
基板搬送装置
【課題】内部気圧の変動によるチャンバの変形によってもロボットハンドの位置変動がなく、かつ、比較的安価に実現可能な構造の基板搬送装置を提供する。
【解決手段】真空チャンバと、前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置であって、前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、Oリングを介して、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能して、取り付けられている。
【解決手段】真空チャンバと、前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置であって、前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、Oリングを介して、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能して、取り付けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、有機ELデバイスや液晶ディスプレイ等の表示装置等の大型の基板を真空成膜装置に搬送するための基板搬送装置に関し、特に、真空環境下でもその搬送位置が変化することなく、安定した基板の搬送を実現するための構造に関する。
【背景技術】
【0002】
例えば、有機ELデバイスを製造する方法として、一般に、真空蒸着法が広く採用されており、かかる真空蒸着法では、以下の特許文献1にも知られるように、所謂、真空に保持された蒸着チャンバ(以下、一般的に、「真空装置」と言う)内において、抵抗加熱や誘導加熱などの方法を用い、蒸発源から蒸着材料の蒸発速度を一定に保つように制御しながら、蒸着材料を加熱し物理蒸着(PVD)を行なうことが一般的である。
【0003】
なお、かかる真空装置により成膜を行う場合、大型の基板を、やはり、その内部が真空に保持されたチャンバ内に取り付けられた基板搬送装置であるロボットにより、当該真空装置に搬送される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010-62043号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
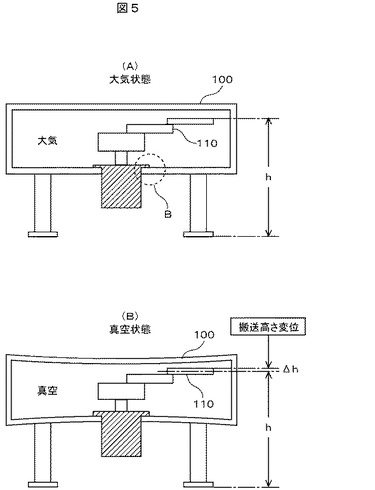
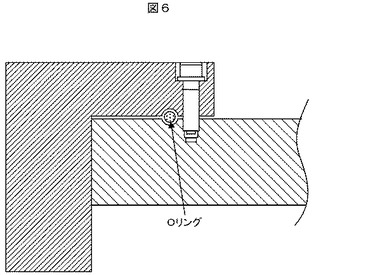
しかしながら、上述した特許文献1にも知られるように、その内部が真空に保持されたチャンバ100内に取り付けられた基板搬送装置であるロボット110により基板を搬送した場合、添付の図5にも示すように、チャンバ内部を大気状態から真空状態にした場合、当該ロボットが固定された真空チャンバが大気圧により変形してしまい、これに伴って、ロボットのハンドの位置が変動してしまう。即ち、当該チャンバの変形は、ロボットによる基板の搬送において、搬入される位置(特に、高さh)を変位させる要因となる。なお、図6は、当該ロボットを真空チャンバに固定する構造の一例、ここでは、ネジとOリングにより機密に固定する構造を示している。
【0006】
なお、従来、かかる問題に対しては、搬送される基板の高さにおける変位を許容可能な程度にまで抑制する手段として、例えば、チャンバの床面に多数のリブを取り付けて機械的な強度を増大し、もって、チャンバ自体の変形を抑制することが行われていたが、しかしながら、かかる手段によれば、チャンバのコストが上昇してしまうこととなる。
【0007】
そこで、本発明は、上述した従来技術における問題点に鑑みてなされたものであり、その目的は、内部の気圧の変動によるチャンバの変形によってもロボットハンドの位置(特に、高さ)が変動することのない、かつ、比較的安価に実現することが可能な構造の基板搬送装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するため、本発明によれば、まず、真空チャンバと、前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置であって、前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能にする手段を介して、取り付けられていること基板搬送装置が提供される。
