
基板処理装置、テーブル機構、位置決め方法及びプログラム
【課題】コストを削減しつつ正確に基板を位置決めすることができる基板処理装置等の技術を提供すること。
【解決手段】本技術の一形態に係る基板処理装置は、テーブルと、偏心カム機構と、基準マークと、撮像部と、制御部とを具備する。前記テーブルは、基板を位置決めするためのテーブルである。前記偏心カム機構は、回転により前記テーブルを移動させる偏心カムを有する。前記基準マークは、前記テーブルの移動に応じて移動する。前記撮像部は、前記基準マークを撮像するための撮像部である。前記制御部は、前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする。
【解決手段】本技術の一形態に係る基板処理装置は、テーブルと、偏心カム機構と、基準マークと、撮像部と、制御部とを具備する。前記テーブルは、基板を位置決めするためのテーブルである。前記偏心カム機構は、回転により前記テーブルを移動させる偏心カムを有する。前記基準マークは、前記テーブルの移動に応じて移動する。前記撮像部は、前記基準マークを撮像するための撮像部である。前記制御部は、前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、スクリーン印刷装置等の基板処理装置、基板処理装置に用いられる位置決め機構等の技術に関する。
【背景技術】
【0002】
従来から、クリーム半田を基板上に印刷するスクリーン印刷装置が広く用いられている(例えば、特許文献1、2参照)。
【0003】
スクリーン印刷装置は、パターン孔が設けられたスクリーンの上方側にスキージが配置され、下方側に基板が配置される。スクリーン上には、クリーム半田が供給され、スキージは、スクリーン上をスライドされる。スキージがスクリーン上をスライドされると、パターン孔の下側に配置された基板にクリーム半田が印刷される。
【0004】
スクリーンの下方側に位置する基板は、ステージによって保持され、このステージは、X軸テーブル、Y軸テーブル、θ軸テーブル等の位置決め機構によって支持されている。この位置決め機構によって、ステージに保持された基板がスクリーンに対して位置決めされる。X軸テーブル、Y軸テーブル、θ軸テーブル等は、一般的に、ボールネジと、ボールネジを回転させるモータとによって駆動される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−234627号公報
【特許文献2】特開2007−237668号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
各軸のテーブルがボールネジ及びモータによって駆動される場合、スクリーンに対する基板の位置決め精度は、ボールネジの加工精度と、モータの回転を検出するエンコーダの精度とに依存する。近年、モータのエンコーダの性能は向上しつつあるが、ボールネジの精密加工は、依然としてコストが高いままである。
【0007】
以上のような事情に鑑み、本技術の目的は、コストを削減しつつ正確に基板を位置決めすることができる基板処理装置等の技術を提供することにある。
【課題を解決するための手段】
【0008】
本技術の一形態に係る基板処理装置は、テーブルと、偏心カム機構と、基準マークと、撮像部と、制御部とを具備する。
前記テーブルは、基板を位置決めするためのテーブルである。
前記偏心カム機構は、回転により前記テーブルを移動させる偏心カムを有する。
前記基準マークは、前記テーブルの移動に応じて移動する。
前記撮像部は、前記基準マークを撮像するための撮像部である。
前記制御部は、前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする。
【0009】
この基板処理装置では、テーブルを駆動させる機構として偏心カムを有する偏心カム機構が用いられているため、ボールネジ等を用いたテーブル駆動機構に比べて、コストを削減することができる。さらに、本実施形態では、偏心カムの回転に応じて移動する基準マークを撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量が測定されるので、基板の位置決め時に、偏心カムの回転により正確に基板を位置決めすることができる。
【0010】
上記基板処理装置は、前記偏心カムの仮のカムストローク中心を検出するセンサをさらに具備していてもよい。
この場合、前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、前記偏心カムの実際のカムストローク中心を測定してもよい。
【0011】
この基板処理装置では、偏心カムの仮のカムストローク中心を検出するセンサを有しているので、基板処理装置がカムストローク中心を未だ認識していない状態(例えば、電源投入時)でも、基板処理装置は、偏心カムのおおよそのカムストローク中心を認識することができる。そして、この基板処理装置は、偏心カムがおおよそのカムストローク中心(仮のカムストローク中心)に位置する状態から偏心カムを回転させ、基準マークを撮像部により撮像することで、偏心カムの実際のカムストローク中心を測定している。これにより、偏心カムの実際のカムストローク中心を正確に測定することができる。
【0012】
上記基板処理装置において、前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量を測定してもよい。
【0013】
これにより、偏心カムが偏心カムの実際のカムストローク中心に位置する状態から、偏心カムを回転させて、基準マークを移動させることができるので、偏心カムの回転に対するテーブルの移動量を正確に測定することができる。
【0014】
上記基板処理装置は、前記撮像部を移動させる移動機構をさらに具備していてもよい。
この場合、前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの実際のカムストローク中心を測定してもよい。
【0015】
この基板処理装置では、偏心カムが仮のカムストローク中心に位置する状態で、撮像部の撮像視野の中心に基準マークが位置するよう撮像部が移動され、その後に、偏心カムの回転に応じて移動する基準マークが撮像される。これにより、撮像部のレンズの歪みなどによって、基準マークの位置が正確に測定されなくなってしまうことを防止することができるので、さらに正確に実際のカムストローク中心を測定することができる。
【0016】
上記基板処理装置が、前記撮像部を移動させる移動機構をさらに具備する場合、前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの回転に対する前記テーブルの移動量を測定してもよい。
【0017】
この基板処理装置では、偏心カムが実際のカムストローク中心に位置する状態で、撮像部の撮像視野の中心に基準マークが位置するよう撮像部が移動され、その後に、偏心カムの回転に応じて移動する基準マークが撮像される。これにより、撮像部のレンズの歪みなどによって、基準マークの位置が正確に測定されなくなってしまうことを防止することができるので、さらに正確に偏心カムの回転に対するテーブルの移動量を測定することができる。
【0018】
上記基板処理装置において、前記偏心カム機構は、磁性体でなる前記偏心カムと、マグネットを含むカム受けブロックとを有していてもよい。
【0019】
このような機構により、偏心カムとカム受けブロックとが引き合うので、偏心カムの回転により一方向に移動させたステージを、逆方向に戻すことができる。
【0020】
上記基板処理装置において、前記基板は、アライメントマークを有していてもよい。
この場合、前記基板処理装置は、前記基板上のアライメントマークを撮像するための撮像部を具備していてもよい。
この場合、前記アライメントマークを撮像するための撮像部が、前記基準マークを撮像するための撮像部として用いられてもよい。
【0021】
スクリーン印刷装置等の基板処理装置は、一般的に基板上に設けられたアライメントマークを撮像するための撮像部を有している。そして、この基板処理装置では、基板上のアライメントマークを撮像するための撮像部が、基準マークを撮像するための撮像部として用いられている。従って、既存の撮像部(基板上のアライメントマーク撮像用の撮像部)を基準マーク撮像用の撮像部として用いることができるので、基準マーク撮像用の撮像部を特別に基板処理装置に設ける必要がない。従って、コストをさらに削減することができる。
【0022】
上記基板処理装置において、前記偏心カムは、略円柱形状であってもよい。
【0023】
本技術では、上記したように、偏心カムの回転に応じて移動する基準マークを撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量が測定されるので、偏心カムの形状が複雑な形状である必要がない。すなわち、偏心カムが略円柱形状のような単純な形状(カム曲線が考慮されていない単純な形状)であっても、正確に偏心カムの回転に対するテーブルの移動量を測定することができる。そして、この基板処理装置のように、偏心カムが略円柱形状とされることでコストをさらに削減することができる。
【0024】
本技術の一形態に係るテーブル機構は、テーブルと、偏心カム機構と、基準マークと、撮像部と、制御部とを具備する。
前記テーブルは、基板を位置決めするためのテーブルである。
前記偏心カム機構は、回転により前記テーブルを移動させる偏心カムを有する。
前記基準マークは、前記テーブルの移動に応じて移動する。
前記撮像部は、前記基準マークを撮像するための撮像部である。
前記制御部は、前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする。
【0025】
本技術の一形態に係る位置決め方法は、基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させることを含む。
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量が測定される。
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板が位置決めされる。
【0026】
本技術の一形態に係るプログラムは、基板処理装置に、基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させるステップを実行させる。
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定するステップを実行させる。
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めするステップを実行させる。
【発明の効果】
【0027】
以上のように、本技術によれば、コストを削減しつつ正確に基板を位置決めすることができる基板処理装置等の技術を提供することができる。
【図面の簡単な説明】
【0028】
【図1】本技術の一実施形態に係るスクリーン印刷装置を示す正面図である。
【図2】スクリーン印刷装置を示す側面図である。
【図3】位置決め機構を示す斜視図である。
【図4】図3に示すA方向から位置決め機構を見た場合の側面図である。
【図5】図3に示すB方向から位置決め機構を見た場合の側面図である。
【図6】テーブル機構を示す斜視図である。
【図7】図6に示すA方向からテーブル機構を見た場合の斜視図である。
【図8】偏心カム機構を示す斜視図である。
【図9】偏心カムの動きと、センサ部との関係を示す模式図である。
【図10】校正シーケンス時のスクリーン印刷装置の処理を示す図である。
【図11】校正シーケンス時のスクリーン印刷装置の処理を示す図である。
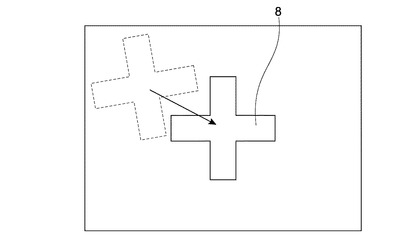
【図12】基準マークが撮像視野の中心に位置したときの様子を示す図である。
【図13】実際に測定された、偏心カムの回転に対するテーブルの移動量(基準マークの移動量)の軌跡と、中心位置補正後の、偏心カムの回転に対するテーブルの移動量(基準マークの移動量)の軌跡との関係を示す図である。
【図14】基準位置登録シーケンスを示す図である。
【図15】基板位置決めシーケンスを示す図である。
【発明を実施するための形態】
【0029】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
【0030】
[スクリーン印刷装置100の全体構成]
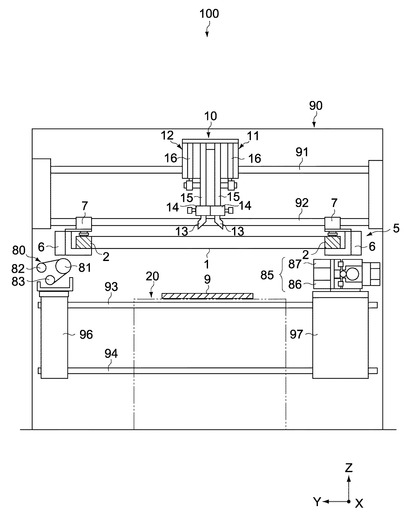
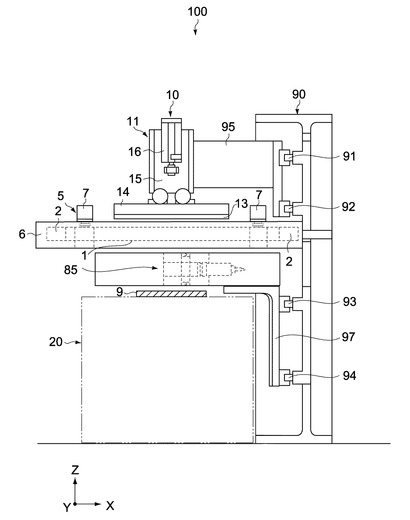
図1は、本実施形態に係るスクリーン印刷装置100を示す正面図である。図2は、スクリーン印刷装置100を示す側面図である。なお、本明細書中で説明する、各図では、図面を分かりやすく表示するため、スクリーン印刷装置100や、スクリーン印刷装置100が有する各部材等の大きさを実際の寸法とは異なって表示する場合がある。
【0031】
これらの図に示すように、スクリーン印刷装置100(基板処理装置)は、スクリーン1と、スクリーン1をスクリーン印刷装置100の所定位置に固定する固定部5とを備えている。また、スクリーン印刷装置100は、スクリーン1の上方に配置され、クリーム半田が供給されたスクリーン1上をスライドされるスキージ部10を備えている。
【0032】
また、スクリーン印刷装置100は、スクリーン1の下方に配置された位置決め機構20と、撮像部85と、クリーニング部80とを備えている。位置決め機構20は、スクリーン印刷の対象となる基板9をスクリーン1に対して位置決めする。撮像部85は、基板9上に設けられたアライメントマークや、スクリーン1の下側に設けられたアライメントマーク、基板吸着ステージ上等に設けられた基準マーク8(図12参照)等を撮像する。クリーニング部80は、スクリーン1の下面をクリーニングする。
【0033】
さらに、スクリーン印刷装置100は、スクリーン印刷装置100の背面側で、スキージ部10、クリーニング部80及び撮像部85を移動可能に支持する支持ベース90を備えている。
【0034】
なお、図示は省略しているが、スクリーン印刷装置100は、スクリーン印刷装置100の各部を統括的に制御するCPU(Central Processing Unit)等の制御部を有している。また、スクリーン印刷装置100は、制御部の作業用の領域として用いられる不揮発性のメモリと、制御部の処理に必要な各種のプログラムが記憶された不揮発性のメモリとを含む記憶部を有している。上記各種のプログラムは、光ディスク、半導体メモリ等の可搬性の記録媒体から読み取られても構わない。
【0035】
スクリーン1は、基板9の配線パターンに応じたパターン孔を有している。スクリーン1は、ステンレス鋼などの金属により構成され、スクリーン1には、スクリーン1の四辺に沿って枠体2が設けられる。枠体2は、スクリーン1にたるみが生じないように、4方向から所定の張力でスクリーン1を引っ張っている。
【0036】
スクリーン1の下面には、基板9との位置合わせ用のアライメントマークが2箇所に設けられている。この2つのアライメントマークは、例えば、パターン孔が設けられた領域を挟んで対角線上の位置に配置される。これに対して、基板9上にもスクリーン1との位置合わせ用のアライメントマークが2箇所に設けられている。この2つのアライメントマークは、例えば、基板9上において、対角線上の位置に配置される。
【0037】
