
基板処理ユニット、基板搬送方法、基板洗浄処理ユニット及び基板めっき装置
ロボットアーム等の基板搬入機構を基板の搬入後速やかに基板の把持から解放し、基板を保持する時間を短縮し、スループットを向上させることができる基板処理ユニット、基板搬送方法、基板洗浄処理ユニットおよび基板めっき装置を提供する。基板11を所定の保持位置に保持する基板保持機構10と該基板保持機構で保持された基板に所定の処理を施す処理機構32を備えた基板処理ユニットにおいて、基板を保持位置近傍に案内するガイドピン15を具備する基板ガイド機構20を設け、基板保持機構は基板の保持位置外周上に複数のローラー14を備え、複数のローラーは保持位置近傍にある基板をその外周を挟持して保持するようになっており、ローラーは大径部と大径部の上部に小径部が一体に形成された構造であり、大径部の上部に基板搬送の際に基板を仮置きできる肩部を備え、肩部には外周に向かって下がる勾配の傾斜面が形成される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウエハ等の基板を所定の保持位置に保持する基板保持機構を備え、該基板保持機構で保持された基板に基板処理機構で所定の処理を施す基板処理ユニット、及び該基板処理ユニットに基板を搬入搬出する基板搬送方法に関するものである。また、本発明は半導体ウエハ等の基板を所定の保持位置に保持する基板保持機構を備える基板洗浄処理ユニットおよび該基板洗浄処理ユニットを備える基板めっき装置に関するものである。
【背景技術】
【0002】
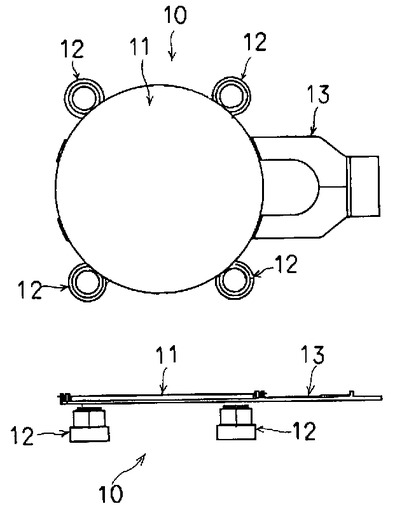
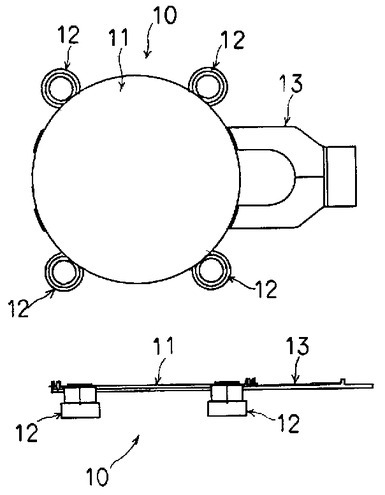
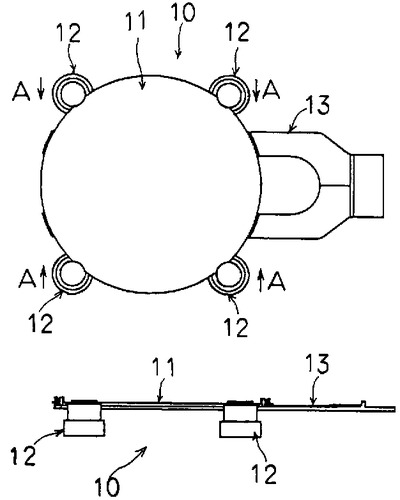
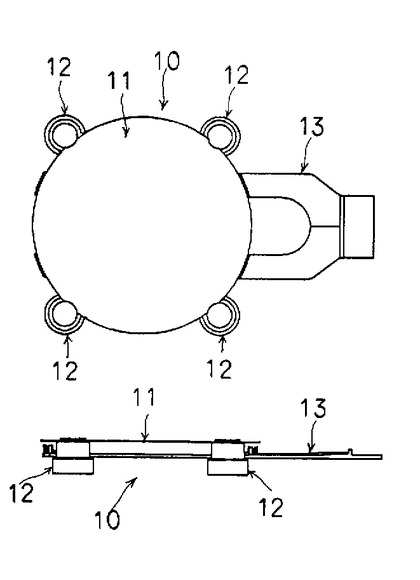
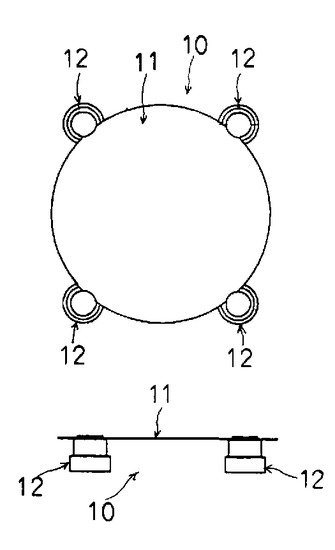
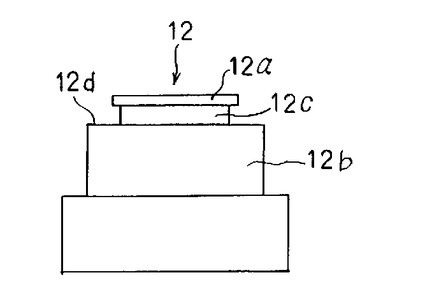
図1は従来のこの種の基板処理ユニットの基板の搬入、保持、搬出する部分構成及びその動作を示す図である。図示するように、基板処理ユニットは基板11を所定の位置に保持する基板保持機構10を備えている。該基板保持機構10は複数個(図では4個)のローラー12を備えている。各ローラー12は図2に示すように小径部12aと大径部12bからなり、大径部12bの上に小径部12aが一体的に形成された構成である。小径部12aと大径部12bの境界部に溝12cが形成され、大径部12bの上端は水平な肩部12dとなっている。また、各ローラー12は回転機構(図示せず)により回転できるようになっている。
【0003】
図1Aに示すように、ロボットアーム等の基板搬入機構13でローラー12の上方に搬入された基板11は、基板搬入機構13の下降により、図1Bに示すように、基板11の位置がローラー12の溝12cに一致する位置まで下降する。この状態で図1Cに示すようローラー12を矢印Aに示すように基板11に向かって移動させることにより、基板11の外周をローラー12の溝12cに係合させ、該基板11をローラー12で基板保持位置に挟持する。続いて図1Dに示すように、基板搬入機構13をさらに下降させ、基板11から離間した状態とする。その後、基板搬入機構13を基板保持機構10から退避させる。これにより、図1Eに示すような状態となり、4個のローラー12で基板11を挟持して、所定の位置に保持する。
【0004】
上記のように基板11を複数個のローラー12で挟持した状態で、基板11に所定の処理を終了した後、例えば洗浄処理が終了した後、基板搬入機構13を図1Dに示すように基板保持機構10で保持された基板11の下方に挿入させ、図1Cに示すように基板搬入機構13を基板11を受け取る位置まで上昇させ、ローラー12を矢印Aとは反対側に移動させ、基板11を図1Bに示すように基板搬入機構13に渡し、更に基板搬入機構13を図1Aに示すように上昇させ、退避させ基板11を搬出する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
半導体ウエハ等の基板を所定位置に保持した状態で、洗浄処理等の各種処理を行う基板処理装置において、基板の搬送時間を短縮することは、スループットを向上させる上で重要な項目である。また、搬送時間を短縮するためには、搬送の際の工程を減らすことなど搬送効率を上げる必要がある。しかしながら、基板は他からの衝撃や干渉なく慎重に搬送される必要があり、搬送工程を減らすためには基板保持の方法や基板搬送の方法をより効率良く行う必要がある。
【0006】
図1に示す従来の基板の搬入、保持、搬出では、図1Aに示すように、ロボットアーム等の基板搬入機構13により、基板11を基板処理ユニット内の基板保持機構10の上部に搬入した後、図1Bに示すように、基板搬入機構13を下降させて基板11の位置をローラー12の溝12cに係合させ、その後図1Cに示すようローラー12で基板11を挟持し、更に図1Dに示すように基板搬入機構13をさらに下降させ、基板搬入機構13を基板保持機構10から退避させている。そのため基板搬入機構13で基板11を保持している時間が長くなり、基板11の搬送時間を短縮し、スループットを向上させる上で問題となっていた。
【0007】
本発明は上述の点に鑑みてなされたもので、上記問題点を除去し、ロボットアーム等の基板搬入機構を基板の搬入後速やかに基板の把持から解放し、基板を保持する時間を短縮し、スループットを向上させることができる基板処理ユニット、基板搬送方法、基板洗浄処理ユニット及び基板めっき装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため本発明に係る基板処理ユニットは、例えば図3および図13に示すように、基板11を所定の保持位置に保持し、基板11の保持位置外周上に複数のローラー14を備える基板保持機構10であって、複数のローラー14は保持位置近傍にある基板11をその外周を挟持して保持するようになっている、基板保持機構10と;基板保持機構10で保持された基板11に所定の処理を施す処理機構32と;基板11を保持位置近傍に案内するガイドピン15を具備する基板ガイド機構20とを備え;ローラー14は、大径部14bと大径部14bの上部に小径部14aが一体に形成された構造であり、大径部14bの上部に基板11搬送の際に基板11を仮置きできる肩部14dを備え、肩部14dには外周に向かって下がる勾配の傾斜面が形成されている。
【0009】
また、前記課題を解決するため本発明に係る基板処理ユニットは、例えば図10および図13に示すように、基板11を所定の保持位置に保持し、基板11の保持位置外周上に複数のローラー14を備える基板保持機構10であって、複数のローラー14は保持位置近傍にある基板11をその外周を挟持して保持するようになっている、基板保持機構10と;基板保持機構10で保持された基板11に所定の処理を施す処理機構32と;基板11を保持位置近傍に案内するガイドピン15を具備し、基板11の搬送の際に基板11を仮置きできる仮置き器具25を有する基板ガイド機構20とを備え;ローラー14は、大径部14bと大径部14bの上部に小径部14aが一体に形成された構造であり、大径部14bの上部に外周に向かって下がる勾配の傾斜面が形成されている肩部14dを備える。
【0010】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、例えば図4に示すように、基板11は円板状であり、基板ガイド機構20のガイドピン15は保持位置に保持された基板11の外周に配置され、基板11の保持・解放の際に基板11が動いても基板11を保持位置近傍に案内する機能を備えてもよい。
【0011】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、例えば図4に示すように、基板ガイド機構20のガイドピン15は、上部がテーパ状に形成され、基板11の搬送に際して基板11の位置ずれを吸収できる機能を備えてもよい。
【0012】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、例えば図4に示すように、基板ガイド機構20のガイドピン15は、保持位置にある基板11の処理の際、基板11と干渉しないよう基板11の外周から離れた位置に配置されてもよい。
【0013】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、ローラー14は回転機構により回転できるようになっており、ローラー14の回転により基板11が回転するように構成されてもよい。
【0014】
また、本発明に係る基板搬送方法は、例えば図5および図9に示すように、基板搬入機構10により搬入された基板11を所定の保持位置に保持し、所定の処理の終了後、基板11を搬出する基板搬送方法において、搬入された基板11を、基板搬入機構10の下降によりガイドピン15で保持位置近傍に案内する工程と;基板11を仮置部14dに載置し、基板搬入機構10から離間させる工程と;基板搬入機構10から離間させた基板11を保持位置に複数個のローラー14で基板11の外周を挟持して保持する工程と;保持された基板11に所定の処理を行う工程と;所定の処理を行った基板11の保持を解放することにより、基板11を仮置部14dに載置する工程と;仮置部14dに載置された基板11を搬出する工程とを備え;ローラー14は大径部14bの上に小径部14aが一体に形成され、且つ大径部14bの上部は肩部14dが形成された構成であり、肩部14dには外周に向かって下がる勾配の傾斜面が形成され、肩部14dに載置された基板11は複数のローラー14の基板11側の移動により挟持保持され、その反対の移動により離間し肩部14dに載置される。
【0015】
また、本発明に係る基板洗浄処理ユニットは、例えば図5および図13に示すように、基板11を所定の保持位置に保持する複数のローラー14であって、大径部14bと大径部14bの上部に小径部14aが一体に形成された構造であり、大径部14bの上部に基板11を搬送する際に基板11を仮置きできる肩部14dを備え、肩部14dには外周に向かって下がる勾配の傾斜面が形成され、保持位置近傍にある基板11をその外周を挟持して保持する複数のローラー14と;基板11を保持位置近傍に案内するガイドピン15と;ローラー14に保持された基板11に洗浄液を供給する洗浄ノズル32と;ローラー14に保持された基板11の表面に当接するブラシ31を備える。
【0016】
また、本発明に係る基板めっき装置は、例えば図18および図19に示すように、基板にめっき前処理およびめっき処理を行うめっき前処理及びめっきユニット48と;めっき前処理及びめっきユニット48で、めっき前処理及びめっき処理を行われた基板を洗浄する、上述の基板洗浄処理ユニット46と;めっき前処理及びめっき処理を行われた基板を、めっき前処理及びめっきユニット48から基板洗浄処理ユニット46に搬送し、また、基板洗浄処理ユニット46から基板を搬出する基板搬送ロボット42とを備える。
【発明の効果】
【0017】
本発明に係る基板処理ユニットによれば、基板を保持位置近傍に案内するガイドピンを具備する基板ガイド機構を備えたことにより、ロボットアーム等の基板搬入機構で搬入した基板を基板保持機構に渡すまで把持する必要がなく、基板搬入後速やかに基板搬入機構を基板把持から解放でき、該基板搬入機構を次の工程に使用することができる。また、処理終了後の基板も基板保持機構の保持から解放されガイドピンにより保持位置近傍にあるから、基板搬入機構が基板保持機構に関係なく、基板を速やかに搬出できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、ローラーは、基板搬送の際に該基板を仮置きできる肩部を備えた構造であるので、該ローラーの肩部を基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該肩部に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該肩部に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0018】
また、本発明に係る基板処理ユニットによれば、基板を保持位置近傍に案内するガイドピンを具備する基板ガイド機構を備えたことにより、ロボットアーム等の基板搬入機構で搬入した基板を基板保持機構に渡すまで把持する必要がなく、基板搬入後速やかに基板搬入機構を基板把持から解放でき、該基板搬入機構を次の工程に使用することができる。また、処理終了後の基板も基板保持機構の保持から解放されガイドピンの保持位置近傍にあるから、基板搬入機構が基板保持機構に関係なく、基板を速やかに搬出できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、基板ガイド機構に仮置き器具が備えられているので、基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該仮置き器具に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該仮置き器具に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0019】
