
基板処理装置及び基板処理方法並びに基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体
【課題】基板の材質や表面の状態などの影響を受けることなく基板の保持状態の良否を正確に判断できる基板処理装置を提供すること。
【解決手段】本発明では、基板(2)を保持する基板保持手段(22)と、前記基板保持手段(22)で前記基板(2)を正常に保持したときに前記基板(2)の端縁部が存在する領域を撮影する撮影手段(25)と、前記撮影手段(25)で撮影した画像に基づいて前記基板保持手段(22)による前記基板(2)の保持状態を判断する制御手段(26)とを有することにした。
【解決手段】本発明では、基板(2)を保持する基板保持手段(22)と、前記基板保持手段(22)で前記基板(2)を正常に保持したときに前記基板(2)の端縁部が存在する領域を撮影する撮影手段(25)と、前記撮影手段(25)で撮影した画像に基づいて前記基板保持手段(22)による前記基板(2)の保持状態を判断する制御手段(26)とを有することにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板処理装置及び基板処理方法並びに基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体に関するものである。
【背景技術】
【0002】
従来より、半導体部品やフラットパネルディスプレイなどを製造する場合には、各製造工程において半導体ウエハや液晶基板などの基板を基板処理装置を用いて処理している。
【0003】
そして、基板処理装置においては、基板保持手段を用いて基板を保持した状態で搬送したり、基板保持手段を用いて基板を保持した状態で回転させながら洗浄やエッチングやレジスト塗布などの各種の処理を施している。
【0004】
従来の基板処理装置では、基板が基板保持手段によって正常に保持されているか否かを検出するために、基板保持手段で保持された基板の表面に向けて投光器からレーザー光を照射し、基板の表面での反射光の光量を受光器で検出し、その検出値に基づいて基板が正常に保持されているか否かを判断している(たとえば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−229403号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、上記従来の基板処理装置では、受光器で検出した光量の値と予め設定した閾値とを比較して基板が正常に保持されているか否かを判別しているために、基板が基板保持手段によって正常に保持されている場合であっても、基板の材質や表面(反射面)の状態などの影響で基板の表面の反射率が低いときには、受光器による検出値も低くなってしまう。
【0007】
そのため、従来の基板処理装置では、基板が基板保持手段によって正常に保持されている場合であっても、基板の材質や表面の状態などの影響によって受光器で検出される光量が閾値よりも低いときには、誤って基板が正常に保持されていないと判断してしまうおそれがあった。
【課題を解決するための手段】
【0008】
そこで、本発明では、基板処理装置において、基板を保持する基板保持手段と、前記基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影する撮影手段と、前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断する制御手段とを有することにした。
【0009】
また、前記撮影手段で撮影する領域は、前記基板保持手段に設けた前記基板を保持するための基板保持体を含む領域とした。
【0010】
また、前記撮影手段は、1度の撮影で複数の前記基板保持体を含む領域を撮影することにした。
【0011】
また、前記制御手段は、前記撮影手段で撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することにした。
【0012】
また、前記制御手段は、前記撮影手段で撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することにした。
【0013】
また、前記制御手段は、前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することにした。
【0014】
また、前記制御手段は、前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することにした。
【0015】
また、本発明では、基板処理方法において、基板が正常に保持されたときに前記基板の端縁部が存在する領域を撮影し、撮影した画像に基づいて前記基板の保持状態を判断することにした。
【0016】
また、前記基板を保持するための基板保持体を含む領域を撮影することにした。
【0017】
また、1度の撮影で複数の前記基板保持体を撮影することにした。
【0018】
また、撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することにした。
【0019】
また、撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することにした。
【0020】
また、前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することにした。
【0021】
また、前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することにした。
【0022】
また、本発明では、基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体において、撮影手段に、基板を保持する基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影させ、制御手段に、前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断させることにした。
【発明の効果】
【0023】
本発明では、基板の材質や表面の状態などに影響されることなく基板の保持状態を正確に判断することができる。
【図面の簡単な説明】
【0024】
【図1】基板処理装置を示す平面図。
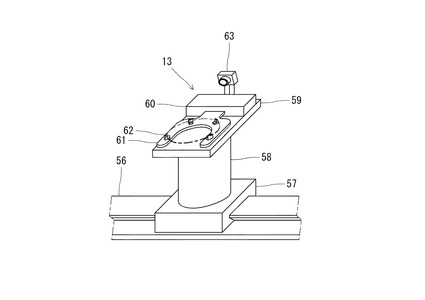
【図2】基板搬送装置を示す斜視図。
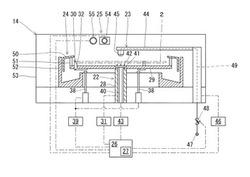
【図3】基板処理室を示す正面断面図。
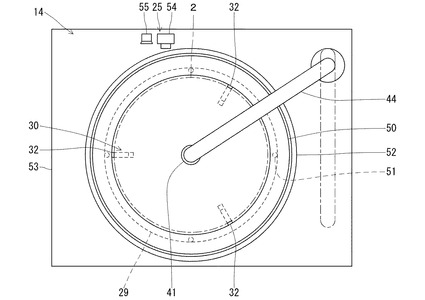
【図4】同平面図。
【図5】基板保持機構を示す動作説明図。
【図6】基板処理プログラムを示すフローチャート。
【図7】撮影された画像を示す説明図。
【発明を実施するための形態】
【0025】
以下に、本発明に係る基板処理装置の具体的な構成について図面を参照しながら説明する。
【0026】
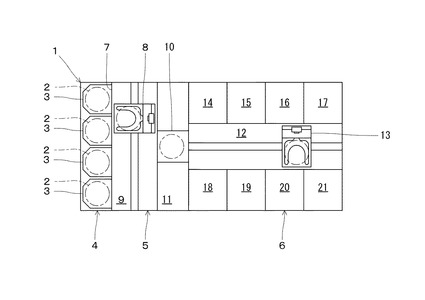
図1に示すように、基板処理装置1は、前端部に基板2(ここでは、半導体ウエハ。)を複数枚(たとえば、25枚。)まとめてキャリア3で搬入及び搬出するための基板搬入出台4を設けるとともに、基板搬入出台4の後部にキャリア3に収容された基板2を搬送するための基板搬送ユニット5を設け、基板搬送ユニット5の後部に基板2の洗浄処理やエッチング処理等を行うための基板処理ユニット6を設けている。
