
基板検査装置、異物除去装置および異物除去方法
【課題】検査対象基板上の異物を確実に除去することができる基板検査装置の提供。
【解決手段】基板検査装置1は、マスク116、複数の粘着性粒子が離脱可能に設けられた剥離シート20、および粘着部材22が装着されるマスクホルダ117と、マスクホルダ117に対してマニピュレータ(例えばナノピンセット10)と検出部41とが設けられた検出ヘッド113を相対移動させる移動手段である鉛直方向駆動機構123および水平方向駆動機構124と、制御装置200を備えている。制御装置200は、剥離シート20に設けられた複数の微小吸着粒子のいずれか一つをマニピュレータで保持して離脱させ、微小吸着粒子を保持したマニピュレータを異物の位置へ移動し、異物を粘着性粒子に付着させてマスク116から除去し、異物が付着した微小吸着粒子を粘着部材22に付着させて移送する。
【解決手段】基板検査装置1は、マスク116、複数の粘着性粒子が離脱可能に設けられた剥離シート20、および粘着部材22が装着されるマスクホルダ117と、マスクホルダ117に対してマニピュレータ(例えばナノピンセット10)と検出部41とが設けられた検出ヘッド113を相対移動させる移動手段である鉛直方向駆動機構123および水平方向駆動機構124と、制御装置200を備えている。制御装置200は、剥離シート20に設けられた複数の微小吸着粒子のいずれか一つをマニピュレータで保持して離脱させ、微小吸着粒子を保持したマニピュレータを異物の位置へ移動し、異物を粘着性粒子に付着させてマスク116から除去し、異物が付着した微小吸着粒子を粘着部材22に付着させて移送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フォトマスク、液晶パネル、ウエハ等の基板に付着した異物を除去することができる基板検査装置、異物除去装置および異物除去方法に関する。
【背景技術】
【0002】
液晶パネル等の製造に用いられるマスクでは、マスクパターンの欠陥や異物の有無を検査する必要がある。マスク検査装置による検査で基準以上のパーティクルが検出された場合には、そのパーティクルをマスク基板から除去しなければならない。これらのパーティクルとしては、一般的に、油分や洗浄剤残渣等で固着したパーティクルや、静電気で吸着されたパーティクルがある。
【0003】
パーティクルを除去する方法としては、以下のような方法が知られている。
(1)洗浄により、溶剤と超音波等の作用により除去する方法。
(2)静電気による吸着物に対しては、除電を行ってパーティクルとマスクとの吸着力を弱めた後に、エアーブローによりそれらを吹き飛ばすと同時にバキュームで吸引して除去する方法。
(3)ナノピンセット等のマニピュレータでパーティクルを掴み、別途用意した粘着物上に付着させて廃棄する方法(例えば、特許文献1参照)。
(4)検査対象物の凹んだところに入ったパーティクルを、AFMカンチレバーなどの針状突起を持つ弾性体を用いて掻き出す方法(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−311521号公報
【特許文献2】特開2008−26671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、(1)に記載の方法の場合、固着したものと静電気によるものとの両方に有効ではあるが、基準ぎりぎりのごく少数のパーティクルの除去では、効率が悪く、改善が望まれている。(2)の方法では、マスクに固着したものは除去できず、また、10μm以下の微小なパーティクルの除電はとても難しく、静電力による吸着力を完全になくすことはできず、エアーブローで取り去ることができない場合がある。また、バキュームによる吸引を併用するとはいえ、除去したパーティクルがマスクに再付着するおそれがある。
【0006】
また、(3)のナノピンセットを用いる場合、ナノピンセットの把持部の厚さ(数μm〜数十μm)に対してパーティクルの厚さが充分大きければ、固着、吸着にかかわらずパーティクルを除去できるが、把持部の厚さに対して非常に薄い異物や大きさが小さすぎるパーティクルの場合には把持が難しく、特に、静電力等の吸着力が残っている場合には困難となる。(4)のカンチレバーを用いる場合には、搬送はカンチレバー先端とパーティクルとの静電力に頼るため、確実性に欠ける。
【課題を解決するための手段】
【0007】
請求項1の発明による基板検査装置は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、平板に設けられた複数の粘着性粒子のいずれか一つをマニピュレータで保持して平板から離脱させ、検査手段の検査結果に基づいて、マニピュレータに保持した粘着性粒子に異物を付着させて検査対象基板から除去し、該粘着性粒子をマニピュレータから粘着部材へ移送するようにマニピュレータを制御する制御手段と、を備えたことを特徴とする。
請求項2の発明による基板検査装置は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、保持指令により、マニピュレータを平板へ移動し、複数の粘着性粒子のいずれか一つをマニピュレータで保持して平板から離脱させる保持制御手段と、除去指令により、粘着性粒子を保持したマニピュレータを検査手段の検査結果に基づいて異物の位置へ移動し、異物を粘着性粒子に付着させて検査対象基板から除去する除去制御手段と、廃棄指令により、異物が付着した粘着性粒子を保持したマニピュレータを粘着部材へ移動し、該粘着性粒子を粘着部材に付着させてマニピュレータから粘着部材へ移送する廃棄制御手段と、を備えたことを特徴とする。
請求項3の発明は、請求項1または2に記載の基板検査装置において、異物を検査対象基板から除去した後に、検査対象基板上の異物が除去された領域を撮像装置により撮像して表示手段に表示することを特徴とする。
請求項4の発明は、請求項1または2に記載の基板検査装置において、撮像装置により撮像した画像を表示する表示手段を備え、異物を検査対象基板から除去する際の除去動作、および、異物を粘着部材へ移送する際の移送動作を、撮像装置により撮像して表示手段に表示することを特徴とする。
請求項5の発明は、請求項4に記載の基板検査装置において、異物を検査対象基板から除去した後に、検査対象基板上の異物が除去された領域を撮像装置により撮像して表示手段に表示するようにしたものである。
請求項6の発明は、請求項1〜5のいずれか一項に記載の基板検査装置において、マニピュレータはMEMS技術で形成された微小ピンセットであり、微小ピンセットにより粘着部材を把持するようにしたものである。
請求項7の発明による異物除去装置は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により検査対象基板を撮像して、該検査対象基板上の異物を観察する観察手段と、平板に設けられた複数の粘着性粒子のいずれか一つをマニピュレータで保持して平板から離脱させ、観察手段の観察結果に基づいて、マニピュレータに保持した粘着性粒子に異物を付着させて検査対象基板から除去し、該粘着性粒子をマニピュレータから粘着部材へ移送するようにマニピュレータを制御する制御手段と、を備えたことを特徴とする。
請求項8の発明による異物除去方法は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、を備える基板検査装置における異物除去方法であって、複数の粘着性粒子のいずれか一つをマニピュレータにより保持して平板から離脱させる第1の工程と、異物に関する検査結果に基づいて、マニピュレータで保持した粘着性粒子に検査対象基板上の異物を付着させる第2の工程と、異物が付着した粘着性粒子を粘着部材に押し付けて付着させることにより、粘着性粒子をマニピュレータから粘着部材へ移送する第3の工程と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、検査対象基板上の異物を確実に除去することができる。
【図面の簡単な説明】
【0009】
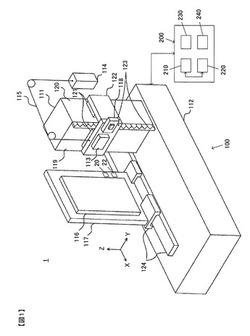
【図1】マスク検査装置の概略構成を示す斜視図である。
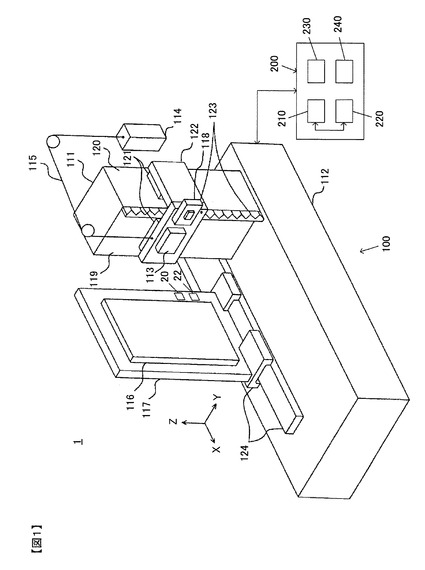
【図2】ヘッド用直角ステージ122の斜視図である。
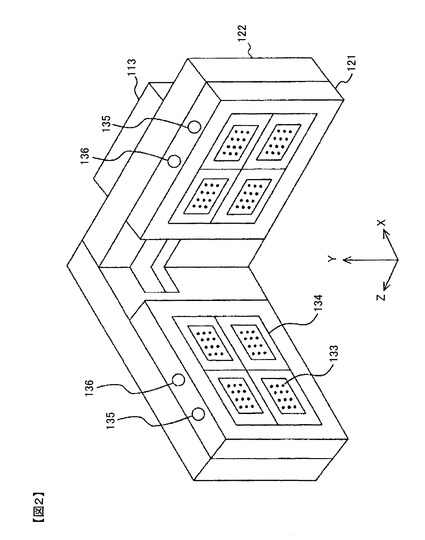
【図3】検出ヘッド113の詳細を示す図である。
【図4】ナノピンセット10の平面図である。
【図5】ホルダ130に装着されたナノピンセット10を示す図である。
【図6】アーム13a,13bと静電アクチュエータ14aの一部を示す拡大図である。
【図7】検査および異物除去動作の手順を示すフローチャートである。
【図8】検査動作を説明する図である。
【図9】微小吸着粒子21が形成された剥離シート20を示す図である。
【図10】マスク116、剥離シート20および粘着部材22が装着されたマスクホルダ117を示す図である。
【図11】微少吸着粒子21の把持動作を説明する図である。
【図12】異物除去動作を説明する図である。
【図13】除去確認動作を説明する図である。
【図14】異物除去動作における微少吸着粒子21への異物30の付着を説明する図である。
【発明を実施するための形態】
【0010】
以下、図を参照して本発明を実施するための形態について説明する。図1は本発明による基板検査装置の一実施の形態を示したものであり、マスク検査装置の概略構成を示す斜視図である(例えば、特許第3753108号、図1を参照)。なお、本実施形態ではマスク検査装置を例に説明するが、本発明は、液晶パネル、ウエハ等の検査装置にも同様に適用することができる。
【0011】
マスク検査装置1は、装置本体100と制御装置200とで構成される。装置本体100は、角柱111、定盤112、検出ヘッド113、バランスウェイト(カウンターウェイト)114、ワイヤー115、マスクホルダ117、鉛直方向駆動機構123、エアパッド121、ヘッド用直角ステージ122、モーターステージ118、水平方向移動機構124を備えている。
【0012】
定盤112の上には直方体の角柱111が鉛直に取り付けられており、その横に設けられた水平方向移動機構124にはマスクホルダ117が鉛直に設けられている。角柱111は加工の容易さおよび平面度の観点から、例えば御影石が用いられる。もちろん、金属やセラミックなどの御影石以外の材質でもよい。マスクホルダ117には、検査対象基板であるマスク116が取り付けられるようになっている。なお、マスク116とマスクホルダ117の取り付け角度は、マスク116の上下の辺が水平に維持されるように調整できる構成となっている。検査時には、マスク116が装着されたマスクホルダ117を、水平方向移動機構124によりX方向に移動させる。水平方向移動機構124はレール、リニアモーター等により構成される。
【0013】
