
基板移載装置
【課題】より確実にトレイからリフトアームを用いてガラス基板を離脱させることができる簡素な構成の基板移載装置を提供する。
【解決手段】基板移載装置1Aは、トレイ100上に載置されたガラス基板200をトレイ100から離脱させることによってガラス基板200を移載するものであって、トレイ100の周縁部を開放させた状態でトレイ100を支持する支持部20と、トレイ100の周縁部を下方に向けて撓み変形させることにより、トレイ100の周縁部とガラス基板200の周縁部との間に隙間を生じさせる押圧ピン14と、トレイ100の周縁部とガラス基板200の周縁部との間に生じた隙間に側方から挿入されることにより、ガラス基板200の周縁部を下方から支持してガラス基板200をトレイ100から離脱させるリフトアーム13とを備える。
【解決手段】基板移載装置1Aは、トレイ100上に載置されたガラス基板200をトレイ100から離脱させることによってガラス基板200を移載するものであって、トレイ100の周縁部を開放させた状態でトレイ100を支持する支持部20と、トレイ100の周縁部を下方に向けて撓み変形させることにより、トレイ100の周縁部とガラス基板200の周縁部との間に隙間を生じさせる押圧ピン14と、トレイ100の周縁部とガラス基板200の周縁部との間に生じた隙間に側方から挿入されることにより、ガラス基板200の周縁部を下方から支持してガラス基板200をトレイ100から離脱させるリフトアーム13とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板を移載するための基板移載装置に関し、より特定的には、トレイ上に載置された基板をリフトアームを用いてトレイから離脱させて基板を移載する基板移載装置に関する。
【背景技術】
【0002】
太陽電池や液晶パネル、半導体装置等の製造工程においては、ワークである基板(ガラス基板や半導体基板等)を各種製造装置間や各種製造装置と基板カセット間等において頻繁に移載させることが必要になる。ここで、ワークである基板は、それ単体で移載される場合に限られず、当該基板が載置されたトレイごと移載される場合や、当該基板が載置されたトレイから基板のみが離脱されて移載される場合等がある。
【0003】
たとえば、特開2010−232465号公報(特許文献1)や特開2011−73875号公報(特許文献2)には、CVD(Chemical Vapor Deposition)装置のロードロック室に収容された、基板が載置されたトレイを、ロボットハンドを用いて基板カセットに移載する基板移載装置が開示されている。当該特許文献1および2においては、基板がトレイごと基板カセットに収納される場合を例示しているが、トレイから基板が離脱させられることにより、基板のみが基板カセットに収納される場合もある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−232465号公報
【特許文献2】特開2011−73875号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、基板の移載に使用される基板移載装置としては、各種のものが知られている。その一つにリフトアームを用いて基板を移載する基板移載装置がある。当該リフトアームを利用した基板移載装置は、他の種類の基板移載装置に比較して簡素な構成で実現できるため、設置コストが大幅に削減できるメリットがある。
【0006】
しかしながら、トレイ上に載置された基板をリフトアームを用いてトレイからリフトさせるためには、基板の下面をリフトアームによって支持することが必要になるが、通常、基板の下面はトレイの上面に接触しているため、これを実現することは必ずしも容易ではない問題があった。
【0007】
また、製造過程において熱処理等が実施された後の基板およびトレイには、不定形状の反りが生じている場合が多く、そのため反りの生じ方如何によっては基板をリフトすることすらままならない状況も考えられ、製造ラインの突発的な停止が頻繁に起こってしまうといった問題や基板に破損が生じてしまうといった問題等が生じる懸念があった。
【0008】
したがって、本発明は、上述した問題点を解決すべくなされたものであり、より確実にトレイからリフトアームを用いて基板を離脱させることができる簡素な構成の基板移載装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に基づく基板移載装置は、トレイ上に載置された基板を上記トレイから離脱させることによって上記基板を移載するものであって、上記トレイの周縁部の少なくとも一部を開放させた状態で上記トレイを支持する支持部と、上記トレイの開放された部分を下方に向けて撓み変形させることにより、上記トレイの周縁部と上記基板の周縁部との間に隙間を生じさせる隙間形成手段と、上記トレイの周縁部と上記基板の周縁部との間に生じた隙間に側方から挿入されることにより、上記基板の周縁部を下方から支持して上記基板を上記トレイから離脱させるリフトアームとを備えている。
【0010】
上記本発明に基づく基板移載装置にあっては、上記隙間形成手段および上記リフトアームの各々が、上記支持部を挟み込むように少なくとも一対以上設けられていることが好ましい。
【0011】
上記本発明に基づく基板移載装置にあっては、上記隙間形成手段が、上記トレイの開放された部分を上方から押圧する押圧部にて構成されていることが好ましい。
【0012】
上記本発明に基づく基板移載装置は、上記リフトアームおよび上記リフトアームを水平方向に沿って移動させる移動機構を含むリフト部と、上記リフト部を鉛直方向に沿って昇降させる昇降機構とをさらに備えていてもよい。その場合には、上記押圧部が、上記リフト部に一体的に設けられていることが好ましい。
【0013】
上記本発明に基づく基板移載装置にあっては、上記トレイを上方から押圧する部位である上記押圧部の先端面が、上記基板の周縁部を下方から支持する部位である上記リフトアームの支持面よりも下方に位置していることが好ましい。
【0014】
上記本発明に基づく基板移載装置にあっては、上記基板の周縁部を下方から支持する部位である上記リフトアームの支持面が、先端側に向かうに連れて徐々に低くなる傾斜面にて構成されていることが好ましい。
【0015】
上記本発明に基づく基板移載装置にあっては、上記支持部が、上記トレイを保持するための吸着パッドを具備してなるロボットハンドにて構成されていてもよい。
【発明の効果】
【0016】
本発明によれば、より確実にトレイからリフトアームを用いて基板を離脱させることができる簡素な構成の基板移載装置とすることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態1における基板移載装置の平面図および正面図である。
