
基板移載装置
【課題】簡易な構成で、基板搬送部材に設けられた凸状の支持部に基板を支持させることができる基板移載装置を得る。
【解決手段】第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように、第一移動部材22を移動する。さらに、第一制御部38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる。また、リフター36を制御して搬送パレット18を上昇させて支持部20で基板12を支持させる。これにより、ベルトコンベア26と基板12とは分離(離間)する。このように、リフター36が搬送パレット18を上昇させるという簡易な構成で、搬送パレット18に設けられた支持部20に基板12が支持される(載せられる)。
【解決手段】第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように、第一移動部材22を移動する。さらに、第一制御部38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる。また、リフター36を制御して搬送パレット18を上昇させて支持部20で基板12を支持させる。これにより、ベルトコンベア26と基板12とは分離(離間)する。このように、リフター36が搬送パレット18を上昇させるという簡易な構成で、搬送パレット18に設けられた支持部20に基板12が支持される(載せられる)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板移載装置に関する。
【背景技術】
【0002】
特許文献1に記載のプリント板支持冶具(基板搬送部材)には、プリント板を下から支持する凸状の支持部が複数個設けられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−29756号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、簡易な構成で、基板搬送部材に設けられた支持部に基板を支持させることである。
【課題を解決するための手段】
【0005】
本発明の請求項1に基板移載装置は、基板の搬送方向上流側の第一搬送装置から搬送される前記基板の搬送経路の下に、前記基板を下側から支持する支持部を備えた基板搬送部材を移動させる第一移動部材と、前記第一移動部材に設けられ、前記第一搬送装置から搬送された前記基板を受け取る第一受取部材と、前記第一移動部材によって前記基板の搬送経路の下に移動した前記基板搬送部材を上昇させて、前記基板搬送部材に設けられた前記支持部で前記第一受取部材が受け取った前記基板を支持させる上昇手段と、前記第一移動部材に設けられ、前記上昇手段によって上昇した前記基板搬送部材を基板の搬送方向下流側の第二搬送装置に受け渡す第一受渡部材と、下記(1)または(2)のように制御する第一制御部と、を備えることを特徴とする。
(1)前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから前記上昇手段により前記基板搬送部材を上昇させて前記支持部が前記基板を支持した状態で、前記第一受渡部材が前記基板搬送部材を前記第二搬送装置に受け渡す
(2)前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取り、前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡す
本発明の請求項2に係る基板移載装置は、請求項1に記載の基板移載装置において、前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とが対応しない場合には、前記第一制御部は、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから、前記第一移動部材を幅方向に移動させて前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とを対応させてから前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡すように制御することを特徴とする。
【0006】
本発明の請求項3に係る基板移載装置は、請求項1又は2の何れか1項に記載の基板移載装置において、前記基板を支持しながら前記第二搬送装置から搬送された前記基板搬送部材を受け取る第二受取部材と、前記第二受取部材が受け取った前記基板搬送部材を下降させる下降手段と、前記下降手段によって下降する前記基板搬送部材に支持された前記基板を支持して前記基板搬送部材と前記基板とを離間させると共に、離間した前記基板を前記基板の搬送方向下流側の第三搬送装置に受け渡す第二受渡部材と、前記第二受取部材と前記第二受渡部材とを備えると共に、前記基板から離間した前記基板搬送部材を前記基板の搬送経路から退避させる第二移動部材と、を備え、前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第二搬送装置から搬送された前記基板搬送部材を前記第二受取部材が受け取ってから前記下降手段により前記基板搬送部材を下降させて前記基板搬送部材が前記基板から離間した状態で、前記第二受渡部材が前記基板を前記第三搬送装置に受け渡すように制御する第二制御部と、を備えることを特徴とする。
【0007】
本発明の請求項4に係る基板移載装置は、請求項3に記載において、前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取り、前記第二受渡部材が受け取った基板を前記第三搬送装置に受け渡すように制御することを特徴とする。
【0008】
本発明の請求項5に係る基板移載装置は、請求項3又は4に記載において、前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第二受取部材の幅方向の位置と前記第三搬送装置の幅方向の位置とが対応しない場合には、前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取ってから、前記第二移動部材を幅方向に移動させて前記第三搬送装置の幅方向の位置と前記第二受渡部材の幅方向の位置とを対応させてから前記第二受渡部材が受け取った前記基板を前記第三搬送装置に受け渡すように制御することを特徴とする。
【0009】
本発明の請求項6に係る基板移載装置は、請求項3〜5の何れか1項に記載において、前記第二移動部材によって前記基板の搬送経路から退避された前記基板搬送部材を、前記第一移動部材に引き渡す引渡装置が設けられることを特徴とする。
【発明の効果】
【0010】
本発明の請求項1の基板移載装置によれば、基板搬送部材を上昇させて、基板搬送部材に設けられた支持部で基板を支持させる上昇手段が設けられていない場合と比して、簡易な構成で、基板搬送部材に設けられた凸状の支持部に基板を支持させることができる(載せることができる)。また、全ての基板を基板搬送部材に載せて搬送する構成と比して、基板搬送部材を必要としない基板を搬送する場合には、基板を基板搬送部材に載せる工程を無くすことができる。
【0011】
本発明の請求項2の基板移載装置によれば、基板を第一受取部材が受け取った状態で、第一移動部材が幅方向に移動しない場合と比して、第一受取部材の幅方向の位置と第二搬送装置の幅方向の位置とが対応しない場合でも基板を基板搬送部材に載せる工程を無くすことができる。
【0012】
本発明の請求項3の基板移載装置によれば、第二受取部材が受け取った基板搬送部材を下降手段が下降させて第二受渡部材で基板を支持させる構成を有さない場合と比して、簡易な構成で、基板を基板搬送部材から分離(離間)させることができる(基板搬送部材を降ろすことができる)。
【0013】
本発明の請求項4の基板移載装置によれば、全ての基板を基板搬送部材に載せて搬送する構成と比して、基板搬送部材を必要としない基板を搬送する場合には、基板を基板搬送部材から分離(離間)する工程を無くすことができる。
【0014】
本発明の請求項5の基板移載装置によれば、基板を第二受渡部材が受け取った状態で、第二移動部材が幅方向に移動しない場合と比して、第二受取部材の幅方向の位置と第三搬送装置の幅方向の位置とが対応しない場合でも基板を基板搬送部材から分離(離間)する工程を無くすことができる。
【0015】
本発明の請求項6の基板移載装置によれば、第二移動部材によって基板の搬送経路から退避された基板搬送部材を、第一移動部材に引き渡す引渡装置が設けられていない場合と比して、基板搬送部材を再利用することができる(使い回すことができる)。
【図面の簡単な説明】
【0016】
【図1】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図2】本実施形態に係る基板移載装置を示した平面図である。
【図3】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図4】本実施形態に係る基板移載装置を示した平面図である。
【図5】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図6】本実施形態に係る基板移載装置を示した平面図である。
【図7】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図8】本実施形態に係る基板移載装置を示した平面図である。
【図9】本実施形態に係る基板移載装置が用いられる全体工程を示した工程図である。
【発明を実施するための形態】
【0017】
本発明の実施形態に係る基板移載装置の一例について図1〜図9に従って説明する。なお、図中に示す矢印UPは、鉛直方向上方を示す。
【0018】
(全体構成)
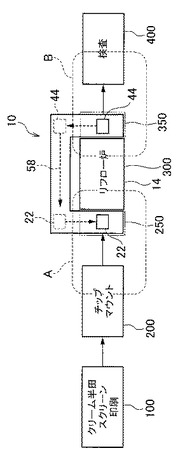
図9に示されるように、基板12(図1参照)に電子部品(例えば、チップ等)を実装(マウント)してハンダ付けする場合には、先ず、工程100では、基板12にクリームハンダがスクリーン印刷により塗布される。
【0019】
次に、工程200(チップマウント工程)では、クリームハンダが塗布された基板12に電子部品(チップ)が実装(マウント)される。より具体的には、電子部品実装装置を用いて、電子部品が、基板12のパッド上に塗布されたクリームハンダ上に電子部品の端子が位置するように基板12に置かれる。
【0020】
次に、工程300(ハンダ付け工程)では、電子部品が実装された基板12がリフロー炉14内に搬送され、リフロー炉14の熱により、クリームハンダが溶融して電子部品が基板12にハンダ付けされる。
