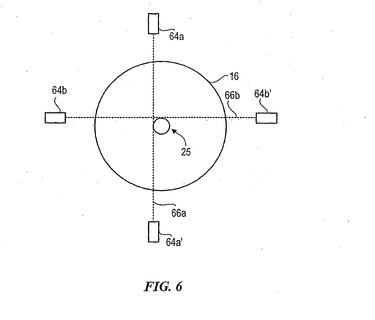
【図6】図1に示される基板、及び基板を検出する光学検出システムの上方から下方への図である。
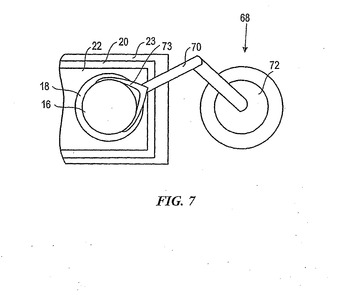
【図7】図1に示される基板を扱うロボットの上方から下方への図である。
【図8】第1の実施形態において、図1に示される基板の第1と第2の両面をパターニングする方法を示す流れ図である。
【図9】ロボットが第1の位置に基板チャック上に基板を配置する、図1に示されるシステムの面図である。
【図10】基板がその第1の面に配置された材料を有する、図9に示されるシステムの面図である。
【図11】テンプレートが基板の第1の面に配置された流体と接触する、図10に示されるシステムの面図である。
【図12】ロボットが第2の位置に基板チャック上の基板を配置する、図11に示されるシステムの面図である。
【図13】テンプレートが基板の第2の面に配置された流体と接触する、図12に示されるシステムの面図である。
【図14】さらなる実施形態において、第2のテンプレートと対向する第1のテンプレートと、第1と第2の両面を有する基板とを有するリソグラフィ・システムの面図である。
【図15】さらなる実施形態において、図14に示される基板の第1と第2の両面をパターニングする方法を示す流れ図である。
【図16】ロボットが第1の位置に基板チャック上に基板を配置する、図14に示されるシステムの面図である。
【図17】基板がその第1の面に配置された材料を有する、図16に示されるシステムの面図である。
【図18】第1のテンプレートが基板の第1の面に配置された流体と接触する、図17に示されるシステムの面図である。
【図19】基板が第1のテンプレートに結合され、かつ基板がその第2の面に配置された材料を有する、図18に示されるシステムの面図である。
【図20】第2のテンプレートが基板の第2の面に配置された流体と接触する、図19に示されるシステムの面図である。
【図21】第2のテンプレートが基板から離間される、図20に示されるシステムの面図である。
【図22】基板がその第1と第2の面に形成されたパターンを有する基板チャック上に配置される、図21に示されるシステムの面図である。
【図23】さらなる実施形態において、第2のテンプレートと対向する第1のテンプレートと、第1と第2の両面を有する基板とを有するリソグラフィ・システムの面図である。
【図24】さらなる実施形態において、図23に示される基板の第1と第2の両面をパターニングする方法を示す流れ図である。
【図25】基板がその第1と第2の面に配置された材料を有する、図23に示されるシステムの面図である。
【図26】基板がピンとの望ましい空間関係にある、図25に示されるシステムの面図である。
【図27】基板がピン上に配置された、図26に示されるシステムの面図である。
【図28】第2のテンプレートが基板の第2の面に配置された流体と接触する、図27に示されるシステムの面図である。
【図29】第1のテンプレートが基板の第1の面に配置された流体と接触する、図28に示されるシステムの面図である。
【図30】第1のテンプレートが基板から離間される、図29に示されるシステムの面図である。
【図31】第1と第2のテンプレートが基板から離間される、図30に示されるシステムの面図である。
【関連出願】
【0001】
(関連出願の相互引用)
本出願は、その全体が参照によって本明細書に組み込まれる、名称「Apparatus for and Method for Imprinting,Aligning,and Separation for Double Side Imprinting」の2005年12月8日に出願された、米国特許仮出願第60/748430号に対する優先権を主張する。
【技術分野】
【0002】
本発明の分野は、一般に構造のナノ製造に関する。より詳細には、本発明は、基板の両面パターニングの方法及びシステムを対象とする。
【背景技術】
【0003】
ナノ製造は、例えば数ナノメートル以下の程度のフューチャを有する、非常に小さい構造の製造を含む。ナノ製造が相当な影響を有する1つの領域は集積回路の処理である。半導体処理工業は、基板上に形成される単位面積当たりの回路を増大しながら、より大きな製造歩留まりに関する努力を続けているので、ナノ製造はますます重要になっている。ナノ製造は、形成された構造の最小フューチャ寸法のさらなる低減を可能にしながら、より大きなプロセス制御を与える。ナノ製造が用いられる開発の他の領域は、生物工学、光学技術、機械システムなどを含む。
【0004】
ナノ製造技術の一例は、一般にインプリント・リソグラフィと呼ばれる。例示的なインプリント・リソグラフィ・プロセスは、すべて本発明の譲渡者に譲渡された、名称「Method and a Mold to Arrange Features on a Substrate to Replicate Features having Minimal Dimensional Variability」の米国特許出願第10/264960号として出願された、米国特許出願公開第2004/0065976号、名称「Method of Forming a Layer on a Substrate to Facilitate Fabrication of Metrology Standards」の米国特許出願第10/264926号として出願された、米国特許出願公開第2004/0065252号、名称「Functional Patterning Material for Imprint Lithography Processes」の米国特許第6936194号などの多くの刊行物に詳細に記載されている。
【0005】
前述の各米国特許出願公開や米国特許に開示されるインプリント・リソグラフィ技術は、ポリマー化可能な層内のレリーフ・パターンの形成、及び下にある基板へのレリーフ・パターンに対応するパターンの転写を含む。基板は、そのパターニングを容易にするように所望の位置を得るために、移動ステージ上に配置される。このために、テンプレートが、テンプレートと基板との間に存在する成形可能液体を有する基板から離して用いられる。液体は、固化された層を形成するように固化され、固化された層は、それに記録されたパターンを有し、記録されたパターンは、液体と接触するテンプレートの表面の形状に一致する。テンプレートは、次に、テンプレートが基板から離れるようにように、固化された層から分離させられる。基板と固化された層は、次に、固化された層内のパターンに対応するレリーフ画像を基板に転写するためのプロセスを受ける。
