
基板処理装置
【課題】回転棚のような移動棚の可動範囲の制限をなくし、所定のポッドをより短い距離及び時間で、移動棚の払い出し位置まで移動させることが可能な基板処理装置を提供する。
【解決手段】複数の基板が収容される基板収容器が搬入出されるロードポートと、前記基板収容器を複数収納する移動可能な容器収納棚と、基板を移載する際に基板収容器が載置される移載棚と、前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置を提供する。
【解決手段】複数の基板が収容される基板収容器が搬入出されるロードポートと、前記基板収容器を複数収納する移動可能な容器収納棚と、基板を移載する際に基板収容器が載置される移載棚と、前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウエハ等の基板を処理する基板処理装置、及び該基板処理装置を用いて基板を処理する工程を有する半導体装置の製造方法に関するものである。
【背景技術】
【0002】
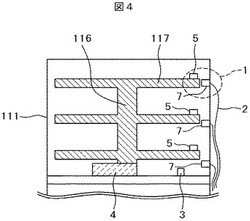
図1に、基板処理装置としての、半導体装置の製造装置(半導体製造装置)の斜視図を示す。図1に示す基板処理装置は、複数のウエハ(基板)を収容する基板収容器であるフープ(以下、ポッドという)110を一時的に保管するエリアである回転可能な回転棚105と、ポッド110を搬送するポッド搬送装置118と、ウエハを積層するように搭載するボート217と、回転棚105に搭載されたポッド110とボート217との間でウエハの移載を行うウエハ移載機125と、ボート217を熱処理炉202内に搬入、及び搬出するボートエレベータ115と、加熱手段(ヒータ)206を備えた熱処理炉202等を備えている。この回転棚105は、回転することで、指定されたポッド110の載置位置を、ポッド搬送装置118との受渡し位置まで移動させることが出来る。
【0003】
従来の回転棚105においては、各棚のポッド載置位置にポッド110の有無を検出するセンサが内蔵されており、ポッド110を棚に載置すると、センサがポッド110の存在を検出する。センサの信号ケーブルは、回転棚105の支柱116(図2参照)の中を通って、コントローラに接続されている。したがって、センサの信号ケーブルがよじれて破断することを防止するため、回転棚105の回転範囲は制限される。例えば、回転棚105が、上から見て左回転のリミット位置で停止している場合、更に例えば90度左回りに回転させることはできない。この場合は、遠回りになるが、右回りに270度回転させる必要がある。これは、回転棚105を左周りに90度回転させた場合と比較して、3倍の距離を移動することになり、基板処理装置のスループットを低下させる要因となる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、従来の基板処理装置の回転棚においては、可動範囲の制限があるという課題があった。
本発明の目的は、回転棚のような移動式の棚の可動範囲の制限をなくし、所定のポッドをより短い距離及び時間で、移動式の棚におけるポッドの払い出し位置、あるいは受け入れ位置まで移動させることが可能な基板処理装置および半導体装置の製造方法を提供することにある。
【課題を解決するための手段】
【0005】
前記課題を解決するための、本発明の代表的な構成は、次のとおりである。
複数の基板が収容される基板収容器が搬入出されるロードポートと、
前記基板収容器を複数収納する移動可能な容器収納棚と、
基板を移載する際に基板収容器が載置される移載棚と、
前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、
前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、
少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、
前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、
前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置。
【発明の効果】
【0006】
上記の基板処理装置によれば、移動可能な容器収納棚の移動制限を抑え、基板処理装置のスループットを向上することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の各実施形態に係る基板処理装置の斜視図である。
【図2】本発明の各実施形態に係る基板処理装置の垂直断面図である。
【図3】本発明の各実施形態に係る基板処理装置の熱処理炉の垂直断面図である。
【図4】本発明の各実施形態に係る回転棚の概略を示す図である。
【図5】本発明の第1の実施形態に係る検出部の垂直断面図である。
【図6】本発明の第2の実施形態に係る検出部の垂直断面図である。
【図7】本発明の第3の実施形態に係る検出部の垂直断面図である。
【発明を実施するための形態】
【0008】
(第1の実施形態)
以下、図面を参照して、本発明の第1の実施形態における基板処理装置を説明する。第1の実施形態において、基板処理装置は、一例として、半導体装置(IC:Integrated Circuit)の製造方法における処理工程を実施する半導体製造装置として構成されている。なお、以下の説明では、基板処理装置として基板に酸化、拡散処理やCVD(Chemical Vapor Deposition)処理などを行うバッチ式縦型半導体製造装置(以下、単に処理装置という)を適用した場合について述べる。図1は、本発明が適用される処理装置の平面透視図であり、斜視図として示されている。また、図2は図1に示す処理装置の側面透視図である。
【0009】
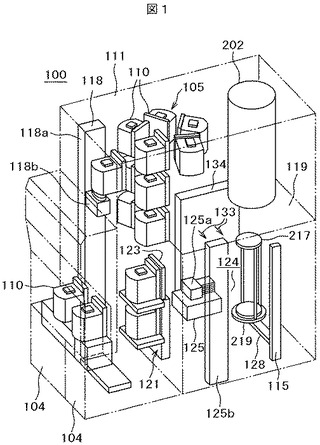
図2に示されているように、シリコン等からなるウエハ(基板)200を収納したウエハキャリアとしてポッド(基板収容器)110が使用されている第1の実施形態の処理装置100は、筐体111を備えている。筐体111の正面壁111aの正面前方部には、メンテナンス可能なように設けられた開口部としての正面メンテナンス口103が開設され、この正面メンテナンス口103を開閉する正面メンテナンス扉104、104がそれぞれ建て付けられている。
筐体111の正面壁111aには、ポッド搬入搬出口(基板収容器搬入搬出口)112が、筐体111の内外を連通するように開設されており、ポッド搬入搬出口112は、フロントシャッタ(基板収容器搬入搬出口開閉機構)113によって開閉されるようになっている。ポッド搬入搬出口112の正面前方側には、ロードポート(基板収容器受渡し台)114が設置されており、ロードポート114は、ポッド110を載置されて位置合わせするように構成されている。ポッド110は、ロードポート114上に工程内搬送装置(図示せず)によって搬入され、かつまた、ロードポート114上から搬出されるようになっている。
【0010】
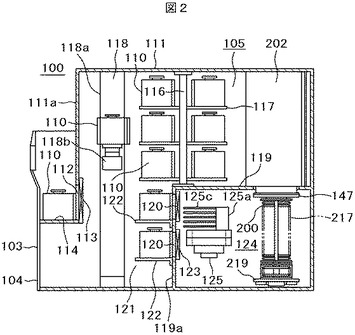
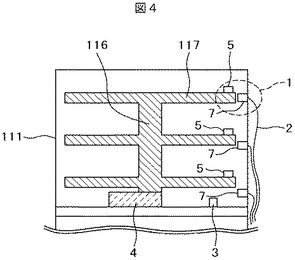
筐体111内の前後方向の略中央部における上部には、回転棚(基板収容器載置棚)105が設置されており、回転棚105は、複数個のポッド110を保管するように構成されている。図4に、回転棚105の概略図を示す。すなわち、回転棚105は、垂直に立設されて水平面内で間欠回転される支柱116と、支柱116に上下3段の各位置において放射状に支持された複数枚(この例では3枚)の棚板(基板収容器載置台)117と、棚板117にポッドが載置されたことを示す機構(以下、センサフラグ)5を備えており、複数枚の棚板117は、ポッド110を複数個(図1の例では5個)それぞれ載置した状態で保持するように構成されている。センサフラグ5は、棚板117上の各ポッド110の載置位置に1対1で対応するように設けられており、図1の例では、1つの棚板117に5つ設けられている。センサフラグ5は、ポッド110が棚板117上に載置されると、変位するようになっている。
また、回転棚105の周囲、近傍には、筐体111に固定されたセンサ7が、棚板117の段数に応じて設置されており、センサフラグ5の変位を検出する。センサ7は、ポッド搬送装置118が回転棚105との間で、ポッド110を受渡しする位置におけるセンサフラグ5の動作を検出可能な位置に設置するのが好ましい。この場合、センサ7は、各棚板117に対し、少なくとも1つあればよい。もちろん、センサ7は、全てのセンサフラグ5に1対1で対応させて設けることもできる。
【0011】
図2に示すように、筐体111内におけるロードポート114と回転棚105との間には、ポッド搬送装置(基板収容器搬送装置)118が設置されている。ポッド搬送装置118は、ポッド110を保持したまま昇降可能なポッドエレベータ(基板収容器昇降機構)118aと、水平搬送機構としてのポッド搬送機構(基板収容器搬送機構)118bとで構成されており、ポッド搬送装置118は、ポッドエレベータ118aとポッド搬送機構118bとの連続動作により、ロードポート114、回転棚105、ポッドオープナ(基板収容器蓋体開閉機構)121との間で、ポッド110を搬送するように構成されている。
【0012】
