
基板処理装置
【課題】 自動生産効率の向上及び障害発生時のリカバリ処理の短縮を可能とする。
【解決手段】 第1の制御手段(主制御部12)と第2の制御手段11とを有する。主制御部12は、装置本体のサブユニット13を制御し、主制御部12とサブユニット13との間で送受信される第1の通信電文をロギングする。第2の制御手段11は、主制御部12とホストコンピュータ10との間に介在され、ホストコンピュータ10と主制御部12との間で送受信される第2の通信電文をロギングする。第2の制御手段11は、主制御部12によりロギングされる第1の通信電文を受け取ることにより、この受け取った第1の通信電文を第2の制御手段11によりロギングされる第2の通信電文の入出力状態であって、ホストコンピュータ10、第2の制御手段11、主制御部、及びサブユニット13間の入出力状態をディスプレイ11bに表示する。
【解決手段】 第1の制御手段(主制御部12)と第2の制御手段11とを有する。主制御部12は、装置本体のサブユニット13を制御し、主制御部12とサブユニット13との間で送受信される第1の通信電文をロギングする。第2の制御手段11は、主制御部12とホストコンピュータ10との間に介在され、ホストコンピュータ10と主制御部12との間で送受信される第2の通信電文をロギングする。第2の制御手段11は、主制御部12によりロギングされる第1の通信電文を受け取ることにより、この受け取った第1の通信電文を第2の制御手段11によりロギングされる第2の通信電文の入出力状態であって、ホストコンピュータ10、第2の制御手段11、主制御部、及びサブユニット13間の入出力状態をディスプレイ11bに表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロギング機能を有する基板処理装置に関する。
【背景技術】
【0002】
基板処理装置、例えば半導体製造装置は、種々の機能を有し、ホストコンピュータや、オペレータの指示に従い、主制御部でサブユニットの入出力I/Oを制御して、ウェハの移動/成膜/冷却を行う装置である。近年、機能が多種多様化し、主制御部等が制御しなければならない入出力I/Oは増大の一途をたどっている。そこで、自動生産効率の向上および障害発生時のリカバリ処理において、ホストコンピュータ/GUIとのコミュニケーション状態、サブユニットの動作状態の細部にわたる管理が重要となってくる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
基板処理装置において、自動生産効率の向上を図るためには、ウェハの成膜手続(プロセスレシピ)の他に、ウェハの搬送時間、圧力制御性能、温度制御性能等サブユニットの動作時間が重要な要素となってくる。また、障害発生時のリカバリ回復には、サブユニットの詳細な情報が重要な要素となってくる。
これまでは、ウェハの搬送先モジュール数が少なく、またサブユニットが低機能であったことにより、搬送時間の計測には時間がかからず、また障害発生時でも目視確認のみの単純なリカバリ処理を行えば回復可能であった。
ところが、近年、同一の基板処理装置において、他膜種をサポートする等により、ウェハの搬送先モジュール数が増大し、サブユニットが多機能化している。またウェハ搬送経路数の増大により、ウェハの搬送時間の計測に多くの時間を費やすこととなり、自動生産効率の向上が図れなかった。また、障害発生時、目視確認だけではサブユニットの詳細な情報を入手することが困難であり、目視確認後の単純なリカバリ処理だけでは回復できず、リカバリ処理に時間を費やしてしまうという問題があった。特に、基板処理装置が遠隔制御される場合には、現地保守員による障害解析作業に、多大な時間を費やしていた。
【0004】
本発明の課題は、上述した従来の問題点を解消して、自動生産効率の向上および障害発生時のリカバリ処理時間の短縮が可能な基板処理装置を提供することにある。
【課題を解決するための手段】
【0005】
第1の発明は、装置本体のサブユニットを制御する制御手段であって、該制御手段と前記サブユニットとの間で送受信される第1の通信電文をロギングする第1の制御手段と、前記第1の制御手段とホストコンピュータとの間に介在される制御手段であって、前記ホストコンピュータ及び前記第1の制御手段との間で送受信される第2の通信電文をロギングする第2の制御手段とを備えた基板処理装置において、前記第2の制御手段は、前記第1の制御手段によりロギングされる前記第1の通信電文を受け取ることにより、前記ホストコンピュータ、前記第2の制御手段、前記第1の制御手段、前記サブユニット間の入出力状態を表示可能な表示手段を有することを特徴とする基板処理装置である。
【0006】
ここで、サブユニットとは、温度制御ユニット、圧力制御ユニット、ウェハ搬送ユ
ニット、汎用I/O制御ユニット等の各ユニットをいう。また、入出力状態とは、入出力の関係を示す。さらに、ホストコンピュータ、第1の制御手段、第2の制御手段、およびサブユニット(これらを各構成部品という)の他、各構成部品間の入出力の関係(実施の形態で言えば図2における矢印)を表示した上で、各構成部品間の通信電文の種別や通信時刻、あるいは通信電文に対する応答電文が出されるまでの経過時間を表示してもよい。さらに、これらを1つの表示画面上に表示してもよい。
【0007】
第1の制御手段とサブユニットとの間で送受信される第1の通信電文は、第1の制御手段によりロギングされる。ホストコンピュータおよび第1の制御手段と第2の制御手段との間で送受信される第2の通信電文は、第2の制御手段によりロギングされる。第2の制御手段は、第1の制御手段によりロギングされる第1の通信電文を受け取ると、ロギングされる第2の通信電文とともに表示手段に表示するので、各構成部品間の入出力状態を表示できる。
【0008】
第2の発明は、半導体装置の製造方法において、装置本体のサブユニットとの間で送受信される第1の通信電文をロギングする第1の制御手段と、前記第1の制御手段およびホストコンピュータと第2の制御手段との間で送受信される第2の通信電文をロギングする第2の制御手段とを有する基板処理装置を用いて、前記第1の制御手段から前記ロギングされる通信電文を前記第2の制御手段で受け取って、前記ホストコンピュータ、第2の制御手段、第1の制御手段および前記サブユニット間の全ての通信電文の入出力状態を表示させることを特徴とする半導体装置の製造方法である。
【発明の効果】
【0009】
本発明によれば、各構成部品間の通信電文等の入出力状態を表示することが可能なので、通信電文等の入出力の解析に要する作業の労力と時間を大幅に低減することができる。特に、通信電文の入出力時の時刻と詳細データを表示可能とすると、ウェハ搬送時間の計測が容易に行える。又、障害発生時に、表示画面上で要因データを表示可能とすると、障害の要因を容易に解析できる。その結果、生産の効率向上、および障害発生時のリカバリ処理時間の短縮化を図ることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の一実施の形態を図面に即して説明する。
【0011】
図6および図7において、本発明の基板処理装置を適用した枚葉装置の概要を説明する。
【0012】
なお、本発明が適用される枚葉装置においてはウェハなどの基板を搬送するキャリヤとしては、FOUP(front opening unified pod 。以下、ポッドという。)が使用されている。また、以下の説明において、前後左右は図6を基準とする。すなわち、図6が示されている紙面に対して、前は紙面の下、後ろは紙面の上、左右は紙面の左右とする。
【0013】
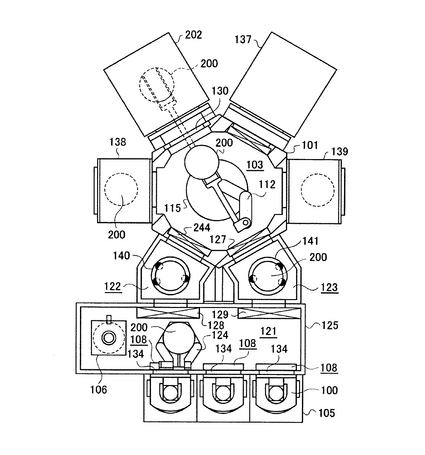
