
基板収納容器及びそのハンドル
【課題】容器本体の変形を低減し、容器本体内の基板と容器本体との擦れを抑制してパーティクルの発生を防止すると共に、基板を位置精度良く保持することが可能な基板収納容器及びそのハンドルを提供する。
【解決手段】基板収納容器1のハンドル10を、容器本体2の側壁21の互いに対向する周縁部分21a,21bに取り付け可能な構成とする。容器本体2の側壁21の周縁部分21a,21bは、側壁21面より剛性が高く変形し辛いので、側壁21の周縁部分21a,21bにハンドル10を固定可能な構成とすることで、ハンドル10を容器本体2に固定して使用した際に、従前に比して容器本体2の変形が低減される。これにより、容器本体2と容器本体2内の基板との擦れを防止して、パーティクルの発生を抑制する。また、容器本体2の変形が低減され、容器本体2内の基板の位置精度が向上される。
【解決手段】基板収納容器1のハンドル10を、容器本体2の側壁21の互いに対向する周縁部分21a,21bに取り付け可能な構成とする。容器本体2の側壁21の周縁部分21a,21bは、側壁21面より剛性が高く変形し辛いので、側壁21の周縁部分21a,21bにハンドル10を固定可能な構成とすることで、ハンドル10を容器本体2に固定して使用した際に、従前に比して容器本体2の変形が低減される。これにより、容器本体2と容器本体2内の基板との擦れを防止して、パーティクルの発生を抑制する。また、容器本体2の変形が低減され、容器本体2内の基板の位置精度が向上される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェーハ、マスクガラス、ペリクル付きマスクガラス、ペリクル等の基板を収納する基板収納容器とこれに取り付けられるハンドルに関する。
【背景技術】
【0002】
基板の輸送に使用される基板収納容器として、例えば、特許文献1に開示された基板収納容器が知られている。この基板収納容器は、正面に開口が形成され内部に基板を収納する容器本体と、容器本体の開口を閉鎖する蓋体とを備えている。こうした基板収納容器の容器本体の側壁の内面には、基板を一定間隔で水平に支持する支持部が形成されている。また、容器本体の側壁の外面の中央部には、ハンドル(把手)が取り付けられているので、作業者がこのハンドルを握ることで、基板収納容器を持ち上げ易くなり、容器に基板収納容器を運ぶことができる。
【特許文献1】特開2000−306988号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載の従来技術では、容器本体の側壁の中央付近にハンドルが固定されていたので、作業者がハンドルを握って基板収納容器を持ち運ぶ際に、基板収納容器の荷重により側壁が変形し易くなり、側壁が変形することで、容器本体と容器本体内の基板との間で擦れが生じて、基板に悪影響を及ぼすパーティクルが増加するという問題があった。また、側壁が変形することにより、容器本体内の位置精度が低下するとういう問題があった。
【0004】
本発明は、このような課題を解決するために成されたものであり、容器本体の変形を低減して、容器本体内の基板と容器本体との擦れを抑制してパーティクルの発生を防止すると共に、基板を位置精度良く保持することが可能な基板収納容器及びそのハンドルを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明による基板収納容器は、開口部を有し基板を収納する容器本体と、開口部を閉鎖する蓋体とを備えた基板収納容器において、容器本体の対向する一対の側壁に設けられた一対のハンドルを備え、ハンドルは、側壁の周縁部分に固定されていることを特徴としている。
【0006】
このような基板収納容器によれば、ハンドルが容器本体の側壁の周縁部分に固定されている。容器本体の側壁の周縁部分は、容器本体の天板や底板との間に稜線を形成しており、側壁面より剛性が高く変形し辛いので、側壁の周縁部分にハンドルの固定位置を設けることで、従前に比して容器本体の変形を低減することができる。これにより、容器本体と容器本体内の基板との擦れを防止して、パーティクルの発生を抑制することができる。また、容器本体の変形が低減されるので、容器本体内の基板を位置精度良く保持することができる。また、ハンドルの固定位置が側壁の互いに対向する周縁部分に設けられているので、作業者が基板収納容器を持ち上げる際に、安定して保持することができる。なお、「周縁部分」とは、周縁及びその近傍を含むものである。
【0007】
また、ハンドルは、側壁の互いに対向する周縁部分に固定されていることが好ましい。このように、ハンドルの固定位置が側壁の互いに対向する周縁部分に設けられているので、容器本体の変形を一層低減させることができる。
【0008】
また、ハンドルは、作業者によって握られるグリップと、グリップの両端部から連続して形成され、側壁の周縁部に形成された被係合部に係合可能な係合部とを備えることが好ましい。
【0009】
また、グリップの長手方向の中心は、容器本体の重心より開口部側に配置されていることが好ましい。これにより、作業者がグリップを握って基板収納容器を持ち上げた際に、容器本体の重心がグリップの中心より後方に配置されるため、安定的に保持することができると共に、容器本体の開口部側が上方へ向き易くなるため、容器本体内の基板が開口部から落下する虞が低減される。
【0010】
また、係合部又は被係合部の何れか一方は、係止爪を備え、他方は、係止爪が係止される係止穴を備えていることが好ましい。これにより、係止爪を係止穴に係止させることで、ハンドルを容器本体に確実に固定することができる。なお、「係止穴」は、貫通孔、凹部を含み、その形状は限定されない。係止穴は、係止爪を係止可能であればよい。
【0011】
また、ハンドルは、側壁の周縁部分に沿って固定され、周縁部分から外方に突出する把持部を有していることが好ましい。これにより、ハンドルを簡素な構造とし、容器本体の変形を低減することができる。
【0012】
本発明による基板収納容器のハンドルは、開口部を有し基板を収納する基板収納容器の容器本体の側壁に取り付けられるハンドルにおいて、作業者によって握られるグリップと、グリップの両端部に接続され、側壁の互いに対向する周縁部分に形成された被係合部に係合可能な係合部とを備えることを特徴としている。
【0013】
このような基板収納容器のハンドルによれば、容器本体の側壁の互いに対向する周縁部分に取り付け可能な構成とされている。容器本体の側壁の周縁部分は、側壁面より剛性が高く変形し辛いので、側壁の周縁部分に固定可能な構成とすることで、ハンドルを容器本体に固定して使用した際に、容器本体の変形を低減することができる。これにより、容器本体と容器本体内の基板との擦れを防止して、パーティクルの発生を抑制することができる。また、容器本体の変形が低減されるので、容器本体内の基板を位置精度良く保持することができる。また、側壁の互いに対向する周縁部分にハンドルを固定可能な構成とされているので、ハンドルを容器本体に固定していて使用した際に、作業者は基板収納容器を安定して保持することができる。なお、「周縁部分」とは、周縁及びその近傍を含むものである。
【発明の効果】
【0014】