スクリーン1をスクリーン印刷装置100の所定の位置に固定する固定部5は、取り付けフレーム6と、取り付けフレーム6に設けられ、スクリーン1をクランプするスクリーンクランプ7とを有する。取り付けフレーム6は、支持ベース90や、図示しない支持体などにより支持されている。スクリーンクランプ7は、取り付けフレーム6に複数個設けられる。スクリーンクランプ7は、スクリーン1に設けられた枠体2を上下方向から挟み込んで固定する。
【0038】
支持ベース90の上部側には、Y軸方向に沿って一対の上部案内レール91、92が設けられる。また、支持ベース90下部側には、Y軸方向に沿って一対の下部案内レール93、94が設けられる。
【0039】
上部案内レール91、92には、スキージ部10を支持するキャリッジ95が移動可能に取り付けられている。スキージ部10及びキャリッジ95は、例えば、ボールネジ及びモータ等で構成される駆動機構の駆動により、支持ベース90に対してY軸方向に沿って移動される。
【0040】
スキージ部10は、第1のスキージ機構11と、第1のスキージ機構11と対称に配置される第2のスキージ機構12とを有する。第1のスキージ機構11及び第2のスキージ機構12は、それぞれ、スキージ13と、スキージ保持部材14と、支持部材15と、エアシリンダ16とを含む。
【0041】
スキージ13は、クリーム半田が供給されたスクリーン1上をスライドされて、スクリーン1に設けられたパターン孔を介して基板9上にクリーム半田を塗布する。スキージ保持部材14は、スキージ13を保持し、支持部材15は、スキージ保持部材14を支持する。エアシリンダ16は、支持部材15を支持し、支持部材15、スキージ保持部材14及びスキージ13を一体的に上下方向に駆動させる。
【0042】
一方のスキージ機構が下方に位置してスクリーン1上をスライドされているとき、他方のスキージ機構は、上方に位置しており、スクリーン1には当接しない状態とされる。スクリーン1上をスライドされるスキージ機構は、交互に切り替えられる。
【0043】
支持ベース90の下部側に設けられた下部案内レール93、94には、撮像部85を支持するキャリッジ97と、クリーニング部80を支持するキャリッジ96とが移動可能に取り付けられている。
【0044】
撮像部85及びキャリッジ97は、ボールネジ及びモータ等の駆動機構の駆動により支持ベース90に対してY軸方向に沿って移動される。撮像部85は、キャリッジ97に対してX軸方向に移動可能に取り付けられており、ボールネジ及びモータ等の駆動機構の駆動によりキャリッジ97に対してX軸方向に沿って移動される。これにより、撮像部85は、Y軸方向及びX軸方向に沿って移動可能とされる。
【0045】
上記した案内レール93、94、キャリッジ97、撮像部85を駆動させる駆動機構などにより、撮像部85を移動させる移動機構が構成される。
【0046】
撮像部85は、下側に向けて配置された第1の撮像部86と、上側に向けて配置された第2の撮像部87とを含む。下側に向けて配置された第1の撮像部86は、基板9上に設けられたアライメントマークと、基板吸着ステージ上等に設けられた基準マーク8(図12参照)とを撮像する。上側に向けて配置された第2の撮像部87は、スクリーン1の下面側に設けられたアライメントマークを撮像する。
【0047】
第1の撮像部86及び第2の撮像部87は、それぞれ、CCDセンサ(CCD:Charge Coupled Device)、あるいはCMOSセンサ(CMOS:Complementary Metal Oxide Semiconductor)等の撮像素子と、結像レンズ等の光学系とを含む。
【0048】
図1及び図2では、2つの撮像部86、87が設けられる場合の一例が示されているが、撮像部の数は、1つとすることも可能である。撮像部が1つである場合、撮像部は、例えば、X軸方向の軸を回転の中心軸として回転可能(回動可能)に構成されればよい。
【0049】
クリーニング部80及びキャリッジ96は、ボールネジ及びモータ等の駆動機構の駆動により支持ベース90に対してY軸方向に沿って移動される。クリーニング部80は、ローラ81と、クリーニングテープを送り出す送り出しローラ82と、クリーニングテープを巻き取る巻き取りローラ83とを有する。
【0050】
クリーニング部80がY軸方向に沿って移動されると、それに連動して、ローラ81、送り出しローラ82及び巻き取りローラ83が回転される。送り出しローラ82から送り出されたクリーニングテープは、スクリーン1の下面に当接しながらローラ81の周囲を回転し、巻き取りローラ83により巻き取られる。これにより、スクリーン1の下面がクリーニングされる。
【0051】
[位置決め機構20の構成]
図3は、位置決め機構20を示す斜視図である。図4は、図3に示すA方向から位置決め機構20を見た場合の側面図であり、図5は、図3に示すB方向から位置決め機構20を見た場合の側面図である。
【0052】
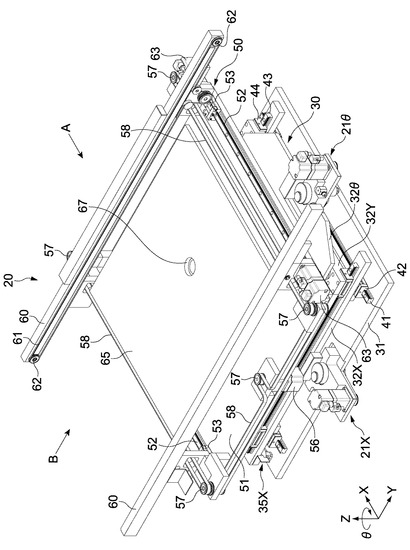
図3〜図5に示すように、位置決め機構20は、基板9を位置決めするためのテーブル機構30と、テーブル機構30上に設けられ、基板9を保持する基板保持機構50とを有する。
【0053】
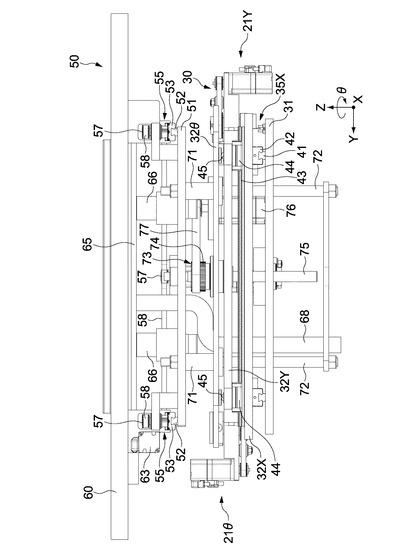
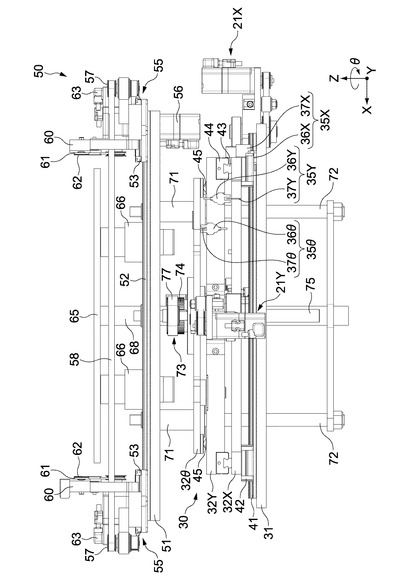
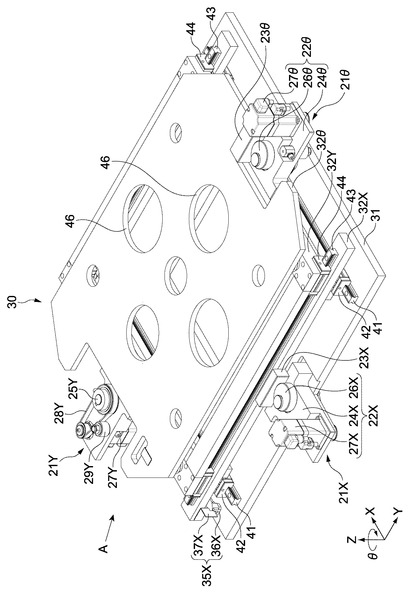
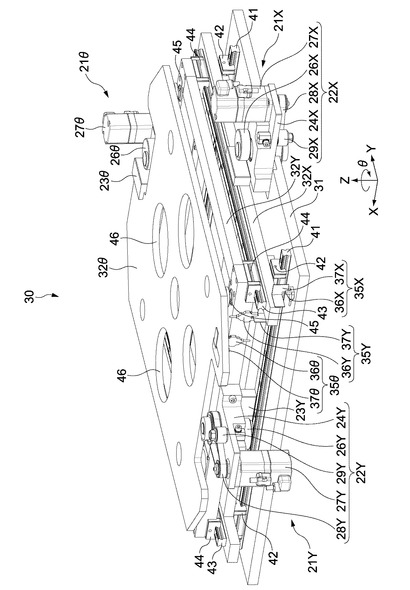
図6は、テーブル機構30を示す斜視図である。図7は、図6に示すA方向からテーブル機構30を見た場合の斜視図である。
【0054】
(テーブル機構30の構成)
図6及び図7を参照して、まず、テーブル機構30の構成について説明する。
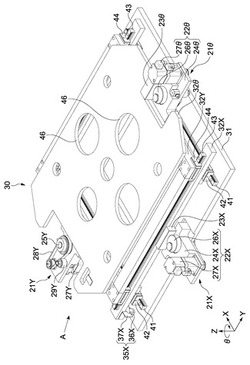
テーブル機構30は、ベース31と、ベース31上に設けられたフレーム状のX軸テーブル32Xと、X軸テーブル32X上に設けられたフレーム状のY軸テーブル32Yと、Y軸テーブル32Y上に設けられたθ軸テーブル32θとを有する。また、テーブル機構30は、X軸テーブル32Xを移動させるX軸偏心カム機構21Xと、Y軸テーブル32Yを移動させるY軸偏心カム機構21Yと、θ軸テーブル32θを回転(移動)させるθ軸偏心カム機構21θとを有する。各軸の偏心カム機構21は、同様の構成を有している。
【0055】
ベース31上には、X軸方向に沿って2本のガイドレール41が設けられている。X軸テーブル32Xは、この2本のガイドレール41上にスライド可能に取り付けられたスライド部材42上に設けられている。X軸テーブル32X上には、Y軸方向に沿って2本のガイドレール43が設けられている。Y軸テーブル32Yは、この2本のガイドレール43上にスライド可能に取り付けられたスライド部材44上に設けられている。
【0056】
Y軸テーブル32Y上において、4つの角部の近傍には、それぞれ半球状の支持体45が設けられる(図4、図5参照)。この4つの支持体45によりθ軸テーブル32θの回転が支持される。
【0057】
θ軸テーブル32θには、複数の穴46が形成されている。この複数の穴46は、基板保持機構50を昇降させる昇降機構を取り付けたりするために用いられたり、吸引用チューブ68を通すために用いられたりする。
【0058】
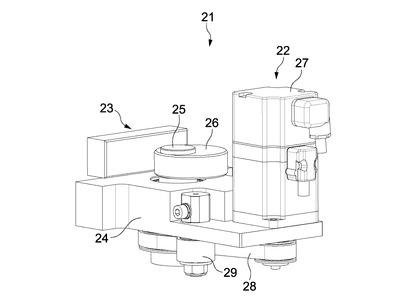
図8は、偏心カム機構21を示す斜視図である。図8に示すように偏心カム機構21は、偏心カム機構本体22と、カム受けブロック23とを有する。偏心カム機構本体22は、基部24と、基部24に回転可能に軸支される軸体25と、軸体25の一端部側に固定され、回転によりテーブル32を移動させる偏心カム26と、基部24に取り付けられたカム駆動用モータ27とを有する。また、偏心カム機構本体22は、カム駆動用モータ27の出力軸及び軸体25の他端部側の間に掛け渡されたタイミングベルト28と、タイミングベルト28のテンション調整用の回転体29とを有する。
【0059】
偏心カム26は、鉄、コバルト、ニッケル等の磁性体で構成される。この偏心カム26は、カム曲線等が考慮された複雑な形状とはされておらず、単純な円柱形状とされる。
【0060】
カム受けブロック23は、内部にマグネットを有している。なお、カム受けブロック23の全体がマグネットで構成されていても構わない。
【0061】
このように、偏心カム26が磁性体で構成され、カム受けブロック23がマグネットで構成されているため、偏心カム26と、カム受けブロック23とが磁力により引き合う。従って、偏心カム26の回転により一方向に移動させたテーブル32を、逆方向に戻すことができる。
【0062】
偏心カム26の回転によりテーブル32を移動させる場合、一端、偏心カム26により送り出されたテーブル32を逆方向に戻すための戻り機構が必要となる。この戻り機構として、本実施形態では、磁性体と、マグネットとが引き合う力が利用されている。
【0063】
再び図6及び図7を参照して、X軸の偏心カム機構本体22Xは、ベース31上において、ベース31の縁部の近傍に取り付けられる。一方、X軸のカム受けブロック23Xは、X軸テーブル32Xの側面に取り付けられる。カム駆動用モータ27Xの駆動によりX軸偏心カム26Xが回転すると、X軸のカム受けブロック23XがX軸偏心カム26Xの回転に追従して移動し、X軸テーブル32XがX軸方向に移動する。X軸テーブル32XがX軸方向に移動した場合、X軸テーブル32X上に設けられたY軸テーブル32Yと、θ軸テーブル32θと、基板保持機構50とが一体的にX軸方向に移動する。
【0064】
Y軸の偏心カム機構本体22Yは、Y軸テーブル32Yの側面に、上下逆に取り付けられている。一方、Y軸のカム受けブロック23Yは、X軸テーブル32Xの側面に取り付けられる。カム駆動用モータ27Yの駆動によりY軸偏心カム26Yが回転すると、Y軸の偏心カム機構本体22Yが取り付けられた側のY軸テーブル32YがY軸偏心カム26Yの回転に応じてY軸方向に移動する。Y軸テーブル32YがY軸方向に移動した場合、Y軸テーブル32Y上に設けられたθ軸テーブル32θと、基板保持機構50とが一体的にY軸方向に移動する。
【0065】
θ軸の偏心カム機構本体22θは、Y軸テーブル32Yの側面に取り付けられる。つまり、Y軸偏心カム機構21Yの偏心カム機構本体22Yと、θ軸偏心カム機構21θの偏心カム機構本体22θとは、同じテーブル32(Y軸テーブル32Y)に取り付けられる。一方、θ軸のカム受けブロック23θは、θ軸テーブル32θに取り付けられる。カム駆動用モータ27θの駆動によりθ軸偏心カム26θが回転すると、θ軸のカム受けブロック23θがθ軸偏心カム26θの回転に追従して移動し、θ軸テーブル32θがZ軸回りに回転する。θ軸テーブル32θがZ軸回りに回転した場合、θ軸テーブル32θ上に設けられた基板保持機構50が、θ軸テーブル32θと一体的に回転する。
【0066】
本実施形態に係るスクリーン印刷装置100では、テーブル32を駆動させる機構として偏心カム26を有する偏心カム機構21が用いられている。従って、ボールネジ等を用いたテーブル32駆動機構に比べて、コストを削減することができる。
【0067】
さらに本実施形態では、一端、偏心カム26により送り出されたテーブル32を逆方向に戻すための戻り機構として、マグネットが用いられた方式が採用されているので、コスト削減及びコンパクト化の観点から有利である。一方、戻り機構としては、マグネットが用いられる方式の代わりに、例えば、バネや、エアシリンダ等を用いた方式が採用されてもよい。
【0068】
例えば、X軸テーブル32Xで説明すると、X軸の偏心カム機構本体22Xが設けられた側に向けてX軸テーブル32Xを引き寄せるバネ部材がX軸偏心カム機構21Xに設けられる。あるいは、X軸の偏心カム機構本体22Xが設けられた側に向けてX軸テーブル32Xを押し付けるエアシリンダ(あるいは、バネ部材)が、X軸テーブル32Xを挟んでX軸の偏心カム機構本体22Xとは反対側の位置に設けられる。なお、コスト削減及びコンパクト化の観点からは、上記したマグネットを用いた方式が特に有効である。
【0069】
また、本実施形態のように、偏心カム機構21が用いられる形態の場合、偏心カム機構21をテーブル32の外側に配置することができるので、メンテナンスが容易となる。また、偏心カム機構21が用いられる形態の場合、各軸の偏心カム機構21の部品の共通化も容易である。
【0070】
また、偏心カム26は、回転範囲がカムストローク中心から最大でも±90°程度とされるので、低回転数で動作可能である。従って、カム駆動用モータ27の選定範囲が広く、安価なカム駆動用モータ27も使用可能である。
【0071】
さらに、本実施形態のように、偏心カム機構21が用いられる形態の場合、テーブル32は、偏心カム26の回転範囲で移動するため、可動範囲が小さい。従って、カム駆動用モータ27が暴走した際にテーブル32の動作を規制するための規制機構や、テーブル32の過剰動作を検出するセンサ等も不要である。このような観点からも、本実施形態では、コスト削減が可能であることが分かる。
【0072】
図6及び図7等に示す一例では、Y軸偏心カム機構21Yについて、偏心カム機構本体22Yが上下逆にY軸テーブル32Yに取り付けられ、カム受けブロック23がX軸テーブル32Xに取り付けられているが、これは、逆であってもよい。つまり、偏心カム機構本体22Yが(上下逆でなく)X軸テーブル32Xに取り付けられ、カム受けブロック23YがY軸テーブル32Yに取り付けられてもよい。
【0073】
しかしながら、この場合、Y軸の偏心カム機構本体22Yと、θ軸の偏心カム機構本体22θとがそれぞれ別のテーブル32に取り付けられることになる。この場合、Y軸の偏心カム機構本体22Yと、θ軸の偏心カム機構本体22θとがそれぞれ別々の動きをしてしまう。この場合、Y軸のカム駆動用モータ27Yに接続される電力供給用のケーブルと、θ軸のカム駆動用モータ27θに接続される電力供給用のケーブルとが別々の動きをしてしまうため、これらのケーブルの扱いが複雑になってしまう恐れがある。
【0074】
一方、Y軸の偏心カム機構本体22Yが上下逆にY軸テーブル32Yに取り付けられ、カム受けブロック23YがX軸テーブル32Xに取り付けられ場合、Y軸の偏心カム機構本体22Yと、θ軸の偏心カム機構本体22θとが同じテーブル32(Y軸テーブル32Y)に取り付けられることになる。この場合、Y軸のカム駆動用モータ27Yに接続される電力供給用のケーブルと、θ軸のカム駆動用モータ27θに接続された電力供給用のケーブルとが同じような動きをする。従って、これらのケーブルの扱いが複雑となってしまうことを防止することができる。
【0075】
図7を参照して(図5も参照)、テーブル機構30は、X軸偏心カム機構21X、Y軸偏心カム機構21Y、θ軸偏心カム機構21θそれぞれについての偏心カム26の仮のカムストローク中心(大まかなカムストローク中心)を検出するためのセンサ部35を有している。
【0076】
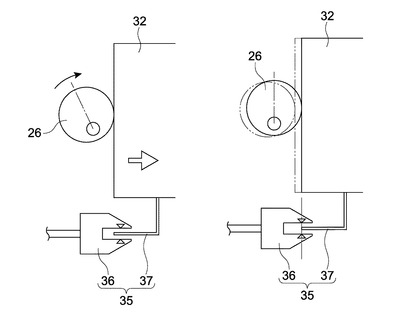
X軸偏心カム26Xの仮のカムストローク中心を検出するセンサ部35Xは、ベース31に取り付けられた光センサ36Xと、X軸テーブル32Xに取り付けられたセンサ検出用の板材37Xとを有する。Y軸偏心カム26Yの仮のカムストローク中心を検出するセンサ部35Yは、Y軸テーブル32Yに取り付けられた光センサ36Yと、X軸テーブル32Xに取り付けられたセンサ検出用の板材37Yとを有する。θ軸偏心カム26θの仮のカムストローク中心を検出するセンサ部35θは、Y軸テーブル32Yに取り付けられた光センサ36θと、θ軸テーブル32θに取り付けられた板材37θとを有する。
【0077】
