
基板処理装置および基板搬送方法
【課題】搬送ロボットの待機時間を短縮できるとともに、装置の大型化が抑制または防止された基板処理装置および基板搬送方法を提供すること。
【解決手段】インデクサロボットIR1は、上下方向D1に配列された3個の基板保持部27のうち上側の2個の基板保持部27に基板Wを1枚ずつ搬入する。その後、3個の基板保持部27は、回転軸線L1まわりに180度回転する。これにより、基板Wが搬入された上側の2個の基板保持部27が下側に移動する。メイン搬送ロボットTR1は、下側に移動した2個の基板保持部27のうち上側の基板保持部27から基板Wを搬出する。その後、インデクサロボットIR1は、再び上側の2個の基板保持部27に基板Wを一枚ずつ搬入する。
【解決手段】インデクサロボットIR1は、上下方向D1に配列された3個の基板保持部27のうち上側の2個の基板保持部27に基板Wを1枚ずつ搬入する。その後、3個の基板保持部27は、回転軸線L1まわりに180度回転する。これにより、基板Wが搬入された上側の2個の基板保持部27が下側に移動する。メイン搬送ロボットTR1は、下側に移動した2個の基板保持部27のうち上側の基板保持部27から基板Wを搬出する。その後、インデクサロボットIR1は、再び上側の2個の基板保持部27に基板Wを一枚ずつ搬入する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、基板を処理する基板処理装置および、前記基板処理装置における基板搬送方法に関する。処理対象となる基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
半導体装置や液晶表示装置などの製造工程では、半導体ウエハや液晶表示装置用ガラス基板などの基板に対して処理液を用いた処理が行われる。基板を1枚ずつ処理する枚葉式の基板処理装置は、たとえば特許文献1に開示されている。この基板処理装置は、複数のキャリアを保持するキャリア保持部と、基板を処理する基板処理部と、キャリア保持部と基板処理部との間で上下に積層された2つの反転ユニットと、各反転ユニットとキャリア保持部との間で基板を搬送するインデクサロボットと、各反転ユニットと基板処理部との間で基板を搬送するメイン搬送ロボットとを備えている。各反転ユニットは、水平に保持した基板を水平軸線(回転軸線)まわりに180度回転させることにより、基板の表裏を反転させる。インデクサロボットおよびメイン搬送ロボットは、各反転ユニットにアクセス可能である。
【0003】
各反転ユニットは、基板を水平に保持する複数の基板保持部を備えている。インデクサロボットが一度に搬送する基板の枚数と、メイン搬送ロボットが一度に搬送する基板の枚数とが異なる場合は、大きい方の枚数の2倍の個数の基板保持部が各反転ユニットに備えられる。また、インデクサロボットが一度に搬送する基板の枚数と、メイン搬送ロボットが一度に搬送する基板の枚数とが等しい場合は、各搬送ロボット(インデクサロボットおよびメイン搬送ロボットのそれぞれ)が一度に搬送する基板の枚数の2倍の個数の基板保持部が各反転ユニットに備えられる。たとえば、各搬送ロボットが一度に搬送する基板の枚数が1である場合には、2個の基板保持部が各反転ユニットに備えられる。さらに、各反転ユニットに備えられた複数の基板保持部は、回転軸線を挟んで対称に配置される。たとえば、2個の基板保持部が備えられている場合は、2個の基板保持部が回転軸線を挟んで上下対称に配置される。
【0004】
2個の基板保持部が各反転ユニットに備えられている場合に、一方の反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を1枚ずつ搬送するときには、たとえば、以下の一連の動作が繰り返し行われる。すなわち、インデクサロボットは、キャリアから搬出した基板を一方の反転ユニットの上側の基板保持部に搬入する。その後、一方の反転ユニットは、2個の基板保持部を回転軸線まわりに180度回転させる。これにより、基板が搬入された上側の基板保持部が回転軸線の下側に移動し、基板が搬入されていない(空の)下側の基板保持部が回転軸線の上側に移動する。メイン搬送ロボットは、一方の反転ユニットによって表裏が反転された基板を一方の反転ユニットの下側の基板保持部から搬出する。
【0005】
同様に、2個の基板保持部が各反転ユニットに備えられている場合に、他方の反転ユニットによって基板の表裏を反転させながら、基板処理部からキャリア保持部に複数枚の基板を1枚ずつ搬送するときには、たとえば、以下の一連の動作が繰り返し行われる。すなわち、メイン搬送ロボットは、基板処理部から搬出した基板を他方の反転ユニットの上側の基板保持部に搬入する。その後、他方の反転ユニットは、2個の基板保持部を回転軸線まわりに180度回転させる。これにより、基板が搬入された上側の基板保持部が回転軸線の下側に移動し、基板が搬入されていない(空の)下側の基板保持部が回転軸線の上側に移動する。インデクサロボットは、他方の反転ユニットによって表裏が反転された基板を他方の反転ユニットの下側の基板保持部から搬出する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−252888号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前述のような基板処理装置において、基板処理装置のスループット(単位時間当たりの基板の処理枚数)を増加させることが望まれている。スループットを増加させる方法としては、たとえば、基板の搬送時間を短縮することが考えられる。基板の搬送時間は、たとえば、インデクサロボットおよびメイン搬送ロボットの待機時間を短縮することにより短縮される。
【0008】
前述のように一方の反転ユニットを経由してキャリアから基板処理部に複数枚の基板を搬送させれば、インデクサロボットは、メイン搬送ロボットによって一方の反転ユニットから基板が搬出される前に、次の基板を一方の反転ユニットに搬入することができる。これにより、インデクサロボットの待機時間を短縮することができる。
同様に、前述のように他方の反転ユニットを経由して基板処理部からキャリアに複数枚の基板を搬送させれば、メイン搬送ロボットは、インデクサロボットによって他方の反転ユニットから基板が搬出される前に、次の基板を他方の反転ユニットに搬入することができる。これにより、メイン搬送ロボットの待機時間を短縮することができる。
【0009】
しかしながら、前述の基板処理装置では、各搬送ロボットが一度に搬送する基板の枚数の2倍の基板保持部が各反転ユニットに備えられる。したがって、各搬送ロボットが一度に搬送する基板の枚数が増えるほど、各反転ユニットが大型化する。各反転ユニットは、基板処理装置内の非常に限られた空間に配置されるから、小型であることが好ましい。
そこで、この発明の目的は、搬送ロボットの待機時間を短縮できるとともに、装置の大型化が抑制または防止された基板処理装置および基板搬送方法を提供することである。
【課題を解決するための手段】
【0010】
前記目的を達成するための請求項1記載の発明は、基板(W)をそれぞれ保持する第1保持部(6)および第2保持部(12)と、予め定める配列方向(D1)に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部(27)と、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構(28)と、前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボット(IR1〜IR5)と、前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボット(TR1)と、前記第1搬送ロボットを制御することにより、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、前記回転機構を制御することにより、前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、前記第2搬送ロボットを制御することにより、前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、前記第1搬送ロボットを制御することにより、前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを実行する制御手段(4)と含む、基板処理装置(1)である。
【0011】
なお、この項において、括弧内の英数字は、後述の実施形態における対応構成要素の参照符号を表すものであるが、これらの参照符号により特許請求の範囲を限定する趣旨ではない。
この構成によれば、基板保持部を経由して第1保持部と第2保持部との間で複数枚の基板が搬送される。具体的には、第1保持部に保持された基板は、第1搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第2搬送ロボットによって第2保持部に搬送される。一方、第2保持部に保持された基板は、第2搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第1搬送ロボットによって第1保持部に搬送される。
【0012】
制御手段は、第1搬送ロボットによって第1保持部からn枚の基板を搬出させる。また、制御手段は、第2搬送ロボットによって基板保持部からm枚の基板を搬出させる。nは、2以上の整数であり、mは、nよりも小さい正の整数で、かつnの約数である。基板保持部は、n+m個設けられている。n+m個の基板保持部は、予め定める配列方向に配列されている。したがって、n+m個の基板保持部は、配列方向に配列した状態で基板をそれぞれ保持することができる。さらに、n+m個の基板保持部は、基板の表裏が反転するように一括して回転可能である。回転機構は、回転前とは逆の順番でn+m個の基板保持部が配列方向に配列するようにn+m個の基板保持部を回転させる。これにより、n+m個の基板保持部に保持された基板の表裏が反転される。
【0013】
基板の表裏を反転させながら、第1保持部と第2保持部との間で複数枚の基板を搬送する場合には、制御手段は、たとえば、以下のように第1搬送ロボット等を制御する。
すなわち、制御手段は、第1搬送ロボットを制御することにより、第1搬送ロボットによって、第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて配列方向の一方端からn番目までのn個の基板保持部に搬入させる(第1搬入工程)。第1搬入工程が行われた後は、配列方向の一方側のn個の基板保持部のそれぞれに基板が搬入されており、残りのm個の基板保持部には基板が搬入されていない。
【0014】
制御手段は、回転機構を制御することにより、第1搬入工程の後に、回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番でn+m個の基板保持部が配列方向に配列するようにn+m個の基板保持部を回転させる(反転工程)。反転工程が行われた後は、配列方向の一方側のn個の基板保持部が、配列方向の他方側に移動している。したがって、反転工程が行われた後は、配列方向の一方側のm個の基板保持部には基板が搬入されておらず、残りのn個の基板保持部のそれぞれに基板が搬入されている。
【0015】
制御手段は、第2搬送ロボットを制御することにより、反転工程の後に、第2搬送ロボットによって、第1搬入工程においてn個の基板保持部に搬入されたn枚の基板を配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を第2保持部に搬入させる(搬出工程)。すなわち、反転工程が行われた後は、配列方向の他方側のn個の基板保持部にn枚の基板が搬入されている。制御手段は、このn枚の基板のうち配列方向の一方端に位置する基板からm番目までのm枚の基板を第2搬送ロボットによって搬出させる。その後、制御手段は、残りの(n−m)枚の基板のうち配列方向の一方端に位置する基板からm番目までのm枚の基板を第2搬送ロボットによって搬出させる。制御手段は、このようにして、第2搬送ロボットによるm枚の基板の搬出を繰り返し実行させる。mは、nよりも小さい正の整数で、かつnの約数であるから、これにより、n枚の基板がn個の基板保持部から搬出される。
【0016】
一方、制御手段は、第1搬送ロボットを制御することにより、反転工程の後に、第1搬送ロボットによって、第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて配列方向の一方端からn番目までのn個の基板保持部に搬入させる(第2搬入工程)。反転工程が行われた後であって、第2搬送ロボットが基板保持部から基板を搬出する前には、配列方向の一方側のm個の基板保持部には基板が搬入されておらず、残りのn個の基板保持部のそれぞれに基板が搬入されている。つまり、配列方向の一方側のn個の基板保持部のいずれかに基板が搬入されているから、制御手段は、再び第1搬送ロボットによってn枚の基板を搬入させる前に、第2搬送ロボットによるm枚の基板の搬出を1回または複数回実行させて、配列方向の一方側のn個の基板保持部を空にさせる。
【0017】
具体的には、n=2、m=1の場合を想定する。この場合、n+m=3であるから、3個の基板保持部が設けられている。したがって、第1搬送工程では、配列方向の一方側の2個(n個)の基板保持部に基板が搬入される。そのため、反転工程が行われた後であって、第2搬送ロボットによる基板の搬出が行われる前は、配列方向の一方端に位置する1個(m個)の基板保持部には基板が搬入されておらず、残りの2個(n個)の基板保持部に基板が搬入されている。よって、第2搬送ロボットが1枚(m枚)の基板を最初に搬出した後は、配列方向の一方端から2番目(m+m番目)までの2個(2m個)の基板保持部には基板が搬入されておらず、残りの1個(n−m個)の基板保持部に基板が搬入されている。すなわち、第1搬送ロボットによって搬入された全ての基板(n枚の基板)が搬出される前に、配列方向の一方側の2個(n個)の基板保持部が空になっている。したがって、制御手段は、第2搬送ロボットによる1枚(m枚)の基板の搬出を1回実行させた後に、第1搬送ロボットによって配列方向の一方側の2個(n個)の基板保持部に2枚(n枚)の基板を搬入させる(第2搬入工程)。
【0018】
次に、n=3、m=1の場合を想定する。この場合、反転工程が行われた後であって、第2搬送ロボットによる基板の搬出が行われる前は、配列方向の一方端に位置する1個(m個)の基板保持部には基板が搬入されておらず、残りの3個(n個)の基板保持部に基板が搬入されている。この3個(n個)の基板保持部に保持された3枚(n枚)の基板は、第2搬送ロボットによって、配列方向の一方側から順に1枚(m枚)ずつ搬出される。したがって、第2搬送ロボットによる1枚(m枚)の基板の搬出が2回行われた後は、配列方向の一方端から3番目(m+2m番目)までの3個(3m個)の基板保持部には基板が搬入されておらず、残りの1個(n−2m個)の基板保持部に基板が搬入されている。すなわち、第1搬送ロボットによって搬入された全ての基板(n枚の基板)が搬出される前に、配列方向の一方側の3個(n個)の基板保持部が空になっている。したがって、制御手段は、第2搬送ロボットによる1枚(m枚)の基板の搬出を2回実行させた後に、第1搬送ロボットによって配列方向の一方側の3個(n個)の基板保持部に3枚(n枚)の基板を搬入させる(第2搬入工程)。
【0019】
このように、制御手段は、第1搬送ロボットによって搬入された全ての基板が搬出される前に、配列方向の一方側のn個の基板保持部を空にさせる。したがって、制御手段は、第1搬送ロボットによって搬入された全ての基板が搬出される前に、再び第1搬送ロボットによってn枚の基板を配列方向の一方端からn番目までのn個の基板保持部に搬入させることができる。そのため、制御手段は、第1搬送ロボットによって搬入された全ての基板が搬出されるまで第1搬送ロボットを待機させなくてもよい。これにより、第1搬送ロボットの待機時間を短縮することができる。また、基板保持部の個数は、n+m(mは、nよりも小さい正の整数)であり、第1搬送ロボットが一度に搬送する基板の枚数(n枚)の2倍(2n)より少ない。したがって、第1搬送ロボットが一度に搬送する基板の枚数の2倍の個数の基板保持部が設けられる場合に比べて、基板処理装置の大型化を抑制または防止することができる。
【0020】
請求項2記載の発明は、前記制御手段は、前記搬出工程と並行して、前記第2搬入工程を実行するように構成されている、請求項1記載の基板処理装置である。
この構成によれば、第2搬送ロボットによる基板の搬出と並行して、第1搬送ロボットによる基板の搬入が行われる。したがって、第1搬送ロボットによって搬入された全ての基板が第2搬送ロボットによって搬出された後に、第1搬送ロボットによる基板の搬入が行われる場合に比べて、基板の搬送時間を短縮することができる。これにより、基板処理装置のスループットを増加させることができる。
【0021】
前記制御手段は、前記第1搬入工程および第2搬入工程の少なくとも一方の工程において、前記第1搬送ロボットによってn枚の基板を複数回に分けてn個の前記基板保持部に搬入させるように構成されていてもよいし、請求項3記載の発明のように、前記第1搬入工程および第2搬入工程の少なくとも一方の工程において、前記第1搬送ロボットによってn枚の基板をそれぞれn個の前記基板保持部に同時に搬入させるように構成されていてもよい。n枚の基板を同時に搬入することにより、基板の搬入時間を短縮することができる。
【0022】
請求項4記載の発明は、nは、mに2を掛けた値である、請求項1〜3のいずれか一項に記載の基板処理装置である。
反転工程が行われた後であって、第2搬送ロボットによる基板の搬出が行われる前(搬出工程が行われる前)は、配列方向の一方側のm個の基板保持部には基板が搬入されておらず、残りのn個の基板保持部に基板が搬入されている。搬出工程では、n個の基板保持部に保持されたn枚の基板が、第2搬送ロボットによって、配列方向の一方端に位置する基板から順にm枚ずつ搬出される。したがって、第2搬送ロボットによる基板の搬出が1回行われると、配列方向の一方側の(m+m)個の基板保持部が空になる。つまり、m+m=2×m=nであるから、第2搬送ロボットによるm枚の基板の搬出が1回行われると、配列方向の一方側のn個の基板保持部が空になる。そのため、制御手段は、第2搬送ロボットによるm枚の基板の搬出が1回行われた後に、第1搬送ロボットによる基板の搬入(第2搬入工程)を開始することができる。すなわち、制御手段は、第2搬送ロボットによるm枚の基板の搬出が複数回行われるまで第1搬送ロボットを待機させなくてもよい。これにより、第1搬送ロボットの待機時間を短縮することができる。
【0023】
請求項5記載の発明は、前記第1保持部は、複数枚の基板を収容する複数の収容部材(C)を保持する収容部材保持部(6)を含み、前記第2保持部は、基板を保持して、保持した基板を処理する基板処理部(12)を含み、前記基板処理装置は、前記第1搬送ロボットを移動させる移動機構(7)をさらに含み、前記制御手段は、前記移動機構を制御することにより、前記複数の収容部材と前記基板保持部との間で前記第1搬送ロボットを移動させるように構成されている、請求項1〜4のいずれか一項に記載の基板処理装置である。
【0024】
この構成によれば、基板保持部を経由して収容部材保持部と基板処理部との間で複数枚の基板が搬送される。具体的には、収容部材保持部に保持された各収容部材に収容された基板は、第1搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第2搬送ロボットによって基板処理部に搬送される。これにより、基板が処理される。基板処理部で処理された基板は、第2搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第1搬送ロボットによって収容部材保持部に保持された各収容部材に搬送される。
【0025】
制御手段は、移動機構を制御することにより、複数の収容部材と基板保持部との間で第1搬送ロボットを移動させる。したがって、第1搬送ロボットが基板を搬送する範囲は、第2搬送ロボットが基板を搬送する範囲よりも広い。そのため、第1搬送ロボットは、第2搬送ロボットよりも搬送負荷が高い。よって、第1搬送ロボットの待機時間を短縮させることにより、第1搬送ロボットが基板処理装置の処理速度を律することを抑制または防止することができる。
【0026】
