
基板検査装置および基板検査方法
【課題】大型の基板に対しても正確な検査を可能にする。
【解決手段】基板検査装置1は、基板Wを支持する基板搬送面を形成する複数の浮上プレート132が短手方向に互いに所定幅の隙間を空けて配列する搬送ステージ131と、基板搬送面より下方に配置され、隣り合う浮上プレート132の間から基板Wを照明する投下照明138と、搬送ステージ131の上方を該搬送ステージ131に対して水平に移動可能な光学ユニット16と、搬送ステージ131上の基板Wを短手方向に所定距離移動させるシフト機構135aおよび135bと、を備える。
【解決手段】基板検査装置1は、基板Wを支持する基板搬送面を形成する複数の浮上プレート132が短手方向に互いに所定幅の隙間を空けて配列する搬送ステージ131と、基板搬送面より下方に配置され、隣り合う浮上プレート132の間から基板Wを照明する投下照明138と、搬送ステージ131の上方を該搬送ステージ131に対して水平に移動可能な光学ユニット16と、搬送ステージ131上の基板Wを短手方向に所定距離移動させるシフト機構135aおよび135bと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板検査装置および基板検査方法に関する。
【背景技術】
【0002】
従来、液晶ディスプレイ(LCD:Liquid Crystal Display)やPDP(Plasma Display Panel)や有機EL(ElectroLuminescence)ディスプレイや表面電動方電子放出素子ディスプレイ(SED:Surface−conduction Electro−emitter Display)などのFPD(Flat Panel Display)基板や、半導体ウエハや、プリント基板など、各種基板の製造では、その歩留りを向上するために、各パターニングプロセス後、逐次、配線の短絡や接続不良や断線やパターン不良などのパターニングエラーが存在するか否かが検査される。このような基板検査の技術としては、たとえば以下に示す特許文献1が開示するところによる基板検査装置が存在する。この基板検査装置は、基板が載置される浮上プレートより下方から基板を照明しつつ基板検査を行う、いわゆる透過照明型の基板検査装置である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−91435号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、透過照明型の基板検査装置において、透過照明用の光源にLED(発光ダイオード)などの点光源を用いた場合、光源と基板上の欠陥との位置関係によってはその欠陥を正しくレビューできない場合がある。そこで従来では、欠陥レビュー用のコンデンサレンズの上方にレビュー対象の個々の欠陥が位置するように基板を移動させていた。このため、欠陥の数に応じて基板を移動させる必要が生じ、この結果、基板全体に対するタクトタイムが増加する場合があるという問題が存在した。
【0005】
そこで本発明は、基板全体に対するタクトタイムの増加を低減することが可能な基板検査装置および基板検査方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために、本発明による基板検査装置は、基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージと、前記基板搬送面より下方に配置され、隣り合う前記プレートの間から前記基板を照明する面光源と、前記ステージの上方を該ステージに対して水平に移動可能な光学ユニットと、前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動部と、を備えたことを特徴とする。
【0007】
また、本発明による基板検査方法は、基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージ上に載置された基板を前記基板搬送面より下方に配置された面光源を用いて照明しつつ検査する基板検査方法であって、隣り合う前記プレートの間の領域上に位置する基板の1つ以上の領域を検査する検査ステップと、前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動ステップと、を含むことを特徴とする。
【発明の効果】
【0008】
本発明によれば、浮上プレートなどの影となって照明されていなかった基板の領域を、基板を移動させて照明し直すことが可能であるため、大型の基板に対しても正確な検査が可能な基板検査装置および基板検査方法を実現することが可能となる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の実施の形態1による基板検査装置の概略構成を示す斜視図である。
【図2】図2は、本実施の形態1による基板ホルダの概略構成を示す上視図である。
【図3】図3は、図2に示す状態から基板を移動させた場合を説明するための基板ホルダの上視図である。
【図4】図3は、図2に示す状態から基板を移動させた場合を説明するための基板ホルダの上視図である。
【図5】図5は、本実施の形態1において浮上プレートの幅と隣接する浮上プレート間の距離とが等しい場合を説明するための模式図である。
【図6】図6は、本実施の形態1において浮上プレートの幅が隣接する浮上プレート間の距離のn倍の場合を説明するための模式図である。
【図7】図7は、本実施の形態1による基板検査装置の駆動機構の概略構成を示すブロック図である。
【図8】図8は、本実施の形態1による基板検査方法の概略を示すフローチャートである。
【図9】図9は、本実施の形態1による基板検査処理の概略を示すフローチャートである。
【図10】図10は、本実施の形態1の変形例1による搬送ステージの概略構成を示す一部断面図である。
【図11】図11は、本実施の形態1の変形例2による搬送ステージの概略構成を示す一部断面図である。
【図12】図12は、本発明の実施の形態2による基板検査方法の概略を示すフローチャートである。
【図13】図13は、本実施の形態2による基板検査方法におけるシフト動作の概略を説明するための図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態を図面と共に詳細に説明する。なお、以下の説明において、各図は本発明の内容を理解でき得る程度に形状、大きさ、および位置関係を概略的に示してあるに過ぎず、従って、本発明は各図で例示された形状、大きさ、および位置関係のみに限定されるものではない。また、各図では、構成の明瞭化のため、断面におけるハッチングの一部が省略されている。さらに、後述において例示する数値は、本発明の好適な例に過ぎず、従って、本発明は例示された数値に限定されるものではない。
【0011】
(実施の形態1)
まず、本発明の実施の形態1による基板検査装置および基板検査方法を、図面を参照して詳細に説明する。図1は、本実施の形態1による基板検査装置の概略構成を示す斜視図である。なお、以下の説明では、検査対象の基板に対して光学系ユニットを移動するタイプの基板検査装置を例に挙げる。ただし、これに限定されず、光学ユニットに対して基板を移動するタイプの基板検査装置に適用することも可能である。
【0012】
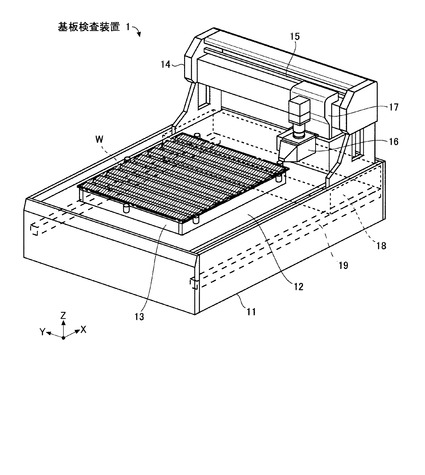
図1に示すように、基板検査装置1は、架台としてのベースフレーム11と、ベースフレーム11の天板であるステージ12と、ステージ12上に固定されて基板Wを保持する基板ホルダ13と、ステージ12をY方向に沿って跨ぐ門型フレーム14と、門型フレーム14に保持された光学ユニット16と、光学ユニット16を門型フレーム14ごとX方向に移動させる移動機構18と、を備える。門型フレーム14は、いわゆるガントリステージと呼ばれるものであり、Y方向に沿って設けられたY軸部材15を備える。光学ユニット16は、門型フレーム14をY軸部材15に沿って移動可能な移動機構17によって門型フレーム14に保持されている。移動機構17は、不図示の制御部からの制御の下、門型フレーム14をY軸部材15に沿って移動する。また、門型フレーム14に設けられた移動機構18は、たとえばステージ12の下に設置される。ステージ12の下には、X方向に沿って延在するX軸部材19も設けられている。移動機構18は、不図示の制御部からの制御の下、X軸部材19に沿って移動することで、光学ユニット15を門型フレーム14ごとX軸に沿って移動させる。
