
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は基板検査装置及び検査方法に関わり、より詳細にはプリント回路基板上に部品を装着する時、ターミナルと半田とを明確に区分することのできる基板検査装置及び検査方法に関する。
【背景技術】
【0002】
一般的に、3次元形状測定装置は、測定対象物の3次元形状を測定するために測定対象物上に格子パターン光を照射し、格子パターン光による反射光を撮影する。3次元形状測定装置は、一般的にステージ、カメラ、照明ユニット、中央処理部等を含む。
【0003】
一般的に、プリント回路基板上に半導体部品が実装された実装基板は多様な電子製品に使われている。このような実装基板を製造する際に、半導体部品のターミナル(terminal)はプリント回路基板のパッド上に半田付けされる。
【0004】
このように実装された半導体部品は、プリント回路基板に確実に半田付けされたかを検査する必要がある。このような実装基板の検査の際に、半導体部品の検査精度を高めるために半導体部品のターミナル領域と半田領域とを明確に区分することが重要である。
【0005】
従来には、前記のような領域区分のために2次元照明を利用して2次元画像を取得していた。しかし、2次元画像を用いてターミナル領域と半田領域とを区別することは、各領域の色が類似し、照明に敏感であるため区別しにくく、カメラのノイズの影響を大きく受けて各領域の明確な区別が行われないという問題点があった。
【0006】
また、2次元照明を利用してターミナル領域と半田領域との境界部分を明確に区分するためには、コントラスト(contrast)を向上させる必要がある。しかし、従来の実装基板検査装置では、2次元照明のコントラストを向上させるのに限界があるため、半導体部品のターミナル領域と半田領域とを明確に区分することは困難であるという問題がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、前記問題に鑑みてなされたものであり、実装基板に実装された半導体部品のターミナル領域と半田領域とを明確に区分して検査の信頼性を向上させることが可能な基板検査装置を提供することにある。
【0008】
また、本発明の目的は、実装基板に実装された半導体部品のターミナル領域とソルダー領域とを明確に区分することができる基板検査方法を提供することにある。
【課題を解決するための手段】
【0009】
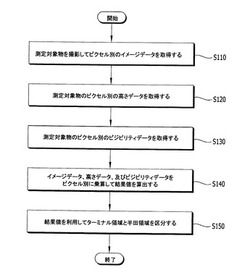
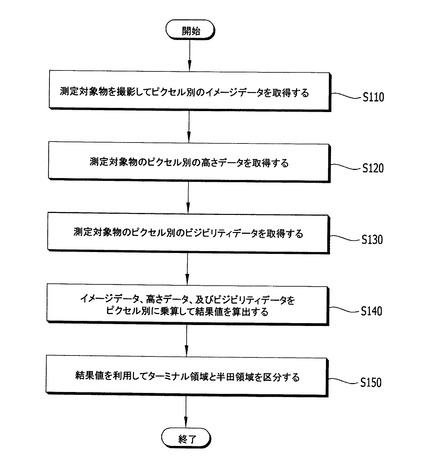
本発明の一実施形態に係る検査方法は、測定対象物を撮影して前記測定対象物の各ピクセルのイメージデータを取得し、前記測定対象物のピクセル別に高さデータを取得し、前記測定対象物のピクセル別にビジビリティ(visibility)データを取得し、前記取得された前記イメージデータと、前記ピクセル別の前記高さデータ及び前記ビジビリティデータのうち少なくとも1つとを乗算して結果値を算出し、前記算出された結果値を利用してターミナル領域を設定すること、を含む。
【0010】
前記結果値は、前記ピクセル別に前記イメージデータと前記高さデータと前記ビジビリティデータとを乗算して算出されてもよい。前記ビジビリティデータは、前記ピクセル別に撮影された画像の明度(intensity)における平均(Ai(x,y)))に対する振幅(Bi(x,y))の比率(Vi(x,y)=Bi(x,y)/Ai(x,y)としてもよい。
【0011】
前記測定対象物の各ピクセルに対する前記高さデータ及び前記ビジビリティデータを取得することは、格子パターン光をN回前記測定対象物上に投射し、前記測定対象物上にN回投射された前記格子パターン光により反射イメージデータをN回取得し、前記取得されたN個の反射イメージデータを利用して前記高さデータを取得し、前記反射イメージデータを利用して前記ビジビリティデータを取得すること、を含んでもよい。
【0012】
前記検査方法は、前記測定対象物上に投射された前記格子パターン光により反射イメージデータをN回取得した後、前記N個の反射イメージデータを平均化して前記イメージデータを取得すること、を更に含んでもよい。
【0013】
前記測定対象物は複数の方向から撮影され、前記測定対象物の前記ピクセル別イメージデータ、前記ピクセル別高さデータ、及び前記ピクセル別ビジビリティデータは、前記複数の方向から取得されてもよい。前記ピクセル別の前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して前記結果値を算出することは、前記ピクセル別の前記複数の方向のイメージデータからイメージデータ最大値を選択し、前記ピクセル別の前記複数の方向の高さデータから高さデータ最大値を選択し、前記ピクセル別の前記複数の方向のビジビリティデータからビジビリティデータ最大値を選択し、前記ピクセル別に選択された前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値を乗算して前記結果値を算出すること、を含んでもよい。前記ピクセル別に取得された前記イメージデータと、前記高さデータ、及び前記ビジビリティデータのうち少なくとも1つとを乗算して前記結果値を算出することは、前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きいか否かを確認することを更に含んでもよい。
【0014】
本発明の他の実施形態に係る検査方法は、複数のM個の方向に格子パターン光を測定対象物にN回ずつ照射して前記測定対象物のピクセル別にM×N個のイメージデータ、M個の高さデータ、及びM個のビジビリティデータを取得し(NとMは、2以上の自然数)、前記M×N個のイメージデータのうち、M個の方向別にN個のイメージデータをそれぞれ平均化して、前記ピクセル別に前記M個の方向に対応するM個の平均イメージデータを算出し、前記ピクセル別に前記M個の平均イメージデータから平均イメージデータ最大値を選択し、前記ピクセル別に前記M個の高さデータから高さデータ最大値を選択し、前記ピクセル別に前記M個のビジビリティデータからビジビリティデータ最大値を選択し、前記ピクセル別に選択された前記平均イメージデータ最大値、前記高さデータ最大値、前記ビジビリティデータ最大値を前記ピクセル別に乗算して結果値を算出し、前記算出された結果値を利用してターミナル領域を区分すること、を含む。
【0015】
前記算出された結果値を利用して前記ターミナル領域を区分することは、前記ピクセル別に算出された結果値を少なくとも2つのグループに分類し、同一のグループに属するピクセルは、連続して分布するようにし、前記分類されたグループを利用して前記半田領域から前記ターミナル領域を区分すること、を含んでもよい。
【0016】
本発明の更に他の実施形態に係る基板検査装置は、基板を移送するステージと、前記基板を調整するための光を検査対象上に照射する第1照明部と、前記基板の高さデータを取得するための格子パターン光を前記検査対象物上に投射する投射部と、前記基板に実装された部品のターミナル領域を設定するための光を前記検査対象物上に照射する第2照明部と、前記第2照明部より前記基板の近くに配置された第3照明部と、前記第2照明部の光の照射によって前記基板の第1イメージを撮影し、前記投射部の格子パターン光の照射によって前記基板の第2イメージを撮影する画像撮影部と、前記画像撮影部で撮影された前記第1イメージ及び前記第2イメージを利用して前記ターミナル領域を区分する制御部と、を含む。
【0017】
前記第2照明部は、前記画像撮影部と前記投射部との間に設置されてもよい。前記第2照明部は、前記基板の平面に垂直な法線に対して約17゜〜約20゜の角度範囲に光を照射してもよい。
【0018】
前記制御部は、前記第2イメージから取得されたビジビリティデータ及び高さデータのうち少なくとも一つと、前記第1イメージから取得されたイメージとを利用してコントラストマップを生成し、前記コントラストマップを分析して前記ターミナル領域を区分してもよい。
【0019】
前記投射部は、前記基板上に格子パターン光をN回投射し、前記画像撮影部は前記基板にN回投射された格子パターン光を撮影してもよい。前記ビジビリティデータは、前記画像撮影部によって撮影された画像の明るさにおいて平均(Ai(x,y))に対する振幅(Bi(x、y))の比率(Vi(x,y)=Bi(x,y)/Ai(x,y))としてもよい。前記投射部は、前記基板上に異なる方向から格子パターン光を投射する複数の投映部であってもよく、前記制御部は、前記複数の投射部による複数の高さデータ及び複数のビジビリティデータを取得してもよい。前記制御部は、前記複数の高さデータの最大値、前記複数のビジビリティデータの最大値、及び前記イメージデータを乗算して前記コントラストマップを生成してもよい。
【0020】
本発明の更に他の実施形態に係る基板検査方法は、ステージの移送によって基板を測定位置に移送し、第1光を前記基板上に照射して前記基板を調整し、画像撮影部と投射部との間から第2光を前記基板上に照射して前記基板の第1イメージを撮影し、前記投射部の格子パターン光を前記基板上にN回照射して前記基板の第2イメージを撮影し、前記第2イメージからビジビリティデータ及び高さデータを取得し、前記第1イメージ、前記ビジビリティデータ、及び前記高さデータを利用してコントラストマップを生成し、前記コントラストマップを利用して前記基板に実装された部品のターミナル領域を区分すること、を含む。
【発明の効果】
【0021】
本発明によれば、測定対象物のイメージデータ、高さデータ、及びビジビリティデータを取得し、取得されたデータを乗算して結果値を算出し、結果値を利用してターミナル領域と半田領域を区分することで、より正確にターミナル領域を確定することができ、より精密に前記ターミナルを検査することができる。
【0022】
また、高さに基づいた3次元的データを利用してターミナル領域を確定するため、2次元画像を利用してターミナル領域を確定する場合に比べて、各領域の色による影響を少なくし、照明に対しても敏感でないため、より正確かつ容易に各領域を区別することができ、カメラのノイズの影響も低減できる。
【0023】
また、前記イメージデータは3次元的データを利用して取得される場合、2次元イメージデータを取得しなくてもターミナル領域を容易に確定することができる。
【0024】
また、画像撮影部と隣接するように設置された第1照明部と、視野における輝度均一性を向上させるために画像撮影部と投射部との間にリング形状の第2照明部を追加設置して視野角内のコントラストの均一性を向上させ、前記第2照明部の照射角度を投射部より小さく設定して撮影されたイメージのコントラストを向上させることができる。よって、投射部を利用して得られたイメージと第2照明部を利用して得られたイメージとを組み合わせて検査対象物に形成されたターミナル領域と半田領域とを明確に区分し、検査の信頼性を向上させることができる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態に係る3次元形状測定方法に用いられる3次元形状測定装置を示す概略図である。
【図2】本発明の一実施形態に係るターミナル検査方法を示すフローチャートである。
【図3】プリント回路基板上に形成されたターミナルと半田の一例を示す概略図である。
【図4】図2のターミナル検査方法による結果値を算出する一例を示すフローチャートである。
【図5】本発明の一実施形態に係る実装基板検査装置を示す概略図である。
【図6】図5に示した実装基板検査装置を上側から見た平面図である。
【図7】図5に示した投射部及び第2照明部の位置関係を示す概略図である。
【図8】検査対象物のターミナル領域と半田領域とを区分する過程を示す平面図である。
【図9】本発明の一実施形態に係る実装基板検査方法を示すフローチャートである。
【発明を実施するための形態】
【0026】
本発明は多様に変更することができ、多様な形態を有することができるが、ここでは、特定の実施形態を図面に例示して詳細に説明する。但し、ここでの記載は、本発明を特定の開示形態に限定するものではなく、本発明の権利範囲は、本発明の思想及び技術範囲に含まれる全ての変更、均等物、乃至代替物を含むことを理解すべきである。
【0027】
構成要素、又は、層が、他の構成要素、又は、層“の上に(on)”、“に接続され(connected to)”、又は、“に結合され(coupled to)”とされる場合は、その構成要素、又は、層は、他の構成要素、又は、層、又は、構成要素の中、又は、層間に、直接的に、接続されるか、又は、結合されることを理解すべきである。一方、構成要素が、他の構成要素、又は、層、“の直上に(directly on)”、“に直接接続され(directly connected to)”、又は、“に直接結合され(directly coupled to)”とされる場合は、その構成要素は他の構成要素の中、又は、層間にはない。構成要素全般に亘って数字が参照される。ここで用いられるように、用語“及び/又は(and/or)”は、掲載された関連事項の1つ以上の全ての組み合わせが含まれる。
【0028】
また、第1、第2、第3等の用語は、多様な構成要素、部品、領域、層、及び/又は、部を説明するために使用することができるが、これらの構成要素、部品、領域、層、及び/又は、部は用語によって限定されない。これらの用語は一つの構成要素、部品、領域、層、又は、部を他の領域、層、又は、部から区別する目的としてのみ使用される。例えば、本発明の権利範囲から逸脱することなしに、第1の構成要素、部品、領域、層、又は、部は、第2の構成要素、部品、領域、層、又は、部と称されてもよく、同様に第2の構成要素、部品、領域、層、及び/又は、部も第1の構成要素、部品、領域、層、及び/又は、部に称されてもよい。
【0029】
空間に関連する要件として、“下方に(beneath)”、“下方に(below)”、“下側の(lower)”、“上側に(above)”、“上方の(upper)”等は、図に示される一つの要件又は特徴と他の要件又は特徴の関係を開示する説明を容易にするために、以下で使用される。空間に関連する要件は、図において表現される動作に加えて、使用中又は動作中の装置の異なる動作を含むことを理解すべきである。例えば、図において装置が回転すれば、他の要件又は特徴の“下方に(beneath)”又は“下方に(below)”として表される要素は、その他の要件又は特徴の“上側に(above)”に配置される。このように、典型的な用語“下方に(below)”は、“上側に(above)”及び“下方に(below)”の両方向を含めることができる。装置は、他に配置される(90°又は他方向に回転される)こと、及びここで用いられる空間に関連する記述は、適宜解釈される。
【0030】
ここで用いられる技術用語は、特定の実施の形態のみを記述する目的であり、本発明を制限するものではない。ここで用いられる単数形“a”、“an”及び“the”は、前後関係が明らかにされない限り、複数形も含むものとする。更に、用語“構成する(comprises)”及び/又は“構成する(comprising)”が本明細書において用いられる場合、規定された特徴、整数、ステップ、動作、要素、及び/又は構成要素の存在を示すが、一つ以上の他の特徴、整数、ステップ、動作、構成要素、及び/又はそのグループの存在または追加を排除するものではない。
【0031】
本発明の一実施形態は、本発明の理想化した一実施形態の概略図(中間構造)である断面図を参照して説明する。その結果として、図面の形状からの変形例は、例えば、製造技術、及び/又は、許容範囲が予想される。その結果、本発明の一実施の形態は、ここに図示した範囲の特定の形状に限定して解釈されるものではなく、例えば、製造から生じる形状から逸脱するものも含まれる。例えば、長方形として図示された挿入部は、一般的にその端部が非挿入部に挿入されてから二元変更されるよりむしろ、挿入部の円くなった、又は湾曲した特徴、及び/又は、勾配を有している。同様に、挿入により形成される埋設領域は、埋設領域と表面との間の領域で行われる挿入の結果である。図形において図示された領域は、事実上の概要であり、それらの形状は装置の領域の実質的な形状を図示することを目的とするものではなく、本発明の範囲を制限することを目的とするものではない。