図2に示すように、筐体111内の前後方向の略中央部における下部には、サブ筐体119が後端にわたって構築されている。サブ筐体119の正面壁119aには、ウエハ200をサブ筐体119内に対して搬入搬出するためのウエハ搬入搬出口(基板搬入搬出口)120が1対、垂直方向に上下2段に並べられて開設されており、上下段のウエハ搬入搬出口120、120には1対のポッドオープナ121、121がそれぞれ設置されている。
ポッドオープナ121は、ポッド110を載置する載置台122、122と、ポッド110のキャップ(蓋体)を着脱するキャップ着脱機構(蓋体着脱機構)123、123とを備えている。ポッドオープナ121は、載置台122に載置されたポッド110のキャップをキャップ着脱機構123によって着脱することにより、ポッド110のウエハ出し入れ口を開閉するように構成されている。載置台122は、基板を移載する際に基板収容器が載置される移載棚である。
【0013】
図2に示すように、サブ筐体119は、ポッド搬送装置118や回転棚105の設置空間の雰囲気と隔絶された移載室124を構成している。移載室124の前側領域には、ウエハ移載機構(基板移載機構)125が設置されている。ウエハ移載機構125は、ウエハ200を水平方向に回転ないし直動可能なウエハ移載装置(基板移載装置)125a、およびウエハ移載装置125aを昇降させるためのウエハ移載装置エレベータ(基板移載装置昇降機構)125bとで構成されている。これら、ウエハ移載装置エレベータ125bおよびウエハ移載装置125aの連続動作により、ウエハ移載装置125aのツイーザ(基板保持体)125cをウエハ200の載置部として、ボート(基板保持具)217に対して、ウエハ200を装填(チャージング)および脱装(ディスチャージング)するように構成されている。
【0014】
図1に示されているように、移載室124のウエハ移載装置エレベータ125b側と反対側である左側端部には、清浄化した雰囲気もしくは不活性ガスであるクリーンエア133を供給するよう、供給フアンおよび防塵フィルタで構成されたクリーンユニット134が設置されており、ウエハ移載装置125aとクリーンユニット134との間には、ウエハの円周方向の位置を整合させる基板整合装置としてのノッチ合わせ装置135(不図示)が設置されている。
クリーンユニット134から吹き出されたクリーンエア133は、ノッチ合わせ装置135およびウエハ移載装置125aに流通された後に、図示しないダクトにより吸い込まれて、筐体111の外部に排気がなされるか、もしくはクリーンユニット134の吸い込み側である一次側(供給側)にまで循環され、再びクリーンユニット134によって、移載室124内に吹き出されるように構成されている。
【0015】
移載室124の後側領域には、大気圧未満の圧力(以下、負圧という。)を維持可能な機密性能を有する筐体(以下、耐圧筐体という。)140(不図示)が設置されており、この耐圧筐体140により、ボート217を収容可能な容積を有するロードロック方式の待機室であるロードロック室141(不図示)が形成されている。
耐圧筐体140の正面壁140a(不図示)には、ウエハ搬入搬出開口(基板搬入搬出開口)142(不図示)が開設されており、ウエハ搬入搬出開口142は、ゲートバルブ(基板搬入搬出口開閉機構)143(不図示)によって開閉されるようになっている。耐圧筐体140の1対の側壁には、ロードロック室141へ窒素ガスを給気するためのガス供給管144(不図示)と、ロードロック室141を負圧に排気するための排気管145(不図示)とが、それぞれ接続されている。
図2に示すように、ロードロック室141の上方には、処理炉202が設けられている。処理炉202の下端部は、炉口ゲートバルブ(炉口開閉機構)147により開閉されるように構成されている。耐圧筐体140の正面壁140aの上端部には、炉口ゲートバルブ147を処理炉202の下端部の開放時に収容する炉口ゲートバルブカバー149(不図示)が取り付けられている。
【0016】
図1に示されているように、耐圧筐体140内には、ボート217を昇降させるためのボートエレベータ(基板保持具昇降機構)115が設置されている。ボートエレベータ115に連結された連結具としてのアーム128には、蓋体としてのシールキャップ219が水平に据え付けられており、シールキャップ219は、ボート217を垂直に支持し、処理炉202の下端部を閉塞可能なように構成されている。
ボート217は、複数本の保持部材を備えており、複数枚(例えば、50枚〜125枚程度)のウエハ200を、その中心を揃えて垂直方向に整列させた状態で、それぞれ水平に保持するように構成されている。
【0017】
次に、本発明の処理装置の動作について説明する。
図1、図2に示されているように、ポッド110がロードポート114に供給されると、ポッド搬入搬出口112がフロントシャッタ113によって開放され、ロード、ポッド搬入搬出口112から搬入される。
搬入されたポッド110は、回転棚105の指定された棚板117へ、ポッド搬送装置118によって、自動的に搬送されて受け渡される。回転棚105では、受取ったポッド110がセンサフラグ5を押し動かし、変位させる。センサフラグ5の変位を、回転棚105の周囲に固定して設けられたセンサ7が検出する。このセンサ7の検出により、処理装置100は、回転棚105にポッド110が正しく受け渡されたと判断する。ポッド搬送装置118が回転棚105からポッドを回収する際も、概上述の逆の手順でポッド110が正しく受け渡されたと判断する。
【0018】
ポッド110は回転棚105で一時的に保管された後、棚板117から一方のポッドオープナ121に搬送されて載置台122に移載されるか、もしくは、ロードポート114から直接、ポッドオープナ121に搬送されて、載置台122に移載される。この際、ポッドオープナ121のウエハ搬入搬出口120は、キャップ着脱機構123によって閉じられており、移載室124にはクリーンエア133が流通され、充満されている。例えば、移載室124には、クリーンエア133として窒素ガスが充満することにより、酸素濃度が20ppm以下になるよう、筐体111の内部(大気雰囲気)の酸素濃度よりも遥かに低く設定されている。
【0019】
図2に示すように、載置台122に載置されたポッド110は、その開口側端面が、サブ筐体119の正面壁119aにおけるウエハ搬入搬出口120の開口縁辺部に押し付けられるとともに、そのキャップが、キャップ着脱機構123によって取り外され、ポッド110のウエハ出し入れ口が開放される。また、予め内部が大気圧状態とされていたロードロック室141のウエハ搬入搬出開口142が、ゲートバルブ143の動作により開放されると、ウエハ200は、ポッド110からウエハ移載装置125aのツイーザ125cによって、ウエハ出し入れ口を通じてピックアップされ、ノッチ合わせ装置135にてウエハを整合した後、ウエハ搬入搬出開口142を通じてロードロック室141に搬入され、ボート217へ移載されて装填(ウエハチャージング)される。ボート217にウエハ200を受け渡したウエハ移載装置125aは、ポッド110に戻り、次のウエハ110をボート217に装填する。
【0020】
この一方(上段または下段)のポッドオープナ121におけるウエハ移載装置125によるウエハ200のボート217への装填作業中に、他方(下段または上段)のポッドオープナ121には、回転棚105ないしロードポート114から別のポッド110がポッド搬送装置118によって搬送され、ポッドオープナ121によるポッド110の開放作業が同時進行される。
【0021】
予め指定された枚数のウエハ200がボート217に装填されると、ウエハ搬入搬出開口142がゲートバルブ143によって閉じられ、ロードロック室141は排気管145から真空引きされることにより、減圧される。
ロードロック室141が処理炉202内の圧力と同圧に減圧されると、処理炉202の下端部が炉口ゲートバルブ147によって開放される。このとき、炉口ゲートバルブ147は炉口ゲートバルブカバー149の内部に搬入されて収容される。
続いて、シールキャップ219がボートエレベータ115によって上昇されて、シールキャップ219に支持されたボート217が、処理炉202内へ搬入(ローディング)されて行く。
【0022】
ローディング後は、処理炉202にてウエハ200に任意の処理が実施される。処理後は、ボートエレベータ115によりボート217が引き出され、更に、ロードロック室140内部を大気圧に復圧させた後にゲートバルブ143が開かれる。その後は、ノッチ合わせ装置135でのウエハの整合工程を除き、概上述の逆の手順で、ウエハ200およびポッド110は筐体111の外部へ払出される。
【0023】
以下に、本発明の各実施形態に係る処理炉202を、図3を用いて説明する。図3は、本発明の各実施形態で好適に用いられる基板処理装置の処理炉202の概略構成図であり、縦断面図として示されている。
http://sgpat2.head.hitachi.co.jp/pat_www/fpic?AA04304128/000003.gif図3に示されているように、処理炉202は、加熱機構としてのヒータ206を有する。ヒータ206は円筒形状であり、保持板としてのヒータベース251に支持されることにより垂直に据え付けられている。
【0024】