【0013】
つづいて、図1に示す基板ホルダ13について、より詳細に説明する。図2は、本実施の形態1による基板ホルダの概略構成を示す上視図である。図3は、図2に示す状態から基板を移動させた場合を説明するための基板ホルダの上視図である。
【0014】
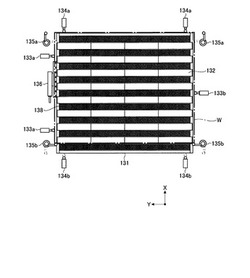
まず、図2に示すように、基板ホルダ13は、それぞれ1つの面に無数の微細な穴が形成された複数の浮上プレート132がこれの短手方向に互いに所定間隔を隔ててすのこ状に組み合わされてなる搬送ステージ131を備える。複数の浮上プレート132は、それぞれ無数の穴が形成された面が同じ上方を向くように配置されている。複数の浮上プレート132の上面は、基板Wが搬送される基板搬送面を形成する。この基板搬送面は、搬送ステージ131の上面に相当する。各浮上プレート132の内部は、たとえば空洞のバッファタンクである。この空洞には、不図示の送風機からエアが供給される。空洞に供給されたエアは、浮上プレート132に形成された無数の穴より吹き出す。これにより、基板ホルダ13上に載置された基板Wをエアによって浮上させることが可能となる(浮上搬送方式)。ただし、これに限定されず、基板搭載面に複数のローラを配列させた構成であってもよい(ローラ搬送方式)。この場合、搬送ステージ131を構成する複数の浮上プレート132は、エア吹き出し用の微細な穴の無い複数のプレートにそれぞれ置き換えることができる。この場合では、この複数のプレートの上面が、搬送ステージ131の上面に相当する基板搬送面を形成する。
【0015】
また、基板ホルダ13は、基板Wを搬送ステージ131に対して機械的に位置決めするための整列機構133aならびに133b、および、134aならびに134b(133a〜134b)を備える。整列機構133aおよび133bは、搬送ステージ131上の基板WをY軸に沿った方向から挟み込む位置に配置される。一方、整列機構134aおよび134bは、搬送ステージ131上の基板WをX軸に沿った方向から挟み込む位置に配置される。各整列機構133a〜134bは、たとえばシリンダとシリンダから突出可能な軸部材とからなり、この軸部材の先端で基板Wの側面を付勢することで、基板Wを搬送ステージ131に対して機械的に位置決めする。ただし、この他にも、段階的に軸部材を突出可能なステッピングモータなどを用いることも可能である。また、整列機構133a〜134bには、軸部材の突出量が2種類のうちから必要に応じて変化する、いわゆるON/OFFタイプのものを用いてもよいし、中間停止が可能な、すなわち、軸部材の突出量を3種類以上のうちから選択可能かもしくは連続的に変化可能なものを用いてもよい。なお、軸部材の突出量を3種類以上のうちから選択可能か、もしくは、連続的に変化可能な整列機構を用いた場合、基板Wを保持する保持機構136に代えて、整列機構を用いて基板Wを制止させておくことも可能である。
【0016】
さらに、基板ホルダ13は、基板Wを保持する保持機構136を備える。保持機構136は、基板Wを下面、上面および/または側面から吸着する吸着パッドを備える。この吸着パッドは、たとえば不図示の排気部に接続されており、この排気部の排気によって接触する基板Wを吸着する。これにより、基板Wが基板ホルダ13条に浮上した状態で保持機構136によって保持される。ただし、これに限定されず、基板Wの端部を把持するなど、基板Wを保持可能な構成であれば、種々変形することが可能である。
【0017】
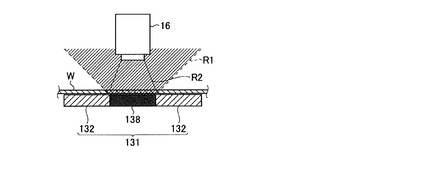
さらにまた、基板ホルダ13は、基板Wを光学ユニット14と反対側から照明する透過照明138を備える。図4は、本実施の形態1による搬送ステージの概略構成を示す一部断面図である。図4に示すように、透過照明138は、隣り合う浮上プレート132の間に配置されている。この透過照明138は、面光源であることが好ましい。これにより、図4の照明領域R1と撮像領域R2とに示されるように、基板Wの撮像領域R2をムラなく照明することが可能となる。また、このような透過照明138は、たとえば蛍光灯、LED(Light Emitting Diode)、または、ハロゲンランプ等で構成することができる。
【0018】
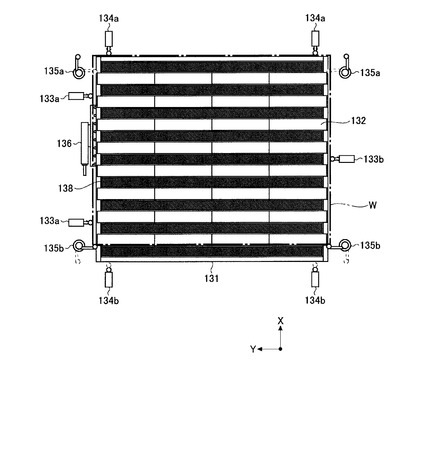
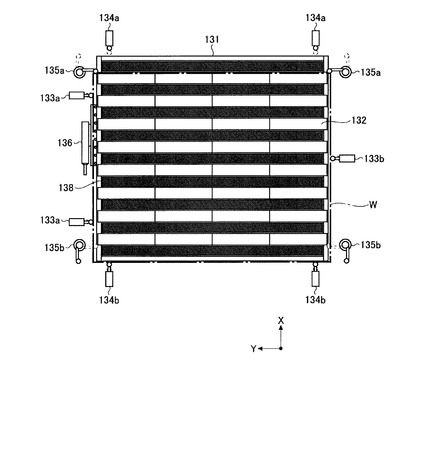
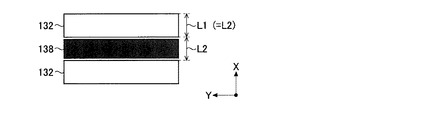
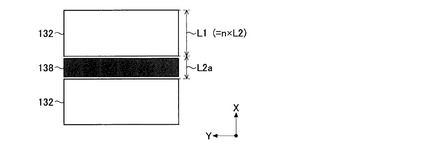
さらにまた、基板ホルダ13は、たとえば図2および図3に示すように、基板Wを搬送ステージ131に対して浮上プレート132の配列方向、すなわちX方向に所定距離シフトさせるシフト機構135aおよび135bを備える。ここで、シフト機構135aおよび135bによる基板Wのシフト量と、浮上プレート132の幅(すなわち、X方向の長さ)と、隣接する浮上プレート132間の距離との関係について、図面を用いて詳細に説明する。図5は、本実施の形態1において浮上プレートの幅と隣接する浮上プレート間の距離とが等しい場合を説明するための模式図である。図6は、本実施の形態1において浮上プレートの幅が隣接する浮上プレート間の距離のn倍の場合を説明するための模式図である。
【0019】
たとえば、図5に示すように、浮上プレート132の幅L1と隣接する浮上プレート132間の距離L2とが等しい場合、シフト機構135aおよび135bは、基板Wの一度の移動の際に、浮上プレート132の幅L1分、基板WをX方向に移動させる。これにより、基板Wにおける透過照明138によって照明されていなかった領域を、あらたに照明することが可能となる。また、図6に示すように、浮上プレートの幅L1が隣接する浮上プレート132間の距離L2aのn倍である場合、シフト機構135aおよび135bは、X方向への距離L2aの移動をn回(nが自然数でない場合は小数点以下切り上げ)、繰り返す。これにより、基板Wにおける透過照明138によって照明されていなかった領域を複数回に分けて適宜照明することが可能となる。本実施の形態1では、以上のように、基板Wを必要に応じて浮上プレート132の配列方向にシフトさせることで、基板Wにおける素子形成領域全体を照明可能な領域とすることを可能にする。なお、基板Wをシフトさせた際、このシフト方向へ門型ステージ14を移動させてもよい。これにより、シフトさせた分の座標を機械的に補正することが可能となる。ただし、これに限定されず、シフトさせた分の座標をソフト的に補正してもよい。また、基板Wの一度のシフト量としては、浮上プレート132の幅(短手方向の長さ)のみならず、この幅に光学ユニット16における対物レンズの視野範囲を加えた値以上としてもよい。これにより、光学ユニット16の視野範囲全てを透過照明することが可能となる。
【0020】
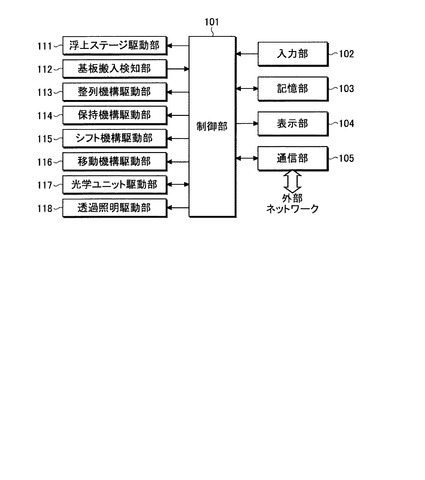
つぎに、基板検査装置1を動作させる駆動機構について、図面を用いて詳細に説明する。図7は、本実施の形態1による基板検査装置の駆動機構の概略構成を示すブロック図である。図7に示すように、基板検査装置1は、全体の動作を制御する制御部101と、搬送ステージ131を駆動して基板Wを浮上させる搬送ステージ駆動部111と、外部の基板搬入機構から基板Wが搬入されたか否かを検知する基板搬入検知部112と、整列機構133a〜134bを駆動することで搬入された基板Wを搬送ステージ131に対して所定の位置に機械的にアライメントする整列機構駆動部113と、保持機構136を駆動して基板Wを保持/開放する保持機構駆動部114と、シフト機構135aおよび135bを駆動して基板WをX方向に所定距離シフトさせるシフト機構駆動部115と、移動機構18をX軸部材19に沿って移動させることで光学ユニット16を門型フレーム14ごとX方向に移動させる移動機構駆動部116と、光学ユニット16を駆動して基板Wを撮像する光学ユニット駆動部117と、透過照明138を駆動して基板Wを光学ユニット16と反対側から照明する透過照明駆動部118と、を備える。なお、基板搬入検知部112は、搬送ステージ131の基板搬入口に設けられた不図示のセンサからの信号に基づいて、基板Wが搬入されたか否かを検知する。また、光学ユニット16によって取得された画像は、たとえば制御部101によって解析され、欠陥などが検出される。