【0021】
次に、工程400(検査工程)では、リフロー炉14内から搬送された基板12の外観(ハンダ付け状態等)を検査する。
【0022】
ここで、工程200と工程300との間には、基板12を上流工程の搬送装置から下流工程の搬送装置に載せ換える基板移載工程250が設けられ、工程300と工程400との間には、基板12を上流工程の搬送装置から下流工程の搬送装置に載せ換える基板移載工程350が設けられている。本実施形態に係る基板移載装置10は、主に、この基板移載工程250及び基板移載工程350で用いられる。
【0023】
(要部構成)
〔搬送パレット18を用いて基板12を搬送するように設定されている場合〕
先ず、工程300(図9参照)で基板12を搬送する際に、基板搬送部材の一例としての搬送パレット18(図1(B)参照)を用いて基板12を搬送するように設定されている場合について、基板移載工程250で用いられる構成(図9に示すA部の構成)について説明する。
【0024】
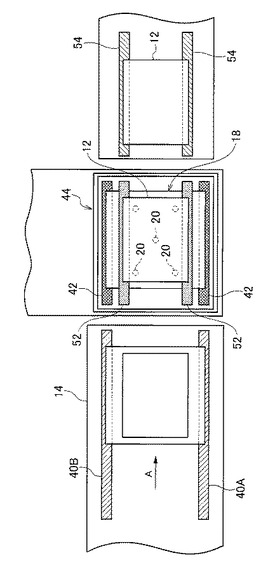
図2には、各工程における基板移載装置10の平面図が示され、図1には、各工程における基板移載装置10の断面図が示されている。
【0025】
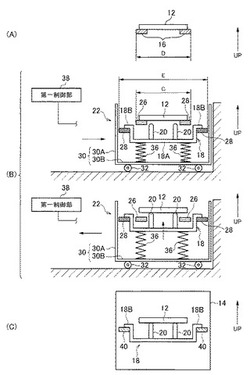
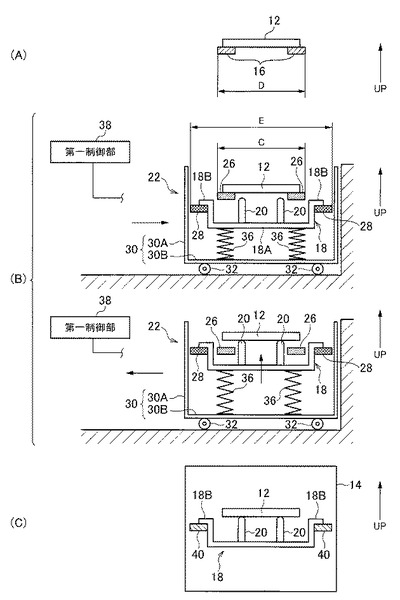
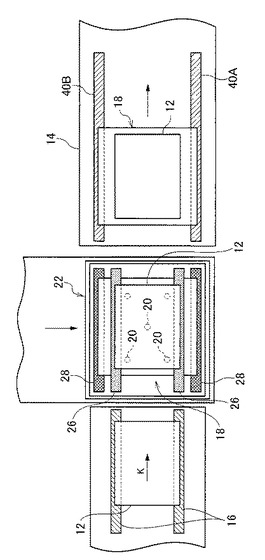
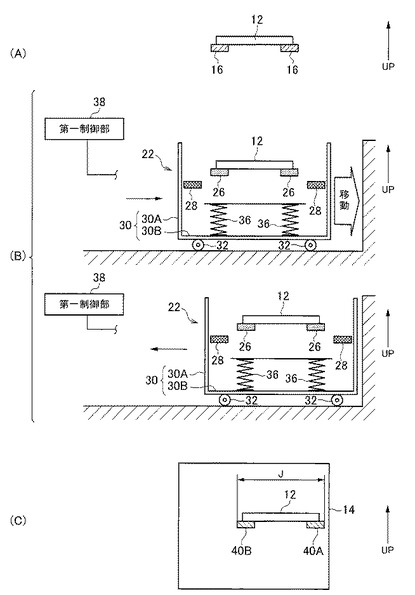
図1(A)、図2に示されるように、基板12に電子部品(図示省略)が実装される工程200(図9参照)では、基板12の搬送方向(図中矢印K方向、以下単に「搬送方向」と言う)に基板12を搬送する第一搬送装置の一例としての一対のベルトコンベア16が設けられている。一対のベルトコンベア16は、ローラ等を用いて無端状のベルトが回転する一般的なものであり、基板12の幅方向両端側を支持しながら基板12を搬送方向下流側に搬送するようになっている。なお、以下の説明では、平面視で基板12の搬送方向に対して直交する方向を幅方向と称する。ここで、平面視とは、図9に示したように、基板移載装置10を真上から見下ろした場合のことを意味する。
【0026】
さらに、図1(B)、図2に示されるように、基板12を移載する工程250(図9参照)には、ベルトコンベア16により搬送される基板12の搬送経路の下に、基板12を下側から支持する搬送パレット18を移動させる第一移動部材22が設けられている。
【0027】
詳細には、第一移動部材22は、搬送パレット18等を内部に保持する本体部30と、本体部30を搬送方向に対して交差(直交)する方向に移動可能にするコロ32とを備えている。さらに、本体部30は、搬送方向から見て上方が開放されたコ字状とされ、側板30Aと底板30Bとで構成されている。
【0028】
また、第一移動部材22は、基板12を移載するための移載位置(図9に示す実線)と、基板12の搬送経路から退避する退避位置(図9に示す破線)との間を図示せぬ駆動部材(例えば、コロ32に駆動力を与える正逆転モータ等)から駆動力をうけて往復移動可能とされている。
【0029】
さらに、この第一移動部材22の内部には、ベルトコンベア16によって搬送された基板12を受け取る第一受取部材の一例としての一対のベルトコンベア26が設けられている。
【0030】
具体的には、一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)は、一対のベルトコンベア16の幅寸法(図1(A)に示す寸法D)と同等とされている。そして、第一移動部材22が移載位置(図9に示す実線)に移動した状態では、平面視で、ベルトコンベア16とベルトコンベア26とは直線状に配置されるようになっている。さらに、ベルトコンベア16とベルトコンベア26との鉛直方向の高さは同等とされている。そして、ベルトコンベア16の回転駆動と同期してベルトコンベア26が回転することで、ベルトコンベア16によって搬送された基板12をベルトコンベア26が受け取るようになっている。
【0031】
さらに、この第一移動部材22の内部には、前述した搬送パレット18が設けられ、この搬送パレット18は、搬送方向から見ると上方が開放されたコ字状とされ、搬送パレット18の底板18Aには、鉛直方向に延びる支持部20の基端部が固定されている。また、搬送パレット18の開放縁部には、幅方向外側に突出する鍔部18Bが設けられている。
【0032】
さらに、搬送パレット18の鍔部18Bが載せられると共に、回転駆動して搬送パレット18を後工程へ搬送する(受け渡す)第一受渡部材の一例としての一対のベルトコンベア28が搬送方向に延びて設けられている。具体的には、一対のベルトコンベア28の幅寸法(図1(B)に示す寸法E)は、一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)より大きくされている。そして、図2に示されるように、平面視で、ベルトコンベア28は、ベルトコンベア26と重ならないように配置されている。
【0033】
また、図1(B)に示されるように、搬送パレット18の底板18Aと第一移動部材22の底板30Bとの間には、搬送パレット18を上昇させて、搬送パレット18に設けられた支持部20の先端部で基板12を支持させる上昇手段の一例としてのリフター36が設けられている。より具体的には、リフター36の駆動源として油圧または空気圧シリンダを用いる場合は、一対のベルトコンベア28を支持する図示しない支持フレームの下面にシリンダロッドを固定し、底板30Bの上面にシリンダ本体を固定する。なお、本実施例では、リフター36は、搬送パレット18を上昇させるのに伴なってベルトコンベア28も同様に上昇させるようになっている。また、本実施形態では、リフター36を第一移動部材22の内部に設けたが、リフターを第一移動部材22の外部、例えば、床面等に固定してもよい。
【0034】
一方、図1(C)、図2に示されるように、リフロー炉14内には、搬送方向に延びる第二搬送装置の一例としての一対のベルトコンベア40が設けられている。
【0035】
一対のベルトコンベア40は、固定された一方のベルトコンベア40Aと、幅方向に移動可能とされた他方のベルトコンベア40Bとを備えている。そして、図2に示されるように、搬送パレット18を用いて基板12を搬送する場合には、平面視で、ベルトコンベア40とベルトコンベア28とは直線状に配置される。一方、図6に示されるように、搬送パレット18を用いずに基板12を搬送する場合には、他方のベルトコンベア40Bを移動させて、一対のベルトコンベア40の幅寸法は、一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされる。
【0036】
そして、図2に示されるように、搬送パレット18を用いて基板12を搬送する場合には、ベルトコンベア40の回転駆動と同期してベルトコンベア28が回転することで、ベルトコンベア28によって搬送された搬送パレット18をベルトコンベア40が受け取るようになっている。
【0037】
また、このように、ベルトコンベア40が搬送パレット18を搬送するように設定されている場合に、ベルトコンベア16から搬送された基板12をベルトコンベア26が受け取ってからリフター36により搬送パレット18を上昇させて支持部20で基板12を支持した状態で、ベルトコンベア28が搬送パレット18をベルトコンベア40に受け渡すように制御する第一制御部38が設けられている。
【0038】
具体的には、図1、図2に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア28の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第一制御部38は、第一移動部材22を制御して第一移動部材22を移載位置へ移動した後、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる。次に、第一制御部38は、リフター36を制御して搬送パレット18を上昇させて支持部20で基板12を支持させる。次に、第一制御部38は、ベルトコンベア28の回転駆動を制御して、搬送パレット18をベルトコンベア40に受け渡すようになっている。
【0039】
次に、図9に示されるように、搬送パレット18に支持されながらリフロー炉14内を搬送された基板12を移載する基板移載工程350で用いられる構成(図9に示すB部の構成)について説明する。
【0040】
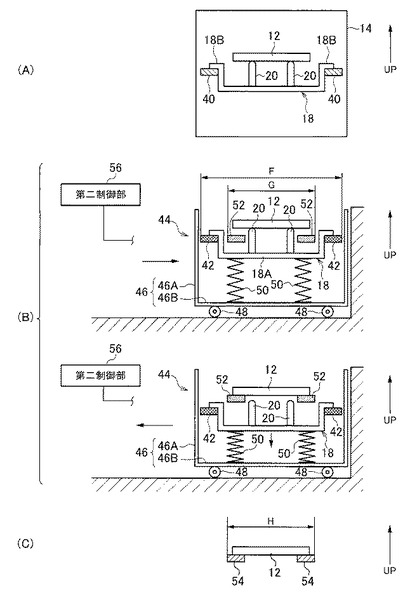
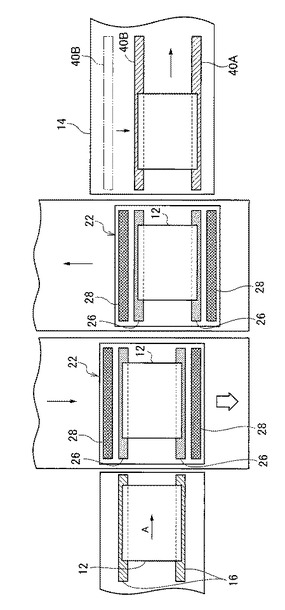
さらに、図3(B)、図4に示されるように、基板12を移載する工程350(図9参照)には、ベルトコンベア40(図3(A)参照)により搬送される搬送パレット18の搬送経路に、搬送パレット18を受け取る第二受取部材の一例としての一対のベルトコンベア42を備えた第二移動部材44が配置されている。
【0041】
詳細には、第二移動部材44は、ベルトコンベア42等を内部に上下動可能に保持する本体部46と、本体部46を搬送方向に対して交差(直交)する方向に移動可能するコロ48とを備えている。さらに、本体部46は、搬送方向から見て上方が開放されたコ字状とされ、側板46Aと底板46Bとで構成されている。
【0042】
また、第二移動部材44は、基板12を移載するための移載位置(図9に示す実線)と、基板12の搬送経路から退避する退避位置(図9に示す破線)との間を図示せぬ駆動部材(例えば、コロ48に駆動力を与える正逆転モータ等)から駆動力をうけて往復移動可能とされている。
【0043】
詳細には、前述したベルトコンベア42は、第二移動部材44の内部に設けられ、一対のベルトコンベア42の幅寸法(図3(B)に示す寸法F)は、一対のベルトコンベア40の幅寸法と同等とされている。そして、第二移動部材44が移載位置(図9に示す実線)に移動した状態では、平面視で、ベルトコンベア40とベルトコンベア42とは直線状に配置されるようになっている。
【0044】
さらに、ベルトコンベア42とベルトコンベア40との鉛直方向の高さは同等とされている。そして、ベルトコンベア40の回転駆動と同期してベルトコンベア42が回転することで、ベルトコンベア40によって搬送された搬送パレット18をベルトコンベア42が受け取るようになっている。
【0045】