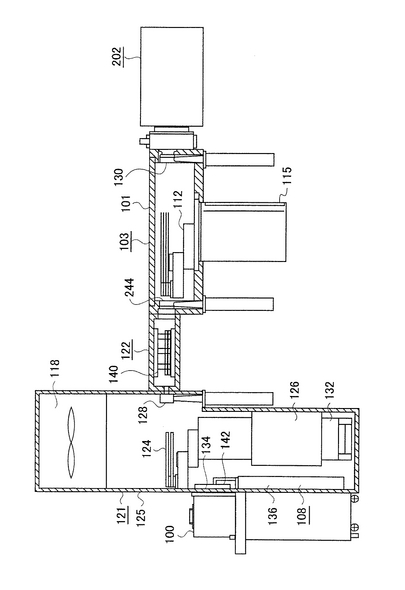
図6および図7に示されているように、枚葉装置は真空状態などの大気圧未満の圧力(負圧)に耐えるロードロックチャンバ構造に構成された第一の搬送室103を備えており、第一の搬送室103の筐体101は平面視が六角形で上下両端が閉塞した箱形状に形成されている。第一の搬送室103には負圧下でウェハ200を1枚又は2枚移載する第一のウェハ移載機112が設置されている。前記第一のウェハ移載機112は、エレベータ115によって、第一の搬送室103の気密性を維持しつつ昇降できるように構成されている。
【0014】
筐体101の六枚の側壁のうち前側に位置する二枚の側壁には、搬入用の予備室122と搬出用の予備室123とがそれぞれゲートバルブ244,127を介して連結されており、それぞれ負圧に耐え得るロードロックチャンバ構造に構成されている。さらに、予備室122には搬入室用の基板置き台140が設置され、予備室123には搬出室用の基板置き台141が設置されている。
【0015】
予備室122および予備室123の前側には、略大気圧下で用いられる第二の搬送室121がゲートバルブ128、129を介して連結されている。第二の搬送室121にはウェハ200を移載する第二のウェハ移載機124が設置されている。第二のウェハ移載機124は第二の搬送室121に設置されたエレベータ126によって昇降されるように構成されているとともに、リニアアクチュエータ132によって左右方向に往復移動されるように構成されている。
【0016】
図6に示されているように、第二の搬送室121の左側にはオリフラ合わせ装置106が設置されている。また、図7に示されているように、第二の搬送室121の上部にはクリーンエアを供給するクリーンユニット118が設置されている。
【0017】
図6および図7に示されているように、第二の搬送室121の筐体125には、ウェハ200を第二の搬送室121に対して搬入搬出するためのウェハ搬入搬出口134と、前記ウェハ搬入搬出口を閉塞する蓋142と、ポッドオープナ108がそれぞれ設置されている。ポッドオープナ108は、IOステージ105に載置されたポッド100のキャップおよびウェハ搬入搬出口134を閉塞する蓋142を開閉するキャップ開閉機構136とを備えており、IOステージ105に載置されたポッド100のキャップおよびウェハ搬入搬出口134を閉塞する蓋142をキャップ開閉機構136によって開閉することにより、ポッド100のウェハ出し入れを可能にする。また、ポッド100は図示しない工程内搬送装置(RGV)によって、前記IOステージ105に、供給および排出されるようになっている。
【0018】
図6に示されているように、筐体101の六枚の側壁のうち背面側に位置する二枚の側壁には、ウェハに所望の処理を行う第一の処理炉202と、第二の処理炉137とがそれぞれ隣接して連結されている。第一の処理炉202および第二の処理炉137はいずれもコールドウオール式の枚葉式処理炉によってそれぞれ構成され、ウェハを1枚又は2枚同時に処理できるようになっている。また、筐体101における六枚の側壁のうちの残りの互いに対向する二枚の側壁には、第三の処理炉としての第一のクーリングユニット138と、第四の処理炉としての第二のクーリングユニット139とがそれぞれ連結されており、第一のクーリングユニット138および第二のクーリングユニット139はいずれも処理済みのウェハ200を冷却するように構成されている。
【0019】
以下、前記構成をもつ枚葉装置を使用した処理工程を説明する。
【0020】
未処理のウェハ200は25枚がポッド100に収納された状態で、処理工程を実施する枚葉装置へ工程内搬送装置によって搬送されて来る。図6および図7に示されているように、搬送されて来たポッド100はIOステージ105の上に工程内搬送装置から受け渡されて載置される。ポッド100のキャップおよびウェハ搬入搬出口134を開閉する蓋142がキャップ開閉機構136によって取り外され、ポッド100のウェハ出し入れ口が開放される。
【0021】
ポッド100がポッドオープナ108により開放されると、第二の搬送室121に設置された第二のウェハ移載機124はポッド100からウェハ200をピックアップし、予備室122に搬入し、ウェハ200を基板置き台140に移載する。この移載作業中には、第一の搬送室103側のゲートバルブ244は閉じられており、第一の搬送室103の負圧は維持されている。ウェハ200の基板置き台140への移載が完了すると、ゲートバルブ128が閉じられ、予備室122が排気装置(図示せず)によって負圧に排気される。
【0022】
予備室122が予め設定された圧力値に減圧されると、ゲートバルブ244、130が開かれ、予備室122、第一の搬送室103、第一の処理炉202が連通される。続いて、第一の搬送室103の第一のウェハ移載機112は基板置き台140からウェハ200をピックアップして第一の処理炉202に搬入する。そして、第一の処理炉202内に処理ガスが供給され、所望の処理がウェハ200に行われる。
【0023】
第一の処理炉202で前記処理が完了すると、処理済みのウェハ200は第一の搬送室103の第一のウェハ移載機112によって第一の搬送室103に搬出される。
【0024】
そして、第一のウェハ移載機112は第一の処理炉202から搬出したウェハ200を第一のクーリングユニット138へ搬入し、処理済みのウェハを冷却する。
【0025】
第一のクーリングユニット138にウェハ200を移載すると、第一のウェハ移載機112は予備室122の基板置き台140に予め準備されたウェハ200を第一の処理炉202に前述した作動によって移載し、第一の処理炉202内に処理ガスが供給され、所望の処理がウェハ200に行われる。
【0026】
第一のクーリングユニット138において予め設定された冷却時間が経過すると、冷却済みのウェハ200は第一のウェハ移載機112によって第一のクーリングユニット138から第一の搬送室103に搬出される。
【0027】
冷却済みのウェハ200が第一のクーリングユニット138から第一の搬送室103に搬出されたのち、ゲートバルブ127が開かれる。そして、第1のウェハ移載機112は第一のクーリングユニット138から搬出したウェハ200を予備室123へ搬送し、基板置き台141に移載した後、予備室123はゲートバルブ127によって閉じられる。
【0028】
予備室123がゲートバルブ127によって閉じられると、前記排出用予備室123内が不活性ガスにより略大気圧に戻される。前記予備室123内が略大気圧に戻されると、ゲートバルブ129が開かれ、第二の搬送室121の予備室123に対応したウェハ搬入搬出口134を閉塞する蓋142と、IOステージ105に載置された空のポッド100のキャップがポッドオープナ108によって開かれる。続いて、第二の搬送室121の第二のウェハ移載機124は基板置き台141からウェハ200をピックアップして第二の搬送室121に搬出し、第二の搬送室121のウェハ搬入搬出口134を通してポッド100に収納して行く。処理済みの25枚のウェハ200のポッド100への収納が完了すると、ポッド100のキャップとウェハ搬入搬出口134を閉塞する蓋142がポッドオープナ108によって閉じられる。閉じられたポッド100はIOステージ105の上から次の工程へ工程内搬送装置によって搬送されて行く。
【0029】
以上の作動が繰り返されることにより、ウェハが、順次、処理されて行く。以上の作動は第一の処理炉202および第一のクーリングユニット138が使用される場合を例にして説明したが、第二の処理炉137および第二のクーリングユニット139が使用される場合についても同様の作動が実施される。
【0030】
