
基板処理装置および基板処理方法
【課題】基板の処理に使用される処理液の消費量を低減すること。
【解決手段】基板処理装置は、処理液を吸収可能で弾性変形可能なスポンジ41と、スポンジ41に処理液を供給する貯留槽40と、基板Wを保持する基板搬送ロボット21とを含む。基板搬送ロボット21は、スポンジ41と基板Wとを相対移動させてスポンジ41と基板Wの下面とを接触させることにより、スポンジ41に吸収されている処理液を基板Wの下面に供給させる。
【解決手段】基板処理装置は、処理液を吸収可能で弾性変形可能なスポンジ41と、スポンジ41に処理液を供給する貯留槽40と、基板Wを保持する基板搬送ロボット21とを含む。基板搬送ロボット21は、スポンジ41と基板Wとを相対移動させてスポンジ41と基板Wの下面とを接触させることにより、スポンジ41に吸収されている処理液を基板Wの下面に供給させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、基板を処理する基板処理装置および基板処理方法に関する。処理対象となる基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、セラミック基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
半導体装置や液晶表示装置などの製造工程では、半導体ウエハや液晶表示装置用ガラス基板などの基板を処理する基板処理装置が用いられる。
複数枚の基板を一括して処理するバッチ式の基板処理装置は、たとえば、薬液が貯留された薬液処理槽と、リンス液が貯留されたリンス処理槽と、これらの処理槽の間で複数枚の基板を一括して搬送する搬送ロボットとを備えている(例えば特許文献1参照)。基板が処理されるときには、複数枚の基板が搬送ロボットによって薬液処理槽およびリンス処理槽に順次搬送される。
【0003】
一方、基板を一枚ずつ処理する枚葉式の基板処理装置は、たとえば、一枚の基板を水平に保持して回転させるスピンチャックと、スピンチャックに保持された基板の上面に向けて処理液を吐出する処理液ノズルとを備えている(例えば特許文献2参照)。基板が処理されるときには、回転状態の基板に向けて処理液ノズルから薬液およびリンス液が順次吐出される。処理液ノズルから吐出された薬液およびリンス液は、基板に供給された後、基板の周囲に飛散する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−190529号公報
【特許文献2】特開2010−177371号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
バッチ式の基板処理装置では、処理される基板の枚数に拘わらず処理槽内に一定量の処理液を貯留する必要がある。したがって、処理液の消費量を低減することが困難である。一方、枚葉式の基板処理装置では、基板に供給された処理液が基板から排出されるから、基板に処理液を供給し続ける必要がある。そのため、処理液の消費量を低減することが困難である。
【0006】
そこで、この発明の目的は、処理液の消費量を低減することができる基板処理装置および基板処理方法を提供することである。
【課題を解決するための手段】
【0007】
前記目的を達成するための請求項1記載の発明は、処理液を吸収可能で弾性変形可能なスポンジ(41、49)と、前記スポンジに処理液を供給する処理液供給手段(40、48)と、基板(W)を保持する基板保持手段(21、260)と、前記スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させて両者を接触させることにより、前記スポンジに吸収されている処理液を前記基板の主面に供給させる接触手段(21、221)とを含む、基板処理装置(1、201)である。基板の主面は、デバイス形成面である表面であってもよいし、表面とは反対側の裏面であってもよい。なお、この項において、括弧内の英数字は、後述の実施形態における対応構成要素の参照符号を表すものであるが、これらの参照符号により特許請求の範囲を限定する趣旨ではない。
【0008】
この構成によれば、接触手段が、処理液供給手段によって処理液が供給されたスポンジと基板保持手段に保持されている基板とを相対移動させて、スポンジと基板の主面とを接触させる。これにより、スポンジが弾性変形して、スポンジに吸収されている処理液が染み出る。そのため、薄い液膜(処理液の液膜)が形成され、この液膜によって基板の主面(主面の一部であってもよいし、全部であってもよい)が覆われる。したがって、基板においてスポンジが接触した部分に処理液を確実に供給することできる。さらに、スポンジと基板との接触により処理液が基板に一瞬で供給されるから、処理液の供給に要する時間を短縮することができる。しかも、基板の主面に供給された処理液は、基板の主面におけるスポンジとの接触部分を覆う必要最低限の量であるから、処理液の消費量を低減することができる。
【0009】
請求項2記載の発明は、前記スポンジは、基板の主面以上の大きさの第1基板接触面(41a,41b)を有する全面処理スポンジ(41)と、基板の主面よりも小さい第2基板接触面(49a、49b)を有する部分処理スポンジ(49)とを含み、前記基板処理装置は、前記接触手段を制御することにより、前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジと前記基板保持手段に保持されている基板の主面とを接触させる接触制御手段(4)をさらに含む、請求項1記載の基板処理装置である。
【0010】
この構成によれば、接触手段が接触制御手段によって制御されることにより、全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジと基板とが接触する。全面処理スポンジは、基板の主面以上の大きさの第1基板接触面を有しているから、接触制御手段が全面処理スポンジと基板とを接触させることにより、基板の主面の全域に処理液を一瞬で供給することができる。一方、部分処理スポンジは、基板の主面よりも小さい第2基板接触面を有しているから、接触制御手段が部分処理スポンジと基板とを接触させることにより、基板の主面の一部に処理液を供給することができる。したがって、処理液の供給が必要でない部分に処理液が供給されることを抑制または防止することができる。
【0011】
基板の主面において部分処理スポンジが接触する部分は、予め定められた部分であってもよいし、基板ごとに設定される部分であってもよい。
基板の主面において部分処理スポンジが接触する部分が基板ごとに設定される場合、請求項3記載の発明のように、前記基板処理装置は、基板の汚染状態を測定する汚染状態測定手段(8)と、前記汚染状態測定手段の測定結果に基づいて前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジを選択するスポンジ選択手段(4)と、前記スポンジ選択手段によって前記部分処理スポンジが選択されたときに、基板の主面において前記部分処理スポンジが接触する部分を、前記汚染状態測定手段の測定結果に基づいて基板ごとに設定する接触位置設定手段(4)とをさらに含み、前記接触制御手段は、前記接触手段を制御することにより、前記接触位置設定手段により設定された部分と前記部分処理スポンジとが接触するように、前記部分処理スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させてもよい。
【0012】
この構成によれば、汚染状態測定手段によって基板の汚染状態が測定される。スポンジ選択手段は、汚染状態測定手段の測定結果に基づいて全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジを選択する。接触位置設定手段は、スポンジ選択手段が部分処理スポンジを選択したときに、基板の主面において部分処理スポンジが接触する部分を汚染状態測定手段の測定結果に基づいて基板ごとに設定する。そして、接触制御手段は、接触手段を制御することにより、接触位置設定手段により設定された部分と部分処理スポンジとを接触させる。したがって、基板の汚染されている部分に部分処理スポンジを確実に接触させて、この部分に処理液を確実に供給することができる。これにより、基板の清浄度を向上させることができる。
【0013】
請求項4記載の発明は、前記スポンジを洗浄するスポンジ洗浄手段(56)をさらに含む、請求項1〜3のいずれか一項に記載の基板処理装置である。
この構成によれば、スポンジ洗浄手段によってスポンジが洗浄される。これにより、スポンジから異物が除去される。そのため、スポンジと基板とが接触したときに、スポンジから基板に異物が移動して、基板が汚染されることを抑制または防止することができる。
【0014】
請求項5記載の発明は、前記スポンジ洗浄手段は、前記スポンジが浸漬される処理液を貯留する洗浄槽(40、48)と、前記洗浄槽に貯留されている処理液に前記スポンジが浸漬されている状態で前記スポンジを保持するスポンジ保持手段(42、50、225)と、前記スポンジ保持手段に保持されている前記スポンジを圧縮させる圧縮手段(21、43)とを含む、請求項4記載の基板処理装置である。
【0015】
この構成によれば、圧縮手段は、スポンジ保持手段に保持されているスポンジを圧縮させることができる。したがって、スポンジは、洗浄槽に貯留されている処理液に浸漬されている状態で圧縮される。圧縮手段が、その後にスポンジの圧縮を解除すると、スポンジはその弾性によって元の形状に膨張して復元する。これにより、スポンジは、その吸収力によって処理液を吸収する。スポンジが圧縮されると、スポンジの表面に付着している異物や、スポンジの内部に保持されている異物が、スポンジに吸収されている処理液と共にスポンジから排出される。これにより、スポンジから異物が除去される。
【0016】
基板処理装置は、圧縮手段を繰り返し作動させてスポンジの圧縮/膨張を繰り返してもよい。すなわち、圧縮手段の作動が繰り返し行われることにより、スポンジの圧縮/膨張が繰り返し行われてもよい。この場合、スポンジによる処理液の吸収および排出が繰り返し行われ、スポンジから異物が確実に除去される。したがって、スポンジと基板とが接触したときに、スポンジから基板に異物が移動して、基板が汚染されることを抑制または防止することができる。
【0017】
請求項6記載の発明は、前記スポンジ洗浄手段は、前記洗浄槽に貯留されている処理液を循環させる循環配管(44)と、前記循環配管を流れる処理液から異物を除去するフィルタ(46)とをさらに含む、請求項5記載の基板処理装置である。
この構成によれば、洗浄槽に貯留されている処理液が、循環配管に排出され、循環配管を通って再び洗浄槽に戻る。これにより、洗浄槽に貯留されている処理液が循環する。循環配管を流れる処理液に含まれる異物は、フィルタによって除去される。したがって、洗浄槽に貯留されている処理液に含まれる異物が、スポンジに付着することを抑制または防止することができる。これにより、スポンジと基板とが接触したときに、スポンジから基板に異物が移動して、基板が汚染されることを抑制または防止することができる。
【0018】
請求項7記載の発明は、前記スポンジと前記基板保持手段に保持されている基板の主面とが接触している状態で前記スポンジと前記基板とを相対移動させて、前記スポンジと前記基板とを摺動させる摺動手段(21、221)をさらに含む、請求項1〜6のいずれか一項に記載の基板処理装置である。
この構成によれば、摺動手段が、スポンジと基板とを摺動させる。これにより、基板の主面に付着している異物がスポンジによって擦り取られる。これにより、基板の清浄度を向上させることができる。
【0019】
スポンジと基板との摺動は、スポンジと基板とが接触するときに毎回行われてもよいし、基板の汚染状態に応じて行われてもよい。具体的には、請求項8記載の発明のように、前記基板処理装置は、基板の汚染状態を測定する汚染状態測定手段(8)と、前記摺動手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記スポンジと前記基板との摺動を制御する摺動制御手段(4)とをさらに含んでいてもよい。
【0020】
この構成によれば、摺動制御手段が、汚染状態測定手段の測定結果に基づいてスポンジと基板との摺動を制御する。すなわち、たとえば基板の汚染度が高い場合、摺動制御手段は、摺動手段によってスポンジと基板とを摺動させる。一方、たとえば基板の汚染度が低い場合、摺動制御手段は、スポンジと基板とを摺動させない。このように、基板の汚染状態に応じてスポンジと基板との摺動が制御されるから、基板の清浄度を安定させることができる。
【0021】
請求項9記載の発明は、基板の汚染状態を測定する汚染状態測定手段(8)と、前記基板保持手段に保持されている基板の主面に対する前記スポンジの押し付け量を変更する押し付け量変更手段(21、221)と、前記押し付け量変更手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記押し付け量を変更する押し付け量制御手段(4)とをさらに含む、請求項1〜8のいずれか一項に記載の基板処理装置である。
【0022】
この構成によれば、押し付け量制御手段が、汚染状態測定手段の測定結果に基づいて基板の主面に対するスポンジの押し付け量を制御する。すなわち、たとえば基板の汚染度が高い場合、押し付け量制御手段は、押し付け量変更手段を制御し、基板の汚染度が低い場合に比べて押し付け量を増加させる。これにより、スポンジから染み出る処理液の量が増加し、基板に供給される処理液の量が増加する。このように、基板の汚染状態に応じて基板の主面に対する処理液の供給量が制御されるから、基板の清浄度を安定させることができる。
【0023】
請求項10記載の発明は、基板の温度を変化させる温度変更手段(47a、47b、247)をさらに含む、請求項1〜9のいずれか一項に記載の基板処理装置である。
この構成によれば、温度変更手段が、基板を加熱および/または冷却することにより、基板の温度を変化させる。これにより、基板が膨張および/または収縮する。また、基板の温度が変化することにより、基板に付着している異物の温度も変化し、この異物が膨張および/または収縮する。したがって、基板および異物の両方が膨張および/または収縮する。基板の膨張率と異物の膨張率が異なる場合、基板および異物が膨張および/または収縮することにより、基板と異物との接触状態が変化し、異物が基板から取れ易くなる。したがって、異物の除去率を向上させることができる。
【0024】
請求項11記載の発明は、前記温度変更手段は、基板を加熱する加熱手段(47a)と、基板を冷却する冷却手段(47b)と、前記加熱手段および冷却手段によって基板の加熱および冷却を交互に実行させる温度制御手段(4)とを含む、請求項10記載の基板処理装置である。
この構成によれば、温度制御手段が加熱手段および冷却手段を制御することにより、基板の加熱および冷却が交互に実行される。したがって、基板の膨張率と異物の膨張率が異なる場合には、基板と異物との接触状態が変化し、異物が基板から取れ易くなる。特に、基板の加熱および冷却が交互に実行されるから、加熱だけまたは冷却だけが実行される場合に比べて、基板の温度差が大きくなる。そのため、異物が基板から一層取れ易くなる。これにより、異物の除去率を向上させることができる。
【0025】
請求項12記載の発明は、基板にリンス液を供給するリンス液供給手段(51)と、基板を乾燥させる乾燥手段(21)と、前記スポンジから基板への処理液の供給が行われる供給ステーション(13、15)と、前記リンス液供給手段から基板へのリンス液の供給および前記乾燥手段による基板の乾燥が行われるリンス・乾燥ステーション(12)と、基板の搬入および搬出が行われる搬入・搬出ステーション(11)とをさらに含み、基板が、前記搬入・搬出ステーションから前記供給ステーションに移動し、その後、前記供給ステーションから前記リンス・乾燥ステーションを通って前記搬入・搬出ステーションに移動するように、前記基板を搬送する搬送手段(21)とをさらに含む、請求項1〜11のいずれか一項に記載の基板処理装置である。
【0026】
この構成によれば、搬送手段が基板を搬送する。搬送手段によって搬送される基板は、搬入・搬出ステーションから供給ステーションに移動する。その後、この基板は、供給ステーションからリンス・乾燥ステーションを通って搬入・搬出ステーションに移動する。搬送手段によって搬送される基板は、供給ステーションでスポンジから供給される処理液によって処理される。また、搬送手段によって搬送される基板は、リンス・乾燥ステーションでリンス液供給手段から供給されるリンス液によって処理される。すなわち、基板に付着している処理液がリンス液によって洗い流される。その後、基板に付着しているリンス液が、リンス・乾燥ステーションで乾燥手段によって除去され、基板が乾燥する。このように、搬送手段が基板を搬送することにより、一連の処理が基板に施される。
【0027】
請求項13記載の発明は、前記基板処理装置は、基板が搬送される搬送路(20)をさらに含み、前記搬入・搬出ステーション、前記リンス・乾燥ステーション、および前記供給ステーションは、この順番で前記搬送路に沿って配置されており、前記搬送手段は、前記搬送路に沿って基板を搬送する、請求項12記載の基板処理装置である。
この構成によれば、搬入・搬出ステーション、リンス・乾燥ステーション、および供給ステーションが、この順番で搬送路に沿って配置されている。搬送手段は、搬送路に沿って基板を搬送する。したがって、搬送手段によって搬送される基板は、搬入・搬出ステーションからリンス・乾燥ステーションを通って供給ステーションに移動する。その後、この基板は、供給ステーションからリンス・乾燥ステーションを通って搬入・搬出ステーションに移動する。すなわち、リンス・乾燥ステーションでリンス処理および乾燥処理が行われた基板は、供給ステーションを通過せずに、リンス・乾燥ステーションから搬入・搬出ステーションに移動する。したがって、供給ステーションに漂う処理液の雰囲気などが基板に付着することを抑制または防止することができる。これにより、基板の清浄度を向上させることができる。
【0028】
請求項14記載の発明は、処理液を吸収可能で弾性変形可能なスポンジ(41、49)に処理液供給手段(40、48)によって処理液を供給し、前記スポンジに処理液を吸収させるステップと、処理液を吸収した前記スポンジと基板保持手段(21、260)に保持されている基板の主面とを接触手段(21、221)によって相対移動させて接触させ、前記スポンジに吸収されている処理液を前記基板の主面に供給させるステップとを含む、基板処理方法である。この構成によれば、請求項1の発明に関して述べた効果と同様な効果を奏することができる。
【図面の簡単な説明】
【0029】
【図1】本発明の第1実施形態に係る基板処理装置のレイアウトを示す模式図である。
【図2】本発明の第1実施形態に係る全面処理ラインの概略構成を示す模式図である。
【図3】本発明の第1実施形態に係る全面処理ラインの概略構成を示す模式図である。
【図4】本発明の第1実施形態に係る基板搬送ロボットの概略構成を示す模式図である。
【図5】本発明の第1実施形態に係る搬入・搬出ステーションの概略構成を示す平面図である。
【図6】本発明の第1実施形態に係る搬入・搬出ステーションの概略構成を示す側面図である。
【図7】本発明の第1実施形態に係る第1薬液供給ステーションの概略構成を示す模式図である。
【図8】本発明の第1実施形態に係る第2薬液供給ステーションの概略構成を示す模式図である。
【図9】本発明の第1実施形態に係るリンス・乾燥ステーションの概略構成を示す模式図である。
【図10】本発明の第1実施形態に係るスポンジ洗浄装置の概略構成を示す模式図である。
【図11】全面処理スポンジが薬液中で圧縮されている状態を示す模式図である。
【図12】全面処理スポンジが空気中で圧縮されている状態を示す模式図である。
【図13】基板の処理の一例について説明するためのフローチャートである。
【図14】本発明の第2実施形態に係る基板処理装置のレイアウトを示す模式図である。
【図15】本発明の第2実施形態に係る全面処理ラインの概略構成を説明するための模式図である。
【図16】本発明の第2実施形態に係る部分処理ラインの概略構成を説明するための模式図である。
【図17】全面処理スポンジが薬液中で圧縮されている状態を示す模式図である。
【図18】全面処理スポンジが空気中で圧縮されている状態を示す模式図である。
【発明を実施するための形態】
【0030】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、本発明の第1実施形態に係る基板処理装置1のレイアウトを示す模式図である。
基板処理装置1は、薬液やリンス液などの処理液によって半導体ウエハ等の円板状の基板Wを一枚ずつ処理する枚葉式の基板処理装置である。基板処理装置1は、基板Wが搬入されるインデクサブロック2と、インデクサブロック2に搬入された基板Wを処理する処理ブロック3と、基板処理装置1に備えられた装置や機器を制御する制御装置4(接触制御手段、スポンジ選択手段、接触位置設定手段、摺動制御手段、押し付け量制御手段、温度制御手段)とを備えている。
【0031】
インデクサブロック2は、複数のキャリアCを保持するキャリア保持部5と、基板Wを搬送するインデクサロボット6と、インデクサロボット6を移動させるIR移動機構7と、基板Wの汚染状態を測定する測定ユニット8(汚染状態測定手段)とを含む。複数のキャリアCは、水平なキャリア配列方向D1に沿って配列された状態でキャリア保持部5に保持されている。各キャリアC内には、デバイス形成面である基板Wの表面が上に向けられた状態で、複数枚の基板Wが水平な姿勢で上下に間隔を空けて保持されている。IR移動機構7は、キャリア配列方向D1にインデクサロボット6を移動させる。インデクサロボット6は、キャリア保持部5に保持されたキャリアCに基板Wを搬入する搬入動作、および基板WをキャリアCから搬出する搬出動作を行う。さらに、インデクサロボット6は、インデクサブロック2内で基板Wを搬送すると共に、インデクサブロック2と処理ブロック203との間で基板Wを搬送する。
【0032】
測定ユニット8は、基板Wに付着しているパーティクルなどの異物の数および基板Wに対する各異物の位置を測定するユニットである。測定ユニット8は、たとえば、パーティクルカウンタ、全反射蛍光X線分析装置(TRXRF)、エネルギー分散型X線分析装置(EDX:Energy Dispersive X−ray spectrometer)、走査型電子顕微鏡(SEM:Scanning Electron Microscope)、および画像認識異物検査装置の少なくとも一つを含む。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて基板Wを処理ブロック3に処理させる。
【0033】
処理ブロック3は、基板Wを一枚ずつ処理する複数(たとえば、4つ)の処理ライン9、10を含む。各処理ライン9、10は、キャリア配列方向D1に直交する水平なライン延伸方向D2に延びている。4つの処理ライン9、10は、基板Wの下面の全域に薬液を供給する2つの全面処理ライン9と、基板Wの下面の一部に薬液を供給する2つの部分処理ライン10とを含む。2つの全面処理ライン9は、上下に重ねられており、2つの部分処理ライン10は、上下に重ねられている。上段の全面処理ライン9と上段の部分処理ライン10とは、同じ高さに配置されており、水平方向に対向している。同様に、下段の全面処理ライン9と下段の部分処理ライン10とは、同じ高さに配置されており、水平方向に対向している。
【0034】
全面処理ライン9は、基板Wの搬入および搬出が行われる搬入・搬出ステーション11と、リンス処理および乾燥処理を行うリンス・乾燥ステーション12と、基板Wの下面の全域に薬液を供給する第1薬液供給ステーション13(供給ステーション)と、後述するスポンジ洗浄ロボット57が待機しているスポンジ洗浄ロボット待機ステーション14とを含む。これらのステーション11、12、13、14は、インデクサブロック2側から搬入・搬出ステーション11、リンス・乾燥ステーション12、第1薬液供給ステーション13、スポンジ洗浄ロボット待機ステーション14の順番でライン延伸方向D2に配列されている。
【0035】
同様に、部分処理ライン10は、搬入・搬出ステーション11と、リンス・乾燥ステーション12と、基板Wの下面の一部に薬液を供給する第2薬液供給ステーション15(供給ステーション)と、スポンジ洗浄ロボット待機ステーション14とを含む。すなわち、部分処理ライン10は、第1薬液供給ステーション13を除き、全面処理ライン9と同様の構成を有している。これらのステーション11、12、15、14は、インデクサブロック2側から搬入・搬出ステーション11、リンス・乾燥ステーション12、第2薬液供給ステーション15、スポンジ洗浄ロボット待機ステーション14の順番でライン延伸方向D2に配列されている。
【0036】
第1薬液供給ステーション13は、基板Wの下面の全域に薬液を供給すると共に、基板Wを加熱する第1加熱ステーション16と、基板Wの下面の全域に薬液を供給すると共に、基板Wを冷却する第1冷却ステーション17とを含む。第1加熱ステーション16および第1冷却ステーション17は、ライン延伸方向D2に配列されている。第1加熱ステーション16は、第1冷却ステーション17よりもリンス・乾燥ステーション12側に配置されている。第1加熱ステーション16と第1冷却ステーション17との順番は逆であってもよい。すなわち、第1冷却ステーション17が、第1加熱ステーション16よりもリンス・乾燥ステーション12側に配置されていてもよい。
【0037】
同様に、第2薬液供給ステーション15は、基板Wの下面の一部に薬液を供給すると共に、基板Wを加熱する第2加熱ステーション18と、基板Wの下面の一部に薬液を供給すると共に、基板Wを冷却する第2冷却ステーション19とを含む。第2加熱ステーション18および第2冷却ステーション19は、ライン延伸方向D2に配列されている。第2加熱ステーション18は、第2冷却ステーション19よりもリンス・乾燥ステーション12側に配置されている。第2加熱ステーション18と第2冷却ステーション19との順番は逆であってもよい。すなわち、第2冷却ステーション19が、第2加熱ステーション18よりもリンス・乾燥ステーション12側に配置されていてもよい。
【0038】
制御装置4は、インデクサロボット6によって各処理ライン9、10の搬入・搬出ステーション11に未処理の基板Wを搬入させる。そして、搬入・搬出ステーション11に搬入された基板Wは、同じ処理ライン9、10内で搬送され、処理される。その後、制御装置4は、各処理ライン9、10で処理された基板Wをインデクサロボット6によって搬入・搬出ステーション11から搬出させる。
【0039】