ガイドピンが保持位置に保持された基板の外周に配置され、基板の保持・解放の際に該基板が動いても該基板を保持位置近傍に案内する機能を備えることにより、基板搬入・搬出機構による基板の搬入・搬出が容易で且つ正確に迅速に行うことができる。
【0020】
ガイドピンの上部がテーパ状に形成され、基板の搬送に際して該基板の位置ずれを吸収できる機能を備えることにより、搬入された基板の位置がずれていても、ガイドピンのテーパ上でこの位置ずれが修正され基板を保持位置近傍に案内するから、基板は所定の保持位置近傍に収まり、その後の基板保持機構による基板の挟持・保持が、迅速且つ正確に行うことが可能となる。
【0021】
基板ガイド機構のガイドピンが、保持位置にある基板の処理の際、該基板と干渉しないよう該基板の外周から離れた位置に配置されることにより、基板の処理に際してガイドピンが障害となることがなく、処理をスムーズに実行できる。
【0022】
ローラーが回転機構により回転でき、該ローラーの回転により基板が回転するように構成されているので、例えば基板を洗浄処理する場合、基板を回転しながら基板の全面を均等に処理することが容易に実行できる。
【0023】
本発明に係る基板搬送方法によれば、基板搬入機構により搬入された基板は、基板搬入機構の下降により基板ガイド機構のガイドピンで保持位置近傍に案内されると共に、基板保持機構の基板仮置部に載置されて該基板搬入機構から離間し、その後基板保持機構で基板を保持位置に保持し所定の処理の終了後、該基板保持機構が基板の保持を解放することにより、基板は仮置部に載置され、仮置部に載置された基板を基板搬出機構で搬出するので、基板の搬出搬入に基板搬入・搬出機構と基板保持機構の連係動作が必要なく、一方の動作で実行できるから、基板の搬入・搬出が容易で且つ迅速に実行できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、ローラーは、基板搬送の際に該基板を仮置きできる肩部を備えた構造であるので、該ローラーの肩部を基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該肩部に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該肩部に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0024】
本発明に係る基板洗浄処理ユニットによれば、基板を所定の保持位置に保持する複数のローラーであって、大径部と大径部の上部に小径部が一体に形成された構造であり、大径部の上部に基板を搬送する際に基板を仮置きできる肩部を備え、肩部には外周に向かって下がる勾配の傾斜面が形成され、保持位置近傍にある基板をその外周を挟持して保持する複数のローラーと、基板を保持位置近傍に案内するガイドピンとを備えるので、基板搬入後速やかに基板搬入機構を基板把持から解放でき、該基板搬入機構を次の工程に使用することができる。また、処理終了後の基板も基板保持機構の保持から解放されガイドピンにより保持位置近傍にあるから、基板搬入機構が基板保持機構に関係なく、基板を速やかに搬出できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、ローラーは、基板搬送の際に該基板を仮置きできる肩部を備えた構造であるので、該ローラーの肩部を基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該肩部に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該肩部に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0025】
本発明に係る基板めっき装置では、上記の基板洗浄処理ユニットを備えるので、基板洗浄装置への基板の搬入および搬出が速やかに実行でき、処理効率の高い基板めっき装置となる。
【発明を実施するための最良の形態】
【0026】
この出願は、日本国で2005年8月29日に出願された特願2005−248308号に基づいており、その内容は本出願の内容として、その一部を形成する。
本発明は以下の詳細な説明によりさらに完全に理解できるであろう。本発明のさらなる応用範囲は、以下の詳細な説明により明らかとなろう。しかしながら、詳細な説明及び特定の実例は、本発明の望ましい実施の形態であり、説明の目的のためにのみ記載されているものである。この詳細な説明から、種々の変更、改変が、本発明の精神と範囲内で、当業者にとって明らかであるからである。
出願人は、記載された実施の形態のいずれをも公衆に献上する意図はなく、改変、代替案のうち、特許請求の範囲内に文言上含まれないかもしれないものも、均等論下での発明の一部とする。
【0027】
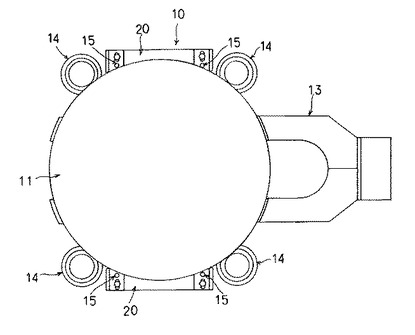
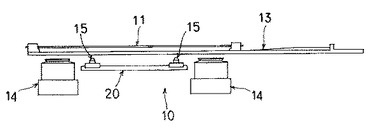
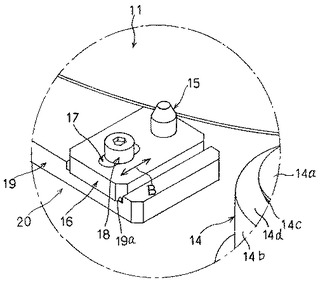
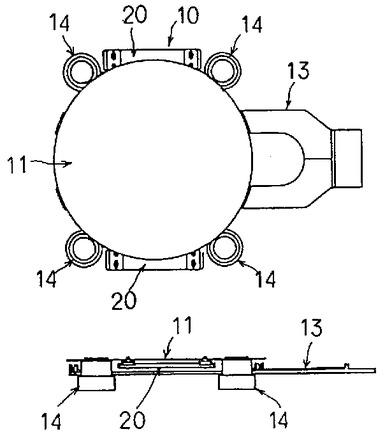
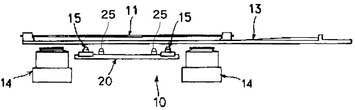
以下、本発明の実施形態例を図面に基づいて説明する。図3乃至図5は本発明に係る基板処理ユニットの基板保持機構及び基板搬入機構の構成を示す図であり、図3Aは平面図、図3Bは側面図、図4は基板ガイド機構の構成を示す図、図5は基板保持機構のローラーの構成を示す図である。なお、図3乃至図5において、図1と同一符号を付した部分は同一又は相当部分を示す。
【0028】
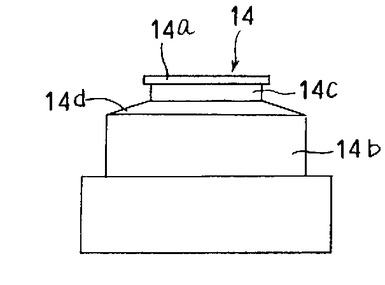
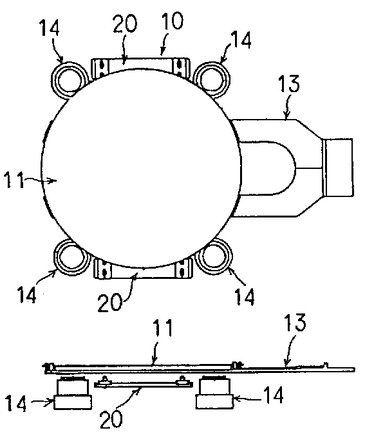
基板処理ユニットは、図示するように、基板11を所定の位置に保持する基板保持機構10を備えている。該基板保持機構10は、複数個(図では4個)のローラー14を備えている。各ローラー14は図5に示すように小径部14aと大径部14bからなり、大径部14bの上に小径部14aが一体的に形成された構成である。大径部14bの上部は外周側に下がり勾配の斜面が形成された肩部14dとなっており、該肩部14dと小径部14aの境界部に基板11の外周部が係合する溝14cが形成されている。また、各ローラー14は回転機構(図示せず)により回転できるようになっている。
【0029】
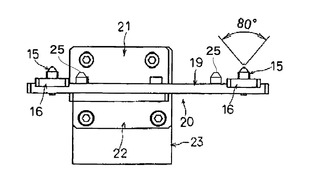
基板保持機構10で所定の保持位置に保持される基板11の外周近傍には基板ガイド機構20、20が配置されている。該基板ガイド機構20は図4に示すように、ガイドピン15が立設されたスライド板16を具備し、該スライド板16はガイド機構取付フレーム19に設けた溝19a内を矢印B方向にスライドできるようになっている。スライド板16は長穴17が形成され、ネジ18を緩めてスライド板16を矢印B方向に移動させ、即ちスライド板16を基板11の外周で該基板11に当接又は離間する方向に移動させ、ネジ18を締めることにより、ガイドピン15を所定の保持位置に保持された基板11の外周近傍(基板11の外周から所定距離離れた位置)に位置決めできるようになっている。
【0030】
ガイドピン15は円柱状でその上部がテーパ状に形成された構成となっており、基板11の搬送に際して、基板11が位置ずれしても、該テーパ面を基板11の外周が滑りながら下降することにより、この位置ずれを吸収できるようになっている。図3A、図3Bに示すように、ロボットアーム等の基板搬入機構13でローラー14の上方に搬入された基板11は、基板搬入機構13の下降により、4個のローラー14の肩部14dに載置され支持される。この搬入に際して基板11が位置ずれしていても、4本のガイドピン15で囲まれた円周内に入っていれば、基板11の外周はガイドピン15のテーパ面に摺接して下降する際にその位置ずれが補正(吸収)され、4個のローラー14の肩部14dに載置される。ここでは、4個のローラー14の肩部14dは基板11を仮置きする仮置台としての機能を有する。
【0031】
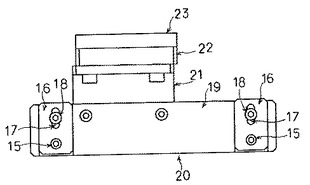
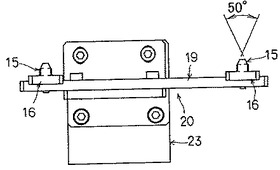
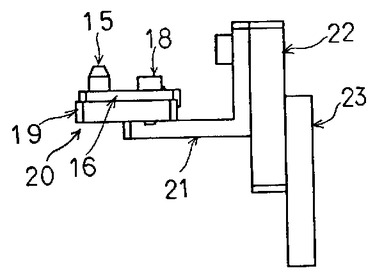
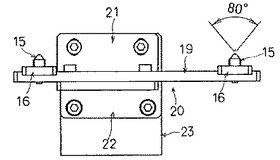
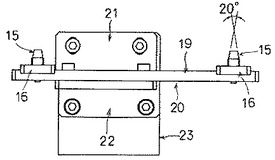
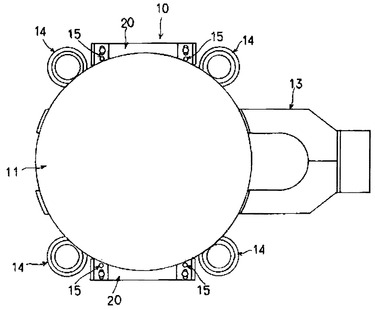
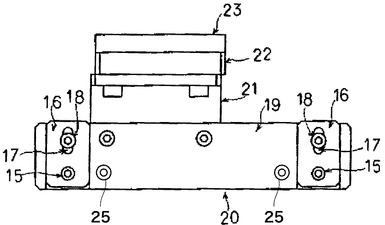
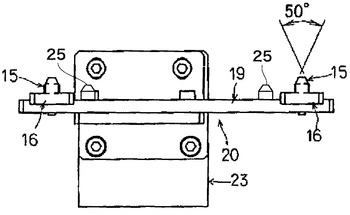
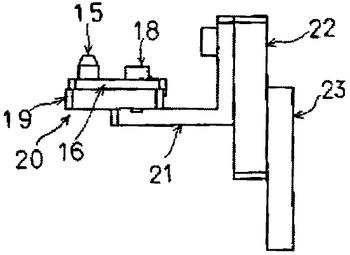
図6は基板ガイド機構20及びその取り付け構造を示す図で、図6Aは平面図、図6Bは正面図、図6Cは側面図である。基板ガイド機構20のガイド機構取付フレーム19は基板処理ユニットのフレーム23にブラケット21、22を介して取付けられている。ガイドピン15の位置はネジ18を締め、スライド板16をガイド機構取付フレーム19に対して移動させることにより、調整できる。ガイドピン15のテーパ部は50°で傾斜させている。なお、このガイドピン15のテーパ部の傾斜角度は図7に示すように80°、図8に示すように20°というように、基板11を案内する条件により変えてもよい。図7に示すように、テーパ部の傾斜角度を80°以上とした場合は、基板11を落とし込む位置の自由度を大きくできるが、基板11が斜めに落ち込むことがある。また、図8に示すように、テーパ部の傾斜角度を20°以下とした場合は、基板11を落とし込む自由度が小さくなるため、基板11を落とし込む際の位置決め精度を高くする必要がある。ガイドピン15は、ここで塩化ビニール製としているが、ガイドピン15は少なくともその基板11に接する部分は塩化ビニール等の樹脂材とすることがよい。
【0032】
次に基板保持機構10及び基板搬入機構13の動作を図9を用いて説明する。先ず、図9Aに示すように、基板11を把持したロボットアーム等の基板搬入機構13をローラー14を備えた基板保持機構10の上方に進入させる。この状態から基板搬入機構13を下降させることにより、基板11は基板ガイド機構20、20の4本のガイドピン15 (図3参照)に案内されながら下降し、図9Bに示すように4個のローラー14の肩部14dに支持され、基板搬入機構13から離間する。このとき基板11に位置ずれがある場合、ガイドピン15のテーパ面に基板11の外周が摺接しながら下降することにより、その位置が修正されて4個のローラー14の肩部14dに載置されることになる。また、基板11が基板搬入機構13の把持から解放されるときに、チャック等の動きに連れて基板11が動いてしまうと、基板11がローラー14の支持から外れて落下する可能性がある。しかし、ガイドピン15により動きを拘束されているので、そのような落下は防止される。
【0033】
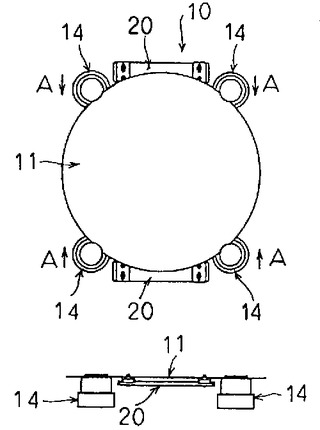
この状態で基板11は基板搬入機構13から離間しているから、基板搬入機構13を退避することにより図9Cに示すように、基板11は基板保持機構10の4個のローラー肩部14dに支持された状態となる。この状態で図9Dに示すように、4個のローラー14を矢印Aに示すように基板11に向かって移動させることにより、基板11の外周は各ローラー14の肩部14dの傾斜面に摺接しながら移動し、ローラー14の溝14cに係合し、該基板11はその外周を4個のローラー14で挟持される。この時、ガイド機構20のスライド板16とガイドピン15は各々基板11の下面と外周から所定距離離れている。なお、ローラー14の肩部14dには外周に向かって下がる勾配の傾斜面が形成されているので、基板11を肩部14dに仮置きしつつ、基盤11をローラーで挟持することもできる、すなわち、基板搬入機構13を下降させながら、ローラー14を移動してもよい。すると、基板11が肩部14dの傾斜面に接した時点で、基板11はローラー14の肩部14dに仮置きされた状態となり、更なるローラー14の連続的な移動により、ローラー14で挟持されることになる。したがって、基板11の基板搬入機構13の把持から、ローラ14の肩部14dでの仮置き、そしてローラー14による挟持までが、連続的にスムーズに実行できる。このように連続的にスムーズに実行できるので、従来のように基板搬入機構による基板の所定の高さへの下降と停止、ローラーの移動による基板の挟持、その後の基板搬入機構の更なる下降と退避の工程に比べ、所要時間を短縮でき、スループットを向上に寄与することができる。さらに、肩部14dが傾斜面となっているために、基板11とローラー14との接触面積が小さくなり、基板11を汚染する可能性が低減される。
