
基準パターン抽出方法、位置決め方法及び装置、並びに露光装置
【課題】埃等の不着の無い部分から基準パターンの抽出を行えるようにする。
【解決手段】実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法である。前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の信号情報を計測する工程(S12)と、この工程で計測された信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出する工程(S17)と、前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を計測する工程S22と、この工程で計測された信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出する工程S23と、前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する工程S25とを備えている。
【解決手段】実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法である。前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の信号情報を計測する工程(S12)と、この工程で計測された信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出する工程(S17)と、前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を計測する工程S22と、この工程で計測された信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出する工程S23と、前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する工程S25とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法、及び該方法を用いて抽出された基準パターンを用いて物体を位置決めする位置決め方法及び装置、並びに該位置決め装置を備える露光装置に関する。
【背景技術】
【0002】
半導体素子や液晶表示素子等のデバイスを製造する露光装置は、パターンが形成されたマスク又はレチクルと、ウエハやガラスプレート等の基板(物体)上に既に形成されているパターンとを高精度に位置合わせした状態で、マスクのパターンを基板上に転写する必要があるため、位置合わせ用のマーク(アライメントマーク)の位置を検出するアライメントセンサを備えている。このアライメントセンサとしては、ハロゲンランプ等の波長帯域幅の広い光源を用いてマークを照明しマークの像をCCD(Charge Coupled Device)等の撮像装置で撮像して得られる画像情報(画素情報)を画像処理して位置計測を行うFIA(Field Image Alignment)方式のものなどが用いられている。
【0003】
ところで、半導体素子や液晶表示素子等のデバイスの製造においては、レチクルに形成されたパターンの像を基板上に投影露光することが繰り返し行われる。このため、製造プロセスを経るにつれ基板上に形成されたマークが劣化してしまい、その位置情報を高い精度で検知することが困難になる場合がある。これの対策として、マークを計測する代わりに、あるいはそのようなマークの計測を前提とせずに、基板上のある領域でユニークな信号特徴を有する特徴部分を抽出して、これを基準パターンとしてテンプレートを生成し、このテンプレートを用いて、当該特徴部分をマークの代用として計測する技術が開発されている(例えば、特許文献1参照)。この特許文献1には、基板上に形成されるべきパターンの設計データから、当該特徴部分を抽出して、この設計データからテンプレートを作成するもの、あるいは同様に設計データから抽出された特徴部分を含む領域を撮像して、該特徴部分に対応する計測データを用いてテンプレートを作成するもの等が開示されている。また、このような設計データから特徴部分を抽出するのではなく、基板を実際に計測した計測データから特徴部分の抽出及びテンプレートの作成を行うことも可能である。
【0004】
特徴部分の抽出は、ある領域(例えば、計測用の撮像装置の撮像視野)内で、他に同一又は類似の部分がないように、該領域よりも小さい領域のユニークさが所定のアルゴリズムに従って行われるので、計測データから特徴部分の抽出を行う場合に、例えば、基板上に埃や塵等が不着していると、当該埃等は不特定な形状や不着の仕方をしているため、当該埃等を含む部分はユニークさが高い場合が多く、当該埃等を含む部分が特徴部分として抽出されることになる。
【0005】
しかしながら、そのような埃等が不着しているためにユニークであると判断された部分(基板上の特定位置あるいはショット内の特定位置)は、他の基板に全く同じ位置関係で、あるいは同じ基板上の異なるショット内においてショット基準でみて全く同じ位置関係で埃等が不着する可能性は極めて低いので、その部分がマークの代用としての機能を果たすことはできず、仮にそれを用いたとすれば、計測エラーあるいは誤差の大きい検出結果となってしまうことになる。従って、基準パターンの抽出は、そのような埃等の不着の無い部分から行う必要がある。
【0006】
本発明はこのような点に鑑みてなされたものであり、埃等の不着の無い部分から基準パターンの抽出を行えるようにして、計測精度の向上を図り、基板の位置決め精度の向上、露光精度の向上、ひいては高品質、高性能、高信頼なデバイス等を製造できるようにすることを目的とする。
【特許文献1】国際公開WO2005/001593号パンフレット
【発明の開示】
【課題を解決するための手段】
【0007】
本発明によると、実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法であって、前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の信号情報を計測する第1工程と、前記第1工程で計測された信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出する第2工程と、前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を計測する第3工程と、前記第3工程で計測された信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出する第4工程と、前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する第5工程と、を備える基準パターン抽出方法が提供される。
【0008】
本発明では、第1所定領域内で計測された信号情報に基づいて抽出された候補パターンの基準パターンとしての適性を、該第1所定領域とは異なる第2所定領域内で計測された信号情報に基づいて抽出された、該候補パターンに対応する比較パターンに基づいて判断するようにしている。第1所定領域と第2所定領域には、実質的に同一の加工(例えば、露光処理)が施されているので、候補パターンの抽出の際に例えば埃や塵等が不着しているためにユニークであると判断されて抽出された第1所定領域内の候補パターンは、第2所定領域内のこれに対応する比較パターンにも同じ傾向で埃等が不着している可能性は低いため、その相違性が高くなることになり、この逆に、候補パターンと比較パターンの一致性が高ければ、候補パターンに埃等が不着している可能性は低いことになる。従って、候補パターンを比較パターンに基づいてその適性を判断することにより、埃等の不着のない信頼性の高い基準パターンを抽出することが可能となる。
【発明の効果】
【0009】
本発明によると、埃等の不着の無い部分から基準パターンの抽出を行えるようにしたので、計測精度を向上することができ、例えば露光処理に適用した場合には、物体の位置決め精度の向上、露光精度の向上、ひいては高品質、高性能、高信頼なデバイス等を製造できるようになるという効果がある。
【発明を実施するための最良の形態】
【0010】
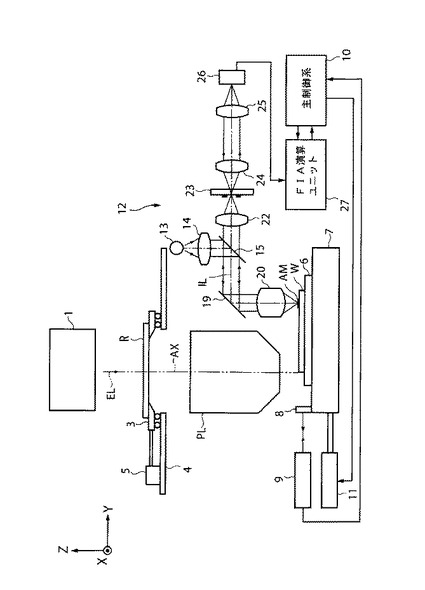
