
基板処理装置および基板処理方法
【課題】あるユニットに障害が発生したときでも、基板搬送を継続可能とする。
【解決手段】基板処理装置は、処理ユニット1〜3と、処理ユニット1〜3との間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンド11,12を有する搬送ロボット6と、処理ユニット1〜3に発生した障害を検知するセンサ類1S,2S,3Sと、センサ類1S,2S,3Sによって障害発生が検知されている処理ユニットに基板を渡さないように搬送ロボット6を制御する制御装置7とを含む。制御装置7は、一つの処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該処理ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該処理ユニットへの基板の搬入を停止し、残りのハンドで他の処理ユニットとの間で基板を受け渡しするように搬送ロボット6を制御する。
【解決手段】基板処理装置は、処理ユニット1〜3と、処理ユニット1〜3との間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンド11,12を有する搬送ロボット6と、処理ユニット1〜3に発生した障害を検知するセンサ類1S,2S,3Sと、センサ類1S,2S,3Sによって障害発生が検知されている処理ユニットに基板を渡さないように搬送ロボット6を制御する制御装置7とを含む。制御装置7は、一つの処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該処理ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該処理ユニットへの基板の搬入を停止し、残りのハンドで他の処理ユニットとの間で基板を受け渡しするように搬送ロボット6を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、基板を保持することができる複数のユニットと、この複数のユニットとの間で基板を受け渡しすることができる搬送ロボットとを備えた基板処理装置、およびこのような基板処理装置において実行可能な基板処理方法に関する。処理の対象となる基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、セラミック基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
特許文献1は、ウエハに対して同じ処理を施す複数のプロセス系と、これらのプロセス系にウエハ搬送テーブルに従ってウエハを搬送するトランスポートモジュールとを備え、複数のプロセス系で基板を分散処理する半導体製造装置を開示している。いずれかのプロセス系で障害が発生すると、残りの正常なプロセス系に対してウエハを搬入するように、ウエハ搬送テーブルが書き換えられる。
【0003】
特許文献2は、同一の処理を並行して実行する並行処理部群を構成する複数の処理部のいずれかに故障が発生したときに、故障した処理部に搬送すべき基板を、前記並行処理部群の残りの処理部へ搬送するようにした基板処理装置を開示している。
特許文献3は、レジスト塗布・露光・現像処理システムを開示している。このシステムでは、2台の塗布モジュールの一方で障害が発生したときに、次に塗布モジュールに搬入すべきウエハが退避モジュールに退避させられる。そして、正常な塗布モジュールから処理済みのウエハが搬出されると、その後に、前記退避モジュールに退避させたウエハが当該正常な塗布モジュールに搬入されて処理される。退避モジュールが使用不可能のときは、搬送先の塗布モジュールのトラブルが解消するまで、搬送が停止される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−50948号公報
【特許文献2】特開平11−16983号公報
【特許文献3】特開2006−203003号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1および特許文献2の先行技術は、同じ処理を並行して行う複数のユニットが存在する場合の障害対策を提供している。したがって、これらの先行技術は、同じ処理を行うユニットが複数存在しない基板処理装置には適用できない。
また、特許文献3のシステムは、搬送先のユニットに障害が生じた場合に退避モジュールへと基板を退避させるように構成されている。したがって、退避モジュールが必要であるから、このような退避モジュールを設けることができない基板処理装置においては、基板搬送の途中で搬送先のユニットに障害が発生すると、その障害が解消されるまで、基板搬送動作を中断せざるをえない。退避モジュールが使用不可能のときも、基板退避場所がなくなるので同様であり、基板搬送が中断される。このように基板搬送が中断されてしまうと、たとえば、基板処理装置内に処理済みの基板が存在している場合であっても、そのような処理済みの基板の搬出が滞り、処理済みの基板を次工程へと送り出すことができない。
【0006】
そこで、この発明の目的は、あるユニットに障害が発生したときに、当該障害が生じたユニットを代替できる他のユニットがなく、かつ基板退避場所がなくても、基板搬送を継続できる基板処理装置および基板処理方法を提供することである。
【課題を解決するための手段】
【0007】
上記の目的を達成するための請求項1記載の発明の基板処理装置は、基板を保持することができる複数のユニット(1〜3;27,31〜33)と、前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンド(11,12;51,52,41,42)を有する搬送ロボット(6;26,36)と、前記複数のユニットのいずれかに発生した障害を検知する障害検知手段(1S,2S,3S;27S,31S,32S,33S)と、前記障害検知手段によって障害発生が検知されているユニットに基板を渡さないように前記搬送ロボットを制御するロボット制御手段(7;30)とを含む。前記ロボット制御手段は、一つのユニットに搬入すべき基板を一つのハンドで保持しているときに当該ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするように前記搬送ロボットを制御する障害制御を実行するようにプログラムされている。なお、括弧内の英数字は後述の実施形態における対応構成要素等を表すが、特許請求の範囲を実施形態に限定する趣旨ではない。以下、この項において同じ。
【0008】
この構成によれば、搬送先のユニットに搬入すべき基板を一つのハンドで保持しているときに当該搬送先のユニットに障害が発生すると、その基板を当該一つのハンドで保持したままで、残りのハンドで他のユニットとの間での基板受け渡しが行われる。したがって、搬送先ユニットへの基板搬送を停止しつつ、当該搬送先ユニットへ搬入すべき基板を退避場所に一時退避させたりすることなく、他のユニットに対する基板搬送を継続できる。よって、搬送先のユニットを代替できる他のユニットがなく、かつ基板退避場所がない場合であっても、基板搬送を継続できる。
【0009】
請求項2記載の発明は、前記複数のユニットが、基板に対して処理を行う処理ユニット(1〜3;27,31〜33)を含む、請求項1に記載の基板処理装置である。基板に対する処理とは、基板の状態を変化させることをいい、流体(液体または気体)や洗浄ブラシ等によって基板の表面を化学的または物理的に処理する場合(たとえば表面状態を変化させる処理)のほか、基板の姿勢を変化(たとえば上下反転)させる処理も含む。
【0010】
請求項3記載の発明は、前記複数の処理ユニットが、異なる処理を実行するように構成されている、請求項2に記載の基板処理装置である。複数の処理ユニットが全て異なる処理を実行する場合、一つの処理ユニットは他の処理ユニットによって代替できない。したがって、一つの処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該一つの処理ユニットに障害が発生すると、当該基板は他のいずれの処理ユニットにも搬入することができない。このような状況であっても、この発明によれば、その一つのハンドで基板を保持したまま、残りのハンドによって他の処理ユニットに対する基板の搬入/搬出を行うことができる。これによって、基板処理を継続できる。したがって、たとえば、処理済みの基板が処理ユニットに長時間保持されたままになったりすることがない。
【0011】
請求項4記載の発明は、前記ロボット制御手段は、前記障害が発生している一つのユニットの当該障害が解消したとき、前記一つのハンドで保持している基板を当該ユニットに渡すように前記搬送ロボットを制御するようにプログラムされている、請求項1〜3のいずれか一項に記載の基板処理装置である。この構成によれば、障害から復旧したときに、基板搬送を再開できる。
【0012】
請求項5記載の発明は、基板を保持することができる複数のユニットと、前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンドを有する搬送ロボットとを含む基板処理装置における基板処理方法であって、前記複数のユニットのいずれかに発生した障害を検知する障害検知ステップと、前記搬送ロボットが一つのユニットに搬入すべき基板を一つのハンドで保持しているときに前記障害検知ステップによって当該ユニットに発生した障害が検知された場合に、前記搬送ロボットが当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするステップとを含む、基板処理方法である。この方法により、請求項1の発明と同様の効果が得られる。この方法の発明についても、基板処理装置の発明と同様な変形が可能である。
【図面の簡単な説明】
【0013】
【図1】図1は、この発明の第1の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。
【図2】図2は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。
【図3A】図3A〜3Eは、いずれの処理ユニットにも障害が生じていないときの動作例を説明するための状態遷移図である。
【図3B】図3Aの次の状態を示す図である。
【図3C】図3Bの次の状態を示す図である。
【図3D】図3Cの次の状態を示す図である。
【図3E】図3Dの次の状態を示す図である。
【図4A】図4A〜4Hは、処理ユニットに障害が生じたときの動作例を説明するための状態遷移図である。
【図4B】図4Aの次の状態を示す図である。
【図4C】図4Bの次の状態を示す図である。
【図4D】図4Cの次の状態を示す図である。
【図4E】図4Dの次の状態を示す図である。
【図4F】図4Eの次の状態を示す図である。
【図4G】図4Fの次の状態を示す図である。
【図4H】図4Gの次の状態を示す図である。