【発明の開示】
【発明が解決しようとする課題】
【0006】
いくつかの応用において、基板の第1と第2の両面にレリーフ・パターンを形成することが望ましい。基板の第1と第2の両面にパターンを形成する、すなわち両面パターニングは、パターン化媒体インプリントの分野で有用である。このために、基板の両面パターニングの方法及びシステムを提供する必要性が存在する。
【発明を実施するための最良の形態】
【0007】
図1を参照すると、基板16の第1の面12と第2の面14上にレリーフ・パターンを形成するためのシステム10が示される。一例において、基板16には、実質的に位置合わせマークがなくてもよい。基板16は、基板チャック18に結合され、基板チャック18は、真空や電磁を含むがそれらに制限されない任意のチャックである。基板チャック18は、基板16に面する空洞19を備えることができる。基板16と基板チャック18は、第1のステージ20と第2のステージ22上で支持され、第1のステージ20は、基板チャック18と第2のステージ22との間に配置される。さらに第1のステージ20と第2のステージ22は、ベース23上に配置される。第1のステージ20は、第1の軸の周りに移動でき、一方、第2のステージ22は、第1の軸に対して垂直である第2の軸の周りに移動できる。すなわち、第1の軸はx軸で、第2の軸はy軸である。本発明における例示的なステージは、California IrvineのNewport Corporationから、部品番号XM2000で入手できる。基板16は、基板16の第1の面12に開口27を有し、基板16の第2の面14に開口29を有するスルーウェイ25をさらに備えている。しかしながら、さらなる実施形態において、基板16には、実質的にスルーウェイ25がなくてもよい。
【0008】
その上にパターニング面28を有し、基板16に向かって広がっているメサ26を有するテンプレート24が、基板16から離れている。メサ26は、モールド26と呼ばれることもある。しかしながら、さらなる実施形態において、テンプレート24には、実質的にモールド26がなくてもよい。テンプレート24及び/又はモールド26は、溶融シリカ、水晶、シリコン、有機ポリマー、シロキサン・ポリマー、ホイケイ酸ガラス、フルオロカーボン・ポリマー、金属、硬化サファイヤを含むがそれらに限定されない材料から形成される。示されるようにパターニング面28は、複数の離間された凹部30と突出部32によって形成されるフューチャを備える。しかしながら、さらなる実施形態において、パターニング面28は、実質的に平滑かつ/又は平坦であってもよい。パターニング面28は、独創的なパターンを形成することができ、独創的なパターンは、以下でさらに記載される基板16の第1の面12と第2の面14に形成されるパターンの基礎を形成する。テンプレート24は、テンプレート・チャック34に結合されれる。テンプレート・チャック34は、真空や電磁を含むがこれらに制限されない任意のチャックである。さらにテンプレート・チャック34は、テンプレート24とモールド26の移動を容易にするためにインプリント・ヘッド36に結合される。
【0009】
図2、図3を参照すると、テンプレート24の上方から下方への図が示される。示されるように、テンプレート24は円形形状である。しかしながら、さらなる実施形態において、テンプレート24は、所望の任意の幾何形状を備えることができる。さらにテンプレート24は、第1の領域38、第2の領域40、第3の領域42を備え、第2の領域40は、第1の領域38と第3の領域42との間に配置される。第2の領域40は、能動領域40と称されることもある。さらに示されるように、第3の領域42は、テンプレート24の中心に配置されるが、さらなる実施形態において、第3の領域42は、望ましいテンプレート24の任意の位置に配置できる。図1に示されるモールド26は、能動領域40に重ね合わされる。能動領域40と第3の領域42は、高さh1を有する。一例において、高さh1は、5ミクロン〜15ミクロンの範囲である。さらなる実施形態において、能動領域40と第3の領域42の高さは異なることができる。さらに、能動領域40と第3の領域42との間に配置された凹部44が存在してもよい。
【0010】
図2、図4を参照すると、第3の領域42は、位置合わせマーク46を含む。一例において、位置合わせマーク46は、標準の汎用位置合わせターゲット(UAT)である。位置合わせマーク46は、図1に示されるテンプレート24と基板16との間の所望の空間関係を得るために用いられる。
【0011】
図1を参照すると、システム10は、さらに流体ディスペンサ48を備える。流体ディスペンサ48は、以下にさらに記載される、基板16上にポリマー材料50を配置するように基板16と流体連通される。示されるように流体ディスペンサ48は、テンプレート・チャック34に結合されるが、さらなる実施形態において、流体ディスペンサ48は、システム10の任意の部品、すなわちテンプレート24又はインプリント・ヘッド36に結合されるてもよい。さらにシステム10は、任意の数の流体ディスペンサを備えることができ、流体ディスペンサ48は、その内に複数のディスペンス・ユニットを備えることができる。ポリマー材料50は、例えば、ドロップ・ディスペンス、スピン・コーティング、浸漬コーティング、薄膜堆積、厚膜堆積、などの任意に知られている技術を使用して基板16上に配置される。示されるようにポリマー材料50は、複数の離間された液滴52として基板16上に配置される。
【0012】
システム10は、経路58に沿ってエネルギー56を向けるために結合されたエネルギー56のソース54をさらに備える。一例においてソース54は、液体ガイド又は紫外線ファイバ・ガイドのいずれかに結合される紫外線放射ランプである。本発明におけるエネルギーの例示的なソースは、Connecticut、TorringtonのDYMAX Corporationから、部品番号BlueWave(商標)200 Spot Lampの下で入手可能である。インプリント・ヘッド36及び第1と第2のステージ20、22は、モールド26と基板16それぞれが経路58と重ね合わせられかつ経路58内に配置されるように、構成される。インプリント・ヘッド36、第1のステージ20、第2のステージ22、又はそれらの組合せは、以下でさらに記載されるように、モールド26と基板16との間の距離を、それらの間にポリマー材料50によって満たされる所望の容積を形成するために、変更することができる。
【0013】