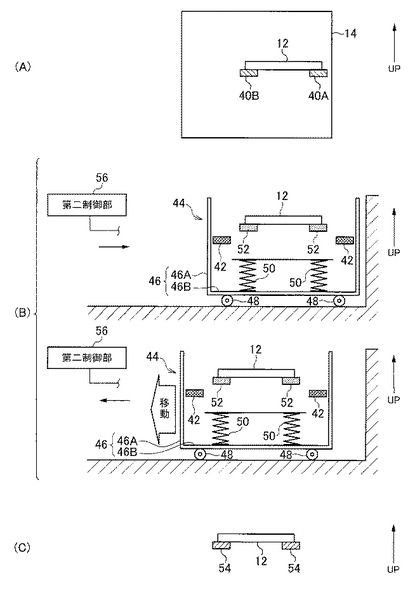
また、図3(B)に示されるように、ベルトコンベア42が受け取った搬送パレット18の底板18Aと第二移動部材44の底板46Bとの間には、搬送パレット18を下降させる下降手段の一例としてのリフター50が設けられている。より具体的には、リフター50の駆動源として油圧または空気圧シリンダを用いる場合は、一対のベルトコンベア42を支持する図示しない支持フレームの下面にシリンダロッドを固定し、底板46Bの上面にシリンダ本体を固定する。なお、本実施例では、リフター50は、搬送パレット18を下降させるのに伴なってベルトコンベア42も同様に下降させるようになっている。また、本実施形態では、リフター50を第二移動部材44の内部に設けたが、リフターを第二移動部材44の外部、例えば、床面等に固定してもよい。
【0046】
さらに、第二移動部材44の内部には、リフター50によって下降する搬送パレット18に支持されていた基板12を受け取って、搬送パレット18の支持部20と基板12とを分離(離間)させる第二受取部材の一例としての一対のベルトコンベア52が設けられている。そして、図3(C)、図4に示されるように、ベルトコンベア52は、基板12を工程400に設けられた第三搬送手段の一例としての一対のベルトコンベア54に受け渡すようになっている。
【0047】
詳細には、一対のベルトコンベア52の幅寸法(図3(B)に示す寸法G)と一対のベルトコンベア54の幅寸法(図3(C)に示す寸法H)は、一対のベルトコンベア16の幅寸法(図1(A)に示す寸法D)及び一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされている。そして、第二移動部材44が移載位置(図9に示す実線)に移動した状態では、平面視で、ベルトコンベア52とベルトコンベア54とは直線状に配置されるようになっている。
【0048】
さらに、ベルトコンベア52とベルトコンベア54との鉛直方向の高さは同等とされている。そして、ベルトコンベア54の回転駆動と同期してベルトコンベア52が回転することで、ベルトコンベア52が基板12をベルトコンベア54に受け渡すようになっている。
【0049】
また、このように、ベルトコンベア40が搬送パレット18を搬送するように設定されている場合に、ベルトコンベア40から搬送された搬送パレット18をベルトコンベア42が受け取ってからリフター50により搬送パレット18を下降させて搬送パレット18が基板12から離間してベルトコンベア52が基板12を支持した状態で、ベルトコンベア52が基板12をベルトコンベア54に受け渡すように制御する第二制御部56が設けられている。
【0050】
具体的には、図3、図4に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア28の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第二制御部56は、第二移動部材44を制御して第二移動部材44を移載位置へ移動した後、ベルトコンベア42の回転駆動を制御して、ベルトコンベア40によって搬送された搬送パレット18をベルトコンベア42に受け取らせる。次に、第二制御部56は、リフター50を制御して搬送パレット18を下降させてベルトコンベア52で基板12を支持させる。次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡す。
【0051】
一方、図9に示されるように、基板移載装置10には、退避位置に配置される第二移動部材44(図9破線参照)に支持された搬送パレット18を退避位置に配置される第一移動部材22(図9破線参照)に引き渡す引渡装置58が設けられている。
【0052】
〔搬送パレット18を用いず基板12を搬送するように設定されている場合〕
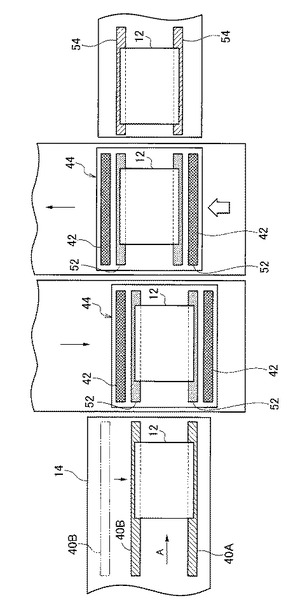
次に、工程300で基板を搬送する際に、搬送パレット18(図1(B)参照)を用いず基板12を搬送するように設定されている場合について、基板移載工程250で用いられる構成(図9に示すA部の構成)について図5〜図8を用いて説明する。尚、図6の中央には第一移動部材22が左右2つ並んで図示されているが、説明を分かりやすくするために第一移動部材22の2つの状態を対比し易くしたものである。このため、実際には、第一移動部材は、図6の中央に図示されたように並んで存在しているのではなく、移載位置において左右2つの内いずれか一方の状態にある。図8も同様である。すなわち、図8の中央には第二移動部材44が左右2つ並んで図示されているが、説明を分かりやすくするために第二移動部材44の2つの状態を対比し易くしたものである。このため、実際には、第二移動部材は、図8の中央に図示されたように並んで存在しているのではなく、移載位置において左右2つの内いずれか一方の状態にある。 図5(A)(B)(C)、図6に示されるように、第一制御部38は、ベルトコンベア16から搬送された基板12をベルトコンベア26が受け取ってから、第一移動部材22を幅方向に移動させる。ベルトコンベア26の幅方向の位置とベルトコンベア40の幅方向の位置とが対応してから、ベルトコンベア26が受け取った基板12をベルトコンベア40に受け渡すように制御するようになっている。
【0053】
具体的には、図5、図6に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされている場合には、第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように第一移動部材22を移動させる。次に、第一制御部材38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる(図5(B)の上の図、第一移動部材22が図6の中央左側の図の場合)。次に、第一制御部38は、平面視でベルトコンベア26とベルトコンベア40とが直線状に配置されるように第一移動部材22を移動させる(図5(B)の下の図、第一移動部材22が図6の中央右側の図の場合)。次に、第一制御部38は、ベルトコンベア26の回転駆動を制御して、基板12をベルトコンベア40に受け渡すようになっている(図5(C)、第一移動部材22が図6の中央右側の図の場合)。
【0054】
次に、図9に示されるように、搬送パレット18に支持されながらリフロー炉14内を搬送された基板12を移載する基板移載工程350で用いられる構成(図9に示すB部の構成)について説明する。
【0055】
図7(A)(B)(C)、図8に示されるように、第二制御部56は、ベルトコンベア40から搬送された基板12をベルトコンベア52が受け取ってから、第一移動部材22を幅方向に移動させる。そして、ベルトコンベア52の幅方向の位置とベルトコンベア54の幅方向の位置とが対応してから、ベルトコンベア52が受け取った基板12をベルトコンベア54に受け渡すように制御するようになっている。
【0056】
具体的には、図7(A)、図8に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされている場合には、第二制御部56は、平面視でベルトコンベア40とベルトコンベア52とが直線状に配置されるように第二移動部材44を移動させる。次に、第二制御部材56は、ベルトコンベア52の回転駆動を制御して、ベルトコンベア40によって搬送された基板12をベルトコンベア52に受け取らせる(図7(B)の上の図、第二移動部材44が図8の中央左側の図の場合)。次に、第二制御部56は、平面視でベルトコンベア52とベルトコンベア54とが直線状に配置されるように第二移動部材44を移動させる(図7(B)の下の図、第二移動部材44が図8の中央右側の図の場合)。次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡すようになっている(図7(C)、第二移動部材44が図8の中央右側の図の場合)。
【0057】
なお、第一制御部38及び第二制御部56以外の制御については、搬送パレット18の使用の要否に関わらず共通の制御であり、図示せぬ共通の制御部が制御するものである。
(要部構成の作用)
次に、基板移載装置10の作用について説明する。
【0058】
〔搬送パレット18を用いて基板12を搬送するように設定されている場合〕
図1(A)(B)、図2に示されるように、工程200(図9参照)で電子部品が実装されてベルトコンベア16により搬送される基板12の搬送経路に、第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように、第一移動部材22を移動する。つまり、第一制御部38は、第一移動部材22を移載位置に移動する。
【0059】
さらに、ベルトコンベア40の幅寸法が、ベルトコンベア28の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第一制御部38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる(図1(B)上の図)。
【0060】
また、第一制御部38は、リフター36を制御して搬送パレット18を上昇させて支持部20で基板12を支持させる。これにより、ベルトコンベア26と基板12とは分離(離間)する(図1(B)下の図)。
【0061】
さらに、第一制御部38は、ベルトコンベア28の回転駆動を制御して、搬送パレット18をリフロー炉14に設けられたベルトコンベア40に受け渡す(図1(C))。
【0062】
搬送パレット18をベルトコンベア40に受け渡すと、第一移動部材22は、第一制御部38によって制御されて、移載位置(図9の実線参照)から退避位置(図9の破線参照)へ移動する。
【0063】
図1(C)、図2に示されるように、リフロー炉14内をベルトコンベア40で搬送されることで、搬送パレット18の支持部20に支持された基板12に実装された電子部品が基板12にハンダ付けされる。
【0064】
図3(A)(B)、図4に示されるように、第二制御部56は、平面視でベルトコンベア40とベルトコンベア42とが直線状に配置されるように、第二移動部材44を移動する。つまり、第二制御部56は、第二移動部材44を移載位置に移動する(図4)。
【0065】
さらに、第二制御部56は、移載位置に移動した第二移動部材44に備えられたベルトコンベア42の回転駆動を制御して、ベルトコンベア40によって搬送された搬送パレット18をベルトコンベア42に受け取らせる(図3(B)上の図)。
【0066】
