
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法に関する。搬送対象または処理対象の基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、セラミック基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
半導体基板や液晶表示装置用基板に代表される基板を処理する基板処理装置は、処理対象の基板を搬送する基板搬送装置を備えている。基板搬送装置は、基板を保持するハンドと、ハンドを移動させるハンド駆動機構とを備えている。ハンド駆動機構は、たとえば、複数のアーム部を結合した多関節アームと、この多関節アームに駆動力を与えるモータとを含む。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−152490号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
単位時間当たりの基板処理枚数を増やすために基板搬送速度を高めるには、ハンドを高速に移動させなければならない。したがって、移動開始時および停止時には、ハンドおよびそれに保持された基板に大きな加速度が生じ、それに応じて、大きな慣性力が働く。この大きな慣性力のために、移動開始時に遅れが生じ、かつ停止時にはハンドが振動する。とくに、多関節アームを伸張した状態では、ハンドが多関節アームの回動支点(回動軸)から大きく離れているため、大きな振動が生じやすく、かつその振動が収束しにくい。
【0005】
また、多関節アームを伸張させた状態では、多関節アームおよびハンドの自重のために、ハンドが垂れ下がり、基板を水平に保持することができない。この問題は、多関節アームの構成部材の剛性を高めることによって解決できるかもしれないが、コスト高となるうえ、重量が増すので、それに応じて高速駆動が困難になる。
そこで、この発明の目的は、基板の高速搬送に適した基板搬送装置およびそれを用いた基板処理装置を提供することである。また、この発明の他の目的は、基板の高速搬送に適した基板搬送方法を提供することである。
【課題を解決するための手段】
【0006】
上記の目的を達成するための請求項1記載の発明は、基板を保持するハンド(23)と、前記ハンドを駆動するハンド駆動機構(20,26,27,28,31,32,16,17)と、前記ハンドに備えられ、前記ハンドの動作を補助するように気体を噴射する気体ノズル(51〜55,91〜93,101〜103)とを含む、基板搬送装置である。なお、括弧内の英数字は後述の実施形態における対応構成要素等を表すが、特許請求の範囲を実施形態に限定する趣旨ではない。以下、この項において同じ。
【0007】
この構成によれば、ハンドに備えられた気体ノズルから気体を噴射することによって、その噴射による反力がハンドに加わり、それによって、ハンドの動作が補助される。すなわち、ハンドに加わる反力により、ハンドの動きを加速したり、ハンドの動きを減速したり、ハンドの姿勢を変化させたりすることができる。したがって、ハンドに働く慣性力等を気体ノズルからの気体噴射により生じる反力によって打ち消すことができるので、ハンド駆動機構の剛性を高めなくても、ハンドを高速移動させるときの加速および減速を、遅れや振動を抑制して円滑に行える。
【0008】
請求項2記載の発明は、前記気体ノズルが、前記ハンドの動作を加速するように気体を噴射する加速ノズル(51〜55,91〜93,101〜103)を含む、請求項1に記載の基板搬送装置である。この構成により、ハンドを速やかに加速することができるので、ハンドの動作速度が速やかに最高速に達する。これにより、基板を高速搬送できる。加速ノズルは、ハンドの動作方向と正反対の方向に気体を噴射するように構成されていることが好ましい。これにより、気体の噴射による反力がハンドの動作方向に作用するので、ハンドを効果的に加速できる。
【0009】
請求項3記載の発明は、前記気体ノズルが、前記ハンドの動作を制動するように気体を噴射する制動ノズル(51〜55,91〜93,101〜103)を含む、請求項1または2に記載の基板搬送装置である。この構成によれば、ハンドを速やかに減速することができるので、速やかにハンドを停止させることができ、停止時のハンドの振動を抑制できる。これにより、基板の高速搬送に寄与できる。制動ノズルは、ハンドの動作方向に気体を噴射するように構成されていることが好ましい。これにより、気体の噴射による反力がハンドの動作方向と正反対の方向に作用するので、効果的にハンドを制動できる。
【0010】
請求項4記載の発明は、前記気体ノズルが、水平面に沿う方向に気体を噴射する水平方向ノズル(51〜54,91,92,101,102)を含む、請求項1〜3のいずれか一項に記載の基板搬送装置である。この構成により、水平方向ノズルにより気体を噴射したときに水平方向の反力が生じ、この反力がハンドに作用する。これにより、ハンドの水平方向動作(とくに加速または減速)を効率的に補助することができる。
【0011】
請求項5記載の発明は、前記気体ノズルが、下向きに気体を噴射する抗重力ノズル(55,93,103)を含む、請求項1〜4のいずれか一項に記載の基板搬送装置である。この構成によれば、抗重力ノズルからの気体の噴射による反力によって、重力に抗してハンドを持ち上げることができる。これにより、ハンドが上方に移動開始するときの加速動作を補助したり、ハンドが下方に移動して停止するときの減速動作を補助したりすることができる。
【0012】
また、たとえば、長いアームの先端にハンドが取り付けられている場合、ハンド等の自重のために、アームが曲がり、ハンドの高さが低くなったり、ハンドの姿勢が傾斜(その結果、たとえばハンドに保持された基板が水平面に対して傾斜)したりするおそれがある。そこで、抗重力ノズルから気体を噴射してハンドに対して上向きの力を作用させることによって、ハンドを持ち上げたり、その姿勢を矯正したりすることができる。より具体的には、たとえば、水平方向に屈伸する多関節アームの先端にハンドが取り付けられている場合に、多関節アームを伸張させたときのハンドの垂れ下がりを抑制できる。これにより、ハンドを水平面に沿って移動させることができ、かつハンドの姿勢を保持(その結果、たとえば基板を水平姿勢に保持)できる。
【0013】
前記抗重力ノズルは、ハンドに取り付けられていることが好ましい。これにより、ハンドの姿勢を効率的に矯正できる。
請求項6記載の発明は、前記ハンドの加速度を検出する加速度検出手段(56,94,104)と、前記加速度検出手段によって検出される加速度に応じて前記気体ノズルからの気体の噴射を制御する噴射制御手段(60)とをさらに含む、請求項1〜5のいずれか一項に記載の基板搬送装置である。この構成により、ハンドの加速度(すなわち、その加速度によって生じる慣性力)に応じて、ハンドの動作を補助するように気体ノズルによる気体の噴射が行われる。したがって、ハンドの動作を適切に補助することができる。より具体的には、前記噴射制御手段は、前記加速度検出手段の出力に基づいて前記気体ノズルからの気体の噴射(たとえば噴射量)をフィードバック制御するように構成(プログラム)されていてもよい。
【0014】
請求項7記載の発明は、前記ハンド駆動機構は、互いに回動可能に結合された複数のアーム部(21,22)を有する多関節アーム(20)を備え、前記ハンドが、前記多関節アームに結合されており、前記複数のアーム部の少なくとも一つに備えられ、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ノズル(71,72,81,82)をさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置である。
【0015】
この構成によれば、多関節アームを構成するアーム部の動作が、アーム動作補助ノズルからの気体噴射によって得られる反力によって補助される。したがって、ハンドだけでなくアーム部の動作も補助されるので、より高速な基板搬送が可能になり、かつ停止時等の振動も一層抑制される。また、多関節アームの剛性を高めることなく高速搬送が可能なので、コストの大幅な増加を伴うこともなく、かつ、重量が大幅に増加することもない。
【0016】
前記アーム動作補助ノズルは、アーム部の先端部に設けられることが好ましい。さらに、前記アーム動作補助ノズルは、前記アーム部の先端部の回動経路上における各位置での接線方向(回動経路の接線方向)に平行な方向に気体を噴射するように構成されていることが好ましい。前記アーム動作補助ノズルは、アーム部の先端部の動作を加速するアーム加速ノズル(71,72,81,82)を含むことが好ましい。また、前記アーム動作補助ノズルは、アーム部の先端部の動作を制動するアーム制動ノズル(71,72,81,82)を含むことが好ましい。
【0017】
請求項8記載の発明は、前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部(15)と、前記基台部に備えられ、当該基台部の動作を補助するように気体を噴射する基台部動作補助ノズル(107,108)とをさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置である。
この構成により、基台部動作補助ノズルからの気体の噴射により得られる反力によって、基台部の動作を補助できる。したがって、基台部の加速および/または減速を速やかに行うことができるから、基台部の動作開始時に最高速に達するまでの時間を短縮でき、かつ基台部を短時間で停止させることができる。これによって、基板の高速搬送に寄与できる。前記基台部動作補助ノズルは、基台部の走行方向(搬送経路)に平行な方向に気体を噴射するように構成されていることが好ましい。より具体的には、基台部動作補助ノズルは、基台部の走行方向とは反対方向に気体を噴射して基台部を加速する基台部加速ノズル、および/または基台部の走行方向に気体を噴射して基台部を制動する基台部制動ノズルを含むことが好ましい。
【0018】
請求項9記載の発明は、請求項1〜8のいずれか一項に記載の基板搬送装置(7)と、前記基板搬送装置によって搬送される基板を処理する処理ユニット(3)とを含む、基板処理装置である。この構成により、基板の搬送速度を高めることができるので、基板処理速度を高めることができ、その結果、基板を用いた製品の生産性を高めることができる。
請求項10記載の発明は、基板を保持するハンドをハンド駆動機構によって駆動するステップと、前記ハンドに備えられた気体ノズルから気体を噴射して、前記ハンドの動作を補助する気体噴射ステップとを含む、基板搬送方法である。この方法により、請求項1の発明と同様の作用効果を実現できる。
【0019】
請求項11記載の発明は、前記気体噴射ステップが、前記ハンドの動作を加速するように前記気体ノズルから気体を噴射する加速ステップを含む、請求項10に記載の基板搬送方法である。この方法により、請求項2の発明と同様の作用効果を実現できる。
請求項12記載の発明は、前記気体噴射ステップが、前記ハンドの動作を制動するように前記気体ノズルから気体を噴射する制動ステップを含む、請求項10または11に記載の基板搬送方法である。この方法により、請求項3の発明と同様の作用効果を実現できる。
【0020】
請求項13記載の発明は、前記気体噴射ステップが、前記気体ノズルから水平面に沿う方向に気体を噴射する水平方向噴射ステップを含む、請求項10〜12のいずれか一項に記載の基板搬送方法である。この方法により、請求項4の発明と同様の作用効果を実現できる。
請求項14記載の発明は、前記気体噴射ステップが、前記気体ノズルから下向きに気体を噴射する抗重力噴射ステップを含む、請求項10〜13のいずれか一項に記載の基板搬送方法である。この方法により、請求項5の発明と同様の作用効果を実現できる。
【0021】
請求項15記載の発明は、前記ハンドの加速度を検出する加速度検出ステップをさらに含み、前記気体噴射ステップが、前記加速度検出ステップによって検出される加速度に応じて前記気体ノズルから気体を噴射するステップを含む、請求項10〜14のいずれか一項に記載の基板搬送方法である。この方法により、請求項6の発明と同様の作用効果を実現できる。
【0022】
請求項16記載の発明は、前記ハンド駆動機構が、互いに回動可能に結合された複数のアーム部を有する多関節アームを備え、前記ハンドが、前記多関節アームに結合されており、前記複数のアーム部の少なくとも一つに備えられたアーム動作補助ノズルから、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ステップをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法である。この方法により、請求項7の発明と同様の作用効果を実現できる。
【0023】
請求項17記載の発明は、前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部に備えられた基台部動作補助ノズルから、当該基台部の動作を補助するように気体を噴射する基台部動作補助ステップとをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法である。この方法により、請求項8の発明と同様の作用効果を実現できる。
【図面の簡単な説明】
【0024】
【図1】図1は、この発明の一実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。
【図2】図2Aはインデクサロボットの図解的な側面図であり、図2Bはインデクサロボット7の図解的な平面図である。
【図3】図3は、動作補助ユニットの構成を図解した拡大図である。
【図4】図4は、多関節アームを伸張させたときの撓みを説明するための図である。
【図5】図5は、インデクサロボットの動作制御に関連する構成を示すブロック図である。
【図6】図6は、インデクサロボットの制御に関するコントローラの制御ブロック図である。
【図7】図7Aは、この発明の第2の実施形態に係るインデクサロボットを説明するための図解的な側面図であり、図7Bは、その図解的な平面図である。
【図8】図8は、前記第2の実施形態に係るインデクサロボットの動作制御に関連する構成を示すブロック図である。
【図9】図9は、インデクサロボットの制御に関するコントローラの制御ブロック図である。
【図10】図10Aは、この発明の第3の実施形態に係るインデクサロボットの構成を説明するための図解的な斜視図であり、図10Bは、ハンドの下方から見た斜視図である。
【図11】図11は、前記第3の実施形態に係るインデクサロボットの動作制御に関連する構成を示すブロック図である。
【図12】図12は、インデクサロボットの制御に関するコントローラの制御ブロック図である。
【図13】図13は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第4の実施形態)である。
【図14】図14は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第5の実施形態)である。
【発明を実施するための形態】
【0025】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
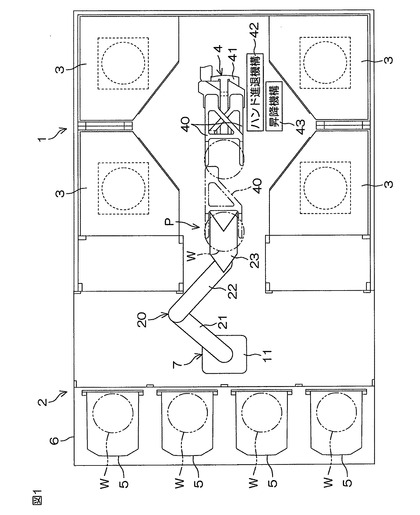
図1は、この発明の一実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。この基板処理装置は、半導体ウエハや液晶表示パネル用ガラス基板等の基板Wを処理するための装置である。この基板処理装置は、基板処理モジュール1と、この基板処理モジュール1に結合されたインデクサモジュール2とを備えている。
【0026】
基板処理モジュール1は、平面的に配列された4つの処理ユニット3と、この4つの処理ユニット3に取り囲まれるように中央に配置された主搬送ロボット4とを備えている。主搬送ロボット4は、処理ユニット3に対して、未処理の基板Wを搬入し、処理済の基板Wを処理ユニット3から搬出するための搬入/搬出動作を行う。
一方、インデクサモジュール2は、複数枚の基板Wを収容することができるカセット5が載置されるカセット載置台6と、このカセット載置台6に置かれたカセット5にアクセスして基板の搬入/搬出を行い、さらに、主搬送ロボット4との間で基板の受け渡しを行うインデクサロボット7とを備えている。
【0027】
主搬送ロボット4は、基板Wを保持することができる一対のハンド40と、これらの一対のハンド40を保持した回転台41と、回転台41内に収容されたハンド進退機構42と、回転台41を上下動させる昇降機構43とを含む。この構成により、主搬送ロボット4は、回転台41を鉛直軸線回りに回転させて、ハンド40をいずれかの処理ユニット3または基板受け渡し位置Pに対向させる。そして、ハンド進退機構42の働きによって、ハンド40をそれらの搬送先に対して進退させる。また、昇降機構43の働きによって、ハンド40を上下動させ、それによって、それらの搬送先との間で基板Wの受け渡しを実行する。
【0028】
インデクサロボット7は、基台部11と、基台部11に保持された多関節アーム20と、多関節アーム20に結合された一対のハンド23(23A,23B)図1では上下に重なり合っていて、上方側の一つのハンドのみが示されている。)とを含む。多関節アーム20は、第1アーム部21と、第2アーム部22とを含む。第1アーム部21は、その基端部が基台部11に鉛直軸線まわりの回動が可能であるように結合されている。第2アーム部22は、その基端部が第1アーム部21の先端部に対して鉛直軸線回りの回動が可能であるように結合されている。第2アーム部22の先端部は、各1枚の基板Wを保持する一対ハンド23が、それぞれ鉛直軸線まわりの回動が可能であるように結合されている。
【0029】
インデクサロボット7は、カセット載置台6に置かれたいずれかのカセット5から未処理の1枚の基板Wを搬出する。インデクサロボット7は、カセット5から取り出した未処理の基板Wを受け渡し位置Pにおいて主搬送ロボット4に渡す。主搬送ロボット4は、インデクサロボット7から受け取った未処理の基板Wを、複数の処理ユニット3のうちのいずれかに搬入する。一方、主搬送ロボット4は、処理済の基板Wを処理ユニット3から取り出して、この処理済の基板Wを受け渡し位置Pにおいてインデクサロボット7へと渡す。インデクサロボット7は、主搬送ロボット4から受け取った処理済の基板Wをいずれかのカセット5に収容する。