【図2】図1に示す基板移載装置において、リフト部を下降させた状態を示す平面図および正面図である。
【図3】図2に示す領域IIIの拡大図である。
【図4】図1に示す基板移載装置において、リフトアームの支持爪部をガラス基板の周縁部の下方に挿入させた状態を示す平面図および正面図である。
【図5】図4に示す領域Vの拡大図である。
【図6】図1に示す基板移載装置において、リフトアームを用いてガラス基板を持ち上げた後の状態を示す正面図である。
【図7】本発明の実施の形態2における基板移載装置の平面図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態について、図を参照して詳細に説明する。なお、以下に示す実施の形態1および2は、たとえばCVD装置のロードロック室に収容された、ガラス基板が載置されたアルミ製の薄板からなるトレイを、ロボットハンドを用いて当該ロードロック室から取り出した後に、トレイ上に載置されているガラス基板のみをリフトアームを用いてトレイから離脱させて基板カセットに移載する基板移載装置に本発明を適用した場合を例示するものである。
【0019】
(実施の形態1)
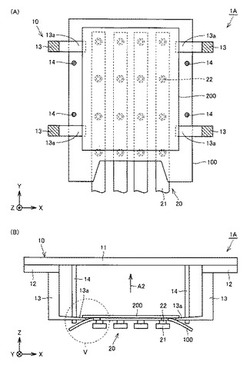
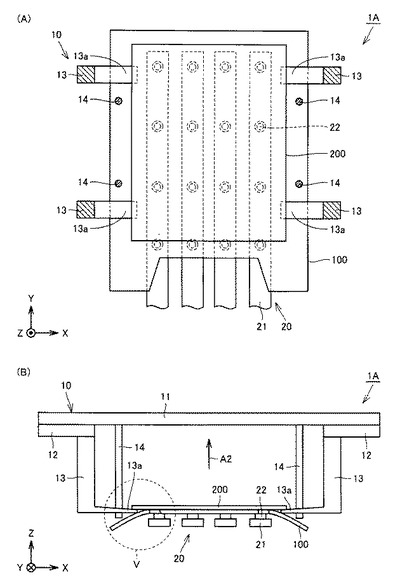
図1は、本発明の実施の形態1における基板移載装置の構成を示す図であり、(A)は平面図、(B)は正面図である。まず、この図1を参照して、本実施の形態における基板移載装置1Aの構成について説明する。
【0020】
図1に示すように、基板移載装置1Aは、ガラス基板200を持ち上げるためのユニットであるリフト部10と、ガラス基板200が載置されたトレイ100を支持するためのユニットである支持部20とを主として備えている。
【0021】
リフト部10は、ベースとなる機枠11と、当該機枠11に設けられた移動機構12と、当該移動機構12を介して機枠11に取付けられたリフトアーム13と、機枠11に移動機構12を介することなく直接取付けられた隙間形成手段である押圧部としての押圧ピン14とを有している。なお、リフト部10は、図示しない昇降機構によって駆動されることにより、図中に示すZ軸方向(すなわち鉛直方向)に沿って昇降可能となるように構成されている。
【0022】
ここで、基板移載装置1Aにあっては、平面視矩形状のガラス基板200を安定的に支持して移載するために、ガラス基板200の一対の長辺に対応する部分にそれぞれ2つずつリフトアーム13が設けられている。これにより、リフト部10は、合計で4つのリフトアーム13を有することになる。より詳細には、ガラス基板200が載置されたトレイ100を支持する支持部20を挟み込むように、図中に示すX軸方向に沿って対向して一対のリフトアーム13,13が配置されるとともに、当該一対のリフトアーム13,13が図中に示すY軸方向に沿って2組設けられている。
【0023】
移動機構12は、リフトアーム13を図中に示すX軸方向(すなわち水平方向)に沿って移動させるためのものであり、リフトアーム13を案内するガイド機構やリフトアームを駆動する駆動機構等を含んでいる。移動機構12は、上述した合計4つのリフトアーム13のそれぞれに対応して設けられており、個別にこれらリフトアーム13を駆動する。なお、これに代えて、ガラス基板200の一方の長辺に対応して配置された2つのリフトアーム13,13を単一の移動機構12を用いて同時に駆動することとしてもよい。
【0024】
リフトアーム13は、正面視略L字状の形状を有しており、その下端に支持爪部13aを有している。支持爪部13aは、いずれも支持部20側に向かって突出するように形成されており、当該支持爪部13aの先端部近傍の上面が、ガラス基板200を支持するための支持面として機能する。
【0025】
また、基板移載装置1Aにあっては、平面視略矩形状のトレイ100の周縁部を安定的に押圧可能にするために、トレイ100の一対の長辺に対応する部分にそれぞれ2つずつ押圧ピン14が設けられている。これにより、リフト部10は、合計で4つの押圧ピン14を有することになる。より詳細には、ガラス基板200が載置されたトレイ100を支持する支持部20を挟み込むように、図中に示すX軸方向に沿って対向して一対の押圧ピン14,14が配置されるとともに、当該一対の押圧ピン14,14が図中に示すY軸方向に沿って2組設けられている。
【0026】
押圧ピン14は、棒状の形状を有しており、その上端部が機枠11に固定されている。押圧ピン14は、下方に向かって延びるように形成されており、その下端に位置する先端面が、トレイ100を押圧するための部位として機能する。
【0027】
なお、合計4つの押圧ピン14のそれぞれは、上述した合計4つのリフトアーム13のそれぞれに対応付けて設けられており、個々の押圧ピン14は、リフトアーム13の配設位置の近傍に設けられている。
【0028】
一方、支持部20は、ベースとなるロボットハンド21と、当該ロボットハンド21上に設けられた吸着パッド22とを有している。より詳細には、ロボットハンド21は、互いに並行に延びる複数のアームを有しており、当該アームのそれぞれに複数の吸着パッド22が設けられている。なお、支持部20は、図示しない移動機構や昇降機構、旋回機構等によって駆動されることにより、水平面内における任意の方向や鉛直方向等に沿って自在に移動可能となるように構成されている。
【0029】
支持部20は、図示しないCVD装置のロードロック室において、当該ロードロック室に収容された、ガラス基板200が載置されたトレイ100の下方に挿入され、上述した吸着パッド22を用いてトレイ100の下面を吸着保持することにより、ガラス基板200ごとトレイ100を支持する。その後、支持部20は、上述した移動機構や昇降機構、旋回機構等によって駆動されることにより、ガラス基板200が載置されたトレイ100を支持した状態のままロードロック室から引き抜かれ、その後、上述したリフト部10の下方に移動されることになる。
【0030】
ここで、図示するように、支持部20は、トレイ100の周縁部を開放させた状態でトレイ100を支持する。これにより、トレイ100の周縁部の上面および下面は、いずれもロボットハンド21等によって遮られることなく露出した状態とされてリフト部10の下方に配置されることになる。
【0031】
本実施の形態における基板移載装置1Aは、後述するリフト動作を行なうことにより、支持部20によって支持されたトレイ100からリフト部10を用いてガラス基板200のみを離脱させることによってガラス基板200を持ち上げ、その後、当該リフト部10を用いてガラス基板200を図示しない基板カセットに収納するものである。
【0032】