【0027】
基板搬入出台4は、4個のキャリア3を基板搬送ユニット5の前壁7に密着させた状態で左右に間隔をあけて載置する。
【0028】
基板搬送ユニット5は、前側に基板搬送装置8を収容した搬送室9を形成するとともに、後側に基板受渡台10を収容した基板受渡室11を形成している。
【0029】
そして、基板搬送ユニット5では、基板搬送装置8を用いて基板搬入出台4に載置されたいずれか1個のキャリア3と基板受渡台10との間で基板2を搬送する。
【0030】
基板処理ユニット6は、中央部に前後に伸延する基板搬送室12を形成し、基板搬送室12の内部に基板搬送装置13を収容している。
【0031】
また、基板処理ユニット6は、基板搬送室12の一方側に第1〜第4の基板処理室14〜17を並べて配置するとともに、基板搬送室12の他方側に第5〜第8の基板処理室18〜21を並べて配置している。
【0032】
そして、基板処理ユニット6は、基板搬送装置13を用いて基板搬送ユニット5の基板受渡室11と各基板処理室14〜21との間で基板2を1枚ずつ水平に保持した状態で搬送し、各基板処理室14〜21で基板2を1枚ずつ処理する。
【0033】
基板搬送装置13は、図2に示すように、基板搬送室12の床部に敷設したレール56に基台57を移動可能に装着し、基台57の上部に回動機構58を取付け、回動機構58の上部にテーブル59を取付けている。また、基板搬送装置13は、テーブル59の上部に昇降機構60を取付け、昇降機構60にフォーク状の基板保持板61を取付け、基板保持板61の上面に基板2を保持するための基板保持体62を基板2の外周端縁に沿って円周方向に間隔をあけて取付けている。さらに、基板搬送装置13は、テーブル59に撮影手段としてのカメラ63を基板保持板61に向けて取付けている。カメラ63は、基板保持体62で基板2を保持している状態において基板2の端縁部が存在する領域に向けられており、基板2と基板保持体62を撮影する。このカメラ63は、後述する制御手段26に接続しており、制御手段26で駆動制御される。なお、搬送室9に設けた基板搬送装置8も同様の構成としている。
【0034】
各基板処理室14〜21は、同様の構成をしており、ここでは、代表して第1の基板処理室14の構成について説明する。
【0035】
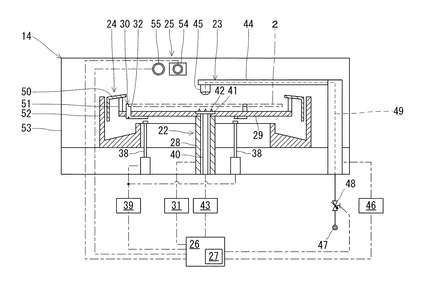
基板処理室14は、図3〜図5に示すように、基板2を水平に保持しながら回転させるための基板保持手段22と、基板2の表面に処理液を供給するための処理液供給手段23と、基板2の表面に供給した処理液を回収する処理液回収手段24と、基板2の保持状態を撮影するための撮影手段25と、これらの基板保持手段22と処理液供給手段23と処理液回収手段24と撮影手段25を制御する制御手段26を有する。制御手段26は、記憶媒体27に記憶した各種プログラムに従って基板処理装置1の各動作を制御する。
【0036】
基板保持手段22は、中空円筒状の回転軸28の上端部に円板状のテーブル29を水平に取付けるとともに、テーブル29に基板2を水平に保持するための基板保持機構30を設けている。回転軸28には、回転駆動機構31を接続している。回転駆動機構31は、回転軸28及びテーブル29を回転させ、テーブル29に基板保持機構30で水平に保持した基板2を回転させる。この回転駆動機構31は、制御手段26に接続しており、制御手段26で回転制御される。
【0037】
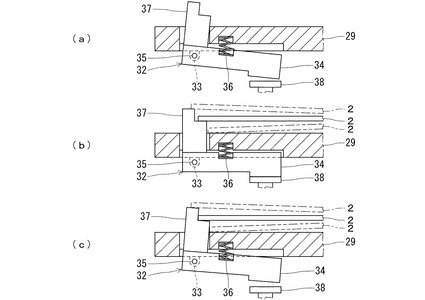
基板保持機構30は、テーブル29の周縁部に基板2の外周端縁を挟持して基板2を水平に保持する複数個(ここでは、3個)の基板保持体32を円周方向に間隔をあけて取付けている。基板保持体32は、テーブル29の下面に形成したブラケット33にアーム部34の基端部を枢軸35を介して上下回動自在に取付け、アーム部34の基端側上部にテーブル29を貫通する保持部37を形成している。テーブル29の下面とアーム部34の上面との間には、アーム部34を下方へ向けて付勢するスプリング36を介設している。また、基板保持機構30は、アーム部34の先端側下部に駆動ロッド38を間隔をあけて配置している。駆動ロッド38には、昇降機構39を接続している。昇降機構39は、駆動ロッド38を昇降させ、それに連動して基板保持体32が開閉して、基板保持体32の閉塞時に保持部37が基板2の外周端縁を挟持して基板2を保持する。この昇降機構39は、制御手段26に接続しており、制御手段26で昇降制御(基板保持体32の開閉制御)される。
【0038】
また、基板保持手段22は、回転軸28の中空部に基板2を昇降させるための昇降ロッド40を昇降自在に設けるとともに、昇降ロッド40の上端部に円板状の昇降台41を取付け、昇降台41の上面に係止ピン42を取付けている。昇降ロッド40には、昇降機構43を接続している。昇降機構43は、昇降ロッド40及び昇降台41を昇降させ、係止ピン42で係止した基板2を昇降させる。この昇降機構43は、制御手段26に接続しており、制御手段26で昇降制御される。
【0039】
処理液供給手段23は、テーブル29よりも上方にアーム44を水平移動可能に配置し、アーム44の先端部にノズル45を取付けている。アーム44には、移動機構46を接続している。移動機構46は、ノズル45を基板2の外方の退避位置と基板2の中央上方の供給開始位置との間で移動させる。この移動機構46は、制御手段26に接続しており、制御手段26で移動制御される。
【0040】
また、処理液供給手段23は、処理液(洗浄液やリンス液やエッチング液など)を供給するための処理液供給源47にノズル45を流量調整器48と供給流路49を介して接続している。流量調整器48は、ノズル45に供給する処理液の流量を調整する。この流量調整器48は、制御手段26に接続しており、制御手段26で開閉制御及び流量制御される。
【0041】
処理液回収手段24は、テーブル29の上部に環状のカバー50を支柱51を介して取付けるとともに、テーブル29の周囲に上方を開口させるとともに図示しない排液管に接続させたカップ52を配置している。そして、処理液回収手段24は、テーブル29に載置した基板2をカバー50及びカップ52で囲んで処理液の飛散を防止するとともに処理液の回収をする。
【0042】
撮影手段25は、基板処理室14のケーシング53にカメラ54とライト55とをテーブル29に向けて取付けている。カメラ54及びライト55は、基板保持手段22で基板2を保持して停止している状態において基板2の端縁部が存在する領域に向けられており、基板2と基板保持体32を撮影する。このカメラ54及びライト55は、制御手段26に接続しており、制御手段26で駆動制御される。なお、ライト55は、カメラ54で撮影する領域の明暗によって無くしてもよく、複数個設けてもよい。また、ライト55は、撮影時に不要な影ができないような位置に設置する。ライト55は、赤外線を照射するものであってもよく、カメラ54は、可視光を遮断するフィルターを備えたものであってもよい。ライト55から赤外線を照射しつつカメラ54で赤外光以外の可視光を遮断することで、装置内外の明るさなどに左右されることなく撮影することができる。
【0043】
基板処理装置1は、以上に説明したように構成しており、制御手段26(コンピュータ)で読み取り可能な記憶媒体27に記憶した基板処理プログラムにしたがって各基板処理室14〜21で基板2を処理する。なお、記憶媒体27は、基板処理プログラム等の各種プログラムを記憶できる媒体であればよく、ROMやRAMなどの半導体メモリ型の記憶媒体であってもハードディスクやCD−ROMなどのディスク型の記憶媒体であってもよい。