なお、上述の枚葉装置では、予備室122を搬入用、予備室123を搬出用としたが、予備室123を搬入用、予備室122を搬出用としてもよい。また、第一の処理炉202と第二の処理炉137は、それぞれ同じ処理を行ってもよいし、別の処理を行ってもよい。第一の処理炉202と第二の処理炉137で別の処理を行う場合、例えば第一の処理炉202でウェハ200にある処理を行った後、続けて第二の処理炉137で別の処理を行わせてもよい。また、第一の処理炉202でウェハ200にある処理を行った後、第二の処理炉137で別の処理を行わせる場合、第一のクーリングユニット138(又は第二のクーリングユニット139)を経由するようにしてもよい。
【0031】
図1は、実施の形態による枚葉装置を制御するための制御系のブロック図である。
【0032】
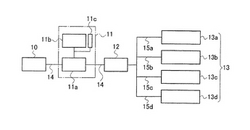
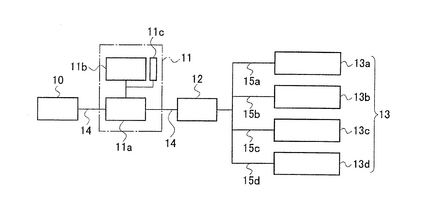
第1の制御手段としての主制御部12と、上位コンピュータとしてのホストコンピュータ10とは、第2の制御手段11を介してLAN回線14で接続することにより基板処理装置を遠隔制御することが可能になっている。
【0033】
主制御部12は、サブユニット13のI/O入出力を制御し、オペレータおよびホストコンピュータ10の指示にしたがってウェハの搬送/成膜を実行/管理する。ここで、サブユニット13は、ウェハ搬送ユニット(ウェハ搬送ロボット)13c、圧力制御ユニット13b、温度制御ユニット13a、汎用I/O制御ユニット13dなどの各ユニットから構成される。
また主制御部12は、温度制御ユニット13a、圧力制御ユニット13b、ウェハ搬送ユニット13c、汎用I/O制御ユニット13dとの第1の通信電文を入出力(送受信)するたびに時刻と共に詳細データをロギングする。ここで第1の通信電文は、主制御部12から所定の電文プロトコルに基づいてサブユニット13に引渡される通信電文であり、又はサブユニット13から主制御部12に引渡される通信電文である。例えば、対象となるサブユニット13がウェハ搬送ユニット13cの場合には、出力通信電文としてウェハ搬送要求、入力通信電文としてウェハ搬送応答を挙げることができる。主制御部12はこれらの通信電文をロギングできるようになっている。
【0034】
ホストコンピュータ10は、ウェハの自動搬送/自動成膜生産の指示および経過情報の収集を行う。また、第2の制御手段11は主制御部12との間及びホストコンピュータ10との間の第2の通信電文の入出力(送受信)をロギングする。ここで第2の通信電文は、ホストコンピュータ10から、前記電文プロトコルに基づいて主制御部12に引渡される出力通信電文であり、又は主制御部12から、第2の制御手段11を介して、ホストコンピュータ10に引渡される入力通信電文である。例えば、上述したのと同様に、ウェハ搬送要求、ウェハ搬送確認を挙げることができる。
【0035】
第2の制御手段11は、ホストコンピュータ10および主制御部12から前記通信電文の入出力を受け取ることにより、各構成部品の間の全ての通信電文の入出力状態を一括表示する機能を有する。各構成部品とは、ホストコンピュータ10、第2の制御手段11、主制御部12、およびサブユニット13のことをいう。また、ここで一括表示とは、ホストコンピュータ10からサブユニット13に至る各構成部品を表示するとともに、各構成部品間の入出力関係を表示することをいう。第2の制御手段11は、GUI(Graphical User Interface)11aと、GUI11aに接続された操作部(11b,11c)とを備える。操作部は、一括表示要求などのオペレータの指示等を与える入力デバイス11cと、一括表示要求により通信電文の入出力状態を一括表示する等のための表示装置(ディスプレイ11b)とを備える。
【0036】
GUI11aは、ホストコンピュータ10および主制御部12との間で第2の通信電文を入出力されるたびに、時刻と共に詳細データをロギングする。また、表示要求があったときは、主制御部12によりロギングされる第1の通信電文を受け取り、ロギングされる第2の通信電文と共に記憶する。このGUI11aは、図示しないが、ロギングデータを記憶する記憶手段と、ディスプレイ11bを制御する表示制御部等を有する。
【0037】
上記主制御部12は、シリアル回線15a〜15cを介して温度制御ユニット13a、圧力制御ユニット13b、およびウェハ搬送ユニット13cに接続されている。また、主制御部12はデバイスネット15dを介して汎用I/O制御ユニット13dにも接続されている。ここでデバイスネットとは、センサ、リミットスイッチなどの各種デバイス(機器)を相互接続し、シリアル通信を行う世界標準のフィールドネットワークである。
【0038】
主制御部12は、温度制御ユニット13aへ温度設定要求を出力し、温度制御ユニット13aから温度設定応答を入力されるようになっている。また、圧力制御ユニット13bへ圧力設定要求を出力し、圧力制御ユニット13bから圧力設定応答を入力されるようになっている。また、ウェハ搬送ユニット13cへウェハ搬送要求を出力し、ウェハ搬送ユニット13cからウェハ搬送応答を入力されるようになっている。さらに、汎用I/O制御ユニット13dからセンサのON通知等を取り込み、ウェハ搬送ユニット13cなどのアクチュエータに制御信号を出力するようになっている。上記センサには、例えば温度センサ、圧力センサ、マスフローモニタ、エンコーダ、電磁弁センサ等を挙げることができる。また、アクチュエータには、ヒータ、圧力弁、マスフローコントローラ、モータ、電磁弁等を挙げることができる。
【0039】
上記温度制御ユニット13aは、例えばヒータと、ヒータ温度を測定する温度センサと、温度センサの測定値に基づいてヒータに供給する電力を制御してヒータ温度を所定値に制御する温度コントローラから構成される。圧力制御ユニット13bは、例えば排気系に設けられる圧力弁と、ロードロックチャンバ構造の処理炉137、202、搬送室103等の圧力を測定する圧力センサと、圧力センサの測定値に基づいて圧力弁を制御して圧力を所定値に制御する圧力コントローラから構成される。ウェハ搬送ユニット13cは、例えば第一のウェハ移載機112と、この移載機112を制御するメカニズムコントローラとから構成される。汎用I/O制御ユニット13dは、例えば汎用I/O、および汎用I/Oを制御するI/Oコントローラとから構成される。
【0040】
上述したようにGUI11aは、ホストコンピュータ10および主制御部12と第2の制御手段11との間で入出力される第2の通信電文を入出力されるたびに、時刻と共に詳細データをロギングする。また、表示要求があったときは、主制御部12およびサブユニット13との間で入出力されて、主制御部12でロギングされた第1の通信電文を受け取り、これをロギングされた第2の通信電文と共に記憶する。
【0041】
このGUI11aは、具体的には、図5のフローチャートにしたがって、図2のような入出力I/O解析表示画面19を提供し、ユーザオペレーションにより時刻と共に詳細データをディスプレイ11bに一括表示する。
【0042】
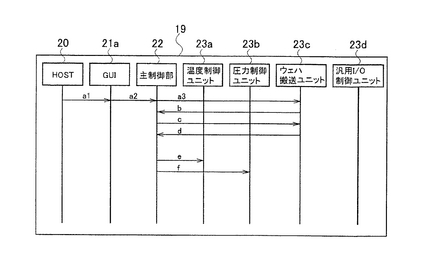
図2はディスプレイ11bにおける入出力I/O解析表示画面19の一括表示例を示す。この画面上部に横並びに、各構成部品に対応するシンボル(以下、単に各構成部品)が表示されている。シンボルは左から順に、ホストコンピュータ20、GUI21a、主制御部22、温度制御ユニット23a、圧力制御ユニット23b、ウェハ搬送ユニット23c、汎用I/O制御ユニット23dを示す。水平の矢印が通信電文の流れを示し、各構成部品から垂下した縦線が時間軸を示す。
【0043】