【0009】
また、本発明によれば、前記に記載した基板搬送装置において、前記真空チャンバ内を気密に保持しかつ相互に移動可能にする手段は、Oリングであることが好ましい。
【0010】
更に、本発明では、前記記載した基板搬送装置において、前記Oリングは、前記搬送ロボットの駆動部の外壁面に取り付けられていること、又は、前記搬送ロボットの脚部の外壁面に取り付けられていることが好ましい。
【発明の効果】
【0011】
以上に述べた本発明によれば、内部の気圧の変動によるチャンバの変形によってもロボットハンドの位置(特に、高さ)が変動することがなく、かつ、比較的安価に実現することが可能な基板搬送装置が提供されるという優れた効果が達成されることとなる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態になる基板搬送装置(搬送チャンバ)が採用された成膜装置である有機ELデバイス製造装置の全体構成を示す上面図である。
【図2】上記有機ELデバイス製造装置の搬送チャンバを、隣接すると成膜装置である処理チャンバ共にその内部構成の一例を示す透視斜視図である。
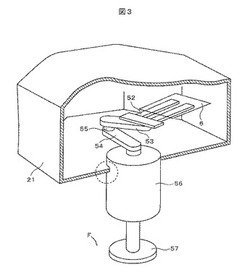
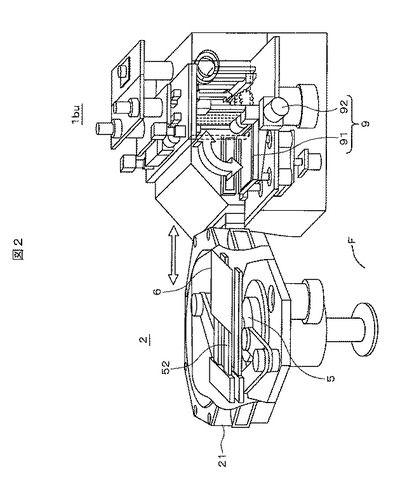
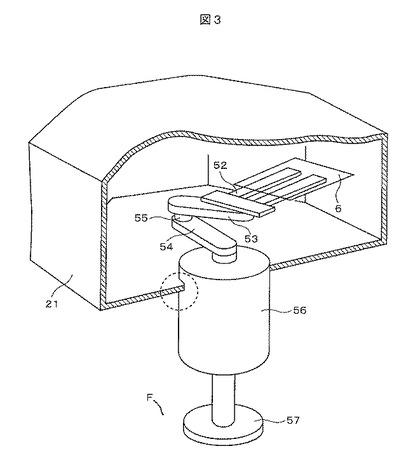
【図3】本発明の一実施の形態になる搬送チャンバの内部詳細構造を示すための一部断面を含む斜視図である。
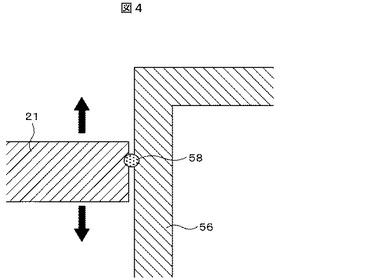
【図4】真空チャンバと搬送ロボット駆動部との間の気密持連結構造の一例を示す、上記図3における破線の丸Aで示した部分の拡大断面図である。
【図5】従来技術になる基板搬送装置(搬送チャンバ)の構造とその問題点を説明するための図である。
【図6】上記図における破線の丸Bで示した部分の拡大断面図である。
【発明を実施するための形態】
【0013】
以下、本発明の一実施の形態になる基板搬送装置を採用した真空装置を含んだ装置として、成膜装置、特に、有機ELデバイス用の大型の基板に有機EL材料を蒸着するための成膜装置について、添付の図を参照しながら詳細に説明する。
【0014】
まず、添付の図1は、本発明の一実施の形態になる基板搬送装置をその一部に利用した有機ELデバイス製造装置の一例を示しており、図において、当該有機ELデバイス製造装置100は、概略、処理対象(ワーク)である基板6を搬入するロードクラスタ3、基板をそれぞれ処理する4つのクラスタ(A〜D)、隣接するクラスタの間、又は、クラスタAとロードクラスタ3との間、更には、次工程(例えば、封止工程)との間の設置された、合計、5つの受渡室4a〜4eから構成されている。
【0015】
なお、ロードクラスタ3は、前後に真空を維持するためにゲート弁10を有するロードロック室31と、当該ロードロック室31から基板6を受け取り、これを旋回して受渡室4aに基板6を搬入する搬送ロボット5Rとからなる。また、各ロードロック室31及び各受渡室4a〜4eは、その前後にゲート弁10を有し、当該ゲート弁10の開閉を制御することにより、内部の真空を維持しながら、ロードクラスタ3、又は、次のクラスタ等に対して、上記基板6を受け渡しする。
【0016】
各クラスタ(A〜D)は、内部に一台の搬送ロボット5を有する搬送チャンバ2と、搬送ロボット5から基板を受け取って所定の処理を行う(図面上では、上下に配置されている)2つの処理チャンバ1(添え字「a」〜「d」はクラスタを示し、添え字「u」、「d」は上側/下側を示す)を有する。また、搬送チャンバ2と処理チャンバ1の間には、ゲート弁10が設けられている。
【0017】
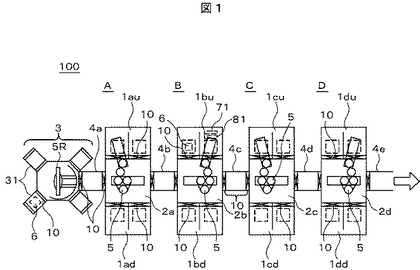
次に、添付の図2は、上述した有機ELデバイス製造装置の一部、特に、搬送チャンバ2と共に、その内部に有機EL材料を蒸着するための成膜装置を備えた処理(成膜)チャンバ1の構成を示す。なお、ここでは、処理チャンバの構成として、真空中で発光材料を蒸着して基板6上にEL層を形成するための真空蒸着チャンバ1buが示されている。
【0018】