【0034】
上記のように2本のガイドピンを具備する2個の基板ガイド機構20、20を基板保持機構10で保持される基板11の保持位置の両側に配置することにより、基板11を把持した基板搬入機構13が基板保持機構10の基板保持位置上方に進入し、下降するだけで、基板11は4個のローラー14の肩部14dに支持され離間するので、その後基板搬入機構13は解放され、直ちに退避し、次の工程に移動できる。なお、本実施の形態では、基板ガイド機構20は、2本のガイドピン15を1枚のスライド板16に備え、スライド板16を移動可能に構成したものとして説明したが、基板ガイド機構20の構成はこれに限られない。例えば、複数本のガイドピン15が基板保持機構10のあるいは処理槽30のフレーム23に直接設置されてもよく、この場合には、基板ガイド機構20はガイドピン15と同一のものとなる。すなわち、基板ガイド機構20は、ガイドピン15を備え、基板11の基板保持機構10への搬入の際に基板11を所定の位置にガイドする機構であればよい。なお、本実施例のようにスライド板16を備え、スライド板16を移動可能とすると、基板11をガイドする位置を容易に調整でき、また、基板11の大きさの変化にも対応できるので、好ましい。
【0035】
基板保持位置で基板保持機構10の4個のローラー14に外周を挟持された状態で所定の処理が施され、処理が終了した基板11は、図9Dに示すように4個のローラー14で挟持されている。基板11は、ローラー14を離間する方向(矢印Aとは反対方向)に移動させると、図9Cに示すように、4個のローラー14の肩部14dに支持された状態となる。この状態でロボットハンド等の基板搬出機構を基板保持機構10の下方に進入させ、上昇させることにより、4個のローラー14の肩部14dに支持された基板11は基板搬出機構に把持され、該基板搬出機構を退避することにより、搬出される。ここで、ローラー14の肩部14dには外周に向かって下がる勾配の傾斜面が形成されているので、基板11を肩部14dに仮置きしつつ、基盤11を基板搬出機構で把持することもできる、すなわち、ローラー14を移動させながら、基板搬出機構を上昇させてもよい。すると、ローラー14の移動により基板11が肩部14dの傾斜面に仮置きされ、その間に基板搬出機構は基板11を把持し、基板保持機構10から搬出する。ローラー14の移動と、基板搬出機構の上昇および退避とが同時に、かつ、連続的に行われる。したがって、基板11のローラー14による挟持から、ローラ14の肩部14dでの仮置き、そして基板搬出機構での搬出までが、連続的にスムーズに実行できる。このように連続的にスムーズに実行できるので、従来のようにローラーの移動による基板の挟持から仮置きへの変化、基板搬出機構の上昇と停止、ローラーの更なる移動による基板搬出機構による基板の把持、そして基板搬出機構の更なる上昇と退避の工程に比べ、所要時間を短縮でき、スループットを向上に寄与することができる。なお、基板搬出機構は、典型的には、基板搬入機構13と同一の機構であるが、異なる周知の機構を用いてもよい。
【0036】
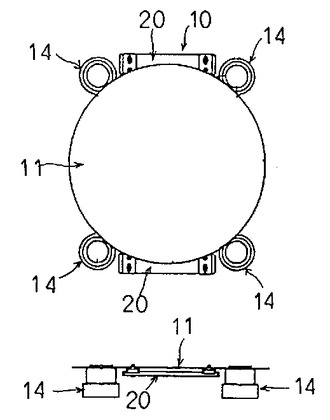
なお、上記例では基板保持機構10の4個のローラー14の肩部14dを基板11を載置する仮置台としているが、仮置台はこれに限定されるものではない。例えば図10〜12に示すように、スライド板16のガイドピン15の内側に、肩部14dと同じ高さの、あるいは肩部14dより僅かに高くローラー14の溝より僅かに低い高さの、あるいはローラー14の溝と同じ高さの、複数個の仮置き器具としての突起又はピン25(以降、「仮置きピン25」と称する。)を設けてもよい。そして、仮置きピン25に基板搬入機構13で搬入した基板11や基板保持機構10から解放された基板11を載置するように構成してもよい。このようにローラー14とは別に仮置きピン25を備えることにより、ローラー14で基板11を挟持する際には仮置きピン25と基板11とは接触せず、基板を擦る等により基板11を損傷することがない。
ここで、図10は、本発明に係る、仮置きピン25を備える基板保持機構及び基板搬入機構の構成を示す図であり、図10Aは平面図、図10Bは側面図である。図11は、仮置きピン25を備える基板ガイド機構20及びその取り付け構造を示す図で、図11Aは平面図、図11Bは正面図、図11Cは側面図である。図12は、仮置きピン25を備える基板処理ユニットの基板ガイド機構20の構造例を示す図である。
【0037】
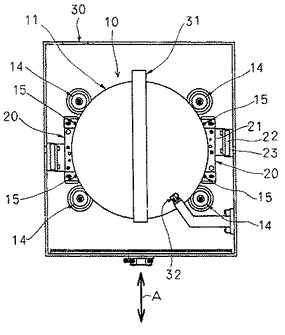
図13乃至図17は本発明に係る基板洗浄処理ユニットの構成例を示す図で、図13は平面構成を示す平面図、図14は外観構成を示す正面図、図15は内部の側面構成を示す側面図、図16は裏面構成を示す裏面図、図17は全体構成を示す斜視図である。基板洗浄処理ユニットは処理槽30を備え、その内部に図3に示す4個のローラー14を備えた基板保持機構10が配置される。基板11が該4個のローラー14にその外周部が挟持され、ローラー14が回転することにより回転するようになっている。基板保持機構10で所定位置に保持された基板11の外周部近傍にガイドピン15が位置するように基板ガイド機構20、20が配置されている。
【0038】
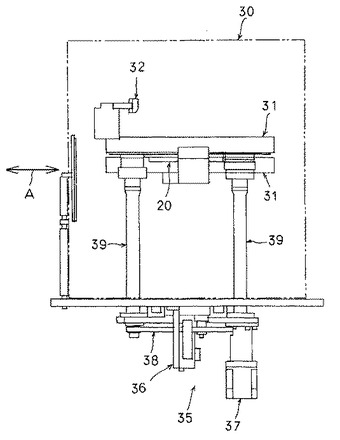
基板ガイド機構20、20のガイド機構取付フレーム19は図6に示すように、ブラケット21、22を介して処理槽30のフレーム23に取付けられている。基板保持機構10の4個のローラー14に挟持されて保持された基板11の上下面にはロール状ブラシ31が当接する。上下方向に配置された洗浄ノズル32(下方の洗浄ノズル32の図示は省略)から洗浄液が基板11の上下面に供給され、回転するロール状ブラシ31とローラー14の回転により回転する基板11の相対運動により、基板11の上下面は洗浄される。
【0039】
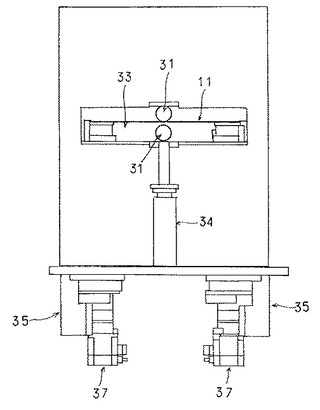
処理槽30の正面には基板11を搬出入する搬出入口33が設けられる。該搬出入口33には開閉シャッター(図示は省略)が設けられ、シャッター開閉用シリンダ34で搬出入口33を開閉するようになっている。処理槽30の下方には、左右2個ずつ計4個のローラー14を回転させたり、該ローラー14を図9Dの矢印Aに示すように基板11を挟持する方向やその反対方向に移動させるための2個のローラー駆動機構35が設けられている。また、基板11は開口された搬出入口33から矢印Aに方向に搬出入できるようになっている。
【0040】
各ローラー駆動機構35は夫々基板11の挟持・解放のためのチャック開閉用シリンダ36、ローラー回転用モーター37を備えている。左右のチャック開閉用シリンダ36を作動させることにより、各ローラー14が図9Dの矢印Aに示す方向又反対方向に移動し、基板11を挟持・解放するようになっている。また、左右のローラー回転用モーター37を起動することにより、ベルト38及びスピンドル39を介して左右2個ずつ計4個のローラー14が同一方向に回転し、基板11を回転するようになっている。
【0041】
上記構成の基板洗浄処理ユニットにおいて、搬出入口33からロボットアーム等の基板搬入機構13(図3参照)により搬入された基板11は、図9A乃至図9Dに示す手順で、4個のローラー14に挟持され、洗浄される。洗浄処理の終了した後の基板11は、図9A乃至図9Dに示す手順と略逆の手順で処理槽30から搬出される。
【0042】
図18は図13乃至図17に示す構成の基板洗浄処理ユニットを備えた基板処理装置(めっき装置)の平面構成例を示す図である。本基板処理装置は、例えばスミフボックス等の内部に多数の半導体ウエハ等の基板を収納した搬送ボックス40を着脱自在にした矩形状の装置フレーム41を備えている。この装置フレーム41の内部中央部には、第1基板搬送ロボット42、仮置台43、及び第2基板搬送ロボット44が、直列に配置されている。
【0043】
そして両側に位置して、一対の基板洗浄・乾燥ユニット45、基板洗浄ユニット46、めっき前処理ユニット47、めっき前処理及びめっきユニット48が配置されている。更に、搬送ボックス40と反対側に、めっき前処理ユニット47にめっき前処理液を供給するめっき前処理液供給部49と、めっき前処理及びめっきユニット48にめっき液を供給するめっき液供給部50が配置されている。基板洗浄ユニット46には図13乃至図17に示す構成の基板洗浄処理ユニットを用いている。
【0044】
図18に示す構成の基板処理装置は、クリーンルーム内に設置され、装置フレーム41からクリーンルーム内に空気が流出しないように構成されている。また、装置フレーム41の内部には、新鮮な空気の下向きの流れ(ダウンフロー)が形成されている。
【0045】
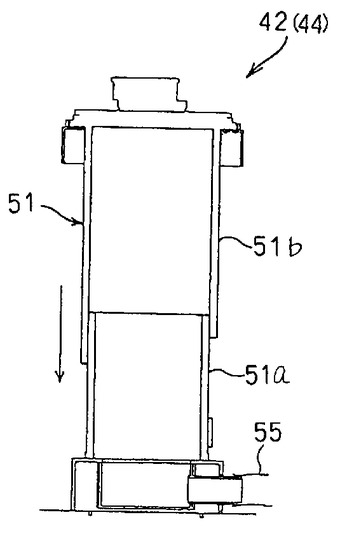
図19乃至図21は、第1基板搬送ロボット42の構成を示す図である。なお、第2基板搬送ロボット44も第1基板搬送ロボット42と同様な構成をしている。第1基板搬送ロボット42は、いわゆる固定式ロボットであり、上下方向に伸縮自在な胴51と、該胴部51の上端に取付けた回転駆動部52、該回転駆動部52に取付けた水平方向に伸縮自在なロボットアーム53を有している。このロボットアーム53の先端に基板11を把持するハンド54(図3の基板搬入機構13)が連結されている。
【0046】
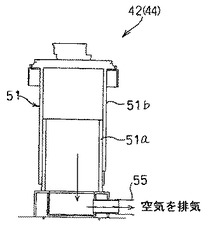
胴部51は、図21に示すように、共に中空の内胴51aと外胴51bを有する、いわゆる入れ子式によって伸縮自在に構成されている。胴部51の底部に、中空の内胴51a及び外胴51bの内部に連通する排気ダクト(排気部)55が接続され、第1基板搬送ロボット42の内部の空気を、排気ダクト55を通して外部に排気して回収するようになっている。
【0047】
これによって、例えば第1基板搬送ロボット42の胴部51の伸縮による上下動に伴って該第1基板搬送ロボット42の内部から排気される空気が、特に内胴51aと外胴51bとの間を通過して第1基板搬送ロボット42の外部に漏れるのを防止する。したがって、第1基板搬送ロボット42の近傍における気流を一定に保って、基板11がパーティクルによって汚染されることを防止することができる。
【0048】
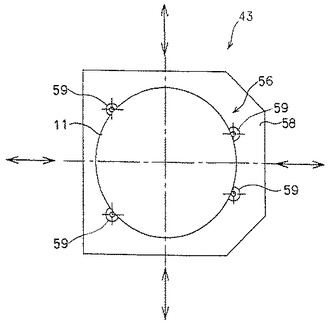
図22及び図23は、仮置台43を示す図である。この仮置台43は、第1基板搬送ロボット42と第2基板搬送ロボット44側の一方から基板11の出し入れを行うようになっている。なお、任意の方向から出し入れできるようにしてもよいことは勿論である。このように、第1基板搬送ロボット42と第2基板搬送ロボット44の間に、基板11を仮置する仮置台43を配置することで、装置フレーム41内における基板11の搬送を効率的に行うとともに、第1基板搬送ロボット42と第2基板搬送ロボット44として、固定式ロボットを使用できる。したがって、装置全体のコスト低減を図ることができる。
【0049】
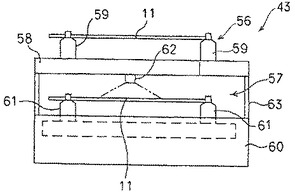
仮置台43には、上段のドライ用基板保持部56と、下段のウエット用基板保持部57が、仕切り板58で仕切られて上下に設けられている。ドライ用基板保持部56は、基板11の周縁部に沿った位置に仕切り板58に立設した複数の支持ピン59を備え、この支持ピン59の上部に設けたテーパ部を介して基板11を位置決めしつつ保持する。ウエット用基板保持部57もほぼ同様に、基板11の周縁部に沿った位置にベース板60を立設した複数の支持ピン61を備え、この支持ピン61の上部に設けたテーパ部を介して基板11を位置決めしつつ保持する。
【0050】
仕切り板58の下面には、該基板11の乾燥を防止する乾燥防止機構としての純水スプレーノズル62が取付けられている。純水スプレーノズル62は、ウエット用基板保持部57の支持ピン61で保持した基板11の表面(上面)に向けて純水を噴霧することにより、基板11の乾燥を防止する。更に、仕切り板58とベース板60との間には、純水スプレーノズル62から基板11に向けて噴射された純水が外部に漏れるのを防止するシャッター63が開閉自在に設けられている。