【0021】
また、基板検査装置1は、ユーザが各種設定や指示を入力する入力部102と、各種プログラムやパラメータ、ならびに、取得された画像データ等を適宜記憶する記憶部103と、取得/記憶された画像や各種情報を表示する表示部104と、外部との通信を制御する通信部105と、を備える。
【0022】
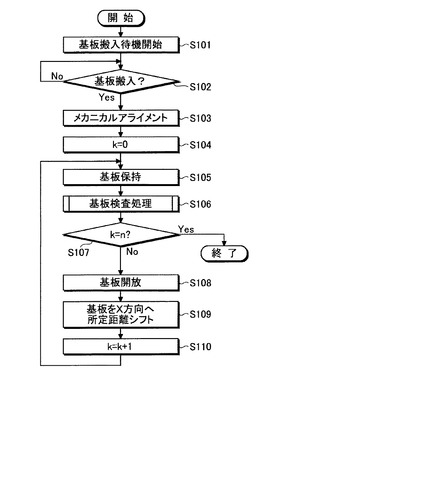
次に、本実施の形態1による基板検査方法を、図面を用いて詳細に説明する。図8は、本実施の形態1による基板検査方法の概略を示すフローチャートである。以下の説明では、図7に示す制御部101の動作に着目する。図8に示すように、本実施の形態1による基板検査方法では、制御部101は、まず、外部の基板搬入機構から基板Wが搬入されることの待機を開始する(ステップS101)。具体的には、制御部101は、搬送ステージ駆動部111を介して搬送ステージ131からエアを吹き出させる。つづいて、制御部101は、基板搬入検知部112によって基板Wの搬入が検知されたか否かを判定し(ステップS102)、基板Wの搬入が検知されるまで待機する(ステップS102のNo)。その後、基板Wの搬入が検知されると(ステップS102のYes)、制御部101は、整列機構駆動部112を介して整列機構133a〜134bを駆動することで、基板Wを搬送ステージ131の基準位置に対してアライメントとする(ステップS103)。
【0023】
つぎに、制御部101は、不図示のカウンタのカウント値kに0をセット(k=0)する(ステップS104)。つぎに、制御部101は、保持機構駆動部114を介して保持機構136を駆動することで、所定位置にアライメントされた基板Wを保持する(ステップS105)。つぎに、制御部101は、移動機構駆動部116を介して移動機構18を駆動することで、光学ユニット16を門型フレーム14ごとX方向に移動させるとともに、光学ユニット駆動部117を介して光学ユニット16を駆動することで、光学ユニット16をY方向に移動させて基板Wにおけるターゲットとする座標の画像を取得する基板検査処理を実行する(ステップS106)。なお、基板検査処理の詳細については、後述において説明する。
【0024】
つぎに、制御部101は、カウント値kが予め設定された値nであるか否か(k=n)を判定し(ステップS107)、k=nである場合(ステップS107のYes)、処理を終了する。なお、たとえば浮上プレート132の幅L1が隣接する浮上プレート132間の距離L2と等しい場合、値nはたとえば1であり、たとえば浮上プレート132の幅L1が隣接する浮上プレート132間の距離の5倍である場合、値nは5である。
【0025】
ステップS107の判定の結果、k≠nである場合(ステップS107のNo)、制御部101は、保持機構駆動部114を介して保持機構136を駆動することで、基板Wの保持を解除(開放)し(ステップS108)、つづいて、シフト機構駆動部115を介してシフト機構135aおよび135bを駆動することで、基板WをX方向に所定距離(たとえばL2)移動させる(ステップS109)。この際、基板WのY方向への移動は、基板WをY軸に沿った方向から挟み込む整列機構133aおよび133bによって制限されているとよい。なお、整列機構133aおよび133bには、アライメント時に基板Wが嵌まる溝が形成されていてもよい。また、整列機構133aおよび133bは、基板Wと接触する面の向きが回転可能であってもよい。これにより、基板WがX−Y平面内において所望する方向に対して回転している場合でも、基板Wを傷つけずに所望する方向へ整列させることが可能となる。また、基板WのX方向へのシフトには、シフト機構135aおよび135bの代わりに保持機構136を用いてもよい。この場合、シフト機構駆動部115ならびにシフト機構135aおよび135bの構成に加えて、図8のステップS108の動作を省略することができる。
【0026】
つぎに、制御部101は、カウント値kを1つインクリメント(k=k+1)し(ステップS110)、その後、ステップS105へ帰還する。制御部101は、以上のようにして、n回、基板Wをシフトさせつつ検査を行うことで、基板W全体に対する基板検査を実行する。
【0027】
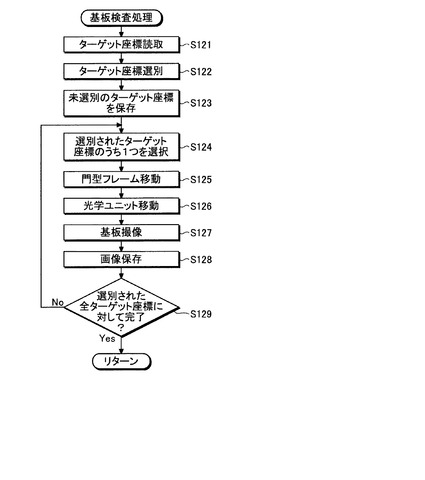
つぎに、図8のステップS106に示す基板検査処理について、図面を用いて詳細に説明する。図9は、本実施の形態1による基板検査処理の概略を示すフローチャートである。図9に示すように、基板検査処理では、制御部101は、まず、たとえば記憶部103等の記憶領域に記憶されている検査対象位置を示す座標(以下、ターゲット座標という)を読み取る(ステップS121)。なお、ターゲット座標は、たとえば欠陥や検査パターンなどの検査対象の座標である。このターゲット座標は、たとえば基板Wにおける特定の位置(たとえばアライメントマーク位置)を基準とした座標系に、搬送ステージ13に設定された座標系や光学ユニット16の座標系を加味することで求めることが可能である。また、ターゲット座標は、たとえばキーボードやマウスやジョイスティックなどの入力部102からユーザが適宜入力した座標であってもよい。
【0028】
つぎに、制御部101は、現在の搬送ステージ131に対する基板Wの位置に基づいて、ステップS121において特定したターゲット座標のうち検査可能なターゲット座標を選別する(ステップS122)。具体的には、制御部101は、基板Wと基板Wに対する搬送ステージ131の各浮上プレート132の位置とから、浮上プレート132の上方に位置しないターゲット座標、すなわち透過照明138上の領域に含まれるターゲット座標を特定し、これを選別する。また、制御部101は、ステップS121において特定したターゲット座標のうちステップS122において選別されなかったターゲット座標をたとえば記憶部103等に保存しておく(ステップS123)。
【0029】
つぎに、制御部101は、ステップS122において選別されたターゲット座標のうち1つを選択し(ステップS124)、このターゲット座標上に光学ユニット16が位置するように、移動機構18を駆動して門型フレーム14をX方向に移動させる(ステップS125)と共に、光学ユニット15をY方向に移動させる(ステップS126)。ただし、基板Wの座標系と、門型フレーム14を移動させる移動機構18の座標系と、光学ユニット16の移動における座標系とは、必ずしも一致するとは限らない。そこで、制御部101は、光学ユニット16を確実にターゲット座標上へ移動させるために、たとえばステップS125およびS126において、座標系の補正を行うとよい。また、ターゲット座標の選択の順序は、たとえば、X座標の小さい若しくは大きい順であって、Y座標の小さい若しくは大きい順など、種々の選択方法を用いることができる。この際、門型フレーム14および/または光学ユニット16の移動距離が最短距離になるよう順序でターゲット座標を選択することで、基板検査のタクトタイムをより短縮することが可能となる。
【0030】
以上のようにして光学ユニット16をターゲット座標上に移動させると、つぎに制御部101は、光学ユニット16を駆動することで、基板Wにおけるターゲット座標を含む領域を撮像し(ステップS127)、これにより取得された画像を記憶部103等に保存する(ステップS128)。
【0031】
その後、制御部101は、ステップS122において選別した全てのターゲット座標に対する処理が完了したか否かを判定し(ステップS129)、完了した場合(ステップS129のYes)、図8に示す処理へリターンする。一方、完了していない場合(ステップS129のNo)、制御部101は、ステップS124へ帰還し、未選択のターゲット座標のうち1つを選択して、以降の動作を実行する。
【0032】
以上のように、本実施の形態1によれば、浮上プレート132などの影となって照明されていなかった領域を、基板Wを移動させて照明し直すことが可能である。これにより、大型の基板に対しても正確な検査が可能となる。