角柱111の基準面である側面119,120には、ヘッド用直角ステージ122が設けられている。ヘッド用直角ステージ122の各側面119,120と対向する面には、エアパッド121がそれぞれ取り付けられている。ヘッド用直角ステージ122上には、検出ヘッド113およびモーターステージ118が装着されている。ヘッド用直角ステージ122の上部にはワイヤー115が取り付けられ、滑車を通じたその先にはバランスウェイト114が設けられている。バランスウェイト114は、検出ヘッド113等が設けられたヘッド用直角ステージ122と釣り合いが取れるように設定されている。ワイヤー115は、検出ヘッド113やヘッド用直角ステージ122等からなる移動部の重心位置に設けられていることが望ましい。
【0014】
ヘッド用直角ステージ122は、モーターステージ118とラックアンドピニオン等からなる鉛直方向駆動機構123によって上下に移動する。この上下移動の制御は制御装置200により行われ、検出ヘッド113をマスク116の検査位置へ自由に移動させることができる。また装置内にはクリーンエアがダウンフローしておりパーティクルの発生を抑制している。
【0015】
検査を行う場合には、検出ヘッド113が設けられたヘッド用直角ステージ122を所定の上下位置に停止させ、水平方向移動機構124によりマスクホルダ117をX方向に一定速度で移動させて、マスク116を検出ヘッド113の前を通過させる。その間に、CCDカメラにより画像を一定時間間隔で取得する。この取得された画像データは制御装置200の画像情報処理部210へ送られ、画像情報に基づいてマスク116の欠陥や異常およびゴミの有無を検査する。
【0016】
所定上下位置における画像取得が終了すると、ヘッド用直角ステージ122を鉛直方向に一定距離移動させた後、再びX方向にマスク116を移動させてCCDカメラによる画像取得を行う。このような動作を繰り返し行うことにより、マスク116の全面の検査をすることができる。この鉛直方向の移動ステップとマスク水平方向の移動速度はCCDカメラの視野範囲及び性能等により調整される。
【0017】
図2は、ヘッド用直角ステージ122の斜視図である。なお、図2ではモーターステージ118の図示は省略した。ヘッド用直角ステージ122には、角柱111の側面119,120と対向する部分に、軸受けの機能を有するエアパッド121がそれぞれ取り付けられている。エアパッド121の前記側面119,120と対向する面には、エア噴出部133と吸引部134とが設けられている。
【0018】
エアパッド121には、加工が容易であることからアルミナ等のセラミックが用いられる。エア噴出部133には空気を噴出する噴出孔が多数設けられている。吸引部134は、エア噴出部133を囲むように形成された溝から成る。図2に示す例では、エア噴出部133は4つの領域に分割されており、吸引部134は、それぞれの領域を囲むように形成されている。なお、エアパッド121の製造方法および内部構成については、例えば特開2002−106562号公報に詳細に記載されている。
【0019】
エアパッド121の上面には、エア供給口135とエア排気口136とが設けられている。エアパッド121の内部において、エア供給口135はエア噴出部133と連通しており、エア排気口136は吸引部134と連通している。エア供給口135には不図示の配管を介して加圧された空気が供給され、供給された空気はエア噴出部133から噴出される。一方、エア排気口136には不図示の配管が接続され、真空ポンプ等により真空排気が行われる。その結果、吸引部134から空気が吸引される。これらの配管はエアパッド121毎に別の配管を設けてもよいし、1系統の配管を途中で分岐しても良い。
【0020】
エアパッド121と各側面119,120との間隔は、エア噴出部133から噴出される空気による反発力と吸引部134から吸引される空気による吸引力の釣り合う所で一定になる。従ってエアパッド121は、角柱111に対して微小隙間を有して浮上することになる。外力や振動によってその隙間が狭くなった場合は、反発力の方が吸引力より強くなりもとの微小隙間に戻る。逆に、外力や振動によってその隙間が広くなった場合には、吸引力の方が反発力より強くなるためもとの微小隙間に戻る。そのため、外力や振動等による外乱があった場合でも、微小隙間の間隔は一定に保たれる。
【0021】
また、ヘッド用直角ステージ122には、X軸に垂直な側面119に対向するエアパッド121と、Y軸に垂直な側面120に対向するエアパッド121とが設けられているので、直交する2つの側面119,120との間の間隔がそれぞれ一定に保持されるので、直進性(真直度、ヨーイング、ピッチング、ローリング)の劣化を抑制することができる。さらに、接触部がないために精度劣化要因が取り除かれ、経時変化も防止できる。
【0022】
図3は、検出ヘッド113の詳細を示す図である。検出ヘッド113はY軸方向に移動可能なベース40を備えており、ベース40上には、パターン欠陥や異物を検出するための検出部41と、マスク116の表面に付着した異物を除去するための除去機構42とが設けられている。検出部41には顕微鏡(例えばコンフォーカル顕微鏡)が用いられ、レンズ411と光学素子412(例えば、CCDカメラ)とを備えている。検査対象であるマスク116は、検出部41に対してY軸マイナス方向に配置されており、図3のY軸方向が検出部41のフォーカス方向である。
【0023】
除去機構42は、マニピュレータとして機能する微小なピンセット(以下では、ナノピンセットと称する)10と、Y方向駆動部422と、旋回駆動部423とを備えている。詳細は後述するが、ナノピンセット10はMEMS技術等を利用して製作され、開閉可能な一対のアーム13a,13bを備えている。ナノピンセット10は、Y方向駆動部422によってY方向(検出部41のフォーカス方向)に移動することができる。Y方向駆動部422としては、例えば、圧電アクチュエータなどが用いられ、ミクロンオーダーでの微動移動が可能である。
【0024】
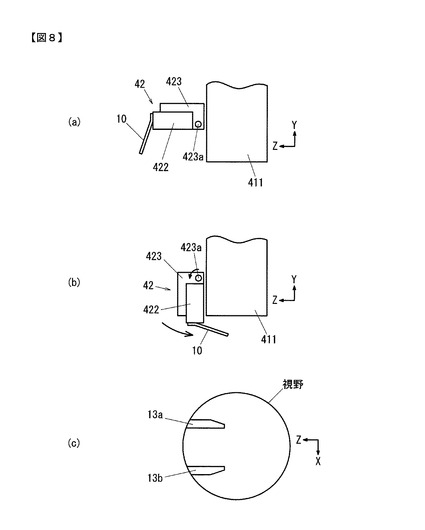
旋回駆動部423は、ナノピンセット10の顕微鏡視野内への挿脱を行うアクチュエータであり、除去機構42全体を軸423aを中心として回転駆動する。図3に示す状態は除去機構42の動作位置であって、ナノピンセット10はレンズ411の直下に挿入されている。異物除去動作を行わない非動作時には、除去機構42全体を反時計回りに回転して退避位置へと移動する。
【0025】
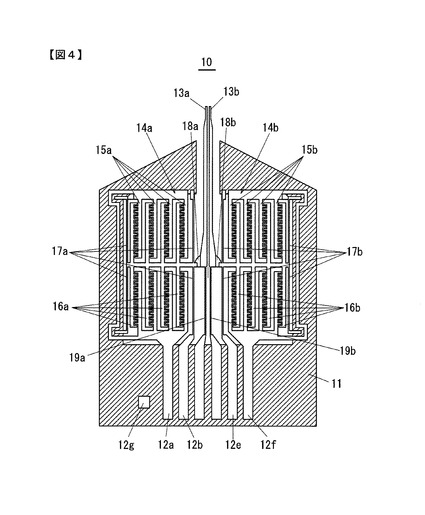
図4〜6は、ナノピンセット10を説明する図である。図4はナノピンセット10の平面図である。ナノピンセット10は、SOI(Silicon on Insulator)ウエハから一体で作製される。SOIウエハは、2枚のSi単結晶板の一方にSiO2層を形成し、SiO2層を介して貼り合わせたものである。
【0026】
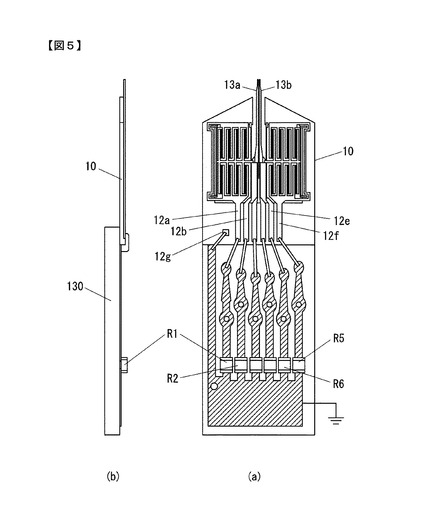
図4に示すように、ナノピンセット10は、一対のアーム13a,13b、一対の静電アクチュエータ14a,14b、一対の支持部17a,17b、一対の連結部18a,18と、一対のアーム支持部19a,19b、および台座11を備えている。静電アクチュエータ14aには、固定電極15aおよび可動電極16aが設けられ、静電アクチュエータ14bには固定電極15bおよび可動電極16bが設けられている。台座11は、図5に示すホルダ130に接合される。
【0027】
左右対称形状となっているアーム13aに関する静電アクチュエータ14aとアーム13bに関する静電アクチュエータ14bとは、同一構造を有している。固定電極15aおよび可動電極16aは、いずれも櫛歯形状を有しており、互いの櫛歯同士が隙間を介して噛み合うようなかたちで対向配置されている。固定電極15aは台座11上に形成されている。一方、可動電極16aは、細いビーム状の支持部17aによって台座11に弾性的に固定されている。固定電極15bおよび可動電極16bも同様の構造となっている。
【0028】
アーム13a,13bは、それぞれ細いビーム状のアーム支持部19a,19bを介して台座11に弾性的に固定されている。アーム13aと可動電極16aとは連結部18aによって連結され、アーム13bと可動電極16bとは連結部18bによって連結されている。
【0029】
端子12a,12b,12e,12f,12gは電圧を印加するための端子であり、左側のアーム13aに関して、端子12aは固定電極15aに接続され、端子12bは可動電極16aに接続されている。一方、右側のアーム13bに関しては、端子12eは可動電極16bに接続され、端子12fは固定電極15bに接続されている。端子12gは、台座11が浮遊電極となるのを防止するためのアース端子である。
【0030】
図5に示すように、各端子12a,12b,12e,12fは、過電圧印加防止用のチップ抵抗R1,R2,R5,R6を介して、アースに接続されている。これは、外界の電磁波による交番電界によって導線に生じる起電力が、静電アクチュエータ14a,14bに印加されないように設けられたものである。
【0031】
電源回路の配線長さや周囲の環境によっては、上述の交番電界による周期的に変化する起電力がアーム13a,13bの開閉に必要な電圧を大きく越えてしまう可能性がある。そのような過大な起電力が静電アクチュエータ14a,14bに印加されると、アーム13a,13bの先端が過度に振動し、互いに接触して破損をもたらしたり、ナノピンセット10の内部で絶縁破壊を引き起こしたりするおそれがある。上記チップ抵抗R1,R2,R5,R6は、このような過電圧が印加されるのを防止するため設けられている。
【0032】
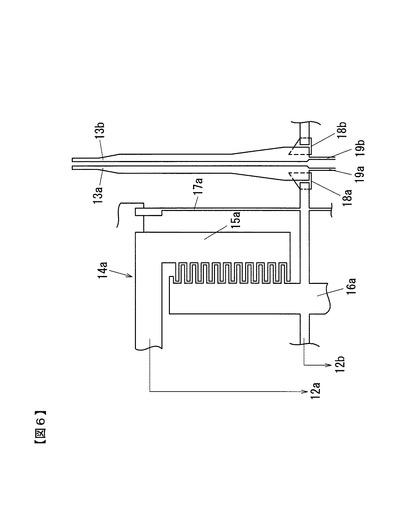
図6は、アーム13a,13bと静電アクチュエータ14aの一部を示す拡大図である。固定電極15aと可動電極16aとの間に電圧を印加すると、可動電極16aが固定電極15aに対して図示右方向に動くことにより、アーム13aが図示右方向に駆動される。電圧印加を解除すると、アーム13aは元の位置、つまり図6に示す位置へ復帰する。右側については動作が反転するだけであり、同様に、可動電極16bが固定電極15bに対して図示左方向に動くことにより、アーム13bが左方向に駆動される。その結果、アーム13aとアーム13bとの間に微小物体を把持したり、微小物体の把持を解除したりすることができる。
【0033】
[動作説明]
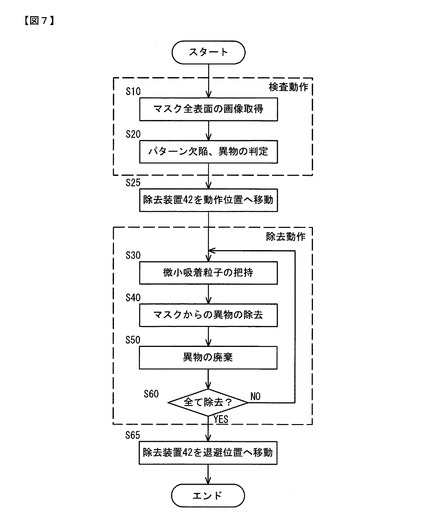
次いで、除去機構42を用いた異物除去動作について、図7のフローチャートを参照しながら説明する。検査装置1は、パターン欠陥や異物の有無を検査するとともに、検出された異物の除去を行うことができる。すなわち、検査装置1は、異物除去動作に先立って、マスク116のパターン欠陥や異物を検査するための検査動作を行う。検査動作を行う場合には、除去機構42は上述した退避位置に待機している。
【0034】