請求項6記載の発明は、基板(W)をそれぞれ保持する第1保持部(6)および第2保持部(12)と、予め定める配列方向(D1)に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部(27)と、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構(28)と、前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボット(IR1〜IR5)と、前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボット(TR1)とを備える基板処理装置(1)において、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを備える基板搬送方法である。
【0027】
この発明によれば、請求項1に関連して述べた効果と同様な効果を奏することができる。
【図面の簡単な説明】
【0028】
【図1】この発明の第1実施形態に係る基板処理装置の平面図である。
【図2】この発明の第1実施形態に係る基板処理装置を図1における矢印IIが示す方向から見た図である。
【図3】図1におけるIII−III線に沿う基板処理装置の概略図である。
【図4】この発明の第1実施形態に係る第2反転ユニットを図3における矢印IVが示す方向から見た図である。
【図5】この発明の第1実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図6】この発明の第2実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図7】この発明の第3実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図8】この発明の第4実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図9】この発明の第5実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【発明を実施するための形態】
【0029】
以下では、本発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、この発明の第1実施形態に係る基板処理装置1の平面図である。図2は、この発明の第1実施形態に係る基板処理装置1を図1における矢印IIが示す方向から見た図であり、図3は、図1におけるIII−III線に沿う基板処理装置1の概略図である。
基板処理装置1は、半導体ウエハ等の基板Wを1枚ずつ処理する枚葉式の基板処理装置である。図1に示すように、基板処理装置1は、インデクサブロック2と、インデクサブロック2に結合された処理ブロック3と、基板処理装置1を制御する制御部4(制御手段)とを備えている。インデクサブロック2と処理ブロック3との境界部分には、基板受け渡し部5が設けられている。
【0030】
インデクサブロック2は、キャリア保持部6(第1保持部、収容部材保持部)と、インデクサロボットIR1(第1搬送ロボット)と、インデクサロボット移動機構(移動機構。以下では、「IR移動機構7」という。)とを備えている。キャリア保持部6は、複数のキャリアC(収容部材)を保持している。複数のキャリアCは、水平に延びるキャリア配列方向Uに沿って配列された状態でキャリア保持部6に保持されている。インデクサロボットIR1は、キャリア保持部6と処理ブロック3との間に配置されている。IR移動機構7は、キャリア配列方向Uに沿ってインデクサロボットIR1を水平移動させる。インデクサロボットIR1は、IR移動機構7によって、各キャリアCに対向する位置および基板受け渡し部5に対向する位置に配置される。インデクサロボットIR1は、各キャリアCと基板受け渡し部5との間で基板Wの搬送を行う。さらに、インデクサロボットIR1は、キャリアCおよび基板受け渡し部5に基板Wを搬入する搬入動作と、キャリアCおよび基板受け渡し部5から基板Wを搬出する搬出動作とを行う。
【0031】
図1に示すように、インデクサロボットIR1は、たとえば、2つのアーム8と、2つのハンド9とを備えている。インデクサロボットIR1は、2つのアーム8を互いに独立して水平に伸縮させることができる。各アーム8の先端には、ハンド9が1つ取り付けられている。2つのハンド9は、上下方向D1(配列方向)に間隔を空けて水平に配置されている(図1では、2つのハンド9が上下に重なり合っている。)。インデクサロボットIR1は、各ハンド9によって基板Wを支持することにより、2枚の基板Wを水平に保持することができる。インデクサロボットIR1に備えられるハンド9の数は、2つに限らず、1つ、または3つ以上であってもよい。ハンド9が3つ以上備えられる場合は、複数のハンド9が上下方向D1に間隔を空けて1つのアーム8に取り付けられていてもよいし、ハンド9ごとに専用のアーム8が設けられていてもよい。
【0032】
また、図示はしないが、インデクサロボットIR1は、インデクサロボットIR1に内蔵された第1旋回機構および第1昇降駆動機構を備えている。第1旋回機構は、2つのハンド9を対応するアーム8とともに鉛直軸線まわりに回転させる。また、第1昇降駆動機構は、2つのハンド9を対応するアーム8とともに上下方向D1に昇降させる。これにより、インデクサロボットIR1は、各キャリアCおよび基板受け渡し部5に各ハンド9を対向させることができる。
【0033】
一方、処理ブロック3は、基板Wを処理する複数(たとえば8つ)の基板処理部12(第2保持部)と、メイン搬送ロボットTR1(第2搬送ロボット)とを備えている。8つの基板処理部12のうち4つの基板処理部12は、第1処理ユニット13を構成しており、残り4つの基板処理部12は、第2処理ユニット14を構成している。図2に示すように、第1処理ユニット13を構成する4つの基板処理部12は、上下に積層されており、第2処理ユニット14を構成する4つの基板処理部12は、上下に積層されている。図1に示すように、第1処理ユニット13および第2処理ユニット14は、メイン搬送ロボットTR1を間に挟んでキャリア配列方向Uに対向するように配置されている。さらに、第1処理ユニット13および第2処理ユニット14は、キャリア保持部6に対して、キャリア配列方向Uに直交する水平方向に間隔を空けて配置されている。メイン搬送ロボットTR1は、各基板処理部12と基板受け渡し部5との間で基板Wの搬送を行う。さらに、メイン搬送ロボットTR1は、基板処理部12および基板受け渡し部5に基板Wを搬入する搬入動作と、基板処理部12および基板受け渡し部5から基板Wを搬出する搬出動作とを行う。
【0034】
図1に示すように、メイン搬送ロボットTR1は、2つのアーム15と、2つのハンド16とを備えている。メイン搬送ロボットTR1は、2つのアーム15を互いに独立して水平に伸縮させることができる。各アーム15の先端には、ハンド16が1つ取り付けられている。2つのハンド16は、上下方向D1に間隔を空けて水平に配置されている(図1では、2つのハンド16が上下に重なり合っている。)。メイン搬送ロボットTR1は、各ハンド16によって基板Wを支持することにより、2枚の基板Wを水平に保持することができる。メイン搬送ロボットTR1に備えられるハンド16の数は、2つに限らず、1つ、または3つ以上であってもよい。ハンド16が3つ以上備えられる場合は、複数のハンド16が上下方向D1に間隔を空けて1つのアーム15に取り付けられていてもよいし、ハンド16ごとに専用のアーム15が設けられていてもよい。
【0035】
また、図示はしないが、メイン搬送ロボットTR1は、メイン搬送ロボットTR1に内蔵された第2旋回機構および第2昇降駆動機構を備えている。第2旋回機構は、2つのハンド16を対応するアーム15とともに鉛直軸線まわりに回転させる。また、第2昇降駆動機構は、2つのハンド16を対応するアーム15とともに上下方向D1に昇降させる。これにより、メイン搬送ロボットTR1は、各基板処理部12および基板受け渡し部5に各ハンド16を対向させることができる。
【0036】
また、各基板処理部12では、基板Wが1枚ずつ処理される。各基板処理部12では、洗浄、エッチング、剥離処理などの各種の処理が行われる。第1実施形態では、たとえば、基板Wに処理液を供給しながらブラシを擦りつけて当該基板Wを洗浄するスクラブ洗浄が各基板処理部12で行われる。第1処理ユニット13は、たとえば、基板Wの表面をスクラブ洗浄するための表面処理ユニットであり、第2処理ユニット14は、たとえば、基板Wの裏面をスクラブ洗浄するための裏面処理ユニットである。すなわち、第1処理ユニット13を構成する各基板処理部12は、基板Wの表面をスクラブ洗浄する表面処理部12aであり、第2処理ユニット14を構成する各基板処理部12は、基板Wの裏面をスクラブ洗浄する裏面処理部12bである。
【0037】
図2に示すように、表面処理部12aは、基板Wを水平に保持して回転させる第1スピンチャック19と、基板Wの上面(表面)に処理液を供給するノズル20と、基板Wの上面に押し付けられるブラシ21とを備えている。また、裏面処理部12bは、基板Wを水平に保持して回転させる第2スピンチャック22と、基板Wの上面(裏面)に処理液を供給するノズル20と、基板Wの上面に押し付けられるブラシ21とを備えている。第1スピンチャック19は、たとえば、基板Wの下面(裏面)を吸着することによって基板Wを水平に保持し、基板Wの中心を通る鉛直軸線まわりに基板Wを回転させるバキューム式のスピンチャックである。また、第2スピンチャック22は、たとえば、基板Wを周囲から挟持することによって基板Wを保持し、基板Wの中心を通る鉛直軸線まわりに基板Wを回転させる挟持式のスピンチャックである。
【0038】
また、図1に示すように、基板受け渡し部5は、平面視において、キャリア保持部6とメイン搬送ロボットTR1との間に配置されている。図2および図3に示すように、基板受け渡し部5は、第1反転ユニット23と、上下に積層された複数の送り側載置部24と、上下に積層された複数の戻り側載置部25と、第2反転ユニット26とを備えている。第1反転ユニット23、複数の送り側載置部24、複数の戻り側載置部25、および第2反転ユニット26は、上からこの順番で上下に積層されている。第1反転ユニット23は、メイン搬送ロボットTR1側からアクセスでき、インデクサロボットIR1側からアクセスできないように構成されている。また、各送り側載置部24、各戻り側載置部25、および第2反転ユニット26は、インデクサロボットIR1側およびメイン搬送ロボットTR1側のいずれの方向からでもアクセスできるように構成されている。第1反転ユニット23および第2反転ユニット26は、水平に保持した基板Wを水平軸線まわりに180度回転させることにより、基板Wの表裏を反転させる。また、各送り側載置部24および各戻り側載置部25は、インデクサロボットIR1およびメイン搬送ロボットTR1によって基板Wを載置させて保持する。
【0039】
たとえば、複数枚の基板Wの裏面だけを一枚ずつ処理する場合には、制御部4が、インデクサロボットIR1およびメイン搬送ロボットTR1等を制御して、たとえば以下の一連の動作を繰り返し実行させる。すなわち、各キャリアCには、デバイス形成面である基板Wの表面を上に向けて複数枚の基板Wが保持されている。キャリアCに収容された未処理の基板Wは、インデクサロボットIR1によってキャリアCから搬出され、表面が上に向けられた状態で第2反転ユニット26に搬入される。第2反転ユニット26に搬入された未処理の基板Wは、第2反転ユニット26によって表裏が反転された後、メイン搬送ロボットTR1によって搬出される。そして、第2反転ユニット26から搬出された未処理の基板Wは、メイン搬送ロボットTR1によって、裏面が上に向けられた状態でいずれかの基板処理部12(裏面処理部12b)に搬入される。これにより、基板Wの裏面が処理される。
【0040】
また、基板処理部12(裏面処理部12b)で処理された処理済みの基板Wは、メイン搬送ロボットTR1によって基板処理部12から搬出され、第1反転ユニット23に搬入される。第1反転ユニット23に搬入された処理済みの基板Wは、第1反転ユニット23によって表裏が反転された後、メイン搬送ロボットTR1によって搬出される。そして、第1反転ユニット23から搬出された処理済みの基板Wは、メイン搬送ロボットTR1によって、表面が上に向けられた状態でいずれかの戻り側載置部25に搬入される。戻り側載置部25に搬入された処理済みの基板Wは、インデクサロボットIR1によって戻り側載置部25から搬出され、表面が上に向けられた状態でいずれかのキャリアCに搬入される。このような一連の動作が繰り返し行われ、複数枚の基板Wの裏面だけが処理される。
【0041】
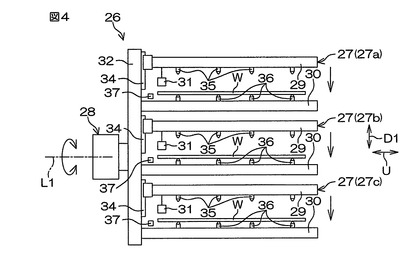
図4は、この発明の第1実施形態に係る第2反転ユニット26を図3における矢印IVが示す方向から見た図である。
第2反転ユニット26は、基板Wを保持する複数の基板保持部27と、複数の基板保持部27を回転させる回転機構28とを備えている。複数の基板保持部27は、予め定める配列方向に配列されている。回転機構28は、複数の基板保持部27を配列方向に交差する軸線まわりに180度回転させる。回転機構28が複数の基板保持部27を回転させると、複数の基板保持部27は、回転前との逆の順番で配列方向に配列される。
【0042】
第1実施形態では、たとえば、3個の基板保持部27(第1基板保持部27a、第2基板保持部27b、および第3基板保持部27c)が第2反転ユニット26に備えられている。第1基板保持部27a、第2基板保持部27b、および第3基板保持部27cは、たとえば、上からこの順番で上下方向D1に配列されている。すなわち、第1実施形態では、上下方向D1が、配列方向である。回転機構28は、たとえば、3個の基板保持部27の中間に位置する基板保持部27(第2基板保持部27b)を通る水平な回転軸線L1まわりに3個の基板保持部27を180度回転させる。回転軸線L1は、たとえば、キャリア配列方向Uに平行な軸線である。したがって、回転機構28は、キャリア配列方向Uに直交する平面に沿って3個の基板保持部27を180度回転させる。
【0043】
各基板保持部27は、たとえば、上下に対向する可動板29および固定板30と、可動板29を上下方向D1に平行移動させるアクチュエータ31とを含む。各可動板29は、たとえば、矩形状の板であり、各固定板30は、たとえば、可動板29と大きさが概ね等しい矩形状の板である。3つの基板保持部27の可動板29および固定板30は、平面視において重なり合うように水平な姿勢で上下方向D1に配列されている。さらに、3つの基板保持部27の可動板29および固定板30は、可動板29および固定板30が交互に並ぶように上下方向D1に配列されている。
【0044】
第2反転ユニット26は、鉛直面に沿って配置された支持板32と、上下方向D1に延びる複数(たとえば3つ)のガイド34とを備えている。各固定板30および可動板29は、支持板32に対して回転機構28とは反対側に配置されている。3つの固定板30は、上下に等間隔を空けて支持板32に水平に固定されている。また、各可動板29は、ガイド34を介して支持板32に水平に取り付けられている。各可動板29は、ガイド34に沿って上下方向D1に平行移動可能である。回転機構28は、各固定板30および可動板29とは反対側において支持板32に取り付けられている。
【0045】
各アクチュエータ31は、開位置(図4に示す位置)と閉位置との間で対応する可動板29を上下方向D1に平行移動させる。開位置は、インデクサロボットIR1の各ハンド9およびメイン搬送ロボットRT1の各ハンド16が一対の可動板29および固定板30の間に進入できる位置である。また、閉位置は、可動板29が開位置に位置しているときよりも一対の可動板29および固定板30の間隔が狭い位置である。アクチュエータ31は、たとえば、エアシリンダを含む。また、回転機構28は、支持板32を回転軸線L1まわりに180度回転させる。これにより、3つの基板保持部27が一括して回転される。回転機構28は、たとえば、モータを含む。
【0046】
また、各可動板29の固定板30に対向する面(図4では、各可動板29の下面)には、当該面から突出する複数本の第1支持ピン35が設けられている。また、各固定板30の可動板29に対向する面(図4では、各固定板30の上面)には、当該面から突出する複数本の第2支持ピン36が設けられている。複数本の第1支持ピン35は、基板Wの外周形状に対応する円周上で適当な間隔を空けて配置されている。同様に、複数本の第2支持ピン36は、基板Wの外周形状に対応する円周上で適当な間隔を空けて配置されている。
【0047】
固定板30が対の可動板29の下側に位置するように各対の可動板29および固定板30が配置されている状態(図4に示す状態)では、各固定板30は、複数本の第2支持ピン36の先端を基板Wの下面周縁部に点接触させて、基板Wを支持することができる。また、可動板29が対の固定板30の下側に位置するように各対の可動板29および固定板30が配置されている状態では、各可動板29は、複数本の第1支持ピン35の先端を基板Wの下面周縁部に点接触させて、基板Wを支持することができる。各基板保持部27は、基板検知センサ37を備えており、各基板保持部27での基板Wの有無は、基板検知センサ37によって検知される。各基板検知センサ37の検出値は、制御部4に入力される。
【0048】
各可動板29が開位置(図4に示す位置)に位置している状態では、各搬送ロボット(インデクサロボットIR1およびメイン搬送ロボットTR1のそれぞれ)は、上下に隣接する2個の基板保持部27に基板Wを1枚ずつ同時に搬入したり、上下に隣接する2個の基板保持部27から2枚の基板Wを同時に搬出したりすることができる。また、各可動板29が開位置に位置している状態では、各搬送ロボットは、3個の基板保持部27のいずれか1個の基板保持部27に1枚の基板Wを搬入したり、1個の基板保持部27から1枚の基板Wを搬出したりすることができる。
【0049】
各搬送ロボットが搬送する基板Wは、可動板29が開位置に位置している状態で一対の可動板29および固定板30の間に搬入され、可動板29または固定板30に支持される。制御部4は、アクチュエータ31を制御することにより、可動板29または固定板30によって基板Wが支持されている状態で可動板29を閉位置に移動させて、一対の可動板29および固定板30の間隔を減少させる。これにより、各第1支持ピン35および第2支持ピン36の先端が基板Wに点接触し、一対の可動板29および固定板30によって基板Wが挟持される。
【0050】
また、制御部4は、回転機構28を制御することにより、基板Wが挟持された状態で支持板32を回転軸線L1まわりに180度回転させて基板Wの表裏を反転させる。そして、制御部4は、アクチュエータ31を制御することにより、可動板29を開位置に移動させて、一対の可動板29および固定板30の間隔を増加させる。これにより、一対の可動板29および固定板30による基板Wの挟持が解除される。その後、可動板29または固定板30に支持された基板WがインデクサロボットIR1またはメイン搬送ロボットTR1によって第2反転ユニット26から搬出される。
【0051】
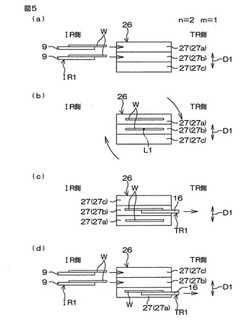
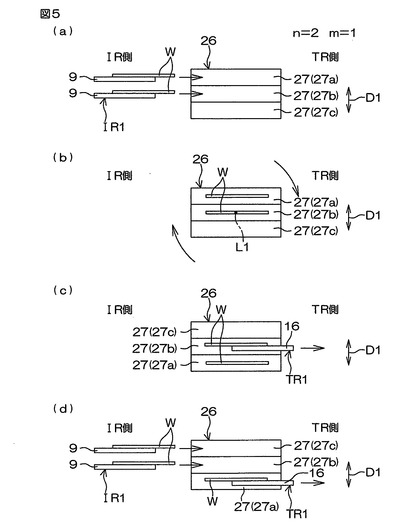
図5は、この発明の第1実施形態に係る第2反転ユニット26によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR1、メイン搬送ロボットTR1、および第2反転ユニット26の動作の一例を説明するための概略図である。
制御部4は、インデクサロボットIR1によって、n(nは、2以上の整数)枚の基板WをキャリアCから第2反転ユニット26に同時に搬送させ、このn枚の基板Wを第2反転ユニット26に搬入させる。そして、制御部4は、第2反転ユニット26によって各基板Wの表裏を反転させた後、第2反転ユニット26に保持されたn枚の基板Wをm(mは、nよりも小さい正の整数で、かつnの約数)枚ずつメイン搬送ロボットTR1によって第2反転ユニット26から搬出させる。
【0052】
第1実施形態では、制御部4は、たとえば、インデクサロボットIR1によって、2枚の基板WをキャリアCから第2反転ユニット26に同時に搬送させ、この2枚の基板Wを第2反転ユニット26に搬入させる。そして、制御部4は、第2反転ユニット26によって各基板Wの表裏を反転させた後、第2反転ユニット26に保持された2枚の基板Wを1枚ずつメイン搬送ロボットTR1によって第2反転ユニット26から搬出させる。すなわち、第1実施形態では、nが2であり、mが1である。また、第2反転ユニット26に備えられた基板保持部27の個数は、n+mであり、第1実施形態では、3である。
【0053】
以下では、第2反転ユニット26によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR1、メイン搬送ロボットTR1、および第2反転ユニット26の動作の一例を具体的に説明する。