【0044】
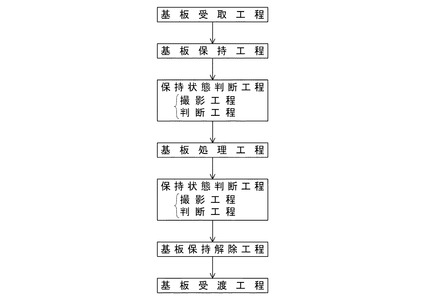
上記基板処理装置1では、図6に示す基板処理プログラムに従って基板2の処理を行う。なお、以下の説明では、代表して基板処理室14での基板2の処理について説明するが、他の基板処理室15〜21でも同様の処理を行う。
【0045】
まず、基板処理プログラムは、基板搬送装置13によって搬入される基板2を基板処理室14の基板保持手段22で受取る基板受取工程を実行する。
【0046】
この基板受取工程において基板処理プログラムは、制御手段26によって基板保持手段22の昇降機構43を制御して昇降ロッド40及び昇降台41をテーブル29よりも上方に上昇させて、係止ピン40が基板搬送装置13から基板2を受取る。
【0047】
基板2が基板処理室14に搬入されたとき、図5(a)に示すように、駆動ロッド38が降下した位置にあり、基板保持体32はスプリング36の付勢力で閉じた状態となっている。基板処理プログラムは、昇降ロッド40及び昇降台41を上昇させる際に、図5(b)に示すように、制御手段26によって基板保持機構30の昇降機構39を制御して駆動ロッド38を所定位置まで上昇させて、基板保持体32をスプリング36の付勢力に抗して開いた状態にする。
【0048】
その後、基板処理プログラムは、制御手段26によって基板保持手段22の昇降機構43を制御して昇降ロッド40及び昇降台41を降下させて、基板2を基板保持機構30の上部に載置する。
【0049】
ここで、基板2の位置が所定の範囲内の場合には、基板2は、図5(b)中で実線で示すように基板保持体32の保持部37の所定位置に正常に載置される。一方、基板2の位置が所定の範囲からずれている場合には、基板2は、図5(b)中で一点鎖線で示すように基板保持体32の保持部37の上部に載置されてしまったり、図5(b)中で二点鎖線で示すように基板保持体32の保持部37の下方へ脱落してしまう。
【0050】
次に、基板処理プログラムは、基板2を基板保持機構30で保持する基板保持工程を実行する。
【0051】
この基板保持工程において基板処理プログラムは、図5(c)に示すように、制御手段26によって基板保持機構30の昇降機構39を制御して駆動ロッド38を降下させて、基板保持体32をスプリング36の付勢力で閉じた状態にする。
【0052】
その際に、先の基板受取工程で基板2が基板保持体32の保持部37の所定位置に載置された場合には、基板2は、図5(c)中で実線で示すように基板2の端縁が基板保持体32の保持部37で良好に挟持されて正常に保持される。一方、基板受取工程で基板2が基板保持体32の保持部37の上部に載置された場合や基板2が下方に脱落した場合には、基板2は、図5(c)中で一点鎖線で示すように基板2の端縁が基板保持体32の保持部37の上部に乗り上げた状態や図5(c)中で二点鎖線で示すように基板2が基板保持体32の保持部37から脱落した状態となり、基板2は、正常に保持されない。
【0053】
次に、基板処理プログラムは、基板2の保持状態を判断する保持状態判断工程を実行する。
【0054】
この保持状態判断工程において基板処理プログラムは、制御手段26によって撮影手段25を制御し、ライト55を点灯させるとともにカメラ54に所定の領域を撮影させ、その後、ライト55を消灯させる(撮影工程)。
【0055】
その際に、基板処理装置1は、基板保持手段22で基板2を正常に保持した場合(図5(c)中で実線で示す状態の場合)に基板2の端縁部が存在する領域を撮影する。
【0056】
その後、基板処理プログラムは、カメラ54で撮影した画像に基づいて基板2の保持状態を判断する(判断工程)。この保持状態の判断は、たとえば、予め正常に基板2が保持されている状態の画像を撮影しておき、その画像を基準画像とし、実際の基板2の保持状態をカメラ54で撮影した画像と基準画像とを比較し、画像同士が一致する割合を算出し、その一致割合が所定値以上の場合には基板2が正常に保持されていると判断し、一方、一致割合が所定値未満の場合には基板2が正常に保持されていないと判断する。
【0057】
その後、基板処理プログラムは、基板2が正常に保持されていると判断した場合には、基板処理工程を実行し、基板2が正常に保持されていないと判断した場合には、基板2の処理を一時停止し、オペレーターに異常を報知する。なお、オペレーターによって異常が解消された場合には、再度上記保持状態判断工程を実行する。
【0058】
基板処理工程では、基板処理プログラムは、制御手段26によって基板保持手段22や処理液供給手段23を適宜制御して、基板2の処理を行う。
【0059】
基板処理プログラムは、基板処理工程後に、再度保持状態判断工程を実行し、基板2が正常に保持されていると判断した場合には、基板保持工程とは逆動作の基板保持解除工程及び基板受取工程とは逆動作の基板受渡工程を順に実行して基板2を基板搬送装置13へ受渡す。なお、基板2が正常に保持されていないと判断した場合には、基板2の処理を一時停止し、オペレーターに異常を報知し、異常が解消された場合には、再度上記保持状態判断工程を実行する。
【0060】
以上に説明したように、上記基板処理装置1では、基板2が正常に保持されたときに基板2の端縁部が存在する領域を撮影し、撮影した画像に基づいて基板2の保持状態を判断している。
【0061】
そのため、上記基板処理装置1では、基板2の材質や表面の状態などの影響を受けることなく基板2の保持状態の良否を判断することができるので、基板2の保持状態を正確に判断することができる。
【0062】
撮影する領域は、基板2の正常な保持状態において少なくとも基板2の端縁部が撮影できればよく、基板2だけでなく基板2の正常な保持状態において基板2の端縁部の周辺に存在する基板保持体32やカバー50や支柱51やカップ52などの他の部材をも撮影してもよい。基板保持体32が含まれる領域を撮影した場合には、基板2と基板保持体32との画像から基板2の基板保持体32による保持状態を精度よく検出することができる。
【0063】
また、撮影方法は、すくなくとも1枚の画像を撮影できればよく、複数枚の画像を撮影してもよい。たとえば、基板保持体32で保持する基板2の画像を複数枚撮影する場合、ケーシング53に対して固定したカメラ54を用いて基板2と1又は2個の基板保持体32を撮影し、その後、基板保持手段22で基板2を回転させて基板2と残りの基板保持体32を撮影することで異なる複数枚の画像を撮影してもよい。これによれば、1台のカメラ54だけで撮影することができ、装置構成を簡略化することができる。また、複数台のカメラ54を用いて同時に全ての基板保持体32を撮影するようにしてもよい。これによれば、1度に全ての基板保持体32を撮影することができるので、撮影工程に要する時間を短くすることができ、スループットを向上させることができる。さらに、ケーシング53に対して移動可能に装着したカメラ54を用いてカメラ54の撮影方向を変更させることで異なるアングルの複数枚の画像を撮影してもよい。基板2を回転させて基板保持体32を順次撮影する場合よりもカメラ54を移動させる方が少ない移動量で済むために、短時間で全ての基板保持体32を撮影することができる。したがって、撮影工程に要する時間を短くすることができ、スループットを向上させることができる。また、ズーム機能を有するカメラ54を用いて基板保持体32を大きく撮影してもよい。基板保持体32を大きく撮影することで基板2の保持状態をより判断しやすくできる。