【0030】
なお、受け渡し位置Pにおける基板Wの受け渡しは、インデクサロボット7と主搬送ロボット4との間で直接受け渡す構成であってもよいし、受け渡し位置Pに基板を載置する基板載置台が設置され、インデクサロボット7および主搬送ロボット4が基板載置台に基板Wを載置し、基板載置台に載置された基板Wを受け取る構成であってもよい。
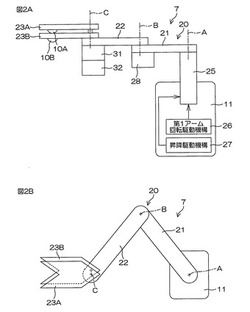
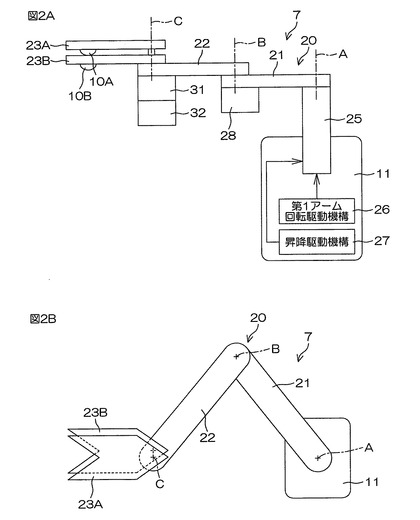
図2Aはインデクサロボット7の図解的な側面図であり、図2Bはインデクサロボット7の図解的な平面図である。多関節アーム20の第1アーム部21の基端部は、鉛直方向に延びた回転軸25に結合されている。回転軸25は、基台部11に対して、回転および上下動可能に結合されている。回転軸25は、第1アーム回転駆動機構26によって鉛直軸線Aまわりに回動され、昇降駆動機構27によって上下動されるように構成されている。第2アーム部22の基端部は、第1アーム部21の先端部に対して、当該第1アーム部21の先端部を通る鉛直軸線Bまわりに回動可能に結合されている。そして、第2アーム部22は、第2アーム回転駆動機構28によって、鉛直軸線Bまわりに回動されるように構成されている。一対のハンド23A,23Bは、異なる高さ位置に配置されており、それらの基端部は、第2アーム部22の先端部に対して、当該第2アーム部22の先端部を通る共通の鉛直軸線Cまわりに回動可能に結合されている(ただし、図2Bでは図示の都合上、ハンド23A,23Bおよび鉛直軸線Cをずらして描いてある)。そして、一対のハンド23A,23Bは、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32によって、鉛直軸線Cまわりに、互いに独立に回動されるように構成されている。
【0031】
第1アーム回転駆動機構26が回転軸25を鉛直軸線Aまわりに回動することにより、第1アーム部21は、その基端部を回動中心として、鉛直軸線Aまわりに水平方向へと揺動する。また、昇降駆動機構27が回転軸25を上下動させることにより、第1アーム部21が上下動し、それによって、多関節アーム20およびそれに結合されたハンド23が一体的に上下動する。第2アーム回転駆動機構28が第2アーム部22を鉛直軸線Bまわりに回動すると、第2アーム部22は、鉛直軸線Bまわりに水平方向へと揺動する。さらに、第1および第2ハンド回転駆動機構31,32が、ハンド23A,23Bを鉛直軸線Cまわりにそれぞれ回動すると、ハンド23A,23Bは、鉛直軸線Cまわりに水平方向へとそれぞれ揺動する。これらの第1および第2アーム部21,22およびハンド23A,23Bの動作の組み合わせによって、ハンド23A,23Bを任意のカセット5および基板受け渡し位置Pに対してアクセスさせることができる。
【0032】
ハンド23A,23Bとカセット5との間の基板Wの受け渡しは、ハンド23A,23Bがカセット5内に進入した状態で、昇降駆動機構27が多関節アーム20を微小距離だけ上下動させることによって達成される。すなわち、ハンド23A,23Bは、カセット5内の基板保持棚から基板Wをすくい取ったり、カセット5内の基板保持棚に基板Wを置いたりすることができる。基板受け渡し位置Pにおける主搬送ロボット4との基板受け渡しも同様にして行うことができる。むろん、多関節アーム20を上下動する代わりに、またその上下動と並行して、主搬送ロボット4のハンド40を上下動させることによっても、基板Wの受け渡しを行える。
【0033】
ハンド23A,23B(以下、総称するときには「ハンド23」という。)には、それぞれ動作補助ユニット10A,10B(以下、総称するときには「動作補助ユニット10」という。)が取り付けられている。動作補助ユニット10は、ハンド23の動作を補助するように構成されている。動作補助ユニット10は、たとえば、ハンド23の下面に固定されている。
【0034】
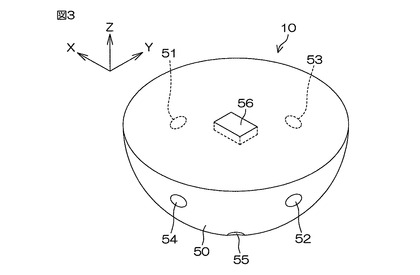
図3は、動作補助ユニット10の構成を図解した拡大図である。動作補助ユニット10は、ユニット本体50と、気体ノズル51〜55と、加速度センサ56(加速度検出手段)とを含む。気体ノズル51〜55は、X軸気体ノズル51,52と、Y軸気体ノズル53,54と、Z軸気体ノズル55とを含み、これらは、ユニット本体50に固定されている。X軸気体ノズル51,52は、ハンド23によって保持される基板Wの主面に平行な平面(理想的には水平面)に沿う一方向であるX軸方向に平行な方向に沿って気体(たとえば空気)を噴射する水平方向ノズルである。さらに具体的には、一つのX軸気体ノズル51は、X軸方向に気体を噴射し、もう一つのX軸気体ノズル52は、X軸方向とは正反対の反X軸方向に気体を噴射するように構成されている。Y軸気体ノズル53,54は、ハンド23によって保持される基板Wの主面に平行な平面(理想的には水平面)に沿う他の方向であり、X軸と直交するY軸方向に平行な方向に沿って気体(たとえば空気)を噴射する水平方向ノズルである。さらに具体的には、一つのY軸気体ノズル53は、Y軸方向に気体を噴射し、もう一つのY軸気体ノズル54は、Y軸方向とは正反対の反Y軸方向に気体を噴射するように構成されている。Z軸気体ノズル55は、ハンド23によって保持される基板Wの主面に垂直な方向(理想的には鉛直方向)であるZ軸方向と平行に気体を噴射するように構成されている。より具体的には、Z軸気体ノズル55は、上向き方向であるZ軸方向とは正反対の下向き方向である反Z軸方向に向けて気体を噴射する抗重力ノズルである。
【0035】
ユニット本体50は、ハンド23に固定されているので、ハンド23の姿勢に応じて、X軸、Y軸、およびZ軸の各方向が変化する。具体的には、X軸およびY軸は、ハンド23の向きに応じて鉛直軸線まわりに回動し得る軸である。また、ハンド23の水平姿勢が変化すれば、Z軸は、鉛直方向からずれるように回動し得る。
加速度センサ56は、ハンド23に作用する加速度(慣性力と言い換えることもできる。)を検出するように構成されている。加速度センサ56は、この実施形態では、X軸方向の加速度、Y軸方向の加速度、およびZ軸方向の加速度を検出する。
【0036】
ハンド23がX軸方向への動作を開始または加速するとき、加速度センサ56は、X軸方向の加速度(反X軸方向への慣性力)を検出する。ハンド23がX軸方向への動作を減速または停止するとき、加速度センサ56は、反X軸方向の加速度(X軸方向への慣性力)を検出する。ハンド23が反X軸方向への動作を開始または加速するとき、加速度センサ56は、反X軸方向の加速度(X軸方向への慣性力)を検出する。ハンド23が反X軸方向への動作を減速または停止するとき、加速度センサ56は、X軸方向の加速度(反X軸方向への慣性力)を検出する。
【0037】
同様に、ハンド23がY軸方向への動作を開始または加速するとき、加速度センサ56は、Y軸方向の加速度(反Y軸方向への慣性力)を検出する。ハンド23がY軸方向への動作を減速または停止するとき、加速度センサ56は、反Y軸方向の加速度(Y軸方向への慣性力)を検出する。ハンド23が反Y軸方向への動作を開始または加速するとき、加速度センサ56は、反Y軸方向の加速度(Y軸方向への慣性力)を検出する。ハンド23が反Y軸方向への動作を減速または停止するとき、加速度センサ56は、Y軸方向の加速度(反Y軸方向への慣性力)を検出する。
【0038】
また、加速度センサ56は、重力加速度をZ軸方向に正射影した加速度成分を検出する。さらに、ハンド23がZ軸方向への動作(上昇)を開始または加速するとき、加速度センサ56は、重力加速度に加えてZ軸方向の加速度(反Z軸方向への慣性力)を検出する。ハンド23がZ軸方向への動作を減速または停止するとき、加速度センサ56は、重力加速度に加えて反Z軸方向の加速度(Z軸方向への慣性力)を検出する。ハンド23が反Z軸方向への動作(下降)を開始または加速するとき、加速度センサ56は、重力加速度に加えて反Z軸方向の加速度(Z軸方向への慣性力)を検出する。ハンド23が反Z軸方向への動作を減速または停止するとき、加速度センサ56は、重力加速度に加えて、Z軸方向の加速度(反Z軸方向への慣性力)を検出する。
【0039】
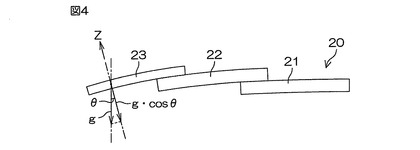
たとえば、図4に誇張して示すように、第1および第2アーム部21,22を展開して多関節アーム20を伸張させたときに多関節アーム20が重力によって下方に撓むと、ハンド23は、先端側の垂れ下がった傾斜姿勢となる。このとき、Z軸方向は、重力加速度gが作用する鉛直方向に対して傾斜角θをなす。よって、加速度センサ56は、Z軸方向の加速度として、g・cosθを検出する。したがって、Z軸方向加速度の検出値g・cosθを重力加速度gと比較することによって、ハンド23の姿勢(傾斜角θ)を検出できる。
【0040】
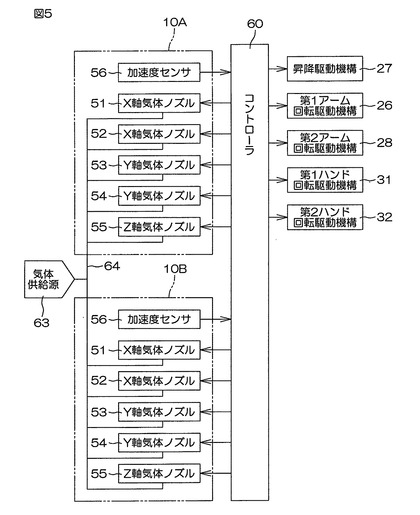
図5は、インデクサロボット7の動作制御に関連する構成を示すブロック図である。昇降駆動機構27、第1アーム回転駆動機構26、第2アーム回転駆動機構28、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32は、コントローラ60によって制御される。さらに、コントローラ60は、動作補助ユニット10(10A,10B)の動作を制御するように構成(プログラム)されている。より具体的には、加速度センサ56の出力信号がコントローラ60に入力されている。また、コントローラ60は、気体ノズル51〜55による気体の噴射を制御する噴射制御手段としての機能を有している。気体ノズル51〜55には、気体供給源63から加圧された気体(たとえば空気、窒素その他の不活性ガス)が、気体供給路64を介して供給されている。コントローラ60は、気体ノズル51〜55から噴射される気体の噴射量、噴射時間、噴射流量および噴射圧力から選択した一つまたは二つ以上の噴射制御量を制御するように構成(プログラム)されていてもよい。
【0041】
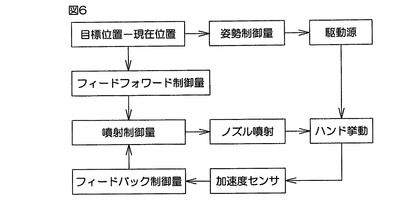
図6は、インデクサロボット7の制御に関するコントローラ60の制御ブロック図である。コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて駆動機構26〜28,31,32の各駆動源(たとえばサーボモータ)の制御量(姿勢制御量)を求めて、その制御量に応じて当該駆動源を制御する。これにより駆動源が駆動されると、インデクサロボット7の挙動に変化が生じる。一方、コントローラ60は、ハンド23の目標位置と現在位置との偏差に応じて、フィードフォワード制御量を求める。さらに、インデクサロボット7の挙動(加速度)が加速度センサ56によって検出され、その検出値に基づいて、コントローラ60は、フィードバック制御量を求める。さらに、コントローラ60は、フィードフォワード制御量およびフィードバック制御量に基づいて、各気体ノズル51〜55の噴射制御量(たとえば噴射量)を求める。この求められた噴射制御量に基づいて各気体ノズル51〜55が制御されて、気体が噴射される。気体の噴射によって生じた反力がハンド23に作用すると、これにより、インデクサロボット7の挙動に変化がもたらされる。この変化が、さらに、加速度センサ56によって検出される。
【0042】
フィードフォワード制御量は、ハンド23が現在位置から目標位置まで移動される過程でハンド23に働くと予測される慣性力を打ち消すための噴射制御量である。フィードフォワード制御を行うことで、フィードバック制御における応答遅れを補償して、制御の応答性を高めることができる。
フィードバック制御量は、加速度センサ56によって実際に検出されている慣性力を打ち消すための噴射制御量である。フィードバック制御を行うことで、ハンド23の実際の挙動に対応した噴射制御量を設定できる。
【0043】
ハンドの現在位置および目標位置は、回転軸25の上下位置、第1アーム部21の回転位置、第2アーム部22の回転位置、およびハンド23の回転位置によって表されてもよい。それぞれの位置は、昇降駆動機構27、第1アーム回転駆動機構26、第2アーム回転駆動機構28、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32の駆動源としての電動モータの制御位置(たとえば制御ステップ数)によって表されてもよい。
【0044】
具体的な制御内容について説明すると、ハンド23が動作開始または加速するときには、その動作方向への加速度が発生し、それに応じて、その動作方向と正反対の方向への慣性力が生じる。そこで、気体ノズル51〜55は、その動作方向への反力が生じるように、気体を噴射する。すなわち、気体ノズル51〜55は、ハンド23の動作を加速するように気体を噴射する加速ノズルとして機能する。また、ハンド23が減速または動作停止するときには、その動作方向とは反対方向への加速度が発生し、それに応じて、その動作方向への慣性力が生じる。そこで、気体ノズル51〜55は、その動作方向とは反対方向への反力が生じるように、気体を噴射する。すなわち、気体ノズル51〜55は、ハンド23の動作を制動するように気体を噴射する制動ノズルとして機能する。
【0045】
たとえば、X軸方向にハンド23が動作開始または加速するときは、X軸気体ノズル52から、反X軸方向に気体が噴射される。これにより、その気体の噴射による反力がX軸方向に作用するから、X軸方向へのハンド23の動作が補助される。反X軸方向にハンド23が動作開始または加速するときは、X軸気体ノズル51から、X軸方向に気体が噴射される。これにより、その気体の噴射による反力が反X軸方向に作用するから、反X軸方向へのハンド23の動作が補助される。一方、X軸方向へのハンド23の動作を減速または停止するときは、X軸気体ノズル51から、X軸方向に気体が噴射される。これにより、その気体の噴射による反力が反X軸方向に作用するから、X軸方向へのハンド23の動作が制動される。同様に、反X軸方向へのハンド23の動作を減速または停止するときは、X軸気体ノズル52から、反X軸方向に気体が噴射される。これにより、その気体の噴射による反力がX軸方向に作用するから、反X軸方向へのハンド23の動作が制動される。
【0046】
Y軸に関しても同様であり、Y軸方向にハンド23が動作開始または加速するときは、Y軸気体ノズル54から、反Y軸方向に気体が噴射される。これにより、その気体の噴射による反力がY軸方向に作用するから、Y軸方向へのハンド23の動作が補助される。反Y軸方向にハンド23が動作開始または加速するときは、Y軸気体ノズル53から、Y軸方向に気体が噴射される。これにより、その気体の噴射による反力が反Y軸方向に作用するから、反Y軸方向へのハンド23の動作が補助される。一方、Y軸方向へのハンド23の動作を減速または停止するときは、Y軸気体ノズル53から、Y軸方向に気体が噴射される。これにより、その気体の噴射による反力が反Y軸方向に作用するから、Y軸方向へのハンド23の動作が制動される。同様に、反Y軸方向へのハンド23の動作を減速または停止するときは、Y軸気体ノズル54から、反Y軸方向に気体が噴射される。これにより、その気体の噴射による反力がY軸方向に作用するから、反Y軸方向へのハンド23の動作が制動される。
【0047】
X軸またはY軸のいずれとも平行でない方向にハンド23が動作開始もしくは加速するとき、または減速もしくは動作停止するときは、その方向に応じた比で、X軸気体ノズル51,52とY軸気体ノズル53,54との噴射制御量をそれぞれ設定すればよい。これにより、ハンド23の動作方向への加速を補助したり、その動作方向への動作を制動したりすることができる。
【0048】
Z軸気体ノズル55は、多関節アーム20を上昇させるときに気体を噴射して、多関節アーム20およびハンド23の上移動を補助するように制御されてもよい(加速ノズルとしての働き)。また、Z軸気体ノズル55は、多関節アーム20を下降して停止させるときに気体を噴射して、多関節アーム20およびハンド23の下移動を制動するように制御されてもよい(制動ノズルとしての働き)。さらに、Z軸気体ノズル55は、多関節アーム20を伸展させるときに、多関節アーム20の撓みに起因するハンド23の姿勢変化を抑制するように、気体を噴射するように制御されてもよい。
【0049】
以上のように、この実施形態によれば、ハンド23に備えられた気体ノズル51〜55から気体を噴射することによって、その噴射による反力がハンド23に加わり、それによって、ハンド23の動作が補助される。すなわち、ハンド23に加わる反力により、ハンド23の動きを加速したり、ハンド23の動きを減速したり、ハンド23の姿勢を変化させたりすることができる。したがって、ハンド23に働く慣性力等を気体ノズル51〜55からの気体噴射により生じる反力によって打ち消すことができるので、多関節アーム20の構成部品等の剛性を高めなくても、ハンド23を高速移動させるときの加速および減速を、遅れや振動を抑制して円滑に行える。
【0050】
また、気体の噴射によってハンド23を加速できるので、ハンド23を速やかに加速することができ、ハンド23の動作速度が速やかに最高速に達する。これにより、基板Wを高速搬送できる。また、気体の噴射によってハンド23を速やかに減速することができるので、速やかにハンド23を停止させることができ、かつ、停止時のハンド23の振動を抑制できる。これにより、基板の高速搬送に寄与できる。
【0051】
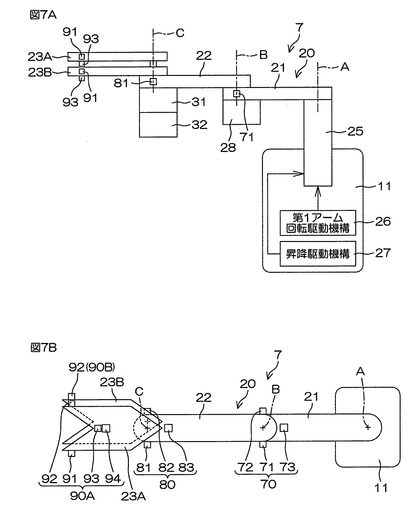
図7Aは、この発明の第2の実施形態に係るインデクサロボットを説明するための図解的な側面図であり、図7Bは、その図解的な平面図である。これらの図7Aおよび7Bにおいて、前述の図2Aおよび2Bに示された各部に対応する部分には、同一の参照符号を付して示す。