以下、図面を参照して本発明の実施形態を詳細に説明する。図1は、本発明の実施形態に係る露光装置の全体構成を示す図である。本実施形態においては、オフアクシス方式のアライメントセンサを備えたステップ・アンド・スキャン方式の露光装置を例に挙げて説明する。なお、以下の説明においては、図1中に示されたXYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部材の位置関係について説明する。
【0011】
図1において、照明光学系1から射出された露光光ELは、ほぼ均一な照度でレチクルRを照明する。レチクルRはレチクルステージ3上に保持され、レチクルステージ3はベース4上の2次元平面内で移動及び微小回転ができるように支持されている。装置全体の動作を制御する主制御系10が、ベース4上の駆動装置5を介してレチクルステージ3の動作を制御する。なお、照明光学系1が射出する露光光ELとしては、g線(波長436nm)、i線(波長365nm)、KrFエキシマレーザ光(波長248nm)、ArFエキシマレーザ光(波長193nm)、F2レーザ光(波長157nm)、X線や電子線などの荷電粒子線等が用いられる。
【0012】
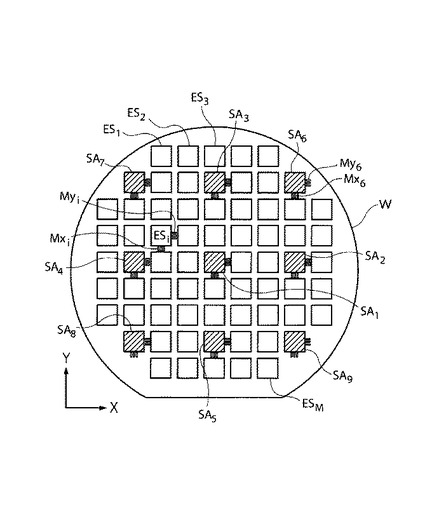
露光光ELのもとで、レチクルRのパターン像が投影光学系PLを介してウエハW上のショット領域に投影される。ここで、ウエハWについて図2を参照して概説する。ウエハW上には複数のショット領域ES1〜ESMが規則的に形成されている。各ショット領域ESiにはそれまでの工程を経て同一の製造プロセス(露光処理や現像処理等を含む加工処理)が施されることによりそれぞれチップパターンが形成されている。また、各ショット領域ESiはX方向及びY方向に伸びる所定幅のストリートライン(スクライブライン)で区切られており、各ショット領域ESiに接するストリートライン上にアライメントマークMxi,Myiが形成されている。これらのアライメントマークMxi,Myiは、例えば、同図に示すように、それぞれX方向及びY方向に所定ピッチで3本の直線パターンを並べたものであり、ウエハWの下地に凹部又は凸部のパターンとして形成されている。また、ウエハW上に設定された複数のショット領域ES1〜ESMの内、予め所定数のショット領域がサンプルショット(サンプル領域)として選択されている。図2では、斜線を付した9個のショット領域がサンプルショットSA1〜SA9として選択されている。ここでは、アライメントマークの計測は、これらのサンプルショットSA1〜SA9に付随したマークMxi,Myiについて行われるものとする。なお、ウエハWに形成されるマークの形状は、このような1次元マークに限られず、二次元計測用のマーク、その他の構成のマークでもよい。
【0013】
また、本実施形態の露光装置は、後述するように、ショット領域ES1〜ESM内に任意に設定される該ショット領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有するパターン(基準パターン又はテンプレートパターン)をアライメントマークの代わりとして計測して、位置決め等を行う機能を備えている。この機能は、アライメントマークが製造プロセスを経るにつれて劣化してしまい、その位置情報を高い精度で検知することができない場合やアライメントマークを全く形成しない場合にも、ショット領域の配列を正確に求めて、位置決めするための機能である。この機能の詳細は、後に詳述する。
【0014】
図1に戻り、ウエハWはウエハホルダ6を介してウエハステージ7上に載置されている。ウエハステージ7は、投影光学系PLの光軸AXに垂直な面内でウエハWを2次元的に位置決めするXYステージ、投影光学系PLの光軸AXに平行な方向(Z方向)にウエハWを位置決めするZステージ、及びウエハWを微小回転させるステージ等より構成されている。ウエハステージ7の位置及び回転角は、ウエハステージ7に固定された移動鏡8にレーザ光を照射して相対位置変化を計測するレーザ干渉計9により計測される。レーザ干渉計9により計測されたX座標、Y座標、及び回転角の情報は主制御系10に供給され、主制御系10は、供給された座標をモニターしつつ駆動系11を介して、ウエハステージ7の位置決め動作を制御する。なお、図1には示していないが、レチクル側にもウエハ側と同様の干渉計システムが設けられている。
【0015】
また、投影光学系PLの側面にはオフ・アクシスのアライメントセンサ12が配置されている。ブロードバンド光を発生するハロゲンランプ等の光源13からの照明光がコリメータレンズ14によって平行光に変換され、ハーフミラー15で反射された後、照明光ILはミラー19で反射され、対物レンズ20で集光されて、ウエハW上のマークAM又は基準パターンを含む領域を落射照明する。マークAM又は基準パターンを含む領域からの反射光は、対物レンズ20を介してミラー19によって反射された後、ハーフミラー15を透過してレンズ系22によって指標板23上に結像される。この指標板23には、マークAM又は基準パターンの位置情報を計測する際の基準となる指標マークが形成されている。指標板23は対物レンズ20とレンズ系22とによってウエハWと共役に配置される。ウエハWのマークAM又は基準パターンの像と指標マークとは、リレー系24,25を介して撮像素子26の撮像面に結像する。撮像素子26としては、例えば二次元CCD(Charge Coupled Device)が用いられる。撮像素子26は、同図では1つ示したが、X方向計測用の撮像素子とY方向計測用の撮像素子の2つが設けられる場合がある。
【0016】
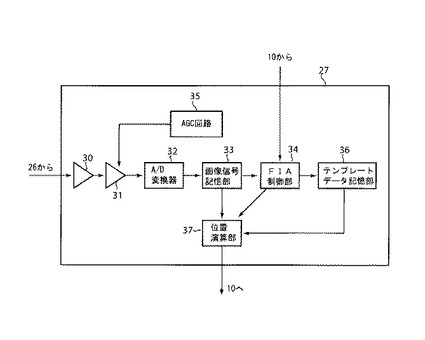
撮像素子26は撮像面に結像した光学像を電気信号に変換する。撮像素子26の撮像面には入射した光を受光して電気信号に変換する受光素子が配列されている。撮像素子26は配列された受光素子を順次走査することにより撮像面に入射する像を画像信号に変換する。撮像素子26から出力される画像信号はFIA演算ユニット27へ出力される。FIA演算ユニット27は撮像素子26から出力される画像信号に対して種々の信号処理を施してマークAM又は基準パターンの位置情報を演算により求める。FIA演算ユニット27は、図3に示すように、プリアンプ30、増幅器31、A/D(アナログ・ディジタル)変換器32、画像信号記憶部(メモリ)33、FIA制御部34、AGC(Automatic Gain Control:自動利得制御)回路35、テンプレートデータ記憶部(メモリ)36、及び位置演算部37を備えている。プリアンプ30は、撮像素子26から出力される画像信号を予め設定された固定の増幅率で増幅する。このプリアンプ30は、画像信号を直接高い増幅率で増幅した場合に生ずるノイズの発生を低減するために設けられる。増幅器31は、AGC回路35によってその増幅率が制御され、プリアンプ30から出力される画像信号をA/D変換器32による信号処理に最適な電圧範囲の画像信号に増幅する。A/D変換器32は、増幅器31によって増幅された画像信号に対してA/D変換処理を施してディジタル信号に変換する。画像信号記憶部33は、ディジタル化された画像信号(ここでは、2次元信号)を記憶する。
【0017】
FIA制御部34は、主制御系10による制御の下、このFIA演算ユニット27を全体的に制御する。テンプレートデータ記憶部36には、マーク計測の際に位置演算部37により行われるテンプレートマッチング処理で用いられるテンプレートデータが予め記憶されている。位置演算部37は、テンプレートデータ記憶部36に格納されたテンプレートデータを用いて、画像信号記憶部33に記憶されている画像信号に対してテンプレートマッチング処理を含む演算処理を行って、マークAM又は基準パターンの位置情報(マークAM又は基準パターンの中心と指標マークの中心とのX及びY方向におけるずれ量)を求め、主制御系10へ出力する。なお、テンプレートデータ記憶部36には、ウエハW上のアライメントマークAMを計測する場合には該マークAMに対応するテンプレートデータが、基準パターンを計測する場合には該基準パターンに対応するテンプレートデータが記憶されている。また、FIA制御部34は、詳細は後述するが、画像信号記憶部33に格納された画像情報に基づいて、ショット領域内の回路や配線の一部であってユニークなパターンである基準パターンの抽出及びテンプレートを生成してテンプレートデータとしてテンプレートデータ記憶部36に格納する処理(基準パターンの抽出及びテンプレート生成処理)をも行う。