【0064】
さらに、カメラ54としてラインセンサカメラを用い、ケーシング53に対してラインセンサカメラを固定し、基板保持手段22で基板2を1回転させることで、基板2の全外周端縁部を撮影してもよい。ラインセンサカメラを用いる場合、基板2を回転させて外周端縁部を撮影し続ける。そのため、撮影開始場所に関係なく1回転分の画像が撮影できればよく、基板保持体32の位置に制約されることなく撮影でき、撮影手段25や基板保持手段22の制御を簡素化することができる。
【0065】
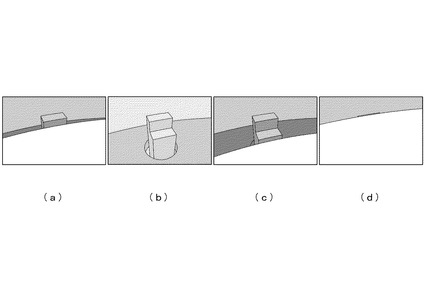
また、保持状態の判断方法は、撮影した画像に基づいて行われればよく、上記基準画像との比較による場合に限られない。たとえば、撮影した画像から基板2や基板保持体32などの特定の部材の面積を抽出し、その面積と予め定められた面積との比較から基板2の保持状態を判断してもよい。たとえば、基板2が基板保持体32で正常に保持されている場合には、図7(a)に示すように、基板2及び基板保持体32の一部が撮影された画像となる。したがって、抽出した面積が予め定められた面積の範囲内である場合には、基板2が基板保持体32で正常に保持されていると判断する。これに対して、抽出した面積が予め定められた面積の範囲外の場合には、基板2が基板保持体32で正常に保持されていないと判断する。
【0066】
また、撮影した画像から基板2とその他の基板保持体32やカバー50や支柱51やカップ52などの特定の部材との画像上での距離を計測し、その距離から基板2の保持状態を判断してもよい。たとえば、計測された画像上での距離と予め定められた距離とを比較し、画像上での距離が短い場合は基板2が基板保持体32に乗り上げており、画像上での距離が長い場合は基板2が脱落していると判断することができる。また、基板2と特定の部材との距離を複数箇所で計測し、それぞれの計測値同士を比較することで基板2の保持状態を判断してもよい。
【0067】
さらに、保持状態の判断内容は、基板2が正常に保持されているか否かが判断できればよく、基板2が正常に保持されていないときに、基板2が存在しない場合と、基板2が基板保持体32に乗り上げている場合と、基板2が基板保持体32よりも下方に脱落している場合などに分けて判断してもよい。基板2が基板保持体32で正常に保持されている場合には、図7(a)に示すように、基板2及び基板保持体32の一部が撮影された画像となる。これに対して、基板2が存在しない場合には、図7(b)に示すように、基板2によって基板保持体32が覆われることがなく、正常時よりも基板保持体32が非常に大きく撮影された画像となる。また、基板2が基板保持体32よりも下方に脱落している場合には、図7(c)に示すように、基板2によって基板保持体32に下部だけが覆われており、正常時よりも基板保持体32が大きく撮影された画像となる。さらに、基板2が基板保持体32に乗り上げている場合には、図7(d)に示すように、基板2によって基板保持体32の上部まで覆われており、正常時よりも基板保持体32が小さく撮影された画像となる。したがって、撮影した画像から基板保持体32の面積を抽出し、その抽出した面積が第1閾値以上の場合は基板2が存在しないと判断し、抽出した面積が第1閾値未満かつ第2閾値以上の場合は基板2が基板保持体32よりも下方に脱落していると判断し、抽出した面積が第2閾値未満かつ第3閾値以上の場合は基板2が正常に保持されていると判断し、抽出した面積が第3閾値未満の場合には基板2が基板保持体32に乗り上げていると判断する。閾値は基板保持体32ごとに設定することで、カメラ54の角度などによって基板保持体32の写り方が異なる場合でも正確に基板2の保持状態を判断することができる。このように、基板2の保持状態の異常を詳細に分けて判断することで、オペレーターが異常状態を円滑に解消することができる。なお、基板2を基板処理室14に搬入したにもかかわらず基板保持体32が全て画像に写った場合は基板2が割れた状態にあると判断することもできる。
【0068】
以上の説明では、本発明を基板処理装置1の基板処理室14〜21において基板2を保持するために用いられる基板保持装置に適用した場合について説明したが、本発明は、基板処理装置1の搬送室9の基板搬送装置8や基板搬送室12の基板搬送装置13において基板2を保持するために用いられる基板保持装置にも適用することができ、また、単独で基板2を搬送する基板搬送装置などにも適用することができる。この場合、基板搬送装置に撮影手段を備えてもよいし、基板処理装置内の所定の撮影場所に撮影手段を備えてもよい。
【符号の説明】
【0069】
1 基板処理装置
2 基板
22 基板保持手段
25 撮影手段
26 制御手段
27 記憶媒体
54 カメラ
55 ライト
【技術分野】
【0001】
本発明は、基板処理装置及び基板処理方法並びに基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体に関するものである。
【背景技術】
【0002】
従来より、半導体部品やフラットパネルディスプレイなどを製造する場合には、各製造工程において半導体ウエハや液晶基板などの基板を基板処理装置を用いて処理している。
【0003】
そして、基板処理装置においては、基板保持手段を用いて基板を保持した状態で搬送したり、基板保持手段を用いて基板を保持した状態で回転させながら洗浄やエッチングやレジスト塗布などの各種の処理を施している。
【0004】
従来の基板処理装置では、基板が基板保持手段によって正常に保持されているか否かを検出するために、基板保持手段で保持された基板の表面に向けて投光器からレーザー光を照射し、基板の表面での反射光の光量を受光器で検出し、その検出値に基づいて基板が正常に保持されているか否かを判断している(たとえば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−229403号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、上記従来の基板処理装置では、受光器で検出した光量の値と予め設定した閾値とを比較して基板が正常に保持されているか否かを判別しているために、基板が基板保持手段によって正常に保持されている場合であっても、基板の材質や表面(反射面)の状態などの影響で基板の表面の反射率が低いときには、受光器による検出値も低くなってしまう。
【0007】
そのため、従来の基板処理装置では、基板が基板保持手段によって正常に保持されている場合であっても、基板の材質や表面の状態などの影響によって受光器で検出される光量が閾値よりも低いときには、誤って基板が正常に保持されていないと判断してしまうおそれがあった。
【課題を解決するための手段】
【0008】
そこで、本発明では、基板処理装置において、基板を保持する基板保持手段と、前記基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影する撮影手段と、前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断する制御手段とを有することにした。
【0009】
また、前記撮影手段で撮影する領域は、前記基板保持手段に設けた前記基板を保持するための基板保持体を含む領域とした。
【0010】
また、前記撮影手段は、1度の撮影で複数の前記基板保持体を含む領域を撮影することにした。
【0011】
