
基板搬送装置
【課題】検査等の処理の精度を維持しつつ、効率的な処理を行うことができる基板搬送装置を提供すること。
【解決手段】基板Wの撮像処理を施す光学ユニット100と、基板Wを載置して、基板Wを搬送するステージ11とを有するFPD検査装置1であって、ステージ11の搬送方向Dに沿った外縁側に設けられ、搬送方向Dと平行に延びる搬送軸131に沿って基板Wを保持して搬送する第1搬送部132と、基板Wが光学ユニット100にかかる領域で搬送方向Dと平行に延びる搬送軸141に沿って基板Wを保持して搬送し、第1搬送部132と比して高い移動分解能を有する第2搬送部142と、第1搬送部132および第2搬送部142における基板Wの搬送を制御する搬送制御部35と、を備えた。
【解決手段】基板Wの撮像処理を施す光学ユニット100と、基板Wを載置して、基板Wを搬送するステージ11とを有するFPD検査装置1であって、ステージ11の搬送方向Dに沿った外縁側に設けられ、搬送方向Dと平行に延びる搬送軸131に沿って基板Wを保持して搬送する第1搬送部132と、基板Wが光学ユニット100にかかる領域で搬送方向Dと平行に延びる搬送軸141に沿って基板Wを保持して搬送し、第1搬送部132と比して高い移動分解能を有する第2搬送部142と、第1搬送部132および第2搬送部142における基板Wの搬送を制御する搬送制御部35と、を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、フラットパネルディスプレイ(FPD)用のガラス基板や各種半導体基板やプリント基板などを搬送して検査する基板搬送装置に関する。
【背景技術】
【0002】
近年、ガラス基板や各種半導体基板やプリント基板(以下、基板という)などの製造において、基板を搬送して検査等の処理を行う基板搬送装置がある。基板搬送装置は、撮像等によって基板の検査処理を行う検査処理部と、外部から検査処理部へ基板を搬送または検査処理部から外部へ基板を搬送する搬送ステージとを有する。
【0003】
検査処理部は、例えば、基板の表面や裏面に照明光を当て、カメラでその反射光や透過光を取り込んで検査対象領域の全体画像を取得する検査であるマクロ検査や、顕微鏡等を用いて基板上の所定箇所の配線パターン等の拡大画像をカメラで取得する検査であるミクロ検査を行う。マクロ検査は、例えば、ラインセンサカメラによって取得された基板の全体画像を用いて、基板上の欠陥、塗布膜のムラや、基板上の傷等の確認を行う。また、ミクロ検査の一種として、例えば、基板上に形成されたフォトレジスト等の膜厚や各種配線パターンの膜厚、液晶層からの透過光の着色を行うカラーフィルタ上に形成された各種部材の膜厚の測定が挙げられる。膜厚の測定は、一般的に、光源から基板に入力した光から発光スペクトルを取得して得られた屈折率等の薄膜情報を用いて行われる。
【0004】
搬送ステージは、基板を搬送する搬送面に複数の空気穴を有し、この空気穴から空気を吹き出すことによって基板を浮上させる浮上プレートと、基板を吸着保持する吸着パッドを有し、搬送方向に移動可能な搬送部とを備える。搬送部は、浮上プレートによって浮上した基板を、吸着パッドが吸着保持した状態で移動することで基板の搬送を行う。搬送部では、検査処理部の領域において、検査精度を維持するため、所定の等速性および移動分解能により高い精度の基板搬送が行われている。なお、基板の支持には、浮上プレートに代えて、搬送方向に沿って回転可能なフリーローラによって基板を支持する支持部材を用いる。
【0005】
ところで、上述した搬送ステージとして、読取対象物を載置する載置台と、載置台を移動自在に支持するスライド部材と、スライド部材を移動させる駆動モータと、駆動モータを制御して載置台を少なくとも2つの異なる速度で移動させることが可能な制御CPUと、を備えた読取装置が開示されている(例えば、特許文献1を参照)。
【0006】
また、液体を介して基板を露光するための露光光を射出する射出面を有する光学部材と、光学部材との間で液体を保持可能でかつ所定領域を移動可能な基板ステージと、光学部材との間で液体を保持する第1状態および保持しない第2状態とで移動速度が異なるように基板ステージの移動を制御する制御部と、を備えた露光装置が開示されている(例えば、特許文献2を参照)。
【0007】
上述した特許文献1,2に示す読取装置および露光装置では、載置台および基板ステージに載置される対象物に応じて、移動速度を変えて搬送することができる。これにより、読取処理や露光処理を効率的に行うことが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2006−47528号公報
【特許文献2】特開2009−182110号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
ところで、特許文献1が開示する読取装置にかかる搬送ステージを上述した基板搬送装置に適用した場合、基板搬送装置は、搬送による振動等の影響を考慮して、搬送経路全体として高精度の搬送を行う検査処理部に対応した一定の速度で基板を搬送する構成となる。しかしながら、搬送経路には、検査処理部に対応した速度よりも速い速度で基板を搬送可能な部分が含まれており、この搬送部分も一定の速度で基板を搬送すると、搬送における処理効率を低下させてしまうおそれがあった。また、特許文献2が開示する露光装置においても上述した基板搬送装置と同様に、搬送における処理効率を低下させてしまうおそれがあった。
【0010】
本発明は、上記に鑑みてなされたものであり、検査等の処理の精度を維持しつつ、効率的な処理を行うことができる基板搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した課題を解決し、目的を達成するために、本発明にかかる基板搬送装置は、搬送対象の基板に所定の処理を施す処理手段と、前記基板を載置して、該基板を搬送する搬送ステージとを有する基板搬送装置であって、前記搬送ステージの前記基板を搬送する搬送方向に沿った外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第1搬送部と、前記処理手段が前記基板に対して処理を施す処理領域で前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送し、前記第1搬送部と比して高い移動分解能を有する第2搬送部と、前記第1搬送部および前記第2搬送部における前記基板の搬送を制御する搬送制御部と、を備えたことを特徴とする。
【0012】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第2搬送部は、前記第1搬送部と比して高い等速性能を有することを特徴とする。
【0013】
また、本発明にかかる基板搬送装置は、上記の発明において、前記搬送制御部は、前記第1搬送部に前記第2搬送部と比して大きい速度で前記基板を搬送させることを特徴とする。
【0014】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第2搬送部は、前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられることを特徴とする。
【0015】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第2搬送部は、前記搬送ステージの前記搬送方向に垂直な方向の中央部に設けられることを特徴とする。
【0016】
また、本発明にかかる基板搬送装置は、上記の発明において、前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第3搬送部をさらに備え、前記第2搬送部は、前記第3搬送部と比して高い移動分解能を有することを特徴とする。
【0017】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第1搬送部は、外部から前記基板を受け入れる受入側搬送部と、前記受入側搬送部に対して前記搬送方向の下流側に設けられ、外部へ前記基板を払い出す払出側搬送部と有することを特徴とする。
【発明の効果】
【0018】
本発明によれば、搬送空間において基板を搬送する第1搬送部と、検査空間において基板を搬送し、第1搬送部と比して高い移動分解能を有する第2搬送部と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査等の処理の精度を維持しつつ、効率的な処理を行うことができるという効果を奏する。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明の実施の形態1にかかるフラットパネルディスプレイ(FPD)検査装置の構成を模式的に示す上面図である。
【図2】図2は、本発明の実施の形態にかかるFPD検査装置の構成を模式的に示す側面図である。
【図3】図3は、本発明の実施の形態1にかかるFPD検査装置が行う搬送処理を示すフローチャートである。
【図4】図4は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図5】図5は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図6】図6は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図7】図7は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図8】図8は、本発明の実施の形態1の変形例1にかかるFPD検査装置の構成を模式的に示す上面図である。
【図9】図9は、本発明の実施の形態1の変形例2にかかるFPD検査装置の構成を模式的に示す上面図である。
【図10】図10は、本発明の実施の形態2にかかるFPD検査装置の構成を模式的に示す上面図である。
【図11】図11は、本発明の実施の形態2にかかるFPD検査装置が行う搬送処理を示すフローチャートである。
【図12】図12は、本発明の実施の形態2にかかるFPD検査装置の搬送処理を説明するための図である。
【図13】図13は、本発明の実施の形態2にかかるFPD検査装置の搬送処理を説明するための図である。
【図14】図14は、本発明の実施の形態2にかかるFPD検査装置の搬送処理を説明するための図である。
【図15】図15は、本発明の実施の形態3にかかるFPD検査装置の構成を模式的に示す上面図である。
【図16】図16は、本発明の実施の形態3にかかるFPD検査装置が行う搬送処理を示すフローチャートである。
【図17】図17は、本発明の実施の形態3にかかるFPD検査装置の搬送処理を説明するための図である。
【図18】図18は、本発明の実施の形態3にかかるFPD検査装置の搬送処理を説明するための図である。
【図19】図19は、本発明の実施の形態3にかかるFPD検査装置の搬送処理を説明するための図である。
【発明を実施するための形態】
【0020】
以下、本発明を実施するための形態を図面と共に詳細に説明する。なお、以下の実施の形態により本発明が限定されるものではない。また、以下の説明において参照する各図は、本発明の内容を理解し得る程度に形状、大きさ、および位置関係を概略的に示してあるに過ぎない。すなわち、本発明は各図で例示された形状、大きさ、および位置関係のみに限定されるものではない。
【0021】
まず、本発明の実施の形態にかかる基板搬送装置について、図面を参照して詳細に説明する。なお、以下の説明では、基板搬送装置として基板の検査を行うフラットパネルディスプレイ(FPD)検査装置を例に挙げて説明する。FPD検査装置は、製造装置等に直結するインライン型であってもよいし、カセット等の基板ストッカーと直接搬入出するオフライン型であってもよい。
【0022】
(実施の形態1)
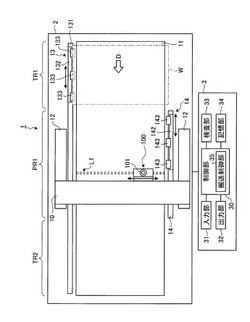
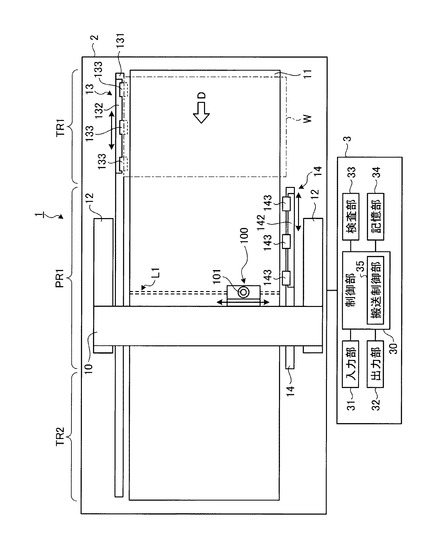
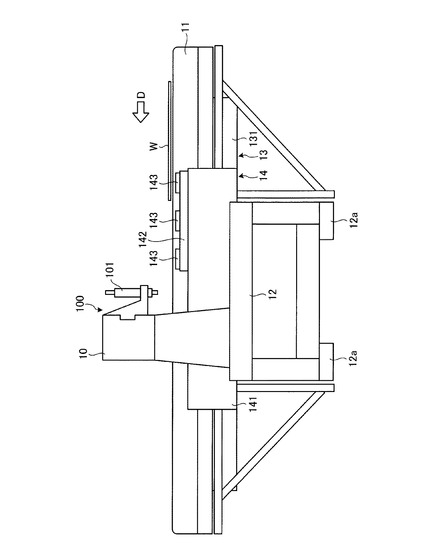
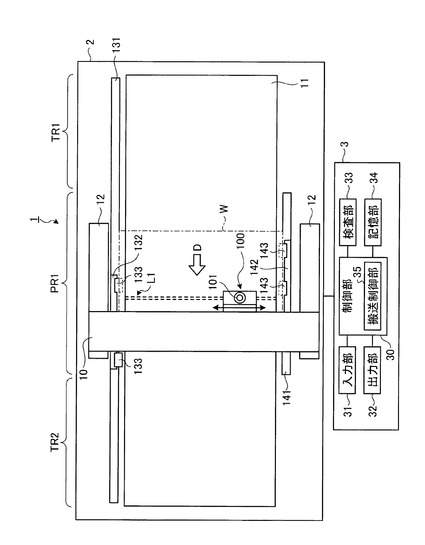
図1は、本実施の形態1にかかるFPD検査装置の概略構成を示す上面図である。図2は、本実施の形態1にかかるFPD検査装置の構成を模式的に示す側面図である。図1に示すように、FPD検査装置1は、搬送された矩形をなす基板Wの画像取得を行う基板処理部2と、基板処理部2全体の制御を行う制御機構3と、を備える。また、基板処理部2は、基板Wの画像を取得する処理手段としての光学ユニット100を保持するガントリステージ10と、基板Wを載置して搬送するステージ11と、を備える。
【0023】
ガントリステージ10およびステージ11は、たとえば図1,2に示すような架台12に固定される。架台12は、たとえばブロック状の大理石やスチール材を組み合わせたフレームなど、耐震性の高い部材によって構成される。加えて、架台12と設置面(たとえば床)との間には、たとえばスプリングや油圧ダンパなどで構成された振動吸収機構12aが設けられる。これにより、ガントリステージ10およびステージ11の振動がさらに防止される。
【0024】