図示例では、ホストコンピュータ20から通信電文a1がGUI21aに渡され、GUI21aから通信電文a2が主制御部22に渡され、主制御部22からウェハ搬送ユニット23cに通信電文a3が渡されている。通信電文a3を渡されたウェハ搬送ユニット23cは、その通信電文a3に応答する通信電文bを主制御部22に返す。通信電文bを返された主制御部22は、それを受けてウェハ搬送ユニット23cに通信電文cを渡す。その通信電文cを受け取ったウェハ搬送ユニット23cは、主制御部22に通信電文dを返す。また主制御部22は、通信電文eを温度制御ユニット23aに渡し、通信電文fを圧力制御ユニット23bに渡す。
このように各構成部品(20、21a、22、23a、23b、23c、23d)の全ての通信電文の入出力状態がディスプレイ11bに一括表示される。
かくして基板処理装置内で通信電文を送受信する全ての構成部品間及び基板処理装置とホストコンピュータ20間の通信電文の入出力の関係がディスプレイ11bの同一画面上に一括して時系列に表示される。
【0044】
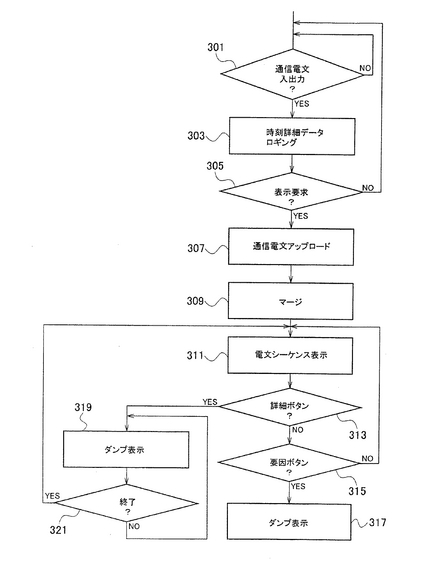
図5に本実施の形態におけるフローチャートの一例を示す。
図2に示すような表示画面19を表示する際、GUI11aは、通信電文の入出力の有無を判断し(ステップ301)、通信電文の入出力があったときは、時刻とともに詳細データをロギングする(ステップ303)。ロギング後、表示要求待ちに入り(ステップ305)、表示要求があったときは、主制御部12内にロギングされた通信電文データをアップロードし(ステップ307)、第2の通信電文である自分のロギングデータとともに時刻順にマージ、すなわち複数の通信電文データを併合して1つの通信電文データを作成し(ステップ309)、その通信電文データを読み出して電文シーケンスの入出力状態を一括表示する(ステップ311)。
【0045】
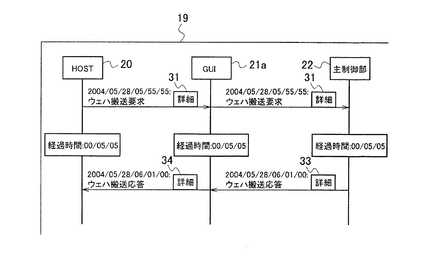
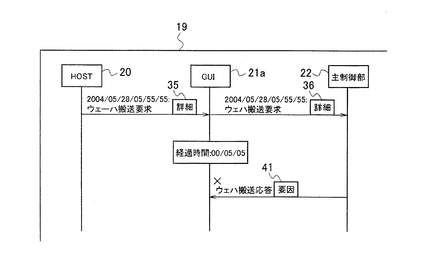
図3に、表示画面19に表示されたホストコンピュータ20、GUI21aおよび主制御部22の入出力状態の部分を拡大して示す。この例では、ホストコンピュータ20からGUI21aに向う矢印上に、通信電文「2004/05/28/05/55/55:ウェハ搬送要求」が表示される。GUI21aから主制御部22に向う矢印上に、転送される通信電文が表示される。この通信電文を受け取った主制御部22から応答通信電文が出されるまでに要した経過時間:00/05/05がホストコンピュータ20、GUI21a、および主制御部22の時間軸上にそれぞれ表示される。上記経過時間に相当する時間軸上の位置に左側に向う矢印が表示される。主制御部22からGUI21aに向う矢印上に、通信電文「2004/05/28/06/01/00:ウェハ搬送応答」が表示される。GUI21aからホストコンピュータ20に向う矢印上に、転送される通信電文が表示される。したがって、ホストインタフェースを即座に確認できる。
【0046】
表示された各通信電文の後尾には[詳細]ボタン31〜34が表示され、ボタン押下の判断待ち状態にある(ステップ313)。この[詳細]ボタン31〜34を押下すると、その当該通信電文の詳細データがダンプ表示される(ステップ319)。ホストコンピュータ10から出力された通信電文のダンプ表示を例示すれば次の通りである。
【0047】
2004/05/28/05/55/55:ウェハ搬送要求
(LM1:スロット1→PM1:スロット1)
電文ヘッダ S:7 F:94電文長:64バイト
データ0:000001000000300000FF …LM1
10:1103AB000000455352000 :1TOPM1TO
ロードロックモジュール1(予備室122)のスロット1からプロセスモジュール(第一の処理炉202)へのウェハ搬送要求である。
【0048】
また、障害発生時は、入出力I/O解析表示画面19は、図4のように表示される。図示例では、搬送要求表示は、図3と同じであり、異なる点は、経過時間表示および搬送応答表示である。
GUI21aの時間軸上に経過時間:00/05/05が表示され、経過時間に相当する主制御部22およびGUI21aの時間軸上の位置間に、主制御部22からGUI21aに引かれた矢印上に、「×ウェハ搬送応答」が表示される。この表示は、主制御部22からGUI21aに当該ウェハ搬送要求の通信電文に対するウェハ搬送応答が返って来ないことを意味している。応答通信電文の後尾には[要因]ボタン41が表示され、ボタン押下の判断待ち状態にある(ステップ315)。
この[要因]ボタン41を押下すると、その内容(応答受信タイムアウト、実行失敗応答受信)等がダンプ表示される(ステップ317)。その表示内容を例示すれば次の通りである。
【0049】
2004/05/28/06/01/00:ウェハ搬送応答
(LM1:スロット1→PM1:スロット1)
搬送失敗:真空ロボット通信エラー
電文ヘッダ S:7 F:94電文長:64バイト
データ0:00000100000000000000 …FAILED…
ロードロックモジュール1(予備室122)のスロット1からプロセスモジュール(第一の処理炉202)へのウェハ搬送要求が、真空ロボット(第一のウェハ移載機112)の通信エラーにより、真空ロボットに届かず、搬送が失敗したことを意味する。
【0050】
なお、全電文を時刻でロギングするため、表示画面19はスクロールにて表示するようにする。また、時刻/電文種別/エラー発生時刻にてその画面にジャンプできるようにする。
【0051】
上述したように実施の形態によれば、全ての入出力I/Oの状態を逐次ロギングし、そのロギングデータをディスプレイの画面上に一括表示するようにしたので、ホストインタフェースの確認時間の短縮、ウェハ搬送時間計測作業の短縮、および現地保守員による障害解析作業の短縮が可能となる。
【0052】
また、上述した実施の形態では、ウェハ搬送ユニット13cに対する通信電文例について説明した。その他のユニット13a、13b、13dに対する通信電文を例示すれば次の通りである。温度制御ユニット13aの場合には、「温度設定要求」、「温度設定応答」を挙げることができる。また、圧力制御ユニット13bの場合には、「圧力設定要求」、「圧力設定応答」を挙げることができる。また、汎用I/O制御ユニット13dの場合には、「大気圧センサON通知」などを挙げることができる。
【0053】
また、本実施の形態では、同時に1枚ないし2枚程度のウェハを処理する枚葉装置について説明したが、本発明はこれに限定されず、同時に多数枚のウェハを処理する縦型装置又は横型装置にも適用できる。また、本発明は、半導体基板基板に限定されず、基板処理を行う装置であれば、いずれにも適用できる。例えば、基板処理装置として、半導体製造装置だけでなくLCD装置のようなガラス基板を処理する装置にも適用できる。さらに処理炉内の処理は、CVDに限定されず、酸化、拡散、アニール等いずれに処理にも適用できる。
【図面の簡単な説明】
【0054】
【図1】実施の形態による基板処理装置のブロック構成図である。
【図2】実施の形態による入出力I/O解析画面である。
【図3】実施の形態による入出力I/O解析画面拡大図である。
【図4】実施の形態による入出力I/O解析画面障害発生時拡大図である。
【図5】実施の形態によるGUIの機能を説明するフローチャートである。
【図6】本発明の基板処理装置を適用した枚葉装置の概要平断面図である。
【図7】本発明の基板処理装置を適用した枚葉装置の概要縦断面図である。
【符号の説明】
【0055】
10 ホストコンピュータ
11 第2の制御手段
12 主制御部(第1の制御手段)
13 サブユニット