【0051】
第1基板搬送ロボット42で搬送された基板11は、上段のドライ用基板保持部56の支持ピン59で位置決めされて保持される。一連の処理後に第2基板搬送ロボット44で保持され、搬送された基板11は、下段のウエット用基板保持部57の支持ピン61で位置決めされる。そして、基板11が保持されたか否かは、図示しないセンサで検知される。
【0052】
上記構成の基板処理装置において、第1搬送ロボット42は、搬送ボックス40から1枚の基板11を取り出して仮置台43のドライ用基板保持部56に搬送する。基板11は、該ドライ用基板保持部56で保持される。該ドライ用基板保持部56で保持された基板11を第2基板搬送ロボット44でめっき前処理ユニット47に搬送する。該めっき前処理ユニット47で基板11にめっき前処理を行う。めっき前処理の終了した基板11を第2基板搬送ロボット44でめっき前処理及びめっきユニット48に搬送し、ここでめっき前処理及びめっき処理を行う。めっき処理の終了した基板11を第2基板搬送ロボット44で図13乃至図17に示す構成を有する基板洗浄ユニット46に搬送する。
【0053】
基板洗浄ユニット46では、基板11の上下面をロール状ブラシ31で洗浄し、基板11の表面に付着したパーティクルや不要物を除去する。該パーティクルや不要物が除去された基板11を第2基板搬送ロボット44で仮置台43のウエット用基板保持部57に搬送し、該ウエット用基板保持部57で保持する。この保持中に、純水スプレーノズル62から純水を基板11に向けて噴霧することで、基板の乾燥を防止する。
【0054】
第1基板搬送ロボット42は、仮置台43のウエット用基板保持部57から基板11を取り出し、基板洗浄・乾燥ユニット45に搬送する。ここで、基板11の表面の化学洗浄及び純水洗浄を行って、スピン乾燥させる。このスピン乾燥後の基板11を第1基板搬送ロボット42で搬送ボックス40内に戻す。これにより基板11の処理は終了する。
【0055】
以上、本発明の実施形態を説明したが、本発明は上記実施形態に限定されるものではなく、特許請求の範囲、及び明細書と図面に記載された技術的思想の範囲内において種々の変形が可能である。
【0056】
本発明の説明に関連して(特に以下の請求項に関連して)用いられる名詞及び同様な指示語の使用は、本明細書中で特に指摘したり、明らかに文脈と矛盾したりしない限り、単数および複数の両方に及ぶものと解釈される。語句「備える」、「有する」、「含む」および「包含する」は、特に断りのない限り、オープンエンドターム(すなわち「〜を含むが限定しない」という意味)として解釈される。本明細書中の数値範囲の具陳は、本明細書中で特に指摘しない限り、単にその範囲内に該当する各値を個々に言及するための略記法としての役割を果たすことだけを意図しており、各値は、本明細書中で個々に列挙されたかのように、明細書に組み込まれる。本明細書中で説明されるすべての方法は、本明細書中で特に指摘したり、明らかに文脈と矛盾したりしない限り、あらゆる適切な順番で行うことができる。本明細書中で使用するあらゆる例または例示的な言い回し(例えば「など」)は、特に主張しない限り、単に本発明をよりよく説明することだけを意図し、本発明の範囲に対する制限を設けるものではない。明細書中のいかなる言い回しも、本発明の実施に不可欠である、請求項に記載されていない要素を示すものとは解釈されないものとする。
【0057】
本明細書中では、本発明を実施するため本発明者が知っている最良の形態を含め、本発明の好ましい実施の形態について説明している。当業者にとっては、上記説明を読んだ上で、これらの好ましい実施の形態の変形が明らかとなろう。本発明者は、熟練者が適宜このような変形を適用することを期待しており、本明細書中で具体的に説明される以外の方法で本発明が実施されることを予定している。従って本発明は、準拠法で許されているように、本明細書に添付された請求項に記載の内容の修正および均等物をすべて含む。さらに、本明細書中で特に指摘したり、明らかに文脈と矛盾したりしない限り、すべての変形における上記要素のいずれの組合せも本発明に包含される。
【図面の簡単な説明】
【0058】
【図1A】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1B】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1C】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1D】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1E】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図2】従来の基板処理ユニットの基板保持機構のローラーの構成例を示す図である。
【図3A】本発明に係る基板処理ユニットの基板保持機構及び基板搬入機構の構成を示す図である(平面図)。
【図3B】本発明に係る基板処理ユニットの基板保持機構及び基板搬入機構の構成を示す図である(側面図)。
【図4】本発明に係る基板処理ユニットの基板ガイド機構の構成を示す図である。
【図5】本発明に係る基板処理ユニットの基板保持機構のローラーの構成を示す図である。
【図6A】本発明に係る基板処理ユニットの基板ガイド機構及び取付け構造を示す図である(平面図)。
【図6B】本発明に係る基板処理ユニットの基板ガイド機構及び取付け構造を示す図である(正面図)。
【図6C】本発明に係る基板処理ユニットの基板ガイド機構及び取付け構造を示す図である(側面図)。
【図7】本発明に係る基板処理ユニットの基板ガイド機構の構造を示す図である。
【図8】本発明に係る基板処理ユニットの基板ガイド機構の構造を示す図である。
【図9A】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図9B】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図9C】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図9D】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図10A】本発明に係る仮置きピンを備える基板保持機構及び基板搬入機構の構成を示す図である。(平面図)
【図10B】本発明に係る仮置きピンを備える基板保持機構及び基板搬入機構の構成を示す図である。(側面図)
【図11A】本発明に係る仮置きピンを備える基板ガイド機構及び取付け構造を示す図である。(平面図)
【図11B】本発明に係る仮置きピンを備える基板ガイド機構及び取付け構造を示す図である。(正面図)
【図11C】本発明に係る仮置きピンを備える基板ガイド機構及び取付け構造を示す図である。(側面図)
【図12】本発明に係る仮置きピンを備える基板処理ユニットの基板ガイド機構の構造を示す図である。
【図13】本発明に係る基板処理ユニットの平面構成を示す平面図である。
【図14】本発明に係る基板処理ユニットの外観構成示す正面図である。
【図15】本発明に係る基板処理ユニットの側面構成を示す側面図である。
【図16】本発明に係る基板処理ユニットの裏面構成を示す裏面図である。
【図17】本発明に係る基板処理ユニットの全体構成を示す斜視図である。
【図18】本発明に係る基板処理ユニットを備えた基板処理装置の平面構成を示す平面図である。
【図19】搬送ロボットの構成例を示す斜視図である。
【図20】搬送ロボットの構成例を示す側面図である。
【図21A】搬送ロボットの胴構成例及びその動作を示す側面図である。
【図21B】搬送ロボットの胴構成例及びその動作を示す側面図である。
【図22】仮置台の平面構成を示す平面図である。
【図23】仮置台の側面構成を示す側面図である。
【符号の説明】
【0059】
10 基板保持機構
11 基板
12 ローラー
13 基板搬入機構
14 ローラー
15 ガイドピン
16 スライド板
17 長穴
18 ネジ
19 ガイド機構取付フレーム
20 基板ガイド機構
21 ブラケット
22 ブラケット
23 フレーム
25 仮置きピン
30 処理槽
31 ロール状ブラシ
32 洗浄ノズル
33 搬出入口
34 シャッター開閉用シリンダ
35 ローラー駆動機構
36 チャック開閉用シリンダ
37 ローラー回転用モーター
38 ベルト
39 スピンドル
40 搬送ボックス
41 装置フレーム
42 第1基板搬送ロボット
43 仮置台
44 第2基板搬送ロボット
45 基板洗浄・乾燥ユニット
46 基板洗浄ユニット
47 めっき前処理ユニット
48 めっき前処理及びめっきユニット
49 めっき前処理液供給部
50 めっき液供給部
51 胴部
52 回転駆動部
53 ロボットアーム
54 ハンド
55 排気ダクト
56 ドライ用基板保持部
57 ウエット用基板保持部
58 仕切り板
59 支持ピン
60 ベース板
61 支持ピン
62 純水スプレーノズル
63 シャッター
【技術分野】
【0001】
本発明は、半導体ウエハ等の基板を所定の保持位置に保持する基板保持機構を備え、該基板保持機構で保持された基板に基板処理機構で所定の処理を施す基板処理ユニット、及び該基板処理ユニットに基板を搬入搬出する基板搬送方法に関するものである。また、本発明は半導体ウエハ等の基板を所定の保持位置に保持する基板保持機構を備える基板洗浄処理ユニットおよび該基板洗浄処理ユニットを備える基板めっき装置に関するものである。
【背景技術】
【0002】
図1は従来のこの種の基板処理ユニットの基板の搬入、保持、搬出する部分構成及びその動作を示す図である。図示するように、基板処理ユニットは基板11を所定の位置に保持する基板保持機構10を備えている。該基板保持機構10は複数個(図では4個)のローラー12を備えている。各ローラー12は図2に示すように小径部12aと大径部12bからなり、大径部12bの上に小径部12aが一体的に形成された構成である。小径部12aと大径部12bの境界部に溝12cが形成され、大径部12bの上端は水平な肩部12dとなっている。また、各ローラー12は回転機構(図示せず)により回転できるようになっている。
【0003】
図1Aに示すように、ロボットアーム等の基板搬入機構13でローラー12の上方に搬入された基板11は、基板搬入機構13の下降により、図1Bに示すように、基板11の位置がローラー12の溝12cに一致する位置まで下降する。この状態で図1Cに示すようローラー12を矢印Aに示すように基板11に向かって移動させることにより、基板11の外周をローラー12の溝12cに係合させ、該基板11をローラー12で基板保持位置に挟持する。続いて図1Dに示すように、基板搬入機構13をさらに下降させ、基板11から離間した状態とする。その後、基板搬入機構13を基板保持機構10から退避させる。これにより、図1Eに示すような状態となり、4個のローラー12で基板11を挟持して、所定の位置に保持する。
【0004】
上記のように基板11を複数個のローラー12で挟持した状態で、基板11に所定の処理を終了した後、例えば洗浄処理が終了した後、基板搬入機構13を図1Dに示すように基板保持機構10で保持された基板11の下方に挿入させ、図1Cに示すように基板搬入機構13を基板11を受け取る位置まで上昇させ、ローラー12を矢印Aとは反対側に移動させ、基板11を図1Bに示すように基板搬入機構13に渡し、更に基板搬入機構13を図1Aに示すように上昇させ、退避させ基板11を搬出する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
半導体ウエハ等の基板を所定位置に保持した状態で、洗浄処理等の各種処理を行う基板処理装置において、基板の搬送時間を短縮することは、スループットを向上させる上で重要な項目である。また、搬送時間を短縮するためには、搬送の際の工程を減らすことなど搬送効率を上げる必要がある。しかしながら、基板は他からの衝撃や干渉なく慎重に搬送される必要があり、搬送工程を減らすためには基板保持の方法や基板搬送の方法をより効率良く行う必要がある。
【0006】
図1に示す従来の基板の搬入、保持、搬出では、図1Aに示すように、ロボットアーム等の基板搬入機構13により、基板11を基板処理ユニット内の基板保持機構10の上部に搬入した後、図1Bに示すように、基板搬入機構13を下降させて基板11の位置をローラー12の溝12cに係合させ、その後図1Cに示すようローラー12で基板11を挟持し、更に図1Dに示すように基板搬入機構13をさらに下降させ、基板搬入機構13を基板保持機構10から退避させている。そのため基板搬入機構13で基板11を保持している時間が長くなり、基板11の搬送時間を短縮し、スループットを向上させる上で問題となっていた。
【0007】