図2および図3は、本発明の第1実施形態に係る全面処理ライン9の概略構成を示す模式図である。また、図4は、本発明の第1実施形態に係る基板搬送ロボット21の概略構成を示す模式図である。以下では、全面処理ライン9の構成について説明する。部分処理ライン10は、全面処理ライン9と同様の構成を備えているので、その説明を省略する。
図2に示すように、全面処理ライン9は、基板Wが搬送される搬送路20と、搬送路20に沿って基板Wを搬送する基板搬送ロボット21(基板保持手段、接触手段、圧縮手段、摺動手段、押し付け量変更手段、乾燥手段、搬送手段)と、基板搬送ロボット21を収容する密閉された処理ケース22とを含む。搬送路20は、ライン延伸方向D2に延びている。搬入・搬出ステーション11、リンス・乾燥ステーション12、第1薬液供給ステーション13、およびスポンジ洗浄ロボット待機ステーション14は、搬送路20に沿って配置されている。搬入・搬出ステーション11は、処理ケース22の外に設けられており、リンス・乾燥ステーション12、第1薬液供給ステーション13、およびスポンジ洗浄ロボット待機ステーション14は、処理ケース22内に設けられている。処理ケース22は、開口部23aを有する箱形の本体23と、開口部23aを開閉するシャッター24と、開口部23aが開かれる開位置と開口部23aが閉じられる閉位置との間でシャッター24を移動させるシャッター移動機構(図示せず)とを含む。
【0040】
図2および図3に示すように、基板搬送ロボット21は、基板Wを保持する基板保持部25と、鉛直方向に伸縮可能な鉛直伸縮部26と、ライン延伸方向D2に伸縮可能な水平伸縮部27と、鉛直伸縮部26をライン延伸方向D2に移動させる水平移動部28とを含む。基板保持部25は、鉛直伸縮部26の下方で鉛直伸縮部26に支持されており、鉛直伸縮部26は、水平伸縮部27の下方で水平伸縮部27に支持されている。水平伸縮部27は、水平移動部28の下方で水平移動部28に支持されている。水平移動部28は、処理ケース22内でライン延伸方向D2に延びている。水平移動部28は、基板保持部25、鉛直伸縮部26、および水平伸縮部27を処理ケース22内で一体的に移動させる。
【0041】
さらに、図4に示すように、基板搬送ロボット21は、吸引力を発生する吸引機構29と、鉛直伸縮部26を鉛直方向に伸縮させる昇降機構30と、基板保持部25に保持されている基板Wの中心を通り鉛直方向に延びる基板回転軸線L1まわりに基板保持部25を回転させる回転機構31とを含む。吸引機構29の吸引力は、基板保持部25に伝達される。基板保持部25は、吸引機構29からの吸引力によって基板Wの上面(裏面)を吸引することにより、基板保持部25の下方で基板Wを水平に保持する。基板保持部25が基板Wを保持している状態で昇降機構30が鉛直伸縮部26を伸縮させると、基板Wが水平な姿勢で昇降する。さらに、基板保持部25が基板Wを保持している状態で回転機構31が基板保持部25を回転させると、基板回転軸線L1まわりに基板Wが回転する。
【0042】
基板保持部25に保持されている基板Wは、水平移動部28が、基板保持部25、鉛直伸縮部26、および水平伸縮部27を移動させることにより処理ケース22内でライン延伸方向D2に搬送される。すなわち、基板保持部25に保持されている基板Wは、リンス・乾燥ステーション12と薬液供給ステーション13、15との間で搬送される。また、基板保持部25に保持されている基板Wは、水平伸縮部27の伸縮によって処理ケース22の中と処理ケース22の外との間で搬送される。
【0043】
具体的には、図2に示すように、搬入・搬出ステーション11は、基板Wを支持する基板支持部材32を含む。基板支持部材32は、搬送路20よりも下方で基板Wを支持する。インデクサロボット6は、基板支持部材32に基板Wを搬入し、基板支持部材32から基板Wを搬出する。図3に示すように、処理ケース22の外から中に基板Wが搬送される場合には、基板保持部25、鉛直伸縮部26、および水平伸縮部27が処理ケース22内において開口部23aの近傍に配置されており、開口部23aが開かれている状態で、水平伸縮部27がライン延伸方向D2に伸長する。これにより、基板保持部25および鉛直伸縮部26が、開口部23aを通って処理ケース22の外に移動する。そして、基板支持部材32に支持されている基板Wの上方に基板保持部25が位置するように、基板保持部25および鉛直伸縮部26が処理ケース22の外に配置される。この状態で、基板保持部25が基板Wの上面に接する位置まで鉛直伸縮部26が伸長する。これにより、基板支持部材32に支持されている基板Wが基板保持部25に保持される。基板Wが基板保持部25に保持された後は、鉛直伸縮部26が収縮することにより、搬送路20に対応する高さまで基板Wが上昇する。その後、水平収縮部が収縮することにより、基板保持部25に保持されている基板Wが開口部23aを通じて処理ケース22内に搬送される。そして、開口部がシャッター24によって密閉される。このようにして、処理ケース22の外から中に基板Wが搬送される。
【0044】
一方、処理ケース22の中から外に基板Wが搬送されるときは、前述の一連の動作と同様の動作が行われる。すなわち、基板保持部25、鉛直伸縮部26、および水平伸縮部27が処理ケース22内において開口部23aの近傍に配置されており、開口部23aが開かれている状態で、水平伸縮部27がライン延伸方向D2に伸長する。これにより、基板保持部25に保持されている基板Wが、開口部23aを通って処理ケース22の外に搬送される。そして、基板保持部25に保持されている基板Wが基板支持部材32の上方に位置するように、基板保持部25および鉛直伸縮部26が処理ケース22の外に配置される。この状態で、基板保持部25に保持されている基板Wの下面(表面)の周縁部が基板支持部材32に接する位置まで、鉛直伸縮部26が伸長する。これにより、基板保持部25に保持されている基板Wが基板支持部材32に支持される。その後、鉛直伸縮部26および水平伸縮部27が順に収縮することにより、基板保持部25および鉛直伸縮部26が処理ケース22内に退避する。そして、開口部23aがシャッター24によって密閉される。このようにして、処理ケース22の中から外に基板Wが搬送される。
【0045】
図5は、本発明の第1実施形態に係る搬入・搬出ステーション11の概略構成を示す平面図である。図6は、本発明の第1実施形態に係る搬入・搬出ステーション11の概略構成を示す側面図である。
搬入・搬出ステーション11は、基板Wを支持する基板支持部材32と、基板Wの表裏を反転させる反転機構33とを含む。反転機構33は、一対の挟持部材34と、開閉機構35と、昇降機構36と、回転機構37とを含む。一対の挟持部材34は、水平方向に対向している。挟持部材34は、一対の挟持部38を含む。一方の挟持部材34に設けられた一対の挟持部38は、他方の挟持部材34側に開いた溝39を有している。一対の挟持部38は、一対の挟持部材34が対向する方向に直交する水平な方向に間隔を空けて配置されている。挟持部材34は、水平方向および鉛直方向に移動可能であり、一対の挟持部材34が対向する方向に延びる水平な反転軸線L2まわりに回転可能である。
【0046】
開閉機構35は、開位置と、開位置に位置しているときよりも一対の挟持部材34の間隔が小さい閉位置との間で一対の挟持部材34を水平方向に移動させる。昇降機構36は、基板支持部材32と一対の挟持部材34との間での基板Wの受け渡しが行われる受け渡し高さと、一対の挟持部材34によって保持された基板Wが反転される反転高さ(図5に示す位置)との間で、一対の挟持部材34を同期させながら鉛直方向に移動させる。回転機構37は、一対の挟持部材34を同期させながら、一対の挟持部材34を反転軸線L2まわりに180度回転させる。
【0047】
基板Wの表裏が反転される場合には、基板支持部材32に基板Wが支持されており、一対の挟持部材34が受け渡し高さに配置されている状態で、開閉機構35が、一対の挟持部材34を開位置から閉位置に移動させる。これにより、基板Wの周縁部が各挟持部38の溝39に入り込み、基板Wが一対の挟持部材34によって挟持される。そして、一対の挟持部材34によって基板Wが保持されている状態で、昇降機構36が、一対の挟持部材34を受け渡し高さから反転高さに移動させる。その後、回転機構37が一対の挟持部材34を反転軸線L2まわりに180度回転させる。これにより、基板Wの表裏が反転される。
【0048】
基板Wの表裏が反転された後は、一対の挟持部材34に保持されている基板Wの下面の周縁部が基板支持部材32に接する高さ(受け渡し高さ)まで、昇降機構36が一対の挟持部材34を下降させる。その後、開閉機構35が、一対の挟持部材34を閉位置から開位置に移動させる。これにより、各挟持部38が基板Wから離れて、一対の挟持部材34による基板Wの保持が解除される。すなわち、一対の挟持部材34から基板支持部材32に基板Wが渡され、基板支持部材32だけで基板Wが支持される。その後、昇降機構36が一対の挟持部材34を上昇させて基板支持部材32から退避させる。
【0049】
図7は、本発明の第1実施形態に係る第1薬液供給ステーション13の概略構成を示す模式図である。図8は、本発明の第1実施形態に係る第2薬液供給ステーション15の概略構成を示す模式図である。
図7に示すように、第1薬液供給ステーション13の第1加熱ステーション16は、薬液を貯留している第1貯留槽40(処理液供給手段、洗浄槽)と、第1貯留槽40に貯留されている薬液に浸漬されている全面処理スポンジ41(スポンジ)と、全面処理スポンジ41を保持する第1保持部材42(スポンジ保持手段)と、第1保持部材42を鉛直方向に昇降させる昇降機構43と、第1貯留槽40に貯留されている薬液を循環させる循環配管44と、循環配管44に介装されたポンプ45およびフィルタ46と、循環配管44を流れる薬液を加熱するヒータ47a(温度変更手段、加熱手段)とを含む。また、第1薬液供給ステーション13の第1冷却ステーション17は、第1貯留槽40と、全面処理スポンジ41と、第1保持部材42と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、循環配管44を流れる薬液を冷却するクーラ47b(温度変更手段、冷却手段)とを含む。すなわち、第1冷却ステーション17は、ヒータ47aの代わりにクーラ47bを備えており、ヒータ47a以外は第1加熱ステーション16と同様の構成を備えている。
【0050】
また、図8に示すように、第2薬液供給ステーション15の第2加熱ステーション18は、第2貯留槽48(処理液供給手段、洗浄槽)と、部分処理スポンジ49(スポンジ)と、第2保持部材50(スポンジ保持手段)と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、ヒータ47aとを含む。また、第2薬液供給ステーション15の第2冷却ステーション19は、第2貯留槽48と、部分処理スポンジ49と、第2保持部材50と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、クーラ47bとを含む。すなわち、第2冷却ステーション19は、ヒータ47aの代わりにクーラ47bを備えており、ヒータ47a以外は第2加熱ステーション18と同様の構成を備えている。また、第1薬液供給ステーション13に設けられた第1貯留槽40と第2薬液供給ステーション15に設けられた第2貯留槽48の相違点は、大きさであり、第2貯留槽48の方が第1貯留槽40よりも大きい。同様に、第1保持部材42と第2保持部材50の相違点は、大きさであり、第2保持部材50の方が第1保持部材42よりも大きい。また、全面処理スポンジ41と部分処理スポンジ49との相違点は、大きさであり、部分処理スポンジ49の方が、全面処理スポンジ41よりも小さい。
【0051】
このように、第2薬液供給ステーション15は、第1薬液供給ステーション13と同様の構成を備えているから、以下では、第1薬液供給ステーション13について主として説明する。第2薬液供給ステーション15については、第1薬液供給ステーション13と異なる点についてのみ説明する。
図7に示すように、第1貯留槽40は、基板Wよりも大きい上向きに開いた開口部を有している。第1保持部材42は、薬液中に配置されている。図7と図8とを比較すると分かるように、第2貯留槽48の開口部は、第1貯留槽40の開口部よりも大きい。また、第2保持部材50は、第2貯留槽48の開口部に対応する大きさを有しており、薬液中に配置されている。図7に示すように、第1保持部材42は、流体が第1保持部材42を通って上下に移動できるように構成された網状の部材である。第1保持部材42は、薬液の液面の下方に配置されている。第1保持部材42は、第1貯留槽40に対して鉛直方向に移動可能である。後述するように全面処理スポンジ41が洗浄されるときには、昇降機構43が第1保持部材42を昇降させる。
【0052】
図7に示すように、全面処理スポンジ41は、その一部が薬液に浸かっている処理位置で第1保持部材42によって下から支持されている。処理位置では、全面処理スポンジ41の上面41a(第1基板接触面)は、薬液の液面よりも上方に配置されており、全面処理スポンジ41の下面41bは、薬液中に配置されている。全面処理スポンジ41は、液体を吸収可能で弾性変形可能な多孔質材料によって形成されている。多孔質材料は、たとえば、PVA(ポリビニルアルコール)、PP(ポリプロピレン)、およびPE(ポリエチレン)の少なくとも一つを含む。全面処理スポンジ41の上面41aおよび下面41bは、たとえば、基板Wの直径以上の直径を有する円形の水平面である。第1実施形態では、全面処理スポンジ41の上面41aが第1基板接触面として機能する。すなわち、基板Wが全面処理スポンジ41の上方に位置している状態で、鉛直伸縮部26が伸長すると、基板搬送ロボット21に保持されている基板Wの下面の全域が、全面処理スポンジ41の上面41aに押し付けられる。これにより、全面処理スポンジ41に吸収されている薬液が染み出て、基板Wの下面の全域に薬液が供給される。
【0053】
また、図8に示すように、部分処理スポンジ49は、その一部が薬液に浸かっている処理位置で第2保持部材50によって下から支持されている。処理位置では、部分処理スポンジ49の上面49a(第2基板接触面)は、薬液の液面よりも上方に配置されており、部分処理スポンジ49の下面49bは、薬液中に配置されている。部分処理スポンジ49は、液体を吸収可能で弾性変形可能な多孔質材料によって形成されている。部分処理スポンジ49の上面49aおよび下面49bは、たとえば、基板Wの上面および下面よりも小さい水平面である。第1実施形態では、部分処理スポンジ49の上面49aが第2基板接触面として機能する。すなわち、基板Wが部分処理スポンジ49の上方に位置している状態で、鉛直伸縮部26が伸長すると、基板搬送ロボット21に保持されている基板Wの下面の一部が、部分処理スポンジ49の上面49aに押し付けられる。これにより、部分処理スポンジ49に吸収されている薬液が染み出て、基板Wの下面の一部に薬液が供給される。制御装置4は、水平移動部28および回転機構31(図3および図4参照)を制御して、ライン延伸方向D2への基板Wの位置および基板回転軸線L1まわりの基板Wの回転角度を変更することにより、基板Wの下面内の任意の部分と部分処理スポンジ49とを接触させる。
【0054】
また、図7に示すように、循環配管44は、第1保持部材42よりも下方で第1貯留槽40に接続されている上流端44aおよび下流端44bを含む。第1貯留槽40に貯留されている薬液は、ポンプ45の吸引力によって上流端44aから循環配管44内に流れ込む。そして、循環配管44内に流れ込んだ薬液は、フィルタ46を通過した後、下流端44bから第1貯留槽40に戻る。このようにして、第1貯留槽40に貯留されている薬液が循環する。薬液がフィルタ46を通過することにより、薬液に含まれるパーティクルなどの異物が除去される。また、第1加熱ステーション16では、ヒータ47aが循環配管44に取り付けられており、第1冷却ステーション17では、クーラ47bが循環配管44に取り付けられている。したがって、薬液が循環配管44を流れることにより、この薬液が加熱または冷却される。ヒータ47aおよびクーラ47bの温度は、制御装置4によって制御される。
【0055】
循環配管44を流れる薬液が加熱されることにより、第1貯留槽40に貯留されている薬液の温度が上がる。したがって、全面処理スポンジ41自体や全面処理スポンジ41に吸収されている薬液の温度も上がる。そのため、基板Wが第1加熱ステーション16で全面処理スポンジ41に押し付けられることにより、基板Wが加熱される。一方、循環配管44を流れる薬液が冷却されることにより、第1貯留槽40に貯留されている薬液の温度が下がる。したがって、全面処理スポンジ41自体や全面処理スポンジ41に吸収されている薬液の温度も下がる。そのため、基板Wが第1冷却ステーション17で全面処理スポンジ41に押し付けられることにより、基板Wが冷却される。このように、基板Wが全面処理スポンジ41に押し付けられることにより、基板Wが加熱または冷却され、基板Wの温度が変化する。
【0056】
図9は、本発明の第1実施形態に係るリンス・乾燥ステーション12の概略構成を示す模式図である。
リンス・乾燥ステーション12は、基板搬送ロボット21に保持されている基板Wの下面に向けてリンス液の一例である純水(脱イオン水)を吐出するリンス液ノズル51(リンス液供給手段)と、リンス液ノズル51に純水を供給するリンス液配管52と、リンス液配管52に介装されたリンス液バルブ53と、リンス液ノズル51を水平方向に移動させるノズル移動機構54と、基板Wから排出された液体を受け止めるカップ55と、カップ55内に溜まった液体をカップ55の外に排出する排出配管(図示せず)とを含む。カップ55は、有底筒状である。カップ55は、基板Wよりも大きい上向きに開いた開口部を有している。リンス液ノズル51およびノズル移動機構54は、カップ55内に配置されている。基板搬送ロボット21に保持されている基板Wは、基板Wがカップ55の上方に位置している状態で鉛直伸縮部26が伸長することにより、カップ55内に搬送される。また、基板Wがカップ55内に位置している状態で、鉛直伸縮部26が収縮することにより、基板Wがカップ55の外に搬送される。
【0057】
基板Wに純水が供給されるときには、基板Wがカップ55内に位置している状態で、制御装置4が、回転機構31(図4参照)を制御することにより、基板回転軸線L1まわりに基板Wを回転させる。そして、制御装置4は、リンス液バルブ53を開くことにより、基板Wを回転させながら、リンス液ノズル51から基板Wの下面に向けて純水を吐出させる。さらに、この状態で、制御装置4は、ノズル移動機構54を制御することにより、リンス液ノズル51を水平方向に移動させる。これにより、基板Wに対する純水の供給位置が、基板Wの下面中央部と基板Wの下面周縁部との間で移動する。したがって、基板Wの下面が純水によって走査され、基板Wの下面の全域に純水が供給される。
【0058】
純水が基板Wに供給された後は、制御装置4が基板Wを乾燥させる。具体的には、制御装置4が、ノズル移動機構54を制御することにより、リンス液ノズル51の移動を停止させる。さらに、制御装置4は、リンス液バルブ53を閉じることにより、リンス液ノズル51からの純水の吐出を停止させる。そして、基板Wがカップ55内に位置している状態で、制御装置4が、回転機構31を制御することにより、基板回転軸線L1まわりに高回転速度(たとえば、数千rpm)で基板Wを回転させる。これにより、基板Wに付着している純水に大きな遠心力が加わり、基板Wに付着している純水が基板Wの周囲に振り切られる。このようにして、基板Wから純水が除去され、基板Wが乾燥する。また、基板Wの周囲に飛散した純水や、基板Wから落下した純水は、カップ55によって受け止められ、排出配管を通ってカップ55の外に排出される。
【0059】
図10は、本発明の第1実施形態に係るスポンジ洗浄装置56の概略構成を示す模式図である。図11は、全面処理スポンジ41が薬液中で圧縮されている状態を示す模式図である。図12は、全面処理スポンジ41が空気中で圧縮されている状態を示す模式図である。
図10に示すように、全面処理ライン9は、全面処理スポンジ41を洗浄するスポンジ洗浄装置56(スポンジ洗浄手段)をさらに備えている。スポンジ洗浄装置56は、洗浄槽としての第1貯留槽40と、第1保持部材42と、昇降機構43と、循環配管44と、フィルタ46と、全面処理スポンジ41を圧縮するスポンジ洗浄ロボット57とを含む。昇降機構43は、処理位置(実線で示す位置)の下方に設けられた洗浄位置(一点鎖線で示す位置)と、処理位置の上方に設けられた絞り位置(二点鎖線で示す位置)との間で第1保持部材42を移動させる。洗浄位置は、全面処理スポンジ41の全体が薬液に浸かっている位置であり、絞り位置は、全面処理スポンジ41の全体が薬液に浸かっていない位置である。図示はしないが、部分処理ライン10も、全面処理ライン9と同様に、部分処理スポンジ49を洗浄するスポンジ洗浄装置56を備えている。部分処理ライン10に設けられたスポンジ洗浄装置56の構成は、全面処理ライン9に設けられたスポンジ洗浄装置56の構成と同様であるので、以下では、全面処理ライン9に設けられたスポンジ洗浄装置56の構成について説明する。
【0060】
図10に示すように、スポンジ洗浄ロボット57は、基板搬送ロボット21と同様の構成を有している。すなわち、スポンジ洗浄ロボット57は、プレート58と、プレート保持部59と、鉛直伸縮部26と、水平移動部28とを含む。さらに、図示はしないが、スポンジ洗浄ロボット57は、昇降機構30および回転機構31(図4参照)を含む。プレート58は、プレート保持部59の下方でプレート保持部59によって水平に保持されている。プレート保持部59は、鉛直伸縮部26の下方で鉛直伸縮部26によって保持されている。鉛直伸縮部26は、水平移動部28の下方で水平移動部28によって支持されている。水平移動部28は、第1薬液供給ステーション13とスポンジ洗浄ロボット待機ステーション14との間で、スポンジ洗浄ロボット57をライン延伸方向D2に移動させる。これにより、スポンジ洗浄ロボット57が、全面処理スポンジ41の上方に配置される。
【0061】
全面処理スポンジ41が洗浄されるときには、制御装置4が、昇降機構43によって第1保持部材42を洗浄位置に移動させる。そして、制御装置4は、スポンジ洗浄ロボット57が全面処理スポンジ41の上方に位置しており、全面処理スポンジ41の全体が薬液に浸かっている状態で、スポンジ洗浄ロボット57の鉛直伸縮部26を伸長させて、スポンジ洗浄ロボット57のプレート58を水平な姿勢で下降させる。これにより、図11に示すように、全面処理スポンジ41が、プレート58と第1保持部材42とによって上下に挟まれて、全面処理スポンジ41が薬液中で圧縮される。そのため、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、この異物は、薬液と共に循環配管44を流れることにより、フィルタ46によって捕獲される。全面処理スポンジ41が圧縮された後は、制御装置4は、スポンジ洗浄ロボット57の鉛直伸縮部26を収縮させて、スポンジ洗浄ロボット57のプレート58を水平な姿勢で上昇させる。これにより、プレート58が全面処理スポンジ41から離れ、全面処理スポンジ41が元の形状に復元する。そのため、全面処理スポンジ41が薬液を吸収する。
【0062】
次に、制御装置4は、昇降機構43によって第1保持部材42を絞り位置に移動させる。これにより、全面処理スポンジ41が、薬液の液面よりも上方に移動し、第1貯留槽40に貯留されている薬液から離れる。そして、制御装置4は、全面処理スポンジ41の全体が薬液に浸かっていない状態で、スポンジ洗浄ロボット57の鉛直伸縮部26を伸長させて、スポンジ洗浄ロボット57のプレート58を水平な姿勢で下降させる。これにより、図12に示すように、全面処理スポンジ41が、プレート58と第1保持部材42とによって上下に挟まれて、全面処理スポンジ41が空気中で圧縮される。すなわち、全面処理スポンジ41が絞られ、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、全面処理スポンジ41から押し出された異物および薬液は、第1貯留槽40に落下し、循環配管44を流れる。
【0063】
制御装置4は、スポンジ洗浄ロボット57等にこのような動作を繰り返し実行させることにより全面処理スポンジ41を洗浄させる。すなわち、制御装置4は、薬液中で全面処理スポンジ41を圧縮および復元させると共に、空気中で全面処理スポンジ41を圧縮および復元させる。このように、薬液中での全面処理スポンジ41の圧縮および復元と、空気中での全面処理スポンジ41の圧縮および復元とが繰り返し実行されることにより、全面処理スポンジ41の内部に保持されている異物が確実に除去され、全面処理スポンジ41の清浄度が高められる。したがって、基板Wと全面処理スポンジ41とが接触したときに、全面処理スポンジ41から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止できる。
【0064】
図13は、本発明の第1実施形態に係る基板Wの処理の一例について説明するためのフローチャートである。
基板処理装置1で基板Wが処理されるときには、制御装置4が、一枚の基板Wをインデクサロボット6によってキャリアCから搬出させる(S1)。そして、制御装置4は、この基板Wをインデクサロボット6によって測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S2)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3)。すなわち、たとえば汚染されている部分が広い場合には、制御装置4は、全面処理ライン9を選択し、インデクサロボット6によって測定ユニット8から全面処理ライン9に基板Wを搬入させる。一方、汚染されている部分が狭い場合には、制御装置4は、部分処理ライン10を選択し、インデクサロボット6によって測定ユニット8から部分処理ライン10に基板Wを搬送させる。
【0065】
制御装置4が全面処理ライン9を選択した場合には、制御装置4は、インデクサロボット6によって全面処理ライン9の搬入・搬出ステーション11に基板Wを搬入させる。すなわち、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。搬入・搬出ステーション11に基板Wが搬入された後は、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、裏面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。その後、制御装置4は、基板支持部材32に支持されている基板Wを基板搬送ロボット21によって保持させ、基板搬送ロボット21によって搬入・搬出ステーション11から第1薬液供給ステーション13に基板Wを移動させる。そして、制御装置4は、基板搬送ロボット21に保持されている基板Wの下面(表面)を全面処理スポンジ41に押し付けさせる。