システム10は、撮像ユニット60a、60bを有する光学検出システムをさらに備える。示されるように、撮像ユニット60aは、流体ディスペンサ48に結合されているが、さらなる実施形態において、撮像ユニット60aは、システム10の任意の部品、すなわち、テンプレート24、テンプレート・チャック34、又はインプリント・ヘッド36に結合されてもよい。さらに示されるように、撮像ユニット60bは、第2のステージ22に結合されているが、さらなる実施形態において、撮像ユニット60bは、システム10の任意の部品、すなわち、基板チャック18又は第1のステージ20に結合されてもよい。さらに、システム10は、任意の数の撮像ユニット60a、60bを備えることができる。撮像ユニット60a、60bは、画像処理モジュール(図示されず)とデータ通信する顕微鏡である。さらなる実施形態において、撮像ユニット60a、60bは、レーザ縁部検出センサであってもよい。
【0014】
図1、図5、図6を参照すると、撮像ユニット60a、60bは、それぞれ基板16とモールド26を検出するために用いられる。より詳細には、撮像ユニットは、基板16の縁部62を検出する。さらなる実施形態において、図5、図6において、ここで、撮像ユニット64a、64a’、64b、64b’として示される撮像ユニット60aは、基板16の中心位置、すなわちx軸とy軸に関するスルーウェイ25を決定するために用いられる。より詳細には、撮像ユニット64a、64bは、それぞれビーム66a、66bを生成するレーザであり、撮像ユニット64a’、64b’は、それぞれビーム66a、66bを検出する強度センサである。示されるように、撮像ユニット64a、64a’、64b、64b’は、開口25を検出する。撮像ユニット64a、64bは、軸外れ又はスルー・ザ・テンプレートとして用いられる。本発明で用いられる例示的な強度センサは、New Jersey、Woodcliff LakeのKeyence、Inc.から部品番号LV−H37の下で入手可能である。
【0015】
図1と図7を参照すると、システム10は、基板チャック18上に基板16を配置し、かつ基板チャック18から基板16を取り外すためのロボット68をさらに備える。ロボット68は、当技術で知られている任意のハンドリング・ロボットでよい。一例においてロボット68は、駆動手段72に結合されたアーム70を備える。アーム70は、基板16を扱うためにそれに結合されたエンド・エフェクタ73をさらに有する。一例においてエンド・エフェクタ73は、上に配置されたポリマー材料50を有する基板16の領域、すなわち基板16の能動領域と接触することなく基板16を保持するためのエッジ・グリッピング又は薄い空気空洞チャックである。駆動手段72は、アーム70を拡張又は収縮し、アーム70をその軸の周りで回転させ、又はアーム70を水平方向に円で移動させ、又はアーム70の任意の所望の動きを与えることができる。駆動手段72は、上述の第1と第2の軸に対して動きを与えることができる。一例において、駆動手段72は、以下にさらに記載される、基板16をフリップするためにx軸の周りで回転することができる。駆動手段72は、その軸の周りで回転することもできる。さらにロボット68は、基板チャック18と基板カセット74との間に基板16を輸送することができる。基板カセット74は、その内に複数の基板16を備えることができる。
【0016】
図1を参照すると、典型的にポリマー材料50は、所望の容積がモールド26と基板16との間に形成される前に、基板16上に配置される。しかしながら、ポリマー材料50は、所望の容積が得られた後で容積を満たすことができる。所望の容積が、ポリマー材料50で満たされた後、ソース54は、エネルギー56、例えば広帯域紫外放射線を生成する。エネルギー56は、ポリマー材料50を、基板16の第1の面12とモールド26のパターニング面28の形状に一致させて固化させかつ/又は架橋させる。このプロセスの制御は、プロセッサ76によって調整され、プロセッサ76は、第1のステージ20と、第2のステージ22と、インプリント・ヘッド36と、流体ディスペンサ48と、ソース54と、撮像ユニット60a、60bと、ロボット68とデータ通信し、メモリ78内に格納されたコンピュータ可読プログラムで動作する。
【0017】
上述のように、システム10は、基板16の第1の面12上にパターンを形成するために用いられる。しかしながら、基板16の第1の面12と第2の面14の両方が、形成されたパターンを有するように、基板16の第2の面14上にパターンを形成することが望ましい。このために、基板16の第1の面12と第2の面14上にパターンを形成するシステム及び方法が、以下に記載される。
【0018】
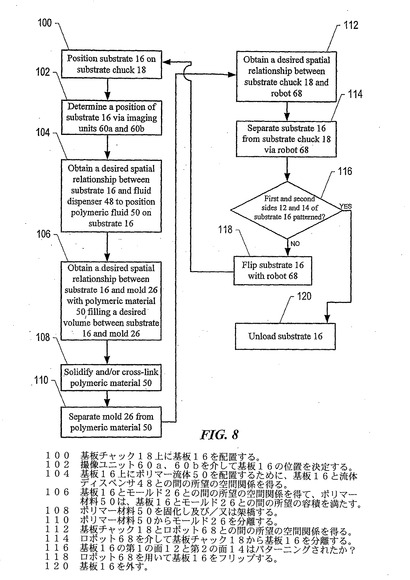
図8、図9を参照すると、第1の実施形態において、基板16の第1の面12と第2の面14上にパターンを形成するシステム及び方法が示される。上述のように、ステップ100で、基板16は、基板チャック18上に配置される。より詳細には、第1のステージ20と第2のステージ22は、ロボット68が、基板16を基板チャック18上に配置することができるように、ロボット68に近接して基板チャック18を位置決めする。ロボット68は、基板16を基板カセット74から移し、第1の面12と第2の面14の一面が、基板チャック18に対して配置されるように、基板16を基板チャック18上に配置する。第1の例において、ロボット68は、第1の面12が基板チャック18から離れて面し、一方、第2の面14が基板チャック18に向かうように、基板16を配置する。第2の例において、ロボット68は、第2の面14が基板チャック18から離れて面し、第1の面12が基板チャック18に向かうように、基板16を配置することができる。ステップ102で、撮像ユニット60aは、基板16の位置を決定する。より詳細には、撮像ユニット60aは、システム10の任意の部品、すなわちモールド18、ディスペンス・ユニット48、又はロボット68に対して、図5、図6に関して上述されたように、基板16の中心位置を決定するために用いられる。結果として、システム10の任意の部品に対する基板16の所望の空間関係を得ることができる。
【0019】
図8と図10を参照すると、ステップ104で、第1のステージ20と第2のステージ22は、所望の位置が、基板16と流体ディスペンサ48との間に得られるように、基板16を並進させる。結果として、流体ディスペンサ48が、上述のように基板16の第1の面12上にポリマー流体50を配置することができる。