11a GUI(Graphical User Interface)
11b ディスプレイ
11c 入力デバイス
【技術分野】
【0001】
本発明は、ロギング機能を有する基板処理装置に関する。
【背景技術】
【0002】
基板処理装置、例えば半導体製造装置は、種々の機能を有し、ホストコンピュータや、オペレータの指示に従い、主制御部でサブユニットの入出力I/Oを制御して、ウェハの移動/成膜/冷却を行う装置である。近年、機能が多種多様化し、主制御部等が制御しなければならない入出力I/Oは増大の一途をたどっている。そこで、自動生産効率の向上および障害発生時のリカバリ処理において、ホストコンピュータ/GUIとのコミュニケーション状態、サブユニットの動作状態の細部にわたる管理が重要となってくる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
基板処理装置において、自動生産効率の向上を図るためには、ウェハの成膜手続(プロセスレシピ)の他に、ウェハの搬送時間、圧力制御性能、温度制御性能等サブユニットの動作時間が重要な要素となってくる。また、障害発生時のリカバリ回復には、サブユニットの詳細な情報が重要な要素となってくる。
これまでは、ウェハの搬送先モジュール数が少なく、またサブユニットが低機能であったことにより、搬送時間の計測には時間がかからず、また障害発生時でも目視確認のみの単純なリカバリ処理を行えば回復可能であった。
ところが、近年、同一の基板処理装置において、他膜種をサポートする等により、ウェハの搬送先モジュール数が増大し、サブユニットが多機能化している。またウェハ搬送経路数の増大により、ウェハの搬送時間の計測に多くの時間を費やすこととなり、自動生産効率の向上が図れなかった。また、障害発生時、目視確認だけではサブユニットの詳細な情報を入手することが困難であり、目視確認後の単純なリカバリ処理だけでは回復できず、リカバリ処理に時間を費やしてしまうという問題があった。特に、基板処理装置が遠隔制御される場合には、現地保守員による障害解析作業に、多大な時間を費やしていた。
【0004】
本発明の課題は、上述した従来の問題点を解消して、自動生産効率の向上および障害発生時のリカバリ処理時間の短縮が可能な基板処理装置を提供することにある。
【課題を解決するための手段】
【0005】
第1の発明は、装置本体のサブユニットを制御する制御手段であって、該制御手段と前記サブユニットとの間で送受信される第1の通信電文をロギングする第1の制御手段と、前記第1の制御手段とホストコンピュータとの間に介在される制御手段であって、前記ホストコンピュータ及び前記第1の制御手段との間で送受信される第2の通信電文をロギングする第2の制御手段とを備えた基板処理装置において、前記第2の制御手段は、前記第1の制御手段によりロギングされる前記第1の通信電文を受け取ることにより、前記ホストコンピュータ、前記第2の制御手段、前記第1の制御手段、前記サブユニット間の入出力状態を表示可能な表示手段を有することを特徴とする基板処理装置である。
【0006】
ここで、サブユニットとは、温度制御ユニット、圧力制御ユニット、ウェハ搬送ユ
ニット、汎用I/O制御ユニット等の各ユニットをいう。また、入出力状態とは、入出力の関係を示す。さらに、ホストコンピュータ、第1の制御手段、第2の制御手段、およびサブユニット(これらを各構成部品という)の他、各構成部品間の入出力の関係(実施の形態で言えば図2における矢印)を表示した上で、各構成部品間の通信電文の種別や通信時刻、あるいは通信電文に対する応答電文が出されるまでの経過時間を表示してもよい。さらに、これらを1つの表示画面上に表示してもよい。
【0007】
第1の制御手段とサブユニットとの間で送受信される第1の通信電文は、第1の制御手段によりロギングされる。ホストコンピュータおよび第1の制御手段と第2の制御手段との間で送受信される第2の通信電文は、第2の制御手段によりロギングされる。第2の制御手段は、第1の制御手段によりロギングされる第1の通信電文を受け取ると、ロギングされる第2の通信電文とともに表示手段に表示するので、各構成部品間の入出力状態を表示できる。
【0008】
第2の発明は、半導体装置の製造方法において、装置本体のサブユニットとの間で送受信される第1の通信電文をロギングする第1の制御手段と、前記第1の制御手段およびホストコンピュータと第2の制御手段との間で送受信される第2の通信電文をロギングする第2の制御手段とを有する基板処理装置を用いて、前記第1の制御手段から前記ロギングされる通信電文を前記第2の制御手段で受け取って、前記ホストコンピュータ、第2の制御手段、第1の制御手段および前記サブユニット間の全ての通信電文の入出力状態を表示させることを特徴とする半導体装置の製造方法である。
【発明の効果】
【0009】
本発明によれば、各構成部品間の通信電文等の入出力状態を表示することが可能なので、通信電文等の入出力の解析に要する作業の労力と時間を大幅に低減することができる。特に、通信電文の入出力時の時刻と詳細データを表示可能とすると、ウェハ搬送時間の計測が容易に行える。又、障害発生時に、表示画面上で要因データを表示可能とすると、障害の要因を容易に解析できる。その結果、生産の効率向上、および障害発生時のリカバリ処理時間の短縮化を図ることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の一実施の形態を図面に即して説明する。
【0011】
図6および図7において、本発明の基板処理装置を適用した枚葉装置の概要を説明する。
【0012】
なお、本発明が適用される枚葉装置においてはウェハなどの基板を搬送するキャリヤとしては、FOUP(front opening unified pod 。以下、ポッドという。)が使用されている。また、以下の説明において、前後左右は図6を基準とする。すなわち、図6が示されている紙面に対して、前は紙面の下、後ろは紙面の上、左右は紙面の左右とする。
【0013】
図6および図7に示されているように、枚葉装置は真空状態などの大気圧未満の圧力(負圧)に耐えるロードロックチャンバ構造に構成された第一の搬送室103を備えており、第一の搬送室103の筐体101は平面視が六角形で上下両端が閉塞した箱形状に形成されている。第一の搬送室103には負圧下でウェハ200を1枚又は2枚移載する第一のウェハ移載機112が設置されている。前記第一のウェハ移載機112は、エレベータ115によって、第一の搬送室103の気密性を維持しつつ昇降できるように構成されている。
【0014】
筐体101の六枚の側壁のうち前側に位置する二枚の側壁には、搬入用の予備室122と搬出用の予備室123とがそれぞれゲートバルブ244,127を介して連結されており、それぞれ負圧に耐え得るロードロックチャンバ構造に構成されている。さらに、予備室122には搬入室用の基板置き台140が設置され、予備室123には搬出室用の基板置き台141が設置されている。
【0015】
予備室122および予備室123の前側には、略大気圧下で用いられる第二の搬送室121がゲートバルブ128、129を介して連結されている。第二の搬送室121にはウェハ200を移載する第二のウェハ移載機124が設置されている。第二のウェハ移載機124は第二の搬送室121に設置されたエレベータ126によって昇降されるように構成されているとともに、リニアアクチュエータ132によって左右方向に往復移動されるように構成されている。
【0016】
図6に示されているように、第二の搬送室121の左側にはオリフラ合わせ装置106が設置されている。また、図7に示されているように、第二の搬送室121の上部にはクリーンエアを供給するクリーンユニット118が設置されている。
【0017】