ヒータ206の内側には、ヒータ206と同心円状に反応管としてのプロセスチューブ203が配設されている。プロセスチューブ203は、内部反応管としてのインナーチューブ204と、その外側に設けられた外部反応管としてのアウターチューブ205とから構成されている。インナーチューブ204は、例えば石英(SiO2 )または炭化シリコン(SiC)等の耐熱性材料からなり、上端および下端が開口した円筒形状に形成されている。インナーチューブ204の筒中空部には、処理室201が形成されており、基板としてのウエハ200を、後述するボート217によって、水平姿勢で垂直方向に多段に整列した状態で収容可能に構成されている。アウターチューブ205は、例えば石英または炭化シリコン等の耐熱性材料からなり、内径がインナーチューブ204の外径よりも大きく、上端が閉塞し下端が開口した円筒形状に形成されており、インナーチューブ204と同心円状に設けられている。
【0025】
アウターチューブ205の下方には、アウターチューブ205と同心円状に、マニホールド209が配設されている。マニホールド209は、例えばステンレス等からなり、上端および下端が開口した円筒形状に形成されている。マニホールド209は、インナーチューブ204とアウターチューブ205に係合しており、これらを支持するように設けられている。なお、マニホールド209とアウターチューブ205との間には、シール部材としてのOリング220aが設けられている。マニホールド209がヒータベース251に支持されることにより、プロセスチューブ203は垂直に据え付けられた状態となっている。プロセスチューブ203とマニホールド209により、反応容器が形成される。
【0026】
後述するシールキャップ219には、ガス導入部としてのノズル230が、処理室201内に連通するように接続されており、ノズル230には、ガス供給管232が接続されている。ガス供給管232のノズル230との接続側と反対側である上流側には、ガス流量制御器としてのMFC(マスフローコントローラ)241を介して、図示しない処理ガス供給源や不活性ガス供給源が接続されている。MFC241には、ガス流量制御部235が電気的に接続されており、供給するガスの流量が所望の量となるよう所望のタイミングにて制御するように構成されている。
【0027】
マニホールド209には、処理室201内の雰囲気を排気する排気管231が設けられている。排気管231は、インナーチューブ204とアウターチューブ205との隙間によって形成される筒状空間250の下端部に配置されており、筒状空間250に連通している。排気管231のマニホールド209との接続側と反対側である下流側には、圧力検出器としての圧力センサ245および圧力調整装置242を介して、真空ポンプ等の真空排気装置246が接続されており、処理室201内の圧力が所定の圧力(真空度)となるよう、真空排気し得るように構成されている。圧力調整装置242および圧力センサ245には、圧力制御部236が電気的に接続されており、圧力制御部236は、圧力センサ245により検出された圧力に基づいて、圧力調整装置242により、処理室201内の圧力が所望の圧力となるよう所望のタイミングにて制御するように構成されている。
【0028】
マニホールド209の下方には、マニホールド209の下端開口を気密に閉塞可能な、炉口蓋体としてのシールキャップ219が設けられている。シールキャップ219は、マニホールド209の下端に、垂直方向下側から当接されるようになっている。シールキャップ219は、例えばステンレス等の金属からなり、円盤状に形成されている。シールキャップ219の上面には、マニホールド209の下端と当接するシール部材としてのOリング220bが設けられる。シールキャップ219の処理室201と反対側には、ボートを回転させる回転機構254が設置されている。回転機構254の回転軸255は、シールキャップ219を貫通して、後述するボート217に接続されており、ボート217を回転させることでウエハ200を回転させるように構成されている。シールキャップ219は、プロセスチューブ203の外部に垂直に設備された昇降機構としてのボートエレベータ115によって、垂直方向に昇降されるように構成されており、これによりボート217を、処理室201に対し搬入搬出することが可能となっている。回転機構254及びボートエレベータ115には、駆動制御部237が電気的に接続されており、所望の動作をするよう所望のタイミングにて制御するように構成されている。
【0029】
基板保持具としてのボート217は、例えば石英や炭化珪素等の耐熱性材料からなり、複数枚のウエハ200を、水平姿勢でかつ互いに中心を揃えた状態で整列させて多段に保持するように構成されている。なお、ボート217の下部には、例えば石英や炭化珪素等の耐熱性材料からなる円板形状をした断熱部材としての断熱板216が、水平姿勢で多段に複数枚配置されており、ヒータ206からの熱がマニホールド209側に伝わりにくくなるよう構成されている。
【0030】
プロセスチューブ203内には、温度検出器としての温度センサ263が設置されている。ヒータ206と温度センサ263には、電気的に温度制御部238が接続されており、温度センサ263により検出された温度情報に基づき、ヒータ206への通電具合を調整することにより、処理室201内の温度が所望の温度分布となるよう所望のタイミングにて制御するように構成されている。
【0031】
ガス流量制御部235、圧力制御部236、駆動制御部237、温度制御部238は、図示しない操作部、入出力部とともに、基板処理装置全体を制御する主制御部239に電気的に接続されている。これら、ガス流量制御部235、圧力制御部236、駆動制御部237、温度制御部238、主制御部239は、コントローラ240として構成されている。
【0032】
次に、上記構成に係る処理炉202を用いて、半導体デバイスの製造工程の一工程として、CVD法によりウエハ200上に薄膜を形成する方法について説明する。尚、以下の説明において、基板処理装置を構成する各部の動作はコントローラ240により制御される。
【0033】
複数枚のウエハ200がボート217に装填(ウエハチャージ)されると、図3に示されているように、複数枚のウエハ200を保持したボート217は、ボートエレベータ115によって持ち上げられて、処理室201に搬入(ボートローディング)される。この状態で、シールキャップ219は、Oリング220bを介して、マニホールド209の下端をシールした状態となる。
【0034】
処理室201内が所望の圧力(真空度)となるように、真空排気装置246によって真空排気される。この際、処理室201内の圧力は、圧力センサ245で測定され、この測定された圧力に基づき圧力調節器242が、フィードバック制御される。また、処理室201内が所望の温度となるように、ヒータ206によって加熱される。この際、処理室201内が所望の温度分布となるように、温度センサ263が検出した温度情報に基づき、ヒータ206への通電具合がフィードバック制御される。続いて、回転機構254により、ボート217が回転されることで、ウエハ200が回転される。
【0035】
次いで、処理ガス供給源から供給され、MFC241にて所望の流量となるように制御されたガスは、ガス供給管232を流通してノズル230から、処理室201内に導入される。導入されたガスは、処理室201内を上昇し、インナーチューブ204の上端開口から筒状空間250に流出して、排気管231から排気される。ガスは、処理室201内を通過する際にウエハ200の表面と接触し、この際に熱CVD反応によってウエハ200の表面上に、薄膜が堆積(デポジション)される。
【0036】
予め設定された処理時間が経過すると、不活性ガス供給源から不活性ガスが供給され、処理室201内が不活性ガスに置換されるとともに、処理室201内の圧力が常圧に復帰される。
【0037】
その後、ボートエレベータ115によりシールキャップ219が下降されて、マニホールド209の下端が開口されるとともに、処理済ウエハ200がボート217に保持された状態で、マニホールド209の下端から、プロセスチューブ203の外部に搬出(ボートアンローディング)される。その後、処理済ウエハ200は、ボート217より取出される(ウエハディスチャージ)。
【0038】
なお、一例を示すと、本実施の形態の処理炉にてウエハを処理する際の処理条件としては、例えば、酸化膜の成膜においては、処理温度(150〜1050)℃、処理圧力(0〜101300)Pa、ガス種(H2O)、ガス供給流量(20)sccmが例示され、それぞれの処理条件を、それぞれの範囲内のある値で一定に維持することでウエハに処理がなされる。
【0039】
次に、第1の実施形態における、回転棚105の検出部1について、図4、図5を用いて説明する。図4は、本発明の各実施形態に係る回転棚の概略を示す図である。図5は、本発明の第1の実施形態に係る検出部の垂直断面図である。図4に示すように、3段の各棚板117が、駆動ユニット4により、支柱116を中心にして回転可能なようになっている。各棚板117には、センサフラグ5が、ポッド110の載置位置に対応して設けられている。例えば、各棚板117に5つのポッド110が載置可能な場合は、センサフラグ5は、各棚板117に5つ設けられる。