さらに、第二制御部56は、リフター50を制御して搬送パレット18を下降させてベルトコンベア52で基板12を支持させる。これにより、搬送パレット18と基板12とは分離(離間)する(図3(B)下の図)。
【0067】
また、図3(B)(C)、図4に示されるように、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡す。
【0068】
基板12をベルトコンベア54に受け渡すと、搬送パレット18を支持する第二移動部材44は、移載位置(図9の実線参照)から退避位置(図9の破線参照)へ移動する。
【0069】
図9に示されるように、引渡装置58は、退避位置に配置される第二移動部材44(図9破線参照)に支持された搬送パレット18を退避位置に配置される第一移動部材22(図9破線参照)に引き渡す。
【0070】
〔搬送パレット18を用いず基板12を搬送するように設定されている場合〕
図5(A)(B)、図6に示されるように、工程200(図9参照)で電子部品が実装されてベルトコンベア16により搬送される基板12の搬送経路に、第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように、第一移動部材22を移動する。つまり、第一制御部38は、第一移動部材22を移載位置に移動する(第一移動部材22が図6の中央左側の図の場合)。なお、搬送パレット18を用いないため、第一移動部材22の内部には搬送パレット18が設けられていない。
【0071】
さらに、ベルトコンベア40の幅寸法が、ベルトコンベア16の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第一制御部38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる(第一移動部材22が図6の中央左側の図の場合)。
【0072】
次に、第一制御部38は、平面視でベルトコンベア26とベルトコンベア40とが直線状に配置されるように第一移動部材22を移動する(第一移動部材22が図6の中央右側の図の場合)。
【0073】
次に、第一制御部38は、ベルトコンベア26の回転駆動を制御して、基板12をベルトコンベア40に受け渡す(第一移動部材22が図6の中央右側の図の場合)。
【0074】
図5(C)、図6に示されるように、リフロー炉14内をベルトコンベア40で搬送されることで、基板12に実装された電子部品が基板12にハンダ付けされる。
【0075】
図7(A)(B)、図8に示されるように、第二制御部56は、平面視でベルトコンベア40とベルトコンベア52とが直線状に配置されるように第二移動部材44を移動させる(第一移動部材44が図8の中央左側の図の場合)。
【0076】
次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、ベルトコンベア40によって搬送された基板12をベルトコンベア52に受け取らせる(第一移動部材44が図8の中央左側の図の場合)。
【0077】
次に、第二制御部56は、平面視でベルトコンベア52とベルトコンベア54とが直線状に配置されるように第一移動部材22を移動させる(第一移動部材44が図8の中央右側の図の場合)。
【0078】
次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡す(第一移動部材44が図8の中央右側の図の場合)。
【0079】
以上説明したように、リフター36が搬送パレット18を上昇させるという簡易な構成で、搬送パレット18に設けられた支持部20に基板12が支持される(載せられる)。
【0080】
また、リフター50が搬送パレット18を下降させることで、簡易な構成で、基板12が搬送パレット18から離間する(基板12の搬送パレット18による支持が解除される)。
【0081】
また、搬送パレット18を用いない設定の場合には、搬送パレット18を用いることなく、基板12がリフロー炉14内を搬送されるため、基板12を搬送パレット18に乗降させる工程が無くなる。つまり、厚さが厚い基板は、薄い基板に比べて、剛性が高いため、リフロー炉の熱による基板の反りが小さいので、厚さが厚い基板を搬送する場合には、搬送パレットを用いる必要が無い。このように、厚い基板の場合には、基板を搬送パレット18に乗降させる工程が無くなる。
【0082】
また、基板12を受け取った後、第一移動部材22及び第二移動部材44を移動させることで、一方のベルトコンベア40Aを固定し、他方のベルトコンベア40Bを幅方向に移動させて一対のベルトコンベア40の幅寸法を一対のベルトコンベア16の幅寸法と同等にした場合でも、基板12を搬送パレット18に乗降させる工程が無くなる。
【0083】
また、引渡装置58が、第二移動部材44によって基板12の搬送経路から退避された搬送パレット18を退避位置に移動した第二移動部材44から受取り、退避位置に移動した第一移動部材22に引き渡す。このため、搬送パレット18が再利用される(使い回される)。引渡装置58は、例えば、ローラ等を用いて無端状のベルトが回転する一般的な一対のベルトコンベアを採用することができる。この場合、ベルトコンベアの幅および高さは、搬送パレット18を搬送できる幅および高さにする。そして、搬送パレット18を待避位置の第二移動部材44から引渡装置58に移載する場合は、ベルトコンベア42および引渡装置58のベルトコンベアを動作させる。また、搬送パレット18を引渡装置58から待避位置の第一移動部材22に移載する場合は、ベルトコンベア28および引渡装置58のベルトコンベアを動作させる。
【0084】
なお、本発明を特定の実施形態について詳細に説明したが、本発明はかかる実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかである。
【0085】
例えば、上記実施形態では、一方のベルトコンベア40Aを固定し、他方のベルトコンベア40Bを幅方向に移動させて一対のベルトコンベア40の幅寸法を一対のベルトコンベア16、54の幅寸法と同等したが、両方のベルトコンベアを移動させて一対のベルトコンベア40の幅寸法を一対のベルトコンベア16、54の幅寸法と同等し、さらに、一対のベルトコンベア40の幅方向の位置と一対のベルトコンベア16、54の幅方向の位置とを対応させてもてもよい。この場合には、基板12を受け取った後、第一移動部材22及び第二移動部材44の移動が無くなる。
【0086】
また、上記実施形態では、図5および図7の状態において、搬送パレット18が無い状態を示したが、搬送パレット18は使わないので、搬送パレット18があっても良い。
【符号の説明】
【0087】
10 基板移載装置
12 基板
16 ベルトコンベア(第一搬送装置の一例)
18 搬送パレット(基板搬送部材の一例)
20 支持部
22 第一移動部材
26 ベルトコンベア(第一受取部材の一例)
28 ベルトコンベア(第一受渡部材の一例)
36 リフター(上昇手段の一例)
38 第一制御部
40 ベルトコンベア(第二搬送装置の一例)
40A ベルトコンベア(第二搬送装置の一例)
40B ベルトコンベア(第二搬送装置の一例)
42 ベルトコンベア(第二受取部材の一例)
44 第二移動部材
50 リフター(下降手段)
52 ベルトコンベア(第二受渡部材の一例)
54 ベルトコンベア(第三搬送装置の一例)
56 第二制御部
58 引渡装置
【技術分野】
【0001】
本発明は、基板移載装置に関する。
【背景技術】
【0002】
特許文献1に記載のプリント板支持冶具(基板搬送部材)には、プリント板を下から支持する凸状の支持部が複数個設けられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−29756号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、簡易な構成で、基板搬送部材に設けられた支持部に基板を支持させることである。
【課題を解決するための手段】
【0005】
本発明の請求項1に基板移載装置は、基板の搬送方向上流側の第一搬送装置から搬送される前記基板の搬送経路の下に、前記基板を下側から支持する支持部を備えた基板搬送部材を移動させる第一移動部材と、前記第一移動部材に設けられ、前記第一搬送装置から搬送された前記基板を受け取る第一受取部材と、前記第一移動部材によって前記基板の搬送経路の下に移動した前記基板搬送部材を上昇させて、前記基板搬送部材に設けられた前記支持部で前記第一受取部材が受け取った前記基板を支持させる上昇手段と、前記第一移動部材に設けられ、前記上昇手段によって上昇した前記基板搬送部材を基板の搬送方向下流側の第二搬送装置に受け渡す第一受渡部材と、下記(1)または(2)のように制御する第一制御部と、を備えることを特徴とする。
(1)前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから前記上昇手段により前記基板搬送部材を上昇させて前記支持部が前記基板を支持した状態で、前記第一受渡部材が前記基板搬送部材を前記第二搬送装置に受け渡す
(2)前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取り、前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡す
本発明の請求項2に係る基板移載装置は、請求項1に記載の基板移載装置において、前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とが対応しない場合には、前記第一制御部は、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから、前記第一移動部材を幅方向に移動させて前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とを対応させてから前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡すように制御することを特徴とする。
【0006】