図6および図7に示されているように、第二の搬送室121の筐体125には、ウェハ200を第二の搬送室121に対して搬入搬出するためのウェハ搬入搬出口134と、前記ウェハ搬入搬出口を閉塞する蓋142と、ポッドオープナ108がそれぞれ設置されている。ポッドオープナ108は、IOステージ105に載置されたポッド100のキャップおよびウェハ搬入搬出口134を閉塞する蓋142を開閉するキャップ開閉機構136とを備えており、IOステージ105に載置されたポッド100のキャップおよびウェハ搬入搬出口134を閉塞する蓋142をキャップ開閉機構136によって開閉することにより、ポッド100のウェハ出し入れを可能にする。また、ポッド100は図示しない工程内搬送装置(RGV)によって、前記IOステージ105に、供給および排出されるようになっている。
【0018】
図6に示されているように、筐体101の六枚の側壁のうち背面側に位置する二枚の側壁には、ウェハに所望の処理を行う第一の処理炉202と、第二の処理炉137とがそれぞれ隣接して連結されている。第一の処理炉202および第二の処理炉137はいずれもコールドウオール式の枚葉式処理炉によってそれぞれ構成され、ウェハを1枚又は2枚同時に処理できるようになっている。また、筐体101における六枚の側壁のうちの残りの互いに対向する二枚の側壁には、第三の処理炉としての第一のクーリングユニット138と、第四の処理炉としての第二のクーリングユニット139とがそれぞれ連結されており、第一のクーリングユニット138および第二のクーリングユニット139はいずれも処理済みのウェハ200を冷却するように構成されている。
【0019】
以下、前記構成をもつ枚葉装置を使用した処理工程を説明する。
【0020】
未処理のウェハ200は25枚がポッド100に収納された状態で、処理工程を実施する枚葉装置へ工程内搬送装置によって搬送されて来る。図6および図7に示されているように、搬送されて来たポッド100はIOステージ105の上に工程内搬送装置から受け渡されて載置される。ポッド100のキャップおよびウェハ搬入搬出口134を開閉する蓋142がキャップ開閉機構136によって取り外され、ポッド100のウェハ出し入れ口が開放される。
【0021】
ポッド100がポッドオープナ108により開放されると、第二の搬送室121に設置された第二のウェハ移載機124はポッド100からウェハ200をピックアップし、予備室122に搬入し、ウェハ200を基板置き台140に移載する。この移載作業中には、第一の搬送室103側のゲートバルブ244は閉じられており、第一の搬送室103の負圧は維持されている。ウェハ200の基板置き台140への移載が完了すると、ゲートバルブ128が閉じられ、予備室122が排気装置(図示せず)によって負圧に排気される。
【0022】
予備室122が予め設定された圧力値に減圧されると、ゲートバルブ244、130が開かれ、予備室122、第一の搬送室103、第一の処理炉202が連通される。続いて、第一の搬送室103の第一のウェハ移載機112は基板置き台140からウェハ200をピックアップして第一の処理炉202に搬入する。そして、第一の処理炉202内に処理ガスが供給され、所望の処理がウェハ200に行われる。
【0023】
第一の処理炉202で前記処理が完了すると、処理済みのウェハ200は第一の搬送室103の第一のウェハ移載機112によって第一の搬送室103に搬出される。
【0024】
そして、第一のウェハ移載機112は第一の処理炉202から搬出したウェハ200を第一のクーリングユニット138へ搬入し、処理済みのウェハを冷却する。
【0025】
第一のクーリングユニット138にウェハ200を移載すると、第一のウェハ移載機112は予備室122の基板置き台140に予め準備されたウェハ200を第一の処理炉202に前述した作動によって移載し、第一の処理炉202内に処理ガスが供給され、所望の処理がウェハ200に行われる。
【0026】
第一のクーリングユニット138において予め設定された冷却時間が経過すると、冷却済みのウェハ200は第一のウェハ移載機112によって第一のクーリングユニット138から第一の搬送室103に搬出される。
【0027】
冷却済みのウェハ200が第一のクーリングユニット138から第一の搬送室103に搬出されたのち、ゲートバルブ127が開かれる。そして、第1のウェハ移載機112は第一のクーリングユニット138から搬出したウェハ200を予備室123へ搬送し、基板置き台141に移載した後、予備室123はゲートバルブ127によって閉じられる。
【0028】
予備室123がゲートバルブ127によって閉じられると、前記排出用予備室123内が不活性ガスにより略大気圧に戻される。前記予備室123内が略大気圧に戻されると、ゲートバルブ129が開かれ、第二の搬送室121の予備室123に対応したウェハ搬入搬出口134を閉塞する蓋142と、IOステージ105に載置された空のポッド100のキャップがポッドオープナ108によって開かれる。続いて、第二の搬送室121の第二のウェハ移載機124は基板置き台141からウェハ200をピックアップして第二の搬送室121に搬出し、第二の搬送室121のウェハ搬入搬出口134を通してポッド100に収納して行く。処理済みの25枚のウェハ200のポッド100への収納が完了すると、ポッド100のキャップとウェハ搬入搬出口134を閉塞する蓋142がポッドオープナ108によって閉じられる。閉じられたポッド100はIOステージ105の上から次の工程へ工程内搬送装置によって搬送されて行く。
【0029】
以上の作動が繰り返されることにより、ウェハが、順次、処理されて行く。以上の作動は第一の処理炉202および第一のクーリングユニット138が使用される場合を例にして説明したが、第二の処理炉137および第二のクーリングユニット139が使用される場合についても同様の作動が実施される。
【0030】
なお、上述の枚葉装置では、予備室122を搬入用、予備室123を搬出用としたが、予備室123を搬入用、予備室122を搬出用としてもよい。また、第一の処理炉202と第二の処理炉137は、それぞれ同じ処理を行ってもよいし、別の処理を行ってもよい。第一の処理炉202と第二の処理炉137で別の処理を行う場合、例えば第一の処理炉202でウェハ200にある処理を行った後、続けて第二の処理炉137で別の処理を行わせてもよい。また、第一の処理炉202でウェハ200にある処理を行った後、第二の処理炉137で別の処理を行わせる場合、第一のクーリングユニット138(又は第二のクーリングユニット139)を経由するようにしてもよい。
【0031】
図1は、実施の形態による枚葉装置を制御するための制御系のブロック図である。
【0032】
第1の制御手段としての主制御部12と、上位コンピュータとしてのホストコンピュータ10とは、第2の制御手段11を介してLAN回線14で接続することにより基板処理装置を遠隔制御することが可能になっている。
【0033】
主制御部12は、サブユニット13のI/O入出力を制御し、オペレータおよびホストコンピュータ10の指示にしたがってウェハの搬送/成膜を実行/管理する。ここで、サブユニット13は、ウェハ搬送ユニット(ウェハ搬送ロボット)13c、圧力制御ユニット13b、温度制御ユニット13a、汎用I/O制御ユニット13dなどの各ユニットから構成される。
また主制御部12は、温度制御ユニット13a、圧力制御ユニット13b、ウェハ搬送ユニット13c、汎用I/O制御ユニット13dとの第1の通信電文を入出力(送受信)するたびに時刻と共に詳細データをロギングする。ここで第1の通信電文は、主制御部12から所定の電文プロトコルに基づいてサブユニット13に引渡される通信電文であり、又はサブユニット13から主制御部12に引渡される通信電文である。例えば、対象となるサブユニット13がウェハ搬送ユニット13cの場合には、出力通信電文としてウェハ搬送要求、入力通信電文としてウェハ搬送応答を挙げることができる。主制御部12はこれらの通信電文をロギングできるようになっている。