また、センサフラグ5に対向するように、センサ7が筐体111に固定して取り付けられている。センサ7は、ポッド搬送装置118が回転棚105との間で、ポッド110を受渡しする位置におけるセンサフラグ5の動作を検出可能な位置に設置する。したがって、センサ7は、各棚板117に対し、少なくとも1つあればよい。もちろん、センサ7は、全てのセンサフラグ5に1対1で対応させて設けることもできる。センサ7の設置方法は、筐体111に直接固定するか、ステー(部材)を介して筐体111に固定する。各センサ7には、信号ケーブル2が接続されている。検出部1は、筐体111と棚板117、センサフラグ5、スプリング6、センサ7で構成されている。
3は、回転棚105の回転位置(角度)が基準位置にあることを検出する基準位置センサである。基準位置センサ3は固定されており、例えば、基準位置センサ3を発光部と受光部とを有する光センサで構成し、棚板117の裏側の所定位置に反射体を設けることで、回転棚105の回転位置が基準位置にあることを検出できる。
【0040】
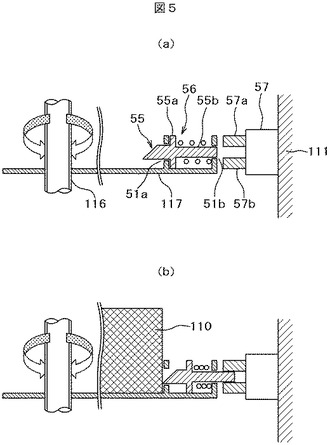
第1の実施形態においては、図5に示すように、センサフラグ55は、棚板117にスプリング56と共に取り付けられており、棚板117に対し水平方向に動作、変位する。スプリング56は、センサフラグ55と棚板117の間に常に力(例えば、プリロード)を加えており、センサフラグ55に外力が働かない場合、常に決められた位置で保持する働きをする。つまり、スプリング56は、図5(a)に示すように、センサフラグ55に対し、常に支柱116方向の力を加えている。棚板117にポッド110が載せられると図5(b)に示すように、ポッド110の重さでセンサフラグ5が水平方向に押し動かされ、センサ57がこの動きを検出する。
センサ57は、筐体111に直接もしくはステー等を介して固定されている。固定する位置は、センサフラグ5のフラグの動作を検出可能な位置に設定する。回転棚105の駆動ユニット4には、アブソリュート式エンコーダ及び基準点を検出するフラグを内蔵し、回転棚の絶対位置をリアルタイムで検出可能にする。
【0041】
図5に示すように、第1の実施形態ではセンサフラグ55が水平方向に動作する構造を有している。センサフラグ55には、支軸55bが設けられており、棚板117には支軸孔51a、51bが設けられている。センサフラグ55にポッド110が接触した際や、接触していたポッド110が移動した場合は、支軸孔51aと51bを結ぶ直線に沿って、センサフラグ55が水平にスライドする。センサフラグ55には鍔部55aが設けられており、鍔部55aと支軸孔51bの間にスプリング56を挿入することで、センサフラグ55にポッド110が接触していない状態では、図5(a)に示すように、常に同じ位置で待機可能にする。
センサ57の向きは、図5(a)に示すように、例えば光センサの場合は、発光部57aと受光部57bを結ぶ光軸が、回転棚105の回転軸と平行になるようにし、回転棚105が回転動作しても、棚板117やセンサフラグ55とセンサ57が干渉しないようにする。センサ57の設置個数は、棚板117の数に比例し、各棚板117に少なくとも1個設置する。
この様な形状を採用することにより、センサフラグ55が棚板117の上面及び下面より垂直方向に大きく突出することがないので、搬送中のポッド110がセンサフラグ55と接触するというトラブルを防止し易い。また、センサフラグ55が棚板117の上面及び下面より、垂直方向に変位しないので、棚板117間のクリアランスを最小限に抑えることが可能になり、回転棚105自体の高さを抑えることも可能である。
【0042】
(第2の実施形態)
次に、回転棚105の検出部1の第2の実施形態について、図6を用いて説明する。図6は、第2の実施形態に係る検出部1の垂直断面図である。検出部1の構成以外は、第1の実施形態の場合と同様である。検出部1の構成は、第1の実施形態と同様に、筐体111と棚板117、センサフラグ65、スプリング66、センサ67となっている。
センサフラグ65は、棚板117にスプリング66と共に取り付けられており、棚板117に対し鉛直方向に動作、変位する。スプリング66は、センサフラグ65と棚板117の間に常に力(例えば、プリロード)を加えており、センサフラグ65に外力が働かない場合、図6(a)に示すように、常に決められた位置で保持する働きをする。棚板117にポッド110が載せられると、図6(b)に示すように、ポッド110の重さでセンサフラグ65が押し動かされ、センサ67がこの動きを検出する。
図6(a)に示すように、棚板117にポッド110が載置されていない場合は、センサフラグ65が上記決められた位置にあるため、センサ67が例えば光センサの場合は、光を検出する。図6(b)に示すように、棚板117にポッド110が受け渡されると、センサフラグ65が垂直方向下方に変位し、センサ67が光を検出しなくなることで、ポッド110が棚板117へ正常に受け渡されたと判断する。
【0043】
(第3の実施形態)
次に、回転棚105の検出部1の第3の実施形態について、図7を用いて説明する。図7は、第3の実施形態に係る検出部1の垂直断面図である。検出部1の構成以外は、第1の実施形態の場合と同様である。検出部1は、筐体111と棚板117、センサフラグ75、スプリング76、発信部78、センサ77で構成されている。
ポッド110が棚板117の所定の位置に載置されると、センサフラグ75が動き、発信部78から発せられている信号(例えば赤外線)を、センサ77へ誘導(例えば反射)することで、センサ77がセンサフラグ75の動きを検出する。このセンサ77の検出により、ポッド110が棚板117に載置されたと判断する。
図7の例では、センサフラグ75に反射板75cを持たせる。発信部78は、受渡し部の下もしくは上付近に設置し、例えば発信部78から光を発する場合、光軸79が回転棚105の軸と平行になるよう固定する。
図7(a)に示すように、棚板117にポッド110が載置されていない場合は、センサフラグ75が発信部78からの光79を反射しないため、センサ77は光を検出しない。図7(b)に示すように、棚板117にポッド110が受け渡されると、センサフラグ75が水平方向に変位し、発信部78からの光を反射し、センサ77が反射光を検出することで、ポッド110が棚板117へ正常に受け渡されたと判断する。
【0044】
従来の回転棚を製作する場合は、(1)機械加工のスキル、(2)機械組立のスキル、(3)ケーブル製作のスキル、(4)ケーブル配線・養生のスキルが必要であったが、上述した実施形態によれば、(3)ケーブル製作のスキル、(4)ケーブル配線・養生のスキルが不要となる。したがって、純粋な機械加工のみで製作することが可能になり、回転棚の生産性が向上する。
【0045】
なお、本発明は、前記各実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々に変更が可能であることはいうまでもない。
また、前記各実施形態ではセンサを光センサで説明したが、機械式接点センサや静電センサを用いることもできる。
【0046】
上述したように、本発明の一態様によれば、第1の発明として、
複数の基板が収容される基板収容器が搬入出されるロードポートと、
前記基板収容器を複数収納する移動可能な容器収納棚と、
基板を移載する際に基板収容器が載置される移載棚と、
前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、
前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、
少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、
前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、
前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置が提供される。
このようにすると、移動可能な容器収納棚の移動制限を抑え、基板処理装置のスループットを向上することができる。
【0047】
好ましくは第2の発明として、前記第1の発明の基板処理装置であって、
前記基板収容器検出センサの取付位置を、ポッドをポッド搬送装置から回転棚へ受け渡す位置とすることを特徴とする基板処理装置が提供される。
このようにすると、各回転棚に設ける基板収容器検出センサが1つで済む。
【符号の説明】
【0048】
1…検出部、2…信号ケーブル、3…基準位置センサ、4…駆動ユニット、5…センサフラグ、6…スプリング、7…センサ、51a…支軸孔、51b…支軸孔、55…センサフラグ、55a…鍔部、55b…支軸、56…スプリング、57…センサ、57a…発光部、57b…受光部、65…センサフラグ、66…スプリング、67…センサ、67a…発光部、67b…受光部、75…センサフラグ、75c…反射板、76…スプリング、77…センサ、78…発信部、79…光軸、100…コントローラ、105…回転棚、110…ポッド、111…筐体、115…ボートエレベータ、116…支柱、117…棚板、118…ポッド搬送装置、125…基板移載機構、200…ウエハ、202…熱処理炉、217…ボート。
【技術分野】
【0001】
本発明は、半導体ウエハ等の基板を処理する基板処理装置、及び該基板処理装置を用いて基板を処理する工程を有する半導体装置の製造方法に関するものである。
【背景技術】
【0002】