本発明の基板収納容器及びそのハンドルによれば、容器本体の変形を低減することができるため、容器本体内の基板と容器本体との擦れを抑制してパーティクルの発生を防止すると共に、基板を位置精度良く保持することができる。
【発明を実施するための最良の形態】
【0015】
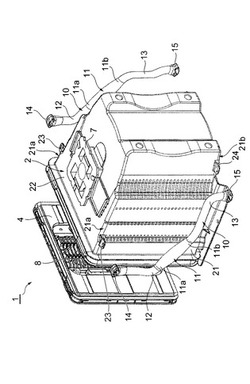
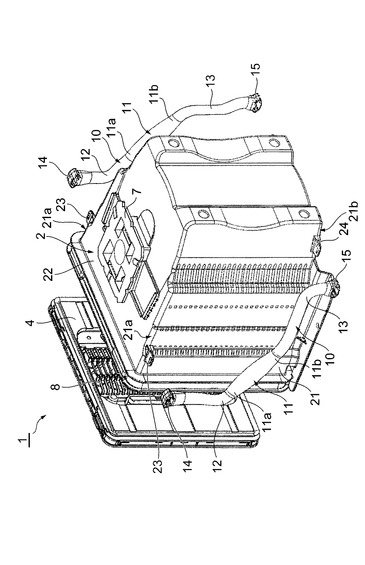
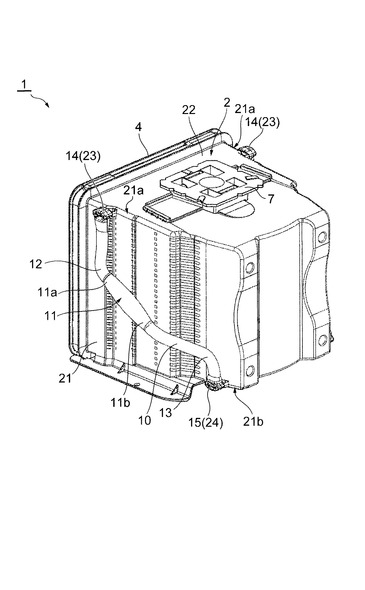
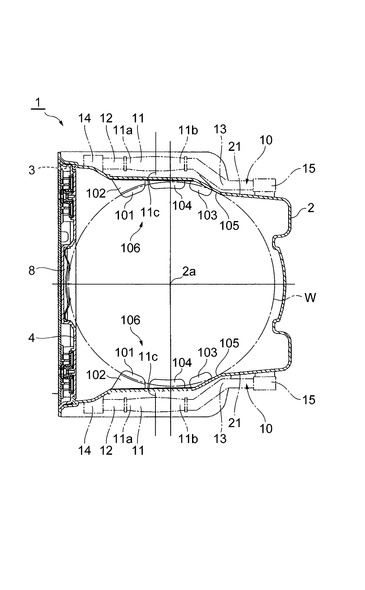
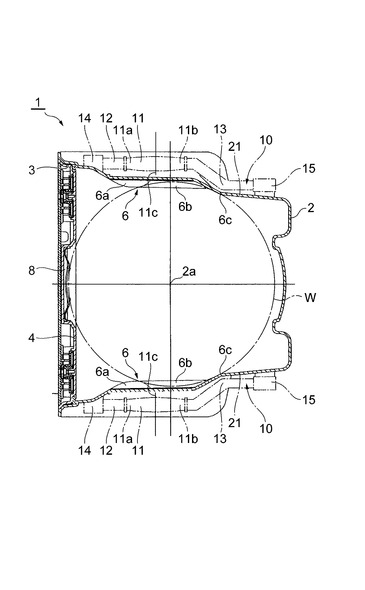
以下、本発明による基板収納容器及びそのハンドルの好適な実施形態について図面を参照しながら説明する。なお、図面の説明において、同一または相当要素には同一の符号を付し、重複する説明は省略する。図1は、本発明の実施形態に係る基板収納容器を背面側から示す分解斜視図、図2は、本発明の実施形態に係る基板収納容器を背面側から示す斜視図、図3は、本発明の実施形態に係る基板収納容器の横断面図である。
【0016】
図1〜図3に示す基板収納容器1は、基板Wを1又は複数枚(例えば6,13,25枚)収容し、輸送、搬送、保管などに使用される収納容器である。この基板収納容器1は、基板Wを収容する容器本体2、この容器本体2に設けられた開口部3を閉鎖する蓋体4を備えている。容器本体2は、基板Wを整列収納可能な構成とされている。蓋体4には、容器本体2の開口部3の対向する一対の周縁に係止される係止機構が設置されている。容器本体2の開口部3に蓋体4が装着され、基板収納容器1内は密閉状態となる。また、蓋体4の背面側(基板収納容器の内面)には、複数の基板Wを上下方向に水平に並べて支持するリテーナ8が取り付けられている。
【0017】
基板収納容器1のうち、容器本体2、蓋体4、位置決め部(不図示)、ロボティックフランジ7、及びハンドル10は、例えば、熱可塑性樹脂やこれらのアロイによって形成され、熱可塑性樹脂としては、ポリカーボネート、シクロオレフィンポリマー、ポリエーテルイミド、ポリエーテルサルフォン、ポリエーテルケトン、ポリブチレンテレフタレート、ポリエーテルエーテルケトン、液晶ポリマー、環状オレフィン樹脂等が挙げられる。また、熱可塑性樹脂に、導電剤や各種帯電防止剤を添加しても良い。導電剤としては、カーボンブラック、アセチレンブラック、炭素繊維、カーボンナノチューブ、金属繊維、金属酸化物、導電性ポリマー等が挙げられる。帯電防止剤としては、アニオン系、カチオン系、非イオン系等の帯電防止剤が挙げられる。
【0018】
また、熱可塑性樹脂に紫外線吸収剤を添加しても良く、紫外線吸収剤としては、ベンゾトリアゾール系、サリシレート系、シアノアクリレート系、オキザリックアシッドアニリド系、ビンダードアミン系等の紫外線吸収剤が挙げられる。また、剛性を高めるための添加剤を熱可塑性樹脂に添加しても良く、例えば、ガラス繊維、炭素繊維等が挙げられる。
【0019】
また、基板収納容器1は、セラミックや、例えばジュラルミン、チタン合金等の金属材料によって形成することができる。このようにして、基板収納容器1の軽量化を図っても良い。
【0020】
基板収納容器1内に収容される基板Wは、例えば直径300mmの円盤状のシリコンウェーハからなり、表裏両面がそれぞれ鏡面加工されている。基板Wは、専用のロボットにより左右の側部周縁がハンドリングされた状態で、容器本体2内に出し入れされる。基板Wの周縁には、結晶方向の判別や整列を容易にするノッチが形成されている。このノッチは、平面視において、例えば半円形状を成している。
【0021】
容器本体2は、透明性や高剛性に優れるポリカーボネート等の所定の樹脂を用いて成形されている。容器本体2は、正面に開口したフロントオープンボックスタイプであり、容器本体2の両側壁21には、基板Wを水平に支持するティース106が各々形成されている。このティース106は、図示上下方向に所定のピッチで複数配列され、このティース106によって、基板Wが水平状態で上下方向に並べて整列収納される。
【0022】
各ティース106は、基板Wを支持可能な構成であればよく、その形状は限定されない。ティース106の形状としては、例えば、平面視において、長方形、「く」の字形、半円弧形状等が挙げられる。ティース106は、基板Wの周縁に沿うように形成された棚部と、この棚部上に形成され、基板Wと接触する平坦面を有する基板接触部101,103とを備えている。ここで、棚部及び基板接触部を図3にあるように開口部3側と背面側とに分割して設け、これらの中間部に通常は基板Wと接触しない補助支持部104を設けることができる。補助支持部104は、基板接触部101,103よりも低い位置に設けられ、基板Wの挿入時に隣接する基板接触部101へ挿入されること(クロススロット)を防止している。
【0023】
また、ティース106の開口部3側には、基板Wの位置を規制する位置規制用段差102が形成されている。この位置規制用段差102と、容器本体2の奥側(開口部と反対側)で基板Wの形状に沿って形成された基板接触部103の壁面部分105とによって、容器本体2内の基板Wの前後方向の動きを規制することができる(なお、正面側を「前」、背面側を「後」とする)。上記した実施形態の補助支持部104を設けず、開口部3側の基板接触部と、背面側の基板接触部の2箇所だけにして両者の中間部には、空間をあけておくこともできる。
【0024】
このような構成のティース106は、容器本体2とは別部品として形成され、容器本体2を成形する時にインサートされて容器本体と一体的に設けられたり、熱溶着、摩擦係合、螺刻部品等を利用して固定することができる。図13は、ティースの他の例を示す横断面図である。図13に示すように、ティース6は、平面視において、背面側が「く」の字形に屈曲した長方形状とした開口部から連続する棚部となるように容器本体2に一体に形成しても良い。この場合も、棚部は、基板接触部6bと基板の前後方向の位置規制を行う領域6a、6cを有し、基板を水平に支持可能となる。このようなティース6,106によって、基板Wは、容器本体2内において、高精度に位置決めされて支持されている。そのため、基板Wが上下方向に傾斜することが防止され、基板Wを取り出すためのフォークが容器本体2内へ容易に挿入される。
【0025】
容器本体2の底板(底部)の外面には、所定の装置(例えば基板を加工する加工装置等)に対して位置決めを行うための位置決め部が形成されている。位置決め部は、3箇所に設置され、Y字形に配置されている。また、位置決め部には、V字溝(凹部)が形成されている。また、位置決め部の断面形状は、V字形に限定されず、例えば、M字形、逆V字形、逆Y字形あるいは凹んだ小判形等に形成される。
【0026】
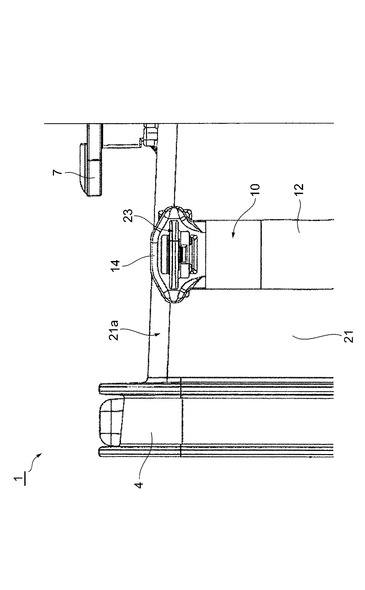
容器本体2の天板22の外面には、平面視において矩形状を成すロボティックフランジ7が形成されている。このロボティックフランジ7は、容器本体2と一体的に形成されたものでもよく、別部品として形成され、容器本体2に対して着脱可能な構成とされたものでもよい。基板収納容器1は、ロボティックフランジ7がOHT(オーバーヘッドホイストトランスファー)と呼ばれる図示しない自動搬送機構によって保持されて、工場内を搬送される。