光学ユニット100は、ステージ11が形成する搬送経路上に設定された、ステージ11の幅方向に平行な検査ラインL1を通過する基板Wを、顕微鏡101を介して撮像する図示しない撮像部を有する。この光学ユニット100によって取得された画像(高倍率画像)を解析することで、基板Wに欠陥が存在するか否かを検出することができる。また、図示しない照明部が基板Wに対して傾斜した光を基板Wに照射して、顕微鏡101がこの反射光を取得し、取得した反射光から得られる画像データをもとに、検査部33が基板W上に形成された膜の膜厚測定を行う。また、光学ユニット100は、検査ラインL1に沿って移動することが可能である。なお、上述した構成は、光学ユニット100と基板Wとを相対的に移動させる構成であれば他の構成であってもよい。例えば、基板Wをステージ11の上に固定し、光学ユニット100を基板Wの平面上を走査するように構成してもよい。なお、本説明では、光学ユニット100(ガントリステージ10)が設けられる領域を検査空間PR1という。また、検査空間PR1以外の領域を搬送空間TR1,TR2という。
【0025】
照明部は、光学ユニット100内から基板Wに向けて照明光を照明する落射照明光、または基板Wの光学ユニット100側と反対方向から基板Wに向けて照明光を照射する透過照明光を照射する。照明部は、光学ユニット100の外部、例えば、ステージ11の検査ラインL1に沿って照明光を照射可能に設けられる。この照明部は、光学ユニット100の移動に伴って移動するものであってもよいし、検査ラインL1に沿って延びる照明部材によって構成されるものであってもよい。
【0026】
また、光学ユニット100は、たとえば基板Wの欠陥部分に対して行うレーザ照射修復や塗布修正等の修復ユニット、観察・画像保存する撮像ユニット、配線等の寸法測定、膜厚測定、色測定などを行う測定ユニットなどの処理を所定の位置で施す他の処理ユニットに適宜置き替えることができる。すなわち、処理ユニットには、光学ユニット、修復ユニット、撮像ユニット、露光ユニット、測定ユニット等が含まれる。また、本実施の形態にかかるFPD検査装置1は、基板Wを載置するステージ上で、上述した処理ユニットが基板に対して各処理を行う構成も含んでもよい。
【0027】
ステージ11は、例えば基板Wの搬送方向Dに沿って延びる板状をなす。ステージ11には、図示しないエア供給部からのエアの供給によって鉛直上方に向けてエアを吹き出す複数の吹出穴が設けられる。この吹出穴から吹き出されるエアによって、ステージ11上に載置された基板Wはステージ11の上面から浮上して支持される。なお、光学ユニット100の光源がステージ11の下方にある場合、ステージは、光源からの光を透過できる透明部材からなることが好ましい。
【0028】
ここで、ステージ11に搬送された基板Wは、所定の位置に載置されるように位置決めされる。基板Wの位置決め方法としては、ステージ11上に搬入された基板Wを支持してステージ11に載置するリフトピン、およびステージ11に載置された基板Wを整列させる整列機構等を用いる方法が挙げられる。
【0029】
なお、ステージ11は、上面で基板Wを保持し、搬送方向Dに沿って回転可能な支持手段としてのフリーローラによって支持されるものであってもよい。
【0030】
また、ステージ11の搬送方向Dに平行な方向の外縁側には、搬送方向Dに駆動し、基板Wを吸着保持して搬送する第1基板搬送機構13および第2基板搬送機構14がそれぞれ設けられる。
【0031】
第1基板搬送機構13は、ステージ11の搬送方向Dに沿った外縁側に設けられ、搬送方向Dに平行な搬送軸131上を移動する第1搬送部132を有する。第1搬送部132は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド133を保持する。各吸着パッド133は、第1搬送部132の移動方向に垂直な方向に昇降可能(図1の紙面に垂直な方向に移動可能)である。また、搬送軸131は、ステージ11の搬送方向と平行に延び、検査空間PR1および搬送空間TR1,TR2を含む領域に配設されている。第1基板搬送機構13は、搬送軸131としてベルトが用いられることによって実現される。なお、第1基板搬送機構13は、ベルトのほか、ラックアンドピニオン、移動分解能の低いリニアモータとリニアモータガイドによる構成を用いても実現可能である。
【0032】
第2基板搬送機構14は、ステージ11の外縁側であって、ステージ11が設けられる外縁側と対向する外縁側に設けられ、搬送方向Dに平行な搬送軸141上を移動する第2搬送部142を有する。第2搬送部142は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド143を保持する。各吸着パッド143は、第2搬送部142の移動方向に垂直な方向に昇降可能(図1の紙面に垂直な方向に移動可能)である。また、搬送軸141は、ステージ11の搬送方向と平行に延び、検査空間PR1を含む領域に配設されている。第2基板搬送機構14は、第1基板搬送機構13と比して高い移動分解能を有する。例えば、搬送軸141としてリニアモータガイドを用いるとともに、第2搬送部142として第1搬送部132よりも高い移動分解能を有するリニアモータを用いることによって実現される。なお、第2基板搬送機構14は、第1基板搬送機構13と比して高い移動分解能を有する搬送機構であればよく、リニアモータおよびリニアモータガイドのほか、ボールねじを用いた構成など、直進移動可能なアクチュエータであれば公知の如何なる構成によっても実現可能である。
【0033】
第2搬送部142は、第1搬送部132と比して高い移動分解能および等速性能を有する。このため、第2搬送部142は、光学ユニット100の処理速度に対応した速度の搬送に適している。一方、第1搬送部132は、第2搬送部142より速く搬送するのに適している。ここで、移動分解能は、1パルス当たりの移動量で定義される。すなわち、移動分解能は、1パルス当たりの移動量を詳細に設定できるほど高い。等速性能は、速度の揺らぎが小さいほど高い。
【0034】
また、FPD検査装置1が、少なくとも基板処理部2を囲み、光学ユニット100の上方に設けられるクリーンな空気(以下、クリーンエアという)を送り込むFFUを有する外装を備えていれば、クリーンルームを形成することができるので好ましい。このクリーンルームは、基板の搬入口および搬出口ならびに下部のダクト以外、密閉された内部空間である。
【0035】
FFUは、例えば、パーティクルなどのダストが除去されたクリーンエアを送出する。この結果、特に光学ユニット100の移動領域を、ダストの少ないクリーンな状態とする。また、光学ユニット100近傍に集中して送出されたクリーンな空気は、クリーンルーム内でダウンフローを形成したのち、排気口から排気される。
【0036】
制御機構3は、制御部30、入力部31、出力部32、検査部33および記憶部34を備える。制御機構3は、ROM、RAM、通信機能等を備えたコンピュータで実現される。
【0037】
制御部30は、FPD検査装置1全体の制御を行う。また、制御部30は、第1基板搬送機構13および第2基板搬送機構14を制御して基板の搬送を制御する搬送制御部35を有する。搬送制御部35は、搬送機構(第1,2基板搬送機構)から適宜座標を取得して、搬送機構による基板搬送の制御を行う。
【0038】
入力部31は、キーボード、マウス、タッチパネル、ボタン等を用いて構成され、検体の分析に必要な諸情報や分析動作の指示情報等を外部から入力する。出力部32は、ディスプレイ等を用いて構成される。
【0039】
検査部33は、光学ユニット100によって取得された画像またはそのスペクトルをもとに基板Wの測定および/または検査を行う。
【0040】
記憶部34は、情報を磁気的に記憶するハードディスクと、FPD検査装置1が処理を実行する際にその処理にかかわる、本実施の形態にかかる検査プログラムを含む各種プログラムをハードディスクからロードして電気的に記憶するメモリとを用いて構成される。
【0041】
上述したFPD検査装置1では、外部からステージ11に搬入された基板Wに対して、制御部30の制御のもと、基板Wの載置位置の調整を行なった後、第1基板搬送機構13によって外部から受け入れた基板Wを吸着保持して搬送方向Dに搬送し、第2基板搬送機構14によって搬送方向Dに搬送される基板Wに対して光学ユニット100が基板Wの欠陥検査等を行う。
【0042】
図3は、本実施の形態にかかるFPD検査装置1が行う搬送処理を示すフローチャートである。まず、搬送制御部35は、第1搬送部132を基板受入位置に移動させる(ステップS102)。ここで、基板受入位置は、外部からの基板Wを受け入れるための位置であって、例えば、搬送軸131における搬送空間TR1の検査空間PR1側と異なる側の端部側に設けられる。
【0043】
第1搬送部132を基板受入位置に移動させると、搬送制御部35は、第1搬送部132の吸着パッド133を駆動して基板Wの受け入れを行う(ステップS104)。第1搬送部132は、吸着パッド133によって基板Wを吸着保持する(ステップS106)。
【0044】
吸着パッド133によって基板Wが保持されると、図4に示すように、搬送制御部35は、第1搬送部132を駆動して基板Wを第1基板受渡位置に移動させる(ステップS108)。ここで、第1基板受渡位置は、第2搬送部142が、搬送空間TR1において基板Wを搬送した第1搬送部132から基板Wの受渡しを行うための位置であって、例えば、搬送軸131における検査空間PR1の搬送空間TR1側の端部側に設けられる。このとき、第1搬送部132は、搬送方向Dに対する後方側の端部が検査空間PR1と搬送空間TR1との境界に位置する。
【0045】
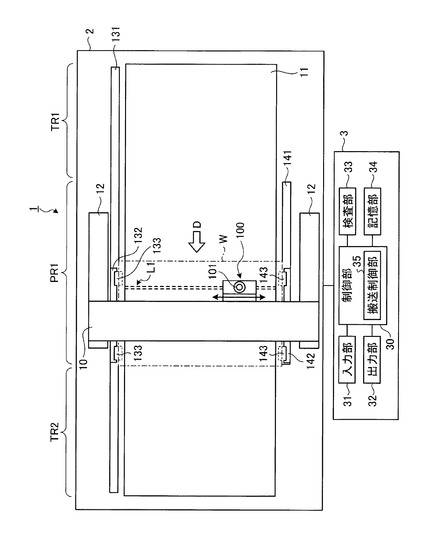
第1搬送部132が第1基板受渡位置に移動すると、搬送制御部35は、第1搬送部132(吸着パッド133)が保持する基板Wを第2搬送部142(吸着パッド143)に受け渡す処理を行う(ステップS110)。ここで、基板Wの受渡し処理では、第2搬送部142が吸着パッド143によって基板Wを吸着保持した後、第1搬送部132の吸着パッド133の吸着保持を解除することによって第1搬送部132から第2搬送部142に基板Wが受け渡される。
【0046】
第2搬送部142によって基板Wが保持されると、搬送制御部35は、図5に示すように、第2搬送部142を駆動して基板Wを移動させる。この移動に伴って制御部30は、光学ユニット100を駆動して、基板Wの画像取得を行う。制御部30は、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS112)。
【0047】
このとき、第1搬送部132は、搬送制御部35の制御のもと、搬送軸131上を移動して、第2基板受渡位置に配置される。ここで、第2基板受渡位置は、第1搬送部132が検査空間PR1において基板Wを搬送した第2搬送部142から基板Wの受渡しを行うための位置であって、例えば、搬送軸131における検査空間PR1の搬送空間TR2側の端部側に設けられる。このとき、第1搬送部132は、搬送方向Dに対する前方側の端部が検査空間PR1と搬送空間TR2との境界に位置する。なお、第1搬送部132が基板Wの下部を通過する際、搬送制御部35が、吸着パッド133の吸着面が基板Wと接触しないよう吸着パッド133を下降させることが好ましい。
【0048】
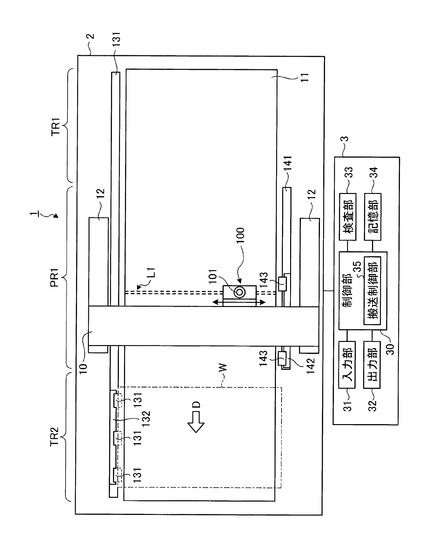
第2搬送部142の移動に伴う基板検査処理が終了すると、第2搬送部142は、第2基板受渡位置に位置する。ここで、図6に示すように、待機している第1搬送部132に再び基板を受け渡す基板受渡し処理を行う(ステップS114)。この基板受渡し処理では、第1搬送部132が吸着パッド133によって基板Wを吸着保持した後、第2搬送部142の吸着パッド143の吸着保持を解除することによって第2搬送部142から第1搬送部132に基板Wが受け渡される。
【0049】
ステップS114において、第1搬送部132が検査空間PR1を通過した基板を保持すると、搬送制御部35は、図7に示すように、第1搬送部132を基板払出位置に移動させる(ステップS116)。ここで、基板払出位置は、光学ユニット100による撮像処理の終了した基板Wを外部への払い出すための位置であって、例えば、搬送軸131における搬送空間TR2の検査空間PR1側と異なる側の端部に設けられる。
【0050】
基板Wを保持した第1搬送部132が基板払出位置に到達すると、外部の搬送機構によって、基板Wが外部に搬送される(ステップS118)。基板Wの払出し後、次の検査対象基板がある場合(ステップS120:Yes)、制御部30は、ステップS102に移行して、次の基板に対して上述した処理を繰り返す。また、次の検査対象基板がない場合(ステップS120:No)、制御部30は、基板の搬送処理を終了する。
【0051】
上述した本実施の形態1によれば、搬送空間において基板を搬送する第1搬送部と、検査空間において基板を搬送し、第1搬送部と比して高い移動分解能を有する第2搬送部と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査精度を維持しつつ、効率的な処理を行うことを可能とする。
【0052】
また、本実施の形態1では、高価なリニアモータおよびリニアモータガイドは、検査空間にかかる領域のみで使用し、搬送空間においては、安価なベルト等の構成で基板を搬送するようにしたので、安価に製造し、かかるFPD検査装置の製造コストを抑制することができる。
【0053】
なお、上述した実施の形態1において、順次送られる基板のうち、画像を取得する必要のない基板がある場合は、第1搬送部132が搬送空間TR1から搬送空間TR2まで基板Wを搬送する。この場合においても、比較的高速で移動する第1搬送部132が基板受入位置から基板払出位置まで基板Wを搬送するため、効率的に基板の搬送処理を行うことができる。
【0054】
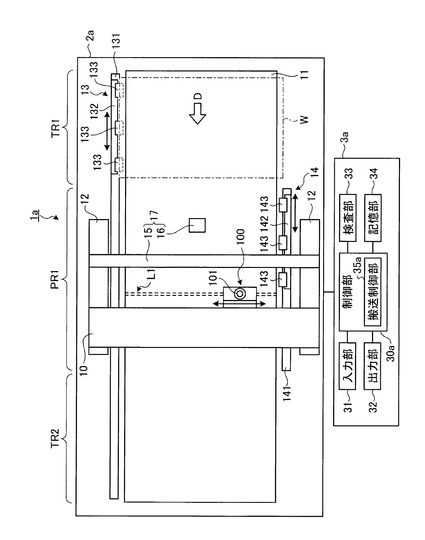