図1に、基板処理装置としての、半導体装置の製造装置(半導体製造装置)の斜視図を示す。図1に示す基板処理装置は、複数のウエハ(基板)を収容する基板収容器であるフープ(以下、ポッドという)110を一時的に保管するエリアである回転可能な回転棚105と、ポッド110を搬送するポッド搬送装置118と、ウエハを積層するように搭載するボート217と、回転棚105に搭載されたポッド110とボート217との間でウエハの移載を行うウエハ移載機125と、ボート217を熱処理炉202内に搬入、及び搬出するボートエレベータ115と、加熱手段(ヒータ)206を備えた熱処理炉202等を備えている。この回転棚105は、回転することで、指定されたポッド110の載置位置を、ポッド搬送装置118との受渡し位置まで移動させることが出来る。
【0003】
従来の回転棚105においては、各棚のポッド載置位置にポッド110の有無を検出するセンサが内蔵されており、ポッド110を棚に載置すると、センサがポッド110の存在を検出する。センサの信号ケーブルは、回転棚105の支柱116(図2参照)の中を通って、コントローラに接続されている。したがって、センサの信号ケーブルがよじれて破断することを防止するため、回転棚105の回転範囲は制限される。例えば、回転棚105が、上から見て左回転のリミット位置で停止している場合、更に例えば90度左回りに回転させることはできない。この場合は、遠回りになるが、右回りに270度回転させる必要がある。これは、回転棚105を左周りに90度回転させた場合と比較して、3倍の距離を移動することになり、基板処理装置のスループットを低下させる要因となる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、従来の基板処理装置の回転棚においては、可動範囲の制限があるという課題があった。
本発明の目的は、回転棚のような移動式の棚の可動範囲の制限をなくし、所定のポッドをより短い距離及び時間で、移動式の棚におけるポッドの払い出し位置、あるいは受け入れ位置まで移動させることが可能な基板処理装置および半導体装置の製造方法を提供することにある。
【課題を解決するための手段】
【0005】
前記課題を解決するための、本発明の代表的な構成は、次のとおりである。
複数の基板が収容される基板収容器が搬入出されるロードポートと、
前記基板収容器を複数収納する移動可能な容器収納棚と、
基板を移載する際に基板収容器が載置される移載棚と、
前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、
前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、
少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、
前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、
前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置。
【発明の効果】
【0006】
上記の基板処理装置によれば、移動可能な容器収納棚の移動制限を抑え、基板処理装置のスループットを向上することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の各実施形態に係る基板処理装置の斜視図である。
【図2】本発明の各実施形態に係る基板処理装置の垂直断面図である。
【図3】本発明の各実施形態に係る基板処理装置の熱処理炉の垂直断面図である。
【図4】本発明の各実施形態に係る回転棚の概略を示す図である。
【図5】本発明の第1の実施形態に係る検出部の垂直断面図である。
【図6】本発明の第2の実施形態に係る検出部の垂直断面図である。
【図7】本発明の第3の実施形態に係る検出部の垂直断面図である。
【発明を実施するための形態】
【0008】
(第1の実施形態)
以下、図面を参照して、本発明の第1の実施形態における基板処理装置を説明する。第1の実施形態において、基板処理装置は、一例として、半導体装置(IC:Integrated Circuit)の製造方法における処理工程を実施する半導体製造装置として構成されている。なお、以下の説明では、基板処理装置として基板に酸化、拡散処理やCVD(Chemical Vapor Deposition)処理などを行うバッチ式縦型半導体製造装置(以下、単に処理装置という)を適用した場合について述べる。図1は、本発明が適用される処理装置の平面透視図であり、斜視図として示されている。また、図2は図1に示す処理装置の側面透視図である。
【0009】
図2に示されているように、シリコン等からなるウエハ(基板)200を収納したウエハキャリアとしてポッド(基板収容器)110が使用されている第1の実施形態の処理装置100は、筐体111を備えている。筐体111の正面壁111aの正面前方部には、メンテナンス可能なように設けられた開口部としての正面メンテナンス口103が開設され、この正面メンテナンス口103を開閉する正面メンテナンス扉104、104がそれぞれ建て付けられている。
筐体111の正面壁111aには、ポッド搬入搬出口(基板収容器搬入搬出口)112が、筐体111の内外を連通するように開設されており、ポッド搬入搬出口112は、フロントシャッタ(基板収容器搬入搬出口開閉機構)113によって開閉されるようになっている。ポッド搬入搬出口112の正面前方側には、ロードポート(基板収容器受渡し台)114が設置されており、ロードポート114は、ポッド110を載置されて位置合わせするように構成されている。ポッド110は、ロードポート114上に工程内搬送装置(図示せず)によって搬入され、かつまた、ロードポート114上から搬出されるようになっている。
【0010】
筐体111内の前後方向の略中央部における上部には、回転棚(基板収容器載置棚)105が設置されており、回転棚105は、複数個のポッド110を保管するように構成されている。図4に、回転棚105の概略図を示す。すなわち、回転棚105は、垂直に立設されて水平面内で間欠回転される支柱116と、支柱116に上下3段の各位置において放射状に支持された複数枚(この例では3枚)の棚板(基板収容器載置台)117と、棚板117にポッドが載置されたことを示す機構(以下、センサフラグ)5を備えており、複数枚の棚板117は、ポッド110を複数個(図1の例では5個)それぞれ載置した状態で保持するように構成されている。センサフラグ5は、棚板117上の各ポッド110の載置位置に1対1で対応するように設けられており、図1の例では、1つの棚板117に5つ設けられている。センサフラグ5は、ポッド110が棚板117上に載置されると、変位するようになっている。
また、回転棚105の周囲、近傍には、筐体111に固定されたセンサ7が、棚板117の段数に応じて設置されており、センサフラグ5の変位を検出する。センサ7は、ポッド搬送装置118が回転棚105との間で、ポッド110を受渡しする位置におけるセンサフラグ5の動作を検出可能な位置に設置するのが好ましい。この場合、センサ7は、各棚板117に対し、少なくとも1つあればよい。もちろん、センサ7は、全てのセンサフラグ5に1対1で対応させて設けることもできる。
【0011】
図2に示すように、筐体111内におけるロードポート114と回転棚105との間には、ポッド搬送装置(基板収容器搬送装置)118が設置されている。ポッド搬送装置118は、ポッド110を保持したまま昇降可能なポッドエレベータ(基板収容器昇降機構)118aと、水平搬送機構としてのポッド搬送機構(基板収容器搬送機構)118bとで構成されており、ポッド搬送装置118は、ポッドエレベータ118aとポッド搬送機構118bとの連続動作により、ロードポート114、回転棚105、ポッドオープナ(基板収容器蓋体開閉機構)121との間で、ポッド110を搬送するように構成されている。
【0012】
図2に示すように、筐体111内の前後方向の略中央部における下部には、サブ筐体119が後端にわたって構築されている。サブ筐体119の正面壁119aには、ウエハ200をサブ筐体119内に対して搬入搬出するためのウエハ搬入搬出口(基板搬入搬出口)120が1対、垂直方向に上下2段に並べられて開設されており、上下段のウエハ搬入搬出口120、120には1対のポッドオープナ121、121がそれぞれ設置されている。
ポッドオープナ121は、ポッド110を載置する載置台122、122と、ポッド110のキャップ(蓋体)を着脱するキャップ着脱機構(蓋体着脱機構)123、123とを備えている。ポッドオープナ121は、載置台122に載置されたポッド110のキャップをキャップ着脱機構123によって着脱することにより、ポッド110のウエハ出し入れ口を開閉するように構成されている。載置台122は、基板を移載する際に基板収容器が載置される移載棚である。
【0013】
図2に示すように、サブ筐体119は、ポッド搬送装置118や回転棚105の設置空間の雰囲気と隔絶された移載室124を構成している。移載室124の前側領域には、ウエハ移載機構(基板移載機構)125が設置されている。ウエハ移載機構125は、ウエハ200を水平方向に回転ないし直動可能なウエハ移載装置(基板移載装置)125a、およびウエハ移載装置125aを昇降させるためのウエハ移載装置エレベータ(基板移載装置昇降機構)125bとで構成されている。これら、ウエハ移載装置エレベータ125bおよびウエハ移載装置125aの連続動作により、ウエハ移載装置125aのツイーザ(基板保持体)125cをウエハ200の載置部として、ボート(基板保持具)217に対して、ウエハ200を装填(チャージング)および脱装(ディスチャージング)するように構成されている。