【図5】図5は、障害発生時に基板をハンドに保持した状態で搬送ロボットを動作させることによる一つの効果を説明するための図である。
【図6】図6は、障害発生時に基板をハンドに保持した状態で搬送ロボットを動作させることによる他の効果を説明するための図である。
【図7】図7は、この発明の第2の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。
【図8】図8は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。
【図9】図9は、反転受渡ユニットに障害が発生していないときにインデクサロボットが実行する搬送動作を示す図である。
【図10A】図10A〜10Iは、反転受渡ユニットに障害が発生したときのインデクサロボットの動作(障害制御)を説明するための図である。
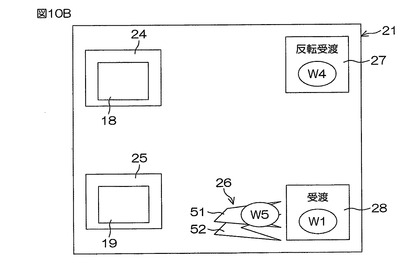
【図10B】図10Aの次の状態を示す図である。
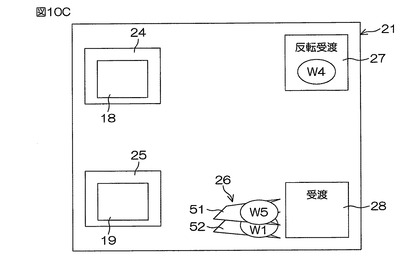
【図10C】図10Bの次の状態を示す図である。
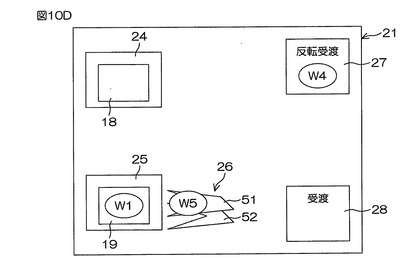
【図10D】図10Cの次の状態を示す図である。
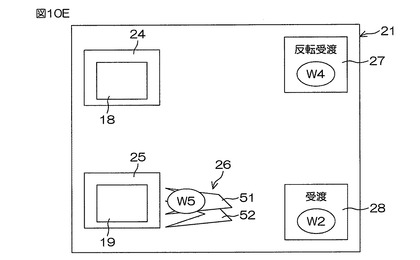
【図10E】図10Dの次の状態を示す図である。
【図10F】図10Eの次の状態を示す図である。
【図10G】図10Fの次の状態を示す図である。
【図10H】図10Gの次の状態を示す図である。
【図10I】図10Hの次の状態を示す図である。
【発明を実施するための形態】
【0014】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
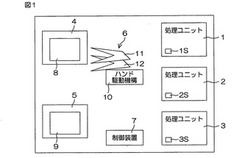
図1は、この発明の第1の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。この基板処理装置は、3つの処理ユニット1,2,3と、未処理基板載置部4と、処理済み基板載置部5と、搬送ロボット6と、制御装置7とを含む。処理ユニット1,2,3は、それぞれ、基板を保持して、その保持した基板に対して処理を行うユニットであり、この実施形態では、互いに異なる処理を基板に対して実行するように構成されている。処理ユニット1,2,3には、障害検知手段の一例である各種のセンサ類1S,2S,3Sが備えられている。これらのセンサ類1S,2S,3Sの出力を監視することによって、処理ユニット1,2,3に生じた障害を検知できる。
【0015】
処理対象の基板は、半導体ウエハであってもよいし、液晶表示装置用基板であってもよいし、その他の基板であってもよい。このような基板に対する処理としては、基板に対して流体(液体または気体)を供給する処理、基板を乾燥する処理、基板に対して紫外線を照射する処理、基板の姿勢を変化(たとえば上下反転)させる処理などを例示できる。
未処理基板載置部4は、たとえば、未処理基板を収容した基板収容器8を載置可能なユニットであってもよい。同様に、処理済み基板載置部5は、たとえば、処理済み基板を収容するための基板収容器9を載置可能なユニットであってもよい。
【0016】
搬送ロボット6は、複数(たとえば2本)のハンド11,12と、これらのハンド11,12を駆動するハンド駆動機構10とを備えている。ハンド11は、それぞれ基板を1枚ずつ保持することができるように構成されている。ハンド駆動機構10は、たとえば、ハンド11,12を水平方向に移動させる水平移動機構と、ハンド11,12を鉛直方向に移動させる昇降機構と、ハンド11,12の向きを鉛直軸線まわりで変化させるための回転機構とを備えていてもよい。これにより、ハンド11,12を水平方向および鉛直方向に移動させ、かつその向きを変えることができるので、処理ユニット1,2,3、未処理基板載置部4および処理済み基板載置部5にアクセスさせ、それらとの間で基板の受け渡しをさせることができる。
【0017】
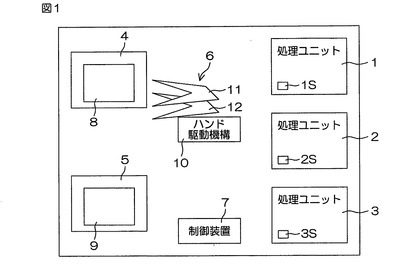
図2は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。制御装置7は、マイクロコンピュータ等を含み、予め定められたプログラムを実行することによって、処理ユニット1,2,3の動作および搬送ロボット6の動作を制御する。すなわち、制御装置7は、搬送ロボット6を制御するロボット制御手段として機能する。制御装置7には、処理ユニット1,2,3および搬送ロボット6(より具体的にはハンド駆動機構10)が制御対象として接続されている。処理ユニット1,2,3に備えられたセンサ類1S,2S,3Sの信号は、制御装置7に入力されている。制御装置7は、これらのセンサ類1S,2S,3Sの出力信号を監視することによって、いずれかの処理ユニット1,2,3に障害が発生したときに、これを検知する障害検知動作を実行するようにプログラムされている。さらに、制御装置7は、いずれかの処理ユニット1,2,3に障害が発生したときに、予め定める障害制御(後に詳しく説明する。)を実行するようにプログラムされている。
【0018】
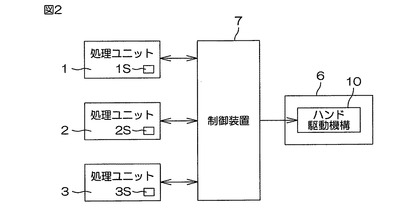
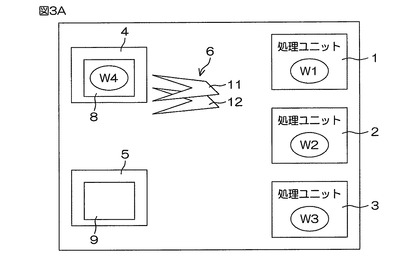
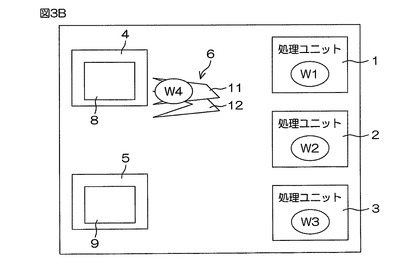
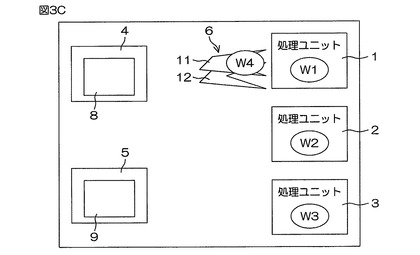
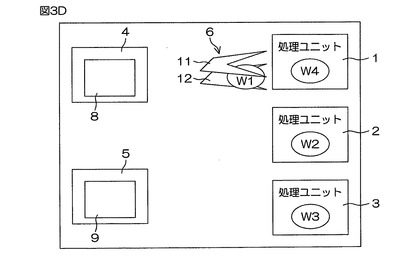
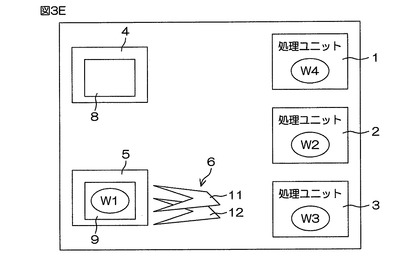
図3A〜3Eは、いずれの処理ユニット1,2,3にも障害が生じていないときの動作例を説明するための状態遷移図であり、制御装置7が通常制御に従って各部を制御することによって実現される動作例を示す。図3Aは、処理ユニット1,2,3において、基板W1,W2,W3がそれぞれ処理されていて、搬送ロボット6が、未処理基板載置部4の基板収容器8から次の未処理基板W4を搬出しようとしている状態を示す。この状態から、搬送ロボット6が、一つのハンド11で未処理基板W4を基板収容器8から搬出して保持すると、図3Bの状態となる。次に、図3Cに示すように、搬送ロボット6は、ハンド11,12を処理ユニット1の前まで移動させ、かつ当該処理ユニット1に対向させる。そして、図3Dに示すように、搬送ロボット6は、空いているハンド12で処理済みの基板W1を処理ユニット1から搬出し、ハンド11に保持している未処理基板W4を処理ユニット1に搬入する。すなわち、処理ユニット1に対して、処理済み基板W1と未処理基板W4との入れ換え動作を実行する。次いで、図3Eに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9まで移動させ、かつ当該基板収容器9に対向させる。そして、ハンド12に保持している基板W1を基板収容器9に搬入する。
【0019】
同様の動作が他の処理ユニット2,3に対しても実行される。ただし、基板収容器9に保持されている未処理基板は、それぞれ、予めいずれの処理ユニットによって処理すべきかが指定されており、その指定情報は予め制御装置7に保持されている。制御装置7は、
その指定情報に従って、搬送ロボット6の基板搬送動作を制御するようにプログラムされている。
【0020】
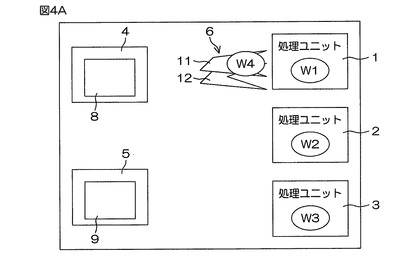
図4A〜4Hは、処理ユニットに障害が生じたときの動作例を説明するための状態遷移図であり、制御装置7が障害制御によって各部を制御することによって実現される動作例を示す。図4Aは、処理ユニット1,2,3において、基板W1,W2,W3がそれぞれ処理されていて、搬送ロボット6が、未処理基板載置部4の基板収容器8から次の未処理基板W4を搬出してハンド11に保持している状態を示す。基板W4は、処理ユニット1によって処理すべき基板であり、他の処理ユニット2,3によってその処理を代替することはできない。搬送ロボット6が未処理基板W4を保持する前に処理ユニット1に障害が発生すれば、制御装置7は、未処理基板W4を基板収容器8から搬出しない。一方、搬送ロボット6が未処理基板W4を保持してしまった後に、処理ユニット1での障害発生が検知されると、図4Aの状態となり、その未処理基板W4は、処理ユニット1〜3のいずれにも搬入することができなくなる。
【0021】
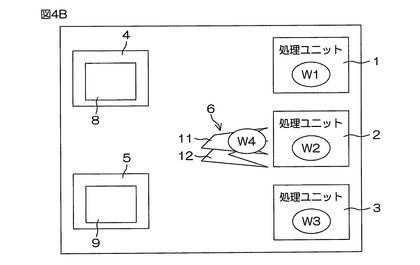
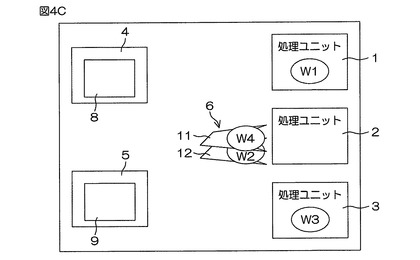
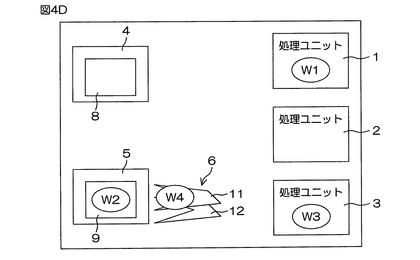
このような場合、搬送ロボット6は、処理ユニット2,3における基板W2,3の処理が終了すると、それらの基板W2,3を搬出する動作を実行する。すなわち、処理ユニット2での処理が終了すると、図4Bに示すように、搬送ロボット6は、ハンド11に未処理基板W4を保持したまま、処理ユニット2の前に移動し、ハンド12を処理ユニット2に向ける。そして、図4Cに示すように、搬送ロボット6は、空いているハンド12を処理ユニット2に搬入させ、処理済みの基板W2を搬出する。さらに、図4Dに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9の前に移動させ、当該基板収容器9に対向させる。その後、搬送ロボット6は、ハンド12を基板収容器9に進入させ、処理済み基板W2を基板収容器9に搬入する。
【0022】
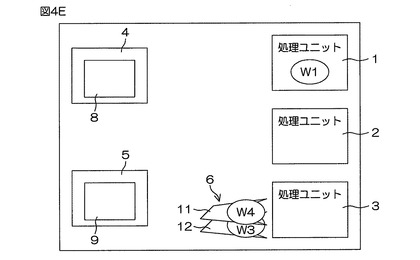
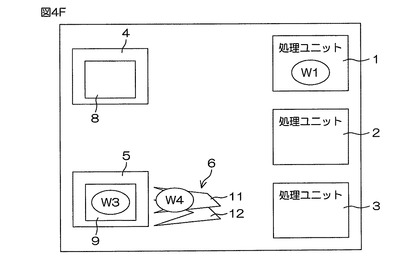
同様に、処理ユニット3での処理が終了すると、図4Eに示すように、搬送ロボット6は、ハンド11に未処理基板W4を保持したまま、処理ユニット3の前に移動し、ハンド12を処理ユニット3に向ける。そして、搬送ロボット6は、空いているハンド12を処理ユニット3に搬入させ、処理済みの基板W3を搬出する。さらに、図4Fに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9の前に移動させ、当該基板収容器9に対向させる。その後、搬送ロボット6は、ハンド12を基板収容器9に進入させ、処理済み基板W3を基板収容器9に搬入する。
【0023】
このようにして、処理ユニット1に障害が発生した場合であっても、搬送ロボット6は搬送動作を継続し、処理ユニット2,3から処理済みの基板W2,W3を搬出して基板収容器9に収納できる。したがって、処理済みの基板W2,W3が処理ユニット2,3内に置き去りにされて長時間放置されることを回避できる。処理済みの基板W2,W3を基板収容器9に収容した後にも、処理ユニット1の障害が解消していなければ、搬送ロボット6は、搬送動作を停止する。