【0027】
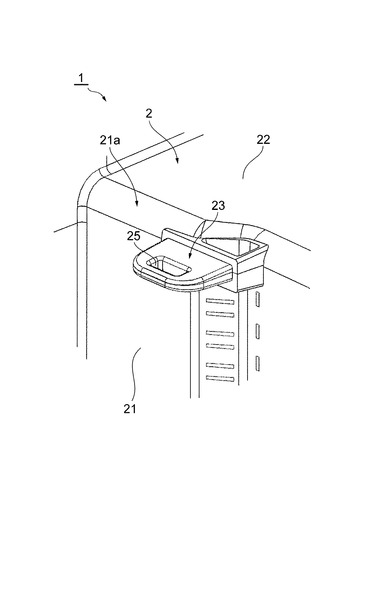
ここで、基板収納容器1は、容器本体2の対向する一対の側壁21,21に設けられた一対のハンドル10を備え、このハンドル10は容器本体2の側壁21の周縁部分に固定されている。具体的には側壁21の対向する周縁部分であるコーナー部分(稜線部分)21a,21bに着脱可能に固定されている。ハンドル10の固定位置として、コーナー部分21a,21bには、ハンドル10を係合するための被係合部23,24が設置されている。
【0028】
また、ハンドル10の側壁21への固定位置は、側壁21の中央を挟んで互いに対向するコーナー部分21a、21bに配置されることが好ましい。例えば、側壁21の対角線に沿うようにハンドル10が配置され、ハンドル10の固定位置は側壁10の対角に配置されることがより好ましい。また、両側壁21に固定される一対のハンドルは、対称形に配置されることが好ましい。
【0029】
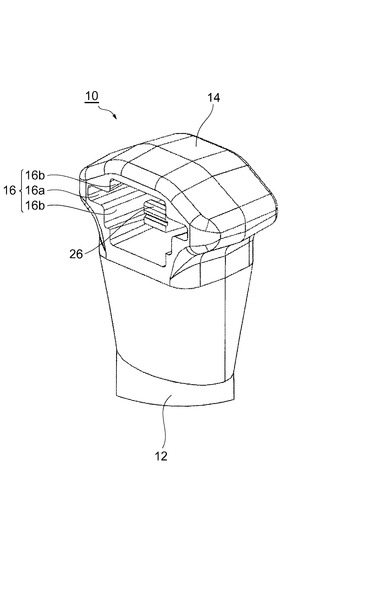
ハンドル10は、作業者によって握られるグリップ11と、このグリップ11の両端部11a,11bから互いに反対方向に連続して形成された湾曲部12,13と、湾曲部12,13の端部に設けられ、被係合部23,24に係合可能な係合部14,15とを備えている。
【0030】
グリップ11は、例えば一定太さの棒状でもよく、長手方向の中心11cの外周が最も太くなるように異なる太さの棒状でもよく、人間工学的に握り易い形状とすることが好ましい。また、グリップ11の長手方向の両端部11a,11bには、外方に突出するフランジ又はリブを設けるようにしてもよい。グリップ11は、ハンドル10を容器本体2に取り付けた状態において、長手方向が傾斜して配置されることが好ましい。具体的には、グリップ11の前側の端部11aが上方に向けられ、グリップ11の後側の端部11bが下方に向けられて配置される。
【0031】
湾曲部12は、グリップ11の端部11aから上方へ湾曲し、湾曲部13は、グリップ11の端部11bから水平方向へ湾曲し、その後部側で下方に湾曲すると共に内方(容器本体2の側壁21側)へ湾曲している。グリップ11は、ハンドル10が容器本体2に取り付けられた状態において、側壁21と所定間隔離間して配置され、作業者が握り易い位置に配置されている。
【0032】
図4は、図1中の被係合部を拡大して示す斜視図である。なお、図4では、被係合部23を示しているが、被係合部24も同様の構成である。被係合部23は、容器本体2の側壁21と天板22との間のコーナー部分21aに設置され、被係合部24は、容器本体2の側壁21と底板との間のコーナー部分21bに設置されている。被係合部23,24は、板状を成し、容器本体2から外方に突出し、被係合部23,24には、係合部14,15の係止爪26(図5参照)を係止する係止穴25が形成されている。また、係止穴25の径は、上下方向において、異なる大きさとされ、図8に示すように、被係合部23では、下部側の径が上部側の径より小さくされ、係止爪26は、被係合部23の下部側から挿入されて、係止穴25の内壁面に係止される。なお、図示していないが、被係合部24は、被係合部23と上下方向が逆に形成され、上部側の径が下部側の径より小さくされ、係合部15の係止爪26は、被係合部24の上部側から挿入されて、被係合部24の係止穴25の内壁面に係止される。
【0033】
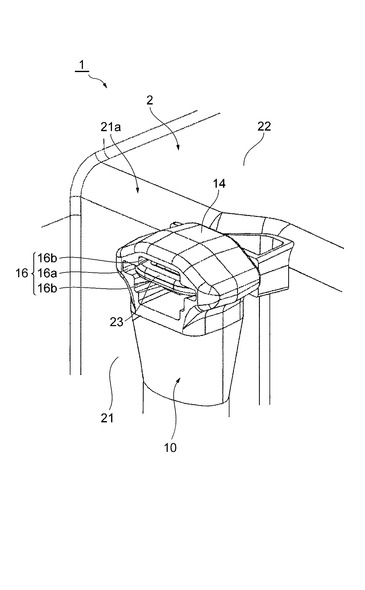
図5は、図1中の係合部を拡大して示す斜視図、図6〜図9は、係合部及び被係合部の係合状態を示す各図である。図5〜図9では、係合部14,15のうち、係合部14のみを示しているが、係合部15も係合部14と同様の構成である。係合部14,15には、被係合部23,24を挿入するための開口部16が形成されている。この開口部16は、側面視において、被係合部23,24に対応する大きさとされた幅広部分16aを有し、この幅広部分16aの上下方向の両側には、幅広部分16aより径が小さくされた幅狭部分16bが形成されている。そして、被係合部23,24は、開口部16内に挿入される。
【0034】
また、係合部14,15は、図8及び図9に示すように、開口部16内に形成された弾性片17を有し、この弾性片17の先端部(側壁21とは反対側の端部)17aには被係合部23,24の係止穴25に係止される係止爪26が形成されている。弾性片17の基端部17b(側壁21側の端部)は、開口部16の湾曲部12側の内壁面16aから突出し、側壁21とは反対方向へ屈曲されている。弾性片17は弾性を有し、先端部17aに形成された係止爪26が係止穴25の傾斜面と接触するように係止される。係止穴25の傾斜面は、図9において、上部側が外方に倒れるように傾斜している。また、係止爪26には、係止穴25の傾斜面に対応して、上部側が外方に倒れるように傾斜面が形成されている。
【0035】
このように係止穴25及び係止爪26に傾斜面が形成されているので、係合状態において、ハンドル10を外す方向の外力P(図9参照)を受けた場合に、係止爪26は傾斜面に沿って、図示S方向に移動することとなり、係止爪26が係止穴25から外れることを効果的に防止することができる。
【0036】
また、弾性片17の先端には外部に露呈した凹部である被操作部17bが形成されている(なお、被操作部は、凹部に代えて凸部でもよい)。容器本体2に取り付けられたハンドル10を取外す際には、被操作部17bを押し下げて、係止爪26を係止穴25から外すことで、ハンドル10と容器本体2とを分離することができる。例えば、被操作部17bに係合する先端を有する専用の治具を準備し、この治具を用いて容易にハンドル10を取外すことができる。
【0037】
そして、ハンドル10を容器本体2に取り付ける際には、係合部14を被係合部23に対応する位置に配置し、係合部15を被係合部24に対応する位置に配置して、ハンドル10を押し込むことで、容器本体2容易に取り付けることができる。
【0038】
ハンドル10は、図3に示すように、容器本体2に取り付けられた状態において、グリップ11の長手方向の中心11cが、容器本体2の重心より開口部3側に配置されている。例えば、グリップ11の中心11cは、容器本体2の重心2aよりも開口部3側(蓋体4側)に約10mm程度ずらして配置されている。これにより、蓋体4を装着していない状態で、容器本体2を持ち上げたとしても、容器本体2の後方側が下方に下がり、開口部3が上方に向くので、誤って基板Wが開口部3から容器本体2外へ飛び出すことが防止される。
【0039】
このような基板収納容器1では、ハンドル10の固定位置である被係合部23,24が、容器本体2の側壁21のコーナー部分21a,21bに設けられている。容器本体2の側壁21のコーナー部分21a,21bは、側壁21より剛性が高く変形し辛いので、コーナー部分21a,21bにハンドル10の固定位置を設けることで、容器本体2の変形が低減されている。そのため、作業者がハンドル10を握って、容器本体2を持ち上げた際の容器本体2の変形が低減される。
【0040】