【0034】
ホストコンピュータ10は、ウェハの自動搬送/自動成膜生産の指示および経過情報の収集を行う。また、第2の制御手段11は主制御部12との間及びホストコンピュータ10との間の第2の通信電文の入出力(送受信)をロギングする。ここで第2の通信電文は、ホストコンピュータ10から、前記電文プロトコルに基づいて主制御部12に引渡される出力通信電文であり、又は主制御部12から、第2の制御手段11を介して、ホストコンピュータ10に引渡される入力通信電文である。例えば、上述したのと同様に、ウェハ搬送要求、ウェハ搬送確認を挙げることができる。
【0035】
第2の制御手段11は、ホストコンピュータ10および主制御部12から前記通信電文の入出力を受け取ることにより、各構成部品の間の全ての通信電文の入出力状態を一括表示する機能を有する。各構成部品とは、ホストコンピュータ10、第2の制御手段11、主制御部12、およびサブユニット13のことをいう。また、ここで一括表示とは、ホストコンピュータ10からサブユニット13に至る各構成部品を表示するとともに、各構成部品間の入出力関係を表示することをいう。第2の制御手段11は、GUI(Graphical User Interface)11aと、GUI11aに接続された操作部(11b,11c)とを備える。操作部は、一括表示要求などのオペレータの指示等を与える入力デバイス11cと、一括表示要求により通信電文の入出力状態を一括表示する等のための表示装置(ディスプレイ11b)とを備える。
【0036】
GUI11aは、ホストコンピュータ10および主制御部12との間で第2の通信電文を入出力されるたびに、時刻と共に詳細データをロギングする。また、表示要求があったときは、主制御部12によりロギングされる第1の通信電文を受け取り、ロギングされる第2の通信電文と共に記憶する。このGUI11aは、図示しないが、ロギングデータを記憶する記憶手段と、ディスプレイ11bを制御する表示制御部等を有する。
【0037】
上記主制御部12は、シリアル回線15a〜15cを介して温度制御ユニット13a、圧力制御ユニット13b、およびウェハ搬送ユニット13cに接続されている。また、主制御部12はデバイスネット15dを介して汎用I/O制御ユニット13dにも接続されている。ここでデバイスネットとは、センサ、リミットスイッチなどの各種デバイス(機器)を相互接続し、シリアル通信を行う世界標準のフィールドネットワークである。
【0038】
主制御部12は、温度制御ユニット13aへ温度設定要求を出力し、温度制御ユニット13aから温度設定応答を入力されるようになっている。また、圧力制御ユニット13bへ圧力設定要求を出力し、圧力制御ユニット13bから圧力設定応答を入力されるようになっている。また、ウェハ搬送ユニット13cへウェハ搬送要求を出力し、ウェハ搬送ユニット13cからウェハ搬送応答を入力されるようになっている。さらに、汎用I/O制御ユニット13dからセンサのON通知等を取り込み、ウェハ搬送ユニット13cなどのアクチュエータに制御信号を出力するようになっている。上記センサには、例えば温度センサ、圧力センサ、マスフローモニタ、エンコーダ、電磁弁センサ等を挙げることができる。また、アクチュエータには、ヒータ、圧力弁、マスフローコントローラ、モータ、電磁弁等を挙げることができる。
【0039】
上記温度制御ユニット13aは、例えばヒータと、ヒータ温度を測定する温度センサと、温度センサの測定値に基づいてヒータに供給する電力を制御してヒータ温度を所定値に制御する温度コントローラから構成される。圧力制御ユニット13bは、例えば排気系に設けられる圧力弁と、ロードロックチャンバ構造の処理炉137、202、搬送室103等の圧力を測定する圧力センサと、圧力センサの測定値に基づいて圧力弁を制御して圧力を所定値に制御する圧力コントローラから構成される。ウェハ搬送ユニット13cは、例えば第一のウェハ移載機112と、この移載機112を制御するメカニズムコントローラとから構成される。汎用I/O制御ユニット13dは、例えば汎用I/O、および汎用I/Oを制御するI/Oコントローラとから構成される。
【0040】
上述したようにGUI11aは、ホストコンピュータ10および主制御部12と第2の制御手段11との間で入出力される第2の通信電文を入出力されるたびに、時刻と共に詳細データをロギングする。また、表示要求があったときは、主制御部12およびサブユニット13との間で入出力されて、主制御部12でロギングされた第1の通信電文を受け取り、これをロギングされた第2の通信電文と共に記憶する。
【0041】
このGUI11aは、具体的には、図5のフローチャートにしたがって、図2のような入出力I/O解析表示画面19を提供し、ユーザオペレーションにより時刻と共に詳細データをディスプレイ11bに一括表示する。
【0042】
図2はディスプレイ11bにおける入出力I/O解析表示画面19の一括表示例を示す。この画面上部に横並びに、各構成部品に対応するシンボル(以下、単に各構成部品)が表示されている。シンボルは左から順に、ホストコンピュータ20、GUI21a、主制御部22、温度制御ユニット23a、圧力制御ユニット23b、ウェハ搬送ユニット23c、汎用I/O制御ユニット23dを示す。水平の矢印が通信電文の流れを示し、各構成部品から垂下した縦線が時間軸を示す。
【0043】
図示例では、ホストコンピュータ20から通信電文a1がGUI21aに渡され、GUI21aから通信電文a2が主制御部22に渡され、主制御部22からウェハ搬送ユニット23cに通信電文a3が渡されている。通信電文a3を渡されたウェハ搬送ユニット23cは、その通信電文a3に応答する通信電文bを主制御部22に返す。通信電文bを返された主制御部22は、それを受けてウェハ搬送ユニット23cに通信電文cを渡す。その通信電文cを受け取ったウェハ搬送ユニット23cは、主制御部22に通信電文dを返す。また主制御部22は、通信電文eを温度制御ユニット23aに渡し、通信電文fを圧力制御ユニット23bに渡す。
このように各構成部品(20、21a、22、23a、23b、23c、23d)の全ての通信電文の入出力状態がディスプレイ11bに一括表示される。
かくして基板処理装置内で通信電文を送受信する全ての構成部品間及び基板処理装置とホストコンピュータ20間の通信電文の入出力の関係がディスプレイ11bの同一画面上に一括して時系列に表示される。
【0044】
図5に本実施の形態におけるフローチャートの一例を示す。
図2に示すような表示画面19を表示する際、GUI11aは、通信電文の入出力の有無を判断し(ステップ301)、通信電文の入出力があったときは、時刻とともに詳細データをロギングする(ステップ303)。ロギング後、表示要求待ちに入り(ステップ305)、表示要求があったときは、主制御部12内にロギングされた通信電文データをアップロードし(ステップ307)、第2の通信電文である自分のロギングデータとともに時刻順にマージ、すなわち複数の通信電文データを併合して1つの通信電文データを作成し(ステップ309)、その通信電文データを読み出して電文シーケンスの入出力状態を一括表示する(ステップ311)。
【0045】