光センサ36が取り付けられる位置と、板材37が取り付けられる位置とは、逆であってもよい。例えば、X軸について説明すると、X軸テーブル32Xに光センサ36Xが取り付けられ、ベース31に板材37Xが取り付けられても構わない。
【0078】
図9は、偏心カム26の動きと、センサ部35との関係を示す模式図である。図9(A)に示すように、偏心カム26の回転によりテーブル32が移動すると、テーブル32に取り付けられた板材37が移動する。そして、偏心カム26が図9(B)に示す位置まで回転すると、光センサ36による受光状態と、非受光状態とが切り替えられる。これにより、偏心カム26の仮のカムストローク中心が検出される。図9(B)に示す偏心カム26の位置が、偏心カム26の仮のカムストローク中心である。
【0079】
(基板保持機構50の構成)
次に、図3〜図5を参照して、基板保持機構50の構成について説明する。これらの図に示すように、基板保持機構50は、θ軸テーブル32θ上に配置されたベース51と、ベース51上に配置された2つのベルト保持部材60と、ベース51上に配置されたステージ支持部材65とを有する。2つのベルト保持部材60は、Y軸方向に沿って配置され、基板9を搬送するコンベアベルト61を保持する。ステージ支持部材65は、基板9を吸着保持する基板吸着ステージ(図示せず)を下方から支持する。
【0080】
θ軸テーブル32θ上には、4本のz軸ガイド71が固定され、ベース51は、この4本のz軸ガイド71上に配置される。なお、ベース51は、z軸ガイド71には、固定されていない。ベース51には、ベース51の下側に向けて伸びる、z軸ガイド71にガイドされる4本のシャフト72が固定されている。
【0081】
θ軸テーブル32θの中央の位置には、ロータリーボールネジ73が設けられている。ロータリーボールネジ73は、θ軸テーブル32θの中央の上部に、Z軸回りに回転可能に設けられたボールネジナット74と、ボールネジナット74の回転に応じて上下方向に移動するボールネジ75とを含む。ボールネジ75の上側の端部は、ベース51の下面と当接している。
【0082】
θ軸テーブル32θの下側には、ロータリーボールネジ73の駆動源としてのモータ76が取り付けられている。このモータ76の出力軸は、θ軸テーブル32θの上側の位置に配置され、この出力軸と、ボールネジナット74との間には、ベルト77が掛けられている。これにより、モータ76が駆動されると、ベルト77によりモータ76の駆動がボールネジナット74に伝達されてボールネジナット74が回転し、ボールネジナット74の回転に応じて、ボールネジ75が上下方向に移動する。ボールネジ75が上下方向に移動すると、ベース51の下側に設けられた4本のシャフト72が、θ軸テーブル32θの上側に設けられた4本のz軸ガイド71に案内されつつ、ベース51がθ軸テーブル32θに対して上下方向に移動する。これにより、テーブル機構30に対して、基板保持機構50が上下方向にする。
【0083】
ベース51上には、2本のガイドレール52がX軸方向に沿って配置されている。この2本のガイドレール上には、それぞれ、ガイドレール52上をスライドする2つのスライド部材53が設けられている。ベルト保持部材60は、一方のガイドレール52上をスライド可能なスライド部材53と、他方のガイドレール52上をスライド可能なスライド部材53との上方に取り付けられている。これにより、2つのベルト保持部材60は、それぞれX軸方向に沿って移動可能とされる。
【0084】
ベース51上において、2つのベルト保持部材60のX軸方向の外側の位置には、2つのベルト保持部材60の間の、X軸方向での幅を調整する幅調整機構55が設けられている。ベース51の下側には、幅調整機構55の駆動源としての幅調整用モータ56が取り付けられている。ベース51上には、ベース51の縁部に沿うようにして、複数のプーリ57と、複数のベルト58が設けられている。この複数のプーリ57と、複数のベルト58とによって、幅調整用モータ56の駆動が幅調整機構55に伝達される。幅調整機構55により、基板9の幅に応じて、2つのベルト保持部材60の間の距離を調整することができる。
【0085】
ベルト保持部材60の内面側には、複数のプーリ62が回転可能に設けられている。この複数のプーリ62に対して、Y軸方向に長い形状のコンベアベルト61が掛けられている。ベルト保持部材60の外面側には、コンベア駆動用モータ63が取り付けられており、コンベア駆動用モータ63の出力軸がコンベアベルト61に掛けられている。このコンベア駆動用モータ63の駆動により、コンベアベルト61が回転され、コンベアベルト61上の基板9が搬送される。
【0086】
ベース51上には、4本の円柱状の支持体66が設けられており、この4本の支持体66上に、基板9を吸着保持する基板吸着ステージ(図示せず)を下方から支持するステージ支持部材65が設けられている。この4本の支持体66は、ベース51に対するステージ支持部材65の高さを調整可能なように構成されている。ステージ支持部材65の中央近傍には、上下方向に貫通する穴67が設けられており、この穴には、吸引用チューブ68が接続される。吸引用チューブ68は、図示しないエアコンプレッサ等に接続されている。エアコンプレッサの駆動により、基板9が基板吸着ステージによって吸着保持されて、基板9の位置ずれが防止される。
【0087】
基板吸着ステージ上、ステージ支持部材65上、基板保持機構50のベース51上、あるいは、ベルト保持部材60上には、後述の校正シーケンス時に、撮像部85により撮像される基準マーク8(図12参照)が設けられる。この基準マーク8は、上記した部材上に特別に設けられてもよいし、上記部材上に既にある穴等の形状が基準マーク8として用いられてもよい。基準マーク8が設けられる位置は、典型的には、テーブル機構30の駆動とともに移動する部材上に設けられており、かつ、撮像部85が撮像可能な位置に設けられていれば、どのような位置に設けられていても構わない。
【0088】
[動作説明]
次に、本実施形態に係るスクリーン印刷装置100の処理について説明する。
【0089】
(校正シーケンス)
まず、偏心カム26の個体差によるバラつきなどに起因する、制御部によるテーブル32の移動の指令値と、実際のテーブル32の移動値との差を画像処理によって確認する校正シーケンスの際の処理について説明する。この校正シーケンスは、例えば、スクリーン印刷装置100の出荷時や、スクリーン印刷装置100のメンテナンス時に実行される。
【0090】
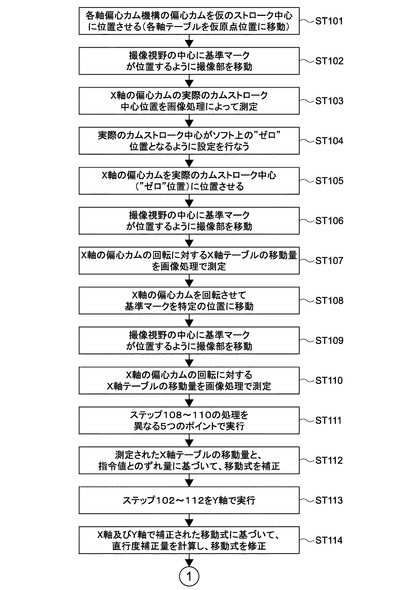
図10及び図11は、校正シーケンス時のスクリーン印刷装置100の処理を示す図である。まず、制御部は、各軸偏心カム機構21の偏心カム26を仮のカムストローク中心(大まかなカムストローク中心)に位置させる(ステップ101)(図9参照)。
【0091】
この場合、まず、制御部は、各軸偏心カム機構21のカム駆動用モータ27を駆動させて、各軸の偏心カム26を回転させる。偏心カム26が回転されると、偏心カム26の回転に追従してカム受けブロック23が移動し(Y軸偏心カム機構21Yでは、Y軸の偏心カム26Y側が移動)、各軸のテーブル32が移動される。各軸のテーブル32が移動されると、センサ部35の光センサ36と、センサ検出用の板材37との相対位置が変化して、特定の位置で、光センサ36による受光状態と、非受光状態とが切り替えられる。
【0092】
制御部は、光センサ36による受光状態と、非受光状態とが切り替えられる位置で、カム駆動用モータ27の駆動を停止する。これにより、各軸の偏心カム機構21の偏心カム26が仮のカムストローク中心に位置する。そして、各軸のテーブル32が仮の原点位置に移動する。
【0093】
このような処理により、制御部が実際のカムストローク中心を未だ認識していない状態(例えば、電源投入時)でも、制御部は、偏心カム26のおおよそのカムストローク中心を認識することができる。
【0094】
次に、制御部は、撮像部85の移動機構により、第1の撮像部86(下向のカメラ)の撮像視野の中心に基準マーク8が位置するように第1の撮像部86を移動させる(ステップ102)。この場合、制御部は、第1の撮像部86によって取得された基準マーク8を含む画像の情報に基づいて、撮像視野の中心に基準マーク8が位置するように撮像部85を移動させる。図12には、基準マーク8が撮像視野の中心に位置したときの様子が示されている。
【0095】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、X軸偏心カム26Xの実際のカムストローク中心を測定する(ステップ103)。この場合、まず、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、仮のカムストローク中心に位置する状態のX軸偏心カム26Xを回転させ、X軸テーブル32Xを移動させる。このX軸テーブル32Xの移動に応じて基準マーク8が第1の撮像部86の撮像視野内で移動する。制御部は、撮像視野内で移動する基準マーク8の画像に基づいて、X軸偏心カム26Xの実際のカムストローク中心を測定する。
【0096】
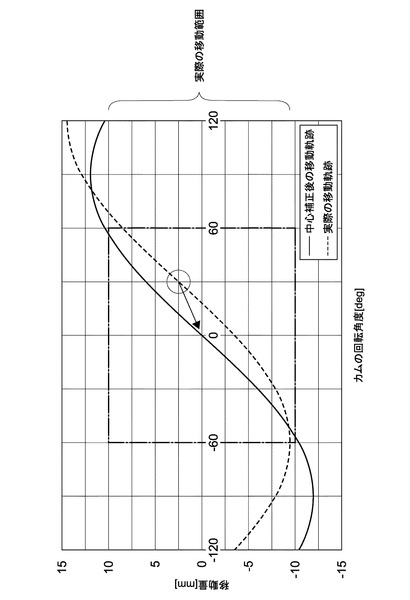
図13は、実際に測定された、偏心カム26の回転に対するテーブル32の移動量(基準マーク8の移動量)の軌跡と、後述の中心位置補正後の、偏心カム26の回転に対するテーブル32の移動量(基準マーク8の移動量)の軌跡との関係を示す図である。
【0097】
図13中、破線で示すように、テーブル32の移動量(基準マーク8の移動量)は、偏心カム26の回転に対して正弦波状の軌跡を描く。正弦波状の軌跡の原点位置が実際のカムストローク中心である。制御部は、この実際のカムストローク中心の位置を、第1の撮像部86によって撮像された画像に基づいて測定する。
【0098】
上記したように、本実施形態では、基準マーク8を第1の撮像部86の撮像視野の中心に位置させた後に、偏心カム26を回転させて、基準マーク8を撮像視野内で移動させているので、撮像部85のレンズの歪みの影響を排除することができる。従って、偏心カム26の回転に対するテーブル32の移動量の軌跡を正確に測定することができ、これにより、実際のカムストローク中心を正確に測定することができる。
【0099】
次に、制御部は、測定された実際のカムストローク中心がソフトウェア上のゼロ位置となるように、設定を行なう(ステップ104)。図13には、この設定が実行されたされたときの様子が示されている。
【0100】
次に、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、X軸偏心カム26Xが実際のカムストローク中心(ゼロ位置)に位置するようにX軸偏心カム26Xを回転させる(ステップ105)。
【0101】
次に、制御部は、X軸偏心カム26Xが実際のカムストローク中心に位置する状態で、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように、第1の撮像部86を移動させる(ステップ106)。
【0102】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する(ステップ107)。この場合、まず、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、実際のカムストローク中心に位置する状態のX軸偏心カム26Xを回転させ、X軸テーブル32Xを移動させる。このX軸テーブル32Xの移動に応じて基準マーク8が第1の撮像部86の撮像視野内で移動する。制御部は、撮像視野内で移動する基準マーク8の画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する。
【0103】
このように、本実施形態では、偏心カム26が実際のストローク中心に位置する状態から偏心カム26が回転され、偏心カム26の移動に応じて撮像視野内で移動する基準マーク8の画像に基づいて、偏心カム26の回転に対するテーブル32の移動量が測定される。これにより、偏心カム26の回転に対するテーブル32の移動量を正確に測定することができる。
【0104】
さらに、基準マーク8を第1の撮像部86の撮像視野の中心に位置させた後に、偏心カム26を回転させて、基準マーク8を撮像視野内で移動させているので、撮像部85のレンズの歪みの影響を排除することができる。従って、偏心カム26の回転に対するテーブル32の移動量を、さらに正確に測定することができる。後述のY軸及びθ軸についても同様の効果を得ることができる。
【0105】
次に、制御部は、X軸偏心カム26Xを実際のカムストローク中心から所定の回転量分、回転させて、基準マーク8を特定の位置に移動させる(ステップ108)。そして、制御部は、撮像部85の移動機構により、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように第1の撮像部86を移動させる(ステップ109)。これにより、撮像部85のレンズの歪みの影響を排除することができる。
【0106】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する(ステップ110)。ステップ110では、まず、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、X軸偏心カム26Xを回転させ、X軸テーブル32Xを移動させる。制御部は、X軸テーブル32Xの移動に応じて第1の撮像部86の撮像視野内で移動する基準マーク8の画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する。
【0107】
制御部は、ステップ108〜110の処理を異なる5つのポイントで実行する(ステップ111)。
【0108】
次に、制御部は、測定によって得られた、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量と、制御部が有している、X軸テーブル32Xを移動させるための指令値とのずれ量とを算出する。そして、制御部は、算出されたずれ量に基づいて、X軸テーブル32Xの移動に用いられる移動式を補正する(ステップ112)。
【0109】
次に、制御部は、ステップ102〜ステップ112の処理をY軸偏心カム機構21Y、Y軸テーブル32Yで実行する(ステップ113)。
【0110】
次に、制御部は、X軸及びY軸で補正された移動式に基づいて、直交度補正量を計算し、この直交度補正量に基づいて、X軸テーブル32X及びY軸テーブル32Yを移動させるための移動式を修正する(ステップ114)。これにより、X軸テーブル32Xの移動に用いられる移動式と、Y軸テーブル32Yの移動に用いられる移動式とを正確に補正することができる。
【0111】
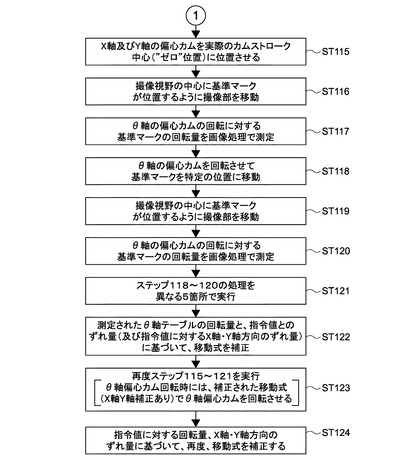
次に、制御部は、X軸及びY軸のカム駆動用モータ27X、27Yを駆動させ、X軸偏心カム26X及びY軸偏心カム26Yを実際のカムストローク中心(ゼロ位置)に移動させる(ステップ115)。そして、制御部は、X軸偏心カム26X及びY軸偏心カム26Yが実際のカムストローク中心に位置する状態で、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように、第1の撮像部86を移動させる(ステップ116)。
【0112】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する(ステップ117)。ステップ117では、まず、制御部は、θ軸のカム駆動用モータ27θを駆動させて、θ軸偏心カム26θを回転させ、θ軸テーブル32θを回転させる。制御部は、θ軸テーブル32θの回転に応じて第1の撮像部86の撮像視野内で移動する基準マーク8の画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する。