【0066】
具体的には、制御装置4は、基板搬送ロボット21によって基板Wを第1加熱ステーション16に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第1加熱ステーション16の全面処理スポンジ41に押し付けさせる。これにより、基板Wの下面の全域に薬液が供給されると共に、基板Wが加熱される。基板Wの下面が第1加熱ステーション16の全面処理スポンジ41に押し付けられた後は、制御装置4は、基板搬送ロボット21によって基板Wを第1冷却ステーション17に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第1冷却ステーション17の全面処理スポンジ41に押し付けさせる。これにより、基板Wの下面の全域に薬液が供給されると共に、基板Wが冷却される。
【0067】
制御装置4は、第1薬液供給ステーション13でこのような動作を基板搬送ロボット21に繰り返し実行させる。これにより、基板Wの下面の全域に薬液が供給されると共に、基板Wの加熱および冷却が交互に複数回実行される(S4)。
第1加熱ステーション16および第1冷却ステーション17のいずれのステーションにおいても、制御装置4は、全面処理スポンジ41と基板Wの下面とが接触している状態で全面処理スポンジ41と基板Wとが相対移動するように基板搬送ロボット21を制御して、基板Wの汚染状態に応じて全面処理スポンジ41と基板Wとを摺動させてもよい。
【0068】
具体的には、制御装置4は、全面処理スポンジ41と基板Wとが接触している状態で、基板搬送ロボット21をライン延伸方向D2に往復させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。また、制御装置4は、全面処理スポンジ41と基板Wとが接触している状態で、基板搬送ロボット21によって基板Wを回転させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。
【0069】
また、第1加熱ステーション16および第1冷却ステーション17のいずれのステーションにおいても、制御装置4は、測定ユニット8の測定結果に基づいて基板Wの下面に対する全面処理スポンジ41の押し付け量を変更してもよい。すなわち、基板Wの下面に対する全面処理スポンジ41の押し付け量が増加すると、全面処理スポンジ41から染み出る薬液の量も増加する。したがって、たとえば基板Wの汚染度が高い場合には、制御装置4は、基板Wの汚染度が低い場合に比べて押し付け量が増加するように基板搬送ロボット21を制御して、基板Wに対する薬液の供給量を増加させてもよい。
【0070】
第1薬液供給ステーション13で基板Wに薬液が供給された後は、制御装置4は、基板搬送ロボット21によって第1薬液供給ステーション13からリンス・乾燥ステーション12に基板Wを移動させる。そして、制御装置4は、基板Wの下面の全域に純水を供給させることにより、基板Wの下面に付着している薬液を洗い流す(S5)。その後、制御装置4は、基板搬送ロボット21によって基板Wを高回転速度で回転させることにより、基板Wに付着している純水を除去させる。これにより、基板Wが乾燥する(S6)。基板Wが乾燥した後は、制御装置4は、基板搬送ロボット21によってリンス・乾燥ステーション12から搬入・搬出ステーション11に基板Wを移動させる。その後、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。そして、制御装置4は、インデクサロボット6によって基板支持部材32上に載置されている基板Wを搬出させる。
【0071】
一方、制御装置4が部分処理ライン10を選択した場合には、制御装置4は、インデクサロボット6によって部分処理ライン10の搬入・搬出ステーション11に基板Wを搬入させる。すなわち、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。搬入・搬出ステーション11に基板Wが搬入された後は、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、裏面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。その後、制御装置4は、基板支持部材32に支持されている基板Wを基板搬送ロボット21によって保持させ、基板搬送ロボット21によって搬入・搬出ステーション11から第2薬液供給ステーション15に基板Wを移動させる。そして、制御装置4は、基板搬送ロボット21に保持されている基板Wの下面(表面)を部分処理スポンジ49に押し付けさせる。
【0072】
具体的には、制御装置4は、基板搬送ロボット21によって基板Wを第2加熱ステーション18に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第2加熱ステーション18の部分処理スポンジ49に押し付けさせる。これにより、基板Wの下面の一部に薬液が供給されると共に、基板Wが加熱される。基板Wの下面が第2加熱ステーション18の部分処理スポンジ49に押し付けられた後は、制御装置4は、基板搬送ロボット21によって基板Wを第2冷却ステーション19に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第2冷却ステーション19の部分処理スポンジ49に押し付けさせる。これにより、基板Wの下面の一部に薬液が供給されると共に、基板Wが冷却される。制御装置4は、このような動作を基板搬送ロボット21に繰り返し実行させる。
【0073】
第2加熱ステーション18および第2冷却ステーション19のいずれのステーションにおいても、制御装置4は、基板Wの下面の汚染されている部分と部分処理スポンジ49とが接触するように、測定ユニット8の測定結果に基づいてライン延伸方向D2への基板Wの位置および基板回転軸線L1まわりの基板Wの回転角度を制御する。すなわち、制御装置4は、基板Wの下面において部分処理スポンジ49が接触する部分を測定ユニット8の測定結果に基づいて基板Wごとに設定する。そして、制御装置4は、設定した部分と部分処理スポンジ49とが接触するように基板搬送ロボット21を制御する。これにより、制御装置4によって設定された部分に薬液が供給される。すなわち、基板Wの下面において汚染されている部分に薬液が確実に供給される。
【0074】
制御装置4は、第2薬液供給ステーション15でこのような動作を基板搬送ロボット21に繰り返し実行させる。これにより、基板Wの下面の一部に薬液が供給されると共に、基板Wの加熱および冷却が交互に複数回実行される(S4)。
第2加熱ステーション18および第2冷却ステーション19のいずれのステーションにおいても、制御装置4は、部分処理スポンジ49と基板Wとが接触している状態で、基板搬送ロボット21をライン延伸方向D2に往復させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。また、制御装置4は、部分処理スポンジ49と基板Wとが接触している状態で、基板搬送ロボット21によって基板Wを回転させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。さらに、制御装置4は、基板Wの汚染状態に応じて基板Wの下面に対する部分処理スポンジ49の押し付け量を制御してもよい。
【0075】
第2薬液供給ステーション15で基板Wに薬液が供給された後は、制御装置4は、基板搬送ロボット21によって第1薬液供給ステーション13からリンス・乾燥ステーション12に基板Wを移動させる。そして、制御装置4は、基板Wの下面の全域に純水を供給させることにより、基板Wの下面に付着している薬液を洗い流す(S5)。その後、制御装置4は、基板搬送ロボット21によって基板Wを高回転速度で回転させることにより、基板Wに付着している純水を除去させる。これにより、基板Wが乾燥する(S6)。基板Wが乾燥した後は、制御装置4は、基板搬送ロボット21によってリンス・乾燥ステーション12から搬入・搬出ステーション11に基板Wを移動させる。その後、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。そして、制御装置4は、インデクサロボット6によって基板支持部材32上に載置されている基板Wを搬出させる。
【0076】
制御装置4は、全面処理ライン9および部分処理ライン10から搬出された基板Wをインデクサロボット6によって再び測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S7)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて基板Wに対する薬液の供給を再び行うか否かを判定する(S8)。
【0077】
具体的には、基板Wが汚染されていない場合(S8でYESの場合)には、制御装置4は、インデクサロボット6によって測定ユニット8からキャリアCに基板Wを搬送させ、この基板Wへの薬液の供給を終了させる(S9)。一方、基板Wが汚染されている場合(S8でNOの場合)には、制御装置4は、全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3に戻る)。そして、全面処理ライン209または部分処理ライン210で、薬液処理、リンス処理、および乾燥処理が実行される(2回目のS4〜6)。その後、制御装置4は、基板Wの汚染状態を測定ユニット8によって測定させる(2回目のS8)。制御装置4は、基板Wの汚染がなくなるまで、このような動作を繰り返し実行させる。
【0078】
以上のように第1実施形態では、基板搬送ロボット21が、貯留槽40、48によって薬液が供給されたスポンジ41、49と基板搬送ロボット21に保持されている基板Wとを相対移動させて、スポンジ41、49と基板Wの下面とを接触させる。これにより、スポンジ41、49が弾性変形して、スポンジ41、49に吸収されている薬液が染み出る。そのため、薄い液膜(薬液の液膜)が形成され、この液膜によって基板Wの下面が覆われる。したがって、基板Wにおいてスポンジ41、49が接触した部分に薬液を確実に供給することできる。さらに、スポンジ41、49と基板Wとの接触により薬液が基板Wに一瞬で供給されるから、薬液の供給に要する時間を短縮することができる。しかも、この基板Wの下面に供給された薬液は、基板Wの下面におけるスポンジ41、49との接触部分を覆う必要最低限の量であるから、薬液の消費量を低減することができる。
【0079】
さらに、スポンジ41、49と基板Wとが接触すると、基板Wの下面におけるスポンジ41、49との接触部分に薬液が均一に供給される。したがって、処理の均一性が向上する。しかも、基板Wに供給された薬液が少量であるから、基板Wに供給された薬液が基板Wに沿って流れることを抑制または防止することができる。すなわち、基板Wに供給された薬液は基板Wに留まる。たとえば、薬液が基板Wに沿って流動すると、薬液が流動している部分と流動していない部分とで処理に差が生じる場合がある。したがって、薬液の流動を抑制または防止することにより、処理の均一性をさらに向上させることができる。さらに、薬液が基板Wに留まるから、薬液の処理能力が十分に発揮される。すなわち、たとえば基板Wに供給された薬液が基板Wからすぐに排出されると、基板Wを処理する能力を有している状態で薬液が基板Wから離れる。したがって、薬液の流動を抑制または防止することにより、薬液を効率的に使用することができる。
【0080】
また第1実施形態では、基板搬送ロボット21が制御装置4によって制御されることにより、全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジと基板Wとが接触する。全面処理スポンジ41は、基板Wの下面以上の大きさの第1基板接触面(全面処理スポンジ41の上面41a)を有しているから、制御装置4が全面処理スポンジ41と基板Wとを接触させることにより、基板Wの下面の全域に薬液を一瞬で供給することができる。一方、部分処理スポンジ49は、基板Wの下面よりも小さい第2基板接触面(部分処理スポンジ49の上面49a)を有しているから、制御装置4が部分処理スポンジ49と基板Wとを接触させることにより、基板Wの下面の一部に薬液を供給することができる。したがって、薬液の供給が必要でない部分に薬液が供給されることを抑制または防止することができる。
【0081】
また第1実施形態では、測定ユニット8によって基板Wの汚染状態が測定される。制御装置4は、測定ユニット8の測定結果に基づいて全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する。制御装置4は、部分処理スポンジ49を選択したときに、基板Wの下面において部分処理スポンジ49が接触する部分を測定ユニット8の測定結果に基づいて基板Wごとに設定する。そして、制御装置4は、設定した部分と部分処理スポンジ49とが接触するように基板搬送ロボット21を制御する。したがって、基板Wの汚染されている部分に部分処理スポンジ49を確実に接触させて、この部分に薬液を確実に供給することができる。これにより、基板Wの清浄度を向上させることができる。
【0082】
また第1実施形態では、基板搬送ロボット21が、貯留槽40、48に貯留されている薬液にスポンジ41、49が浸漬されている状態でスポンジ41、49を圧縮する。その後、基板搬送ロボット21によるスポンジ41、49の圧縮が解除され、スポンジ41、49がその弾性によって元の形状に膨張して復元する。このようなスポンジ41、49の圧縮/膨張が繰り返し行われる。スポンジ41、49が圧縮されると、スポンジ41、49の表面に付着している異物や、スポンジ41、49の内部に保持されている異物が、薬液と共にスポンジ41、49から排出される。これにより、スポンジ41、49から異物が除去される。また、スポンジ41、49が膨張すると、スポンジ41、49は、その吸収力によって薬液を吸収する。したがって、スポンジ41、49の圧縮/膨張が繰り返し行われることにより、スポンジ41、49による薬液の吸収および排出が繰り返し行われ、スポンジ41、49から異物が確実に除去される。これにより、スポンジ41、49と基板Wとが接触したときに、スポンジ41、49から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止することができる。
【0083】
また第1実施形態では、スポンジ洗浄装置56が、貯留槽40、48に接続された循環配管44と、循環配管44に介装されたフィルタ46とを含む。貯留槽40、48に貯留されている薬液は、循環配管44に排出され、循環配管44を通って再び貯留槽40、48に戻る。これにより、貯留槽40、48に貯留されている薬液が循環する。循環配管44を流れる薬液に含まれる異物は、フィルタ46によって除去される。したがって、貯留槽40、48に貯留されている薬液に含まれる異物が、スポンジ41、49に付着することを抑制または防止することができる。これにより、スポンジ41、49と基板Wとが接触したときに、スポンジ41、49から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止することができる。
【0084】
また第1実施形態では、基板搬送ロボット21が、スポンジ41、49と基板Wとを摺動させる。具体的には、スポンジ41、49と基板Wとが接触している状態で、基板搬送ロボット21の水平移動部28が、スポンジ41、49をライン延伸方向D2に往復させることにより、スポンジ41、49と基板Wとを摺動させる。また、スポンジ41、49と基板Wとが接触している状態で、基板搬送ロボット21が、基板Wを回転させることにより、スポンジ41、49と基板Wとを摺動させる。これにより、基板Wの下面に付着している異物がスポンジ41、49によって擦り取られる。これにより、基板Wの清浄度を向上させることができる。
【0085】
また第1実施形態では、制御装置4が、測定ユニット8の測定結果に基づいてスポンジ41、49と基板Wとの摺動を制御する。すなわち、たとえば基板Wの汚染度が高い場合、制御装置4は、基板搬送ロボット21によってスポンジ41、49と基板Wとを摺動させる。一方、たとえば基板Wの汚染度が低い場合、制御装置4は、スポンジ41、49と基板Wとを摺動させない。このように、基板Wの汚染状態に応じてスポンジ41、49と基板Wとの摺動が制御されるから、基板Wの清浄度を安定させることができる。
【0086】
また第1実施形態では、制御装置4が、測定ユニット8の測定結果に基づいて基板Wの下面に対するスポンジ41、49の押し付け量を制御する。すなわち、たとえば基板Wの汚染度が高い場合、制御装置4は、基板搬送ロボット21を制御し、基板Wの汚染度が低い場合に比べて押し付け量を増加させる。これにより、スポンジ41、49から染み出る薬液の量が増加し、基板Wに供給される薬液の量が増加する。このように、基板Wの汚染状態に応じて基板Wの下面に対する薬液の供給量が制御されるから、基板Wの清浄度を安定させることができる。
【0087】
また第1実施形態では、ヒータ47aおよびクーラ47bによって基板Wが加熱および冷却される。これにより、基板Wの温度が変化し、基板Wが膨張および収縮する。また、基板Wが加熱および冷却されることにより、基板Wに付着している異物の温度が変化し、この異物が膨張および収縮する。したがって、基板Wおよび異物の両方が膨張および収縮する。基板Wの膨張率と異物の膨張率が異なる場合、基板Wおよび異物が膨張および収縮することにより、基板Wと異物との接触状態が変化し、異物が基板Wから取れ易くなる。特に、基板Wの加熱および冷却が交互に実行されるから、加熱だけまたは冷却だけが実行される場合に比べて、基板Wの温度差が大きくなる。そのため、異物が基板Wから一層取れ易くなる。これにより、異物の除去率を向上させることができる。
【0088】
また第1実施形態では、基板搬送ロボット21が基板Wを搬送する。基板搬送ロボット21によって搬送される基板Wは、搬入・搬出ステーション11から供給ステーション13、15に移動する。その後、この基板Wは、供給ステーション13、15リンス・乾燥ステーション12を通ってから搬入・搬出ステーション11に移動する。基板搬送ロボット21によって搬送される基板Wは、供給ステーション13、15でスポンジ41、49から供給される薬液によって処理される。また、基板搬送ロボット21によって搬送される基板Wは、リンス・乾燥ステーション12でリンス液ノズル51から供給される純水によって処理される。すなわち、基板Wに付着している薬液が純水によって洗い流される。その後、基板搬送ロボット21がリンス・乾燥ステーション12で基板Wを回転させることにより、基板Wに付着している純水が除去される。これにより、基板Wが乾燥する。このように、基板搬送ロボット21が基板Wを搬送することにより、一連の処理が基板Wに施される。
【0089】
また第1実施形態では、搬入・搬出ステーション11、リンス・乾燥ステーション12、および供給ステーション13、15は、この順番で搬送路20に沿って配置されている。基板搬送ロボット21は、搬送路20に沿って基板Wを搬送する。したがって、基板搬送ロボット21によって搬送される基板Wは、搬入・搬出ステーション11からリンス・乾燥ステーション12を通って供給ステーション13、15に移動する。その後、この基板Wは、供給ステーション13、15からリンス・乾燥ステーション12を通って搬入・搬出ステーション11に移動する。すなわち、リンス・乾燥ステーション12でリンス処理および乾燥処理が行われた基板Wは、供給ステーション13、15を通過せずに、リンス・乾燥ステーション12から搬入・搬出ステーション11に移動する。したがって、供給ステーション13、15に漂う薬液の雰囲気などが基板Wに付着することを抑制または防止することができる。これにより、基板Wの清浄度を向上させることができる。
【0090】
次に、この発明の第2実施形態について説明する。この第2実施形態と前述の第1実施形態との主要な相違点は、搬送される対象が異なることである。すなわち、第1実施形態では、基板Wが搬送されることにより、スポンジ41、49と基板Wとが接触するのに対し、第2実施形態では、スポンジ41、49が搬送されることにより、スポンジ41、49と基板Wとが接触する。以下の図14〜図18において、前述の図1〜図13に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0091】
図14は、本発明の第2実施形態に係る基板処理装置201のレイアウトを示す模式図である。
基板処理装置201は、枚葉式の基板処理装置である。基板処理装置201は、インデクサブロック2と、インデクサブロック2に搬入された基板Wを処理する処理ブロック203と、基板処理装置201に備えられた装置や機器を制御する制御装置4とを備えている。
【0092】
インデクサブロック2は、キャリア保持部5と、インデクサロボット6と、IR移動機構7と、測定ユニット8とを含む。インデクサロボット6は、インデクサブロック2内で基板Wを搬送すると共に、インデクサブロック2と処理ブロック203との間で基板Wを搬送する。
処理ブロック203は、基板Wを一枚ずつ処理する複数(たとえば、4つ)の処理ライン209、210を含む。各処理ライン209、210は、ライン延伸方向D2に延びている。4つの処理ライン209、210は、基板Wの上面の全域に薬液を供給する2つの全面処理ライン209と、基板Wの上面の一部に薬液を供給する2つの部分処理ライン210とを含む。2つの全面処理ライン209は、上下に重ねられており、2つの部分処理ライン210は、上下に重ねられている。上段の全面処理ライン209と上段の部分処理ライン210とは、同じ高さに配置されており、水平方向に対向している。同様に、下段の全面処理ライン209と下段の部分処理ライン210とは、同じ高さに配置されており、水平方向に対向している。
【0093】
全面処理ライン209は、基板Wの上面の全域に薬液を供給する第1薬液供給ステーション213と、後述するスポンジ搬送ロボット221(接触手段、押し付け量変更手段)が待機しているスポンジ搬送ロボット待機ステーション214とを含む。これらのステーション213、214は、インデクサブロック2側から第1薬液供給ステーション213、スポンジ搬送ロボット待機ステーション214の順番でライン延伸方向D2に配列されている。同様に、部分処理ライン210は、基板Wの上面の一部に薬液を供給する第2薬液供給ステーション215と、スポンジ搬送ロボット待機ステーション214とを含む。これらのステーション215、214は、インデクサブロック2側から第2薬液供給ステーション215、スポンジ搬送ロボット待機ステーション214の順番でライン延伸方向D2に配列されている。部分処理ライン210は、スポンジを除き、全面処理ライン209と同様の構成を有している。すなわち、全面処理ライン209は、基板Wの上面の全域に薬液を供給する全面処理スポンジ41を備えており、部分処理ライン210は、基板Wの上面の一部に薬液を供給する部分処理スポンジ49を備えている。
【0094】
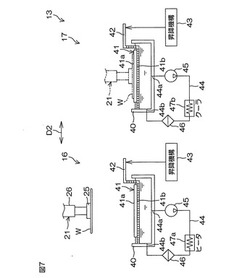
図15は、本発明の第2実施形態に係る全面処理ライン209の概略構成を説明するための模式図である。図16は、本発明の第2実施形態に係る部分処理ライン210の概略構成を説明するための模式図である。
前述のように、部分処理ライン210は、全面処理ライン209と同様の構成を備えている。したがって、以下では、全面処理ライン209について主として説明する。部分処理ライン210については、全面処理ライン209と異なる点についてのみ説明する。
【0095】
図15に示すように、全面処理ライン209は、密閉された処理ケース222を含む。第1薬液供給ステーション213およびスポンジ搬送ロボット待機ステーション214は、処理ケース222内に設けられている。第1薬液供給ステーション213は、インデクサブロック2側に配置されている。処理ケース222は、開口部223aを有する箱形の本体223と、開口部223aを開閉するシャッター224と、開口部223aが開かれる開位置と開口部223aが閉じられる閉位置との間でシャッター224を移動させるシャッター移動機構(図示せず)とを含む。開口部223aは、インデクサブロック2に面しており、インデクサロボット6がアクセス可能な位置に配置されている。
【0096】
図15に示すように、第1薬液供給ステーション213は、基板Wを水平に保持するスピンチャック260(基板保持手段)と、スピンチャック260に保持されている基板Wの上面に向けてリンス液の一例である純水を吐出するリンス液ノズル251と、リンス液ノズル251に純水を供給するリンス液配管252と、リンス液配管252に介装されたリンス液バルブ253と、リンス液ノズル251を水平方向に移動させるノズル移動機構254と、基板Wから排出された液体を受け止めるカップ255と、カップ255を昇降させるカップ昇降機構261と、カップ255内に溜まった液体をカップ255の外に排出する排出配管(図示せず)とを含む。
【0097】
スピンチャック260は、基板Wを水平に保持して当該基板Wの中心を通る鉛直な基板回転軸線L201まわりに回転可能な円盤状のスピンベース262と、スピンベース262を基板回転軸線L201まわりに回転させるスピンモータ263とを含む。スピンチャック260は、基板Wを水平方向に挟んで当該基板Wを水平に保持する挟持式のチャックであってもよいし、非デバイス形成面である基板Wの裏面(下面)を吸着することにより当該基板Wを水平に保持するバキューム式のチャックであってもよい。第2実施形態では、スピンチャック260は、たとえばバキューム式のチャックである。
【0098】
スピンチャック260は、有底円筒状のカップ255内に収容されている。カップ昇降機構261は、カップ255の上端がスピンチャック260による基板Wの保持位置よりも下方に位置する搬入・搬出位置(実線で示す位置)と、カップ255の上端がスピンチャック260による基板Wの保持位置よりも上方に位置する処理位置(二点鎖線で示す位置)との間でカップ255を昇降させる。処理ケース222の外から中に基板Wが搬送されるときには、開口部223aが開かれており、カップ255が搬入・搬出位置に配置されている状態で、インデクサロボット6が、ハンドHを処理ケース222内に移動させ、基板Wをスピンチャック260上に載置させる。処理ケース222の中から外に基板Wが搬送されるときも同様に、開口部223aが開かれており、カップ255が搬入・搬出位置に配置されている状態で、インデクサロボット6が、スピンチャック260上に載置されている基板WをハンドHによって保持し、この基板Wを処理ケース222の外に移動させる。