ここで、基板移載装置1Aは、上述した隙間形成手段としての押圧ピン14を用いてトレイ100の周縁部を下方に向けて撓み変形させることにより、トレイ100とガラス基板200との間に隙間を生じさせるとともに、当該隙間に上述したリフトアーム13の支持爪部13aを挿入することにより、当該リフトアーム13にてガラス基板200の周縁部を下方から支持することでトレイ100からガラス基板200のみを離脱させて持ち上げることを可能にするものである。以下においては、その詳細について説明する。
【0033】
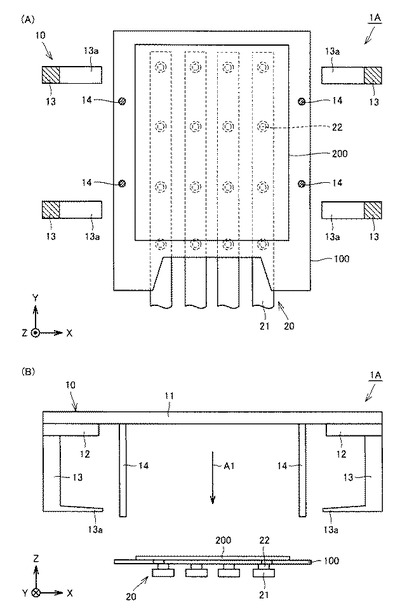
図2は、図1に示す基板移載装置において、リフト部を下降させた状態を示す平面図および正面図であり、図3は、図2に示す領域IIIの拡大図である。図4は、図1に示す基板移載装置において、リフトアームの支持爪部をガラス基板の周縁部の下方に挿入させた状態を示す平面図および正面図であり、図5は、図4に示す領域Vの拡大図である。また、図6は、図1に示す基板移載装置において、リフトアームを用いてガラス基板を持ち上げた後の状態を示す正面図である。以下、上述した図1とこれら図2ないし図5とを参照して、本実施の形態における基板移載装置1Aにおける上述したリフト動作の詳細について説明する。
【0034】
まず、図1に示すように、ガラス基板200が載置されたトレイ100を支持した支持部20をリフト部10の下方に配置する。このとき、リフト部10に設けられた押圧ピン14のそれぞれがトレイ100の開放された周縁部上に位置することとなるように、支持部20のリフト部10に対する位置決めを行なう。なお、当該位置決め後の状態において、リフト部10に設けられたリフトアーム13がいずれもガラス基板200上に位置することがないように、リフトアーム13のそれぞれを予め側方に退避させた位置に移動させておく。
【0035】
次に、上述した昇降機構を用いてリフト部10を駆動することにより、リフト部10を支持部20側に向けて(すなわち、図1中に示す矢印A1方向に向けて)下降させる。なお、これに代えて、支持部20をリフト部10側に向けて上昇させることとしてもよい。
【0036】
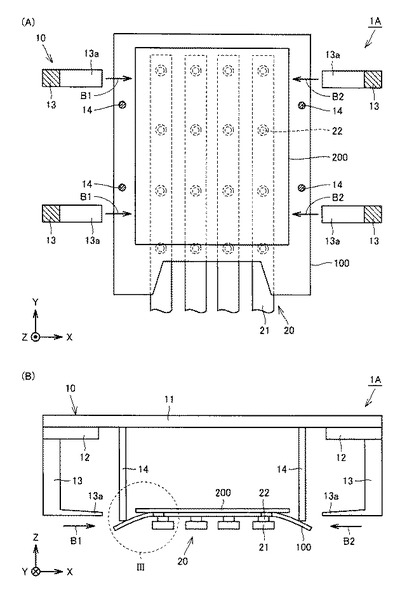
これにより、図2に示すように、トレイ100の開放された周縁部の上面に押圧ピン14の下端に位置する先端面が接触することになり、これに伴ってトレイ100の周縁部が下方に向けて撓み変形することになる。そのため、トレイ100とガラス基板200との間には、隙間G(図3参照)が形成されることになる。
【0037】
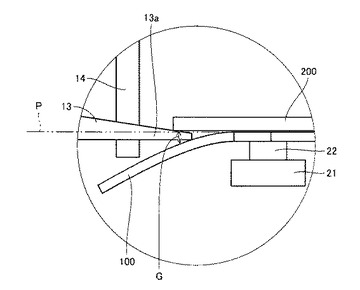
より詳細には、図3に示すように、押圧ピン14の下方に位置する先端面が支持部20によって支持されたトレイ100の上面である基準面Pよりも下方にまで達するようにリフト部10を下降させることにより、トレイ100の周縁部が図示するように大きく撓み変形することになり、これによってトレイ100の周縁部とガラス基板200の周縁部との間に隙間Gが生じる。
【0038】
次に、上述した移動機構12を用いてリフトアーム13を駆動することにより、リフトアーム13を支持部20側に向けて(すなわち、図2中に示す矢印B1,B2方向に向けて)移動させる。
【0039】
これにより、図4に示すように、リフトアーム13の支持爪部13aの先端部が、上述した隙間Gに対して側方から挿入されることになる。そのため、リフトアーム13の支持爪部13aの先端部がガラス基板200の周縁部の下方に位置することになり、ガラス基板200の周縁部がリフトアーム13の支持爪部13aによって支持されることになる。
【0040】
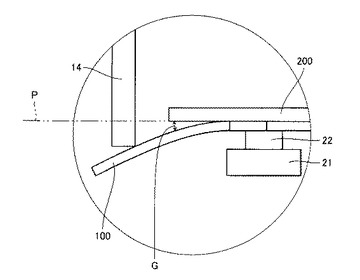
より詳細には、図5に示すように、上述した基準面Pが位置する部分の近傍においてリフトアーム13の支持爪部13aの先端部がガラス基板200の長辺側の端部よりも内側にまで達するようにリフトアーム13を移動させることにより、上記隙間Gの内部にまで支持爪部13aの先端部が挿入されることになり、これによってガラス基板200の周縁部が図示するように支持爪部13aの先端部の上面である上述した支持面によって支持される。
【0041】
ここで、トレイ100の周縁部を上方から押圧する部位である押圧ピン14の下端に位置する先端面の高さを、ガラス基板200の周縁部を下方から支持する部位であるリフトアーム13の上記支持面よりも下方に配置することとすれば、より確実にリフトアーム13によってガラス基板200を支持することが可能になる。
【0042】
また、図示するように、支持爪部13aの上記支持面を先端部側に向かうに連れて徐々に低くなるように傾斜面にて構成しておけば、支持爪部13aの先端部がスムーズに隙間Gに挿入されることになり、さらにより確実にリフトアーム13によってガラス基板200を支持することが可能になる。
【0043】
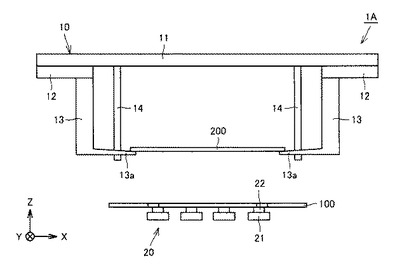
次に、上述した昇降機構を用いてリフト部10を駆動することにより、リフト部10を支持部20から遠ざける方向に向けて(すなわち、図4中に示す矢印A2方向に向けて)上昇させる。なお、これに代えて、支持部20をリフト部10から遠ざける方向に向けて下降させることとしてもよい。
【0044】
これにより、図6に示すように、トレイ100からガラス基板200のみを離脱させてガラス基板200を持ち上げることが可能になる。なお、ガラス基板200をリフトアーム13を用いて持ち上げた後においては、押圧ピン14によるトレイ100の周縁部に対する押圧も解除されることになり、これによりトレイ100が元の形状に復帰する。
【0045】
以上において説明したように、本実施の形態における基板移載装置1Aとすることにより、トレイ100上に載置されたガラス基板200をリフトアーム13を用いて確実に移載することが可能になる。すなわち、上述した隙間形成手段としての押圧ピン14の存在により、トレイ100の周縁部とガラス基板200の周縁部との間に隙間Gが形成されることになるため、ガラス基板200の周縁部の下面がトレイ100に接触している状態を容易に解除させることが可能になる。したがって、リフトアーム13を挿入させるだけのスペースが確実に確保できることになる。
【0046】
また、製造過程において熱処理等が実施された後のガラス基板200およびトレイ100には、不定形状の反りが生じている場合が多いが、上記構成の基板移載装置1Aを利用すれば、当該反りが生じている場合にも確実に上記隙間Gを形成することができるため、リフトアーム13を挿入させるだけのスペースを簡便に確保することが可能になる。特に、ガラス基板200やトレイ100に生じる反りのばらつきの程度に応じて、押圧ピン14の下端に位置する先端面の高さとリフトアーム13の支持面の高さとを適宜調節したり、あるいはリフトアーム13の支持面の傾斜の程度を適宜調節したりすれば、反りのばらつきが大きい場合等にも、十分なマージンをもって確実にこれを吸収することが可能になる。