本発明の請求項3に係る基板移載装置は、請求項1又は2の何れか1項に記載の基板移載装置において、前記基板を支持しながら前記第二搬送装置から搬送された前記基板搬送部材を受け取る第二受取部材と、前記第二受取部材が受け取った前記基板搬送部材を下降させる下降手段と、前記下降手段によって下降する前記基板搬送部材に支持された前記基板を支持して前記基板搬送部材と前記基板とを離間させると共に、離間した前記基板を前記基板の搬送方向下流側の第三搬送装置に受け渡す第二受渡部材と、前記第二受取部材と前記第二受渡部材とを備えると共に、前記基板から離間した前記基板搬送部材を前記基板の搬送経路から退避させる第二移動部材と、を備え、前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第二搬送装置から搬送された前記基板搬送部材を前記第二受取部材が受け取ってから前記下降手段により前記基板搬送部材を下降させて前記基板搬送部材が前記基板から離間した状態で、前記第二受渡部材が前記基板を前記第三搬送装置に受け渡すように制御する第二制御部と、を備えることを特徴とする。
【0007】
本発明の請求項4に係る基板移載装置は、請求項3に記載において、前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取り、前記第二受渡部材が受け取った基板を前記第三搬送装置に受け渡すように制御することを特徴とする。
【0008】
本発明の請求項5に係る基板移載装置は、請求項3又は4に記載において、前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第二受取部材の幅方向の位置と前記第三搬送装置の幅方向の位置とが対応しない場合には、前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取ってから、前記第二移動部材を幅方向に移動させて前記第三搬送装置の幅方向の位置と前記第二受渡部材の幅方向の位置とを対応させてから前記第二受渡部材が受け取った前記基板を前記第三搬送装置に受け渡すように制御することを特徴とする。
【0009】
本発明の請求項6に係る基板移載装置は、請求項3〜5の何れか1項に記載において、前記第二移動部材によって前記基板の搬送経路から退避された前記基板搬送部材を、前記第一移動部材に引き渡す引渡装置が設けられることを特徴とする。
【発明の効果】
【0010】
本発明の請求項1の基板移載装置によれば、基板搬送部材を上昇させて、基板搬送部材に設けられた支持部で基板を支持させる上昇手段が設けられていない場合と比して、簡易な構成で、基板搬送部材に設けられた凸状の支持部に基板を支持させることができる(載せることができる)。また、全ての基板を基板搬送部材に載せて搬送する構成と比して、基板搬送部材を必要としない基板を搬送する場合には、基板を基板搬送部材に載せる工程を無くすことができる。
【0011】
本発明の請求項2の基板移載装置によれば、基板を第一受取部材が受け取った状態で、第一移動部材が幅方向に移動しない場合と比して、第一受取部材の幅方向の位置と第二搬送装置の幅方向の位置とが対応しない場合でも基板を基板搬送部材に載せる工程を無くすことができる。
【0012】
本発明の請求項3の基板移載装置によれば、第二受取部材が受け取った基板搬送部材を下降手段が下降させて第二受渡部材で基板を支持させる構成を有さない場合と比して、簡易な構成で、基板を基板搬送部材から分離(離間)させることができる(基板搬送部材を降ろすことができる)。
【0013】
本発明の請求項4の基板移載装置によれば、全ての基板を基板搬送部材に載せて搬送する構成と比して、基板搬送部材を必要としない基板を搬送する場合には、基板を基板搬送部材から分離(離間)する工程を無くすことができる。
【0014】
本発明の請求項5の基板移載装置によれば、基板を第二受渡部材が受け取った状態で、第二移動部材が幅方向に移動しない場合と比して、第二受取部材の幅方向の位置と第三搬送装置の幅方向の位置とが対応しない場合でも基板を基板搬送部材から分離(離間)する工程を無くすことができる。
【0015】
本発明の請求項6の基板移載装置によれば、第二移動部材によって基板の搬送経路から退避された基板搬送部材を、第一移動部材に引き渡す引渡装置が設けられていない場合と比して、基板搬送部材を再利用することができる(使い回すことができる)。
【図面の簡単な説明】
【0016】
【図1】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図2】本実施形態に係る基板移載装置を示した平面図である。
【図3】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図4】本実施形態に係る基板移載装置を示した平面図である。
【図5】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図6】本実施形態に係る基板移載装置を示した平面図である。
【図7】(A)(B)(C)本実施形態に係る基板移載装置を示した断面図である。
【図8】本実施形態に係る基板移載装置を示した平面図である。
【図9】本実施形態に係る基板移載装置が用いられる全体工程を示した工程図である。
【発明を実施するための形態】
【0017】
本発明の実施形態に係る基板移載装置の一例について図1〜図9に従って説明する。なお、図中に示す矢印UPは、鉛直方向上方を示す。
【0018】
(全体構成)
図9に示されるように、基板12(図1参照)に電子部品(例えば、チップ等)を実装(マウント)してハンダ付けする場合には、先ず、工程100では、基板12にクリームハンダがスクリーン印刷により塗布される。
【0019】
次に、工程200(チップマウント工程)では、クリームハンダが塗布された基板12に電子部品(チップ)が実装(マウント)される。より具体的には、電子部品実装装置を用いて、電子部品が、基板12のパッド上に塗布されたクリームハンダ上に電子部品の端子が位置するように基板12に置かれる。
【0020】
次に、工程300(ハンダ付け工程)では、電子部品が実装された基板12がリフロー炉14内に搬送され、リフロー炉14の熱により、クリームハンダが溶融して電子部品が基板12にハンダ付けされる。
【0021】
次に、工程400(検査工程)では、リフロー炉14内から搬送された基板12の外観(ハンダ付け状態等)を検査する。
【0022】
ここで、工程200と工程300との間には、基板12を上流工程の搬送装置から下流工程の搬送装置に載せ換える基板移載工程250が設けられ、工程300と工程400との間には、基板12を上流工程の搬送装置から下流工程の搬送装置に載せ換える基板移載工程350が設けられている。本実施形態に係る基板移載装置10は、主に、この基板移載工程250及び基板移載工程350で用いられる。
【0023】
(要部構成)
〔搬送パレット18を用いて基板12を搬送するように設定されている場合〕
先ず、工程300(図9参照)で基板12を搬送する際に、基板搬送部材の一例としての搬送パレット18(図1(B)参照)を用いて基板12を搬送するように設定されている場合について、基板移載工程250で用いられる構成(図9に示すA部の構成)について説明する。
【0024】
図2には、各工程における基板移載装置10の平面図が示され、図1には、各工程における基板移載装置10の断面図が示されている。
【0025】
図1(A)、図2に示されるように、基板12に電子部品(図示省略)が実装される工程200(図9参照)では、基板12の搬送方向(図中矢印K方向、以下単に「搬送方向」と言う)に基板12を搬送する第一搬送装置の一例としての一対のベルトコンベア16が設けられている。一対のベルトコンベア16は、ローラ等を用いて無端状のベルトが回転する一般的なものであり、基板12の幅方向両端側を支持しながら基板12を搬送方向下流側に搬送するようになっている。なお、以下の説明では、平面視で基板12の搬送方向に対して直交する方向を幅方向と称する。ここで、平面視とは、図9に示したように、基板移載装置10を真上から見下ろした場合のことを意味する。
【0026】
さらに、図1(B)、図2に示されるように、基板12を移載する工程250(図9参照)には、ベルトコンベア16により搬送される基板12の搬送経路の下に、基板12を下側から支持する搬送パレット18を移動させる第一移動部材22が設けられている。
【0027】
詳細には、第一移動部材22は、搬送パレット18等を内部に保持する本体部30と、本体部30を搬送方向に対して交差(直交)する方向に移動可能にするコロ32とを備えている。さらに、本体部30は、搬送方向から見て上方が開放されたコ字状とされ、側板30Aと底板30Bとで構成されている。
【0028】
また、第一移動部材22は、基板12を移載するための移載位置(図9に示す実線)と、基板12の搬送経路から退避する退避位置(図9に示す破線)との間を図示せぬ駆動部材(例えば、コロ32に駆動力を与える正逆転モータ等)から駆動力をうけて往復移動可能とされている。
【0029】
さらに、この第一移動部材22の内部には、ベルトコンベア16によって搬送された基板12を受け取る第一受取部材の一例としての一対のベルトコンベア26が設けられている。
【0030】
具体的には、一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)は、一対のベルトコンベア16の幅寸法(図1(A)に示す寸法D)と同等とされている。そして、第一移動部材22が移載位置(図9に示す実線)に移動した状態では、平面視で、ベルトコンベア16とベルトコンベア26とは直線状に配置されるようになっている。さらに、ベルトコンベア16とベルトコンベア26との鉛直方向の高さは同等とされている。そして、ベルトコンベア16の回転駆動と同期してベルトコンベア26が回転することで、ベルトコンベア16によって搬送された基板12をベルトコンベア26が受け取るようになっている。
【0031】
さらに、この第一移動部材22の内部には、前述した搬送パレット18が設けられ、この搬送パレット18は、搬送方向から見ると上方が開放されたコ字状とされ、搬送パレット18の底板18Aには、鉛直方向に延びる支持部20の基端部が固定されている。また、搬送パレット18の開放縁部には、幅方向外側に突出する鍔部18Bが設けられている。
【0032】
さらに、搬送パレット18の鍔部18Bが載せられると共に、回転駆動して搬送パレット18を後工程へ搬送する(受け渡す)第一受渡部材の一例としての一対のベルトコンベア28が搬送方向に延びて設けられている。具体的には、一対のベルトコンベア28の幅寸法(図1(B)に示す寸法E)は、一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)より大きくされている。そして、図2に示されるように、平面視で、ベルトコンベア28は、ベルトコンベア26と重ならないように配置されている。
【0033】