また、前記制御手段は、前記撮影手段で撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することにした。
【0012】
また、前記制御手段は、前記撮影手段で撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することにした。
【0013】
また、前記制御手段は、前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することにした。
【0014】
また、前記制御手段は、前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することにした。
【0015】
また、本発明では、基板処理方法において、基板が正常に保持されたときに前記基板の端縁部が存在する領域を撮影し、撮影した画像に基づいて前記基板の保持状態を判断することにした。
【0016】
また、前記基板を保持するための基板保持体を含む領域を撮影することにした。
【0017】
また、1度の撮影で複数の前記基板保持体を撮影することにした。
【0018】
また、撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することにした。
【0019】
また、撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することにした。
【0020】
また、前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することにした。
【0021】
また、前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することにした。
【0022】
また、本発明では、基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体において、撮影手段に、基板を保持する基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影させ、制御手段に、前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断させることにした。
【発明の効果】
【0023】
本発明では、基板の材質や表面の状態などに影響されることなく基板の保持状態を正確に判断することができる。
【図面の簡単な説明】
【0024】
【図1】基板処理装置を示す平面図。
【図2】基板搬送装置を示す斜視図。
【図3】基板処理室を示す正面断面図。
【図4】同平面図。
【図5】基板保持機構を示す動作説明図。
【図6】基板処理プログラムを示すフローチャート。
【図7】撮影された画像を示す説明図。
【発明を実施するための形態】
【0025】
以下に、本発明に係る基板処理装置の具体的な構成について図面を参照しながら説明する。
【0026】
図1に示すように、基板処理装置1は、前端部に基板2(ここでは、半導体ウエハ。)を複数枚(たとえば、25枚。)まとめてキャリア3で搬入及び搬出するための基板搬入出台4を設けるとともに、基板搬入出台4の後部にキャリア3に収容された基板2を搬送するための基板搬送ユニット5を設け、基板搬送ユニット5の後部に基板2の洗浄処理やエッチング処理等を行うための基板処理ユニット6を設けている。
【0027】
基板搬入出台4は、4個のキャリア3を基板搬送ユニット5の前壁7に密着させた状態で左右に間隔をあけて載置する。
【0028】
基板搬送ユニット5は、前側に基板搬送装置8を収容した搬送室9を形成するとともに、後側に基板受渡台10を収容した基板受渡室11を形成している。
【0029】
そして、基板搬送ユニット5では、基板搬送装置8を用いて基板搬入出台4に載置されたいずれか1個のキャリア3と基板受渡台10との間で基板2を搬送する。
【0030】
基板処理ユニット6は、中央部に前後に伸延する基板搬送室12を形成し、基板搬送室12の内部に基板搬送装置13を収容している。
【0031】
また、基板処理ユニット6は、基板搬送室12の一方側に第1〜第4の基板処理室14〜17を並べて配置するとともに、基板搬送室12の他方側に第5〜第8の基板処理室18〜21を並べて配置している。
【0032】
そして、基板処理ユニット6は、基板搬送装置13を用いて基板搬送ユニット5の基板受渡室11と各基板処理室14〜21との間で基板2を1枚ずつ水平に保持した状態で搬送し、各基板処理室14〜21で基板2を1枚ずつ処理する。
【0033】
基板搬送装置13は、図2に示すように、基板搬送室12の床部に敷設したレール56に基台57を移動可能に装着し、基台57の上部に回動機構58を取付け、回動機構58の上部にテーブル59を取付けている。また、基板搬送装置13は、テーブル59の上部に昇降機構60を取付け、昇降機構60にフォーク状の基板保持板61を取付け、基板保持板61の上面に基板2を保持するための基板保持体62を基板2の外周端縁に沿って円周方向に間隔をあけて取付けている。さらに、基板搬送装置13は、テーブル59に撮影手段としてのカメラ63を基板保持板61に向けて取付けている。カメラ63は、基板保持体62で基板2を保持している状態において基板2の端縁部が存在する領域に向けられており、基板2と基板保持体62を撮影する。このカメラ63は、後述する制御手段26に接続しており、制御手段26で駆動制御される。なお、搬送室9に設けた基板搬送装置8も同様の構成としている。
【0034】
各基板処理室14〜21は、同様の構成をしており、ここでは、代表して第1の基板処理室14の構成について説明する。
【0035】
基板処理室14は、図3〜図5に示すように、基板2を水平に保持しながら回転させるための基板保持手段22と、基板2の表面に処理液を供給するための処理液供給手段23と、基板2の表面に供給した処理液を回収する処理液回収手段24と、基板2の保持状態を撮影するための撮影手段25と、これらの基板保持手段22と処理液供給手段23と処理液回収手段24と撮影手段25を制御する制御手段26を有する。制御手段26は、記憶媒体27に記憶した各種プログラムに従って基板処理装置1の各動作を制御する。
【0036】
基板保持手段22は、中空円筒状の回転軸28の上端部に円板状のテーブル29を水平に取付けるとともに、テーブル29に基板2を水平に保持するための基板保持機構30を設けている。回転軸28には、回転駆動機構31を接続している。回転駆動機構31は、回転軸28及びテーブル29を回転させ、テーブル29に基板保持機構30で水平に保持した基板2を回転させる。この回転駆動機構31は、制御手段26に接続しており、制御手段26で回転制御される。
【0037】
基板保持機構30は、テーブル29の周縁部に基板2の外周端縁を挟持して基板2を水平に保持する複数個(ここでは、3個)の基板保持体32を円周方向に間隔をあけて取付けている。基板保持体32は、テーブル29の下面に形成したブラケット33にアーム部34の基端部を枢軸35を介して上下回動自在に取付け、アーム部34の基端側上部にテーブル29を貫通する保持部37を形成している。テーブル29の下面とアーム部34の上面との間には、アーム部34を下方へ向けて付勢するスプリング36を介設している。また、基板保持機構30は、アーム部34の先端側下部に駆動ロッド38を間隔をあけて配置している。駆動ロッド38には、昇降機構39を接続している。昇降機構39は、駆動ロッド38を昇降させ、それに連動して基板保持体32が開閉して、基板保持体32の閉塞時に保持部37が基板2の外周端縁を挟持して基板2を保持する。この昇降機構39は、制御手段26に接続しており、制御手段26で昇降制御(基板保持体32の開閉制御)される。