【0032】
本発明において用いた用語は、特定の実施例を説明するためのものであって、本発明を限定するのではない。単数の表現は、文脈上、明白に相違が示されない限り、複数の表現を含む。
【0033】
本発明において、「含む」または「有する」等の用語は、明細書上に記載された特徴、数字、ステップ、動作、構成要素、部品、又はこれらを組み合わせたものが存在することを意図するものであって、一つまたはそれ以上の他の特徴や数字、ステップ、動作、構成要素、部品、又はこれらを組み合わせたもの等の存在または付加の可能性を予め排除しないことを理解しなければならない。
【0034】
なお、異なるものとして定義しない限り、技術的であるか科学的な用語を含めてここで利用される全ての用語は、本発明が属する技術分野において通常の知識を有する者によって一般的に理解されるものと同一の意味を有している。一般的に利用される辞典に定義されているもののような用語は、関連技術の文脈上で有する意味と一致する意味を有することと解釈すべきであり、本発明において明白に定義されない限り、過度に形式的な意味には解釈されない。
【0035】
以下、添付図面を参照して本発明の好適な実施形態について詳細に説明する。
【0036】
図1は、本発明の一実施形態に係る3次元形状測定方法に用いられる3次元形状測定装置を示す概略図である。
【0037】
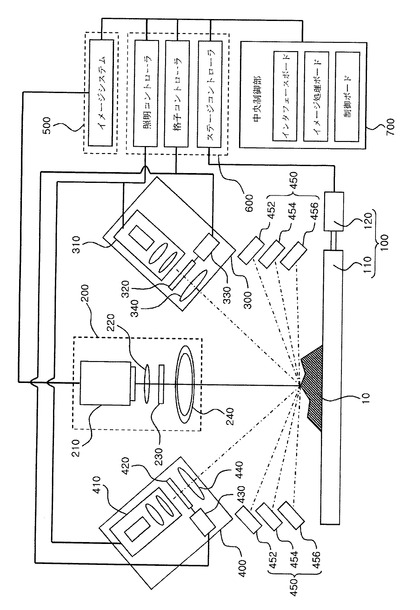
図1を参照すると、本発明の一実施形態に係る3次元形状測定方法に用いられる3次元形状測定装置は、測定ステージ部100、画像撮影部200、第1及び第2投射部(300、400)を含む第1照明ユニット、第2照明ユニット450、画像取得部500、モジュール制御部600、及び中央制御部700を含む。
【0038】
前記測定ステージ部100は、測定対象物10を支持するステージ110及び前記ステージ110を移送させるステージ移送ユニット120を含む。本実施形態では、前記ステージ110によって前記測定対象物10が前記画像撮影部200と前記第1及び第2投射部(300、400)に対して移動するによって、前記測定対象物10における測定位置が変更される。
【0039】
前記画像撮影部200は、前記ステージ110の上部に配置され、前記測定対象物10から反射された光を受けて前記測定対象物10の画像を測定する。すなわち、前記画像撮影部200は、前記第1及び第2投射部(300、400)で出射されて前記測定対象物10から反射された光を受け、前記測定対象物10の平面画像を撮影する。
【0040】
前記画像撮影部200は、カメラ210、結像レンズ220、フィルタ230、及びランプ240を含む。前記カメラ210は、前記測定対象物10から反射される光を受けて前記測定対象物10の平面画像を撮影する。前記カメラ210は、例えば、CCDカメラやCMOSカメラのいずれか一つを含む。前記結像レンズ220は、前記カメラ210の下部に配置され、前記測定対象物10で反射される光を前記カメラ210に結像させる。前記フィルタ230は、前記結像レンズ220の下部に配置され、前記測定対象物10で反射される光を透過させて前記結像レンズ220に提供する。前記フィルタ230は、例えば、周波数フィルタ、カラーフィルタ、及び光強度調節フィルタのいずれか一つが含まれる。前記ランプ240は、前記フィルタ230の下部に円形状に配置され、前記測定対象物10の2次元形状のような特定画像を撮影するために前記測定対象物10に光を提供する。
【0041】
前記第1投射部300は、例えば、前記画像撮影部200の右側に前記測定対象物10を支持する前記ステージ110に対して傾くように配置される。前記第1投射部300は、第1光源ユニット310、第1格子ユニット320、第1格子移送ユニット330、及び第1集光レンズ340を含む。前記第1光源ユニット310は、光源と少なくとも一つのレンズとで構成されて光を発生し、前記第1格子ユニット320は、前記第1光源ユニット310の下部に配置されて前記第1光源ユニット310で発生された光を格子パターンを有する第1格子パターン光に変更する。前記第1格子移送ユニット330は、前記第1格子ユニット320と連結されて前記第1格子ユニット320を移送し、例えば、PZT(Piezoelectric)移送ユニットや精密直線移送ユニットのいずれか一つが含まれる。前記第1集光レンズ340は、前記第1格子ユニット320の下部に配置されて前記第1格子ユニット320から出射された前記第1格子パターン光を前記測定対象物10に集光させる。
【0042】
前記第2投射部400は、例えば、前記画像撮影部200の左側に前記測定対象物10を支持する前記ステージ110に対して傾くように配置される。前記第2投射部400は、第2光源ユニット410、第2格子ユニット420、第2格子移送ユニット430、及び第2集光レンズ440を含む。前記第2投射部400は、上述した前記第1投射部300と実質的に同一であるため、詳細な説明は省略する。
【0043】
前記第1格子移送ユニット330は、前記第1格子ユニット320をN回順次移動させて前記第1投射部300において前記測定対象物10上にN個の第1格子パターン光が照射される時、前記画像撮影部200は前記測定対象物10で反射された前記N個の第1格子パターン光を順次受光してN個の第1パターン画像を撮影する。また、前記第2格子移送ユニット430は、前記第2格子ユニット420をN回順次移動させて前記第2投射部400において前記測定対象物10上にN個の第2格子パターン光が照射される時、前記画像撮影部200は前記測定対象物10で反射された前記N個の第2格子パターン光を順次受光してN個の第2パターン画像を撮影する。ここで、前記Nは自然数であって、例えば、4であってもよい。
【0044】
本実施形態では、前記第1及び第2格子パターン光を発生させる照明装置として前記第1及び2投射部(300、400)のみを説明したが、前記投射部は3台以上であってもよい。すなわち、前記格子パターン光は、多様な方向から前記測定対象物10上に照射されてもよく、多様なパターン画像が撮影されてもよい。例えば、3台の投射部が前記画像撮影部200を中心にして正三角形の形態に配置される場合、3つの格子パターン光が互いに異なる方向から前記測定対象物10上に照射されてもよい。例えば、4台の投射部が前記画像撮影部200を中心に正四角形の形態に配置される場合、4つの格子パターン光が互いに異なる方向から前記測定対象物10上に照射されてもよい。また、前記第1照明ユニットは、8台の投射部を含んでもよく、画像を撮影するために格子パターン光を8つの方向から前記測定対象物10上に照射してもよい。
【0045】
前記第2照明ユニット450は、前記測定対象物10の2次元的画像を取得するための光を前記測定対象物10上に照射する。本実施形態では、前記第2照明ユニット450は、赤色照明452、緑色照明454、及び青色照明456を含んでもよい。例えば、前記赤色照明452、前記緑色照明454、及び前記青色照明456は、前記測定対象物10にそれぞれ赤色光、緑色光、及び青色光を照射するために前記測定対象物10の上部で円形状に配置されてもよく、図1に示すように異なる高さに配置されてもよい。
【0046】
前記画像取得部500は、前記画像撮影部200のカメラ210と電気的に接続され、前記カメラ210から前記第1照明ユニットによるパターン画像を取得して保存する。また、前記画像取得部500は、前記カメラ210から前記第2照明ユニット450による2次元的画像を取得して保存する。例えば、前記画像取得部500は、前記カメラ210で撮影された前記N個の第1パターン画像及び前記N個の第2パターン画像を受けて保存するイメージシステムを含んでもよい。
【0047】
前記モジュール制御部600は、前記測定ステージ部100、前記画像撮影部200、前記第1投射部300、及び前記第2投射部400と電気的に接続されて、これらを制御する。前記モジュール制御部600は、例えば、照明コントローラ、格子コントローラ、及びステージコントローラを含んでもよい。前記照明コントローラは、前記第1及び第2光源ユニット(310、410)をそれぞれ制御して光を発生させ、前記格子コントローラは、前記第1及び2格子移送ユニット(330、430)をそれぞれ制御して前記第1及び第2格子ユニット(320、420)を移動させる。前記ステージコントローラは、前記ステージ移送ユニット120を制御して前記ステージ110を上下左右に移動させる。
【0048】
前記中央制御部700は、前記画像取得部500、及び前記モジュール制御部600と電気的に接続されて、これらを制御する。具体的に、前記中央制御部700は、前記画像取得部500のイメージシステムから前記N個の第1パターン画像及び前記N個の第2パターン画像を受けて、これらを処理して前記測定対象物の3次元形状を測定する。また、前記中央制御部700は、前記モジュール制御部600の照明コントローラ、格子コントローラ、及びステージコントローラをそれぞれ制御してもよい。したがって、前記中央制御部は、イメージ処理ボード、制御ボード、及びインターフェースボードを含んでもよい。
【0049】
以下、上述のような3次元形状測定装置を利用して前記測定対象物10として採用されたプリント回路基板に搭載された所定の素子を検査する方法をより詳細に説明する。
【0050】
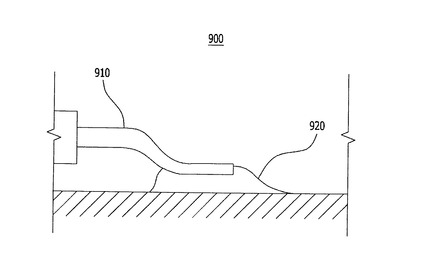
図2は、本発明の一実施形態に係るターミナル検査方法を示したフローチャートである。図3は、プリント回路基板上に形成されたターミナルと半田の一例を示す概略図である。
【0051】
図2及び図3を参照すると、本発明の一実施例に係るターミナルを検査するために、まず測定対象物を撮影して前記測定対象物のピクセル別にイメージデータを取得する(ステップS110)。
【0052】
前記測定対象物は、プリント回路基板900上に形成されたターミナル910と半田(solder)920である。
【0053】
前記測定対象物の各ピクセルによる前記イメージデータは、2次元イメージ測定によって取得される。例えば、前記測定対象物の撮影は、図1に示した3次元形状測定装置の2次元イメージ測定のためのランプ240または第2照明ユニット450を利用して行ってもよい。
【0054】
あるいは、前記各ピクセル別イメージデータは、3次元形状の測定のために得られたイメージデータを利用して取得してもよい。例えば、前記測定対象物の撮影は、図1に示した3次元形状測定装置の第1照明ユニットを利用して3次元イメージを撮影してもよい。前記第1照明ユニットは、上述したように第1及び第2投射部(300、400)を含むか、それ以上の照明部含むものであってもよい。具体的には、まず、前記投射部を利用して複数の方向から格子パターン光を前記測定対象物上に投射し、続いて前記測定対象物上に投射された前記格子パターン光の反射イメージを撮影して3次元イメージデータを取得する。この際、前記イメージデータは前記3次元イメージデータを平均化して取得してもよい。
【0055】
例えば、複数のM個の方向から格子パターン光を測定対象物にN回ずつ照射して前記測定対象物のピクセル別にM×N個のイメージデータを取得してもよい。ここで、NとMは2以上の自然数である。一方、前記M×N個のイメージデータのうちN個のイメージデータをM個の方向毎に平均化して、前記ピクセル別に前記M個の方向に対応するM個の平均イメージデータを算出する。
【0056】
その後、前記測定対象物のピクセル別に高さデータを取得する(ステップS120)。
【0057】
前記ピクセル別高さデータは、前記3次元形状測定のために得られたイメージデータを利用して取得されてもよい。例えば、前記高さデータは上述した図1に示した3次元形状測定装置の第1照明ユニットを利用して3次元イメージを撮影することによって取得されてもよい。本実施形態では、前記高さデータは、前記3次元イメージデータをバケットアルゴリズム(bucket algorithm)を利用して変換することで取得される。
【0058】
例えば、M個の方向毎に格子パターン光を測定対象物にN回ずつ投射して前記測定対象物のピクセル別にM個の高さデータが取得される。
【0059】
その後、前記測定対象物のピクセル別にビジビリティ(visibility)データを取得する(S130)。
【0060】
前記ビジビリティは、画像の明度(intensity)における平均(Ai(x,y))に対する振幅(Bi(x,y))の比率を示す。一般的に、反射率が増加すると前記ビジビリティは増加する。前記ビジビリティ(Vi(x、y))は次の数式(1)のように表される。
Vi(x,y)=Bi(x,y)/Ai(x,y)・・・・(1)
【0061】
多様な種類のパターン画像を取得するために、格子パターン光は多様な方向から前記プリント回路基板上に投射されてもよい。図1に示すように、前記画像取得部500が前記カメラ210で撮影されたN個のパターン画像からX−Y座標係の各位置(i(x,y))でのN個の明るさ信号(Ii1、 Ii2、…、IiN)を抽出し、N−バケットアルゴリズム(N−bucket algorithm)を利用して平均(Ai(x,y))及びビジビリティ(Vi(x,y))を算出する。例えば、N=3である場合と、N=4である場合は、それぞれ次の数式(2)〜(5)に示すようにビジビリティを算出することができる。N=3である場合は、次に示す数式(2)及び(3)によりビジビリティ(Vi(x,y))は算出される。
【数2】

【数3】
【0062】
N=4である場合は、次に示す数式(4)及び(5)によりビジビリティ(Vi(x,y))は算出される。
【数4】
【数5】
【0063】
前記ビジビリティ情報は、少なくとも2つの方向から前記測定対象物上に投射された格子パターン光により取得され、同様に、前記測定対象物のピクセル別に高さ情報が取得される(ステップS120)。すなわち、ピクセル別の前記ビジビリティ情報は、例えば、図1の3次元形状測定装置を利用することによって得られる測定対象のデータから容易に取得することが可能である。
【0064】
前記ピクセル別のビジビリティデータは、前記3次元形状の測定により得られる画像データを利用することにより取得される。例えば、前記ビジビリティデータは、上述のように、図1に示した前記3次元形状測定装置の前記第1照明ユニットを利用して3次元イメージを撮影することにより取得される。本実施形態では、前記ビジビリティデータは、ビジビリティ計算アルゴリズムを利用して前記3次元イメージデータを変換することにより取得される。
【0065】
例えば、前記測定対象物のピクセル別にM個のビジビリティデータを取得するために、M個の方向毎に格子パターン光を測定対象物上にN回ずつ投射する。
【0066】
その後、前記ピクセル別に取得された前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して結果値を算出する(ステップS140)。
【0067】
前記ピクセル別に取得された前記イメージデータ、前記高さデータ及び前記ビジビリティデータは複数の方向から測定されたデータであるため、前記複数のデータを適切に利用して結果値を算出することができる。
【0068】
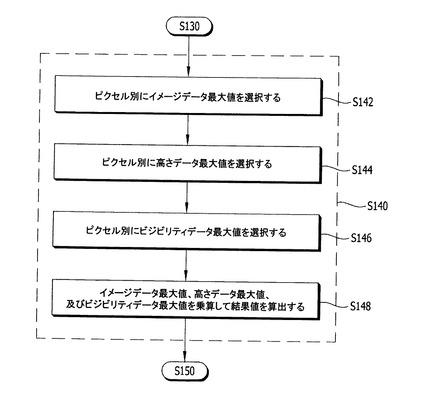
図4は、図2のターミナル検査方法による結果値を算出する一例を示すフローチャートである。
【0069】
図4を参照すると、前記結果値を算出することにおいて、前記ピクセル別に前記複数の方向によるイメージデータからイメージデータ最大値を選択し(ステップS142)、前記ピクセル別に前記複数の方向による高さデータから高さデータ最大値を選択し(ステップS144)、前記ピクセル別に前記複数の方向によるビジビリティデータからビジビリティデータ最大値を選択する(ステップS146)。その後、前記ピクセル別に取得された前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値を乗算して前記結果値を算出する(ステップS148)。
【0070】
この際、ノイズを除去するために、前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きい値を除いた後に選択されてもよい。