また、図1(B)に示されるように、搬送パレット18の底板18Aと第一移動部材22の底板30Bとの間には、搬送パレット18を上昇させて、搬送パレット18に設けられた支持部20の先端部で基板12を支持させる上昇手段の一例としてのリフター36が設けられている。より具体的には、リフター36の駆動源として油圧または空気圧シリンダを用いる場合は、一対のベルトコンベア28を支持する図示しない支持フレームの下面にシリンダロッドを固定し、底板30Bの上面にシリンダ本体を固定する。なお、本実施例では、リフター36は、搬送パレット18を上昇させるのに伴なってベルトコンベア28も同様に上昇させるようになっている。また、本実施形態では、リフター36を第一移動部材22の内部に設けたが、リフターを第一移動部材22の外部、例えば、床面等に固定してもよい。
【0034】
一方、図1(C)、図2に示されるように、リフロー炉14内には、搬送方向に延びる第二搬送装置の一例としての一対のベルトコンベア40が設けられている。
【0035】
一対のベルトコンベア40は、固定された一方のベルトコンベア40Aと、幅方向に移動可能とされた他方のベルトコンベア40Bとを備えている。そして、図2に示されるように、搬送パレット18を用いて基板12を搬送する場合には、平面視で、ベルトコンベア40とベルトコンベア28とは直線状に配置される。一方、図6に示されるように、搬送パレット18を用いずに基板12を搬送する場合には、他方のベルトコンベア40Bを移動させて、一対のベルトコンベア40の幅寸法は、一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされる。
【0036】
そして、図2に示されるように、搬送パレット18を用いて基板12を搬送する場合には、ベルトコンベア40の回転駆動と同期してベルトコンベア28が回転することで、ベルトコンベア28によって搬送された搬送パレット18をベルトコンベア40が受け取るようになっている。
【0037】
また、このように、ベルトコンベア40が搬送パレット18を搬送するように設定されている場合に、ベルトコンベア16から搬送された基板12をベルトコンベア26が受け取ってからリフター36により搬送パレット18を上昇させて支持部20で基板12を支持した状態で、ベルトコンベア28が搬送パレット18をベルトコンベア40に受け渡すように制御する第一制御部38が設けられている。
【0038】
具体的には、図1、図2に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア28の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第一制御部38は、第一移動部材22を制御して第一移動部材22を移載位置へ移動した後、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる。次に、第一制御部38は、リフター36を制御して搬送パレット18を上昇させて支持部20で基板12を支持させる。次に、第一制御部38は、ベルトコンベア28の回転駆動を制御して、搬送パレット18をベルトコンベア40に受け渡すようになっている。
【0039】
次に、図9に示されるように、搬送パレット18に支持されながらリフロー炉14内を搬送された基板12を移載する基板移載工程350で用いられる構成(図9に示すB部の構成)について説明する。
【0040】
さらに、図3(B)、図4に示されるように、基板12を移載する工程350(図9参照)には、ベルトコンベア40(図3(A)参照)により搬送される搬送パレット18の搬送経路に、搬送パレット18を受け取る第二受取部材の一例としての一対のベルトコンベア42を備えた第二移動部材44が配置されている。
【0041】
詳細には、第二移動部材44は、ベルトコンベア42等を内部に上下動可能に保持する本体部46と、本体部46を搬送方向に対して交差(直交)する方向に移動可能するコロ48とを備えている。さらに、本体部46は、搬送方向から見て上方が開放されたコ字状とされ、側板46Aと底板46Bとで構成されている。
【0042】
また、第二移動部材44は、基板12を移載するための移載位置(図9に示す実線)と、基板12の搬送経路から退避する退避位置(図9に示す破線)との間を図示せぬ駆動部材(例えば、コロ48に駆動力を与える正逆転モータ等)から駆動力をうけて往復移動可能とされている。
【0043】
詳細には、前述したベルトコンベア42は、第二移動部材44の内部に設けられ、一対のベルトコンベア42の幅寸法(図3(B)に示す寸法F)は、一対のベルトコンベア40の幅寸法と同等とされている。そして、第二移動部材44が移載位置(図9に示す実線)に移動した状態では、平面視で、ベルトコンベア40とベルトコンベア42とは直線状に配置されるようになっている。
【0044】
さらに、ベルトコンベア42とベルトコンベア40との鉛直方向の高さは同等とされている。そして、ベルトコンベア40の回転駆動と同期してベルトコンベア42が回転することで、ベルトコンベア40によって搬送された搬送パレット18をベルトコンベア42が受け取るようになっている。
【0045】
また、図3(B)に示されるように、ベルトコンベア42が受け取った搬送パレット18の底板18Aと第二移動部材44の底板46Bとの間には、搬送パレット18を下降させる下降手段の一例としてのリフター50が設けられている。より具体的には、リフター50の駆動源として油圧または空気圧シリンダを用いる場合は、一対のベルトコンベア42を支持する図示しない支持フレームの下面にシリンダロッドを固定し、底板46Bの上面にシリンダ本体を固定する。なお、本実施例では、リフター50は、搬送パレット18を下降させるのに伴なってベルトコンベア42も同様に下降させるようになっている。また、本実施形態では、リフター50を第二移動部材44の内部に設けたが、リフターを第二移動部材44の外部、例えば、床面等に固定してもよい。
【0046】
さらに、第二移動部材44の内部には、リフター50によって下降する搬送パレット18に支持されていた基板12を受け取って、搬送パレット18の支持部20と基板12とを分離(離間)させる第二受取部材の一例としての一対のベルトコンベア52が設けられている。そして、図3(C)、図4に示されるように、ベルトコンベア52は、基板12を工程400に設けられた第三搬送手段の一例としての一対のベルトコンベア54に受け渡すようになっている。
【0047】
詳細には、一対のベルトコンベア52の幅寸法(図3(B)に示す寸法G)と一対のベルトコンベア54の幅寸法(図3(C)に示す寸法H)は、一対のベルトコンベア16の幅寸法(図1(A)に示す寸法D)及び一対のベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされている。そして、第二移動部材44が移載位置(図9に示す実線)に移動した状態では、平面視で、ベルトコンベア52とベルトコンベア54とは直線状に配置されるようになっている。
【0048】
さらに、ベルトコンベア52とベルトコンベア54との鉛直方向の高さは同等とされている。そして、ベルトコンベア54の回転駆動と同期してベルトコンベア52が回転することで、ベルトコンベア52が基板12をベルトコンベア54に受け渡すようになっている。
【0049】
また、このように、ベルトコンベア40が搬送パレット18を搬送するように設定されている場合に、ベルトコンベア40から搬送された搬送パレット18をベルトコンベア42が受け取ってからリフター50により搬送パレット18を下降させて搬送パレット18が基板12から離間してベルトコンベア52が基板12を支持した状態で、ベルトコンベア52が基板12をベルトコンベア54に受け渡すように制御する第二制御部56が設けられている。
【0050】
具体的には、図3、図4に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア28の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第二制御部56は、第二移動部材44を制御して第二移動部材44を移載位置へ移動した後、ベルトコンベア42の回転駆動を制御して、ベルトコンベア40によって搬送された搬送パレット18をベルトコンベア42に受け取らせる。次に、第二制御部56は、リフター50を制御して搬送パレット18を下降させてベルトコンベア52で基板12を支持させる。次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡す。
【0051】
一方、図9に示されるように、基板移載装置10には、退避位置に配置される第二移動部材44(図9破線参照)に支持された搬送パレット18を退避位置に配置される第一移動部材22(図9破線参照)に引き渡す引渡装置58が設けられている。
【0052】
〔搬送パレット18を用いず基板12を搬送するように設定されている場合〕
次に、工程300で基板を搬送する際に、搬送パレット18(図1(B)参照)を用いず基板12を搬送するように設定されている場合について、基板移載工程250で用いられる構成(図9に示すA部の構成)について図5〜図8を用いて説明する。尚、図6の中央には第一移動部材22が左右2つ並んで図示されているが、説明を分かりやすくするために第一移動部材22の2つの状態を対比し易くしたものである。このため、実際には、第一移動部材は、図6の中央に図示されたように並んで存在しているのではなく、移載位置において左右2つの内いずれか一方の状態にある。図8も同様である。すなわち、図8の中央には第二移動部材44が左右2つ並んで図示されているが、説明を分かりやすくするために第二移動部材44の2つの状態を対比し易くしたものである。このため、実際には、第二移動部材は、図8の中央に図示されたように並んで存在しているのではなく、移載位置において左右2つの内いずれか一方の状態にある。 図5(A)(B)(C)、図6に示されるように、第一制御部38は、ベルトコンベア16から搬送された基板12をベルトコンベア26が受け取ってから、第一移動部材22を幅方向に移動させる。ベルトコンベア26の幅方向の位置とベルトコンベア40の幅方向の位置とが対応してから、ベルトコンベア26が受け取った基板12をベルトコンベア40に受け渡すように制御するようになっている。
【0053】