【0018】
テンプレートマッチング処理では、画像信号記憶部33の2次元の画像信号を計測方向に直交する非計測方向に積算して、計測方向に関する1次元信号を算出し、計測方向に対応したテンプレートとマッチングする(相関性の高い)位置を求めて、マークAM又は基準パターンの当該計測方向における中心位置を求める。なお、テンプレートマッチング処理は、ここでは画像信号を1次元信号に変換したものについて行うものとしたが、2次元信号のまま行うようにしてもよいし、積算の方向や方法もこれと異なっていてもよい。また、アライメントマークAMを計測する際には、上述したテンプレートマッチング法以外に、左右が対称となる折り返し点を算出して中心位置とする折り返し自己相関法、あるいはアライメントマークAMのエッジ位置を求めるエッジ位置検出法として、スライス法、最大傾斜法等を用いてもよい。スライス法は当該1次元信号の信号強度が最大値と最小値に対して一定の割合になる位置をエッジ位置と見なすものであり、最大傾斜法は当該1次元信号の微分値の絶対値が最大となる位置をエッジ位置とするものである。なお、ここでは、アライメントマークAM又は基準パターンの中心を求めるものとするが、該マーク又AMは該基準パターンを代表する点であればよく、必ずしも中心である必要はない。位置演算部37による演算結果(アライメントマークAM又は基準パターンと指標パターンとのずれ量)は主制御系10に送られ、主制御系10は送られた演算結果とレーザ干渉計9からのウエハステージ7の位置情報とに基づいて、該アライメントマークAM又は該基準パターンの位置を算出する。
【0019】
次に、基準パターンの抽出及びテンプレートデータの生成処理について、図4及び図5に示すフローチャートを参照して説明する。この処理は、主としてFIA演算ユニット27のFIA制御部34によって行われる処理であり、ウエハW上のアライメントマークAMがプロセスを経るにつれて劣化した場合、アライメントマークAMが形成されていない場合、その他必要に応じて行われる処理である。この基準パターンの抽出及びテンプレートデータの生成処理の対象となるウエハWは、例えば、複数のウエハWに対して同一のプロセス処理が行われる単位であるロットの先頭のウエハ、あるいは同一のプロセス処理が行われる複数のロットがある場合には当該複数のロットの先頭のウエハWについて行われる。但し、必要に応じて、ロットの途中で行っても、あるいはロット処理とは別にロット先頭又はロット中のウエハWを用いて事前に行っても勿論よい。
【0020】
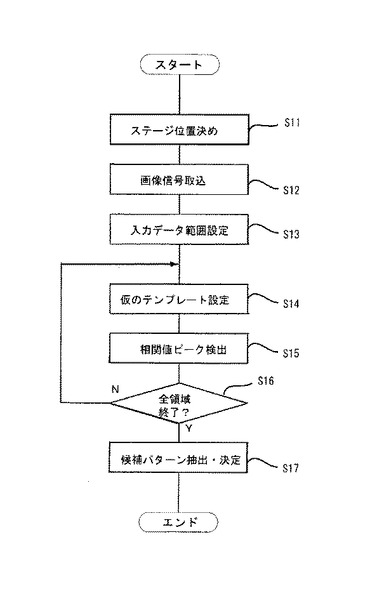
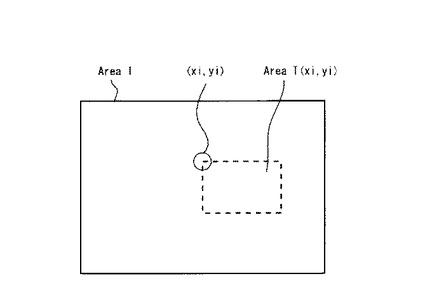
まず、当該ウエハWをウエハステージ7のウエハホルダ6上にローディングし、ウエハW上の撮像すべき箇所をアライメントセンサ12に対して位置決めし(S11)、画像信号を取り込む(S12)。具体的には、該ウエハW上の予め決められた所定のショット領域(ここでは、図2のサンプルショットSA1とする)内の予め決められた所定の領域を被計測領域として、該被計測領域がアライメントセンサ12の計測視野内に含まれるように、ウエハステージ7を位置決めし、画像信号を取り込む。この画像信号は、上述したようにFIA演算ユニット27の画像信号記憶部33に記憶される。次いで、取り込んだ画像信号に対して、被計測領域としての入カデータの範囲を設定する(S13)。ウエハWの投入動作に起因する誤差やパターンの製造処理に起因する誤差等により、撮像される範囲は所定の範囲内でばらつく。そのようなばらつきがあっても、必ず撮像範囲に含まれる領域を、入カデータの範囲として設定するのが好ましい。撮像された画像信号中に必ず基準パターンが含まれる必要があるからである。但し、入カデータ範囲は、これに限られず任意に設定してよい。本実施形態においては、撮像視野(有効視野)内の2次元の画像信号上に、例えば図6に示すような領域(入力データ範囲)AreaIを設定する。
【0021】
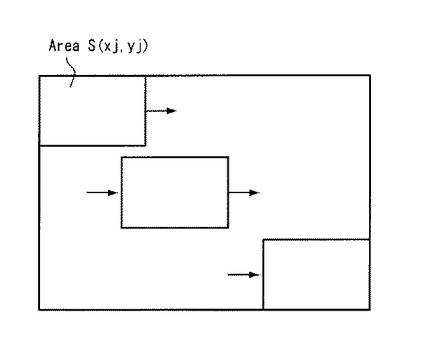
入カデータ範囲を設定したら、その範囲内に、予め定められているテンプレートの大きさと同じサイズの領域を設定し、仮のテンプレートとする(ステップS14)。図6に示す例においては、テンプレートと同じサイズの領域AreaT(xi,yi)が入カデータ範囲AreaI内に設定される。なお、(xi,yi)は、領域AreaTの基準点の座標値(図6の例では、領域AreaTの左上角点の座標値)である。次に、入カデータ範囲の全域について、仮のテンプレートとの相関サーチ計算を行い、相関値が所定のしきい値を越え、なおかつピークとなる位置を検出する(ステップS15)。即ち、図7に示すように、入カデータ範囲AreaIをテンプレート(仮のテンプレートAreaT)と同じサイズの窓で走査し、各位置における窓内の領域AreaS(xj、yj)の画像信号と仮のテンプレートAreaT(xi,yi)の画像信号との相関値を順次求める。そして、相関値が十分に高く、ピークとなっている領域を検出する。この時、相関サーチ計算は、下記の式(1)又は式(2)に基づいて行う。なお、式(1)及び式(2)のいずれの式を用いるかは、場合によって使い分ける。
【数1】

【0022】
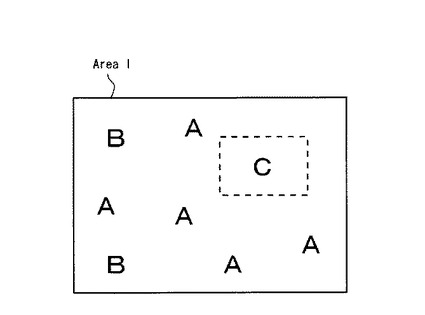
このような仮のテンプレートの設定(S14)及び相関値ピークの検出(S15)を、入カデータ範囲AreaI内に設定し得る全ての領域(テンプレートと同じサイズの領域)に対して行い、各領域に対する相関値ピークを示す領域を検出する(S16)。同一の仮のテンプレートに対して相関値ピークを示す領域は、各々同一の画像信号、即ち同一のパターンにより構成された領域と見ることができる。従って、相関値ピークを示す領域の検出により、同一のパターンにより構成される領域が各パターンごとに検出される。例えば、図8に示すように、領域AreaI中に、パターンAで構成される領域が5ヶ所、パターンBで構成される領域が2ヶ所、パターンCで構成される領域が1ヶ所存在することが検出される。
【0023】
このように入カデータ範囲AreaI内に存在するパターンの構成が検出されたら、その中から、基準パターンの候補としての候補パターンを抽出・決定する(S17)。具体的には、まず、入カデータ範囲AreaI内に存在するパターンの中から、自分自身以外にピークを持たず単一的に(ユニークに)存在するパターンを検出し、即ち、自分自身以外にピークを持たないユニークな領域AreaT(xi,yi)(=AreaS(xj,yj))を検出し、これを候補パターンとする。例えば、図8に示す例においては、1ヶ所にのみ存在するパターンC(パターンCで表す領域AreaT(xi,yi)の画像信号)を、候補パターンして決定する。
【0024】
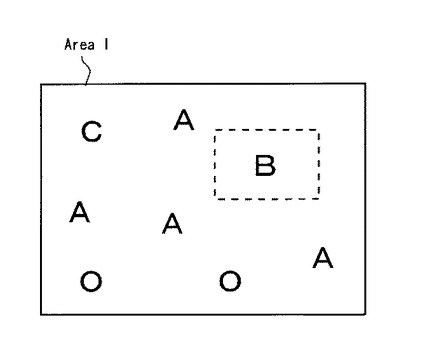
ところで、自分自身以外にピークを持たない仮のテンプレートAreaT(xi,yi)が複数検出された場合には、最も相関値が高いもの(相関値ピークとして検出された自分自身)と2番目に高いもの(相関値ピークとして検出されなかった領域の中で最も相関値の高いもの)との相関値の差(特徴値の差)が、最も大きい仮のテンプレートAreaT(xi,yi)に係るパターンを候補パターンとして決定する。この相関値の差がSN比に相当することになるので、差が大きいほど安定したテンプレートを生成することができるからである。このことについて、図9を用いて具体的に説明する。例えば、図9に示すように、領域AreaI中に、パターンA、B,Cに加えて、パターンCと形状が似ているパターンOが存在していたとする。このような場合、入カデータ範囲AreaI内には、パターンBとパターンCという2つのユニークなパターンが存在する。しかし、パターンCには、これに形状が類似しているパターンOが存在するため、パターンCを仮のテンプレートとした時のパターンCとパターンOに対する相関値の差は小さくなる。従って、図9のような場合には、パターンBを候補パターンとして選択する。
【0025】
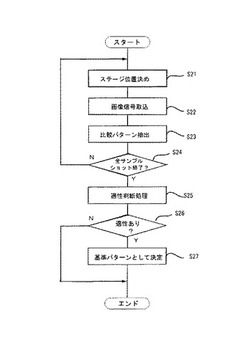
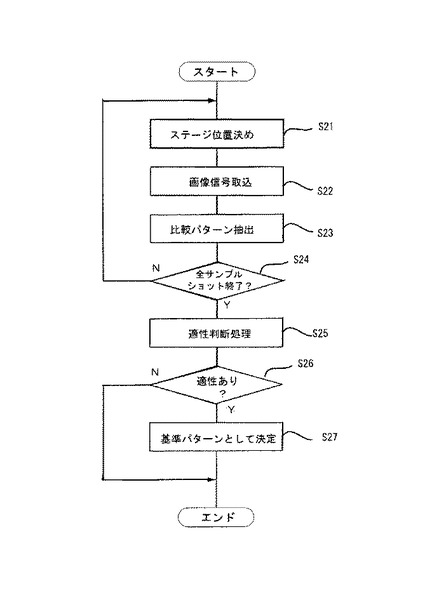