図3に、表示画面19に表示されたホストコンピュータ20、GUI21aおよび主制御部22の入出力状態の部分を拡大して示す。この例では、ホストコンピュータ20からGUI21aに向う矢印上に、通信電文「2004/05/28/05/55/55:ウェハ搬送要求」が表示される。GUI21aから主制御部22に向う矢印上に、転送される通信電文が表示される。この通信電文を受け取った主制御部22から応答通信電文が出されるまでに要した経過時間:00/05/05がホストコンピュータ20、GUI21a、および主制御部22の時間軸上にそれぞれ表示される。上記経過時間に相当する時間軸上の位置に左側に向う矢印が表示される。主制御部22からGUI21aに向う矢印上に、通信電文「2004/05/28/06/01/00:ウェハ搬送応答」が表示される。GUI21aからホストコンピュータ20に向う矢印上に、転送される通信電文が表示される。したがって、ホストインタフェースを即座に確認できる。
【0046】
表示された各通信電文の後尾には[詳細]ボタン31〜34が表示され、ボタン押下の判断待ち状態にある(ステップ313)。この[詳細]ボタン31〜34を押下すると、その当該通信電文の詳細データがダンプ表示される(ステップ319)。ホストコンピュータ10から出力された通信電文のダンプ表示を例示すれば次の通りである。
【0047】
2004/05/28/05/55/55:ウェハ搬送要求
(LM1:スロット1→PM1:スロット1)
電文ヘッダ S:7 F:94電文長:64バイト
データ0:000001000000300000FF …LM1
10:1103AB000000455352000 :1TOPM1TO
ロードロックモジュール1(予備室122)のスロット1からプロセスモジュール(第一の処理炉202)へのウェハ搬送要求である。
【0048】
また、障害発生時は、入出力I/O解析表示画面19は、図4のように表示される。図示例では、搬送要求表示は、図3と同じであり、異なる点は、経過時間表示および搬送応答表示である。
GUI21aの時間軸上に経過時間:00/05/05が表示され、経過時間に相当する主制御部22およびGUI21aの時間軸上の位置間に、主制御部22からGUI21aに引かれた矢印上に、「×ウェハ搬送応答」が表示される。この表示は、主制御部22からGUI21aに当該ウェハ搬送要求の通信電文に対するウェハ搬送応答が返って来ないことを意味している。応答通信電文の後尾には[要因]ボタン41が表示され、ボタン押下の判断待ち状態にある(ステップ315)。
この[要因]ボタン41を押下すると、その内容(応答受信タイムアウト、実行失敗応答受信)等がダンプ表示される(ステップ317)。その表示内容を例示すれば次の通りである。
【0049】
2004/05/28/06/01/00:ウェハ搬送応答
(LM1:スロット1→PM1:スロット1)
搬送失敗:真空ロボット通信エラー
電文ヘッダ S:7 F:94電文長:64バイト
データ0:00000100000000000000 …FAILED…
ロードロックモジュール1(予備室122)のスロット1からプロセスモジュール(第一の処理炉202)へのウェハ搬送要求が、真空ロボット(第一のウェハ移載機112)の通信エラーにより、真空ロボットに届かず、搬送が失敗したことを意味する。
【0050】
なお、全電文を時刻でロギングするため、表示画面19はスクロールにて表示するようにする。また、時刻/電文種別/エラー発生時刻にてその画面にジャンプできるようにする。
【0051】
上述したように実施の形態によれば、全ての入出力I/Oの状態を逐次ロギングし、そのロギングデータをディスプレイの画面上に一括表示するようにしたので、ホストインタフェースの確認時間の短縮、ウェハ搬送時間計測作業の短縮、および現地保守員による障害解析作業の短縮が可能となる。
【0052】
また、上述した実施の形態では、ウェハ搬送ユニット13cに対する通信電文例について説明した。その他のユニット13a、13b、13dに対する通信電文を例示すれば次の通りである。温度制御ユニット13aの場合には、「温度設定要求」、「温度設定応答」を挙げることができる。また、圧力制御ユニット13bの場合には、「圧力設定要求」、「圧力設定応答」を挙げることができる。また、汎用I/O制御ユニット13dの場合には、「大気圧センサON通知」などを挙げることができる。
【0053】
また、本実施の形態では、同時に1枚ないし2枚程度のウェハを処理する枚葉装置について説明したが、本発明はこれに限定されず、同時に多数枚のウェハを処理する縦型装置又は横型装置にも適用できる。また、本発明は、半導体基板基板に限定されず、基板処理を行う装置であれば、いずれにも適用できる。例えば、基板処理装置として、半導体製造装置だけでなくLCD装置のようなガラス基板を処理する装置にも適用できる。さらに処理炉内の処理は、CVDに限定されず、酸化、拡散、アニール等いずれに処理にも適用できる。
【図面の簡単な説明】
【0054】
【図1】実施の形態による基板処理装置のブロック構成図である。
【図2】実施の形態による入出力I/O解析画面である。
【図3】実施の形態による入出力I/O解析画面拡大図である。
【図4】実施の形態による入出力I/O解析画面障害発生時拡大図である。
【図5】実施の形態によるGUIの機能を説明するフローチャートである。
【図6】本発明の基板処理装置を適用した枚葉装置の概要平断面図である。
【図7】本発明の基板処理装置を適用した枚葉装置の概要縦断面図である。
【符号の説明】
【0055】
10 ホストコンピュータ
11 第2の制御手段
12 主制御部(第1の制御手段)
13 サブユニット
11a GUI(Graphical User Interface)
11b ディスプレイ
11c 入力デバイス
【特許請求の範囲】
【請求項1】
装置本体のサブユニットを制御する制御手段であって、該制御手段と前記サブユニットとの間で送受信される第1の通信電文をロギングする第1の制御手段と、
前記第1の制御手段とホストコンピュータとの間に介在される制御手段であって、前記ホストコンピュータ及び前記第1の制御手段との間で送受信される第2の通信電文をロギングする第2の制御手段と
を備えた基板処理装置において、
前記第2の制御手段は、前記第1の制御手段によりロギングされる前記第1の通信電文を受け取ることにより、前記ホストコンピュータ、前記第2の制御手段、前記第1の制御手段、前記サブユニット間の入出力状態を表示可能な表示手段を有することを特徴とする基板処理装置。
【請求項1】
装置本体のサブユニットを制御する制御手段であって、該制御手段と前記サブユニットとの間で送受信される第1の通信電文をロギングする第1の制御手段と、
前記第1の制御手段とホストコンピュータとの間に介在される制御手段であって、前記ホストコンピュータ及び前記第1の制御手段との間で送受信される第2の通信電文をロギングする第2の制御手段と
を備えた基板処理装置において、
前記第2の制御手段は、前記第1の制御手段によりロギングされる前記第1の通信電文を受け取ることにより、前記ホストコンピュータ、前記第2の制御手段、前記第1の制御手段、前記サブユニット間の入出力状態を表示可能な表示手段を有することを特徴とする基板処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−92298(P2006−92298A)
【公開日】平成18年4月6日(2006.4.6)
【国際特許分類】
【出願番号】特願2004−277459(P2004−277459)
【出願日】平成16年9月24日(2004.9.24)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
【公開日】平成18年4月6日(2006.4.6)
【国際特許分類】
【出願日】平成16年9月24日(2004.9.24)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
[ Back to top ]