図7は検査および異物除去動作の手順を示すフローチャートであり、ステップS10では、検出ヘッド113が設けられたヘッド用直角ステージ122を所定の上下位置(Z位置)に停止させ、マスクホルダ117を一方向(X方向)に一定速度で移動させる。その一定速度で移動している間に、光学素子412による撮像画像を一定時間間隔で取得する。その後、検出ヘッド113を光学素子412の視野分だけ上下方向(Z方向)に移動した後、マスクホルダ117を一方向に一定速度で移動させ画像を取得する。このような動作を繰り返し行うことで、マスク116の全エリアの画像を取得する。
【0035】
取得された画像データは、制御装置200の画像情報処理部210へ送られる。画像情報処理部210では、画像データに基づいてマスク116のパターン欠陥や異常および異物の有無を判定する(ステップS20)。その判定結果は、パターン欠陥や異物の位置情報とともに制御装置200の記憶部220に保持される。
【0036】
ステップS20における異物判定が終了したならば、ステップS25において、除去機構42を動作位置に移動する。本実施の形態の検査装置では、マニピュレータとして機能するナノピンセット10で微小吸着粒子を把持し、その微小吸着粒子を基板表面に押し付けて異物を微小吸着粒子に付着させ、異物が付着した微小吸着粒子ごと廃棄することに特徴がある。
【0037】
検査動作においては、除去機構42は図8(a)に示すような退避位置となっているが、異物除去動作においては、図8(b)に示すように旋回駆動部423を駆動して除去機構42を動作位置に移動させる。その結果、ナノピンセット10のアーム13a,13bが、図8(c)に示すようにレンズ視野内に観察されるようになる。
【0038】
ステップS30では、ナノピンセット10による微小吸着粒子の把持動作を行う。ここで使用する微小吸着粒子は、自己粘着力のある樹脂で形成された粘着性粒子である。自己粘着力のある樹脂としては、例えば、アクリル酸エステルやポリウレタンを主構成とするもが考えられるが、特に、粘着状態を長時間維持しつつ、かつ、相手ヘの転移性が押さえられている樹脂が好ましい。
【0039】
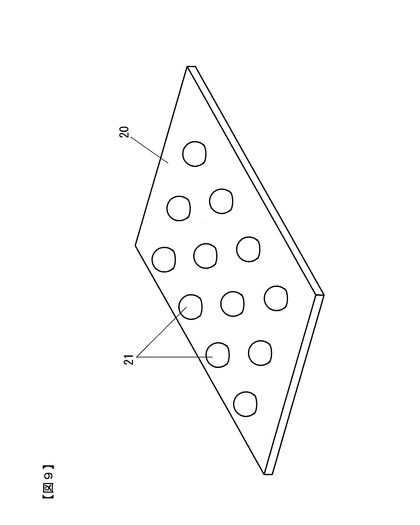
図9は、剥離シート20上に設けられた微小吸着粒子21を示す図である。微小吸着粒子21は1mmから0.01mmの球形や円盤状のように立方体状に成形した状態で、剥離シート20上に分離可能な状態で保持されている。剥離シート20は撥水性の部材(例えばフッ素樹脂)で形成され、この剥離シート20上に、上述したような自己粘着力を有する樹脂を霧状に分布させることで複数の微小吸着粒子21が形成される。
【0040】
また、次のような方法でも微小吸着粒子を製作することができる。すなわち、剥離シート上に自己粘着力を有する樹脂の層を形成した後、その樹脂層をマス目状に切断し、剥離シートを引き延ばすようにする。その結果、マス目状の樹脂層は各々分離し、立方体形状の微小吸着粒子が剥離シート上に形成される。
【0041】
異物除去時の粘着物質のマスク116への転移は新たな汚染を発生するので、微小吸着粒子21の粘着の度合いは、十分に吟味することが必要とされる。なお、図9では微小吸着粒子21の大きさが揃っているように記載されているが、実際には種々の大きさの微小吸着粒子21が剥離シート20上に設けられている。
【0042】
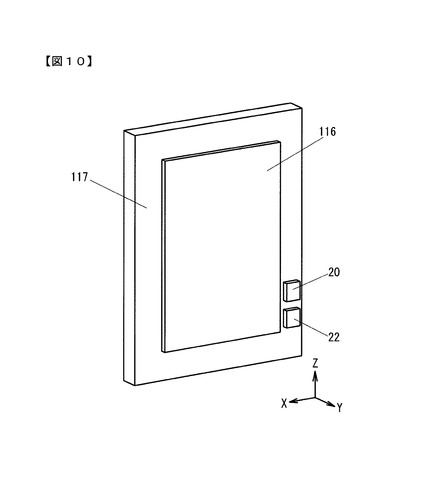
剥離シート20の大きさは、例えば、数十mm角の大きさとされ、図10に示すように、マスク検査装置1のマスクホルダ117に真空吸着等を利用して着脱可能に装着される。剥離シート20に隣接した位置には、平板状の粘着部材22が装着されている。なお、剥離シート20および粘着部材22の表面の高さ(すなわち、フォーカス方向高さ)は、異物除去動作の作業性を考慮すると、検査対象であるマスク116の表面と同じ高さに設定されるのが好ましい。
【0043】
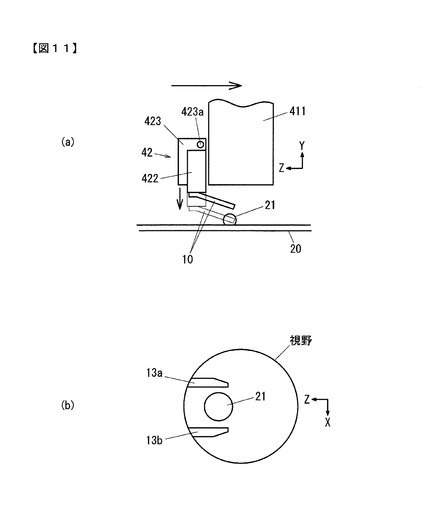
ステップS30の把持動作においては、図1に示した水平方向駆動機構124を駆動してマスクホルダ117をX軸方向に移動するとともに、鉛直方向駆動機構123を駆動して検出用直角ステージ122をZ軸方向に移動することにより、検出ヘッド113をマスクホルダ117に設けられた剥離シート20の位置へ移動し、図11(a)に示すようにナノピンセット10のアーム13a,13bが微小吸着粒子21の上方となる位置に停止させる。そして、レンズ411のフォーカスを剥離シート20上の微少吸着粒子21に合わせる。
【0044】
図11(b)は、アーム13a,13bを微小吸着粒子21の上方に位置決めしたときのレンズ視野内の状況を示す図であり、このような画像が光学素子412により撮像され、制御装置200の表示装置230に表示される。なお、図11(b)に示す例では、アーム13a,13bの先端が視野中心よりも左側にずれた位置となっているが、アーム先端が視野中心となるように、アーム13a,13bをレンズ411の直下に進入させるようにしても良い。
【0045】
なお、表示装置230に表示された微小吸着粒子21およびアーム13a,13bを確認しながら操作部240を操作して、すなわちマニュアル操作によりアーム13a,13bの位置を微調整しても良い。その後、Y方向駆動部422をY軸マイナス方向に微小駆動して、アーム13a,13bが微小吸着粒子21の側方位置となるまで剥離シート20に近づける。
【0046】
その後、アーム13aを閉じる方向に駆動してアーム13a,13bにより微小吸着粒子21を把持し、Y方向駆動部422をY軸プラス方向に駆動して把持した微小吸着粒子21を剥離シート20から引き離す。微小吸着粒子21へのアーム13a,13bの接近から微小吸着粒子21への把持および分離までの一連の動作は、光学素子412により撮像される。そのため、各動作を表示装置230により確認することができ、状況に応じてオペレータがマニュアル操作により微調整するようにしても良い。その結果、アーム13a,13bによる微小吸着粒子21の保持を確実に行うことができる。
【0047】
なお、ここで保持する微少吸着粒子21の大きさは、除去しようとする異物の大きさに比べ直径で5倍から50倍であることが好ましい。この大きさは作業性と顕微鏡内での視認性から最適な大きさである。
【0048】
図7のステップS30における微小吸着粒子21の把持動作が終了したならば、ステップS40に進んで異物を除去する処理を行う。まず、アーム13a,13bに保持された微小吸着粒子21にフォーカスを合わせたままの状態で、検出部41および除去機構42が搭載されたベース40(図3参照)を剥離シート20から遠ざかる方向(Y軸プラス方向)に所定量移動させる。そのため、引き続き行われる移動の間、アーム13a,13bに保持された微小吸着粒子21を表示装置230により確認することができる。
【0049】
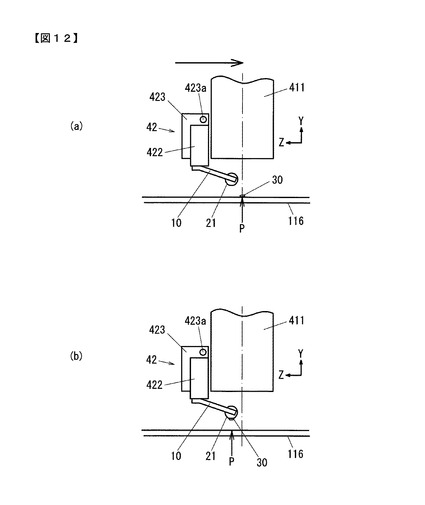
次に、微小吸着粒子21をアーム13a,13bで保持した状態のまま、鉛直方向駆動機構123および水平方向駆動機構124を駆動して検出ヘッド113をX方向およびZ方向に2次元移動し、図12(a)に示すように検出ヘッド113のレンズ411を第1番目の異物30の上方に位置決めする。なお、図1の記憶部220に記憶されている複数の異物情報には順に番号が付されていて、異物除去動作時には、それらの異物情報が番号順に呼び出される。
【0050】
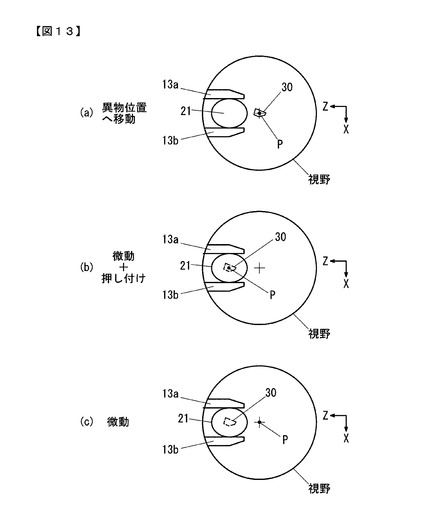
その後、Y方向駆動部422を駆動して、ナノピンセット10を数十μmほどレンズ411に近づける。このように、レンズ411のフォーカス位置に何もない状態にした上で、レンズ411のフォーカスをマスク116上の異物30に合わせる。その結果、図13(a)に示すような撮像画像が表示装置230に表示される。図13(a)において点Pは異物30の位置を表しており、プラスマークで示す視野中心に捉えられている。
【0051】
図12に示す状態からヘッド用直角ステージ122をZ軸マイナス方向へ微小移動させ、図13(b)に示すように、アーム13a,13bに保持された微小吸着粒子21を異物30の上方へ移動させる。その後、Y方向駆動部422を駆動してアーム13a,13をマスク116方向へ移動させ、微小吸着粒子21をマスク116の異物30が存在する領域に押し付けた後、Y方向駆動部422を元の位置へ駆動する。その結果、図12(b)に示すように異物30は粘着力により微小吸着粒子21に付着し、マスク116の表面から除去される。
【0052】
その後、異物30が除去されたことを確認するために、異物位置Pが視野中心に位置するようにヘッド用直角ステージ122をZ軸プラス方向へ微小移動させる。その結果、図13(c)に示すような撮像画像が表示装置230に表示され、位置Pに異物30が無ければ、異物30が微小吸着粒子21に付着してマスク116の表面から除去されたと判断できる。図13(b)から分かるように、異物30が微小吸着粒子21に付着しているか否かは撮像画像からは判断できないので、図13(c)の工程を設けることにより、異物30が除去されたか否かを確実に確認することができる。
【0053】
ステップS40における異物除去処理が終了したならば、ステップS50へ進んで異物30を廃棄する処理を行う。まず、アーム13a,13bに把持された微小吸着粒子21にフォーカスを合わせ、その状態を維持したままで検出ヘッド113をX方向およびZ方向に2次元移動し、検出ヘッド113を図10に示す粘着部材22の上方に位置決めする。なお、この位置決めする位置は、廃棄の順番に応じて予め設定されている。
【0054】
位置決め終了後、レンズ411のフォーカスを粘着部材22の表面に合わせた後、ベース40またはY方向駆動部422を粘着部材方向(Y軸マイナス方向)に駆動して、アーム13a,13bに把持された微小吸着粒子21を粘着部材22に接触させる。その後、アーム13a,13bを開いた状態にしてY軸マイナス方向に移動すると、微小吸着粒子21および粘着部材22の両方の粘着力により、異物30が付着した微小吸着粒子21は粘着部材22上に取り残されるように移動する。このように、本実施の形態では、異物30が付着している微小吸着粒子21ごと粘着部材22上に廃棄する。
【0055】
粘着部材22には、市販品の「αGEL(アルファゲル)」(登録商標)のように粘着性を有して、ナノピンセットへの転移が無く、汚染しないものが選ばれる。微小吸着粒子21よりも粘着力の大きな粘着物質が用いられ、微小吸着粒子21のナノピンセット10から粘着部材22への移動が確実に行われるようにする。また、微小吸着粒子21を粘着部材22へ付着させた後に、アーム13a,13bの先端部分の粘着部材22に押し付けて、アーム13a,13bをクリーニングするようにしても良い。粘着部材22は、微小吸着粒子21が設けられた剥離シート20と同様に数十mm角程度のシート状に形成されていて、マスク116と同じ表面高さに保持されている。
【0056】