真空蒸着チャンバ1buは、図にも示すように、大別して、発光材料を蒸発させ基板6に蒸着させる蒸着部7と、基板6の必要な部分に蒸着させるアライメント部8と、搬送チャンバ2内の搬送ロボット5との間で基板6の受け渡たしを行い、蒸着部7へ基板6を移動させる処理受渡部9によって構成されている。
【0019】
処理受渡部9は、搬送ロボット5の櫛歯状ハンド52と干渉することなく基板6を受渡し可能であり、かつ、基板6を固定する手段を有する櫛歯状ハンド(基板チャック)91と、前記櫛歯状ハンド52を旋回させて基板6を直立させアライメント部8に移動するハンド旋回駆動手段92を有する。なお、基板6を固定する手段としては、真空中であることを考慮して、例えば、電磁吸着やクリップ等が用いられる。
【0020】
また、搬送ロボット5は、以下にもその詳細を説明するが、上記搬送チャンバを構成する真空チャンバ21の内部に配置されており、即ち、真空環境下で基板の搬送を行う。
【0021】
図3は、成膜装置が設置される床面Fを含め、上述した真空チャンバ21とその内部に配置された搬送ロボット5の側面断面図を示しており、この図からも明らかなように、基板の搬送ロボット5は、上述した櫛歯状ハンド52と共に、当該櫛歯状ハンドを所望の位置に自在に移動するためのアーム53、54を備えており、それらの間には、互いの自在な回転を実現するためのジョイント55等が設けられている。
【0022】
また、アーム53、54の下方には、搬送ロボットを所定の位置に配置すると共に、当該アームに回転や伸長等の駆動力を与えるための電動モータや種々の機構等を含む、所謂、搬送ロボットの駆動部56が設けられている。そして、この外形が略円筒状の駆動部56の下面には、下方に伸びた脚部57が一体に取り付けられており、当該脚部57が床面Fに固定されることにより、搬送ロボット5の位置が決定される。
【0023】
続いて、図4には、上記図3において破線の丸で示した部分の拡大断面図、即ち、真空チャンバ21と搬送ロボットの駆動部56との間を気密に保持して連結するための構造の一例を示す。即ち、この例では、上記真空チャンバ21、より具体的には、その壁の端部が外形略円筒形の駆動部56と接触する部分、即ち、駆動部56の周囲に溝を設け、その内部に、例えば、ゴム製のOリング58を挿入し、当該Oリング58により、真空チャンバ21と駆動部56との間の気密を保持しながら、これら両者が互いに移動(摺動)可能に連結されている。
【0024】
これは、従来技術に関連して既に述べたように、真空チャンバ21の内部を大気状態から真空状態にした場合、当該真空チャンバの壁面が大気圧により変形してしまうことによる。即ち、本発明では、搬送ロボット5を成膜装置が設置される床面Fに固定する(図3を参照)と共に、その内部の圧力により変形する真空チャンバ21の壁面が、当該搬送ロボット5、特に、その駆動部56の壁面との間で、Oリング58により、チャンバ内部の気圧(真空)を保ちながら、かつ、上下に自在に移動(摺動)が可能に取り付けられている(図の矢印を参照)。このことによれば、真空チャンバが大気圧により変形しても、その壁面の移動が搬送ロボット5の位置に対して、例えば、上下の位置ずれ等の悪影響を及ぼすことがなく、即ち、安定した基板の搬送を実現する良好なロボット搬送を、比較的安価に実現することが可能となる。
【0025】
なお、上述した実施例では、特に、内部の気圧によりその壁面が移動する真空チャンバ21と床面Fに固定された搬送ロボット5との間を、その駆動部56において、チャンバ内の気密を保持して連結する構造について述べたが、しかしながら、本発明はこれに限定されることなく、例えば、搬送ロボット5の他の一部、例えば、脚部57の一部(特に、駆動部56の下面から下方に伸びた部分)により、上記と同様に、チャンバ内の気密を保持して連結することも可能である。更には、上記Oリング58に代えて、例えば、所謂、ラビリンス構造等を採用することにより、チャンバ内の気密を保持して連結することも可能であろう。
【符号の説明】
【0026】
5…搬送ロボット、6…基板、21…真空チャンバ、52…櫛歯状ハンド、53、54…アーム、55…ジョイント、56…駆動部、57…脚部、F…床面。
【技術分野】
【0001】
本発明は、例えば、有機ELデバイスや液晶ディスプレイ等の表示装置等の大型の基板を真空成膜装置に搬送するための基板搬送装置に関し、特に、真空環境下でもその搬送位置が変化することなく、安定した基板の搬送を実現するための構造に関する。