【0020】
図8と図11を参照すると、ステップ106で、所望の位置が、基板16とモールド26との間で得られる。より詳細には、第1のステージ20と第2のステージ22とインプリント・ヘッド36は、基板16が、モールド26と重ね合わされるように、基板チャック18を位置決めし、かつさらなるポリマー材料50が、基板16とモールド26との間の形成された所望の容積を満たす。ステップ108で、上述のように、基板16の第1の面12上に配置されたポリマー材料50は、基板16の第1の面12とモールド26のパターニング面28に一致して固化されかつ/又は架橋される。ステップ110で、モールド26は、基板16の第1の面12上に配置されたポリマー材料50から分離される。
【0021】
図8と図12を参照して、ステップ112で、ステップ100に関する上述に類似して、第1のステージ20と第2のステージ22は、ロボット68に近接して基板チャック18を位置決めする。ステップ114で、ロボット68は、ロボット68を介して基板チャック18から基板16を分離する。ステップ116で、基板16は、基板16の第1の面12と第2の面14がパターニングされたかどうかを決定するために解析される。これによって、ステップ118で、基板16の第1の面12と第2の面14の一方の面だけがパターニングされているなら、ロボット68は、基板16の第1の面12と第2の面14の残るパターニングされていない面が、基板チャック18の反対側に配置されるように、基板16をモールド26に対して180°フリップするように、軸の周りでアーム70を回転し、かつ基板チャック18上に基板16を配置する。第1の例において、基板16の第1の面12がパターニングされるなら、第1の面12が基板チャック18に向かって面し、かつ第2の面14が基板チャック18から離れて面するように、ロボット68は、基板16を配置する。第2の例において、基板16の第2の面14がパターニングされているなら、第2の面14が基板チャック18に向かって面し、かつ第1の面12が基板チャック18から離れて面するように、ロボット68は、基板16を配置する。さらに、基板16の第1の面12と第2の面14の一面上でパターニングされたポリマー材料50は、ポリマー材料50に対する損傷を防げないにしても最小化するために、基板チャック18の空洞19内に配置される。このために、基板16の第1の面12と第2の面14の残る面は、図8〜図12における上述と類似してパターニングされ、基板16は、図13に示されるようにパターニングされた第1の面12と第2の面14を有する。
【0022】
図1、図8を参照すると、しかしながら、基板16の第1の面12と第2の面14の両方がパターニングされているなら、ステップ120で、基板16は、基板チャック18から外され、ロボット68は、基板カセット74内に基板16を配置する。さらなる実施形態において、流体ディスペンサ48は、システム10の外側に配置されてもよく、基板16の第1の面12と第2の面14は、システム10の外側でその上に配置されたポリマー流体50を有する。さらに、ロボット68及び/又は基板チャック18と接触する基板16の部分からポリマー流体50を取り除くことが望ましい。
【0023】
図14を参照すると、システム110として示されるように、システム10の第2の実施形態が記載される。システム110は、図1〜図7に関して上述されたシステム10に類似するが、システム110は、以下にさらに記載される追加のパターニング面を備えている。
【0024】
このために、システム110は、パターニング面228を有し、テンプレート24に向いて広がっているモールド226を有するテンプレート224をさらに備える。テンプレート224は、テンプレート・チャック234に結合される。テンプレート224、モールド226、テンプレート・チャック234は、図1に関して上述されたそれぞれテンプレート24、モールド26、テンプレート・チャック34に類似してい。モールド226は、モールド26のパターニング面28と実質的に同一のパターニング面228を有するが、さらなる実施形態において、パターニング面228は、パターニング面28とは異なることもできる。テンプレート224、モールド226、テンプレート・チャック234は、第2のステージ22に結合され、第2のステージ22は、図1に関して上述された第2の軸の周りのテンプレート224、モールド226、テンプレート・チャック234を移動させる。結果として、モールド226は、以下にさらに記載される基板16の第1の面12と第2の面14のパターニングを容易にするために、モールド26に重ね合って配置される。さらなる実施形態において、テンプレート224、モールド226、テンプレート・チャック234は、さらに第1のステージ20に結合される。
【0025】
システム110は、さらに流体ディスペンサ248を備え、流体ディスペンサ248は、図1に関して上述された流体ディスペンサ48に類似する。示されるように、流体ディスペンサ248は、テンプレート・チャック234に結合されるが、さらなる実施形態において、流体ディスペンサ248は、システム210の任意の部分、すなわちテンプレート224又は第2のステージ22に結合される。さらに、撮像ユニット60bは、流体ディスペンサ248に結合されて示されるが、さらなる実施形態において、撮像ユニット60bは、システム110の任意の部分、すなわち第2のステージ22、テンプレート224、又はテンプレート・チャック234に結合される。流体ディスペンサ248の制御は、流体ディスペンサ248とデータ通信するプロセッサ76によって調整される。
【0026】
図15と図16を参照すると、基板16の第1の面12と第2の面14上にパターンを形成する方法及びシステムの第2の実施形態が示される。上述のように、ステップ300で、基板16は、基板チャック18上に配置される。より詳細には、第1のステージ20と第2のステージ22は、ロボット68が基板チャック18上に基板16を配置することができるように、ロボット68の近位に基板チャック18を位置決めする。ロボット68は、基板カセット74から基板16を移送し、かつ第1の面12と第2の面14の一面が基板18を向いて配置されるように、基板16を基板チャック18上に配置する。図示を簡略性のために、プロセッサ76と、第1のステージ20、撮像ユニット60b、流体ディスペンサ248との間の結合は示されていないことに留意されたい。
【0027】