候補パターンが決定したならば、該候補パターンの基準パターンとしての適性を判断するため、図5に示す適性判断処理を行う。まず、S12で画像信号を取り込んだショット領域(ここでは、図2のサンプルショットSA1)とは異なるショット領域であって予め決められた所定のショット領域(ここでは、図2のサンプルショットSA2とする)内の予め決められた所定の領域を被計測領域として、該被計測領域がアライメントセンサ12の計測視野内に含まれるように、ウエハステージ7を位置決めし(S21)、画像信号を取り込む(S22)。この画像信号は、FIA演算ユニット27の画像信号記憶部33に記憶される。次いで、取り込んだ画像信号に対して、S13で設定された入カデータの範囲に対応する範囲を、このショット領域(サンプルショットSA2)に係る入カデータの範囲として設定するとともに、S17で決定された候補パターンに対応する領域を比較パターンとして抽出する(S23)。次いで、残余のサンプルショットSA3〜SA9について、同様に順次S21〜S23を実施して、各サンプルショットについての8個の比較パターンを抽出する(S24)。
【0026】
次いで、S17で決定された候補パターンの基準パターンとしての適性を判断する(S25)。この判断では、候補パターンを比較パターンと比較して、その一致度(又は相違度)を求めて、一致度が高い場合には該候補パターンが基準パターンとして適正であり、一致度が低い場合には該候補パターンが基準パターンとして不適正であると判断する。具体的には、以下の通りである。まず、サンプルショットSA1における候補パターンに係る画像信号をf1とし、サンプルショットSA2〜SA9における比較パターンに係る画像信号をf2〜f9として、下記の式(3)に示すように、一致度Lを算出し、予め設定されたしきい値SH1と比較して、一致度Lが該しきい値SH1以上である場合には適性なしと、一致度Lが該しきい値SH1未満である場合は適性ありと判断する。また、サンプルショットの数をnとして、下記の式(4)に示すように、ばらつきMを算出し、予め設定されたしきい値SH2と比較して、ばらつきMがしきい値SH2以上である場合には適性なしと、ばらつきMがしきい値SH2未満である場合は適性ありと判断するようにしてもよい。
【数2】
【0027】
S26で適性ありと判断された場合(Yの場合)には、S27において、当該候補パターンを基準パターンとして決定し、該候補パターンに係る画像信号に基づいてテンプレートを作成し、テンプレートデータ記憶部36にその領域の位置情報とともに格納して一連の処理を終了する。S26で適性なしと判断された場合(Nの場合)には、S27を実行することなく、一連の処理を終了する。なお、適性なしと判断された場合には、図4のS17に戻って、当該候補パターンに係る仮のテンプレートは除外した上で、次に適切な仮のテンプレートを候補パターンとして決定して、S21〜S27の一例の処理を行って、その適性を判断する。以下、順次同様に処理する。これらの処理を数回行っても基準パターンとして適性のある候補パターンが見つからなかった場合には、候補パターンを抽出するサンプルショットを変更し、あるいは他のウエハWに交換して、図4及び図5の処理を行う。
【0028】
基準パターンの候補としての候補パターンの抽出処理(S11〜S17)において、候補パターンの抽出の対象領域に、例えば埃や塵(傷、その他の障害)等があると、このような埃等はランダムに不着(発生)するので、当該埃等が不着した部分は他の部分に対してユニークとなる可能性が高く、その部分が候補パターンとして抽出される確率が高い。言うまでもなく、埃等の不着によりユニークと判断された候補パターンは、当然に基準パターンとしては不適切であり、即ち、そのような候補パターンを基準パターンとしたテンプレートを用いて、位置検出を行った場合には、検出対象のショット領域には同様に塵等が不着する確率は極めて低い(殆ど皆無である)ので、対象となる基準パターンが存在しないために計測エラーとなったり、あるいは計測誤差が極めて大きくなってしまうという問題が生じる。
【0029】
本実施形態では、所定の領域内でユニークであると判断された候補パターンについて、候補パターンの基準パターンとしての適性を、候補パターンの抽出に係るショット領域とは異なる複数のショット領域で、該候補パターンに対応する比較パターンを抽出し、これらとの比較においてその適性を判断する適性判断処理(S21〜S27)を行って、基準パターンとして採用するか否かを決定するようにしている。比較パターンには、候補パターンと同様に埃等が不着する可能性は少ない(殆ど無い)ので、両者の比較により、候補パターンの基準パターンとしての適性、即ち、候補パターンに埃等の不着の有無を、高い確率で判断することができる。
【0030】
なお、比較パターンを1つだけ抽出して判断しても、ある程度の効果は期待することはでき、それで十分な場合もある。この場合には、候補パターンと比較パターンの差分の絶対値を予め設定したしきい値と比較して判断すればよい。但し、候補パターンには埃等の不着が無くて、比較パターンに埃等が不着している場合にも、候補パターンの適性を否定してしまう場合がある。従って、本実施形態のように、候補パターンの抽出に係るショット領域と異なる複数のショット領域から比較パターンを抽出して、これを上述したように統計処理することによって、比較パターン側に埃等の不着があっても、より確実に候補パターンの基準パターンとしての適性を判断することができる。
【0031】
また、上記説明では、候補パターンの抽出はサンプルショットSA1で行い、その基準パターンとしての適性の判断を、他のサンプルショットSA2〜SA9から抽出した比較パターンにより行うようにしたが、候補パターンの抽出は、他のサンプルショット又はサンプルショット以外のショットで行ってもよく、比較パターンの抽出もサンプルショット以外のショットで行ってもよく、比較パターンの抽出を行うサンプルショットの数も1つ以上であれば、いくつでもよい。
【0032】
さらに、前述した方法においては、式(1)又は式(2)に基づいて相関値を求めたが、SSDA法(残差逐次検定法:Sequential Similarity Detection Algorithms) 等を適用してもよい。
【0033】
また、前述した方法においては、テンプレートのサイズを予め所定のサイズとして、このサイズで仮のテンプレートを設定したり、あるいは相関値サーチを行ったりしていた。しかし、このサイズは可変であってもよい。即ち、サイズの範囲、あるいはサイズの種類を予め決めておき、その範囲内でテンプレートのサイズを順次変更する。そして、その各サイズについて入カデータ範囲内を走査して前述した方法により順次仮のテンプレートを検出し、最終的に最もユニークなパターンを候補パターンとするようにする。このような方法によれば、テンプレートサイズを自動的に決定することができ、また、テンプレートサイズをも考慮した適切なテンプレートを検出することができる。
【0034】
次に、本発明に係る露光装置の動作について、図10を参照して説明する。まず、レチクルR及びウエハWを、各々レチクルステージ3及びウエハステージ7上に搬送し、各ステージ上に載置し支持する。この際、ウエハWは、ウエハに形成されたオリエンテーション・フラット又はノッチ等を用いて、ウエハステージ7に対して位置合わせ(プリアライメント処理)をした後、ウエハホルダ6を介してウエハステージ7上に保持される(S310)。アライメントセンサ12としては、上述した説明では、単一のアライメントセンサが設けられているように説明したが、ウエハW上のショット配列を正確に計測する、比較的に高倍率に設定されたファインアライメント用のファインアライメントセンサと、ファインアライメントに先立ち、その計測視野内にマーク(又は基準パターン)が正確に位置するようにするため比較的に低倍率に設定されたサーチアライメント用のサーチアライメントセンサの2つが設けられる場合があり、ここでは、こられ2つのアライメントセンサが設けられているものとし、サーチアライメントでは、上述した基準パターンを用いて計測を行い、その後のファインアライメントでは、アライメントマークAMを用いて計測を行うものとして説明する。但し、ファインアライメントにおいて、上述した基準パターンを用いて計測を行うようにしても勿論よい。また、アライメントセンサ12としては単一のものとし、倍率変更機構を設けて、サーチアライメント時には低倍率に、ファインアライメント時には高倍率に設定して計測するようにしてもよい。
【0035】