【0113】
次に、制御部は、θ軸偏心カム26θを所定の回転量分、回転させて、基準マーク8を特定の位置に移動させる(ステップ118)。そして、制御部は、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように第1の撮像部86を移動させる(ステップ119)。
【0114】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する(ステップ120)。この場合、制御部は、θ軸偏心カム機構21θのカム駆動用モータ27を駆動させて、θ軸偏心カム26θを回転させ、θ軸テーブル32θを回転させる。制御部は、θ軸テーブル32θの回転に応じて第1の撮像部86の撮像視野内で移動する基準マーク8の画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する。
【0115】
制御部は、ステップ118〜ステップ120の処理を異なる5つのポイントで実行する(ステップ121)。
【0116】
次に、制御部は、測定によって得られた、θ軸偏心カム26θの回転に対するθ軸テーブル32θの移動量と、制御部が有している、θ軸テーブル32θを移動させるための指令値とのずれ量とを算出する。そして、制御部は、算出されたずれ量に基づいて、θ軸テーブル32θの移動に用いられる移動式を補正する(ステップ122)。このとき、制御部は、指令値に対する、θ軸テーブル32θのX軸方向及びY軸方向でのずれ量にも基づいて、θ軸テーブル32θの移動に用いられる移動式を補正する。
【0117】
次に、制御部は、再度、ステップ115〜ステップ121を実行する(ステップ123)。このとき、制御部は、θ軸偏心カム26θの回転時には、既に補正された移動式(X軸方向及びY軸方向の補正あり)で、θ軸偏心カム26θを回転させる。
次に、制御部は、制御部は、指令値に対する、θ軸テーブル32θの回転量と、X軸方向及びY軸方向でのずれ量とに基づいて、再度、θ軸テーブル32θの移動に用いられる移動式を補正する。これにより、θ軸テーブル32θの移動に用いられる移動式を正確に補正することができる。
【0118】
ここで、図13を参照して、偏心カム26の回転範囲について説明する。偏心カム26の回転範囲としては、カムストローク中心から±90°の範囲で使用可能である。この範囲のうち、本実施形態では、カムストローク中心から±60°の範囲を使用することとしている。これにより、偏心カム26の圧力角を小さくすることができる。
【0119】
ここで、本実施形態では、上記したように、偏心カム26の回転に応じて移動する基準マーク8を撮像部85により撮像することで、偏心カム26の回転に対するテーブル32の移動量が測定されるので、偏心カム26の形状が複雑な形状である必要がない。すなわち、偏心カム26が略円柱形状のような単純な形状(カム曲線等が考慮されていない単純な形状)であっても、正確に偏心カム26の回転に対するテーブル32の移動量を測定することができる。そして、偏心カム26が略円柱形状とされることでコストをさらに削減することができる。
【0120】
(基準位置登録シーケンス及び基板位置決めシーケンス)
次に、基準位置登録シーケンス及び基板位置決めシーケンスについて説明する。基板位置決めシーケンスは、通常生産で実行される処理であり、スクリーン1の位置に対して基板9の位置を合わせる処理である。
【0121】
基板位置決めシーケンスの前に、スクリーン1の位置に対して、基板9の基準位置が登録される(基準位置登録シーケンス)。基板位置決めシーケンスでは、基準位置登録シーケンスで登録されたスクリーン1に対する基板9の位置に対して、そのとき処理される基板9の位置がX軸、Y軸、θ軸方向でどの程度ずれているのかが判定される。そして、判定されたずれ量に基づいて、テーブル機構30によりX軸、Y軸、θ軸方向でずれ量が修正され、スクリーン1に対して基板9が正確な位置に移動される。
【0122】
(基準位置登録シーケンス)
まず、スクリーン1の位置に対して、基板9の基準位置が登録されるときの処理(基準位置登録シーケンス)について説明する。図14は、基準位置登録シーケンスを示す図である。
【0123】
まず、作業者によりスクリーン1がスクリーン印刷装置100に設置される(ステップ201)。この場合、作業者は、スクリーン1の四辺に設けられた、スクリーン1を四方向から引っ張る枠体2を、スクリーンクランプ7により上下方向から挟み込こむことで、スクリーン1をスクリーン印刷装置100に設置する。
【0124】
制御部は、撮像部85の移動機構を制御して、予め設定されたマーク位置(1)に撮像部85を移動させる(ステップ202)。そして、制御部は、第2の撮像部87(上向きのカメラ)によって、スクリーン1の下面に設けられた2つのアライメントマークのうちの一方のアライメントマークを撮像する。制御部は、撮像された画像を基準位置として登録する(ステップ203)。
【0125】
次に、制御部は、撮像部85の移動機構を制御して、予め設定されたマーク位置(2)に撮像部85を移動させる(ステップ204)。そして、制御部は、第2の撮像部87により、スクリーン1の下面に設けられた2つのアライメントマークのうちの他方のアライメントマークを撮像する。そして、制御部は、撮像された画像を基準位置として登録する(ステップ205)。
【0126】
制御部は、マーク位置(1)及びマーク位置(2)で撮像された、アライメントマークの画像に基づいて、スクリーン1の位置を認識する(ステップ206)。
【0127】
次に、印刷される基板9が投入される(ステップ207)。このとき、制御部は、コンベア駆動用モータ63の駆動によりコンベアベルト61を回転させて、コンベアベルト61上で基板9を搬送し、基板9をコンベアベルト61上の所定の位置に移動させる。そして、基板吸着ステージによって、基板9を吸着保持する。
【0128】
次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(1)に撮像部85を移動させる(ステップ208)。そして、制御部は、第1の撮像部86(下向のカメラ)により、基板9上に設けられた2つのアライメントマークのうちの一方のアライメントマークを撮像する。制御部は、撮像された画像を基準位置として登録する(ステップ209)。
【0129】
次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(2)に撮像部85を移動させる(ステップ210)。そして、制御部は、第1の撮像部86により、基板9上に設けられた2つのアライメントマークのうちの他方のアライメントマークを撮像する。制御部は、撮像された画像を基準位置として登録する(ステップ211)。
【0130】
(基板位置決めシーケンス)
次に、スクリーン1の位置に対して基板9の位置を合わせる基板位置決めシーケンスについて説明する。図15は、基板位置決めシーケンスを示す図である。
【0131】
まず、印刷される基板9が投入される(ステップ301)。次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(1)に撮像部85を移動させる(ステップ302)。そして、制御部は、第1の撮像部86により、基板9上に設けられた2つのアライメントマークのうちの一方のアライメントマークを撮像する。
【0132】
次に、制御部は、基準位置として登録された画像内のアライメントマークの位置と、撮像された画像内のアライメントマークとのずれ量を測定する(ステップ303)。
【0133】
次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(2)に撮像部85を移動させる(ステップ304)。そして、制御部は、第1の撮像部86により、基板9上に設けられた2つのアライメントマークのうちの他方のアライメントマークを撮像する。
【0134】
次に、制御部は、基準位置として登録された画像内のアライメントマークの位置と、撮像された画像内のアライメントマークとのずれ量を測定する(ステップ305)。
【0135】
次に、制御部は、マーク位置(1)及びマーク位置(2)で測定されたアライメントマークのずれ量に基づいて、基板9が、X軸、Y軸、θ軸方向で正規の位置からどの程度ずれているのかを判定する(ステップ306)。
【0136】
次に、制御部は、判定されたずれ量に基づいて、各軸の偏心カム機構21を駆動させ、各軸のテーブル32を移動させることで、基板9のずれを修正する。本実施形態では、上記したように、偏心カム26の回転に対するテーブル32の移動量が正確とされているので、正確に基板9のずれを修正することができる。
【0137】
ここで、スクリーン印刷装置100等の基板処理装置は、一般的に基板9上に設けられたアライメントマークを撮像するための撮像部85を有している。そして、本実施形態では、基板9上のアライメントマークを撮像するための撮像部85(第1の撮像部86)を、基準マーク8を撮像するための撮像部85として用いている。従って、既存の撮像部85(アライメントマーク撮像用の撮像部85)を基準マーク撮像用の撮像部85として用いることができるので、基準マーク撮像用の撮像部85を特別に基板処理装置に設ける必要がない。従って、コストをさらに削減することができる。
【0138】
[各種変形例]
上記した例では、テーブル機構30が用いられる基板処理装置の一例として、スクリーン印刷装置100を例に挙げて説明した。しかしながら、基板処理装置は、これに限られない。典型的には、基板9位置決めのためのテーブル機構30が用いられる基板処理装置であれば、本技術は、どのような基板処理装置であっても適用可能である。
【0139】
本実施形態の説明では、X軸テーブル32X、Y軸テーブル32Y及びθ軸テーブル32θの全てが偏心カム機構21の駆動により駆動されるとして説明した。しかしながら、3つのテーブル32のうち、1つ、あるいは、2つのテーブル32が偏心カム機構の駆動により駆動され、他のテーブル32が例えば、ボールネジ機構などによって駆動されても構わない。
【0140】
本技術は、以下の構成をとることもできる。
(1) 基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備する基板処理装置。
(2)上記(1)に記載の基板処理装置であって、
前記偏心カムの仮のカムストローク中心を検出するセンサをさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
(3)上記(2)に記載の基板処理装置であって、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量を測定する
基板処理装置。
(4)上記(2)に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
(5)上記(3)に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの回転に対する前記テーブルの移動量を測定する
基板処理装置。
(6)上記(1)乃至(5)のうち、何れか1つに記載の基板処理装置であって、
前記偏心カム機構は、磁性体でなる前記偏心カムと、マグネットを含むカム受けブロックとを有する
基板処理装置。
(7)上記(1)乃至(6)のうち、何れか1つに記載の基板処理装置であって、
請求項1に記載の基板処理装置であって、
前記基板は、アライメントマークを有し、
前記基板処理装置は、前記基板上のアライメントマークを撮像するための撮像部を具備し、
前記アライメントマークを撮像するための撮像部が、前記基準マークを撮像するための撮像部として用いられる
基板処理装置。
(8)上記(1)乃至(7)のうち、何れか1つに記載の基板処理装置であって、
前記偏心カムは、略円柱形状である
基板処理装置。
(9) 基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備するテーブル機構。
(10) 基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させ、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定し、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする
位置決め方法。
(11)基板処理装置に、
基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させるステップと、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定するステップと、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めするステップと
を実行させるプログラム。
【符号の説明】
【0141】
1…スクリーン
8…基準マーク
9…基板
10…スキージ部
20…位置決め機構
21…偏心カム機構
22…偏心カム機構本体
23…カム受けブロック
26…偏心カム
27…カム駆動用モータ
30…テーブル機構
31…ベース
32X…X軸テーブル
32Y…Y軸テーブル
32θ…θ軸テーブル
35…センサ部
50…基板保持機構
80…クリーニング部
85…撮像部
86…第1の撮像部
87…第2の撮像部
90…支持ベース
100…スクリーン印刷装置
【技術分野】
【0001】
本技術は、スクリーン印刷装置等の基板処理装置、基板処理装置に用いられる位置決め機構等の技術に関する。
【背景技術】
【0002】
従来から、クリーム半田を基板上に印刷するスクリーン印刷装置が広く用いられている(例えば、特許文献1、2参照)。
【0003】
スクリーン印刷装置は、パターン孔が設けられたスクリーンの上方側にスキージが配置され、下方側に基板が配置される。スクリーン上には、クリーム半田が供給され、スキージは、スクリーン上をスライドされる。スキージがスクリーン上をスライドされると、パターン孔の下側に配置された基板にクリーム半田が印刷される。
【0004】
スクリーンの下方側に位置する基板は、ステージによって保持され、このステージは、X軸テーブル、Y軸テーブル、θ軸テーブル等の位置決め機構によって支持されている。この位置決め機構によって、ステージに保持された基板がスクリーンに対して位置決めされる。X軸テーブル、Y軸テーブル、θ軸テーブル等は、一般的に、ボールネジと、ボールネジを回転させるモータとによって駆動される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−234627号公報
【特許文献2】特開2007−237668号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
各軸のテーブルがボールネジ及びモータによって駆動される場合、スクリーンに対する基板の位置決め精度は、ボールネジの加工精度と、モータの回転を検出するエンコーダの精度とに依存する。近年、モータのエンコーダの性能は向上しつつあるが、ボールネジの精密加工は、依然としてコストが高いままである。
【0007】
以上のような事情に鑑み、本技術の目的は、コストを削減しつつ正確に基板を位置決めすることができる基板処理装置等の技術を提供することにある。
【課題を解決するための手段】
【0008】
本技術の一形態に係る基板処理装置は、テーブルと、偏心カム機構と、基準マークと、撮像部と、制御部とを具備する。
前記テーブルは、基板を位置決めするためのテーブルである。