ステップ302で、撮像ユニット60a、60bは、基板16の位置を決定する。より詳細には、撮像ユニット60a、60bは、図5、図6に関して上述されるように、システム10の任意の部品に対して、すなわちモールド26、226、ディスペンス・ユニット48、248、又はロボット68に対して、基板16の中心位置を決定するために用いられる。結果として、さらに以下に記載される、システム10の任意の部品に対する基板16の所望の空間関係が得られる。
【0028】
図15と図17を参照して、ステップ304で、第1のステージ20と第2のステージ22は、所望の位置が、基板16と流体ディスペンサ48との間に得られるように基板16を並進させる。結果として、流体ディスペンサ48は、上述されたように基板16の第1の面12上にポリマー流体50を配置することができる。
【0029】
図15と図18を参照すると、ステップ306で、所望の位置が、基板16とモールド26との間に得られる。より詳細には、第1のステージ20と第2のステージ22さらにインプリント・ヘッド36は、基板16がモールド26と重ね合わされるように、基板チャック18が位置決めされ、さらに基板16の第1の面12上に配置されるポリマー材料50は、基板16とモールド26との間に形成される所望の容積を満たす。ステップ308で、上述のように、基板16の第1の面12上に配置されるポリマー材料50は、基板16の第1の面12とモールド26のパターニング面28に一致して固化され及び/又は架橋される。ステップ310で、基板16は、基板16がモールド26に結合されるように基板チャック18から分離される。
【0030】
図15と図19を参照すると、ステップ312で、第1のステージ20、又はさらなる実施形態において第1のステージ20と第2のステージ22は、所望の位置が、基板16と流体ディスペンサ248との間に得られるように、流体ディスペンサ248を並進させる。結果として、流体ディスペンサ248は、図17で示される基板16の第1の面12に対して上述された配置に類似して、基板16の第2の面14上にポリマー流体50を配置する。
【0031】
図15と図20を参照すると、ステップ314で、所望の位置が、基板16とモールド226との間に得られる。より詳細には、第2のステージ22、又はさらなる実施形態において第1のステージ20と第2のステージ22、さらにインプリント・ヘッド26は、基板16と重ね合わされるようにモールド226を位置決めし、基板16の第2の面14上に配置されるポリマー材料50が、基板16とモールド226との間に形成される所望の容積を満たす。ステップ316で、上述のように、基板16の第2の面14上に配置されるポリマー材料50は、基板16の第2の面14とモールド226のパターニング面228に一致して固化され及び/又は架橋される。さらなる実施形態において、上述のステップ308は、基板16の第1の面12と第2の面14上に配置された材料50が、同時に固化され及び/又は架橋されるように、基板16が、上述の化学作用がある放射線に対して実質的に透明である場合には省略される。
【0032】
図15と図21を参照すると、ステップ318で、モールド226は、基板16がモールド26に結合されたままであるように、基板16の第2の面14上に配置されたポリマー材料50から分離される。ポリマー材料50からモールド226の分離を容易にするために、モールド226は、基板16に向かって弓状に曲げられ、一方、同時にインプリント・ヘッド36は、モールド226から離れる方向へモールド26を移動させる。
【0033】
図15と図22を参照すると、ステップ320で、第1のステージ20と第2のステージ22さらにインプリント・ヘッド36は、基板チャック18が基板16と重ね合わされるように、基板チャック18を位置決めする。ステップ322で、モールド26は、基板16が基板チャック18上に配置されるように、基板16の第1の面12上に配置されたポリマー材料50から分離される。ポリマー材料50からモールド26の分離を容易にするために、モールド26は、基板16に向かって弓状に曲げられ、一方、同時にインプリント・ヘッド36は、基板16から離れる方向にモールド26を移動させる。基板16の第2の面14上に配置されたポリマー材料50は、ポリマー材料50に対する損傷を防げないにしても最小化するために、基板チャック18の空洞19内に配置される。ステップ324で、基板16は、基板チャック18から外され、ロボット68は、基板カセット74内に基板16を配置する。
【0034】
さらなる実施形態において、流体ディスペンサ48と248は、システム110の外側に配置されてもよく、基板16の第1の面12と第2の面14は、システム110の外側でその上に配置されたポリマー流体50を有する。さらに、ロボット68と/又は基板チャック18と接触する基板16の部分からポリマー流体50を取り除くことが望ましいことがある。
【0035】
図23を参照すると、システム210として示される、システム10の第3の実施形態が記載される。システム210は、図1〜図7に関して上述されたシステム10に類似するが、システム210は、以下にさらに記載される追加のパターニング面と基板16を保持するためにピン80をさらに備える。
【0036】
システム210は、テンプレート24に向かって広がっているモールド326を有するテンプレート324をさらに備える。テンプレート324は、テンプレート・チャック334に結合されている。テンプレート324、モールド326、テンプレート・チャック334は、図1に関して上述されたそれぞれテンプレート24、モールド26、テンプレート・チャック34に類似する。モールド326は、モールド26のパターニング面28と実質的に同一のパターニング面328を有するが、さらなる実施形態において、パターニング面328は、パターニング面28とは異なる。さらなる実施形態において、テンプレート・チャック324は、モールド326と重ねられるテンプレート・チャック324の領域にわたって2ミクロンから100ミクロンの範囲の湾曲を有する球状チャック・ユニットである。ピン80は、図1に関して上述されたように、第1の軸と第2の軸でテンプレート324とモールド326を移動させる。さらにピン80は、第1の軸と第2の軸に垂直な第3の軸に沿った、すなわちx軸に沿った動きを与える。例において、ピン80は、x軸とy軸の周りのほぼ50ミクロン〜200ミクロン、さらにz軸に沿ったほぼ2ミリメートルの動きを与える。
【0037】