このインデクサロボットは、図1に示した基板処理装置において、図2Aおよび図2Bに示した基板処理装置におけるインデクサロボット7として用いることができるものである。この実施形態のインデクサロボット7は、第1の実施形態の場合と同様に、ハンド23A,23B、多関節アーム20、第1アーム回転駆動機構26、昇降駆動機構27、第2アーム回転駆動機構28、第1ハンド回転駆動機構31、および第2ハンド回転駆動機構32を含む。この実施形態のインデクサロボット7では、第1アーム部21の先端部に、気体ノズル71,72(アーム動作補助ノズル)と、加速度センサ73とが配置されている。また、第2アーム部22の先端部に、気体ノズル81,82(アーム動作補助ノズル)と、加速度センサ83とが配置されている。さらに、ハンド23A,23Bのそれぞれの先端部に、気体ノズル91,92,93と、加速度センサ94とが配置されている。
【0052】
気体ノズル71,72は、平面視において、第1アーム部21の先端部が鉛直軸線Aを中心に回動するときの経路(円弧状経路)の接線方向(第1アーム部21の先端部の位置における接線方向)に沿ってほぼ水平方向に気体を噴射するように、第1アーム部21の先端部に固定されている。気体ノズル71,72は、互いに正反対方向に気体を噴射するように構成されている。より具体的には、気体ノズル71は、平面視において反時計回り方向に気体を噴射する。したがって、気体ノズル71が気体を噴射したときの反力は、第1アーム部21に対して時計回り方向に作用する。これにより、第1アーム部21の時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第1アーム部21の反時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。一方、気体ノズル72は、平面視において時計回り方向に気体を噴射する。したがって、気体ノズル72が気体を噴射したときの反力は、第1アーム部21に対して反時計回り方向に作用する。これにより、第1アーム部21の反時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第1アーム部21の時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。
【0053】
加速度センサ73は、平面視において、第1アーム部21の先端部が鉛直軸線Aを中心に回動するときの経路(円弧状経路)の接線方向(第1アーム部21の先端部の位置における接線方向)に沿って設定されたほぼ水平な検出方向に沿う加速度(慣性力)を検出するように、第1アーム部21の先端部に固定されている。これにより、加速度センサ73は、平面視において時計回り方向および反時計回り方向の加速度を検出するように構成されている。
【0054】
気体ノズル81,82は、平面視において、第2アーム部22の先端部が鉛直軸線Bを中心に回動するときの経路(円弧状経路)の接線方向(第2アーム部22の先端部の位置における接線方向)に沿ってほぼ水平方向に気体を噴射するように、第2アーム部22の先端部に固定されている。気体ノズル81,82は、互いに正反対方向に気体を噴射するように構成されている。より具体的には、気体ノズル81は、平面視において反時計回り方向に気体を噴射する。したがって、気体ノズル81が気体を噴射したときの反力は、第2アーム部22に対して時計回り方向に作用する。これにより、第2アーム部22の時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第2アーム部22の反時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。一方、気体ノズル82は、平面視において時計回り方向に気体を噴射する。したがって、気体ノズル82が気体を噴射したときの反力は、第2アーム部22に対して反時計回り方向に作用する。これにより、第2アーム部22の反時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第2アーム部22の時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。
【0055】
加速度センサ83は、平面視において、第2アーム部22の先端部が鉛直軸線Bを中心に回動するときの経路(円弧状経路)の接線方向(第2アーム部22の先端部の位置における接線方向)に沿って設定されたほぼ水平な検出方向に沿う加速度(慣性力)を検出するように、第2アーム部22の先端部に固定されている。これにより、加速度センサ83は、平面視において時計回り方向および反時計回り方向の加速度を検出するように構成されている。
【0056】
気体ノズル91,92は、水平方向ノズルであり、平面視において、ハンド23(23A,23B)の先端部が鉛直軸線Cを中心に回動するときの経路(円弧状経路)の接線方向(ハンド23の先端部の位置における接線方向)に沿ってほぼ水平方向に気体を噴射するように、ハンド23の先端部に固定されている。気体ノズル91,92は、互いに正反対方向に気体を噴射するように構成されている。より具体的には、気体ノズル91は、平面視において反時計回り方向に気体を噴射する。したがって、気体ノズル91が気体を噴射したときの反力は、ハンド23に対して時計回り方向に作用する。これにより、ハンド23の時計回り方向の動作を加速したり(加速ノズルとしての働き)、ハンド23の反時計回り方向の動作を制動したりすることができる(制動ノズルとしての働き)。一方、気体ノズル92は、平面視において時計回り方向に気体を噴射する。したがって、気体ノズル92が気体を噴射したときの反力は、ハンド23に対して反時計回り方向に作用する。これにより、ハンド23の反時計回り方向の動作を加速したり(加速ノズルとしての働き)、ハンド23の時計回り方向の動作を制動したりすることができる(制動ノズルとしての働き)。
【0057】
気体ノズル93は、ハンド23が保持する基板Wの主面に垂直なZ軸に沿って気体を噴射するようにハンド23の先端部に固定された抗重力ノズルである。この気体ノズル93は、第1の実施形態におけるZ軸気体ノズル55と同様な働きを有している。すなわち、気体ノズル93から気体が噴射されると、それによって生じる反力は、ハンド23の先端部を重力に抗して持ち上げる。これにより、多関節アーム20を伸展させたときに、ハンド23が垂れ下がっても、ハンド23の姿勢を保持して、基板Wを水平姿勢に保持できる。また、多関節アーム20が上昇するときに気体ノズル93から気体を噴射すれば、ハンド23に働く下方向の慣性力を緩和または打ち消すことができるので、ハンド23を速やかに動作開始させたり、加速したりすることができる(加速ノズルとしての働き)。さらに、多関節アーム20が下降して停止するときに気体ノズル93から気体を噴射すれば、ハンド23に働く下方向の慣性力を緩和または打ち消すことができるので、ハンド23を速やかに、かつ振動を抑制しながら動作停止させることができる(制動ノズルとしての働き)。
【0058】
加速度センサ94は、平面視において、ハンド23の先端部が鉛直軸線Cを中心に回動するときの経路(円弧状経路)の接線方向(ハンド23の先端部の位置における接線方向)に沿って設定されたほぼ水平な検出方向に沿う加速度(慣性力)を検出するように、ハンド23の先端部に固定されている。これにより、加速度センサ94は、平面視において時計回り方向および反時計回り方向の加速度を検出するように構成されている。加速度センサ94は、さらに、前記Z軸に平行に作用する加速度を検出するように構成されている。加速度センサ94は、ハンド23の静止状態においては、重力加速度gのZ軸成分(Z軸への正射影)を検出する。また、ハンド23が上下動するときは、重力加速度gと慣性力に対応する加速度との合成加速度を検出する。したがって、加速度センサ94は、第1の実施形態における加速度センサ56と同様の働きを有している。
【0059】
第1の実施形態の動作補助ユニット10と同様に、気体ノズル71,72および加速度センサ73が第1のユニット本体に一体的に保持されて第1アーム動作補助ユニット70を構成していてもよい。同様に、気体ノズル91,92および加速度センサ83が第2のユニット本体に一体的に保持されて第2アーム動作補助ユニット80を構成していてもよい。さらに、気体ノズル91,92,93および加速度センサ94が第3のユニット本体に一体的に保持されてハンド動作補助ユニット90(ハンド23A,23Bにそれぞれ対応したユニット90A,90B)を構成していてもよい。むろん、このようなユニット化がされていなくてもよい。また、たとえば、複数のノズルをユニット化する一方で、加速度センサを別ユニットとしてもよい。
【0060】
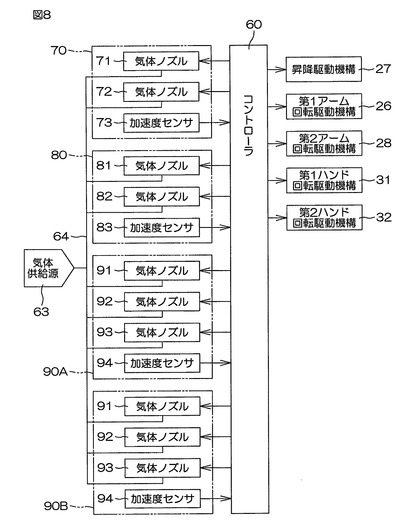
図8は、前記第2の実施形態に係るインデクサロボット7の動作制御に関連する構成を示すブロック図である。図8において、前述の図5に示された各部に対応する部分には、図5と同一参照符号を付して示す。昇降駆動機構27、第1アーム回転駆動機構26、第2アーム回転駆動機構28、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32は、コントローラ60によって制御される。さらに、コントローラ60は、第1アーム動作補助ユニット70、第2アーム動作補助ユニット80、およびハンド動作補助ユニット90(90A,90B)の動作を制御するように構成(プログラム)されている。より具体的には、加速度センサ73,83,94の出力信号がコントローラ60に入力されている。また、コントローラ60は、気体ノズル71,72,81,82,91〜93による気体の噴射を制御する。気体ノズル71,72,81,82,91〜93には、気体供給源63から加圧された気体(たとえば空気、窒素その他の不活性ガス)が、気体供給路64を介して供給されている。コントローラ60は、気体ノズル71,72,81,82,91〜93から噴射される気体の噴射量、噴射時間、噴射流量および噴射圧力から選択した一つまたは二つ以上の噴射制御量を制御するように構成(プログラム)されていてもよい。
【0061】
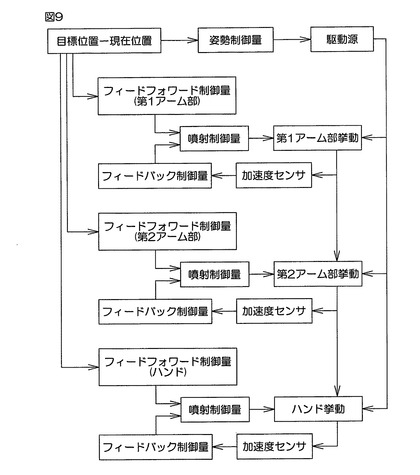
図9は、インデクサロボット7の制御に関するコントローラ60の制御ブロック図である。コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて駆動機構26〜28,31,32の各駆動源(たとえばサーボモータ)の制御量(姿勢制御量)を求めて、その制御量に応じて当該駆動源を制御する。そして、駆動源の駆動結果が、インデクサロボット7(第1アーム部21,第2アーム部22およびハンド23)の挙動に反映される。一方、コントローラ60は、ハンド23の目標位置と現在位置との偏差に応じて、第1アーム部21、第2アーム部22およびハンド23にそれぞれ対応したフィードフォワード制御量を求める。さらに、インデクサロボット7の挙動(加速度)が加速度センサ73,83,94によって検出され、その検出値に基づいて、コントローラ60は、第1アーム部21、第2アーム部22およびハンド23にそれぞれ対応したフィードバック制御量を求める。さらに、コントローラ60は、フィードフォワード制御量およびフィードバック制御量に基づいて、各気体ノズル71,72,81,82,91〜93の噴射制御量(たとえば噴射量)を求める。この求められた噴射量に基づいて、各気体ノズル71,72,81,82,91〜93が制御されて、気体が噴射される。気体の噴射によって生じた反力が第1アーム部21、第2アーム部22およびハンド23のいずれかに作用すると、これにより、インデクサロボット7(第1アーム部21、第2アーム部22およびハンド23)の挙動に変化がもたらされる。この変化が、さらに、加速度センサ73,83,94によって検出される。第1アーム部21の挙動は、第2アーム部22の挙動に影響し、さらに第2アーム部22の挙動はハンド23の挙動に影響する。
【0062】
フィードフォワード制御量は、ハンド23が現在位置から目標位置まで移動される過程で第1および第2アーム部21,22ならびにハンド23にそれぞれ働くと予測される慣性力を打ち消すための噴射制御量である。フィードフォワード制御を行うことで、フィードバック制御における応答遅れを補償して、制御の応答性を高めることができる。
フィードバック制御量は、加速度センサ73,83,94によって実際に検出されている慣性力を打ち消すための噴射制御量である。フィードバック制御を行うことで、第1および第2アーム部21,22ならびにハンド23の実際の挙動に対応した噴射制御量を設定できる。
【0063】
具体的な制御について説明すると、第1アーム部21が動作開始または加速するときには、その動作方向への加速度が発生し、それに応じて、その動作方向と正反対の方向への慣性力が生じる。第2アーム部22およびハンド23についても同様である。そこで、気体ノズル71,72,81,82,91〜93は、その動作方向への反力が生じるように、気体を噴射する。この場合、気体ノズル71,72,81,82,91〜93は、アーム部21,22またはハンド23の動作を加速するように気体を噴射する加速ノズルとして機能する。また、第1アーム部21が減速または動作停止するときには、その動作方向とは反対方向への加速度が発生し、それに応じて、その動作方向への慣性力が生じる。第2アーム部22およびハンド23についても同様である。そこで、気体ノズル71,72,81,82,91〜93は、その動作方向とは反対方向への反力が生じるように、気体を噴射する。すなわち、気体ノズル71,72,81,82,91〜93は、ハンド23の動作を制動するように気体を噴射する制動ノズルとして機能する。
【0064】
たとえば、第1アーム部21が平面視において時計回り方向に回動開始または加速するときは、気体ノズル71から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、時計回り方向への第1アーム部21の回動が補助(加速)される。反時計回り方向に第1アーム部21が回動開始または加速するときは、気体ノズル72から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、反時計回り方向への第1アーム部21の回動が補助(加速)される。一方、反時計回り方向への第1アーム部21の回動を減速または停止するときは、気体ノズル71から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、反時計回り方向への第1アーム部21の回動が制動される。同様に、時計回り方向への第1アーム部21の回動を減速または停止するときは、気体ノズル72から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、時計回り方向への第1アーム部21の回動が制動される。
【0065】
第2アーム部22に関しても同様である。すなわち、第2アーム部22が平面視において時計回り方向に回動開始または加速するときは、気体ノズル81から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、時計回り方向への第2アーム部22の回動が補助(加速)される。反時計回り方向に第2アーム部22が回動開始または加速するときは、気体ノズル82から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、反時計回り方向への第2アーム部22の回動が補助(加速)される。一方、反時計回り方向への第2アーム部22の回動を減速または停止するときは、気体ノズル81から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、反時計回り方向への第2アーム部22の回動が制動される。同様に、時計回り方向への第2アーム部22の回動を減速または停止するときは、気体ノズル82から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、時計回り方向への第2アーム部22の回動が制動される。
【0066】
ハンド23の回動に関しても同様である。すなわち、ハンド23が平面視において時計回り方向に回動開始または加速するときは、気体ノズル91から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、時計回り方向へのハンド23の回動が補助(加速)される。反時計回り方向にハンド23が回動開始または加速するときは、気体ノズル92から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、反時計回り方向へのハンド23の回動が補助(加速)される。一方、反時計回り方向へのハンド23の回動を減速または停止するときは、気体ノズル91から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、反時計回り方向へのハンド23の回動が制動される。同様に、時計回り方向へのハンド23の回動を減速または停止するときは、気体ノズル92から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、時計回り方向へのハンド23の回動が制動される。
【0067】
ハンド23に固定されたもう一つの気体ノズル93は、多関節アーム20を上昇させるときに気体を噴射して、多関節アーム20およびハンド23の上移動を補助(加速)するように制御されてもよい。また、気体ノズル93は、多関節アーム20を下降して停止させるときに気体を噴射して、多関節アーム20およびハンド23の下移動を制動するように制御されてもよい。さらに、気体ノズル93は、多関節アーム20を伸展させるときに、多関節アーム20の撓みに起因するハンド23の姿勢変化を抑制するように、気体を噴射するように制御されてもよい。
【0068】
以上のように、この実施形態によれば、多関節アーム20を構成するアーム部21,22の動作が、気体ノズル71,72,81,82からの気体噴射によって得られる反力によって補助される。したがって、ハンド23だけでなくアーム部21,22の動作も補助されるので、より高速な基板搬送が可能になり、かつ停止時等の振動も一層抑制される。また、多関節アーム20の剛性を高めることなく高速搬送が可能なので、コストの大幅な増加を伴うこともなく、かつ、重量が大幅に増加することもない。その他、第1の実施形態と同様の効果が得られる。