ステップS50における廃棄処理が終了したならば、ステップS60へ進んで、記憶部220に記憶されている全ての異物情報に関して、異物除去処理が完了したか否かを判定する。完了していない場合にはステップS30へ戻り、ステップS50からステップS60までの除去動作を繰り返す。このような除去動作によりマスク116上の全ての異物が除去されたならば、ステップS65において除去機構42を退避位置に戻し、一連の動作を終了する。
【0057】
上述したように、本実施の形態では、マスクホルダ117に対して、ナノピンセット10を備えた除去機構42と光学素子412を備えたレンズ411とが一体に相対移動する用に構成されている。そして、マスク116を光学素子412により撮像して、欠陥や異物の有無を検査し、その検査結果に基づいて異物の除去を行う。すなわち、剥離シート20がマスクホルダ117に保持され、その剥離シート20上に付着している複数の微小吸着粒子21のいずれか一つをナノピンセット10により保持して剥離シート20から離脱させ、その微小吸着粒子21をマスク116上の異物30に押し付けて、異物30を微小吸着粒子21に付着させるようにしている。そして、異物30が付着した微小吸着粒子21を粘着部材22に押し付けて付着させることで、微小吸着粒子21を粘着部材22に廃棄する。
【0058】
従来、マスクやウエハ基板等に付着した微小異物(パーティクル)を機械的に除去する方法としては、比較的確実なものとしてナノピンセットにより微小異物を把持して廃棄する方法が提案されている。しかしながら、充分な高さを有する微小異物であればナノピンセットで把持することはできるが、薄い平板状異物の場合にはナノピンセットで把持するのは非常に困難である。例えば、アームの高さが5μm程度の場合、厚さ1μmの微小異物は把持することができない。また、把持の際に微小異物が細かく砕けてしまう場合もあり、それらを把持して除去するのはさらに困難である。また、静電気が帯電したりしていると、除去困難性がさらに高まる。
【0059】
一方、本実施の形態では、上述したように、粘着性の微小吸着粒子21をマスク116の表面に押し付けて、異物30を微小吸着粒子21に付着させて除去するようにした。そのため、微小な異物や平板状異物であっても容易に除去することができるとともに、異物表面の広範な領域が微小吸着粒子21に付着するため、静電気の影響で剥がれにくい異物であっても除去することができる。
【0060】
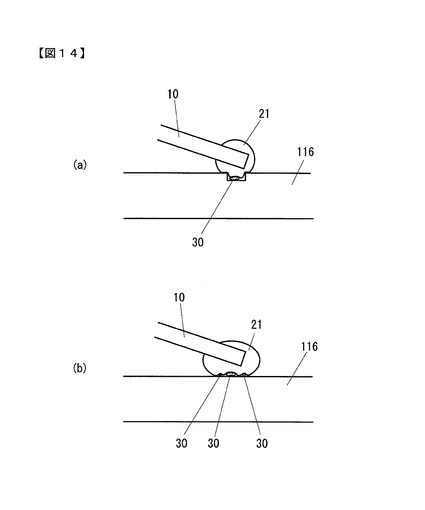
また、図14(a)に示すようにマスク116の表面が凹凸形状であって、その凹部に異物30が存在する場合、従来のようにナノピンセット10で直接把持するのは難しいが、微小吸着粒子21を用いる場合には、微小吸着粒子21が変形して凹部内に容易に入り込むことができるため、異物30を微小吸着粒子21に付着させて簡単に除去することができる。
【0061】
さらに、図14(b)に示すように、複数の異物30が固まって分布している場合であっても、一つの微小吸着粒子21でいっぺんに除去することができる。剥離シート20には種々の大きさの微小吸着粒子21を設けることができるので、異物30の大きさや分布範囲に応じて微小吸着粒子21を選択すれば良い。
【0062】
また、剥離シート20に複数の微小吸着粒子21を設けているので、異物除去の度に新しい微小吸着粒子21をナノピンセットで把持して使用することができる。同じ微小吸着粒子21を複数回の異物除去に用いると、微小吸着粒子21に付着させた異物が再び基板に付着するおそれがあるが、上述したように異物除去の度に微小吸着粒子21を新しい物ものに交換することで、そのような再付着を確実に防止することができる。
【0063】
さらに、異物をマスク116から除去する際の除去動作、および、異物を粘着部材22へ移送する際の移送動作を光学素子412により撮像することにより、それぞれの動作が確実に行われていることを確認することができる。また、異物をマスク116から除去した後に、マスク116上の異物があった領域を光学素子412により撮像することで、異物が除去されたことを確認することができ、確実な異物除去を行うことができる。
【0064】
なお、異物除去に先立って、基板上の異物に対してイオナイザー等で静電気を除去した方が良い場合には、マスク116全体もしくは局部的に除電を行うようにしても良い。また、上述した実施形態では、ナノピンセット10の移動機構としてフォーカス方向の微動機構であるY方向駆動部422のみを設けたが、場合によってはX軸方向やZ軸方向の微動機構をさらに設けても良い。それらを備えることで、微小吸着粒子21の把持作業や異物除去作業の作業性向上を図ることが可能である。
【0065】
また、微小吸着粒子21が設けられた剥離シート20および粘着部材22は、作業開始時にマスクホルダ117にセットされ、それぞれの粘着性能が劣化した時点で廃棄、交換するのが好ましい。
【0066】
なお、上述した実施の形態では、微小吸着粒子21を保持するマニピュレータとして、MEMS技術により製作されたナノピンセットを用いて微小吸着粒子21を把持するようにしたが、針状部材を用いて微小吸着粒子21を突き刺すように保持するようにしても良い。
【0067】
また、上述した実施の形態では、検査対象基板における欠陥や異物の有無を検査する基板検査装置を例に、除去機構42による異物除去を説明したが、基板検査装置とは別に異物除去装置を設け、基板検査装置の検査結果(異物の位置情報)を異物除去装置に取り込み、検査結果に基づいて異物を除去するようにしても良い。例えば、異物除去装置は、図1に示すマスク検査装置1から欠陥や異物を検査する機能を省略し、異物の位置情報を他のマスク検査装置から取り込んで記憶部220に記憶させ、その位置情報に基づいて異物を除去する。
【0068】
すなわち、検査対象基板であるマスク116、複数の粘着性粒子が離脱可能に設けられた剥離シート20、および粘着部材22が装着されるマスクホルダ117と、マスクホルダ117に対してマニピュレータ(ナノピンセット10)と検出部41とを一体に相対移動させる鉛直方向駆動機構123および水平方向駆動機構124とを備え、検出部41によりマスク116を撮像して、マスク116上の異物を表示装置230に表示して観察する。そして、制御装置200は、剥離シート20に設けられた複数の粘着性粒子のいずれか一つをナノピンセット10で保持して剥離シート20から離脱させ、観察結果に基づいて、ナノピンセット10に保持した粘着性粒子に異物を付着させてマスク116から除去し、粘着性粒子をナノピンセット10から粘着部材22へ移送するようにナノピンセット10を制御する。
【0069】
上述した各実施形態はそれぞれ単独に、あるいは組み合わせて用いても良い。それぞれの実施形態での効果を単独あるいは相乗して奏することができるからである。また、本発明の特徴を損なわない限り、本発明は上記実施の形態に何ら限定されるものではない。
【符号の説明】
【0070】
1:マスク検査装置、10:ナノピンセット、13a,13b:アーム、20:剥離シート、21:微小吸着粒子、22:粘着部材、41:検出部、42:除去機構、113:検出ヘッド、116:マスク、117:マスクホルダ、122:ヘッド用直角ステージ、123:鉛直方向駆動機構、124:水平方向駆動機構、200:制御装置、210:画像情報処理部、220:記憶部、230:表示装置、240:操作部、412:光学素子、422:Y方向駆動部、423:旋回駆動部
【技術分野】
【0001】
本発明は、フォトマスク、液晶パネル、ウエハ等の基板に付着した異物を除去することができる基板検査装置、異物除去装置および異物除去方法に関する。
【背景技術】
【0002】
液晶パネル等の製造に用いられるマスクでは、マスクパターンの欠陥や異物の有無を検査する必要がある。マスク検査装置による検査で基準以上のパーティクルが検出された場合には、そのパーティクルをマスク基板から除去しなければならない。これらのパーティクルとしては、一般的に、油分や洗浄剤残渣等で固着したパーティクルや、静電気で吸着されたパーティクルがある。
【0003】
パーティクルを除去する方法としては、以下のような方法が知られている。
(1)洗浄により、溶剤と超音波等の作用により除去する方法。
(2)静電気による吸着物に対しては、除電を行ってパーティクルとマスクとの吸着力を弱めた後に、エアーブローによりそれらを吹き飛ばすと同時にバキュームで吸引して除去する方法。
(3)ナノピンセット等のマニピュレータでパーティクルを掴み、別途用意した粘着物上に付着させて廃棄する方法(例えば、特許文献1参照)。
(4)検査対象物の凹んだところに入ったパーティクルを、AFMカンチレバーなどの針状突起を持つ弾性体を用いて掻き出す方法(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−311521号公報
【特許文献2】特開2008−26671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、(1)に記載の方法の場合、固着したものと静電気によるものとの両方に有効ではあるが、基準ぎりぎりのごく少数のパーティクルの除去では、効率が悪く、改善が望まれている。(2)の方法では、マスクに固着したものは除去できず、また、10μm以下の微小なパーティクルの除電はとても難しく、静電力による吸着力を完全になくすことはできず、エアーブローで取り去ることができない場合がある。また、バキュームによる吸引を併用するとはいえ、除去したパーティクルがマスクに再付着するおそれがある。
【0006】
また、(3)のナノピンセットを用いる場合、ナノピンセットの把持部の厚さ(数μm〜数十μm)に対してパーティクルの厚さが充分大きければ、固着、吸着にかかわらずパーティクルを除去できるが、把持部の厚さに対して非常に薄い異物や大きさが小さすぎるパーティクルの場合には把持が難しく、特に、静電力等の吸着力が残っている場合には困難となる。(4)のカンチレバーを用いる場合には、搬送はカンチレバー先端とパーティクルとの静電力に頼るため、確実性に欠ける。
【課題を解決するための手段】
【0007】
請求項1の発明による基板検査装置は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、平板に設けられた複数の粘着性粒子のいずれか一つをマニピュレータで保持して平板から離脱させ、検査手段の検査結果に基づいて、マニピュレータに保持した粘着性粒子に異物を付着させて検査対象基板から除去し、該粘着性粒子をマニピュレータから粘着部材へ移送するようにマニピュレータを制御する制御手段と、を備えたことを特徴とする。
請求項2の発明による基板検査装置は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、保持指令により、マニピュレータを平板へ移動し、複数の粘着性粒子のいずれか一つをマニピュレータで保持して平板から離脱させる保持制御手段と、除去指令により、粘着性粒子を保持したマニピュレータを検査手段の検査結果に基づいて異物の位置へ移動し、異物を粘着性粒子に付着させて検査対象基板から除去する除去制御手段と、廃棄指令により、異物が付着した粘着性粒子を保持したマニピュレータを粘着部材へ移動し、該粘着性粒子を粘着部材に付着させてマニピュレータから粘着部材へ移送する廃棄制御手段と、を備えたことを特徴とする。