【0033】
(変形例1)
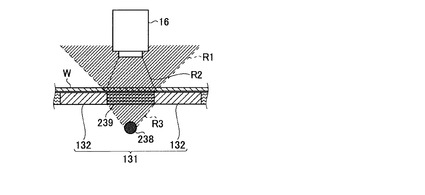
ここで、上述した搬送ステージの変形例1を、以下に図面を用いて詳細に説明する。図10は、本変形例1による搬送ステージの概略構成を示す一部断面図である。図10に示すように、本変形例1では、透過照明138の代わりに、光拡散板239が隣り合う浮上プレート132の間に配置されている。また、搬送ステージ131の下方に、蛍光灯、LED(Light Emitting Diode)、または、ハロゲンランプ等の光源238が配置されている。光拡散板239とは、図10の照明領域R1に示されるように、光源238からの光を拡散しつつ透過させる。この結果、面光源である透過照明138を用いた場合と同様に、基板Wの撮像領域R2をムラなく照明することが可能となる。言い換えれば、光源238および光拡散板239は、組み合わされることで面光源として機能する。このように、本実施の形態1による透過照明は、実質的に基板Wを大きさを持って照明することが可能な光源であれば、如何なるものも含まれる。本説明では、この光源を面光源という。また、光拡散板と搬送ステージの高さを略同一にすることで、各搬送ステージの間隔が広くても基板の撓みを防止することが可能になる。また、光拡散板と浮上プレートの間に隙間を設けることで空気溜まりを防止することも可能になる。
【0034】
(変形例2)
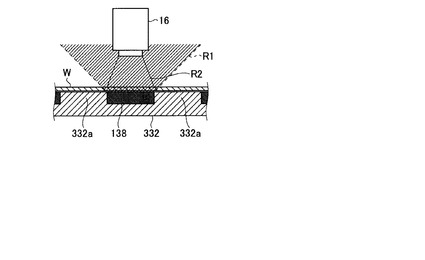
また、上述した搬送ステージの他の変形例2を、以下に図面を用いて詳細に説明する。図11は、本変形例2による搬送ステージの概略構成を示す一部断面図である。図11に示すように、本変形例2による搬送ステージ332は、上部に帯状の凸部332aを複数備えた板状の部材よりなる。凸部332aの上面には、浮上プレート132と同様に、エアを吹き出すことが可能な複数の穴が設けられている。透過照明138は、隣り合う凸部332aの間に配置される。これにより、上述の実施の形態1または変形例1と同様に、板Wの撮像領域R2をムラなく照明することが可能となる。
【0035】
なお、上記した実施の形態1および変形例では、基板検査装置にラインスキャン系またはレビュー系の光学ユニットを搭載した場合を例に挙げたが、これに限定されず、その両方を基板検査装置に搭載してもよい。
【0036】
また、上述した実施の形態1では、浮上プレート132がX方向に配列した場合を例に挙げたが、これに限定されず、Y方向に配列していてもよい。この場合、シフト機構135aおよび135bは、Y方向に基板Wを所定距離シフトさせる。なお、この場合、整列機構133aおよび133aと整列機構134aおよび134bとが入れ代わる。
【0037】
(実施の形態2)
つぎに、本発明の実施の形態2による基板検査装置および基板検査方法を、図面を参照して詳細に説明する。本実施の形態2による基板検査装置は、上述した実施の形態1による基板検査装置1と同様である。ただし、本実施の形態2では、基板検査方法が、図12に示す基板検査方法に置き換えられる。
【0038】
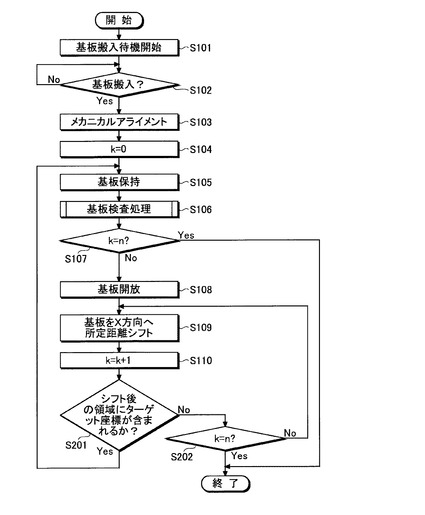
図12に示すように、本実施の形態2による基板検査方法では、図8のステップS101〜S110と同様の行程を経た後、ステップS109で基板Wをシフトした後の撮像領域または照明領域にターゲット座標が含まれるか否かを判定する(ステップS201)。この判定の結果、シフト後の領域にターゲット座標が含まれている場合(ステップS201のYes)、制御部101は、ステップS105へ帰還し、移行の動作を実行する。一方、シフト後の領域にターゲット座標が含まれていない場合(ステップS201のNo)、制御部101は、カウント値kが値nであるか否か(k=n)を判定し(ステップS202)、k=nである場合(ステップS202のYes)、処理を終了する。一方、k≠nである場合(ステップS202のNo)、制御部101は、ステップS109へ移行する。これにより、ターゲットとなる欠陥が存在しない領域についての基板検査処理S106をスキップすることが可能となる。これを、図13に例示するケースを用いて説明する。
【0039】
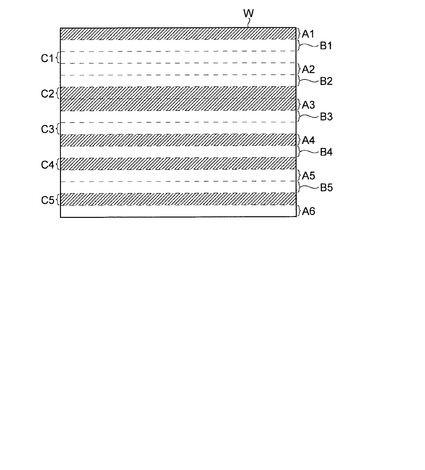
図13は、本実施の形態2による基板検査方法におけるシフト動作の概略を説明するための図である。なお、図13に示す例では、基板Wの総シフト回数nを2回とし、シフト回数k=0のときの撮像領域を領域A1〜A6とし、シフト回数k=1のときの撮像領域を領域B1〜B5とし、シフト回数k=2のときの撮像領域を領域C1〜C5とする。また、領域A1〜A6、B1〜B5およびC1〜C5のうち、図13において斜線のハッチングにて示す領域A1、A3、A4、C2、C4およびC5には、欠陥座標などのターゲット座標が含まれ、それ以外にはターゲット座標が含まれないとする。この例では、シフト回数n=1のときの撮像領域である領域B1〜B5の全てにターゲット座標が含まれていない。そこで本実施の形態2では、シフト回数k=1の際にシフト後の領域にターゲット座標が含まれていないとして(図12のステップS201のNo)、領域B1〜B5に対する基板検査処理(ステップS106)をスキップし、基板Wをさらにシフトさせる(ステップS109)。これにより、撮像領域にターゲット座標が存在しない際の基板検査処理を省略できるため、基板検査におけるタクトタイムを短縮することが可能となる。
【0040】
なお、その他の構成および動作は、上述の実施の形態1またはその変形例と同様であるため、ここでは詳細な説明を省略する。
【0041】
また、上記実施の形態およびその変形例は本発明を実施するための例にすぎず、本発明はこれらに限定されるものではなく、仕様等に応じて種々変形することは本発明の範囲内であり、更に本発明の範囲内において、他の様々な実施の形態が可能であることは上記記載から自明である。例えば各実施の形態に対して適宜例示した変形例は、他の実施の形態に対して適用することも可能であることは言うまでもない。
【符号の説明】
【0042】
1 基板検査装置
11 ベースフレーム
12 ステージ
13 基板ホルダ
14 門型フレーム
15 Y軸部材
16 光学ユニット
17、18 移動機構
19 X軸部材
101 制御部
102 入力部
103 記憶部
104 表示部
105 通信部
111 搬送ステージ駆動部
112 基板搬入検知部
113 整列機構駆動部
114 保持機構駆動部
115 シフト機構駆動部
116 移動機構駆動部
117 光学ユニット駆動部
118 透過照明駆動部
131、332 搬送ステージ
132 浮上プレート
133a、133b、134a、134b 整列機構
135a、135b シフト機構
136 保持機構
138 透過照明
238 光源
239 光拡散板
332a 凸部
W 基板
【技術分野】
【0001】
本発明は、基板検査装置および基板検査方法に関する。
【背景技術】
【0002】
従来、液晶ディスプレイ(LCD:Liquid Crystal Display)やPDP(Plasma Display Panel)や有機EL(ElectroLuminescence)ディスプレイや表面電動方電子放出素子ディスプレイ(SED:Surface−conduction Electro−emitter Display)などのFPD(Flat Panel Display)基板や、半導体ウエハや、プリント基板など、各種基板の製造では、その歩留りを向上するために、各パターニングプロセス後、逐次、配線の短絡や接続不良や断線やパターン不良などのパターニングエラーが存在するか否かが検査される。このような基板検査の技術としては、たとえば以下に示す特許文献1が開示するところによる基板検査装置が存在する。この基板検査装置は、基板が載置される浮上プレートより下方から基板を照明しつつ基板検査を行う、いわゆる透過照明型の基板検査装置である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−91435号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、透過照明型の基板検査装置において、透過照明用の光源にLED(発光ダイオード)などの点光源を用いた場合、光源と基板上の欠陥との位置関係によってはその欠陥を正しくレビューできない場合がある。そこで従来では、欠陥レビュー用のコンデンサレンズの上方にレビュー対象の個々の欠陥が位置するように基板を移動させていた。このため、欠陥の数に応じて基板を移動させる必要が生じ、この結果、基板全体に対するタクトタイムが増加する場合があるという問題が存在した。