制御部4は、インデクサロボットIR1によって、2枚の基板WをキャリアCから搬出させ、図5(a)に示すように、この2枚の基板WをキャリアCから第2反転ユニット26に同時に搬送させる。そして、図5(a)に示すように、制御部4は、インデクサロボットIR1によって、この2枚の基板Wを、上下方向D1の一方端から2番目までの2個の基板保持部27(図5(a)では、第1基板保持部27aおよび第2基板保持部27b)に同時に搬入させる(第1搬入工程)。
【0054】
その後、図5(b)に示すように、制御部4は、回転機構28によって、3個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる(反転工程)。これにより、図5(c)に示すように、3個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27cの順番で上下方向D1に配列されていた3個の基板保持部27が、上から第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0055】
制御部4は、3個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、2個の基板保持部27にそれぞれ搬入された2枚の基板Wを搬出させ、この2枚の基板Wを基板処理部12に搬入させる(搬出工程)。具体的には、図5(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第2基板保持部27bに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、図5(d)に示すように、制御部4は、メイン搬送ロボットTR1によって、第1基板保持部27aに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0056】
図5(d)に示すように、第2基板保持部27bに保持された基板W(1枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から2番目までの2個の基板保持部27(図5(d)では、第3基板保持部27cおよび第2基板保持部27b)が空になっている。図5(d)に示すように、制御部4は、メイン搬送ロボットTR1によって1枚目の基板Wを搬出させた後、インデクサロボットIR1によって、上下方向D1の一方端から2番目までの2個の基板保持部27(図5(d)では、第3基板保持部27cおよび第2基板保持部27b)に2枚の基板Wを同時に搬入させる(第2搬入工程)。
【0057】
また、制御部4は、再びインデクサロボットIR1によって2枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(2枚目の基板W)を搬出させた後に、回転機構28によって、3個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2基板保持部27bから基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0058】
メイン搬送ロボットTR1が1枚目の基板Wを搬出した後に行われるインデクサロボットIR1による2枚の基板Wの搬入は、メイン搬送ロボットTR1が2枚目の基板Wを搬出する前に行われてもよいし、搬出した後に行われてもよい。また、インデクサロボットIR1による2枚の基板Wの搬入と、メイン搬送ロボットTR1による2枚目の基板Wの搬出とが並行して行われてもよい。
【0059】
以上のように第1実施形態では、第2反転ユニット26によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときに、制御部4が、インデクサロボットIR1によって、上下方向D1に配列された3個の基板保持部27のうち上側の2個の基板保持部27に基板Wを1枚ずつ搬入させる(第1搬入工程)。そして、制御部4は、3個の基板保持部27を回転軸線L1まわりに180度回転させる(反転工程)。これにより、基板Wが搬入された上側の2個の基板保持部27が下側に移動する。制御部4は、メイン搬送ロボットTR1によって、下側に移動した2個の基板保持部27のうち上側の基板保持部27から基板W(1枚目の基板W)を搬出させる(搬出工程の一部)。これにより、上側の2個の基板保持部27が空になる。制御部4は、メイン搬送ロボットTR1によって1枚目の基板Wを搬出させた後、再びインデクサロボットIR1によって上側の2個の基板保持部27に基板Wを一枚ずつ搬入させる(第2搬入工程)。
【0060】
このように、制御部4は、インデクサロボットIR1によって搬入された全ての基板W(2枚の基板W)が搬出される前に、上側の2個の基板保持部27を空にさせる。したがって、制御部4は、インデクサロボットIR1によって搬入された全ての基板Wが搬出される前に、再びインデクサロボットIR1によって2枚の基板Wを上側の2個の基板保持部27に搬入させることができる。そのため、制御部4は、インデクサロボットIR1によって搬入された全ての基板Wが搬出されるまでインデクサロボットIR1を待機させなくてもよい。これにより、インデクサロボットIR1の待機時間を短縮することができる。したがって、基板Wの搬送時間を短縮することができる。よって、基板処理装置1のスループット(単位時間当たりの基板Wの処理枚数)を増加させることができる。
【0061】
また、第1実施形態では、インデクサロボットIR1が一度に搬送する基板Wの枚数が2であるから、基板保持部27が4つ設けられていれば、第2反転ユニット26で基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときに、インデクサロボットIR1の待機時間を短縮することができる。すなわち、上下方向D1に配列された4個の基板保持部27が第2反転ユニット26に設けられている場合は、インデクサロボットIR1によって上側の2個の基板保持部27に基板Wが1枚ずつ搬入された後に、4個の基板保持部27を回転軸線L1まわりに180度回転させれば、基板Wが搬入されていない(空の)下側の2個の基板保持部27が上側に移動する。したがって、制御部4は、メイン搬送ロボットTR1によって基板Wを搬出させる前に、インデクサロボットIR1によって上側の2個の基板保持部27に基板Wを1枚ずつ搬入させることができる。
【0062】
このように、インデクサロボットIR1が一度に搬送する基板Wの枚数の2倍の個数の基板保持部27が設けられていれば、インデクサロボットIR1の待機時間を短縮することができる。しかし、この場合、基板保持部27の個数が多いので、第2反転ユニット26が大型化してしまう。具体的には、第1実施形態では、複数の基板保持部27が上下方向D1に配列されているから、第2反転ユニット26の高さが増加してしまう。一方、第1実施形態では、インデクサロボットIR1が一度に搬送する基板Wの枚数の2倍の個数(4個)よりも少ない3個の基板保持部27を用いて、インデクサロボットIR1の待機時間を短縮させている。したがって、第2反転ユニット26の大型化を抑制または防止することができる。これにより、基板処理装置1の大型化を抑制または防止することができる。
【0063】
また、第2反転ユニット26は、インデクサロボットIR1が第2反転ユニット26に対向する位置(図1に示す位置。以下では、単に「対向位置」という。)とメイン搬送ロボットTR1との間で、複数の基板保持部27をキャリア配列方向Uに直交する平面に沿って回転させる。したがって、第2反転ユニット26の高さが大きい場合には、複数の基板保持部27の回転に伴って第2反転ユニット26がインデクサロボットIR1およびメイン搬送ロボットTR1に衝突しないように、対向位置とメイン搬送ロボットTR1との間の距離を十分に確保する必要がある。しかし、対向位置とメイン搬送ロボットTR1との間の距離が増加すると、基板処理装置1のフットプリント(占有面積)が増加する場合がある。したがって、第2反転ユニット26の高さの増加を抑制または防止することにより、基板処理装置1のフットプリントの増加を抑制または防止することができる。
【0064】
また、第1実施形態では、制御部4は、搬出工程と並行して第2搬入工程を実行させることができる。すなわち、制御部4は、メイン搬送ロボットTR1によって2枚目の基板Wが搬出される前や、メイン搬送ロボットTR1が2枚目の基板Wを搬出している間に、インデクサロボットIR1によって2枚の基板Wを搬入させることができる。したがって、2枚目の基板Wが搬出された後に(搬出工程の後に)、インデクサロボットIR1による2枚の基板Wの搬入(第2搬入工程)が行われる場合に比べて、基板Wの搬送時間を短縮することができる。これにより、スループットをさらに増加させることができる。
【0065】
また、第1実施形態では、制御部4は、第1搬入工程および第2搬入工程のそれぞれの工程おいて、インデクサロボットIR1によって2個の基板保持部27に基板Wを1枚ずつ同時に搬入させる。したがって、2枚の基板Wを2個の基板保持部27に順次搬入する場合に比べて、基板Wの搬入時間を短縮することができる。これにより、基板Wの搬送時間を短縮することができる。
【0066】
また、第1実施形態では、n=2、m=1であり、nは、mに2を掛けた値である。反転工程が行われた後であって、メイン搬送ロボットTR1による基板Wの搬出が行われる前(搬出工程が行われる前)は、一番上に位置する1個(m個)の基板保持部27には基板Wが搬入されておらず、残りの2個(n個)の基板保持部27に基板Wが搬入されている。搬出工程では、2個(n個)の基板保持部27に保持された2枚(n枚)の基板Wが、メイン搬送ロボットTR1によって、一番上に位置する基板Wから順に1枚(m枚)ずつ搬出される。したがって、メイン搬送ロボットTR1による基板Wの搬出が1回行われると、上側の2個(m+m個)の基板保持部27が空になる。そのため、制御部4は、メイン搬送ロボットTR1による1枚(m枚)の基板Wの搬出が1回行われた後に、インデクサロボットIR1による基板Wの搬入(第2搬入工程)を開始することができる。すなわち、制御部4は、メイン搬送ロボットTR1による1枚(m枚)の基板Wの搬出が複数回行われるまでインデクサロボットIR1を待機させなくてもよい。これにより、インデクサロボットIR1の待機時間を短縮することができる。
【0067】
また、第1実施形態では、制御部4は、IR移動機構7を制御することにより、複数のキャリアCと基板受け渡し部5との間でインデクサロボットIR1を水平に移動させる。したがって、インデクサロボットIR1が基板Wを水平に搬送する範囲は、メイン搬送ロボットTR1が基板Wを搬送する範囲よりも広い。そのため、インデクサロボットIR1は、メイン搬送ロボットTR1よりも搬送負荷が高い。よって、インデクサロボットIR1の待機時間を短縮させることにより、インデクサロボットIR1が基板処理装置1の処理速度を律することを抑制または防止することができる。さらに、第1実施形態では、第2反転ユニット26の高さの増加が抑制または防止されているので、インデクサロボットIR1が、2つのハンド9を上下方向D1に移動させる範囲の増加が抑制または防止されている。これにより、インデクサロボットIR1が基板Wを搬送する範囲の増加が抑制または防止されており、インデクサロボットIR1による基板Wの搬送時間の増加が抑制または防止されている。
【0068】
図6は、この発明の第2実施形態に係る第2反転ユニット226によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR2、メイン搬送ロボットTR1、および第2反転ユニット226の動作の一例を説明するための概略図である。この図6において、前述の図1〜図5に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0069】
この第2実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR2が一度に搬送する基板Wの枚数と、第2反転ユニット226に備えられた基板保持部27の個数である。
すなわち、第2実施形態では、インデクサロボットIR2が一度に搬送する基板Wの枚数が3である。また、第1実施形態と同様に、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット226から基板Wを1枚ずつ搬出させる。したがって、第2実施形態では、nが3であり、mが1である。そのため、第2反転ユニット226に備えられた基板保持部27の個数(n+m)は、4である。したがって、4個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、および第4基板保持部27d)が第2反転ユニット226に備えられている。
【0070】
以下では、第2反転ユニット226によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR2、メイン搬送ロボットTR1、および第2反転ユニット226の動作の一例を具体的に説明する。
図6(a)に示すように、制御部4は、インデクサロボットIR2によって、3枚の基板WをキャリアCから第2反転ユニット226に同時に搬送させる。そして、図6(a)に示すように、制御部4は、インデクサロボットIR2によって、この3枚の基板Wを、上下方向D1の一方端から3番目までの3個の基板保持部27(図6(a)では、第1基板保持部27a、第2基板保持部27b、および第3基板保持部27c)に同時に搬入させる(第1搬入工程)。
【0071】
その後、図6(b)に示すように、制御部4は、回転機構28によって、4個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図6(c)に示すように、4個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27dの順番で上下方向D1に配列されていた4個の基板保持部27が、上から第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0072】
制御部4は、4個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、3個の基板保持部27にそれぞれ搬入された3枚の基板Wを搬出させ、この3枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図6(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第3基板保持部27cに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第2基板保持部27bに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0073】
図6(d)に示すように、第2基板保持部27bに保持された基板W(2枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から3番目までの3個の基板保持部27(図6(d)では、第4基板保持部27d、第3基板保持部27c、および第2基板保持部27b)が空になっている。図6(d)に示すように、制御部4は、メイン搬送ロボットTR1によって2枚目の基板Wを搬出させた後、インデクサロボットIR2によって、上下方向D1の一方端から3番目までの3個の基板保持部27に3枚の基板Wを同時に搬入させる(第2搬入工程)。
【0074】
また、制御部4は、再びインデクサロボットIR2によって3枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(3枚目の基板W)を搬出させた後に、回転機構28によって、4個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット226から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0075】
メイン搬送ロボットTR1が2枚目の基板Wを搬出した後に行われるインデクサロボットIR2による3枚の基板Wの搬入は、メイン搬送ロボットTR1が3枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR2による3枚の基板Wの搬入と、メイン搬送ロボットTR1による3枚目の基板Wの搬出とが並行して行われてもよい。
【0076】
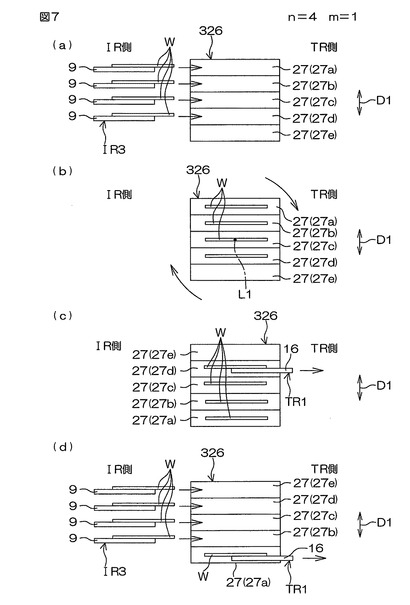
図7は、この発明の第3実施形態に係る第2反転ユニット326によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR3、メイン搬送ロボットTR1、および第2反転ユニット326の動作の一例を説明するための概略図である。この図7において、前述の図1〜図6に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0077】
この第3実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR3が一度に搬送する基板Wの枚数と、第2反転ユニット326に備えられた基板保持部27の個数である。
すなわち、第3実施形態では、インデクサロボットIR3が一度に搬送する基板Wの枚数が4である。また、第1実施形態と同様に、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット326から基板Wを1枚ずつ搬出させる。したがって、第3実施形態では、nが4であり、mが1である。そのため、第2反転ユニット326に備えられた基板保持部27の個数(n+m)は、5である。したがって、5個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、および第5基板保持部27e)が第2反転ユニット326に備えられている。
【0078】
以下では、第2反転ユニット326によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR3、メイン搬送ロボットTR1、および第2反転ユニット326の動作の一例を具体的に説明する。
図7(a)に示すように、制御部4は、インデクサロボットIR3によって、4枚の基板WをキャリアCから第2反転ユニット326に同時に搬送させる。そして、図7(a)に示すように、制御部4は、インデクサロボットIR3によって、この4枚の基板Wを、上下方向D1の一方端から4番目までの4個の基板保持部27(図7(a)では、第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、および第4基板保持部27d)に同時に搬入させる(第1搬入工程)。
【0079】
その後、図7(b)に示すように、制御部4は、回転機構28によって、5個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図7(c)に示すように、5個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27eの順番で上下方向D1に配列されていた4個の基板保持部27が、上から第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0080】
制御部4は、5個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、4個の基板保持部27にそれぞれ搬入された4枚の基板Wを搬出させ、この4枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図7(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第4基板保持部27dに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第3基板保持部27cに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0081】
図7(d)に示すように、第2基板保持部27bに保持された基板W(3枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から4番目までの4個の基板保持部27(図7(d)では、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、および第2基板保持部27b)が空になっている。図7(d)に示すように、制御部4は、メイン搬送ロボットTR1によって3枚目の基板Wを搬出させた後、インデクサロボットIR3によって、上下方向D1の一方端から4番目までの4個の基板保持部27に4枚の基板Wを同時に搬入させる(第2搬入工程)。