【0099】
図15に示すように、全面処理ライン209のスポンジ搬送ロボット待機ステーション214は、第1貯留槽40と、全面処理スポンジ41と、第1保持部材42と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、温度調整装置247(温度変更手段)とを含む。さらに、スポンジ搬送ロボット待機ステーション214は、第1薬液供給ステーション213とスポンジ搬送ロボット待機ステーション214との間で全面処理スポンジ41を搬送するスポンジ搬送ロボット221を含む。温度調整装置247は、ヒータであってもよいし、クーラであってもよい。
【0100】
同様に、図16に示すように、部分処理ライン210のスポンジ搬送ロボット待機ステーション214は、第1貯留槽40と、部分処理スポンジ49と、第1保持部材42と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、温度調整装置247とを含む。さらに、スポンジ搬送ロボット待機ステーション214は、第2薬液供給ステーション215とスポンジ搬送ロボット待機ステーション214との間で部分処理スポンジ49を搬送するスポンジ搬送ロボット221を含む。
【0101】
図15に示すように、スポンジ搬送ロボット221は、スポンジ保持部225(スポンジ保持手段)と、鉛直伸縮部26と、水平移動部28とを含む。図示はしないが、スポンジ搬送ロボット221は、鉛直伸縮部26を鉛直方向に伸縮させる昇降機構30と、スポンジ保持部225を鉛直軸線まわりに回転させる回転機構31とをさらに含む(図4参照)。スポンジ保持部225は、鉛直伸縮部26の下方で鉛直伸縮部26に支持されている。鉛直伸縮部26は、水平移動部28の下方で水平移動部28に支持されている。全面処理スポンジ41は、スポンジ保持部225の下方でスポンジ保持部225に保持されている。また、図16に示すように、部分処理スポンジ49は、スポンジ保持部225の下方でスポンジ保持部225に保持されている。
【0102】
図15に示すように、全面処理スポンジ41は、第1貯留槽40に貯留されている薬液に浸漬されており、基板Wに薬液が供給されるときに、スポンジ搬送ロボット221によって第1薬液供給ステーション213に搬送される。同様に、図16に示すように、部分処理スポンジ49は、第1貯留槽40に貯留されている薬液に浸漬されており、基板Wに薬液が供給されるときに、スポンジ搬送ロボット221によって第2薬液供給ステーション215に搬送される。第2実施形態では、全面処理スポンジ41の下面41bが第1基板接触面として機能し、部分処理スポンジ49の下面49bが第2基板接触面として機能する。
【0103】
図17は、全面処理スポンジ41が薬液中で圧縮されている状態を示す模式図である。図18は、全面処理スポンジ41が空気中で圧縮されている状態を示す模式図である。以下では、全面処理スポンジ41が洗浄されるときの動作の一例について説明する。部分処理スポンジ49が洗浄されるときの動作については、全面処理スポンジ41が洗浄されるときと同様であるので、その説明を省略する。以下では、図15、図17、および図18を参照する。
【0104】
全面処理スポンジ41が洗浄されるときには、制御装置4が、昇降機構43によって第1保持部材42を洗浄位置(図17に示す位置)に移動させる。そして、制御装置4は、第1保持部材42が洗浄位置に位置しており、スポンジ搬送ロボット221が第1貯留槽40の上方に位置している状態で、スポンジ搬送ロボット221の鉛直伸縮部26を伸長させて、全面処理スポンジ41を水平な姿勢で下降させる。これにより、全面処理スポンジ41の全体が薬液に浸かると共に、全面処理スポンジ41が、スポンジ搬送ロボット221と第1保持部材42とによって上下に挟まれて、全面処理スポンジ41が薬液中で圧縮される。そのため、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、この異物は、薬液と共に循環配管44を流れることにより、フィルタ46によって捕獲される。全面処理スポンジ41が圧縮された後は、制御装置4は、スポンジ搬送ロボット221の鉛直伸縮部26を収縮させて、全面処理スポンジ41を水平な姿勢で上昇させる。これにより、全面処理スポンジ41が、薬液の液面よりも上方に移動し、第1貯留槽40に貯留されている薬液から離れる。また、全面処理スポンジ41は、上昇している間に元の形状に復元し、第1貯留槽40に貯留されている薬液を吸収する。
【0105】
次に、制御装置4は、昇降機構43によって第1保持部材42を絞り位置(図18に示す位置)に移動させる。これにより、第1保持部材42が、薬液の液面よりも上方に移動し、第1貯留槽40に貯留されている薬液から離れる。また、第1保持部材42が絞り位置に移動することにより、第1保持部材42が全面処理スポンジ41に近づき、全面処理スポンジ41が、スポンジ搬送ロボット221と第1保持部材42とによって上下に挟まれて空気中で圧縮される。これにより、全面処理スポンジ41が絞られ、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、全面処理スポンジ41から押し出された異物および薬液は、第1貯留槽40に落下し、循環配管44を流れる。第1保持部材42が絞り位置に移動した後は、制御装置4は、第1保持部材42を再び洗浄位置に移動させる。第1保持部材42が洗浄位置に移動することにより、第1保持部材42が全面処理スポンジ41から離れ、全面処理スポンジ41が元の形状に復元する。
【0106】
このように、第2実施形態では、昇降機構43が第1保持部材42を移動させることにより、全面処理スポンジ41が圧縮される。すなわち、第2実施形態では、昇降機構43が圧縮手段として機能する。制御装置4は、スポンジ搬送ロボット221等に前述の動作を繰り返し実行させる。これにより、薬液中での全面処理スポンジ41の圧縮および復元と、空気中での全面処理スポンジ41の圧縮および復元とが繰り返し実行される。したがって、全面処理スポンジ41の内部に保持されている異物が確実に除去され、全面処理スポンジ41の清浄度が高められる。そのため、全面処理スポンジ41と基板Wとが接触したときに、全面処理スポンジ41から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止できる。
【0107】
次に、本発明の第2実施形態に係る基板Wの処理の一例について説明する。以下では、図13を参照する。
基板処理装置201で基板Wが処理されるときには、制御装置4が、一枚の基板Wをインデクサロボット6によってキャリアCから搬出させる(S1)。そして、制御装置4は、この基板Wをインデクサロボット6によって測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S2)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3)。すなわち、たとえば汚染されている部分が広い場合には、制御装置4は、全面処理ライン209を選択し、インデクサロボット6によって測定ユニット8から全面処理ライン209に基板Wを搬入させる。一方、汚染されている部分が狭い場合には、制御装置4は、部分処理ライン210を選択し、インデクサロボット6によって測定ユニット8から部分処理ライン210に基板Wを搬送させる。
【0108】
制御装置4が全面処理ライン209を選択した場合には、制御装置4は、インデクサロボット6によって第1薬液供給ステーション213に基板Wを搬入させる。これにより、表面が上に向けられた水平な姿勢で基板Wがスピンチャック260上に載置される。その後、制御装置4は、リンス液ノズル251がスピンチャック260の上方から退避している状態で、スポンジ搬送ロボット221によって全面処理スポンジ41をスポンジ搬送ロボット待機ステーション214から第1薬液供給ステーション213に移動させる。これにより、全面処理スポンジ41が、基板Wの上方に配置される。
【0109】
次に、制御装置4は、全面処理スポンジ41が基板Wの上方に位置している状態で、鉛直伸縮部26を伸長させて、全面処理スポンジ41を水平な姿勢で下降させる。これにより、全面処理スポンジ41の下面41bが、静止状態の基板Wの上面の全域に押し付けられる。そのため、全面処理スポンジ41に吸収されている薬液が染み出て、この薬液が基板Wの上面の全域に供給される(S4)。また、全面処理スポンジ41自体や全面処理スポンジ41に吸収されている薬液が温度調整装置247によって加熱または冷却されているので、全面処理スポンジ41と基板Wとが接触することにより、基板Wが加熱または冷却される。
【0110】
全面処理スポンジ41が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221をライン延伸方向D2に往復させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。また、全面処理スポンジ41が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221によって全面処理スポンジ41を鉛直軸線まわりに回転させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。さらに、制御装置4は、基板Wの上面に対する全面処理スポンジ41の押し付け量をスポンジ搬送ロボット221によって増減させてもよい。すなわち、制御装置4は、基板Wの汚染状態に応じて押し付け量を制御してもよい。
【0111】
第1薬液供給ステーション213で基板Wに薬液が供給された後は、制御装置4は、スポンジ搬送ロボット221によって全面処理スポンジ41をスポンジ搬送ロボット待機ステーション214に退避させる。これにより、第1貯留槽40に貯留されている薬液に全面処理スポンジ41が浸漬され、全面処理スポンジ41に薬液が補充される。そして、スポンジ搬送ロボット221が退避した後は、制御装置4は、スピンチャック260によって基板回転軸線L201まわりに基板Wを回転させる。さらに、制御装置4は、リンス液ノズル251がスピンチャック260の上方に位置しており、カップ255が処理位置に位置している状態で、リンス液バルブ253を開いて、リンス液ノズル251から純水を吐出させる。これにより、基板Wの上面の全域に純水が供給され、基板Wに付着している薬液が純水によって洗い流される(S5)。その後、制御装置4は、リンス液バルブ253を閉じてリンス液ノズル251からの純水の吐出を停止させる。
【0112】
次に、制御装置4は、カップ255を処理位置に位置させている状態で、スピンチャック260によって基板Wを高回転速度で回転させる。基板Wに付着している純水は、基板Wの回転による遠心力によって基板Wの周囲に振り切られる。そして、基板Wの周囲に飛散した純水や、基板Wから落下した純水は、カップ255によって受け止められ、排出配管を通ってカップ255の外に排出される。したがって、基板Wに供給された純水が第1貯留槽40内に進入して、薬液中に純水が混ざることが抑制または防止される。また、基板Wに付着している純水が基板Wの周囲に振り切られることにより、基板Wから純水が除去され、基板Wが乾燥する(S6)。基板Wの乾燥が行われた後は、制御装置4は、カップ昇降機構261によってカップ255を搬入・搬出位置に移動させる。その一方で、制御装置4は、シャッター224を移動させて、開口部223aを開く。そして、制御装置4は、スピンチャック260に保持されている基板Wをインデクサロボット6によって搬出させる。
【0113】
一方、制御装置4が部分処理ライン210を選択した場合には、制御装置4は、インデクサロボット6によって第2薬液供給ステーション215に基板Wを搬入させる。これにより、表面が上に向けられた水平な姿勢で基板Wがスピンチャック260上に載置される。その後、制御装置4は、リンス液ノズル251がスピンチャック260の上方から退避している状態で、スポンジ搬送ロボット221によって部分処理スポンジ49をスポンジ搬送ロボット待機ステーション214から第2薬液供給ステーション215に移動させる。これにより、部分処理スポンジ49が、基板Wの上方に配置される。
【0114】
次に、制御装置4は、部分処理スポンジ49が基板Wの上方に位置している状態で、鉛直伸縮部26を伸長させて、部分処理スポンジ49を水平な姿勢で下降させる。これにより、部分処理スポンジ49の下面49bが、静止状態の基板Wの上面の一部に押し付けられる。そのため、部分処理スポンジ49に吸収されている薬液が染み出て、この薬液が基板Wの上面の一部に供給される(S4)。また、部分処理スポンジ49自体や部分処理スポンジ49に吸収されている薬液が温度調整装置247によって加熱または冷却されているので、部分処理スポンジ49と基板Wとが接触することにより、基板Wが加熱または冷却される。
【0115】
部分処理スポンジ49が基板Wの上面に押し付けられるとき、制御装置4は、基板Wの上面の汚染されている部分と部分処理スポンジ49とが接触するように、測定ユニット8の測定結果に基づいてライン延伸方向D2への部分処理スポンジ49の位置および基板回転軸線L201まわりの基板Wの回転角度を制御する。すなわち、制御装置4は、基板Wの上面において部分処理スポンジ49が接触する部分を測定ユニット8の測定結果に基づいて基板Wごとに設定する。そして、制御装置4は、設定した部分に部分処理スポンジ49が押し付けられるようにスポンジ搬送ロボット221およびスピンチャック260を制御する。これにより、制御装置4によって設定された部分に薬液が供給される。すなわち、基板Wの上面において汚染されている部分に薬液が確実に供給される。
【0116】
部分処理スポンジ49が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221をライン延伸方向D2に往復させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。また、部分処理スポンジ49が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221によって部分処理スポンジ49を回転させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。さらに、制御装置4は、基板Wの上面に対する部分処理スポンジ49の押し付け量をスポンジ搬送ロボット221によって増減させてもよい。すなわち、制御装置4は、基板Wの汚染状態に応じて押し付け量を制御してもよい。
【0117】
第2薬液供給ステーション215で基板Wに薬液が供給された後は、制御装置4は、スポンジ搬送ロボット221によって部分処理スポンジ49を第2薬液供給ステーション215から退避させる。これにより、第1貯留槽40に貯留されている薬液に部分処理スポンジ49が浸漬され、部分処理スポンジ49に薬液が補充される。そして、スポンジ搬送ロボット221が退避した後は、制御装置4は、スピンチャック260によって基板回転軸線L201まわりに基板Wを回転させる。さらに、制御装置4は、リンス液ノズル251がスピンチャック260の上方に位置しており、カップ255が処理位置に位置している状態で、リンス液バルブ253を開いて、リンス液ノズル251から純水を吐出させる。これにより、基板Wの上面の全域に純水が供給され、基板Wに付着している薬液が純水によって洗い流される(S5)。その後、制御装置4は、リンス液バルブ253を閉じて、リンス液ノズル251からの純水の吐出を停止させる。
【0118】
次に、制御装置4は、カップ255を処理位置に位置させている状態で、スピンチャック260によって基板Wを高回転速度で回転させる。基板Wに付着している純水は、基板Wの回転による遠心力によって基板Wの周囲に振り切られる。そして、基板Wの周囲に飛散した純水や、基板Wから落下した純水は、カップ255によって受け止められ、排出配管を通ってカップ255の外に排出される。したがって、基板Wに供給された純水が第1貯留槽40内に進入して、薬液中に純水が混ざることが抑制または防止される。また、基板Wに付着している純水が基板Wの周囲に振り切られることにより、基板Wから純水が除去され、基板Wが乾燥する(S6)。基板Wの乾燥が行われた後は、制御装置4は、カップ昇降機構261によってカップ255を搬入・搬出位置に移動させる。その一方で、制御装置4は、シャッター224を移動させて、開口部223aを開く。そして、制御装置4は、スピンチャック260に保持されている基板Wをインデクサロボット6によって搬出させる。
【0119】
制御装置4は、全面処理ライン209および部分処理ライン210から搬出された基板Wをインデクサロボット6によって再び測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S7)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて基板Wに対する薬液の供給を再び行うか否かを判定する(S8)。
【0120】
具体的には、基板Wが汚染されていない場合(S8でYESの場合)には、制御装置4は、インデクサロボット6によって測定ユニット8からキャリアCに基板Wを搬送させ、この基板Wへの薬液の供給を終了させる(S9)。一方、基板Wが汚染されている場合(S8でNOの場合)には、制御装置4は、全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3に戻る)。そして、全面処理ライン209または部分処理ライン210で、薬液処理、リンス処理、および乾燥処理が実行される(2回目のS4〜6)。その後、制御装置4は、基板Wの汚染状態を測定ユニット8によって測定させる(2回目のS7)。制御装置4は、基板Wの汚染がなくなるまで、このような動作を繰り返し実行させる。
【0121】
この発明の実施の形態の説明は以上であるが、この発明は、前述の第1および第2実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
たとえば、前述の第1および第2実施形態では、循環配管を流れる薬液を加熱および冷却することにより、基板を加熱および冷却する場合について説明した。しかし、貯留槽に貯留されている薬液を加熱および冷却することにより、基板を加熱および冷却してもよい。また、スポンジを直接加熱および冷却してもよいし、基板を直接加熱および冷却してもよい。
【0122】
また、前述の第1および第2実施形態では、基板に付着している液体を遠心力によって振り切って、基板を乾燥させる場合について説明した。しかし、基板に気体を吹き付けることにより、基板に付着している液体を除去して、基板を乾燥させてもよい。
また、前述の第1および第2実施形態では、基板処理装置が、円板状の基板を処理する装置である場合について説明した。しかし、基板処理装置は、液晶表示装置用基板などの多角形の基板を処理する装置であってもよい。
【0123】
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0124】
1 基板処理装置
4 制御装置(接触制御手段、スポンジ選択手段、接触位置設定手段、摺動制御手段、押し付け量制御手段、温度制御手段)
8 測定ユニット(汚染状態測定手段)
11 搬入・搬出ステーション
12 リンス・乾燥ステーション
13 第1薬液供給ステーション(供給ステーション)
15 第2薬液供給ステーション(供給ステーション)
20 搬送路
21 基板搬送ロボット(基板保持手段、接触手段、圧縮手段、摺動手段、押し付け量変更手段、乾燥手段、搬送手段)
40 第1貯留槽(処理液供給手段、洗浄槽)
41 全面処理スポンジ(スポンジ)
41a 全面処理スポンジの上面(第1基板接触面)
41b 全面処理スポンジの下面(第1基板接触面)
42 第1保持部材(スポンジ保持手段)
43 昇降機構(圧縮手段)
44 循環配管
46 フィルタ
47a ヒータ(温度変更手段、加熱手段)
47b クーラ(温度変更手段、冷却手段)
48 第2貯留槽(処理液供給手段、洗浄槽)
49 部分処理スポンジ(スポンジ)
49a 部分処理スポンジの上面(第2基板接触面)
49b 部分処理スポンジの下面(第2基板接触面)
50 第2保持部材(スポンジ保持手段)
51 リンス液ノズル(リンス液供給手段)
56 スポンジ洗浄装置(スポンジ洗浄手段)
201 基板処理装置
221 スポンジ搬送ロボット(接触手段、摺動手段、押し付け量変更手段)
225 スポンジ保持部(スポンジ保持手段)
247 温度調整装置(温度変更手段)
260 スピンチャック(基板保持手段)
【技術分野】
【0001】
この発明は、基板を処理する基板処理装置および基板処理方法に関する。処理対象となる基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、セラミック基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
半導体装置や液晶表示装置などの製造工程では、半導体ウエハや液晶表示装置用ガラス基板などの基板を処理する基板処理装置が用いられる。
複数枚の基板を一括して処理するバッチ式の基板処理装置は、たとえば、薬液が貯留された薬液処理槽と、リンス液が貯留されたリンス処理槽と、これらの処理槽の間で複数枚の基板を一括して搬送する搬送ロボットとを備えている(例えば特許文献1参照)。基板が処理されるときには、複数枚の基板が搬送ロボットによって薬液処理槽およびリンス処理槽に順次搬送される。
【0003】
一方、基板を一枚ずつ処理する枚葉式の基板処理装置は、たとえば、一枚の基板を水平に保持して回転させるスピンチャックと、スピンチャックに保持された基板の上面に向けて処理液を吐出する処理液ノズルとを備えている(例えば特許文献2参照)。基板が処理されるときには、回転状態の基板に向けて処理液ノズルから薬液およびリンス液が順次吐出される。処理液ノズルから吐出された薬液およびリンス液は、基板に供給された後、基板の周囲に飛散する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−190529号公報
【特許文献2】特開2010−177371号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
バッチ式の基板処理装置では、処理される基板の枚数に拘わらず処理槽内に一定量の処理液を貯留する必要がある。したがって、処理液の消費量を低減することが困難である。一方、枚葉式の基板処理装置では、基板に供給された処理液が基板から排出されるから、基板に処理液を供給し続ける必要がある。そのため、処理液の消費量を低減することが困難である。
【0006】
そこで、この発明の目的は、処理液の消費量を低減することができる基板処理装置および基板処理方法を提供することである。
【課題を解決するための手段】
【0007】
前記目的を達成するための請求項1記載の発明は、処理液を吸収可能で弾性変形可能なスポンジ(41、49)と、前記スポンジに処理液を供給する処理液供給手段(40、48)と、基板(W)を保持する基板保持手段(21、260)と、前記スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させて両者を接触させることにより、前記スポンジに吸収されている処理液を前記基板の主面に供給させる接触手段(21、221)とを含む、基板処理装置(1、201)である。基板の主面は、デバイス形成面である表面であってもよいし、表面とは反対側の裏面であってもよい。なお、この項において、括弧内の英数字は、後述の実施形態における対応構成要素の参照符号を表すものであるが、これらの参照符号により特許請求の範囲を限定する趣旨ではない。
【0008】
この構成によれば、接触手段が、処理液供給手段によって処理液が供給されたスポンジと基板保持手段に保持されている基板とを相対移動させて、スポンジと基板の主面とを接触させる。これにより、スポンジが弾性変形して、スポンジに吸収されている処理液が染み出る。そのため、薄い液膜(処理液の液膜)が形成され、この液膜によって基板の主面(主面の一部であってもよいし、全部であってもよい)が覆われる。したがって、基板においてスポンジが接触した部分に処理液を確実に供給することできる。さらに、スポンジと基板との接触により処理液が基板に一瞬で供給されるから、処理液の供給に要する時間を短縮することができる。しかも、基板の主面に供給された処理液は、基板の主面におけるスポンジとの接触部分を覆う必要最低限の量であるから、処理液の消費量を低減することができる。
【0009】
請求項2記載の発明は、前記スポンジは、基板の主面以上の大きさの第1基板接触面(41a,41b)を有する全面処理スポンジ(41)と、基板の主面よりも小さい第2基板接触面(49a、49b)を有する部分処理スポンジ(49)とを含み、前記基板処理装置は、前記接触手段を制御することにより、前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジと前記基板保持手段に保持されている基板の主面とを接触させる接触制御手段(4)をさらに含む、請求項1記載の基板処理装置である。
【0010】
この構成によれば、接触手段が接触制御手段によって制御されることにより、全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジと基板とが接触する。全面処理スポンジは、基板の主面以上の大きさの第1基板接触面を有しているから、接触制御手段が全面処理スポンジと基板とを接触させることにより、基板の主面の全域に処理液を一瞬で供給することができる。一方、部分処理スポンジは、基板の主面よりも小さい第2基板接触面を有しているから、接触制御手段が部分処理スポンジと基板とを接触させることにより、基板の主面の一部に処理液を供給することができる。したがって、処理液の供給が必要でない部分に処理液が供給されることを抑制または防止することができる。
【0011】
基板の主面において部分処理スポンジが接触する部分は、予め定められた部分であってもよいし、基板ごとに設定される部分であってもよい。