前記偏心カム機構は、回転により前記テーブルを移動させる偏心カムを有する。
前記基準マークは、前記テーブルの移動に応じて移動する。
前記撮像部は、前記基準マークを撮像するための撮像部である。
前記制御部は、前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする。
【0009】
この基板処理装置では、テーブルを駆動させる機構として偏心カムを有する偏心カム機構が用いられているため、ボールネジ等を用いたテーブル駆動機構に比べて、コストを削減することができる。さらに、本実施形態では、偏心カムの回転に応じて移動する基準マークを撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量が測定されるので、基板の位置決め時に、偏心カムの回転により正確に基板を位置決めすることができる。
【0010】
上記基板処理装置は、前記偏心カムの仮のカムストローク中心を検出するセンサをさらに具備していてもよい。
この場合、前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、前記偏心カムの実際のカムストローク中心を測定してもよい。
【0011】
この基板処理装置では、偏心カムの仮のカムストローク中心を検出するセンサを有しているので、基板処理装置がカムストローク中心を未だ認識していない状態(例えば、電源投入時)でも、基板処理装置は、偏心カムのおおよそのカムストローク中心を認識することができる。そして、この基板処理装置は、偏心カムがおおよそのカムストローク中心(仮のカムストローク中心)に位置する状態から偏心カムを回転させ、基準マークを撮像部により撮像することで、偏心カムの実際のカムストローク中心を測定している。これにより、偏心カムの実際のカムストローク中心を正確に測定することができる。
【0012】
上記基板処理装置において、前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量を測定してもよい。
【0013】
これにより、偏心カムが偏心カムの実際のカムストローク中心に位置する状態から、偏心カムを回転させて、基準マークを移動させることができるので、偏心カムの回転に対するテーブルの移動量を正確に測定することができる。
【0014】
上記基板処理装置は、前記撮像部を移動させる移動機構をさらに具備していてもよい。
この場合、前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの実際のカムストローク中心を測定してもよい。
【0015】
この基板処理装置では、偏心カムが仮のカムストローク中心に位置する状態で、撮像部の撮像視野の中心に基準マークが位置するよう撮像部が移動され、その後に、偏心カムの回転に応じて移動する基準マークが撮像される。これにより、撮像部のレンズの歪みなどによって、基準マークの位置が正確に測定されなくなってしまうことを防止することができるので、さらに正確に実際のカムストローク中心を測定することができる。
【0016】
上記基板処理装置が、前記撮像部を移動させる移動機構をさらに具備する場合、前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの回転に対する前記テーブルの移動量を測定してもよい。
【0017】
この基板処理装置では、偏心カムが実際のカムストローク中心に位置する状態で、撮像部の撮像視野の中心に基準マークが位置するよう撮像部が移動され、その後に、偏心カムの回転に応じて移動する基準マークが撮像される。これにより、撮像部のレンズの歪みなどによって、基準マークの位置が正確に測定されなくなってしまうことを防止することができるので、さらに正確に偏心カムの回転に対するテーブルの移動量を測定することができる。
【0018】
上記基板処理装置において、前記偏心カム機構は、磁性体でなる前記偏心カムと、マグネットを含むカム受けブロックとを有していてもよい。
【0019】
このような機構により、偏心カムとカム受けブロックとが引き合うので、偏心カムの回転により一方向に移動させたステージを、逆方向に戻すことができる。
【0020】
上記基板処理装置において、前記基板は、アライメントマークを有していてもよい。
この場合、前記基板処理装置は、前記基板上のアライメントマークを撮像するための撮像部を具備していてもよい。
この場合、前記アライメントマークを撮像するための撮像部が、前記基準マークを撮像するための撮像部として用いられてもよい。
【0021】
スクリーン印刷装置等の基板処理装置は、一般的に基板上に設けられたアライメントマークを撮像するための撮像部を有している。そして、この基板処理装置では、基板上のアライメントマークを撮像するための撮像部が、基準マークを撮像するための撮像部として用いられている。従って、既存の撮像部(基板上のアライメントマーク撮像用の撮像部)を基準マーク撮像用の撮像部として用いることができるので、基準マーク撮像用の撮像部を特別に基板処理装置に設ける必要がない。従って、コストをさらに削減することができる。
【0022】
上記基板処理装置において、前記偏心カムは、略円柱形状であってもよい。
【0023】
本技術では、上記したように、偏心カムの回転に応じて移動する基準マークを撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量が測定されるので、偏心カムの形状が複雑な形状である必要がない。すなわち、偏心カムが略円柱形状のような単純な形状(カム曲線が考慮されていない単純な形状)であっても、正確に偏心カムの回転に対するテーブルの移動量を測定することができる。そして、この基板処理装置のように、偏心カムが略円柱形状とされることでコストをさらに削減することができる。
【0024】
本技術の一形態に係るテーブル機構は、テーブルと、偏心カム機構と、基準マークと、撮像部と、制御部とを具備する。
前記テーブルは、基板を位置決めするためのテーブルである。
前記偏心カム機構は、回転により前記テーブルを移動させる偏心カムを有する。
前記基準マークは、前記テーブルの移動に応じて移動する。
前記撮像部は、前記基準マークを撮像するための撮像部である。
前記制御部は、前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする。
【0025】
本技術の一形態に係る位置決め方法は、基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させることを含む。
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量が測定される。
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板が位置決めされる。
【0026】
本技術の一形態に係るプログラムは、基板処理装置に、基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させるステップを実行させる。
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定するステップを実行させる。
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めするステップを実行させる。
【発明の効果】
【0027】
以上のように、本技術によれば、コストを削減しつつ正確に基板を位置決めすることができる基板処理装置等の技術を提供することができる。
【図面の簡単な説明】
【0028】
【図1】本技術の一実施形態に係るスクリーン印刷装置を示す正面図である。
【図2】スクリーン印刷装置を示す側面図である。
【図3】位置決め機構を示す斜視図である。
【図4】図3に示すA方向から位置決め機構を見た場合の側面図である。
【図5】図3に示すB方向から位置決め機構を見た場合の側面図である。
【図6】テーブル機構を示す斜視図である。
【図7】図6に示すA方向からテーブル機構を見た場合の斜視図である。
【図8】偏心カム機構を示す斜視図である。
【図9】偏心カムの動きと、センサ部との関係を示す模式図である。
【図10】校正シーケンス時のスクリーン印刷装置の処理を示す図である。
【図11】校正シーケンス時のスクリーン印刷装置の処理を示す図である。
【図12】基準マークが撮像視野の中心に位置したときの様子を示す図である。
【図13】実際に測定された、偏心カムの回転に対するテーブルの移動量(基準マークの移動量)の軌跡と、中心位置補正後の、偏心カムの回転に対するテーブルの移動量(基準マークの移動量)の軌跡との関係を示す図である。
【図14】基準位置登録シーケンスを示す図である。
【図15】基板位置決めシーケンスを示す図である。
【発明を実施するための形態】
【0029】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
【0030】
[スクリーン印刷装置100の全体構成]
図1は、本実施形態に係るスクリーン印刷装置100を示す正面図である。図2は、スクリーン印刷装置100を示す側面図である。なお、本明細書中で説明する、各図では、図面を分かりやすく表示するため、スクリーン印刷装置100や、スクリーン印刷装置100が有する各部材等の大きさを実際の寸法とは異なって表示する場合がある。
【0031】
これらの図に示すように、スクリーン印刷装置100(基板処理装置)は、スクリーン1と、スクリーン1をスクリーン印刷装置100の所定位置に固定する固定部5とを備えている。また、スクリーン印刷装置100は、スクリーン1の上方に配置され、クリーム半田が供給されたスクリーン1上をスライドされるスキージ部10を備えている。
【0032】
また、スクリーン印刷装置100は、スクリーン1の下方に配置された位置決め機構20と、撮像部85と、クリーニング部80とを備えている。位置決め機構20は、スクリーン印刷の対象となる基板9をスクリーン1に対して位置決めする。撮像部85は、基板9上に設けられたアライメントマークや、スクリーン1の下側に設けられたアライメントマーク、基板吸着ステージ上等に設けられた基準マーク8(図12参照)等を撮像する。クリーニング部80は、スクリーン1の下面をクリーニングする。
【0033】
さらに、スクリーン印刷装置100は、スクリーン印刷装置100の背面側で、スキージ部10、クリーニング部80及び撮像部85を移動可能に支持する支持ベース90を備えている。
【0034】
なお、図示は省略しているが、スクリーン印刷装置100は、スクリーン印刷装置100の各部を統括的に制御するCPU(Central Processing Unit)等の制御部を有している。また、スクリーン印刷装置100は、制御部の作業用の領域として用いられる不揮発性のメモリと、制御部の処理に必要な各種のプログラムが記憶された不揮発性のメモリとを含む記憶部を有している。上記各種のプログラムは、光ディスク、半導体メモリ等の可搬性の記録媒体から読み取られても構わない。
【0035】
スクリーン1は、基板9の配線パターンに応じたパターン孔を有している。スクリーン1は、ステンレス鋼などの金属により構成され、スクリーン1には、スクリーン1の四辺に沿って枠体2が設けられる。枠体2は、スクリーン1にたるみが生じないように、4方向から所定の張力でスクリーン1を引っ張っている。
【0036】
スクリーン1の下面には、基板9との位置合わせ用のアライメントマークが2箇所に設けられている。この2つのアライメントマークは、例えば、パターン孔が設けられた領域を挟んで対角線上の位置に配置される。これに対して、基板9上にもスクリーン1との位置合わせ用のアライメントマークが2箇所に設けられている。この2つのアライメントマークは、例えば、基板9上において、対角線上の位置に配置される。
【0037】
スクリーン1をスクリーン印刷装置100の所定の位置に固定する固定部5は、取り付けフレーム6と、取り付けフレーム6に設けられ、スクリーン1をクランプするスクリーンクランプ7とを有する。取り付けフレーム6は、支持ベース90や、図示しない支持体などにより支持されている。スクリーンクランプ7は、取り付けフレーム6に複数個設けられる。スクリーンクランプ7は、スクリーン1に設けられた枠体2を上下方向から挟み込んで固定する。
【0038】
支持ベース90の上部側には、Y軸方向に沿って一対の上部案内レール91、92が設けられる。また、支持ベース90下部側には、Y軸方向に沿って一対の下部案内レール93、94が設けられる。
【0039】
上部案内レール91、92には、スキージ部10を支持するキャリッジ95が移動可能に取り付けられている。スキージ部10及びキャリッジ95は、例えば、ボールネジ及びモータ等で構成される駆動機構の駆動により、支持ベース90に対してY軸方向に沿って移動される。
【0040】
スキージ部10は、第1のスキージ機構11と、第1のスキージ機構11と対称に配置される第2のスキージ機構12とを有する。第1のスキージ機構11及び第2のスキージ機構12は、それぞれ、スキージ13と、スキージ保持部材14と、支持部材15と、エアシリンダ16とを含む。
【0041】
スキージ13は、クリーム半田が供給されたスクリーン1上をスライドされて、スクリーン1に設けられたパターン孔を介して基板9上にクリーム半田を塗布する。スキージ保持部材14は、スキージ13を保持し、支持部材15は、スキージ保持部材14を支持する。エアシリンダ16は、支持部材15を支持し、支持部材15、スキージ保持部材14及びスキージ13を一体的に上下方向に駆動させる。
【0042】
一方のスキージ機構が下方に位置してスクリーン1上をスライドされているとき、他方のスキージ機構は、上方に位置しており、スクリーン1には当接しない状態とされる。スクリーン1上をスライドされるスキージ機構は、交互に切り替えられる。
【0043】
支持ベース90の下部側に設けられた下部案内レール93、94には、撮像部85を支持するキャリッジ97と、クリーニング部80を支持するキャリッジ96とが移動可能に取り付けられている。
【0044】
撮像部85及びキャリッジ97は、ボールネジ及びモータ等の駆動機構の駆動により支持ベース90に対してY軸方向に沿って移動される。撮像部85は、キャリッジ97に対してX軸方向に移動可能に取り付けられており、ボールネジ及びモータ等の駆動機構の駆動によりキャリッジ97に対してX軸方向に沿って移動される。これにより、撮像部85は、Y軸方向及びX軸方向に沿って移動可能とされる。
【0045】
上記した案内レール93、94、キャリッジ97、撮像部85を駆動させる駆動機構などにより、撮像部85を移動させる移動機構が構成される。
【0046】
撮像部85は、下側に向けて配置された第1の撮像部86と、上側に向けて配置された第2の撮像部87とを含む。下側に向けて配置された第1の撮像部86は、基板9上に設けられたアライメントマークと、基板吸着ステージ上等に設けられた基準マーク8(図12参照)とを撮像する。上側に向けて配置された第2の撮像部87は、スクリーン1の下面側に設けられたアライメントマークを撮像する。
【0047】
第1の撮像部86及び第2の撮像部87は、それぞれ、CCDセンサ(CCD:Charge Coupled Device)、あるいはCMOSセンサ(CMOS:Complementary Metal Oxide Semiconductor)等の撮像素子と、結像レンズ等の光学系とを含む。
【0048】
図1及び図2では、2つの撮像部86、87が設けられる場合の一例が示されているが、撮像部の数は、1つとすることも可能である。撮像部が1つである場合、撮像部は、例えば、X軸方向の軸を回転の中心軸として回転可能(回動可能)に構成されればよい。