【0082】
また、制御部4は、再びインデクサロボットIR3によって4枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(4枚目の基板W)を搬出させた後に、回転機構28によって、5個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット326から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0083】
メイン搬送ロボットTR1が3枚目の基板Wを搬出した後に行われるインデクサロボットIR3による4枚の基板Wの搬入は、メイン搬送ロボットTR1が4枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR3による4枚の基板Wの搬入と、メイン搬送ロボットTR1による4枚目の基板Wの搬出とが並行して行われてもよい。
【0084】
図8は、この発明の第4実施形態に係る第2反転ユニット426によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR4、メイン搬送ロボットTR1、および第2反転ユニット426の動作の一例を説明するための概略図である。この図8において、前述の図1〜図7に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0085】
この第4実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR4が一度に搬送する基板Wの枚数と、第2反転ユニット426に備えられた基板保持部27の個数である。
すなわち、第4実施形態では、インデクサロボットIR4が一度に搬送する基板Wの枚数が5である。また、第1実施形態と同様に、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット426から基板Wを1枚ずつ搬出させる。したがって、第4実施形態では、nが5であり、mが1である。そのため、第2反転ユニット426に備えられた基板保持部27の個数(n+m)は、6である。したがって、6個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、および第6基板保持部27f)が第2反転ユニット426に備えられている。
【0086】
以下では、第2反転ユニット426によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR4、メイン搬送ロボットTR1、および第2反転ユニット426の動作の一例を具体的に説明する。
図8(a)に示すように、制御部4は、インデクサロボットIR4によって、5枚の基板WをキャリアCから第2反転ユニット426に同時に搬送させる。そして、図8(a)に示すように、制御部4は、インデクサロボットIR4によって、この5枚の基板Wを、上下方向D1の一方端から5番目までの5個の基板保持部27(図8(a)では、第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、および第5基板保持部27e)に同時に搬入させる(第1搬入工程)。
【0087】
その後、図8(b)に示すように、制御部4は、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図8(c)に示すように、6個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、第6基板保持部27fの順番で上下方向D1に配列されていた6個の基板保持部27が、上から第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0088】
制御部4は、6個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、5個の基板保持部27にそれぞれ搬入された5枚の基板Wを搬出させ、この5枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図8(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第5基板保持部27eに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第4基板保持部27dに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0089】
図8(d)に示すように、第2基板保持部27bに保持された基板W(4枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から5番目までの5個の基板保持部27(図8(d)では、第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、および第2基板保持部27b)が空になっている。図8(d)に示すように、制御部4は、メイン搬送ロボットTR1によって4枚目の基板Wを搬出させた後、インデクサロボットIR4によって、上下方向D1の一方端から5番目までの5個の基板保持部27に5枚の基板Wを同時に搬入させる(第2搬入工程)。
【0090】
また、制御部4は、再びインデクサロボットIR4によって5枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(5枚目の基板W)を搬出させた後に、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット426から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0091】
メイン搬送ロボットTR1が4枚目の基板Wを搬出した後に行われるインデクサロボットIR4による5枚の基板Wの搬入は、メイン搬送ロボットTR1が5枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR4による5枚の基板Wの搬入と、メイン搬送ロボットTR1による5枚目の基板Wの搬出とが並行して行われてもよい。
【0092】
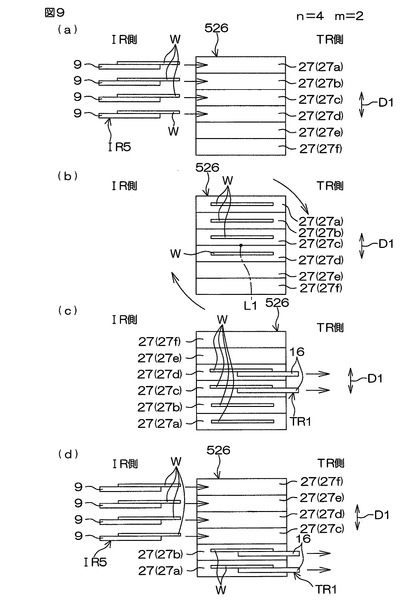
図9は、この発明の第5実施形態に係る第2反転ユニット526によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR5、メイン搬送ロボットTR1、および第2反転ユニット526の動作の一例を説明するための概略図である。この図9において、前述の図1〜図8に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0093】
この第5実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR5が一度に搬送する基板Wの枚数と、第2反転ユニット526に備えられた基板保持部27の個数である。
すなわち、第5実施形態では、インデクサロボットIR5が一度に搬送する基板Wの枚数が4である。また、第1実施形態とは異なり、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット526から基板Wを2枚ずつ搬出させる。したがって、第5実施形態では、nが4であり、mが2である。そのため、第2反転ユニット526に備えられた基板保持部27の個数(n+m)は、6である。したがって、6個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、および第6基板保持部27f)が第2反転ユニット526に備えられている。
【0094】
以下では、第2反転ユニット526によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR5、メイン搬送ロボットTR1、および第2反転ユニット526の動作の一例を具体的に説明する。
図9(a)に示すように、制御部4は、インデクサロボットIR5によって、4枚の基板WをキャリアCから第2反転ユニット526に同時に搬送させる。そして、図9(a)に示すように、制御部4は、インデクサロボットIR5によって、この4枚の基板Wを、上下方向D1の一方端から4番目までの4個の基板保持部27(図9(a)では、第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、および第4基板保持部27d)に同時に搬入させる(第1搬入工程)。
【0095】
その後、図9(b)に示すように、制御部4は、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図9(c)に示すように、6個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、第6基板保持部27fの順番で上下方向D1に配列されていた6個の基板保持部27が、上から第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0096】
制御部4は、6個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、4個の基板保持部27にそれぞれ搬入された4枚の基板Wを搬出させ、この4枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図9(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第4基板保持部27dに保持された基板W(1枚目の基板W)と、第3基板保持部27cに保持された基板W(2枚目の基板W)とを同時に搬出させ、この2枚の基板Wを2つの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第2基板保持部27bに保持された基板W(3枚目の基板W)と、第1基板保持部27aに保持された基板W(4枚目の基板W)とを同時に搬出させ、この2枚の基板Wを2つの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に2枚ずつ基板Wを搬出させる。
【0097】
図9(d)に示すように、第4基板保持部27dおよび第3基板保持部27cにそれぞれ保持された2枚の基板W(1枚目の基板Wと2枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から4番目までの4個の基板保持部27(図9(d)では、第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、および第3基板保持部27c)が空になっている。図9(d)に示すように、制御部4は、メイン搬送ロボットTR1によって1枚目および2枚目の基板Wを搬出させた後、インデクサロボットIR5によって、上下方向D1の一方端から4番目までの4個の基板保持部27に4枚の基板Wを同時に搬入させる(第2搬入工程)。
【0098】
また、制御部4は、再びインデクサロボットIR5によって4枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第2基板保持部27bおよび第1基板保持部27aにそれぞれ保持された2枚の基板W(3枚目の基板Wと4枚目の基板W)を搬出させた後に、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット526から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0099】
メイン搬送ロボットTR1が1枚目および2枚目の基板Wを搬出した後に行われるインデクサロボットIR5による4枚の基板Wの搬入は、メイン搬送ロボットTR1が3枚目および4枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR5による4枚の基板Wの搬入と、メイン搬送ロボットTR1による3枚目および4枚目の基板Wの搬出とが並行して行われてもよい。
【0100】
以上のように第1〜第5実施形態のいずれの実施形態においても、制御部4は、インデクサロボットIR1〜IR5によって搬入された全ての基板W(n枚の基板W)が搬出される前に、上側のn個の基板保持部27を空にさせる。したがって、制御部4は、インデクサロボットIR1〜IR5によって搬入された全ての基板Wが搬出される前に、再びインデクサロボットIR1〜IR5によってn枚の基板Wを上側のn個の基板保持部27に搬入させることができる。そのため、制御部4は、インデクサロボットIR1〜IR5によって搬入された全ての基板Wが搬出されるまでインデクサロボットIR1〜IR5を待機させなくてもよい。これにより、インデクサロボットIR1〜IR5の待機時間を短縮することができる。また、基板保持部27の個数は、n+m(mは、nよりも小さい正の整数)であり、インデクサロボットIR1が一度に搬送する基板Wの枚数(n枚)の2倍(2n)より少ない。したがって、インデクサロボットIR1が一度に搬送する基板Wの枚数の2倍の個数の基板保持部27が設けられる場合に比べて、基板処理装置1の大型化を抑制または防止することができる。
【0101】
この発明の実施の形態の説明は以上であるが、この発明は、前述の実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。たとえば、前述の実施形態では、第2反転ユニットを経由してインデクサロボット側からメイン搬送ロボット側に複数の基板を搬送させて、インデクサロボットの待機時間を短縮させる場合について説明した。しかし、第2反転ユニットを経由してインデクサロボット側からメイン搬送ロボット側に複数の基板を搬送させる場合と同様に、第2反転ユニットを経由してメイン搬送ロボット側からインデクサロボット側に複数の基板を搬送させてもよい。
【0102】
具体的には、制御部4は、メイン搬送ロボットによって、n枚の基板Wを基板処理部12から第2反転ユニットに同時に搬送させ、このn枚の基板Wを第2反転ユニットに搬入させてもよい。そして、制御部4は、第2反転ユニットによって各基板Wの表裏を反転させた後、第2反転ユニットに保持されたn枚の基板Wをm枚ずつインデクサロボットによって第2反転ユニットから搬出させてもよい。これにより、メイン搬送ロボットの待機時間を短縮することができる。
【0103】
また、前述の実施形態では、第2反転ユニットの上方に、メイン搬送ロボット側からしかアクセスできない第1反転ユニットが設けられている場合について説明した。しかし、第1反転ユニットが、第2反転ユニットと同様の構成を有しており、インデクサロボット側およびメイン搬送ロボット側の両方からアクセスできるように構成されていてもよい。この場合、インデクサロボット側からメイン搬送ロボット側に複数の基板を搬送する場合に、一方の反転ユニットを用い、メイン搬送ロボット側からインデクサロボット側に複数の基板を搬送する場合に、他方の反転ユニットを用いてもよい。
【0104】
また、前述の実施形態では、複数の基板保持部27が上下方向D1に配列されている場合について説明した。しかし、複数の基板保持部27は、上下方向D1以外の予め定められた方向に配列されていてもよい。さらに、前述の実施形態では、各基板保持部27は、基板Wを挟持して保持する構成を有している場合について説明した。しかし、各基板保持部27は、挟持に限らず、吸着などの他の方法によって基板Wを保持するように構成されていてもよい。さらにまた、前述の実施形態では、各基板保持部27が同様の構成を有している場合について説明した。しかし、構成の異なる複数種の基板保持部が第2反転ユニットに備えられていてもよい。
【0105】
また、前述の実施形態では、制御部4が、第1搬入工程および第2搬入工程の2つの工程において、インデクサロボットによってn枚の基板Wをn個の基板保持部27に同時に搬入させる場合について説明した。しかし、制御部4は、第1搬入工程および第2搬入工程の少なくとも一方の工程において、インデクサロボットによってn枚の基板Wを複数回に分けてn個の基板保持部27に搬入させてもよい。
【0106】
また、前述の実施形態では、第1搬入工程および第2搬入工程において、インデクサロボットIR1によって、上下方向D1に配列された複数の基板保持部27のうち上側の基板保持部27に基板Wを1枚ずつ搬入させるが、上下方向D1に配列された複数の基板保持部27のうち下側の基板保持部27に基板Wを搬入してもよい。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0107】
1 基板処理装置
4 制御部(制御手段)
6 キャリア保持部(第1保持部、収容部材保持部)
7 IR移動機構(移動機構)
12 基板処理部(第2保持部)
27 基板保持部
28 回転機構
C キャリア(収容部材)
D1 上下方向(配列方向)
IR1 インデクサロボット(第1搬送ロボット)
IR2 インデクサロボット(第1搬送ロボット)
IR3 インデクサロボット(第1搬送ロボット)
IR4 インデクサロボット(第1搬送ロボット)
IR5 インデクサロボット(第1搬送ロボット)
TR1 メイン搬送ロボット(第2搬送ロボット)
【技術分野】
【0001】
この発明は、基板を処理する基板処理装置および、前記基板処理装置における基板搬送方法に関する。処理対象となる基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
半導体装置や液晶表示装置などの製造工程では、半導体ウエハや液晶表示装置用ガラス基板などの基板に対して処理液を用いた処理が行われる。基板を1枚ずつ処理する枚葉式の基板処理装置は、たとえば特許文献1に開示されている。この基板処理装置は、複数のキャリアを保持するキャリア保持部と、基板を処理する基板処理部と、キャリア保持部と基板処理部との間で上下に積層された2つの反転ユニットと、各反転ユニットとキャリア保持部との間で基板を搬送するインデクサロボットと、各反転ユニットと基板処理部との間で基板を搬送するメイン搬送ロボットとを備えている。各反転ユニットは、水平に保持した基板を水平軸線(回転軸線)まわりに180度回転させることにより、基板の表裏を反転させる。インデクサロボットおよびメイン搬送ロボットは、各反転ユニットにアクセス可能である。
【0003】
各反転ユニットは、基板を水平に保持する複数の基板保持部を備えている。インデクサロボットが一度に搬送する基板の枚数と、メイン搬送ロボットが一度に搬送する基板の枚数とが異なる場合は、大きい方の枚数の2倍の個数の基板保持部が各反転ユニットに備えられる。また、インデクサロボットが一度に搬送する基板の枚数と、メイン搬送ロボットが一度に搬送する基板の枚数とが等しい場合は、各搬送ロボット(インデクサロボットおよびメイン搬送ロボットのそれぞれ)が一度に搬送する基板の枚数の2倍の個数の基板保持部が各反転ユニットに備えられる。たとえば、各搬送ロボットが一度に搬送する基板の枚数が1である場合には、2個の基板保持部が各反転ユニットに備えられる。さらに、各反転ユニットに備えられた複数の基板保持部は、回転軸線を挟んで対称に配置される。たとえば、2個の基板保持部が備えられている場合は、2個の基板保持部が回転軸線を挟んで上下対称に配置される。
【0004】
2個の基板保持部が各反転ユニットに備えられている場合に、一方の反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を1枚ずつ搬送するときには、たとえば、以下の一連の動作が繰り返し行われる。すなわち、インデクサロボットは、キャリアから搬出した基板を一方の反転ユニットの上側の基板保持部に搬入する。その後、一方の反転ユニットは、2個の基板保持部を回転軸線まわりに180度回転させる。これにより、基板が搬入された上側の基板保持部が回転軸線の下側に移動し、基板が搬入されていない(空の)下側の基板保持部が回転軸線の上側に移動する。メイン搬送ロボットは、一方の反転ユニットによって表裏が反転された基板を一方の反転ユニットの下側の基板保持部から搬出する。
【0005】