基板の主面において部分処理スポンジが接触する部分が基板ごとに設定される場合、請求項3記載の発明のように、前記基板処理装置は、基板の汚染状態を測定する汚染状態測定手段(8)と、前記汚染状態測定手段の測定結果に基づいて前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジを選択するスポンジ選択手段(4)と、前記スポンジ選択手段によって前記部分処理スポンジが選択されたときに、基板の主面において前記部分処理スポンジが接触する部分を、前記汚染状態測定手段の測定結果に基づいて基板ごとに設定する接触位置設定手段(4)とをさらに含み、前記接触制御手段は、前記接触手段を制御することにより、前記接触位置設定手段により設定された部分と前記部分処理スポンジとが接触するように、前記部分処理スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させてもよい。
【0012】
この構成によれば、汚染状態測定手段によって基板の汚染状態が測定される。スポンジ選択手段は、汚染状態測定手段の測定結果に基づいて全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジを選択する。接触位置設定手段は、スポンジ選択手段が部分処理スポンジを選択したときに、基板の主面において部分処理スポンジが接触する部分を汚染状態測定手段の測定結果に基づいて基板ごとに設定する。そして、接触制御手段は、接触手段を制御することにより、接触位置設定手段により設定された部分と部分処理スポンジとを接触させる。したがって、基板の汚染されている部分に部分処理スポンジを確実に接触させて、この部分に処理液を確実に供給することができる。これにより、基板の清浄度を向上させることができる。
【0013】
請求項4記載の発明は、前記スポンジを洗浄するスポンジ洗浄手段(56)をさらに含む、請求項1〜3のいずれか一項に記載の基板処理装置である。
この構成によれば、スポンジ洗浄手段によってスポンジが洗浄される。これにより、スポンジから異物が除去される。そのため、スポンジと基板とが接触したときに、スポンジから基板に異物が移動して、基板が汚染されることを抑制または防止することができる。
【0014】
請求項5記載の発明は、前記スポンジ洗浄手段は、前記スポンジが浸漬される処理液を貯留する洗浄槽(40、48)と、前記洗浄槽に貯留されている処理液に前記スポンジが浸漬されている状態で前記スポンジを保持するスポンジ保持手段(42、50、225)と、前記スポンジ保持手段に保持されている前記スポンジを圧縮させる圧縮手段(21、43)とを含む、請求項4記載の基板処理装置である。
【0015】
この構成によれば、圧縮手段は、スポンジ保持手段に保持されているスポンジを圧縮させることができる。したがって、スポンジは、洗浄槽に貯留されている処理液に浸漬されている状態で圧縮される。圧縮手段が、その後にスポンジの圧縮を解除すると、スポンジはその弾性によって元の形状に膨張して復元する。これにより、スポンジは、その吸収力によって処理液を吸収する。スポンジが圧縮されると、スポンジの表面に付着している異物や、スポンジの内部に保持されている異物が、スポンジに吸収されている処理液と共にスポンジから排出される。これにより、スポンジから異物が除去される。
【0016】
基板処理装置は、圧縮手段を繰り返し作動させてスポンジの圧縮/膨張を繰り返してもよい。すなわち、圧縮手段の作動が繰り返し行われることにより、スポンジの圧縮/膨張が繰り返し行われてもよい。この場合、スポンジによる処理液の吸収および排出が繰り返し行われ、スポンジから異物が確実に除去される。したがって、スポンジと基板とが接触したときに、スポンジから基板に異物が移動して、基板が汚染されることを抑制または防止することができる。
【0017】
請求項6記載の発明は、前記スポンジ洗浄手段は、前記洗浄槽に貯留されている処理液を循環させる循環配管(44)と、前記循環配管を流れる処理液から異物を除去するフィルタ(46)とをさらに含む、請求項5記載の基板処理装置である。
この構成によれば、洗浄槽に貯留されている処理液が、循環配管に排出され、循環配管を通って再び洗浄槽に戻る。これにより、洗浄槽に貯留されている処理液が循環する。循環配管を流れる処理液に含まれる異物は、フィルタによって除去される。したがって、洗浄槽に貯留されている処理液に含まれる異物が、スポンジに付着することを抑制または防止することができる。これにより、スポンジと基板とが接触したときに、スポンジから基板に異物が移動して、基板が汚染されることを抑制または防止することができる。
【0018】
請求項7記載の発明は、前記スポンジと前記基板保持手段に保持されている基板の主面とが接触している状態で前記スポンジと前記基板とを相対移動させて、前記スポンジと前記基板とを摺動させる摺動手段(21、221)をさらに含む、請求項1〜6のいずれか一項に記載の基板処理装置である。
この構成によれば、摺動手段が、スポンジと基板とを摺動させる。これにより、基板の主面に付着している異物がスポンジによって擦り取られる。これにより、基板の清浄度を向上させることができる。
【0019】
スポンジと基板との摺動は、スポンジと基板とが接触するときに毎回行われてもよいし、基板の汚染状態に応じて行われてもよい。具体的には、請求項8記載の発明のように、前記基板処理装置は、基板の汚染状態を測定する汚染状態測定手段(8)と、前記摺動手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記スポンジと前記基板との摺動を制御する摺動制御手段(4)とをさらに含んでいてもよい。
【0020】
この構成によれば、摺動制御手段が、汚染状態測定手段の測定結果に基づいてスポンジと基板との摺動を制御する。すなわち、たとえば基板の汚染度が高い場合、摺動制御手段は、摺動手段によってスポンジと基板とを摺動させる。一方、たとえば基板の汚染度が低い場合、摺動制御手段は、スポンジと基板とを摺動させない。このように、基板の汚染状態に応じてスポンジと基板との摺動が制御されるから、基板の清浄度を安定させることができる。
【0021】
請求項9記載の発明は、基板の汚染状態を測定する汚染状態測定手段(8)と、前記基板保持手段に保持されている基板の主面に対する前記スポンジの押し付け量を変更する押し付け量変更手段(21、221)と、前記押し付け量変更手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記押し付け量を変更する押し付け量制御手段(4)とをさらに含む、請求項1〜8のいずれか一項に記載の基板処理装置である。
【0022】
この構成によれば、押し付け量制御手段が、汚染状態測定手段の測定結果に基づいて基板の主面に対するスポンジの押し付け量を制御する。すなわち、たとえば基板の汚染度が高い場合、押し付け量制御手段は、押し付け量変更手段を制御し、基板の汚染度が低い場合に比べて押し付け量を増加させる。これにより、スポンジから染み出る処理液の量が増加し、基板に供給される処理液の量が増加する。このように、基板の汚染状態に応じて基板の主面に対する処理液の供給量が制御されるから、基板の清浄度を安定させることができる。
【0023】
請求項10記載の発明は、基板の温度を変化させる温度変更手段(47a、47b、247)をさらに含む、請求項1〜9のいずれか一項に記載の基板処理装置である。
この構成によれば、温度変更手段が、基板を加熱および/または冷却することにより、基板の温度を変化させる。これにより、基板が膨張および/または収縮する。また、基板の温度が変化することにより、基板に付着している異物の温度も変化し、この異物が膨張および/または収縮する。したがって、基板および異物の両方が膨張および/または収縮する。基板の膨張率と異物の膨張率が異なる場合、基板および異物が膨張および/または収縮することにより、基板と異物との接触状態が変化し、異物が基板から取れ易くなる。したがって、異物の除去率を向上させることができる。
【0024】
請求項11記載の発明は、前記温度変更手段は、基板を加熱する加熱手段(47a)と、基板を冷却する冷却手段(47b)と、前記加熱手段および冷却手段によって基板の加熱および冷却を交互に実行させる温度制御手段(4)とを含む、請求項10記載の基板処理装置である。
この構成によれば、温度制御手段が加熱手段および冷却手段を制御することにより、基板の加熱および冷却が交互に実行される。したがって、基板の膨張率と異物の膨張率が異なる場合には、基板と異物との接触状態が変化し、異物が基板から取れ易くなる。特に、基板の加熱および冷却が交互に実行されるから、加熱だけまたは冷却だけが実行される場合に比べて、基板の温度差が大きくなる。そのため、異物が基板から一層取れ易くなる。これにより、異物の除去率を向上させることができる。
【0025】
請求項12記載の発明は、基板にリンス液を供給するリンス液供給手段(51)と、基板を乾燥させる乾燥手段(21)と、前記スポンジから基板への処理液の供給が行われる供給ステーション(13、15)と、前記リンス液供給手段から基板へのリンス液の供給および前記乾燥手段による基板の乾燥が行われるリンス・乾燥ステーション(12)と、基板の搬入および搬出が行われる搬入・搬出ステーション(11)とをさらに含み、基板が、前記搬入・搬出ステーションから前記供給ステーションに移動し、その後、前記供給ステーションから前記リンス・乾燥ステーションを通って前記搬入・搬出ステーションに移動するように、前記基板を搬送する搬送手段(21)とをさらに含む、請求項1〜11のいずれか一項に記載の基板処理装置である。
【0026】
この構成によれば、搬送手段が基板を搬送する。搬送手段によって搬送される基板は、搬入・搬出ステーションから供給ステーションに移動する。その後、この基板は、供給ステーションからリンス・乾燥ステーションを通って搬入・搬出ステーションに移動する。搬送手段によって搬送される基板は、供給ステーションでスポンジから供給される処理液によって処理される。また、搬送手段によって搬送される基板は、リンス・乾燥ステーションでリンス液供給手段から供給されるリンス液によって処理される。すなわち、基板に付着している処理液がリンス液によって洗い流される。その後、基板に付着しているリンス液が、リンス・乾燥ステーションで乾燥手段によって除去され、基板が乾燥する。このように、搬送手段が基板を搬送することにより、一連の処理が基板に施される。
【0027】
請求項13記載の発明は、前記基板処理装置は、基板が搬送される搬送路(20)をさらに含み、前記搬入・搬出ステーション、前記リンス・乾燥ステーション、および前記供給ステーションは、この順番で前記搬送路に沿って配置されており、前記搬送手段は、前記搬送路に沿って基板を搬送する、請求項12記載の基板処理装置である。
この構成によれば、搬入・搬出ステーション、リンス・乾燥ステーション、および供給ステーションが、この順番で搬送路に沿って配置されている。搬送手段は、搬送路に沿って基板を搬送する。したがって、搬送手段によって搬送される基板は、搬入・搬出ステーションからリンス・乾燥ステーションを通って供給ステーションに移動する。その後、この基板は、供給ステーションからリンス・乾燥ステーションを通って搬入・搬出ステーションに移動する。すなわち、リンス・乾燥ステーションでリンス処理および乾燥処理が行われた基板は、供給ステーションを通過せずに、リンス・乾燥ステーションから搬入・搬出ステーションに移動する。したがって、供給ステーションに漂う処理液の雰囲気などが基板に付着することを抑制または防止することができる。これにより、基板の清浄度を向上させることができる。
【0028】
請求項14記載の発明は、処理液を吸収可能で弾性変形可能なスポンジ(41、49)に処理液供給手段(40、48)によって処理液を供給し、前記スポンジに処理液を吸収させるステップと、処理液を吸収した前記スポンジと基板保持手段(21、260)に保持されている基板の主面とを接触手段(21、221)によって相対移動させて接触させ、前記スポンジに吸収されている処理液を前記基板の主面に供給させるステップとを含む、基板処理方法である。この構成によれば、請求項1の発明に関して述べた効果と同様な効果を奏することができる。
【図面の簡単な説明】
【0029】
【図1】本発明の第1実施形態に係る基板処理装置のレイアウトを示す模式図である。
【図2】本発明の第1実施形態に係る全面処理ラインの概略構成を示す模式図である。
【図3】本発明の第1実施形態に係る全面処理ラインの概略構成を示す模式図である。
【図4】本発明の第1実施形態に係る基板搬送ロボットの概略構成を示す模式図である。
【図5】本発明の第1実施形態に係る搬入・搬出ステーションの概略構成を示す平面図である。
【図6】本発明の第1実施形態に係る搬入・搬出ステーションの概略構成を示す側面図である。
【図7】本発明の第1実施形態に係る第1薬液供給ステーションの概略構成を示す模式図である。
【図8】本発明の第1実施形態に係る第2薬液供給ステーションの概略構成を示す模式図である。
【図9】本発明の第1実施形態に係るリンス・乾燥ステーションの概略構成を示す模式図である。
【図10】本発明の第1実施形態に係るスポンジ洗浄装置の概略構成を示す模式図である。
【図11】全面処理スポンジが薬液中で圧縮されている状態を示す模式図である。
【図12】全面処理スポンジが空気中で圧縮されている状態を示す模式図である。
【図13】基板の処理の一例について説明するためのフローチャートである。
【図14】本発明の第2実施形態に係る基板処理装置のレイアウトを示す模式図である。
【図15】本発明の第2実施形態に係る全面処理ラインの概略構成を説明するための模式図である。
【図16】本発明の第2実施形態に係る部分処理ラインの概略構成を説明するための模式図である。
【図17】全面処理スポンジが薬液中で圧縮されている状態を示す模式図である。
【図18】全面処理スポンジが空気中で圧縮されている状態を示す模式図である。
【発明を実施するための形態】
【0030】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、本発明の第1実施形態に係る基板処理装置1のレイアウトを示す模式図である。
基板処理装置1は、薬液やリンス液などの処理液によって半導体ウエハ等の円板状の基板Wを一枚ずつ処理する枚葉式の基板処理装置である。基板処理装置1は、基板Wが搬入されるインデクサブロック2と、インデクサブロック2に搬入された基板Wを処理する処理ブロック3と、基板処理装置1に備えられた装置や機器を制御する制御装置4(接触制御手段、スポンジ選択手段、接触位置設定手段、摺動制御手段、押し付け量制御手段、温度制御手段)とを備えている。
【0031】
インデクサブロック2は、複数のキャリアCを保持するキャリア保持部5と、基板Wを搬送するインデクサロボット6と、インデクサロボット6を移動させるIR移動機構7と、基板Wの汚染状態を測定する測定ユニット8(汚染状態測定手段)とを含む。複数のキャリアCは、水平なキャリア配列方向D1に沿って配列された状態でキャリア保持部5に保持されている。各キャリアC内には、デバイス形成面である基板Wの表面が上に向けられた状態で、複数枚の基板Wが水平な姿勢で上下に間隔を空けて保持されている。IR移動機構7は、キャリア配列方向D1にインデクサロボット6を移動させる。インデクサロボット6は、キャリア保持部5に保持されたキャリアCに基板Wを搬入する搬入動作、および基板WをキャリアCから搬出する搬出動作を行う。さらに、インデクサロボット6は、インデクサブロック2内で基板Wを搬送すると共に、インデクサブロック2と処理ブロック203との間で基板Wを搬送する。
【0032】
測定ユニット8は、基板Wに付着しているパーティクルなどの異物の数および基板Wに対する各異物の位置を測定するユニットである。測定ユニット8は、たとえば、パーティクルカウンタ、全反射蛍光X線分析装置(TRXRF)、エネルギー分散型X線分析装置(EDX:Energy Dispersive X−ray spectrometer)、走査型電子顕微鏡(SEM:Scanning Electron Microscope)、および画像認識異物検査装置の少なくとも一つを含む。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて基板Wを処理ブロック3に処理させる。
【0033】
処理ブロック3は、基板Wを一枚ずつ処理する複数(たとえば、4つ)の処理ライン9、10を含む。各処理ライン9、10は、キャリア配列方向D1に直交する水平なライン延伸方向D2に延びている。4つの処理ライン9、10は、基板Wの下面の全域に薬液を供給する2つの全面処理ライン9と、基板Wの下面の一部に薬液を供給する2つの部分処理ライン10とを含む。2つの全面処理ライン9は、上下に重ねられており、2つの部分処理ライン10は、上下に重ねられている。上段の全面処理ライン9と上段の部分処理ライン10とは、同じ高さに配置されており、水平方向に対向している。同様に、下段の全面処理ライン9と下段の部分処理ライン10とは、同じ高さに配置されており、水平方向に対向している。
【0034】
全面処理ライン9は、基板Wの搬入および搬出が行われる搬入・搬出ステーション11と、リンス処理および乾燥処理を行うリンス・乾燥ステーション12と、基板Wの下面の全域に薬液を供給する第1薬液供給ステーション13(供給ステーション)と、後述するスポンジ洗浄ロボット57が待機しているスポンジ洗浄ロボット待機ステーション14とを含む。これらのステーション11、12、13、14は、インデクサブロック2側から搬入・搬出ステーション11、リンス・乾燥ステーション12、第1薬液供給ステーション13、スポンジ洗浄ロボット待機ステーション14の順番でライン延伸方向D2に配列されている。
【0035】
同様に、部分処理ライン10は、搬入・搬出ステーション11と、リンス・乾燥ステーション12と、基板Wの下面の一部に薬液を供給する第2薬液供給ステーション15(供給ステーション)と、スポンジ洗浄ロボット待機ステーション14とを含む。すなわち、部分処理ライン10は、第1薬液供給ステーション13を除き、全面処理ライン9と同様の構成を有している。これらのステーション11、12、15、14は、インデクサブロック2側から搬入・搬出ステーション11、リンス・乾燥ステーション12、第2薬液供給ステーション15、スポンジ洗浄ロボット待機ステーション14の順番でライン延伸方向D2に配列されている。
【0036】
第1薬液供給ステーション13は、基板Wの下面の全域に薬液を供給すると共に、基板Wを加熱する第1加熱ステーション16と、基板Wの下面の全域に薬液を供給すると共に、基板Wを冷却する第1冷却ステーション17とを含む。第1加熱ステーション16および第1冷却ステーション17は、ライン延伸方向D2に配列されている。第1加熱ステーション16は、第1冷却ステーション17よりもリンス・乾燥ステーション12側に配置されている。第1加熱ステーション16と第1冷却ステーション17との順番は逆であってもよい。すなわち、第1冷却ステーション17が、第1加熱ステーション16よりもリンス・乾燥ステーション12側に配置されていてもよい。
【0037】
同様に、第2薬液供給ステーション15は、基板Wの下面の一部に薬液を供給すると共に、基板Wを加熱する第2加熱ステーション18と、基板Wの下面の一部に薬液を供給すると共に、基板Wを冷却する第2冷却ステーション19とを含む。第2加熱ステーション18および第2冷却ステーション19は、ライン延伸方向D2に配列されている。第2加熱ステーション18は、第2冷却ステーション19よりもリンス・乾燥ステーション12側に配置されている。第2加熱ステーション18と第2冷却ステーション19との順番は逆であってもよい。すなわち、第2冷却ステーション19が、第2加熱ステーション18よりもリンス・乾燥ステーション12側に配置されていてもよい。
【0038】
制御装置4は、インデクサロボット6によって各処理ライン9、10の搬入・搬出ステーション11に未処理の基板Wを搬入させる。そして、搬入・搬出ステーション11に搬入された基板Wは、同じ処理ライン9、10内で搬送され、処理される。その後、制御装置4は、各処理ライン9、10で処理された基板Wをインデクサロボット6によって搬入・搬出ステーション11から搬出させる。
【0039】
図2および図3は、本発明の第1実施形態に係る全面処理ライン9の概略構成を示す模式図である。また、図4は、本発明の第1実施形態に係る基板搬送ロボット21の概略構成を示す模式図である。以下では、全面処理ライン9の構成について説明する。部分処理ライン10は、全面処理ライン9と同様の構成を備えているので、その説明を省略する。
図2に示すように、全面処理ライン9は、基板Wが搬送される搬送路20と、搬送路20に沿って基板Wを搬送する基板搬送ロボット21(基板保持手段、接触手段、圧縮手段、摺動手段、押し付け量変更手段、乾燥手段、搬送手段)と、基板搬送ロボット21を収容する密閉された処理ケース22とを含む。搬送路20は、ライン延伸方向D2に延びている。搬入・搬出ステーション11、リンス・乾燥ステーション12、第1薬液供給ステーション13、およびスポンジ洗浄ロボット待機ステーション14は、搬送路20に沿って配置されている。搬入・搬出ステーション11は、処理ケース22の外に設けられており、リンス・乾燥ステーション12、第1薬液供給ステーション13、およびスポンジ洗浄ロボット待機ステーション14は、処理ケース22内に設けられている。処理ケース22は、開口部23aを有する箱形の本体23と、開口部23aを開閉するシャッター24と、開口部23aが開かれる開位置と開口部23aが閉じられる閉位置との間でシャッター24を移動させるシャッター移動機構(図示せず)とを含む。
【0040】
図2および図3に示すように、基板搬送ロボット21は、基板Wを保持する基板保持部25と、鉛直方向に伸縮可能な鉛直伸縮部26と、ライン延伸方向D2に伸縮可能な水平伸縮部27と、鉛直伸縮部26をライン延伸方向D2に移動させる水平移動部28とを含む。基板保持部25は、鉛直伸縮部26の下方で鉛直伸縮部26に支持されており、鉛直伸縮部26は、水平伸縮部27の下方で水平伸縮部27に支持されている。水平伸縮部27は、水平移動部28の下方で水平移動部28に支持されている。水平移動部28は、処理ケース22内でライン延伸方向D2に延びている。水平移動部28は、基板保持部25、鉛直伸縮部26、および水平伸縮部27を処理ケース22内で一体的に移動させる。
【0041】
さらに、図4に示すように、基板搬送ロボット21は、吸引力を発生する吸引機構29と、鉛直伸縮部26を鉛直方向に伸縮させる昇降機構30と、基板保持部25に保持されている基板Wの中心を通り鉛直方向に延びる基板回転軸線L1まわりに基板保持部25を回転させる回転機構31とを含む。吸引機構29の吸引力は、基板保持部25に伝達される。基板保持部25は、吸引機構29からの吸引力によって基板Wの上面(裏面)を吸引することにより、基板保持部25の下方で基板Wを水平に保持する。基板保持部25が基板Wを保持している状態で昇降機構30が鉛直伸縮部26を伸縮させると、基板Wが水平な姿勢で昇降する。さらに、基板保持部25が基板Wを保持している状態で回転機構31が基板保持部25を回転させると、基板回転軸線L1まわりに基板Wが回転する。
【0042】
基板保持部25に保持されている基板Wは、水平移動部28が、基板保持部25、鉛直伸縮部26、および水平伸縮部27を移動させることにより処理ケース22内でライン延伸方向D2に搬送される。すなわち、基板保持部25に保持されている基板Wは、リンス・乾燥ステーション12と薬液供給ステーション13、15との間で搬送される。また、基板保持部25に保持されている基板Wは、水平伸縮部27の伸縮によって処理ケース22の中と処理ケース22の外との間で搬送される。
【0043】
具体的には、図2に示すように、搬入・搬出ステーション11は、基板Wを支持する基板支持部材32を含む。基板支持部材32は、搬送路20よりも下方で基板Wを支持する。インデクサロボット6は、基板支持部材32に基板Wを搬入し、基板支持部材32から基板Wを搬出する。図3に示すように、処理ケース22の外から中に基板Wが搬送される場合には、基板保持部25、鉛直伸縮部26、および水平伸縮部27が処理ケース22内において開口部23aの近傍に配置されており、開口部23aが開かれている状態で、水平伸縮部27がライン延伸方向D2に伸長する。これにより、基板保持部25および鉛直伸縮部26が、開口部23aを通って処理ケース22の外に移動する。そして、基板支持部材32に支持されている基板Wの上方に基板保持部25が位置するように、基板保持部25および鉛直伸縮部26が処理ケース22の外に配置される。この状態で、基板保持部25が基板Wの上面に接する位置まで鉛直伸縮部26が伸長する。これにより、基板支持部材32に支持されている基板Wが基板保持部25に保持される。基板Wが基板保持部25に保持された後は、鉛直伸縮部26が収縮することにより、搬送路20に対応する高さまで基板Wが上昇する。その後、水平収縮部が収縮することにより、基板保持部25に保持されている基板Wが開口部23aを通じて処理ケース22内に搬送される。そして、開口部がシャッター24によって密閉される。このようにして、処理ケース22の外から中に基板Wが搬送される。
【0044】
一方、処理ケース22の中から外に基板Wが搬送されるときは、前述の一連の動作と同様の動作が行われる。すなわち、基板保持部25、鉛直伸縮部26、および水平伸縮部27が処理ケース22内において開口部23aの近傍に配置されており、開口部23aが開かれている状態で、水平伸縮部27がライン延伸方向D2に伸長する。これにより、基板保持部25に保持されている基板Wが、開口部23aを通って処理ケース22の外に搬送される。そして、基板保持部25に保持されている基板Wが基板支持部材32の上方に位置するように、基板保持部25および鉛直伸縮部26が処理ケース22の外に配置される。この状態で、基板保持部25に保持されている基板Wの下面(表面)の周縁部が基板支持部材32に接する位置まで、鉛直伸縮部26が伸長する。これにより、基板保持部25に保持されている基板Wが基板支持部材32に支持される。その後、鉛直伸縮部26および水平伸縮部27が順に収縮することにより、基板保持部25および鉛直伸縮部26が処理ケース22内に退避する。そして、開口部23aがシャッター24によって密閉される。このようにして、処理ケース22の中から外に基板Wが搬送される。
【0045】
図5は、本発明の第1実施形態に係る搬入・搬出ステーション11の概略構成を示す平面図である。図6は、本発明の第1実施形態に係る搬入・搬出ステーション11の概略構成を示す側面図である。
搬入・搬出ステーション11は、基板Wを支持する基板支持部材32と、基板Wの表裏を反転させる反転機構33とを含む。反転機構33は、一対の挟持部材34と、開閉機構35と、昇降機構36と、回転機構37とを含む。一対の挟持部材34は、水平方向に対向している。挟持部材34は、一対の挟持部38を含む。一方の挟持部材34に設けられた一対の挟持部38は、他方の挟持部材34側に開いた溝39を有している。一対の挟持部38は、一対の挟持部材34が対向する方向に直交する水平な方向に間隔を空けて配置されている。挟持部材34は、水平方向および鉛直方向に移動可能であり、一対の挟持部材34が対向する方向に延びる水平な反転軸線L2まわりに回転可能である。