請求項3の発明は、請求項1または2に記載の基板検査装置において、異物を検査対象基板から除去した後に、検査対象基板上の異物が除去された領域を撮像装置により撮像して表示手段に表示することを特徴とする。
請求項4の発明は、請求項1または2に記載の基板検査装置において、撮像装置により撮像した画像を表示する表示手段を備え、異物を検査対象基板から除去する際の除去動作、および、異物を粘着部材へ移送する際の移送動作を、撮像装置により撮像して表示手段に表示することを特徴とする。
請求項5の発明は、請求項4に記載の基板検査装置において、異物を検査対象基板から除去した後に、検査対象基板上の異物が除去された領域を撮像装置により撮像して表示手段に表示するようにしたものである。
請求項6の発明は、請求項1〜5のいずれか一項に記載の基板検査装置において、マニピュレータはMEMS技術で形成された微小ピンセットであり、微小ピンセットにより粘着部材を把持するようにしたものである。
請求項7の発明による異物除去装置は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により検査対象基板を撮像して、該検査対象基板上の異物を観察する観察手段と、平板に設けられた複数の粘着性粒子のいずれか一つをマニピュレータで保持して平板から離脱させ、観察手段の観察結果に基づいて、マニピュレータに保持した粘着性粒子に異物を付着させて検査対象基板から除去し、該粘着性粒子をマニピュレータから粘着部材へ移送するようにマニピュレータを制御する制御手段と、を備えたことを特徴とする。
請求項8の発明による異物除去方法は、検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、を備える基板検査装置における異物除去方法であって、複数の粘着性粒子のいずれか一つをマニピュレータにより保持して平板から離脱させる第1の工程と、異物に関する検査結果に基づいて、マニピュレータで保持した粘着性粒子に検査対象基板上の異物を付着させる第2の工程と、異物が付着した粘着性粒子を粘着部材に押し付けて付着させることにより、粘着性粒子をマニピュレータから粘着部材へ移送する第3の工程と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、検査対象基板上の異物を確実に除去することができる。
【図面の簡単な説明】
【0009】
【図1】マスク検査装置の概略構成を示す斜視図である。
【図2】ヘッド用直角ステージ122の斜視図である。
【図3】検出ヘッド113の詳細を示す図である。
【図4】ナノピンセット10の平面図である。
【図5】ホルダ130に装着されたナノピンセット10を示す図である。
【図6】アーム13a,13bと静電アクチュエータ14aの一部を示す拡大図である。
【図7】検査および異物除去動作の手順を示すフローチャートである。
【図8】検査動作を説明する図である。
【図9】微小吸着粒子21が形成された剥離シート20を示す図である。
【図10】マスク116、剥離シート20および粘着部材22が装着されたマスクホルダ117を示す図である。
【図11】微少吸着粒子21の把持動作を説明する図である。
【図12】異物除去動作を説明する図である。
【図13】除去確認動作を説明する図である。
【図14】異物除去動作における微少吸着粒子21への異物30の付着を説明する図である。
【発明を実施するための形態】
【0010】
以下、図を参照して本発明を実施するための形態について説明する。図1は本発明による基板検査装置の一実施の形態を示したものであり、マスク検査装置の概略構成を示す斜視図である(例えば、特許第3753108号、図1を参照)。なお、本実施形態ではマスク検査装置を例に説明するが、本発明は、液晶パネル、ウエハ等の検査装置にも同様に適用することができる。
【0011】
マスク検査装置1は、装置本体100と制御装置200とで構成される。装置本体100は、角柱111、定盤112、検出ヘッド113、バランスウェイト(カウンターウェイト)114、ワイヤー115、マスクホルダ117、鉛直方向駆動機構123、エアパッド121、ヘッド用直角ステージ122、モーターステージ118、水平方向移動機構124を備えている。
【0012】
定盤112の上には直方体の角柱111が鉛直に取り付けられており、その横に設けられた水平方向移動機構124にはマスクホルダ117が鉛直に設けられている。角柱111は加工の容易さおよび平面度の観点から、例えば御影石が用いられる。もちろん、金属やセラミックなどの御影石以外の材質でもよい。マスクホルダ117には、検査対象基板であるマスク116が取り付けられるようになっている。なお、マスク116とマスクホルダ117の取り付け角度は、マスク116の上下の辺が水平に維持されるように調整できる構成となっている。検査時には、マスク116が装着されたマスクホルダ117を、水平方向移動機構124によりX方向に移動させる。水平方向移動機構124はレール、リニアモーター等により構成される。
【0013】
角柱111の基準面である側面119,120には、ヘッド用直角ステージ122が設けられている。ヘッド用直角ステージ122の各側面119,120と対向する面には、エアパッド121がそれぞれ取り付けられている。ヘッド用直角ステージ122上には、検出ヘッド113およびモーターステージ118が装着されている。ヘッド用直角ステージ122の上部にはワイヤー115が取り付けられ、滑車を通じたその先にはバランスウェイト114が設けられている。バランスウェイト114は、検出ヘッド113等が設けられたヘッド用直角ステージ122と釣り合いが取れるように設定されている。ワイヤー115は、検出ヘッド113やヘッド用直角ステージ122等からなる移動部の重心位置に設けられていることが望ましい。
【0014】
ヘッド用直角ステージ122は、モーターステージ118とラックアンドピニオン等からなる鉛直方向駆動機構123によって上下に移動する。この上下移動の制御は制御装置200により行われ、検出ヘッド113をマスク116の検査位置へ自由に移動させることができる。また装置内にはクリーンエアがダウンフローしておりパーティクルの発生を抑制している。
【0015】
検査を行う場合には、検出ヘッド113が設けられたヘッド用直角ステージ122を所定の上下位置に停止させ、水平方向移動機構124によりマスクホルダ117をX方向に一定速度で移動させて、マスク116を検出ヘッド113の前を通過させる。その間に、CCDカメラにより画像を一定時間間隔で取得する。この取得された画像データは制御装置200の画像情報処理部210へ送られ、画像情報に基づいてマスク116の欠陥や異常およびゴミの有無を検査する。
【0016】
所定上下位置における画像取得が終了すると、ヘッド用直角ステージ122を鉛直方向に一定距離移動させた後、再びX方向にマスク116を移動させてCCDカメラによる画像取得を行う。このような動作を繰り返し行うことにより、マスク116の全面の検査をすることができる。この鉛直方向の移動ステップとマスク水平方向の移動速度はCCDカメラの視野範囲及び性能等により調整される。
【0017】
図2は、ヘッド用直角ステージ122の斜視図である。なお、図2ではモーターステージ118の図示は省略した。ヘッド用直角ステージ122には、角柱111の側面119,120と対向する部分に、軸受けの機能を有するエアパッド121がそれぞれ取り付けられている。エアパッド121の前記側面119,120と対向する面には、エア噴出部133と吸引部134とが設けられている。
【0018】
エアパッド121には、加工が容易であることからアルミナ等のセラミックが用いられる。エア噴出部133には空気を噴出する噴出孔が多数設けられている。吸引部134は、エア噴出部133を囲むように形成された溝から成る。図2に示す例では、エア噴出部133は4つの領域に分割されており、吸引部134は、それぞれの領域を囲むように形成されている。なお、エアパッド121の製造方法および内部構成については、例えば特開2002−106562号公報に詳細に記載されている。
【0019】
エアパッド121の上面には、エア供給口135とエア排気口136とが設けられている。エアパッド121の内部において、エア供給口135はエア噴出部133と連通しており、エア排気口136は吸引部134と連通している。エア供給口135には不図示の配管を介して加圧された空気が供給され、供給された空気はエア噴出部133から噴出される。一方、エア排気口136には不図示の配管が接続され、真空ポンプ等により真空排気が行われる。その結果、吸引部134から空気が吸引される。これらの配管はエアパッド121毎に別の配管を設けてもよいし、1系統の配管を途中で分岐しても良い。
【0020】
エアパッド121と各側面119,120との間隔は、エア噴出部133から噴出される空気による反発力と吸引部134から吸引される空気による吸引力の釣り合う所で一定になる。従ってエアパッド121は、角柱111に対して微小隙間を有して浮上することになる。外力や振動によってその隙間が狭くなった場合は、反発力の方が吸引力より強くなりもとの微小隙間に戻る。逆に、外力や振動によってその隙間が広くなった場合には、吸引力の方が反発力より強くなるためもとの微小隙間に戻る。そのため、外力や振動等による外乱があった場合でも、微小隙間の間隔は一定に保たれる。
【0021】
また、ヘッド用直角ステージ122には、X軸に垂直な側面119に対向するエアパッド121と、Y軸に垂直な側面120に対向するエアパッド121とが設けられているので、直交する2つの側面119,120との間の間隔がそれぞれ一定に保持されるので、直進性(真直度、ヨーイング、ピッチング、ローリング)の劣化を抑制することができる。さらに、接触部がないために精度劣化要因が取り除かれ、経時変化も防止できる。
【0022】
図3は、検出ヘッド113の詳細を示す図である。検出ヘッド113はY軸方向に移動可能なベース40を備えており、ベース40上には、パターン欠陥や異物を検出するための検出部41と、マスク116の表面に付着した異物を除去するための除去機構42とが設けられている。検出部41には顕微鏡(例えばコンフォーカル顕微鏡)が用いられ、レンズ411と光学素子412(例えば、CCDカメラ)とを備えている。検査対象であるマスク116は、検出部41に対してY軸マイナス方向に配置されており、図3のY軸方向が検出部41のフォーカス方向である。
【0023】