システム210は、さらに流体ディスペンサ348を備え、流体ディスペンサ348は、図1に関して上述された流体ディスペンサ48に類似する。流体ディスペンサ348と撮像ユニット60bは、ベース26に結合されて示されているが、流体ディスペンサ348と撮像ユニット60bは、システム210の任意の部分に結合される。流体ディスペンサ348の制御は、流体ディスペンサ348とデータ通信するプロセッサ76によって調整される。
【0038】
図24と図25を参照すると、基板16の第1の面12と第2の面14上にパターンを形成する方法及びシステムの第3の実施形態が示される。ステップ400で、ロボット68は、基板カセット74から基板16を回収し、ロボット68は基板16を保持する。ステップ402で、ロボット68は、基板16と流体ディスペンサ48、348との間に所望の空間関係が得られ、基板16上にポリマー流体を配置できるように基板16を配置する。より詳細に、流体ディスペンサ48は、基板16の第1の面12上にポリマー流体50を配置することができ、流体ディスペンサ348は、基板16の第2の面14上にポリマー流体50を配置する。さらなる実施形態において、流体ディスペンサ48、348は、システム210の外側に配置され、基板16の第1の面12と第2の面14は、システム210の外側でその上に配置されたポリマー流体50を有する。ステップ404で、モールド26とモールド326との間の距離は、基板16がモールド26とモールド326との間に配置されるように増大される。図示を簡略性のために、プロセッサ76と、撮像ユニット60b、ピン80、流体ディスペンサ348との間の結合は示されないことに留意されたい。
【0039】
図24と図26を参照して、ステップ406で、ロボット68は、基板16を並進させ、ピン80は、基板16とピン80との間に所望の空間関係が得られるように並進させられる。結果として、基板16は、ピン80に対して中心合わせされる。より詳細には、スルーウェイ25は、ピン80に重ね合わされる。しかしながら、さらなる実施形態において、基板16とピン80との間に任意の所望の空間関係が得られる。
【0040】
図24と図27を参照すると、ステップ408で、ピン80は、基板16がピン80上に配置されるように、z軸に沿って並進させられる。ステップ410で、ロボット68は、基板16の保持から引き込まれる。より詳細に、ロボット68のアーム70は、図7に示されるエンド・エフェクタ73が基板16に結合されないように、引き込まれる。ステップ412で、撮像ユニット60aは、基板16の位置を決定する。より詳細に、撮像ユニット60aは、システム10の任意の部品、すなわちモールド26、モールド326、又はロボット68に対して、図5、図6に関して上述されたように基板16の中心位置を決定するために用いられる。結果として、さらに以下に記載される、システム10の任意の部品に関する基板16の所望の空間関係が得られる。
【0041】
図24と図28を参照すると、ステップ414で、所望の位置が、基板16とモールド326との間で得られる。より詳細に、ピン80とチャック334は、基板16がモールド326と重ね合わされるように、基板16とモールド326を配置することができ、かつ基板16の第2の面14上に配置されたさらなるポリマー材料50が、基板16とモールド326との間に形成される所望の容積を満たす。
【0042】
図24と図29を参照すると、ステップ416で、所望の位置が、基板16とモールド26との間に得られる。より詳細には、ピン80とインプリント・ヘッド36は、基板16がモールド26と重ね合わされるように、基板16とモールド26を配置することができ、基板16の第1の面12上に配置されるさらなるポリマー材料50は、基板16とモールド26との間に形成される所望の容積を満たす。ステップ418で、上述のように、基板16の第1の面12上に配置されるポリマー材料50は、基板16の第1の面12とモールド26のパターニング面28に一致して固化され及び/又は架橋され、基板16の第2の面14上に配置されるポリマー材料50は、基板16の第2の面14とモールド326のパターニング面328に一致して固化され及び/又は架橋される。
【0043】
図24と図30を参照して、ステップ420で、モールド26は、基板16の第1の面12上に配置されるポリマー材料50から分離される。さらに、ロボット68及び/又はピン80と接触する基板16の部分からポリマー材料50を取り除くことが望ましい。
【0044】
図24と図31を参照して、ステップ422で、ロボット68は、アーム70の、図7に示されるエンド・エフェクタ73が基板16を保持するように、基板16を回収する。ステップ424で、モールド326は、基板16がロボット68に結合されるように、基板16の第2の面14上に配置されるポリマー材料50から分離される。ステップ426で、基板16は、基板チャック18から外され、ロボット68は、基板カセット74内に基板16を配置される。
【0045】
上述された本発明の実施形態は例示的である。多くの変化及び修正が、上に引用された開示に対して行われるが、本発明の範囲内に留まる。したがって、本発明の範囲は、上記記載によって制限されるべきではなく、代わりに、それらの完全な等価物の範囲に加えて添付の特許請求の範囲を参照して決定されるべきである。
【図面の簡単な説明】
【0046】
【図1】第1と第2の両面を有する基板から離間したテンプレートを有するリソグラフィ・システムの簡略化された面図である。
【図2】図1に示されるテンプレートの上方から下方への図である。
【図3】図1に示されるテンプレートの面図である。
【図4】テンプレートが位置合わせマークを有する、図2の一部の拡大図である。
【図5】図1に示される基板、及び基板を検出する光学検出システムの面図である。
【図6】図1に示される基板、及び基板を検出する光学検出システムの上方から下方への図である。
【図7】図1に示される基板を扱うロボットの上方から下方への図である。
【図8】第1の実施形態において、図1に示される基板の第1と第2の両面をパターニングする方法を示す流れ図である。
【図9】ロボットが第1の位置に基板チャック上に基板を配置する、図1に示されるシステムの面図である。
【図10】基板がその第1の面に配置された材料を有する、図9に示されるシステムの面図である。
【図11】テンプレートが基板の第1の面に配置された流体と接触する、図10に示されるシステムの面図である。
【図12】ロボットが第2の位置に基板チャック上の基板を配置する、図11に示されるシステムの面図である。
【図13】テンプレートが基板の第2の面に配置された流体と接触する、図12に示されるシステムの面図である。