図8は、本実施の形態1の変形例1にかかるFPD検査装置1aの構成を模式的に示す上面図である。変形例1にかかる基板処理部2aは、基板Wの高倍率画像を取得する高倍画像取得部としての光学ユニット100を保持するガントリステージ10のほか、照明部材15およびラインセンサカメラ16を有し、基板Wの全体画像を取得する全体画像取得部17を備える。また、制御機構3aは、上述した入力部31、出力部32および記憶部34のほか、全体画像取得部17を含むFPD検査装置1aの制御を行う制御部30aと、基板Wの搬送処理の制御を行なう搬送制御部35aと、光学ユニット100および全体画像取得部17から取得した画像の測定および/または検査を行う検査部33aと、を備える。
【0055】
全体画像取得部17は、搬送方向Dと直交する方向であるステージ11の幅方向に延び、基板Wを照明する線状光源を有する照明部材15と、照明部材15からの照明光の反射光を取り込んで、基板Wの全体画像を取得するラインセンサカメラ16とを有する。ラインセンサカメラ16は、基板Wが反射した照明部材15からの反射光を取り込める位置に配設される。
【0056】
なお、ラインセンサカメラ16は、照明部材15が照射する照射光に対して、正反射光を取得するものであってよいし、散乱光を取得するものであってもよい。取得する光に応じてラインセンサカメラの位置、角度は適宜変更可能である。
【0057】
上述した変形例1にかかるFPD検査装置1aでは、外部からステージ11に搬入された基板Wに対して、制御部30aの制御のもと、基板Wの載置位置の調整を行なった後、吸着パッド133によって基板Wを吸着保持して搬送方向Dに搬送して、全体画像取得部17で全体画像を取得し、光学ユニット100によって基板Wの欠陥検査等を行う。このとき、第1搬送部132は、搬送制御部35aの制御のもと、基板Wを、全体画像取得部17を通過させた後に、再度ステージ11の搬入位置まで戻って第2搬送部14に基板を受渡し、第2搬送部14が基板Wを搬送方向Dに移動させて光学ユニット100による欠陥検査を行う。なお、全体画像取得部17から光学ユニット100までの距離が、基板Wに対して十分長い場合は、全体画像取得部17による全体画像の取得後、基板Wを戻さずに光学ユニット100による欠陥検査を行うことができる。
【0058】
また、全体画像取得部17の画像取得において、第1搬送部132の移動速度および移動分解能であっても画像が取得できる場合、第1搬送部132は、第2搬送部142へ基板Wの受渡しを行わずに、基板Wを搬送してもよい。このとき、第1搬送部132により一定の速度で基板Wを搬送空間TR1から搬送空間TR2にかけて移動させるとともに、全体画像取得部17による画像取得が行われる。
【0059】
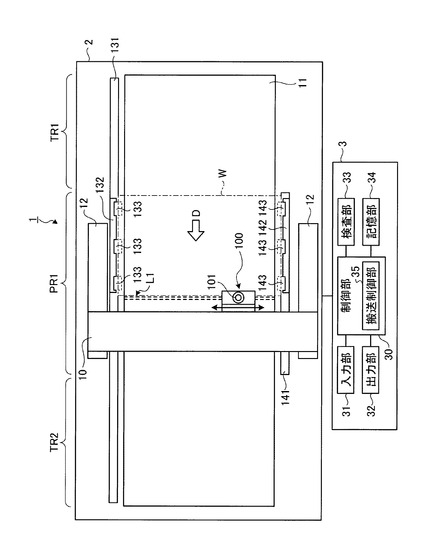
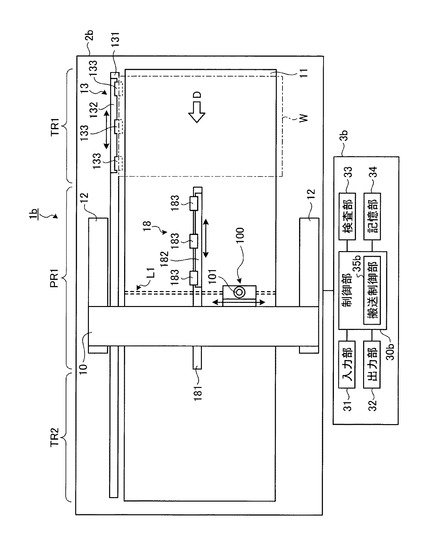
図9は、本実施の形態1の変形例2にかかるFPD検査装置1bの構成を模式的に示す上面図である。変形例2にかかる基板処理部2bは、上述した第1基板搬送機構13のほか、ステージ11の幅方向(搬送方向Dに垂直な方向)の中央部に設けられ、検査空間PR1において基板Wの搬送を行う第2基板搬送機構18を備える。また、制御機構3bは、上述した入力部31、出力部32、検査部33および記憶部34のほか、第2搬送機構18を含むFPD検査装置1bの制御を行う制御部30bと、基板Wの搬送処理の制御を行なう搬送制御部35bと、を備える。
【0060】
第2基板搬送機構18は、搬送方向Dに平行な搬送軸181上を移動する第2搬送部182を有する。第2搬送部182は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド183を保持する。各吸着パッド183は、第2搬送部182の移動方向に垂直な方向に昇降可能(図9の紙面に垂直な方向に移動可能)である。また、搬送軸181は、ステージ11の搬送方向と平行に延び、検査空間PR1を含む領域に配設されている。第2基板搬送機構18は、搬送軸181としてリニアモータガイドを用いるとともに、第2搬送部182としてリニアモータを用いることによって実現される。なお、第2基板搬送機構18は、リニアモータおよびリニアモータガイドのほか、ボールねじを用いた構成によっても実現可能である。なお、第2搬送部182は、上述した第2搬送部142と同一の移動分解能および等速性能で基板を搬送する。
【0061】
変形例2にかかるFPD検査装置1bによれば、第2基板搬送機構18がステージ11の幅方向の中央に設けられることによって、ステージ11に搬入された基板Wの重心位置を含む領域を保持することが可能となり、安定した基板搬送を行うことができる。また、上述した実施の形態1と異なり、ステージ11の搬送方向Dと平行な側の端部に第2搬送機構が配設されないため、ステージの幅方向(搬送方向Dに垂直な方向)で省スペース化することができる。
【0062】
(実施の形態2)
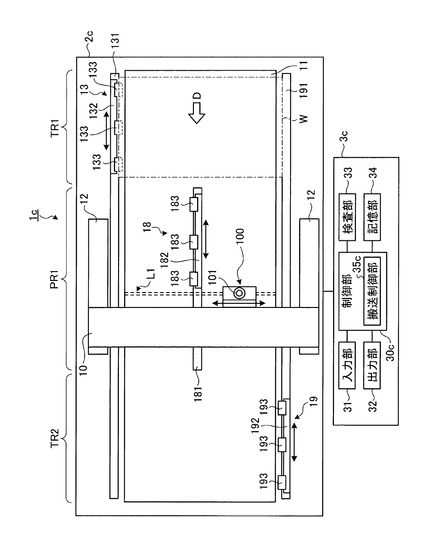
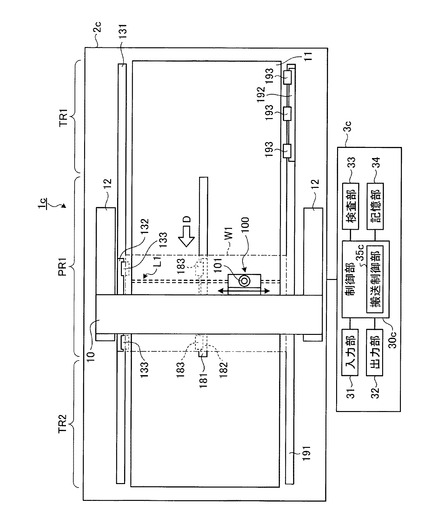
図10は、本実施の形態2にかかるFPD検査装置の概略構成を示す上面図である。図10に示すように、FPD検査装置1cは、搬送された矩形をなす基板Wの画像取得を行う基板処理部2cと、基板処理部2c全体の制御を行う制御機構3cと、を備える。本実施の形態2にかかる基板処理部2cは、上述した第1基板搬送機構13および第2基板搬送機構18のほか、ステージ11の外縁側であって、ステージ11が設けられる外縁側と対向する外縁側に設けられ、搬送方向Dに沿って基板Wを搬送する第3基板搬送機構19を備える。また、制御機構3cは、上述した入力部31、出力部32、検査部33および記憶部34のほか、第3基板搬送機構19を含む基板処理部2cの制御を行う制御部30cと、基板Wの搬送処理の制御を行なう搬送制御部35cと、を備える。
【0063】
第3基板搬送機構19は、搬送方向Dに平行な搬送軸191上を移動する第3搬送部192を有する。第3搬送部192は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド193を保持する。各吸着パッド193は、第3搬送部192の移動方向に垂直な方向に昇降可能(図10の紙面に垂直な方向に移動可能)である。また、搬送軸191は、ステージ11の搬送方向と平行に延び、検査空間PR1および搬送空間TR1,TR2を含む領域に配設されている。第3基板搬送機構19は、搬送軸191としてベルトが用いられることによって実現される。なお、第3基板搬送機構19は、ベルトのほか、ラックアンドピニオンを用いても実現可能である。
【0064】
ここで、第3搬送部192は、第1搬送部132と同様に、第2搬送部182と比して高い速度で基板Wの搬送を行う。このとき、第3搬送部192は、第1搬送部132と同じ速度で基板Wを搬送することが好ましい。
【0065】
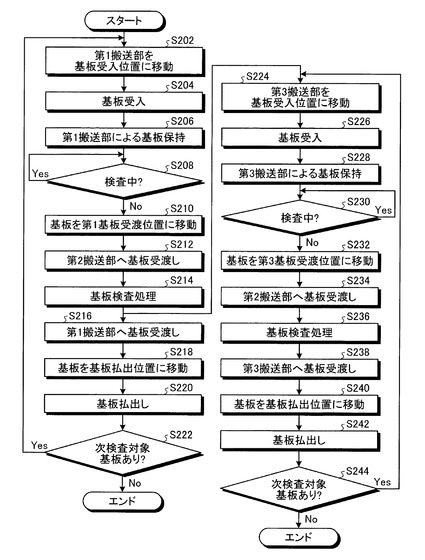
図11は、本実施の形態にかかるFPD検査装置1cが行う搬送処理を示すフローチャートである。まず、搬送制御部35cは、第1搬送部132を基板受入れ位置に移動させる(ステップS202)。第1搬送部132を基板受入位置に移動させると、搬送制御部35cは、第1搬送部132の吸着パッド133を駆動して基板W1の受け入れを行う(ステップS204)。第1搬送部132は、吸着パッド133によって基板W1を吸着保持する(ステップS206)。
【0066】
第1搬送部132によって基板W1が保持されると、搬送制御部35cは、光学ユニット100による撮像処理等が行われている状態(検査中の状態)であるか否かを判断する(ステップS208)。ここで、搬送制御部35cは、検査中であると判断した場合(ステップS208:Yes)、再度検査中であるか否かの判断を行い、検査中の状態が解除されるまで判断処理を繰り返す。
【0067】
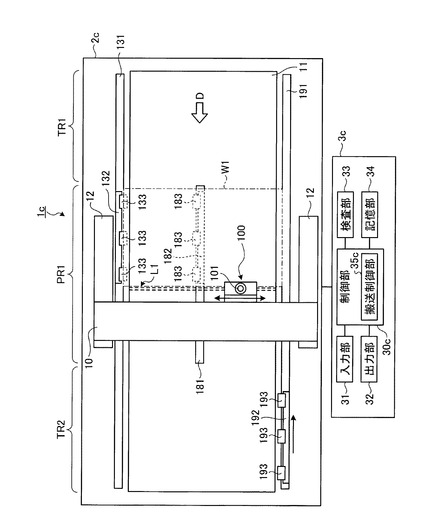
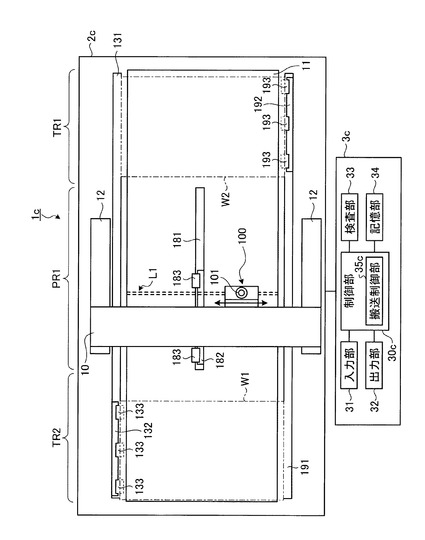
また、搬送制御部35cは、検査中でないと判断した場合(ステップS208:No)、第1搬送部132を駆動して基板W1を第1基板受渡位置に移動させる(ステップS210)。第1搬送部132が第1基板受渡位置に移動すると、搬送制御部35cは、図12に示すように、第1搬送部132が保持する基板W1を第2搬送部182に受け渡す処理を行う(ステップS212)。ここで、基板W1の受渡し処理では、第2搬送部182が吸着パッド183によって基板W1を吸着保持した後、第1搬送部132の吸着パッド133の吸着保持を解除することによって第1搬送部132から第2搬送部182に基板W1が受け渡される。
【0068】
第2搬送部182によって基板W1が保持されると、搬送制御部35cは、第2搬送部182を駆動して基板W1を移動させる。この移動に伴って制御部30cは、光学ユニット100を駆動して、基板W1の画像取得を行う。制御部30cは、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS214)。
【0069】
このとき、第1搬送部132は、搬送制御部35cの制御のもと、搬送軸131上を移動して、第2基板受渡位置に配置される。第2搬送部182の移動に伴う基板検査処理が終了すると、第2搬送部182は、第2基板受渡位置に移動する。ここで、第2搬送部182は、図13に示すように、待機している第1搬送部132に再び基板を受け渡す基板受渡し処理を行う(ステップS216)。この基板受渡し処理では、第1搬送部132が吸着パッド133によって基板W1を吸着保持した後、第2搬送部182の吸着パッド183の吸着保持を解除することによって第2搬送部182から第1搬送部132に基板W1が受け渡される。
【0070】
ステップS216において、第1搬送部132が検査空間PR1を通過した基板を保持すると、搬送制御部35cは、図14に示すように、第1搬送部132を基板払出位置に移動させる(ステップS218)。基板W1を保持した第1搬送部132が基板払出位置に到達すると、外部の搬送機構によって、基板W1が外部に搬送される(ステップS220)。
【0071】
基板W1の払出し後、次に第1基板搬送機構13が搬送処理を行う検査対象基板がある場合(ステップS222:Yes)、制御部30cは、ステップS202に移行して、次の基板に対して上述した処理を繰り返す。また、次に第1基板搬送機構13が搬送処理を行う検査対象基板がない場合(ステップS222:No)、制御部30cは、基板の搬送処理を終了する。
【0072】
一方、ステップS216において、基板W1の基板検査処理中、搬送制御部35cは、第3搬送部192を基板受入れ位置に移動させる(ステップS224)。ここで、基板受入位置は、外部からの基板W2を受け入れるための位置であって、例えば、搬送軸191における搬送空間TR1の検査空間PR1側と異なる側の端部側(ステージを介して対向する位置)に設けられる。
【0073】
第3搬送部192を受入位置に移動させると、搬送制御部35cは、図14に示すように、第3搬送部192の吸着パッド193を駆動して基板W2の受け入れを行う(ステップS226)。第3搬送部192は、吸着パッド193によって基板W2を吸着保持する(ステップS228)。
【0074】
第3搬送部192によって基板W2が保持されると、搬送制御部35cは、光学ユニット100による撮像処理等が行われている状態(検査中の状態)であるか否かを判断する(ステップS230)。ここで、搬送制御部35cは、検査中であると判断した場合(ステップS230:Yes)、再度検査中であるか否かの判断を行い、検査中の状態が解除されるまで判断処理を繰り返す。
【0075】
また、搬送制御部35cは、検査中でないと判断した場合(ステップS230:No)、第3搬送部192を駆動して基板W2を第3基板受渡位置に移動させる(ステップS232)。ここで、第3基板受渡位置は、第2搬送部182が搬送空間TR1において基板W2を搬送した第3搬送部192から基板W2の受渡しを行うための位置であって、例えば、搬送軸191における検査空間PR1の搬送空間TR1側の端部側に設けられる。このとき、第3搬送部192は、搬送方向Dに対する後方側の端部が検査空間PR1と搬送空間TR1との境界に位置する。
【0076】
第3搬送部192が第3基板受渡位置に移動すると、搬送制御部35cは、第3搬送部192が保持する基板W2を第2搬送部182に受け渡す処理を行う(ステップS234)。ここで、基板W2の受渡し処理では、第2搬送部182が吸着パッド183によって基板W2を吸着保持した後、第3搬送部192の吸着パッド193の吸着保持を解除することによって第3搬送部192から第2搬送部182に基板W2が受け渡される。
【0077】
第2搬送部182によって基板W2が保持されると、搬送制御部35cは、第2搬送部182を駆動して基板W2を移動させる。この移動に伴って制御部30cは、光学ユニット100を駆動して、基板W2の画像取得を行う。制御部30cは、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS236)。
【0078】
このとき、第3搬送部192は、搬送制御部35cの制御のもと、搬送軸191上を移動して、第4基板受渡位置に配置される。ここで、第4基板受渡位置は、第3搬送部192が検査空間PR1において基板W2を搬送した第2搬送部182から基板W2の受渡しを行うための位置であって、例えば、搬送軸191における検査空間PR1の搬送空間TR2側の端部側に設けられる。このとき、第3搬送部192は、搬送方向Dに対する前方側の端部が検査空間PR1と搬送空間TR2との境界に位置する。