このように基板収納容器1では、容器本体2の変形が低減されるため、容器本体2と内部に収容された基板Wとの擦れを防止して、パーティクルの発生を抑制することができる。また、容器本体2の変形が低減されるため、基板Wの容器本体2内における位置精度が安定し、基板Wを位置精度良く容器本体2内で保持することができる。そのため、容器本体2内に収容された基板Wを位置精度良く取り出すことができ、取り出しエラーを防止することができる。
【0041】
次に、係合部及び被係合部の他の形態について、図10を参照して説明する。図10は、係合部及び被係合部の他の形態を示す分解斜視図である。図10に示す他の形態が、上記実施形態と違う点は、容器本体2に、係止爪26が形成された被係合部31を備え、ハンドル10に、係止穴25を備えた係合部32を備える点である。このような構成の係合部31及び被係合部32であってもよい。本実施形態のハンドルには、一部分又は全領域に凹凸リブを交互に設けたり、表面の一部分又は全領域に、皮、織布、木目、砂目などのパターンのシボを加工して、汚れの付着を防止したり、滑り止め効果を出すことができる。
【0042】
以上、本発明をその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。上記実施形態において、本発明の基板収納容器を、半導体ウェーハを収納するものとして説明しているが、収納物される基板は、半導体ウェーハに限定されず、マスクガラスを始めとしたその他の精密基板でもよい。また、収容される基板の大きさは、300mmに限定されず、例えば450mm等その他の大きさでもよい。また、収納枚数も1〜25枚に限らず26枚以上であっても良い。
【0043】
また、ハンドルの形状は、上記実施形態に限定されず、その形状は、任意の形状でよい。ハンドルの固定位置が側壁の互いに対向する周縁部分に配置されていればよい。
【0044】
図11は、本発明のハンドルの別の実施形態を示す斜視図である。図11に示すハンドル40は、側面視において逆Y字状に形成され、上下方向に延在するグリップ41を有している。また、容器本体2の稜線部(コーナー部分)への固定部(係合部)42,43が、天板側に1箇所(42)、底板側に2箇所(43)、合計3箇所に形成されている。固定方法は、上記した実施形態と同じ係止構造でも良く、別の係止構造を組み合わせて用いても良い。このように3箇所以上で固定することで、容器本体に固定されるハンドル40のねじれや撓みを防止することができる。その結果、作業者が基板収納容器を持ち上げる際に、安定して保持することができる。
【0045】
また、上記実施形態では、グリップの長手方向が上下方向に傾斜して配置されているが、グリップの長手方向が傾斜して配置されていなくても良い。例えば、グリップ部が円形や多角形状に形成されていて、表面に指がはまり込むような凹凸が形成されたものでもよく、グリップ部が容器の底板と平行でもよく、垂直でもよい。
【0046】
また、上記実施形態では、ハンドルが容器本体2に対して着脱可能な構成とされているが、ハンドルは、容器本体から取外しできないように固定されていてもよい。
【0047】
また、上記実施形態では、グリップの長手方向の中心が、平面視において、容器本体2の重心よりも前方に配置されているが、グリップの長手方向の中心が、容器本体2の重心と同じ位置や、容器本体2の重心より後方に配置されていてもよい。なお、グリップを握って容器本体2を持ち上げた際に、開口部3が上向きと成りやすくするには、上記実施形態のように、グリップの長手方向を傾斜させると共に、グリップの中心を容器本体2の重心よりも、前方に配置させると良い。
【0048】
なお、グリップは作業者によって握られなくてもよい。例えば、ロボット、その他の機械等にグリップを握らせて、容器本体を持ち上げてもよい。
【0049】
また、上記実施形態では、フロントオープンタイプの容器本体に、ハンドルを取り付けているが、例えば開口部が容器本体の天板に形成されたトップオープンタイプのものに、ハンドルを取り付けてもよい。
【0050】
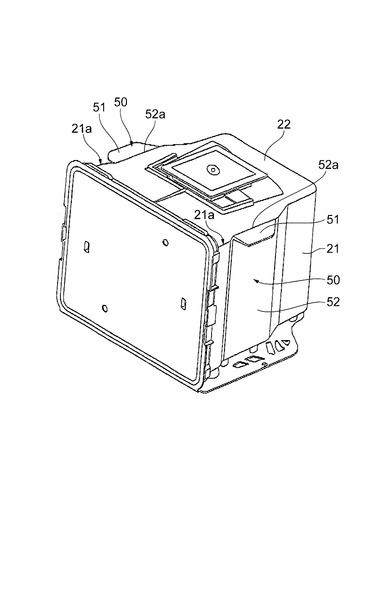
図12は、さらに別の形態のハンドルを備えた基板収納容器を示す斜視図である。この別の形態のハンドル50では、容器本体2の天板22側の稜線部(コーナー部分)21aから、側壁21の外方に突出する把持部51が容器本体2と一体的に形成されている。
【0051】
このハンドル50は、容器本体2の側壁21の外面に固定されたプレート部52を有している。把持部51は、プレート部52の上端部52aで屈曲されて、外方に突出している。プレート部52の上端部52aは、容器本体2の天板22側の稜線部21aに沿って固定され、把持部51は、稜線部21aから外方に突出している。このように、ハンドル50の把持部51が側壁21の稜線部21aから外方に突出しているので、ハンドル50の構造を簡素とすると共に、ハンドル50を握って容器本体2を保持する際の容器本体2の変形を低減することができる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施形態に係る基板収納容器を背面側から示す分解斜視図である。
【図2】本発明の実施形態に係る基板収納容器を背面側から示す斜視図である。
【図3】本発明の実施形態に係る基板収納容器の横断面図である。
【図4】図1中の被係合部を拡大して示す斜視図である。
【図5】図1中の係合部を拡大して示す斜視図である。
【図6】係合部及び被係合部の係合状態を示す斜視図である。
【図7】係合部及び被係合部の係合状態を示す側面図である。
【図8】係合部及び被係合部の係合状態を示す縦断面図である。
【図9】係合部及び被係合部の係合状態を拡大して示す横断面図である。
【図10】係合部及び被係合部の他の形態を示す分解斜視図である。
【図11】本発明のハンドルの別の実施形態を示す斜視図である。
【図12】さらに別の形態のハンドルを備えた基板収納容器を示す斜視図である。
【図13】ティースの他の例を示す横断面図である。
【符号の説明】
【0053】
1…基板収納容器、2…容器本体、2a…容器本体の重心、3…開口部、4…蓋体、10,40,50…ハンドル、11,41…グリップ、11a,11b…グリップの端部、11c…グリップの中心、12,13…湾曲部、14,15,32,42,43…係合部、21…側壁、21a,21b…コーナー部分、23,24,31…被係合部、25…係止穴、26…係止爪、51…把持部。
【技術分野】
【0001】
本発明は、半導体ウェーハ、マスクガラス、ペリクル付きマスクガラス、ペリクル等の基板を収納する基板収納容器とこれに取り付けられるハンドルに関する。
【背景技術】
【0002】
基板の輸送に使用される基板収納容器として、例えば、特許文献1に開示された基板収納容器が知られている。この基板収納容器は、正面に開口が形成され内部に基板を収納する容器本体と、容器本体の開口を閉鎖する蓋体とを備えている。こうした基板収納容器の容器本体の側壁の内面には、基板を一定間隔で水平に支持する支持部が形成されている。また、容器本体の側壁の外面の中央部には、ハンドル(把手)が取り付けられているので、作業者がこのハンドルを握ることで、基板収納容器を持ち上げ易くなり、容器に基板収納容器を運ぶことができる。