【0038】
また、基板保持手段22は、回転軸28の中空部に基板2を昇降させるための昇降ロッド40を昇降自在に設けるとともに、昇降ロッド40の上端部に円板状の昇降台41を取付け、昇降台41の上面に係止ピン42を取付けている。昇降ロッド40には、昇降機構43を接続している。昇降機構43は、昇降ロッド40及び昇降台41を昇降させ、係止ピン42で係止した基板2を昇降させる。この昇降機構43は、制御手段26に接続しており、制御手段26で昇降制御される。
【0039】
処理液供給手段23は、テーブル29よりも上方にアーム44を水平移動可能に配置し、アーム44の先端部にノズル45を取付けている。アーム44には、移動機構46を接続している。移動機構46は、ノズル45を基板2の外方の退避位置と基板2の中央上方の供給開始位置との間で移動させる。この移動機構46は、制御手段26に接続しており、制御手段26で移動制御される。
【0040】
また、処理液供給手段23は、処理液(洗浄液やリンス液やエッチング液など)を供給するための処理液供給源47にノズル45を流量調整器48と供給流路49を介して接続している。流量調整器48は、ノズル45に供給する処理液の流量を調整する。この流量調整器48は、制御手段26に接続しており、制御手段26で開閉制御及び流量制御される。
【0041】
処理液回収手段24は、テーブル29の上部に環状のカバー50を支柱51を介して取付けるとともに、テーブル29の周囲に上方を開口させるとともに図示しない排液管に接続させたカップ52を配置している。そして、処理液回収手段24は、テーブル29に載置した基板2をカバー50及びカップ52で囲んで処理液の飛散を防止するとともに処理液の回収をする。
【0042】
撮影手段25は、基板処理室14のケーシング53にカメラ54とライト55とをテーブル29に向けて取付けている。カメラ54及びライト55は、基板保持手段22で基板2を保持して停止している状態において基板2の端縁部が存在する領域に向けられており、基板2と基板保持体32を撮影する。このカメラ54及びライト55は、制御手段26に接続しており、制御手段26で駆動制御される。なお、ライト55は、カメラ54で撮影する領域の明暗によって無くしてもよく、複数個設けてもよい。また、ライト55は、撮影時に不要な影ができないような位置に設置する。ライト55は、赤外線を照射するものであってもよく、カメラ54は、可視光を遮断するフィルターを備えたものであってもよい。ライト55から赤外線を照射しつつカメラ54で赤外光以外の可視光を遮断することで、装置内外の明るさなどに左右されることなく撮影することができる。
【0043】
基板処理装置1は、以上に説明したように構成しており、制御手段26(コンピュータ)で読み取り可能な記憶媒体27に記憶した基板処理プログラムにしたがって各基板処理室14〜21で基板2を処理する。なお、記憶媒体27は、基板処理プログラム等の各種プログラムを記憶できる媒体であればよく、ROMやRAMなどの半導体メモリ型の記憶媒体であってもハードディスクやCD−ROMなどのディスク型の記憶媒体であってもよい。
【0044】
上記基板処理装置1では、図6に示す基板処理プログラムに従って基板2の処理を行う。なお、以下の説明では、代表して基板処理室14での基板2の処理について説明するが、他の基板処理室15〜21でも同様の処理を行う。
【0045】
まず、基板処理プログラムは、基板搬送装置13によって搬入される基板2を基板処理室14の基板保持手段22で受取る基板受取工程を実行する。
【0046】
この基板受取工程において基板処理プログラムは、制御手段26によって基板保持手段22の昇降機構43を制御して昇降ロッド40及び昇降台41をテーブル29よりも上方に上昇させて、係止ピン40が基板搬送装置13から基板2を受取る。
【0047】
基板2が基板処理室14に搬入されたとき、図5(a)に示すように、駆動ロッド38が降下した位置にあり、基板保持体32はスプリング36の付勢力で閉じた状態となっている。基板処理プログラムは、昇降ロッド40及び昇降台41を上昇させる際に、図5(b)に示すように、制御手段26によって基板保持機構30の昇降機構39を制御して駆動ロッド38を所定位置まで上昇させて、基板保持体32をスプリング36の付勢力に抗して開いた状態にする。
【0048】
その後、基板処理プログラムは、制御手段26によって基板保持手段22の昇降機構43を制御して昇降ロッド40及び昇降台41を降下させて、基板2を基板保持機構30の上部に載置する。
【0049】
ここで、基板2の位置が所定の範囲内の場合には、基板2は、図5(b)中で実線で示すように基板保持体32の保持部37の所定位置に正常に載置される。一方、基板2の位置が所定の範囲からずれている場合には、基板2は、図5(b)中で一点鎖線で示すように基板保持体32の保持部37の上部に載置されてしまったり、図5(b)中で二点鎖線で示すように基板保持体32の保持部37の下方へ脱落してしまう。
【0050】
次に、基板処理プログラムは、基板2を基板保持機構30で保持する基板保持工程を実行する。
【0051】
この基板保持工程において基板処理プログラムは、図5(c)に示すように、制御手段26によって基板保持機構30の昇降機構39を制御して駆動ロッド38を降下させて、基板保持体32をスプリング36の付勢力で閉じた状態にする。
【0052】
その際に、先の基板受取工程で基板2が基板保持体32の保持部37の所定位置に載置された場合には、基板2は、図5(c)中で実線で示すように基板2の端縁が基板保持体32の保持部37で良好に挟持されて正常に保持される。一方、基板受取工程で基板2が基板保持体32の保持部37の上部に載置された場合や基板2が下方に脱落した場合には、基板2は、図5(c)中で一点鎖線で示すように基板2の端縁が基板保持体32の保持部37の上部に乗り上げた状態や図5(c)中で二点鎖線で示すように基板2が基板保持体32の保持部37から脱落した状態となり、基板2は、正常に保持されない。
【0053】
次に、基板処理プログラムは、基板2の保持状態を判断する保持状態判断工程を実行する。
【0054】
この保持状態判断工程において基板処理プログラムは、制御手段26によって撮影手段25を制御し、ライト55を点灯させるとともにカメラ54に所定の領域を撮影させ、その後、ライト55を消灯させる(撮影工程)。
【0055】
その際に、基板処理装置1は、基板保持手段22で基板2を正常に保持した場合(図5(c)中で実線で示す状態の場合)に基板2の端縁部が存在する領域を撮影する。
【0056】
その後、基板処理プログラムは、カメラ54で撮影した画像に基づいて基板2の保持状態を判断する(判断工程)。この保持状態の判断は、たとえば、予め正常に基板2が保持されている状態の画像を撮影しておき、その画像を基準画像とし、実際の基板2の保持状態をカメラ54で撮影した画像と基準画像とを比較し、画像同士が一致する割合を算出し、その一致割合が所定値以上の場合には基板2が正常に保持されていると判断し、一方、一致割合が所定値未満の場合には基板2が正常に保持されていないと判断する。
【0057】
その後、基板処理プログラムは、基板2が正常に保持されていると判断した場合には、基板処理工程を実行し、基板2が正常に保持されていないと判断した場合には、基板2の処理を一時停止し、オペレーターに異常を報知する。なお、オペレーターによって異常が解消された場合には、再度上記保持状態判断工程を実行する。