【0079】
第2搬送部182の移動に伴う基板検査処理が終了すると、第2搬送部182は、第2基板受渡位置に移動する。ここで、第2搬送部182は、待機している第3搬送部192に再び基板W2を受け渡す基板受渡し処理を行う(ステップS238)。この基板受渡し処理では、第3搬送部192が吸着パッド193によって基板W2を吸着保持した後、第2搬送部182の吸着パッド183の吸着保持を解除することによって第2搬送部182から第3搬送部192に基板W2が受け渡される。
【0080】
ステップS238において、第3搬送部192が検査空間PR1を通過した基板W2を保持すると、搬送制御部35cは、第3搬送部192を基板払出位置に移動させる(ステップS240)。ここで、基板払出位置は、光学ユニット100による撮像処理の終了した基板W2を外部への払い出すための位置であって、例えば、搬送軸191における搬送空間TR2の検査空間PR1側と異なる側の端部に設けられる。
【0081】
基板W2を保持した第3搬送部192が基板払出位置に到達すると、外部の搬送機構によって、基板W2が外部に搬送される(ステップS242)。基板W2の払出し後、次に第3基板搬送機構19が搬送処理を行う検査対象基板がある場合(ステップS244:Yes)、制御部30cは、ステップS224に移行して、次の基板に対して上述した処理を繰り返す。また、次に第3基板搬送機構19が搬送処理を行う検査対象基板がない場合(ステップS244:No)、制御部30cは、基板の搬送処理を終了する。
【0082】
上述した本実施の形態2によれば、上述した実施の形態1と同様、搬送空間において基板を搬送する第1,3搬送部と、検査空間において基板を搬送し、第1,3搬送部と比して高い移動分解能を有する第2搬送部と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査精度を維持しつつ、効率的な処理を行うことを可能とする。
【0083】
また、上述した実施の形態2では、ステージ上に1または複数の基板が順次載置され、この基板を2つの搬送機構(第1,3基板搬送機構)で連続的に搬送して検査を行うため、処理の効率を一段と向上させることが可能となる。
【0084】
なお、検査空間PR1の搬送方向Dの長さが、検査対象の基板に対して十分な長さ、具体的には、基板2枚以上の長さである場合、第2搬送部を搬送方向に対して垂直な方向に2つ設け、より搬送ピッチを狭めて搬送処理を行ってもよい。2つの第2搬送部は、順次搬送される基板に対して交互に搬送する。これにより、ステージ11上に3以上の基板を載置して処理することができ、一段と効率的に処理して、処理時間を短縮することが可能となる。
【0085】
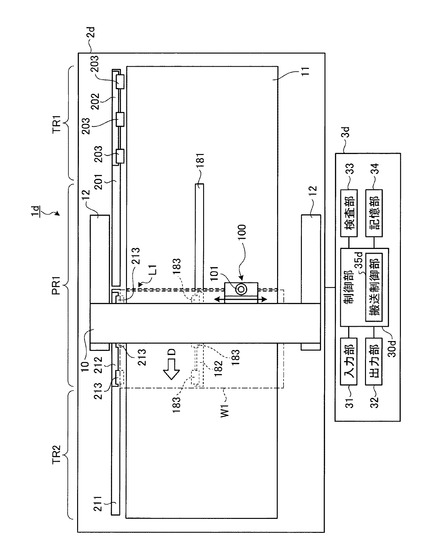
(実施の形態3)
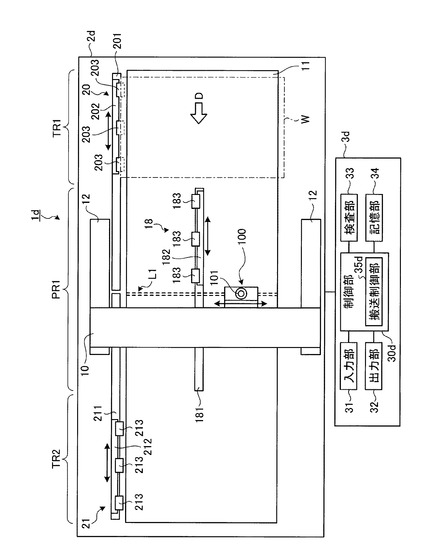
図15は、本実施の形態3にかかるFPD検査装置の概略構成を示す上面図である。図15に示すように、FPD検査装置1dは、搬送された矩形をなす基板Wの画像取得を行う基板処理部2dと、基板処理部2d全体の制御を行う制御機構3dと、を備える。本実施の形態3にかかる基板処理部2dは、上述した第2基板搬送機構18のほか、ステージ11において搬送方向Dに平行な一つの辺に隣接してそれぞれ設けられ、搬送方向Dに沿って基板を搬送する受入側基板搬送機構20および払出側基板搬送機構21を備える。また、制御機構3dは、上述した入力部31、出力部32、検査部33および記憶部34のほか、受入側基板搬送機構20および払出側基板搬送機構21を含む基板処理部2dの制御を行う制御部30dと、基板の搬送処理の制御を行なう搬送制御部35dと、を備える。
【0086】
受入側基板搬送機構20は、ステージ11の搬送方向Dに沿った外縁側に設けられ、搬送方向Dに平行な搬送軸201上を移動する受入側搬送部202(第1搬送部)を有する。受入側搬送部202は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド203を保持する。各吸着パッド203は、受入側搬送部202の移動方向に垂直な方向に昇降可能(図15の紙面に垂直な方向に移動可能)である。また、搬送軸201は、ステージ11の搬送方向と平行に延び、搬送空間TR1と検査空間PR1の一部とを含む領域に配設されている。受入側基板搬送機構20は、搬送軸201としてベルトが用いられることによって実現される。なお、受入側基板搬送機構20は、ベルトのほか、ラックアンドピニオンを用いても実現可能である。
【0087】
払出側基板搬送機構21は、受入側基板搬送機構20に対して搬送方向Dの下流側に設けられ、搬送方向Dに平行な搬送軸211上を移動する払出側搬送部212(第1搬送部)を有する。払出側搬送部212は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド213を保持する。各吸着パッド213は、払出側搬送部212の移動方向に垂直な方向に昇降可能(図15の紙面に垂直な方向に移動可能)である。また、搬送軸211は、ステージ11の搬送方向と平行に延び、搬送空間TR2と検査空間PR1の一部とを含む領域に配設されている。払出側基板搬送機構21は、搬送軸211としてベルトが用いられることによって実現される。なお、払出側基板搬送機構21は、ベルトのほか、ラックアンドピニオンを用いても実現可能である。
【0088】
ここで、搬送軸201,211は、一直線状に配設される。また、受入側搬送部202および払出側搬送部212は、上述した第1搬送部132と同様に、第2搬送部182と比して速い速度で基板Wの搬送を行う。このとき、受入側搬送部202および払出側搬送部212は、同じ速度で基板を搬送することが好ましい。
【0089】
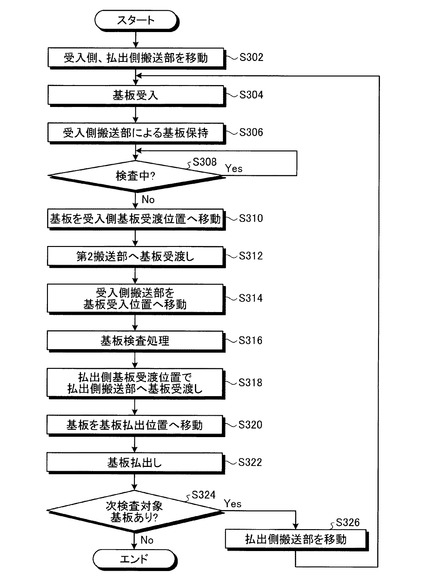
図16は、本実施の形態にかかるFPD検査装置1dが行う搬送処理を示すフローチャートである。まず、搬送制御部35dは、受入側搬送部202を基板受入位置に移動させるとともに、払出側搬送部212を払出側基板受渡位置に移動させる(ステップS302)。ここで、基板受入位置は、外部からの基板Wを受け入れるための位置であって、例えば、搬送軸201における検査空間PR1の搬送空間TR2側の端部に設けられる。また、払出側基板受渡位置は、払出側搬送部212が検査空間PR1において基板Wを搬送した第2搬送部182から基板Wの受渡しを行うための位置であって、例えば、搬送軸211における検査空間PR1の搬送空間TR2側の端部側に設けられる。このとき、払出側搬送部212は、搬送方向Dに対する前方側の端部が検査空間PR1と搬送空間TR2との境界に位置する。
【0090】
受入側搬送部202を基板受入位置に移動させると、搬送制御部35dは、受入側搬送部202を駆動して基板W1の受け入れを行う(ステップS304)。受入側搬送部202は、吸着パッド203によって基板W1を吸着保持する(ステップS306)。
【0091】
受入側搬送部202によって基板W1が保持されると、搬送制御部35dは、光学ユニット100による撮像処理等が行われている状態(検査中の状態)であるか否かを判断する(ステップS308)。ここで、搬送制御部35dは、検査中であると判断した場合(ステップS308:Yes)、再度検査中であるか否かの判断を行い、検査中の状態が解除されるまで判断処理を繰り返す。
【0092】
また、搬送制御部35dは、検査中でないと判断した場合(ステップS308:No)、受入側搬送部202を駆動して基板W1を受入側基板受渡位置に移動させる(ステップS310)。また、受入側基板受渡位置は、第2搬送部182が検査空間PR1において基板W1を搬送した受入側搬送部202から基板W1の受渡しを行うための位置であって、例えば、搬送軸201における検査空間PR1の搬送空間TR1側の端部に設けられる。このとき、受入側搬送部202は、搬送方向Dに対する後方側の端部が検査空間PR1と搬送空間TR1との境界に位置する。
【0093】
受入側搬送部202が受入側基板受渡位置に移動すると、搬送制御部35dは、図17に示すように、受入側搬送部202が保持する基板W1を第2搬送部182に受け渡す処理を行う(ステップS312)。ここで、基板W1の受渡し処理では、第2搬送部182が吸着パッド183によって基板W1を吸着保持した後、受入側搬送部202の吸着パッド203の吸着保持を解除することによって受入側搬送部202から第2搬送部182に基板W1が受け渡される。
【0094】
第2搬送部182によって基板W1が保持されると、搬送制御部3dは、受入側搬送部202を基板受入位置へ移動させると同時に、第2搬送部182を駆動して基板W1を移動させる(ステップS314)。この移動に伴って制御部30dは、光学ユニット100を駆動して、基板W1の画像取得を行う。制御部30dは、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS316)。
【0095】
第2搬送部182の移動に伴う基板検査処理が終了すると、第2搬送部182は、ステージ11上において搬送方向Dに垂直な方向が払出側基板受渡位置に対応する位置に移動している。ここで、第2搬送部182は、図18に示すように、待機している払出側搬送部212に基板W1を受け渡す基板受渡し処理を行う(ステップS318)。この基板受渡し処理では、払出側搬送部212が吸着パッド213によって基板W1を吸着保持した後、第2搬送部182の吸着パッド183の吸着保持を解除することによって第2搬送部182から払出側搬送部212に基板W1が受け渡される。
【0096】
ステップS318において、払出側搬送部212が検査空間PR1を通過した基板W1を保持すると、搬送制御部35dは、図19に示すように、払出側搬送部212を基板払出位置に移動させる(ステップS320)。ここで、基板払出位置は、光学ユニット100による撮像処理の終了した基板W1を外部への払い出すための位置であって、例えば、搬送軸211における搬送空間TR2の検査空間PR1側と異なる側の端部に設けられる。
【0097】
基板W1を保持した払出側搬送部212が基板払出位置に到達すると、外部の搬送機構によって、基板W1が外部に搬送される(ステップS322)。
【0098】
基板W1の払出し後、次に搬送処理を行う検査対象基板がある場合(ステップS324:Yes)、搬送制御部35dは、払出側搬送部212を払出側基板受渡位置に移動させ(ステップS326)、ステップS304に移行して、次の基板に対して上述した処理を繰り返す。また、次に搬送処理を行う検査対象基板がない場合(ステップS324:No)、搬送制御部35dは、基板の搬送処理を終了する。
【0099】
上述した本実施の形態3によれば、上述した実施の形態1と同様、搬送空間において基板を搬送する第1基板搬送機構と、検査空間において基板を搬送し、第1基板搬送機構と比して高い移動分解能を有する第2基板搬送機構と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査精度を維持しつつ、効率的な処理を行うことを可能とする。
【0100】
また、上述した実施の形態3では、ステージ上に1または複数の基板が順次載置され、この基板を2つの搬送機構(受入側、払出側基板搬送機構)で連続的に搬送して検査を行うため、処理の効率を一段と向上させることが可能となる。
【0101】
なお、本実施の形態3において、検査空間PR1における基板の搬送を、ステージ11の幅方向の中央に設けられる第2基板搬送機構18であるものとして説明したが、上述した実施の形態1のような、ステージ11の搬送方向Dに沿った外縁側に設けられる第2基板搬送機構14を適用することも可能である。
【0102】
以上のように、本発明にかかる基板搬送装置は、検査精度を維持しつつ、効率的な処理を行うことに有用である。
【符号の説明】
【0103】
1,1a,1b,1c,1d FPD検査装置
2,2a,2b,2c,2d 基板処理部
3,3a,3b,3c,3d 制御機構
10 ガントリステージ
11 ステージ
12 架台
12a 振動吸収機構
13 第1基板搬送機構
14,18 第2基板搬送機構
15 照明部材
16 ラインセンサカメラ
17 全体画像取得部
19 第3基板搬送機構
20 受入側基板搬送機構
21 払出側基板搬送機構
31 入力部
32 出力部
33,33a 検査部
34 記憶部
100 光学ユニット
101 顕微鏡
131,141,181,191,201,211 搬送軸
132 第1搬送部
142,182 第2搬送部
133,143,183,193,203,213 吸着パッド
192 第3搬送部
202 受入側搬送部
212 払出側搬送部
L1 検査ライン
PR1 検査空間
TR1,TR2 搬送空間
W,W1,W2 基板
【技術分野】
【0001】
本発明は、例えば、フラットパネルディスプレイ(FPD)用のガラス基板や各種半導体基板やプリント基板などを搬送して検査する基板搬送装置に関する。
【背景技術】
【0002】
近年、ガラス基板や各種半導体基板やプリント基板(以下、基板という)などの製造において、基板を搬送して検査等の処理を行う基板搬送装置がある。基板搬送装置は、撮像等によって基板の検査処理を行う検査処理部と、外部から検査処理部へ基板を搬送または検査処理部から外部へ基板を搬送する搬送ステージとを有する。
【0003】