【0071】
例えば、前記ピクセル別に前記M個の平均イメージデータから平均イメージデータ最大値を選択し、前記ピクセル別に前記M個の平均高さデータから平均高さデータ最大値を選択し、前記ピクセル別に前記M個の平均ビジビリティデータから平均ビジビリティデータ最大値を選択してもよい。その後、前記ピクセル別に取得された前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して結果値を算出する。
【0072】
上述のように各データの最大値を利用する場合、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、ターミナル領域における各データが半田領域に比べて大きい値を有するため、前記因子の乗算によって前記ターミナル領域と前記半田領域との間の結果値の差はより大きくなることがある。あるいは、前記各データの平均値を利用してもよい。
【0073】
次に、前記算出された結果値を利用してターミナル領域と半田領域とを区分する(ステップS150)。
【0074】
前記算出された結果値は、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータによって決められ、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、前記ターミナル領域が前記半田領域に比べて大きい値を有するようになるので、前記因子の乗算によって結果値の差はより大きくなる。
【0075】
特に、一般的に反射率が周辺に比べて大きい素子の場合、ビジビリティは周辺より更に大きい値を示すので、前記ターミナル領域は前記半田領域に比べて大きい結果値を有するようになり、これによってターミナル領域が更に強調される。
【0076】
一方、前記算出された結果値を利用して前記ターミナル領域と前記半田領域とを区分するために、まず前記ピクセル別に算出された結果値を少なくとも2つのグループに分類(classification)し、同一のグループに属するピクセルは全て連続して分布するように分類した後、前記分類されたグループを利用して前記ターミナル領域と前記半田領域を区分する。
【0077】
すなわち、前記ターミナル領域及び前記半田領域は、前記結果値によって互いに異なる領域に分類され、同一の領域は隣接して配置されるため、同一の領域は連続して分布するように分類される。
【0078】
上述のように、測定対象物のイメージデータ、高さデータ、及びビジビリティデータを取得し、取得したデータを乗算して結果値を算出し、この結果値を利用してターミナル領域と半田領域とを区分することにより、より正確にターミナル領域を確定することができ、より正確に前記ターミナルを検査することができる。
【0079】
また、高さに基づいて3次元的データを利用してターミナル領域を確定するため、2次元画像を利用してターミナル領域を確定する場合に比べて各領域の色の影響を少なくし、照明にも敏感でないため、より正確かつ容易に各領域を区別することができ、カメラのノイズが大きく影響することもない。
【0080】
また、前記イメージデータを3次元的データを利用して取得する場合、2次元イメージデータを取得しなくてもターミナル領域を容易に確定することができる。
【0081】
図5は、本発明の一実施形態に係る実装基板検査装置を示す概略図である。図6は、図5に示した実装基板検査装置を上から見た平面図である。図7は、図5に示した投射部及び第2照明部の位置関係を示す概略図である。
【0082】
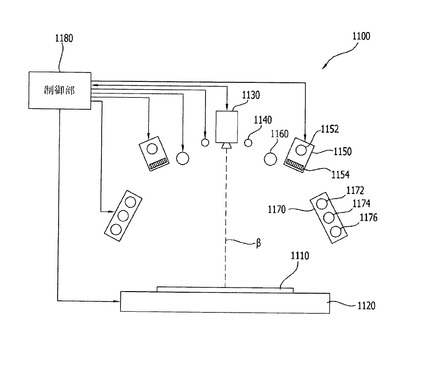
図5、図6、及び図7を参照すると、本発明の一実施形態に係る実装基板検査装置1100は、検査対象物1110を移送するステージ1120と、検査対象物1110のイメージを撮影する画像撮影部1130と、検査対象物1110上に光を照射する第1照明部1140と、検査対象物1110上に格子パターン光を各々投射する複数の投射部1150と、及び検査対象物1110上に光を照射する第2照明部1160と、を含む。また、実装基板検査装置1100は、検査対象物1110上に光を照射する第3照明部1170及び前記構成要素を制御する制御部1180を更に含んでもよい。
【0083】
ステージ1120は、検査対象物1110を支持する。ステージ1120は、制御部1180の制御によってx軸及びy軸に沿って移動し、検査対象物1110を測定位置に移動させる。ステージ1120は、z軸に沿って移動してもよい。
【0084】
画像撮影部1130は、ステージ1120の上部に設置されて検査対象物1110のイメージを撮影する。画像撮影部1130は、ステージ1120の上部でステージ1120の基準面に対して垂直な方向に設置される。画像撮影部1130は、イメージ撮影のためのカメラ及び結像レンズを含む。検査対象物1110で反射される反射光は結像レンズによってCCDカメラまたはCMOSカメラに結像され、カメラは結像された反射光を受けてイメージを撮影する。画像撮影部1130は、例えば、第1照明部1140、投射部1150、及び第2照明部1160からそれぞれ検査対象物1110上に光を照射する時、検査対象物1110のイメージを撮影する。また、画像撮影部1130は、第3照明部1170から検査対象物1110上にカラー光を照射する時、検査対象物1110のイメージを撮影する。
【0085】
第1照明部1140は、画像撮影部1130と投射部1150との間に配置され、例えば、画像撮影部1130に隣接するように配置される。第1照明部1140は、半導体部品が実装されたプリント回路基板などの検査対象物1110の初期調整のための基準(fiducial)照明の機能を有する。第1照明部1140は、画像撮影部1130に隣接して配置され、検査対象物1110に対して実質的に垂直方向に光を照射する。第1照明部1140は、画像撮影部1130を囲むようにリング形状に形成される。例えば、第1照明部1140は、複数の発光ダイオードが円形のリング形状に配列された構造を有してもよい。第1照明部1140は、画像撮影部1130内に一体で形成されてもよい。
【0086】
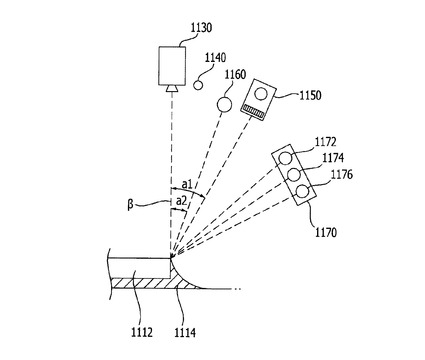
複数の投射部1150は、ステージ1120の上部に一定の角度で傾くように設置される。各投射部1150は、検査対象物1110の3次元形状情報を取得するための照明であって、格子パターン光を発生して検査対象物1110上に投射する。投射部1150は、第1角度(a1)により検査対象物1110上に格子パターン光を投射する。すなわち、投射部1150は、検査対象物1110の平面に垂直な法線(β)を基準に第1角度(a1)だけ傾いた角度で格子パターン光を投射する。例えば、第1角度(a1)は約30゜である。
【0087】
投射部1150は、検査対象物1110の検査精度を高めるために多くの方向から格子パターン光を投射するように配置される。このために、投射部1150は、画像撮影部1130を中心に円周方向に沿って互いに一定間隔をあけて配置される。例えば、実装基板検査装置1100は、60゜の角度で離隔されるように配置された6個の投射部1150を含む。あるいは、実装基板検査装置1100は、2個、3個、4個、8個などの多様な個数の投射部1150を含んでもよい。複数の投射部1150は、一定時間の間隔をおいて検査対象物1110上に互いに異なる方向から格子パターン光を投射する。
【0088】
各投射部1150は、光を発生する光源1152及び格子素子1154を含んでもよい。光源1152で発生された光は、格子素子1154を通過して格子パターン光に変換される。格子素子1154は、位相遷移された格子パターン光を発生させるためにピエゾアクチュエータ(piezo actuator:PZT)などの格子移送装置を利用して2π/nずつn回移送される。ここで、nは2以上の自然数である。投射部1150は、格子素子1154をn回移送させながら移送毎に検査対象物1110上に格子パターン光を投射する。投射部1150は、格子素子1154を透過した格子パターン光の焦点を合わせて検査対象物1110上に透過する投射レンズ(図示せず)を更に含んでもよい。
【0089】
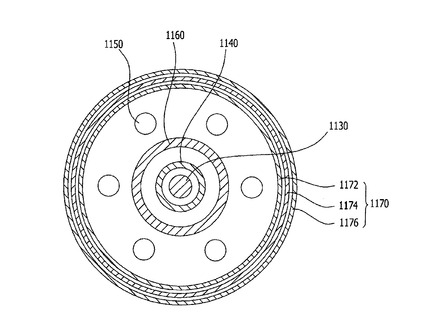
第2照明部1160は、図6に示すように、画像撮影部1130と投射部1150との間に設置され、例えば、第1照明部1140と投射部1150との間に設置される。すなわち、第2照明部1160は、実装基板検査装置1100を上から見た時、画像撮影部1130と投射部1150との間の空間に配置される。第2照明部1160は、検査対象物1110の検査領域を設定するための照明であって、特に、検査対象物1110に実装された半導体部品のターミナル1112の領域と半田1114の領域とを明確に区分するために用いられる。すなわち、ターミナル1112と半田1114との間の境界領域に該当するターミナル1112の終端位置を明確に把握するためにはコントラストを向上させる必要があり、コントラストを向上させるために投射角度を検査対象物1110に対して垂直に近いように設計することが望ましい。しかし、検査対象物1110に対して垂直に近い角度に照明を照射する第1照明部1140を使用するのみでは希望するコントラストを得ることは難しく、カメラの視野(field of View:FOV)の全体明るさの均一性が低下して、ターミナル1112の終端位置を区分のための照明として不適切である。これによって、コントラストを向上させるための第2照明部1160が画像撮影部1130と投射部1150との間に追加して設置される。第2照明部1160は、検査対象物1110の平面に垂直な法線(β)を基準に投射部1150より小さな角度で光を照射する。すなわち、第2照明部1160は、検査対象物1110の平面に垂直な法線(β)を基準に投射部1150の照射角度である第1角度(a1)より小さい第2角度(a2)で光を照射する。第2照明部1160の照射角度は垂直に近いほど良いが、検査装置の構造的特徴とコントラストの向上を考慮して決定される。実験を通じて確認した結果、第2照明部1160が約17゜〜約20゜の範囲の角度で光を照射する時、輝度均一性に問題がなく、コントラストが向上することを確認した。第2照明部1160は、画像撮影部1130を囲むリング形状に形成される。例えば、第2照明部1160は、複数の発光ダイオードがリング形状に配列された構造に形成されてもよい。
【0090】
上述のように、画像撮影部1130と投射部1150との間に第1照明部1140とは別にリング形状の第2照明部1160を追加して設置し、第2照明部1160は、投射部1150の照射角度より垂直に近い照射角度で光を検査対象物1110上に照射することで、コントラスト及び輝度均一性を向上させることができ、検査対象物1110に形成されたターミナル1112の領域と半田1114の領域とを明確に区分することができる。
【0091】
一方、実装基板検査装置1100は、検査対象物1110に隣接するように設置された第3照明部1170を更に含んでもよい。第3照明部1170は、検査対象物1110の検査領域を設定するか、又は、ローカル基準(local fiducial)のための照明であって、カラー光を発生させて検査対象物1110上に照射する。第3照明部1170は、互いに異なる色の光を発生させる第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176を含んでもよい。例えば、第1カラー照明部1172は赤色光を発生させ、第2カラー照明部1174は緑色光を発生させ、第3カラー照明部1176は青色光を発生させる。第1、第2、及び第3カラー照明部(1172、1174、1176)が発生させる光の色は様々に変更してもよい。
【0092】
第1、第2、及び第3カラー照明部(1172、1174、1176)は、各々リング形状に形成され、第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176に行くほど直径が大きくなるリング形状に形成される。よって、第2カラー照明部1174は、第1カラー照明部1172に比べて大きい照射角でカラー照明を照射し、第3カラー照明部1176は、第2カラー照明部1174に比べて大きい照射角でカラー照明を照射する。
【0093】
制御部1180は、上述の構成要素を全体的に制御する。具体的に、制御部1180は、検査対象物1110を検査位置に配置させるためにステージ1120の移送を制御する。制御部1180は、複数の投射部1150を順次動作させ、各投射部1150の格子素子1154を移送させながら移送毎に検査対象物1110上に格子パターン光を照射するように投射部1150を制御する。制御部1180は、検査対象物1110の調整または領域設定などのために光を照射する第1照明部1140及び第2照明部1160を制御し、カラー光を照射する第3照明部1170の照射動作を制御する。制御部1180は、第1照明部1140、第2照明部1160、投射部1150、及び第3照明部1170などの光の照射時、検査対象物1110のイメージを撮影するように画像撮影部1130を制御する。制御部1180は、第2照明部1160の照射を通じて撮影された検査対象物1110の第1イメージと、投射部1150の格子パターン光の投射を通じて撮影された検査対象物1110の第2イメージと、を利用して検査対象物1110のターミナル1112の領域と半田1114の領域とを区分する。
【0094】
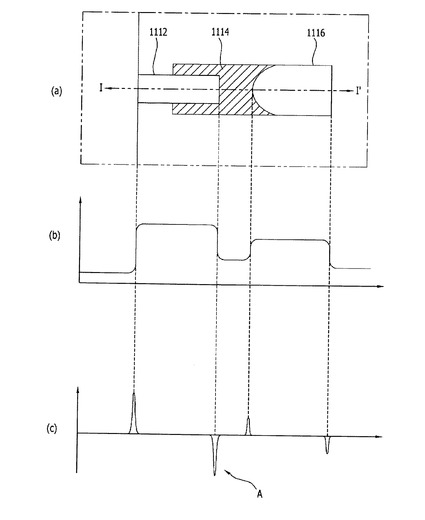
図8は、検査対象物のターミナル領域と半田領域とを区分する過程を示す平面図である。図8において、(a)は半導体部品のターミナル1112が半田1114によって基板パッド1116に実装された状態のコントラストマップを示し、(b)は(a)に示したコントラストマップのI−I'線に沿って投映して得られたコントラスト情報を示し、(c)は(b)に示したコントラスト情報を微分して得られた微分情報を示す。
【0095】
図5及び図8を参照すると、制御部1180は、第2照明部1160の照明によって撮影された第1イメージからイメージデータを取得する。また、制御部1180は、投射部1150の格子パターン光の照射によって撮影された第2イメージからビジビリティデータ及び高さデータなどの3次元的データを取得する。例えば、前記高さデータは、前記第2イメージをバケットアルゴリズムを利用して変換することで取得され、前記ビジビリティデータは、前記第2イメージをビジビリティ算出アルゴリズムを利用して変換することで取得される。
【0096】
制御部1180は、前記第2イメージから取得された前記ビジビリティデータ及び前記高さデータの少なくとも一つと、前記第1イメージから取得された前記イメージデータとを組み合わせて、図8の(a)に示したような新しいコントラストマップを生成する。例えば、前記コントラストマップは、前記イメージデータと前記高さデータとをピクセル別に乗算するか、あるいは前記イメージデータと前記ビジビリティデータとをピクセル別に乗算するか、または前記イメージデータ、前記高さデータ、及び前記ビジビリティデータをピクセル別に乗算することにより生成される。
【0097】
複数の投射部1150を用いる場合、ピクセル別に取得された前記高さデータ及び前記ビジビリティデータは、複数の方向から測定された複数のデータであってもよい。よって、前記複数のデータを適切に活用することで、效果的な前記コントラストマップを生成することができる。例えば、前記コントラストマップを生成する際に、ピクセル別に複数の方向から取得された高さデータの中から高さデータ最大値を選択し、ピクセル別に複数の方向から取得されたビジビリティデータの中からビジビリティデータ最大値を選択する。その後、ピクセル別に選択された前記高さデータ最大値及び前記ビジビリティデータ最大値の中から少なくとも一つと、ピクセル別の前記イメージデータとを乗算して前記コントラストマップを生成してもよい。ノイズを除去するために、前記高さデータ最大値及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きい値を除いた後で選択される。
【0098】