【背景技術】
【0002】
例えば、有機ELデバイスを製造する方法として、一般に、真空蒸着法が広く採用されており、かかる真空蒸着法では、以下の特許文献1にも知られるように、所謂、真空に保持された蒸着チャンバ(以下、一般的に、「真空装置」と言う)内において、抵抗加熱や誘導加熱などの方法を用い、蒸発源から蒸着材料の蒸発速度を一定に保つように制御しながら、蒸着材料を加熱し物理蒸着(PVD)を行なうことが一般的である。
【0003】
なお、かかる真空装置により成膜を行う場合、大型の基板を、やはり、その内部が真空に保持されたチャンバ内に取り付けられた基板搬送装置であるロボットにより、当該真空装置に搬送される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010-62043号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1にも知られるように、その内部が真空に保持されたチャンバ100内に取り付けられた基板搬送装置であるロボット110により基板を搬送した場合、添付の図5にも示すように、チャンバ内部を大気状態から真空状態にした場合、当該ロボットが固定された真空チャンバが大気圧により変形してしまい、これに伴って、ロボットのハンドの位置が変動してしまう。即ち、当該チャンバの変形は、ロボットによる基板の搬送において、搬入される位置(特に、高さh)を変位させる要因となる。なお、図6は、当該ロボットを真空チャンバに固定する構造の一例、ここでは、ネジとOリングにより機密に固定する構造を示している。
【0006】
なお、従来、かかる問題に対しては、搬送される基板の高さにおける変位を許容可能な程度にまで抑制する手段として、例えば、チャンバの床面に多数のリブを取り付けて機械的な強度を増大し、もって、チャンバ自体の変形を抑制することが行われていたが、しかしながら、かかる手段によれば、チャンバのコストが上昇してしまうこととなる。
【0007】
そこで、本発明は、上述した従来技術における問題点に鑑みてなされたものであり、その目的は、内部の気圧の変動によるチャンバの変形によってもロボットハンドの位置(特に、高さ)が変動することのない、かつ、比較的安価に実現することが可能な構造の基板搬送装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するため、本発明によれば、まず、真空チャンバと、前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置であって、前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能にする手段を介して、取り付けられていること基板搬送装置が提供される。
【0009】
また、本発明によれば、前記に記載した基板搬送装置において、前記真空チャンバ内を気密に保持しかつ相互に移動可能にする手段は、Oリングであることが好ましい。
【0010】
更に、本発明では、前記記載した基板搬送装置において、前記Oリングは、前記搬送ロボットの駆動部の外壁面に取り付けられていること、又は、前記搬送ロボットの脚部の外壁面に取り付けられていることが好ましい。
【発明の効果】
【0011】
以上に述べた本発明によれば、内部の気圧の変動によるチャンバの変形によってもロボットハンドの位置(特に、高さ)が変動することがなく、かつ、比較的安価に実現することが可能な基板搬送装置が提供されるという優れた効果が達成されることとなる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態になる基板搬送装置(搬送チャンバ)が採用された成膜装置である有機ELデバイス製造装置の全体構成を示す上面図である。
【図2】上記有機ELデバイス製造装置の搬送チャンバを、隣接すると成膜装置である処理チャンバ共にその内部構成の一例を示す透視斜視図である。
【図3】本発明の一実施の形態になる搬送チャンバの内部詳細構造を示すための一部断面を含む斜視図である。
【図4】真空チャンバと搬送ロボット駆動部との間の気密持連結構造の一例を示す、上記図3における破線の丸Aで示した部分の拡大断面図である。
【図5】従来技術になる基板搬送装置(搬送チャンバ)の構造とその問題点を説明するための図である。