【0046】
開閉機構35は、開位置と、開位置に位置しているときよりも一対の挟持部材34の間隔が小さい閉位置との間で一対の挟持部材34を水平方向に移動させる。昇降機構36は、基板支持部材32と一対の挟持部材34との間での基板Wの受け渡しが行われる受け渡し高さと、一対の挟持部材34によって保持された基板Wが反転される反転高さ(図5に示す位置)との間で、一対の挟持部材34を同期させながら鉛直方向に移動させる。回転機構37は、一対の挟持部材34を同期させながら、一対の挟持部材34を反転軸線L2まわりに180度回転させる。
【0047】
基板Wの表裏が反転される場合には、基板支持部材32に基板Wが支持されており、一対の挟持部材34が受け渡し高さに配置されている状態で、開閉機構35が、一対の挟持部材34を開位置から閉位置に移動させる。これにより、基板Wの周縁部が各挟持部38の溝39に入り込み、基板Wが一対の挟持部材34によって挟持される。そして、一対の挟持部材34によって基板Wが保持されている状態で、昇降機構36が、一対の挟持部材34を受け渡し高さから反転高さに移動させる。その後、回転機構37が一対の挟持部材34を反転軸線L2まわりに180度回転させる。これにより、基板Wの表裏が反転される。
【0048】
基板Wの表裏が反転された後は、一対の挟持部材34に保持されている基板Wの下面の周縁部が基板支持部材32に接する高さ(受け渡し高さ)まで、昇降機構36が一対の挟持部材34を下降させる。その後、開閉機構35が、一対の挟持部材34を閉位置から開位置に移動させる。これにより、各挟持部38が基板Wから離れて、一対の挟持部材34による基板Wの保持が解除される。すなわち、一対の挟持部材34から基板支持部材32に基板Wが渡され、基板支持部材32だけで基板Wが支持される。その後、昇降機構36が一対の挟持部材34を上昇させて基板支持部材32から退避させる。
【0049】
図7は、本発明の第1実施形態に係る第1薬液供給ステーション13の概略構成を示す模式図である。図8は、本発明の第1実施形態に係る第2薬液供給ステーション15の概略構成を示す模式図である。
図7に示すように、第1薬液供給ステーション13の第1加熱ステーション16は、薬液を貯留している第1貯留槽40(処理液供給手段、洗浄槽)と、第1貯留槽40に貯留されている薬液に浸漬されている全面処理スポンジ41(スポンジ)と、全面処理スポンジ41を保持する第1保持部材42(スポンジ保持手段)と、第1保持部材42を鉛直方向に昇降させる昇降機構43と、第1貯留槽40に貯留されている薬液を循環させる循環配管44と、循環配管44に介装されたポンプ45およびフィルタ46と、循環配管44を流れる薬液を加熱するヒータ47a(温度変更手段、加熱手段)とを含む。また、第1薬液供給ステーション13の第1冷却ステーション17は、第1貯留槽40と、全面処理スポンジ41と、第1保持部材42と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、循環配管44を流れる薬液を冷却するクーラ47b(温度変更手段、冷却手段)とを含む。すなわち、第1冷却ステーション17は、ヒータ47aの代わりにクーラ47bを備えており、ヒータ47a以外は第1加熱ステーション16と同様の構成を備えている。
【0050】
また、図8に示すように、第2薬液供給ステーション15の第2加熱ステーション18は、第2貯留槽48(処理液供給手段、洗浄槽)と、部分処理スポンジ49(スポンジ)と、第2保持部材50(スポンジ保持手段)と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、ヒータ47aとを含む。また、第2薬液供給ステーション15の第2冷却ステーション19は、第2貯留槽48と、部分処理スポンジ49と、第2保持部材50と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、クーラ47bとを含む。すなわち、第2冷却ステーション19は、ヒータ47aの代わりにクーラ47bを備えており、ヒータ47a以外は第2加熱ステーション18と同様の構成を備えている。また、第1薬液供給ステーション13に設けられた第1貯留槽40と第2薬液供給ステーション15に設けられた第2貯留槽48の相違点は、大きさであり、第2貯留槽48の方が第1貯留槽40よりも大きい。同様に、第1保持部材42と第2保持部材50の相違点は、大きさであり、第2保持部材50の方が第1保持部材42よりも大きい。また、全面処理スポンジ41と部分処理スポンジ49との相違点は、大きさであり、部分処理スポンジ49の方が、全面処理スポンジ41よりも小さい。
【0051】
このように、第2薬液供給ステーション15は、第1薬液供給ステーション13と同様の構成を備えているから、以下では、第1薬液供給ステーション13について主として説明する。第2薬液供給ステーション15については、第1薬液供給ステーション13と異なる点についてのみ説明する。
図7に示すように、第1貯留槽40は、基板Wよりも大きい上向きに開いた開口部を有している。第1保持部材42は、薬液中に配置されている。図7と図8とを比較すると分かるように、第2貯留槽48の開口部は、第1貯留槽40の開口部よりも大きい。また、第2保持部材50は、第2貯留槽48の開口部に対応する大きさを有しており、薬液中に配置されている。図7に示すように、第1保持部材42は、流体が第1保持部材42を通って上下に移動できるように構成された網状の部材である。第1保持部材42は、薬液の液面の下方に配置されている。第1保持部材42は、第1貯留槽40に対して鉛直方向に移動可能である。後述するように全面処理スポンジ41が洗浄されるときには、昇降機構43が第1保持部材42を昇降させる。
【0052】
図7に示すように、全面処理スポンジ41は、その一部が薬液に浸かっている処理位置で第1保持部材42によって下から支持されている。処理位置では、全面処理スポンジ41の上面41a(第1基板接触面)は、薬液の液面よりも上方に配置されており、全面処理スポンジ41の下面41bは、薬液中に配置されている。全面処理スポンジ41は、液体を吸収可能で弾性変形可能な多孔質材料によって形成されている。多孔質材料は、たとえば、PVA(ポリビニルアルコール)、PP(ポリプロピレン)、およびPE(ポリエチレン)の少なくとも一つを含む。全面処理スポンジ41の上面41aおよび下面41bは、たとえば、基板Wの直径以上の直径を有する円形の水平面である。第1実施形態では、全面処理スポンジ41の上面41aが第1基板接触面として機能する。すなわち、基板Wが全面処理スポンジ41の上方に位置している状態で、鉛直伸縮部26が伸長すると、基板搬送ロボット21に保持されている基板Wの下面の全域が、全面処理スポンジ41の上面41aに押し付けられる。これにより、全面処理スポンジ41に吸収されている薬液が染み出て、基板Wの下面の全域に薬液が供給される。
【0053】
また、図8に示すように、部分処理スポンジ49は、その一部が薬液に浸かっている処理位置で第2保持部材50によって下から支持されている。処理位置では、部分処理スポンジ49の上面49a(第2基板接触面)は、薬液の液面よりも上方に配置されており、部分処理スポンジ49の下面49bは、薬液中に配置されている。部分処理スポンジ49は、液体を吸収可能で弾性変形可能な多孔質材料によって形成されている。部分処理スポンジ49の上面49aおよび下面49bは、たとえば、基板Wの上面および下面よりも小さい水平面である。第1実施形態では、部分処理スポンジ49の上面49aが第2基板接触面として機能する。すなわち、基板Wが部分処理スポンジ49の上方に位置している状態で、鉛直伸縮部26が伸長すると、基板搬送ロボット21に保持されている基板Wの下面の一部が、部分処理スポンジ49の上面49aに押し付けられる。これにより、部分処理スポンジ49に吸収されている薬液が染み出て、基板Wの下面の一部に薬液が供給される。制御装置4は、水平移動部28および回転機構31(図3および図4参照)を制御して、ライン延伸方向D2への基板Wの位置および基板回転軸線L1まわりの基板Wの回転角度を変更することにより、基板Wの下面内の任意の部分と部分処理スポンジ49とを接触させる。
【0054】
また、図7に示すように、循環配管44は、第1保持部材42よりも下方で第1貯留槽40に接続されている上流端44aおよび下流端44bを含む。第1貯留槽40に貯留されている薬液は、ポンプ45の吸引力によって上流端44aから循環配管44内に流れ込む。そして、循環配管44内に流れ込んだ薬液は、フィルタ46を通過した後、下流端44bから第1貯留槽40に戻る。このようにして、第1貯留槽40に貯留されている薬液が循環する。薬液がフィルタ46を通過することにより、薬液に含まれるパーティクルなどの異物が除去される。また、第1加熱ステーション16では、ヒータ47aが循環配管44に取り付けられており、第1冷却ステーション17では、クーラ47bが循環配管44に取り付けられている。したがって、薬液が循環配管44を流れることにより、この薬液が加熱または冷却される。ヒータ47aおよびクーラ47bの温度は、制御装置4によって制御される。
【0055】
循環配管44を流れる薬液が加熱されることにより、第1貯留槽40に貯留されている薬液の温度が上がる。したがって、全面処理スポンジ41自体や全面処理スポンジ41に吸収されている薬液の温度も上がる。そのため、基板Wが第1加熱ステーション16で全面処理スポンジ41に押し付けられることにより、基板Wが加熱される。一方、循環配管44を流れる薬液が冷却されることにより、第1貯留槽40に貯留されている薬液の温度が下がる。したがって、全面処理スポンジ41自体や全面処理スポンジ41に吸収されている薬液の温度も下がる。そのため、基板Wが第1冷却ステーション17で全面処理スポンジ41に押し付けられることにより、基板Wが冷却される。このように、基板Wが全面処理スポンジ41に押し付けられることにより、基板Wが加熱または冷却され、基板Wの温度が変化する。
【0056】
図9は、本発明の第1実施形態に係るリンス・乾燥ステーション12の概略構成を示す模式図である。
リンス・乾燥ステーション12は、基板搬送ロボット21に保持されている基板Wの下面に向けてリンス液の一例である純水(脱イオン水)を吐出するリンス液ノズル51(リンス液供給手段)と、リンス液ノズル51に純水を供給するリンス液配管52と、リンス液配管52に介装されたリンス液バルブ53と、リンス液ノズル51を水平方向に移動させるノズル移動機構54と、基板Wから排出された液体を受け止めるカップ55と、カップ55内に溜まった液体をカップ55の外に排出する排出配管(図示せず)とを含む。カップ55は、有底筒状である。カップ55は、基板Wよりも大きい上向きに開いた開口部を有している。リンス液ノズル51およびノズル移動機構54は、カップ55内に配置されている。基板搬送ロボット21に保持されている基板Wは、基板Wがカップ55の上方に位置している状態で鉛直伸縮部26が伸長することにより、カップ55内に搬送される。また、基板Wがカップ55内に位置している状態で、鉛直伸縮部26が収縮することにより、基板Wがカップ55の外に搬送される。
【0057】
基板Wに純水が供給されるときには、基板Wがカップ55内に位置している状態で、制御装置4が、回転機構31(図4参照)を制御することにより、基板回転軸線L1まわりに基板Wを回転させる。そして、制御装置4は、リンス液バルブ53を開くことにより、基板Wを回転させながら、リンス液ノズル51から基板Wの下面に向けて純水を吐出させる。さらに、この状態で、制御装置4は、ノズル移動機構54を制御することにより、リンス液ノズル51を水平方向に移動させる。これにより、基板Wに対する純水の供給位置が、基板Wの下面中央部と基板Wの下面周縁部との間で移動する。したがって、基板Wの下面が純水によって走査され、基板Wの下面の全域に純水が供給される。
【0058】
純水が基板Wに供給された後は、制御装置4が基板Wを乾燥させる。具体的には、制御装置4が、ノズル移動機構54を制御することにより、リンス液ノズル51の移動を停止させる。さらに、制御装置4は、リンス液バルブ53を閉じることにより、リンス液ノズル51からの純水の吐出を停止させる。そして、基板Wがカップ55内に位置している状態で、制御装置4が、回転機構31を制御することにより、基板回転軸線L1まわりに高回転速度(たとえば、数千rpm)で基板Wを回転させる。これにより、基板Wに付着している純水に大きな遠心力が加わり、基板Wに付着している純水が基板Wの周囲に振り切られる。このようにして、基板Wから純水が除去され、基板Wが乾燥する。また、基板Wの周囲に飛散した純水や、基板Wから落下した純水は、カップ55によって受け止められ、排出配管を通ってカップ55の外に排出される。
【0059】
図10は、本発明の第1実施形態に係るスポンジ洗浄装置56の概略構成を示す模式図である。図11は、全面処理スポンジ41が薬液中で圧縮されている状態を示す模式図である。図12は、全面処理スポンジ41が空気中で圧縮されている状態を示す模式図である。
図10に示すように、全面処理ライン9は、全面処理スポンジ41を洗浄するスポンジ洗浄装置56(スポンジ洗浄手段)をさらに備えている。スポンジ洗浄装置56は、洗浄槽としての第1貯留槽40と、第1保持部材42と、昇降機構43と、循環配管44と、フィルタ46と、全面処理スポンジ41を圧縮するスポンジ洗浄ロボット57とを含む。昇降機構43は、処理位置(実線で示す位置)の下方に設けられた洗浄位置(一点鎖線で示す位置)と、処理位置の上方に設けられた絞り位置(二点鎖線で示す位置)との間で第1保持部材42を移動させる。洗浄位置は、全面処理スポンジ41の全体が薬液に浸かっている位置であり、絞り位置は、全面処理スポンジ41の全体が薬液に浸かっていない位置である。図示はしないが、部分処理ライン10も、全面処理ライン9と同様に、部分処理スポンジ49を洗浄するスポンジ洗浄装置56を備えている。部分処理ライン10に設けられたスポンジ洗浄装置56の構成は、全面処理ライン9に設けられたスポンジ洗浄装置56の構成と同様であるので、以下では、全面処理ライン9に設けられたスポンジ洗浄装置56の構成について説明する。
【0060】
図10に示すように、スポンジ洗浄ロボット57は、基板搬送ロボット21と同様の構成を有している。すなわち、スポンジ洗浄ロボット57は、プレート58と、プレート保持部59と、鉛直伸縮部26と、水平移動部28とを含む。さらに、図示はしないが、スポンジ洗浄ロボット57は、昇降機構30および回転機構31(図4参照)を含む。プレート58は、プレート保持部59の下方でプレート保持部59によって水平に保持されている。プレート保持部59は、鉛直伸縮部26の下方で鉛直伸縮部26によって保持されている。鉛直伸縮部26は、水平移動部28の下方で水平移動部28によって支持されている。水平移動部28は、第1薬液供給ステーション13とスポンジ洗浄ロボット待機ステーション14との間で、スポンジ洗浄ロボット57をライン延伸方向D2に移動させる。これにより、スポンジ洗浄ロボット57が、全面処理スポンジ41の上方に配置される。
【0061】
全面処理スポンジ41が洗浄されるときには、制御装置4が、昇降機構43によって第1保持部材42を洗浄位置に移動させる。そして、制御装置4は、スポンジ洗浄ロボット57が全面処理スポンジ41の上方に位置しており、全面処理スポンジ41の全体が薬液に浸かっている状態で、スポンジ洗浄ロボット57の鉛直伸縮部26を伸長させて、スポンジ洗浄ロボット57のプレート58を水平な姿勢で下降させる。これにより、図11に示すように、全面処理スポンジ41が、プレート58と第1保持部材42とによって上下に挟まれて、全面処理スポンジ41が薬液中で圧縮される。そのため、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、この異物は、薬液と共に循環配管44を流れることにより、フィルタ46によって捕獲される。全面処理スポンジ41が圧縮された後は、制御装置4は、スポンジ洗浄ロボット57の鉛直伸縮部26を収縮させて、スポンジ洗浄ロボット57のプレート58を水平な姿勢で上昇させる。これにより、プレート58が全面処理スポンジ41から離れ、全面処理スポンジ41が元の形状に復元する。そのため、全面処理スポンジ41が薬液を吸収する。
【0062】
次に、制御装置4は、昇降機構43によって第1保持部材42を絞り位置に移動させる。これにより、全面処理スポンジ41が、薬液の液面よりも上方に移動し、第1貯留槽40に貯留されている薬液から離れる。そして、制御装置4は、全面処理スポンジ41の全体が薬液に浸かっていない状態で、スポンジ洗浄ロボット57の鉛直伸縮部26を伸長させて、スポンジ洗浄ロボット57のプレート58を水平な姿勢で下降させる。これにより、図12に示すように、全面処理スポンジ41が、プレート58と第1保持部材42とによって上下に挟まれて、全面処理スポンジ41が空気中で圧縮される。すなわち、全面処理スポンジ41が絞られ、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、全面処理スポンジ41から押し出された異物および薬液は、第1貯留槽40に落下し、循環配管44を流れる。
【0063】
制御装置4は、スポンジ洗浄ロボット57等にこのような動作を繰り返し実行させることにより全面処理スポンジ41を洗浄させる。すなわち、制御装置4は、薬液中で全面処理スポンジ41を圧縮および復元させると共に、空気中で全面処理スポンジ41を圧縮および復元させる。このように、薬液中での全面処理スポンジ41の圧縮および復元と、空気中での全面処理スポンジ41の圧縮および復元とが繰り返し実行されることにより、全面処理スポンジ41の内部に保持されている異物が確実に除去され、全面処理スポンジ41の清浄度が高められる。したがって、基板Wと全面処理スポンジ41とが接触したときに、全面処理スポンジ41から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止できる。
【0064】
図13は、本発明の第1実施形態に係る基板Wの処理の一例について説明するためのフローチャートである。
基板処理装置1で基板Wが処理されるときには、制御装置4が、一枚の基板Wをインデクサロボット6によってキャリアCから搬出させる(S1)。そして、制御装置4は、この基板Wをインデクサロボット6によって測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S2)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3)。すなわち、たとえば汚染されている部分が広い場合には、制御装置4は、全面処理ライン9を選択し、インデクサロボット6によって測定ユニット8から全面処理ライン9に基板Wを搬入させる。一方、汚染されている部分が狭い場合には、制御装置4は、部分処理ライン10を選択し、インデクサロボット6によって測定ユニット8から部分処理ライン10に基板Wを搬送させる。
【0065】
制御装置4が全面処理ライン9を選択した場合には、制御装置4は、インデクサロボット6によって全面処理ライン9の搬入・搬出ステーション11に基板Wを搬入させる。すなわち、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。搬入・搬出ステーション11に基板Wが搬入された後は、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、裏面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。その後、制御装置4は、基板支持部材32に支持されている基板Wを基板搬送ロボット21によって保持させ、基板搬送ロボット21によって搬入・搬出ステーション11から第1薬液供給ステーション13に基板Wを移動させる。そして、制御装置4は、基板搬送ロボット21に保持されている基板Wの下面(表面)を全面処理スポンジ41に押し付けさせる。
【0066】
具体的には、制御装置4は、基板搬送ロボット21によって基板Wを第1加熱ステーション16に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第1加熱ステーション16の全面処理スポンジ41に押し付けさせる。これにより、基板Wの下面の全域に薬液が供給されると共に、基板Wが加熱される。基板Wの下面が第1加熱ステーション16の全面処理スポンジ41に押し付けられた後は、制御装置4は、基板搬送ロボット21によって基板Wを第1冷却ステーション17に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第1冷却ステーション17の全面処理スポンジ41に押し付けさせる。これにより、基板Wの下面の全域に薬液が供給されると共に、基板Wが冷却される。
【0067】
制御装置4は、第1薬液供給ステーション13でこのような動作を基板搬送ロボット21に繰り返し実行させる。これにより、基板Wの下面の全域に薬液が供給されると共に、基板Wの加熱および冷却が交互に複数回実行される(S4)。
第1加熱ステーション16および第1冷却ステーション17のいずれのステーションにおいても、制御装置4は、全面処理スポンジ41と基板Wの下面とが接触している状態で全面処理スポンジ41と基板Wとが相対移動するように基板搬送ロボット21を制御して、基板Wの汚染状態に応じて全面処理スポンジ41と基板Wとを摺動させてもよい。
【0068】
具体的には、制御装置4は、全面処理スポンジ41と基板Wとが接触している状態で、基板搬送ロボット21をライン延伸方向D2に往復させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。また、制御装置4は、全面処理スポンジ41と基板Wとが接触している状態で、基板搬送ロボット21によって基板Wを回転させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。
【0069】
また、第1加熱ステーション16および第1冷却ステーション17のいずれのステーションにおいても、制御装置4は、測定ユニット8の測定結果に基づいて基板Wの下面に対する全面処理スポンジ41の押し付け量を変更してもよい。すなわち、基板Wの下面に対する全面処理スポンジ41の押し付け量が増加すると、全面処理スポンジ41から染み出る薬液の量も増加する。したがって、たとえば基板Wの汚染度が高い場合には、制御装置4は、基板Wの汚染度が低い場合に比べて押し付け量が増加するように基板搬送ロボット21を制御して、基板Wに対する薬液の供給量を増加させてもよい。
【0070】
第1薬液供給ステーション13で基板Wに薬液が供給された後は、制御装置4は、基板搬送ロボット21によって第1薬液供給ステーション13からリンス・乾燥ステーション12に基板Wを移動させる。そして、制御装置4は、基板Wの下面の全域に純水を供給させることにより、基板Wの下面に付着している薬液を洗い流す(S5)。その後、制御装置4は、基板搬送ロボット21によって基板Wを高回転速度で回転させることにより、基板Wに付着している純水を除去させる。これにより、基板Wが乾燥する(S6)。基板Wが乾燥した後は、制御装置4は、基板搬送ロボット21によってリンス・乾燥ステーション12から搬入・搬出ステーション11に基板Wを移動させる。その後、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。そして、制御装置4は、インデクサロボット6によって基板支持部材32上に載置されている基板Wを搬出させる。
【0071】
一方、制御装置4が部分処理ライン10を選択した場合には、制御装置4は、インデクサロボット6によって部分処理ライン10の搬入・搬出ステーション11に基板Wを搬入させる。すなわち、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。搬入・搬出ステーション11に基板Wが搬入された後は、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、裏面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。その後、制御装置4は、基板支持部材32に支持されている基板Wを基板搬送ロボット21によって保持させ、基板搬送ロボット21によって搬入・搬出ステーション11から第2薬液供給ステーション15に基板Wを移動させる。そして、制御装置4は、基板搬送ロボット21に保持されている基板Wの下面(表面)を部分処理スポンジ49に押し付けさせる。
【0072】
具体的には、制御装置4は、基板搬送ロボット21によって基板Wを第2加熱ステーション18に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第2加熱ステーション18の部分処理スポンジ49に押し付けさせる。これにより、基板Wの下面の一部に薬液が供給されると共に、基板Wが加熱される。基板Wの下面が第2加熱ステーション18の部分処理スポンジ49に押し付けられた後は、制御装置4は、基板搬送ロボット21によって基板Wを第2冷却ステーション19に移動させる。そして、制御装置4は、基板搬送ロボット21によって基板Wの下面を第2冷却ステーション19の部分処理スポンジ49に押し付けさせる。これにより、基板Wの下面の一部に薬液が供給されると共に、基板Wが冷却される。制御装置4は、このような動作を基板搬送ロボット21に繰り返し実行させる。
【0073】
第2加熱ステーション18および第2冷却ステーション19のいずれのステーションにおいても、制御装置4は、基板Wの下面の汚染されている部分と部分処理スポンジ49とが接触するように、測定ユニット8の測定結果に基づいてライン延伸方向D2への基板Wの位置および基板回転軸線L1まわりの基板Wの回転角度を制御する。すなわち、制御装置4は、基板Wの下面において部分処理スポンジ49が接触する部分を測定ユニット8の測定結果に基づいて基板Wごとに設定する。そして、制御装置4は、設定した部分と部分処理スポンジ49とが接触するように基板搬送ロボット21を制御する。これにより、制御装置4によって設定された部分に薬液が供給される。すなわち、基板Wの下面において汚染されている部分に薬液が確実に供給される。
【0074】
制御装置4は、第2薬液供給ステーション15でこのような動作を基板搬送ロボット21に繰り返し実行させる。これにより、基板Wの下面の一部に薬液が供給されると共に、基板Wの加熱および冷却が交互に複数回実行される(S4)。