上述のように、各データの最大値を利用する場合、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、ターミナル1112の領域が半田1114の領域に比べて更に大きい値を有することができるため、前記因子の乗算によってターミナル1112の領域と半田1114の領域のコントラストマップにおける差がより大きくなることがある。一方、コントラストマップを生成において、各データの最大値を利用する代わりに各データの平均値を利用してもよい。
【0099】
前記コントラストマップは、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータによって決定され、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、ターミナル1112の領域が半田1114の領域に比べて大きい値を有するようになるため、前記因子の乗算によってターミナル1112の領域と半田1114の領域の差がより大きくなるようになる。特に、反射率が周辺に比べて大きい素子の場合にビジビリティは周辺より更に大きい値を示すため、ターミナル1112の領域は半田1114の領域に比べて大きい値を有するようになり、これによってターミナル1112の領域が更に強調される。
【0100】
その後、制御部1180は、生成されたコントラストマップの分析により検査対象物1110上に形成されたターミナル1112と半田1114の領域とを区分する。すなわち、制御部1180は、I−I’線に沿って図8の(a)に示されたコントラストマップを投映することにより、図8の(b)に示されたコントラスト情報を生成する。その後、制御部1180は、図8の(b)に示したコントラスト情報を微分して図8の(c)に示した微分情報を生成する。ターミナル1112の領域から半田1114の領域に進む時、コントラストが大幅に減少する。このため、制御部1180は、生成された微分情報から負の値として最大値を有する位置(A)を検出して、この位置をターミナル1112の領域と半田1114の領域とが接触する地点として判断することで、ターミナル1112の領域と半田1114の領域とを区分することができる。
【0101】
上述のように、第2照明部1160によりコントラストが向上した前記イメージデータと、前記高さデータ及び前記ビジビリティデータの少なくとも一つとを組み合わせて生成した前記コントラストマップを利用することで、ターミナル領域1112の領域と半田領域1114の領域とをより明確に区分することができる。
【0102】
図9は、本発明の一実施形態に係る実装基板検査方法を示すフローチャートである。
【0103】
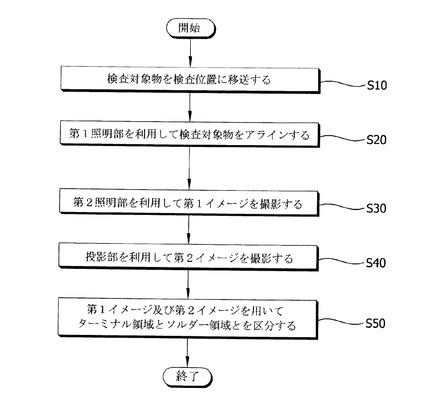
図5及び図9を参照すると、検査対象物1110を検査するために、制御部1180は、検査対象物1110を測定位置に移送させるように、ステージ1120を移送させる(ステップS10)。
【0104】
検査対象物1110を検査位置に移送させた後、画像撮影部1130に隣接するように設置された第1照明部1140から検査対象物1110上に光を照射して、検査対象物1110を調整させる(ステップS20)。すなわち、第1照明部1140から照射された光を利用して検査対象物1110のイメージを画像撮影部1130で撮影し、調整マークなどが含まれた前記イメージを確認した後、ステージ1120の精密移送により検査対象物1110の検査位置を正確に調整する。
【0105】
検査対象物1110の調整が完了すると、第2照明部1160を利用して検査対象物1110の第1イメージを撮影する(ステップS30)。具体的に、画像撮影部1130と投射部1150との間に設置された第2照明部1160は、検査対象物1110に対して投射部1150の照射角度より小さな約17゜〜約20゜の角度で光を照射するように動作する。第2照明部1160により光を検査対象物1110上に照射した後、検査対象物1110の第1イメージを画像撮影部1130で撮影する。
【0106】
前記第1イメージの撮影とは別に、投射部1150を利用して検査対象物1110の第2イメージを撮影する(ステップS40)。具体的に、画像撮影部1130を中心に円周方向に沿って離隔されるように配置された複数の投射部1150を順次動作させて検査対象物1110上に対して約30゜の角度で格子パターン光を順次投射する。各投射部1150は、格子素子1154を移送させながら移送毎に検査対象物1110上に格子パターン光を投射する。格子パターン光を検査対象物1110上に投射した後、検査対象物1110の第2イメージは画像撮影部1130にて撮影される。
【0107】
その後、画像撮影部1130で撮影された前記第1イメージ及び前記第2イメージを利用して検査対象物1110のターミナル1112の領域と半田1114の領域とを区分する(ステップS50)。具体的に、制御部1180は、前記第2イメージから取得されたビジビリティデータ及び高さデータの少なくとも一つと前記第1イメージから取得されたイメージデータとを組み合わせてコントラストマップを生成する。その後、制御部1180は、生成されたコントラストマップの分析をして検査対象物1110上に形成されたターミナル1112の領域とソルダー1114の領域を区分する。すなわち、制御部1180は、前記コントラストマップを一方向に投映しながら位置によるコントラストの変化を示すコントラスト情報を生成し、前記コントラスト情報を微分してコントラストの変化が大きくなる位置を示すための微分情報を生成する。その後、制御部1180は、前記微分情報から負の値として最大値を有する位置を検出し、この位置をターミナル1112の領域と半田1114の領域とが接触する地点と判断して、ターミナル1112の領域と半田1114の領域とを区分する。
【0108】
投射部1150を利用した第2イメージの撮影及び第2照明部1160を利用した第1イメージの撮影とは別に、第3照明部1170を利用して別のイメージを撮影してもよい。具体的に、ステージ1120に隣接して設置された第3照明部1170は、検査対象物1110上にカラー光を照射するように動作する。第3照明部1170は、多段のリング形状に形成されて互いに異なる色の光を発生させる第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176を含んでもよい。第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176は、同時にまたは順次にカラー光を照射する。第3照明部1170によりカラー光を検査対象物1110上に照射した後、検査対象物1110のカラーイメージを画像撮影部1130で撮影する。制御部1180は、画像撮影部1130で撮影された前記カラーイメージを検査対象物1110の検査領域を設定するかローカル基準のための情報として利用し、前記第2イメージと組合せて検査対象物1110の3次元形状をより精密に検査する情報として活用する。
【0109】
上述のように、本発明に係る実装基板検査装置1100は、画像撮影部1130と隣接するように設置された第1照明部1140とは別に画像撮影部1130と投射部1150との間にリング形状の第2照明部1160が設置され、第2照明部1160は投射部1150の照射角度より小さい約17゜〜約20゜の角度で光を検査対象物1110上に照射する。よって、第2照明部1160をリング形状に形成して視野の輝度均一性を向上させ、第2照明部1160の照射角度を投射部1150より垂直に近く設定して、撮影されたイメージのコントラストを向上させることができ、検査対象物1110上に形成されたターミナル1112の領域と半田1114の領域とを明確に区分して検査の信頼性を向上させることができる。
【0110】
以上、添付図面を参照しながら本発明の好適な実施形態について詳細に説明したが、本発明はかかる例に限定されない。本発明の属する技術の分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範囲内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本発明の技術的範囲に属するものと理解される。
【符号の説明】
【0111】
10 測定対象物
100 測定ステージ部
200 画像撮影部
300 第1投射部
400 第2投射部
450 第2照明ユニット
500 画像取得部
600 モジュール制御部
700 中央制御部
900 プリント回路基板
910 ターミナル
920 半田
1100 実装基板検査装置
1110 検査対象物
1120 ステージ
1130 画像撮影部
1140 第1照明部
1150 投射部
1160 第2照明部
1170 第3照明部
1180 制御部
【技術分野】
【0001】
本発明は基板検査装置及び検査方法に関わり、より詳細にはプリント回路基板上に部品を装着する時、ターミナルと半田とを明確に区分することのできる基板検査装置及び検査方法に関する。
【背景技術】
【0002】
一般的に、3次元形状測定装置は、測定対象物の3次元形状を測定するために測定対象物上に格子パターン光を照射し、格子パターン光による反射光を撮影する。3次元形状測定装置は、一般的にステージ、カメラ、照明ユニット、中央処理部等を含む。
【0003】
一般的に、プリント回路基板上に半導体部品が実装された実装基板は多様な電子製品に使われている。このような実装基板を製造する際に、半導体部品のターミナル(terminal)はプリント回路基板のパッド上に半田付けされる。
【0004】
このように実装された半導体部品は、プリント回路基板に確実に半田付けされたかを検査する必要がある。このような実装基板の検査の際に、半導体部品の検査精度を高めるために半導体部品のターミナル領域と半田領域とを明確に区分することが重要である。
【0005】
従来には、前記のような領域区分のために2次元照明を利用して2次元画像を取得していた。しかし、2次元画像を用いてターミナル領域と半田領域とを区別することは、各領域の色が類似し、照明に敏感であるため区別しにくく、カメラのノイズの影響を大きく受けて各領域の明確な区別が行われないという問題点があった。
【0006】
また、2次元照明を利用してターミナル領域と半田領域との境界部分を明確に区分するためには、コントラスト(contrast)を向上させる必要がある。しかし、従来の実装基板検査装置では、2次元照明のコントラストを向上させるのに限界があるため、半導体部品のターミナル領域と半田領域とを明確に区分することは困難であるという問題がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、前記問題に鑑みてなされたものであり、実装基板に実装された半導体部品のターミナル領域と半田領域とを明確に区分して検査の信頼性を向上させることが可能な基板検査装置を提供することにある。
【0008】
また、本発明の目的は、実装基板に実装された半導体部品のターミナル領域とソルダー領域とを明確に区分することができる基板検査方法を提供することにある。
【課題を解決するための手段】
【0009】
本発明の一実施形態に係る検査方法は、測定対象物を撮影して前記測定対象物の各ピクセルのイメージデータを取得し、前記測定対象物のピクセル別に高さデータを取得し、前記測定対象物のピクセル別にビジビリティ(visibility)データを取得し、前記取得された前記イメージデータと、前記ピクセル別の前記高さデータ及び前記ビジビリティデータのうち少なくとも1つとを乗算して結果値を算出し、前記算出された結果値を利用してターミナル領域を設定すること、を含む。
【0010】
前記結果値は、前記ピクセル別に前記イメージデータと前記高さデータと前記ビジビリティデータとを乗算して算出されてもよい。前記ビジビリティデータは、前記ピクセル別に撮影された画像の明度(intensity)における平均(Ai(x,y)))に対する振幅(Bi(x,y))の比率(Vi(x,y)=Bi(x,y)/Ai(x,y)としてもよい。
【0011】
前記測定対象物の各ピクセルに対する前記高さデータ及び前記ビジビリティデータを取得することは、格子パターン光をN回前記測定対象物上に投射し、前記測定対象物上にN回投射された前記格子パターン光により反射イメージデータをN回取得し、前記取得されたN個の反射イメージデータを利用して前記高さデータを取得し、前記反射イメージデータを利用して前記ビジビリティデータを取得すること、を含んでもよい。
【0012】
前記検査方法は、前記測定対象物上に投射された前記格子パターン光により反射イメージデータをN回取得した後、前記N個の反射イメージデータを平均化して前記イメージデータを取得すること、を更に含んでもよい。
【0013】
前記測定対象物は複数の方向から撮影され、前記測定対象物の前記ピクセル別イメージデータ、前記ピクセル別高さデータ、及び前記ピクセル別ビジビリティデータは、前記複数の方向から取得されてもよい。前記ピクセル別の前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して前記結果値を算出することは、前記ピクセル別の前記複数の方向のイメージデータからイメージデータ最大値を選択し、前記ピクセル別の前記複数の方向の高さデータから高さデータ最大値を選択し、前記ピクセル別の前記複数の方向のビジビリティデータからビジビリティデータ最大値を選択し、前記ピクセル別に選択された前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値を乗算して前記結果値を算出すること、を含んでもよい。前記ピクセル別に取得された前記イメージデータと、前記高さデータ、及び前記ビジビリティデータのうち少なくとも1つとを乗算して前記結果値を算出することは、前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きいか否かを確認することを更に含んでもよい。
【0014】
本発明の他の実施形態に係る検査方法は、複数のM個の方向に格子パターン光を測定対象物にN回ずつ照射して前記測定対象物のピクセル別にM×N個のイメージデータ、M個の高さデータ、及びM個のビジビリティデータを取得し(NとMは、2以上の自然数)、前記M×N個のイメージデータのうち、M個の方向別にN個のイメージデータをそれぞれ平均化して、前記ピクセル別に前記M個の方向に対応するM個の平均イメージデータを算出し、前記ピクセル別に前記M個の平均イメージデータから平均イメージデータ最大値を選択し、前記ピクセル別に前記M個の高さデータから高さデータ最大値を選択し、前記ピクセル別に前記M個のビジビリティデータからビジビリティデータ最大値を選択し、前記ピクセル別に選択された前記平均イメージデータ最大値、前記高さデータ最大値、前記ビジビリティデータ最大値を前記ピクセル別に乗算して結果値を算出し、前記算出された結果値を利用してターミナル領域を区分すること、を含む。
【0015】
前記算出された結果値を利用して前記ターミナル領域を区分することは、前記ピクセル別に算出された結果値を少なくとも2つのグループに分類し、同一のグループに属するピクセルは、連続して分布するようにし、前記分類されたグループを利用して前記半田領域から前記ターミナル領域を区分すること、を含んでもよい。
【0016】
本発明の更に他の実施形態に係る基板検査装置は、基板を移送するステージと、前記基板を調整するための光を検査対象上に照射する第1照明部と、前記基板の高さデータを取得するための格子パターン光を前記検査対象物上に投射する投射部と、前記基板に実装された部品のターミナル領域を設定するための光を前記検査対象物上に照射する第2照明部と、前記第2照明部より前記基板の近くに配置された第3照明部と、前記第2照明部の光の照射によって前記基板の第1イメージを撮影し、前記投射部の格子パターン光の照射によって前記基板の第2イメージを撮影する画像撮影部と、前記画像撮影部で撮影された前記第1イメージ及び前記第2イメージを利用して前記ターミナル領域を区分する制御部と、を含む。
【0017】
前記第2照明部は、前記画像撮影部と前記投射部との間に設置されてもよい。前記第2照明部は、前記基板の平面に垂直な法線に対して約17゜〜約20゜の角度範囲に光を照射してもよい。
【0018】