本発明は上述の点に鑑みてなされたもので、上記問題点を除去し、ロボットアーム等の基板搬入機構を基板の搬入後速やかに基板の把持から解放し、基板を保持する時間を短縮し、スループットを向上させることができる基板処理ユニット、基板搬送方法、基板洗浄処理ユニット及び基板めっき装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため本発明に係る基板処理ユニットは、例えば図3および図13に示すように、基板11を所定の保持位置に保持し、基板11の保持位置外周上に複数のローラー14を備える基板保持機構10であって、複数のローラー14は保持位置近傍にある基板11をその外周を挟持して保持するようになっている、基板保持機構10と;基板保持機構10で保持された基板11に所定の処理を施す処理機構32と;基板11を保持位置近傍に案内するガイドピン15を具備する基板ガイド機構20とを備え;ローラー14は、大径部14bと大径部14bの上部に小径部14aが一体に形成された構造であり、大径部14bの上部に基板11搬送の際に基板11を仮置きできる肩部14dを備え、肩部14dには外周に向かって下がる勾配の傾斜面が形成されている。
【0009】
また、前記課題を解決するため本発明に係る基板処理ユニットは、例えば図10および図13に示すように、基板11を所定の保持位置に保持し、基板11の保持位置外周上に複数のローラー14を備える基板保持機構10であって、複数のローラー14は保持位置近傍にある基板11をその外周を挟持して保持するようになっている、基板保持機構10と;基板保持機構10で保持された基板11に所定の処理を施す処理機構32と;基板11を保持位置近傍に案内するガイドピン15を具備し、基板11の搬送の際に基板11を仮置きできる仮置き器具25を有する基板ガイド機構20とを備え;ローラー14は、大径部14bと大径部14bの上部に小径部14aが一体に形成された構造であり、大径部14bの上部に外周に向かって下がる勾配の傾斜面が形成されている肩部14dを備える。
【0010】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、例えば図4に示すように、基板11は円板状であり、基板ガイド機構20のガイドピン15は保持位置に保持された基板11の外周に配置され、基板11の保持・解放の際に基板11が動いても基板11を保持位置近傍に案内する機能を備えてもよい。
【0011】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、例えば図4に示すように、基板ガイド機構20のガイドピン15は、上部がテーパ状に形成され、基板11の搬送に際して基板11の位置ずれを吸収できる機能を備えてもよい。
【0012】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、例えば図4に示すように、基板ガイド機構20のガイドピン15は、保持位置にある基板11の処理の際、基板11と干渉しないよう基板11の外周から離れた位置に配置されてもよい。
【0013】
また、本発明に係る基板処理ユニットは、上述の基板処理ユニットにおいて、ローラー14は回転機構により回転できるようになっており、ローラー14の回転により基板11が回転するように構成されてもよい。
【0014】
また、本発明に係る基板搬送方法は、例えば図5および図9に示すように、基板搬入機構10により搬入された基板11を所定の保持位置に保持し、所定の処理の終了後、基板11を搬出する基板搬送方法において、搬入された基板11を、基板搬入機構10の下降によりガイドピン15で保持位置近傍に案内する工程と;基板11を仮置部14dに載置し、基板搬入機構10から離間させる工程と;基板搬入機構10から離間させた基板11を保持位置に複数個のローラー14で基板11の外周を挟持して保持する工程と;保持された基板11に所定の処理を行う工程と;所定の処理を行った基板11の保持を解放することにより、基板11を仮置部14dに載置する工程と;仮置部14dに載置された基板11を搬出する工程とを備え;ローラー14は大径部14bの上に小径部14aが一体に形成され、且つ大径部14bの上部は肩部14dが形成された構成であり、肩部14dには外周に向かって下がる勾配の傾斜面が形成され、肩部14dに載置された基板11は複数のローラー14の基板11側の移動により挟持保持され、その反対の移動により離間し肩部14dに載置される。
【0015】
また、本発明に係る基板洗浄処理ユニットは、例えば図5および図13に示すように、基板11を所定の保持位置に保持する複数のローラー14であって、大径部14bと大径部14bの上部に小径部14aが一体に形成された構造であり、大径部14bの上部に基板11を搬送する際に基板11を仮置きできる肩部14dを備え、肩部14dには外周に向かって下がる勾配の傾斜面が形成され、保持位置近傍にある基板11をその外周を挟持して保持する複数のローラー14と;基板11を保持位置近傍に案内するガイドピン15と;ローラー14に保持された基板11に洗浄液を供給する洗浄ノズル32と;ローラー14に保持された基板11の表面に当接するブラシ31を備える。
【0016】
また、本発明に係る基板めっき装置は、例えば図18および図19に示すように、基板にめっき前処理およびめっき処理を行うめっき前処理及びめっきユニット48と;めっき前処理及びめっきユニット48で、めっき前処理及びめっき処理を行われた基板を洗浄する、上述の基板洗浄処理ユニット46と;めっき前処理及びめっき処理を行われた基板を、めっき前処理及びめっきユニット48から基板洗浄処理ユニット46に搬送し、また、基板洗浄処理ユニット46から基板を搬出する基板搬送ロボット42とを備える。
【発明の効果】
【0017】
本発明に係る基板処理ユニットによれば、基板を保持位置近傍に案内するガイドピンを具備する基板ガイド機構を備えたことにより、ロボットアーム等の基板搬入機構で搬入した基板を基板保持機構に渡すまで把持する必要がなく、基板搬入後速やかに基板搬入機構を基板把持から解放でき、該基板搬入機構を次の工程に使用することができる。また、処理終了後の基板も基板保持機構の保持から解放されガイドピンにより保持位置近傍にあるから、基板搬入機構が基板保持機構に関係なく、基板を速やかに搬出できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、ローラーは、基板搬送の際に該基板を仮置きできる肩部を備えた構造であるので、該ローラーの肩部を基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該肩部に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該肩部に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0018】
また、本発明に係る基板処理ユニットによれば、基板を保持位置近傍に案内するガイドピンを具備する基板ガイド機構を備えたことにより、ロボットアーム等の基板搬入機構で搬入した基板を基板保持機構に渡すまで把持する必要がなく、基板搬入後速やかに基板搬入機構を基板把持から解放でき、該基板搬入機構を次の工程に使用することができる。また、処理終了後の基板も基板保持機構の保持から解放されガイドピンの保持位置近傍にあるから、基板搬入機構が基板保持機構に関係なく、基板を速やかに搬出できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、基板ガイド機構に仮置き器具が備えられているので、基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該仮置き器具に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該仮置き器具に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0019】
ガイドピンが保持位置に保持された基板の外周に配置され、基板の保持・解放の際に該基板が動いても該基板を保持位置近傍に案内する機能を備えることにより、基板搬入・搬出機構による基板の搬入・搬出が容易で且つ正確に迅速に行うことができる。
【0020】
ガイドピンの上部がテーパ状に形成され、基板の搬送に際して該基板の位置ずれを吸収できる機能を備えることにより、搬入された基板の位置がずれていても、ガイドピンのテーパ上でこの位置ずれが修正され基板を保持位置近傍に案内するから、基板は所定の保持位置近傍に収まり、その後の基板保持機構による基板の挟持・保持が、迅速且つ正確に行うことが可能となる。
【0021】
基板ガイド機構のガイドピンが、保持位置にある基板の処理の際、該基板と干渉しないよう該基板の外周から離れた位置に配置されることにより、基板の処理に際してガイドピンが障害となることがなく、処理をスムーズに実行できる。
【0022】
ローラーが回転機構により回転でき、該ローラーの回転により基板が回転するように構成されているので、例えば基板を洗浄処理する場合、基板を回転しながら基板の全面を均等に処理することが容易に実行できる。
【0023】
本発明に係る基板搬送方法によれば、基板搬入機構により搬入された基板は、基板搬入機構の下降により基板ガイド機構のガイドピンで保持位置近傍に案内されると共に、基板保持機構の基板仮置部に載置されて該基板搬入機構から離間し、その後基板保持機構で基板を保持位置に保持し所定の処理の終了後、該基板保持機構が基板の保持を解放することにより、基板は仮置部に載置され、仮置部に載置された基板を基板搬出機構で搬出するので、基板の搬出搬入に基板搬入・搬出機構と基板保持機構の連係動作が必要なく、一方の動作で実行できるから、基板の搬入・搬出が容易で且つ迅速に実行できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、ローラーは、基板搬送の際に該基板を仮置きできる肩部を備えた構造であるので、該ローラーの肩部を基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該肩部に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該肩部に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0024】
本発明に係る基板洗浄処理ユニットによれば、基板を所定の保持位置に保持する複数のローラーであって、大径部と大径部の上部に小径部が一体に形成された構造であり、大径部の上部に基板を搬送する際に基板を仮置きできる肩部を備え、肩部には外周に向かって下がる勾配の傾斜面が形成され、保持位置近傍にある基板をその外周を挟持して保持する複数のローラーと、基板を保持位置近傍に案内するガイドピンとを備えるので、基板搬入後速やかに基板搬入機構を基板把持から解放でき、該基板搬入機構を次の工程に使用することができる。また、処理終了後の基板も基板保持機構の保持から解放されガイドピンにより保持位置近傍にあるから、基板搬入機構が基板保持機構に関係なく、基板を速やかに搬出できる。また、基板保持機構は、基板の保持位置外周上に複数のローラーを備え、該複数のローラーは保持位置近傍にある基板の外周を挟持して保持できるようになっているので、基板の挟持・解放はローラーを基板に向けて接近、基板から離すだけで容易に実行することができる。また、ローラーは、基板搬送の際に該基板を仮置きできる肩部を備えた構造であるので、該ローラーの肩部を基板の仮置台として使用することにより、基板の搬入・搬出が基板保持機構と基板搬入・搬出機構の連係動作を必要とすることなく、且つ容易、確実に実行できる。さらに、ローラーの肩部には外周に向かって下がる勾配の傾斜面が形成されているので、該肩部に仮置きされた基板をローラーで挟持する際、またローラーで挟持されている基板を該肩部に移す際、ローラーの基板への接近、基板からの離間のみで、スムーズに実行できる。
【0025】
本発明に係る基板めっき装置では、上記の基板洗浄処理ユニットを備えるので、基板洗浄装置への基板の搬入および搬出が速やかに実行でき、処理効率の高い基板めっき装置となる。
【発明を実施するための最良の形態】
【0026】
この出願は、日本国で2005年8月29日に出願された特願2005−248308号に基づいており、その内容は本出願の内容として、その一部を形成する。
本発明は以下の詳細な説明によりさらに完全に理解できるであろう。本発明のさらなる応用範囲は、以下の詳細な説明により明らかとなろう。しかしながら、詳細な説明及び特定の実例は、本発明の望ましい実施の形態であり、説明の目的のためにのみ記載されているものである。この詳細な説明から、種々の変更、改変が、本発明の精神と範囲内で、当業者にとって明らかであるからである。