サーチアライメント(S320)においては、ウエハW上の離れた複数箇所において基準パターンを検出し、その各基準パターンの位置関係に基づいてウエハの回転量やXYずれ等を求める。サーチアライメントでは、まず、基準パターンの設計上の位置情報に基づいて、ウエハW上のその基準パターンを含む撮像視野(有効視野)内の画像信号を取り込む(S321)。具体的には、主制御系10が、駆動系11を介して、基準パターンがアライメントセンサ12の視野領域内に入るようにウエハステージ7を駆動する。
【0036】
移動処理が完了すると、サーチアライメントセンサ12の照明光がウエハW上に照明される。即ち、ハロゲンランプ13から出射された照明光は、照明系14,15,19,20を介してウエハWを落射照明する。ウエハWからの反射光は、結像系20,19,15,22,23,24,25を介して撮像素子26の受光面に入射し、ウエハWの対応する像が結像される。このとき、指標マーク23の像も撮像素子26に結像される。撮像素子26に結像した像は、視野領域内の画像として、FIA演算ユニット27の画像信号記憶部33に記憶される。
【0037】
次に、FIA演算ユニット27のFIA制御部34は、テンプレートデータ記憶部36に記憶されているテンプレート(図4及び図5の処理により格納されたテンプレート)と同じサイズの窓により画像信号記憶部33に記憶されている画像信号を走査し、テンプレートデータとの照合(マッチング)を行う(S322)。具体的には、走査され所定の位置に設定された窓内の画像とテンプレートデータとの相関の評価値を前述した式(1)又は式(2)により求める。そして、評価値が所定のしきい値よりも大きい場合に、そのテンプレートの基準パターンがその位置に存在すると判断し、その基準パターンの位置情報を取得する。サーチアライメントのために予め設定されたウエハW上の所定の数ヶ所の領域に対して、これら画像の取り込み(S321)及びマッチング(S322)の処理を各々行う(S323)。そして、数ヶ所の領域の基準パターンの位置の検出が全て終了したら、その各基準パターンの位置関係に基づいて所定の演算を行い、ウエハWの回転量やXYずれ等を求める(S324)。
【0038】
サーチアライメントが終了したら、次に、ファインアライメントセンサ12により、ウエハW上の各ショットの位置ずれを検出するファインアライメントを行う(S330)。ここでは、ウエハW上のサンプルショットSA1〜SA9に付随して形成されたアライメントマークAMを検出し、そのアライメントマークAMの位置を求める。以上の計測が終了すると、主制御系10はアライメントマークAMの計測結果と、ウエハW上に設定されたショット領域の設計上の位置情報とに基づいてEGA(エンハンスト・グローバル・アライメント)演算を行い、ウエハW上に設定された全てのショット領域の配列の規則性を統計的な手法で決定する(S340)。
【0039】
以上の処理が終了すると、主制御系10はEGA演算により求められた配列情報に対してベースライン量(アライメントセンサ12の中心と投影光学系PLの光軸との間の距離)を加算して補正を行う。そして、主制御系12はステージ駆動系11を介してベースライン補正されたウエハWのX座標及びY座標に基づいて、各ショット領域の中心と投影光学系PLの光軸AXとが一致するようにウエハステージ7を駆動させる。これにより、ウエハWの各ショット領域の正確な露光領域への合わせ込み、即ちウエハWの正確な位置決めが行われる(S350)。次いで、この状態で照明光学系1からの露光光ELをレチクルRに照射し、レチクルRに形成されたパターンの像を投影光学系PLを介して露光領域に配置されたショット領域へ転写する(S360)。次いで、ウエハW上の全てのショット領域への露光処理が終了したか否かを判断し(S370)、終了していないと判断された場合(Nの場合)には、S350に戻ってウエハステージ7の位置決めを順次行いつつ、露光処理を順次行い、S370で全てのショット領域について露光処理が終了したと判断された場合(Yの場合)には、一連の処理を終了する。
【0040】
なお、本実施の形態においては、サーチアライメントの際の基準パターンを用いて位置計測を行う場合のテンプレートマッチングにおいて使用するテンプレートを作成する方法を例示したが、ファインアライメントの際に基準パターンを用いて位置計測を行う場合にも、同様に作成可能である。
【0041】
本実施形態によれば、埃等の不着の可能性が極めて少ない基準パターンを用いて、基準パターンの位置計測用のテンプレートを生成するようにしたので、ウエハWの位置計測(又はショット配列の計測)をより正確に行うことができるようになり、ウエハW(ショット領域)の位置決め精度を向上することができる。従って、露光精度(パターンの重ね合わせ精度)を向上でき、ひいては、高品質、高密度、高精度、高信頼なマイクロデバイス等を製造することができるようになる。
【0042】
以上説明した実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。例えば、本発明は、ステップ・アンド・スキャン方式の露光装置以外にステップ・アンド・リピート方式の露光装置、ステップ・アンド・スティッチ方式等の露光装置に適用することが可能である。また、半導体素子、液晶表示素子の製造に用いられる露光装置だけでなく、プラズマディスプレイ、薄膜磁気ヘッド、及び撮像素子(CCDなど)の製造にも用いられる露光装置、並びにレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも本発明を適用できる。さらに、投影光学系と基板との間に純水等の液体を満たした状態で露光する液浸方式の露光装置にも適用可能である。即ち、本発明は、露光装置の露光方式や用途等に関係なく適用可能である。なお、本発明は露光装置に用いられる場合に限られず、撮像した画像から基準パターン(テンプレートパターン)を抽出して、テンプレートマッチングを行う装置、方法であれば、適用可能である。
【0043】
なお、前述した本発明の実施形態に係る露光装置(図1)は、照明光学系1、レチクルステージ3、ベース4、及び駆動装置5を含むレチクルアライメント系、ウエハホルダ6、ウエハステージ7、移動鏡8、及びレーザ干渉計9を含むウエハアライメント系、投影光学系PL等の図1に示された各構成要素が電気的、機械的、又は光学的に連結して組み上げられた後、総合調整(電気調整、動作確認等)をすることにより製造される。なお、露光装置の製造は、温度及びクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0044】
本発明の実施形態に係る露光装置を使用したデバイスの製造は、まず、設計ステップにおいて、デバイスの機能設計(例えば、半導体デバイスの回路設計等)を行い、その機能を実現するためのパターン設計を行う。引き続き、マスク製作ステップにおいて、設計した回路パターンを形成したマスクを製作する。一方、ウエハ製造ステップにおいて、シリコン等の材料を用いてウエハを製造する。次に、ウエハプロセスステップにおいて、上記ステップで用意したマスクとウエハを使用して、リソグラフィ技術によってウエハ上に実際の回路等を形成する。次いで、組立ステップにおいて、処理されたウエハを用いてチップ化する。この組立ステップには、アッセンブリ工程(ダイシング、ボンディング)、パッケージング工程(チップ封入)等の工程が含まれる。最後に、検査ステップにおいて、作製されたデバイスの動作確認テスト、耐久性テスト等の検査を行う。こうした工程を経た後にデバイスが完成し、これが出荷される。
【図面の簡単な説明】
【0045】
【図1】本発明の実施形態に係る露光装置の全体構成を示す図である。
【図2】本発明の実施形態に係るウエハの上面図である
【図3】本発明の実施形態に係るFIA演算ユニットの概略構成を示すブロック図である。
【図4】本発明の実施形態に係る候補パターンの抽出処理を示すフローチャートである。
【図5】本発明の実施形態に係る候補パターンの適性判断処理を示すフローチャートである。
【図6】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その1)である。
【図7】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その2)である。
【図8】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その3)である。