前記制御部は、前記第2イメージから取得されたビジビリティデータ及び高さデータのうち少なくとも一つと、前記第1イメージから取得されたイメージとを利用してコントラストマップを生成し、前記コントラストマップを分析して前記ターミナル領域を区分してもよい。
【0019】
前記投射部は、前記基板上に格子パターン光をN回投射し、前記画像撮影部は前記基板にN回投射された格子パターン光を撮影してもよい。前記ビジビリティデータは、前記画像撮影部によって撮影された画像の明るさにおいて平均(Ai(x,y))に対する振幅(Bi(x、y))の比率(Vi(x,y)=Bi(x,y)/Ai(x,y))としてもよい。前記投射部は、前記基板上に異なる方向から格子パターン光を投射する複数の投映部であってもよく、前記制御部は、前記複数の投射部による複数の高さデータ及び複数のビジビリティデータを取得してもよい。前記制御部は、前記複数の高さデータの最大値、前記複数のビジビリティデータの最大値、及び前記イメージデータを乗算して前記コントラストマップを生成してもよい。
【0020】
本発明の更に他の実施形態に係る基板検査方法は、ステージの移送によって基板を測定位置に移送し、第1光を前記基板上に照射して前記基板を調整し、画像撮影部と投射部との間から第2光を前記基板上に照射して前記基板の第1イメージを撮影し、前記投射部の格子パターン光を前記基板上にN回照射して前記基板の第2イメージを撮影し、前記第2イメージからビジビリティデータ及び高さデータを取得し、前記第1イメージ、前記ビジビリティデータ、及び前記高さデータを利用してコントラストマップを生成し、前記コントラストマップを利用して前記基板に実装された部品のターミナル領域を区分すること、を含む。
【発明の効果】
【0021】
本発明によれば、測定対象物のイメージデータ、高さデータ、及びビジビリティデータを取得し、取得されたデータを乗算して結果値を算出し、結果値を利用してターミナル領域と半田領域を区分することで、より正確にターミナル領域を確定することができ、より精密に前記ターミナルを検査することができる。
【0022】
また、高さに基づいた3次元的データを利用してターミナル領域を確定するため、2次元画像を利用してターミナル領域を確定する場合に比べて、各領域の色による影響を少なくし、照明に対しても敏感でないため、より正確かつ容易に各領域を区別することができ、カメラのノイズの影響も低減できる。
【0023】
また、前記イメージデータは3次元的データを利用して取得される場合、2次元イメージデータを取得しなくてもターミナル領域を容易に確定することができる。
【0024】
また、画像撮影部と隣接するように設置された第1照明部と、視野における輝度均一性を向上させるために画像撮影部と投射部との間にリング形状の第2照明部を追加設置して視野角内のコントラストの均一性を向上させ、前記第2照明部の照射角度を投射部より小さく設定して撮影されたイメージのコントラストを向上させることができる。よって、投射部を利用して得られたイメージと第2照明部を利用して得られたイメージとを組み合わせて検査対象物に形成されたターミナル領域と半田領域とを明確に区分し、検査の信頼性を向上させることができる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態に係る3次元形状測定方法に用いられる3次元形状測定装置を示す概略図である。
【図2】本発明の一実施形態に係るターミナル検査方法を示すフローチャートである。
【図3】プリント回路基板上に形成されたターミナルと半田の一例を示す概略図である。
【図4】図2のターミナル検査方法による結果値を算出する一例を示すフローチャートである。
【図5】本発明の一実施形態に係る実装基板検査装置を示す概略図である。
【図6】図5に示した実装基板検査装置を上側から見た平面図である。
【図7】図5に示した投射部及び第2照明部の位置関係を示す概略図である。
【図8】検査対象物のターミナル領域と半田領域とを区分する過程を示す平面図である。
【図9】本発明の一実施形態に係る実装基板検査方法を示すフローチャートである。
【発明を実施するための形態】
【0026】
本発明は多様に変更することができ、多様な形態を有することができるが、ここでは、特定の実施形態を図面に例示して詳細に説明する。但し、ここでの記載は、本発明を特定の開示形態に限定するものではなく、本発明の権利範囲は、本発明の思想及び技術範囲に含まれる全ての変更、均等物、乃至代替物を含むことを理解すべきである。
【0027】
構成要素、又は、層が、他の構成要素、又は、層“の上に(on)”、“に接続され(connected to)”、又は、“に結合され(coupled to)”とされる場合は、その構成要素、又は、層は、他の構成要素、又は、層、又は、構成要素の中、又は、層間に、直接的に、接続されるか、又は、結合されることを理解すべきである。一方、構成要素が、他の構成要素、又は、層、“の直上に(directly on)”、“に直接接続され(directly connected to)”、又は、“に直接結合され(directly coupled to)”とされる場合は、その構成要素は他の構成要素の中、又は、層間にはない。構成要素全般に亘って数字が参照される。ここで用いられるように、用語“及び/又は(and/or)”は、掲載された関連事項の1つ以上の全ての組み合わせが含まれる。
【0028】
また、第1、第2、第3等の用語は、多様な構成要素、部品、領域、層、及び/又は、部を説明するために使用することができるが、これらの構成要素、部品、領域、層、及び/又は、部は用語によって限定されない。これらの用語は一つの構成要素、部品、領域、層、又は、部を他の領域、層、又は、部から区別する目的としてのみ使用される。例えば、本発明の権利範囲から逸脱することなしに、第1の構成要素、部品、領域、層、又は、部は、第2の構成要素、部品、領域、層、又は、部と称されてもよく、同様に第2の構成要素、部品、領域、層、及び/又は、部も第1の構成要素、部品、領域、層、及び/又は、部に称されてもよい。
【0029】
空間に関連する要件として、“下方に(beneath)”、“下方に(below)”、“下側の(lower)”、“上側に(above)”、“上方の(upper)”等は、図に示される一つの要件又は特徴と他の要件又は特徴の関係を開示する説明を容易にするために、以下で使用される。空間に関連する要件は、図において表現される動作に加えて、使用中又は動作中の装置の異なる動作を含むことを理解すべきである。例えば、図において装置が回転すれば、他の要件又は特徴の“下方に(beneath)”又は“下方に(below)”として表される要素は、その他の要件又は特徴の“上側に(above)”に配置される。このように、典型的な用語“下方に(below)”は、“上側に(above)”及び“下方に(below)”の両方向を含めることができる。装置は、他に配置される(90°又は他方向に回転される)こと、及びここで用いられる空間に関連する記述は、適宜解釈される。
【0030】
ここで用いられる技術用語は、特定の実施の形態のみを記述する目的であり、本発明を制限するものではない。ここで用いられる単数形“a”、“an”及び“the”は、前後関係が明らかにされない限り、複数形も含むものとする。更に、用語“構成する(comprises)”及び/又は“構成する(comprising)”が本明細書において用いられる場合、規定された特徴、整数、ステップ、動作、要素、及び/又は構成要素の存在を示すが、一つ以上の他の特徴、整数、ステップ、動作、構成要素、及び/又はそのグループの存在または追加を排除するものではない。
【0031】
本発明の一実施形態は、本発明の理想化した一実施形態の概略図(中間構造)である断面図を参照して説明する。その結果として、図面の形状からの変形例は、例えば、製造技術、及び/又は、許容範囲が予想される。その結果、本発明の一実施の形態は、ここに図示した範囲の特定の形状に限定して解釈されるものではなく、例えば、製造から生じる形状から逸脱するものも含まれる。例えば、長方形として図示された挿入部は、一般的にその端部が非挿入部に挿入されてから二元変更されるよりむしろ、挿入部の円くなった、又は湾曲した特徴、及び/又は、勾配を有している。同様に、挿入により形成される埋設領域は、埋設領域と表面との間の領域で行われる挿入の結果である。図形において図示された領域は、事実上の概要であり、それらの形状は装置の領域の実質的な形状を図示することを目的とするものではなく、本発明の範囲を制限することを目的とするものではない。
【0032】
本発明において用いた用語は、特定の実施例を説明するためのものであって、本発明を限定するのではない。単数の表現は、文脈上、明白に相違が示されない限り、複数の表現を含む。
【0033】
本発明において、「含む」または「有する」等の用語は、明細書上に記載された特徴、数字、ステップ、動作、構成要素、部品、又はこれらを組み合わせたものが存在することを意図するものであって、一つまたはそれ以上の他の特徴や数字、ステップ、動作、構成要素、部品、又はこれらを組み合わせたもの等の存在または付加の可能性を予め排除しないことを理解しなければならない。
【0034】
なお、異なるものとして定義しない限り、技術的であるか科学的な用語を含めてここで利用される全ての用語は、本発明が属する技術分野において通常の知識を有する者によって一般的に理解されるものと同一の意味を有している。一般的に利用される辞典に定義されているもののような用語は、関連技術の文脈上で有する意味と一致する意味を有することと解釈すべきであり、本発明において明白に定義されない限り、過度に形式的な意味には解釈されない。
【0035】
以下、添付図面を参照して本発明の好適な実施形態について詳細に説明する。
【0036】
図1は、本発明の一実施形態に係る3次元形状測定方法に用いられる3次元形状測定装置を示す概略図である。
【0037】
図1を参照すると、本発明の一実施形態に係る3次元形状測定方法に用いられる3次元形状測定装置は、測定ステージ部100、画像撮影部200、第1及び第2投射部(300、400)を含む第1照明ユニット、第2照明ユニット450、画像取得部500、モジュール制御部600、及び中央制御部700を含む。
【0038】
前記測定ステージ部100は、測定対象物10を支持するステージ110及び前記ステージ110を移送させるステージ移送ユニット120を含む。本実施形態では、前記ステージ110によって前記測定対象物10が前記画像撮影部200と前記第1及び第2投射部(300、400)に対して移動するによって、前記測定対象物10における測定位置が変更される。
【0039】
前記画像撮影部200は、前記ステージ110の上部に配置され、前記測定対象物10から反射された光を受けて前記測定対象物10の画像を測定する。すなわち、前記画像撮影部200は、前記第1及び第2投射部(300、400)で出射されて前記測定対象物10から反射された光を受け、前記測定対象物10の平面画像を撮影する。
【0040】
前記画像撮影部200は、カメラ210、結像レンズ220、フィルタ230、及びランプ240を含む。前記カメラ210は、前記測定対象物10から反射される光を受けて前記測定対象物10の平面画像を撮影する。前記カメラ210は、例えば、CCDカメラやCMOSカメラのいずれか一つを含む。前記結像レンズ220は、前記カメラ210の下部に配置され、前記測定対象物10で反射される光を前記カメラ210に結像させる。前記フィルタ230は、前記結像レンズ220の下部に配置され、前記測定対象物10で反射される光を透過させて前記結像レンズ220に提供する。前記フィルタ230は、例えば、周波数フィルタ、カラーフィルタ、及び光強度調節フィルタのいずれか一つが含まれる。前記ランプ240は、前記フィルタ230の下部に円形状に配置され、前記測定対象物10の2次元形状のような特定画像を撮影するために前記測定対象物10に光を提供する。
【0041】
前記第1投射部300は、例えば、前記画像撮影部200の右側に前記測定対象物10を支持する前記ステージ110に対して傾くように配置される。前記第1投射部300は、第1光源ユニット310、第1格子ユニット320、第1格子移送ユニット330、及び第1集光レンズ340を含む。前記第1光源ユニット310は、光源と少なくとも一つのレンズとで構成されて光を発生し、前記第1格子ユニット320は、前記第1光源ユニット310の下部に配置されて前記第1光源ユニット310で発生された光を格子パターンを有する第1格子パターン光に変更する。前記第1格子移送ユニット330は、前記第1格子ユニット320と連結されて前記第1格子ユニット320を移送し、例えば、PZT(Piezoelectric)移送ユニットや精密直線移送ユニットのいずれか一つが含まれる。前記第1集光レンズ340は、前記第1格子ユニット320の下部に配置されて前記第1格子ユニット320から出射された前記第1格子パターン光を前記測定対象物10に集光させる。
【0042】
前記第2投射部400は、例えば、前記画像撮影部200の左側に前記測定対象物10を支持する前記ステージ110に対して傾くように配置される。前記第2投射部400は、第2光源ユニット410、第2格子ユニット420、第2格子移送ユニット430、及び第2集光レンズ440を含む。前記第2投射部400は、上述した前記第1投射部300と実質的に同一であるため、詳細な説明は省略する。
【0043】
前記第1格子移送ユニット330は、前記第1格子ユニット320をN回順次移動させて前記第1投射部300において前記測定対象物10上にN個の第1格子パターン光が照射される時、前記画像撮影部200は前記測定対象物10で反射された前記N個の第1格子パターン光を順次受光してN個の第1パターン画像を撮影する。また、前記第2格子移送ユニット430は、前記第2格子ユニット420をN回順次移動させて前記第2投射部400において前記測定対象物10上にN個の第2格子パターン光が照射される時、前記画像撮影部200は前記測定対象物10で反射された前記N個の第2格子パターン光を順次受光してN個の第2パターン画像を撮影する。ここで、前記Nは自然数であって、例えば、4であってもよい。
【0044】
本実施形態では、前記第1及び第2格子パターン光を発生させる照明装置として前記第1及び2投射部(300、400)のみを説明したが、前記投射部は3台以上であってもよい。すなわち、前記格子パターン光は、多様な方向から前記測定対象物10上に照射されてもよく、多様なパターン画像が撮影されてもよい。例えば、3台の投射部が前記画像撮影部200を中心にして正三角形の形態に配置される場合、3つの格子パターン光が互いに異なる方向から前記測定対象物10上に照射されてもよい。例えば、4台の投射部が前記画像撮影部200を中心に正四角形の形態に配置される場合、4つの格子パターン光が互いに異なる方向から前記測定対象物10上に照射されてもよい。また、前記第1照明ユニットは、8台の投射部を含んでもよく、画像を撮影するために格子パターン光を8つの方向から前記測定対象物10上に照射してもよい。
【0045】
前記第2照明ユニット450は、前記測定対象物10の2次元的画像を取得するための光を前記測定対象物10上に照射する。本実施形態では、前記第2照明ユニット450は、赤色照明452、緑色照明454、及び青色照明456を含んでもよい。例えば、前記赤色照明452、前記緑色照明454、及び前記青色照明456は、前記測定対象物10にそれぞれ赤色光、緑色光、及び青色光を照射するために前記測定対象物10の上部で円形状に配置されてもよく、図1に示すように異なる高さに配置されてもよい。
【0046】
前記画像取得部500は、前記画像撮影部200のカメラ210と電気的に接続され、前記カメラ210から前記第1照明ユニットによるパターン画像を取得して保存する。また、前記画像取得部500は、前記カメラ210から前記第2照明ユニット450による2次元的画像を取得して保存する。例えば、前記画像取得部500は、前記カメラ210で撮影された前記N個の第1パターン画像及び前記N個の第2パターン画像を受けて保存するイメージシステムを含んでもよい。
【0047】