【0069】
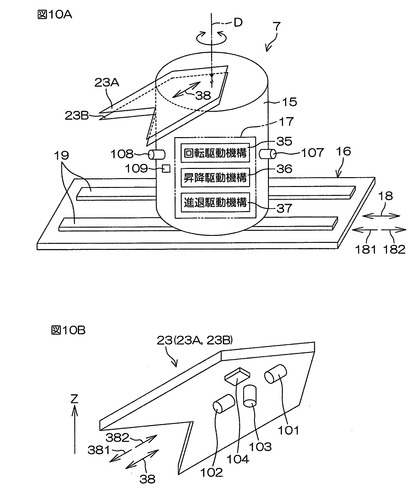
図10Aは、この発明の第3の実施形態に係るインデクサロボット7の構成を説明するための図解的な斜視図であり、図10Bは、ハンド23の下方から見た斜視図である。このインデクサロボット7は、基台部15と、横移動機構16と、ハンド駆動機構17と、一対のハンド23A,23Bとを含む。
基台部15は、横移動方向18に沿って敷設されたレール19上を、当該横移動方向18に平行な搬送経路に沿って走行可能に構成されている。横移動方向18は、図1に示す基板処理装置において、カセット載置台6の配列方向(カセット配列方向)に平行に設定される。横移動機構16は、ボールねじ機構等を含み、基台部15を横移動方向18に沿ってレール19上で往復走行(横移動)させる。ハンド駆動機構17は、一対のハンド23A,23Bを基台部15に対して鉛直軸線Dまわりに回転させる回転駆動機構35と、ハンド23A,23Bを基台部15に対して上下動させる昇降駆動機構36と、ハンド23A,23Bを独立して水平方向に進退させる進退駆動機構37とを含む。ハンド23A,23Bの進退方向38は、平面視において基台部15に対して接近/離反する水平方向であり、各ハンド23A,23Bの前後方向である。進退方向38は、ハンド23A,23Bの向きに従う方向なので、ハンド23A,23Bとともに鉛直軸線Dまわりに回転し得る方向である。
【0070】
横移動機構16によって基台部15をレール19上で走行させることによって、ハンド23をいずれかのカセット5または基板受け渡し位置P(図1参照)に正対(すなわち、平面視においてレール19に直交する方向に沿って対向)する位置まで移動することができる。また、回転駆動機構35によりハンド23を鉛直軸線Dまわりに回転させることにより、ハンド23の進退方向38を、正対したカセット5または基板受け渡し位置Pに向けることができる。さらに、昇降駆動機構36によってハンド23を上下動させることによって、カセット5または主搬送ロボット4との基板受け渡し高さにハンド23を配置でき、かつ、それらとの間で基板Wを受け渡しできる。
【0071】
ハンド23には、ハンド気体ノズル101,102,103が設けられている。それらのうちの2つのハンド気体ノズル101,102は、ハンド23の進退方向38に平行な水平方向に向けて気体を噴射するようにハンド23に固定された水平ノズルである。これらのハンド気体ノズル101,102は、進退方向38に沿って、互いに反対方向に気体を噴射するように構成されている。すなわち、一つのハンド気体ノズル101は、ハンド23の後方に向かって気体を噴射し、もう一つのハンド気体ノズル102は、ハンド23の前方に向かって気体を噴射する。さらにもう一つのハンド気体ノズル103は、下方に向けて気体を噴射するようにハンド23に固定された抗重力ノズルである。より詳細には、ハンド気体ノズル103は、ハンド23によって保持される基板Wの主面に直交するZ軸方向に沿って、下向きに気体を噴射する。
【0072】
ハンド23には、さらに、加速度センサ104が取り付けられている。加速度センサ104は、ハンド23の進退方向38に沿う方向の加速度と、Z軸方向に沿う加速度とを検出するように構成されている。
一方、基台部15には、横移動方向18に平行な方向に気体を噴射する2つの基台部気体ノズル107,108(基台部動作補助ノズル)が備えられている。さらに、基台部15には、横移動方向18に平行な水平方向に沿う加速度を検出する加速度センサ109が備えられている。
【0073】
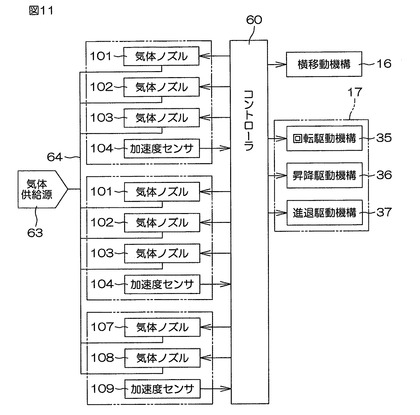
図11は、前記第3の実施形態に係るインデクサロボット7の動作制御に関連する構成を示すブロック図である。図11において、前述の図5に示された各部に対応する部分には、図5と同一参照符号を付して示す。横移動機構16およびハンド駆動機構17(回転駆動機構35、昇降駆動機構36、進退駆動機構37)は、コントローラ60によって制御される。さらに、加速度センサ104,109の出力信号がコントローラ60に入力されている。また、コントローラ60は、気体ノズル101〜103,107,108による気体の噴射を制御する。気体ノズル101〜103,107,108には、気体供給源63から加圧された気体(たとえば空気、窒素その他の不活性ガス)が、気体供給路64を介して供給されている。コントローラ60は、気体ノズル101〜103,107,108から噴射される気体の噴射量、噴射時間、噴射流量および噴射圧力から選択した一つまたは二つ以上の噴射制御量を制御するように構成(プログラム)されていてもよい。
【0074】
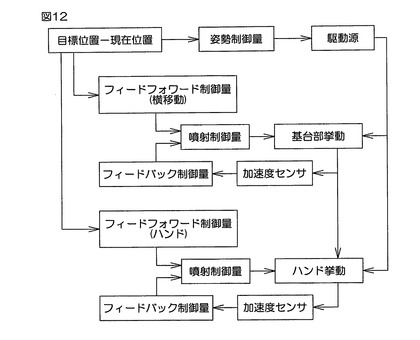
図12は、インデクサロボット7の制御に関するコントローラ60の制御ブロック図である。コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて駆動機構16,17の各駆動源(たとえばサーボモータ)の制御量(姿勢制御量)を求め、その制御量に応じて当該駆動源を制御する。この制御が、インデクサロボット7の挙動(基台部15およびハンド23)に反映される。一方、コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて、基台部15の横移動およびハンド23の進退のためのフィードフォワード制御量を求める。さらに、ハンド23および基台部15の挙動(加速度)が加速度センサ104,109によって検出され、それらの検出値に基づいて、コントローラ60は、ハンド23の進退および基台部15の横移動のためのフィードバック制御量を求める。さらに、コントローラ60は、ハンド23の進退および基台部15の横移動のためのフィードフォワード制御量およびフィードバック制御量に基づいて、各気体ノズル101〜103,107,108の噴射制御量(たとえば噴射量)を求める。この求められた噴射量に基づいて、各気体ノズル101〜103,107,108が制御されて、気体が噴射される。気体の噴射によって生じた反力が基台部15およびハンド23のいずれかに作用すると、これによりインデクサロボット7の挙動に変化がもたらされる。この変化が、さらに、加速度センサ104,109によって検出される。基台部15の挙動は、ハンド23の挙動に影響を及ぼす。
【0075】
フィードフォワード制御量は、ハンド23が現在位置から目標位置まで移動される過程で基台部15およびハンド23に働くと予測される慣性力を打ち消すための噴射制御量である。フィードフォワード制御を行うことで、フィードバック制御における応答遅れを補償して、制御の応答性を高めることができる。
フィードバック制御量は、加速度センサ104,109によって実際に検出されている慣性力を打ち消すための噴射制御量である。フィードバック制御を行うことで、基台部15およびハンド23の実際の挙動に対応した噴射制御量を設定できる。
【0076】
具体的な制御について説明すると、基台部15が動作開始または加速するときには、その動作方向への加速度が発生し、それに応じて、その動作方向と正反対の方向への慣性力が生じる。ハンド23についても同様である。そこで、101〜103,107,108は、その動作方向への反力が生じるように、気体を噴射する。
たとえば、基台部15が横移動方向18に平行な第1方向181に移動開始または加速するときは、基台部気体ノズル107から、横移動方向18に平行な第2方向182(第1方向181の正反対方向)に向けて気体が噴射される。これにより、その気体の噴射による反力が第1方向181に作用するから、第1方向181への基台部15の移動が補助(加速)される(基台部加速ノズルとしての働き)。基台部15が第2方向182に移動開始または加速するときは、基台部気体ノズル108から、第1方向181に向けて気体が噴射される。これにより、その気体の噴射による反力が第2方向182に作用するから、第2方向182への基台部15の移動が補助(加速)される(基台部加速ノズルとしての働き)。一方、第1方向181への基台部15の移動を減速または停止するときは、基台部気体ノズル108から、第1方向181に気体が噴射される。これにより、その気体の噴射による反力が第2方向182に作用するから、基台部15の第1方向181への移動が制動される(基台部制動ノズルとしての働き)。同様に、第2方向182への基台部15の移動を減速または停止するときは、基台部気体ノズル107から、第2方向182に気体が噴射される。これにより、その気体の噴射による反力が第1方向181に作用するから、第2方向182への基台部15の移動が制動される(基台部制動ノズルとしての働き)。
【0077】
また、前進方向381にハンド23が動作開始または加速するときは、ハンド気体ノズル101から、後退方向382に向けて気体が噴射される。これにより、その気体の噴射による反力が前進方向381に作用するから、前進方向381へのハンド23の動作が補助(加速)される(加速ノズルとしての働き)。後退方向382にハンド23が動作開始または加速するときは、ハンド気体ノズル102から、前進方向381に気体が噴射される。これにより、その気体の噴射による反力が後退方向382に作用するから、後退方向382へのハンド23の動作が補助(加速)される(加速ノズルとしての働き)。一方、前進方向381へのハンド23の動作を減速または停止するときは、ハンド気体ノズル102から、前進方向381に気体が噴射される。これにより、その気体の噴射による反力が後退方向382に作用するから、前進方向381へのハンド23の動作が制動される(制動ノズルとしての働き)。同様に、後退方向382へのハンド23の動作を減速または停止するときは、ハンド気体ノズル101から、後退方向382に気体が噴射される。これにより、その気体の噴射による反力が前進方向381に作用するから、後退方向382へのハンド23の動作が制動される(制動ノズルとしての働き)。
【0078】
ハンド23に固定されたもう一つのハンド気体ノズル103は、ハンド23を上昇させるときに気体を噴射して、ハンド23の上移動を補助するように制御されてもよい。また、気体ノズル103は、ハンド23を下降して停止させるときに気体を噴射して、ハンド23の下移動を制動するように制御されてもよい。さらに、気体ノズル103は、ハンド23を前進させるときに、ハンド23および基板Wの自重に起因するハンド23の姿勢変化を抑制するように、気体を噴射するように制御されてもよい。
【0079】
以上のように、この実施形態によれば、基台部気体ノズル107,108からの気体の噴射により得られる反力によって、基台部15の動作を補助できる。したがって、基台部15の加速および/または減速を速やかに行うことができるから、基台部15の動作開始時に最高速に達するまでの時間を短縮でき、かつ基台部15を短時間で停止させることができる。これによって、基板Wの高速搬送に寄与できる。
【0080】
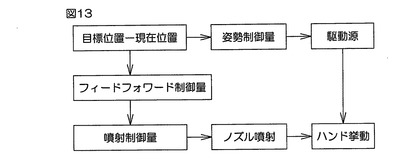
図13は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第4の実施形態)である。図6の制御構成では、フィードフォワード制御およびフィードバック制御が併用されているのに対して、図13の制御構成では、フィードバック制御が省かれている。この制御構成を採用する場合には、加速度センサを省くことができる。
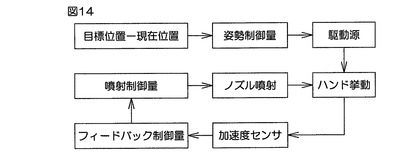
図14は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第5の実施形態)である。図6の制御構成では、フィードフォワード制御およびフィードバック制御が併用されているに対して、図14の制御構成では、フィードフォワード制御が省かれている。
【0081】
以上、この発明の5つの実施形態について説明してきたが、この発明は、さらに他の形態で実施することもできる。たとえば、前述の実施形態では、ハンド等の移動開始時および加速時の加速と、ハンド等の減速時および停止時の制動との両方を気体噴射によって補助しているが、加速のみまたは制動のみを気体噴射によって補助するようにしてもよい。また、前述の実施形態では、抗重力ノズルを備えた例を示したが、抗重力ノズルを省いてもよい。さらに、前述の第1および第2の実施形態では、第1アーム部21および第2アーム部22を有する多関節アーム20を例示したが、3つ以上のアーム部を連結した多関節アームを用いてもよい。その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0082】
1 基板処理モジュール
2 インデクサモジュール
3 処理ユニット
4 主搬送ロボット
5 カセット
6 カセット載置台
7 インデクサロボット
10A,10B 動作補助ユニット
11 基台部
15 基台部
16 横移動機構
17 ハンド駆動機構
18 横移動方向
181 第1方向
182 第2方向
19 レール
20 多関節アーム
21 第1アーム部
22 第2アーム部
23,23A,23B ハンド
25 回転軸
26 第1アーム回転駆動機構
27 昇降駆動機構
28 第2アーム回転駆動機構
31 第1ハンド回転駆動機構
32 第2ハンド回転駆動機構
35 回転駆動機構
36 昇降駆動機構
37 進退駆動機構
38 進退方向
381 前進方向
382 後退方向
40 ハンド
41 回転台
42 ハンド進退機構
43 昇降機構
50 ユニット本体
51 X軸気体ノズル
52 X軸気体ノズル
53 Y軸気体ノズル
54 Y軸気体ノズル
55 Z軸気体ノズル
56 加速度センサ
60 コントローラ
63 気体供給源
64 気体供給路
70 第1アーム動作補助ユニット
71,72 気体ノズル
73 加速度センサ
80 第2アーム動作補助ユニット
81,82 気体ノズル
83 加速度センサ
90A,90B ハンド動作補助ユニット
91〜93 気体ノズル
94 加速度センサ
101〜103 ハンド気体ノズル
104 加速度センサ
107,108 基台部気体ノズル
109 加速度センサ
101,102,103 ハンド気体ノズル
A 鉛直軸線
B 鉛直軸線
C 鉛直軸線
D 鉛直軸線
P 基板受け渡し位置
W 基板
θ 傾斜角
【技術分野】
【0001】
この発明は、基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法に関する。搬送対象または処理対象の基板には、たとえば、半導体ウエハ、液晶表示装置用基板、プラズマディスプレイ用基板、FED(Field Emission Display)用基板、光ディスク用基板、磁気ディスク用基板、光磁気ディスク用基板、フォトマスク用基板、セラミック基板、太陽電池用基板などが含まれる。
【背景技術】
【0002】
半導体基板や液晶表示装置用基板に代表される基板を処理する基板処理装置は、処理対象の基板を搬送する基板搬送装置を備えている。基板搬送装置は、基板を保持するハンドと、ハンドを移動させるハンド駆動機構とを備えている。ハンド駆動機構は、たとえば、複数のアーム部を結合した多関節アームと、この多関節アームに駆動力を与えるモータとを含む。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−152490号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
単位時間当たりの基板処理枚数を増やすために基板搬送速度を高めるには、ハンドを高速に移動させなければならない。したがって、移動開始時および停止時には、ハンドおよびそれに保持された基板に大きな加速度が生じ、それに応じて、大きな慣性力が働く。この大きな慣性力のために、移動開始時に遅れが生じ、かつ停止時にはハンドが振動する。とくに、多関節アームを伸張した状態では、ハンドが多関節アームの回動支点(回動軸)から大きく離れているため、大きな振動が生じやすく、かつその振動が収束しにくい。
【0005】
また、多関節アームを伸張させた状態では、多関節アームおよびハンドの自重のために、ハンドが垂れ下がり、基板を水平に保持することができない。この問題は、多関節アームの構成部材の剛性を高めることによって解決できるかもしれないが、コスト高となるうえ、重量が増すので、それに応じて高速駆動が困難になる。
そこで、この発明の目的は、基板の高速搬送に適した基板搬送装置およびそれを用いた基板処理装置を提供することである。また、この発明の他の目的は、基板の高速搬送に適した基板搬送方法を提供することである。
【課題を解決するための手段】
【0006】
上記の目的を達成するための請求項1記載の発明は、基板を保持するハンド(23)と、前記ハンドを駆動するハンド駆動機構(20,26,27,28,31,32,16,17)と、前記ハンドに備えられ、前記ハンドの動作を補助するように気体を噴射する気体ノズル(51〜55,91〜93,101〜103)とを含む、基板搬送装置である。なお、括弧内の英数字は後述の実施形態における対応構成要素等を表すが、特許請求の範囲を実施形態に限定する趣旨ではない。以下、この項において同じ。
【0007】
この構成によれば、ハンドに備えられた気体ノズルから気体を噴射することによって、その噴射による反力がハンドに加わり、それによって、ハンドの動作が補助される。すなわち、ハンドに加わる反力により、ハンドの動きを加速したり、ハンドの動きを減速したり、ハンドの姿勢を変化させたりすることができる。したがって、ハンドに働く慣性力等を気体ノズルからの気体噴射により生じる反力によって打ち消すことができるので、ハンド駆動機構の剛性を高めなくても、ハンドを高速移動させるときの加速および減速を、遅れや振動を抑制して円滑に行える。
【0008】
請求項2記載の発明は、前記気体ノズルが、前記ハンドの動作を加速するように気体を噴射する加速ノズル(51〜55,91〜93,101〜103)を含む、請求項1に記載の基板搬送装置である。この構成により、ハンドを速やかに加速することができるので、ハンドの動作速度が速やかに最高速に達する。これにより、基板を高速搬送できる。加速ノズルは、ハンドの動作方向と正反対の方向に気体を噴射するように構成されていることが好ましい。これにより、気体の噴射による反力がハンドの動作方向に作用するので、ハンドを効果的に加速できる。