【0047】
したがって、本実施の形態における基板移載装置1Aとすることにより、より確実にトレイ100からガラス基板200を離脱させることができる簡素な構成の基板移載装置とすることができる。そのため、製造ラインの突発的な停止の発生やガラス基板200に破損が生じてしまうことを防止することが可能になり、製造コストの削減にも大きく寄与することになる。
【0048】
(実施の形態2)
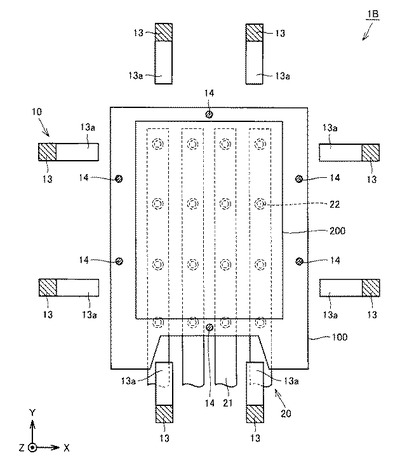
図7は、本発明の実施の形態2における基板移載装置の平面図である。以下においては、この図7を参照して、本実施の形態における基板移載装置1Bについて説明する。なお、上述した実施の形態1における基板移載装置1Aと同様の部分については図中同一の符号を付し、その説明はここでは繰り返さない。
【0049】
図7に示すように、基板移載装置1Bにあっては、ガラス基板200の一対の長辺に対応する部分にそれぞれ2つずつリフトアーム13が設けられているのみならず、ガラス基板200の一対の短辺に対応する部分にもそれぞれ2つずつリフトアーム13が設けられており、また、トレイ100の一対の長辺に対応する部分にそれぞれ2つずつ押圧ピン14が設けられているのみならず、トレイ100の一対の短辺に対応する部分にもそれぞれ1つずつ押圧ピン14が設けられている。
【0050】
ここで、トレイ100の一対の短辺に対応する部分に設けられた合計2つの押圧ピン14のそれぞれは、ガラス基板200の一対の短辺に対応する部分に設けられた合計4つのリフトアーム13のうち、片側の短辺に対応する部分に設けられた合計2つのリフトアーム13にそれぞれ対応付けて設けられており、個々の押圧ピン14は、これら2つのリフトアーム13の配設位置の近傍である中間位置に設けられている。
【0051】
なお、ここではその説明を省略するが、上記トレイ100およびガラス基板200の短辺側に配置されたリフトアーム13および押圧ピン14の具体的な構成や形状、動作等は、いずれも上記トレイ100およびガラス基板200の長辺側に配置されたリフトアーム13および押圧ピン14の構成や形状、動作等と同じである。
【0052】
このように構成した場合には、平面視略矩形状のトレイ100の全周囲において押圧ピン14を用いてほぼ均等にトレイ100の周縁部を押圧して撓ませることが可能になるとともに、平面視矩形状のガラス基板200の全周囲においてリフトアーム13によってより安定的にガラス基板200の周縁部を支持することが可能になる。したがって、当該基板移載装置1Bを用いることにより、より確実に安定してガラス基板200を移載することが可能になる。
【0053】
以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにあっては、リフトアーム13および押圧ピン14がいずれも単一のユニットであるリフト部10に一体化させて設けられた場合を例示して説明を行なったが、これらリフトアーム13および押圧ピン14が別々のユニットに個別に設けられるように構成されていてもよい。すなわち、リフトアーム13の昇降動作と押圧ピン14の昇降動作とが同時に行なわれる必要はなく、これらが時間差をもって別々の昇降機構によって実現されるように構成されていてもよい。
【0054】
また、以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにおいては、隙間形成手段として押圧ピン14を採用した場合を例示したが、これに代えて、ブロック状あるいは板状等の押圧部を用いることとしてもよいし、トレイ100を押圧することなくトレイ100の周縁部を撓ませる他の手段を利用することとしてもよい。上記他の手段としては、たとえばトレイ100の周縁部の下面を吸着保持し、これを下方に向けて引き下げることでトレイ100の周縁部に撓み変形を生じさせる吸着手段等が想定される。
【0055】
また、以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにあっては、支持部20が吸着パッド22を具備したロボットハンド21にて構成されている場合を例示して説明を行なったが、支持部20としては、吸着パッド22を具備しないロボットハンドや単なるステージ等であっても構わない。
【0056】
また、以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにあっては、リフトアーム13の支持面である支持爪部13aの先端部の上面が傾斜面にて構成されている場合を例示して説明を行なったが、当該支持爪部13aの先端部の上面が水平面等にて構成されていもよい。また、リフトアーム13の配設位置や数、形状および押圧ピン14の配設位置や数、形状等についても、上記の説明はあくまでも例示に過ぎず、適宜その変更が可能である。
【0057】
さらには、以上において説明した本発明の実施の形態1および2においては、トレイ100から離脱される基板としてガラス基板200を例示して説明を行なったが、基板としてはウェハ等の半導体基板であってもよいし、トレイ100としてもアルミ製のものに限られず、可撓性のものであれば他の材質のトレイであっても構わない。
【0058】
このように、今回開示した上記実施の形態はすべての点で例示であって、制限的なものではない。本発明の技術的範囲は特許請求の範囲によって画定され、また特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0059】
1A,1B 基板移載装置、10 リフト部、11 機枠、12 移動機構、13 リフトアーム、13a 支持爪部、14 押圧ピン、20 支持部、21 ロボットハンド、22 吸着パッド、100 トレイ、200 ガラス基板、G 隙間、P 基準面。
【技術分野】
【0001】
本発明は、基板を移載するための基板移載装置に関し、より特定的には、トレイ上に載置された基板をリフトアームを用いてトレイから離脱させて基板を移載する基板移載装置に関する。
【背景技術】
【0002】
太陽電池や液晶パネル、半導体装置等の製造工程においては、ワークである基板(ガラス基板や半導体基板等)を各種製造装置間や各種製造装置と基板カセット間等において頻繁に移載させることが必要になる。ここで、ワークである基板は、それ単体で移載される場合に限られず、当該基板が載置されたトレイごと移載される場合や、当該基板が載置されたトレイから基板のみが離脱されて移載される場合等がある。
【0003】