【図14】さらなる実施形態において、第2のテンプレートと対向する第1のテンプレートと、第1と第2の両面を有する基板とを有するリソグラフィ・システムの面図である。
【図15】さらなる実施形態において、図14に示される基板の第1と第2の両面をパターニングする方法を示す流れ図である。
【図16】ロボットが第1の位置に基板チャック上に基板を配置する、図14に示されるシステムの面図である。
【図17】基板がその第1の面に配置された材料を有する、図16に示されるシステムの面図である。
【図18】第1のテンプレートが基板の第1の面に配置された流体と接触する、図17に示されるシステムの面図である。
【図19】基板が第1のテンプレートに結合され、かつ基板がその第2の面に配置された材料を有する、図18に示されるシステムの面図である。
【図20】第2のテンプレートが基板の第2の面に配置された流体と接触する、図19に示されるシステムの面図である。
【図21】第2のテンプレートが基板から離間される、図20に示されるシステムの面図である。
【図22】基板がその第1と第2の面に形成されたパターンを有する基板チャック上に配置される、図21に示されるシステムの面図である。
【図23】さらなる実施形態において、第2のテンプレートと対向する第1のテンプレートと、第1と第2の両面を有する基板とを有するリソグラフィ・システムの面図である。
【図24】さらなる実施形態において、図23に示される基板の第1と第2の両面をパターニングする方法を示す流れ図である。
【図25】基板がその第1と第2の面に配置された材料を有する、図23に示されるシステムの面図である。
【図26】基板がピンとの望ましい空間関係にある、図25に示されるシステムの面図である。
【図27】基板がピン上に配置された、図26に示されるシステムの面図である。
【図28】第2のテンプレートが基板の第2の面に配置された流体と接触する、図27に示されるシステムの面図である。
【図29】第1のテンプレートが基板の第1の面に配置された流体と接触する、図28に示されるシステムの面図である。
【図30】第1のテンプレートが基板から離間される、図29に示されるシステムの面図である。
【図31】第1と第2のテンプレートが基板から離間される、図30に示されるシステムの面図である。
【特許請求の範囲】
【請求項1】
モールド・アセンブリを用いて、第1と第2の両面を有する基板をパターニングする方法であって、
前記基板の前記第1の面が前記モールド・アセンブリと重なり合うように、前記基板と前記モールド・アセンブリとの間に第1の空間関係を得るステップであって、前記モールド・アセンブリ及び前記基板の前記第1の面は、その間に配置された材料を有する、ステップと、
前記モールド・アセンブリを用いて前記基板の前記第1の面上の前記材料にパターンを形成して、第1のパターン化層を形成するステップと、
前記基板の前記第2の面が前記モールド・アセンブリと重なり合うように、前記基板と前記モールド・アセンブリとの間に、前記第1の空間関係とは異なる第2の空間関係を得るステップであって、前記モールド・アセンブリ及び前記基板の前記第2の面は、その間に配置された材料を有する、ステップと、
前記モールド・アセンブリを用いて前記基板の前記第2の面上の前記材料にパターンを形成して、第2のパターン化層を形成するステップとを含む方法。
【請求項2】
前記第2の空間関係を得る前記ステップは、前記基板をフリッピングするステップをさらに含む請求項1に記載の方法。
【請求項3】
前記第2の空間関係を得る前記ステップは、前記モールド・アセンブリに対して前記基板を180度フリッピングするステップをさらに含む請求項1に記載の方法。
【請求項4】
第1と第2の両面を有する基板をパターニングする方法であって、
前記基板の前記第1の面に材料を配置するステップと、
前記基板の前記第1の面が第1のモールド・アセンブリと重なり合うように、前記基板と前記第1のモールド・アセンブリとの間に第1の空間関係を得るステップと、
前記第1のモールド・アセンブリを用いて前記基板の前記第1の面上の前記材料にパターンを形成して、第1のパターン化層を形成するステップと、
前記基板の前記第2の面に材料を配置するステップと、
前記基板の前記第2の面が第2のモールド・アセンブリと重なり合うように、前記基板と前記第2のモールド・アセンブリとの間に前記第1の空間関係とは異なる第2の空間関係を得るステップと、
前記第2のモールド・アセンブリを用いて前記基板の前記第2の面上の前記材料にパターンを形成して、第2のパターン化層を形成するステップとを含む方法。
【請求項5】
前記基板の前記第1の面の前記材料に前記パターンを形成するステップは、前記材料が、前記基板の前記第2の面に配置されるように、前記基板を前記第1のモールド・アセンブリに結合するステップをさらに含む請求項4に記載の方法。
【請求項6】
第1と第2の両面を有する基板をパターニングするシステムであって、
モールド・アセンブリと、
前記基板を前記モールド・アセンブリに対して第1と第2の位置に交互に配置し、前記モールド・アセンブリが、前記基板の向かい合わせられた側の第1の面上に配置された材料と接触して第1のパターン化層を形成し、かつ前記基板の側の第2の面上に配置された材料とさらに接触して第2のパターン化層を形成するように、前記基板に結合されるロボットと
を備えるシステム。
【請求項7】
第1と第2の向かい合わせられた流体ディスペンサをさらに含み、前記第1の流体ディスペンサは、前記材料を前記基板の前記第1の面上に配置し、かつ記第2の流体ディスペンサは、前記材料を前記基板の前記第2の面上に配置する請求項6に記載のシステム。
【請求項8】
前記モールド・アセンブリと前記基板との間の空間関係を決定するための光学検出システムをさらに含む請求項6に記載のシステム。
【請求項9】
前記ロボットは、さらに前記モールド・アセンブリに対して前記基板を180度フリップする請求項6に記載のシステム。
【請求項10】
第1と第2の両面を有する基板をパターニングするシステムであって、
第1のモールド・アセンブリと、
前記第1のモールド・アセンブリとは向かい合わせに配置された第2のモールド・アセンブリと、
前記基板を前記第1と第2のモールド・アセンブリに対して第1と第2の位置に交互に配置する並進ステージとを備え、前記第1の位置において、前記第1のモールド・アセンブリは、前記基板の前記第1の面上に配置された材料と接触し、かつ前記第2の位置において、前記第2のモールド・アセンブリは、前記基板の前記第2の面上に配置された材料と接触するシステム。
【請求項11】