【0024】
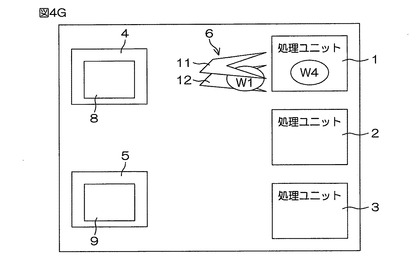
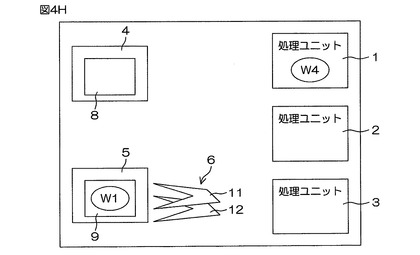
処理ユニット1における障害が解消して正常状態に復旧し、処理ユニット1における処理が終了すると、図4Gに示すように、搬送ロボット6は、空いているハンド12を処理ユニット1に進入させて、処理済み基板W1を搬入させ、ハンド11に保持している未処理基板W4を処理ユニット1に搬入する。そして、図4Hに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9の前に移動させ、それらを基板収容器9に対向させる。そして、搬送ロボット6は、ハンド12を基板収容器9に進入させて、処理済み基板W1を基板収容器9に搬入する。
【0025】
このように、この実施形態によれば、搬送先の処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該搬送先の処理ユニットに障害が発生すると、その基板を当該一つのハンドで保持したままで、残りのハンドで他のユニットとの間での基板受け渡しが行われる。したがって、搬送先の処理ユニットへの基板搬送を停止しつつ、かつ当該搬送先ユニットへ搬入すべき基板を退避場所に一時退避させたりすることなく、他の処理ユニットに対する基板搬送を継続できる。よって、搬送先のユニットを代替できる他のユニットがなく、かつ基板退避場所がない場合であっても、基板搬送を継続できる。これによって、処理済みの基板が処理ユニットに長時間保持されたままになったりすることがない。
【0026】
また、障害が発生している処理ユニットの当該障害が解消すると、搬送ロボット6は、前記一つのハンドで保持している基板を当該処理ユニットに渡す。これにより、障害から復旧したときに、通常の基板搬送動作を再開できる。
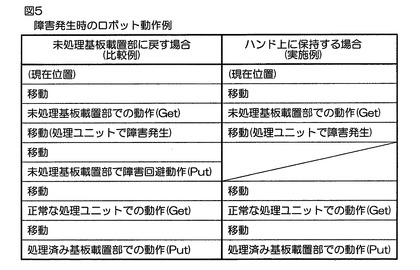
図5は、障害発生時に基板をハンドに保持した状態で搬送ロボット6を動作させることによる一つの効果を説明するための図である。一つのハンドで未処理基板を保持しているときに、その未処理基板の搬入先の処理ユニットで障害が発生した場合に、その未処理基板を基板収容器8に一旦戻すことが考えられる。この場合の動作ステップを図5の左欄(比較例)に示す。また、障害発生時に当該未処理基板を一つのハンドで保持したまま別のハンドで処理済み基板の搬送動作を継続する場合の動作ステップを図5の右欄(実施例)に示す。
【0027】
搬送ロボット6は、現在位置からハンド11,12を基板収容器8まで移動させ、一つのハンド11で、基板収容器8から未処理基板を搬出する(Get)。これにより、ハンド11は未処理基板を保持した状態となる。この状態で、当該未処理基板を搬入すべき処理ユニットに障害が発生したとする。
未処理基板を基板収容器8に一旦戻す動作(図5の左欄)は、基板収容器8へのハンド11の移動、および基板収容器8への未処理基板の搬入(障害回避動作。Put)を含む。その後、搬送ロボット6は、ハンド11,12を、正常な処理ユニットに移動させて、処理済み基板を搬出(Get)させることになる。
【0028】
未処理基板を基板収容器8に戻すことなく、ハンド11に保持したままであれば、ハンド11の基板収容器8への移動、およびその基板収容器8への未処理基板の搬入(障害回避動作。Put)の各動作を省くことができる。したがって、空いているハンド12を正常な処理ユニットまで速やかに移動させ、その処理ユニットから処理済み基板を搬出(Get)できる。そして、ハンド12を基板収容器9へと移動させ、その基板収容器9に処理済み基板を搬入(Put)できる。
【0029】
このように、この実施形態の基板処理装置においては、搬送ロボット6は、障害が発生した処理ユニットに搬入すべき基板を一つのハンドで保持したまま、正常な処理ユニットから処理済み基板を搬出するように動作するので、処理済み基板を速やかに搬出して基板収容器9に収容できる。
図6は、障害発生時に基板をハンドに保持した状態で搬送ロボット6を動作させることによる他の効果を説明するための図である。一つのハンドで未処理基板を保持しているときに、その未処理基板の搬入先の処理ユニットで障害が発生した場合に、その未処理基板を基板収容器8に一旦戻したとする(図5の左欄の動作)。この場合における障害復旧動作ステップを図6の左欄(比較例)に示す。また、障害発生時に当該未処理基板を一つのハンドで保持したまま別のハンドで処理済み基板の搬送動作を継続する場合(図5の右欄の動作)における障害復旧動作ステップを図6の右欄(実施例)に示す。
【0030】
図6の左欄(比較例)の動作では、搬送ロボット6は、現在位置からハンド11,12を基板収容器8まで移動させ、一つのハンド11で、基板収容器8から未処理基板を搬出する(Get)。このとき搬出される未処理基板は、障害復旧した処理ユニットにおいて処理すべき基板である。次に、搬送ロボット6は、ハンド11,12を障害復旧した処理ユニットの前まで移動させ、その処理ユニットに当該未処理基板を搬入させる(Put)。
【0031】
一方、図6の右欄(実施形態)の動作では、搬送ロボット6は、ハンド11に障害復旧した処理ユニットに搬入すべき基板を保持したままなので、基板収容器8までの移動、および基板収容器8からの基板搬出を省くことができる。すなわち、障害復旧した処理ユニットまでハンド11をただちに移動させ、処理ユニットに対して未処理基板を搬入できる(Put)。
【0032】
このように、この実施形態の基板処理装置においては、搬送ロボット6は、障害が発生した処理ユニットに搬入すべき基板を一つのハンドで保持したまま、正常な処理ユニットから処理済み基板を搬出するように動作するので、障害復旧した処理ユニットに対して速やかに未処理基板を搬入できる。
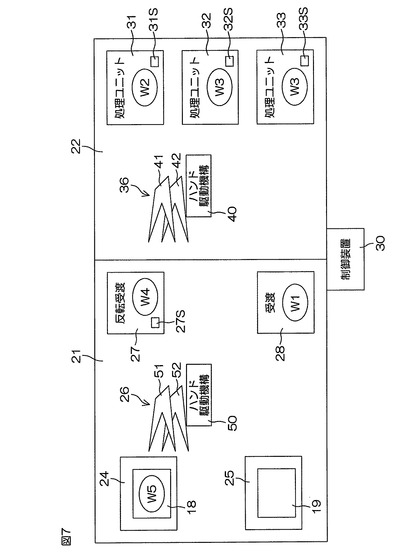
図7は、この発明の第2の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。この基板処理装置は、インデクサセクション21と、プロセスセクション22とを含む。インデクサセクション21は、未処理基板載置部24と、処理済み基板載置部25と、インデクサロボット26と、反転受渡ユニット27と、受渡ユニット28とを含む。プロセスセクション22は、処理ユニット31,32,33と、主搬送ロボット36とを含む。インデクサセクション21およびプロセスセクション22の各部は、制御装置30によって制御される。また、反転受渡ユニット27(基板姿勢を変化させる処理ユニットの一例)、および処理ユニット31,32,33には、各種のセンサ類27S,31S,32S,33Sが備えられている。これらのセンサ類27S,31S,32S,33Sの出力を監視することによって、ユニット27,31,32,33に生じた障害を検知できる。
【0033】
処理ユニット31〜33は、この実施形態では、互いに異なる処理を基板に対して施すように構成されている。処理ユニット31は、たとえば、基板を保持して、その基板の裏面を処理(たとえば洗浄処理やエッチング処理)する裏面処理ユニットであってもよい。また、処理ユニット32は、基板を保持して、その姿勢を表裏反転する反転ユニットであってもよい。さらに、処理ユニット33は、基板を保持して、その基板の表面を処理(たとえば洗浄処理やエッチング処理)する表面処理ユニットであってもよい。
【0034】
処理対象の基板は、半導体ウエハであってもよいし、液晶表示装置用基板であってもよいし、その他の基板であってもよい。
主搬送ロボット36は、複数(たとえば2本)のハンド41,42と、これらのハンド41,42を駆動するハンド駆動機構40とを備えている。ハンド41は、それぞれ基板を1枚ずつ保持することができるように構成されている。ハンド駆動機構40は、たとえば、ハンド41,42を水平方向に移動させる水平移動機構と、ハンド41,42を鉛直方向に移動させる昇降機構と、ハンド41,42の向きを鉛直軸線まわりで変化させるための回転機構とを備えていてもよい。これにより、ハンド41,42を水平方向および鉛直方向に移動させ、かつその向きを変えることができるので、反転受渡ユニット27、処理ユニット31,32,33、および受渡ユニット28にアクセスさせ、それらとの間で基板の受け渡しをさせることができる。
【0035】
未処理基板載置部24は、たとえば、未処理基板を収容した基板収容器18を載置可能なユニットであってもよい。同様に、処理済み基板載置部25は、たとえば、処理済み基板を収容するための基板収容器19を載置可能なユニットであってもよい。
反転受渡ユニット27は、基板の表裏を反転させる表裏反転機構を備えている。反転受渡ユニット27は、インデクサロボット26によってアクセス可能に構成されており、インデクサロボット26から渡された基板を表裏反転するように構成されている。また、反転受渡ユニット27は、主搬送ロボット36によってアクセス可能に構成されており、表裏反転された基板が主搬送ロボット36によって搬出されるように構成されている。
【0036】
受渡ユニット28は、処理済み基板の置き場所を提供するユニットである。受渡ユニット28は、インデクサロボット26および主搬送ロボット36によってアクセス可能に構成されている。より具体的には、受渡ユニット28は、主搬送ロボット36によって処理済み基板が置かれ、その置かれた処理済み基板がインデクサロボット26によって搬出されるように構成されている。
【0037】
インデクサロボット26は、複数(たとえば2本)のハンド51,52と、これらのハンド51,52を駆動するハンド駆動機構50とを備えている。ハンド51,52は、それぞれ基板を1枚ずつ保持することができるように構成されている。ハンド駆動機構50は、たとえば、ハンド51,52を水平方向に移動させる水平移動機構と、ハンド51,52を鉛直方向に移動させる昇降機構と、ハンド51,52の向きを鉛直軸線まわりで変化させるための回転機構とを備えていてもよい。これにより、ハンド51,52を水平方向および鉛直方向に移動させ、かつその向きを変えることができるので、反転受渡ユニット27、未処理基板載置部24、処理済み基板載置部25および受渡ユニット28にアクセスさせ、それらとの間で基板の受け渡しをさせることができる。
【0038】
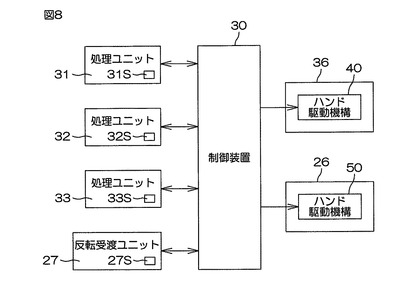