除去機構42は、マニピュレータとして機能する微小なピンセット(以下では、ナノピンセットと称する)10と、Y方向駆動部422と、旋回駆動部423とを備えている。詳細は後述するが、ナノピンセット10はMEMS技術等を利用して製作され、開閉可能な一対のアーム13a,13bを備えている。ナノピンセット10は、Y方向駆動部422によってY方向(検出部41のフォーカス方向)に移動することができる。Y方向駆動部422としては、例えば、圧電アクチュエータなどが用いられ、ミクロンオーダーでの微動移動が可能である。
【0024】
旋回駆動部423は、ナノピンセット10の顕微鏡視野内への挿脱を行うアクチュエータであり、除去機構42全体を軸423aを中心として回転駆動する。図3に示す状態は除去機構42の動作位置であって、ナノピンセット10はレンズ411の直下に挿入されている。異物除去動作を行わない非動作時には、除去機構42全体を反時計回りに回転して退避位置へと移動する。
【0025】
図4〜6は、ナノピンセット10を説明する図である。図4はナノピンセット10の平面図である。ナノピンセット10は、SOI(Silicon on Insulator)ウエハから一体で作製される。SOIウエハは、2枚のSi単結晶板の一方にSiO2層を形成し、SiO2層を介して貼り合わせたものである。
【0026】
図4に示すように、ナノピンセット10は、一対のアーム13a,13b、一対の静電アクチュエータ14a,14b、一対の支持部17a,17b、一対の連結部18a,18と、一対のアーム支持部19a,19b、および台座11を備えている。静電アクチュエータ14aには、固定電極15aおよび可動電極16aが設けられ、静電アクチュエータ14bには固定電極15bおよび可動電極16bが設けられている。台座11は、図5に示すホルダ130に接合される。
【0027】
左右対称形状となっているアーム13aに関する静電アクチュエータ14aとアーム13bに関する静電アクチュエータ14bとは、同一構造を有している。固定電極15aおよび可動電極16aは、いずれも櫛歯形状を有しており、互いの櫛歯同士が隙間を介して噛み合うようなかたちで対向配置されている。固定電極15aは台座11上に形成されている。一方、可動電極16aは、細いビーム状の支持部17aによって台座11に弾性的に固定されている。固定電極15bおよび可動電極16bも同様の構造となっている。
【0028】
アーム13a,13bは、それぞれ細いビーム状のアーム支持部19a,19bを介して台座11に弾性的に固定されている。アーム13aと可動電極16aとは連結部18aによって連結され、アーム13bと可動電極16bとは連結部18bによって連結されている。
【0029】
端子12a,12b,12e,12f,12gは電圧を印加するための端子であり、左側のアーム13aに関して、端子12aは固定電極15aに接続され、端子12bは可動電極16aに接続されている。一方、右側のアーム13bに関しては、端子12eは可動電極16bに接続され、端子12fは固定電極15bに接続されている。端子12gは、台座11が浮遊電極となるのを防止するためのアース端子である。
【0030】
図5に示すように、各端子12a,12b,12e,12fは、過電圧印加防止用のチップ抵抗R1,R2,R5,R6を介して、アースに接続されている。これは、外界の電磁波による交番電界によって導線に生じる起電力が、静電アクチュエータ14a,14bに印加されないように設けられたものである。
【0031】
電源回路の配線長さや周囲の環境によっては、上述の交番電界による周期的に変化する起電力がアーム13a,13bの開閉に必要な電圧を大きく越えてしまう可能性がある。そのような過大な起電力が静電アクチュエータ14a,14bに印加されると、アーム13a,13bの先端が過度に振動し、互いに接触して破損をもたらしたり、ナノピンセット10の内部で絶縁破壊を引き起こしたりするおそれがある。上記チップ抵抗R1,R2,R5,R6は、このような過電圧が印加されるのを防止するため設けられている。
【0032】
図6は、アーム13a,13bと静電アクチュエータ14aの一部を示す拡大図である。固定電極15aと可動電極16aとの間に電圧を印加すると、可動電極16aが固定電極15aに対して図示右方向に動くことにより、アーム13aが図示右方向に駆動される。電圧印加を解除すると、アーム13aは元の位置、つまり図6に示す位置へ復帰する。右側については動作が反転するだけであり、同様に、可動電極16bが固定電極15bに対して図示左方向に動くことにより、アーム13bが左方向に駆動される。その結果、アーム13aとアーム13bとの間に微小物体を把持したり、微小物体の把持を解除したりすることができる。
【0033】
[動作説明]
次いで、除去機構42を用いた異物除去動作について、図7のフローチャートを参照しながら説明する。検査装置1は、パターン欠陥や異物の有無を検査するとともに、検出された異物の除去を行うことができる。すなわち、検査装置1は、異物除去動作に先立って、マスク116のパターン欠陥や異物を検査するための検査動作を行う。検査動作を行う場合には、除去機構42は上述した退避位置に待機している。
【0034】
図7は検査および異物除去動作の手順を示すフローチャートであり、ステップS10では、検出ヘッド113が設けられたヘッド用直角ステージ122を所定の上下位置(Z位置)に停止させ、マスクホルダ117を一方向(X方向)に一定速度で移動させる。その一定速度で移動している間に、光学素子412による撮像画像を一定時間間隔で取得する。その後、検出ヘッド113を光学素子412の視野分だけ上下方向(Z方向)に移動した後、マスクホルダ117を一方向に一定速度で移動させ画像を取得する。このような動作を繰り返し行うことで、マスク116の全エリアの画像を取得する。
【0035】
取得された画像データは、制御装置200の画像情報処理部210へ送られる。画像情報処理部210では、画像データに基づいてマスク116のパターン欠陥や異常および異物の有無を判定する(ステップS20)。その判定結果は、パターン欠陥や異物の位置情報とともに制御装置200の記憶部220に保持される。
【0036】
ステップS20における異物判定が終了したならば、ステップS25において、除去機構42を動作位置に移動する。本実施の形態の検査装置では、マニピュレータとして機能するナノピンセット10で微小吸着粒子を把持し、その微小吸着粒子を基板表面に押し付けて異物を微小吸着粒子に付着させ、異物が付着した微小吸着粒子ごと廃棄することに特徴がある。
【0037】
検査動作においては、除去機構42は図8(a)に示すような退避位置となっているが、異物除去動作においては、図8(b)に示すように旋回駆動部423を駆動して除去機構42を動作位置に移動させる。その結果、ナノピンセット10のアーム13a,13bが、図8(c)に示すようにレンズ視野内に観察されるようになる。
【0038】
ステップS30では、ナノピンセット10による微小吸着粒子の把持動作を行う。ここで使用する微小吸着粒子は、自己粘着力のある樹脂で形成された粘着性粒子である。自己粘着力のある樹脂としては、例えば、アクリル酸エステルやポリウレタンを主構成とするもが考えられるが、特に、粘着状態を長時間維持しつつ、かつ、相手ヘの転移性が押さえられている樹脂が好ましい。
【0039】
図9は、剥離シート20上に設けられた微小吸着粒子21を示す図である。微小吸着粒子21は1mmから0.01mmの球形や円盤状のように立方体状に成形した状態で、剥離シート20上に分離可能な状態で保持されている。剥離シート20は撥水性の部材(例えばフッ素樹脂)で形成され、この剥離シート20上に、上述したような自己粘着力を有する樹脂を霧状に分布させることで複数の微小吸着粒子21が形成される。
【0040】
また、次のような方法でも微小吸着粒子を製作することができる。すなわち、剥離シート上に自己粘着力を有する樹脂の層を形成した後、その樹脂層をマス目状に切断し、剥離シートを引き延ばすようにする。その結果、マス目状の樹脂層は各々分離し、立方体形状の微小吸着粒子が剥離シート上に形成される。
【0041】
異物除去時の粘着物質のマスク116への転移は新たな汚染を発生するので、微小吸着粒子21の粘着の度合いは、十分に吟味することが必要とされる。なお、図9では微小吸着粒子21の大きさが揃っているように記載されているが、実際には種々の大きさの微小吸着粒子21が剥離シート20上に設けられている。
【0042】
剥離シート20の大きさは、例えば、数十mm角の大きさとされ、図10に示すように、マスク検査装置1のマスクホルダ117に真空吸着等を利用して着脱可能に装着される。剥離シート20に隣接した位置には、平板状の粘着部材22が装着されている。なお、剥離シート20および粘着部材22の表面の高さ(すなわち、フォーカス方向高さ)は、異物除去動作の作業性を考慮すると、検査対象であるマスク116の表面と同じ高さに設定されるのが好ましい。
【0043】
ステップS30の把持動作においては、図1に示した水平方向駆動機構124を駆動してマスクホルダ117をX軸方向に移動するとともに、鉛直方向駆動機構123を駆動して検出用直角ステージ122をZ軸方向に移動することにより、検出ヘッド113をマスクホルダ117に設けられた剥離シート20の位置へ移動し、図11(a)に示すようにナノピンセット10のアーム13a,13bが微小吸着粒子21の上方となる位置に停止させる。そして、レンズ411のフォーカスを剥離シート20上の微少吸着粒子21に合わせる。
【0044】
図11(b)は、アーム13a,13bを微小吸着粒子21の上方に位置決めしたときのレンズ視野内の状況を示す図であり、このような画像が光学素子412により撮像され、制御装置200の表示装置230に表示される。なお、図11(b)に示す例では、アーム13a,13bの先端が視野中心よりも左側にずれた位置となっているが、アーム先端が視野中心となるように、アーム13a,13bをレンズ411の直下に進入させるようにしても良い。
【0045】
なお、表示装置230に表示された微小吸着粒子21およびアーム13a,13bを確認しながら操作部240を操作して、すなわちマニュアル操作によりアーム13a,13bの位置を微調整しても良い。その後、Y方向駆動部422をY軸マイナス方向に微小駆動して、アーム13a,13bが微小吸着粒子21の側方位置となるまで剥離シート20に近づける。
【0046】
その後、アーム13aを閉じる方向に駆動してアーム13a,13bにより微小吸着粒子21を把持し、Y方向駆動部422をY軸プラス方向に駆動して把持した微小吸着粒子21を剥離シート20から引き離す。微小吸着粒子21へのアーム13a,13bの接近から微小吸着粒子21への把持および分離までの一連の動作は、光学素子412により撮像される。そのため、各動作を表示装置230により確認することができ、状況に応じてオペレータがマニュアル操作により微調整するようにしても良い。その結果、アーム13a,13bによる微小吸着粒子21の保持を確実に行うことができる。
【0047】
なお、ここで保持する微少吸着粒子21の大きさは、除去しようとする異物の大きさに比べ直径で5倍から50倍であることが好ましい。この大きさは作業性と顕微鏡内での視認性から最適な大きさである。
【0048】