【0014】
図1に示されているように、移載室124のウエハ移載装置エレベータ125b側と反対側である左側端部には、清浄化した雰囲気もしくは不活性ガスであるクリーンエア133を供給するよう、供給フアンおよび防塵フィルタで構成されたクリーンユニット134が設置されており、ウエハ移載装置125aとクリーンユニット134との間には、ウエハの円周方向の位置を整合させる基板整合装置としてのノッチ合わせ装置135(不図示)が設置されている。
クリーンユニット134から吹き出されたクリーンエア133は、ノッチ合わせ装置135およびウエハ移載装置125aに流通された後に、図示しないダクトにより吸い込まれて、筐体111の外部に排気がなされるか、もしくはクリーンユニット134の吸い込み側である一次側(供給側)にまで循環され、再びクリーンユニット134によって、移載室124内に吹き出されるように構成されている。
【0015】
移載室124の後側領域には、大気圧未満の圧力(以下、負圧という。)を維持可能な機密性能を有する筐体(以下、耐圧筐体という。)140(不図示)が設置されており、この耐圧筐体140により、ボート217を収容可能な容積を有するロードロック方式の待機室であるロードロック室141(不図示)が形成されている。
耐圧筐体140の正面壁140a(不図示)には、ウエハ搬入搬出開口(基板搬入搬出開口)142(不図示)が開設されており、ウエハ搬入搬出開口142は、ゲートバルブ(基板搬入搬出口開閉機構)143(不図示)によって開閉されるようになっている。耐圧筐体140の1対の側壁には、ロードロック室141へ窒素ガスを給気するためのガス供給管144(不図示)と、ロードロック室141を負圧に排気するための排気管145(不図示)とが、それぞれ接続されている。
図2に示すように、ロードロック室141の上方には、処理炉202が設けられている。処理炉202の下端部は、炉口ゲートバルブ(炉口開閉機構)147により開閉されるように構成されている。耐圧筐体140の正面壁140aの上端部には、炉口ゲートバルブ147を処理炉202の下端部の開放時に収容する炉口ゲートバルブカバー149(不図示)が取り付けられている。
【0016】
図1に示されているように、耐圧筐体140内には、ボート217を昇降させるためのボートエレベータ(基板保持具昇降機構)115が設置されている。ボートエレベータ115に連結された連結具としてのアーム128には、蓋体としてのシールキャップ219が水平に据え付けられており、シールキャップ219は、ボート217を垂直に支持し、処理炉202の下端部を閉塞可能なように構成されている。
ボート217は、複数本の保持部材を備えており、複数枚(例えば、50枚〜125枚程度)のウエハ200を、その中心を揃えて垂直方向に整列させた状態で、それぞれ水平に保持するように構成されている。
【0017】
次に、本発明の処理装置の動作について説明する。
図1、図2に示されているように、ポッド110がロードポート114に供給されると、ポッド搬入搬出口112がフロントシャッタ113によって開放され、ロード、ポッド搬入搬出口112から搬入される。
搬入されたポッド110は、回転棚105の指定された棚板117へ、ポッド搬送装置118によって、自動的に搬送されて受け渡される。回転棚105では、受取ったポッド110がセンサフラグ5を押し動かし、変位させる。センサフラグ5の変位を、回転棚105の周囲に固定して設けられたセンサ7が検出する。このセンサ7の検出により、処理装置100は、回転棚105にポッド110が正しく受け渡されたと判断する。ポッド搬送装置118が回転棚105からポッドを回収する際も、概上述の逆の手順でポッド110が正しく受け渡されたと判断する。
【0018】
ポッド110は回転棚105で一時的に保管された後、棚板117から一方のポッドオープナ121に搬送されて載置台122に移載されるか、もしくは、ロードポート114から直接、ポッドオープナ121に搬送されて、載置台122に移載される。この際、ポッドオープナ121のウエハ搬入搬出口120は、キャップ着脱機構123によって閉じられており、移載室124にはクリーンエア133が流通され、充満されている。例えば、移載室124には、クリーンエア133として窒素ガスが充満することにより、酸素濃度が20ppm以下になるよう、筐体111の内部(大気雰囲気)の酸素濃度よりも遥かに低く設定されている。
【0019】
図2に示すように、載置台122に載置されたポッド110は、その開口側端面が、サブ筐体119の正面壁119aにおけるウエハ搬入搬出口120の開口縁辺部に押し付けられるとともに、そのキャップが、キャップ着脱機構123によって取り外され、ポッド110のウエハ出し入れ口が開放される。また、予め内部が大気圧状態とされていたロードロック室141のウエハ搬入搬出開口142が、ゲートバルブ143の動作により開放されると、ウエハ200は、ポッド110からウエハ移載装置125aのツイーザ125cによって、ウエハ出し入れ口を通じてピックアップされ、ノッチ合わせ装置135にてウエハを整合した後、ウエハ搬入搬出開口142を通じてロードロック室141に搬入され、ボート217へ移載されて装填(ウエハチャージング)される。ボート217にウエハ200を受け渡したウエハ移載装置125aは、ポッド110に戻り、次のウエハ110をボート217に装填する。
【0020】
この一方(上段または下段)のポッドオープナ121におけるウエハ移載装置125によるウエハ200のボート217への装填作業中に、他方(下段または上段)のポッドオープナ121には、回転棚105ないしロードポート114から別のポッド110がポッド搬送装置118によって搬送され、ポッドオープナ121によるポッド110の開放作業が同時進行される。
【0021】
予め指定された枚数のウエハ200がボート217に装填されると、ウエハ搬入搬出開口142がゲートバルブ143によって閉じられ、ロードロック室141は排気管145から真空引きされることにより、減圧される。
ロードロック室141が処理炉202内の圧力と同圧に減圧されると、処理炉202の下端部が炉口ゲートバルブ147によって開放される。このとき、炉口ゲートバルブ147は炉口ゲートバルブカバー149の内部に搬入されて収容される。
続いて、シールキャップ219がボートエレベータ115によって上昇されて、シールキャップ219に支持されたボート217が、処理炉202内へ搬入(ローディング)されて行く。
【0022】
ローディング後は、処理炉202にてウエハ200に任意の処理が実施される。処理後は、ボートエレベータ115によりボート217が引き出され、更に、ロードロック室140内部を大気圧に復圧させた後にゲートバルブ143が開かれる。その後は、ノッチ合わせ装置135でのウエハの整合工程を除き、概上述の逆の手順で、ウエハ200およびポッド110は筐体111の外部へ払出される。
【0023】
以下に、本発明の各実施形態に係る処理炉202を、図3を用いて説明する。図3は、本発明の各実施形態で好適に用いられる基板処理装置の処理炉202の概略構成図であり、縦断面図として示されている。
http://sgpat2.head.hitachi.co.jp/pat_www/fpic?AA04304128/000003.gif図3に示されているように、処理炉202は、加熱機構としてのヒータ206を有する。ヒータ206は円筒形状であり、保持板としてのヒータベース251に支持されることにより垂直に据え付けられている。
【0024】
ヒータ206の内側には、ヒータ206と同心円状に反応管としてのプロセスチューブ203が配設されている。プロセスチューブ203は、内部反応管としてのインナーチューブ204と、その外側に設けられた外部反応管としてのアウターチューブ205とから構成されている。インナーチューブ204は、例えば石英(SiO2 )または炭化シリコン(SiC)等の耐熱性材料からなり、上端および下端が開口した円筒形状に形成されている。インナーチューブ204の筒中空部には、処理室201が形成されており、基板としてのウエハ200を、後述するボート217によって、水平姿勢で垂直方向に多段に整列した状態で収容可能に構成されている。アウターチューブ205は、例えば石英または炭化シリコン等の耐熱性材料からなり、内径がインナーチューブ204の外径よりも大きく、上端が閉塞し下端が開口した円筒形状に形成されており、インナーチューブ204と同心円状に設けられている。
【0025】
アウターチューブ205の下方には、アウターチューブ205と同心円状に、マニホールド209が配設されている。マニホールド209は、例えばステンレス等からなり、上端および下端が開口した円筒形状に形成されている。マニホールド209は、インナーチューブ204とアウターチューブ205に係合しており、これらを支持するように設けられている。なお、マニホールド209とアウターチューブ205との間には、シール部材としてのOリング220aが設けられている。マニホールド209がヒータベース251に支持されることにより、プロセスチューブ203は垂直に据え付けられた状態となっている。プロセスチューブ203とマニホールド209により、反応容器が形成される。
【0026】