【特許文献1】特開2000−306988号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載の従来技術では、容器本体の側壁の中央付近にハンドルが固定されていたので、作業者がハンドルを握って基板収納容器を持ち運ぶ際に、基板収納容器の荷重により側壁が変形し易くなり、側壁が変形することで、容器本体と容器本体内の基板との間で擦れが生じて、基板に悪影響を及ぼすパーティクルが増加するという問題があった。また、側壁が変形することにより、容器本体内の位置精度が低下するとういう問題があった。
【0004】
本発明は、このような課題を解決するために成されたものであり、容器本体の変形を低減して、容器本体内の基板と容器本体との擦れを抑制してパーティクルの発生を防止すると共に、基板を位置精度良く保持することが可能な基板収納容器及びそのハンドルを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明による基板収納容器は、開口部を有し基板を収納する容器本体と、開口部を閉鎖する蓋体とを備えた基板収納容器において、容器本体の対向する一対の側壁に設けられた一対のハンドルを備え、ハンドルは、側壁の周縁部分に固定されていることを特徴としている。
【0006】
このような基板収納容器によれば、ハンドルが容器本体の側壁の周縁部分に固定されている。容器本体の側壁の周縁部分は、容器本体の天板や底板との間に稜線を形成しており、側壁面より剛性が高く変形し辛いので、側壁の周縁部分にハンドルの固定位置を設けることで、従前に比して容器本体の変形を低減することができる。これにより、容器本体と容器本体内の基板との擦れを防止して、パーティクルの発生を抑制することができる。また、容器本体の変形が低減されるので、容器本体内の基板を位置精度良く保持することができる。また、ハンドルの固定位置が側壁の互いに対向する周縁部分に設けられているので、作業者が基板収納容器を持ち上げる際に、安定して保持することができる。なお、「周縁部分」とは、周縁及びその近傍を含むものである。
【0007】
また、ハンドルは、側壁の互いに対向する周縁部分に固定されていることが好ましい。このように、ハンドルの固定位置が側壁の互いに対向する周縁部分に設けられているので、容器本体の変形を一層低減させることができる。
【0008】
また、ハンドルは、作業者によって握られるグリップと、グリップの両端部から連続して形成され、側壁の周縁部に形成された被係合部に係合可能な係合部とを備えることが好ましい。
【0009】
また、グリップの長手方向の中心は、容器本体の重心より開口部側に配置されていることが好ましい。これにより、作業者がグリップを握って基板収納容器を持ち上げた際に、容器本体の重心がグリップの中心より後方に配置されるため、安定的に保持することができると共に、容器本体の開口部側が上方へ向き易くなるため、容器本体内の基板が開口部から落下する虞が低減される。
【0010】
また、係合部又は被係合部の何れか一方は、係止爪を備え、他方は、係止爪が係止される係止穴を備えていることが好ましい。これにより、係止爪を係止穴に係止させることで、ハンドルを容器本体に確実に固定することができる。なお、「係止穴」は、貫通孔、凹部を含み、その形状は限定されない。係止穴は、係止爪を係止可能であればよい。
【0011】
また、ハンドルは、側壁の周縁部分に沿って固定され、周縁部分から外方に突出する把持部を有していることが好ましい。これにより、ハンドルを簡素な構造とし、容器本体の変形を低減することができる。
【0012】
本発明による基板収納容器のハンドルは、開口部を有し基板を収納する基板収納容器の容器本体の側壁に取り付けられるハンドルにおいて、作業者によって握られるグリップと、グリップの両端部に接続され、側壁の互いに対向する周縁部分に形成された被係合部に係合可能な係合部とを備えることを特徴としている。
【0013】
このような基板収納容器のハンドルによれば、容器本体の側壁の互いに対向する周縁部分に取り付け可能な構成とされている。容器本体の側壁の周縁部分は、側壁面より剛性が高く変形し辛いので、側壁の周縁部分に固定可能な構成とすることで、ハンドルを容器本体に固定して使用した際に、容器本体の変形を低減することができる。これにより、容器本体と容器本体内の基板との擦れを防止して、パーティクルの発生を抑制することができる。また、容器本体の変形が低減されるので、容器本体内の基板を位置精度良く保持することができる。また、側壁の互いに対向する周縁部分にハンドルを固定可能な構成とされているので、ハンドルを容器本体に固定していて使用した際に、作業者は基板収納容器を安定して保持することができる。なお、「周縁部分」とは、周縁及びその近傍を含むものである。
【発明の効果】
【0014】
本発明の基板収納容器及びそのハンドルによれば、容器本体の変形を低減することができるため、容器本体内の基板と容器本体との擦れを抑制してパーティクルの発生を防止すると共に、基板を位置精度良く保持することができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明による基板収納容器及びそのハンドルの好適な実施形態について図面を参照しながら説明する。なお、図面の説明において、同一または相当要素には同一の符号を付し、重複する説明は省略する。図1は、本発明の実施形態に係る基板収納容器を背面側から示す分解斜視図、図2は、本発明の実施形態に係る基板収納容器を背面側から示す斜視図、図3は、本発明の実施形態に係る基板収納容器の横断面図である。
【0016】
図1〜図3に示す基板収納容器1は、基板Wを1又は複数枚(例えば6,13,25枚)収容し、輸送、搬送、保管などに使用される収納容器である。この基板収納容器1は、基板Wを収容する容器本体2、この容器本体2に設けられた開口部3を閉鎖する蓋体4を備えている。容器本体2は、基板Wを整列収納可能な構成とされている。蓋体4には、容器本体2の開口部3の対向する一対の周縁に係止される係止機構が設置されている。容器本体2の開口部3に蓋体4が装着され、基板収納容器1内は密閉状態となる。また、蓋体4の背面側(基板収納容器の内面)には、複数の基板Wを上下方向に水平に並べて支持するリテーナ8が取り付けられている。
【0017】
基板収納容器1のうち、容器本体2、蓋体4、位置決め部(不図示)、ロボティックフランジ7、及びハンドル10は、例えば、熱可塑性樹脂やこれらのアロイによって形成され、熱可塑性樹脂としては、ポリカーボネート、シクロオレフィンポリマー、ポリエーテルイミド、ポリエーテルサルフォン、ポリエーテルケトン、ポリブチレンテレフタレート、ポリエーテルエーテルケトン、液晶ポリマー、環状オレフィン樹脂等が挙げられる。また、熱可塑性樹脂に、導電剤や各種帯電防止剤を添加しても良い。導電剤としては、カーボンブラック、アセチレンブラック、炭素繊維、カーボンナノチューブ、金属繊維、金属酸化物、導電性ポリマー等が挙げられる。帯電防止剤としては、アニオン系、カチオン系、非イオン系等の帯電防止剤が挙げられる。
【0018】
また、熱可塑性樹脂に紫外線吸収剤を添加しても良く、紫外線吸収剤としては、ベンゾトリアゾール系、サリシレート系、シアノアクリレート系、オキザリックアシッドアニリド系、ビンダードアミン系等の紫外線吸収剤が挙げられる。また、剛性を高めるための添加剤を熱可塑性樹脂に添加しても良く、例えば、ガラス繊維、炭素繊維等が挙げられる。