図7のステップS30における微小吸着粒子21の把持動作が終了したならば、ステップS40に進んで異物を除去する処理を行う。まず、アーム13a,13bに保持された微小吸着粒子21にフォーカスを合わせたままの状態で、検出部41および除去機構42が搭載されたベース40(図3参照)を剥離シート20から遠ざかる方向(Y軸プラス方向)に所定量移動させる。そのため、引き続き行われる移動の間、アーム13a,13bに保持された微小吸着粒子21を表示装置230により確認することができる。
【0049】
次に、微小吸着粒子21をアーム13a,13bで保持した状態のまま、鉛直方向駆動機構123および水平方向駆動機構124を駆動して検出ヘッド113をX方向およびZ方向に2次元移動し、図12(a)に示すように検出ヘッド113のレンズ411を第1番目の異物30の上方に位置決めする。なお、図1の記憶部220に記憶されている複数の異物情報には順に番号が付されていて、異物除去動作時には、それらの異物情報が番号順に呼び出される。
【0050】
その後、Y方向駆動部422を駆動して、ナノピンセット10を数十μmほどレンズ411に近づける。このように、レンズ411のフォーカス位置に何もない状態にした上で、レンズ411のフォーカスをマスク116上の異物30に合わせる。その結果、図13(a)に示すような撮像画像が表示装置230に表示される。図13(a)において点Pは異物30の位置を表しており、プラスマークで示す視野中心に捉えられている。
【0051】
図12に示す状態からヘッド用直角ステージ122をZ軸マイナス方向へ微小移動させ、図13(b)に示すように、アーム13a,13bに保持された微小吸着粒子21を異物30の上方へ移動させる。その後、Y方向駆動部422を駆動してアーム13a,13をマスク116方向へ移動させ、微小吸着粒子21をマスク116の異物30が存在する領域に押し付けた後、Y方向駆動部422を元の位置へ駆動する。その結果、図12(b)に示すように異物30は粘着力により微小吸着粒子21に付着し、マスク116の表面から除去される。
【0052】
その後、異物30が除去されたことを確認するために、異物位置Pが視野中心に位置するようにヘッド用直角ステージ122をZ軸プラス方向へ微小移動させる。その結果、図13(c)に示すような撮像画像が表示装置230に表示され、位置Pに異物30が無ければ、異物30が微小吸着粒子21に付着してマスク116の表面から除去されたと判断できる。図13(b)から分かるように、異物30が微小吸着粒子21に付着しているか否かは撮像画像からは判断できないので、図13(c)の工程を設けることにより、異物30が除去されたか否かを確実に確認することができる。
【0053】
ステップS40における異物除去処理が終了したならば、ステップS50へ進んで異物30を廃棄する処理を行う。まず、アーム13a,13bに把持された微小吸着粒子21にフォーカスを合わせ、その状態を維持したままで検出ヘッド113をX方向およびZ方向に2次元移動し、検出ヘッド113を図10に示す粘着部材22の上方に位置決めする。なお、この位置決めする位置は、廃棄の順番に応じて予め設定されている。
【0054】
位置決め終了後、レンズ411のフォーカスを粘着部材22の表面に合わせた後、ベース40またはY方向駆動部422を粘着部材方向(Y軸マイナス方向)に駆動して、アーム13a,13bに把持された微小吸着粒子21を粘着部材22に接触させる。その後、アーム13a,13bを開いた状態にしてY軸マイナス方向に移動すると、微小吸着粒子21および粘着部材22の両方の粘着力により、異物30が付着した微小吸着粒子21は粘着部材22上に取り残されるように移動する。このように、本実施の形態では、異物30が付着している微小吸着粒子21ごと粘着部材22上に廃棄する。
【0055】
粘着部材22には、市販品の「αGEL(アルファゲル)」(登録商標)のように粘着性を有して、ナノピンセットへの転移が無く、汚染しないものが選ばれる。微小吸着粒子21よりも粘着力の大きな粘着物質が用いられ、微小吸着粒子21のナノピンセット10から粘着部材22への移動が確実に行われるようにする。また、微小吸着粒子21を粘着部材22へ付着させた後に、アーム13a,13bの先端部分の粘着部材22に押し付けて、アーム13a,13bをクリーニングするようにしても良い。粘着部材22は、微小吸着粒子21が設けられた剥離シート20と同様に数十mm角程度のシート状に形成されていて、マスク116と同じ表面高さに保持されている。
【0056】
ステップS50における廃棄処理が終了したならば、ステップS60へ進んで、記憶部220に記憶されている全ての異物情報に関して、異物除去処理が完了したか否かを判定する。完了していない場合にはステップS30へ戻り、ステップS50からステップS60までの除去動作を繰り返す。このような除去動作によりマスク116上の全ての異物が除去されたならば、ステップS65において除去機構42を退避位置に戻し、一連の動作を終了する。
【0057】
上述したように、本実施の形態では、マスクホルダ117に対して、ナノピンセット10を備えた除去機構42と光学素子412を備えたレンズ411とが一体に相対移動する用に構成されている。そして、マスク116を光学素子412により撮像して、欠陥や異物の有無を検査し、その検査結果に基づいて異物の除去を行う。すなわち、剥離シート20がマスクホルダ117に保持され、その剥離シート20上に付着している複数の微小吸着粒子21のいずれか一つをナノピンセット10により保持して剥離シート20から離脱させ、その微小吸着粒子21をマスク116上の異物30に押し付けて、異物30を微小吸着粒子21に付着させるようにしている。そして、異物30が付着した微小吸着粒子21を粘着部材22に押し付けて付着させることで、微小吸着粒子21を粘着部材22に廃棄する。
【0058】
従来、マスクやウエハ基板等に付着した微小異物(パーティクル)を機械的に除去する方法としては、比較的確実なものとしてナノピンセットにより微小異物を把持して廃棄する方法が提案されている。しかしながら、充分な高さを有する微小異物であればナノピンセットで把持することはできるが、薄い平板状異物の場合にはナノピンセットで把持するのは非常に困難である。例えば、アームの高さが5μm程度の場合、厚さ1μmの微小異物は把持することができない。また、把持の際に微小異物が細かく砕けてしまう場合もあり、それらを把持して除去するのはさらに困難である。また、静電気が帯電したりしていると、除去困難性がさらに高まる。
【0059】
一方、本実施の形態では、上述したように、粘着性の微小吸着粒子21をマスク116の表面に押し付けて、異物30を微小吸着粒子21に付着させて除去するようにした。そのため、微小な異物や平板状異物であっても容易に除去することができるとともに、異物表面の広範な領域が微小吸着粒子21に付着するため、静電気の影響で剥がれにくい異物であっても除去することができる。
【0060】
また、図14(a)に示すようにマスク116の表面が凹凸形状であって、その凹部に異物30が存在する場合、従来のようにナノピンセット10で直接把持するのは難しいが、微小吸着粒子21を用いる場合には、微小吸着粒子21が変形して凹部内に容易に入り込むことができるため、異物30を微小吸着粒子21に付着させて簡単に除去することができる。
【0061】
さらに、図14(b)に示すように、複数の異物30が固まって分布している場合であっても、一つの微小吸着粒子21でいっぺんに除去することができる。剥離シート20には種々の大きさの微小吸着粒子21を設けることができるので、異物30の大きさや分布範囲に応じて微小吸着粒子21を選択すれば良い。
【0062】
また、剥離シート20に複数の微小吸着粒子21を設けているので、異物除去の度に新しい微小吸着粒子21をナノピンセットで把持して使用することができる。同じ微小吸着粒子21を複数回の異物除去に用いると、微小吸着粒子21に付着させた異物が再び基板に付着するおそれがあるが、上述したように異物除去の度に微小吸着粒子21を新しい物ものに交換することで、そのような再付着を確実に防止することができる。
【0063】
さらに、異物をマスク116から除去する際の除去動作、および、異物を粘着部材22へ移送する際の移送動作を光学素子412により撮像することにより、それぞれの動作が確実に行われていることを確認することができる。また、異物をマスク116から除去した後に、マスク116上の異物があった領域を光学素子412により撮像することで、異物が除去されたことを確認することができ、確実な異物除去を行うことができる。
【0064】
なお、異物除去に先立って、基板上の異物に対してイオナイザー等で静電気を除去した方が良い場合には、マスク116全体もしくは局部的に除電を行うようにしても良い。また、上述した実施形態では、ナノピンセット10の移動機構としてフォーカス方向の微動機構であるY方向駆動部422のみを設けたが、場合によってはX軸方向やZ軸方向の微動機構をさらに設けても良い。それらを備えることで、微小吸着粒子21の把持作業や異物除去作業の作業性向上を図ることが可能である。
【0065】
また、微小吸着粒子21が設けられた剥離シート20および粘着部材22は、作業開始時にマスクホルダ117にセットされ、それぞれの粘着性能が劣化した時点で廃棄、交換するのが好ましい。
【0066】
なお、上述した実施の形態では、微小吸着粒子21を保持するマニピュレータとして、MEMS技術により製作されたナノピンセットを用いて微小吸着粒子21を把持するようにしたが、針状部材を用いて微小吸着粒子21を突き刺すように保持するようにしても良い。
【0067】
また、上述した実施の形態では、検査対象基板における欠陥や異物の有無を検査する基板検査装置を例に、除去機構42による異物除去を説明したが、基板検査装置とは別に異物除去装置を設け、基板検査装置の検査結果(異物の位置情報)を異物除去装置に取り込み、検査結果に基づいて異物を除去するようにしても良い。例えば、異物除去装置は、図1に示すマスク検査装置1から欠陥や異物を検査する機能を省略し、異物の位置情報を他のマスク検査装置から取り込んで記憶部220に記憶させ、その位置情報に基づいて異物を除去する。
【0068】
すなわち、検査対象基板であるマスク116、複数の粘着性粒子が離脱可能に設けられた剥離シート20、および粘着部材22が装着されるマスクホルダ117と、マスクホルダ117に対してマニピュレータ(ナノピンセット10)と検出部41とを一体に相対移動させる鉛直方向駆動機構123および水平方向駆動機構124とを備え、検出部41によりマスク116を撮像して、マスク116上の異物を表示装置230に表示して観察する。そして、制御装置200は、剥離シート20に設けられた複数の粘着性粒子のいずれか一つをナノピンセット10で保持して剥離シート20から離脱させ、観察結果に基づいて、ナノピンセット10に保持した粘着性粒子に異物を付着させてマスク116から除去し、粘着性粒子をナノピンセット10から粘着部材22へ移送するようにナノピンセット10を制御する。
【0069】