たとえば、特開2010−232465号公報(特許文献1)や特開2011−73875号公報(特許文献2)には、CVD(Chemical Vapor Deposition)装置のロードロック室に収容された、基板が載置されたトレイを、ロボットハンドを用いて基板カセットに移載する基板移載装置が開示されている。当該特許文献1および2においては、基板がトレイごと基板カセットに収納される場合を例示しているが、トレイから基板が離脱させられることにより、基板のみが基板カセットに収納される場合もある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−232465号公報
【特許文献2】特開2011−73875号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、基板の移載に使用される基板移載装置としては、各種のものが知られている。その一つにリフトアームを用いて基板を移載する基板移載装置がある。当該リフトアームを利用した基板移載装置は、他の種類の基板移載装置に比較して簡素な構成で実現できるため、設置コストが大幅に削減できるメリットがある。
【0006】
しかしながら、トレイ上に載置された基板をリフトアームを用いてトレイからリフトさせるためには、基板の下面をリフトアームによって支持することが必要になるが、通常、基板の下面はトレイの上面に接触しているため、これを実現することは必ずしも容易ではない問題があった。
【0007】
また、製造過程において熱処理等が実施された後の基板およびトレイには、不定形状の反りが生じている場合が多く、そのため反りの生じ方如何によっては基板をリフトすることすらままならない状況も考えられ、製造ラインの突発的な停止が頻繁に起こってしまうといった問題や基板に破損が生じてしまうといった問題等が生じる懸念があった。
【0008】
したがって、本発明は、上述した問題点を解決すべくなされたものであり、より確実にトレイからリフトアームを用いて基板を離脱させることができる簡素な構成の基板移載装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に基づく基板移載装置は、トレイ上に載置された基板を上記トレイから離脱させることによって上記基板を移載するものであって、上記トレイの周縁部の少なくとも一部を開放させた状態で上記トレイを支持する支持部と、上記トレイの開放された部分を下方に向けて撓み変形させることにより、上記トレイの周縁部と上記基板の周縁部との間に隙間を生じさせる隙間形成手段と、上記トレイの周縁部と上記基板の周縁部との間に生じた隙間に側方から挿入されることにより、上記基板の周縁部を下方から支持して上記基板を上記トレイから離脱させるリフトアームとを備えている。
【0010】
上記本発明に基づく基板移載装置にあっては、上記隙間形成手段および上記リフトアームの各々が、上記支持部を挟み込むように少なくとも一対以上設けられていることが好ましい。
【0011】
上記本発明に基づく基板移載装置にあっては、上記隙間形成手段が、上記トレイの開放された部分を上方から押圧する押圧部にて構成されていることが好ましい。
【0012】
上記本発明に基づく基板移載装置は、上記リフトアームおよび上記リフトアームを水平方向に沿って移動させる移動機構を含むリフト部と、上記リフト部を鉛直方向に沿って昇降させる昇降機構とをさらに備えていてもよい。その場合には、上記押圧部が、上記リフト部に一体的に設けられていることが好ましい。
【0013】
上記本発明に基づく基板移載装置にあっては、上記トレイを上方から押圧する部位である上記押圧部の先端面が、上記基板の周縁部を下方から支持する部位である上記リフトアームの支持面よりも下方に位置していることが好ましい。
【0014】
上記本発明に基づく基板移載装置にあっては、上記基板の周縁部を下方から支持する部位である上記リフトアームの支持面が、先端側に向かうに連れて徐々に低くなる傾斜面にて構成されていることが好ましい。
【0015】
上記本発明に基づく基板移載装置にあっては、上記支持部が、上記トレイを保持するための吸着パッドを具備してなるロボットハンドにて構成されていてもよい。
【発明の効果】
【0016】
本発明によれば、より確実にトレイからリフトアームを用いて基板を離脱させることができる簡素な構成の基板移載装置とすることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態1における基板移載装置の平面図および正面図である。
【図2】図1に示す基板移載装置において、リフト部を下降させた状態を示す平面図および正面図である。
【図3】図2に示す領域IIIの拡大図である。
【図4】図1に示す基板移載装置において、リフトアームの支持爪部をガラス基板の周縁部の下方に挿入させた状態を示す平面図および正面図である。
【図5】図4に示す領域Vの拡大図である。
【図6】図1に示す基板移載装置において、リフトアームを用いてガラス基板を持ち上げた後の状態を示す正面図である。
【図7】本発明の実施の形態2における基板移載装置の平面図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態について、図を参照して詳細に説明する。なお、以下に示す実施の形態1および2は、たとえばCVD装置のロードロック室に収容された、ガラス基板が載置されたアルミ製の薄板からなるトレイを、ロボットハンドを用いて当該ロードロック室から取り出した後に、トレイ上に載置されているガラス基板のみをリフトアームを用いてトレイから離脱させて基板カセットに移載する基板移載装置に本発明を適用した場合を例示するものである。
【0019】
(実施の形態1)
図1は、本発明の実施の形態1における基板移載装置の構成を示す図であり、(A)は平面図、(B)は正面図である。まず、この図1を参照して、本実施の形態における基板移載装置1Aの構成について説明する。
【0020】
図1に示すように、基板移載装置1Aは、ガラス基板200を持ち上げるためのユニットであるリフト部10と、ガラス基板200が載置されたトレイ100を支持するためのユニットである支持部20とを主として備えている。
【0021】
リフト部10は、ベースとなる機枠11と、当該機枠11に設けられた移動機構12と、当該移動機構12を介して機枠11に取付けられたリフトアーム13と、機枠11に移動機構12を介することなく直接取付けられた隙間形成手段である押圧部としての押圧ピン14とを有している。なお、リフト部10は、図示しない昇降機構によって駆動されることにより、図中に示すZ軸方向(すなわち鉛直方向)に沿って昇降可能となるように構成されている。
【0022】
ここで、基板移載装置1Aにあっては、平面視矩形状のガラス基板200を安定的に支持して移載するために、ガラス基板200の一対の長辺に対応する部分にそれぞれ2つずつリフトアーム13が設けられている。これにより、リフト部10は、合計で4つのリフトアーム13を有することになる。より詳細には、ガラス基板200が載置されたトレイ100を支持する支持部20を挟み込むように、図中に示すX軸方向に沿って対向して一対のリフトアーム13,13が配置されるとともに、当該一対のリフトアーム13,13が図中に示すY軸方向に沿って2組設けられている。