第2加熱ステーション18および第2冷却ステーション19のいずれのステーションにおいても、制御装置4は、部分処理スポンジ49と基板Wとが接触している状態で、基板搬送ロボット21をライン延伸方向D2に往復させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。また、制御装置4は、部分処理スポンジ49と基板Wとが接触している状態で、基板搬送ロボット21によって基板Wを回転させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。さらに、制御装置4は、基板Wの汚染状態に応じて基板Wの下面に対する部分処理スポンジ49の押し付け量を制御してもよい。
【0075】
第2薬液供給ステーション15で基板Wに薬液が供給された後は、制御装置4は、基板搬送ロボット21によって第1薬液供給ステーション13からリンス・乾燥ステーション12に基板Wを移動させる。そして、制御装置4は、基板Wの下面の全域に純水を供給させることにより、基板Wの下面に付着している薬液を洗い流す(S5)。その後、制御装置4は、基板搬送ロボット21によって基板Wを高回転速度で回転させることにより、基板Wに付着している純水を除去させる。これにより、基板Wが乾燥する(S6)。基板Wが乾燥した後は、制御装置4は、基板搬送ロボット21によってリンス・乾燥ステーション12から搬入・搬出ステーション11に基板Wを移動させる。その後、制御装置4は、反転機構33によって基板Wの表裏を反転させる。これにより、表面が上に向けられた水平な姿勢で基板Wが基板支持部材32上に載置される。そして、制御装置4は、インデクサロボット6によって基板支持部材32上に載置されている基板Wを搬出させる。
【0076】
制御装置4は、全面処理ライン9および部分処理ライン10から搬出された基板Wをインデクサロボット6によって再び測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S7)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて基板Wに対する薬液の供給を再び行うか否かを判定する(S8)。
【0077】
具体的には、基板Wが汚染されていない場合(S8でYESの場合)には、制御装置4は、インデクサロボット6によって測定ユニット8からキャリアCに基板Wを搬送させ、この基板Wへの薬液の供給を終了させる(S9)。一方、基板Wが汚染されている場合(S8でNOの場合)には、制御装置4は、全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3に戻る)。そして、全面処理ライン209または部分処理ライン210で、薬液処理、リンス処理、および乾燥処理が実行される(2回目のS4〜6)。その後、制御装置4は、基板Wの汚染状態を測定ユニット8によって測定させる(2回目のS8)。制御装置4は、基板Wの汚染がなくなるまで、このような動作を繰り返し実行させる。
【0078】
以上のように第1実施形態では、基板搬送ロボット21が、貯留槽40、48によって薬液が供給されたスポンジ41、49と基板搬送ロボット21に保持されている基板Wとを相対移動させて、スポンジ41、49と基板Wの下面とを接触させる。これにより、スポンジ41、49が弾性変形して、スポンジ41、49に吸収されている薬液が染み出る。そのため、薄い液膜(薬液の液膜)が形成され、この液膜によって基板Wの下面が覆われる。したがって、基板Wにおいてスポンジ41、49が接触した部分に薬液を確実に供給することできる。さらに、スポンジ41、49と基板Wとの接触により薬液が基板Wに一瞬で供給されるから、薬液の供給に要する時間を短縮することができる。しかも、この基板Wの下面に供給された薬液は、基板Wの下面におけるスポンジ41、49との接触部分を覆う必要最低限の量であるから、薬液の消費量を低減することができる。
【0079】
さらに、スポンジ41、49と基板Wとが接触すると、基板Wの下面におけるスポンジ41、49との接触部分に薬液が均一に供給される。したがって、処理の均一性が向上する。しかも、基板Wに供給された薬液が少量であるから、基板Wに供給された薬液が基板Wに沿って流れることを抑制または防止することができる。すなわち、基板Wに供給された薬液は基板Wに留まる。たとえば、薬液が基板Wに沿って流動すると、薬液が流動している部分と流動していない部分とで処理に差が生じる場合がある。したがって、薬液の流動を抑制または防止することにより、処理の均一性をさらに向上させることができる。さらに、薬液が基板Wに留まるから、薬液の処理能力が十分に発揮される。すなわち、たとえば基板Wに供給された薬液が基板Wからすぐに排出されると、基板Wを処理する能力を有している状態で薬液が基板Wから離れる。したがって、薬液の流動を抑制または防止することにより、薬液を効率的に使用することができる。
【0080】
また第1実施形態では、基板搬送ロボット21が制御装置4によって制御されることにより、全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジと基板Wとが接触する。全面処理スポンジ41は、基板Wの下面以上の大きさの第1基板接触面(全面処理スポンジ41の上面41a)を有しているから、制御装置4が全面処理スポンジ41と基板Wとを接触させることにより、基板Wの下面の全域に薬液を一瞬で供給することができる。一方、部分処理スポンジ49は、基板Wの下面よりも小さい第2基板接触面(部分処理スポンジ49の上面49a)を有しているから、制御装置4が部分処理スポンジ49と基板Wとを接触させることにより、基板Wの下面の一部に薬液を供給することができる。したがって、薬液の供給が必要でない部分に薬液が供給されることを抑制または防止することができる。
【0081】
また第1実施形態では、測定ユニット8によって基板Wの汚染状態が測定される。制御装置4は、測定ユニット8の測定結果に基づいて全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する。制御装置4は、部分処理スポンジ49を選択したときに、基板Wの下面において部分処理スポンジ49が接触する部分を測定ユニット8の測定結果に基づいて基板Wごとに設定する。そして、制御装置4は、設定した部分と部分処理スポンジ49とが接触するように基板搬送ロボット21を制御する。したがって、基板Wの汚染されている部分に部分処理スポンジ49を確実に接触させて、この部分に薬液を確実に供給することができる。これにより、基板Wの清浄度を向上させることができる。
【0082】
また第1実施形態では、基板搬送ロボット21が、貯留槽40、48に貯留されている薬液にスポンジ41、49が浸漬されている状態でスポンジ41、49を圧縮する。その後、基板搬送ロボット21によるスポンジ41、49の圧縮が解除され、スポンジ41、49がその弾性によって元の形状に膨張して復元する。このようなスポンジ41、49の圧縮/膨張が繰り返し行われる。スポンジ41、49が圧縮されると、スポンジ41、49の表面に付着している異物や、スポンジ41、49の内部に保持されている異物が、薬液と共にスポンジ41、49から排出される。これにより、スポンジ41、49から異物が除去される。また、スポンジ41、49が膨張すると、スポンジ41、49は、その吸収力によって薬液を吸収する。したがって、スポンジ41、49の圧縮/膨張が繰り返し行われることにより、スポンジ41、49による薬液の吸収および排出が繰り返し行われ、スポンジ41、49から異物が確実に除去される。これにより、スポンジ41、49と基板Wとが接触したときに、スポンジ41、49から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止することができる。
【0083】
また第1実施形態では、スポンジ洗浄装置56が、貯留槽40、48に接続された循環配管44と、循環配管44に介装されたフィルタ46とを含む。貯留槽40、48に貯留されている薬液は、循環配管44に排出され、循環配管44を通って再び貯留槽40、48に戻る。これにより、貯留槽40、48に貯留されている薬液が循環する。循環配管44を流れる薬液に含まれる異物は、フィルタ46によって除去される。したがって、貯留槽40、48に貯留されている薬液に含まれる異物が、スポンジ41、49に付着することを抑制または防止することができる。これにより、スポンジ41、49と基板Wとが接触したときに、スポンジ41、49から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止することができる。
【0084】
また第1実施形態では、基板搬送ロボット21が、スポンジ41、49と基板Wとを摺動させる。具体的には、スポンジ41、49と基板Wとが接触している状態で、基板搬送ロボット21の水平移動部28が、スポンジ41、49をライン延伸方向D2に往復させることにより、スポンジ41、49と基板Wとを摺動させる。また、スポンジ41、49と基板Wとが接触している状態で、基板搬送ロボット21が、基板Wを回転させることにより、スポンジ41、49と基板Wとを摺動させる。これにより、基板Wの下面に付着している異物がスポンジ41、49によって擦り取られる。これにより、基板Wの清浄度を向上させることができる。
【0085】
また第1実施形態では、制御装置4が、測定ユニット8の測定結果に基づいてスポンジ41、49と基板Wとの摺動を制御する。すなわち、たとえば基板Wの汚染度が高い場合、制御装置4は、基板搬送ロボット21によってスポンジ41、49と基板Wとを摺動させる。一方、たとえば基板Wの汚染度が低い場合、制御装置4は、スポンジ41、49と基板Wとを摺動させない。このように、基板Wの汚染状態に応じてスポンジ41、49と基板Wとの摺動が制御されるから、基板Wの清浄度を安定させることができる。
【0086】
また第1実施形態では、制御装置4が、測定ユニット8の測定結果に基づいて基板Wの下面に対するスポンジ41、49の押し付け量を制御する。すなわち、たとえば基板Wの汚染度が高い場合、制御装置4は、基板搬送ロボット21を制御し、基板Wの汚染度が低い場合に比べて押し付け量を増加させる。これにより、スポンジ41、49から染み出る薬液の量が増加し、基板Wに供給される薬液の量が増加する。このように、基板Wの汚染状態に応じて基板Wの下面に対する薬液の供給量が制御されるから、基板Wの清浄度を安定させることができる。
【0087】
また第1実施形態では、ヒータ47aおよびクーラ47bによって基板Wが加熱および冷却される。これにより、基板Wの温度が変化し、基板Wが膨張および収縮する。また、基板Wが加熱および冷却されることにより、基板Wに付着している異物の温度が変化し、この異物が膨張および収縮する。したがって、基板Wおよび異物の両方が膨張および収縮する。基板Wの膨張率と異物の膨張率が異なる場合、基板Wおよび異物が膨張および収縮することにより、基板Wと異物との接触状態が変化し、異物が基板Wから取れ易くなる。特に、基板Wの加熱および冷却が交互に実行されるから、加熱だけまたは冷却だけが実行される場合に比べて、基板Wの温度差が大きくなる。そのため、異物が基板Wから一層取れ易くなる。これにより、異物の除去率を向上させることができる。
【0088】
また第1実施形態では、基板搬送ロボット21が基板Wを搬送する。基板搬送ロボット21によって搬送される基板Wは、搬入・搬出ステーション11から供給ステーション13、15に移動する。その後、この基板Wは、供給ステーション13、15リンス・乾燥ステーション12を通ってから搬入・搬出ステーション11に移動する。基板搬送ロボット21によって搬送される基板Wは、供給ステーション13、15でスポンジ41、49から供給される薬液によって処理される。また、基板搬送ロボット21によって搬送される基板Wは、リンス・乾燥ステーション12でリンス液ノズル51から供給される純水によって処理される。すなわち、基板Wに付着している薬液が純水によって洗い流される。その後、基板搬送ロボット21がリンス・乾燥ステーション12で基板Wを回転させることにより、基板Wに付着している純水が除去される。これにより、基板Wが乾燥する。このように、基板搬送ロボット21が基板Wを搬送することにより、一連の処理が基板Wに施される。
【0089】
また第1実施形態では、搬入・搬出ステーション11、リンス・乾燥ステーション12、および供給ステーション13、15は、この順番で搬送路20に沿って配置されている。基板搬送ロボット21は、搬送路20に沿って基板Wを搬送する。したがって、基板搬送ロボット21によって搬送される基板Wは、搬入・搬出ステーション11からリンス・乾燥ステーション12を通って供給ステーション13、15に移動する。その後、この基板Wは、供給ステーション13、15からリンス・乾燥ステーション12を通って搬入・搬出ステーション11に移動する。すなわち、リンス・乾燥ステーション12でリンス処理および乾燥処理が行われた基板Wは、供給ステーション13、15を通過せずに、リンス・乾燥ステーション12から搬入・搬出ステーション11に移動する。したがって、供給ステーション13、15に漂う薬液の雰囲気などが基板Wに付着することを抑制または防止することができる。これにより、基板Wの清浄度を向上させることができる。
【0090】
次に、この発明の第2実施形態について説明する。この第2実施形態と前述の第1実施形態との主要な相違点は、搬送される対象が異なることである。すなわち、第1実施形態では、基板Wが搬送されることにより、スポンジ41、49と基板Wとが接触するのに対し、第2実施形態では、スポンジ41、49が搬送されることにより、スポンジ41、49と基板Wとが接触する。以下の図14〜図18において、前述の図1〜図13に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0091】
図14は、本発明の第2実施形態に係る基板処理装置201のレイアウトを示す模式図である。
基板処理装置201は、枚葉式の基板処理装置である。基板処理装置201は、インデクサブロック2と、インデクサブロック2に搬入された基板Wを処理する処理ブロック203と、基板処理装置201に備えられた装置や機器を制御する制御装置4とを備えている。
【0092】
インデクサブロック2は、キャリア保持部5と、インデクサロボット6と、IR移動機構7と、測定ユニット8とを含む。インデクサロボット6は、インデクサブロック2内で基板Wを搬送すると共に、インデクサブロック2と処理ブロック203との間で基板Wを搬送する。
処理ブロック203は、基板Wを一枚ずつ処理する複数(たとえば、4つ)の処理ライン209、210を含む。各処理ライン209、210は、ライン延伸方向D2に延びている。4つの処理ライン209、210は、基板Wの上面の全域に薬液を供給する2つの全面処理ライン209と、基板Wの上面の一部に薬液を供給する2つの部分処理ライン210とを含む。2つの全面処理ライン209は、上下に重ねられており、2つの部分処理ライン210は、上下に重ねられている。上段の全面処理ライン209と上段の部分処理ライン210とは、同じ高さに配置されており、水平方向に対向している。同様に、下段の全面処理ライン209と下段の部分処理ライン210とは、同じ高さに配置されており、水平方向に対向している。
【0093】
全面処理ライン209は、基板Wの上面の全域に薬液を供給する第1薬液供給ステーション213と、後述するスポンジ搬送ロボット221(接触手段、押し付け量変更手段)が待機しているスポンジ搬送ロボット待機ステーション214とを含む。これらのステーション213、214は、インデクサブロック2側から第1薬液供給ステーション213、スポンジ搬送ロボット待機ステーション214の順番でライン延伸方向D2に配列されている。同様に、部分処理ライン210は、基板Wの上面の一部に薬液を供給する第2薬液供給ステーション215と、スポンジ搬送ロボット待機ステーション214とを含む。これらのステーション215、214は、インデクサブロック2側から第2薬液供給ステーション215、スポンジ搬送ロボット待機ステーション214の順番でライン延伸方向D2に配列されている。部分処理ライン210は、スポンジを除き、全面処理ライン209と同様の構成を有している。すなわち、全面処理ライン209は、基板Wの上面の全域に薬液を供給する全面処理スポンジ41を備えており、部分処理ライン210は、基板Wの上面の一部に薬液を供給する部分処理スポンジ49を備えている。
【0094】
図15は、本発明の第2実施形態に係る全面処理ライン209の概略構成を説明するための模式図である。図16は、本発明の第2実施形態に係る部分処理ライン210の概略構成を説明するための模式図である。
前述のように、部分処理ライン210は、全面処理ライン209と同様の構成を備えている。したがって、以下では、全面処理ライン209について主として説明する。部分処理ライン210については、全面処理ライン209と異なる点についてのみ説明する。
【0095】
図15に示すように、全面処理ライン209は、密閉された処理ケース222を含む。第1薬液供給ステーション213およびスポンジ搬送ロボット待機ステーション214は、処理ケース222内に設けられている。第1薬液供給ステーション213は、インデクサブロック2側に配置されている。処理ケース222は、開口部223aを有する箱形の本体223と、開口部223aを開閉するシャッター224と、開口部223aが開かれる開位置と開口部223aが閉じられる閉位置との間でシャッター224を移動させるシャッター移動機構(図示せず)とを含む。開口部223aは、インデクサブロック2に面しており、インデクサロボット6がアクセス可能な位置に配置されている。
【0096】
図15に示すように、第1薬液供給ステーション213は、基板Wを水平に保持するスピンチャック260(基板保持手段)と、スピンチャック260に保持されている基板Wの上面に向けてリンス液の一例である純水を吐出するリンス液ノズル251と、リンス液ノズル251に純水を供給するリンス液配管252と、リンス液配管252に介装されたリンス液バルブ253と、リンス液ノズル251を水平方向に移動させるノズル移動機構254と、基板Wから排出された液体を受け止めるカップ255と、カップ255を昇降させるカップ昇降機構261と、カップ255内に溜まった液体をカップ255の外に排出する排出配管(図示せず)とを含む。
【0097】
スピンチャック260は、基板Wを水平に保持して当該基板Wの中心を通る鉛直な基板回転軸線L201まわりに回転可能な円盤状のスピンベース262と、スピンベース262を基板回転軸線L201まわりに回転させるスピンモータ263とを含む。スピンチャック260は、基板Wを水平方向に挟んで当該基板Wを水平に保持する挟持式のチャックであってもよいし、非デバイス形成面である基板Wの裏面(下面)を吸着することにより当該基板Wを水平に保持するバキューム式のチャックであってもよい。第2実施形態では、スピンチャック260は、たとえばバキューム式のチャックである。
【0098】
スピンチャック260は、有底円筒状のカップ255内に収容されている。カップ昇降機構261は、カップ255の上端がスピンチャック260による基板Wの保持位置よりも下方に位置する搬入・搬出位置(実線で示す位置)と、カップ255の上端がスピンチャック260による基板Wの保持位置よりも上方に位置する処理位置(二点鎖線で示す位置)との間でカップ255を昇降させる。処理ケース222の外から中に基板Wが搬送されるときには、開口部223aが開かれており、カップ255が搬入・搬出位置に配置されている状態で、インデクサロボット6が、ハンドHを処理ケース222内に移動させ、基板Wをスピンチャック260上に載置させる。処理ケース222の中から外に基板Wが搬送されるときも同様に、開口部223aが開かれており、カップ255が搬入・搬出位置に配置されている状態で、インデクサロボット6が、スピンチャック260上に載置されている基板WをハンドHによって保持し、この基板Wを処理ケース222の外に移動させる。
【0099】
図15に示すように、全面処理ライン209のスポンジ搬送ロボット待機ステーション214は、第1貯留槽40と、全面処理スポンジ41と、第1保持部材42と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、温度調整装置247(温度変更手段)とを含む。さらに、スポンジ搬送ロボット待機ステーション214は、第1薬液供給ステーション213とスポンジ搬送ロボット待機ステーション214との間で全面処理スポンジ41を搬送するスポンジ搬送ロボット221を含む。温度調整装置247は、ヒータであってもよいし、クーラであってもよい。
【0100】
同様に、図16に示すように、部分処理ライン210のスポンジ搬送ロボット待機ステーション214は、第1貯留槽40と、部分処理スポンジ49と、第1保持部材42と、昇降機構43と、循環配管44と、ポンプ45と、フィルタ46と、温度調整装置247とを含む。さらに、スポンジ搬送ロボット待機ステーション214は、第2薬液供給ステーション215とスポンジ搬送ロボット待機ステーション214との間で部分処理スポンジ49を搬送するスポンジ搬送ロボット221を含む。
【0101】
図15に示すように、スポンジ搬送ロボット221は、スポンジ保持部225(スポンジ保持手段)と、鉛直伸縮部26と、水平移動部28とを含む。図示はしないが、スポンジ搬送ロボット221は、鉛直伸縮部26を鉛直方向に伸縮させる昇降機構30と、スポンジ保持部225を鉛直軸線まわりに回転させる回転機構31とをさらに含む(図4参照)。スポンジ保持部225は、鉛直伸縮部26の下方で鉛直伸縮部26に支持されている。鉛直伸縮部26は、水平移動部28の下方で水平移動部28に支持されている。全面処理スポンジ41は、スポンジ保持部225の下方でスポンジ保持部225に保持されている。また、図16に示すように、部分処理スポンジ49は、スポンジ保持部225の下方でスポンジ保持部225に保持されている。
【0102】
図15に示すように、全面処理スポンジ41は、第1貯留槽40に貯留されている薬液に浸漬されており、基板Wに薬液が供給されるときに、スポンジ搬送ロボット221によって第1薬液供給ステーション213に搬送される。同様に、図16に示すように、部分処理スポンジ49は、第1貯留槽40に貯留されている薬液に浸漬されており、基板Wに薬液が供給されるときに、スポンジ搬送ロボット221によって第2薬液供給ステーション215に搬送される。第2実施形態では、全面処理スポンジ41の下面41bが第1基板接触面として機能し、部分処理スポンジ49の下面49bが第2基板接触面として機能する。
【0103】
図17は、全面処理スポンジ41が薬液中で圧縮されている状態を示す模式図である。図18は、全面処理スポンジ41が空気中で圧縮されている状態を示す模式図である。以下では、全面処理スポンジ41が洗浄されるときの動作の一例について説明する。部分処理スポンジ49が洗浄されるときの動作については、全面処理スポンジ41が洗浄されるときと同様であるので、その説明を省略する。以下では、図15、図17、および図18を参照する。
【0104】
全面処理スポンジ41が洗浄されるときには、制御装置4が、昇降機構43によって第1保持部材42を洗浄位置(図17に示す位置)に移動させる。そして、制御装置4は、第1保持部材42が洗浄位置に位置しており、スポンジ搬送ロボット221が第1貯留槽40の上方に位置している状態で、スポンジ搬送ロボット221の鉛直伸縮部26を伸長させて、全面処理スポンジ41を水平な姿勢で下降させる。これにより、全面処理スポンジ41の全体が薬液に浸かると共に、全面処理スポンジ41が、スポンジ搬送ロボット221と第1保持部材42とによって上下に挟まれて、全面処理スポンジ41が薬液中で圧縮される。そのため、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、この異物は、薬液と共に循環配管44を流れることにより、フィルタ46によって捕獲される。全面処理スポンジ41が圧縮された後は、制御装置4は、スポンジ搬送ロボット221の鉛直伸縮部26を収縮させて、全面処理スポンジ41を水平な姿勢で上昇させる。これにより、全面処理スポンジ41が、薬液の液面よりも上方に移動し、第1貯留槽40に貯留されている薬液から離れる。また、全面処理スポンジ41は、上昇している間に元の形状に復元し、第1貯留槽40に貯留されている薬液を吸収する。
【0105】
次に、制御装置4は、昇降機構43によって第1保持部材42を絞り位置(図18に示す位置)に移動させる。これにより、第1保持部材42が、薬液の液面よりも上方に移動し、第1貯留槽40に貯留されている薬液から離れる。また、第1保持部材42が絞り位置に移動することにより、第1保持部材42が全面処理スポンジ41に近づき、全面処理スポンジ41が、スポンジ搬送ロボット221と第1保持部材42とによって上下に挟まれて空気中で圧縮される。これにより、全面処理スポンジ41が絞られ、全面処理スポンジ41の内部に保持されている異物が、薬液と共に全面処理スポンジ41から押し出される。そして、全面処理スポンジ41から押し出された異物および薬液は、第1貯留槽40に落下し、循環配管44を流れる。第1保持部材42が絞り位置に移動した後は、制御装置4は、第1保持部材42を再び洗浄位置に移動させる。第1保持部材42が洗浄位置に移動することにより、第1保持部材42が全面処理スポンジ41から離れ、全面処理スポンジ41が元の形状に復元する。
【0106】
このように、第2実施形態では、昇降機構43が第1保持部材42を移動させることにより、全面処理スポンジ41が圧縮される。すなわち、第2実施形態では、昇降機構43が圧縮手段として機能する。制御装置4は、スポンジ搬送ロボット221等に前述の動作を繰り返し実行させる。これにより、薬液中での全面処理スポンジ41の圧縮および復元と、空気中での全面処理スポンジ41の圧縮および復元とが繰り返し実行される。したがって、全面処理スポンジ41の内部に保持されている異物が確実に除去され、全面処理スポンジ41の清浄度が高められる。そのため、全面処理スポンジ41と基板Wとが接触したときに、全面処理スポンジ41から基板Wに異物が移動して、基板Wが汚染されることを抑制または防止できる。
【0107】
次に、本発明の第2実施形態に係る基板Wの処理の一例について説明する。以下では、図13を参照する。