【0019】
また、基板収納容器1は、セラミックや、例えばジュラルミン、チタン合金等の金属材料によって形成することができる。このようにして、基板収納容器1の軽量化を図っても良い。
【0020】
基板収納容器1内に収容される基板Wは、例えば直径300mmの円盤状のシリコンウェーハからなり、表裏両面がそれぞれ鏡面加工されている。基板Wは、専用のロボットにより左右の側部周縁がハンドリングされた状態で、容器本体2内に出し入れされる。基板Wの周縁には、結晶方向の判別や整列を容易にするノッチが形成されている。このノッチは、平面視において、例えば半円形状を成している。
【0021】
容器本体2は、透明性や高剛性に優れるポリカーボネート等の所定の樹脂を用いて成形されている。容器本体2は、正面に開口したフロントオープンボックスタイプであり、容器本体2の両側壁21には、基板Wを水平に支持するティース106が各々形成されている。このティース106は、図示上下方向に所定のピッチで複数配列され、このティース106によって、基板Wが水平状態で上下方向に並べて整列収納される。
【0022】
各ティース106は、基板Wを支持可能な構成であればよく、その形状は限定されない。ティース106の形状としては、例えば、平面視において、長方形、「く」の字形、半円弧形状等が挙げられる。ティース106は、基板Wの周縁に沿うように形成された棚部と、この棚部上に形成され、基板Wと接触する平坦面を有する基板接触部101,103とを備えている。ここで、棚部及び基板接触部を図3にあるように開口部3側と背面側とに分割して設け、これらの中間部に通常は基板Wと接触しない補助支持部104を設けることができる。補助支持部104は、基板接触部101,103よりも低い位置に設けられ、基板Wの挿入時に隣接する基板接触部101へ挿入されること(クロススロット)を防止している。
【0023】
また、ティース106の開口部3側には、基板Wの位置を規制する位置規制用段差102が形成されている。この位置規制用段差102と、容器本体2の奥側(開口部と反対側)で基板Wの形状に沿って形成された基板接触部103の壁面部分105とによって、容器本体2内の基板Wの前後方向の動きを規制することができる(なお、正面側を「前」、背面側を「後」とする)。上記した実施形態の補助支持部104を設けず、開口部3側の基板接触部と、背面側の基板接触部の2箇所だけにして両者の中間部には、空間をあけておくこともできる。
【0024】
このような構成のティース106は、容器本体2とは別部品として形成され、容器本体2を成形する時にインサートされて容器本体と一体的に設けられたり、熱溶着、摩擦係合、螺刻部品等を利用して固定することができる。図13は、ティースの他の例を示す横断面図である。図13に示すように、ティース6は、平面視において、背面側が「く」の字形に屈曲した長方形状とした開口部から連続する棚部となるように容器本体2に一体に形成しても良い。この場合も、棚部は、基板接触部6bと基板の前後方向の位置規制を行う領域6a、6cを有し、基板を水平に支持可能となる。このようなティース6,106によって、基板Wは、容器本体2内において、高精度に位置決めされて支持されている。そのため、基板Wが上下方向に傾斜することが防止され、基板Wを取り出すためのフォークが容器本体2内へ容易に挿入される。
【0025】
容器本体2の底板(底部)の外面には、所定の装置(例えば基板を加工する加工装置等)に対して位置決めを行うための位置決め部が形成されている。位置決め部は、3箇所に設置され、Y字形に配置されている。また、位置決め部には、V字溝(凹部)が形成されている。また、位置決め部の断面形状は、V字形に限定されず、例えば、M字形、逆V字形、逆Y字形あるいは凹んだ小判形等に形成される。
【0026】
容器本体2の天板22の外面には、平面視において矩形状を成すロボティックフランジ7が形成されている。このロボティックフランジ7は、容器本体2と一体的に形成されたものでもよく、別部品として形成され、容器本体2に対して着脱可能な構成とされたものでもよい。基板収納容器1は、ロボティックフランジ7がOHT(オーバーヘッドホイストトランスファー)と呼ばれる図示しない自動搬送機構によって保持されて、工場内を搬送される。
【0027】
ここで、基板収納容器1は、容器本体2の対向する一対の側壁21,21に設けられた一対のハンドル10を備え、このハンドル10は容器本体2の側壁21の周縁部分に固定されている。具体的には側壁21の対向する周縁部分であるコーナー部分(稜線部分)21a,21bに着脱可能に固定されている。ハンドル10の固定位置として、コーナー部分21a,21bには、ハンドル10を係合するための被係合部23,24が設置されている。
【0028】
また、ハンドル10の側壁21への固定位置は、側壁21の中央を挟んで互いに対向するコーナー部分21a、21bに配置されることが好ましい。例えば、側壁21の対角線に沿うようにハンドル10が配置され、ハンドル10の固定位置は側壁10の対角に配置されることがより好ましい。また、両側壁21に固定される一対のハンドルは、対称形に配置されることが好ましい。
【0029】
ハンドル10は、作業者によって握られるグリップ11と、このグリップ11の両端部11a,11bから互いに反対方向に連続して形成された湾曲部12,13と、湾曲部12,13の端部に設けられ、被係合部23,24に係合可能な係合部14,15とを備えている。
【0030】
グリップ11は、例えば一定太さの棒状でもよく、長手方向の中心11cの外周が最も太くなるように異なる太さの棒状でもよく、人間工学的に握り易い形状とすることが好ましい。また、グリップ11の長手方向の両端部11a,11bには、外方に突出するフランジ又はリブを設けるようにしてもよい。グリップ11は、ハンドル10を容器本体2に取り付けた状態において、長手方向が傾斜して配置されることが好ましい。具体的には、グリップ11の前側の端部11aが上方に向けられ、グリップ11の後側の端部11bが下方に向けられて配置される。
【0031】
湾曲部12は、グリップ11の端部11aから上方へ湾曲し、湾曲部13は、グリップ11の端部11bから水平方向へ湾曲し、その後部側で下方に湾曲すると共に内方(容器本体2の側壁21側)へ湾曲している。グリップ11は、ハンドル10が容器本体2に取り付けられた状態において、側壁21と所定間隔離間して配置され、作業者が握り易い位置に配置されている。
【0032】
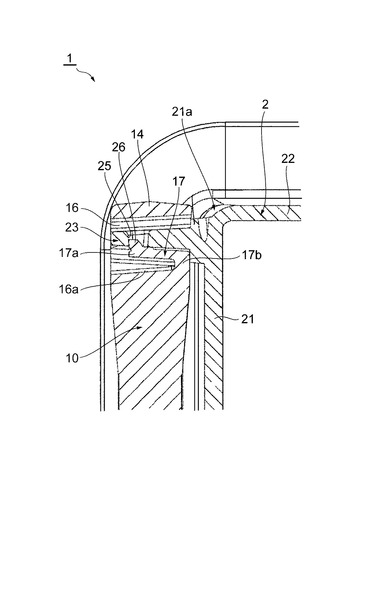
図4は、図1中の被係合部を拡大して示す斜視図である。なお、図4では、被係合部23を示しているが、被係合部24も同様の構成である。被係合部23は、容器本体2の側壁21と天板22との間のコーナー部分21aに設置され、被係合部24は、容器本体2の側壁21と底板との間のコーナー部分21bに設置されている。被係合部23,24は、板状を成し、容器本体2から外方に突出し、被係合部23,24には、係合部14,15の係止爪26(図5参照)を係止する係止穴25が形成されている。また、係止穴25の径は、上下方向において、異なる大きさとされ、図8に示すように、被係合部23では、下部側の径が上部側の径より小さくされ、係止爪26は、被係合部23の下部側から挿入されて、係止穴25の内壁面に係止される。なお、図示していないが、被係合部24は、被係合部23と上下方向が逆に形成され、上部側の径が下部側の径より小さくされ、係合部15の係止爪26は、被係合部24の上部側から挿入されて、被係合部24の係止穴25の内壁面に係止される。