【0009】
請求項3記載の発明は、前記気体ノズルが、前記ハンドの動作を制動するように気体を噴射する制動ノズル(51〜55,91〜93,101〜103)を含む、請求項1または2に記載の基板搬送装置である。この構成によれば、ハンドを速やかに減速することができるので、速やかにハンドを停止させることができ、停止時のハンドの振動を抑制できる。これにより、基板の高速搬送に寄与できる。制動ノズルは、ハンドの動作方向に気体を噴射するように構成されていることが好ましい。これにより、気体の噴射による反力がハンドの動作方向と正反対の方向に作用するので、効果的にハンドを制動できる。
【0010】
請求項4記載の発明は、前記気体ノズルが、水平面に沿う方向に気体を噴射する水平方向ノズル(51〜54,91,92,101,102)を含む、請求項1〜3のいずれか一項に記載の基板搬送装置である。この構成により、水平方向ノズルにより気体を噴射したときに水平方向の反力が生じ、この反力がハンドに作用する。これにより、ハンドの水平方向動作(とくに加速または減速)を効率的に補助することができる。
【0011】
請求項5記載の発明は、前記気体ノズルが、下向きに気体を噴射する抗重力ノズル(55,93,103)を含む、請求項1〜4のいずれか一項に記載の基板搬送装置である。この構成によれば、抗重力ノズルからの気体の噴射による反力によって、重力に抗してハンドを持ち上げることができる。これにより、ハンドが上方に移動開始するときの加速動作を補助したり、ハンドが下方に移動して停止するときの減速動作を補助したりすることができる。
【0012】
また、たとえば、長いアームの先端にハンドが取り付けられている場合、ハンド等の自重のために、アームが曲がり、ハンドの高さが低くなったり、ハンドの姿勢が傾斜(その結果、たとえばハンドに保持された基板が水平面に対して傾斜)したりするおそれがある。そこで、抗重力ノズルから気体を噴射してハンドに対して上向きの力を作用させることによって、ハンドを持ち上げたり、その姿勢を矯正したりすることができる。より具体的には、たとえば、水平方向に屈伸する多関節アームの先端にハンドが取り付けられている場合に、多関節アームを伸張させたときのハンドの垂れ下がりを抑制できる。これにより、ハンドを水平面に沿って移動させることができ、かつハンドの姿勢を保持(その結果、たとえば基板を水平姿勢に保持)できる。
【0013】
前記抗重力ノズルは、ハンドに取り付けられていることが好ましい。これにより、ハンドの姿勢を効率的に矯正できる。
請求項6記載の発明は、前記ハンドの加速度を検出する加速度検出手段(56,94,104)と、前記加速度検出手段によって検出される加速度に応じて前記気体ノズルからの気体の噴射を制御する噴射制御手段(60)とをさらに含む、請求項1〜5のいずれか一項に記載の基板搬送装置である。この構成により、ハンドの加速度(すなわち、その加速度によって生じる慣性力)に応じて、ハンドの動作を補助するように気体ノズルによる気体の噴射が行われる。したがって、ハンドの動作を適切に補助することができる。より具体的には、前記噴射制御手段は、前記加速度検出手段の出力に基づいて前記気体ノズルからの気体の噴射(たとえば噴射量)をフィードバック制御するように構成(プログラム)されていてもよい。
【0014】
請求項7記載の発明は、前記ハンド駆動機構は、互いに回動可能に結合された複数のアーム部(21,22)を有する多関節アーム(20)を備え、前記ハンドが、前記多関節アームに結合されており、前記複数のアーム部の少なくとも一つに備えられ、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ノズル(71,72,81,82)をさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置である。
【0015】
この構成によれば、多関節アームを構成するアーム部の動作が、アーム動作補助ノズルからの気体噴射によって得られる反力によって補助される。したがって、ハンドだけでなくアーム部の動作も補助されるので、より高速な基板搬送が可能になり、かつ停止時等の振動も一層抑制される。また、多関節アームの剛性を高めることなく高速搬送が可能なので、コストの大幅な増加を伴うこともなく、かつ、重量が大幅に増加することもない。
【0016】
前記アーム動作補助ノズルは、アーム部の先端部に設けられることが好ましい。さらに、前記アーム動作補助ノズルは、前記アーム部の先端部の回動経路上における各位置での接線方向(回動経路の接線方向)に平行な方向に気体を噴射するように構成されていることが好ましい。前記アーム動作補助ノズルは、アーム部の先端部の動作を加速するアーム加速ノズル(71,72,81,82)を含むことが好ましい。また、前記アーム動作補助ノズルは、アーム部の先端部の動作を制動するアーム制動ノズル(71,72,81,82)を含むことが好ましい。
【0017】
請求項8記載の発明は、前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部(15)と、前記基台部に備えられ、当該基台部の動作を補助するように気体を噴射する基台部動作補助ノズル(107,108)とをさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置である。
この構成により、基台部動作補助ノズルからの気体の噴射により得られる反力によって、基台部の動作を補助できる。したがって、基台部の加速および/または減速を速やかに行うことができるから、基台部の動作開始時に最高速に達するまでの時間を短縮でき、かつ基台部を短時間で停止させることができる。これによって、基板の高速搬送に寄与できる。前記基台部動作補助ノズルは、基台部の走行方向(搬送経路)に平行な方向に気体を噴射するように構成されていることが好ましい。より具体的には、基台部動作補助ノズルは、基台部の走行方向とは反対方向に気体を噴射して基台部を加速する基台部加速ノズル、および/または基台部の走行方向に気体を噴射して基台部を制動する基台部制動ノズルを含むことが好ましい。
【0018】
請求項9記載の発明は、請求項1〜8のいずれか一項に記載の基板搬送装置(7)と、前記基板搬送装置によって搬送される基板を処理する処理ユニット(3)とを含む、基板処理装置である。この構成により、基板の搬送速度を高めることができるので、基板処理速度を高めることができ、その結果、基板を用いた製品の生産性を高めることができる。
請求項10記載の発明は、基板を保持するハンドをハンド駆動機構によって駆動するステップと、前記ハンドに備えられた気体ノズルから気体を噴射して、前記ハンドの動作を補助する気体噴射ステップとを含む、基板搬送方法である。この方法により、請求項1の発明と同様の作用効果を実現できる。
【0019】
請求項11記載の発明は、前記気体噴射ステップが、前記ハンドの動作を加速するように前記気体ノズルから気体を噴射する加速ステップを含む、請求項10に記載の基板搬送方法である。この方法により、請求項2の発明と同様の作用効果を実現できる。
請求項12記載の発明は、前記気体噴射ステップが、前記ハンドの動作を制動するように前記気体ノズルから気体を噴射する制動ステップを含む、請求項10または11に記載の基板搬送方法である。この方法により、請求項3の発明と同様の作用効果を実現できる。
【0020】
請求項13記載の発明は、前記気体噴射ステップが、前記気体ノズルから水平面に沿う方向に気体を噴射する水平方向噴射ステップを含む、請求項10〜12のいずれか一項に記載の基板搬送方法である。この方法により、請求項4の発明と同様の作用効果を実現できる。
請求項14記載の発明は、前記気体噴射ステップが、前記気体ノズルから下向きに気体を噴射する抗重力噴射ステップを含む、請求項10〜13のいずれか一項に記載の基板搬送方法である。この方法により、請求項5の発明と同様の作用効果を実現できる。
【0021】
請求項15記載の発明は、前記ハンドの加速度を検出する加速度検出ステップをさらに含み、前記気体噴射ステップが、前記加速度検出ステップによって検出される加速度に応じて前記気体ノズルから気体を噴射するステップを含む、請求項10〜14のいずれか一項に記載の基板搬送方法である。この方法により、請求項6の発明と同様の作用効果を実現できる。
【0022】
請求項16記載の発明は、前記ハンド駆動機構が、互いに回動可能に結合された複数のアーム部を有する多関節アームを備え、前記ハンドが、前記多関節アームに結合されており、前記複数のアーム部の少なくとも一つに備えられたアーム動作補助ノズルから、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ステップをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法である。この方法により、請求項7の発明と同様の作用効果を実現できる。
【0023】
請求項17記載の発明は、前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部に備えられた基台部動作補助ノズルから、当該基台部の動作を補助するように気体を噴射する基台部動作補助ステップとをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法である。この方法により、請求項8の発明と同様の作用効果を実現できる。
【図面の簡単な説明】
【0024】
【図1】図1は、この発明の一実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。
【図2】図2Aはインデクサロボットの図解的な側面図であり、図2Bはインデクサロボット7の図解的な平面図である。
【図3】図3は、動作補助ユニットの構成を図解した拡大図である。
【図4】図4は、多関節アームを伸張させたときの撓みを説明するための図である。
【図5】図5は、インデクサロボットの動作制御に関連する構成を示すブロック図である。
【図6】図6は、インデクサロボットの制御に関するコントローラの制御ブロック図である。
【図7】図7Aは、この発明の第2の実施形態に係るインデクサロボットを説明するための図解的な側面図であり、図7Bは、その図解的な平面図である。
【図8】図8は、前記第2の実施形態に係るインデクサロボットの動作制御に関連する構成を示すブロック図である。
【図9】図9は、インデクサロボットの制御に関するコントローラの制御ブロック図である。
【図10】図10Aは、この発明の第3の実施形態に係るインデクサロボットの構成を説明するための図解的な斜視図であり、図10Bは、ハンドの下方から見た斜視図である。
【図11】図11は、前記第3の実施形態に係るインデクサロボットの動作制御に関連する構成を示すブロック図である。
【図12】図12は、インデクサロボットの制御に関するコントローラの制御ブロック図である。
【図13】図13は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第4の実施形態)である。
【図14】図14は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第5の実施形態)である。
【発明を実施するための形態】
【0025】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、この発明の一実施形態に係る基板処理装置のレイアウトを説明するための図解的な平面図である。この基板処理装置は、半導体ウエハや液晶表示パネル用ガラス基板等の基板Wを処理するための装置である。この基板処理装置は、基板処理モジュール1と、この基板処理モジュール1に結合されたインデクサモジュール2とを備えている。
【0026】
基板処理モジュール1は、平面的に配列された4つの処理ユニット3と、この4つの処理ユニット3に取り囲まれるように中央に配置された主搬送ロボット4とを備えている。主搬送ロボット4は、処理ユニット3に対して、未処理の基板Wを搬入し、処理済の基板Wを処理ユニット3から搬出するための搬入/搬出動作を行う。
一方、インデクサモジュール2は、複数枚の基板Wを収容することができるカセット5が載置されるカセット載置台6と、このカセット載置台6に置かれたカセット5にアクセスして基板の搬入/搬出を行い、さらに、主搬送ロボット4との間で基板の受け渡しを行うインデクサロボット7とを備えている。
【0027】
主搬送ロボット4は、基板Wを保持することができる一対のハンド40と、これらの一対のハンド40を保持した回転台41と、回転台41内に収容されたハンド進退機構42と、回転台41を上下動させる昇降機構43とを含む。この構成により、主搬送ロボット4は、回転台41を鉛直軸線回りに回転させて、ハンド40をいずれかの処理ユニット3または基板受け渡し位置Pに対向させる。そして、ハンド進退機構42の働きによって、ハンド40をそれらの搬送先に対して進退させる。また、昇降機構43の働きによって、ハンド40を上下動させ、それによって、それらの搬送先との間で基板Wの受け渡しを実行する。
【0028】
インデクサロボット7は、基台部11と、基台部11に保持された多関節アーム20と、多関節アーム20に結合された一対のハンド23(23A,23B)図1では上下に重なり合っていて、上方側の一つのハンドのみが示されている。)とを含む。多関節アーム20は、第1アーム部21と、第2アーム部22とを含む。第1アーム部21は、その基端部が基台部11に鉛直軸線まわりの回動が可能であるように結合されている。第2アーム部22は、その基端部が第1アーム部21の先端部に対して鉛直軸線回りの回動が可能であるように結合されている。第2アーム部22の先端部は、各1枚の基板Wを保持する一対ハンド23が、それぞれ鉛直軸線まわりの回動が可能であるように結合されている。
【0029】
インデクサロボット7は、カセット載置台6に置かれたいずれかのカセット5から未処理の1枚の基板Wを搬出する。インデクサロボット7は、カセット5から取り出した未処理の基板Wを受け渡し位置Pにおいて主搬送ロボット4に渡す。主搬送ロボット4は、インデクサロボット7から受け取った未処理の基板Wを、複数の処理ユニット3のうちのいずれかに搬入する。一方、主搬送ロボット4は、処理済の基板Wを処理ユニット3から取り出して、この処理済の基板Wを受け渡し位置Pにおいてインデクサロボット7へと渡す。インデクサロボット7は、主搬送ロボット4から受け取った処理済の基板Wをいずれかのカセット5に収容する。
【0030】
なお、受け渡し位置Pにおける基板Wの受け渡しは、インデクサロボット7と主搬送ロボット4との間で直接受け渡す構成であってもよいし、受け渡し位置Pに基板を載置する基板載置台が設置され、インデクサロボット7および主搬送ロボット4が基板載置台に基板Wを載置し、基板載置台に載置された基板Wを受け取る構成であってもよい。
図2Aはインデクサロボット7の図解的な側面図であり、図2Bはインデクサロボット7の図解的な平面図である。多関節アーム20の第1アーム部21の基端部は、鉛直方向に延びた回転軸25に結合されている。回転軸25は、基台部11に対して、回転および上下動可能に結合されている。回転軸25は、第1アーム回転駆動機構26によって鉛直軸線Aまわりに回動され、昇降駆動機構27によって上下動されるように構成されている。第2アーム部22の基端部は、第1アーム部21の先端部に対して、当該第1アーム部21の先端部を通る鉛直軸線Bまわりに回動可能に結合されている。そして、第2アーム部22は、第2アーム回転駆動機構28によって、鉛直軸線Bまわりに回動されるように構成されている。一対のハンド23A,23Bは、異なる高さ位置に配置されており、それらの基端部は、第2アーム部22の先端部に対して、当該第2アーム部22の先端部を通る共通の鉛直軸線Cまわりに回動可能に結合されている(ただし、図2Bでは図示の都合上、ハンド23A,23Bおよび鉛直軸線Cをずらして描いてある)。そして、一対のハンド23A,23Bは、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32によって、鉛直軸線Cまわりに、互いに独立に回動されるように構成されている。
【0031】
第1アーム回転駆動機構26が回転軸25を鉛直軸線Aまわりに回動することにより、第1アーム部21は、その基端部を回動中心として、鉛直軸線Aまわりに水平方向へと揺動する。また、昇降駆動機構27が回転軸25を上下動させることにより、第1アーム部21が上下動し、それによって、多関節アーム20およびそれに結合されたハンド23が一体的に上下動する。第2アーム回転駆動機構28が第2アーム部22を鉛直軸線Bまわりに回動すると、第2アーム部22は、鉛直軸線Bまわりに水平方向へと揺動する。さらに、第1および第2ハンド回転駆動機構31,32が、ハンド23A,23Bを鉛直軸線Cまわりにそれぞれ回動すると、ハンド23A,23Bは、鉛直軸線Cまわりに水平方向へとそれぞれ揺動する。これらの第1および第2アーム部21,22およびハンド23A,23Bの動作の組み合わせによって、ハンド23A,23Bを任意のカセット5および基板受け渡し位置Pに対してアクセスさせることができる。
【0032】
ハンド23A,23Bとカセット5との間の基板Wの受け渡しは、ハンド23A,23Bがカセット5内に進入した状態で、昇降駆動機構27が多関節アーム20を微小距離だけ上下動させることによって達成される。すなわち、ハンド23A,23Bは、カセット5内の基板保持棚から基板Wをすくい取ったり、カセット5内の基板保持棚に基板Wを置いたりすることができる。基板受け渡し位置Pにおける主搬送ロボット4との基板受け渡しも同様にして行うことができる。むろん、多関節アーム20を上下動する代わりに、またその上下動と並行して、主搬送ロボット4のハンド40を上下動させることによっても、基板Wの受け渡しを行える。
【0033】