図8は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。制御装置30は、マイクロコンピュータ等を含み、予め定められたプログラムを実行することによって、インデクサロボット26、反転受渡ユニット27、処理ユニット31,32,33および主搬送ロボット36の各動作を制御する。したがって、制御装置30には、インデクサロボット26(より具体的にはハンド駆動機構50)、反転受渡ユニット27、処理ユニット31,32,33および主搬送ロボット36(より具体的にはハンド駆動機構40)が制御対象として接続されている。反転受渡ユニット27、および処理ユニット31,32,33に備えられたセンサ類27S,31S,32S,33Sの信号は、制御装置30に入力されている。制御装置30は、これらのセンサ類27S,31S,32S,33Sの出力信号を監視することによって、ユニット27,31,32,33のいずれかに障害が発生したときに、これを検知する障害検知動作を実行するようにプログラムされている。さらに、制御装置30は、ユニット27,31,32,33のいずれかに障害が発生したときに、予め定める障害制御(後に詳しく説明する。)を実行するようにプログラムされている。
【0039】
図9は、反転受渡ユニット27に障害が発生していないときにインデクサロボット26が実行する搬送動作を示す図である。インデクサロボット26は、制御装置30による通常制御に従って、たとえば、次のように動作する。インデクサロボット26は、未処理基板載置部24に載置された基板収容器18に一つのハンド51をアクセスさせ、その基板収容器18から一枚の未処理基板を取り出す。さらに、インデクサロボット26は、未処理基板を保持したハンド51を反転受渡ユニット27まで移動させ、ハンド51からその反転受渡ユニット27に未処理基板を渡す。その後、インデクサロボット26は、受渡ユニット28に一つのハンド52をアクセスさせ、受渡ユニット28から一枚の処理済み基板を受け取る。さらに、インデクサロボット26は、その処理済み基板を保持したハンド52を処理済み基板載置部25に載置された基板収容器19まで移動させ、その基板収容器19に処理済み基板を搬入する。このように、インデクサロボット26は、基板収容器18から反転受渡ユニット27へと未処理基板を搬送し、受渡ユニット28から基板収容器19へと処理済み基板を搬送する動作を繰り返す。
【0040】
主搬送ロボット36は、制御装置30による通常制御に従って、たとえば、次のように動作する。主搬送ロボット36は、一つのハンド41を反転受渡ユニット27にアクセスさせ、表裏反転された未処理基板を受け取る。主搬送ロボット36は、その未処理基板を保持したハンド41を裏面処理ユニット31にアクセスさせ、ハンド41から裏面処理ユニット31にその未処理基板を受け渡す。また、主搬送ロボット36は、裏面処理ユニット31に処理済みの基板があるときには、ハンド42でその処理済み基板を搬出した後、ハンド41上の未処理基板を裏面処理ユニット31に搬入する。さらに、主搬送ロボット36は、ハンド41,42を反転処理ユニット32にアクセスさせ、反転処理後の基板を一つのハンド41で搬出し、裏面処理ユニット31から搬出した裏面処理後の基板を別のハンド42で反転処理ユニット32に搬入する。また、主搬送ロボット36は、ハンド41,42を表面処理ユニット33にアクセスさせ、表面処理後の基板を一つのハンド42で搬出し、反転処理ユニット32から搬出した基板を別のハンド41で表面処理ユニット33に搬入する。そして、主搬送ロボット36は、表面処理ユニット33から搬出した基板を保持したハンド42を受渡ユニット28にアクセスさせ、この受渡ユニット28に受け渡す。
【0041】
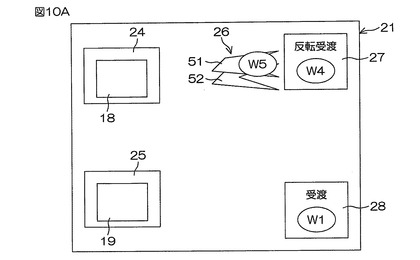
図10A〜10Iは、反転受渡ユニット27に障害が発生したときのインデクサロボット26の動作(障害制御)を説明するための図であり、インデクサセクション21の状態遷移を示す。反転受渡ユニット27における障害の例は、たとえば、基板姿勢反転の途中で反転動作が停止してしまった場合、反転途中で基板が落下してしまった場合などがある。
【0042】
この動作は、制御装置30が障害制御によって各部(とくにインデクサロボット26)を制御することによって実現される。図10Aは、プロセスセクション22によって処理された処理済みの基板W1が受渡ユニット28に保持されており、インデクサロボット26が、未処理基板載置部24の基板収容器18から未処理基板W5を搬出して一つのハンド51に保持しており、さらに反転受渡ユニット27において未処理基板W4の反転処理が行われている状態を示す。インデクサロボット26が未処理基板W5を保持する前に反転受渡ユニット27に障害が発生すれば、制御装置30は、未処理基板W5を基板収容器18から搬出しない。一方、インデクサロボット26が未処理基板W5を保持してしまった後に反転受渡ユニット27に障害が発生すると、図10Aの状態となり、その未処理基板W5を反転受渡ユニット27に搬入することができなくなる。
【0043】
このような場合、インデクサロボット26は、反転受渡ユニット27に対する未処理基板W5の搬入動作を中断する一方で、受渡ユニット28から処理済み基板を搬出する動作を実行する。すなわち、図10Bに示すように、インデクサロボット26は、ハンド51に未処理基板W5を保持したまま、空いているハンド52を受渡ユニット28の前に移動させ、そのハンド52を受渡ユニット28に向ける。そして、図10Cに示すように、インデクサロボット26は、空いているハンド52を受渡ユニット28に搬入させ、処理済みの基板W1を搬出する。さらに、図10Dに示すように、インデクサロボット26は、ハンド52を処理済み基板載置部25の基板収容器19の前に移動させ、当該基板収容器19に対向させる。その後、インデクサロボット26は、ハンド52を基板収容器19に進入させ、処理済み基板W1を基板収容器19に搬入する。同様に、図10Eに示すように、プロセスセクション22が次の処理済み基板W2を受渡ユニット28に払い出すと、図10Fに示すように、インデクサロボット26は、ハンド51に未処理基板W5を保持したまま、受渡ユニット28の前に空いているハンド52を移動させ、そのハンド52を受渡ユニット28に向ける。そして、インデクサロボット26は、空いているハンド52を受渡ユニット28に進入させ、処理済みの基板W2を搬出する。さらに、図10Gに示すように、インデクサロボット26は、処理済み基板W2を保持したハンド52を処理済み基板載置部25の基板収容器19の前に移動させ、当該基板収容器19に対向させる。その後、インデクサロボット26は、ハンド52を基板収容器19に進入させ、処理済み基板W2を基板収容器19に搬入する。
【0044】
このようにして、反転受渡ユニット27に障害が発生した場合であっても、インデクサロボット26は搬送動作を継続し、プロセスセクション22での処理が終了した処理済みの基板W1,W2を搬出して基板収容器19に収納できる。したがって、処理済みの基板W1,W2が受渡ユニット28やプロセスセクション22内に置き去りにされて長時間放置されることを回避できる。プロセスセクション22から全ての処理済みの基板が払い出され、それらの処理済み基板を全て基板収容器19に収容した後にも反転受渡ユニット27の障害が解消していなければ、インデクサロボット26は、搬送動作を停止する。
【0045】
反転受渡ユニット27における障害が解消して正常状態に復旧し、反転受渡ユニット27における基板反転処理が終了し、その反転された未処理基板W4が主搬送ロボット36によって搬出されると(図10H参照)、インデクサロボット26は、ハンド51を反転受渡ユニット27に進入させて、未処理基板W5を反転受渡ユニット27に搬入する(図10I参照)。こうして、インデクサロボット26の通常の動作が再開される。
【0046】
このように、この実施形態によれば、インデクサロボット26は、反転受渡ユニット27に搬入すべき基板を一つのハンドで保持しているときに反転受渡ユニット27に障害が発生すると、その基板を当該一つのハンドで保持したままで、残りのハンドで受渡ユニット28から基板収容器19へと処理済み基板を搬送する。したがって、障害が発生した反転受渡ユニット27への基板搬送を停止しつつ、かつ反転受渡ユニット27へ搬入すべき基板を退避場所に一時退避させたりすることなく、受渡ユニット28からの未処理基板搬出動作を継続できる。これによって、処理済みの基板が受渡ユニット28やプロセスセクション22に長時間保持されたままになったりすることがない。
【0047】
また、反転受渡ユニット27が障害から復旧すると、インデクサロボット26は、前記一つのハンドで保持している基板を速やかに反転受渡ユニット27に渡す。これにより、障害から復旧したときに、通常の基板搬送動作を再開できる。
反転受渡ユニット27に障害が発生したときに、未処理基板を、一旦、基板収容器18に戻すことが考えられる(障害回避動作)。しかし、このような障害回避動作を行わず、未処理基板を一つのハンドで保持したままの方が、基板搬送に要する時間を短縮できる。このことは、前述の第1の実施形態において図5および図6を参照して説明した考察と同様の考察を行うことによって裏付けられる。
【0048】
プロセスセクション22の処理ユニット31〜33のいずれかにおいて障害が発生したときの動作は、前述の第1の実施形態の場合と同様である。すなわち、主搬送ロボット36からインデクサセクション21を見た場合に、反転受渡ユニット27は「未処理基板載置部」であり、受渡ユニット28は「処理済み基板載置部」である。よって、障害発生時には、制御装置30は、主搬送ロボット36を第1の実施形態における搬送ロボット6と同様に動作させればよい。
【0049】
以上、この発明の実施形態について説明してきたが、この発明は、さらに他の形態で実施することもでき、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0050】
1,2,3 処理ユニット
1S,2S,3S センサ類
4 未処理基板載置部
5 処理済み基板載置部
6 搬送ロボット
7 制御装置
8 基板収容器
9 基板収容器
11,12 ハンド
18 基板収容器
19 基板収容器
21 インデクサセクション
22 プロセスセクション
24 未処理基板載置部
25 処理済み基板載置部
26 インデクサロボット
27 反転受渡ユニット
27S,31S,32S,33S センサ類
28 受渡ユニット
30 制御装置
31,32,33 処理ユニット
36 主搬送ロボット
40 ハンド駆動機構
41,42 ハンド
50 ハンド駆動機構
51,52 ハンド
52 ハンド
W1〜W5 基板
【技術分野】
【0001】
この発明は、基板を保持することができる複数のユニットと、この複数のユニットとの間で基板を受け渡しすることができる搬送ロボットとを備えた基板処理装置、およびこのような基板処理装置において実行可能な基板処理方法に関する。処理の対象となる基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、セラミック基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