【0033】
図5は、図1中の係合部を拡大して示す斜視図、図6〜図9は、係合部及び被係合部の係合状態を示す各図である。図5〜図9では、係合部14,15のうち、係合部14のみを示しているが、係合部15も係合部14と同様の構成である。係合部14,15には、被係合部23,24を挿入するための開口部16が形成されている。この開口部16は、側面視において、被係合部23,24に対応する大きさとされた幅広部分16aを有し、この幅広部分16aの上下方向の両側には、幅広部分16aより径が小さくされた幅狭部分16bが形成されている。そして、被係合部23,24は、開口部16内に挿入される。
【0034】
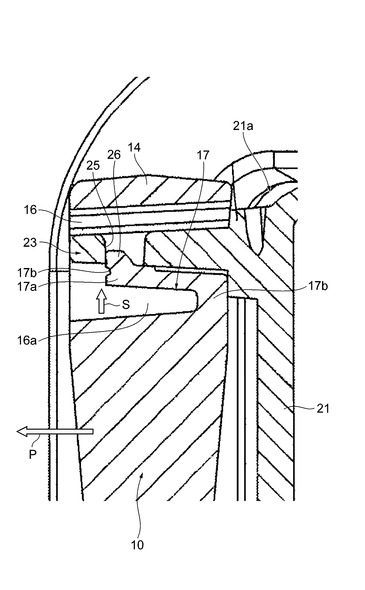
また、係合部14,15は、図8及び図9に示すように、開口部16内に形成された弾性片17を有し、この弾性片17の先端部(側壁21とは反対側の端部)17aには被係合部23,24の係止穴25に係止される係止爪26が形成されている。弾性片17の基端部17b(側壁21側の端部)は、開口部16の湾曲部12側の内壁面16aから突出し、側壁21とは反対方向へ屈曲されている。弾性片17は弾性を有し、先端部17aに形成された係止爪26が係止穴25の傾斜面と接触するように係止される。係止穴25の傾斜面は、図9において、上部側が外方に倒れるように傾斜している。また、係止爪26には、係止穴25の傾斜面に対応して、上部側が外方に倒れるように傾斜面が形成されている。
【0035】
このように係止穴25及び係止爪26に傾斜面が形成されているので、係合状態において、ハンドル10を外す方向の外力P(図9参照)を受けた場合に、係止爪26は傾斜面に沿って、図示S方向に移動することとなり、係止爪26が係止穴25から外れることを効果的に防止することができる。
【0036】
また、弾性片17の先端には外部に露呈した凹部である被操作部17bが形成されている(なお、被操作部は、凹部に代えて凸部でもよい)。容器本体2に取り付けられたハンドル10を取外す際には、被操作部17bを押し下げて、係止爪26を係止穴25から外すことで、ハンドル10と容器本体2とを分離することができる。例えば、被操作部17bに係合する先端を有する専用の治具を準備し、この治具を用いて容易にハンドル10を取外すことができる。
【0037】
そして、ハンドル10を容器本体2に取り付ける際には、係合部14を被係合部23に対応する位置に配置し、係合部15を被係合部24に対応する位置に配置して、ハンドル10を押し込むことで、容器本体2容易に取り付けることができる。
【0038】
ハンドル10は、図3に示すように、容器本体2に取り付けられた状態において、グリップ11の長手方向の中心11cが、容器本体2の重心より開口部3側に配置されている。例えば、グリップ11の中心11cは、容器本体2の重心2aよりも開口部3側(蓋体4側)に約10mm程度ずらして配置されている。これにより、蓋体4を装着していない状態で、容器本体2を持ち上げたとしても、容器本体2の後方側が下方に下がり、開口部3が上方に向くので、誤って基板Wが開口部3から容器本体2外へ飛び出すことが防止される。
【0039】
このような基板収納容器1では、ハンドル10の固定位置である被係合部23,24が、容器本体2の側壁21のコーナー部分21a,21bに設けられている。容器本体2の側壁21のコーナー部分21a,21bは、側壁21より剛性が高く変形し辛いので、コーナー部分21a,21bにハンドル10の固定位置を設けることで、容器本体2の変形が低減されている。そのため、作業者がハンドル10を握って、容器本体2を持ち上げた際の容器本体2の変形が低減される。
【0040】
このように基板収納容器1では、容器本体2の変形が低減されるため、容器本体2と内部に収容された基板Wとの擦れを防止して、パーティクルの発生を抑制することができる。また、容器本体2の変形が低減されるため、基板Wの容器本体2内における位置精度が安定し、基板Wを位置精度良く容器本体2内で保持することができる。そのため、容器本体2内に収容された基板Wを位置精度良く取り出すことができ、取り出しエラーを防止することができる。
【0041】
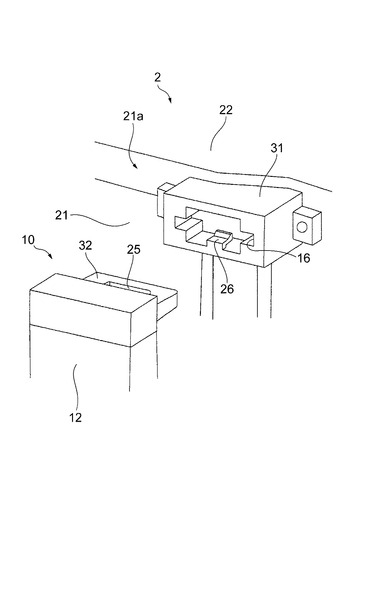
次に、係合部及び被係合部の他の形態について、図10を参照して説明する。図10は、係合部及び被係合部の他の形態を示す分解斜視図である。図10に示す他の形態が、上記実施形態と違う点は、容器本体2に、係止爪26が形成された被係合部31を備え、ハンドル10に、係止穴25を備えた係合部32を備える点である。このような構成の係合部31及び被係合部32であってもよい。本実施形態のハンドルには、一部分又は全領域に凹凸リブを交互に設けたり、表面の一部分又は全領域に、皮、織布、木目、砂目などのパターンのシボを加工して、汚れの付着を防止したり、滑り止め効果を出すことができる。
【0042】
以上、本発明をその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。上記実施形態において、本発明の基板収納容器を、半導体ウェーハを収納するものとして説明しているが、収納物される基板は、半導体ウェーハに限定されず、マスクガラスを始めとしたその他の精密基板でもよい。また、収容される基板の大きさは、300mmに限定されず、例えば450mm等その他の大きさでもよい。また、収納枚数も1〜25枚に限らず26枚以上であっても良い。
【0043】
また、ハンドルの形状は、上記実施形態に限定されず、その形状は、任意の形状でよい。ハンドルの固定位置が側壁の互いに対向する周縁部分に配置されていればよい。
【0044】
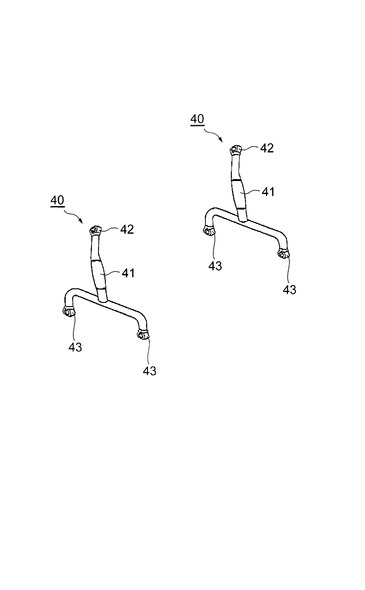
図11は、本発明のハンドルの別の実施形態を示す斜視図である。図11に示すハンドル40は、側面視において逆Y字状に形成され、上下方向に延在するグリップ41を有している。また、容器本体2の稜線部(コーナー部分)への固定部(係合部)42,43が、天板側に1箇所(42)、底板側に2箇所(43)、合計3箇所に形成されている。固定方法は、上記した実施形態と同じ係止構造でも良く、別の係止構造を組み合わせて用いても良い。このように3箇所以上で固定することで、容器本体に固定されるハンドル40のねじれや撓みを防止することができる。その結果、作業者が基板収納容器を持ち上げる際に、安定して保持することができる。
【0045】
また、上記実施形態では、グリップの長手方向が上下方向に傾斜して配置されているが、グリップの長手方向が傾斜して配置されていなくても良い。例えば、グリップ部が円形や多角形状に形成されていて、表面に指がはまり込むような凹凸が形成されたものでもよく、グリップ部が容器の底板と平行でもよく、垂直でもよい。
【0046】
また、上記実施形態では、ハンドルが容器本体2に対して着脱可能な構成とされているが、ハンドルは、容器本体から取外しできないように固定されていてもよい。