ハンド23A,23B(以下、総称するときには「ハンド23」という。)には、それぞれ動作補助ユニット10A,10B(以下、総称するときには「動作補助ユニット10」という。)が取り付けられている。動作補助ユニット10は、ハンド23の動作を補助するように構成されている。動作補助ユニット10は、たとえば、ハンド23の下面に固定されている。
【0034】
図3は、動作補助ユニット10の構成を図解した拡大図である。動作補助ユニット10は、ユニット本体50と、気体ノズル51〜55と、加速度センサ56(加速度検出手段)とを含む。気体ノズル51〜55は、X軸気体ノズル51,52と、Y軸気体ノズル53,54と、Z軸気体ノズル55とを含み、これらは、ユニット本体50に固定されている。X軸気体ノズル51,52は、ハンド23によって保持される基板Wの主面に平行な平面(理想的には水平面)に沿う一方向であるX軸方向に平行な方向に沿って気体(たとえば空気)を噴射する水平方向ノズルである。さらに具体的には、一つのX軸気体ノズル51は、X軸方向に気体を噴射し、もう一つのX軸気体ノズル52は、X軸方向とは正反対の反X軸方向に気体を噴射するように構成されている。Y軸気体ノズル53,54は、ハンド23によって保持される基板Wの主面に平行な平面(理想的には水平面)に沿う他の方向であり、X軸と直交するY軸方向に平行な方向に沿って気体(たとえば空気)を噴射する水平方向ノズルである。さらに具体的には、一つのY軸気体ノズル53は、Y軸方向に気体を噴射し、もう一つのY軸気体ノズル54は、Y軸方向とは正反対の反Y軸方向に気体を噴射するように構成されている。Z軸気体ノズル55は、ハンド23によって保持される基板Wの主面に垂直な方向(理想的には鉛直方向)であるZ軸方向と平行に気体を噴射するように構成されている。より具体的には、Z軸気体ノズル55は、上向き方向であるZ軸方向とは正反対の下向き方向である反Z軸方向に向けて気体を噴射する抗重力ノズルである。
【0035】
ユニット本体50は、ハンド23に固定されているので、ハンド23の姿勢に応じて、X軸、Y軸、およびZ軸の各方向が変化する。具体的には、X軸およびY軸は、ハンド23の向きに応じて鉛直軸線まわりに回動し得る軸である。また、ハンド23の水平姿勢が変化すれば、Z軸は、鉛直方向からずれるように回動し得る。
加速度センサ56は、ハンド23に作用する加速度(慣性力と言い換えることもできる。)を検出するように構成されている。加速度センサ56は、この実施形態では、X軸方向の加速度、Y軸方向の加速度、およびZ軸方向の加速度を検出する。
【0036】
ハンド23がX軸方向への動作を開始または加速するとき、加速度センサ56は、X軸方向の加速度(反X軸方向への慣性力)を検出する。ハンド23がX軸方向への動作を減速または停止するとき、加速度センサ56は、反X軸方向の加速度(X軸方向への慣性力)を検出する。ハンド23が反X軸方向への動作を開始または加速するとき、加速度センサ56は、反X軸方向の加速度(X軸方向への慣性力)を検出する。ハンド23が反X軸方向への動作を減速または停止するとき、加速度センサ56は、X軸方向の加速度(反X軸方向への慣性力)を検出する。
【0037】
同様に、ハンド23がY軸方向への動作を開始または加速するとき、加速度センサ56は、Y軸方向の加速度(反Y軸方向への慣性力)を検出する。ハンド23がY軸方向への動作を減速または停止するとき、加速度センサ56は、反Y軸方向の加速度(Y軸方向への慣性力)を検出する。ハンド23が反Y軸方向への動作を開始または加速するとき、加速度センサ56は、反Y軸方向の加速度(Y軸方向への慣性力)を検出する。ハンド23が反Y軸方向への動作を減速または停止するとき、加速度センサ56は、Y軸方向の加速度(反Y軸方向への慣性力)を検出する。
【0038】
また、加速度センサ56は、重力加速度をZ軸方向に正射影した加速度成分を検出する。さらに、ハンド23がZ軸方向への動作(上昇)を開始または加速するとき、加速度センサ56は、重力加速度に加えてZ軸方向の加速度(反Z軸方向への慣性力)を検出する。ハンド23がZ軸方向への動作を減速または停止するとき、加速度センサ56は、重力加速度に加えて反Z軸方向の加速度(Z軸方向への慣性力)を検出する。ハンド23が反Z軸方向への動作(下降)を開始または加速するとき、加速度センサ56は、重力加速度に加えて反Z軸方向の加速度(Z軸方向への慣性力)を検出する。ハンド23が反Z軸方向への動作を減速または停止するとき、加速度センサ56は、重力加速度に加えて、Z軸方向の加速度(反Z軸方向への慣性力)を検出する。
【0039】
たとえば、図4に誇張して示すように、第1および第2アーム部21,22を展開して多関節アーム20を伸張させたときに多関節アーム20が重力によって下方に撓むと、ハンド23は、先端側の垂れ下がった傾斜姿勢となる。このとき、Z軸方向は、重力加速度gが作用する鉛直方向に対して傾斜角θをなす。よって、加速度センサ56は、Z軸方向の加速度として、g・cosθを検出する。したがって、Z軸方向加速度の検出値g・cosθを重力加速度gと比較することによって、ハンド23の姿勢(傾斜角θ)を検出できる。
【0040】
図5は、インデクサロボット7の動作制御に関連する構成を示すブロック図である。昇降駆動機構27、第1アーム回転駆動機構26、第2アーム回転駆動機構28、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32は、コントローラ60によって制御される。さらに、コントローラ60は、動作補助ユニット10(10A,10B)の動作を制御するように構成(プログラム)されている。より具体的には、加速度センサ56の出力信号がコントローラ60に入力されている。また、コントローラ60は、気体ノズル51〜55による気体の噴射を制御する噴射制御手段としての機能を有している。気体ノズル51〜55には、気体供給源63から加圧された気体(たとえば空気、窒素その他の不活性ガス)が、気体供給路64を介して供給されている。コントローラ60は、気体ノズル51〜55から噴射される気体の噴射量、噴射時間、噴射流量および噴射圧力から選択した一つまたは二つ以上の噴射制御量を制御するように構成(プログラム)されていてもよい。
【0041】
図6は、インデクサロボット7の制御に関するコントローラ60の制御ブロック図である。コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて駆動機構26〜28,31,32の各駆動源(たとえばサーボモータ)の制御量(姿勢制御量)を求めて、その制御量に応じて当該駆動源を制御する。これにより駆動源が駆動されると、インデクサロボット7の挙動に変化が生じる。一方、コントローラ60は、ハンド23の目標位置と現在位置との偏差に応じて、フィードフォワード制御量を求める。さらに、インデクサロボット7の挙動(加速度)が加速度センサ56によって検出され、その検出値に基づいて、コントローラ60は、フィードバック制御量を求める。さらに、コントローラ60は、フィードフォワード制御量およびフィードバック制御量に基づいて、各気体ノズル51〜55の噴射制御量(たとえば噴射量)を求める。この求められた噴射制御量に基づいて各気体ノズル51〜55が制御されて、気体が噴射される。気体の噴射によって生じた反力がハンド23に作用すると、これにより、インデクサロボット7の挙動に変化がもたらされる。この変化が、さらに、加速度センサ56によって検出される。
【0042】
フィードフォワード制御量は、ハンド23が現在位置から目標位置まで移動される過程でハンド23に働くと予測される慣性力を打ち消すための噴射制御量である。フィードフォワード制御を行うことで、フィードバック制御における応答遅れを補償して、制御の応答性を高めることができる。
フィードバック制御量は、加速度センサ56によって実際に検出されている慣性力を打ち消すための噴射制御量である。フィードバック制御を行うことで、ハンド23の実際の挙動に対応した噴射制御量を設定できる。
【0043】
ハンドの現在位置および目標位置は、回転軸25の上下位置、第1アーム部21の回転位置、第2アーム部22の回転位置、およびハンド23の回転位置によって表されてもよい。それぞれの位置は、昇降駆動機構27、第1アーム回転駆動機構26、第2アーム回転駆動機構28、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32の駆動源としての電動モータの制御位置(たとえば制御ステップ数)によって表されてもよい。
【0044】
具体的な制御内容について説明すると、ハンド23が動作開始または加速するときには、その動作方向への加速度が発生し、それに応じて、その動作方向と正反対の方向への慣性力が生じる。そこで、気体ノズル51〜55は、その動作方向への反力が生じるように、気体を噴射する。すなわち、気体ノズル51〜55は、ハンド23の動作を加速するように気体を噴射する加速ノズルとして機能する。また、ハンド23が減速または動作停止するときには、その動作方向とは反対方向への加速度が発生し、それに応じて、その動作方向への慣性力が生じる。そこで、気体ノズル51〜55は、その動作方向とは反対方向への反力が生じるように、気体を噴射する。すなわち、気体ノズル51〜55は、ハンド23の動作を制動するように気体を噴射する制動ノズルとして機能する。
【0045】
たとえば、X軸方向にハンド23が動作開始または加速するときは、X軸気体ノズル52から、反X軸方向に気体が噴射される。これにより、その気体の噴射による反力がX軸方向に作用するから、X軸方向へのハンド23の動作が補助される。反X軸方向にハンド23が動作開始または加速するときは、X軸気体ノズル51から、X軸方向に気体が噴射される。これにより、その気体の噴射による反力が反X軸方向に作用するから、反X軸方向へのハンド23の動作が補助される。一方、X軸方向へのハンド23の動作を減速または停止するときは、X軸気体ノズル51から、X軸方向に気体が噴射される。これにより、その気体の噴射による反力が反X軸方向に作用するから、X軸方向へのハンド23の動作が制動される。同様に、反X軸方向へのハンド23の動作を減速または停止するときは、X軸気体ノズル52から、反X軸方向に気体が噴射される。これにより、その気体の噴射による反力がX軸方向に作用するから、反X軸方向へのハンド23の動作が制動される。
【0046】
Y軸に関しても同様であり、Y軸方向にハンド23が動作開始または加速するときは、Y軸気体ノズル54から、反Y軸方向に気体が噴射される。これにより、その気体の噴射による反力がY軸方向に作用するから、Y軸方向へのハンド23の動作が補助される。反Y軸方向にハンド23が動作開始または加速するときは、Y軸気体ノズル53から、Y軸方向に気体が噴射される。これにより、その気体の噴射による反力が反Y軸方向に作用するから、反Y軸方向へのハンド23の動作が補助される。一方、Y軸方向へのハンド23の動作を減速または停止するときは、Y軸気体ノズル53から、Y軸方向に気体が噴射される。これにより、その気体の噴射による反力が反Y軸方向に作用するから、Y軸方向へのハンド23の動作が制動される。同様に、反Y軸方向へのハンド23の動作を減速または停止するときは、Y軸気体ノズル54から、反Y軸方向に気体が噴射される。これにより、その気体の噴射による反力がY軸方向に作用するから、反Y軸方向へのハンド23の動作が制動される。
【0047】
X軸またはY軸のいずれとも平行でない方向にハンド23が動作開始もしくは加速するとき、または減速もしくは動作停止するときは、その方向に応じた比で、X軸気体ノズル51,52とY軸気体ノズル53,54との噴射制御量をそれぞれ設定すればよい。これにより、ハンド23の動作方向への加速を補助したり、その動作方向への動作を制動したりすることができる。
【0048】
Z軸気体ノズル55は、多関節アーム20を上昇させるときに気体を噴射して、多関節アーム20およびハンド23の上移動を補助するように制御されてもよい(加速ノズルとしての働き)。また、Z軸気体ノズル55は、多関節アーム20を下降して停止させるときに気体を噴射して、多関節アーム20およびハンド23の下移動を制動するように制御されてもよい(制動ノズルとしての働き)。さらに、Z軸気体ノズル55は、多関節アーム20を伸展させるときに、多関節アーム20の撓みに起因するハンド23の姿勢変化を抑制するように、気体を噴射するように制御されてもよい。
【0049】
以上のように、この実施形態によれば、ハンド23に備えられた気体ノズル51〜55から気体を噴射することによって、その噴射による反力がハンド23に加わり、それによって、ハンド23の動作が補助される。すなわち、ハンド23に加わる反力により、ハンド23の動きを加速したり、ハンド23の動きを減速したり、ハンド23の姿勢を変化させたりすることができる。したがって、ハンド23に働く慣性力等を気体ノズル51〜55からの気体噴射により生じる反力によって打ち消すことができるので、多関節アーム20の構成部品等の剛性を高めなくても、ハンド23を高速移動させるときの加速および減速を、遅れや振動を抑制して円滑に行える。
【0050】
また、気体の噴射によってハンド23を加速できるので、ハンド23を速やかに加速することができ、ハンド23の動作速度が速やかに最高速に達する。これにより、基板Wを高速搬送できる。また、気体の噴射によってハンド23を速やかに減速することができるので、速やかにハンド23を停止させることができ、かつ、停止時のハンド23の振動を抑制できる。これにより、基板の高速搬送に寄与できる。
【0051】
図7Aは、この発明の第2の実施形態に係るインデクサロボットを説明するための図解的な側面図であり、図7Bは、その図解的な平面図である。これらの図7Aおよび7Bにおいて、前述の図2Aおよび2Bに示された各部に対応する部分には、同一の参照符号を付して示す。
このインデクサロボットは、図1に示した基板処理装置において、図2Aおよび図2Bに示した基板処理装置におけるインデクサロボット7として用いることができるものである。この実施形態のインデクサロボット7は、第1の実施形態の場合と同様に、ハンド23A,23B、多関節アーム20、第1アーム回転駆動機構26、昇降駆動機構27、第2アーム回転駆動機構28、第1ハンド回転駆動機構31、および第2ハンド回転駆動機構32を含む。この実施形態のインデクサロボット7では、第1アーム部21の先端部に、気体ノズル71,72(アーム動作補助ノズル)と、加速度センサ73とが配置されている。また、第2アーム部22の先端部に、気体ノズル81,82(アーム動作補助ノズル)と、加速度センサ83とが配置されている。さらに、ハンド23A,23Bのそれぞれの先端部に、気体ノズル91,92,93と、加速度センサ94とが配置されている。
【0052】
気体ノズル71,72は、平面視において、第1アーム部21の先端部が鉛直軸線Aを中心に回動するときの経路(円弧状経路)の接線方向(第1アーム部21の先端部の位置における接線方向)に沿ってほぼ水平方向に気体を噴射するように、第1アーム部21の先端部に固定されている。気体ノズル71,72は、互いに正反対方向に気体を噴射するように構成されている。より具体的には、気体ノズル71は、平面視において反時計回り方向に気体を噴射する。したがって、気体ノズル71が気体を噴射したときの反力は、第1アーム部21に対して時計回り方向に作用する。これにより、第1アーム部21の時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第1アーム部21の反時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。一方、気体ノズル72は、平面視において時計回り方向に気体を噴射する。したがって、気体ノズル72が気体を噴射したときの反力は、第1アーム部21に対して反時計回り方向に作用する。これにより、第1アーム部21の反時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第1アーム部21の時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。
【0053】
加速度センサ73は、平面視において、第1アーム部21の先端部が鉛直軸線Aを中心に回動するときの経路(円弧状経路)の接線方向(第1アーム部21の先端部の位置における接線方向)に沿って設定されたほぼ水平な検出方向に沿う加速度(慣性力)を検出するように、第1アーム部21の先端部に固定されている。これにより、加速度センサ73は、平面視において時計回り方向および反時計回り方向の加速度を検出するように構成されている。
【0054】
気体ノズル81,82は、平面視において、第2アーム部22の先端部が鉛直軸線Bを中心に回動するときの経路(円弧状経路)の接線方向(第2アーム部22の先端部の位置における接線方向)に沿ってほぼ水平方向に気体を噴射するように、第2アーム部22の先端部に固定されている。気体ノズル81,82は、互いに正反対方向に気体を噴射するように構成されている。より具体的には、気体ノズル81は、平面視において反時計回り方向に気体を噴射する。したがって、気体ノズル81が気体を噴射したときの反力は、第2アーム部22に対して時計回り方向に作用する。これにより、第2アーム部22の時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第2アーム部22の反時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。一方、気体ノズル82は、平面視において時計回り方向に気体を噴射する。したがって、気体ノズル82が気体を噴射したときの反力は、第2アーム部22に対して反時計回り方向に作用する。これにより、第2アーム部22の反時計回り方向の動作を加速したり(アーム加速ノズルとしての働き)、第2アーム部22の時計回り方向の動作を制動したりすることができる(アーム制動ノズルとしての働き)。
【0055】
加速度センサ83は、平面視において、第2アーム部22の先端部が鉛直軸線Bを中心に回動するときの経路(円弧状経路)の接線方向(第2アーム部22の先端部の位置における接線方向)に沿って設定されたほぼ水平な検出方向に沿う加速度(慣性力)を検出するように、第2アーム部22の先端部に固定されている。これにより、加速度センサ83は、平面視において時計回り方向および反時計回り方向の加速度を検出するように構成されている。