特許文献1は、ウエハに対して同じ処理を施す複数のプロセス系と、これらのプロセス系にウエハ搬送テーブルに従ってウエハを搬送するトランスポートモジュールとを備え、複数のプロセス系で基板を分散処理する半導体製造装置を開示している。いずれかのプロセス系で障害が発生すると、残りの正常なプロセス系に対してウエハを搬入するように、ウエハ搬送テーブルが書き換えられる。
【0003】
特許文献2は、同一の処理を並行して実行する並行処理部群を構成する複数の処理部のいずれかに故障が発生したときに、故障した処理部に搬送すべき基板を、前記並行処理部群の残りの処理部へ搬送するようにした基板処理装置を開示している。
特許文献3は、レジスト塗布・露光・現像処理システムを開示している。このシステムでは、2台の塗布モジュールの一方で障害が発生したときに、次に塗布モジュールに搬入すべきウエハが退避モジュールに退避させられる。そして、正常な塗布モジュールから処理済みのウエハが搬出されると、その後に、前記退避モジュールに退避させたウエハが当該正常な塗布モジュールに搬入されて処理される。退避モジュールが使用不可能のときは、搬送先の塗布モジュールのトラブルが解消するまで、搬送が停止される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−50948号公報
【特許文献2】特開平11−16983号公報
【特許文献3】特開2006−203003号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1および特許文献2の先行技術は、同じ処理を並行して行う複数のユニットが存在する場合の障害対策を提供している。したがって、これらの先行技術は、同じ処理を行うユニットが複数存在しない基板処理装置には適用できない。
また、特許文献3のシステムは、搬送先のユニットに障害が生じた場合に退避モジュールへと基板を退避させるように構成されている。したがって、退避モジュールが必要であるから、このような退避モジュールを設けることができない基板処理装置においては、基板搬送の途中で搬送先のユニットに障害が発生すると、その障害が解消されるまで、基板搬送動作を中断せざるをえない。退避モジュールが使用不可能のときも、基板退避場所がなくなるので同様であり、基板搬送が中断される。このように基板搬送が中断されてしまうと、たとえば、基板処理装置内に処理済みの基板が存在している場合であっても、そのような処理済みの基板の搬出が滞り、処理済みの基板を次工程へと送り出すことができない。
【0006】
そこで、この発明の目的は、あるユニットに障害が発生したときに、当該障害が生じたユニットを代替できる他のユニットがなく、かつ基板退避場所がなくても、基板搬送を継続できる基板処理装置および基板処理方法を提供することである。
【課題を解決するための手段】
【0007】
上記の目的を達成するための請求項1記載の発明の基板処理装置は、基板を保持することができる複数のユニット(1〜3;27,31〜33)と、前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンド(11,12;51,52,41,42)を有する搬送ロボット(6;26,36)と、前記複数のユニットのいずれかに発生した障害を検知する障害検知手段(1S,2S,3S;27S,31S,32S,33S)と、前記障害検知手段によって障害発生が検知されているユニットに基板を渡さないように前記搬送ロボットを制御するロボット制御手段(7;30)とを含む。前記ロボット制御手段は、一つのユニットに搬入すべき基板を一つのハンドで保持しているときに当該ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするように前記搬送ロボットを制御する障害制御を実行するようにプログラムされている。なお、括弧内の英数字は後述の実施形態における対応構成要素等を表すが、特許請求の範囲を実施形態に限定する趣旨ではない。以下、この項において同じ。
【0008】
この構成によれば、搬送先のユニットに搬入すべき基板を一つのハンドで保持しているときに当該搬送先のユニットに障害が発生すると、その基板を当該一つのハンドで保持したままで、残りのハンドで他のユニットとの間での基板受け渡しが行われる。したがって、搬送先ユニットへの基板搬送を停止しつつ、当該搬送先ユニットへ搬入すべき基板を退避場所に一時退避させたりすることなく、他のユニットに対する基板搬送を継続できる。よって、搬送先のユニットを代替できる他のユニットがなく、かつ基板退避場所がない場合であっても、基板搬送を継続できる。
【0009】
請求項2記載の発明は、前記複数のユニットが、基板に対して処理を行う処理ユニット(1〜3;27,31〜33)を含む、請求項1に記載の基板処理装置である。基板に対する処理とは、基板の状態を変化させることをいい、流体(液体または気体)や洗浄ブラシ等によって基板の表面を化学的または物理的に処理する場合(たとえば表面状態を変化させる処理)のほか、基板の姿勢を変化(たとえば上下反転)させる処理も含む。
【0010】
請求項3記載の発明は、前記複数の処理ユニットが、異なる処理を実行するように構成されている、請求項2に記載の基板処理装置である。複数の処理ユニットが全て異なる処理を実行する場合、一つの処理ユニットは他の処理ユニットによって代替できない。したがって、一つの処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該一つの処理ユニットに障害が発生すると、当該基板は他のいずれの処理ユニットにも搬入することができない。このような状況であっても、この発明によれば、その一つのハンドで基板を保持したまま、残りのハンドによって他の処理ユニットに対する基板の搬入/搬出を行うことができる。これによって、基板処理を継続できる。したがって、たとえば、処理済みの基板が処理ユニットに長時間保持されたままになったりすることがない。
【0011】
請求項4記載の発明は、前記ロボット制御手段は、前記障害が発生している一つのユニットの当該障害が解消したとき、前記一つのハンドで保持している基板を当該ユニットに渡すように前記搬送ロボットを制御するようにプログラムされている、請求項1〜3のいずれか一項に記載の基板処理装置である。この構成によれば、障害から復旧したときに、基板搬送を再開できる。
【0012】
請求項5記載の発明は、基板を保持することができる複数のユニットと、前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンドを有する搬送ロボットとを含む基板処理装置における基板処理方法であって、前記複数のユニットのいずれかに発生した障害を検知する障害検知ステップと、前記搬送ロボットが一つのユニットに搬入すべき基板を一つのハンドで保持しているときに前記障害検知ステップによって当該ユニットに発生した障害が検知された場合に、前記搬送ロボットが当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするステップとを含む、基板処理方法である。この方法により、請求項1の発明と同様の効果が得られる。この方法の発明についても、基板処理装置の発明と同様な変形が可能である。
【図面の簡単な説明】
【0013】
【図1】図1は、この発明の第1の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。
【図2】図2は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。
【図3A】図3A〜3Eは、いずれの処理ユニットにも障害が生じていないときの動作例を説明するための状態遷移図である。
【図3B】図3Aの次の状態を示す図である。
【図3C】図3Bの次の状態を示す図である。
【図3D】図3Cの次の状態を示す図である。
【図3E】図3Dの次の状態を示す図である。
【図4A】図4A〜4Hは、処理ユニットに障害が生じたときの動作例を説明するための状態遷移図である。
【図4B】図4Aの次の状態を示す図である。
【図4C】図4Bの次の状態を示す図である。
【図4D】図4Cの次の状態を示す図である。
【図4E】図4Dの次の状態を示す図である。
【図4F】図4Eの次の状態を示す図である。
【図4G】図4Fの次の状態を示す図である。
【図4H】図4Gの次の状態を示す図である。
【図5】図5は、障害発生時に基板をハンドに保持した状態で搬送ロボットを動作させることによる一つの効果を説明するための図である。
【図6】図6は、障害発生時に基板をハンドに保持した状態で搬送ロボットを動作させることによる他の効果を説明するための図である。
【図7】図7は、この発明の第2の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。
【図8】図8は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。
【図9】図9は、反転受渡ユニットに障害が発生していないときにインデクサロボットが実行する搬送動作を示す図である。
【図10A】図10A〜10Iは、反転受渡ユニットに障害が発生したときのインデクサロボットの動作(障害制御)を説明するための図である。
【図10B】図10Aの次の状態を示す図である。
【図10C】図10Bの次の状態を示す図である。
【図10D】図10Cの次の状態を示す図である。
【図10E】図10Dの次の状態を示す図である。
【図10F】図10Eの次の状態を示す図である。
【図10G】図10Fの次の状態を示す図である。
【図10H】図10Gの次の状態を示す図である。
【図10I】図10Hの次の状態を示す図である。
【発明を実施するための形態】
【0014】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、この発明の第1の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。この基板処理装置は、3つの処理ユニット1,2,3と、未処理基板載置部4と、処理済み基板載置部5と、搬送ロボット6と、制御装置7とを含む。処理ユニット1,2,3は、それぞれ、基板を保持して、その保持した基板に対して処理を行うユニットであり、この実施形態では、互いに異なる処理を基板に対して実行するように構成されている。処理ユニット1,2,3には、障害検知手段の一例である各種のセンサ類1S,2S,3Sが備えられている。これらのセンサ類1S,2S,3Sの出力を監視することによって、処理ユニット1,2,3に生じた障害を検知できる。
【0015】
処理対象の基板は、半導体ウエハであってもよいし、液晶表示装置用基板であってもよいし、その他の基板であってもよい。このような基板に対する処理としては、基板に対して流体(液体または気体)を供給する処理、基板を乾燥する処理、基板に対して紫外線を照射する処理、基板の姿勢を変化(たとえば上下反転)させる処理などを例示できる。