出願人は、記載された実施の形態のいずれをも公衆に献上する意図はなく、改変、代替案のうち、特許請求の範囲内に文言上含まれないかもしれないものも、均等論下での発明の一部とする。
【0027】
以下、本発明の実施形態例を図面に基づいて説明する。図3乃至図5は本発明に係る基板処理ユニットの基板保持機構及び基板搬入機構の構成を示す図であり、図3Aは平面図、図3Bは側面図、図4は基板ガイド機構の構成を示す図、図5は基板保持機構のローラーの構成を示す図である。なお、図3乃至図5において、図1と同一符号を付した部分は同一又は相当部分を示す。
【0028】
基板処理ユニットは、図示するように、基板11を所定の位置に保持する基板保持機構10を備えている。該基板保持機構10は、複数個(図では4個)のローラー14を備えている。各ローラー14は図5に示すように小径部14aと大径部14bからなり、大径部14bの上に小径部14aが一体的に形成された構成である。大径部14bの上部は外周側に下がり勾配の斜面が形成された肩部14dとなっており、該肩部14dと小径部14aの境界部に基板11の外周部が係合する溝14cが形成されている。また、各ローラー14は回転機構(図示せず)により回転できるようになっている。
【0029】
基板保持機構10で所定の保持位置に保持される基板11の外周近傍には基板ガイド機構20、20が配置されている。該基板ガイド機構20は図4に示すように、ガイドピン15が立設されたスライド板16を具備し、該スライド板16はガイド機構取付フレーム19に設けた溝19a内を矢印B方向にスライドできるようになっている。スライド板16は長穴17が形成され、ネジ18を緩めてスライド板16を矢印B方向に移動させ、即ちスライド板16を基板11の外周で該基板11に当接又は離間する方向に移動させ、ネジ18を締めることにより、ガイドピン15を所定の保持位置に保持された基板11の外周近傍(基板11の外周から所定距離離れた位置)に位置決めできるようになっている。
【0030】
ガイドピン15は円柱状でその上部がテーパ状に形成された構成となっており、基板11の搬送に際して、基板11が位置ずれしても、該テーパ面を基板11の外周が滑りながら下降することにより、この位置ずれを吸収できるようになっている。図3A、図3Bに示すように、ロボットアーム等の基板搬入機構13でローラー14の上方に搬入された基板11は、基板搬入機構13の下降により、4個のローラー14の肩部14dに載置され支持される。この搬入に際して基板11が位置ずれしていても、4本のガイドピン15で囲まれた円周内に入っていれば、基板11の外周はガイドピン15のテーパ面に摺接して下降する際にその位置ずれが補正(吸収)され、4個のローラー14の肩部14dに載置される。ここでは、4個のローラー14の肩部14dは基板11を仮置きする仮置台としての機能を有する。
【0031】
図6は基板ガイド機構20及びその取り付け構造を示す図で、図6Aは平面図、図6Bは正面図、図6Cは側面図である。基板ガイド機構20のガイド機構取付フレーム19は基板処理ユニットのフレーム23にブラケット21、22を介して取付けられている。ガイドピン15の位置はネジ18を締め、スライド板16をガイド機構取付フレーム19に対して移動させることにより、調整できる。ガイドピン15のテーパ部は50°で傾斜させている。なお、このガイドピン15のテーパ部の傾斜角度は図7に示すように80°、図8に示すように20°というように、基板11を案内する条件により変えてもよい。図7に示すように、テーパ部の傾斜角度を80°以上とした場合は、基板11を落とし込む位置の自由度を大きくできるが、基板11が斜めに落ち込むことがある。また、図8に示すように、テーパ部の傾斜角度を20°以下とした場合は、基板11を落とし込む自由度が小さくなるため、基板11を落とし込む際の位置決め精度を高くする必要がある。ガイドピン15は、ここで塩化ビニール製としているが、ガイドピン15は少なくともその基板11に接する部分は塩化ビニール等の樹脂材とすることがよい。
【0032】
次に基板保持機構10及び基板搬入機構13の動作を図9を用いて説明する。先ず、図9Aに示すように、基板11を把持したロボットアーム等の基板搬入機構13をローラー14を備えた基板保持機構10の上方に進入させる。この状態から基板搬入機構13を下降させることにより、基板11は基板ガイド機構20、20の4本のガイドピン15 (図3参照)に案内されながら下降し、図9Bに示すように4個のローラー14の肩部14dに支持され、基板搬入機構13から離間する。このとき基板11に位置ずれがある場合、ガイドピン15のテーパ面に基板11の外周が摺接しながら下降することにより、その位置が修正されて4個のローラー14の肩部14dに載置されることになる。また、基板11が基板搬入機構13の把持から解放されるときに、チャック等の動きに連れて基板11が動いてしまうと、基板11がローラー14の支持から外れて落下する可能性がある。しかし、ガイドピン15により動きを拘束されているので、そのような落下は防止される。
【0033】
この状態で基板11は基板搬入機構13から離間しているから、基板搬入機構13を退避することにより図9Cに示すように、基板11は基板保持機構10の4個のローラー肩部14dに支持された状態となる。この状態で図9Dに示すように、4個のローラー14を矢印Aに示すように基板11に向かって移動させることにより、基板11の外周は各ローラー14の肩部14dの傾斜面に摺接しながら移動し、ローラー14の溝14cに係合し、該基板11はその外周を4個のローラー14で挟持される。この時、ガイド機構20のスライド板16とガイドピン15は各々基板11の下面と外周から所定距離離れている。なお、ローラー14の肩部14dには外周に向かって下がる勾配の傾斜面が形成されているので、基板11を肩部14dに仮置きしつつ、基盤11をローラーで挟持することもできる、すなわち、基板搬入機構13を下降させながら、ローラー14を移動してもよい。すると、基板11が肩部14dの傾斜面に接した時点で、基板11はローラー14の肩部14dに仮置きされた状態となり、更なるローラー14の連続的な移動により、ローラー14で挟持されることになる。したがって、基板11の基板搬入機構13の把持から、ローラ14の肩部14dでの仮置き、そしてローラー14による挟持までが、連続的にスムーズに実行できる。このように連続的にスムーズに実行できるので、従来のように基板搬入機構による基板の所定の高さへの下降と停止、ローラーの移動による基板の挟持、その後の基板搬入機構の更なる下降と退避の工程に比べ、所要時間を短縮でき、スループットを向上に寄与することができる。さらに、肩部14dが傾斜面となっているために、基板11とローラー14との接触面積が小さくなり、基板11を汚染する可能性が低減される。
【0034】
上記のように2本のガイドピンを具備する2個の基板ガイド機構20、20を基板保持機構10で保持される基板11の保持位置の両側に配置することにより、基板11を把持した基板搬入機構13が基板保持機構10の基板保持位置上方に進入し、下降するだけで、基板11は4個のローラー14の肩部14dに支持され離間するので、その後基板搬入機構13は解放され、直ちに退避し、次の工程に移動できる。なお、本実施の形態では、基板ガイド機構20は、2本のガイドピン15を1枚のスライド板16に備え、スライド板16を移動可能に構成したものとして説明したが、基板ガイド機構20の構成はこれに限られない。例えば、複数本のガイドピン15が基板保持機構10のあるいは処理槽30のフレーム23に直接設置されてもよく、この場合には、基板ガイド機構20はガイドピン15と同一のものとなる。すなわち、基板ガイド機構20は、ガイドピン15を備え、基板11の基板保持機構10への搬入の際に基板11を所定の位置にガイドする機構であればよい。なお、本実施例のようにスライド板16を備え、スライド板16を移動可能とすると、基板11をガイドする位置を容易に調整でき、また、基板11の大きさの変化にも対応できるので、好ましい。
【0035】
基板保持位置で基板保持機構10の4個のローラー14に外周を挟持された状態で所定の処理が施され、処理が終了した基板11は、図9Dに示すように4個のローラー14で挟持されている。基板11は、ローラー14を離間する方向(矢印Aとは反対方向)に移動させると、図9Cに示すように、4個のローラー14の肩部14dに支持された状態となる。この状態でロボットハンド等の基板搬出機構を基板保持機構10の下方に進入させ、上昇させることにより、4個のローラー14の肩部14dに支持された基板11は基板搬出機構に把持され、該基板搬出機構を退避することにより、搬出される。ここで、ローラー14の肩部14dには外周に向かって下がる勾配の傾斜面が形成されているので、基板11を肩部14dに仮置きしつつ、基盤11を基板搬出機構で把持することもできる、すなわち、ローラー14を移動させながら、基板搬出機構を上昇させてもよい。すると、ローラー14の移動により基板11が肩部14dの傾斜面に仮置きされ、その間に基板搬出機構は基板11を把持し、基板保持機構10から搬出する。ローラー14の移動と、基板搬出機構の上昇および退避とが同時に、かつ、連続的に行われる。したがって、基板11のローラー14による挟持から、ローラ14の肩部14dでの仮置き、そして基板搬出機構での搬出までが、連続的にスムーズに実行できる。このように連続的にスムーズに実行できるので、従来のようにローラーの移動による基板の挟持から仮置きへの変化、基板搬出機構の上昇と停止、ローラーの更なる移動による基板搬出機構による基板の把持、そして基板搬出機構の更なる上昇と退避の工程に比べ、所要時間を短縮でき、スループットを向上に寄与することができる。なお、基板搬出機構は、典型的には、基板搬入機構13と同一の機構であるが、異なる周知の機構を用いてもよい。
【0036】
なお、上記例では基板保持機構10の4個のローラー14の肩部14dを基板11を載置する仮置台としているが、仮置台はこれに限定されるものではない。例えば図10〜12に示すように、スライド板16のガイドピン15の内側に、肩部14dと同じ高さの、あるいは肩部14dより僅かに高くローラー14の溝より僅かに低い高さの、あるいはローラー14の溝と同じ高さの、複数個の仮置き器具としての突起又はピン25(以降、「仮置きピン25」と称する。)を設けてもよい。そして、仮置きピン25に基板搬入機構13で搬入した基板11や基板保持機構10から解放された基板11を載置するように構成してもよい。このようにローラー14とは別に仮置きピン25を備えることにより、ローラー14で基板11を挟持する際には仮置きピン25と基板11とは接触せず、基板を擦る等により基板11を損傷することがない。
ここで、図10は、本発明に係る、仮置きピン25を備える基板保持機構及び基板搬入機構の構成を示す図であり、図10Aは平面図、図10Bは側面図である。図11は、仮置きピン25を備える基板ガイド機構20及びその取り付け構造を示す図で、図11Aは平面図、図11Bは正面図、図11Cは側面図である。図12は、仮置きピン25を備える基板処理ユニットの基板ガイド機構20の構造例を示す図である。
【0037】
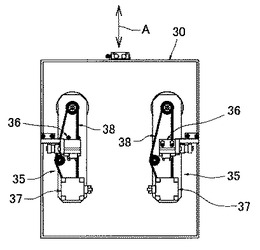
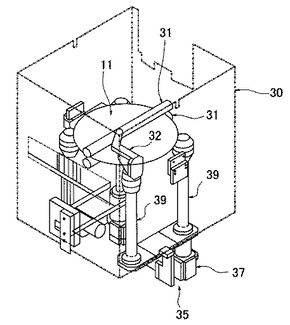
図13乃至図17は本発明に係る基板洗浄処理ユニットの構成例を示す図で、図13は平面構成を示す平面図、図14は外観構成を示す正面図、図15は内部の側面構成を示す側面図、図16は裏面構成を示す裏面図、図17は全体構成を示す斜視図である。基板洗浄処理ユニットは処理槽30を備え、その内部に図3に示す4個のローラー14を備えた基板保持機構10が配置される。基板11が該4個のローラー14にその外周部が挟持され、ローラー14が回転することにより回転するようになっている。基板保持機構10で所定位置に保持された基板11の外周部近傍にガイドピン15が位置するように基板ガイド機構20、20が配置されている。
【0038】
基板ガイド機構20、20のガイド機構取付フレーム19は図6に示すように、ブラケット21、22を介して処理槽30のフレーム23に取付けられている。基板保持機構10の4個のローラー14に挟持されて保持された基板11の上下面にはロール状ブラシ31が当接する。上下方向に配置された洗浄ノズル32(下方の洗浄ノズル32の図示は省略)から洗浄液が基板11の上下面に供給され、回転するロール状ブラシ31とローラー14の回転により回転する基板11の相対運動により、基板11の上下面は洗浄される。
【0039】
処理槽30の正面には基板11を搬出入する搬出入口33が設けられる。該搬出入口33には開閉シャッター(図示は省略)が設けられ、シャッター開閉用シリンダ34で搬出入口33を開閉するようになっている。処理槽30の下方には、左右2個ずつ計4個のローラー14を回転させたり、該ローラー14を図9Dの矢印Aに示すように基板11を挟持する方向やその反対方向に移動させるための2個のローラー駆動機構35が設けられている。また、基板11は開口された搬出入口33から矢印Aに方向に搬出入できるようになっている。