【0058】
基板処理工程では、基板処理プログラムは、制御手段26によって基板保持手段22や処理液供給手段23を適宜制御して、基板2の処理を行う。
【0059】
基板処理プログラムは、基板処理工程後に、再度保持状態判断工程を実行し、基板2が正常に保持されていると判断した場合には、基板保持工程とは逆動作の基板保持解除工程及び基板受取工程とは逆動作の基板受渡工程を順に実行して基板2を基板搬送装置13へ受渡す。なお、基板2が正常に保持されていないと判断した場合には、基板2の処理を一時停止し、オペレーターに異常を報知し、異常が解消された場合には、再度上記保持状態判断工程を実行する。
【0060】
以上に説明したように、上記基板処理装置1では、基板2が正常に保持されたときに基板2の端縁部が存在する領域を撮影し、撮影した画像に基づいて基板2の保持状態を判断している。
【0061】
そのため、上記基板処理装置1では、基板2の材質や表面の状態などの影響を受けることなく基板2の保持状態の良否を判断することができるので、基板2の保持状態を正確に判断することができる。
【0062】
撮影する領域は、基板2の正常な保持状態において少なくとも基板2の端縁部が撮影できればよく、基板2だけでなく基板2の正常な保持状態において基板2の端縁部の周辺に存在する基板保持体32やカバー50や支柱51やカップ52などの他の部材をも撮影してもよい。基板保持体32が含まれる領域を撮影した場合には、基板2と基板保持体32との画像から基板2の基板保持体32による保持状態を精度よく検出することができる。
【0063】
また、撮影方法は、すくなくとも1枚の画像を撮影できればよく、複数枚の画像を撮影してもよい。たとえば、基板保持体32で保持する基板2の画像を複数枚撮影する場合、ケーシング53に対して固定したカメラ54を用いて基板2と1又は2個の基板保持体32を撮影し、その後、基板保持手段22で基板2を回転させて基板2と残りの基板保持体32を撮影することで異なる複数枚の画像を撮影してもよい。これによれば、1台のカメラ54だけで撮影することができ、装置構成を簡略化することができる。また、複数台のカメラ54を用いて同時に全ての基板保持体32を撮影するようにしてもよい。これによれば、1度に全ての基板保持体32を撮影することができるので、撮影工程に要する時間を短くすることができ、スループットを向上させることができる。さらに、ケーシング53に対して移動可能に装着したカメラ54を用いてカメラ54の撮影方向を変更させることで異なるアングルの複数枚の画像を撮影してもよい。基板2を回転させて基板保持体32を順次撮影する場合よりもカメラ54を移動させる方が少ない移動量で済むために、短時間で全ての基板保持体32を撮影することができる。したがって、撮影工程に要する時間を短くすることができ、スループットを向上させることができる。また、ズーム機能を有するカメラ54を用いて基板保持体32を大きく撮影してもよい。基板保持体32を大きく撮影することで基板2の保持状態をより判断しやすくできる。
【0064】
さらに、カメラ54としてラインセンサカメラを用い、ケーシング53に対してラインセンサカメラを固定し、基板保持手段22で基板2を1回転させることで、基板2の全外周端縁部を撮影してもよい。ラインセンサカメラを用いる場合、基板2を回転させて外周端縁部を撮影し続ける。そのため、撮影開始場所に関係なく1回転分の画像が撮影できればよく、基板保持体32の位置に制約されることなく撮影でき、撮影手段25や基板保持手段22の制御を簡素化することができる。
【0065】
また、保持状態の判断方法は、撮影した画像に基づいて行われればよく、上記基準画像との比較による場合に限られない。たとえば、撮影した画像から基板2や基板保持体32などの特定の部材の面積を抽出し、その面積と予め定められた面積との比較から基板2の保持状態を判断してもよい。たとえば、基板2が基板保持体32で正常に保持されている場合には、図7(a)に示すように、基板2及び基板保持体32の一部が撮影された画像となる。したがって、抽出した面積が予め定められた面積の範囲内である場合には、基板2が基板保持体32で正常に保持されていると判断する。これに対して、抽出した面積が予め定められた面積の範囲外の場合には、基板2が基板保持体32で正常に保持されていないと判断する。
【0066】
また、撮影した画像から基板2とその他の基板保持体32やカバー50や支柱51やカップ52などの特定の部材との画像上での距離を計測し、その距離から基板2の保持状態を判断してもよい。たとえば、計測された画像上での距離と予め定められた距離とを比較し、画像上での距離が短い場合は基板2が基板保持体32に乗り上げており、画像上での距離が長い場合は基板2が脱落していると判断することができる。また、基板2と特定の部材との距離を複数箇所で計測し、それぞれの計測値同士を比較することで基板2の保持状態を判断してもよい。
【0067】
さらに、保持状態の判断内容は、基板2が正常に保持されているか否かが判断できればよく、基板2が正常に保持されていないときに、基板2が存在しない場合と、基板2が基板保持体32に乗り上げている場合と、基板2が基板保持体32よりも下方に脱落している場合などに分けて判断してもよい。基板2が基板保持体32で正常に保持されている場合には、図7(a)に示すように、基板2及び基板保持体32の一部が撮影された画像となる。これに対して、基板2が存在しない場合には、図7(b)に示すように、基板2によって基板保持体32が覆われることがなく、正常時よりも基板保持体32が非常に大きく撮影された画像となる。また、基板2が基板保持体32よりも下方に脱落している場合には、図7(c)に示すように、基板2によって基板保持体32に下部だけが覆われており、正常時よりも基板保持体32が大きく撮影された画像となる。さらに、基板2が基板保持体32に乗り上げている場合には、図7(d)に示すように、基板2によって基板保持体32の上部まで覆われており、正常時よりも基板保持体32が小さく撮影された画像となる。したがって、撮影した画像から基板保持体32の面積を抽出し、その抽出した面積が第1閾値以上の場合は基板2が存在しないと判断し、抽出した面積が第1閾値未満かつ第2閾値以上の場合は基板2が基板保持体32よりも下方に脱落していると判断し、抽出した面積が第2閾値未満かつ第3閾値以上の場合は基板2が正常に保持されていると判断し、抽出した面積が第3閾値未満の場合には基板2が基板保持体32に乗り上げていると判断する。閾値は基板保持体32ごとに設定することで、カメラ54の角度などによって基板保持体32の写り方が異なる場合でも正確に基板2の保持状態を判断することができる。このように、基板2の保持状態の異常を詳細に分けて判断することで、オペレーターが異常状態を円滑に解消することができる。なお、基板2を基板処理室14に搬入したにもかかわらず基板保持体32が全て画像に写った場合は基板2が割れた状態にあると判断することもできる。
【0068】
以上の説明では、本発明を基板処理装置1の基板処理室14〜21において基板2を保持するために用いられる基板保持装置に適用した場合について説明したが、本発明は、基板処理装置1の搬送室9の基板搬送装置8や基板搬送室12の基板搬送装置13において基板2を保持するために用いられる基板保持装置にも適用することができ、また、単独で基板2を搬送する基板搬送装置などにも適用することができる。この場合、基板搬送装置に撮影手段を備えてもよいし、基板処理装置内の所定の撮影場所に撮影手段を備えてもよい。