後述するシールキャップ219には、ガス導入部としてのノズル230が、処理室201内に連通するように接続されており、ノズル230には、ガス供給管232が接続されている。ガス供給管232のノズル230との接続側と反対側である上流側には、ガス流量制御器としてのMFC(マスフローコントローラ)241を介して、図示しない処理ガス供給源や不活性ガス供給源が接続されている。MFC241には、ガス流量制御部235が電気的に接続されており、供給するガスの流量が所望の量となるよう所望のタイミングにて制御するように構成されている。
【0027】
マニホールド209には、処理室201内の雰囲気を排気する排気管231が設けられている。排気管231は、インナーチューブ204とアウターチューブ205との隙間によって形成される筒状空間250の下端部に配置されており、筒状空間250に連通している。排気管231のマニホールド209との接続側と反対側である下流側には、圧力検出器としての圧力センサ245および圧力調整装置242を介して、真空ポンプ等の真空排気装置246が接続されており、処理室201内の圧力が所定の圧力(真空度)となるよう、真空排気し得るように構成されている。圧力調整装置242および圧力センサ245には、圧力制御部236が電気的に接続されており、圧力制御部236は、圧力センサ245により検出された圧力に基づいて、圧力調整装置242により、処理室201内の圧力が所望の圧力となるよう所望のタイミングにて制御するように構成されている。
【0028】
マニホールド209の下方には、マニホールド209の下端開口を気密に閉塞可能な、炉口蓋体としてのシールキャップ219が設けられている。シールキャップ219は、マニホールド209の下端に、垂直方向下側から当接されるようになっている。シールキャップ219は、例えばステンレス等の金属からなり、円盤状に形成されている。シールキャップ219の上面には、マニホールド209の下端と当接するシール部材としてのOリング220bが設けられる。シールキャップ219の処理室201と反対側には、ボートを回転させる回転機構254が設置されている。回転機構254の回転軸255は、シールキャップ219を貫通して、後述するボート217に接続されており、ボート217を回転させることでウエハ200を回転させるように構成されている。シールキャップ219は、プロセスチューブ203の外部に垂直に設備された昇降機構としてのボートエレベータ115によって、垂直方向に昇降されるように構成されており、これによりボート217を、処理室201に対し搬入搬出することが可能となっている。回転機構254及びボートエレベータ115には、駆動制御部237が電気的に接続されており、所望の動作をするよう所望のタイミングにて制御するように構成されている。
【0029】
基板保持具としてのボート217は、例えば石英や炭化珪素等の耐熱性材料からなり、複数枚のウエハ200を、水平姿勢でかつ互いに中心を揃えた状態で整列させて多段に保持するように構成されている。なお、ボート217の下部には、例えば石英や炭化珪素等の耐熱性材料からなる円板形状をした断熱部材としての断熱板216が、水平姿勢で多段に複数枚配置されており、ヒータ206からの熱がマニホールド209側に伝わりにくくなるよう構成されている。
【0030】
プロセスチューブ203内には、温度検出器としての温度センサ263が設置されている。ヒータ206と温度センサ263には、電気的に温度制御部238が接続されており、温度センサ263により検出された温度情報に基づき、ヒータ206への通電具合を調整することにより、処理室201内の温度が所望の温度分布となるよう所望のタイミングにて制御するように構成されている。
【0031】
ガス流量制御部235、圧力制御部236、駆動制御部237、温度制御部238は、図示しない操作部、入出力部とともに、基板処理装置全体を制御する主制御部239に電気的に接続されている。これら、ガス流量制御部235、圧力制御部236、駆動制御部237、温度制御部238、主制御部239は、コントローラ240として構成されている。
【0032】
次に、上記構成に係る処理炉202を用いて、半導体デバイスの製造工程の一工程として、CVD法によりウエハ200上に薄膜を形成する方法について説明する。尚、以下の説明において、基板処理装置を構成する各部の動作はコントローラ240により制御される。
【0033】
複数枚のウエハ200がボート217に装填(ウエハチャージ)されると、図3に示されているように、複数枚のウエハ200を保持したボート217は、ボートエレベータ115によって持ち上げられて、処理室201に搬入(ボートローディング)される。この状態で、シールキャップ219は、Oリング220bを介して、マニホールド209の下端をシールした状態となる。
【0034】
処理室201内が所望の圧力(真空度)となるように、真空排気装置246によって真空排気される。この際、処理室201内の圧力は、圧力センサ245で測定され、この測定された圧力に基づき圧力調節器242が、フィードバック制御される。また、処理室201内が所望の温度となるように、ヒータ206によって加熱される。この際、処理室201内が所望の温度分布となるように、温度センサ263が検出した温度情報に基づき、ヒータ206への通電具合がフィードバック制御される。続いて、回転機構254により、ボート217が回転されることで、ウエハ200が回転される。
【0035】
次いで、処理ガス供給源から供給され、MFC241にて所望の流量となるように制御されたガスは、ガス供給管232を流通してノズル230から、処理室201内に導入される。導入されたガスは、処理室201内を上昇し、インナーチューブ204の上端開口から筒状空間250に流出して、排気管231から排気される。ガスは、処理室201内を通過する際にウエハ200の表面と接触し、この際に熱CVD反応によってウエハ200の表面上に、薄膜が堆積(デポジション)される。
【0036】
予め設定された処理時間が経過すると、不活性ガス供給源から不活性ガスが供給され、処理室201内が不活性ガスに置換されるとともに、処理室201内の圧力が常圧に復帰される。
【0037】
その後、ボートエレベータ115によりシールキャップ219が下降されて、マニホールド209の下端が開口されるとともに、処理済ウエハ200がボート217に保持された状態で、マニホールド209の下端から、プロセスチューブ203の外部に搬出(ボートアンローディング)される。その後、処理済ウエハ200は、ボート217より取出される(ウエハディスチャージ)。
【0038】
なお、一例を示すと、本実施の形態の処理炉にてウエハを処理する際の処理条件としては、例えば、酸化膜の成膜においては、処理温度(150〜1050)℃、処理圧力(0〜101300)Pa、ガス種(H2O)、ガス供給流量(20)sccmが例示され、それぞれの処理条件を、それぞれの範囲内のある値で一定に維持することでウエハに処理がなされる。
【0039】
次に、第1の実施形態における、回転棚105の検出部1について、図4、図5を用いて説明する。図4は、本発明の各実施形態に係る回転棚の概略を示す図である。図5は、本発明の第1の実施形態に係る検出部の垂直断面図である。図4に示すように、3段の各棚板117が、駆動ユニット4により、支柱116を中心にして回転可能なようになっている。各棚板117には、センサフラグ5が、ポッド110の載置位置に対応して設けられている。例えば、各棚板117に5つのポッド110が載置可能な場合は、センサフラグ5は、各棚板117に5つ設けられる。
また、センサフラグ5に対向するように、センサ7が筐体111に固定して取り付けられている。センサ7は、ポッド搬送装置118が回転棚105との間で、ポッド110を受渡しする位置におけるセンサフラグ5の動作を検出可能な位置に設置する。したがって、センサ7は、各棚板117に対し、少なくとも1つあればよい。もちろん、センサ7は、全てのセンサフラグ5に1対1で対応させて設けることもできる。センサ7の設置方法は、筐体111に直接固定するか、ステー(部材)を介して筐体111に固定する。各センサ7には、信号ケーブル2が接続されている。検出部1は、筐体111と棚板117、センサフラグ5、スプリング6、センサ7で構成されている。
3は、回転棚105の回転位置(角度)が基準位置にあることを検出する基準位置センサである。基準位置センサ3は固定されており、例えば、基準位置センサ3を発光部と受光部とを有する光センサで構成し、棚板117の裏側の所定位置に反射体を設けることで、回転棚105の回転位置が基準位置にあることを検出できる。
【0040】
第1の実施形態においては、図5に示すように、センサフラグ55は、棚板117にスプリング56と共に取り付けられており、棚板117に対し水平方向に動作、変位する。スプリング56は、センサフラグ55と棚板117の間に常に力(例えば、プリロード)を加えており、センサフラグ55に外力が働かない場合、常に決められた位置で保持する働きをする。つまり、スプリング56は、図5(a)に示すように、センサフラグ55に対し、常に支柱116方向の力を加えている。棚板117にポッド110が載せられると図5(b)に示すように、ポッド110の重さでセンサフラグ5が水平方向に押し動かされ、センサ57がこの動きを検出する。
センサ57は、筐体111に直接もしくはステー等を介して固定されている。固定する位置は、センサフラグ5のフラグの動作を検出可能な位置に設定する。回転棚105の駆動ユニット4には、アブソリュート式エンコーダ及び基準点を検出するフラグを内蔵し、回転棚の絶対位置をリアルタイムで検出可能にする。