【0040】
各ローラー駆動機構35は夫々基板11の挟持・解放のためのチャック開閉用シリンダ36、ローラー回転用モーター37を備えている。左右のチャック開閉用シリンダ36を作動させることにより、各ローラー14が図9Dの矢印Aに示す方向又反対方向に移動し、基板11を挟持・解放するようになっている。また、左右のローラー回転用モーター37を起動することにより、ベルト38及びスピンドル39を介して左右2個ずつ計4個のローラー14が同一方向に回転し、基板11を回転するようになっている。
【0041】
上記構成の基板洗浄処理ユニットにおいて、搬出入口33からロボットアーム等の基板搬入機構13(図3参照)により搬入された基板11は、図9A乃至図9Dに示す手順で、4個のローラー14に挟持され、洗浄される。洗浄処理の終了した後の基板11は、図9A乃至図9Dに示す手順と略逆の手順で処理槽30から搬出される。
【0042】
図18は図13乃至図17に示す構成の基板洗浄処理ユニットを備えた基板処理装置(めっき装置)の平面構成例を示す図である。本基板処理装置は、例えばスミフボックス等の内部に多数の半導体ウエハ等の基板を収納した搬送ボックス40を着脱自在にした矩形状の装置フレーム41を備えている。この装置フレーム41の内部中央部には、第1基板搬送ロボット42、仮置台43、及び第2基板搬送ロボット44が、直列に配置されている。
【0043】
そして両側に位置して、一対の基板洗浄・乾燥ユニット45、基板洗浄ユニット46、めっき前処理ユニット47、めっき前処理及びめっきユニット48が配置されている。更に、搬送ボックス40と反対側に、めっき前処理ユニット47にめっき前処理液を供給するめっき前処理液供給部49と、めっき前処理及びめっきユニット48にめっき液を供給するめっき液供給部50が配置されている。基板洗浄ユニット46には図13乃至図17に示す構成の基板洗浄処理ユニットを用いている。
【0044】
図18に示す構成の基板処理装置は、クリーンルーム内に設置され、装置フレーム41からクリーンルーム内に空気が流出しないように構成されている。また、装置フレーム41の内部には、新鮮な空気の下向きの流れ(ダウンフロー)が形成されている。
【0045】
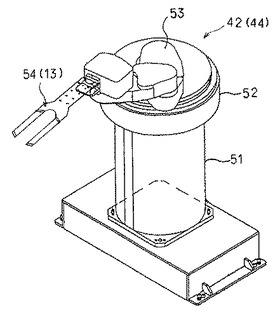
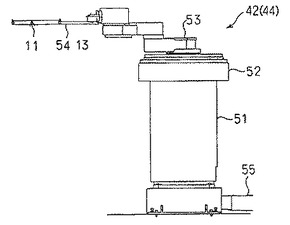
図19乃至図21は、第1基板搬送ロボット42の構成を示す図である。なお、第2基板搬送ロボット44も第1基板搬送ロボット42と同様な構成をしている。第1基板搬送ロボット42は、いわゆる固定式ロボットであり、上下方向に伸縮自在な胴51と、該胴部51の上端に取付けた回転駆動部52、該回転駆動部52に取付けた水平方向に伸縮自在なロボットアーム53を有している。このロボットアーム53の先端に基板11を把持するハンド54(図3の基板搬入機構13)が連結されている。
【0046】
胴部51は、図21に示すように、共に中空の内胴51aと外胴51bを有する、いわゆる入れ子式によって伸縮自在に構成されている。胴部51の底部に、中空の内胴51a及び外胴51bの内部に連通する排気ダクト(排気部)55が接続され、第1基板搬送ロボット42の内部の空気を、排気ダクト55を通して外部に排気して回収するようになっている。
【0047】
これによって、例えば第1基板搬送ロボット42の胴部51の伸縮による上下動に伴って該第1基板搬送ロボット42の内部から排気される空気が、特に内胴51aと外胴51bとの間を通過して第1基板搬送ロボット42の外部に漏れるのを防止する。したがって、第1基板搬送ロボット42の近傍における気流を一定に保って、基板11がパーティクルによって汚染されることを防止することができる。
【0048】
図22及び図23は、仮置台43を示す図である。この仮置台43は、第1基板搬送ロボット42と第2基板搬送ロボット44側の一方から基板11の出し入れを行うようになっている。なお、任意の方向から出し入れできるようにしてもよいことは勿論である。このように、第1基板搬送ロボット42と第2基板搬送ロボット44の間に、基板11を仮置する仮置台43を配置することで、装置フレーム41内における基板11の搬送を効率的に行うとともに、第1基板搬送ロボット42と第2基板搬送ロボット44として、固定式ロボットを使用できる。したがって、装置全体のコスト低減を図ることができる。
【0049】
仮置台43には、上段のドライ用基板保持部56と、下段のウエット用基板保持部57が、仕切り板58で仕切られて上下に設けられている。ドライ用基板保持部56は、基板11の周縁部に沿った位置に仕切り板58に立設した複数の支持ピン59を備え、この支持ピン59の上部に設けたテーパ部を介して基板11を位置決めしつつ保持する。ウエット用基板保持部57もほぼ同様に、基板11の周縁部に沿った位置にベース板60を立設した複数の支持ピン61を備え、この支持ピン61の上部に設けたテーパ部を介して基板11を位置決めしつつ保持する。
【0050】
仕切り板58の下面には、該基板11の乾燥を防止する乾燥防止機構としての純水スプレーノズル62が取付けられている。純水スプレーノズル62は、ウエット用基板保持部57の支持ピン61で保持した基板11の表面(上面)に向けて純水を噴霧することにより、基板11の乾燥を防止する。更に、仕切り板58とベース板60との間には、純水スプレーノズル62から基板11に向けて噴射された純水が外部に漏れるのを防止するシャッター63が開閉自在に設けられている。
【0051】
第1基板搬送ロボット42で搬送された基板11は、上段のドライ用基板保持部56の支持ピン59で位置決めされて保持される。一連の処理後に第2基板搬送ロボット44で保持され、搬送された基板11は、下段のウエット用基板保持部57の支持ピン61で位置決めされる。そして、基板11が保持されたか否かは、図示しないセンサで検知される。
【0052】
上記構成の基板処理装置において、第1搬送ロボット42は、搬送ボックス40から1枚の基板11を取り出して仮置台43のドライ用基板保持部56に搬送する。基板11は、該ドライ用基板保持部56で保持される。該ドライ用基板保持部56で保持された基板11を第2基板搬送ロボット44でめっき前処理ユニット47に搬送する。該めっき前処理ユニット47で基板11にめっき前処理を行う。めっき前処理の終了した基板11を第2基板搬送ロボット44でめっき前処理及びめっきユニット48に搬送し、ここでめっき前処理及びめっき処理を行う。めっき処理の終了した基板11を第2基板搬送ロボット44で図13乃至図17に示す構成を有する基板洗浄ユニット46に搬送する。
【0053】
基板洗浄ユニット46では、基板11の上下面をロール状ブラシ31で洗浄し、基板11の表面に付着したパーティクルや不要物を除去する。該パーティクルや不要物が除去された基板11を第2基板搬送ロボット44で仮置台43のウエット用基板保持部57に搬送し、該ウエット用基板保持部57で保持する。この保持中に、純水スプレーノズル62から純水を基板11に向けて噴霧することで、基板の乾燥を防止する。
【0054】
第1基板搬送ロボット42は、仮置台43のウエット用基板保持部57から基板11を取り出し、基板洗浄・乾燥ユニット45に搬送する。ここで、基板11の表面の化学洗浄及び純水洗浄を行って、スピン乾燥させる。このスピン乾燥後の基板11を第1基板搬送ロボット42で搬送ボックス40内に戻す。これにより基板11の処理は終了する。
【0055】
以上、本発明の実施形態を説明したが、本発明は上記実施形態に限定されるものではなく、特許請求の範囲、及び明細書と図面に記載された技術的思想の範囲内において種々の変形が可能である。
【0056】
本発明の説明に関連して(特に以下の請求項に関連して)用いられる名詞及び同様な指示語の使用は、本明細書中で特に指摘したり、明らかに文脈と矛盾したりしない限り、単数および複数の両方に及ぶものと解釈される。語句「備える」、「有する」、「含む」および「包含する」は、特に断りのない限り、オープンエンドターム(すなわち「〜を含むが限定しない」という意味)として解釈される。本明細書中の数値範囲の具陳は、本明細書中で特に指摘しない限り、単にその範囲内に該当する各値を個々に言及するための略記法としての役割を果たすことだけを意図しており、各値は、本明細書中で個々に列挙されたかのように、明細書に組み込まれる。本明細書中で説明されるすべての方法は、本明細書中で特に指摘したり、明らかに文脈と矛盾したりしない限り、あらゆる適切な順番で行うことができる。本明細書中で使用するあらゆる例または例示的な言い回し(例えば「など」)は、特に主張しない限り、単に本発明をよりよく説明することだけを意図し、本発明の範囲に対する制限を設けるものではない。明細書中のいかなる言い回しも、本発明の実施に不可欠である、請求項に記載されていない要素を示すものとは解釈されないものとする。
【0057】
本明細書中では、本発明を実施するため本発明者が知っている最良の形態を含め、本発明の好ましい実施の形態について説明している。当業者にとっては、上記説明を読んだ上で、これらの好ましい実施の形態の変形が明らかとなろう。本発明者は、熟練者が適宜このような変形を適用することを期待しており、本明細書中で具体的に説明される以外の方法で本発明が実施されることを予定している。従って本発明は、準拠法で許されているように、本明細書に添付された請求項に記載の内容の修正および均等物をすべて含む。さらに、本明細書中で特に指摘したり、明らかに文脈と矛盾したりしない限り、すべての変形における上記要素のいずれの組合せも本発明に包含される。
【図面の簡単な説明】
【0058】
【図1A】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1B】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1C】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1D】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図1E】従来の基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図2】従来の基板処理ユニットの基板保持機構のローラーの構成例を示す図である。
【図3A】本発明に係る基板処理ユニットの基板保持機構及び基板搬入機構の構成を示す図である(平面図)。
【図3B】本発明に係る基板処理ユニットの基板保持機構及び基板搬入機構の構成を示す図である(側面図)。
【図4】本発明に係る基板処理ユニットの基板ガイド機構の構成を示す図である。
【図5】本発明に係る基板処理ユニットの基板保持機構のローラーの構成を示す図である。
【図6A】本発明に係る基板処理ユニットの基板ガイド機構及び取付け構造を示す図である(平面図)。
【図6B】本発明に係る基板処理ユニットの基板ガイド機構及び取付け構造を示す図である(正面図)。
【図6C】本発明に係る基板処理ユニットの基板ガイド機構及び取付け構造を示す図である(側面図)。
【図7】本発明に係る基板処理ユニットの基板ガイド機構の構造を示す図である。
【図8】本発明に係る基板処理ユニットの基板ガイド機構の構造を示す図である。
【図9A】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図9B】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図9C】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図9D】本発明に係る基板処理ユニットの基板の搬入、保持、搬出する部分の構成及びその動作を示す図である。
【図10A】本発明に係る仮置きピンを備える基板保持機構及び基板搬入機構の構成を示す図である。(平面図)
【図10B】本発明に係る仮置きピンを備える基板保持機構及び基板搬入機構の構成を示す図である。(側面図)
【図11A】本発明に係る仮置きピンを備える基板ガイド機構及び取付け構造を示す図である。(平面図)
【図11B】本発明に係る仮置きピンを備える基板ガイド機構及び取付け構造を示す図である。(正面図)
【図11C】本発明に係る仮置きピンを備える基板ガイド機構及び取付け構造を示す図である。(側面図)
【図12】本発明に係る仮置きピンを備える基板処理ユニットの基板ガイド機構の構造を示す図である。
【図13】本発明に係る基板処理ユニットの平面構成を示す平面図である。
【図14】本発明に係る基板処理ユニットの外観構成示す正面図である。