検査処理部は、例えば、基板の表面や裏面に照明光を当て、カメラでその反射光や透過光を取り込んで検査対象領域の全体画像を取得する検査であるマクロ検査や、顕微鏡等を用いて基板上の所定箇所の配線パターン等の拡大画像をカメラで取得する検査であるミクロ検査を行う。マクロ検査は、例えば、ラインセンサカメラによって取得された基板の全体画像を用いて、基板上の欠陥、塗布膜のムラや、基板上の傷等の確認を行う。また、ミクロ検査の一種として、例えば、基板上に形成されたフォトレジスト等の膜厚や各種配線パターンの膜厚、液晶層からの透過光の着色を行うカラーフィルタ上に形成された各種部材の膜厚の測定が挙げられる。膜厚の測定は、一般的に、光源から基板に入力した光から発光スペクトルを取得して得られた屈折率等の薄膜情報を用いて行われる。
【0004】
搬送ステージは、基板を搬送する搬送面に複数の空気穴を有し、この空気穴から空気を吹き出すことによって基板を浮上させる浮上プレートと、基板を吸着保持する吸着パッドを有し、搬送方向に移動可能な搬送部とを備える。搬送部は、浮上プレートによって浮上した基板を、吸着パッドが吸着保持した状態で移動することで基板の搬送を行う。搬送部では、検査処理部の領域において、検査精度を維持するため、所定の等速性および移動分解能により高い精度の基板搬送が行われている。なお、基板の支持には、浮上プレートに代えて、搬送方向に沿って回転可能なフリーローラによって基板を支持する支持部材を用いる。
【0005】
ところで、上述した搬送ステージとして、読取対象物を載置する載置台と、載置台を移動自在に支持するスライド部材と、スライド部材を移動させる駆動モータと、駆動モータを制御して載置台を少なくとも2つの異なる速度で移動させることが可能な制御CPUと、を備えた読取装置が開示されている(例えば、特許文献1を参照)。
【0006】
また、液体を介して基板を露光するための露光光を射出する射出面を有する光学部材と、光学部材との間で液体を保持可能でかつ所定領域を移動可能な基板ステージと、光学部材との間で液体を保持する第1状態および保持しない第2状態とで移動速度が異なるように基板ステージの移動を制御する制御部と、を備えた露光装置が開示されている(例えば、特許文献2を参照)。
【0007】
上述した特許文献1,2に示す読取装置および露光装置では、載置台および基板ステージに載置される対象物に応じて、移動速度を変えて搬送することができる。これにより、読取処理や露光処理を効率的に行うことが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2006−47528号公報
【特許文献2】特開2009−182110号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
ところで、特許文献1が開示する読取装置にかかる搬送ステージを上述した基板搬送装置に適用した場合、基板搬送装置は、搬送による振動等の影響を考慮して、搬送経路全体として高精度の搬送を行う検査処理部に対応した一定の速度で基板を搬送する構成となる。しかしながら、搬送経路には、検査処理部に対応した速度よりも速い速度で基板を搬送可能な部分が含まれており、この搬送部分も一定の速度で基板を搬送すると、搬送における処理効率を低下させてしまうおそれがあった。また、特許文献2が開示する露光装置においても上述した基板搬送装置と同様に、搬送における処理効率を低下させてしまうおそれがあった。
【0010】
本発明は、上記に鑑みてなされたものであり、検査等の処理の精度を維持しつつ、効率的な処理を行うことができる基板搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した課題を解決し、目的を達成するために、本発明にかかる基板搬送装置は、搬送対象の基板に所定の処理を施す処理手段と、前記基板を載置して、該基板を搬送する搬送ステージとを有する基板搬送装置であって、前記搬送ステージの前記基板を搬送する搬送方向に沿った外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第1搬送部と、前記処理手段が前記基板に対して処理を施す処理領域で前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送し、前記第1搬送部と比して高い移動分解能を有する第2搬送部と、前記第1搬送部および前記第2搬送部における前記基板の搬送を制御する搬送制御部と、を備えたことを特徴とする。
【0012】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第2搬送部は、前記第1搬送部と比して高い等速性能を有することを特徴とする。
【0013】
また、本発明にかかる基板搬送装置は、上記の発明において、前記搬送制御部は、前記第1搬送部に前記第2搬送部と比して大きい速度で前記基板を搬送させることを特徴とする。
【0014】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第2搬送部は、前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられることを特徴とする。
【0015】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第2搬送部は、前記搬送ステージの前記搬送方向に垂直な方向の中央部に設けられることを特徴とする。
【0016】
また、本発明にかかる基板搬送装置は、上記の発明において、前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第3搬送部をさらに備え、前記第2搬送部は、前記第3搬送部と比して高い移動分解能を有することを特徴とする。
【0017】
また、本発明にかかる基板搬送装置は、上記の発明において、前記第1搬送部は、外部から前記基板を受け入れる受入側搬送部と、前記受入側搬送部に対して前記搬送方向の下流側に設けられ、外部へ前記基板を払い出す払出側搬送部と有することを特徴とする。
【発明の効果】
【0018】
本発明によれば、搬送空間において基板を搬送する第1搬送部と、検査空間において基板を搬送し、第1搬送部と比して高い移動分解能を有する第2搬送部と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査等の処理の精度を維持しつつ、効率的な処理を行うことができるという効果を奏する。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明の実施の形態1にかかるフラットパネルディスプレイ(FPD)検査装置の構成を模式的に示す上面図である。
【図2】図2は、本発明の実施の形態にかかるFPD検査装置の構成を模式的に示す側面図である。
【図3】図3は、本発明の実施の形態1にかかるFPD検査装置が行う搬送処理を示すフローチャートである。
【図4】図4は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図5】図5は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図6】図6は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図7】図7は、本発明の実施の形態1にかかるFPD検査装置の搬送処理を説明するための図である。
【図8】図8は、本発明の実施の形態1の変形例1にかかるFPD検査装置の構成を模式的に示す上面図である。
【図9】図9は、本発明の実施の形態1の変形例2にかかるFPD検査装置の構成を模式的に示す上面図である。
【図10】図10は、本発明の実施の形態2にかかるFPD検査装置の構成を模式的に示す上面図である。
【図11】図11は、本発明の実施の形態2にかかるFPD検査装置が行う搬送処理を示すフローチャートである。
【図12】図12は、本発明の実施の形態2にかかるFPD検査装置の搬送処理を説明するための図である。
【図13】図13は、本発明の実施の形態2にかかるFPD検査装置の搬送処理を説明するための図である。
【図14】図14は、本発明の実施の形態2にかかるFPD検査装置の搬送処理を説明するための図である。
【図15】図15は、本発明の実施の形態3にかかるFPD検査装置の構成を模式的に示す上面図である。
【図16】図16は、本発明の実施の形態3にかかるFPD検査装置が行う搬送処理を示すフローチャートである。
【図17】図17は、本発明の実施の形態3にかかるFPD検査装置の搬送処理を説明するための図である。
【図18】図18は、本発明の実施の形態3にかかるFPD検査装置の搬送処理を説明するための図である。
【図19】図19は、本発明の実施の形態3にかかるFPD検査装置の搬送処理を説明するための図である。
【発明を実施するための形態】
【0020】
以下、本発明を実施するための形態を図面と共に詳細に説明する。なお、以下の実施の形態により本発明が限定されるものではない。また、以下の説明において参照する各図は、本発明の内容を理解し得る程度に形状、大きさ、および位置関係を概略的に示してあるに過ぎない。すなわち、本発明は各図で例示された形状、大きさ、および位置関係のみに限定されるものではない。
【0021】
まず、本発明の実施の形態にかかる基板搬送装置について、図面を参照して詳細に説明する。なお、以下の説明では、基板搬送装置として基板の検査を行うフラットパネルディスプレイ(FPD)検査装置を例に挙げて説明する。FPD検査装置は、製造装置等に直結するインライン型であってもよいし、カセット等の基板ストッカーと直接搬入出するオフライン型であってもよい。
【0022】
(実施の形態1)
図1は、本実施の形態1にかかるFPD検査装置の概略構成を示す上面図である。図2は、本実施の形態1にかかるFPD検査装置の構成を模式的に示す側面図である。図1に示すように、FPD検査装置1は、搬送された矩形をなす基板Wの画像取得を行う基板処理部2と、基板処理部2全体の制御を行う制御機構3と、を備える。また、基板処理部2は、基板Wの画像を取得する処理手段としての光学ユニット100を保持するガントリステージ10と、基板Wを載置して搬送するステージ11と、を備える。
【0023】
ガントリステージ10およびステージ11は、たとえば図1,2に示すような架台12に固定される。架台12は、たとえばブロック状の大理石やスチール材を組み合わせたフレームなど、耐震性の高い部材によって構成される。加えて、架台12と設置面(たとえば床)との間には、たとえばスプリングや油圧ダンパなどで構成された振動吸収機構12aが設けられる。これにより、ガントリステージ10およびステージ11の振動がさらに防止される。
【0024】
光学ユニット100は、ステージ11が形成する搬送経路上に設定された、ステージ11の幅方向に平行な検査ラインL1を通過する基板Wを、顕微鏡101を介して撮像する図示しない撮像部を有する。この光学ユニット100によって取得された画像(高倍率画像)を解析することで、基板Wに欠陥が存在するか否かを検出することができる。また、図示しない照明部が基板Wに対して傾斜した光を基板Wに照射して、顕微鏡101がこの反射光を取得し、取得した反射光から得られる画像データをもとに、検査部33が基板W上に形成された膜の膜厚測定を行う。また、光学ユニット100は、検査ラインL1に沿って移動することが可能である。なお、上述した構成は、光学ユニット100と基板Wとを相対的に移動させる構成であれば他の構成であってもよい。例えば、基板Wをステージ11の上に固定し、光学ユニット100を基板Wの平面上を走査するように構成してもよい。なお、本説明では、光学ユニット100(ガントリステージ10)が設けられる領域を検査空間PR1という。また、検査空間PR1以外の領域を搬送空間TR1,TR2という。
【0025】
照明部は、光学ユニット100内から基板Wに向けて照明光を照明する落射照明光、または基板Wの光学ユニット100側と反対方向から基板Wに向けて照明光を照射する透過照明光を照射する。照明部は、光学ユニット100の外部、例えば、ステージ11の検査ラインL1に沿って照明光を照射可能に設けられる。この照明部は、光学ユニット100の移動に伴って移動するものであってもよいし、検査ラインL1に沿って延びる照明部材によって構成されるものであってもよい。
【0026】
また、光学ユニット100は、たとえば基板Wの欠陥部分に対して行うレーザ照射修復や塗布修正等の修復ユニット、観察・画像保存する撮像ユニット、配線等の寸法測定、膜厚測定、色測定などを行う測定ユニットなどの処理を所定の位置で施す他の処理ユニットに適宜置き替えることができる。すなわち、処理ユニットには、光学ユニット、修復ユニット、撮像ユニット、露光ユニット、測定ユニット等が含まれる。また、本実施の形態にかかるFPD検査装置1は、基板Wを載置するステージ上で、上述した処理ユニットが基板に対して各処理を行う構成も含んでもよい。
【0027】
ステージ11は、例えば基板Wの搬送方向Dに沿って延びる板状をなす。ステージ11には、図示しないエア供給部からのエアの供給によって鉛直上方に向けてエアを吹き出す複数の吹出穴が設けられる。この吹出穴から吹き出されるエアによって、ステージ11上に載置された基板Wはステージ11の上面から浮上して支持される。なお、光学ユニット100の光源がステージ11の下方にある場合、ステージは、光源からの光を透過できる透明部材からなることが好ましい。
【0028】
ここで、ステージ11に搬送された基板Wは、所定の位置に載置されるように位置決めされる。基板Wの位置決め方法としては、ステージ11上に搬入された基板Wを支持してステージ11に載置するリフトピン、およびステージ11に載置された基板Wを整列させる整列機構等を用いる方法が挙げられる。
【0029】