未処理基板載置部4は、たとえば、未処理基板を収容した基板収容器8を載置可能なユニットであってもよい。同様に、処理済み基板載置部5は、たとえば、処理済み基板を収容するための基板収容器9を載置可能なユニットであってもよい。
【0016】
搬送ロボット6は、複数(たとえば2本)のハンド11,12と、これらのハンド11,12を駆動するハンド駆動機構10とを備えている。ハンド11は、それぞれ基板を1枚ずつ保持することができるように構成されている。ハンド駆動機構10は、たとえば、ハンド11,12を水平方向に移動させる水平移動機構と、ハンド11,12を鉛直方向に移動させる昇降機構と、ハンド11,12の向きを鉛直軸線まわりで変化させるための回転機構とを備えていてもよい。これにより、ハンド11,12を水平方向および鉛直方向に移動させ、かつその向きを変えることができるので、処理ユニット1,2,3、未処理基板載置部4および処理済み基板載置部5にアクセスさせ、それらとの間で基板の受け渡しをさせることができる。
【0017】
図2は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。制御装置7は、マイクロコンピュータ等を含み、予め定められたプログラムを実行することによって、処理ユニット1,2,3の動作および搬送ロボット6の動作を制御する。すなわち、制御装置7は、搬送ロボット6を制御するロボット制御手段として機能する。制御装置7には、処理ユニット1,2,3および搬送ロボット6(より具体的にはハンド駆動機構10)が制御対象として接続されている。処理ユニット1,2,3に備えられたセンサ類1S,2S,3Sの信号は、制御装置7に入力されている。制御装置7は、これらのセンサ類1S,2S,3Sの出力信号を監視することによって、いずれかの処理ユニット1,2,3に障害が発生したときに、これを検知する障害検知動作を実行するようにプログラムされている。さらに、制御装置7は、いずれかの処理ユニット1,2,3に障害が発生したときに、予め定める障害制御(後に詳しく説明する。)を実行するようにプログラムされている。
【0018】
図3A〜3Eは、いずれの処理ユニット1,2,3にも障害が生じていないときの動作例を説明するための状態遷移図であり、制御装置7が通常制御に従って各部を制御することによって実現される動作例を示す。図3Aは、処理ユニット1,2,3において、基板W1,W2,W3がそれぞれ処理されていて、搬送ロボット6が、未処理基板載置部4の基板収容器8から次の未処理基板W4を搬出しようとしている状態を示す。この状態から、搬送ロボット6が、一つのハンド11で未処理基板W4を基板収容器8から搬出して保持すると、図3Bの状態となる。次に、図3Cに示すように、搬送ロボット6は、ハンド11,12を処理ユニット1の前まで移動させ、かつ当該処理ユニット1に対向させる。そして、図3Dに示すように、搬送ロボット6は、空いているハンド12で処理済みの基板W1を処理ユニット1から搬出し、ハンド11に保持している未処理基板W4を処理ユニット1に搬入する。すなわち、処理ユニット1に対して、処理済み基板W1と未処理基板W4との入れ換え動作を実行する。次いで、図3Eに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9まで移動させ、かつ当該基板収容器9に対向させる。そして、ハンド12に保持している基板W1を基板収容器9に搬入する。
【0019】
同様の動作が他の処理ユニット2,3に対しても実行される。ただし、基板収容器9に保持されている未処理基板は、それぞれ、予めいずれの処理ユニットによって処理すべきかが指定されており、その指定情報は予め制御装置7に保持されている。制御装置7は、
その指定情報に従って、搬送ロボット6の基板搬送動作を制御するようにプログラムされている。
【0020】
図4A〜4Hは、処理ユニットに障害が生じたときの動作例を説明するための状態遷移図であり、制御装置7が障害制御によって各部を制御することによって実現される動作例を示す。図4Aは、処理ユニット1,2,3において、基板W1,W2,W3がそれぞれ処理されていて、搬送ロボット6が、未処理基板載置部4の基板収容器8から次の未処理基板W4を搬出してハンド11に保持している状態を示す。基板W4は、処理ユニット1によって処理すべき基板であり、他の処理ユニット2,3によってその処理を代替することはできない。搬送ロボット6が未処理基板W4を保持する前に処理ユニット1に障害が発生すれば、制御装置7は、未処理基板W4を基板収容器8から搬出しない。一方、搬送ロボット6が未処理基板W4を保持してしまった後に、処理ユニット1での障害発生が検知されると、図4Aの状態となり、その未処理基板W4は、処理ユニット1〜3のいずれにも搬入することができなくなる。
【0021】
このような場合、搬送ロボット6は、処理ユニット2,3における基板W2,3の処理が終了すると、それらの基板W2,3を搬出する動作を実行する。すなわち、処理ユニット2での処理が終了すると、図4Bに示すように、搬送ロボット6は、ハンド11に未処理基板W4を保持したまま、処理ユニット2の前に移動し、ハンド12を処理ユニット2に向ける。そして、図4Cに示すように、搬送ロボット6は、空いているハンド12を処理ユニット2に搬入させ、処理済みの基板W2を搬出する。さらに、図4Dに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9の前に移動させ、当該基板収容器9に対向させる。その後、搬送ロボット6は、ハンド12を基板収容器9に進入させ、処理済み基板W2を基板収容器9に搬入する。
【0022】
同様に、処理ユニット3での処理が終了すると、図4Eに示すように、搬送ロボット6は、ハンド11に未処理基板W4を保持したまま、処理ユニット3の前に移動し、ハンド12を処理ユニット3に向ける。そして、搬送ロボット6は、空いているハンド12を処理ユニット3に搬入させ、処理済みの基板W3を搬出する。さらに、図4Fに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9の前に移動させ、当該基板収容器9に対向させる。その後、搬送ロボット6は、ハンド12を基板収容器9に進入させ、処理済み基板W3を基板収容器9に搬入する。
【0023】
このようにして、処理ユニット1に障害が発生した場合であっても、搬送ロボット6は搬送動作を継続し、処理ユニット2,3から処理済みの基板W2,W3を搬出して基板収容器9に収納できる。したがって、処理済みの基板W2,W3が処理ユニット2,3内に置き去りにされて長時間放置されることを回避できる。処理済みの基板W2,W3を基板収容器9に収容した後にも、処理ユニット1の障害が解消していなければ、搬送ロボット6は、搬送動作を停止する。
【0024】
処理ユニット1における障害が解消して正常状態に復旧し、処理ユニット1における処理が終了すると、図4Gに示すように、搬送ロボット6は、空いているハンド12を処理ユニット1に進入させて、処理済み基板W1を搬入させ、ハンド11に保持している未処理基板W4を処理ユニット1に搬入する。そして、図4Hに示すように、搬送ロボット6は、ハンド12を処理済み基板載置部5の基板収容器9の前に移動させ、それらを基板収容器9に対向させる。そして、搬送ロボット6は、ハンド12を基板収容器9に進入させて、処理済み基板W1を基板収容器9に搬入する。
【0025】
このように、この実施形態によれば、搬送先の処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該搬送先の処理ユニットに障害が発生すると、その基板を当該一つのハンドで保持したままで、残りのハンドで他のユニットとの間での基板受け渡しが行われる。したがって、搬送先の処理ユニットへの基板搬送を停止しつつ、かつ当該搬送先ユニットへ搬入すべき基板を退避場所に一時退避させたりすることなく、他の処理ユニットに対する基板搬送を継続できる。よって、搬送先のユニットを代替できる他のユニットがなく、かつ基板退避場所がない場合であっても、基板搬送を継続できる。これによって、処理済みの基板が処理ユニットに長時間保持されたままになったりすることがない。
【0026】
また、障害が発生している処理ユニットの当該障害が解消すると、搬送ロボット6は、前記一つのハンドで保持している基板を当該処理ユニットに渡す。これにより、障害から復旧したときに、通常の基板搬送動作を再開できる。
図5は、障害発生時に基板をハンドに保持した状態で搬送ロボット6を動作させることによる一つの効果を説明するための図である。一つのハンドで未処理基板を保持しているときに、その未処理基板の搬入先の処理ユニットで障害が発生した場合に、その未処理基板を基板収容器8に一旦戻すことが考えられる。この場合の動作ステップを図5の左欄(比較例)に示す。また、障害発生時に当該未処理基板を一つのハンドで保持したまま別のハンドで処理済み基板の搬送動作を継続する場合の動作ステップを図5の右欄(実施例)に示す。
【0027】
搬送ロボット6は、現在位置からハンド11,12を基板収容器8まで移動させ、一つのハンド11で、基板収容器8から未処理基板を搬出する(Get)。これにより、ハンド11は未処理基板を保持した状態となる。この状態で、当該未処理基板を搬入すべき処理ユニットに障害が発生したとする。
未処理基板を基板収容器8に一旦戻す動作(図5の左欄)は、基板収容器8へのハンド11の移動、および基板収容器8への未処理基板の搬入(障害回避動作。Put)を含む。その後、搬送ロボット6は、ハンド11,12を、正常な処理ユニットに移動させて、処理済み基板を搬出(Get)させることになる。
【0028】
未処理基板を基板収容器8に戻すことなく、ハンド11に保持したままであれば、ハンド11の基板収容器8への移動、およびその基板収容器8への未処理基板の搬入(障害回避動作。Put)の各動作を省くことができる。したがって、空いているハンド12を正常な処理ユニットまで速やかに移動させ、その処理ユニットから処理済み基板を搬出(Get)できる。そして、ハンド12を基板収容器9へと移動させ、その基板収容器9に処理済み基板を搬入(Put)できる。
【0029】
このように、この実施形態の基板処理装置においては、搬送ロボット6は、障害が発生した処理ユニットに搬入すべき基板を一つのハンドで保持したまま、正常な処理ユニットから処理済み基板を搬出するように動作するので、処理済み基板を速やかに搬出して基板収容器9に収容できる。
図6は、障害発生時に基板をハンドに保持した状態で搬送ロボット6を動作させることによる他の効果を説明するための図である。一つのハンドで未処理基板を保持しているときに、その未処理基板の搬入先の処理ユニットで障害が発生した場合に、その未処理基板を基板収容器8に一旦戻したとする(図5の左欄の動作)。この場合における障害復旧動作ステップを図6の左欄(比較例)に示す。また、障害発生時に当該未処理基板を一つのハンドで保持したまま別のハンドで処理済み基板の搬送動作を継続する場合(図5の右欄の動作)における障害復旧動作ステップを図6の右欄(実施例)に示す。