【図6】上記図における破線の丸Bで示した部分の拡大断面図である。
【発明を実施するための形態】
【0013】
以下、本発明の一実施の形態になる基板搬送装置を採用した真空装置を含んだ装置として、成膜装置、特に、有機ELデバイス用の大型の基板に有機EL材料を蒸着するための成膜装置について、添付の図を参照しながら詳細に説明する。
【0014】
まず、添付の図1は、本発明の一実施の形態になる基板搬送装置をその一部に利用した有機ELデバイス製造装置の一例を示しており、図において、当該有機ELデバイス製造装置100は、概略、処理対象(ワーク)である基板6を搬入するロードクラスタ3、基板をそれぞれ処理する4つのクラスタ(A〜D)、隣接するクラスタの間、又は、クラスタAとロードクラスタ3との間、更には、次工程(例えば、封止工程)との間の設置された、合計、5つの受渡室4a〜4eから構成されている。
【0015】
なお、ロードクラスタ3は、前後に真空を維持するためにゲート弁10を有するロードロック室31と、当該ロードロック室31から基板6を受け取り、これを旋回して受渡室4aに基板6を搬入する搬送ロボット5Rとからなる。また、各ロードロック室31及び各受渡室4a〜4eは、その前後にゲート弁10を有し、当該ゲート弁10の開閉を制御することにより、内部の真空を維持しながら、ロードクラスタ3、又は、次のクラスタ等に対して、上記基板6を受け渡しする。
【0016】
各クラスタ(A〜D)は、内部に一台の搬送ロボット5を有する搬送チャンバ2と、搬送ロボット5から基板を受け取って所定の処理を行う(図面上では、上下に配置されている)2つの処理チャンバ1(添え字「a」〜「d」はクラスタを示し、添え字「u」、「d」は上側/下側を示す)を有する。また、搬送チャンバ2と処理チャンバ1の間には、ゲート弁10が設けられている。
【0017】
次に、添付の図2は、上述した有機ELデバイス製造装置の一部、特に、搬送チャンバ2と共に、その内部に有機EL材料を蒸着するための成膜装置を備えた処理(成膜)チャンバ1の構成を示す。なお、ここでは、処理チャンバの構成として、真空中で発光材料を蒸着して基板6上にEL層を形成するための真空蒸着チャンバ1buが示されている。
【0018】
真空蒸着チャンバ1buは、図にも示すように、大別して、発光材料を蒸発させ基板6に蒸着させる蒸着部7と、基板6の必要な部分に蒸着させるアライメント部8と、搬送チャンバ2内の搬送ロボット5との間で基板6の受け渡たしを行い、蒸着部7へ基板6を移動させる処理受渡部9によって構成されている。
【0019】
処理受渡部9は、搬送ロボット5の櫛歯状ハンド52と干渉することなく基板6を受渡し可能であり、かつ、基板6を固定する手段を有する櫛歯状ハンド(基板チャック)91と、前記櫛歯状ハンド52を旋回させて基板6を直立させアライメント部8に移動するハンド旋回駆動手段92を有する。なお、基板6を固定する手段としては、真空中であることを考慮して、例えば、電磁吸着やクリップ等が用いられる。
【0020】
また、搬送ロボット5は、以下にもその詳細を説明するが、上記搬送チャンバを構成する真空チャンバ21の内部に配置されており、即ち、真空環境下で基板の搬送を行う。
【0021】
図3は、成膜装置が設置される床面Fを含め、上述した真空チャンバ21とその内部に配置された搬送ロボット5の側面断面図を示しており、この図からも明らかなように、基板の搬送ロボット5は、上述した櫛歯状ハンド52と共に、当該櫛歯状ハンドを所望の位置に自在に移動するためのアーム53、54を備えており、それらの間には、互いの自在な回転を実現するためのジョイント55等が設けられている。
【0022】
また、アーム53、54の下方には、搬送ロボットを所定の位置に配置すると共に、当該アームに回転や伸長等の駆動力を与えるための電動モータや種々の機構等を含む、所謂、搬送ロボットの駆動部56が設けられている。そして、この外形が略円筒状の駆動部56の下面には、下方に伸びた脚部57が一体に取り付けられており、当該脚部57が床面Fに固定されることにより、搬送ロボット5の位置が決定される。
【0023】