同様に、2個の基板保持部が各反転ユニットに備えられている場合に、他方の反転ユニットによって基板の表裏を反転させながら、基板処理部からキャリア保持部に複数枚の基板を1枚ずつ搬送するときには、たとえば、以下の一連の動作が繰り返し行われる。すなわち、メイン搬送ロボットは、基板処理部から搬出した基板を他方の反転ユニットの上側の基板保持部に搬入する。その後、他方の反転ユニットは、2個の基板保持部を回転軸線まわりに180度回転させる。これにより、基板が搬入された上側の基板保持部が回転軸線の下側に移動し、基板が搬入されていない(空の)下側の基板保持部が回転軸線の上側に移動する。インデクサロボットは、他方の反転ユニットによって表裏が反転された基板を他方の反転ユニットの下側の基板保持部から搬出する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−252888号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前述のような基板処理装置において、基板処理装置のスループット(単位時間当たりの基板の処理枚数)を増加させることが望まれている。スループットを増加させる方法としては、たとえば、基板の搬送時間を短縮することが考えられる。基板の搬送時間は、たとえば、インデクサロボットおよびメイン搬送ロボットの待機時間を短縮することにより短縮される。
【0008】
前述のように一方の反転ユニットを経由してキャリアから基板処理部に複数枚の基板を搬送させれば、インデクサロボットは、メイン搬送ロボットによって一方の反転ユニットから基板が搬出される前に、次の基板を一方の反転ユニットに搬入することができる。これにより、インデクサロボットの待機時間を短縮することができる。
同様に、前述のように他方の反転ユニットを経由して基板処理部からキャリアに複数枚の基板を搬送させれば、メイン搬送ロボットは、インデクサロボットによって他方の反転ユニットから基板が搬出される前に、次の基板を他方の反転ユニットに搬入することができる。これにより、メイン搬送ロボットの待機時間を短縮することができる。
【0009】
しかしながら、前述の基板処理装置では、各搬送ロボットが一度に搬送する基板の枚数の2倍の基板保持部が各反転ユニットに備えられる。したがって、各搬送ロボットが一度に搬送する基板の枚数が増えるほど、各反転ユニットが大型化する。各反転ユニットは、基板処理装置内の非常に限られた空間に配置されるから、小型であることが好ましい。
そこで、この発明の目的は、搬送ロボットの待機時間を短縮できるとともに、装置の大型化が抑制または防止された基板処理装置および基板搬送方法を提供することである。
【課題を解決するための手段】
【0010】
前記目的を達成するための請求項1記載の発明は、基板(W)をそれぞれ保持する第1保持部(6)および第2保持部(12)と、予め定める配列方向(D1)に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部(27)と、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構(28)と、前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボット(IR1〜IR5)と、前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボット(TR1)と、前記第1搬送ロボットを制御することにより、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、前記回転機構を制御することにより、前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、前記第2搬送ロボットを制御することにより、前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、前記第1搬送ロボットを制御することにより、前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを実行する制御手段(4)と含む、基板処理装置(1)である。
【0011】
なお、この項において、括弧内の英数字は、後述の実施形態における対応構成要素の参照符号を表すものであるが、これらの参照符号により特許請求の範囲を限定する趣旨ではない。
この構成によれば、基板保持部を経由して第1保持部と第2保持部との間で複数枚の基板が搬送される。具体的には、第1保持部に保持された基板は、第1搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第2搬送ロボットによって第2保持部に搬送される。一方、第2保持部に保持された基板は、第2搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第1搬送ロボットによって第1保持部に搬送される。
【0012】
制御手段は、第1搬送ロボットによって第1保持部からn枚の基板を搬出させる。また、制御手段は、第2搬送ロボットによって基板保持部からm枚の基板を搬出させる。nは、2以上の整数であり、mは、nよりも小さい正の整数で、かつnの約数である。基板保持部は、n+m個設けられている。n+m個の基板保持部は、予め定める配列方向に配列されている。したがって、n+m個の基板保持部は、配列方向に配列した状態で基板をそれぞれ保持することができる。さらに、n+m個の基板保持部は、基板の表裏が反転するように一括して回転可能である。回転機構は、回転前とは逆の順番でn+m個の基板保持部が配列方向に配列するようにn+m個の基板保持部を回転させる。これにより、n+m個の基板保持部に保持された基板の表裏が反転される。
【0013】
基板の表裏を反転させながら、第1保持部と第2保持部との間で複数枚の基板を搬送する場合には、制御手段は、たとえば、以下のように第1搬送ロボット等を制御する。
すなわち、制御手段は、第1搬送ロボットを制御することにより、第1搬送ロボットによって、第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて配列方向の一方端からn番目までのn個の基板保持部に搬入させる(第1搬入工程)。第1搬入工程が行われた後は、配列方向の一方側のn個の基板保持部のそれぞれに基板が搬入されており、残りのm個の基板保持部には基板が搬入されていない。
【0014】
制御手段は、回転機構を制御することにより、第1搬入工程の後に、回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番でn+m個の基板保持部が配列方向に配列するようにn+m個の基板保持部を回転させる(反転工程)。反転工程が行われた後は、配列方向の一方側のn個の基板保持部が、配列方向の他方側に移動している。したがって、反転工程が行われた後は、配列方向の一方側のm個の基板保持部には基板が搬入されておらず、残りのn個の基板保持部のそれぞれに基板が搬入されている。
【0015】
制御手段は、第2搬送ロボットを制御することにより、反転工程の後に、第2搬送ロボットによって、第1搬入工程においてn個の基板保持部に搬入されたn枚の基板を配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を第2保持部に搬入させる(搬出工程)。すなわち、反転工程が行われた後は、配列方向の他方側のn個の基板保持部にn枚の基板が搬入されている。制御手段は、このn枚の基板のうち配列方向の一方端に位置する基板からm番目までのm枚の基板を第2搬送ロボットによって搬出させる。その後、制御手段は、残りの(n−m)枚の基板のうち配列方向の一方端に位置する基板からm番目までのm枚の基板を第2搬送ロボットによって搬出させる。制御手段は、このようにして、第2搬送ロボットによるm枚の基板の搬出を繰り返し実行させる。mは、nよりも小さい正の整数で、かつnの約数であるから、これにより、n枚の基板がn個の基板保持部から搬出される。
【0016】
一方、制御手段は、第1搬送ロボットを制御することにより、反転工程の後に、第1搬送ロボットによって、第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて配列方向の一方端からn番目までのn個の基板保持部に搬入させる(第2搬入工程)。反転工程が行われた後であって、第2搬送ロボットが基板保持部から基板を搬出する前には、配列方向の一方側のm個の基板保持部には基板が搬入されておらず、残りのn個の基板保持部のそれぞれに基板が搬入されている。つまり、配列方向の一方側のn個の基板保持部のいずれかに基板が搬入されているから、制御手段は、再び第1搬送ロボットによってn枚の基板を搬入させる前に、第2搬送ロボットによるm枚の基板の搬出を1回または複数回実行させて、配列方向の一方側のn個の基板保持部を空にさせる。
【0017】
具体的には、n=2、m=1の場合を想定する。この場合、n+m=3であるから、3個の基板保持部が設けられている。したがって、第1搬送工程では、配列方向の一方側の2個(n個)の基板保持部に基板が搬入される。そのため、反転工程が行われた後であって、第2搬送ロボットによる基板の搬出が行われる前は、配列方向の一方端に位置する1個(m個)の基板保持部には基板が搬入されておらず、残りの2個(n個)の基板保持部に基板が搬入されている。よって、第2搬送ロボットが1枚(m枚)の基板を最初に搬出した後は、配列方向の一方端から2番目(m+m番目)までの2個(2m個)の基板保持部には基板が搬入されておらず、残りの1個(n−m個)の基板保持部に基板が搬入されている。すなわち、第1搬送ロボットによって搬入された全ての基板(n枚の基板)が搬出される前に、配列方向の一方側の2個(n個)の基板保持部が空になっている。したがって、制御手段は、第2搬送ロボットによる1枚(m枚)の基板の搬出を1回実行させた後に、第1搬送ロボットによって配列方向の一方側の2個(n個)の基板保持部に2枚(n枚)の基板を搬入させる(第2搬入工程)。
【0018】
次に、n=3、m=1の場合を想定する。この場合、反転工程が行われた後であって、第2搬送ロボットによる基板の搬出が行われる前は、配列方向の一方端に位置する1個(m個)の基板保持部には基板が搬入されておらず、残りの3個(n個)の基板保持部に基板が搬入されている。この3個(n個)の基板保持部に保持された3枚(n枚)の基板は、第2搬送ロボットによって、配列方向の一方側から順に1枚(m枚)ずつ搬出される。したがって、第2搬送ロボットによる1枚(m枚)の基板の搬出が2回行われた後は、配列方向の一方端から3番目(m+2m番目)までの3個(3m個)の基板保持部には基板が搬入されておらず、残りの1個(n−2m個)の基板保持部に基板が搬入されている。すなわち、第1搬送ロボットによって搬入された全ての基板(n枚の基板)が搬出される前に、配列方向の一方側の3個(n個)の基板保持部が空になっている。したがって、制御手段は、第2搬送ロボットによる1枚(m枚)の基板の搬出を2回実行させた後に、第1搬送ロボットによって配列方向の一方側の3個(n個)の基板保持部に3枚(n枚)の基板を搬入させる(第2搬入工程)。
【0019】
このように、制御手段は、第1搬送ロボットによって搬入された全ての基板が搬出される前に、配列方向の一方側のn個の基板保持部を空にさせる。したがって、制御手段は、第1搬送ロボットによって搬入された全ての基板が搬出される前に、再び第1搬送ロボットによってn枚の基板を配列方向の一方端からn番目までのn個の基板保持部に搬入させることができる。そのため、制御手段は、第1搬送ロボットによって搬入された全ての基板が搬出されるまで第1搬送ロボットを待機させなくてもよい。これにより、第1搬送ロボットの待機時間を短縮することができる。また、基板保持部の個数は、n+m(mは、nよりも小さい正の整数)であり、第1搬送ロボットが一度に搬送する基板の枚数(n枚)の2倍(2n)より少ない。したがって、第1搬送ロボットが一度に搬送する基板の枚数の2倍の個数の基板保持部が設けられる場合に比べて、基板処理装置の大型化を抑制または防止することができる。
【0020】
請求項2記載の発明は、前記制御手段は、前記搬出工程と並行して、前記第2搬入工程を実行するように構成されている、請求項1記載の基板処理装置である。
この構成によれば、第2搬送ロボットによる基板の搬出と並行して、第1搬送ロボットによる基板の搬入が行われる。したがって、第1搬送ロボットによって搬入された全ての基板が第2搬送ロボットによって搬出された後に、第1搬送ロボットによる基板の搬入が行われる場合に比べて、基板の搬送時間を短縮することができる。これにより、基板処理装置のスループットを増加させることができる。
【0021】
前記制御手段は、前記第1搬入工程および第2搬入工程の少なくとも一方の工程において、前記第1搬送ロボットによってn枚の基板を複数回に分けてn個の前記基板保持部に搬入させるように構成されていてもよいし、請求項3記載の発明のように、前記第1搬入工程および第2搬入工程の少なくとも一方の工程において、前記第1搬送ロボットによってn枚の基板をそれぞれn個の前記基板保持部に同時に搬入させるように構成されていてもよい。n枚の基板を同時に搬入することにより、基板の搬入時間を短縮することができる。
【0022】
請求項4記載の発明は、nは、mに2を掛けた値である、請求項1〜3のいずれか一項に記載の基板処理装置である。
反転工程が行われた後であって、第2搬送ロボットによる基板の搬出が行われる前(搬出工程が行われる前)は、配列方向の一方側のm個の基板保持部には基板が搬入されておらず、残りのn個の基板保持部に基板が搬入されている。搬出工程では、n個の基板保持部に保持されたn枚の基板が、第2搬送ロボットによって、配列方向の一方端に位置する基板から順にm枚ずつ搬出される。したがって、第2搬送ロボットによる基板の搬出が1回行われると、配列方向の一方側の(m+m)個の基板保持部が空になる。つまり、m+m=2×m=nであるから、第2搬送ロボットによるm枚の基板の搬出が1回行われると、配列方向の一方側のn個の基板保持部が空になる。そのため、制御手段は、第2搬送ロボットによるm枚の基板の搬出が1回行われた後に、第1搬送ロボットによる基板の搬入(第2搬入工程)を開始することができる。すなわち、制御手段は、第2搬送ロボットによるm枚の基板の搬出が複数回行われるまで第1搬送ロボットを待機させなくてもよい。これにより、第1搬送ロボットの待機時間を短縮することができる。
【0023】
請求項5記載の発明は、前記第1保持部は、複数枚の基板を収容する複数の収容部材(C)を保持する収容部材保持部(6)を含み、前記第2保持部は、基板を保持して、保持した基板を処理する基板処理部(12)を含み、前記基板処理装置は、前記第1搬送ロボットを移動させる移動機構(7)をさらに含み、前記制御手段は、前記移動機構を制御することにより、前記複数の収容部材と前記基板保持部との間で前記第1搬送ロボットを移動させるように構成されている、請求項1〜4のいずれか一項に記載の基板処理装置である。
【0024】
この構成によれば、基板保持部を経由して収容部材保持部と基板処理部との間で複数枚の基板が搬送される。具体的には、収容部材保持部に保持された各収容部材に収容された基板は、第1搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第2搬送ロボットによって基板処理部に搬送される。これにより、基板が処理される。基板処理部で処理された基板は、第2搬送ロボットによって基板保持部に搬送される。そして、基板保持部に搬送された基板は、第1搬送ロボットによって収容部材保持部に保持された各収容部材に搬送される。
【0025】
制御手段は、移動機構を制御することにより、複数の収容部材と基板保持部との間で第1搬送ロボットを移動させる。したがって、第1搬送ロボットが基板を搬送する範囲は、第2搬送ロボットが基板を搬送する範囲よりも広い。そのため、第1搬送ロボットは、第2搬送ロボットよりも搬送負荷が高い。よって、第1搬送ロボットの待機時間を短縮させることにより、第1搬送ロボットが基板処理装置の処理速度を律することを抑制または防止することができる。
【0026】
請求項6記載の発明は、基板(W)をそれぞれ保持する第1保持部(6)および第2保持部(12)と、予め定める配列方向(D1)に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部(27)と、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構(28)と、前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボット(IR1〜IR5)と、前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボット(TR1)とを備える基板処理装置(1)において、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを備える基板搬送方法である。
【0027】
この発明によれば、請求項1に関連して述べた効果と同様な効果を奏することができる。
【図面の簡単な説明】
【0028】
【図1】この発明の第1実施形態に係る基板処理装置の平面図である。
【図2】この発明の第1実施形態に係る基板処理装置を図1における矢印IIが示す方向から見た図である。
【図3】図1におけるIII−III線に沿う基板処理装置の概略図である。
【図4】この発明の第1実施形態に係る第2反転ユニットを図3における矢印IVが示す方向から見た図である。
【図5】この発明の第1実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図6】この発明の第2実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図7】この発明の第3実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図8】この発明の第4実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【図9】この発明の第5実施形態に係る反転ユニットによって基板の表裏を反転させながら、キャリア保持部から基板処理部に複数枚の基板を搬送させるときのインデクサロボット、メイン搬送ロボット、および第2反転ユニットの動作の一例を説明するための概略図である。
【発明を実施するための形態】
【0029】
以下では、本発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、この発明の第1実施形態に係る基板処理装置1の平面図である。図2は、この発明の第1実施形態に係る基板処理装置1を図1における矢印IIが示す方向から見た図であり、図3は、図1におけるIII−III線に沿う基板処理装置1の概略図である。
基板処理装置1は、半導体ウエハ等の基板Wを1枚ずつ処理する枚葉式の基板処理装置である。図1に示すように、基板処理装置1は、インデクサブロック2と、インデクサブロック2に結合された処理ブロック3と、基板処理装置1を制御する制御部4(制御手段)とを備えている。インデクサブロック2と処理ブロック3との境界部分には、基板受け渡し部5が設けられている。
【0030】
インデクサブロック2は、キャリア保持部6(第1保持部、収容部材保持部)と、インデクサロボットIR1(第1搬送ロボット)と、インデクサロボット移動機構(移動機構。以下では、「IR移動機構7」という。)とを備えている。キャリア保持部6は、複数のキャリアC(収容部材)を保持している。複数のキャリアCは、水平に延びるキャリア配列方向Uに沿って配列された状態でキャリア保持部6に保持されている。インデクサロボットIR1は、キャリア保持部6と処理ブロック3との間に配置されている。IR移動機構7は、キャリア配列方向Uに沿ってインデクサロボットIR1を水平移動させる。インデクサロボットIR1は、IR移動機構7によって、各キャリアCに対向する位置および基板受け渡し部5に対向する位置に配置される。インデクサロボットIR1は、各キャリアCと基板受け渡し部5との間で基板Wの搬送を行う。さらに、インデクサロボットIR1は、キャリアCおよび基板受け渡し部5に基板Wを搬入する搬入動作と、キャリアCおよび基板受け渡し部5から基板Wを搬出する搬出動作とを行う。
【0031】
図1に示すように、インデクサロボットIR1は、たとえば、2つのアーム8と、2つのハンド9とを備えている。インデクサロボットIR1は、2つのアーム8を互いに独立して水平に伸縮させることができる。各アーム8の先端には、ハンド9が1つ取り付けられている。2つのハンド9は、上下方向D1(配列方向)に間隔を空けて水平に配置されている(図1では、2つのハンド9が上下に重なり合っている。)。インデクサロボットIR1は、各ハンド9によって基板Wを支持することにより、2枚の基板Wを水平に保持することができる。インデクサロボットIR1に備えられるハンド9の数は、2つに限らず、1つ、または3つ以上であってもよい。ハンド9が3つ以上備えられる場合は、複数のハンド9が上下方向D1に間隔を空けて1つのアーム8に取り付けられていてもよいし、ハンド9ごとに専用のアーム8が設けられていてもよい。