【0030】
図6の左欄(比較例)の動作では、搬送ロボット6は、現在位置からハンド11,12を基板収容器8まで移動させ、一つのハンド11で、基板収容器8から未処理基板を搬出する(Get)。このとき搬出される未処理基板は、障害復旧した処理ユニットにおいて処理すべき基板である。次に、搬送ロボット6は、ハンド11,12を障害復旧した処理ユニットの前まで移動させ、その処理ユニットに当該未処理基板を搬入させる(Put)。
【0031】
一方、図6の右欄(実施形態)の動作では、搬送ロボット6は、ハンド11に障害復旧した処理ユニットに搬入すべき基板を保持したままなので、基板収容器8までの移動、および基板収容器8からの基板搬出を省くことができる。すなわち、障害復旧した処理ユニットまでハンド11をただちに移動させ、処理ユニットに対して未処理基板を搬入できる(Put)。
【0032】
このように、この実施形態の基板処理装置においては、搬送ロボット6は、障害が発生した処理ユニットに搬入すべき基板を一つのハンドで保持したまま、正常な処理ユニットから処理済み基板を搬出するように動作するので、障害復旧した処理ユニットに対して速やかに未処理基板を搬入できる。
図7は、この発明の第2の実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。この基板処理装置は、インデクサセクション21と、プロセスセクション22とを含む。インデクサセクション21は、未処理基板載置部24と、処理済み基板載置部25と、インデクサロボット26と、反転受渡ユニット27と、受渡ユニット28とを含む。プロセスセクション22は、処理ユニット31,32,33と、主搬送ロボット36とを含む。インデクサセクション21およびプロセスセクション22の各部は、制御装置30によって制御される。また、反転受渡ユニット27(基板姿勢を変化させる処理ユニットの一例)、および処理ユニット31,32,33には、各種のセンサ類27S,31S,32S,33Sが備えられている。これらのセンサ類27S,31S,32S,33Sの出力を監視することによって、ユニット27,31,32,33に生じた障害を検知できる。
【0033】
処理ユニット31〜33は、この実施形態では、互いに異なる処理を基板に対して施すように構成されている。処理ユニット31は、たとえば、基板を保持して、その基板の裏面を処理(たとえば洗浄処理やエッチング処理)する裏面処理ユニットであってもよい。また、処理ユニット32は、基板を保持して、その姿勢を表裏反転する反転ユニットであってもよい。さらに、処理ユニット33は、基板を保持して、その基板の表面を処理(たとえば洗浄処理やエッチング処理)する表面処理ユニットであってもよい。
【0034】
処理対象の基板は、半導体ウエハであってもよいし、液晶表示装置用基板であってもよいし、その他の基板であってもよい。
主搬送ロボット36は、複数(たとえば2本)のハンド41,42と、これらのハンド41,42を駆動するハンド駆動機構40とを備えている。ハンド41は、それぞれ基板を1枚ずつ保持することができるように構成されている。ハンド駆動機構40は、たとえば、ハンド41,42を水平方向に移動させる水平移動機構と、ハンド41,42を鉛直方向に移動させる昇降機構と、ハンド41,42の向きを鉛直軸線まわりで変化させるための回転機構とを備えていてもよい。これにより、ハンド41,42を水平方向および鉛直方向に移動させ、かつその向きを変えることができるので、反転受渡ユニット27、処理ユニット31,32,33、および受渡ユニット28にアクセスさせ、それらとの間で基板の受け渡しをさせることができる。
【0035】
未処理基板載置部24は、たとえば、未処理基板を収容した基板収容器18を載置可能なユニットであってもよい。同様に、処理済み基板載置部25は、たとえば、処理済み基板を収容するための基板収容器19を載置可能なユニットであってもよい。
反転受渡ユニット27は、基板の表裏を反転させる表裏反転機構を備えている。反転受渡ユニット27は、インデクサロボット26によってアクセス可能に構成されており、インデクサロボット26から渡された基板を表裏反転するように構成されている。また、反転受渡ユニット27は、主搬送ロボット36によってアクセス可能に構成されており、表裏反転された基板が主搬送ロボット36によって搬出されるように構成されている。
【0036】
受渡ユニット28は、処理済み基板の置き場所を提供するユニットである。受渡ユニット28は、インデクサロボット26および主搬送ロボット36によってアクセス可能に構成されている。より具体的には、受渡ユニット28は、主搬送ロボット36によって処理済み基板が置かれ、その置かれた処理済み基板がインデクサロボット26によって搬出されるように構成されている。
【0037】
インデクサロボット26は、複数(たとえば2本)のハンド51,52と、これらのハンド51,52を駆動するハンド駆動機構50とを備えている。ハンド51,52は、それぞれ基板を1枚ずつ保持することができるように構成されている。ハンド駆動機構50は、たとえば、ハンド51,52を水平方向に移動させる水平移動機構と、ハンド51,52を鉛直方向に移動させる昇降機構と、ハンド51,52の向きを鉛直軸線まわりで変化させるための回転機構とを備えていてもよい。これにより、ハンド51,52を水平方向および鉛直方向に移動させ、かつその向きを変えることができるので、反転受渡ユニット27、未処理基板載置部24、処理済み基板載置部25および受渡ユニット28にアクセスさせ、それらとの間で基板の受け渡しをさせることができる。
【0038】
図8は、前記基板処理装置の制御に関する電気的構成を説明するためのブロック図である。制御装置30は、マイクロコンピュータ等を含み、予め定められたプログラムを実行することによって、インデクサロボット26、反転受渡ユニット27、処理ユニット31,32,33および主搬送ロボット36の各動作を制御する。したがって、制御装置30には、インデクサロボット26(より具体的にはハンド駆動機構50)、反転受渡ユニット27、処理ユニット31,32,33および主搬送ロボット36(より具体的にはハンド駆動機構40)が制御対象として接続されている。反転受渡ユニット27、および処理ユニット31,32,33に備えられたセンサ類27S,31S,32S,33Sの信号は、制御装置30に入力されている。制御装置30は、これらのセンサ類27S,31S,32S,33Sの出力信号を監視することによって、ユニット27,31,32,33のいずれかに障害が発生したときに、これを検知する障害検知動作を実行するようにプログラムされている。さらに、制御装置30は、ユニット27,31,32,33のいずれかに障害が発生したときに、予め定める障害制御(後に詳しく説明する。)を実行するようにプログラムされている。
【0039】
図9は、反転受渡ユニット27に障害が発生していないときにインデクサロボット26が実行する搬送動作を示す図である。インデクサロボット26は、制御装置30による通常制御に従って、たとえば、次のように動作する。インデクサロボット26は、未処理基板載置部24に載置された基板収容器18に一つのハンド51をアクセスさせ、その基板収容器18から一枚の未処理基板を取り出す。さらに、インデクサロボット26は、未処理基板を保持したハンド51を反転受渡ユニット27まで移動させ、ハンド51からその反転受渡ユニット27に未処理基板を渡す。その後、インデクサロボット26は、受渡ユニット28に一つのハンド52をアクセスさせ、受渡ユニット28から一枚の処理済み基板を受け取る。さらに、インデクサロボット26は、その処理済み基板を保持したハンド52を処理済み基板載置部25に載置された基板収容器19まで移動させ、その基板収容器19に処理済み基板を搬入する。このように、インデクサロボット26は、基板収容器18から反転受渡ユニット27へと未処理基板を搬送し、受渡ユニット28から基板収容器19へと処理済み基板を搬送する動作を繰り返す。
【0040】
主搬送ロボット36は、制御装置30による通常制御に従って、たとえば、次のように動作する。主搬送ロボット36は、一つのハンド41を反転受渡ユニット27にアクセスさせ、表裏反転された未処理基板を受け取る。主搬送ロボット36は、その未処理基板を保持したハンド41を裏面処理ユニット31にアクセスさせ、ハンド41から裏面処理ユニット31にその未処理基板を受け渡す。また、主搬送ロボット36は、裏面処理ユニット31に処理済みの基板があるときには、ハンド42でその処理済み基板を搬出した後、ハンド41上の未処理基板を裏面処理ユニット31に搬入する。さらに、主搬送ロボット36は、ハンド41,42を反転処理ユニット32にアクセスさせ、反転処理後の基板を一つのハンド41で搬出し、裏面処理ユニット31から搬出した裏面処理後の基板を別のハンド42で反転処理ユニット32に搬入する。また、主搬送ロボット36は、ハンド41,42を表面処理ユニット33にアクセスさせ、表面処理後の基板を一つのハンド42で搬出し、反転処理ユニット32から搬出した基板を別のハンド41で表面処理ユニット33に搬入する。そして、主搬送ロボット36は、表面処理ユニット33から搬出した基板を保持したハンド42を受渡ユニット28にアクセスさせ、この受渡ユニット28に受け渡す。
【0041】
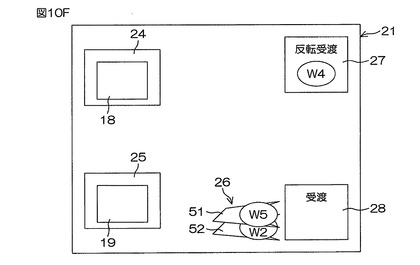
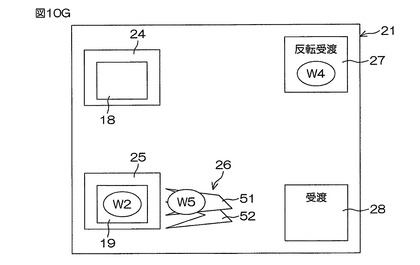
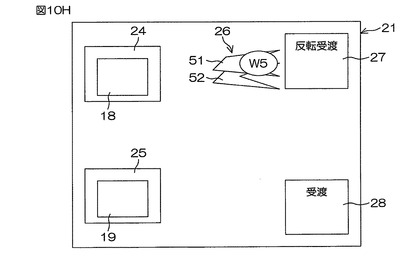
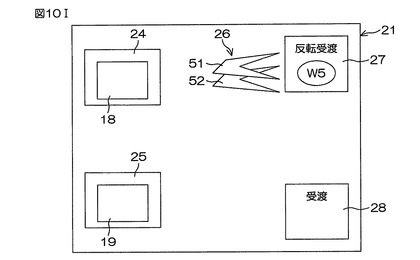
図10A〜10Iは、反転受渡ユニット27に障害が発生したときのインデクサロボット26の動作(障害制御)を説明するための図であり、インデクサセクション21の状態遷移を示す。反転受渡ユニット27における障害の例は、たとえば、基板姿勢反転の途中で反転動作が停止してしまった場合、反転途中で基板が落下してしまった場合などがある。
【0042】
この動作は、制御装置30が障害制御によって各部(とくにインデクサロボット26)を制御することによって実現される。図10Aは、プロセスセクション22によって処理された処理済みの基板W1が受渡ユニット28に保持されており、インデクサロボット26が、未処理基板載置部24の基板収容器18から未処理基板W5を搬出して一つのハンド51に保持しており、さらに反転受渡ユニット27において未処理基板W4の反転処理が行われている状態を示す。インデクサロボット26が未処理基板W5を保持する前に反転受渡ユニット27に障害が発生すれば、制御装置30は、未処理基板W5を基板収容器18から搬出しない。一方、インデクサロボット26が未処理基板W5を保持してしまった後に反転受渡ユニット27に障害が発生すると、図10Aの状態となり、その未処理基板W5を反転受渡ユニット27に搬入することができなくなる。