【0005】
そこで本発明は、基板全体に対するタクトタイムの増加を低減することが可能な基板検査装置および基板検査方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために、本発明による基板検査装置は、基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージと、前記基板搬送面より下方に配置され、隣り合う前記プレートの間から前記基板を照明する面光源と、前記ステージの上方を該ステージに対して水平に移動可能な光学ユニットと、前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動部と、を備えたことを特徴とする。
【0007】
また、本発明による基板検査方法は、基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージ上に載置された基板を前記基板搬送面より下方に配置された面光源を用いて照明しつつ検査する基板検査方法であって、隣り合う前記プレートの間の領域上に位置する基板の1つ以上の領域を検査する検査ステップと、前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動ステップと、を含むことを特徴とする。
【発明の効果】
【0008】
本発明によれば、浮上プレートなどの影となって照明されていなかった基板の領域を、基板を移動させて照明し直すことが可能であるため、大型の基板に対しても正確な検査が可能な基板検査装置および基板検査方法を実現することが可能となる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の実施の形態1による基板検査装置の概略構成を示す斜視図である。
【図2】図2は、本実施の形態1による基板ホルダの概略構成を示す上視図である。
【図3】図3は、図2に示す状態から基板を移動させた場合を説明するための基板ホルダの上視図である。
【図4】図3は、図2に示す状態から基板を移動させた場合を説明するための基板ホルダの上視図である。
【図5】図5は、本実施の形態1において浮上プレートの幅と隣接する浮上プレート間の距離とが等しい場合を説明するための模式図である。
【図6】図6は、本実施の形態1において浮上プレートの幅が隣接する浮上プレート間の距離のn倍の場合を説明するための模式図である。
【図7】図7は、本実施の形態1による基板検査装置の駆動機構の概略構成を示すブロック図である。
【図8】図8は、本実施の形態1による基板検査方法の概略を示すフローチャートである。
【図9】図9は、本実施の形態1による基板検査処理の概略を示すフローチャートである。
【図10】図10は、本実施の形態1の変形例1による搬送ステージの概略構成を示す一部断面図である。
【図11】図11は、本実施の形態1の変形例2による搬送ステージの概略構成を示す一部断面図である。
【図12】図12は、本発明の実施の形態2による基板検査方法の概略を示すフローチャートである。
【図13】図13は、本実施の形態2による基板検査方法におけるシフト動作の概略を説明するための図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態を図面と共に詳細に説明する。なお、以下の説明において、各図は本発明の内容を理解でき得る程度に形状、大きさ、および位置関係を概略的に示してあるに過ぎず、従って、本発明は各図で例示された形状、大きさ、および位置関係のみに限定されるものではない。また、各図では、構成の明瞭化のため、断面におけるハッチングの一部が省略されている。さらに、後述において例示する数値は、本発明の好適な例に過ぎず、従って、本発明は例示された数値に限定されるものではない。
【0011】
(実施の形態1)
まず、本発明の実施の形態1による基板検査装置および基板検査方法を、図面を参照して詳細に説明する。図1は、本実施の形態1による基板検査装置の概略構成を示す斜視図である。なお、以下の説明では、検査対象の基板に対して光学系ユニットを移動するタイプの基板検査装置を例に挙げる。ただし、これに限定されず、光学ユニットに対して基板を移動するタイプの基板検査装置に適用することも可能である。
【0012】
図1に示すように、基板検査装置1は、架台としてのベースフレーム11と、ベースフレーム11の天板であるステージ12と、ステージ12上に固定されて基板Wを保持する基板ホルダ13と、ステージ12をY方向に沿って跨ぐ門型フレーム14と、門型フレーム14に保持された光学ユニット16と、光学ユニット16を門型フレーム14ごとX方向に移動させる移動機構18と、を備える。門型フレーム14は、いわゆるガントリステージと呼ばれるものであり、Y方向に沿って設けられたY軸部材15を備える。光学ユニット16は、門型フレーム14をY軸部材15に沿って移動可能な移動機構17によって門型フレーム14に保持されている。移動機構17は、不図示の制御部からの制御の下、門型フレーム14をY軸部材15に沿って移動する。また、門型フレーム14に設けられた移動機構18は、たとえばステージ12の下に設置される。ステージ12の下には、X方向に沿って延在するX軸部材19も設けられている。移動機構18は、不図示の制御部からの制御の下、X軸部材19に沿って移動することで、光学ユニット15を門型フレーム14ごとX軸に沿って移動させる。
【0013】
つづいて、図1に示す基板ホルダ13について、より詳細に説明する。図2は、本実施の形態1による基板ホルダの概略構成を示す上視図である。図3は、図2に示す状態から基板を移動させた場合を説明するための基板ホルダの上視図である。
【0014】
まず、図2に示すように、基板ホルダ13は、それぞれ1つの面に無数の微細な穴が形成された複数の浮上プレート132がこれの短手方向に互いに所定間隔を隔ててすのこ状に組み合わされてなる搬送ステージ131を備える。複数の浮上プレート132は、それぞれ無数の穴が形成された面が同じ上方を向くように配置されている。複数の浮上プレート132の上面は、基板Wが搬送される基板搬送面を形成する。この基板搬送面は、搬送ステージ131の上面に相当する。各浮上プレート132の内部は、たとえば空洞のバッファタンクである。この空洞には、不図示の送風機からエアが供給される。空洞に供給されたエアは、浮上プレート132に形成された無数の穴より吹き出す。これにより、基板ホルダ13上に載置された基板Wをエアによって浮上させることが可能となる(浮上搬送方式)。ただし、これに限定されず、基板搭載面に複数のローラを配列させた構成であってもよい(ローラ搬送方式)。この場合、搬送ステージ131を構成する複数の浮上プレート132は、エア吹き出し用の微細な穴の無い複数のプレートにそれぞれ置き換えることができる。この場合では、この複数のプレートの上面が、搬送ステージ131の上面に相当する基板搬送面を形成する。
【0015】
また、基板ホルダ13は、基板Wを搬送ステージ131に対して機械的に位置決めするための整列機構133aならびに133b、および、134aならびに134b(133a〜134b)を備える。整列機構133aおよび133bは、搬送ステージ131上の基板WをY軸に沿った方向から挟み込む位置に配置される。一方、整列機構134aおよび134bは、搬送ステージ131上の基板WをX軸に沿った方向から挟み込む位置に配置される。各整列機構133a〜134bは、たとえばシリンダとシリンダから突出可能な軸部材とからなり、この軸部材の先端で基板Wの側面を付勢することで、基板Wを搬送ステージ131に対して機械的に位置決めする。ただし、この他にも、段階的に軸部材を突出可能なステッピングモータなどを用いることも可能である。また、整列機構133a〜134bには、軸部材の突出量が2種類のうちから必要に応じて変化する、いわゆるON/OFFタイプのものを用いてもよいし、中間停止が可能な、すなわち、軸部材の突出量を3種類以上のうちから選択可能かもしくは連続的に変化可能なものを用いてもよい。なお、軸部材の突出量を3種類以上のうちから選択可能か、もしくは、連続的に変化可能な整列機構を用いた場合、基板Wを保持する保持機構136に代えて、整列機構を用いて基板Wを制止させておくことも可能である。