【符号の説明】
【0069】
1 基板処理装置
2 基板
22 基板保持手段
25 撮影手段
26 制御手段
27 記憶媒体
54 カメラ
55 ライト
【特許請求の範囲】
【請求項1】
基板を保持する基板保持手段と、
前記基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影する撮影手段と、
前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断する制御手段と、
を有することを特徴とする基板処理装置。
【請求項2】
前記撮影手段で撮影する領域は、前記基板保持手段に設けた前記基板を保持するための基板保持体を含む領域としたことを特徴とする請求項1に記載の基板処理装置。
【請求項3】
前記撮影手段は、1度の撮影で複数の前記基板保持体を含む領域を撮影することを特徴とする請求項2に記載の基板処理装置。
【請求項4】
前記制御手段は、前記撮影手段で撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することを特徴とする請求項2又は請求項3に記載の基板処理装置。
【請求項5】
前記制御手段は、前記撮影手段で撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することを特徴とする請求項2又は請求項3に記載の基板処理装置。
【請求項6】
前記制御手段は、前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することを特徴とする請求項5に記載の基板処理装置。
【請求項7】
前記制御手段は、前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することを特徴とする請求項5に記載の基板処理装置。
【請求項8】
基板が正常に保持されたときに前記基板の端縁部が存在する領域を撮影し、撮影した画像に基づいて前記基板の保持状態を判断することを特徴とする基板処理方法。
【請求項9】
前記基板を保持するための基板保持体を含む領域を撮影することを特徴とする請求項8に記載の基板処理方法。
【請求項10】
1度の撮影で複数の前記基板保持体を撮影することを特徴とする請求項9に記載の基板処理方法。
【請求項11】
撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することを特徴とする請求項9又は請求項10に記載の基板処理方法。
【請求項12】
撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することを特徴とする請求項9又は請求項10に記載の基板処理方法。
【請求項13】
前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することを特徴とする請求項12に記載の基板処理方法。
【請求項14】
前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することを特徴とする請求項12に記載の基板処理方法。
【請求項15】
撮影手段に、基板を保持する基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影させ、
制御手段に、前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断させる、
ことを特徴とする基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体。
【請求項1】
基板を保持する基板保持手段と、
前記基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影する撮影手段と、
前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断する制御手段と、
を有することを特徴とする基板処理装置。
【請求項2】
前記撮影手段で撮影する領域は、前記基板保持手段に設けた前記基板を保持するための基板保持体を含む領域としたことを特徴とする請求項1に記載の基板処理装置。
【請求項3】
前記撮影手段は、1度の撮影で複数の前記基板保持体を含む領域を撮影することを特徴とする請求項2に記載の基板処理装置。
【請求項4】
前記制御手段は、前記撮影手段で撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することを特徴とする請求項2又は請求項3に記載の基板処理装置。
【請求項5】
前記制御手段は、前記撮影手段で撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することを特徴とする請求項2又は請求項3に記載の基板処理装置。
【請求項6】
前記制御手段は、前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することを特徴とする請求項5に記載の基板処理装置。
【請求項7】
前記制御手段は、前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することを特徴とする請求項5に記載の基板処理装置。
【請求項8】
基板が正常に保持されたときに前記基板の端縁部が存在する領域を撮影し、撮影した画像に基づいて前記基板の保持状態を判断することを特徴とする基板処理方法。
【請求項9】
前記基板を保持するための基板保持体を含む領域を撮影することを特徴とする請求項8に記載の基板処理方法。
【請求項10】
1度の撮影で複数の前記基板保持体を撮影することを特徴とする請求項9に記載の基板処理方法。
【請求項11】
撮影された前記基板保持体の面積に基づいて前記基板の保持状態を判断することを特徴とする請求項9又は請求項10に記載の基板処理方法。
【請求項12】
撮影された前記基板の端縁部と前記基板保持体の周囲に設けられたカップとの距離に基づいて前記基板の保持状態を判断することを特徴とする請求項9又は請求項10に記載の基板処理方法。
【請求項13】
前記基板の端縁部と前記カップとの距離を予め定められた距離と比較して前記基板の保持状態を判断することを特徴とする請求項12に記載の基板処理方法。
【請求項14】
前記基板の端縁部と前記カップとの距離を複数個所で計測し、それぞれの計測値同士を比較して前記基板の保持状態を判断することを特徴とする請求項12に記載の基板処理方法。
【請求項15】
撮影手段に、基板を保持する基板保持手段で前記基板を正常に保持したときに前記基板の端縁部が存在する領域を撮影させ、
制御手段に、前記撮影手段で撮影した画像に基づいて前記基板保持手段による前記基板の保持状態を判断させる、
ことを特徴とする基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−110270(P2013−110270A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254087(P2011−254087)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000219967)東京エレクトロン株式会社 (5,184)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000219967)東京エレクトロン株式会社 (5,184)
【Fターム(参考)】
[ Back to top ]