前記モジュール制御部600は、前記測定ステージ部100、前記画像撮影部200、前記第1投射部300、及び前記第2投射部400と電気的に接続されて、これらを制御する。前記モジュール制御部600は、例えば、照明コントローラ、格子コントローラ、及びステージコントローラを含んでもよい。前記照明コントローラは、前記第1及び第2光源ユニット(310、410)をそれぞれ制御して光を発生させ、前記格子コントローラは、前記第1及び2格子移送ユニット(330、430)をそれぞれ制御して前記第1及び第2格子ユニット(320、420)を移動させる。前記ステージコントローラは、前記ステージ移送ユニット120を制御して前記ステージ110を上下左右に移動させる。
【0048】
前記中央制御部700は、前記画像取得部500、及び前記モジュール制御部600と電気的に接続されて、これらを制御する。具体的に、前記中央制御部700は、前記画像取得部500のイメージシステムから前記N個の第1パターン画像及び前記N個の第2パターン画像を受けて、これらを処理して前記測定対象物の3次元形状を測定する。また、前記中央制御部700は、前記モジュール制御部600の照明コントローラ、格子コントローラ、及びステージコントローラをそれぞれ制御してもよい。したがって、前記中央制御部は、イメージ処理ボード、制御ボード、及びインターフェースボードを含んでもよい。
【0049】
以下、上述のような3次元形状測定装置を利用して前記測定対象物10として採用されたプリント回路基板に搭載された所定の素子を検査する方法をより詳細に説明する。
【0050】
図2は、本発明の一実施形態に係るターミナル検査方法を示したフローチャートである。図3は、プリント回路基板上に形成されたターミナルと半田の一例を示す概略図である。
【0051】
図2及び図3を参照すると、本発明の一実施例に係るターミナルを検査するために、まず測定対象物を撮影して前記測定対象物のピクセル別にイメージデータを取得する(ステップS110)。
【0052】
前記測定対象物は、プリント回路基板900上に形成されたターミナル910と半田(solder)920である。
【0053】
前記測定対象物の各ピクセルによる前記イメージデータは、2次元イメージ測定によって取得される。例えば、前記測定対象物の撮影は、図1に示した3次元形状測定装置の2次元イメージ測定のためのランプ240または第2照明ユニット450を利用して行ってもよい。
【0054】
あるいは、前記各ピクセル別イメージデータは、3次元形状の測定のために得られたイメージデータを利用して取得してもよい。例えば、前記測定対象物の撮影は、図1に示した3次元形状測定装置の第1照明ユニットを利用して3次元イメージを撮影してもよい。前記第1照明ユニットは、上述したように第1及び第2投射部(300、400)を含むか、それ以上の照明部含むものであってもよい。具体的には、まず、前記投射部を利用して複数の方向から格子パターン光を前記測定対象物上に投射し、続いて前記測定対象物上に投射された前記格子パターン光の反射イメージを撮影して3次元イメージデータを取得する。この際、前記イメージデータは前記3次元イメージデータを平均化して取得してもよい。
【0055】
例えば、複数のM個の方向から格子パターン光を測定対象物にN回ずつ照射して前記測定対象物のピクセル別にM×N個のイメージデータを取得してもよい。ここで、NとMは2以上の自然数である。一方、前記M×N個のイメージデータのうちN個のイメージデータをM個の方向毎に平均化して、前記ピクセル別に前記M個の方向に対応するM個の平均イメージデータを算出する。
【0056】
その後、前記測定対象物のピクセル別に高さデータを取得する(ステップS120)。
【0057】
前記ピクセル別高さデータは、前記3次元形状測定のために得られたイメージデータを利用して取得されてもよい。例えば、前記高さデータは上述した図1に示した3次元形状測定装置の第1照明ユニットを利用して3次元イメージを撮影することによって取得されてもよい。本実施形態では、前記高さデータは、前記3次元イメージデータをバケットアルゴリズム(bucket algorithm)を利用して変換することで取得される。
【0058】
例えば、M個の方向毎に格子パターン光を測定対象物にN回ずつ投射して前記測定対象物のピクセル別にM個の高さデータが取得される。
【0059】
その後、前記測定対象物のピクセル別にビジビリティ(visibility)データを取得する(S130)。
【0060】
前記ビジビリティは、画像の明度(intensity)における平均(Ai(x,y))に対する振幅(Bi(x,y))の比率を示す。一般的に、反射率が増加すると前記ビジビリティは増加する。前記ビジビリティ(Vi(x、y))は次の数式(1)のように表される。
Vi(x,y)=Bi(x,y)/Ai(x,y)・・・・(1)
【0061】
多様な種類のパターン画像を取得するために、格子パターン光は多様な方向から前記プリント回路基板上に投射されてもよい。図1に示すように、前記画像取得部500が前記カメラ210で撮影されたN個のパターン画像からX−Y座標係の各位置(i(x,y))でのN個の明るさ信号(Ii1、 Ii2、…、IiN)を抽出し、N−バケットアルゴリズム(N−bucket algorithm)を利用して平均(Ai(x,y))及びビジビリティ(Vi(x,y))を算出する。例えば、N=3である場合と、N=4である場合は、それぞれ次の数式(2)〜(5)に示すようにビジビリティを算出することができる。N=3である場合は、次に示す数式(2)及び(3)によりビジビリティ(Vi(x,y))は算出される。
【数2】
【数3】
【0062】
N=4である場合は、次に示す数式(4)及び(5)によりビジビリティ(Vi(x,y))は算出される。
【数4】
【数5】
【0063】
前記ビジビリティ情報は、少なくとも2つの方向から前記測定対象物上に投射された格子パターン光により取得され、同様に、前記測定対象物のピクセル別に高さ情報が取得される(ステップS120)。すなわち、ピクセル別の前記ビジビリティ情報は、例えば、図1の3次元形状測定装置を利用することによって得られる測定対象のデータから容易に取得することが可能である。
【0064】
前記ピクセル別のビジビリティデータは、前記3次元形状の測定により得られる画像データを利用することにより取得される。例えば、前記ビジビリティデータは、上述のように、図1に示した前記3次元形状測定装置の前記第1照明ユニットを利用して3次元イメージを撮影することにより取得される。本実施形態では、前記ビジビリティデータは、ビジビリティ計算アルゴリズムを利用して前記3次元イメージデータを変換することにより取得される。
【0065】
例えば、前記測定対象物のピクセル別にM個のビジビリティデータを取得するために、M個の方向毎に格子パターン光を測定対象物上にN回ずつ投射する。
【0066】
その後、前記ピクセル別に取得された前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して結果値を算出する(ステップS140)。
【0067】
前記ピクセル別に取得された前記イメージデータ、前記高さデータ及び前記ビジビリティデータは複数の方向から測定されたデータであるため、前記複数のデータを適切に利用して結果値を算出することができる。
【0068】
図4は、図2のターミナル検査方法による結果値を算出する一例を示すフローチャートである。
【0069】
図4を参照すると、前記結果値を算出することにおいて、前記ピクセル別に前記複数の方向によるイメージデータからイメージデータ最大値を選択し(ステップS142)、前記ピクセル別に前記複数の方向による高さデータから高さデータ最大値を選択し(ステップS144)、前記ピクセル別に前記複数の方向によるビジビリティデータからビジビリティデータ最大値を選択する(ステップS146)。その後、前記ピクセル別に取得された前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値を乗算して前記結果値を算出する(ステップS148)。
【0070】
この際、ノイズを除去するために、前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きい値を除いた後に選択されてもよい。
【0071】
例えば、前記ピクセル別に前記M個の平均イメージデータから平均イメージデータ最大値を選択し、前記ピクセル別に前記M個の平均高さデータから平均高さデータ最大値を選択し、前記ピクセル別に前記M個の平均ビジビリティデータから平均ビジビリティデータ最大値を選択してもよい。その後、前記ピクセル別に取得された前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して結果値を算出する。
【0072】
上述のように各データの最大値を利用する場合、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、ターミナル領域における各データが半田領域に比べて大きい値を有するため、前記因子の乗算によって前記ターミナル領域と前記半田領域との間の結果値の差はより大きくなることがある。あるいは、前記各データの平均値を利用してもよい。
【0073】
次に、前記算出された結果値を利用してターミナル領域と半田領域とを区分する(ステップS150)。
【0074】
前記算出された結果値は、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータによって決められ、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、前記ターミナル領域が前記半田領域に比べて大きい値を有するようになるので、前記因子の乗算によって結果値の差はより大きくなる。
【0075】
特に、一般的に反射率が周辺に比べて大きい素子の場合、ビジビリティは周辺より更に大きい値を示すので、前記ターミナル領域は前記半田領域に比べて大きい結果値を有するようになり、これによってターミナル領域が更に強調される。
【0076】
一方、前記算出された結果値を利用して前記ターミナル領域と前記半田領域とを区分するために、まず前記ピクセル別に算出された結果値を少なくとも2つのグループに分類(classification)し、同一のグループに属するピクセルは全て連続して分布するように分類した後、前記分類されたグループを利用して前記ターミナル領域と前記半田領域を区分する。
【0077】
すなわち、前記ターミナル領域及び前記半田領域は、前記結果値によって互いに異なる領域に分類され、同一の領域は隣接して配置されるため、同一の領域は連続して分布するように分類される。
【0078】
上述のように、測定対象物のイメージデータ、高さデータ、及びビジビリティデータを取得し、取得したデータを乗算して結果値を算出し、この結果値を利用してターミナル領域と半田領域とを区分することにより、より正確にターミナル領域を確定することができ、より正確に前記ターミナルを検査することができる。
【0079】
また、高さに基づいて3次元的データを利用してターミナル領域を確定するため、2次元画像を利用してターミナル領域を確定する場合に比べて各領域の色の影響を少なくし、照明にも敏感でないため、より正確かつ容易に各領域を区別することができ、カメラのノイズが大きく影響することもない。
【0080】
また、前記イメージデータを3次元的データを利用して取得する場合、2次元イメージデータを取得しなくてもターミナル領域を容易に確定することができる。
【0081】
図5は、本発明の一実施形態に係る実装基板検査装置を示す概略図である。図6は、図5に示した実装基板検査装置を上から見た平面図である。図7は、図5に示した投射部及び第2照明部の位置関係を示す概略図である。
【0082】
図5、図6、及び図7を参照すると、本発明の一実施形態に係る実装基板検査装置1100は、検査対象物1110を移送するステージ1120と、検査対象物1110のイメージを撮影する画像撮影部1130と、検査対象物1110上に光を照射する第1照明部1140と、検査対象物1110上に格子パターン光を各々投射する複数の投射部1150と、及び検査対象物1110上に光を照射する第2照明部1160と、を含む。また、実装基板検査装置1100は、検査対象物1110上に光を照射する第3照明部1170及び前記構成要素を制御する制御部1180を更に含んでもよい。
【0083】
ステージ1120は、検査対象物1110を支持する。ステージ1120は、制御部1180の制御によってx軸及びy軸に沿って移動し、検査対象物1110を測定位置に移動させる。ステージ1120は、z軸に沿って移動してもよい。
【0084】
画像撮影部1130は、ステージ1120の上部に設置されて検査対象物1110のイメージを撮影する。画像撮影部1130は、ステージ1120の上部でステージ1120の基準面に対して垂直な方向に設置される。画像撮影部1130は、イメージ撮影のためのカメラ及び結像レンズを含む。検査対象物1110で反射される反射光は結像レンズによってCCDカメラまたはCMOSカメラに結像され、カメラは結像された反射光を受けてイメージを撮影する。画像撮影部1130は、例えば、第1照明部1140、投射部1150、及び第2照明部1160からそれぞれ検査対象物1110上に光を照射する時、検査対象物1110のイメージを撮影する。また、画像撮影部1130は、第3照明部1170から検査対象物1110上にカラー光を照射する時、検査対象物1110のイメージを撮影する。
【0085】
第1照明部1140は、画像撮影部1130と投射部1150との間に配置され、例えば、画像撮影部1130に隣接するように配置される。第1照明部1140は、半導体部品が実装されたプリント回路基板などの検査対象物1110の初期調整のための基準(fiducial)照明の機能を有する。第1照明部1140は、画像撮影部1130に隣接して配置され、検査対象物1110に対して実質的に垂直方向に光を照射する。第1照明部1140は、画像撮影部1130を囲むようにリング形状に形成される。例えば、第1照明部1140は、複数の発光ダイオードが円形のリング形状に配列された構造を有してもよい。第1照明部1140は、画像撮影部1130内に一体で形成されてもよい。
【0086】
複数の投射部1150は、ステージ1120の上部に一定の角度で傾くように設置される。各投射部1150は、検査対象物1110の3次元形状情報を取得するための照明であって、格子パターン光を発生して検査対象物1110上に投射する。投射部1150は、第1角度(a1)により検査対象物1110上に格子パターン光を投射する。すなわち、投射部1150は、検査対象物1110の平面に垂直な法線(β)を基準に第1角度(a1)だけ傾いた角度で格子パターン光を投射する。例えば、第1角度(a1)は約30゜である。
【0087】
投射部1150は、検査対象物1110の検査精度を高めるために多くの方向から格子パターン光を投射するように配置される。このために、投射部1150は、画像撮影部1130を中心に円周方向に沿って互いに一定間隔をあけて配置される。例えば、実装基板検査装置1100は、60゜の角度で離隔されるように配置された6個の投射部1150を含む。あるいは、実装基板検査装置1100は、2個、3個、4個、8個などの多様な個数の投射部1150を含んでもよい。複数の投射部1150は、一定時間の間隔をおいて検査対象物1110上に互いに異なる方向から格子パターン光を投射する。
【0088】
各投射部1150は、光を発生する光源1152及び格子素子1154を含んでもよい。光源1152で発生された光は、格子素子1154を通過して格子パターン光に変換される。格子素子1154は、位相遷移された格子パターン光を発生させるためにピエゾアクチュエータ(piezo actuator:PZT)などの格子移送装置を利用して2π/nずつn回移送される。ここで、nは2以上の自然数である。投射部1150は、格子素子1154をn回移送させながら移送毎に検査対象物1110上に格子パターン光を投射する。投射部1150は、格子素子1154を透過した格子パターン光の焦点を合わせて検査対象物1110上に透過する投射レンズ(図示せず)を更に含んでもよい。
【0089】