なお、ステージ11は、上面で基板Wを保持し、搬送方向Dに沿って回転可能な支持手段としてのフリーローラによって支持されるものであってもよい。
【0030】
また、ステージ11の搬送方向Dに平行な方向の外縁側には、搬送方向Dに駆動し、基板Wを吸着保持して搬送する第1基板搬送機構13および第2基板搬送機構14がそれぞれ設けられる。
【0031】
第1基板搬送機構13は、ステージ11の搬送方向Dに沿った外縁側に設けられ、搬送方向Dに平行な搬送軸131上を移動する第1搬送部132を有する。第1搬送部132は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド133を保持する。各吸着パッド133は、第1搬送部132の移動方向に垂直な方向に昇降可能(図1の紙面に垂直な方向に移動可能)である。また、搬送軸131は、ステージ11の搬送方向と平行に延び、検査空間PR1および搬送空間TR1,TR2を含む領域に配設されている。第1基板搬送機構13は、搬送軸131としてベルトが用いられることによって実現される。なお、第1基板搬送機構13は、ベルトのほか、ラックアンドピニオン、移動分解能の低いリニアモータとリニアモータガイドによる構成を用いても実現可能である。
【0032】
第2基板搬送機構14は、ステージ11の外縁側であって、ステージ11が設けられる外縁側と対向する外縁側に設けられ、搬送方向Dに平行な搬送軸141上を移動する第2搬送部142を有する。第2搬送部142は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド143を保持する。各吸着パッド143は、第2搬送部142の移動方向に垂直な方向に昇降可能(図1の紙面に垂直な方向に移動可能)である。また、搬送軸141は、ステージ11の搬送方向と平行に延び、検査空間PR1を含む領域に配設されている。第2基板搬送機構14は、第1基板搬送機構13と比して高い移動分解能を有する。例えば、搬送軸141としてリニアモータガイドを用いるとともに、第2搬送部142として第1搬送部132よりも高い移動分解能を有するリニアモータを用いることによって実現される。なお、第2基板搬送機構14は、第1基板搬送機構13と比して高い移動分解能を有する搬送機構であればよく、リニアモータおよびリニアモータガイドのほか、ボールねじを用いた構成など、直進移動可能なアクチュエータであれば公知の如何なる構成によっても実現可能である。
【0033】
第2搬送部142は、第1搬送部132と比して高い移動分解能および等速性能を有する。このため、第2搬送部142は、光学ユニット100の処理速度に対応した速度の搬送に適している。一方、第1搬送部132は、第2搬送部142より速く搬送するのに適している。ここで、移動分解能は、1パルス当たりの移動量で定義される。すなわち、移動分解能は、1パルス当たりの移動量を詳細に設定できるほど高い。等速性能は、速度の揺らぎが小さいほど高い。
【0034】
また、FPD検査装置1が、少なくとも基板処理部2を囲み、光学ユニット100の上方に設けられるクリーンな空気(以下、クリーンエアという)を送り込むFFUを有する外装を備えていれば、クリーンルームを形成することができるので好ましい。このクリーンルームは、基板の搬入口および搬出口ならびに下部のダクト以外、密閉された内部空間である。
【0035】
FFUは、例えば、パーティクルなどのダストが除去されたクリーンエアを送出する。この結果、特に光学ユニット100の移動領域を、ダストの少ないクリーンな状態とする。また、光学ユニット100近傍に集中して送出されたクリーンな空気は、クリーンルーム内でダウンフローを形成したのち、排気口から排気される。
【0036】
制御機構3は、制御部30、入力部31、出力部32、検査部33および記憶部34を備える。制御機構3は、ROM、RAM、通信機能等を備えたコンピュータで実現される。
【0037】
制御部30は、FPD検査装置1全体の制御を行う。また、制御部30は、第1基板搬送機構13および第2基板搬送機構14を制御して基板の搬送を制御する搬送制御部35を有する。搬送制御部35は、搬送機構(第1,2基板搬送機構)から適宜座標を取得して、搬送機構による基板搬送の制御を行う。
【0038】
入力部31は、キーボード、マウス、タッチパネル、ボタン等を用いて構成され、検体の分析に必要な諸情報や分析動作の指示情報等を外部から入力する。出力部32は、ディスプレイ等を用いて構成される。
【0039】
検査部33は、光学ユニット100によって取得された画像またはそのスペクトルをもとに基板Wの測定および/または検査を行う。
【0040】
記憶部34は、情報を磁気的に記憶するハードディスクと、FPD検査装置1が処理を実行する際にその処理にかかわる、本実施の形態にかかる検査プログラムを含む各種プログラムをハードディスクからロードして電気的に記憶するメモリとを用いて構成される。
【0041】
上述したFPD検査装置1では、外部からステージ11に搬入された基板Wに対して、制御部30の制御のもと、基板Wの載置位置の調整を行なった後、第1基板搬送機構13によって外部から受け入れた基板Wを吸着保持して搬送方向Dに搬送し、第2基板搬送機構14によって搬送方向Dに搬送される基板Wに対して光学ユニット100が基板Wの欠陥検査等を行う。
【0042】
図3は、本実施の形態にかかるFPD検査装置1が行う搬送処理を示すフローチャートである。まず、搬送制御部35は、第1搬送部132を基板受入位置に移動させる(ステップS102)。ここで、基板受入位置は、外部からの基板Wを受け入れるための位置であって、例えば、搬送軸131における搬送空間TR1の検査空間PR1側と異なる側の端部側に設けられる。
【0043】
第1搬送部132を基板受入位置に移動させると、搬送制御部35は、第1搬送部132の吸着パッド133を駆動して基板Wの受け入れを行う(ステップS104)。第1搬送部132は、吸着パッド133によって基板Wを吸着保持する(ステップS106)。
【0044】
吸着パッド133によって基板Wが保持されると、図4に示すように、搬送制御部35は、第1搬送部132を駆動して基板Wを第1基板受渡位置に移動させる(ステップS108)。ここで、第1基板受渡位置は、第2搬送部142が、搬送空間TR1において基板Wを搬送した第1搬送部132から基板Wの受渡しを行うための位置であって、例えば、搬送軸131における検査空間PR1の搬送空間TR1側の端部側に設けられる。このとき、第1搬送部132は、搬送方向Dに対する後方側の端部が検査空間PR1と搬送空間TR1との境界に位置する。
【0045】
第1搬送部132が第1基板受渡位置に移動すると、搬送制御部35は、第1搬送部132(吸着パッド133)が保持する基板Wを第2搬送部142(吸着パッド143)に受け渡す処理を行う(ステップS110)。ここで、基板Wの受渡し処理では、第2搬送部142が吸着パッド143によって基板Wを吸着保持した後、第1搬送部132の吸着パッド133の吸着保持を解除することによって第1搬送部132から第2搬送部142に基板Wが受け渡される。
【0046】
第2搬送部142によって基板Wが保持されると、搬送制御部35は、図5に示すように、第2搬送部142を駆動して基板Wを移動させる。この移動に伴って制御部30は、光学ユニット100を駆動して、基板Wの画像取得を行う。制御部30は、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS112)。
【0047】
このとき、第1搬送部132は、搬送制御部35の制御のもと、搬送軸131上を移動して、第2基板受渡位置に配置される。ここで、第2基板受渡位置は、第1搬送部132が検査空間PR1において基板Wを搬送した第2搬送部142から基板Wの受渡しを行うための位置であって、例えば、搬送軸131における検査空間PR1の搬送空間TR2側の端部側に設けられる。このとき、第1搬送部132は、搬送方向Dに対する前方側の端部が検査空間PR1と搬送空間TR2との境界に位置する。なお、第1搬送部132が基板Wの下部を通過する際、搬送制御部35が、吸着パッド133の吸着面が基板Wと接触しないよう吸着パッド133を下降させることが好ましい。
【0048】
第2搬送部142の移動に伴う基板検査処理が終了すると、第2搬送部142は、第2基板受渡位置に位置する。ここで、図6に示すように、待機している第1搬送部132に再び基板を受け渡す基板受渡し処理を行う(ステップS114)。この基板受渡し処理では、第1搬送部132が吸着パッド133によって基板Wを吸着保持した後、第2搬送部142の吸着パッド143の吸着保持を解除することによって第2搬送部142から第1搬送部132に基板Wが受け渡される。
【0049】
ステップS114において、第1搬送部132が検査空間PR1を通過した基板を保持すると、搬送制御部35は、図7に示すように、第1搬送部132を基板払出位置に移動させる(ステップS116)。ここで、基板払出位置は、光学ユニット100による撮像処理の終了した基板Wを外部への払い出すための位置であって、例えば、搬送軸131における搬送空間TR2の検査空間PR1側と異なる側の端部に設けられる。
【0050】
基板Wを保持した第1搬送部132が基板払出位置に到達すると、外部の搬送機構によって、基板Wが外部に搬送される(ステップS118)。基板Wの払出し後、次の検査対象基板がある場合(ステップS120:Yes)、制御部30は、ステップS102に移行して、次の基板に対して上述した処理を繰り返す。また、次の検査対象基板がない場合(ステップS120:No)、制御部30は、基板の搬送処理を終了する。
【0051】
上述した本実施の形態1によれば、搬送空間において基板を搬送する第1搬送部と、検査空間において基板を搬送し、第1搬送部と比して高い移動分解能を有する第2搬送部と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査精度を維持しつつ、効率的な処理を行うことを可能とする。
【0052】
また、本実施の形態1では、高価なリニアモータおよびリニアモータガイドは、検査空間にかかる領域のみで使用し、搬送空間においては、安価なベルト等の構成で基板を搬送するようにしたので、安価に製造し、かかるFPD検査装置の製造コストを抑制することができる。
【0053】
なお、上述した実施の形態1において、順次送られる基板のうち、画像を取得する必要のない基板がある場合は、第1搬送部132が搬送空間TR1から搬送空間TR2まで基板Wを搬送する。この場合においても、比較的高速で移動する第1搬送部132が基板受入位置から基板払出位置まで基板Wを搬送するため、効率的に基板の搬送処理を行うことができる。
【0054】
図8は、本実施の形態1の変形例1にかかるFPD検査装置1aの構成を模式的に示す上面図である。変形例1にかかる基板処理部2aは、基板Wの高倍率画像を取得する高倍画像取得部としての光学ユニット100を保持するガントリステージ10のほか、照明部材15およびラインセンサカメラ16を有し、基板Wの全体画像を取得する全体画像取得部17を備える。また、制御機構3aは、上述した入力部31、出力部32および記憶部34のほか、全体画像取得部17を含むFPD検査装置1aの制御を行う制御部30aと、基板Wの搬送処理の制御を行なう搬送制御部35aと、光学ユニット100および全体画像取得部17から取得した画像の測定および/または検査を行う検査部33aと、を備える。
【0055】
全体画像取得部17は、搬送方向Dと直交する方向であるステージ11の幅方向に延び、基板Wを照明する線状光源を有する照明部材15と、照明部材15からの照明光の反射光を取り込んで、基板Wの全体画像を取得するラインセンサカメラ16とを有する。ラインセンサカメラ16は、基板Wが反射した照明部材15からの反射光を取り込める位置に配設される。
【0056】
なお、ラインセンサカメラ16は、照明部材15が照射する照射光に対して、正反射光を取得するものであってよいし、散乱光を取得するものであってもよい。取得する光に応じてラインセンサカメラの位置、角度は適宜変更可能である。
【0057】
上述した変形例1にかかるFPD検査装置1aでは、外部からステージ11に搬入された基板Wに対して、制御部30aの制御のもと、基板Wの載置位置の調整を行なった後、吸着パッド133によって基板Wを吸着保持して搬送方向Dに搬送して、全体画像取得部17で全体画像を取得し、光学ユニット100によって基板Wの欠陥検査等を行う。このとき、第1搬送部132は、搬送制御部35aの制御のもと、基板Wを、全体画像取得部17を通過させた後に、再度ステージ11の搬入位置まで戻って第2搬送部14に基板を受渡し、第2搬送部14が基板Wを搬送方向Dに移動させて光学ユニット100による欠陥検査を行う。なお、全体画像取得部17から光学ユニット100までの距離が、基板Wに対して十分長い場合は、全体画像取得部17による全体画像の取得後、基板Wを戻さずに光学ユニット100による欠陥検査を行うことができる。
【0058】
また、全体画像取得部17の画像取得において、第1搬送部132の移動速度および移動分解能であっても画像が取得できる場合、第1搬送部132は、第2搬送部142へ基板Wの受渡しを行わずに、基板Wを搬送してもよい。このとき、第1搬送部132により一定の速度で基板Wを搬送空間TR1から搬送空間TR2にかけて移動させるとともに、全体画像取得部17による画像取得が行われる。
【0059】