【図9】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その4)である。
【図10】本発明の実施形態に係る露光処理の全体の流れを示すフローチャートである。
【符号の説明】
【0046】
1…照明光学系、R…レチクル、EL…露光光、PL…投影光学系、W…ウエハ、7…ウエハステージ、10…主制御系、12…アライメントセンサ、26…撮像素子、27…FIA演算ユニット、33…画像信号記憶部、34…FIA制御部、36…テンプレートデータ記憶部、37…位置演算部、AreaI…入カデータ範囲、AreaT…仮のテンプレート、AreaS…窓。
【技術分野】
【0001】
本発明は、被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法、及び該方法を用いて抽出された基準パターンを用いて物体を位置決めする位置決め方法及び装置、並びに該位置決め装置を備える露光装置に関する。
【背景技術】
【0002】
半導体素子や液晶表示素子等のデバイスを製造する露光装置は、パターンが形成されたマスク又はレチクルと、ウエハやガラスプレート等の基板(物体)上に既に形成されているパターンとを高精度に位置合わせした状態で、マスクのパターンを基板上に転写する必要があるため、位置合わせ用のマーク(アライメントマーク)の位置を検出するアライメントセンサを備えている。このアライメントセンサとしては、ハロゲンランプ等の波長帯域幅の広い光源を用いてマークを照明しマークの像をCCD(Charge Coupled Device)等の撮像装置で撮像して得られる画像情報(画素情報)を画像処理して位置計測を行うFIA(Field Image Alignment)方式のものなどが用いられている。
【0003】
ところで、半導体素子や液晶表示素子等のデバイスの製造においては、レチクルに形成されたパターンの像を基板上に投影露光することが繰り返し行われる。このため、製造プロセスを経るにつれ基板上に形成されたマークが劣化してしまい、その位置情報を高い精度で検知することが困難になる場合がある。これの対策として、マークを計測する代わりに、あるいはそのようなマークの計測を前提とせずに、基板上のある領域でユニークな信号特徴を有する特徴部分を抽出して、これを基準パターンとしてテンプレートを生成し、このテンプレートを用いて、当該特徴部分をマークの代用として計測する技術が開発されている(例えば、特許文献1参照)。この特許文献1には、基板上に形成されるべきパターンの設計データから、当該特徴部分を抽出して、この設計データからテンプレートを作成するもの、あるいは同様に設計データから抽出された特徴部分を含む領域を撮像して、該特徴部分に対応する計測データを用いてテンプレートを作成するもの等が開示されている。また、このような設計データから特徴部分を抽出するのではなく、基板を実際に計測した計測データから特徴部分の抽出及びテンプレートの作成を行うことも可能である。
【0004】
特徴部分の抽出は、ある領域(例えば、計測用の撮像装置の撮像視野)内で、他に同一又は類似の部分がないように、該領域よりも小さい領域のユニークさが所定のアルゴリズムに従って行われるので、計測データから特徴部分の抽出を行う場合に、例えば、基板上に埃や塵等が不着していると、当該埃等は不特定な形状や不着の仕方をしているため、当該埃等を含む部分はユニークさが高い場合が多く、当該埃等を含む部分が特徴部分として抽出されることになる。
【0005】
しかしながら、そのような埃等が不着しているためにユニークであると判断された部分(基板上の特定位置あるいはショット内の特定位置)は、他の基板に全く同じ位置関係で、あるいは同じ基板上の異なるショット内においてショット基準でみて全く同じ位置関係で埃等が不着する可能性は極めて低いので、その部分がマークの代用としての機能を果たすことはできず、仮にそれを用いたとすれば、計測エラーあるいは誤差の大きい検出結果となってしまうことになる。従って、基準パターンの抽出は、そのような埃等の不着の無い部分から行う必要がある。
【0006】
本発明はこのような点に鑑みてなされたものであり、埃等の不着の無い部分から基準パターンの抽出を行えるようにして、計測精度の向上を図り、基板の位置決め精度の向上、露光精度の向上、ひいては高品質、高性能、高信頼なデバイス等を製造できるようにすることを目的とする。
【特許文献1】国際公開WO2005/001593号パンフレット
【発明の開示】
【課題を解決するための手段】
【0007】
本発明によると、実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法であって、前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の信号情報を計測する第1工程と、前記第1工程で計測された信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出する第2工程と、前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を計測する第3工程と、前記第3工程で計測された信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出する第4工程と、前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する第5工程と、を備える基準パターン抽出方法が提供される。
【0008】
本発明では、第1所定領域内で計測された信号情報に基づいて抽出された候補パターンの基準パターンとしての適性を、該第1所定領域とは異なる第2所定領域内で計測された信号情報に基づいて抽出された、該候補パターンに対応する比較パターンに基づいて判断するようにしている。第1所定領域と第2所定領域には、実質的に同一の加工(例えば、露光処理)が施されているので、候補パターンの抽出の際に例えば埃や塵等が不着しているためにユニークであると判断されて抽出された第1所定領域内の候補パターンは、第2所定領域内のこれに対応する比較パターンにも同じ傾向で埃等が不着している可能性は低いため、その相違性が高くなることになり、この逆に、候補パターンと比較パターンの一致性が高ければ、候補パターンに埃等が不着している可能性は低いことになる。従って、候補パターンを比較パターンに基づいてその適性を判断することにより、埃等の不着のない信頼性の高い基準パターンを抽出することが可能となる。
【発明の効果】
【0009】
本発明によると、埃等の不着の無い部分から基準パターンの抽出を行えるようにしたので、計測精度を向上することができ、例えば露光処理に適用した場合には、物体の位置決め精度の向上、露光精度の向上、ひいては高品質、高性能、高信頼なデバイス等を製造できるようになるという効果がある。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照して本発明の実施形態を詳細に説明する。図1は、本発明の実施形態に係る露光装置の全体構成を示す図である。本実施形態においては、オフアクシス方式のアライメントセンサを備えたステップ・アンド・スキャン方式の露光装置を例に挙げて説明する。なお、以下の説明においては、図1中に示されたXYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部材の位置関係について説明する。
【0011】
図1において、照明光学系1から射出された露光光ELは、ほぼ均一な照度でレチクルRを照明する。レチクルRはレチクルステージ3上に保持され、レチクルステージ3はベース4上の2次元平面内で移動及び微小回転ができるように支持されている。装置全体の動作を制御する主制御系10が、ベース4上の駆動装置5を介してレチクルステージ3の動作を制御する。なお、照明光学系1が射出する露光光ELとしては、g線(波長436nm)、i線(波長365nm)、KrFエキシマレーザ光(波長248nm)、ArFエキシマレーザ光(波長193nm)、F2レーザ光(波長157nm)、X線や電子線などの荷電粒子線等が用いられる。
【0012】