【0049】
クリーニング部80及びキャリッジ96は、ボールネジ及びモータ等の駆動機構の駆動により支持ベース90に対してY軸方向に沿って移動される。クリーニング部80は、ローラ81と、クリーニングテープを送り出す送り出しローラ82と、クリーニングテープを巻き取る巻き取りローラ83とを有する。
【0050】
クリーニング部80がY軸方向に沿って移動されると、それに連動して、ローラ81、送り出しローラ82及び巻き取りローラ83が回転される。送り出しローラ82から送り出されたクリーニングテープは、スクリーン1の下面に当接しながらローラ81の周囲を回転し、巻き取りローラ83により巻き取られる。これにより、スクリーン1の下面がクリーニングされる。
【0051】
[位置決め機構20の構成]
図3は、位置決め機構20を示す斜視図である。図4は、図3に示すA方向から位置決め機構20を見た場合の側面図であり、図5は、図3に示すB方向から位置決め機構20を見た場合の側面図である。
【0052】
図3〜図5に示すように、位置決め機構20は、基板9を位置決めするためのテーブル機構30と、テーブル機構30上に設けられ、基板9を保持する基板保持機構50とを有する。
【0053】
図6は、テーブル機構30を示す斜視図である。図7は、図6に示すA方向からテーブル機構30を見た場合の斜視図である。
【0054】
(テーブル機構30の構成)
図6及び図7を参照して、まず、テーブル機構30の構成について説明する。
テーブル機構30は、ベース31と、ベース31上に設けられたフレーム状のX軸テーブル32Xと、X軸テーブル32X上に設けられたフレーム状のY軸テーブル32Yと、Y軸テーブル32Y上に設けられたθ軸テーブル32θとを有する。また、テーブル機構30は、X軸テーブル32Xを移動させるX軸偏心カム機構21Xと、Y軸テーブル32Yを移動させるY軸偏心カム機構21Yと、θ軸テーブル32θを回転(移動)させるθ軸偏心カム機構21θとを有する。各軸の偏心カム機構21は、同様の構成を有している。
【0055】
ベース31上には、X軸方向に沿って2本のガイドレール41が設けられている。X軸テーブル32Xは、この2本のガイドレール41上にスライド可能に取り付けられたスライド部材42上に設けられている。X軸テーブル32X上には、Y軸方向に沿って2本のガイドレール43が設けられている。Y軸テーブル32Yは、この2本のガイドレール43上にスライド可能に取り付けられたスライド部材44上に設けられている。
【0056】
Y軸テーブル32Y上において、4つの角部の近傍には、それぞれ半球状の支持体45が設けられる(図4、図5参照)。この4つの支持体45によりθ軸テーブル32θの回転が支持される。
【0057】
θ軸テーブル32θには、複数の穴46が形成されている。この複数の穴46は、基板保持機構50を昇降させる昇降機構を取り付けたりするために用いられたり、吸引用チューブ68を通すために用いられたりする。
【0058】
図8は、偏心カム機構21を示す斜視図である。図8に示すように偏心カム機構21は、偏心カム機構本体22と、カム受けブロック23とを有する。偏心カム機構本体22は、基部24と、基部24に回転可能に軸支される軸体25と、軸体25の一端部側に固定され、回転によりテーブル32を移動させる偏心カム26と、基部24に取り付けられたカム駆動用モータ27とを有する。また、偏心カム機構本体22は、カム駆動用モータ27の出力軸及び軸体25の他端部側の間に掛け渡されたタイミングベルト28と、タイミングベルト28のテンション調整用の回転体29とを有する。
【0059】
偏心カム26は、鉄、コバルト、ニッケル等の磁性体で構成される。この偏心カム26は、カム曲線等が考慮された複雑な形状とはされておらず、単純な円柱形状とされる。
【0060】
カム受けブロック23は、内部にマグネットを有している。なお、カム受けブロック23の全体がマグネットで構成されていても構わない。
【0061】
このように、偏心カム26が磁性体で構成され、カム受けブロック23がマグネットで構成されているため、偏心カム26と、カム受けブロック23とが磁力により引き合う。従って、偏心カム26の回転により一方向に移動させたテーブル32を、逆方向に戻すことができる。
【0062】
偏心カム26の回転によりテーブル32を移動させる場合、一端、偏心カム26により送り出されたテーブル32を逆方向に戻すための戻り機構が必要となる。この戻り機構として、本実施形態では、磁性体と、マグネットとが引き合う力が利用されている。
【0063】
再び図6及び図7を参照して、X軸の偏心カム機構本体22Xは、ベース31上において、ベース31の縁部の近傍に取り付けられる。一方、X軸のカム受けブロック23Xは、X軸テーブル32Xの側面に取り付けられる。カム駆動用モータ27Xの駆動によりX軸偏心カム26Xが回転すると、X軸のカム受けブロック23XがX軸偏心カム26Xの回転に追従して移動し、X軸テーブル32XがX軸方向に移動する。X軸テーブル32XがX軸方向に移動した場合、X軸テーブル32X上に設けられたY軸テーブル32Yと、θ軸テーブル32θと、基板保持機構50とが一体的にX軸方向に移動する。
【0064】
Y軸の偏心カム機構本体22Yは、Y軸テーブル32Yの側面に、上下逆に取り付けられている。一方、Y軸のカム受けブロック23Yは、X軸テーブル32Xの側面に取り付けられる。カム駆動用モータ27Yの駆動によりY軸偏心カム26Yが回転すると、Y軸の偏心カム機構本体22Yが取り付けられた側のY軸テーブル32YがY軸偏心カム26Yの回転に応じてY軸方向に移動する。Y軸テーブル32YがY軸方向に移動した場合、Y軸テーブル32Y上に設けられたθ軸テーブル32θと、基板保持機構50とが一体的にY軸方向に移動する。
【0065】
θ軸の偏心カム機構本体22θは、Y軸テーブル32Yの側面に取り付けられる。つまり、Y軸偏心カム機構21Yの偏心カム機構本体22Yと、θ軸偏心カム機構21θの偏心カム機構本体22θとは、同じテーブル32(Y軸テーブル32Y)に取り付けられる。一方、θ軸のカム受けブロック23θは、θ軸テーブル32θに取り付けられる。カム駆動用モータ27θの駆動によりθ軸偏心カム26θが回転すると、θ軸のカム受けブロック23θがθ軸偏心カム26θの回転に追従して移動し、θ軸テーブル32θがZ軸回りに回転する。θ軸テーブル32θがZ軸回りに回転した場合、θ軸テーブル32θ上に設けられた基板保持機構50が、θ軸テーブル32θと一体的に回転する。
【0066】
本実施形態に係るスクリーン印刷装置100では、テーブル32を駆動させる機構として偏心カム26を有する偏心カム機構21が用いられている。従って、ボールネジ等を用いたテーブル32駆動機構に比べて、コストを削減することができる。
【0067】
さらに本実施形態では、一端、偏心カム26により送り出されたテーブル32を逆方向に戻すための戻り機構として、マグネットが用いられた方式が採用されているので、コスト削減及びコンパクト化の観点から有利である。一方、戻り機構としては、マグネットが用いられる方式の代わりに、例えば、バネや、エアシリンダ等を用いた方式が採用されてもよい。
【0068】
例えば、X軸テーブル32Xで説明すると、X軸の偏心カム機構本体22Xが設けられた側に向けてX軸テーブル32Xを引き寄せるバネ部材がX軸偏心カム機構21Xに設けられる。あるいは、X軸の偏心カム機構本体22Xが設けられた側に向けてX軸テーブル32Xを押し付けるエアシリンダ(あるいは、バネ部材)が、X軸テーブル32Xを挟んでX軸の偏心カム機構本体22Xとは反対側の位置に設けられる。なお、コスト削減及びコンパクト化の観点からは、上記したマグネットを用いた方式が特に有効である。
【0069】
また、本実施形態のように、偏心カム機構21が用いられる形態の場合、偏心カム機構21をテーブル32の外側に配置することができるので、メンテナンスが容易となる。また、偏心カム機構21が用いられる形態の場合、各軸の偏心カム機構21の部品の共通化も容易である。
【0070】
また、偏心カム26は、回転範囲がカムストローク中心から最大でも±90°程度とされるので、低回転数で動作可能である。従って、カム駆動用モータ27の選定範囲が広く、安価なカム駆動用モータ27も使用可能である。
【0071】
さらに、本実施形態のように、偏心カム機構21が用いられる形態の場合、テーブル32は、偏心カム26の回転範囲で移動するため、可動範囲が小さい。従って、カム駆動用モータ27が暴走した際にテーブル32の動作を規制するための規制機構や、テーブル32の過剰動作を検出するセンサ等も不要である。このような観点からも、本実施形態では、コスト削減が可能であることが分かる。
【0072】
図6及び図7等に示す一例では、Y軸偏心カム機構21Yについて、偏心カム機構本体22Yが上下逆にY軸テーブル32Yに取り付けられ、カム受けブロック23がX軸テーブル32Xに取り付けられているが、これは、逆であってもよい。つまり、偏心カム機構本体22Yが(上下逆でなく)X軸テーブル32Xに取り付けられ、カム受けブロック23YがY軸テーブル32Yに取り付けられてもよい。
【0073】
しかしながら、この場合、Y軸の偏心カム機構本体22Yと、θ軸の偏心カム機構本体22θとがそれぞれ別のテーブル32に取り付けられることになる。この場合、Y軸の偏心カム機構本体22Yと、θ軸の偏心カム機構本体22θとがそれぞれ別々の動きをしてしまう。この場合、Y軸のカム駆動用モータ27Yに接続される電力供給用のケーブルと、θ軸のカム駆動用モータ27θに接続される電力供給用のケーブルとが別々の動きをしてしまうため、これらのケーブルの扱いが複雑になってしまう恐れがある。
【0074】
一方、Y軸の偏心カム機構本体22Yが上下逆にY軸テーブル32Yに取り付けられ、カム受けブロック23YがX軸テーブル32Xに取り付けられ場合、Y軸の偏心カム機構本体22Yと、θ軸の偏心カム機構本体22θとが同じテーブル32(Y軸テーブル32Y)に取り付けられることになる。この場合、Y軸のカム駆動用モータ27Yに接続される電力供給用のケーブルと、θ軸のカム駆動用モータ27θに接続された電力供給用のケーブルとが同じような動きをする。従って、これらのケーブルの扱いが複雑となってしまうことを防止することができる。
【0075】
図7を参照して(図5も参照)、テーブル機構30は、X軸偏心カム機構21X、Y軸偏心カム機構21Y、θ軸偏心カム機構21θそれぞれについての偏心カム26の仮のカムストローク中心(大まかなカムストローク中心)を検出するためのセンサ部35を有している。
【0076】
X軸偏心カム26Xの仮のカムストローク中心を検出するセンサ部35Xは、ベース31に取り付けられた光センサ36Xと、X軸テーブル32Xに取り付けられたセンサ検出用の板材37Xとを有する。Y軸偏心カム26Yの仮のカムストローク中心を検出するセンサ部35Yは、Y軸テーブル32Yに取り付けられた光センサ36Yと、X軸テーブル32Xに取り付けられたセンサ検出用の板材37Yとを有する。θ軸偏心カム26θの仮のカムストローク中心を検出するセンサ部35θは、Y軸テーブル32Yに取り付けられた光センサ36θと、θ軸テーブル32θに取り付けられた板材37θとを有する。
【0077】
光センサ36が取り付けられる位置と、板材37が取り付けられる位置とは、逆であってもよい。例えば、X軸について説明すると、X軸テーブル32Xに光センサ36Xが取り付けられ、ベース31に板材37Xが取り付けられても構わない。
【0078】
図9は、偏心カム26の動きと、センサ部35との関係を示す模式図である。図9(A)に示すように、偏心カム26の回転によりテーブル32が移動すると、テーブル32に取り付けられた板材37が移動する。そして、偏心カム26が図9(B)に示す位置まで回転すると、光センサ36による受光状態と、非受光状態とが切り替えられる。これにより、偏心カム26の仮のカムストローク中心が検出される。図9(B)に示す偏心カム26の位置が、偏心カム26の仮のカムストローク中心である。
【0079】
(基板保持機構50の構成)
次に、図3〜図5を参照して、基板保持機構50の構成について説明する。これらの図に示すように、基板保持機構50は、θ軸テーブル32θ上に配置されたベース51と、ベース51上に配置された2つのベルト保持部材60と、ベース51上に配置されたステージ支持部材65とを有する。2つのベルト保持部材60は、Y軸方向に沿って配置され、基板9を搬送するコンベアベルト61を保持する。ステージ支持部材65は、基板9を吸着保持する基板吸着ステージ(図示せず)を下方から支持する。
【0080】
θ軸テーブル32θ上には、4本のz軸ガイド71が固定され、ベース51は、この4本のz軸ガイド71上に配置される。なお、ベース51は、z軸ガイド71には、固定されていない。ベース51には、ベース51の下側に向けて伸びる、z軸ガイド71にガイドされる4本のシャフト72が固定されている。
【0081】
θ軸テーブル32θの中央の位置には、ロータリーボールネジ73が設けられている。ロータリーボールネジ73は、θ軸テーブル32θの中央の上部に、Z軸回りに回転可能に設けられたボールネジナット74と、ボールネジナット74の回転に応じて上下方向に移動するボールネジ75とを含む。ボールネジ75の上側の端部は、ベース51の下面と当接している。
【0082】
θ軸テーブル32θの下側には、ロータリーボールネジ73の駆動源としてのモータ76が取り付けられている。このモータ76の出力軸は、θ軸テーブル32θの上側の位置に配置され、この出力軸と、ボールネジナット74との間には、ベルト77が掛けられている。これにより、モータ76が駆動されると、ベルト77によりモータ76の駆動がボールネジナット74に伝達されてボールネジナット74が回転し、ボールネジナット74の回転に応じて、ボールネジ75が上下方向に移動する。ボールネジ75が上下方向に移動すると、ベース51の下側に設けられた4本のシャフト72が、θ軸テーブル32θの上側に設けられた4本のz軸ガイド71に案内されつつ、ベース51がθ軸テーブル32θに対して上下方向に移動する。これにより、テーブル機構30に対して、基板保持機構50が上下方向にする。
【0083】
ベース51上には、2本のガイドレール52がX軸方向に沿って配置されている。この2本のガイドレール上には、それぞれ、ガイドレール52上をスライドする2つのスライド部材53が設けられている。ベルト保持部材60は、一方のガイドレール52上をスライド可能なスライド部材53と、他方のガイドレール52上をスライド可能なスライド部材53との上方に取り付けられている。これにより、2つのベルト保持部材60は、それぞれX軸方向に沿って移動可能とされる。
【0084】
ベース51上において、2つのベルト保持部材60のX軸方向の外側の位置には、2つのベルト保持部材60の間の、X軸方向での幅を調整する幅調整機構55が設けられている。ベース51の下側には、幅調整機構55の駆動源としての幅調整用モータ56が取り付けられている。ベース51上には、ベース51の縁部に沿うようにして、複数のプーリ57と、複数のベルト58が設けられている。この複数のプーリ57と、複数のベルト58とによって、幅調整用モータ56の駆動が幅調整機構55に伝達される。幅調整機構55により、基板9の幅に応じて、2つのベルト保持部材60の間の距離を調整することができる。
【0085】
ベルト保持部材60の内面側には、複数のプーリ62が回転可能に設けられている。この複数のプーリ62に対して、Y軸方向に長い形状のコンベアベルト61が掛けられている。ベルト保持部材60の外面側には、コンベア駆動用モータ63が取り付けられており、コンベア駆動用モータ63の出力軸がコンベアベルト61に掛けられている。このコンベア駆動用モータ63の駆動により、コンベアベルト61が回転され、コンベアベルト61上の基板9が搬送される。