図9は、本実施の形態1の変形例2にかかるFPD検査装置1bの構成を模式的に示す上面図である。変形例2にかかる基板処理部2bは、上述した第1基板搬送機構13のほか、ステージ11の幅方向(搬送方向Dに垂直な方向)の中央部に設けられ、検査空間PR1において基板Wの搬送を行う第2基板搬送機構18を備える。また、制御機構3bは、上述した入力部31、出力部32、検査部33および記憶部34のほか、第2搬送機構18を含むFPD検査装置1bの制御を行う制御部30bと、基板Wの搬送処理の制御を行なう搬送制御部35bと、を備える。
【0060】
第2基板搬送機構18は、搬送方向Dに平行な搬送軸181上を移動する第2搬送部182を有する。第2搬送部182は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド183を保持する。各吸着パッド183は、第2搬送部182の移動方向に垂直な方向に昇降可能(図9の紙面に垂直な方向に移動可能)である。また、搬送軸181は、ステージ11の搬送方向と平行に延び、検査空間PR1を含む領域に配設されている。第2基板搬送機構18は、搬送軸181としてリニアモータガイドを用いるとともに、第2搬送部182としてリニアモータを用いることによって実現される。なお、第2基板搬送機構18は、リニアモータおよびリニアモータガイドのほか、ボールねじを用いた構成によっても実現可能である。なお、第2搬送部182は、上述した第2搬送部142と同一の移動分解能および等速性能で基板を搬送する。
【0061】
変形例2にかかるFPD検査装置1bによれば、第2基板搬送機構18がステージ11の幅方向の中央に設けられることによって、ステージ11に搬入された基板Wの重心位置を含む領域を保持することが可能となり、安定した基板搬送を行うことができる。また、上述した実施の形態1と異なり、ステージ11の搬送方向Dと平行な側の端部に第2搬送機構が配設されないため、ステージの幅方向(搬送方向Dに垂直な方向)で省スペース化することができる。
【0062】
(実施の形態2)
図10は、本実施の形態2にかかるFPD検査装置の概略構成を示す上面図である。図10に示すように、FPD検査装置1cは、搬送された矩形をなす基板Wの画像取得を行う基板処理部2cと、基板処理部2c全体の制御を行う制御機構3cと、を備える。本実施の形態2にかかる基板処理部2cは、上述した第1基板搬送機構13および第2基板搬送機構18のほか、ステージ11の外縁側であって、ステージ11が設けられる外縁側と対向する外縁側に設けられ、搬送方向Dに沿って基板Wを搬送する第3基板搬送機構19を備える。また、制御機構3cは、上述した入力部31、出力部32、検査部33および記憶部34のほか、第3基板搬送機構19を含む基板処理部2cの制御を行う制御部30cと、基板Wの搬送処理の制御を行なう搬送制御部35cと、を備える。
【0063】
第3基板搬送機構19は、搬送方向Dに平行な搬送軸191上を移動する第3搬送部192を有する。第3搬送部192は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド193を保持する。各吸着パッド193は、第3搬送部192の移動方向に垂直な方向に昇降可能(図10の紙面に垂直な方向に移動可能)である。また、搬送軸191は、ステージ11の搬送方向と平行に延び、検査空間PR1および搬送空間TR1,TR2を含む領域に配設されている。第3基板搬送機構19は、搬送軸191としてベルトが用いられることによって実現される。なお、第3基板搬送機構19は、ベルトのほか、ラックアンドピニオンを用いても実現可能である。
【0064】
ここで、第3搬送部192は、第1搬送部132と同様に、第2搬送部182と比して高い速度で基板Wの搬送を行う。このとき、第3搬送部192は、第1搬送部132と同じ速度で基板Wを搬送することが好ましい。
【0065】
図11は、本実施の形態にかかるFPD検査装置1cが行う搬送処理を示すフローチャートである。まず、搬送制御部35cは、第1搬送部132を基板受入れ位置に移動させる(ステップS202)。第1搬送部132を基板受入位置に移動させると、搬送制御部35cは、第1搬送部132の吸着パッド133を駆動して基板W1の受け入れを行う(ステップS204)。第1搬送部132は、吸着パッド133によって基板W1を吸着保持する(ステップS206)。
【0066】
第1搬送部132によって基板W1が保持されると、搬送制御部35cは、光学ユニット100による撮像処理等が行われている状態(検査中の状態)であるか否かを判断する(ステップS208)。ここで、搬送制御部35cは、検査中であると判断した場合(ステップS208:Yes)、再度検査中であるか否かの判断を行い、検査中の状態が解除されるまで判断処理を繰り返す。
【0067】
また、搬送制御部35cは、検査中でないと判断した場合(ステップS208:No)、第1搬送部132を駆動して基板W1を第1基板受渡位置に移動させる(ステップS210)。第1搬送部132が第1基板受渡位置に移動すると、搬送制御部35cは、図12に示すように、第1搬送部132が保持する基板W1を第2搬送部182に受け渡す処理を行う(ステップS212)。ここで、基板W1の受渡し処理では、第2搬送部182が吸着パッド183によって基板W1を吸着保持した後、第1搬送部132の吸着パッド133の吸着保持を解除することによって第1搬送部132から第2搬送部182に基板W1が受け渡される。
【0068】
第2搬送部182によって基板W1が保持されると、搬送制御部35cは、第2搬送部182を駆動して基板W1を移動させる。この移動に伴って制御部30cは、光学ユニット100を駆動して、基板W1の画像取得を行う。制御部30cは、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS214)。
【0069】
このとき、第1搬送部132は、搬送制御部35cの制御のもと、搬送軸131上を移動して、第2基板受渡位置に配置される。第2搬送部182の移動に伴う基板検査処理が終了すると、第2搬送部182は、第2基板受渡位置に移動する。ここで、第2搬送部182は、図13に示すように、待機している第1搬送部132に再び基板を受け渡す基板受渡し処理を行う(ステップS216)。この基板受渡し処理では、第1搬送部132が吸着パッド133によって基板W1を吸着保持した後、第2搬送部182の吸着パッド183の吸着保持を解除することによって第2搬送部182から第1搬送部132に基板W1が受け渡される。
【0070】
ステップS216において、第1搬送部132が検査空間PR1を通過した基板を保持すると、搬送制御部35cは、図14に示すように、第1搬送部132を基板払出位置に移動させる(ステップS218)。基板W1を保持した第1搬送部132が基板払出位置に到達すると、外部の搬送機構によって、基板W1が外部に搬送される(ステップS220)。
【0071】
基板W1の払出し後、次に第1基板搬送機構13が搬送処理を行う検査対象基板がある場合(ステップS222:Yes)、制御部30cは、ステップS202に移行して、次の基板に対して上述した処理を繰り返す。また、次に第1基板搬送機構13が搬送処理を行う検査対象基板がない場合(ステップS222:No)、制御部30cは、基板の搬送処理を終了する。
【0072】
一方、ステップS216において、基板W1の基板検査処理中、搬送制御部35cは、第3搬送部192を基板受入れ位置に移動させる(ステップS224)。ここで、基板受入位置は、外部からの基板W2を受け入れるための位置であって、例えば、搬送軸191における搬送空間TR1の検査空間PR1側と異なる側の端部側(ステージを介して対向する位置)に設けられる。
【0073】
第3搬送部192を受入位置に移動させると、搬送制御部35cは、図14に示すように、第3搬送部192の吸着パッド193を駆動して基板W2の受け入れを行う(ステップS226)。第3搬送部192は、吸着パッド193によって基板W2を吸着保持する(ステップS228)。
【0074】
第3搬送部192によって基板W2が保持されると、搬送制御部35cは、光学ユニット100による撮像処理等が行われている状態(検査中の状態)であるか否かを判断する(ステップS230)。ここで、搬送制御部35cは、検査中であると判断した場合(ステップS230:Yes)、再度検査中であるか否かの判断を行い、検査中の状態が解除されるまで判断処理を繰り返す。
【0075】
また、搬送制御部35cは、検査中でないと判断した場合(ステップS230:No)、第3搬送部192を駆動して基板W2を第3基板受渡位置に移動させる(ステップS232)。ここで、第3基板受渡位置は、第2搬送部182が搬送空間TR1において基板W2を搬送した第3搬送部192から基板W2の受渡しを行うための位置であって、例えば、搬送軸191における検査空間PR1の搬送空間TR1側の端部側に設けられる。このとき、第3搬送部192は、搬送方向Dに対する後方側の端部が検査空間PR1と搬送空間TR1との境界に位置する。
【0076】
第3搬送部192が第3基板受渡位置に移動すると、搬送制御部35cは、第3搬送部192が保持する基板W2を第2搬送部182に受け渡す処理を行う(ステップS234)。ここで、基板W2の受渡し処理では、第2搬送部182が吸着パッド183によって基板W2を吸着保持した後、第3搬送部192の吸着パッド193の吸着保持を解除することによって第3搬送部192から第2搬送部182に基板W2が受け渡される。
【0077】
第2搬送部182によって基板W2が保持されると、搬送制御部35cは、第2搬送部182を駆動して基板W2を移動させる。この移動に伴って制御部30cは、光学ユニット100を駆動して、基板W2の画像取得を行う。制御部30cは、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS236)。
【0078】
このとき、第3搬送部192は、搬送制御部35cの制御のもと、搬送軸191上を移動して、第4基板受渡位置に配置される。ここで、第4基板受渡位置は、第3搬送部192が検査空間PR1において基板W2を搬送した第2搬送部182から基板W2の受渡しを行うための位置であって、例えば、搬送軸191における検査空間PR1の搬送空間TR2側の端部側に設けられる。このとき、第3搬送部192は、搬送方向Dに対する前方側の端部が検査空間PR1と搬送空間TR2との境界に位置する。
【0079】
第2搬送部182の移動に伴う基板検査処理が終了すると、第2搬送部182は、第2基板受渡位置に移動する。ここで、第2搬送部182は、待機している第3搬送部192に再び基板W2を受け渡す基板受渡し処理を行う(ステップS238)。この基板受渡し処理では、第3搬送部192が吸着パッド193によって基板W2を吸着保持した後、第2搬送部182の吸着パッド183の吸着保持を解除することによって第2搬送部182から第3搬送部192に基板W2が受け渡される。
【0080】
ステップS238において、第3搬送部192が検査空間PR1を通過した基板W2を保持すると、搬送制御部35cは、第3搬送部192を基板払出位置に移動させる(ステップS240)。ここで、基板払出位置は、光学ユニット100による撮像処理の終了した基板W2を外部への払い出すための位置であって、例えば、搬送軸191における搬送空間TR2の検査空間PR1側と異なる側の端部に設けられる。
【0081】
基板W2を保持した第3搬送部192が基板払出位置に到達すると、外部の搬送機構によって、基板W2が外部に搬送される(ステップS242)。基板W2の払出し後、次に第3基板搬送機構19が搬送処理を行う検査対象基板がある場合(ステップS244:Yes)、制御部30cは、ステップS224に移行して、次の基板に対して上述した処理を繰り返す。また、次に第3基板搬送機構19が搬送処理を行う検査対象基板がない場合(ステップS244:No)、制御部30cは、基板の搬送処理を終了する。
【0082】
上述した本実施の形態2によれば、上述した実施の形態1と同様、搬送空間において基板を搬送する第1,3搬送部と、検査空間において基板を搬送し、第1,3搬送部と比して高い移動分解能を有する第2搬送部と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査精度を維持しつつ、効率的な処理を行うことを可能とする。
【0083】
また、上述した実施の形態2では、ステージ上に1または複数の基板が順次載置され、この基板を2つの搬送機構(第1,3基板搬送機構)で連続的に搬送して検査を行うため、処理の効率を一段と向上させることが可能となる。
【0084】
なお、検査空間PR1の搬送方向Dの長さが、検査対象の基板に対して十分な長さ、具体的には、基板2枚以上の長さである場合、第2搬送部を搬送方向に対して垂直な方向に2つ設け、より搬送ピッチを狭めて搬送処理を行ってもよい。2つの第2搬送部は、順次搬送される基板に対して交互に搬送する。これにより、ステージ11上に3以上の基板を載置して処理することができ、一段と効率的に処理して、処理時間を短縮することが可能となる。
【0085】
(実施の形態3)
図15は、本実施の形態3にかかるFPD検査装置の概略構成を示す上面図である。図15に示すように、FPD検査装置1dは、搬送された矩形をなす基板Wの画像取得を行う基板処理部2dと、基板処理部2d全体の制御を行う制御機構3dと、を備える。本実施の形態3にかかる基板処理部2dは、上述した第2基板搬送機構18のほか、ステージ11において搬送方向Dに平行な一つの辺に隣接してそれぞれ設けられ、搬送方向Dに沿って基板を搬送する受入側基板搬送機構20および払出側基板搬送機構21を備える。また、制御機構3dは、上述した入力部31、出力部32、検査部33および記憶部34のほか、受入側基板搬送機構20および払出側基板搬送機構21を含む基板処理部2dの制御を行う制御部30dと、基板の搬送処理の制御を行なう搬送制御部35dと、を備える。