【図15】本発明に係る基板処理ユニットの側面構成を示す側面図である。
【図16】本発明に係る基板処理ユニットの裏面構成を示す裏面図である。
【図17】本発明に係る基板処理ユニットの全体構成を示す斜視図である。
【図18】本発明に係る基板処理ユニットを備えた基板処理装置の平面構成を示す平面図である。
【図19】搬送ロボットの構成例を示す斜視図である。
【図20】搬送ロボットの構成例を示す側面図である。
【図21A】搬送ロボットの胴構成例及びその動作を示す側面図である。
【図21B】搬送ロボットの胴構成例及びその動作を示す側面図である。
【図22】仮置台の平面構成を示す平面図である。
【図23】仮置台の側面構成を示す側面図である。
【符号の説明】
【0059】
10 基板保持機構
11 基板
12 ローラー
13 基板搬入機構
14 ローラー
15 ガイドピン
16 スライド板
17 長穴
18 ネジ
19 ガイド機構取付フレーム
20 基板ガイド機構
21 ブラケット
22 ブラケット
23 フレーム
25 仮置きピン
30 処理槽
31 ロール状ブラシ
32 洗浄ノズル
33 搬出入口
34 シャッター開閉用シリンダ
35 ローラー駆動機構
36 チャック開閉用シリンダ
37 ローラー回転用モーター
38 ベルト
39 スピンドル
40 搬送ボックス
41 装置フレーム
42 第1基板搬送ロボット
43 仮置台
44 第2基板搬送ロボット
45 基板洗浄・乾燥ユニット
46 基板洗浄ユニット
47 めっき前処理ユニット
48 めっき前処理及びめっきユニット
49 めっき前処理液供給部
50 めっき液供給部
51 胴部
52 回転駆動部
53 ロボットアーム
54 ハンド
55 排気ダクト
56 ドライ用基板保持部
57 ウエット用基板保持部
58 仕切り板
59 支持ピン
60 ベース板
61 支持ピン
62 純水スプレーノズル
63 シャッター
【特許請求の範囲】
【請求項1】
基板を所定の保持位置に保持し、該基板の保持位置外周上に複数のローラーを備える基板保持機構であって、該複数のローラーは前記保持位置近傍にある前記基板をその外周を挟持して保持するようになっている、基板保持機構と;
該基板保持機構で保持された基板に所定の処理を施す処理機構と;
前記基板を前記保持位置近傍に案内するガイドピンを具備する基板ガイド機構とを備え;
前記ローラーは、大径部と該大径部の上部に小径部が一体に形成された構造であり、該大径部の上部に前記基板搬送の際に該基板を仮置きできる肩部を備え、該肩部には外周に向かって下がる勾配の傾斜面が形成されている;
基板処理ユニット。
【請求項2】
基板を所定の保持位置に保持し、該基板の保持位置外周上に複数のローラーを備える基板保持機構であって、該複数のローラーは前記保持位置近傍にある前記基板をその外周を挟持して保持するようになっている、基板保持機構と;
該基板保持機構で保持された基板に所定の処理を施す処理機構と;
前記基板を前記保持位置近傍に案内するガイドピンを具備し、前記基板の搬送の際に該基板を仮置きできる仮置き器具を有する基板ガイド機構とを備え;
前記ローラーは、大径部と該大径部の上部に小径部が一体に形成された構造であり、該大径部の上部に外周に向かって下がる勾配の傾斜面が形成されている肩部を備える;
基板処理ユニット。
【請求項3】
前記基板は円板状であり、前記基板ガイド機構のガイドピンは前記保持位置に保持された前記基板の外周に配置され、前記基板の保持・解放の際に該基板が動いても該基板を前記保持位置近傍に案内する機能を備えた;
請求項1又は請求項2に記載の基板処理ユニット。
【請求項4】
前記基板ガイド機構のガイドピンは、上部がテーパ状に形成され、前記基板の搬送に際して該基板の位置ずれを吸収できる機能を備えている;
請求項1ないし請求項3のいずれか1項に記載の基板処理ユニット。
【請求項5】
前記基板ガイド機構のガイドピンは、前記保持位置にある前記基板の処理の際、該基板と干渉しないよう該基板の外周から離れた位置に配置されている;
請求項1ないし請求項4のいずれか1項に記載の基板処理ユニット。
【請求項6】
前記ローラーは回転機構により回転できるようになっており、該ローラーの回転により前記基板が回転するように構成されている;
請求項1ないし請求項5のいずれか1項に記載の基板処理ユニット。
【請求項7】
基板搬入機構により搬入された基板を所定の保持位置に保持し、所定の処理の終了後、該基板を搬出する基板搬送方法において、
搬入された前記基板を、前記基板搬入機構の下降によりガイドピンで前記保持位置近傍に案内する工程と;
前記基板を仮置部に載置し、前記基板搬入機構から離間させる工程と;
前記基板搬入機構から離間させた基板を前記保持位置に複数個のローラーで前記基板の外周を挟持して保持する工程と;
前記保持された基板に所定の処理を行う工程と;
前記所定の処理を行った基板の保持を解放することにより、該基板を前記仮置部に載置する工程と;
前記仮置部に載置された基板を搬出する工程とを備え;
前記ローラーは大径部の上に小径部が一体に形成され、且つ該大径部の上部は肩部が形成された構成であり、該肩部には外周に向かって下がる勾配の傾斜面が形成され、該肩部に載置された前記基板は複数のローラーの該基板側の移動により挟持保持され、その反対の移動により離間し前記肩部に載置される;
基板搬送方法。
【請求項8】
基板を所定の保持位置に保持する複数のローラーであって、大径部と該大径部の上部に小径部が一体に形成された構造であり、該大径部の上部に前記基板を搬送する際に該基板を仮置きできる肩部を備え、該肩部には外周に向かって下がる勾配の傾斜面が形成され、前記保持位置近傍にある前記基板をその外周を挟持して保持する複数のローラーと;
前記基板を前記保持位置近傍に案内するガイドピンと;
前記ローラーに保持された前記基板に洗浄液を供給する洗浄ノズルと;
前記ローラーに保持された前記基板の表面に当接するブラシを備える;
基板洗浄処理ユニット。
【請求項9】
基板にめっき前処理およびめっき処理を行うめっき前処理及びめっきユニットと;
前記めっき前処理及びめっきユニットで、めっき前処理及びめっき処理を行われた基板を洗浄する、請求項8に記載の基板洗浄処理ユニットと;
前記めっき前処理及びめっき処理を行われた基板を、前記めっき前処理及びめっきユニットから前記基板洗浄処理ユニットに搬送し、また、前記基板洗浄処理ユニットから前記基板を搬出する基板搬送ロボットとを備える;
基板めっき装置。
【請求項1】
基板を所定の保持位置に保持し、該基板の保持位置外周上に複数のローラーを備える基板保持機構であって、該複数のローラーは前記保持位置近傍にある前記基板をその外周を挟持して保持するようになっている、基板保持機構と;
該基板保持機構で保持された基板に所定の処理を施す処理機構と;
前記基板を前記保持位置近傍に案内するガイドピンを具備する基板ガイド機構とを備え;
前記ローラーは、大径部と該大径部の上部に小径部が一体に形成された構造であり、該大径部の上部に前記基板搬送の際に該基板を仮置きできる肩部を備え、該肩部には外周に向かって下がる勾配の傾斜面が形成されている;
基板処理ユニット。
【請求項2】
基板を所定の保持位置に保持し、該基板の保持位置外周上に複数のローラーを備える基板保持機構であって、該複数のローラーは前記保持位置近傍にある前記基板をその外周を挟持して保持するようになっている、基板保持機構と;
該基板保持機構で保持された基板に所定の処理を施す処理機構と;
前記基板を前記保持位置近傍に案内するガイドピンを具備し、前記基板の搬送の際に該基板を仮置きできる仮置き器具を有する基板ガイド機構とを備え;
前記ローラーは、大径部と該大径部の上部に小径部が一体に形成された構造であり、該大径部の上部に外周に向かって下がる勾配の傾斜面が形成されている肩部を備える;
基板処理ユニット。
【請求項3】
前記基板は円板状であり、前記基板ガイド機構のガイドピンは前記保持位置に保持された前記基板の外周に配置され、前記基板の保持・解放の際に該基板が動いても該基板を前記保持位置近傍に案内する機能を備えた;
請求項1又は請求項2に記載の基板処理ユニット。
【請求項4】
前記基板ガイド機構のガイドピンは、上部がテーパ状に形成され、前記基板の搬送に際して該基板の位置ずれを吸収できる機能を備えている;
請求項1ないし請求項3のいずれか1項に記載の基板処理ユニット。
【請求項5】
前記基板ガイド機構のガイドピンは、前記保持位置にある前記基板の処理の際、該基板と干渉しないよう該基板の外周から離れた位置に配置されている;
請求項1ないし請求項4のいずれか1項に記載の基板処理ユニット。
【請求項6】
前記ローラーは回転機構により回転できるようになっており、該ローラーの回転により前記基板が回転するように構成されている;
請求項1ないし請求項5のいずれか1項に記載の基板処理ユニット。
【請求項7】
基板搬入機構により搬入された基板を所定の保持位置に保持し、所定の処理の終了後、該基板を搬出する基板搬送方法において、
搬入された前記基板を、前記基板搬入機構の下降によりガイドピンで前記保持位置近傍に案内する工程と;
前記基板を仮置部に載置し、前記基板搬入機構から離間させる工程と;
前記基板搬入機構から離間させた基板を前記保持位置に複数個のローラーで前記基板の外周を挟持して保持する工程と;
前記保持された基板に所定の処理を行う工程と;
前記所定の処理を行った基板の保持を解放することにより、該基板を前記仮置部に載置する工程と;
前記仮置部に載置された基板を搬出する工程とを備え;
前記ローラーは大径部の上に小径部が一体に形成され、且つ該大径部の上部は肩部が形成された構成であり、該肩部には外周に向かって下がる勾配の傾斜面が形成され、該肩部に載置された前記基板は複数のローラーの該基板側の移動により挟持保持され、その反対の移動により離間し前記肩部に載置される;
基板搬送方法。
【請求項8】
基板を所定の保持位置に保持する複数のローラーであって、大径部と該大径部の上部に小径部が一体に形成された構造であり、該大径部の上部に前記基板を搬送する際に該基板を仮置きできる肩部を備え、該肩部には外周に向かって下がる勾配の傾斜面が形成され、前記保持位置近傍にある前記基板をその外周を挟持して保持する複数のローラーと;
前記基板を前記保持位置近傍に案内するガイドピンと;
前記ローラーに保持された前記基板に洗浄液を供給する洗浄ノズルと;
前記ローラーに保持された前記基板の表面に当接するブラシを備える;
基板洗浄処理ユニット。
【請求項9】
基板にめっき前処理およびめっき処理を行うめっき前処理及びめっきユニットと;
前記めっき前処理及びめっきユニットで、めっき前処理及びめっき処理を行われた基板を洗浄する、請求項8に記載の基板洗浄処理ユニットと;
前記めっき前処理及びめっき処理を行われた基板を、前記めっき前処理及びめっきユニットから前記基板洗浄処理ユニットに搬送し、また、前記基板洗浄処理ユニットから前記基板を搬出する基板搬送ロボットとを備える;
基板めっき装置。
【図1A】

【図1B】
【図1C】
【図1D】
【図1E】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図10A】
【図10B】
【図11A】
【図11B】
【図11C】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】
【図20】
【図21A】
【図21B】
【図22】
【図23】
【図1B】
【図1C】
【図1D】
【図1E】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図10A】
【図10B】
【図11A】
【図11B】
【図11C】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21A】
【図21B】
【図22】
【図23】
【公表番号】特表2009−506516(P2009−506516A)
【公表日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2008−501503(P2008−501503)
【出願日】平成18年8月25日(2006.8.25)
【国際出願番号】PCT/JP2006/317284
【国際公開番号】WO2007/026852
【国際公開日】平成19年3月8日(2007.3.8)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
【公表日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成18年8月25日(2006.8.25)
【国際出願番号】PCT/JP2006/317284
【国際公開番号】WO2007/026852
【国際公開日】平成19年3月8日(2007.3.8)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
[ Back to top ]