【0086】
ベース51上には、4本の円柱状の支持体66が設けられており、この4本の支持体66上に、基板9を吸着保持する基板吸着ステージ(図示せず)を下方から支持するステージ支持部材65が設けられている。この4本の支持体66は、ベース51に対するステージ支持部材65の高さを調整可能なように構成されている。ステージ支持部材65の中央近傍には、上下方向に貫通する穴67が設けられており、この穴には、吸引用チューブ68が接続される。吸引用チューブ68は、図示しないエアコンプレッサ等に接続されている。エアコンプレッサの駆動により、基板9が基板吸着ステージによって吸着保持されて、基板9の位置ずれが防止される。
【0087】
基板吸着ステージ上、ステージ支持部材65上、基板保持機構50のベース51上、あるいは、ベルト保持部材60上には、後述の校正シーケンス時に、撮像部85により撮像される基準マーク8(図12参照)が設けられる。この基準マーク8は、上記した部材上に特別に設けられてもよいし、上記部材上に既にある穴等の形状が基準マーク8として用いられてもよい。基準マーク8が設けられる位置は、典型的には、テーブル機構30の駆動とともに移動する部材上に設けられており、かつ、撮像部85が撮像可能な位置に設けられていれば、どのような位置に設けられていても構わない。
【0088】
[動作説明]
次に、本実施形態に係るスクリーン印刷装置100の処理について説明する。
【0089】
(校正シーケンス)
まず、偏心カム26の個体差によるバラつきなどに起因する、制御部によるテーブル32の移動の指令値と、実際のテーブル32の移動値との差を画像処理によって確認する校正シーケンスの際の処理について説明する。この校正シーケンスは、例えば、スクリーン印刷装置100の出荷時や、スクリーン印刷装置100のメンテナンス時に実行される。
【0090】
図10及び図11は、校正シーケンス時のスクリーン印刷装置100の処理を示す図である。まず、制御部は、各軸偏心カム機構21の偏心カム26を仮のカムストローク中心(大まかなカムストローク中心)に位置させる(ステップ101)(図9参照)。
【0091】
この場合、まず、制御部は、各軸偏心カム機構21のカム駆動用モータ27を駆動させて、各軸の偏心カム26を回転させる。偏心カム26が回転されると、偏心カム26の回転に追従してカム受けブロック23が移動し(Y軸偏心カム機構21Yでは、Y軸の偏心カム26Y側が移動)、各軸のテーブル32が移動される。各軸のテーブル32が移動されると、センサ部35の光センサ36と、センサ検出用の板材37との相対位置が変化して、特定の位置で、光センサ36による受光状態と、非受光状態とが切り替えられる。
【0092】
制御部は、光センサ36による受光状態と、非受光状態とが切り替えられる位置で、カム駆動用モータ27の駆動を停止する。これにより、各軸の偏心カム機構21の偏心カム26が仮のカムストローク中心に位置する。そして、各軸のテーブル32が仮の原点位置に移動する。
【0093】
このような処理により、制御部が実際のカムストローク中心を未だ認識していない状態(例えば、電源投入時)でも、制御部は、偏心カム26のおおよそのカムストローク中心を認識することができる。
【0094】
次に、制御部は、撮像部85の移動機構により、第1の撮像部86(下向のカメラ)の撮像視野の中心に基準マーク8が位置するように第1の撮像部86を移動させる(ステップ102)。この場合、制御部は、第1の撮像部86によって取得された基準マーク8を含む画像の情報に基づいて、撮像視野の中心に基準マーク8が位置するように撮像部85を移動させる。図12には、基準マーク8が撮像視野の中心に位置したときの様子が示されている。
【0095】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、X軸偏心カム26Xの実際のカムストローク中心を測定する(ステップ103)。この場合、まず、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、仮のカムストローク中心に位置する状態のX軸偏心カム26Xを回転させ、X軸テーブル32Xを移動させる。このX軸テーブル32Xの移動に応じて基準マーク8が第1の撮像部86の撮像視野内で移動する。制御部は、撮像視野内で移動する基準マーク8の画像に基づいて、X軸偏心カム26Xの実際のカムストローク中心を測定する。
【0096】
図13は、実際に測定された、偏心カム26の回転に対するテーブル32の移動量(基準マーク8の移動量)の軌跡と、後述の中心位置補正後の、偏心カム26の回転に対するテーブル32の移動量(基準マーク8の移動量)の軌跡との関係を示す図である。
【0097】
図13中、破線で示すように、テーブル32の移動量(基準マーク8の移動量)は、偏心カム26の回転に対して正弦波状の軌跡を描く。正弦波状の軌跡の原点位置が実際のカムストローク中心である。制御部は、この実際のカムストローク中心の位置を、第1の撮像部86によって撮像された画像に基づいて測定する。
【0098】
上記したように、本実施形態では、基準マーク8を第1の撮像部86の撮像視野の中心に位置させた後に、偏心カム26を回転させて、基準マーク8を撮像視野内で移動させているので、撮像部85のレンズの歪みの影響を排除することができる。従って、偏心カム26の回転に対するテーブル32の移動量の軌跡を正確に測定することができ、これにより、実際のカムストローク中心を正確に測定することができる。
【0099】
次に、制御部は、測定された実際のカムストローク中心がソフトウェア上のゼロ位置となるように、設定を行なう(ステップ104)。図13には、この設定が実行されたされたときの様子が示されている。
【0100】
次に、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、X軸偏心カム26Xが実際のカムストローク中心(ゼロ位置)に位置するようにX軸偏心カム26Xを回転させる(ステップ105)。
【0101】
次に、制御部は、X軸偏心カム26Xが実際のカムストローク中心に位置する状態で、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように、第1の撮像部86を移動させる(ステップ106)。
【0102】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する(ステップ107)。この場合、まず、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、実際のカムストローク中心に位置する状態のX軸偏心カム26Xを回転させ、X軸テーブル32Xを移動させる。このX軸テーブル32Xの移動に応じて基準マーク8が第1の撮像部86の撮像視野内で移動する。制御部は、撮像視野内で移動する基準マーク8の画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する。
【0103】
このように、本実施形態では、偏心カム26が実際のストローク中心に位置する状態から偏心カム26が回転され、偏心カム26の移動に応じて撮像視野内で移動する基準マーク8の画像に基づいて、偏心カム26の回転に対するテーブル32の移動量が測定される。これにより、偏心カム26の回転に対するテーブル32の移動量を正確に測定することができる。
【0104】
さらに、基準マーク8を第1の撮像部86の撮像視野の中心に位置させた後に、偏心カム26を回転させて、基準マーク8を撮像視野内で移動させているので、撮像部85のレンズの歪みの影響を排除することができる。従って、偏心カム26の回転に対するテーブル32の移動量を、さらに正確に測定することができる。後述のY軸及びθ軸についても同様の効果を得ることができる。
【0105】
次に、制御部は、X軸偏心カム26Xを実際のカムストローク中心から所定の回転量分、回転させて、基準マーク8を特定の位置に移動させる(ステップ108)。そして、制御部は、撮像部85の移動機構により、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように第1の撮像部86を移動させる(ステップ109)。これにより、撮像部85のレンズの歪みの影響を排除することができる。
【0106】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する(ステップ110)。ステップ110では、まず、制御部は、X軸偏心カム機構21Xのカム駆動用モータ27Xを駆動させて、X軸偏心カム26Xを回転させ、X軸テーブル32Xを移動させる。制御部は、X軸テーブル32Xの移動に応じて第1の撮像部86の撮像視野内で移動する基準マーク8の画像に基づいて、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量を測定する。
【0107】
制御部は、ステップ108〜110の処理を異なる5つのポイントで実行する(ステップ111)。
【0108】
次に、制御部は、測定によって得られた、X軸偏心カム26Xの回転に対するX軸テーブル32Xの移動量と、制御部が有している、X軸テーブル32Xを移動させるための指令値とのずれ量とを算出する。そして、制御部は、算出されたずれ量に基づいて、X軸テーブル32Xの移動に用いられる移動式を補正する(ステップ112)。
【0109】
次に、制御部は、ステップ102〜ステップ112の処理をY軸偏心カム機構21Y、Y軸テーブル32Yで実行する(ステップ113)。
【0110】
次に、制御部は、X軸及びY軸で補正された移動式に基づいて、直交度補正量を計算し、この直交度補正量に基づいて、X軸テーブル32X及びY軸テーブル32Yを移動させるための移動式を修正する(ステップ114)。これにより、X軸テーブル32Xの移動に用いられる移動式と、Y軸テーブル32Yの移動に用いられる移動式とを正確に補正することができる。
【0111】
次に、制御部は、X軸及びY軸のカム駆動用モータ27X、27Yを駆動させ、X軸偏心カム26X及びY軸偏心カム26Yを実際のカムストローク中心(ゼロ位置)に移動させる(ステップ115)。そして、制御部は、X軸偏心カム26X及びY軸偏心カム26Yが実際のカムストローク中心に位置する状態で、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように、第1の撮像部86を移動させる(ステップ116)。
【0112】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する(ステップ117)。ステップ117では、まず、制御部は、θ軸のカム駆動用モータ27θを駆動させて、θ軸偏心カム26θを回転させ、θ軸テーブル32θを回転させる。制御部は、θ軸テーブル32θの回転に応じて第1の撮像部86の撮像視野内で移動する基準マーク8の画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する。
【0113】
次に、制御部は、θ軸偏心カム26θを所定の回転量分、回転させて、基準マーク8を特定の位置に移動させる(ステップ118)。そして、制御部は、第1の撮像部86の撮像視野の中心に基準マーク8が位置するように第1の撮像部86を移動させる(ステップ119)。
【0114】
次に、制御部は、第1の撮像部86から取得される基準マーク8を含む画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する(ステップ120)。この場合、制御部は、θ軸偏心カム機構21θのカム駆動用モータ27を駆動させて、θ軸偏心カム26θを回転させ、θ軸テーブル32θを回転させる。制御部は、θ軸テーブル32θの回転に応じて第1の撮像部86の撮像視野内で移動する基準マーク8の画像に基づいて、θ軸偏心カム26θの回転に対するθ軸テーブル32θの回転量を測定する。
【0115】
制御部は、ステップ118〜ステップ120の処理を異なる5つのポイントで実行する(ステップ121)。
【0116】
次に、制御部は、測定によって得られた、θ軸偏心カム26θの回転に対するθ軸テーブル32θの移動量と、制御部が有している、θ軸テーブル32θを移動させるための指令値とのずれ量とを算出する。そして、制御部は、算出されたずれ量に基づいて、θ軸テーブル32θの移動に用いられる移動式を補正する(ステップ122)。このとき、制御部は、指令値に対する、θ軸テーブル32θのX軸方向及びY軸方向でのずれ量にも基づいて、θ軸テーブル32θの移動に用いられる移動式を補正する。
【0117】
次に、制御部は、再度、ステップ115〜ステップ121を実行する(ステップ123)。このとき、制御部は、θ軸偏心カム26θの回転時には、既に補正された移動式(X軸方向及びY軸方向の補正あり)で、θ軸偏心カム26θを回転させる。
次に、制御部は、制御部は、指令値に対する、θ軸テーブル32θの回転量と、X軸方向及びY軸方向でのずれ量とに基づいて、再度、θ軸テーブル32θの移動に用いられる移動式を補正する。これにより、θ軸テーブル32θの移動に用いられる移動式を正確に補正することができる。
【0118】
ここで、図13を参照して、偏心カム26の回転範囲について説明する。偏心カム26の回転範囲としては、カムストローク中心から±90°の範囲で使用可能である。この範囲のうち、本実施形態では、カムストローク中心から±60°の範囲を使用することとしている。これにより、偏心カム26の圧力角を小さくすることができる。
【0119】
ここで、本実施形態では、上記したように、偏心カム26の回転に応じて移動する基準マーク8を撮像部85により撮像することで、偏心カム26の回転に対するテーブル32の移動量が測定されるので、偏心カム26の形状が複雑な形状である必要がない。すなわち、偏心カム26が略円柱形状のような単純な形状(カム曲線等が考慮されていない単純な形状)であっても、正確に偏心カム26の回転に対するテーブル32の移動量を測定することができる。そして、偏心カム26が略円柱形状とされることでコストをさらに削減することができる。
【0120】
(基準位置登録シーケンス及び基板位置決めシーケンス)
次に、基準位置登録シーケンス及び基板位置決めシーケンスについて説明する。基板位置決めシーケンスは、通常生産で実行される処理であり、スクリーン1の位置に対して基板9の位置を合わせる処理である。
【0121】
基板位置決めシーケンスの前に、スクリーン1の位置に対して、基板9の基準位置が登録される(基準位置登録シーケンス)。基板位置決めシーケンスでは、基準位置登録シーケンスで登録されたスクリーン1に対する基板9の位置に対して、そのとき処理される基板9の位置がX軸、Y軸、θ軸方向でどの程度ずれているのかが判定される。そして、判定されたずれ量に基づいて、テーブル機構30によりX軸、Y軸、θ軸方向でずれ量が修正され、スクリーン1に対して基板9が正確な位置に移動される。
【0122】
(基準位置登録シーケンス)
まず、スクリーン1の位置に対して、基板9の基準位置が登録されるときの処理(基準位置登録シーケンス)について説明する。図14は、基準位置登録シーケンスを示す図である。
【0123】
まず、作業者によりスクリーン1がスクリーン印刷装置100に設置される(ステップ201)。この場合、作業者は、スクリーン1の四辺に設けられた、スクリーン1を四方向から引っ張る枠体2を、スクリーンクランプ7により上下方向から挟み込こむことで、スクリーン1をスクリーン印刷装置100に設置する。
【0124】