第1と第2の向かい合わせられた流体ディスペンサをさらに含み、前記第1の流体ディスペンサは、前記材料を前記基板の前記第1の面上に配置し、かつ記第2の流体ディスペンサは、前記材料を前記基板の前記第2の面上に配置する請求項10に記載のシステム。
【請求項12】
前記モールド・アセンブリと前記基板との間の空間関係を決定するための光学検出システムをさらに含む請求項10に記載のシステム。
【請求項13】
前記ロボットは、さらに前記モールド・アセンブリに対して前記基板を180度フリップする請求項10に記載のシステム。
【請求項1】
モールド・アセンブリを用いて、第1と第2の両面を有する基板をパターニングする方法であって、
前記基板の前記第1の面が前記モールド・アセンブリと重なり合うように、前記基板と前記モールド・アセンブリとの間に第1の空間関係を得るステップであって、前記モールド・アセンブリ及び前記基板の前記第1の面は、その間に配置された材料を有する、ステップと、
前記モールド・アセンブリを用いて前記基板の前記第1の面上の前記材料にパターンを形成して、第1のパターン化層を形成するステップと、
前記基板の前記第2の面が前記モールド・アセンブリと重なり合うように、前記基板と前記モールド・アセンブリとの間に、前記第1の空間関係とは異なる第2の空間関係を得るステップであって、前記モールド・アセンブリ及び前記基板の前記第2の面は、その間に配置された材料を有する、ステップと、
前記モールド・アセンブリを用いて前記基板の前記第2の面上の前記材料にパターンを形成して、第2のパターン化層を形成するステップとを含む方法。
【請求項2】
前記第2の空間関係を得る前記ステップは、前記基板をフリッピングするステップをさらに含む請求項1に記載の方法。
【請求項3】
前記第2の空間関係を得る前記ステップは、前記モールド・アセンブリに対して前記基板を180度フリッピングするステップをさらに含む請求項1に記載の方法。
【請求項4】
第1と第2の両面を有する基板をパターニングする方法であって、
前記基板の前記第1の面に材料を配置するステップと、
前記基板の前記第1の面が第1のモールド・アセンブリと重なり合うように、前記基板と前記第1のモールド・アセンブリとの間に第1の空間関係を得るステップと、
前記第1のモールド・アセンブリを用いて前記基板の前記第1の面上の前記材料にパターンを形成して、第1のパターン化層を形成するステップと、
前記基板の前記第2の面に材料を配置するステップと、
前記基板の前記第2の面が第2のモールド・アセンブリと重なり合うように、前記基板と前記第2のモールド・アセンブリとの間に前記第1の空間関係とは異なる第2の空間関係を得るステップと、
前記第2のモールド・アセンブリを用いて前記基板の前記第2の面上の前記材料にパターンを形成して、第2のパターン化層を形成するステップとを含む方法。
【請求項5】
前記基板の前記第1の面の前記材料に前記パターンを形成するステップは、前記材料が、前記基板の前記第2の面に配置されるように、前記基板を前記第1のモールド・アセンブリに結合するステップをさらに含む請求項4に記載の方法。
【請求項6】
第1と第2の両面を有する基板をパターニングするシステムであって、
モールド・アセンブリと、
前記基板を前記モールド・アセンブリに対して第1と第2の位置に交互に配置し、前記モールド・アセンブリが、前記基板の向かい合わせられた側の第1の面上に配置された材料と接触して第1のパターン化層を形成し、かつ前記基板の側の第2の面上に配置された材料とさらに接触して第2のパターン化層を形成するように、前記基板に結合されるロボットと
を備えるシステム。
【請求項7】
第1と第2の向かい合わせられた流体ディスペンサをさらに含み、前記第1の流体ディスペンサは、前記材料を前記基板の前記第1の面上に配置し、かつ記第2の流体ディスペンサは、前記材料を前記基板の前記第2の面上に配置する請求項6に記載のシステム。
【請求項8】
前記モールド・アセンブリと前記基板との間の空間関係を決定するための光学検出システムをさらに含む請求項6に記載のシステム。
【請求項9】
前記ロボットは、さらに前記モールド・アセンブリに対して前記基板を180度フリップする請求項6に記載のシステム。
【請求項10】
第1と第2の両面を有する基板をパターニングするシステムであって、
第1のモールド・アセンブリと、
前記第1のモールド・アセンブリとは向かい合わせに配置された第2のモールド・アセンブリと、
前記基板を前記第1と第2のモールド・アセンブリに対して第1と第2の位置に交互に配置する並進ステージとを備え、前記第1の位置において、前記第1のモールド・アセンブリは、前記基板の前記第1の面上に配置された材料と接触し、かつ前記第2の位置において、前記第2のモールド・アセンブリは、前記基板の前記第2の面上に配置された材料と接触するシステム。
【請求項11】
第1と第2の向かい合わせられた流体ディスペンサをさらに含み、前記第1の流体ディスペンサは、前記材料を前記基板の前記第1の面上に配置し、かつ記第2の流体ディスペンサは、前記材料を前記基板の前記第2の面上に配置する請求項10に記載のシステム。
【請求項12】
前記モールド・アセンブリと前記基板との間の空間関係を決定するための光学検出システムをさらに含む請求項10に記載のシステム。
【請求項13】
前記ロボットは、さらに前記モールド・アセンブリに対して前記基板を180度フリップする請求項10に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【公表番号】特表2009−518863(P2009−518863A)
【公表日】平成21年5月7日(2009.5.7)
【国際特許分類】
【出願番号】特願2008−544418(P2008−544418)
【出願日】平成18年11月30日(2006.11.30)
【国際出願番号】PCT/US2006/046256
【国際公開番号】WO2007/067488
【国際公開日】平成19年6月14日(2007.6.14)
【出願人】(503193362)モレキュラー・インプリンツ・インコーポレーテッド (94)
【Fターム(参考)】
【公表日】平成21年5月7日(2009.5.7)
【国際特許分類】
【出願日】平成18年11月30日(2006.11.30)
【国際出願番号】PCT/US2006/046256
【国際公開番号】WO2007/067488
【国際公開日】平成19年6月14日(2007.6.14)
【出願人】(503193362)モレキュラー・インプリンツ・インコーポレーテッド (94)
【Fターム(参考)】
[ Back to top ]