【0056】
気体ノズル91,92は、水平方向ノズルであり、平面視において、ハンド23(23A,23B)の先端部が鉛直軸線Cを中心に回動するときの経路(円弧状経路)の接線方向(ハンド23の先端部の位置における接線方向)に沿ってほぼ水平方向に気体を噴射するように、ハンド23の先端部に固定されている。気体ノズル91,92は、互いに正反対方向に気体を噴射するように構成されている。より具体的には、気体ノズル91は、平面視において反時計回り方向に気体を噴射する。したがって、気体ノズル91が気体を噴射したときの反力は、ハンド23に対して時計回り方向に作用する。これにより、ハンド23の時計回り方向の動作を加速したり(加速ノズルとしての働き)、ハンド23の反時計回り方向の動作を制動したりすることができる(制動ノズルとしての働き)。一方、気体ノズル92は、平面視において時計回り方向に気体を噴射する。したがって、気体ノズル92が気体を噴射したときの反力は、ハンド23に対して反時計回り方向に作用する。これにより、ハンド23の反時計回り方向の動作を加速したり(加速ノズルとしての働き)、ハンド23の時計回り方向の動作を制動したりすることができる(制動ノズルとしての働き)。
【0057】
気体ノズル93は、ハンド23が保持する基板Wの主面に垂直なZ軸に沿って気体を噴射するようにハンド23の先端部に固定された抗重力ノズルである。この気体ノズル93は、第1の実施形態におけるZ軸気体ノズル55と同様な働きを有している。すなわち、気体ノズル93から気体が噴射されると、それによって生じる反力は、ハンド23の先端部を重力に抗して持ち上げる。これにより、多関節アーム20を伸展させたときに、ハンド23が垂れ下がっても、ハンド23の姿勢を保持して、基板Wを水平姿勢に保持できる。また、多関節アーム20が上昇するときに気体ノズル93から気体を噴射すれば、ハンド23に働く下方向の慣性力を緩和または打ち消すことができるので、ハンド23を速やかに動作開始させたり、加速したりすることができる(加速ノズルとしての働き)。さらに、多関節アーム20が下降して停止するときに気体ノズル93から気体を噴射すれば、ハンド23に働く下方向の慣性力を緩和または打ち消すことができるので、ハンド23を速やかに、かつ振動を抑制しながら動作停止させることができる(制動ノズルとしての働き)。
【0058】
加速度センサ94は、平面視において、ハンド23の先端部が鉛直軸線Cを中心に回動するときの経路(円弧状経路)の接線方向(ハンド23の先端部の位置における接線方向)に沿って設定されたほぼ水平な検出方向に沿う加速度(慣性力)を検出するように、ハンド23の先端部に固定されている。これにより、加速度センサ94は、平面視において時計回り方向および反時計回り方向の加速度を検出するように構成されている。加速度センサ94は、さらに、前記Z軸に平行に作用する加速度を検出するように構成されている。加速度センサ94は、ハンド23の静止状態においては、重力加速度gのZ軸成分(Z軸への正射影)を検出する。また、ハンド23が上下動するときは、重力加速度gと慣性力に対応する加速度との合成加速度を検出する。したがって、加速度センサ94は、第1の実施形態における加速度センサ56と同様の働きを有している。
【0059】
第1の実施形態の動作補助ユニット10と同様に、気体ノズル71,72および加速度センサ73が第1のユニット本体に一体的に保持されて第1アーム動作補助ユニット70を構成していてもよい。同様に、気体ノズル91,92および加速度センサ83が第2のユニット本体に一体的に保持されて第2アーム動作補助ユニット80を構成していてもよい。さらに、気体ノズル91,92,93および加速度センサ94が第3のユニット本体に一体的に保持されてハンド動作補助ユニット90(ハンド23A,23Bにそれぞれ対応したユニット90A,90B)を構成していてもよい。むろん、このようなユニット化がされていなくてもよい。また、たとえば、複数のノズルをユニット化する一方で、加速度センサを別ユニットとしてもよい。
【0060】
図8は、前記第2の実施形態に係るインデクサロボット7の動作制御に関連する構成を示すブロック図である。図8において、前述の図5に示された各部に対応する部分には、図5と同一参照符号を付して示す。昇降駆動機構27、第1アーム回転駆動機構26、第2アーム回転駆動機構28、第1ハンド回転駆動機構31および第2ハンド回転駆動機構32は、コントローラ60によって制御される。さらに、コントローラ60は、第1アーム動作補助ユニット70、第2アーム動作補助ユニット80、およびハンド動作補助ユニット90(90A,90B)の動作を制御するように構成(プログラム)されている。より具体的には、加速度センサ73,83,94の出力信号がコントローラ60に入力されている。また、コントローラ60は、気体ノズル71,72,81,82,91〜93による気体の噴射を制御する。気体ノズル71,72,81,82,91〜93には、気体供給源63から加圧された気体(たとえば空気、窒素その他の不活性ガス)が、気体供給路64を介して供給されている。コントローラ60は、気体ノズル71,72,81,82,91〜93から噴射される気体の噴射量、噴射時間、噴射流量および噴射圧力から選択した一つまたは二つ以上の噴射制御量を制御するように構成(プログラム)されていてもよい。
【0061】
図9は、インデクサロボット7の制御に関するコントローラ60の制御ブロック図である。コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて駆動機構26〜28,31,32の各駆動源(たとえばサーボモータ)の制御量(姿勢制御量)を求めて、その制御量に応じて当該駆動源を制御する。そして、駆動源の駆動結果が、インデクサロボット7(第1アーム部21,第2アーム部22およびハンド23)の挙動に反映される。一方、コントローラ60は、ハンド23の目標位置と現在位置との偏差に応じて、第1アーム部21、第2アーム部22およびハンド23にそれぞれ対応したフィードフォワード制御量を求める。さらに、インデクサロボット7の挙動(加速度)が加速度センサ73,83,94によって検出され、その検出値に基づいて、コントローラ60は、第1アーム部21、第2アーム部22およびハンド23にそれぞれ対応したフィードバック制御量を求める。さらに、コントローラ60は、フィードフォワード制御量およびフィードバック制御量に基づいて、各気体ノズル71,72,81,82,91〜93の噴射制御量(たとえば噴射量)を求める。この求められた噴射量に基づいて、各気体ノズル71,72,81,82,91〜93が制御されて、気体が噴射される。気体の噴射によって生じた反力が第1アーム部21、第2アーム部22およびハンド23のいずれかに作用すると、これにより、インデクサロボット7(第1アーム部21、第2アーム部22およびハンド23)の挙動に変化がもたらされる。この変化が、さらに、加速度センサ73,83,94によって検出される。第1アーム部21の挙動は、第2アーム部22の挙動に影響し、さらに第2アーム部22の挙動はハンド23の挙動に影響する。
【0062】
フィードフォワード制御量は、ハンド23が現在位置から目標位置まで移動される過程で第1および第2アーム部21,22ならびにハンド23にそれぞれ働くと予測される慣性力を打ち消すための噴射制御量である。フィードフォワード制御を行うことで、フィードバック制御における応答遅れを補償して、制御の応答性を高めることができる。
フィードバック制御量は、加速度センサ73,83,94によって実際に検出されている慣性力を打ち消すための噴射制御量である。フィードバック制御を行うことで、第1および第2アーム部21,22ならびにハンド23の実際の挙動に対応した噴射制御量を設定できる。
【0063】
具体的な制御について説明すると、第1アーム部21が動作開始または加速するときには、その動作方向への加速度が発生し、それに応じて、その動作方向と正反対の方向への慣性力が生じる。第2アーム部22およびハンド23についても同様である。そこで、気体ノズル71,72,81,82,91〜93は、その動作方向への反力が生じるように、気体を噴射する。この場合、気体ノズル71,72,81,82,91〜93は、アーム部21,22またはハンド23の動作を加速するように気体を噴射する加速ノズルとして機能する。また、第1アーム部21が減速または動作停止するときには、その動作方向とは反対方向への加速度が発生し、それに応じて、その動作方向への慣性力が生じる。第2アーム部22およびハンド23についても同様である。そこで、気体ノズル71,72,81,82,91〜93は、その動作方向とは反対方向への反力が生じるように、気体を噴射する。すなわち、気体ノズル71,72,81,82,91〜93は、ハンド23の動作を制動するように気体を噴射する制動ノズルとして機能する。
【0064】
たとえば、第1アーム部21が平面視において時計回り方向に回動開始または加速するときは、気体ノズル71から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、時計回り方向への第1アーム部21の回動が補助(加速)される。反時計回り方向に第1アーム部21が回動開始または加速するときは、気体ノズル72から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、反時計回り方向への第1アーム部21の回動が補助(加速)される。一方、反時計回り方向への第1アーム部21の回動を減速または停止するときは、気体ノズル71から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、反時計回り方向への第1アーム部21の回動が制動される。同様に、時計回り方向への第1アーム部21の回動を減速または停止するときは、気体ノズル72から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、時計回り方向への第1アーム部21の回動が制動される。
【0065】
第2アーム部22に関しても同様である。すなわち、第2アーム部22が平面視において時計回り方向に回動開始または加速するときは、気体ノズル81から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、時計回り方向への第2アーム部22の回動が補助(加速)される。反時計回り方向に第2アーム部22が回動開始または加速するときは、気体ノズル82から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、反時計回り方向への第2アーム部22の回動が補助(加速)される。一方、反時計回り方向への第2アーム部22の回動を減速または停止するときは、気体ノズル81から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、反時計回り方向への第2アーム部22の回動が制動される。同様に、時計回り方向への第2アーム部22の回動を減速または停止するときは、気体ノズル82から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、時計回り方向への第2アーム部22の回動が制動される。
【0066】
ハンド23の回動に関しても同様である。すなわち、ハンド23が平面視において時計回り方向に回動開始または加速するときは、気体ノズル91から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、時計回り方向へのハンド23の回動が補助(加速)される。反時計回り方向にハンド23が回動開始または加速するときは、気体ノズル92から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、反時計回り方向へのハンド23の回動が補助(加速)される。一方、反時計回り方向へのハンド23の回動を減速または停止するときは、気体ノズル91から、反時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が時計回り方向に作用するから、反時計回り方向へのハンド23の回動が制動される。同様に、時計回り方向へのハンド23の回動を減速または停止するときは、気体ノズル92から、時計回り方向に気体が噴射される。これにより、その気体の噴射による反力が反時計回り方向に作用するから、時計回り方向へのハンド23の回動が制動される。
【0067】
ハンド23に固定されたもう一つの気体ノズル93は、多関節アーム20を上昇させるときに気体を噴射して、多関節アーム20およびハンド23の上移動を補助(加速)するように制御されてもよい。また、気体ノズル93は、多関節アーム20を下降して停止させるときに気体を噴射して、多関節アーム20およびハンド23の下移動を制動するように制御されてもよい。さらに、気体ノズル93は、多関節アーム20を伸展させるときに、多関節アーム20の撓みに起因するハンド23の姿勢変化を抑制するように、気体を噴射するように制御されてもよい。
【0068】
以上のように、この実施形態によれば、多関節アーム20を構成するアーム部21,22の動作が、気体ノズル71,72,81,82からの気体噴射によって得られる反力によって補助される。したがって、ハンド23だけでなくアーム部21,22の動作も補助されるので、より高速な基板搬送が可能になり、かつ停止時等の振動も一層抑制される。また、多関節アーム20の剛性を高めることなく高速搬送が可能なので、コストの大幅な増加を伴うこともなく、かつ、重量が大幅に増加することもない。その他、第1の実施形態と同様の効果が得られる。
【0069】
図10Aは、この発明の第3の実施形態に係るインデクサロボット7の構成を説明するための図解的な斜視図であり、図10Bは、ハンド23の下方から見た斜視図である。このインデクサロボット7は、基台部15と、横移動機構16と、ハンド駆動機構17と、一対のハンド23A,23Bとを含む。
基台部15は、横移動方向18に沿って敷設されたレール19上を、当該横移動方向18に平行な搬送経路に沿って走行可能に構成されている。横移動方向18は、図1に示す基板処理装置において、カセット載置台6の配列方向(カセット配列方向)に平行に設定される。横移動機構16は、ボールねじ機構等を含み、基台部15を横移動方向18に沿ってレール19上で往復走行(横移動)させる。ハンド駆動機構17は、一対のハンド23A,23Bを基台部15に対して鉛直軸線Dまわりに回転させる回転駆動機構35と、ハンド23A,23Bを基台部15に対して上下動させる昇降駆動機構36と、ハンド23A,23Bを独立して水平方向に進退させる進退駆動機構37とを含む。ハンド23A,23Bの進退方向38は、平面視において基台部15に対して接近/離反する水平方向であり、各ハンド23A,23Bの前後方向である。進退方向38は、ハンド23A,23Bの向きに従う方向なので、ハンド23A,23Bとともに鉛直軸線Dまわりに回転し得る方向である。
【0070】
横移動機構16によって基台部15をレール19上で走行させることによって、ハンド23をいずれかのカセット5または基板受け渡し位置P(図1参照)に正対(すなわち、平面視においてレール19に直交する方向に沿って対向)する位置まで移動することができる。また、回転駆動機構35によりハンド23を鉛直軸線Dまわりに回転させることにより、ハンド23の進退方向38を、正対したカセット5または基板受け渡し位置Pに向けることができる。さらに、昇降駆動機構36によってハンド23を上下動させることによって、カセット5または主搬送ロボット4との基板受け渡し高さにハンド23を配置でき、かつ、それらとの間で基板Wを受け渡しできる。
【0071】
ハンド23には、ハンド気体ノズル101,102,103が設けられている。それらのうちの2つのハンド気体ノズル101,102は、ハンド23の進退方向38に平行な水平方向に向けて気体を噴射するようにハンド23に固定された水平ノズルである。これらのハンド気体ノズル101,102は、進退方向38に沿って、互いに反対方向に気体を噴射するように構成されている。すなわち、一つのハンド気体ノズル101は、ハンド23の後方に向かって気体を噴射し、もう一つのハンド気体ノズル102は、ハンド23の前方に向かって気体を噴射する。さらにもう一つのハンド気体ノズル103は、下方に向けて気体を噴射するようにハンド23に固定された抗重力ノズルである。より詳細には、ハンド気体ノズル103は、ハンド23によって保持される基板Wの主面に直交するZ軸方向に沿って、下向きに気体を噴射する。
【0072】
ハンド23には、さらに、加速度センサ104が取り付けられている。加速度センサ104は、ハンド23の進退方向38に沿う方向の加速度と、Z軸方向に沿う加速度とを検出するように構成されている。
一方、基台部15には、横移動方向18に平行な方向に気体を噴射する2つの基台部気体ノズル107,108(基台部動作補助ノズル)が備えられている。さらに、基台部15には、横移動方向18に平行な水平方向に沿う加速度を検出する加速度センサ109が備えられている。
【0073】
図11は、前記第3の実施形態に係るインデクサロボット7の動作制御に関連する構成を示すブロック図である。図11において、前述の図5に示された各部に対応する部分には、図5と同一参照符号を付して示す。横移動機構16およびハンド駆動機構17(回転駆動機構35、昇降駆動機構36、進退駆動機構37)は、コントローラ60によって制御される。さらに、加速度センサ104,109の出力信号がコントローラ60に入力されている。また、コントローラ60は、気体ノズル101〜103,107,108による気体の噴射を制御する。気体ノズル101〜103,107,108には、気体供給源63から加圧された気体(たとえば空気、窒素その他の不活性ガス)が、気体供給路64を介して供給されている。コントローラ60は、気体ノズル101〜103,107,108から噴射される気体の噴射量、噴射時間、噴射流量および噴射圧力から選択した一つまたは二つ以上の噴射制御量を制御するように構成(プログラム)されていてもよい。
【0074】