【0016】
さらに、基板ホルダ13は、基板Wを保持する保持機構136を備える。保持機構136は、基板Wを下面、上面および/または側面から吸着する吸着パッドを備える。この吸着パッドは、たとえば不図示の排気部に接続されており、この排気部の排気によって接触する基板Wを吸着する。これにより、基板Wが基板ホルダ13条に浮上した状態で保持機構136によって保持される。ただし、これに限定されず、基板Wの端部を把持するなど、基板Wを保持可能な構成であれば、種々変形することが可能である。
【0017】
さらにまた、基板ホルダ13は、基板Wを光学ユニット14と反対側から照明する透過照明138を備える。図4は、本実施の形態1による搬送ステージの概略構成を示す一部断面図である。図4に示すように、透過照明138は、隣り合う浮上プレート132の間に配置されている。この透過照明138は、面光源であることが好ましい。これにより、図4の照明領域R1と撮像領域R2とに示されるように、基板Wの撮像領域R2をムラなく照明することが可能となる。また、このような透過照明138は、たとえば蛍光灯、LED(Light Emitting Diode)、または、ハロゲンランプ等で構成することができる。
【0018】
さらにまた、基板ホルダ13は、たとえば図2および図3に示すように、基板Wを搬送ステージ131に対して浮上プレート132の配列方向、すなわちX方向に所定距離シフトさせるシフト機構135aおよび135bを備える。ここで、シフト機構135aおよび135bによる基板Wのシフト量と、浮上プレート132の幅(すなわち、X方向の長さ)と、隣接する浮上プレート132間の距離との関係について、図面を用いて詳細に説明する。図5は、本実施の形態1において浮上プレートの幅と隣接する浮上プレート間の距離とが等しい場合を説明するための模式図である。図6は、本実施の形態1において浮上プレートの幅が隣接する浮上プレート間の距離のn倍の場合を説明するための模式図である。
【0019】
たとえば、図5に示すように、浮上プレート132の幅L1と隣接する浮上プレート132間の距離L2とが等しい場合、シフト機構135aおよび135bは、基板Wの一度の移動の際に、浮上プレート132の幅L1分、基板WをX方向に移動させる。これにより、基板Wにおける透過照明138によって照明されていなかった領域を、あらたに照明することが可能となる。また、図6に示すように、浮上プレートの幅L1が隣接する浮上プレート132間の距離L2aのn倍である場合、シフト機構135aおよび135bは、X方向への距離L2aの移動をn回(nが自然数でない場合は小数点以下切り上げ)、繰り返す。これにより、基板Wにおける透過照明138によって照明されていなかった領域を複数回に分けて適宜照明することが可能となる。本実施の形態1では、以上のように、基板Wを必要に応じて浮上プレート132の配列方向にシフトさせることで、基板Wにおける素子形成領域全体を照明可能な領域とすることを可能にする。なお、基板Wをシフトさせた際、このシフト方向へ門型ステージ14を移動させてもよい。これにより、シフトさせた分の座標を機械的に補正することが可能となる。ただし、これに限定されず、シフトさせた分の座標をソフト的に補正してもよい。また、基板Wの一度のシフト量としては、浮上プレート132の幅(短手方向の長さ)のみならず、この幅に光学ユニット16における対物レンズの視野範囲を加えた値以上としてもよい。これにより、光学ユニット16の視野範囲全てを透過照明することが可能となる。
【0020】
つぎに、基板検査装置1を動作させる駆動機構について、図面を用いて詳細に説明する。図7は、本実施の形態1による基板検査装置の駆動機構の概略構成を示すブロック図である。図7に示すように、基板検査装置1は、全体の動作を制御する制御部101と、搬送ステージ131を駆動して基板Wを浮上させる搬送ステージ駆動部111と、外部の基板搬入機構から基板Wが搬入されたか否かを検知する基板搬入検知部112と、整列機構133a〜134bを駆動することで搬入された基板Wを搬送ステージ131に対して所定の位置に機械的にアライメントする整列機構駆動部113と、保持機構136を駆動して基板Wを保持/開放する保持機構駆動部114と、シフト機構135aおよび135bを駆動して基板WをX方向に所定距離シフトさせるシフト機構駆動部115と、移動機構18をX軸部材19に沿って移動させることで光学ユニット16を門型フレーム14ごとX方向に移動させる移動機構駆動部116と、光学ユニット16を駆動して基板Wを撮像する光学ユニット駆動部117と、透過照明138を駆動して基板Wを光学ユニット16と反対側から照明する透過照明駆動部118と、を備える。なお、基板搬入検知部112は、搬送ステージ131の基板搬入口に設けられた不図示のセンサからの信号に基づいて、基板Wが搬入されたか否かを検知する。また、光学ユニット16によって取得された画像は、たとえば制御部101によって解析され、欠陥などが検出される。
【0021】
また、基板検査装置1は、ユーザが各種設定や指示を入力する入力部102と、各種プログラムやパラメータ、ならびに、取得された画像データ等を適宜記憶する記憶部103と、取得/記憶された画像や各種情報を表示する表示部104と、外部との通信を制御する通信部105と、を備える。
【0022】
次に、本実施の形態1による基板検査方法を、図面を用いて詳細に説明する。図8は、本実施の形態1による基板検査方法の概略を示すフローチャートである。以下の説明では、図7に示す制御部101の動作に着目する。図8に示すように、本実施の形態1による基板検査方法では、制御部101は、まず、外部の基板搬入機構から基板Wが搬入されることの待機を開始する(ステップS101)。具体的には、制御部101は、搬送ステージ駆動部111を介して搬送ステージ131からエアを吹き出させる。つづいて、制御部101は、基板搬入検知部112によって基板Wの搬入が検知されたか否かを判定し(ステップS102)、基板Wの搬入が検知されるまで待機する(ステップS102のNo)。その後、基板Wの搬入が検知されると(ステップS102のYes)、制御部101は、整列機構駆動部112を介して整列機構133a〜134bを駆動することで、基板Wを搬送ステージ131の基準位置に対してアライメントとする(ステップS103)。
【0023】
つぎに、制御部101は、不図示のカウンタのカウント値kに0をセット(k=0)する(ステップS104)。つぎに、制御部101は、保持機構駆動部114を介して保持機構136を駆動することで、所定位置にアライメントされた基板Wを保持する(ステップS105)。つぎに、制御部101は、移動機構駆動部116を介して移動機構18を駆動することで、光学ユニット16を門型フレーム14ごとX方向に移動させるとともに、光学ユニット駆動部117を介して光学ユニット16を駆動することで、光学ユニット16をY方向に移動させて基板Wにおけるターゲットとする座標の画像を取得する基板検査処理を実行する(ステップS106)。なお、基板検査処理の詳細については、後述において説明する。
【0024】
つぎに、制御部101は、カウント値kが予め設定された値nであるか否か(k=n)を判定し(ステップS107)、k=nである場合(ステップS107のYes)、処理を終了する。なお、たとえば浮上プレート132の幅L1が隣接する浮上プレート132間の距離L2と等しい場合、値nはたとえば1であり、たとえば浮上プレート132の幅L1が隣接する浮上プレート132間の距離の5倍である場合、値nは5である。
【0025】