基板処理装置201で基板Wが処理されるときには、制御装置4が、一枚の基板Wをインデクサロボット6によってキャリアCから搬出させる(S1)。そして、制御装置4は、この基板Wをインデクサロボット6によって測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S2)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3)。すなわち、たとえば汚染されている部分が広い場合には、制御装置4は、全面処理ライン209を選択し、インデクサロボット6によって測定ユニット8から全面処理ライン209に基板Wを搬入させる。一方、汚染されている部分が狭い場合には、制御装置4は、部分処理ライン210を選択し、インデクサロボット6によって測定ユニット8から部分処理ライン210に基板Wを搬送させる。
【0108】
制御装置4が全面処理ライン209を選択した場合には、制御装置4は、インデクサロボット6によって第1薬液供給ステーション213に基板Wを搬入させる。これにより、表面が上に向けられた水平な姿勢で基板Wがスピンチャック260上に載置される。その後、制御装置4は、リンス液ノズル251がスピンチャック260の上方から退避している状態で、スポンジ搬送ロボット221によって全面処理スポンジ41をスポンジ搬送ロボット待機ステーション214から第1薬液供給ステーション213に移動させる。これにより、全面処理スポンジ41が、基板Wの上方に配置される。
【0109】
次に、制御装置4は、全面処理スポンジ41が基板Wの上方に位置している状態で、鉛直伸縮部26を伸長させて、全面処理スポンジ41を水平な姿勢で下降させる。これにより、全面処理スポンジ41の下面41bが、静止状態の基板Wの上面の全域に押し付けられる。そのため、全面処理スポンジ41に吸収されている薬液が染み出て、この薬液が基板Wの上面の全域に供給される(S4)。また、全面処理スポンジ41自体や全面処理スポンジ41に吸収されている薬液が温度調整装置247によって加熱または冷却されているので、全面処理スポンジ41と基板Wとが接触することにより、基板Wが加熱または冷却される。
【0110】
全面処理スポンジ41が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221をライン延伸方向D2に往復させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。また、全面処理スポンジ41が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221によって全面処理スポンジ41を鉛直軸線まわりに回転させることにより、全面処理スポンジ41と基板Wとを摺動させてもよい。さらに、制御装置4は、基板Wの上面に対する全面処理スポンジ41の押し付け量をスポンジ搬送ロボット221によって増減させてもよい。すなわち、制御装置4は、基板Wの汚染状態に応じて押し付け量を制御してもよい。
【0111】
第1薬液供給ステーション213で基板Wに薬液が供給された後は、制御装置4は、スポンジ搬送ロボット221によって全面処理スポンジ41をスポンジ搬送ロボット待機ステーション214に退避させる。これにより、第1貯留槽40に貯留されている薬液に全面処理スポンジ41が浸漬され、全面処理スポンジ41に薬液が補充される。そして、スポンジ搬送ロボット221が退避した後は、制御装置4は、スピンチャック260によって基板回転軸線L201まわりに基板Wを回転させる。さらに、制御装置4は、リンス液ノズル251がスピンチャック260の上方に位置しており、カップ255が処理位置に位置している状態で、リンス液バルブ253を開いて、リンス液ノズル251から純水を吐出させる。これにより、基板Wの上面の全域に純水が供給され、基板Wに付着している薬液が純水によって洗い流される(S5)。その後、制御装置4は、リンス液バルブ253を閉じてリンス液ノズル251からの純水の吐出を停止させる。
【0112】
次に、制御装置4は、カップ255を処理位置に位置させている状態で、スピンチャック260によって基板Wを高回転速度で回転させる。基板Wに付着している純水は、基板Wの回転による遠心力によって基板Wの周囲に振り切られる。そして、基板Wの周囲に飛散した純水や、基板Wから落下した純水は、カップ255によって受け止められ、排出配管を通ってカップ255の外に排出される。したがって、基板Wに供給された純水が第1貯留槽40内に進入して、薬液中に純水が混ざることが抑制または防止される。また、基板Wに付着している純水が基板Wの周囲に振り切られることにより、基板Wから純水が除去され、基板Wが乾燥する(S6)。基板Wの乾燥が行われた後は、制御装置4は、カップ昇降機構261によってカップ255を搬入・搬出位置に移動させる。その一方で、制御装置4は、シャッター224を移動させて、開口部223aを開く。そして、制御装置4は、スピンチャック260に保持されている基板Wをインデクサロボット6によって搬出させる。
【0113】
一方、制御装置4が部分処理ライン210を選択した場合には、制御装置4は、インデクサロボット6によって第2薬液供給ステーション215に基板Wを搬入させる。これにより、表面が上に向けられた水平な姿勢で基板Wがスピンチャック260上に載置される。その後、制御装置4は、リンス液ノズル251がスピンチャック260の上方から退避している状態で、スポンジ搬送ロボット221によって部分処理スポンジ49をスポンジ搬送ロボット待機ステーション214から第2薬液供給ステーション215に移動させる。これにより、部分処理スポンジ49が、基板Wの上方に配置される。
【0114】
次に、制御装置4は、部分処理スポンジ49が基板Wの上方に位置している状態で、鉛直伸縮部26を伸長させて、部分処理スポンジ49を水平な姿勢で下降させる。これにより、部分処理スポンジ49の下面49bが、静止状態の基板Wの上面の一部に押し付けられる。そのため、部分処理スポンジ49に吸収されている薬液が染み出て、この薬液が基板Wの上面の一部に供給される(S4)。また、部分処理スポンジ49自体や部分処理スポンジ49に吸収されている薬液が温度調整装置247によって加熱または冷却されているので、部分処理スポンジ49と基板Wとが接触することにより、基板Wが加熱または冷却される。
【0115】
部分処理スポンジ49が基板Wの上面に押し付けられるとき、制御装置4は、基板Wの上面の汚染されている部分と部分処理スポンジ49とが接触するように、測定ユニット8の測定結果に基づいてライン延伸方向D2への部分処理スポンジ49の位置および基板回転軸線L201まわりの基板Wの回転角度を制御する。すなわち、制御装置4は、基板Wの上面において部分処理スポンジ49が接触する部分を測定ユニット8の測定結果に基づいて基板Wごとに設定する。そして、制御装置4は、設定した部分に部分処理スポンジ49が押し付けられるようにスポンジ搬送ロボット221およびスピンチャック260を制御する。これにより、制御装置4によって設定された部分に薬液が供給される。すなわち、基板Wの上面において汚染されている部分に薬液が確実に供給される。
【0116】
部分処理スポンジ49が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221をライン延伸方向D2に往復させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。また、部分処理スポンジ49が基板Wに押し付けられている間、制御装置4は、スポンジ搬送ロボット221によって部分処理スポンジ49を回転させることにより、部分処理スポンジ49と基板Wとを摺動させてもよい。さらに、制御装置4は、基板Wの上面に対する部分処理スポンジ49の押し付け量をスポンジ搬送ロボット221によって増減させてもよい。すなわち、制御装置4は、基板Wの汚染状態に応じて押し付け量を制御してもよい。
【0117】
第2薬液供給ステーション215で基板Wに薬液が供給された後は、制御装置4は、スポンジ搬送ロボット221によって部分処理スポンジ49を第2薬液供給ステーション215から退避させる。これにより、第1貯留槽40に貯留されている薬液に部分処理スポンジ49が浸漬され、部分処理スポンジ49に薬液が補充される。そして、スポンジ搬送ロボット221が退避した後は、制御装置4は、スピンチャック260によって基板回転軸線L201まわりに基板Wを回転させる。さらに、制御装置4は、リンス液ノズル251がスピンチャック260の上方に位置しており、カップ255が処理位置に位置している状態で、リンス液バルブ253を開いて、リンス液ノズル251から純水を吐出させる。これにより、基板Wの上面の全域に純水が供給され、基板Wに付着している薬液が純水によって洗い流される(S5)。その後、制御装置4は、リンス液バルブ253を閉じて、リンス液ノズル251からの純水の吐出を停止させる。
【0118】
次に、制御装置4は、カップ255を処理位置に位置させている状態で、スピンチャック260によって基板Wを高回転速度で回転させる。基板Wに付着している純水は、基板Wの回転による遠心力によって基板Wの周囲に振り切られる。そして、基板Wの周囲に飛散した純水や、基板Wから落下した純水は、カップ255によって受け止められ、排出配管を通ってカップ255の外に排出される。したがって、基板Wに供給された純水が第1貯留槽40内に進入して、薬液中に純水が混ざることが抑制または防止される。また、基板Wに付着している純水が基板Wの周囲に振り切られることにより、基板Wから純水が除去され、基板Wが乾燥する(S6)。基板Wの乾燥が行われた後は、制御装置4は、カップ昇降機構261によってカップ255を搬入・搬出位置に移動させる。その一方で、制御装置4は、シャッター224を移動させて、開口部223aを開く。そして、制御装置4は、スピンチャック260に保持されている基板Wをインデクサロボット6によって搬出させる。
【0119】
制御装置4は、全面処理ライン209および部分処理ライン210から搬出された基板Wをインデクサロボット6によって再び測定ユニット8に搬送させる。これにより、表面が上に向けられた水平な姿勢で基板Wが測定ユニット8に搬入され、基板Wの表面の汚染状態が測定ユニット8によって測定される(S7)。制御装置4は、測定ユニット8の測定結果を取得し、この測定結果に基づいて基板Wに対する薬液の供給を再び行うか否かを判定する(S8)。
【0120】
具体的には、基板Wが汚染されていない場合(S8でYESの場合)には、制御装置4は、インデクサロボット6によって測定ユニット8からキャリアCに基板Wを搬送させ、この基板Wへの薬液の供給を終了させる(S9)。一方、基板Wが汚染されている場合(S8でNOの場合)には、制御装置4は、全面処理スポンジ41および部分処理スポンジ49のうちのいずれか一方のスポンジを選択する(S3に戻る)。そして、全面処理ライン209または部分処理ライン210で、薬液処理、リンス処理、および乾燥処理が実行される(2回目のS4〜6)。その後、制御装置4は、基板Wの汚染状態を測定ユニット8によって測定させる(2回目のS7)。制御装置4は、基板Wの汚染がなくなるまで、このような動作を繰り返し実行させる。
【0121】
この発明の実施の形態の説明は以上であるが、この発明は、前述の第1および第2実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
たとえば、前述の第1および第2実施形態では、循環配管を流れる薬液を加熱および冷却することにより、基板を加熱および冷却する場合について説明した。しかし、貯留槽に貯留されている薬液を加熱および冷却することにより、基板を加熱および冷却してもよい。また、スポンジを直接加熱および冷却してもよいし、基板を直接加熱および冷却してもよい。
【0122】
また、前述の第1および第2実施形態では、基板に付着している液体を遠心力によって振り切って、基板を乾燥させる場合について説明した。しかし、基板に気体を吹き付けることにより、基板に付着している液体を除去して、基板を乾燥させてもよい。
また、前述の第1および第2実施形態では、基板処理装置が、円板状の基板を処理する装置である場合について説明した。しかし、基板処理装置は、液晶表示装置用基板などの多角形の基板を処理する装置であってもよい。
【0123】
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0124】
1 基板処理装置
4 制御装置(接触制御手段、スポンジ選択手段、接触位置設定手段、摺動制御手段、押し付け量制御手段、温度制御手段)
8 測定ユニット(汚染状態測定手段)
11 搬入・搬出ステーション
12 リンス・乾燥ステーション
13 第1薬液供給ステーション(供給ステーション)
15 第2薬液供給ステーション(供給ステーション)
20 搬送路
21 基板搬送ロボット(基板保持手段、接触手段、圧縮手段、摺動手段、押し付け量変更手段、乾燥手段、搬送手段)
40 第1貯留槽(処理液供給手段、洗浄槽)
41 全面処理スポンジ(スポンジ)
41a 全面処理スポンジの上面(第1基板接触面)
41b 全面処理スポンジの下面(第1基板接触面)
42 第1保持部材(スポンジ保持手段)
43 昇降機構(圧縮手段)
44 循環配管
46 フィルタ
47a ヒータ(温度変更手段、加熱手段)
47b クーラ(温度変更手段、冷却手段)
48 第2貯留槽(処理液供給手段、洗浄槽)
49 部分処理スポンジ(スポンジ)
49a 部分処理スポンジの上面(第2基板接触面)
49b 部分処理スポンジの下面(第2基板接触面)
50 第2保持部材(スポンジ保持手段)
51 リンス液ノズル(リンス液供給手段)
56 スポンジ洗浄装置(スポンジ洗浄手段)
201 基板処理装置
221 スポンジ搬送ロボット(接触手段、摺動手段、押し付け量変更手段)
225 スポンジ保持部(スポンジ保持手段)
247 温度調整装置(温度変更手段)
260 スピンチャック(基板保持手段)
【特許請求の範囲】
【請求項1】
処理液を吸収可能で弾性変形可能なスポンジと、
前記スポンジに処理液を供給する処理液供給手段と、
基板を保持する基板保持手段と、
前記スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させて両者を接触させることにより、前記スポンジに吸収されている処理液を前記基板の主面に供給させる接触手段とを含む、基板処理装置。
【請求項2】
前記スポンジは、基板の主面以上の大きさの第1基板接触面を有する全面処理スポンジと、基板の主面よりも小さい第2基板接触面を有する部分処理スポンジとを含み、
前記基板処理装置は、前記接触手段を制御することにより、前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジと前記基板保持手段に保持されている基板の主面とを接触させる接触制御手段をさらに含む、請求項1記載の基板処理装置。
【請求項3】
前記基板処理装置は、
基板の汚染状態を測定する汚染状態測定手段と、
前記汚染状態測定手段の測定結果に基づいて前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジを選択するスポンジ選択手段と、
前記スポンジ選択手段によって前記部分処理スポンジが選択されたときに、基板の主面において前記部分処理スポンジが接触する部分を、前記汚染状態測定手段の測定結果に基づいて基板ごとに設定する接触位置設定手段とをさらに含み、
前記接触制御手段は、前記接触手段を制御することにより、前記接触位置設定手段により設定された部分と前記部分処理スポンジとが接触するように、前記部分処理スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させる、請求項2記載の基板処理装置。
【請求項4】
前記スポンジを洗浄するスポンジ洗浄手段をさらに含む、請求項1〜3のいずれか一項に記載の基板処理装置。
【請求項5】
前記スポンジ洗浄手段は、
前記スポンジが浸漬される処理液を貯留する洗浄槽と、
前記洗浄槽に貯留されている処理液に前記スポンジが浸漬されている状態で前記スポンジを保持するスポンジ保持手段と、
前記スポンジ保持手段に保持されている前記スポンジを圧縮させる圧縮手段とを含む、請求項4記載の基板処理装置。
【請求項6】
前記スポンジ洗浄手段は、前記洗浄槽に貯留されている処理液を循環させる循環配管と、前記循環配管を流れる処理液から異物を除去するフィルタとをさらに含む、請求項5記載の基板処理装置。
【請求項7】
前記スポンジと前記基板保持手段に保持されている基板の主面とが接触している状態で前記スポンジと前記基板とを相対移動させて、前記スポンジと前記基板とを摺動させる摺動手段をさらに含む、請求項1〜6のいずれか一項に記載の基板処理装置。
【請求項8】
基板の汚染状態を測定する汚染状態測定手段と、
前記摺動手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記スポンジと前記基板との摺動を制御する摺動制御手段とをさらに含む、請求項7記載の基板処理装置。
【請求項9】
基板の汚染状態を測定する汚染状態測定手段と、
前記基板保持手段に保持されている基板の主面に対する前記スポンジの押し付け量を変更する押し付け量変更手段と、
前記押し付け量変更手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記押し付け量を変更する押し付け量制御手段とをさらに含む、請求項1〜8のいずれか一項に記載の基板処理装置。
【請求項10】
基板の温度を変化させる温度変更手段をさらに含む、請求項1〜9のいずれか一項に記載の基板処理装置。
【請求項11】
前記温度変更手段は、基板を加熱する加熱手段と、基板を冷却する冷却手段と、前記加熱手段および冷却手段によって基板の加熱および冷却を交互に実行させる温度制御手段とを含む、請求項10記載の基板処理装置。
【請求項12】
基板にリンス液を供給するリンス液供給手段と、
基板を乾燥させる乾燥手段と、
前記スポンジから基板への処理液の供給が行われる供給ステーションと、
前記リンス液供給手段から基板へのリンス液の供給および前記乾燥手段による基板の乾燥が行われるリンス・乾燥ステーションと、
基板の搬入および搬出が行われる搬入・搬出ステーションとをさらに含み、
基板が、前記搬入・搬出ステーションから前記供給ステーションに移動し、その後、前記供給ステーションから前記リンス・乾燥ステーションを通って前記搬入・搬出ステーションに移動するように、前記基板を搬送する搬送手段とをさらに含む、請求項1〜11のいずれか一項に記載の基板処理装置。
【請求項13】
前記基板処理装置は、基板が搬送される搬送路をさらに含み、
前記搬入・搬出ステーション、前記リンス・乾燥ステーション、および前記供給ステーションは、この順番で前記搬送路に沿って配置されており、
前記搬送手段は、前記搬送路に沿って基板を搬送する、請求項12記載の基板処理装置。
【請求項14】
処理液を吸収可能で弾性変形可能なスポンジに処理液供給手段によって処理液を供給し、前記スポンジに処理液を吸収させるステップと、
処理液を吸収した前記スポンジと基板保持手段に保持されている基板の主面とを接触手段によって相対移動させて接触させ、前記スポンジに吸収されている処理液を前記基板の主面に供給させるステップとを含む、基板処理方法。
【請求項1】
処理液を吸収可能で弾性変形可能なスポンジと、
前記スポンジに処理液を供給する処理液供給手段と、
基板を保持する基板保持手段と、
前記スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させて両者を接触させることにより、前記スポンジに吸収されている処理液を前記基板の主面に供給させる接触手段とを含む、基板処理装置。
【請求項2】
前記スポンジは、基板の主面以上の大きさの第1基板接触面を有する全面処理スポンジと、基板の主面よりも小さい第2基板接触面を有する部分処理スポンジとを含み、
前記基板処理装置は、前記接触手段を制御することにより、前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジと前記基板保持手段に保持されている基板の主面とを接触させる接触制御手段をさらに含む、請求項1記載の基板処理装置。
【請求項3】
前記基板処理装置は、
基板の汚染状態を測定する汚染状態測定手段と、
前記汚染状態測定手段の測定結果に基づいて前記全面処理スポンジおよび部分処理スポンジのうちのいずれか一方のスポンジを選択するスポンジ選択手段と、
前記スポンジ選択手段によって前記部分処理スポンジが選択されたときに、基板の主面において前記部分処理スポンジが接触する部分を、前記汚染状態測定手段の測定結果に基づいて基板ごとに設定する接触位置設定手段とをさらに含み、
前記接触制御手段は、前記接触手段を制御することにより、前記接触位置設定手段により設定された部分と前記部分処理スポンジとが接触するように、前記部分処理スポンジと前記基板保持手段に保持されている基板の主面とを相対移動させる、請求項2記載の基板処理装置。
【請求項4】
前記スポンジを洗浄するスポンジ洗浄手段をさらに含む、請求項1〜3のいずれか一項に記載の基板処理装置。
【請求項5】
前記スポンジ洗浄手段は、
前記スポンジが浸漬される処理液を貯留する洗浄槽と、
前記洗浄槽に貯留されている処理液に前記スポンジが浸漬されている状態で前記スポンジを保持するスポンジ保持手段と、
前記スポンジ保持手段に保持されている前記スポンジを圧縮させる圧縮手段とを含む、請求項4記載の基板処理装置。
【請求項6】
前記スポンジ洗浄手段は、前記洗浄槽に貯留されている処理液を循環させる循環配管と、前記循環配管を流れる処理液から異物を除去するフィルタとをさらに含む、請求項5記載の基板処理装置。
【請求項7】
前記スポンジと前記基板保持手段に保持されている基板の主面とが接触している状態で前記スポンジと前記基板とを相対移動させて、前記スポンジと前記基板とを摺動させる摺動手段をさらに含む、請求項1〜6のいずれか一項に記載の基板処理装置。
【請求項8】
基板の汚染状態を測定する汚染状態測定手段と、
前記摺動手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記スポンジと前記基板との摺動を制御する摺動制御手段とをさらに含む、請求項7記載の基板処理装置。
【請求項9】
基板の汚染状態を測定する汚染状態測定手段と、
前記基板保持手段に保持されている基板の主面に対する前記スポンジの押し付け量を変更する押し付け量変更手段と、
前記押し付け量変更手段を制御することにより、前記汚染状態測定手段の測定結果に基づいて前記押し付け量を変更する押し付け量制御手段とをさらに含む、請求項1〜8のいずれか一項に記載の基板処理装置。
【請求項10】
基板の温度を変化させる温度変更手段をさらに含む、請求項1〜9のいずれか一項に記載の基板処理装置。
【請求項11】
前記温度変更手段は、基板を加熱する加熱手段と、基板を冷却する冷却手段と、前記加熱手段および冷却手段によって基板の加熱および冷却を交互に実行させる温度制御手段とを含む、請求項10記載の基板処理装置。
【請求項12】
基板にリンス液を供給するリンス液供給手段と、
基板を乾燥させる乾燥手段と、
前記スポンジから基板への処理液の供給が行われる供給ステーションと、
前記リンス液供給手段から基板へのリンス液の供給および前記乾燥手段による基板の乾燥が行われるリンス・乾燥ステーションと、
基板の搬入および搬出が行われる搬入・搬出ステーションとをさらに含み、
基板が、前記搬入・搬出ステーションから前記供給ステーションに移動し、その後、前記供給ステーションから前記リンス・乾燥ステーションを通って前記搬入・搬出ステーションに移動するように、前記基板を搬送する搬送手段とをさらに含む、請求項1〜11のいずれか一項に記載の基板処理装置。
【請求項13】
前記基板処理装置は、基板が搬送される搬送路をさらに含み、
前記搬入・搬出ステーション、前記リンス・乾燥ステーション、および前記供給ステーションは、この順番で前記搬送路に沿って配置されており、
前記搬送手段は、前記搬送路に沿って基板を搬送する、請求項12記載の基板処理装置。
【請求項14】
処理液を吸収可能で弾性変形可能なスポンジに処理液供給手段によって処理液を供給し、前記スポンジに処理液を吸収させるステップと、
処理液を吸収した前記スポンジと基板保持手段に保持されている基板の主面とを接触手段によって相対移動させて接触させ、前記スポンジに吸収されている処理液を前記基板の主面に供給させるステップとを含む、基板処理方法。
【図1】


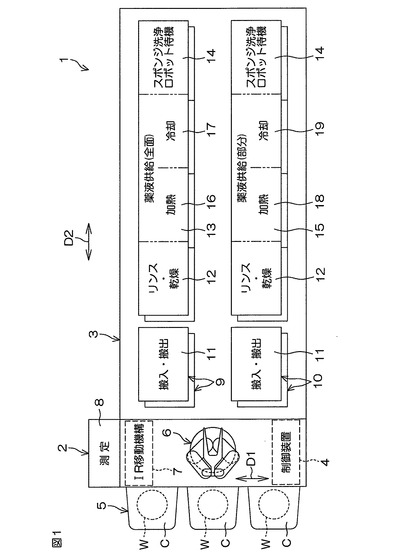
【図2】
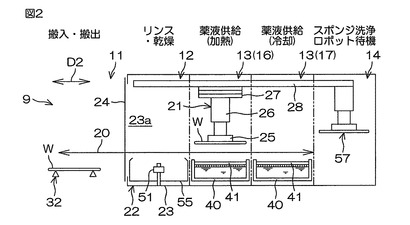
【図3】
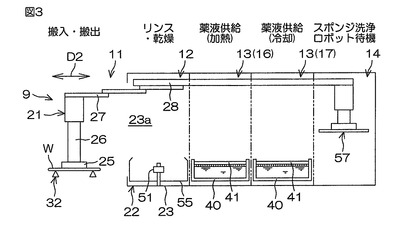
【図4】
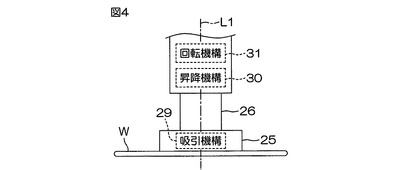
【図5】
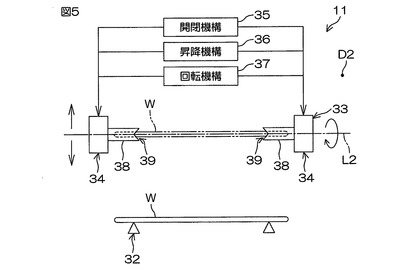
【図6】
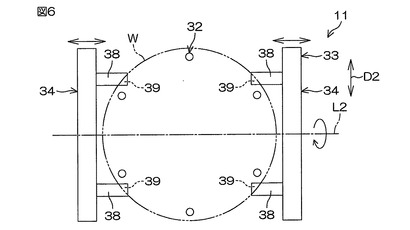
【図7】
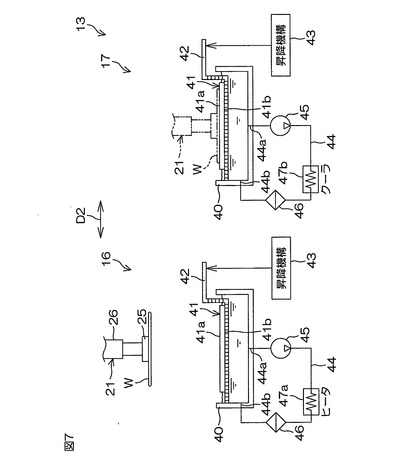
【図8】
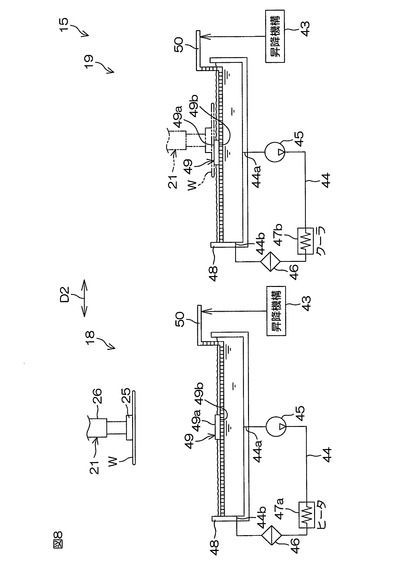
【図9】
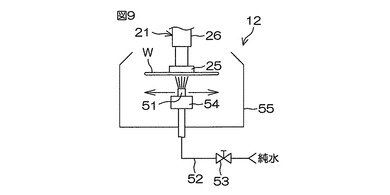
【図10】
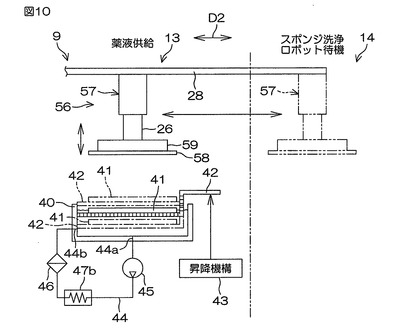
【図11】
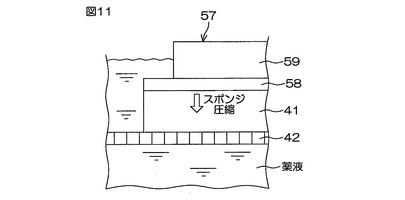
【図12】
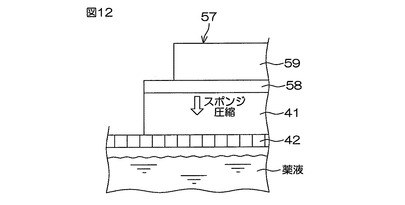
【図13】
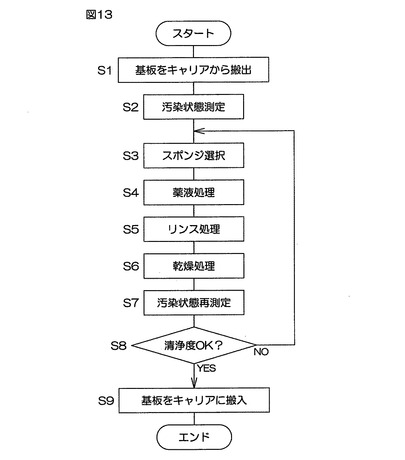
【図14】
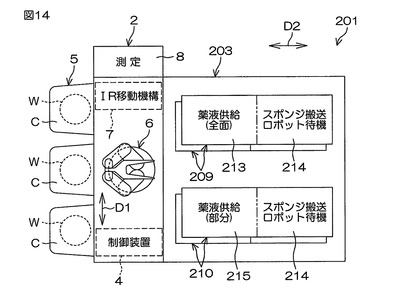
【図15】
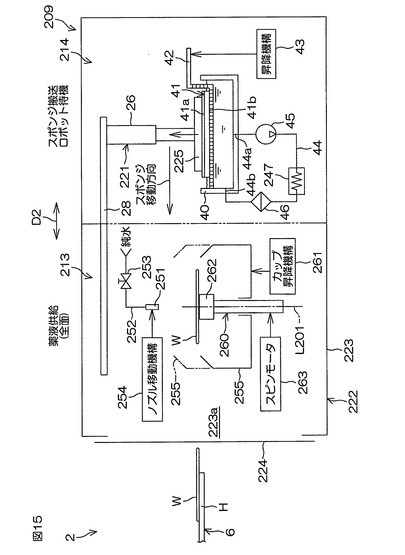
【図16】
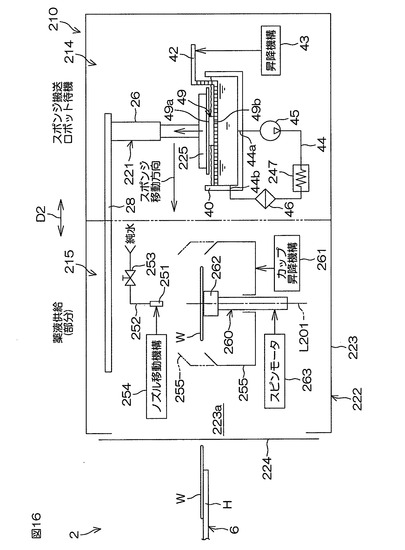
【図17】
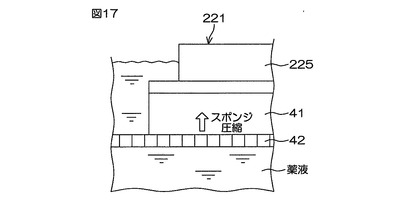
【図18】
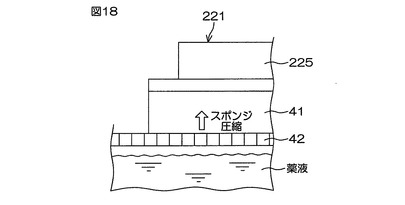
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−199407(P2012−199407A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−62945(P2011−62945)
【出願日】平成23年3月22日(2011.3.22)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月22日(2011.3.22)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
[ Back to top ]