【0047】
また、上記実施形態では、グリップの長手方向の中心が、平面視において、容器本体2の重心よりも前方に配置されているが、グリップの長手方向の中心が、容器本体2の重心と同じ位置や、容器本体2の重心より後方に配置されていてもよい。なお、グリップを握って容器本体2を持ち上げた際に、開口部3が上向きと成りやすくするには、上記実施形態のように、グリップの長手方向を傾斜させると共に、グリップの中心を容器本体2の重心よりも、前方に配置させると良い。
【0048】
なお、グリップは作業者によって握られなくてもよい。例えば、ロボット、その他の機械等にグリップを握らせて、容器本体を持ち上げてもよい。
【0049】
また、上記実施形態では、フロントオープンタイプの容器本体に、ハンドルを取り付けているが、例えば開口部が容器本体の天板に形成されたトップオープンタイプのものに、ハンドルを取り付けてもよい。
【0050】
図12は、さらに別の形態のハンドルを備えた基板収納容器を示す斜視図である。この別の形態のハンドル50では、容器本体2の天板22側の稜線部(コーナー部分)21aから、側壁21の外方に突出する把持部51が容器本体2と一体的に形成されている。
【0051】
このハンドル50は、容器本体2の側壁21の外面に固定されたプレート部52を有している。把持部51は、プレート部52の上端部52aで屈曲されて、外方に突出している。プレート部52の上端部52aは、容器本体2の天板22側の稜線部21aに沿って固定され、把持部51は、稜線部21aから外方に突出している。このように、ハンドル50の把持部51が側壁21の稜線部21aから外方に突出しているので、ハンドル50の構造を簡素とすると共に、ハンドル50を握って容器本体2を保持する際の容器本体2の変形を低減することができる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施形態に係る基板収納容器を背面側から示す分解斜視図である。
【図2】本発明の実施形態に係る基板収納容器を背面側から示す斜視図である。
【図3】本発明の実施形態に係る基板収納容器の横断面図である。
【図4】図1中の被係合部を拡大して示す斜視図である。
【図5】図1中の係合部を拡大して示す斜視図である。
【図6】係合部及び被係合部の係合状態を示す斜視図である。
【図7】係合部及び被係合部の係合状態を示す側面図である。
【図8】係合部及び被係合部の係合状態を示す縦断面図である。
【図9】係合部及び被係合部の係合状態を拡大して示す横断面図である。
【図10】係合部及び被係合部の他の形態を示す分解斜視図である。
【図11】本発明のハンドルの別の実施形態を示す斜視図である。
【図12】さらに別の形態のハンドルを備えた基板収納容器を示す斜視図である。
【図13】ティースの他の例を示す横断面図である。
【符号の説明】
【0053】
1…基板収納容器、2…容器本体、2a…容器本体の重心、3…開口部、4…蓋体、10,40,50…ハンドル、11,41…グリップ、11a,11b…グリップの端部、11c…グリップの中心、12,13…湾曲部、14,15,32,42,43…係合部、21…側壁、21a,21b…コーナー部分、23,24,31…被係合部、25…係止穴、26…係止爪、51…把持部。
【特許請求の範囲】
【請求項1】
開口部を有し基板を収納する容器本体と、前記開口部を閉鎖する蓋体とを備えた基板収納容器において、
前記容器本体の対向する一対の側壁に設けられた一対のハンドルを備え、
前記ハンドルは、前記側壁の周縁部分に固定されていることを特徴とする基板収納容器。
【請求項2】
前記ハンドルは、前記側壁の互いに対向する周縁部分に固定されていることを特徴とする請求項1記載の基板収納容器。
【請求項3】
前記ハンドルは、作業者によって握られるグリップと、
前記グリップの両端部から連続して形成され、前記側壁の前記周縁部に形成された被係合部に係合可能な係合部とを備えることを特徴とする請求項1又は2記載の基板収納容器。
【請求項4】
前記グリップの長手方向の中心は、前記容器本体の重心より前記開口部側に配置されていることを特徴とする請求項3記載の基板収納容器。
【請求項5】
前記係合部又は前記被係合部の何れか一方は、係止爪を備え、他方は、前記係止爪が係止される係止穴を備えていることを特徴とする請求項3又は4記載の基板収納容器。
【請求項6】
前記ハンドルは、前記側壁の周縁部分に沿って固定され、前記周縁部分から外方に突出する把持部を有していることを特徴とする請求項1記載の基板収納容器。
【請求項7】
開口部を有し基板を収納する基板収納容器の容器本体の側壁に取り付けられるハンドルにおいて、
作業者によって握られるグリップと、
前記グリップの両端部に接続され、前記側壁の互いに対向する前記周縁部分に形成された被係合部に係合可能な係合部とを備えることを特徴とする基板収納容器のハンドル。
【請求項1】
開口部を有し基板を収納する容器本体と、前記開口部を閉鎖する蓋体とを備えた基板収納容器において、
前記容器本体の対向する一対の側壁に設けられた一対のハンドルを備え、
前記ハンドルは、前記側壁の周縁部分に固定されていることを特徴とする基板収納容器。
【請求項2】
前記ハンドルは、前記側壁の互いに対向する周縁部分に固定されていることを特徴とする請求項1記載の基板収納容器。
【請求項3】
前記ハンドルは、作業者によって握られるグリップと、
前記グリップの両端部から連続して形成され、前記側壁の前記周縁部に形成された被係合部に係合可能な係合部とを備えることを特徴とする請求項1又は2記載の基板収納容器。
【請求項4】
前記グリップの長手方向の中心は、前記容器本体の重心より前記開口部側に配置されていることを特徴とする請求項3記載の基板収納容器。
【請求項5】
前記係合部又は前記被係合部の何れか一方は、係止爪を備え、他方は、前記係止爪が係止される係止穴を備えていることを特徴とする請求項3又は4記載の基板収納容器。
【請求項6】
前記ハンドルは、前記側壁の周縁部分に沿って固定され、前記周縁部分から外方に突出する把持部を有していることを特徴とする請求項1記載の基板収納容器。
【請求項7】
開口部を有し基板を収納する基板収納容器の容器本体の側壁に取り付けられるハンドルにおいて、
作業者によって握られるグリップと、
前記グリップの両端部に接続され、前記側壁の互いに対向する前記周縁部分に形成された被係合部に係合可能な係合部とを備えることを特徴とする基板収納容器のハンドル。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2008−270281(P2008−270281A)
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願番号】特願2007−107383(P2007−107383)
【出願日】平成19年4月16日(2007.4.16)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願日】平成19年4月16日(2007.4.16)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
[ Back to top ]