【0032】
また、図示はしないが、インデクサロボットIR1は、インデクサロボットIR1に内蔵された第1旋回機構および第1昇降駆動機構を備えている。第1旋回機構は、2つのハンド9を対応するアーム8とともに鉛直軸線まわりに回転させる。また、第1昇降駆動機構は、2つのハンド9を対応するアーム8とともに上下方向D1に昇降させる。これにより、インデクサロボットIR1は、各キャリアCおよび基板受け渡し部5に各ハンド9を対向させることができる。
【0033】
一方、処理ブロック3は、基板Wを処理する複数(たとえば8つ)の基板処理部12(第2保持部)と、メイン搬送ロボットTR1(第2搬送ロボット)とを備えている。8つの基板処理部12のうち4つの基板処理部12は、第1処理ユニット13を構成しており、残り4つの基板処理部12は、第2処理ユニット14を構成している。図2に示すように、第1処理ユニット13を構成する4つの基板処理部12は、上下に積層されており、第2処理ユニット14を構成する4つの基板処理部12は、上下に積層されている。図1に示すように、第1処理ユニット13および第2処理ユニット14は、メイン搬送ロボットTR1を間に挟んでキャリア配列方向Uに対向するように配置されている。さらに、第1処理ユニット13および第2処理ユニット14は、キャリア保持部6に対して、キャリア配列方向Uに直交する水平方向に間隔を空けて配置されている。メイン搬送ロボットTR1は、各基板処理部12と基板受け渡し部5との間で基板Wの搬送を行う。さらに、メイン搬送ロボットTR1は、基板処理部12および基板受け渡し部5に基板Wを搬入する搬入動作と、基板処理部12および基板受け渡し部5から基板Wを搬出する搬出動作とを行う。
【0034】
図1に示すように、メイン搬送ロボットTR1は、2つのアーム15と、2つのハンド16とを備えている。メイン搬送ロボットTR1は、2つのアーム15を互いに独立して水平に伸縮させることができる。各アーム15の先端には、ハンド16が1つ取り付けられている。2つのハンド16は、上下方向D1に間隔を空けて水平に配置されている(図1では、2つのハンド16が上下に重なり合っている。)。メイン搬送ロボットTR1は、各ハンド16によって基板Wを支持することにより、2枚の基板Wを水平に保持することができる。メイン搬送ロボットTR1に備えられるハンド16の数は、2つに限らず、1つ、または3つ以上であってもよい。ハンド16が3つ以上備えられる場合は、複数のハンド16が上下方向D1に間隔を空けて1つのアーム15に取り付けられていてもよいし、ハンド16ごとに専用のアーム15が設けられていてもよい。
【0035】
また、図示はしないが、メイン搬送ロボットTR1は、メイン搬送ロボットTR1に内蔵された第2旋回機構および第2昇降駆動機構を備えている。第2旋回機構は、2つのハンド16を対応するアーム15とともに鉛直軸線まわりに回転させる。また、第2昇降駆動機構は、2つのハンド16を対応するアーム15とともに上下方向D1に昇降させる。これにより、メイン搬送ロボットTR1は、各基板処理部12および基板受け渡し部5に各ハンド16を対向させることができる。
【0036】
また、各基板処理部12では、基板Wが1枚ずつ処理される。各基板処理部12では、洗浄、エッチング、剥離処理などの各種の処理が行われる。第1実施形態では、たとえば、基板Wに処理液を供給しながらブラシを擦りつけて当該基板Wを洗浄するスクラブ洗浄が各基板処理部12で行われる。第1処理ユニット13は、たとえば、基板Wの表面をスクラブ洗浄するための表面処理ユニットであり、第2処理ユニット14は、たとえば、基板Wの裏面をスクラブ洗浄するための裏面処理ユニットである。すなわち、第1処理ユニット13を構成する各基板処理部12は、基板Wの表面をスクラブ洗浄する表面処理部12aであり、第2処理ユニット14を構成する各基板処理部12は、基板Wの裏面をスクラブ洗浄する裏面処理部12bである。
【0037】
図2に示すように、表面処理部12aは、基板Wを水平に保持して回転させる第1スピンチャック19と、基板Wの上面(表面)に処理液を供給するノズル20と、基板Wの上面に押し付けられるブラシ21とを備えている。また、裏面処理部12bは、基板Wを水平に保持して回転させる第2スピンチャック22と、基板Wの上面(裏面)に処理液を供給するノズル20と、基板Wの上面に押し付けられるブラシ21とを備えている。第1スピンチャック19は、たとえば、基板Wの下面(裏面)を吸着することによって基板Wを水平に保持し、基板Wの中心を通る鉛直軸線まわりに基板Wを回転させるバキューム式のスピンチャックである。また、第2スピンチャック22は、たとえば、基板Wを周囲から挟持することによって基板Wを保持し、基板Wの中心を通る鉛直軸線まわりに基板Wを回転させる挟持式のスピンチャックである。
【0038】
また、図1に示すように、基板受け渡し部5は、平面視において、キャリア保持部6とメイン搬送ロボットTR1との間に配置されている。図2および図3に示すように、基板受け渡し部5は、第1反転ユニット23と、上下に積層された複数の送り側載置部24と、上下に積層された複数の戻り側載置部25と、第2反転ユニット26とを備えている。第1反転ユニット23、複数の送り側載置部24、複数の戻り側載置部25、および第2反転ユニット26は、上からこの順番で上下に積層されている。第1反転ユニット23は、メイン搬送ロボットTR1側からアクセスでき、インデクサロボットIR1側からアクセスできないように構成されている。また、各送り側載置部24、各戻り側載置部25、および第2反転ユニット26は、インデクサロボットIR1側およびメイン搬送ロボットTR1側のいずれの方向からでもアクセスできるように構成されている。第1反転ユニット23および第2反転ユニット26は、水平に保持した基板Wを水平軸線まわりに180度回転させることにより、基板Wの表裏を反転させる。また、各送り側載置部24および各戻り側載置部25は、インデクサロボットIR1およびメイン搬送ロボットTR1によって基板Wを載置させて保持する。
【0039】
たとえば、複数枚の基板Wの裏面だけを一枚ずつ処理する場合には、制御部4が、インデクサロボットIR1およびメイン搬送ロボットTR1等を制御して、たとえば以下の一連の動作を繰り返し実行させる。すなわち、各キャリアCには、デバイス形成面である基板Wの表面を上に向けて複数枚の基板Wが保持されている。キャリアCに収容された未処理の基板Wは、インデクサロボットIR1によってキャリアCから搬出され、表面が上に向けられた状態で第2反転ユニット26に搬入される。第2反転ユニット26に搬入された未処理の基板Wは、第2反転ユニット26によって表裏が反転された後、メイン搬送ロボットTR1によって搬出される。そして、第2反転ユニット26から搬出された未処理の基板Wは、メイン搬送ロボットTR1によって、裏面が上に向けられた状態でいずれかの基板処理部12(裏面処理部12b)に搬入される。これにより、基板Wの裏面が処理される。
【0040】
また、基板処理部12(裏面処理部12b)で処理された処理済みの基板Wは、メイン搬送ロボットTR1によって基板処理部12から搬出され、第1反転ユニット23に搬入される。第1反転ユニット23に搬入された処理済みの基板Wは、第1反転ユニット23によって表裏が反転された後、メイン搬送ロボットTR1によって搬出される。そして、第1反転ユニット23から搬出された処理済みの基板Wは、メイン搬送ロボットTR1によって、表面が上に向けられた状態でいずれかの戻り側載置部25に搬入される。戻り側載置部25に搬入された処理済みの基板Wは、インデクサロボットIR1によって戻り側載置部25から搬出され、表面が上に向けられた状態でいずれかのキャリアCに搬入される。このような一連の動作が繰り返し行われ、複数枚の基板Wの裏面だけが処理される。
【0041】
図4は、この発明の第1実施形態に係る第2反転ユニット26を図3における矢印IVが示す方向から見た図である。
第2反転ユニット26は、基板Wを保持する複数の基板保持部27と、複数の基板保持部27を回転させる回転機構28とを備えている。複数の基板保持部27は、予め定める配列方向に配列されている。回転機構28は、複数の基板保持部27を配列方向に交差する軸線まわりに180度回転させる。回転機構28が複数の基板保持部27を回転させると、複数の基板保持部27は、回転前との逆の順番で配列方向に配列される。
【0042】
第1実施形態では、たとえば、3個の基板保持部27(第1基板保持部27a、第2基板保持部27b、および第3基板保持部27c)が第2反転ユニット26に備えられている。第1基板保持部27a、第2基板保持部27b、および第3基板保持部27cは、たとえば、上からこの順番で上下方向D1に配列されている。すなわち、第1実施形態では、上下方向D1が、配列方向である。回転機構28は、たとえば、3個の基板保持部27の中間に位置する基板保持部27(第2基板保持部27b)を通る水平な回転軸線L1まわりに3個の基板保持部27を180度回転させる。回転軸線L1は、たとえば、キャリア配列方向Uに平行な軸線である。したがって、回転機構28は、キャリア配列方向Uに直交する平面に沿って3個の基板保持部27を180度回転させる。
【0043】
各基板保持部27は、たとえば、上下に対向する可動板29および固定板30と、可動板29を上下方向D1に平行移動させるアクチュエータ31とを含む。各可動板29は、たとえば、矩形状の板であり、各固定板30は、たとえば、可動板29と大きさが概ね等しい矩形状の板である。3つの基板保持部27の可動板29および固定板30は、平面視において重なり合うように水平な姿勢で上下方向D1に配列されている。さらに、3つの基板保持部27の可動板29および固定板30は、可動板29および固定板30が交互に並ぶように上下方向D1に配列されている。
【0044】
第2反転ユニット26は、鉛直面に沿って配置された支持板32と、上下方向D1に延びる複数(たとえば3つ)のガイド34とを備えている。各固定板30および可動板29は、支持板32に対して回転機構28とは反対側に配置されている。3つの固定板30は、上下に等間隔を空けて支持板32に水平に固定されている。また、各可動板29は、ガイド34を介して支持板32に水平に取り付けられている。各可動板29は、ガイド34に沿って上下方向D1に平行移動可能である。回転機構28は、各固定板30および可動板29とは反対側において支持板32に取り付けられている。
【0045】
各アクチュエータ31は、開位置(図4に示す位置)と閉位置との間で対応する可動板29を上下方向D1に平行移動させる。開位置は、インデクサロボットIR1の各ハンド9およびメイン搬送ロボットRT1の各ハンド16が一対の可動板29および固定板30の間に進入できる位置である。また、閉位置は、可動板29が開位置に位置しているときよりも一対の可動板29および固定板30の間隔が狭い位置である。アクチュエータ31は、たとえば、エアシリンダを含む。また、回転機構28は、支持板32を回転軸線L1まわりに180度回転させる。これにより、3つの基板保持部27が一括して回転される。回転機構28は、たとえば、モータを含む。
【0046】
また、各可動板29の固定板30に対向する面(図4では、各可動板29の下面)には、当該面から突出する複数本の第1支持ピン35が設けられている。また、各固定板30の可動板29に対向する面(図4では、各固定板30の上面)には、当該面から突出する複数本の第2支持ピン36が設けられている。複数本の第1支持ピン35は、基板Wの外周形状に対応する円周上で適当な間隔を空けて配置されている。同様に、複数本の第2支持ピン36は、基板Wの外周形状に対応する円周上で適当な間隔を空けて配置されている。
【0047】
固定板30が対の可動板29の下側に位置するように各対の可動板29および固定板30が配置されている状態(図4に示す状態)では、各固定板30は、複数本の第2支持ピン36の先端を基板Wの下面周縁部に点接触させて、基板Wを支持することができる。また、可動板29が対の固定板30の下側に位置するように各対の可動板29および固定板30が配置されている状態では、各可動板29は、複数本の第1支持ピン35の先端を基板Wの下面周縁部に点接触させて、基板Wを支持することができる。各基板保持部27は、基板検知センサ37を備えており、各基板保持部27での基板Wの有無は、基板検知センサ37によって検知される。各基板検知センサ37の検出値は、制御部4に入力される。
【0048】
各可動板29が開位置(図4に示す位置)に位置している状態では、各搬送ロボット(インデクサロボットIR1およびメイン搬送ロボットTR1のそれぞれ)は、上下に隣接する2個の基板保持部27に基板Wを1枚ずつ同時に搬入したり、上下に隣接する2個の基板保持部27から2枚の基板Wを同時に搬出したりすることができる。また、各可動板29が開位置に位置している状態では、各搬送ロボットは、3個の基板保持部27のいずれか1個の基板保持部27に1枚の基板Wを搬入したり、1個の基板保持部27から1枚の基板Wを搬出したりすることができる。
【0049】
各搬送ロボットが搬送する基板Wは、可動板29が開位置に位置している状態で一対の可動板29および固定板30の間に搬入され、可動板29または固定板30に支持される。制御部4は、アクチュエータ31を制御することにより、可動板29または固定板30によって基板Wが支持されている状態で可動板29を閉位置に移動させて、一対の可動板29および固定板30の間隔を減少させる。これにより、各第1支持ピン35および第2支持ピン36の先端が基板Wに点接触し、一対の可動板29および固定板30によって基板Wが挟持される。
【0050】
また、制御部4は、回転機構28を制御することにより、基板Wが挟持された状態で支持板32を回転軸線L1まわりに180度回転させて基板Wの表裏を反転させる。そして、制御部4は、アクチュエータ31を制御することにより、可動板29を開位置に移動させて、一対の可動板29および固定板30の間隔を増加させる。これにより、一対の可動板29および固定板30による基板Wの挟持が解除される。その後、可動板29または固定板30に支持された基板WがインデクサロボットIR1またはメイン搬送ロボットTR1によって第2反転ユニット26から搬出される。
【0051】
図5は、この発明の第1実施形態に係る第2反転ユニット26によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR1、メイン搬送ロボットTR1、および第2反転ユニット26の動作の一例を説明するための概略図である。
制御部4は、インデクサロボットIR1によって、n(nは、2以上の整数)枚の基板WをキャリアCから第2反転ユニット26に同時に搬送させ、このn枚の基板Wを第2反転ユニット26に搬入させる。そして、制御部4は、第2反転ユニット26によって各基板Wの表裏を反転させた後、第2反転ユニット26に保持されたn枚の基板Wをm(mは、nよりも小さい正の整数で、かつnの約数)枚ずつメイン搬送ロボットTR1によって第2反転ユニット26から搬出させる。
【0052】
第1実施形態では、制御部4は、たとえば、インデクサロボットIR1によって、2枚の基板WをキャリアCから第2反転ユニット26に同時に搬送させ、この2枚の基板Wを第2反転ユニット26に搬入させる。そして、制御部4は、第2反転ユニット26によって各基板Wの表裏を反転させた後、第2反転ユニット26に保持された2枚の基板Wを1枚ずつメイン搬送ロボットTR1によって第2反転ユニット26から搬出させる。すなわち、第1実施形態では、nが2であり、mが1である。また、第2反転ユニット26に備えられた基板保持部27の個数は、n+mであり、第1実施形態では、3である。
【0053】
以下では、第2反転ユニット26によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR1、メイン搬送ロボットTR1、および第2反転ユニット26の動作の一例を具体的に説明する。
制御部4は、インデクサロボットIR1によって、2枚の基板WをキャリアCから搬出させ、図5(a)に示すように、この2枚の基板WをキャリアCから第2反転ユニット26に同時に搬送させる。そして、図5(a)に示すように、制御部4は、インデクサロボットIR1によって、この2枚の基板Wを、上下方向D1の一方端から2番目までの2個の基板保持部27(図5(a)では、第1基板保持部27aおよび第2基板保持部27b)に同時に搬入させる(第1搬入工程)。
【0054】
その後、図5(b)に示すように、制御部4は、回転機構28によって、3個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる(反転工程)。これにより、図5(c)に示すように、3個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27cの順番で上下方向D1に配列されていた3個の基板保持部27が、上から第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0055】
制御部4は、3個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、2個の基板保持部27にそれぞれ搬入された2枚の基板Wを搬出させ、この2枚の基板Wを基板処理部12に搬入させる(搬出工程)。具体的には、図5(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第2基板保持部27bに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、図5(d)に示すように、制御部4は、メイン搬送ロボットTR1によって、第1基板保持部27aに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0056】
図5(d)に示すように、第2基板保持部27bに保持された基板W(1枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から2番目までの2個の基板保持部27(図5(d)では、第3基板保持部27cおよび第2基板保持部27b)が空になっている。図5(d)に示すように、制御部4は、メイン搬送ロボットTR1によって1枚目の基板Wを搬出させた後、インデクサロボットIR1によって、上下方向D1の一方端から2番目までの2個の基板保持部27(図5(d)では、第3基板保持部27cおよび第2基板保持部27b)に2枚の基板Wを同時に搬入させる(第2搬入工程)。
【0057】
また、制御部4は、再びインデクサロボットIR1によって2枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(2枚目の基板W)を搬出させた後に、回転機構28によって、3個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2基板保持部27bから基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0058】
メイン搬送ロボットTR1が1枚目の基板Wを搬出した後に行われるインデクサロボットIR1による2枚の基板Wの搬入は、メイン搬送ロボットTR1が2枚目の基板Wを搬出する前に行われてもよいし、搬出した後に行われてもよい。また、インデクサロボットIR1による2枚の基板Wの搬入と、メイン搬送ロボットTR1による2枚目の基板Wの搬出とが並行して行われてもよい。
【0059】
以上のように第1実施形態では、第2反転ユニット26によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときに、制御部4が、インデクサロボットIR1によって、上下方向D1に配列された3個の基板保持部27のうち上側の2個の基板保持部27に基板Wを1枚ずつ搬入させる(第1搬入工程)。そして、制御部4は、3個の基板保持部27を回転軸線L1まわりに180度回転させる(反転工程)。これにより、基板Wが搬入された上側の2個の基板保持部27が下側に移動する。制御部4は、メイン搬送ロボットTR1によって、下側に移動した2個の基板保持部27のうち上側の基板保持部27から基板W(1枚目の基板W)を搬出させる(搬出工程の一部)。これにより、上側の2個の基板保持部27が空になる。制御部4は、メイン搬送ロボットTR1によって1枚目の基板Wを搬出させた後、再びインデクサロボットIR1によって上側の2個の基板保持部27に基板Wを一枚ずつ搬入させる(第2搬入工程)。
【0060】