ステップS107の判定の結果、k≠nである場合(ステップS107のNo)、制御部101は、保持機構駆動部114を介して保持機構136を駆動することで、基板Wの保持を解除(開放)し(ステップS108)、つづいて、シフト機構駆動部115を介してシフト機構135aおよび135bを駆動することで、基板WをX方向に所定距離(たとえばL2)移動させる(ステップS109)。この際、基板WのY方向への移動は、基板WをY軸に沿った方向から挟み込む整列機構133aおよび133bによって制限されているとよい。なお、整列機構133aおよび133bには、アライメント時に基板Wが嵌まる溝が形成されていてもよい。また、整列機構133aおよび133bは、基板Wと接触する面の向きが回転可能であってもよい。これにより、基板WがX−Y平面内において所望する方向に対して回転している場合でも、基板Wを傷つけずに所望する方向へ整列させることが可能となる。また、基板WのX方向へのシフトには、シフト機構135aおよび135bの代わりに保持機構136を用いてもよい。この場合、シフト機構駆動部115ならびにシフト機構135aおよび135bの構成に加えて、図8のステップS108の動作を省略することができる。
【0026】
つぎに、制御部101は、カウント値kを1つインクリメント(k=k+1)し(ステップS110)、その後、ステップS105へ帰還する。制御部101は、以上のようにして、n回、基板Wをシフトさせつつ検査を行うことで、基板W全体に対する基板検査を実行する。
【0027】
つぎに、図8のステップS106に示す基板検査処理について、図面を用いて詳細に説明する。図9は、本実施の形態1による基板検査処理の概略を示すフローチャートである。図9に示すように、基板検査処理では、制御部101は、まず、たとえば記憶部103等の記憶領域に記憶されている検査対象位置を示す座標(以下、ターゲット座標という)を読み取る(ステップS121)。なお、ターゲット座標は、たとえば欠陥や検査パターンなどの検査対象の座標である。このターゲット座標は、たとえば基板Wにおける特定の位置(たとえばアライメントマーク位置)を基準とした座標系に、搬送ステージ13に設定された座標系や光学ユニット16の座標系を加味することで求めることが可能である。また、ターゲット座標は、たとえばキーボードやマウスやジョイスティックなどの入力部102からユーザが適宜入力した座標であってもよい。
【0028】
つぎに、制御部101は、現在の搬送ステージ131に対する基板Wの位置に基づいて、ステップS121において特定したターゲット座標のうち検査可能なターゲット座標を選別する(ステップS122)。具体的には、制御部101は、基板Wと基板Wに対する搬送ステージ131の各浮上プレート132の位置とから、浮上プレート132の上方に位置しないターゲット座標、すなわち透過照明138上の領域に含まれるターゲット座標を特定し、これを選別する。また、制御部101は、ステップS121において特定したターゲット座標のうちステップS122において選別されなかったターゲット座標をたとえば記憶部103等に保存しておく(ステップS123)。
【0029】
つぎに、制御部101は、ステップS122において選別されたターゲット座標のうち1つを選択し(ステップS124)、このターゲット座標上に光学ユニット16が位置するように、移動機構18を駆動して門型フレーム14をX方向に移動させる(ステップS125)と共に、光学ユニット15をY方向に移動させる(ステップS126)。ただし、基板Wの座標系と、門型フレーム14を移動させる移動機構18の座標系と、光学ユニット16の移動における座標系とは、必ずしも一致するとは限らない。そこで、制御部101は、光学ユニット16を確実にターゲット座標上へ移動させるために、たとえばステップS125およびS126において、座標系の補正を行うとよい。また、ターゲット座標の選択の順序は、たとえば、X座標の小さい若しくは大きい順であって、Y座標の小さい若しくは大きい順など、種々の選択方法を用いることができる。この際、門型フレーム14および/または光学ユニット16の移動距離が最短距離になるよう順序でターゲット座標を選択することで、基板検査のタクトタイムをより短縮することが可能となる。
【0030】
以上のようにして光学ユニット16をターゲット座標上に移動させると、つぎに制御部101は、光学ユニット16を駆動することで、基板Wにおけるターゲット座標を含む領域を撮像し(ステップS127)、これにより取得された画像を記憶部103等に保存する(ステップS128)。
【0031】
その後、制御部101は、ステップS122において選別した全てのターゲット座標に対する処理が完了したか否かを判定し(ステップS129)、完了した場合(ステップS129のYes)、図8に示す処理へリターンする。一方、完了していない場合(ステップS129のNo)、制御部101は、ステップS124へ帰還し、未選択のターゲット座標のうち1つを選択して、以降の動作を実行する。
【0032】
以上のように、本実施の形態1によれば、浮上プレート132などの影となって照明されていなかった領域を、基板Wを移動させて照明し直すことが可能である。これにより、大型の基板に対しても正確な検査が可能となる。
【0033】
(変形例1)
ここで、上述した搬送ステージの変形例1を、以下に図面を用いて詳細に説明する。図10は、本変形例1による搬送ステージの概略構成を示す一部断面図である。図10に示すように、本変形例1では、透過照明138の代わりに、光拡散板239が隣り合う浮上プレート132の間に配置されている。また、搬送ステージ131の下方に、蛍光灯、LED(Light Emitting Diode)、または、ハロゲンランプ等の光源238が配置されている。光拡散板239とは、図10の照明領域R1に示されるように、光源238からの光を拡散しつつ透過させる。この結果、面光源である透過照明138を用いた場合と同様に、基板Wの撮像領域R2をムラなく照明することが可能となる。言い換えれば、光源238および光拡散板239は、組み合わされることで面光源として機能する。このように、本実施の形態1による透過照明は、実質的に基板Wを大きさを持って照明することが可能な光源であれば、如何なるものも含まれる。本説明では、この光源を面光源という。また、光拡散板と搬送ステージの高さを略同一にすることで、各搬送ステージの間隔が広くても基板の撓みを防止することが可能になる。また、光拡散板と浮上プレートの間に隙間を設けることで空気溜まりを防止することも可能になる。
【0034】
(変形例2)
また、上述した搬送ステージの他の変形例2を、以下に図面を用いて詳細に説明する。図11は、本変形例2による搬送ステージの概略構成を示す一部断面図である。図11に示すように、本変形例2による搬送ステージ332は、上部に帯状の凸部332aを複数備えた板状の部材よりなる。凸部332aの上面には、浮上プレート132と同様に、エアを吹き出すことが可能な複数の穴が設けられている。透過照明138は、隣り合う凸部332aの間に配置される。これにより、上述の実施の形態1または変形例1と同様に、板Wの撮像領域R2をムラなく照明することが可能となる。
【0035】
なお、上記した実施の形態1および変形例では、基板検査装置にラインスキャン系またはレビュー系の光学ユニットを搭載した場合を例に挙げたが、これに限定されず、その両方を基板検査装置に搭載してもよい。
【0036】
また、上述した実施の形態1では、浮上プレート132がX方向に配列した場合を例に挙げたが、これに限定されず、Y方向に配列していてもよい。この場合、シフト機構135aおよび135bは、Y方向に基板Wを所定距離シフトさせる。なお、この場合、整列機構133aおよび133aと整列機構134aおよび134bとが入れ代わる。
【0037】
(実施の形態2)
つぎに、本発明の実施の形態2による基板検査装置および基板検査方法を、図面を参照して詳細に説明する。本実施の形態2による基板検査装置は、上述した実施の形態1による基板検査装置1と同様である。ただし、本実施の形態2では、基板検査方法が、図12に示す基板検査方法に置き換えられる。
【0038】
図12に示すように、本実施の形態2による基板検査方法では、図8のステップS101〜S110と同様の行程を経た後、ステップS109で基板Wをシフトした後の撮像領域または照明領域にターゲット座標が含まれるか否かを判定する(ステップS201)。この判定の結果、シフト後の領域にターゲット座標が含まれている場合(ステップS201のYes)、制御部101は、ステップS105へ帰還し、移行の動作を実行する。一方、シフト後の領域にターゲット座標が含まれていない場合(ステップS201のNo)、制御部101は、カウント値kが値nであるか否か(k=n)を判定し(ステップS202)、k=nである場合(ステップS202のYes)、処理を終了する。一方、k≠nである場合(ステップS202のNo)、制御部101は、ステップS109へ移行する。これにより、ターゲットとなる欠陥が存在しない領域についての基板検査処理S106をスキップすることが可能となる。これを、図13に例示するケースを用いて説明する。