【0023】
移動機構12は、リフトアーム13を図中に示すX軸方向(すなわち水平方向)に沿って移動させるためのものであり、リフトアーム13を案内するガイド機構やリフトアームを駆動する駆動機構等を含んでいる。移動機構12は、上述した合計4つのリフトアーム13のそれぞれに対応して設けられており、個別にこれらリフトアーム13を駆動する。なお、これに代えて、ガラス基板200の一方の長辺に対応して配置された2つのリフトアーム13,13を単一の移動機構12を用いて同時に駆動することとしてもよい。
【0024】
リフトアーム13は、正面視略L字状の形状を有しており、その下端に支持爪部13aを有している。支持爪部13aは、いずれも支持部20側に向かって突出するように形成されており、当該支持爪部13aの先端部近傍の上面が、ガラス基板200を支持するための支持面として機能する。
【0025】
また、基板移載装置1Aにあっては、平面視略矩形状のトレイ100の周縁部を安定的に押圧可能にするために、トレイ100の一対の長辺に対応する部分にそれぞれ2つずつ押圧ピン14が設けられている。これにより、リフト部10は、合計で4つの押圧ピン14を有することになる。より詳細には、ガラス基板200が載置されたトレイ100を支持する支持部20を挟み込むように、図中に示すX軸方向に沿って対向して一対の押圧ピン14,14が配置されるとともに、当該一対の押圧ピン14,14が図中に示すY軸方向に沿って2組設けられている。
【0026】
押圧ピン14は、棒状の形状を有しており、その上端部が機枠11に固定されている。押圧ピン14は、下方に向かって延びるように形成されており、その下端に位置する先端面が、トレイ100を押圧するための部位として機能する。
【0027】
なお、合計4つの押圧ピン14のそれぞれは、上述した合計4つのリフトアーム13のそれぞれに対応付けて設けられており、個々の押圧ピン14は、リフトアーム13の配設位置の近傍に設けられている。
【0028】
一方、支持部20は、ベースとなるロボットハンド21と、当該ロボットハンド21上に設けられた吸着パッド22とを有している。より詳細には、ロボットハンド21は、互いに並行に延びる複数のアームを有しており、当該アームのそれぞれに複数の吸着パッド22が設けられている。なお、支持部20は、図示しない移動機構や昇降機構、旋回機構等によって駆動されることにより、水平面内における任意の方向や鉛直方向等に沿って自在に移動可能となるように構成されている。
【0029】
支持部20は、図示しないCVD装置のロードロック室において、当該ロードロック室に収容された、ガラス基板200が載置されたトレイ100の下方に挿入され、上述した吸着パッド22を用いてトレイ100の下面を吸着保持することにより、ガラス基板200ごとトレイ100を支持する。その後、支持部20は、上述した移動機構や昇降機構、旋回機構等によって駆動されることにより、ガラス基板200が載置されたトレイ100を支持した状態のままロードロック室から引き抜かれ、その後、上述したリフト部10の下方に移動されることになる。
【0030】
ここで、図示するように、支持部20は、トレイ100の周縁部を開放させた状態でトレイ100を支持する。これにより、トレイ100の周縁部の上面および下面は、いずれもロボットハンド21等によって遮られることなく露出した状態とされてリフト部10の下方に配置されることになる。
【0031】
本実施の形態における基板移載装置1Aは、後述するリフト動作を行なうことにより、支持部20によって支持されたトレイ100からリフト部10を用いてガラス基板200のみを離脱させることによってガラス基板200を持ち上げ、その後、当該リフト部10を用いてガラス基板200を図示しない基板カセットに収納するものである。
【0032】
ここで、基板移載装置1Aは、上述した隙間形成手段としての押圧ピン14を用いてトレイ100の周縁部を下方に向けて撓み変形させることにより、トレイ100とガラス基板200との間に隙間を生じさせるとともに、当該隙間に上述したリフトアーム13の支持爪部13aを挿入することにより、当該リフトアーム13にてガラス基板200の周縁部を下方から支持することでトレイ100からガラス基板200のみを離脱させて持ち上げることを可能にするものである。以下においては、その詳細について説明する。
【0033】
図2は、図1に示す基板移載装置において、リフト部を下降させた状態を示す平面図および正面図であり、図3は、図2に示す領域IIIの拡大図である。図4は、図1に示す基板移載装置において、リフトアームの支持爪部をガラス基板の周縁部の下方に挿入させた状態を示す平面図および正面図であり、図5は、図4に示す領域Vの拡大図である。また、図6は、図1に示す基板移載装置において、リフトアームを用いてガラス基板を持ち上げた後の状態を示す正面図である。以下、上述した図1とこれら図2ないし図5とを参照して、本実施の形態における基板移載装置1Aにおける上述したリフト動作の詳細について説明する。
【0034】
まず、図1に示すように、ガラス基板200が載置されたトレイ100を支持した支持部20をリフト部10の下方に配置する。このとき、リフト部10に設けられた押圧ピン14のそれぞれがトレイ100の開放された周縁部上に位置することとなるように、支持部20のリフト部10に対する位置決めを行なう。なお、当該位置決め後の状態において、リフト部10に設けられたリフトアーム13がいずれもガラス基板200上に位置することがないように、リフトアーム13のそれぞれを予め側方に退避させた位置に移動させておく。
【0035】
次に、上述した昇降機構を用いてリフト部10を駆動することにより、リフト部10を支持部20側に向けて(すなわち、図1中に示す矢印A1方向に向けて)下降させる。なお、これに代えて、支持部20をリフト部10側に向けて上昇させることとしてもよい。
【0036】
これにより、図2に示すように、トレイ100の開放された周縁部の上面に押圧ピン14の下端に位置する先端面が接触することになり、これに伴ってトレイ100の周縁部が下方に向けて撓み変形することになる。そのため、トレイ100とガラス基板200との間には、隙間G(図3参照)が形成されることになる。
【0037】
より詳細には、図3に示すように、押圧ピン14の下方に位置する先端面が支持部20によって支持されたトレイ100の上面である基準面Pよりも下方にまで達するようにリフト部10を下降させることにより、トレイ100の周縁部が図示するように大きく撓み変形することになり、これによってトレイ100の周縁部とガラス基板200の周縁部との間に隙間Gが生じる。
【0038】