露光光ELのもとで、レチクルRのパターン像が投影光学系PLを介してウエハW上のショット領域に投影される。ここで、ウエハWについて図2を参照して概説する。ウエハW上には複数のショット領域ES1〜ESMが規則的に形成されている。各ショット領域ESiにはそれまでの工程を経て同一の製造プロセス(露光処理や現像処理等を含む加工処理)が施されることによりそれぞれチップパターンが形成されている。また、各ショット領域ESiはX方向及びY方向に伸びる所定幅のストリートライン(スクライブライン)で区切られており、各ショット領域ESiに接するストリートライン上にアライメントマークMxi,Myiが形成されている。これらのアライメントマークMxi,Myiは、例えば、同図に示すように、それぞれX方向及びY方向に所定ピッチで3本の直線パターンを並べたものであり、ウエハWの下地に凹部又は凸部のパターンとして形成されている。また、ウエハW上に設定された複数のショット領域ES1〜ESMの内、予め所定数のショット領域がサンプルショット(サンプル領域)として選択されている。図2では、斜線を付した9個のショット領域がサンプルショットSA1〜SA9として選択されている。ここでは、アライメントマークの計測は、これらのサンプルショットSA1〜SA9に付随したマークMxi,Myiについて行われるものとする。なお、ウエハWに形成されるマークの形状は、このような1次元マークに限られず、二次元計測用のマーク、その他の構成のマークでもよい。
【0013】
また、本実施形態の露光装置は、後述するように、ショット領域ES1〜ESM内に任意に設定される該ショット領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有するパターン(基準パターン又はテンプレートパターン)をアライメントマークの代わりとして計測して、位置決め等を行う機能を備えている。この機能は、アライメントマークが製造プロセスを経るにつれて劣化してしまい、その位置情報を高い精度で検知することができない場合やアライメントマークを全く形成しない場合にも、ショット領域の配列を正確に求めて、位置決めするための機能である。この機能の詳細は、後に詳述する。
【0014】
図1に戻り、ウエハWはウエハホルダ6を介してウエハステージ7上に載置されている。ウエハステージ7は、投影光学系PLの光軸AXに垂直な面内でウエハWを2次元的に位置決めするXYステージ、投影光学系PLの光軸AXに平行な方向(Z方向)にウエハWを位置決めするZステージ、及びウエハWを微小回転させるステージ等より構成されている。ウエハステージ7の位置及び回転角は、ウエハステージ7に固定された移動鏡8にレーザ光を照射して相対位置変化を計測するレーザ干渉計9により計測される。レーザ干渉計9により計測されたX座標、Y座標、及び回転角の情報は主制御系10に供給され、主制御系10は、供給された座標をモニターしつつ駆動系11を介して、ウエハステージ7の位置決め動作を制御する。なお、図1には示していないが、レチクル側にもウエハ側と同様の干渉計システムが設けられている。
【0015】
また、投影光学系PLの側面にはオフ・アクシスのアライメントセンサ12が配置されている。ブロードバンド光を発生するハロゲンランプ等の光源13からの照明光がコリメータレンズ14によって平行光に変換され、ハーフミラー15で反射された後、照明光ILはミラー19で反射され、対物レンズ20で集光されて、ウエハW上のマークAM又は基準パターンを含む領域を落射照明する。マークAM又は基準パターンを含む領域からの反射光は、対物レンズ20を介してミラー19によって反射された後、ハーフミラー15を透過してレンズ系22によって指標板23上に結像される。この指標板23には、マークAM又は基準パターンの位置情報を計測する際の基準となる指標マークが形成されている。指標板23は対物レンズ20とレンズ系22とによってウエハWと共役に配置される。ウエハWのマークAM又は基準パターンの像と指標マークとは、リレー系24,25を介して撮像素子26の撮像面に結像する。撮像素子26としては、例えば二次元CCD(Charge Coupled Device)が用いられる。撮像素子26は、同図では1つ示したが、X方向計測用の撮像素子とY方向計測用の撮像素子の2つが設けられる場合がある。
【0016】
撮像素子26は撮像面に結像した光学像を電気信号に変換する。撮像素子26の撮像面には入射した光を受光して電気信号に変換する受光素子が配列されている。撮像素子26は配列された受光素子を順次走査することにより撮像面に入射する像を画像信号に変換する。撮像素子26から出力される画像信号はFIA演算ユニット27へ出力される。FIA演算ユニット27は撮像素子26から出力される画像信号に対して種々の信号処理を施してマークAM又は基準パターンの位置情報を演算により求める。FIA演算ユニット27は、図3に示すように、プリアンプ30、増幅器31、A/D(アナログ・ディジタル)変換器32、画像信号記憶部(メモリ)33、FIA制御部34、AGC(Automatic Gain Control:自動利得制御)回路35、テンプレートデータ記憶部(メモリ)36、及び位置演算部37を備えている。プリアンプ30は、撮像素子26から出力される画像信号を予め設定された固定の増幅率で増幅する。このプリアンプ30は、画像信号を直接高い増幅率で増幅した場合に生ずるノイズの発生を低減するために設けられる。増幅器31は、AGC回路35によってその増幅率が制御され、プリアンプ30から出力される画像信号をA/D変換器32による信号処理に最適な電圧範囲の画像信号に増幅する。A/D変換器32は、増幅器31によって増幅された画像信号に対してA/D変換処理を施してディジタル信号に変換する。画像信号記憶部33は、ディジタル化された画像信号(ここでは、2次元信号)を記憶する。
【0017】
FIA制御部34は、主制御系10による制御の下、このFIA演算ユニット27を全体的に制御する。テンプレートデータ記憶部36には、マーク計測の際に位置演算部37により行われるテンプレートマッチング処理で用いられるテンプレートデータが予め記憶されている。位置演算部37は、テンプレートデータ記憶部36に格納されたテンプレートデータを用いて、画像信号記憶部33に記憶されている画像信号に対してテンプレートマッチング処理を含む演算処理を行って、マークAM又は基準パターンの位置情報(マークAM又は基準パターンの中心と指標マークの中心とのX及びY方向におけるずれ量)を求め、主制御系10へ出力する。なお、テンプレートデータ記憶部36には、ウエハW上のアライメントマークAMを計測する場合には該マークAMに対応するテンプレートデータが、基準パターンを計測する場合には該基準パターンに対応するテンプレートデータが記憶されている。また、FIA制御部34は、詳細は後述するが、画像信号記憶部33に格納された画像情報に基づいて、ショット領域内の回路や配線の一部であってユニークなパターンである基準パターンの抽出及びテンプレートを生成してテンプレートデータとしてテンプレートデータ記憶部36に格納する処理(基準パターンの抽出及びテンプレート生成処理)をも行う。
【0018】
テンプレートマッチング処理では、画像信号記憶部33の2次元の画像信号を計測方向に直交する非計測方向に積算して、計測方向に関する1次元信号を算出し、計測方向に対応したテンプレートとマッチングする(相関性の高い)位置を求めて、マークAM又は基準パターンの当該計測方向における中心位置を求める。なお、テンプレートマッチング処理は、ここでは画像信号を1次元信号に変換したものについて行うものとしたが、2次元信号のまま行うようにしてもよいし、積算の方向や方法もこれと異なっていてもよい。また、アライメントマークAMを計測する際には、上述したテンプレートマッチング法以外に、左右が対称となる折り返し点を算出して中心位置とする折り返し自己相関法、あるいはアライメントマークAMのエッジ位置を求めるエッジ位置検出法として、スライス法、最大傾斜法等を用いてもよい。スライス法は当該1次元信号の信号強度が最大値と最小値に対して一定の割合になる位置をエッジ位置と見なすものであり、最大傾斜法は当該1次元信号の微分値の絶対値が最大となる位置をエッジ位置とするものである。なお、ここでは、アライメントマークAM又は基準パターンの中心を求めるものとするが、該マーク又AMは該基準パターンを代表する点であればよく、必ずしも中心である必要はない。位置演算部37による演算結果(アライメントマークAM又は基準パターンと指標パターンとのずれ量)は主制御系10に送られ、主制御系10は送られた演算結果とレーザ干渉計9からのウエハステージ7の位置情報とに基づいて、該アライメントマークAM又は該基準パターンの位置を算出する。