このように、制御部4は、インデクサロボットIR1によって搬入された全ての基板W(2枚の基板W)が搬出される前に、上側の2個の基板保持部27を空にさせる。したがって、制御部4は、インデクサロボットIR1によって搬入された全ての基板Wが搬出される前に、再びインデクサロボットIR1によって2枚の基板Wを上側の2個の基板保持部27に搬入させることができる。そのため、制御部4は、インデクサロボットIR1によって搬入された全ての基板Wが搬出されるまでインデクサロボットIR1を待機させなくてもよい。これにより、インデクサロボットIR1の待機時間を短縮することができる。したがって、基板Wの搬送時間を短縮することができる。よって、基板処理装置1のスループット(単位時間当たりの基板Wの処理枚数)を増加させることができる。
【0061】
また、第1実施形態では、インデクサロボットIR1が一度に搬送する基板Wの枚数が2であるから、基板保持部27が4つ設けられていれば、第2反転ユニット26で基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときに、インデクサロボットIR1の待機時間を短縮することができる。すなわち、上下方向D1に配列された4個の基板保持部27が第2反転ユニット26に設けられている場合は、インデクサロボットIR1によって上側の2個の基板保持部27に基板Wが1枚ずつ搬入された後に、4個の基板保持部27を回転軸線L1まわりに180度回転させれば、基板Wが搬入されていない(空の)下側の2個の基板保持部27が上側に移動する。したがって、制御部4は、メイン搬送ロボットTR1によって基板Wを搬出させる前に、インデクサロボットIR1によって上側の2個の基板保持部27に基板Wを1枚ずつ搬入させることができる。
【0062】
このように、インデクサロボットIR1が一度に搬送する基板Wの枚数の2倍の個数の基板保持部27が設けられていれば、インデクサロボットIR1の待機時間を短縮することができる。しかし、この場合、基板保持部27の個数が多いので、第2反転ユニット26が大型化してしまう。具体的には、第1実施形態では、複数の基板保持部27が上下方向D1に配列されているから、第2反転ユニット26の高さが増加してしまう。一方、第1実施形態では、インデクサロボットIR1が一度に搬送する基板Wの枚数の2倍の個数(4個)よりも少ない3個の基板保持部27を用いて、インデクサロボットIR1の待機時間を短縮させている。したがって、第2反転ユニット26の大型化を抑制または防止することができる。これにより、基板処理装置1の大型化を抑制または防止することができる。
【0063】
また、第2反転ユニット26は、インデクサロボットIR1が第2反転ユニット26に対向する位置(図1に示す位置。以下では、単に「対向位置」という。)とメイン搬送ロボットTR1との間で、複数の基板保持部27をキャリア配列方向Uに直交する平面に沿って回転させる。したがって、第2反転ユニット26の高さが大きい場合には、複数の基板保持部27の回転に伴って第2反転ユニット26がインデクサロボットIR1およびメイン搬送ロボットTR1に衝突しないように、対向位置とメイン搬送ロボットTR1との間の距離を十分に確保する必要がある。しかし、対向位置とメイン搬送ロボットTR1との間の距離が増加すると、基板処理装置1のフットプリント(占有面積)が増加する場合がある。したがって、第2反転ユニット26の高さの増加を抑制または防止することにより、基板処理装置1のフットプリントの増加を抑制または防止することができる。
【0064】
また、第1実施形態では、制御部4は、搬出工程と並行して第2搬入工程を実行させることができる。すなわち、制御部4は、メイン搬送ロボットTR1によって2枚目の基板Wが搬出される前や、メイン搬送ロボットTR1が2枚目の基板Wを搬出している間に、インデクサロボットIR1によって2枚の基板Wを搬入させることができる。したがって、2枚目の基板Wが搬出された後に(搬出工程の後に)、インデクサロボットIR1による2枚の基板Wの搬入(第2搬入工程)が行われる場合に比べて、基板Wの搬送時間を短縮することができる。これにより、スループットをさらに増加させることができる。
【0065】
また、第1実施形態では、制御部4は、第1搬入工程および第2搬入工程のそれぞれの工程おいて、インデクサロボットIR1によって2個の基板保持部27に基板Wを1枚ずつ同時に搬入させる。したがって、2枚の基板Wを2個の基板保持部27に順次搬入する場合に比べて、基板Wの搬入時間を短縮することができる。これにより、基板Wの搬送時間を短縮することができる。
【0066】
また、第1実施形態では、n=2、m=1であり、nは、mに2を掛けた値である。反転工程が行われた後であって、メイン搬送ロボットTR1による基板Wの搬出が行われる前(搬出工程が行われる前)は、一番上に位置する1個(m個)の基板保持部27には基板Wが搬入されておらず、残りの2個(n個)の基板保持部27に基板Wが搬入されている。搬出工程では、2個(n個)の基板保持部27に保持された2枚(n枚)の基板Wが、メイン搬送ロボットTR1によって、一番上に位置する基板Wから順に1枚(m枚)ずつ搬出される。したがって、メイン搬送ロボットTR1による基板Wの搬出が1回行われると、上側の2個(m+m個)の基板保持部27が空になる。そのため、制御部4は、メイン搬送ロボットTR1による1枚(m枚)の基板Wの搬出が1回行われた後に、インデクサロボットIR1による基板Wの搬入(第2搬入工程)を開始することができる。すなわち、制御部4は、メイン搬送ロボットTR1による1枚(m枚)の基板Wの搬出が複数回行われるまでインデクサロボットIR1を待機させなくてもよい。これにより、インデクサロボットIR1の待機時間を短縮することができる。
【0067】
また、第1実施形態では、制御部4は、IR移動機構7を制御することにより、複数のキャリアCと基板受け渡し部5との間でインデクサロボットIR1を水平に移動させる。したがって、インデクサロボットIR1が基板Wを水平に搬送する範囲は、メイン搬送ロボットTR1が基板Wを搬送する範囲よりも広い。そのため、インデクサロボットIR1は、メイン搬送ロボットTR1よりも搬送負荷が高い。よって、インデクサロボットIR1の待機時間を短縮させることにより、インデクサロボットIR1が基板処理装置1の処理速度を律することを抑制または防止することができる。さらに、第1実施形態では、第2反転ユニット26の高さの増加が抑制または防止されているので、インデクサロボットIR1が、2つのハンド9を上下方向D1に移動させる範囲の増加が抑制または防止されている。これにより、インデクサロボットIR1が基板Wを搬送する範囲の増加が抑制または防止されており、インデクサロボットIR1による基板Wの搬送時間の増加が抑制または防止されている。
【0068】
図6は、この発明の第2実施形態に係る第2反転ユニット226によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR2、メイン搬送ロボットTR1、および第2反転ユニット226の動作の一例を説明するための概略図である。この図6において、前述の図1〜図5に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0069】
この第2実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR2が一度に搬送する基板Wの枚数と、第2反転ユニット226に備えられた基板保持部27の個数である。
すなわち、第2実施形態では、インデクサロボットIR2が一度に搬送する基板Wの枚数が3である。また、第1実施形態と同様に、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット226から基板Wを1枚ずつ搬出させる。したがって、第2実施形態では、nが3であり、mが1である。そのため、第2反転ユニット226に備えられた基板保持部27の個数(n+m)は、4である。したがって、4個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、および第4基板保持部27d)が第2反転ユニット226に備えられている。
【0070】
以下では、第2反転ユニット226によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR2、メイン搬送ロボットTR1、および第2反転ユニット226の動作の一例を具体的に説明する。
図6(a)に示すように、制御部4は、インデクサロボットIR2によって、3枚の基板WをキャリアCから第2反転ユニット226に同時に搬送させる。そして、図6(a)に示すように、制御部4は、インデクサロボットIR2によって、この3枚の基板Wを、上下方向D1の一方端から3番目までの3個の基板保持部27(図6(a)では、第1基板保持部27a、第2基板保持部27b、および第3基板保持部27c)に同時に搬入させる(第1搬入工程)。
【0071】
その後、図6(b)に示すように、制御部4は、回転機構28によって、4個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図6(c)に示すように、4個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27dの順番で上下方向D1に配列されていた4個の基板保持部27が、上から第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0072】
制御部4は、4個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、3個の基板保持部27にそれぞれ搬入された3枚の基板Wを搬出させ、この3枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図6(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第3基板保持部27cに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第2基板保持部27bに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0073】
図6(d)に示すように、第2基板保持部27bに保持された基板W(2枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から3番目までの3個の基板保持部27(図6(d)では、第4基板保持部27d、第3基板保持部27c、および第2基板保持部27b)が空になっている。図6(d)に示すように、制御部4は、メイン搬送ロボットTR1によって2枚目の基板Wを搬出させた後、インデクサロボットIR2によって、上下方向D1の一方端から3番目までの3個の基板保持部27に3枚の基板Wを同時に搬入させる(第2搬入工程)。
【0074】
また、制御部4は、再びインデクサロボットIR2によって3枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(3枚目の基板W)を搬出させた後に、回転機構28によって、4個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット226から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0075】
メイン搬送ロボットTR1が2枚目の基板Wを搬出した後に行われるインデクサロボットIR2による3枚の基板Wの搬入は、メイン搬送ロボットTR1が3枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR2による3枚の基板Wの搬入と、メイン搬送ロボットTR1による3枚目の基板Wの搬出とが並行して行われてもよい。
【0076】
図7は、この発明の第3実施形態に係る第2反転ユニット326によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR3、メイン搬送ロボットTR1、および第2反転ユニット326の動作の一例を説明するための概略図である。この図7において、前述の図1〜図6に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0077】
この第3実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR3が一度に搬送する基板Wの枚数と、第2反転ユニット326に備えられた基板保持部27の個数である。
すなわち、第3実施形態では、インデクサロボットIR3が一度に搬送する基板Wの枚数が4である。また、第1実施形態と同様に、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット326から基板Wを1枚ずつ搬出させる。したがって、第3実施形態では、nが4であり、mが1である。そのため、第2反転ユニット326に備えられた基板保持部27の個数(n+m)は、5である。したがって、5個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、および第5基板保持部27e)が第2反転ユニット326に備えられている。
【0078】
以下では、第2反転ユニット326によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR3、メイン搬送ロボットTR1、および第2反転ユニット326の動作の一例を具体的に説明する。
図7(a)に示すように、制御部4は、インデクサロボットIR3によって、4枚の基板WをキャリアCから第2反転ユニット326に同時に搬送させる。そして、図7(a)に示すように、制御部4は、インデクサロボットIR3によって、この4枚の基板Wを、上下方向D1の一方端から4番目までの4個の基板保持部27(図7(a)では、第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、および第4基板保持部27d)に同時に搬入させる(第1搬入工程)。
【0079】
その後、図7(b)に示すように、制御部4は、回転機構28によって、5個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図7(c)に示すように、5個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27eの順番で上下方向D1に配列されていた4個の基板保持部27が、上から第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0080】
制御部4は、5個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、4個の基板保持部27にそれぞれ搬入された4枚の基板Wを搬出させ、この4枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図7(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第4基板保持部27dに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第3基板保持部27cに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0081】
図7(d)に示すように、第2基板保持部27bに保持された基板W(3枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から4番目までの4個の基板保持部27(図7(d)では、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、および第2基板保持部27b)が空になっている。図7(d)に示すように、制御部4は、メイン搬送ロボットTR1によって3枚目の基板Wを搬出させた後、インデクサロボットIR3によって、上下方向D1の一方端から4番目までの4個の基板保持部27に4枚の基板Wを同時に搬入させる(第2搬入工程)。
【0082】
また、制御部4は、再びインデクサロボットIR3によって4枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(4枚目の基板W)を搬出させた後に、回転機構28によって、5個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット326から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0083】
メイン搬送ロボットTR1が3枚目の基板Wを搬出した後に行われるインデクサロボットIR3による4枚の基板Wの搬入は、メイン搬送ロボットTR1が4枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR3による4枚の基板Wの搬入と、メイン搬送ロボットTR1による4枚目の基板Wの搬出とが並行して行われてもよい。
【0084】
図8は、この発明の第4実施形態に係る第2反転ユニット426によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR4、メイン搬送ロボットTR1、および第2反転ユニット426の動作の一例を説明するための概略図である。この図8において、前述の図1〜図7に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0085】
この第4実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR4が一度に搬送する基板Wの枚数と、第2反転ユニット426に備えられた基板保持部27の個数である。
すなわち、第4実施形態では、インデクサロボットIR4が一度に搬送する基板Wの枚数が5である。また、第1実施形態と同様に、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット426から基板Wを1枚ずつ搬出させる。したがって、第4実施形態では、nが5であり、mが1である。そのため、第2反転ユニット426に備えられた基板保持部27の個数(n+m)は、6である。したがって、6個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、および第6基板保持部27f)が第2反転ユニット426に備えられている。
【0086】
以下では、第2反転ユニット426によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR4、メイン搬送ロボットTR1、および第2反転ユニット426の動作の一例を具体的に説明する。
図8(a)に示すように、制御部4は、インデクサロボットIR4によって、5枚の基板WをキャリアCから第2反転ユニット426に同時に搬送させる。そして、図8(a)に示すように、制御部4は、インデクサロボットIR4によって、この5枚の基板Wを、上下方向D1の一方端から5番目までの5個の基板保持部27(図8(a)では、第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、および第5基板保持部27e)に同時に搬入させる(第1搬入工程)。
【0087】
その後、図8(b)に示すように、制御部4は、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図8(c)に示すように、6個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、第6基板保持部27fの順番で上下方向D1に配列されていた6個の基板保持部27が、上から第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0088】
制御部4は、6個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、5個の基板保持部27にそれぞれ搬入された5枚の基板Wを搬出させ、この5枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図8(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第5基板保持部27eに保持された基板W(1枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第4基板保持部27dに保持された基板W(2枚目の基板W)を搬出させ、この基板Wをいずれかの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に1枚ずつ基板Wを搬出させる。
【0089】