図12は、インデクサロボット7の制御に関するコントローラ60の制御ブロック図である。コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて駆動機構16,17の各駆動源(たとえばサーボモータ)の制御量(姿勢制御量)を求め、その制御量に応じて当該駆動源を制御する。この制御が、インデクサロボット7の挙動(基台部15およびハンド23)に反映される。一方、コントローラ60は、ハンド23の目標位置と現在位置との偏差を求め、その偏差に応じて、基台部15の横移動およびハンド23の進退のためのフィードフォワード制御量を求める。さらに、ハンド23および基台部15の挙動(加速度)が加速度センサ104,109によって検出され、それらの検出値に基づいて、コントローラ60は、ハンド23の進退および基台部15の横移動のためのフィードバック制御量を求める。さらに、コントローラ60は、ハンド23の進退および基台部15の横移動のためのフィードフォワード制御量およびフィードバック制御量に基づいて、各気体ノズル101〜103,107,108の噴射制御量(たとえば噴射量)を求める。この求められた噴射量に基づいて、各気体ノズル101〜103,107,108が制御されて、気体が噴射される。気体の噴射によって生じた反力が基台部15およびハンド23のいずれかに作用すると、これによりインデクサロボット7の挙動に変化がもたらされる。この変化が、さらに、加速度センサ104,109によって検出される。基台部15の挙動は、ハンド23の挙動に影響を及ぼす。
【0075】
フィードフォワード制御量は、ハンド23が現在位置から目標位置まで移動される過程で基台部15およびハンド23に働くと予測される慣性力を打ち消すための噴射制御量である。フィードフォワード制御を行うことで、フィードバック制御における応答遅れを補償して、制御の応答性を高めることができる。
フィードバック制御量は、加速度センサ104,109によって実際に検出されている慣性力を打ち消すための噴射制御量である。フィードバック制御を行うことで、基台部15およびハンド23の実際の挙動に対応した噴射制御量を設定できる。
【0076】
具体的な制御について説明すると、基台部15が動作開始または加速するときには、その動作方向への加速度が発生し、それに応じて、その動作方向と正反対の方向への慣性力が生じる。ハンド23についても同様である。そこで、101〜103,107,108は、その動作方向への反力が生じるように、気体を噴射する。
たとえば、基台部15が横移動方向18に平行な第1方向181に移動開始または加速するときは、基台部気体ノズル107から、横移動方向18に平行な第2方向182(第1方向181の正反対方向)に向けて気体が噴射される。これにより、その気体の噴射による反力が第1方向181に作用するから、第1方向181への基台部15の移動が補助(加速)される(基台部加速ノズルとしての働き)。基台部15が第2方向182に移動開始または加速するときは、基台部気体ノズル108から、第1方向181に向けて気体が噴射される。これにより、その気体の噴射による反力が第2方向182に作用するから、第2方向182への基台部15の移動が補助(加速)される(基台部加速ノズルとしての働き)。一方、第1方向181への基台部15の移動を減速または停止するときは、基台部気体ノズル108から、第1方向181に気体が噴射される。これにより、その気体の噴射による反力が第2方向182に作用するから、基台部15の第1方向181への移動が制動される(基台部制動ノズルとしての働き)。同様に、第2方向182への基台部15の移動を減速または停止するときは、基台部気体ノズル107から、第2方向182に気体が噴射される。これにより、その気体の噴射による反力が第1方向181に作用するから、第2方向182への基台部15の移動が制動される(基台部制動ノズルとしての働き)。
【0077】
また、前進方向381にハンド23が動作開始または加速するときは、ハンド気体ノズル101から、後退方向382に向けて気体が噴射される。これにより、その気体の噴射による反力が前進方向381に作用するから、前進方向381へのハンド23の動作が補助(加速)される(加速ノズルとしての働き)。後退方向382にハンド23が動作開始または加速するときは、ハンド気体ノズル102から、前進方向381に気体が噴射される。これにより、その気体の噴射による反力が後退方向382に作用するから、後退方向382へのハンド23の動作が補助(加速)される(加速ノズルとしての働き)。一方、前進方向381へのハンド23の動作を減速または停止するときは、ハンド気体ノズル102から、前進方向381に気体が噴射される。これにより、その気体の噴射による反力が後退方向382に作用するから、前進方向381へのハンド23の動作が制動される(制動ノズルとしての働き)。同様に、後退方向382へのハンド23の動作を減速または停止するときは、ハンド気体ノズル101から、後退方向382に気体が噴射される。これにより、その気体の噴射による反力が前進方向381に作用するから、後退方向382へのハンド23の動作が制動される(制動ノズルとしての働き)。
【0078】
ハンド23に固定されたもう一つのハンド気体ノズル103は、ハンド23を上昇させるときに気体を噴射して、ハンド23の上移動を補助するように制御されてもよい。また、気体ノズル103は、ハンド23を下降して停止させるときに気体を噴射して、ハンド23の下移動を制動するように制御されてもよい。さらに、気体ノズル103は、ハンド23を前進させるときに、ハンド23および基板Wの自重に起因するハンド23の姿勢変化を抑制するように、気体を噴射するように制御されてもよい。
【0079】
以上のように、この実施形態によれば、基台部気体ノズル107,108からの気体の噴射により得られる反力によって、基台部15の動作を補助できる。したがって、基台部15の加速および/または減速を速やかに行うことができるから、基台部15の動作開始時に最高速に達するまでの時間を短縮でき、かつ基台部15を短時間で停止させることができる。これによって、基板Wの高速搬送に寄与できる。
【0080】
図13は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第4の実施形態)である。図6の制御構成では、フィードフォワード制御およびフィードバック制御が併用されているのに対して、図13の制御構成では、フィードバック制御が省かれている。この制御構成を採用する場合には、加速度センサを省くことができる。
図14は、図6の制御構成に代えて用いることができる制御構成を示す制御ブロック図(第5の実施形態)である。図6の制御構成では、フィードフォワード制御およびフィードバック制御が併用されているに対して、図14の制御構成では、フィードフォワード制御が省かれている。
【0081】
以上、この発明の5つの実施形態について説明してきたが、この発明は、さらに他の形態で実施することもできる。たとえば、前述の実施形態では、ハンド等の移動開始時および加速時の加速と、ハンド等の減速時および停止時の制動との両方を気体噴射によって補助しているが、加速のみまたは制動のみを気体噴射によって補助するようにしてもよい。また、前述の実施形態では、抗重力ノズルを備えた例を示したが、抗重力ノズルを省いてもよい。さらに、前述の第1および第2の実施形態では、第1アーム部21および第2アーム部22を有する多関節アーム20を例示したが、3つ以上のアーム部を連結した多関節アームを用いてもよい。その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0082】
1 基板処理モジュール
2 インデクサモジュール
3 処理ユニット
4 主搬送ロボット
5 カセット
6 カセット載置台
7 インデクサロボット
10A,10B 動作補助ユニット
11 基台部
15 基台部
16 横移動機構
17 ハンド駆動機構
18 横移動方向
181 第1方向
182 第2方向
19 レール
20 多関節アーム
21 第1アーム部
22 第2アーム部
23,23A,23B ハンド
25 回転軸
26 第1アーム回転駆動機構
27 昇降駆動機構
28 第2アーム回転駆動機構
31 第1ハンド回転駆動機構
32 第2ハンド回転駆動機構
35 回転駆動機構
36 昇降駆動機構
37 進退駆動機構
38 進退方向
381 前進方向
382 後退方向
40 ハンド
41 回転台
42 ハンド進退機構
43 昇降機構
50 ユニット本体
51 X軸気体ノズル
52 X軸気体ノズル
53 Y軸気体ノズル
54 Y軸気体ノズル
55 Z軸気体ノズル
56 加速度センサ
60 コントローラ
63 気体供給源
64 気体供給路
70 第1アーム動作補助ユニット
71,72 気体ノズル
73 加速度センサ
80 第2アーム動作補助ユニット
81,82 気体ノズル
83 加速度センサ
90A,90B ハンド動作補助ユニット
91〜93 気体ノズル
94 加速度センサ
101〜103 ハンド気体ノズル
104 加速度センサ
107,108 基台部気体ノズル
109 加速度センサ
101,102,103 ハンド気体ノズル
A 鉛直軸線
B 鉛直軸線
C 鉛直軸線
D 鉛直軸線
P 基板受け渡し位置
W 基板
θ 傾斜角
【特許請求の範囲】
【請求項1】
基板を保持するハンドと、
前記ハンドを駆動するハンド駆動機構と、
前記ハンドに備えられ、前記ハンドの動作を補助するように気体を噴射する気体ノズルとを含む、基板搬送装置。
【請求項2】
前記気体ノズルが、前記ハンドの動作を加速するように気体を噴射する加速ノズルを含む、請求項1に記載の基板搬送装置。
【請求項3】
前記気体ノズルが、前記ハンドの動作を制動するように気体を噴射する制動ノズルを含む、請求項1または2に記載の基板搬送装置。
【請求項4】
前記気体ノズルが、水平面に沿う方向に気体を噴射する水平方向ノズルを含む、請求項1〜3のいずれか一項に記載の基板搬送装置。
【請求項5】
前記気体ノズルが、下向きに気体を噴射する抗重力ノズルを含む、請求項1〜4のいずれか一項に記載の基板搬送装置。
【請求項6】
前記ハンドの加速度を検出する加速度検出手段と、
前記加速度検出手段によって検出される加速度に応じて前記気体ノズルからの気体の噴射を制御する噴射制御手段とをさらに含む、請求項1〜5のいずれか一項に記載の基板搬送装置。
【請求項7】
前記ハンド駆動機構が、互いに回動可能に結合された複数のアーム部を有する多関節アームを備え、
前記ハンドが、前記多関節アームに結合されており、
前記複数のアーム部の少なくとも一つに備えられ、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ノズルをさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置。
【請求項8】
前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部と、
前記基台部に備えられ、当該基台部の動作を補助するように気体を噴射する基台部動作補助ノズルとをさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置。
【請求項9】
請求項1〜8のいずれか一項に記載の基板搬送装置と、
前記基板搬送装置によって搬送される基板を処理する処理ユニットとを含む、基板処理装置。
【請求項10】
基板を保持するハンドをハンド駆動機構によって駆動するステップと、
前記ハンドに備えられた気体ノズルから気体を噴射して、前記ハンドの動作を補助する気体噴射ステップとを含む、基板搬送方法。
【請求項11】
前記気体噴射ステップが、前記ハンドの動作を加速するように前記気体ノズルから気体を噴射する加速ステップを含む、請求項10に記載の基板搬送方法。
【請求項12】
前記気体噴射ステップが、前記ハンドの動作を制動するように前記気体ノズルから気体を噴射する制動ステップを含む、請求項10または11に記載の基板搬送方法。
【請求項13】
前記気体噴射ステップが、前記気体ノズルから水平面に沿う方向に気体を噴射する水平方向噴射ステップを含む、請求項10〜12のいずれか一項に記載の基板搬送方法。
【請求項14】
前記気体噴射ステップが、前記気体ノズルから下向きに気体を噴射する抗重力噴射ステップを含む、請求項10〜13のいずれか一項に記載の基板搬送方法。
【請求項15】
前記ハンドの加速度を検出する加速度検出ステップをさらに含み、
前記気体噴射ステップが、前記加速度検出ステップによって検出される加速度に応じて前記気体ノズルから気体を噴射するステップを含む、請求項10〜14のいずれか一項に記載の基板搬送方法。
【請求項16】
前記ハンド駆動機構が、互いに回動可能に結合された複数のアーム部を有する多関節アームを備え、
前記ハンドが、前記多関節アームに結合されており、
前記複数のアーム部の少なくとも一つに備えられたアーム動作補助ノズルから、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ステップをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法。
【請求項17】
前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部に備えられた基台部動作補助ノズルから、当該基台部の動作を補助するように気体を噴射する基台部動作補助ステップとをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法。
【請求項1】
基板を保持するハンドと、
前記ハンドを駆動するハンド駆動機構と、
前記ハンドに備えられ、前記ハンドの動作を補助するように気体を噴射する気体ノズルとを含む、基板搬送装置。
【請求項2】
前記気体ノズルが、前記ハンドの動作を加速するように気体を噴射する加速ノズルを含む、請求項1に記載の基板搬送装置。
【請求項3】
前記気体ノズルが、前記ハンドの動作を制動するように気体を噴射する制動ノズルを含む、請求項1または2に記載の基板搬送装置。
【請求項4】
前記気体ノズルが、水平面に沿う方向に気体を噴射する水平方向ノズルを含む、請求項1〜3のいずれか一項に記載の基板搬送装置。
【請求項5】
前記気体ノズルが、下向きに気体を噴射する抗重力ノズルを含む、請求項1〜4のいずれか一項に記載の基板搬送装置。
【請求項6】
前記ハンドの加速度を検出する加速度検出手段と、
前記加速度検出手段によって検出される加速度に応じて前記気体ノズルからの気体の噴射を制御する噴射制御手段とをさらに含む、請求項1〜5のいずれか一項に記載の基板搬送装置。
【請求項7】
前記ハンド駆動機構が、互いに回動可能に結合された複数のアーム部を有する多関節アームを備え、
前記ハンドが、前記多関節アームに結合されており、
前記複数のアーム部の少なくとも一つに備えられ、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ノズルをさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置。
【請求項8】
前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部と、
前記基台部に備えられ、当該基台部の動作を補助するように気体を噴射する基台部動作補助ノズルとをさらに含む、請求項1〜6のいずれか一項に記載の基板搬送装置。
【請求項9】
請求項1〜8のいずれか一項に記載の基板搬送装置と、
前記基板搬送装置によって搬送される基板を処理する処理ユニットとを含む、基板処理装置。
【請求項10】
基板を保持するハンドをハンド駆動機構によって駆動するステップと、
前記ハンドに備えられた気体ノズルから気体を噴射して、前記ハンドの動作を補助する気体噴射ステップとを含む、基板搬送方法。
【請求項11】
前記気体噴射ステップが、前記ハンドの動作を加速するように前記気体ノズルから気体を噴射する加速ステップを含む、請求項10に記載の基板搬送方法。
【請求項12】
前記気体噴射ステップが、前記ハンドの動作を制動するように前記気体ノズルから気体を噴射する制動ステップを含む、請求項10または11に記載の基板搬送方法。
【請求項13】
前記気体噴射ステップが、前記気体ノズルから水平面に沿う方向に気体を噴射する水平方向噴射ステップを含む、請求項10〜12のいずれか一項に記載の基板搬送方法。
【請求項14】
前記気体噴射ステップが、前記気体ノズルから下向きに気体を噴射する抗重力噴射ステップを含む、請求項10〜13のいずれか一項に記載の基板搬送方法。
【請求項15】
前記ハンドの加速度を検出する加速度検出ステップをさらに含み、
前記気体噴射ステップが、前記加速度検出ステップによって検出される加速度に応じて前記気体ノズルから気体を噴射するステップを含む、請求項10〜14のいずれか一項に記載の基板搬送方法。
【請求項16】
前記ハンド駆動機構が、互いに回動可能に結合された複数のアーム部を有する多関節アームを備え、
前記ハンドが、前記多関節アームに結合されており、
前記複数のアーム部の少なくとも一つに備えられたアーム動作補助ノズルから、当該アーム部の動作を補助するように気体を噴射するアーム動作補助ステップをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法。
【請求項17】
前記ハンド駆動機構を支持して搬送経路に沿って走行する基台部に備えられた基台部動作補助ノズルから、当該基台部の動作を補助するように気体を噴射する基台部動作補助ステップとをさらに含む、請求項10〜15のいずれか一項に記載の基板搬送方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−192504(P2012−192504A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−59512(P2011−59512)
【出願日】平成23年3月17日(2011.3.17)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月17日(2011.3.17)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
[ Back to top ]