制御部は、撮像部85の移動機構を制御して、予め設定されたマーク位置(1)に撮像部85を移動させる(ステップ202)。そして、制御部は、第2の撮像部87(上向きのカメラ)によって、スクリーン1の下面に設けられた2つのアライメントマークのうちの一方のアライメントマークを撮像する。制御部は、撮像された画像を基準位置として登録する(ステップ203)。
【0125】
次に、制御部は、撮像部85の移動機構を制御して、予め設定されたマーク位置(2)に撮像部85を移動させる(ステップ204)。そして、制御部は、第2の撮像部87により、スクリーン1の下面に設けられた2つのアライメントマークのうちの他方のアライメントマークを撮像する。そして、制御部は、撮像された画像を基準位置として登録する(ステップ205)。
【0126】
制御部は、マーク位置(1)及びマーク位置(2)で撮像された、アライメントマークの画像に基づいて、スクリーン1の位置を認識する(ステップ206)。
【0127】
次に、印刷される基板9が投入される(ステップ207)。このとき、制御部は、コンベア駆動用モータ63の駆動によりコンベアベルト61を回転させて、コンベアベルト61上で基板9を搬送し、基板9をコンベアベルト61上の所定の位置に移動させる。そして、基板吸着ステージによって、基板9を吸着保持する。
【0128】
次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(1)に撮像部85を移動させる(ステップ208)。そして、制御部は、第1の撮像部86(下向のカメラ)により、基板9上に設けられた2つのアライメントマークのうちの一方のアライメントマークを撮像する。制御部は、撮像された画像を基準位置として登録する(ステップ209)。
【0129】
次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(2)に撮像部85を移動させる(ステップ210)。そして、制御部は、第1の撮像部86により、基板9上に設けられた2つのアライメントマークのうちの他方のアライメントマークを撮像する。制御部は、撮像された画像を基準位置として登録する(ステップ211)。
【0130】
(基板位置決めシーケンス)
次に、スクリーン1の位置に対して基板9の位置を合わせる基板位置決めシーケンスについて説明する。図15は、基板位置決めシーケンスを示す図である。
【0131】
まず、印刷される基板9が投入される(ステップ301)。次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(1)に撮像部85を移動させる(ステップ302)。そして、制御部は、第1の撮像部86により、基板9上に設けられた2つのアライメントマークのうちの一方のアライメントマークを撮像する。
【0132】
次に、制御部は、基準位置として登録された画像内のアライメントマークの位置と、撮像された画像内のアライメントマークとのずれ量を測定する(ステップ303)。
【0133】
次に、制御部は、スクリーン1の位置補正を考慮し、設定されたマーク位置(2)に撮像部85を移動させる(ステップ304)。そして、制御部は、第1の撮像部86により、基板9上に設けられた2つのアライメントマークのうちの他方のアライメントマークを撮像する。
【0134】
次に、制御部は、基準位置として登録された画像内のアライメントマークの位置と、撮像された画像内のアライメントマークとのずれ量を測定する(ステップ305)。
【0135】
次に、制御部は、マーク位置(1)及びマーク位置(2)で測定されたアライメントマークのずれ量に基づいて、基板9が、X軸、Y軸、θ軸方向で正規の位置からどの程度ずれているのかを判定する(ステップ306)。
【0136】
次に、制御部は、判定されたずれ量に基づいて、各軸の偏心カム機構21を駆動させ、各軸のテーブル32を移動させることで、基板9のずれを修正する。本実施形態では、上記したように、偏心カム26の回転に対するテーブル32の移動量が正確とされているので、正確に基板9のずれを修正することができる。
【0137】
ここで、スクリーン印刷装置100等の基板処理装置は、一般的に基板9上に設けられたアライメントマークを撮像するための撮像部85を有している。そして、本実施形態では、基板9上のアライメントマークを撮像するための撮像部85(第1の撮像部86)を、基準マーク8を撮像するための撮像部85として用いている。従って、既存の撮像部85(アライメントマーク撮像用の撮像部85)を基準マーク撮像用の撮像部85として用いることができるので、基準マーク撮像用の撮像部85を特別に基板処理装置に設ける必要がない。従って、コストをさらに削減することができる。
【0138】
[各種変形例]
上記した例では、テーブル機構30が用いられる基板処理装置の一例として、スクリーン印刷装置100を例に挙げて説明した。しかしながら、基板処理装置は、これに限られない。典型的には、基板9位置決めのためのテーブル機構30が用いられる基板処理装置であれば、本技術は、どのような基板処理装置であっても適用可能である。
【0139】
本実施形態の説明では、X軸テーブル32X、Y軸テーブル32Y及びθ軸テーブル32θの全てが偏心カム機構21の駆動により駆動されるとして説明した。しかしながら、3つのテーブル32のうち、1つ、あるいは、2つのテーブル32が偏心カム機構の駆動により駆動され、他のテーブル32が例えば、ボールネジ機構などによって駆動されても構わない。
【0140】
本技術は、以下の構成をとることもできる。
(1) 基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備する基板処理装置。
(2)上記(1)に記載の基板処理装置であって、
前記偏心カムの仮のカムストローク中心を検出するセンサをさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
(3)上記(2)に記載の基板処理装置であって、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量を測定する
基板処理装置。
(4)上記(2)に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
(5)上記(3)に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの回転に対する前記テーブルの移動量を測定する
基板処理装置。
(6)上記(1)乃至(5)のうち、何れか1つに記載の基板処理装置であって、
前記偏心カム機構は、磁性体でなる前記偏心カムと、マグネットを含むカム受けブロックとを有する
基板処理装置。
(7)上記(1)乃至(6)のうち、何れか1つに記載の基板処理装置であって、
請求項1に記載の基板処理装置であって、
前記基板は、アライメントマークを有し、
前記基板処理装置は、前記基板上のアライメントマークを撮像するための撮像部を具備し、
前記アライメントマークを撮像するための撮像部が、前記基準マークを撮像するための撮像部として用いられる
基板処理装置。
(8)上記(1)乃至(7)のうち、何れか1つに記載の基板処理装置であって、
前記偏心カムは、略円柱形状である
基板処理装置。
(9) 基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備するテーブル機構。
(10) 基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させ、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定し、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする
位置決め方法。
(11)基板処理装置に、
基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させるステップと、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定するステップと、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めするステップと
を実行させるプログラム。
【符号の説明】
【0141】
1…スクリーン
8…基準マーク
9…基板
10…スキージ部
20…位置決め機構
21…偏心カム機構
22…偏心カム機構本体
23…カム受けブロック
26…偏心カム
27…カム駆動用モータ
30…テーブル機構
31…ベース
32X…X軸テーブル
32Y…Y軸テーブル
32θ…θ軸テーブル
35…センサ部
50…基板保持機構
80…クリーニング部
85…撮像部
86…第1の撮像部
87…第2の撮像部
90…支持ベース
100…スクリーン印刷装置
【特許請求の範囲】
【請求項1】
基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備する基板処理装置。
【請求項2】
請求項1に記載の基板処理装置であって、
前記偏心カムの仮のカムストローク中心を検出するセンサをさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
【請求項3】
請求項2に記載の基板処理装置であって、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量を測定する
基板処理装置。
【請求項4】
請求項2に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
【請求項5】
請求項3に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの回転に対する前記テーブルの移動量を測定する
基板処理装置。
【請求項6】
請求項1に記載の基板処理装置であって、
前記偏心カム機構は、磁性体でなる前記偏心カムと、マグネットを含むカム受けブロックとを有する
基板処理装置。
【請求項7】
請求項1に記載の基板処理装置であって、
前記基板は、アライメントマークを有し、
前記基板処理装置は、前記基板上のアライメントマークを撮像するための撮像部を具備し、
前記アライメントマークを撮像するための撮像部が、前記基準マークを撮像するための撮像部として用いられる
基板処理装置。
【請求項8】
請求項1に記載の基板処理装置であって、
前記偏心カムは、略円柱形状である
基板処理装置。
【請求項9】
基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備するテーブル機構。
【請求項10】
基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させ、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定し、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする
位置決め方法。
【請求項11】
基板処理装置に、
基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させるステップと、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定するステップと、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めするステップと
を実行させるプログラム。
【請求項1】
基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備する基板処理装置。
【請求項2】
請求項1に記載の基板処理装置であって、
前記偏心カムの仮のカムストローク中心を検出するセンサをさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
【請求項3】
請求項2に記載の基板処理装置であって、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態から前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像することで、偏心カムの回転に対するテーブルの移動量を測定する
基板処理装置。
【請求項4】
請求項2に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが仮のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの実際のカムストローク中心を測定する
基板処理装置。
【請求項5】
請求項3に記載の基板処理装置であって、
前記撮像部を移動させる移動機構をさらに具備し、
前記制御部は、前記偏心カムが実際のカムストローク中心に位置する状態で、前記移動機構により前記撮像部の撮像視野の中心に基準マークが位置するように前記撮像部を移動させ、前記撮像部が移動された後、前記偏心カムを回転させ、前記偏心カムの回転に応じて移動する基準マークを前記撮像部により撮像して、前記偏心カムの回転に対する前記テーブルの移動量を測定する
基板処理装置。
【請求項6】
請求項1に記載の基板処理装置であって、
前記偏心カム機構は、磁性体でなる前記偏心カムと、マグネットを含むカム受けブロックとを有する
基板処理装置。
【請求項7】
請求項1に記載の基板処理装置であって、
前記基板は、アライメントマークを有し、
前記基板処理装置は、前記基板上のアライメントマークを撮像するための撮像部を具備し、
前記アライメントマークを撮像するための撮像部が、前記基準マークを撮像するための撮像部として用いられる
基板処理装置。
【請求項8】
請求項1に記載の基板処理装置であって、
前記偏心カムは、略円柱形状である
基板処理装置。
【請求項9】
基板を位置決めするためのテーブルと、
回転により前記テーブルを移動させる偏心カムを有する偏心カム機構と、
前記テーブルの移動に応じて移動する基準マークと、
前記基準マークを撮像するための撮像部と、
前記偏心カムを回転させて前記テーブルを移動させ、前記テーブルの移動に応じて移動する前記基準マークを前記撮像部により撮像することで、前記偏心カムの回転に対するテーブルの移動量を測定し、前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする制御部と
を具備するテーブル機構。
【請求項10】
基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させ、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定し、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めする
位置決め方法。
【請求項11】
基板処理装置に、
基板を位置決めするためのテーブルを回転により移動させる偏心カムを回転させて前記テーブルを移動させるステップと、
前記テーブルの移動に応じて移動する基準マークを撮像部により撮像させて、前記偏心カムの回転に対するテーブルの移動量を測定するステップと、
前記基板の位置決め時に、前記測定された移動量に応じて偏心カムを回転させて前記基板を位置決めするステップと
を実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−95051(P2013−95051A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239658(P2011−239658)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]