【0041】
図5に示すように、第1の実施形態ではセンサフラグ55が水平方向に動作する構造を有している。センサフラグ55には、支軸55bが設けられており、棚板117には支軸孔51a、51bが設けられている。センサフラグ55にポッド110が接触した際や、接触していたポッド110が移動した場合は、支軸孔51aと51bを結ぶ直線に沿って、センサフラグ55が水平にスライドする。センサフラグ55には鍔部55aが設けられており、鍔部55aと支軸孔51bの間にスプリング56を挿入することで、センサフラグ55にポッド110が接触していない状態では、図5(a)に示すように、常に同じ位置で待機可能にする。
センサ57の向きは、図5(a)に示すように、例えば光センサの場合は、発光部57aと受光部57bを結ぶ光軸が、回転棚105の回転軸と平行になるようにし、回転棚105が回転動作しても、棚板117やセンサフラグ55とセンサ57が干渉しないようにする。センサ57の設置個数は、棚板117の数に比例し、各棚板117に少なくとも1個設置する。
この様な形状を採用することにより、センサフラグ55が棚板117の上面及び下面より垂直方向に大きく突出することがないので、搬送中のポッド110がセンサフラグ55と接触するというトラブルを防止し易い。また、センサフラグ55が棚板117の上面及び下面より、垂直方向に変位しないので、棚板117間のクリアランスを最小限に抑えることが可能になり、回転棚105自体の高さを抑えることも可能である。
【0042】
(第2の実施形態)
次に、回転棚105の検出部1の第2の実施形態について、図6を用いて説明する。図6は、第2の実施形態に係る検出部1の垂直断面図である。検出部1の構成以外は、第1の実施形態の場合と同様である。検出部1の構成は、第1の実施形態と同様に、筐体111と棚板117、センサフラグ65、スプリング66、センサ67となっている。
センサフラグ65は、棚板117にスプリング66と共に取り付けられており、棚板117に対し鉛直方向に動作、変位する。スプリング66は、センサフラグ65と棚板117の間に常に力(例えば、プリロード)を加えており、センサフラグ65に外力が働かない場合、図6(a)に示すように、常に決められた位置で保持する働きをする。棚板117にポッド110が載せられると、図6(b)に示すように、ポッド110の重さでセンサフラグ65が押し動かされ、センサ67がこの動きを検出する。
図6(a)に示すように、棚板117にポッド110が載置されていない場合は、センサフラグ65が上記決められた位置にあるため、センサ67が例えば光センサの場合は、光を検出する。図6(b)に示すように、棚板117にポッド110が受け渡されると、センサフラグ65が垂直方向下方に変位し、センサ67が光を検出しなくなることで、ポッド110が棚板117へ正常に受け渡されたと判断する。
【0043】
(第3の実施形態)
次に、回転棚105の検出部1の第3の実施形態について、図7を用いて説明する。図7は、第3の実施形態に係る検出部1の垂直断面図である。検出部1の構成以外は、第1の実施形態の場合と同様である。検出部1は、筐体111と棚板117、センサフラグ75、スプリング76、発信部78、センサ77で構成されている。
ポッド110が棚板117の所定の位置に載置されると、センサフラグ75が動き、発信部78から発せられている信号(例えば赤外線)を、センサ77へ誘導(例えば反射)することで、センサ77がセンサフラグ75の動きを検出する。このセンサ77の検出により、ポッド110が棚板117に載置されたと判断する。
図7の例では、センサフラグ75に反射板75cを持たせる。発信部78は、受渡し部の下もしくは上付近に設置し、例えば発信部78から光を発する場合、光軸79が回転棚105の軸と平行になるよう固定する。
図7(a)に示すように、棚板117にポッド110が載置されていない場合は、センサフラグ75が発信部78からの光79を反射しないため、センサ77は光を検出しない。図7(b)に示すように、棚板117にポッド110が受け渡されると、センサフラグ75が水平方向に変位し、発信部78からの光を反射し、センサ77が反射光を検出することで、ポッド110が棚板117へ正常に受け渡されたと判断する。
【0044】
従来の回転棚を製作する場合は、(1)機械加工のスキル、(2)機械組立のスキル、(3)ケーブル製作のスキル、(4)ケーブル配線・養生のスキルが必要であったが、上述した実施形態によれば、(3)ケーブル製作のスキル、(4)ケーブル配線・養生のスキルが不要となる。したがって、純粋な機械加工のみで製作することが可能になり、回転棚の生産性が向上する。
【0045】
なお、本発明は、前記各実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々に変更が可能であることはいうまでもない。
また、前記各実施形態ではセンサを光センサで説明したが、機械式接点センサや静電センサを用いることもできる。
【0046】
上述したように、本発明の一態様によれば、第1の発明として、
複数の基板が収容される基板収容器が搬入出されるロードポートと、
前記基板収容器を複数収納する移動可能な容器収納棚と、
基板を移載する際に基板収容器が載置される移載棚と、
前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、
前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、
少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、
前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、
前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置が提供される。
このようにすると、移動可能な容器収納棚の移動制限を抑え、基板処理装置のスループットを向上することができる。
【0047】
好ましくは第2の発明として、前記第1の発明の基板処理装置であって、
前記基板収容器検出センサの取付位置を、ポッドをポッド搬送装置から回転棚へ受け渡す位置とすることを特徴とする基板処理装置が提供される。
このようにすると、各回転棚に設ける基板収容器検出センサが1つで済む。
【符号の説明】
【0048】
1…検出部、2…信号ケーブル、3…基準位置センサ、4…駆動ユニット、5…センサフラグ、6…スプリング、7…センサ、51a…支軸孔、51b…支軸孔、55…センサフラグ、55a…鍔部、55b…支軸、56…スプリング、57…センサ、57a…発光部、57b…受光部、65…センサフラグ、66…スプリング、67…センサ、67a…発光部、67b…受光部、75…センサフラグ、75c…反射板、76…スプリング、77…センサ、78…発信部、79…光軸、100…コントローラ、105…回転棚、110…ポッド、111…筐体、115…ボートエレベータ、116…支柱、117…棚板、118…ポッド搬送装置、125…基板移載機構、200…ウエハ、202…熱処理炉、217…ボート。
【特許請求の範囲】
【請求項1】
複数の基板が収容される基板収容器が搬入出されるロードポートと、
前記基板収容器を複数収納する移動可能な容器収納棚と、
基板を移載する際に基板収容器が載置される移載棚と、
前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、
前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、
少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、
前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、
前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置。
【請求項1】
複数の基板が収容される基板収容器が搬入出されるロードポートと、
前記基板収容器を複数収納する移動可能な容器収納棚と、
基板を移載する際に基板収容器が載置される移載棚と、
前記ロードポートと、前記容器収納棚と、前記移載棚との間で前記基板収容器を搬送する容器搬送装置と、
前記移載棚に載置された基板収容器内の基板の移載を行う基板移載装置と、
少なくとも前記容器搬送装置、前記基板移載装置の駆動を制御する制御装置とを備え、
前記容器収納棚には、基板収容器が載置されることにより変位するフラグを備え、
前記容器収納棚の周囲には、前記フラグを検出するための基板収容器検出センサが固定して設けられることを特徴とする基板処理装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−181817(P2011−181817A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−46519(P2010−46519)
【出願日】平成22年3月3日(2010.3.3)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月3日(2010.3.3)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
[ Back to top ]