次に、上述した移動機構12を用いてリフトアーム13を駆動することにより、リフトアーム13を支持部20側に向けて(すなわち、図2中に示す矢印B1,B2方向に向けて)移動させる。
【0039】
これにより、図4に示すように、リフトアーム13の支持爪部13aの先端部が、上述した隙間Gに対して側方から挿入されることになる。そのため、リフトアーム13の支持爪部13aの先端部がガラス基板200の周縁部の下方に位置することになり、ガラス基板200の周縁部がリフトアーム13の支持爪部13aによって支持されることになる。
【0040】
より詳細には、図5に示すように、上述した基準面Pが位置する部分の近傍においてリフトアーム13の支持爪部13aの先端部がガラス基板200の長辺側の端部よりも内側にまで達するようにリフトアーム13を移動させることにより、上記隙間Gの内部にまで支持爪部13aの先端部が挿入されることになり、これによってガラス基板200の周縁部が図示するように支持爪部13aの先端部の上面である上述した支持面によって支持される。
【0041】
ここで、トレイ100の周縁部を上方から押圧する部位である押圧ピン14の下端に位置する先端面の高さを、ガラス基板200の周縁部を下方から支持する部位であるリフトアーム13の上記支持面よりも下方に配置することとすれば、より確実にリフトアーム13によってガラス基板200を支持することが可能になる。
【0042】
また、図示するように、支持爪部13aの上記支持面を先端部側に向かうに連れて徐々に低くなるように傾斜面にて構成しておけば、支持爪部13aの先端部がスムーズに隙間Gに挿入されることになり、さらにより確実にリフトアーム13によってガラス基板200を支持することが可能になる。
【0043】
次に、上述した昇降機構を用いてリフト部10を駆動することにより、リフト部10を支持部20から遠ざける方向に向けて(すなわち、図4中に示す矢印A2方向に向けて)上昇させる。なお、これに代えて、支持部20をリフト部10から遠ざける方向に向けて下降させることとしてもよい。
【0044】
これにより、図6に示すように、トレイ100からガラス基板200のみを離脱させてガラス基板200を持ち上げることが可能になる。なお、ガラス基板200をリフトアーム13を用いて持ち上げた後においては、押圧ピン14によるトレイ100の周縁部に対する押圧も解除されることになり、これによりトレイ100が元の形状に復帰する。
【0045】
以上において説明したように、本実施の形態における基板移載装置1Aとすることにより、トレイ100上に載置されたガラス基板200をリフトアーム13を用いて確実に移載することが可能になる。すなわち、上述した隙間形成手段としての押圧ピン14の存在により、トレイ100の周縁部とガラス基板200の周縁部との間に隙間Gが形成されることになるため、ガラス基板200の周縁部の下面がトレイ100に接触している状態を容易に解除させることが可能になる。したがって、リフトアーム13を挿入させるだけのスペースが確実に確保できることになる。
【0046】
また、製造過程において熱処理等が実施された後のガラス基板200およびトレイ100には、不定形状の反りが生じている場合が多いが、上記構成の基板移載装置1Aを利用すれば、当該反りが生じている場合にも確実に上記隙間Gを形成することができるため、リフトアーム13を挿入させるだけのスペースを簡便に確保することが可能になる。特に、ガラス基板200やトレイ100に生じる反りのばらつきの程度に応じて、押圧ピン14の下端に位置する先端面の高さとリフトアーム13の支持面の高さとを適宜調節したり、あるいはリフトアーム13の支持面の傾斜の程度を適宜調節したりすれば、反りのばらつきが大きい場合等にも、十分なマージンをもって確実にこれを吸収することが可能になる。
【0047】
したがって、本実施の形態における基板移載装置1Aとすることにより、より確実にトレイ100からガラス基板200を離脱させることができる簡素な構成の基板移載装置とすることができる。そのため、製造ラインの突発的な停止の発生やガラス基板200に破損が生じてしまうことを防止することが可能になり、製造コストの削減にも大きく寄与することになる。
【0048】
(実施の形態2)
図7は、本発明の実施の形態2における基板移載装置の平面図である。以下においては、この図7を参照して、本実施の形態における基板移載装置1Bについて説明する。なお、上述した実施の形態1における基板移載装置1Aと同様の部分については図中同一の符号を付し、その説明はここでは繰り返さない。
【0049】
図7に示すように、基板移載装置1Bにあっては、ガラス基板200の一対の長辺に対応する部分にそれぞれ2つずつリフトアーム13が設けられているのみならず、ガラス基板200の一対の短辺に対応する部分にもそれぞれ2つずつリフトアーム13が設けられており、また、トレイ100の一対の長辺に対応する部分にそれぞれ2つずつ押圧ピン14が設けられているのみならず、トレイ100の一対の短辺に対応する部分にもそれぞれ1つずつ押圧ピン14が設けられている。
【0050】
ここで、トレイ100の一対の短辺に対応する部分に設けられた合計2つの押圧ピン14のそれぞれは、ガラス基板200の一対の短辺に対応する部分に設けられた合計4つのリフトアーム13のうち、片側の短辺に対応する部分に設けられた合計2つのリフトアーム13にそれぞれ対応付けて設けられており、個々の押圧ピン14は、これら2つのリフトアーム13の配設位置の近傍である中間位置に設けられている。
【0051】
なお、ここではその説明を省略するが、上記トレイ100およびガラス基板200の短辺側に配置されたリフトアーム13および押圧ピン14の具体的な構成や形状、動作等は、いずれも上記トレイ100およびガラス基板200の長辺側に配置されたリフトアーム13および押圧ピン14の構成や形状、動作等と同じである。
【0052】
このように構成した場合には、平面視略矩形状のトレイ100の全周囲において押圧ピン14を用いてほぼ均等にトレイ100の周縁部を押圧して撓ませることが可能になるとともに、平面視矩形状のガラス基板200の全周囲においてリフトアーム13によってより安定的にガラス基板200の周縁部を支持することが可能になる。したがって、当該基板移載装置1Bを用いることにより、より確実に安定してガラス基板200を移載することが可能になる。
【0053】
以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにあっては、リフトアーム13および押圧ピン14がいずれも単一のユニットであるリフト部10に一体化させて設けられた場合を例示して説明を行なったが、これらリフトアーム13および押圧ピン14が別々のユニットに個別に設けられるように構成されていてもよい。すなわち、リフトアーム13の昇降動作と押圧ピン14の昇降動作とが同時に行なわれる必要はなく、これらが時間差をもって別々の昇降機構によって実現されるように構成されていてもよい。