【0086】
受入側基板搬送機構20は、ステージ11の搬送方向Dに沿った外縁側に設けられ、搬送方向Dに平行な搬送軸201上を移動する受入側搬送部202(第1搬送部)を有する。受入側搬送部202は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド203を保持する。各吸着パッド203は、受入側搬送部202の移動方向に垂直な方向に昇降可能(図15の紙面に垂直な方向に移動可能)である。また、搬送軸201は、ステージ11の搬送方向と平行に延び、搬送空間TR1と検査空間PR1の一部とを含む領域に配設されている。受入側基板搬送機構20は、搬送軸201としてベルトが用いられることによって実現される。なお、受入側基板搬送機構20は、ベルトのほか、ラックアンドピニオンを用いても実現可能である。
【0087】
払出側基板搬送機構21は、受入側基板搬送機構20に対して搬送方向Dの下流側に設けられ、搬送方向Dに平行な搬送軸211上を移動する払出側搬送部212(第1搬送部)を有する。払出側搬送部212は、搬送方向Dに沿って複数設けられ、図示しないポンプによる吸気によって基板Wを吸着保持する吸着パッド213を保持する。各吸着パッド213は、払出側搬送部212の移動方向に垂直な方向に昇降可能(図15の紙面に垂直な方向に移動可能)である。また、搬送軸211は、ステージ11の搬送方向と平行に延び、搬送空間TR2と検査空間PR1の一部とを含む領域に配設されている。払出側基板搬送機構21は、搬送軸211としてベルトが用いられることによって実現される。なお、払出側基板搬送機構21は、ベルトのほか、ラックアンドピニオンを用いても実現可能である。
【0088】
ここで、搬送軸201,211は、一直線状に配設される。また、受入側搬送部202および払出側搬送部212は、上述した第1搬送部132と同様に、第2搬送部182と比して速い速度で基板Wの搬送を行う。このとき、受入側搬送部202および払出側搬送部212は、同じ速度で基板を搬送することが好ましい。
【0089】
図16は、本実施の形態にかかるFPD検査装置1dが行う搬送処理を示すフローチャートである。まず、搬送制御部35dは、受入側搬送部202を基板受入位置に移動させるとともに、払出側搬送部212を払出側基板受渡位置に移動させる(ステップS302)。ここで、基板受入位置は、外部からの基板Wを受け入れるための位置であって、例えば、搬送軸201における検査空間PR1の搬送空間TR2側の端部に設けられる。また、払出側基板受渡位置は、払出側搬送部212が検査空間PR1において基板Wを搬送した第2搬送部182から基板Wの受渡しを行うための位置であって、例えば、搬送軸211における検査空間PR1の搬送空間TR2側の端部側に設けられる。このとき、払出側搬送部212は、搬送方向Dに対する前方側の端部が検査空間PR1と搬送空間TR2との境界に位置する。
【0090】
受入側搬送部202を基板受入位置に移動させると、搬送制御部35dは、受入側搬送部202を駆動して基板W1の受け入れを行う(ステップS304)。受入側搬送部202は、吸着パッド203によって基板W1を吸着保持する(ステップS306)。
【0091】
受入側搬送部202によって基板W1が保持されると、搬送制御部35dは、光学ユニット100による撮像処理等が行われている状態(検査中の状態)であるか否かを判断する(ステップS308)。ここで、搬送制御部35dは、検査中であると判断した場合(ステップS308:Yes)、再度検査中であるか否かの判断を行い、検査中の状態が解除されるまで判断処理を繰り返す。
【0092】
また、搬送制御部35dは、検査中でないと判断した場合(ステップS308:No)、受入側搬送部202を駆動して基板W1を受入側基板受渡位置に移動させる(ステップS310)。また、受入側基板受渡位置は、第2搬送部182が検査空間PR1において基板W1を搬送した受入側搬送部202から基板W1の受渡しを行うための位置であって、例えば、搬送軸201における検査空間PR1の搬送空間TR1側の端部に設けられる。このとき、受入側搬送部202は、搬送方向Dに対する後方側の端部が検査空間PR1と搬送空間TR1との境界に位置する。
【0093】
受入側搬送部202が受入側基板受渡位置に移動すると、搬送制御部35dは、図17に示すように、受入側搬送部202が保持する基板W1を第2搬送部182に受け渡す処理を行う(ステップS312)。ここで、基板W1の受渡し処理では、第2搬送部182が吸着パッド183によって基板W1を吸着保持した後、受入側搬送部202の吸着パッド203の吸着保持を解除することによって受入側搬送部202から第2搬送部182に基板W1が受け渡される。
【0094】
第2搬送部182によって基板W1が保持されると、搬送制御部3dは、受入側搬送部202を基板受入位置へ移動させると同時に、第2搬送部182を駆動して基板W1を移動させる(ステップS314)。この移動に伴って制御部30dは、光学ユニット100を駆動して、基板W1の画像取得を行う。制御部30dは、光学ユニット100によって取得した画像を検査部33に出力し、検査部33に測定および/または検査を行わせる(ステップS316)。
【0095】
第2搬送部182の移動に伴う基板検査処理が終了すると、第2搬送部182は、ステージ11上において搬送方向Dに垂直な方向が払出側基板受渡位置に対応する位置に移動している。ここで、第2搬送部182は、図18に示すように、待機している払出側搬送部212に基板W1を受け渡す基板受渡し処理を行う(ステップS318)。この基板受渡し処理では、払出側搬送部212が吸着パッド213によって基板W1を吸着保持した後、第2搬送部182の吸着パッド183の吸着保持を解除することによって第2搬送部182から払出側搬送部212に基板W1が受け渡される。
【0096】
ステップS318において、払出側搬送部212が検査空間PR1を通過した基板W1を保持すると、搬送制御部35dは、図19に示すように、払出側搬送部212を基板払出位置に移動させる(ステップS320)。ここで、基板払出位置は、光学ユニット100による撮像処理の終了した基板W1を外部への払い出すための位置であって、例えば、搬送軸211における搬送空間TR2の検査空間PR1側と異なる側の端部に設けられる。
【0097】
基板W1を保持した払出側搬送部212が基板払出位置に到達すると、外部の搬送機構によって、基板W1が外部に搬送される(ステップS322)。
【0098】
基板W1の払出し後、次に搬送処理を行う検査対象基板がある場合(ステップS324:Yes)、搬送制御部35dは、払出側搬送部212を払出側基板受渡位置に移動させ(ステップS326)、ステップS304に移行して、次の基板に対して上述した処理を繰り返す。また、次に搬送処理を行う検査対象基板がない場合(ステップS324:No)、搬送制御部35dは、基板の搬送処理を終了する。
【0099】
上述した本実施の形態3によれば、上述した実施の形態1と同様、搬送空間において基板を搬送する第1基板搬送機構と、検査空間において基板を搬送し、第1基板搬送機構と比して高い移動分解能を有する第2基板搬送機構と、を別個独立に設け、それぞれの搬送形態に対応して駆動制御するようにしたので、検査精度を維持しつつ、効率的な処理を行うことを可能とする。
【0100】
また、上述した実施の形態3では、ステージ上に1または複数の基板が順次載置され、この基板を2つの搬送機構(受入側、払出側基板搬送機構)で連続的に搬送して検査を行うため、処理の効率を一段と向上させることが可能となる。
【0101】
なお、本実施の形態3において、検査空間PR1における基板の搬送を、ステージ11の幅方向の中央に設けられる第2基板搬送機構18であるものとして説明したが、上述した実施の形態1のような、ステージ11の搬送方向Dに沿った外縁側に設けられる第2基板搬送機構14を適用することも可能である。
【0102】
以上のように、本発明にかかる基板搬送装置は、検査精度を維持しつつ、効率的な処理を行うことに有用である。
【符号の説明】
【0103】
1,1a,1b,1c,1d FPD検査装置
2,2a,2b,2c,2d 基板処理部
3,3a,3b,3c,3d 制御機構
10 ガントリステージ
11 ステージ
12 架台
12a 振動吸収機構
13 第1基板搬送機構
14,18 第2基板搬送機構
15 照明部材
16 ラインセンサカメラ
17 全体画像取得部
19 第3基板搬送機構
20 受入側基板搬送機構
21 払出側基板搬送機構
31 入力部
32 出力部
33,33a 検査部
34 記憶部
100 光学ユニット
101 顕微鏡
131,141,181,191,201,211 搬送軸
132 第1搬送部
142,182 第2搬送部
133,143,183,193,203,213 吸着パッド
192 第3搬送部
202 受入側搬送部
212 払出側搬送部
L1 検査ライン
PR1 検査空間
TR1,TR2 搬送空間
W,W1,W2 基板
【特許請求の範囲】
【請求項1】
搬送対象の基板に所定の処理を施す処理手段と、前記基板を載置して、該基板を搬送する搬送ステージとを有する基板搬送装置であって、
前記搬送ステージの前記基板を搬送する搬送方向に沿った外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第1搬送部と、
前記処理手段が前記基板に対して処理を施す処理領域で前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送し、前記第1搬送部と比して高い移動分解能を有する第2搬送部と、
前記第1搬送部および前記第2搬送部における前記基板の搬送を制御する搬送制御部と、
を備えたことを特徴とする基板搬送装置。
【請求項2】
前記第2搬送部は、前記第1搬送部と比して高い等速性能を有することを特徴とする請求項1に記載の基板搬送装置。
【請求項3】
前記搬送制御部は、前記第1搬送部に前記第2搬送部と比して大きい速度で前記基板を搬送させることを特徴とする請求項1または2に記載の基板搬送装置。
【請求項4】
前記第2搬送部は、前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられることを特徴とする請求項1に記載の基板搬送装置。
【請求項5】
前記第2搬送部は、前記搬送ステージの前記搬送方向に垂直な方向の中央部に設けられることを特徴とする請求項1に記載の基板搬送装置。
【請求項6】
前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第3搬送部をさらに備え、
前記第2搬送部は、前記第3搬送部と比して高い移動分解能を有することを特徴とする請求項5に記載の基板搬送装置。
【請求項7】
前記第1搬送部は、
外部から前記基板を受け入れる受入側搬送部と、
前記受入側搬送部に対して前記搬送方向の下流側に設けられ、外部へ前記基板を払い出す払出側搬送部と、
を有することを特徴とする請求項1〜5のいずれか一つに記載の基板搬送装置。
【請求項1】
搬送対象の基板に所定の処理を施す処理手段と、前記基板を載置して、該基板を搬送する搬送ステージとを有する基板搬送装置であって、
前記搬送ステージの前記基板を搬送する搬送方向に沿った外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第1搬送部と、
前記処理手段が前記基板に対して処理を施す処理領域で前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送し、前記第1搬送部と比して高い移動分解能を有する第2搬送部と、
前記第1搬送部および前記第2搬送部における前記基板の搬送を制御する搬送制御部と、
を備えたことを特徴とする基板搬送装置。
【請求項2】
前記第2搬送部は、前記第1搬送部と比して高い等速性能を有することを特徴とする請求項1に記載の基板搬送装置。
【請求項3】
前記搬送制御部は、前記第1搬送部に前記第2搬送部と比して大きい速度で前記基板を搬送させることを特徴とする請求項1または2に記載の基板搬送装置。
【請求項4】
前記第2搬送部は、前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられることを特徴とする請求項1に記載の基板搬送装置。
【請求項5】
前記第2搬送部は、前記搬送ステージの前記搬送方向に垂直な方向の中央部に設けられることを特徴とする請求項1に記載の基板搬送装置。
【請求項6】
前記搬送ステージの外縁側であって、前記第1搬送部が設けられる外縁側と対向する外縁側に設けられ、前記搬送方向と平行に延びる搬送軸に沿って前記基板を保持して搬送する第3搬送部をさらに備え、
前記第2搬送部は、前記第3搬送部と比して高い移動分解能を有することを特徴とする請求項5に記載の基板搬送装置。
【請求項7】
前記第1搬送部は、
外部から前記基板を受け入れる受入側搬送部と、
前記受入側搬送部に対して前記搬送方向の下流側に設けられ、外部へ前記基板を払い出す払出側搬送部と、
を有することを特徴とする請求項1〜5のいずれか一つに記載の基板搬送装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−98482(P2013−98482A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242443(P2011−242443)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]