【0043】
このような場合、インデクサロボット26は、反転受渡ユニット27に対する未処理基板W5の搬入動作を中断する一方で、受渡ユニット28から処理済み基板を搬出する動作を実行する。すなわち、図10Bに示すように、インデクサロボット26は、ハンド51に未処理基板W5を保持したまま、空いているハンド52を受渡ユニット28の前に移動させ、そのハンド52を受渡ユニット28に向ける。そして、図10Cに示すように、インデクサロボット26は、空いているハンド52を受渡ユニット28に搬入させ、処理済みの基板W1を搬出する。さらに、図10Dに示すように、インデクサロボット26は、ハンド52を処理済み基板載置部25の基板収容器19の前に移動させ、当該基板収容器19に対向させる。その後、インデクサロボット26は、ハンド52を基板収容器19に進入させ、処理済み基板W1を基板収容器19に搬入する。同様に、図10Eに示すように、プロセスセクション22が次の処理済み基板W2を受渡ユニット28に払い出すと、図10Fに示すように、インデクサロボット26は、ハンド51に未処理基板W5を保持したまま、受渡ユニット28の前に空いているハンド52を移動させ、そのハンド52を受渡ユニット28に向ける。そして、インデクサロボット26は、空いているハンド52を受渡ユニット28に進入させ、処理済みの基板W2を搬出する。さらに、図10Gに示すように、インデクサロボット26は、処理済み基板W2を保持したハンド52を処理済み基板載置部25の基板収容器19の前に移動させ、当該基板収容器19に対向させる。その後、インデクサロボット26は、ハンド52を基板収容器19に進入させ、処理済み基板W2を基板収容器19に搬入する。
【0044】
このようにして、反転受渡ユニット27に障害が発生した場合であっても、インデクサロボット26は搬送動作を継続し、プロセスセクション22での処理が終了した処理済みの基板W1,W2を搬出して基板収容器19に収納できる。したがって、処理済みの基板W1,W2が受渡ユニット28やプロセスセクション22内に置き去りにされて長時間放置されることを回避できる。プロセスセクション22から全ての処理済みの基板が払い出され、それらの処理済み基板を全て基板収容器19に収容した後にも反転受渡ユニット27の障害が解消していなければ、インデクサロボット26は、搬送動作を停止する。
【0045】
反転受渡ユニット27における障害が解消して正常状態に復旧し、反転受渡ユニット27における基板反転処理が終了し、その反転された未処理基板W4が主搬送ロボット36によって搬出されると(図10H参照)、インデクサロボット26は、ハンド51を反転受渡ユニット27に進入させて、未処理基板W5を反転受渡ユニット27に搬入する(図10I参照)。こうして、インデクサロボット26の通常の動作が再開される。
【0046】
このように、この実施形態によれば、インデクサロボット26は、反転受渡ユニット27に搬入すべき基板を一つのハンドで保持しているときに反転受渡ユニット27に障害が発生すると、その基板を当該一つのハンドで保持したままで、残りのハンドで受渡ユニット28から基板収容器19へと処理済み基板を搬送する。したがって、障害が発生した反転受渡ユニット27への基板搬送を停止しつつ、かつ反転受渡ユニット27へ搬入すべき基板を退避場所に一時退避させたりすることなく、受渡ユニット28からの未処理基板搬出動作を継続できる。これによって、処理済みの基板が受渡ユニット28やプロセスセクション22に長時間保持されたままになったりすることがない。
【0047】
また、反転受渡ユニット27が障害から復旧すると、インデクサロボット26は、前記一つのハンドで保持している基板を速やかに反転受渡ユニット27に渡す。これにより、障害から復旧したときに、通常の基板搬送動作を再開できる。
反転受渡ユニット27に障害が発生したときに、未処理基板を、一旦、基板収容器18に戻すことが考えられる(障害回避動作)。しかし、このような障害回避動作を行わず、未処理基板を一つのハンドで保持したままの方が、基板搬送に要する時間を短縮できる。このことは、前述の第1の実施形態において図5および図6を参照して説明した考察と同様の考察を行うことによって裏付けられる。
【0048】
プロセスセクション22の処理ユニット31〜33のいずれかにおいて障害が発生したときの動作は、前述の第1の実施形態の場合と同様である。すなわち、主搬送ロボット36からインデクサセクション21を見た場合に、反転受渡ユニット27は「未処理基板載置部」であり、受渡ユニット28は「処理済み基板載置部」である。よって、障害発生時には、制御装置30は、主搬送ロボット36を第1の実施形態における搬送ロボット6と同様に動作させればよい。
【0049】
以上、この発明の実施形態について説明してきたが、この発明は、さらに他の形態で実施することもでき、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0050】
1,2,3 処理ユニット
1S,2S,3S センサ類
4 未処理基板載置部
5 処理済み基板載置部
6 搬送ロボット
7 制御装置
8 基板収容器
9 基板収容器
11,12 ハンド
18 基板収容器
19 基板収容器
21 インデクサセクション
22 プロセスセクション
24 未処理基板載置部
25 処理済み基板載置部
26 インデクサロボット
27 反転受渡ユニット
27S,31S,32S,33S センサ類
28 受渡ユニット
30 制御装置
31,32,33 処理ユニット
36 主搬送ロボット
40 ハンド駆動機構
41,42 ハンド
50 ハンド駆動機構
51,52 ハンド
52 ハンド
W1〜W5 基板
【特許請求の範囲】
【請求項1】
基板を保持することができる複数のユニットと、
前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンドを有する搬送ロボットと、
前記複数のユニットのいずれかに発生した障害を検知する障害検知手段と、
前記障害検知手段によって障害発生が検知されているユニットに基板を渡さないように前記搬送ロボットを制御するロボット制御手段とを含み、
前記ロボット制御手段は、一つのユニットに搬入すべき基板を一つのハンドで保持しているときに当該ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするように前記搬送ロボットを制御する障害制御を実行するようにプログラムされている、基板処理装置。
【請求項2】
前記複数のユニットが、基板に対して処理を行う処理ユニットを含む、請求項1に記載の基板処理装置。
【請求項3】
前記複数の処理ユニットが、異なる処理を実行するように構成されている、請求項2に記載の基板処理装置。
【請求項4】
前記ロボット制御手段は、前記障害が発生している一つのユニットの当該障害が解消したとき、前記一つのハンドで保持している基板を当該ユニットに渡すように前記搬送ロボットを制御するようにプログラムされている、請求項1〜3のいずれか一項に記載の基板処理装置。
【請求項5】
基板を保持することができる複数のユニットと、前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンドを有する搬送ロボットとを含む基板処理装置における基板処理方法であって、
前記複数のユニットのいずれかに発生した障害を検知する障害検知ステップと、
前記搬送ロボットが一つのユニットに搬入すべき基板を一つのハンドで保持しているときに前記障害検知ステップによって当該ユニットに発生した障害が検知された場合に、前記搬送ロボットが当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするステップとを含む、基板処理方法。
【請求項1】
基板を保持することができる複数のユニットと、
前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンドを有する搬送ロボットと、
前記複数のユニットのいずれかに発生した障害を検知する障害検知手段と、
前記障害検知手段によって障害発生が検知されているユニットに基板を渡さないように前記搬送ロボットを制御するロボット制御手段とを含み、
前記ロボット制御手段は、一つのユニットに搬入すべき基板を一つのハンドで保持しているときに当該ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするように前記搬送ロボットを制御する障害制御を実行するようにプログラムされている、基板処理装置。
【請求項2】
前記複数のユニットが、基板に対して処理を行う処理ユニットを含む、請求項1に記載の基板処理装置。
【請求項3】
前記複数の処理ユニットが、異なる処理を実行するように構成されている、請求項2に記載の基板処理装置。
【請求項4】
前記ロボット制御手段は、前記障害が発生している一つのユニットの当該障害が解消したとき、前記一つのハンドで保持している基板を当該ユニットに渡すように前記搬送ロボットを制御するようにプログラムされている、請求項1〜3のいずれか一項に記載の基板処理装置。
【請求項5】
基板を保持することができる複数のユニットと、前記複数のユニットとの間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンドを有する搬送ロボットとを含む基板処理装置における基板処理方法であって、
前記複数のユニットのいずれかに発生した障害を検知する障害検知ステップと、
前記搬送ロボットが一つのユニットに搬入すべき基板を一つのハンドで保持しているときに前記障害検知ステップによって当該ユニットに発生した障害が検知された場合に、前記搬送ロボットが当該一つのハンドで当該基板を保持したまま当該ユニットへの基板の搬入を停止し、残りのハンドで他のユニットとの間で基板を受け渡しするステップとを含む、基板処理方法。
【図1】


【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図4G】
【図4H】
【図5】
【図6】

【図7】
【図8】
【図9】

【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図10H】
【図10I】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図4G】
【図4H】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図10H】
【図10I】
【公開番号】特開2012−199328(P2012−199328A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−61480(P2011−61480)
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
[ Back to top ]