【0054】
また、以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにおいては、隙間形成手段として押圧ピン14を採用した場合を例示したが、これに代えて、ブロック状あるいは板状等の押圧部を用いることとしてもよいし、トレイ100を押圧することなくトレイ100の周縁部を撓ませる他の手段を利用することとしてもよい。上記他の手段としては、たとえばトレイ100の周縁部の下面を吸着保持し、これを下方に向けて引き下げることでトレイ100の周縁部に撓み変形を生じさせる吸着手段等が想定される。
【0055】
また、以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにあっては、支持部20が吸着パッド22を具備したロボットハンド21にて構成されている場合を例示して説明を行なったが、支持部20としては、吸着パッド22を具備しないロボットハンドや単なるステージ等であっても構わない。
【0056】
また、以上において説明した本発明の実施の形態1および2における基板移載装置1A,1Bにあっては、リフトアーム13の支持面である支持爪部13aの先端部の上面が傾斜面にて構成されている場合を例示して説明を行なったが、当該支持爪部13aの先端部の上面が水平面等にて構成されていもよい。また、リフトアーム13の配設位置や数、形状および押圧ピン14の配設位置や数、形状等についても、上記の説明はあくまでも例示に過ぎず、適宜その変更が可能である。
【0057】
さらには、以上において説明した本発明の実施の形態1および2においては、トレイ100から離脱される基板としてガラス基板200を例示して説明を行なったが、基板としてはウェハ等の半導体基板であってもよいし、トレイ100としてもアルミ製のものに限られず、可撓性のものであれば他の材質のトレイであっても構わない。
【0058】
このように、今回開示した上記実施の形態はすべての点で例示であって、制限的なものではない。本発明の技術的範囲は特許請求の範囲によって画定され、また特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0059】
1A,1B 基板移載装置、10 リフト部、11 機枠、12 移動機構、13 リフトアーム、13a 支持爪部、14 押圧ピン、20 支持部、21 ロボットハンド、22 吸着パッド、100 トレイ、200 ガラス基板、G 隙間、P 基準面。
【特許請求の範囲】
【請求項1】
トレイ上に載置された基板を前記トレイから離脱させることによって前記基板を移載する基板移載装置であって、
前記トレイの周縁部の少なくとも一部を開放させた状態で前記トレイを支持する支持部と、
前記トレイの開放された部分を下方に向けて撓み変形させることにより、前記トレイの周縁部と前記基板の周縁部との間に隙間を生じさせる隙間形成手段と、
前記トレイの周縁部と前記基板の周縁部との間に生じた隙間に側方から挿入されることにより、前記基板の周縁部を下方から支持して前記基板を前記トレイから離脱させるリフトアームとを備えた、基板移載装置。
【請求項2】
前記隙間形成手段および前記リフトアームの各々が、前記支持部を挟み込むように少なくとも一対以上設けられている、請求項1に記載の基板移載装置。
【請求項3】
前記隙間形成手段が、前記トレイの開放された部分を上方から押圧する押圧部にて構成されている、請求項1または2に記載の基板移載装置。
【請求項4】
前記リフトアームおよび当該リフトアームを水平方向に沿って移動させる移動機構を含むリフト部と、
前記リフト部を鉛直方向に沿って昇降させる昇降機構とをさらに備え、
前記押圧部が、前記リフト部に一体的に設けられている、請求項3に記載の基板移載装置。
【請求項5】
前記トレイを上方から押圧する部位である前記押圧部の先端面が、前記基板の周縁部を下方から支持する部位である前記リフトアームの支持面よりも下方に位置している、請求項4に記載の基板移載装置。
【請求項6】
前記基板の周縁部を下方から支持する部位である前記リフトアームの支持面が、先端側に向かうに連れて徐々に低くなる傾斜面にて構成されている、請求項1から5のいずれかに記載の基板移載装置。
【請求項7】
前記支持部が、前記トレイを保持するための吸着パッドを具備してなるロボットハンドにて構成されている、請求項1から6のいずれかに記載の基板移載装置。
【請求項1】
トレイ上に載置された基板を前記トレイから離脱させることによって前記基板を移載する基板移載装置であって、
前記トレイの周縁部の少なくとも一部を開放させた状態で前記トレイを支持する支持部と、
前記トレイの開放された部分を下方に向けて撓み変形させることにより、前記トレイの周縁部と前記基板の周縁部との間に隙間を生じさせる隙間形成手段と、
前記トレイの周縁部と前記基板の周縁部との間に生じた隙間に側方から挿入されることにより、前記基板の周縁部を下方から支持して前記基板を前記トレイから離脱させるリフトアームとを備えた、基板移載装置。
【請求項2】
前記隙間形成手段および前記リフトアームの各々が、前記支持部を挟み込むように少なくとも一対以上設けられている、請求項1に記載の基板移載装置。
【請求項3】
前記隙間形成手段が、前記トレイの開放された部分を上方から押圧する押圧部にて構成されている、請求項1または2に記載の基板移載装置。
【請求項4】
前記リフトアームおよび当該リフトアームを水平方向に沿って移動させる移動機構を含むリフト部と、
前記リフト部を鉛直方向に沿って昇降させる昇降機構とをさらに備え、
前記押圧部が、前記リフト部に一体的に設けられている、請求項3に記載の基板移載装置。
【請求項5】
前記トレイを上方から押圧する部位である前記押圧部の先端面が、前記基板の周縁部を下方から支持する部位である前記リフトアームの支持面よりも下方に位置している、請求項4に記載の基板移載装置。
【請求項6】
前記基板の周縁部を下方から支持する部位である前記リフトアームの支持面が、先端側に向かうに連れて徐々に低くなる傾斜面にて構成されている、請求項1から5のいずれかに記載の基板移載装置。
【請求項7】
前記支持部が、前記トレイを保持するための吸着パッドを具備してなるロボットハンドにて構成されている、請求項1から6のいずれかに記載の基板移載装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−110268(P2013−110268A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254065(P2011−254065)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]