具体的には、図5、図6に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされている場合には、第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように第一移動部材22を移動させる。次に、第一制御部材38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる(図5(B)の上の図、第一移動部材22が図6の中央左側の図の場合)。次に、第一制御部38は、平面視でベルトコンベア26とベルトコンベア40とが直線状に配置されるように第一移動部材22を移動させる(図5(B)の下の図、第一移動部材22が図6の中央右側の図の場合)。次に、第一制御部38は、ベルトコンベア26の回転駆動を制御して、基板12をベルトコンベア40に受け渡すようになっている(図5(C)、第一移動部材22が図6の中央右側の図の場合)。
【0054】
次に、図9に示されるように、搬送パレット18に支持されながらリフロー炉14内を搬送された基板12を移載する基板移載工程350で用いられる構成(図9に示すB部の構成)について説明する。
【0055】
図7(A)(B)(C)、図8に示されるように、第二制御部56は、ベルトコンベア40から搬送された基板12をベルトコンベア52が受け取ってから、第一移動部材22を幅方向に移動させる。そして、ベルトコンベア52の幅方向の位置とベルトコンベア54の幅方向の位置とが対応してから、ベルトコンベア52が受け取った基板12をベルトコンベア54に受け渡すように制御するようになっている。
【0056】
具体的には、図7(A)、図8に示されるように、ベルトコンベア40の幅寸法が、ベルトコンベア26の幅寸法(図1(B)に示す寸法C)と同等とされている場合には、第二制御部56は、平面視でベルトコンベア40とベルトコンベア52とが直線状に配置されるように第二移動部材44を移動させる。次に、第二制御部材56は、ベルトコンベア52の回転駆動を制御して、ベルトコンベア40によって搬送された基板12をベルトコンベア52に受け取らせる(図7(B)の上の図、第二移動部材44が図8の中央左側の図の場合)。次に、第二制御部56は、平面視でベルトコンベア52とベルトコンベア54とが直線状に配置されるように第二移動部材44を移動させる(図7(B)の下の図、第二移動部材44が図8の中央右側の図の場合)。次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡すようになっている(図7(C)、第二移動部材44が図8の中央右側の図の場合)。
【0057】
なお、第一制御部38及び第二制御部56以外の制御については、搬送パレット18の使用の要否に関わらず共通の制御であり、図示せぬ共通の制御部が制御するものである。
(要部構成の作用)
次に、基板移載装置10の作用について説明する。
【0058】
〔搬送パレット18を用いて基板12を搬送するように設定されている場合〕
図1(A)(B)、図2に示されるように、工程200(図9参照)で電子部品が実装されてベルトコンベア16により搬送される基板12の搬送経路に、第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように、第一移動部材22を移動する。つまり、第一制御部38は、第一移動部材22を移載位置に移動する。
【0059】
さらに、ベルトコンベア40の幅寸法が、ベルトコンベア28の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第一制御部38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる(図1(B)上の図)。
【0060】
また、第一制御部38は、リフター36を制御して搬送パレット18を上昇させて支持部20で基板12を支持させる。これにより、ベルトコンベア26と基板12とは分離(離間)する(図1(B)下の図)。
【0061】
さらに、第一制御部38は、ベルトコンベア28の回転駆動を制御して、搬送パレット18をリフロー炉14に設けられたベルトコンベア40に受け渡す(図1(C))。
【0062】
搬送パレット18をベルトコンベア40に受け渡すと、第一移動部材22は、第一制御部38によって制御されて、移載位置(図9の実線参照)から退避位置(図9の破線参照)へ移動する。
【0063】
図1(C)、図2に示されるように、リフロー炉14内をベルトコンベア40で搬送されることで、搬送パレット18の支持部20に支持された基板12に実装された電子部品が基板12にハンダ付けされる。
【0064】
図3(A)(B)、図4に示されるように、第二制御部56は、平面視でベルトコンベア40とベルトコンベア42とが直線状に配置されるように、第二移動部材44を移動する。つまり、第二制御部56は、第二移動部材44を移載位置に移動する(図4)。
【0065】
さらに、第二制御部56は、移載位置に移動した第二移動部材44に備えられたベルトコンベア42の回転駆動を制御して、ベルトコンベア40によって搬送された搬送パレット18をベルトコンベア42に受け取らせる(図3(B)上の図)。
【0066】
さらに、第二制御部56は、リフター50を制御して搬送パレット18を下降させてベルトコンベア52で基板12を支持させる。これにより、搬送パレット18と基板12とは分離(離間)する(図3(B)下の図)。
【0067】
また、図3(B)(C)、図4に示されるように、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡す。
【0068】
基板12をベルトコンベア54に受け渡すと、搬送パレット18を支持する第二移動部材44は、移載位置(図9の実線参照)から退避位置(図9の破線参照)へ移動する。
【0069】
図9に示されるように、引渡装置58は、退避位置に配置される第二移動部材44(図9破線参照)に支持された搬送パレット18を退避位置に配置される第一移動部材22(図9破線参照)に引き渡す。
【0070】
〔搬送パレット18を用いず基板12を搬送するように設定されている場合〕
図5(A)(B)、図6に示されるように、工程200(図9参照)で電子部品が実装されてベルトコンベア16により搬送される基板12の搬送経路に、第一制御部38は、平面視でベルトコンベア16とベルトコンベア26とが直線状に配置されるように、第一移動部材22を移動する。つまり、第一制御部38は、第一移動部材22を移載位置に移動する(第一移動部材22が図6の中央左側の図の場合)。なお、搬送パレット18を用いないため、第一移動部材22の内部には搬送パレット18が設けられていない。
【0071】
さらに、ベルトコンベア40の幅寸法が、ベルトコンベア16の幅寸法(図1(B)に示す寸法E)と同等とされている場合には、第一制御部38は、ベルトコンベア26の回転駆動を制御して、ベルトコンベア16によって搬送された基板12をベルトコンベア26に受け取らせる(第一移動部材22が図6の中央左側の図の場合)。
【0072】
次に、第一制御部38は、平面視でベルトコンベア26とベルトコンベア40とが直線状に配置されるように第一移動部材22を移動する(第一移動部材22が図6の中央右側の図の場合)。
【0073】
次に、第一制御部38は、ベルトコンベア26の回転駆動を制御して、基板12をベルトコンベア40に受け渡す(第一移動部材22が図6の中央右側の図の場合)。
【0074】
図5(C)、図6に示されるように、リフロー炉14内をベルトコンベア40で搬送されることで、基板12に実装された電子部品が基板12にハンダ付けされる。
【0075】
図7(A)(B)、図8に示されるように、第二制御部56は、平面視でベルトコンベア40とベルトコンベア52とが直線状に配置されるように第二移動部材44を移動させる(第一移動部材44が図8の中央左側の図の場合)。
【0076】
次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、ベルトコンベア40によって搬送された基板12をベルトコンベア52に受け取らせる(第一移動部材44が図8の中央左側の図の場合)。
【0077】
次に、第二制御部56は、平面視でベルトコンベア52とベルトコンベア54とが直線状に配置されるように第一移動部材22を移動させる(第一移動部材44が図8の中央右側の図の場合)。
【0078】
次に、第二制御部56は、ベルトコンベア52の回転駆動を制御して、基板12をベルトコンベア54に受け渡す(第一移動部材44が図8の中央右側の図の場合)。
【0079】
以上説明したように、リフター36が搬送パレット18を上昇させるという簡易な構成で、搬送パレット18に設けられた支持部20に基板12が支持される(載せられる)。
【0080】
また、リフター50が搬送パレット18を下降させることで、簡易な構成で、基板12が搬送パレット18から離間する(基板12の搬送パレット18による支持が解除される)。
【0081】
また、搬送パレット18を用いない設定の場合には、搬送パレット18を用いることなく、基板12がリフロー炉14内を搬送されるため、基板12を搬送パレット18に乗降させる工程が無くなる。つまり、厚さが厚い基板は、薄い基板に比べて、剛性が高いため、リフロー炉の熱による基板の反りが小さいので、厚さが厚い基板を搬送する場合には、搬送パレットを用いる必要が無い。このように、厚い基板の場合には、基板を搬送パレット18に乗降させる工程が無くなる。
【0082】
また、基板12を受け取った後、第一移動部材22及び第二移動部材44を移動させることで、一方のベルトコンベア40Aを固定し、他方のベルトコンベア40Bを幅方向に移動させて一対のベルトコンベア40の幅寸法を一対のベルトコンベア16の幅寸法と同等にした場合でも、基板12を搬送パレット18に乗降させる工程が無くなる。
【0083】
また、引渡装置58が、第二移動部材44によって基板12の搬送経路から退避された搬送パレット18を退避位置に移動した第二移動部材44から受取り、退避位置に移動した第一移動部材22に引き渡す。このため、搬送パレット18が再利用される(使い回される)。引渡装置58は、例えば、ローラ等を用いて無端状のベルトが回転する一般的な一対のベルトコンベアを採用することができる。この場合、ベルトコンベアの幅および高さは、搬送パレット18を搬送できる幅および高さにする。そして、搬送パレット18を待避位置の第二移動部材44から引渡装置58に移載する場合は、ベルトコンベア42および引渡装置58のベルトコンベアを動作させる。また、搬送パレット18を引渡装置58から待避位置の第一移動部材22に移載する場合は、ベルトコンベア28および引渡装置58のベルトコンベアを動作させる。
【0084】
なお、本発明を特定の実施形態について詳細に説明したが、本発明はかかる実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかである。
【0085】