第2照明部1160は、図6に示すように、画像撮影部1130と投射部1150との間に設置され、例えば、第1照明部1140と投射部1150との間に設置される。すなわち、第2照明部1160は、実装基板検査装置1100を上から見た時、画像撮影部1130と投射部1150との間の空間に配置される。第2照明部1160は、検査対象物1110の検査領域を設定するための照明であって、特に、検査対象物1110に実装された半導体部品のターミナル1112の領域と半田1114の領域とを明確に区分するために用いられる。すなわち、ターミナル1112と半田1114との間の境界領域に該当するターミナル1112の終端位置を明確に把握するためにはコントラストを向上させる必要があり、コントラストを向上させるために投射角度を検査対象物1110に対して垂直に近いように設計することが望ましい。しかし、検査対象物1110に対して垂直に近い角度に照明を照射する第1照明部1140を使用するのみでは希望するコントラストを得ることは難しく、カメラの視野(field of View:FOV)の全体明るさの均一性が低下して、ターミナル1112の終端位置を区分のための照明として不適切である。これによって、コントラストを向上させるための第2照明部1160が画像撮影部1130と投射部1150との間に追加して設置される。第2照明部1160は、検査対象物1110の平面に垂直な法線(β)を基準に投射部1150より小さな角度で光を照射する。すなわち、第2照明部1160は、検査対象物1110の平面に垂直な法線(β)を基準に投射部1150の照射角度である第1角度(a1)より小さい第2角度(a2)で光を照射する。第2照明部1160の照射角度は垂直に近いほど良いが、検査装置の構造的特徴とコントラストの向上を考慮して決定される。実験を通じて確認した結果、第2照明部1160が約17゜〜約20゜の範囲の角度で光を照射する時、輝度均一性に問題がなく、コントラストが向上することを確認した。第2照明部1160は、画像撮影部1130を囲むリング形状に形成される。例えば、第2照明部1160は、複数の発光ダイオードがリング形状に配列された構造に形成されてもよい。
【0090】
上述のように、画像撮影部1130と投射部1150との間に第1照明部1140とは別にリング形状の第2照明部1160を追加して設置し、第2照明部1160は、投射部1150の照射角度より垂直に近い照射角度で光を検査対象物1110上に照射することで、コントラスト及び輝度均一性を向上させることができ、検査対象物1110に形成されたターミナル1112の領域と半田1114の領域とを明確に区分することができる。
【0091】
一方、実装基板検査装置1100は、検査対象物1110に隣接するように設置された第3照明部1170を更に含んでもよい。第3照明部1170は、検査対象物1110の検査領域を設定するか、又は、ローカル基準(local fiducial)のための照明であって、カラー光を発生させて検査対象物1110上に照射する。第3照明部1170は、互いに異なる色の光を発生させる第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176を含んでもよい。例えば、第1カラー照明部1172は赤色光を発生させ、第2カラー照明部1174は緑色光を発生させ、第3カラー照明部1176は青色光を発生させる。第1、第2、及び第3カラー照明部(1172、1174、1176)が発生させる光の色は様々に変更してもよい。
【0092】
第1、第2、及び第3カラー照明部(1172、1174、1176)は、各々リング形状に形成され、第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176に行くほど直径が大きくなるリング形状に形成される。よって、第2カラー照明部1174は、第1カラー照明部1172に比べて大きい照射角でカラー照明を照射し、第3カラー照明部1176は、第2カラー照明部1174に比べて大きい照射角でカラー照明を照射する。
【0093】
制御部1180は、上述の構成要素を全体的に制御する。具体的に、制御部1180は、検査対象物1110を検査位置に配置させるためにステージ1120の移送を制御する。制御部1180は、複数の投射部1150を順次動作させ、各投射部1150の格子素子1154を移送させながら移送毎に検査対象物1110上に格子パターン光を照射するように投射部1150を制御する。制御部1180は、検査対象物1110の調整または領域設定などのために光を照射する第1照明部1140及び第2照明部1160を制御し、カラー光を照射する第3照明部1170の照射動作を制御する。制御部1180は、第1照明部1140、第2照明部1160、投射部1150、及び第3照明部1170などの光の照射時、検査対象物1110のイメージを撮影するように画像撮影部1130を制御する。制御部1180は、第2照明部1160の照射を通じて撮影された検査対象物1110の第1イメージと、投射部1150の格子パターン光の投射を通じて撮影された検査対象物1110の第2イメージと、を利用して検査対象物1110のターミナル1112の領域と半田1114の領域とを区分する。
【0094】
図8は、検査対象物のターミナル領域と半田領域とを区分する過程を示す平面図である。図8において、(a)は半導体部品のターミナル1112が半田1114によって基板パッド1116に実装された状態のコントラストマップを示し、(b)は(a)に示したコントラストマップのI−I'線に沿って投映して得られたコントラスト情報を示し、(c)は(b)に示したコントラスト情報を微分して得られた微分情報を示す。
【0095】
図5及び図8を参照すると、制御部1180は、第2照明部1160の照明によって撮影された第1イメージからイメージデータを取得する。また、制御部1180は、投射部1150の格子パターン光の照射によって撮影された第2イメージからビジビリティデータ及び高さデータなどの3次元的データを取得する。例えば、前記高さデータは、前記第2イメージをバケットアルゴリズムを利用して変換することで取得され、前記ビジビリティデータは、前記第2イメージをビジビリティ算出アルゴリズムを利用して変換することで取得される。
【0096】
制御部1180は、前記第2イメージから取得された前記ビジビリティデータ及び前記高さデータの少なくとも一つと、前記第1イメージから取得された前記イメージデータとを組み合わせて、図8の(a)に示したような新しいコントラストマップを生成する。例えば、前記コントラストマップは、前記イメージデータと前記高さデータとをピクセル別に乗算するか、あるいは前記イメージデータと前記ビジビリティデータとをピクセル別に乗算するか、または前記イメージデータ、前記高さデータ、及び前記ビジビリティデータをピクセル別に乗算することにより生成される。
【0097】
複数の投射部1150を用いる場合、ピクセル別に取得された前記高さデータ及び前記ビジビリティデータは、複数の方向から測定された複数のデータであってもよい。よって、前記複数のデータを適切に活用することで、效果的な前記コントラストマップを生成することができる。例えば、前記コントラストマップを生成する際に、ピクセル別に複数の方向から取得された高さデータの中から高さデータ最大値を選択し、ピクセル別に複数の方向から取得されたビジビリティデータの中からビジビリティデータ最大値を選択する。その後、ピクセル別に選択された前記高さデータ最大値及び前記ビジビリティデータ最大値の中から少なくとも一つと、ピクセル別の前記イメージデータとを乗算して前記コントラストマップを生成してもよい。ノイズを除去するために、前記高さデータ最大値及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きい値を除いた後で選択される。
【0098】
上述のように、各データの最大値を利用する場合、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、ターミナル1112の領域が半田1114の領域に比べて更に大きい値を有することができるため、前記因子の乗算によってターミナル1112の領域と半田1114の領域のコントラストマップにおける差がより大きくなることがある。一方、コントラストマップを生成において、各データの最大値を利用する代わりに各データの平均値を利用してもよい。
【0099】
前記コントラストマップは、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータによって決定され、前記イメージデータ、前記高さデータ、及び前記ビジビリティデータは、ターミナル1112の領域が半田1114の領域に比べて大きい値を有するようになるため、前記因子の乗算によってターミナル1112の領域と半田1114の領域の差がより大きくなるようになる。特に、反射率が周辺に比べて大きい素子の場合にビジビリティは周辺より更に大きい値を示すため、ターミナル1112の領域は半田1114の領域に比べて大きい値を有するようになり、これによってターミナル1112の領域が更に強調される。
【0100】
その後、制御部1180は、生成されたコントラストマップの分析により検査対象物1110上に形成されたターミナル1112と半田1114の領域とを区分する。すなわち、制御部1180は、I−I’線に沿って図8の(a)に示されたコントラストマップを投映することにより、図8の(b)に示されたコントラスト情報を生成する。その後、制御部1180は、図8の(b)に示したコントラスト情報を微分して図8の(c)に示した微分情報を生成する。ターミナル1112の領域から半田1114の領域に進む時、コントラストが大幅に減少する。このため、制御部1180は、生成された微分情報から負の値として最大値を有する位置(A)を検出して、この位置をターミナル1112の領域と半田1114の領域とが接触する地点として判断することで、ターミナル1112の領域と半田1114の領域とを区分することができる。
【0101】
上述のように、第2照明部1160によりコントラストが向上した前記イメージデータと、前記高さデータ及び前記ビジビリティデータの少なくとも一つとを組み合わせて生成した前記コントラストマップを利用することで、ターミナル領域1112の領域と半田領域1114の領域とをより明確に区分することができる。
【0102】
図9は、本発明の一実施形態に係る実装基板検査方法を示すフローチャートである。
【0103】
図5及び図9を参照すると、検査対象物1110を検査するために、制御部1180は、検査対象物1110を測定位置に移送させるように、ステージ1120を移送させる(ステップS10)。
【0104】
検査対象物1110を検査位置に移送させた後、画像撮影部1130に隣接するように設置された第1照明部1140から検査対象物1110上に光を照射して、検査対象物1110を調整させる(ステップS20)。すなわち、第1照明部1140から照射された光を利用して検査対象物1110のイメージを画像撮影部1130で撮影し、調整マークなどが含まれた前記イメージを確認した後、ステージ1120の精密移送により検査対象物1110の検査位置を正確に調整する。
【0105】
検査対象物1110の調整が完了すると、第2照明部1160を利用して検査対象物1110の第1イメージを撮影する(ステップS30)。具体的に、画像撮影部1130と投射部1150との間に設置された第2照明部1160は、検査対象物1110に対して投射部1150の照射角度より小さな約17゜〜約20゜の角度で光を照射するように動作する。第2照明部1160により光を検査対象物1110上に照射した後、検査対象物1110の第1イメージを画像撮影部1130で撮影する。
【0106】
前記第1イメージの撮影とは別に、投射部1150を利用して検査対象物1110の第2イメージを撮影する(ステップS40)。具体的に、画像撮影部1130を中心に円周方向に沿って離隔されるように配置された複数の投射部1150を順次動作させて検査対象物1110上に対して約30゜の角度で格子パターン光を順次投射する。各投射部1150は、格子素子1154を移送させながら移送毎に検査対象物1110上に格子パターン光を投射する。格子パターン光を検査対象物1110上に投射した後、検査対象物1110の第2イメージは画像撮影部1130にて撮影される。
【0107】
その後、画像撮影部1130で撮影された前記第1イメージ及び前記第2イメージを利用して検査対象物1110のターミナル1112の領域と半田1114の領域とを区分する(ステップS50)。具体的に、制御部1180は、前記第2イメージから取得されたビジビリティデータ及び高さデータの少なくとも一つと前記第1イメージから取得されたイメージデータとを組み合わせてコントラストマップを生成する。その後、制御部1180は、生成されたコントラストマップの分析をして検査対象物1110上に形成されたターミナル1112の領域とソルダー1114の領域を区分する。すなわち、制御部1180は、前記コントラストマップを一方向に投映しながら位置によるコントラストの変化を示すコントラスト情報を生成し、前記コントラスト情報を微分してコントラストの変化が大きくなる位置を示すための微分情報を生成する。その後、制御部1180は、前記微分情報から負の値として最大値を有する位置を検出し、この位置をターミナル1112の領域と半田1114の領域とが接触する地点と判断して、ターミナル1112の領域と半田1114の領域とを区分する。
【0108】
投射部1150を利用した第2イメージの撮影及び第2照明部1160を利用した第1イメージの撮影とは別に、第3照明部1170を利用して別のイメージを撮影してもよい。具体的に、ステージ1120に隣接して設置された第3照明部1170は、検査対象物1110上にカラー光を照射するように動作する。第3照明部1170は、多段のリング形状に形成されて互いに異なる色の光を発生させる第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176を含んでもよい。第1カラー照明部1172、第2カラー照明部1174、及び第3カラー照明部1176は、同時にまたは順次にカラー光を照射する。第3照明部1170によりカラー光を検査対象物1110上に照射した後、検査対象物1110のカラーイメージを画像撮影部1130で撮影する。制御部1180は、画像撮影部1130で撮影された前記カラーイメージを検査対象物1110の検査領域を設定するかローカル基準のための情報として利用し、前記第2イメージと組合せて検査対象物1110の3次元形状をより精密に検査する情報として活用する。
【0109】
上述のように、本発明に係る実装基板検査装置1100は、画像撮影部1130と隣接するように設置された第1照明部1140とは別に画像撮影部1130と投射部1150との間にリング形状の第2照明部1160が設置され、第2照明部1160は投射部1150の照射角度より小さい約17゜〜約20゜の角度で光を検査対象物1110上に照射する。よって、第2照明部1160をリング形状に形成して視野の輝度均一性を向上させ、第2照明部1160の照射角度を投射部1150より垂直に近く設定して、撮影されたイメージのコントラストを向上させることができ、検査対象物1110上に形成されたターミナル1112の領域と半田1114の領域とを明確に区分して検査の信頼性を向上させることができる。
【0110】
以上、添付図面を参照しながら本発明の好適な実施形態について詳細に説明したが、本発明はかかる例に限定されない。本発明の属する技術の分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範囲内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本発明の技術的範囲に属するものと理解される。
【符号の説明】
【0111】
10 測定対象物
100 測定ステージ部
200 画像撮影部
300 第1投射部
400 第2投射部
450 第2照明ユニット
500 画像取得部
600 モジュール制御部
700 中央制御部
900 プリント回路基板
910 ターミナル
920 半田
1100 実装基板検査装置
1110 検査対象物
1120 ステージ
1130 画像撮影部
1140 第1照明部
1150 投射部
1160 第2照明部
1170 第3照明部
1180 制御部
【特許請求の範囲】