上述した各実施形態はそれぞれ単独に、あるいは組み合わせて用いても良い。それぞれの実施形態での効果を単独あるいは相乗して奏することができるからである。また、本発明の特徴を損なわない限り、本発明は上記実施の形態に何ら限定されるものではない。
【符号の説明】
【0070】
1:マスク検査装置、10:ナノピンセット、13a,13b:アーム、20:剥離シート、21:微小吸着粒子、22:粘着部材、41:検出部、42:除去機構、113:検出ヘッド、116:マスク、117:マスクホルダ、122:ヘッド用直角ステージ、123:鉛直方向駆動機構、124:水平方向駆動機構、200:制御装置、210:画像情報処理部、220:記憶部、230:表示装置、240:操作部、412:光学素子、422:Y方向駆動部、423:旋回駆動部
【特許請求の範囲】
【請求項1】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、
前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、
前記撮像装置により撮像した前記検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、
前記平板に設けられた複数の粘着性粒子のいずれか一つを前記マニピュレータで保持して前記平板から離脱させ、前記検査手段の検査結果に基づいて、前記マニピュレータに保持した前記粘着性粒子に前記異物を付着させて前記検査対象基板から除去し、該粘着性粒子を前記マニピュレータから前記粘着部材へ移送するように前記マニピュレータを制御する制御手段と、を備えたことを特徴とする基板検査装置。
【請求項2】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、
前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、
前記撮像装置により撮像した前記検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、
保持指令により、前記マニピュレータを前記平板へ移動し、前記複数の粘着性粒子のいずれか一つを前記マニピュレータで保持して前記平板から離脱させる保持制御手段と、
除去指令により、前記粘着性粒子を保持したマニピュレータを前記検査手段の検査結果に基づいて前記異物の位置へ移動し、該異物を前記粘着性粒子に付着させて前記検査対象基板から除去する除去制御手段と、
廃棄指令により、前記異物が付着した粘着性粒子を保持したマニピュレータを前記粘着部材へ移動し、該粘着性粒子を前記粘着部材に付着させて前記マニピュレータから前記粘着部材へ移送する廃棄制御手段と、を備えたことを特徴とする基板検査装置。
【請求項3】
請求項1または2に記載の基板検査装置において、
異物を前記検査対象基板から除去した後に、前記検査対象基板上の異物が除去された領域を前記撮像装置により撮像して前記表示手段に表示することを特徴とする基板検査装置。
【請求項4】
請求項1または2に記載の基板検査装置において、
前記撮像装置により撮像した画像を表示する表示手段を備え、
前記異物を前記検査対象基板から除去する際の除去動作、および、前記異物を前記粘着部材へ移送する際の移送動作を、前記撮像装置により撮像して前記表示手段に表示することを特徴とする基板検査装置。
【請求項5】
請求項4に記載の基板検査装置において、
前記異物を前記検査対象基板から除去した後に、前記検査対象基板上の異物が除去された領域を前記撮像装置により撮像して前記表示手段に表示することを特徴とする基板検査装置。
【請求項6】
請求項1〜5のいずれか一項に記載の基板検査装置において、
前記マニピュレータはMEMS技術で形成された微小ピンセットであり、該微小ピンセットにより前記粘着部材を把持することを特徴とする基板検査装置。
【請求項7】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、
前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、
前記撮像装置により前記検査対象基板を撮像して、該検査対象基板上の異物を観察する観察手段と、
前記平板に設けられた複数の粘着性粒子のいずれか一つを前記マニピュレータで保持して前記平板から離脱させ、前記観察手段の観察結果に基づいて、前記マニピュレータに保持した前記粘着性粒子に前記異物を付着させて前記検査対象基板から除去し、該粘着性粒子を前記マニピュレータから前記粘着部材へ移送するように前記マニピュレータを制御する制御手段と、を備えたことを特徴とする異物除去装置。
【請求項8】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した前記検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、を備える基板検査装置における異物除去方法であって、
前記複数の粘着性粒子のいずれか一つをマニピュレータにより保持して前記平板から離脱させる第1の工程と、
前記異物に関する検査結果に基づいて、前記マニピュレータで保持した粘着性粒子に前記検査対象基板上の異物を付着させる第2の工程と、
前記異物が付着した粘着性粒子を粘着部材に押し付けて付着させることにより、該粘着性粒子を前記マニピュレータから前記粘着部材へ移送する第3の工程と、を有することを特徴とする異物除去方法。
【請求項1】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、
前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、
前記撮像装置により撮像した前記検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、
前記平板に設けられた複数の粘着性粒子のいずれか一つを前記マニピュレータで保持して前記平板から離脱させ、前記検査手段の検査結果に基づいて、前記マニピュレータに保持した前記粘着性粒子に前記異物を付着させて前記検査対象基板から除去し、該粘着性粒子を前記マニピュレータから前記粘着部材へ移送するように前記マニピュレータを制御する制御手段と、を備えたことを特徴とする基板検査装置。
【請求項2】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、
前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、
前記撮像装置により撮像した前記検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、
保持指令により、前記マニピュレータを前記平板へ移動し、前記複数の粘着性粒子のいずれか一つを前記マニピュレータで保持して前記平板から離脱させる保持制御手段と、
除去指令により、前記粘着性粒子を保持したマニピュレータを前記検査手段の検査結果に基づいて前記異物の位置へ移動し、該異物を前記粘着性粒子に付着させて前記検査対象基板から除去する除去制御手段と、
廃棄指令により、前記異物が付着した粘着性粒子を保持したマニピュレータを前記粘着部材へ移動し、該粘着性粒子を前記粘着部材に付着させて前記マニピュレータから前記粘着部材へ移送する廃棄制御手段と、を備えたことを特徴とする基板検査装置。
【請求項3】
請求項1または2に記載の基板検査装置において、
異物を前記検査対象基板から除去した後に、前記検査対象基板上の異物が除去された領域を前記撮像装置により撮像して前記表示手段に表示することを特徴とする基板検査装置。
【請求項4】
請求項1または2に記載の基板検査装置において、
前記撮像装置により撮像した画像を表示する表示手段を備え、
前記異物を前記検査対象基板から除去する際の除去動作、および、前記異物を前記粘着部材へ移送する際の移送動作を、前記撮像装置により撮像して前記表示手段に表示することを特徴とする基板検査装置。
【請求項5】
請求項4に記載の基板検査装置において、
前記異物を前記検査対象基板から除去した後に、前記検査対象基板上の異物が除去された領域を前記撮像装置により撮像して前記表示手段に表示することを特徴とする基板検査装置。
【請求項6】
請求項1〜5のいずれか一項に記載の基板検査装置において、
前記マニピュレータはMEMS技術で形成された微小ピンセットであり、該微小ピンセットにより前記粘着部材を把持することを特徴とする基板検査装置。
【請求項7】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、
前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、
前記撮像装置により前記検査対象基板を撮像して、該検査対象基板上の異物を観察する観察手段と、
前記平板に設けられた複数の粘着性粒子のいずれか一つを前記マニピュレータで保持して前記平板から離脱させ、前記観察手段の観察結果に基づいて、前記マニピュレータに保持した前記粘着性粒子に前記異物を付着させて前記検査対象基板から除去し、該粘着性粒子を前記マニピュレータから前記粘着部材へ移送するように前記マニピュレータを制御する制御手段と、を備えたことを特徴とする異物除去装置。
【請求項8】
検査対象基板、複数の粘着性粒子が離脱可能に設けられた平板、および粘着部材が装着されるホルダと、前記ホルダに対してマニピュレータと撮像装置とを一体に相対移動させる移動手段と、撮像装置により撮像した前記検査対象基板の撮像情報に基づいて、欠陥および異物の有無を検査する検査手段と、を備える基板検査装置における異物除去方法であって、
前記複数の粘着性粒子のいずれか一つをマニピュレータにより保持して前記平板から離脱させる第1の工程と、
前記異物に関する検査結果に基づいて、前記マニピュレータで保持した粘着性粒子に前記検査対象基板上の異物を付着させる第2の工程と、
前記異物が付着した粘着性粒子を粘着部材に押し付けて付着させることにより、該粘着性粒子を前記マニピュレータから前記粘着部材へ移送する第3の工程と、を有することを特徴とする異物除去方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−133433(P2011−133433A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−295229(P2009−295229)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000115902)レーザーテック株式会社 (184)
【出願人】(390022471)アオイ電子株式会社 (85)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000115902)レーザーテック株式会社 (184)
【出願人】(390022471)アオイ電子株式会社 (85)
【Fターム(参考)】
[ Back to top ]