図8(d)に示すように、第2基板保持部27bに保持された基板W(4枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から5番目までの5個の基板保持部27(図8(d)では、第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、および第2基板保持部27b)が空になっている。図8(d)に示すように、制御部4は、メイン搬送ロボットTR1によって4枚目の基板Wを搬出させた後、インデクサロボットIR4によって、上下方向D1の一方端から5番目までの5個の基板保持部27に5枚の基板Wを同時に搬入させる(第2搬入工程)。
【0090】
また、制御部4は、再びインデクサロボットIR4によって5枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第1基板保持部27aに保持された基板W(5枚目の基板W)を搬出させた後に、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット426から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0091】
メイン搬送ロボットTR1が4枚目の基板Wを搬出した後に行われるインデクサロボットIR4による5枚の基板Wの搬入は、メイン搬送ロボットTR1が5枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR4による5枚の基板Wの搬入と、メイン搬送ロボットTR1による5枚目の基板Wの搬出とが並行して行われてもよい。
【0092】
図9は、この発明の第5実施形態に係る第2反転ユニット526によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR5、メイン搬送ロボットTR1、および第2反転ユニット526の動作の一例を説明するための概略図である。この図9において、前述の図1〜図8に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0093】
この第5実施形態と前述の第1実施形態との主要な相違点は、インデクサロボットIR5が一度に搬送する基板Wの枚数と、第2反転ユニット526に備えられた基板保持部27の個数である。
すなわち、第5実施形態では、インデクサロボットIR5が一度に搬送する基板Wの枚数が4である。また、第1実施形態とは異なり、制御部4は、メイン搬送ロボットTR1によって第2反転ユニット526から基板Wを2枚ずつ搬出させる。したがって、第5実施形態では、nが4であり、mが2である。そのため、第2反転ユニット526に備えられた基板保持部27の個数(n+m)は、6である。したがって、6個の基板保持部27(第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、および第6基板保持部27f)が第2反転ユニット526に備えられている。
【0094】
以下では、第2反転ユニット526によって基板Wの表裏を反転させながら、キャリア保持部6から基板処理部12に複数枚の基板Wを搬送させるときのインデクサロボットIR5、メイン搬送ロボットTR1、および第2反転ユニット526の動作の一例を具体的に説明する。
図9(a)に示すように、制御部4は、インデクサロボットIR5によって、4枚の基板WをキャリアCから第2反転ユニット526に同時に搬送させる。そして、図9(a)に示すように、制御部4は、インデクサロボットIR5によって、この4枚の基板Wを、上下方向D1の一方端から4番目までの4個の基板保持部27(図9(a)では、第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、および第4基板保持部27d)に同時に搬入させる(第1搬入工程)。
【0095】
その後、図9(b)に示すように、制御部4は、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。これにより、図9(c)に示すように、6個の基板保持部27は、回転前とは逆の順番で上下方向D1に配列される。すなわち、上から第1基板保持部27a、第2基板保持部27b、第3基板保持部27c、第4基板保持部27d、第5基板保持部27e、第6基板保持部27fの順番で上下方向D1に配列されていた6個の基板保持部27が、上から第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、第3基板保持部27c、第2基板保持部27b、第1基板保持部27aの順番で上下方向D1に配列される。
【0096】
制御部4は、6個の基板保持部27を180度回転させた後、メイン搬送ロボットTR1によって、4個の基板保持部27にそれぞれ搬入された4枚の基板Wを搬出させ、この4枚の基板Wを基板処理部12に搬入する(搬出工程)。具体的には、図9(c)に示すように、制御部4は、メイン搬送ロボットTR1によって、第4基板保持部27dに保持された基板W(1枚目の基板W)と、第3基板保持部27cに保持された基板W(2枚目の基板W)とを同時に搬出させ、この2枚の基板Wを2つの基板処理部12に搬入させる。その後、制御部4は、メイン搬送ロボットTR1によって、第2基板保持部27bに保持された基板W(3枚目の基板W)と、第1基板保持部27aに保持された基板W(4枚目の基板W)とを同時に搬出させ、この2枚の基板Wを2つの基板処理部12に搬入させる。このようにして、制御部4は、上下方向D1の一方端に位置する基板Wから順に2枚ずつ基板Wを搬出させる。
【0097】
図9(d)に示すように、第4基板保持部27dおよび第3基板保持部27cにそれぞれ保持された2枚の基板W(1枚目の基板Wと2枚目の基板W)がメイン搬送ロボットTR1によって搬出された後は、上から4番目までの4個の基板保持部27(図9(d)では、第6基板保持部27f、第5基板保持部27e、第4基板保持部27d、および第3基板保持部27c)が空になっている。図9(d)に示すように、制御部4は、メイン搬送ロボットTR1によって1枚目および2枚目の基板Wを搬出させた後、インデクサロボットIR5によって、上下方向D1の一方端から4番目までの4個の基板保持部27に4枚の基板Wを同時に搬入させる(第2搬入工程)。
【0098】
また、制御部4は、再びインデクサロボットIR5によって4枚の基板Wを同時に搬入させ、メイン搬送ロボットTR1によって第2基板保持部27bおよび第1基板保持部27aにそれぞれ保持された2枚の基板W(3枚目の基板Wと4枚目の基板W)を搬出させた後に、回転機構28によって、6個の基板保持部27を回転軸線L1まわりに180度回転させて、基板Wの表裏を反転させる。そして、制御部4は、再びメイン搬送ロボットTR1によって第2反転ユニット526から基板Wを搬出させる。制御部4は、このような一連の動作を繰り返し実施させて、複数枚の基板WをキャリアCから基板処理部12に搬送させる。
【0099】
メイン搬送ロボットTR1が1枚目および2枚目の基板Wを搬出した後に行われるインデクサロボットIR5による4枚の基板Wの搬入は、メイン搬送ロボットTR1が3枚目および4枚目の基板Wを搬出する前であってもよいし、搬出した後であってもよい。また、インデクサロボットIR5による4枚の基板Wの搬入と、メイン搬送ロボットTR1による3枚目および4枚目の基板Wの搬出とが並行して行われてもよい。
【0100】
以上のように第1〜第5実施形態のいずれの実施形態においても、制御部4は、インデクサロボットIR1〜IR5によって搬入された全ての基板W(n枚の基板W)が搬出される前に、上側のn個の基板保持部27を空にさせる。したがって、制御部4は、インデクサロボットIR1〜IR5によって搬入された全ての基板Wが搬出される前に、再びインデクサロボットIR1〜IR5によってn枚の基板Wを上側のn個の基板保持部27に搬入させることができる。そのため、制御部4は、インデクサロボットIR1〜IR5によって搬入された全ての基板Wが搬出されるまでインデクサロボットIR1〜IR5を待機させなくてもよい。これにより、インデクサロボットIR1〜IR5の待機時間を短縮することができる。また、基板保持部27の個数は、n+m(mは、nよりも小さい正の整数)であり、インデクサロボットIR1が一度に搬送する基板Wの枚数(n枚)の2倍(2n)より少ない。したがって、インデクサロボットIR1が一度に搬送する基板Wの枚数の2倍の個数の基板保持部27が設けられる場合に比べて、基板処理装置1の大型化を抑制または防止することができる。
【0101】
この発明の実施の形態の説明は以上であるが、この発明は、前述の実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。たとえば、前述の実施形態では、第2反転ユニットを経由してインデクサロボット側からメイン搬送ロボット側に複数の基板を搬送させて、インデクサロボットの待機時間を短縮させる場合について説明した。しかし、第2反転ユニットを経由してインデクサロボット側からメイン搬送ロボット側に複数の基板を搬送させる場合と同様に、第2反転ユニットを経由してメイン搬送ロボット側からインデクサロボット側に複数の基板を搬送させてもよい。
【0102】
具体的には、制御部4は、メイン搬送ロボットによって、n枚の基板Wを基板処理部12から第2反転ユニットに同時に搬送させ、このn枚の基板Wを第2反転ユニットに搬入させてもよい。そして、制御部4は、第2反転ユニットによって各基板Wの表裏を反転させた後、第2反転ユニットに保持されたn枚の基板Wをm枚ずつインデクサロボットによって第2反転ユニットから搬出させてもよい。これにより、メイン搬送ロボットの待機時間を短縮することができる。
【0103】
また、前述の実施形態では、第2反転ユニットの上方に、メイン搬送ロボット側からしかアクセスできない第1反転ユニットが設けられている場合について説明した。しかし、第1反転ユニットが、第2反転ユニットと同様の構成を有しており、インデクサロボット側およびメイン搬送ロボット側の両方からアクセスできるように構成されていてもよい。この場合、インデクサロボット側からメイン搬送ロボット側に複数の基板を搬送する場合に、一方の反転ユニットを用い、メイン搬送ロボット側からインデクサロボット側に複数の基板を搬送する場合に、他方の反転ユニットを用いてもよい。
【0104】
また、前述の実施形態では、複数の基板保持部27が上下方向D1に配列されている場合について説明した。しかし、複数の基板保持部27は、上下方向D1以外の予め定められた方向に配列されていてもよい。さらに、前述の実施形態では、各基板保持部27は、基板Wを挟持して保持する構成を有している場合について説明した。しかし、各基板保持部27は、挟持に限らず、吸着などの他の方法によって基板Wを保持するように構成されていてもよい。さらにまた、前述の実施形態では、各基板保持部27が同様の構成を有している場合について説明した。しかし、構成の異なる複数種の基板保持部が第2反転ユニットに備えられていてもよい。
【0105】
また、前述の実施形態では、制御部4が、第1搬入工程および第2搬入工程の2つの工程において、インデクサロボットによってn枚の基板Wをn個の基板保持部27に同時に搬入させる場合について説明した。しかし、制御部4は、第1搬入工程および第2搬入工程の少なくとも一方の工程において、インデクサロボットによってn枚の基板Wを複数回に分けてn個の基板保持部27に搬入させてもよい。
【0106】
また、前述の実施形態では、第1搬入工程および第2搬入工程において、インデクサロボットIR1によって、上下方向D1に配列された複数の基板保持部27のうち上側の基板保持部27に基板Wを1枚ずつ搬入させるが、上下方向D1に配列された複数の基板保持部27のうち下側の基板保持部27に基板Wを搬入してもよい。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0107】
1 基板処理装置
4 制御部(制御手段)
6 キャリア保持部(第1保持部、収容部材保持部)
7 IR移動機構(移動機構)
12 基板処理部(第2保持部)
27 基板保持部
28 回転機構
C キャリア(収容部材)
D1 上下方向(配列方向)
IR1 インデクサロボット(第1搬送ロボット)
IR2 インデクサロボット(第1搬送ロボット)
IR3 インデクサロボット(第1搬送ロボット)
IR4 インデクサロボット(第1搬送ロボット)
IR5 インデクサロボット(第1搬送ロボット)
TR1 メイン搬送ロボット(第2搬送ロボット)
【特許請求の範囲】
【請求項1】
基板をそれぞれ保持する第1保持部および第2保持部と、
予め定める配列方向に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部と、
基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構と、
前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボットと、
前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボットと、
前記第1搬送ロボットを制御することにより、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、前記回転機構を制御することにより、前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、前記第2搬送ロボットを制御することにより、前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、前記第1搬送ロボットを制御することにより、前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを実行する制御手段と含む、基板処理装置。
【請求項2】
前記制御手段は、前記搬出工程と並行して、前記第2搬入工程を実行するように構成されている、請求項1記載の基板処理装置。
【請求項3】
前記制御手段は、前記第1搬入工程および第2搬入工程の少なくとも一方の工程おいて、前記第1搬送ロボットによってn枚の基板をそれぞれn個の前記基板保持部に同時に搬入させるように構成されている、請求項1または2記載の基板処理装置。
【請求項4】
nは、mに2を掛けた値である、請求項1〜3のいずれか一項に記載の基板処理装置。
【請求項5】
前記第1保持部は、複数枚の基板を収容する複数の収容部材を保持する収容部材保持部を含み、
前記第2保持部は、基板を保持して、保持した基板を処理する基板処理部を含み、
前記基板処理装置は、前記第1搬送ロボットを移動させる移動機構をさらに含み、
前記制御手段は、前記移動機構を制御することにより、前記複数の収容部材と前記基板保持部との間で前記第1搬送ロボットを移動させるように構成されている、請求項1〜4のいずれか一項に記載の基板処理装置。
【請求項6】
基板をそれぞれ保持する第1保持部および第2保持部と、予め定める配列方向に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部と、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構と、前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボットと、前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボットとを備える基板処理装置において、
前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、
前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、
前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、
前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを備える基板搬送方法。
【請求項1】
基板をそれぞれ保持する第1保持部および第2保持部と、
予め定める配列方向に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部と、
基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構と、
前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボットと、
前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボットと、
前記第1搬送ロボットを制御することにより、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、前記回転機構を制御することにより、前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、前記第2搬送ロボットを制御することにより、前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、前記第1搬送ロボットを制御することにより、前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを実行する制御手段と含む、基板処理装置。
【請求項2】
前記制御手段は、前記搬出工程と並行して、前記第2搬入工程を実行するように構成されている、請求項1記載の基板処理装置。
【請求項3】
前記制御手段は、前記第1搬入工程および第2搬入工程の少なくとも一方の工程おいて、前記第1搬送ロボットによってn枚の基板をそれぞれn個の前記基板保持部に同時に搬入させるように構成されている、請求項1または2記載の基板処理装置。
【請求項4】
nは、mに2を掛けた値である、請求項1〜3のいずれか一項に記載の基板処理装置。
【請求項5】
前記第1保持部は、複数枚の基板を収容する複数の収容部材を保持する収容部材保持部を含み、
前記第2保持部は、基板を保持して、保持した基板を処理する基板処理部を含み、
前記基板処理装置は、前記第1搬送ロボットを移動させる移動機構をさらに含み、
前記制御手段は、前記移動機構を制御することにより、前記複数の収容部材と前記基板保持部との間で前記第1搬送ロボットを移動させるように構成されている、請求項1〜4のいずれか一項に記載の基板処理装置。
【請求項6】
基板をそれぞれ保持する第1保持部および第2保持部と、予め定める配列方向に配列した状態で基板をそれぞれ保持することができ、かつ基板の表裏が反転するように一括して回転可能なn+m個(nは、2以上の整数。mは、nよりも小さい正の整数で、かつnの約数)の基板保持部と、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる回転機構と、前記第1保持部から前記基板保持部に基板を搬送する第1搬送ロボットと、前記基板保持部から前記第2保持部に基板を搬送する第2搬送ロボットとを備える基板処理装置において、
前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第1搬入工程と、
前記第1搬入工程の後に、前記回転機構によって、基板の表裏が反転するとともに、回転前とは逆の順番で前記n+m個の基板保持部が前記配列方向に配列するように前記n+m個の基板保持部を回転させる反転工程と、
前記反転工程の後に、前記第2搬送ロボットによって、前記第1搬入工程において前記n個の基板保持部に搬入されたn枚の基板を前記配列方向の一方端に位置する基板から順にm枚ずつ搬出させて、当該n枚の基板を前記第2保持部に搬入させる搬出工程と、
前記反転工程の後に、前記第1搬送ロボットによって、前記第1保持部からn枚の基板を搬出させ、当該n枚の基板を同時に搬送させて前記配列方向の一方端からn番目までのn個の前記基板保持部に搬入させる第2搬入工程とを備える基板搬送方法。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−23195(P2012−23195A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−159708(P2010−159708)
【出願日】平成22年7月14日(2010.7.14)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月14日(2010.7.14)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
[ Back to top ]