【請求項1】
測定対象物を撮影して前記測定対象物のピクセル別にイメージデータを取得し、
前記測定対象物のピクセル別に高さデータを取得し、
前記測定対象物のピクセル別にビジビリティ(visibility)データを取得し、
前記取得された前記イメージデータと、前記ピクセル別の前記高さデータ及び前記ビジビリティデータのうち少なくとも1つとを乗算して結果値を算出し、
前記算出された結果値を利用してターミナル領域を設定すること、を含むことを特徴とする検査方法。
【請求項2】
前記結果値は、前記ピクセル別に前記イメージデータと前記高さデータと前記ビジビリティデータとを乗算して算出することを特徴とする請求項1に記載の検査方法。
【請求項3】
前記ビジビリティデータは、前記ピクセル別に撮影された画像の明るさ(intensity)において平均(Ai(x、y))に対する振幅(Bi(x、y))の比率(Vi(x、y)=Bi(x、y)/Ai(x、y))であることを特徴とする請求項2に記載の検査方法。
【請求項4】
前記測定対象物のピクセル別に前記高さデータ及び前記ビジビリティデータを取得することは、
格子パターン光をN回前記測定対象物上に投射し、
前記測定対象物上にN回投射された前記格子パターン光により反射イメージデータをN回取得し、
前記取得されたN個の反射イメージデータを利用して前記高さデータを取得し、
前記反射イメージデータを利用して前記ビジビリティデータを取得すること、を含むことを特徴にする請求項1に記載の検査方法。
【請求項5】
前記測定対象物上に投射された前記格子パターン光により反射イメージデータをN回取得した後、
前記N個の反射イメージデータを平均化して前記イメージデータを取得すること、を含むことを特徴とする請求項4に記載の検査方法。
【請求項6】
前記測定対象物は複数の方向から撮影され、
前記測定対象物の前記ピクセル別イメージデータ、前記ピクセル別高さデータ、及び前記ピクセル別ビジビリティデータは、前記複数の方向別にそれぞれ取得され、
前記ピクセル別の前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して前記結果値を算出することは、
前記ピクセル別の前記複数の方向のイメージデータからイメージデータ最大値を選択し、
前記ピクセル別の前記複数の方向の高さデータから高さデータ最大値を選択し、
前記ピクセル別の前記複数の方向のビジビリティデータからビジビリティデータ最大値を選択し、
前記ピクセル別に選択された前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値を乗算して前記結果値を算出すること、を含むことを特徴とする請求項4に記載の検査方法。
【請求項7】
前記ピクセル別に取得された前記イメージデータと、前記高さデータ、及び前記ビジビリティデータのうち少なくとも1つとを乗算して前記結果値を算出することは、
前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きい否かを確認すること、を更に含むことを特徴とする請求項6に記載の検査方法。
【請求項8】
複数のM個の方向に格子パターン光を測定対象物にN回ずつ照射して前記測定対象物のピクセル別にM×N個のイメージデータ、M個の高さデータ、及びM個のビジビリティデータを取得し(NとMは、2以上の自然数)、
前記M×N個のイメージデータのうち、M個の方向別にN個のイメージデータをそれぞれ平均化して、前記ピクセル別に前記M個の方向に対応するM個の平均イメージデータを算出し、
前記ピクセル別に前記M個の平均イメージデータから平均イメージデータ最大値を選択し、
前記ピクセル別に前記M個の高さデータから高さデータ最大値を選択し、
前記ピクセル別に前記M個のビジビリティデータからビジビリティデータ最大値を選択し、
前記ピクセル別に選択された前記平均イメージデータ最大値、前記高さデータ最大値、前記ビジビリティデータ最大値を前記ピクセル別に乗算して結果値を算出し、
前記算出された結果値を利用してターミナル領域を区分すること、を含むことを特徴とする検査方法。
【請求項9】
前記算出された結果値を利用して前記ターミナル領域を区分することは、
前記ピクセル別に算出された結果値を少なくとも2つのグループに分類し、同一のグループに属するピクセルは、連続して分布するようにし、
前記分類されたグループを利用して半田領域から前記ターミナル領域を区分すること、を含むことを特徴とする請求項8に記載の検査方法。
【請求項10】
基板を移送するステージと、
前記基板を調整するための光を検査対象物上に照射する第1照明部と、
前記基板の高さデータを取得するための格子パターン光を前記検査対象物上に投射する投射部と、
前記基板に実装された部品のターミナル領域を設定するための光を前記検査対象物上に照射する第2照明部と、
前記第2照明部より前記基板の近く配置された第3照明部と、
前記第2照明部の光の照射によって前記基板の第1イメージを撮影し、前記投射部の格子パターン光の照射によって前記基板の第2イメージを撮影する画像撮影部と、
前記画像撮影部で撮影された前記第1イメージ及び前記第2イメージを利用して前記ターミナル領域を区分する制御部と、を含むことを特徴とする基板検査装置。
【請求項11】
前記第2照明部は、前記画像撮影部と前記投射部との間に設置されることを特徴とする請求項10に記載の基板検査装置。
【請求項12】
前記第2照明部は、前記基板の平面に垂直な法線に対して約17゜〜約20゜の角度範囲に光を照射することを特徴にする請求項10に記載の基板検査装置。
【請求項13】
前記制御部は、前記第2イメージから取得されたビジビリティデータ及び高さデータのうち少なくとも一つと、前記第1イメージから取得されたイメージデータとを利用してコントラストマップ(contrast map)を生成し、前記コントラストマップを分析して前記ターミナル領域を区分することを特徴にする請求項10に記載の基板検査装置。
【請求項14】
前記投射部は、前記基板上に格子パターン光をN回投射し、前記画像撮影部は前記基板上にN回投射された格子パターン光を撮影し、
前記ビジビリティデータは前記画像撮影部によって撮影された画像の明るさにおいて平均(Ai(x、y))に対する振幅(Bi(x、y))の比率(Vi(x、y)=Bi(x、y)/Ai(x、y))であることを特徴にする請求項13に記載の基板検査装置。
【請求項15】
前記投射部は、前記基板上に異なる方向から格子パターン光を投射する複数の投射部であり、
前記制御部は、前記複数の投射部による複数の高さデータ及び複数のビジビリティデータを取得することを特徴とする請求項14に記載の基板検査装置。
【請求項16】
前記制御部は、前記複数の高さデータの最大値、前記複数のビジビリティデータの最大値、及び前記イメージデータを乗算して前記コントラストマップを生成することを特徴とする請求項15に記載の基板検査装置。
【請求項17】
ステージの移送によって基板を測定位置に移送し、
第1光を前記基板上に照射して前記基板を調整し、
画像撮影部と投射部との間から第2光を前記基板上に照射して前記基板の第1イメージを撮影し、
前記投射部の格子パターン光を前記基板上にN回照射して前記基板の第2イメージを撮影し、
前記第2イメージからビジビリティデータ及び高さデータを取得し、
前記第1イメージ、前記ビジビリティデータ、及び前記高さデータを利用してコントラストマップを生成し、
前記コントラストマップを利用して前記基板上に実装された部品のターミナル領域を区分すること、を含むことを特徴とする基板検査方法。
【請求項1】
測定対象物を撮影して前記測定対象物のピクセル別にイメージデータを取得し、
前記測定対象物のピクセル別に高さデータを取得し、
前記測定対象物のピクセル別にビジビリティ(visibility)データを取得し、
前記取得された前記イメージデータと、前記ピクセル別の前記高さデータ及び前記ビジビリティデータのうち少なくとも1つとを乗算して結果値を算出し、
前記算出された結果値を利用してターミナル領域を設定すること、を含むことを特徴とする検査方法。
【請求項2】
前記結果値は、前記ピクセル別に前記イメージデータと前記高さデータと前記ビジビリティデータとを乗算して算出することを特徴とする請求項1に記載の検査方法。
【請求項3】
前記ビジビリティデータは、前記ピクセル別に撮影された画像の明るさ(intensity)において平均(Ai(x、y))に対する振幅(Bi(x、y))の比率(Vi(x、y)=Bi(x、y)/Ai(x、y))であることを特徴とする請求項2に記載の検査方法。
【請求項4】
前記測定対象物のピクセル別に前記高さデータ及び前記ビジビリティデータを取得することは、
格子パターン光をN回前記測定対象物上に投射し、
前記測定対象物上にN回投射された前記格子パターン光により反射イメージデータをN回取得し、
前記取得されたN個の反射イメージデータを利用して前記高さデータを取得し、
前記反射イメージデータを利用して前記ビジビリティデータを取得すること、を含むことを特徴にする請求項1に記載の検査方法。
【請求項5】
前記測定対象物上に投射された前記格子パターン光により反射イメージデータをN回取得した後、
前記N個の反射イメージデータを平均化して前記イメージデータを取得すること、を含むことを特徴とする請求項4に記載の検査方法。
【請求項6】
前記測定対象物は複数の方向から撮影され、
前記測定対象物の前記ピクセル別イメージデータ、前記ピクセル別高さデータ、及び前記ピクセル別ビジビリティデータは、前記複数の方向別にそれぞれ取得され、
前記ピクセル別の前記イメージデータ、前記高さデータ、及び前記ビジビリティデータを前記ピクセル別に乗算して前記結果値を算出することは、
前記ピクセル別の前記複数の方向のイメージデータからイメージデータ最大値を選択し、
前記ピクセル別の前記複数の方向の高さデータから高さデータ最大値を選択し、
前記ピクセル別の前記複数の方向のビジビリティデータからビジビリティデータ最大値を選択し、
前記ピクセル別に選択された前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値を乗算して前記結果値を算出すること、を含むことを特徴とする請求項4に記載の検査方法。
【請求項7】
前記ピクセル別に取得された前記イメージデータと、前記高さデータ、及び前記ビジビリティデータのうち少なくとも1つとを乗算して前記結果値を算出することは、
前記イメージデータ最大値、前記高さデータ最大値、及び前記ビジビリティデータ最大値は、それぞれ所定の基準値より大きい否かを確認すること、を更に含むことを特徴とする請求項6に記載の検査方法。
【請求項8】
複数のM個の方向に格子パターン光を測定対象物にN回ずつ照射して前記測定対象物のピクセル別にM×N個のイメージデータ、M個の高さデータ、及びM個のビジビリティデータを取得し(NとMは、2以上の自然数)、
前記M×N個のイメージデータのうち、M個の方向別にN個のイメージデータをそれぞれ平均化して、前記ピクセル別に前記M個の方向に対応するM個の平均イメージデータを算出し、
前記ピクセル別に前記M個の平均イメージデータから平均イメージデータ最大値を選択し、
前記ピクセル別に前記M個の高さデータから高さデータ最大値を選択し、
前記ピクセル別に前記M個のビジビリティデータからビジビリティデータ最大値を選択し、
前記ピクセル別に選択された前記平均イメージデータ最大値、前記高さデータ最大値、前記ビジビリティデータ最大値を前記ピクセル別に乗算して結果値を算出し、
前記算出された結果値を利用してターミナル領域を区分すること、を含むことを特徴とする検査方法。
【請求項9】
前記算出された結果値を利用して前記ターミナル領域を区分することは、
前記ピクセル別に算出された結果値を少なくとも2つのグループに分類し、同一のグループに属するピクセルは、連続して分布するようにし、
前記分類されたグループを利用して半田領域から前記ターミナル領域を区分すること、を含むことを特徴とする請求項8に記載の検査方法。
【請求項10】
基板を移送するステージと、
前記基板を調整するための光を検査対象物上に照射する第1照明部と、
前記基板の高さデータを取得するための格子パターン光を前記検査対象物上に投射する投射部と、
前記基板に実装された部品のターミナル領域を設定するための光を前記検査対象物上に照射する第2照明部と、
前記第2照明部より前記基板の近く配置された第3照明部と、
前記第2照明部の光の照射によって前記基板の第1イメージを撮影し、前記投射部の格子パターン光の照射によって前記基板の第2イメージを撮影する画像撮影部と、
前記画像撮影部で撮影された前記第1イメージ及び前記第2イメージを利用して前記ターミナル領域を区分する制御部と、を含むことを特徴とする基板検査装置。
【請求項11】
前記第2照明部は、前記画像撮影部と前記投射部との間に設置されることを特徴とする請求項10に記載の基板検査装置。
【請求項12】
前記第2照明部は、前記基板の平面に垂直な法線に対して約17゜〜約20゜の角度範囲に光を照射することを特徴にする請求項10に記載の基板検査装置。
【請求項13】
前記制御部は、前記第2イメージから取得されたビジビリティデータ及び高さデータのうち少なくとも一つと、前記第1イメージから取得されたイメージデータとを利用してコントラストマップ(contrast map)を生成し、前記コントラストマップを分析して前記ターミナル領域を区分することを特徴にする請求項10に記載の基板検査装置。
【請求項14】
前記投射部は、前記基板上に格子パターン光をN回投射し、前記画像撮影部は前記基板上にN回投射された格子パターン光を撮影し、
前記ビジビリティデータは前記画像撮影部によって撮影された画像の明るさにおいて平均(Ai(x、y))に対する振幅(Bi(x、y))の比率(Vi(x、y)=Bi(x、y)/Ai(x、y))であることを特徴にする請求項13に記載の基板検査装置。
【請求項15】
前記投射部は、前記基板上に異なる方向から格子パターン光を投射する複数の投射部であり、
前記制御部は、前記複数の投射部による複数の高さデータ及び複数のビジビリティデータを取得することを特徴とする請求項14に記載の基板検査装置。
【請求項16】
前記制御部は、前記複数の高さデータの最大値、前記複数のビジビリティデータの最大値、及び前記イメージデータを乗算して前記コントラストマップを生成することを特徴とする請求項15に記載の基板検査装置。
【請求項17】
ステージの移送によって基板を測定位置に移送し、
第1光を前記基板上に照射して前記基板を調整し、
画像撮影部と投射部との間から第2光を前記基板上に照射して前記基板の第1イメージを撮影し、
前記投射部の格子パターン光を前記基板上にN回照射して前記基板の第2イメージを撮影し、
前記第2イメージからビジビリティデータ及び高さデータを取得し、
前記第1イメージ、前記ビジビリティデータ、及び前記高さデータを利用してコントラストマップを生成し、
前記コントラストマップを利用して前記基板上に実装された部品のターミナル領域を区分すること、を含むことを特徴とする基板検査方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−69340(P2013−69340A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−285967(P2012−285967)
【出願日】平成24年12月27日(2012.12.27)
【分割の表示】特願2010−153005(P2010−153005)の分割
【原出願日】平成22年7月5日(2010.7.5)
【出願人】(506414749)コー・ヤング・テクノロジー・インコーポレーテッド (37)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2012−285967(P2012−285967)
【出願日】平成24年12月27日(2012.12.27)
【分割の表示】特願2010−153005(P2010−153005)の分割
【原出願日】平成22年7月5日(2010.7.5)
【出願人】(506414749)コー・ヤング・テクノロジー・インコーポレーテッド (37)
【Fターム(参考)】
[ Back to top ]