【0039】
図13は、本実施の形態2による基板検査方法におけるシフト動作の概略を説明するための図である。なお、図13に示す例では、基板Wの総シフト回数nを2回とし、シフト回数k=0のときの撮像領域を領域A1〜A6とし、シフト回数k=1のときの撮像領域を領域B1〜B5とし、シフト回数k=2のときの撮像領域を領域C1〜C5とする。また、領域A1〜A6、B1〜B5およびC1〜C5のうち、図13において斜線のハッチングにて示す領域A1、A3、A4、C2、C4およびC5には、欠陥座標などのターゲット座標が含まれ、それ以外にはターゲット座標が含まれないとする。この例では、シフト回数n=1のときの撮像領域である領域B1〜B5の全てにターゲット座標が含まれていない。そこで本実施の形態2では、シフト回数k=1の際にシフト後の領域にターゲット座標が含まれていないとして(図12のステップS201のNo)、領域B1〜B5に対する基板検査処理(ステップS106)をスキップし、基板Wをさらにシフトさせる(ステップS109)。これにより、撮像領域にターゲット座標が存在しない際の基板検査処理を省略できるため、基板検査におけるタクトタイムを短縮することが可能となる。
【0040】
なお、その他の構成および動作は、上述の実施の形態1またはその変形例と同様であるため、ここでは詳細な説明を省略する。
【0041】
また、上記実施の形態およびその変形例は本発明を実施するための例にすぎず、本発明はこれらに限定されるものではなく、仕様等に応じて種々変形することは本発明の範囲内であり、更に本発明の範囲内において、他の様々な実施の形態が可能であることは上記記載から自明である。例えば各実施の形態に対して適宜例示した変形例は、他の実施の形態に対して適用することも可能であることは言うまでもない。
【符号の説明】
【0042】
1 基板検査装置
11 ベースフレーム
12 ステージ
13 基板ホルダ
14 門型フレーム
15 Y軸部材
16 光学ユニット
17、18 移動機構
19 X軸部材
101 制御部
102 入力部
103 記憶部
104 表示部
105 通信部
111 搬送ステージ駆動部
112 基板搬入検知部
113 整列機構駆動部
114 保持機構駆動部
115 シフト機構駆動部
116 移動機構駆動部
117 光学ユニット駆動部
118 透過照明駆動部
131、332 搬送ステージ
132 浮上プレート
133a、133b、134a、134b 整列機構
135a、135b シフト機構
136 保持機構
138 透過照明
238 光源
239 光拡散板
332a 凸部
W 基板
【特許請求の範囲】
【請求項1】
基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージと、
前記基板搬送面より下方に配置され、隣り合う前記プレートの間から前記基板を照明する面光源と、
前記ステージの上方を該ステージに対して水平に移動可能な光学ユニットと、
前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動部と、
を備えたことを特徴とする基板検査装置。
【請求項2】
前記基板移動部は、前記所定幅分、前記基板を移動させることを特徴とする請求項1に記載の基板検査装置。
【請求項3】
前記面光源は、前記隣り合うプレートの間に配置されていることを特徴とする請求項1または2に記載の基板検査装置。
【請求項4】
前記面光源は、前記ステージよりも下方に配置された光源と、前記隣り合うプレートの間に配置された光拡散部と、を備えたことを特徴とする請求項1または2に記載の基板検査装置。
【請求項5】
前記プレートは、前記基板搬送面を形成する面にエアを吹き出すことが可能な複数の穴を備えたことを特徴とする請求項1〜4のいずれか一つに記載の基板検査装置。
【請求項6】
基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージ上に載置された基板を前記基板搬送面より下方に配置された面光源を用いて照明しつつ検査する基板検査方法であって、
隣り合う前記プレートの間の領域上に位置する基板の1つ以上の領域を検査する検査ステップと、
前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動ステップと、
を含むことを特徴とする基板検査方法。
【請求項7】
前記基板移動ステップは、前記所定幅分、前記基板を移動させることを特徴とする請求項6に記載の基板検査方法。
【請求項8】
前記基板移動ステップは、前記所定幅に前記光学ユニットにおける対物レンズの視野範囲を加えた長さ以上、前記基板を移動させることを特徴とする請求項6に記載の基板検査方法。
【請求項9】
前記基板移動ステップは、前記所定距離移動後の前記隣り合うプレートの間の領域上に位置する基板の1つ以上の領域に検査対象が含まれない場合、前記基板を前記短手方向にさらに前記所定距離移動させることを特徴とする請求項6〜8のいずれか一つに記載の基板検査方法。
【請求項1】
基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージと、
前記基板搬送面より下方に配置され、隣り合う前記プレートの間から前記基板を照明する面光源と、
前記ステージの上方を該ステージに対して水平に移動可能な光学ユニットと、
前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動部と、
を備えたことを特徴とする基板検査装置。
【請求項2】
前記基板移動部は、前記所定幅分、前記基板を移動させることを特徴とする請求項1に記載の基板検査装置。
【請求項3】
前記面光源は、前記隣り合うプレートの間に配置されていることを特徴とする請求項1または2に記載の基板検査装置。
【請求項4】
前記面光源は、前記ステージよりも下方に配置された光源と、前記隣り合うプレートの間に配置された光拡散部と、を備えたことを特徴とする請求項1または2に記載の基板検査装置。
【請求項5】
前記プレートは、前記基板搬送面を形成する面にエアを吹き出すことが可能な複数の穴を備えたことを特徴とする請求項1〜4のいずれか一つに記載の基板検査装置。
【請求項6】
基板を支持する基板搬送面を形成する複数のプレートが短手方向に互いに所定幅の隙間を空けて配列するステージ上に載置された基板を前記基板搬送面より下方に配置された面光源を用いて照明しつつ検査する基板検査方法であって、
隣り合う前記プレートの間の領域上に位置する基板の1つ以上の領域を検査する検査ステップと、
前記ステージ上の前記基板を前記短手方向に所定距離移動させる基板移動ステップと、
を含むことを特徴とする基板検査方法。
【請求項7】
前記基板移動ステップは、前記所定幅分、前記基板を移動させることを特徴とする請求項6に記載の基板検査方法。
【請求項8】
前記基板移動ステップは、前記所定幅に前記光学ユニットにおける対物レンズの視野範囲を加えた長さ以上、前記基板を移動させることを特徴とする請求項6に記載の基板検査方法。
【請求項9】
前記基板移動ステップは、前記所定距離移動後の前記隣り合うプレートの間の領域上に位置する基板の1つ以上の領域に検査対象が含まれない場合、前記基板を前記短手方向にさらに前記所定距離移動させることを特徴とする請求項6〜8のいずれか一つに記載の基板検査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−21881(P2012−21881A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−159899(P2010−159899)
【出願日】平成22年7月14日(2010.7.14)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月14日(2010.7.14)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]