続いて、図4には、上記図3において破線の丸で示した部分の拡大断面図、即ち、真空チャンバ21と搬送ロボットの駆動部56との間を気密に保持して連結するための構造の一例を示す。即ち、この例では、上記真空チャンバ21、より具体的には、その壁の端部が外形略円筒形の駆動部56と接触する部分、即ち、駆動部56の周囲に溝を設け、その内部に、例えば、ゴム製のOリング58を挿入し、当該Oリング58により、真空チャンバ21と駆動部56との間の気密を保持しながら、これら両者が互いに移動(摺動)可能に連結されている。
【0024】
これは、従来技術に関連して既に述べたように、真空チャンバ21の内部を大気状態から真空状態にした場合、当該真空チャンバの壁面が大気圧により変形してしまうことによる。即ち、本発明では、搬送ロボット5を成膜装置が設置される床面Fに固定する(図3を参照)と共に、その内部の圧力により変形する真空チャンバ21の壁面が、当該搬送ロボット5、特に、その駆動部56の壁面との間で、Oリング58により、チャンバ内部の気圧(真空)を保ちながら、かつ、上下に自在に移動(摺動)が可能に取り付けられている(図の矢印を参照)。このことによれば、真空チャンバが大気圧により変形しても、その壁面の移動が搬送ロボット5の位置に対して、例えば、上下の位置ずれ等の悪影響を及ぼすことがなく、即ち、安定した基板の搬送を実現する良好なロボット搬送を、比較的安価に実現することが可能となる。
【0025】
なお、上述した実施例では、特に、内部の気圧によりその壁面が移動する真空チャンバ21と床面Fに固定された搬送ロボット5との間を、その駆動部56において、チャンバ内の気密を保持して連結する構造について述べたが、しかしながら、本発明はこれに限定されることなく、例えば、搬送ロボット5の他の一部、例えば、脚部57の一部(特に、駆動部56の下面から下方に伸びた部分)により、上記と同様に、チャンバ内の気密を保持して連結することも可能である。更には、上記Oリング58に代えて、例えば、所謂、ラビリンス構造等を採用することにより、チャンバ内の気密を保持して連結することも可能であろう。
【符号の説明】
【0026】
5…搬送ロボット、6…基板、21…真空チャンバ、52…櫛歯状ハンド、53、54…アーム、55…ジョイント、56…駆動部、57…脚部、F…床面。
【特許請求の範囲】
【請求項1】
真空チャンバと、
前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置において、
前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能にする手段を介して、取り付けられていることを特徴とする基板搬送装置。
【請求項2】
前記請求項1に記載した基板搬送装置において、前記真空チャンバ内を気密に保持しかつ相互に移動可能にする手段は、Oリングであることを特徴とする基板搬送装置。
【請求項3】
前記請求項2に記載した基板搬送装置において、前記Oリングは、前記搬送ロボットの駆動部の外壁面に取り付けられていることを特徴とする基板搬送装置。
【請求項4】
前記請求項2に記載した基板搬送装置において、前記Oリングは、前記搬送ロボットの脚部の外壁面に取り付けられていることを特徴とする基板搬送装置。
【請求項1】
真空チャンバと、
前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置において、
前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能にする手段を介して、取り付けられていることを特徴とする基板搬送装置。
【請求項2】
前記請求項1に記載した基板搬送装置において、前記真空チャンバ内を気密に保持しかつ相互に移動可能にする手段は、Oリングであることを特徴とする基板搬送装置。
【請求項3】
前記請求項2に記載した基板搬送装置において、前記Oリングは、前記搬送ロボットの駆動部の外壁面に取り付けられていることを特徴とする基板搬送装置。
【請求項4】
前記請求項2に記載した基板搬送装置において、前記Oリングは、前記搬送ロボットの脚部の外壁面に取り付けられていることを特徴とする基板搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−77667(P2013−77667A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215986(P2011−215986)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]