例えば、上記実施形態では、一方のベルトコンベア40Aを固定し、他方のベルトコンベア40Bを幅方向に移動させて一対のベルトコンベア40の幅寸法を一対のベルトコンベア16、54の幅寸法と同等したが、両方のベルトコンベアを移動させて一対のベルトコンベア40の幅寸法を一対のベルトコンベア16、54の幅寸法と同等し、さらに、一対のベルトコンベア40の幅方向の位置と一対のベルトコンベア16、54の幅方向の位置とを対応させてもてもよい。この場合には、基板12を受け取った後、第一移動部材22及び第二移動部材44の移動が無くなる。
【0086】
また、上記実施形態では、図5および図7の状態において、搬送パレット18が無い状態を示したが、搬送パレット18は使わないので、搬送パレット18があっても良い。
【符号の説明】
【0087】
10 基板移載装置
12 基板
16 ベルトコンベア(第一搬送装置の一例)
18 搬送パレット(基板搬送部材の一例)
20 支持部
22 第一移動部材
26 ベルトコンベア(第一受取部材の一例)
28 ベルトコンベア(第一受渡部材の一例)
36 リフター(上昇手段の一例)
38 第一制御部
40 ベルトコンベア(第二搬送装置の一例)
40A ベルトコンベア(第二搬送装置の一例)
40B ベルトコンベア(第二搬送装置の一例)
42 ベルトコンベア(第二受取部材の一例)
44 第二移動部材
50 リフター(下降手段)
52 ベルトコンベア(第二受渡部材の一例)
54 ベルトコンベア(第三搬送装置の一例)
56 第二制御部
58 引渡装置
【特許請求の範囲】
【請求項1】
基板の搬送方向上流側の第一搬送装置から搬送される前記基板の搬送経路の下に、前記基板を下側から支持する支持部を備えた基板搬送部材を移動させる第一移動部材と、
前記第一移動部材に設けられ、前記第一搬送装置から搬送された前記基板を受け取る第一受取部材と、
前記第一移動部材によって前記基板の搬送経路の下に移動した前記基板搬送部材を上昇させて、前記基板搬送部材に設けられた前記支持部で前記第一受取部材が受け取った前記基板を支持させる上昇手段と、
前記第一移動部材に設けられ、前記上昇手段によって上昇した前記基板搬送部材を基板の搬送方向下流側の第二搬送装置に受け渡す第一受渡部材と、
下記(1)または(2)のように制御する第一制御部と、
を備える基板搬送装置。
(1)前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから前記上昇手段により前記基板搬送部材を上昇させて前記支持部が前記基板を支持した状態で、前記第一受渡部材が前記基板搬送部材を前記第二搬送装置に受け渡す
(2)前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取り、前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡す
【請求項2】
前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とが対応しない場合には、
前記第一制御部は、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから、前記第一移動部材を幅方向に移動させて前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とを対応させてから前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡すように制御する請求項1に記載の基板移載装置。
【請求項3】
前記基板を支持しながら前記第二搬送装置から搬送された前記基板搬送部材を受け取る第二受取部材と、
前記第二受取部材が受け取った前記基板搬送部材を下降させる下降手段と、
前記下降手段によって下降する前記基板搬送部材に支持された前記基板を支持して前記基板搬送部材と前記基板とを離間させると共に、離間した前記基板を前記基板の搬送方向下流側の第三搬送装置に受け渡す第二受渡部材と、
前記第二受取部材と前記第二受渡部材とを備えると共に、前記基板から離間した前記基板搬送部材を前記基板の搬送経路から退避させる第二移動部材と、
前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第二搬送装置から搬送された前記基板搬送部材を前記第二受取部材が受け取ってから前記下降手段により前記基板搬送部材を下降させて前記基板搬送部材が前記基板から離間した状態で、前記第二受渡部材が前記基板を前記第三搬送装置に受け渡すように制御する第二制御部と、
を備える請求項1又は2に記載の基板移載装置。
【請求項4】
前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、
前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取り、前記第二受渡部材が受け取った基板を前記第三搬送装置に受け渡すように制御する請求項3に記載の基板移載装置。
【請求項5】
前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第二受取部材の幅方向の位置と前記第三搬送装置の幅方向の位置とが対応しない場合には、
前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取ってから、前記第二移動部材を幅方向に移動させて前記第三搬送装置の幅方向の位置と前記第二受渡部材の幅方向の位置とを対応させてから前記第二受渡部材が受け取った前記基板を前記第三搬送装置に受け渡すように制御する請求項3又は4に記載の基板移載装置。
【請求項6】
前記第二移動部材によって前記基板の搬送経路から退避された前記基板搬送部材を、前記第一移動部材に引き渡す引渡装置が設けられる請求項3〜5に記載の基板移載装置。
【請求項1】
基板の搬送方向上流側の第一搬送装置から搬送される前記基板の搬送経路の下に、前記基板を下側から支持する支持部を備えた基板搬送部材を移動させる第一移動部材と、
前記第一移動部材に設けられ、前記第一搬送装置から搬送された前記基板を受け取る第一受取部材と、
前記第一移動部材によって前記基板の搬送経路の下に移動した前記基板搬送部材を上昇させて、前記基板搬送部材に設けられた前記支持部で前記第一受取部材が受け取った前記基板を支持させる上昇手段と、
前記第一移動部材に設けられ、前記上昇手段によって上昇した前記基板搬送部材を基板の搬送方向下流側の第二搬送装置に受け渡す第一受渡部材と、
下記(1)または(2)のように制御する第一制御部と、
を備える基板搬送装置。
(1)前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから前記上昇手段により前記基板搬送部材を上昇させて前記支持部が前記基板を支持した状態で、前記第一受渡部材が前記基板搬送部材を前記第二搬送装置に受け渡す
(2)前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取り、前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡す
【請求項2】
前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とが対応しない場合には、
前記第一制御部は、前記第一搬送装置から搬送された前記基板を前記第一受取部材が受け取ってから、前記第一移動部材を幅方向に移動させて前記第一受取部材の幅方向の位置と前記第二搬送装置の幅方向の位置とを対応させてから前記第一受取部材が受け取った前記基板を前記第二搬送装置に受け渡すように制御する請求項1に記載の基板移載装置。
【請求項3】
前記基板を支持しながら前記第二搬送装置から搬送された前記基板搬送部材を受け取る第二受取部材と、
前記第二受取部材が受け取った前記基板搬送部材を下降させる下降手段と、
前記下降手段によって下降する前記基板搬送部材に支持された前記基板を支持して前記基板搬送部材と前記基板とを離間させると共に、離間した前記基板を前記基板の搬送方向下流側の第三搬送装置に受け渡す第二受渡部材と、
前記第二受取部材と前記第二受渡部材とを備えると共に、前記基板から離間した前記基板搬送部材を前記基板の搬送経路から退避させる第二移動部材と、
前記第二搬送装置が前記基板搬送部材を搬送するように設定されている場合には、前記第二搬送装置から搬送された前記基板搬送部材を前記第二受取部材が受け取ってから前記下降手段により前記基板搬送部材を下降させて前記基板搬送部材が前記基板から離間した状態で、前記第二受渡部材が前記基板を前記第三搬送装置に受け渡すように制御する第二制御部と、
を備える請求項1又は2に記載の基板移載装置。
【請求項4】
前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定されている場合には、
前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取り、前記第二受渡部材が受け取った基板を前記第三搬送装置に受け渡すように制御する請求項3に記載の基板移載装置。
【請求項5】
前記第二搬送装置が前記基板搬送部材を用いずに前記基板を搬送するように設定され、前記第二受取部材の幅方向の位置と前記第三搬送装置の幅方向の位置とが対応しない場合には、
前記第二制御部は、前記第二搬送装置から搬送された前記基板を前記第二受渡部材が受け取ってから、前記第二移動部材を幅方向に移動させて前記第三搬送装置の幅方向の位置と前記第二受渡部材の幅方向の位置とを対応させてから前記第二受渡部材が受け取った前記基板を前記第三搬送装置に受け渡すように制御する請求項3又は4に記載の基板移載装置。
【請求項6】
前記第二移動部材によって前記基板の搬送経路から退避された前記基板搬送部材を、前記第一移動部材に引き渡す引渡装置が設けられる請求項3〜5に記載の基板移載装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−182300(P2012−182300A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−44016(P2011−44016)
【出願日】平成23年3月1日(2011.3.1)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年3月1日(2011.3.1)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
[ Back to top ]