【0019】
次に、基準パターンの抽出及びテンプレートデータの生成処理について、図4及び図5に示すフローチャートを参照して説明する。この処理は、主としてFIA演算ユニット27のFIA制御部34によって行われる処理であり、ウエハW上のアライメントマークAMがプロセスを経るにつれて劣化した場合、アライメントマークAMが形成されていない場合、その他必要に応じて行われる処理である。この基準パターンの抽出及びテンプレートデータの生成処理の対象となるウエハWは、例えば、複数のウエハWに対して同一のプロセス処理が行われる単位であるロットの先頭のウエハ、あるいは同一のプロセス処理が行われる複数のロットがある場合には当該複数のロットの先頭のウエハWについて行われる。但し、必要に応じて、ロットの途中で行っても、あるいはロット処理とは別にロット先頭又はロット中のウエハWを用いて事前に行っても勿論よい。
【0020】
まず、当該ウエハWをウエハステージ7のウエハホルダ6上にローディングし、ウエハW上の撮像すべき箇所をアライメントセンサ12に対して位置決めし(S11)、画像信号を取り込む(S12)。具体的には、該ウエハW上の予め決められた所定のショット領域(ここでは、図2のサンプルショットSA1とする)内の予め決められた所定の領域を被計測領域として、該被計測領域がアライメントセンサ12の計測視野内に含まれるように、ウエハステージ7を位置決めし、画像信号を取り込む。この画像信号は、上述したようにFIA演算ユニット27の画像信号記憶部33に記憶される。次いで、取り込んだ画像信号に対して、被計測領域としての入カデータの範囲を設定する(S13)。ウエハWの投入動作に起因する誤差やパターンの製造処理に起因する誤差等により、撮像される範囲は所定の範囲内でばらつく。そのようなばらつきがあっても、必ず撮像範囲に含まれる領域を、入カデータの範囲として設定するのが好ましい。撮像された画像信号中に必ず基準パターンが含まれる必要があるからである。但し、入カデータ範囲は、これに限られず任意に設定してよい。本実施形態においては、撮像視野(有効視野)内の2次元の画像信号上に、例えば図6に示すような領域(入力データ範囲)AreaIを設定する。
【0021】
入カデータ範囲を設定したら、その範囲内に、予め定められているテンプレートの大きさと同じサイズの領域を設定し、仮のテンプレートとする(ステップS14)。図6に示す例においては、テンプレートと同じサイズの領域AreaT(xi,yi)が入カデータ範囲AreaI内に設定される。なお、(xi,yi)は、領域AreaTの基準点の座標値(図6の例では、領域AreaTの左上角点の座標値)である。次に、入カデータ範囲の全域について、仮のテンプレートとの相関サーチ計算を行い、相関値が所定のしきい値を越え、なおかつピークとなる位置を検出する(ステップS15)。即ち、図7に示すように、入カデータ範囲AreaIをテンプレート(仮のテンプレートAreaT)と同じサイズの窓で走査し、各位置における窓内の領域AreaS(xj、yj)の画像信号と仮のテンプレートAreaT(xi,yi)の画像信号との相関値を順次求める。そして、相関値が十分に高く、ピークとなっている領域を検出する。この時、相関サーチ計算は、下記の式(1)又は式(2)に基づいて行う。なお、式(1)及び式(2)のいずれの式を用いるかは、場合によって使い分ける。
【数1】
【0022】
このような仮のテンプレートの設定(S14)及び相関値ピークの検出(S15)を、入カデータ範囲AreaI内に設定し得る全ての領域(テンプレートと同じサイズの領域)に対して行い、各領域に対する相関値ピークを示す領域を検出する(S16)。同一の仮のテンプレートに対して相関値ピークを示す領域は、各々同一の画像信号、即ち同一のパターンにより構成された領域と見ることができる。従って、相関値ピークを示す領域の検出により、同一のパターンにより構成される領域が各パターンごとに検出される。例えば、図8に示すように、領域AreaI中に、パターンAで構成される領域が5ヶ所、パターンBで構成される領域が2ヶ所、パターンCで構成される領域が1ヶ所存在することが検出される。
【0023】
このように入カデータ範囲AreaI内に存在するパターンの構成が検出されたら、その中から、基準パターンの候補としての候補パターンを抽出・決定する(S17)。具体的には、まず、入カデータ範囲AreaI内に存在するパターンの中から、自分自身以外にピークを持たず単一的に(ユニークに)存在するパターンを検出し、即ち、自分自身以外にピークを持たないユニークな領域AreaT(xi,yi)(=AreaS(xj,yj))を検出し、これを候補パターンとする。例えば、図8に示す例においては、1ヶ所にのみ存在するパターンC(パターンCで表す領域AreaT(xi,yi)の画像信号)を、候補パターンして決定する。
【0024】
ところで、自分自身以外にピークを持たない仮のテンプレートAreaT(xi,yi)が複数検出された場合には、最も相関値が高いもの(相関値ピークとして検出された自分自身)と2番目に高いもの(相関値ピークとして検出されなかった領域の中で最も相関値の高いもの)との相関値の差(特徴値の差)が、最も大きい仮のテンプレートAreaT(xi,yi)に係るパターンを候補パターンとして決定する。この相関値の差がSN比に相当することになるので、差が大きいほど安定したテンプレートを生成することができるからである。このことについて、図9を用いて具体的に説明する。例えば、図9に示すように、領域AreaI中に、パターンA、B,Cに加えて、パターンCと形状が似ているパターンOが存在していたとする。このような場合、入カデータ範囲AreaI内には、パターンBとパターンCという2つのユニークなパターンが存在する。しかし、パターンCには、これに形状が類似しているパターンOが存在するため、パターンCを仮のテンプレートとした時のパターンCとパターンOに対する相関値の差は小さくなる。従って、図9のような場合には、パターンBを候補パターンとして選択する。
【0025】
候補パターンが決定したならば、該候補パターンの基準パターンとしての適性を判断するため、図5に示す適性判断処理を行う。まず、S12で画像信号を取り込んだショット領域(ここでは、図2のサンプルショットSA1)とは異なるショット領域であって予め決められた所定のショット領域(ここでは、図2のサンプルショットSA2とする)内の予め決められた所定の領域を被計測領域として、該被計測領域がアライメントセンサ12の計測視野内に含まれるように、ウエハステージ7を位置決めし(S21)、画像信号を取り込む(S22)。この画像信号は、FIA演算ユニット27の画像信号記憶部33に記憶される。次いで、取り込んだ画像信号に対して、S13で設定された入カデータの範囲に対応する範囲を、このショット領域(サンプルショットSA2)に係る入カデータの範囲として設定するとともに、S17で決定された候補パターンに対応する領域を比較パターンとして抽出する(S23)。次いで、残余のサンプルショットSA3〜SA9について、同様に順次S21〜S23を実施して、各サンプルショットについての8個の比較パターンを抽出する(S24)。
【0026】
次いで、S17で決定された候補パターンの基準パターンとしての適性を判断する(S25)。この判断では、候補パターンを比較パターンと比較して、その一致度(又は相違度)を求めて、一致度が高い場合には該候補パターンが基準パターンとして適正であり、一致度が低い場合には該候補パターンが基準パターンとして不適正であると判断する。具体的には、以下の通りである。まず、サンプルショットSA1における候補パターンに係る画像信号をf1とし、サンプルショットSA2〜SA9における比較パターンに係る画像信号をf2〜f9として、下記の式(3)に示すように、一致度Lを算出し、予め設定されたしきい値SH1と比較して、一致度Lが該しきい値SH1以上である場合には適性なしと、一致度Lが該しきい値SH1未満である場合は適性ありと判断する。また、サンプルショットの数をnとして、下記の式(4)に示すように、ばらつきMを算出し、予め設定されたしきい値SH2と比較して、ばらつきMがしきい値SH2以上である場合には適性なしと、ばらつきMがしきい値SH2未満である場合は適性ありと判断するようにしてもよい。
【数2】
【0027】
S26で適性ありと判断された場合(Yの場合)には、S27において、当該候補パターンを基準パターンとして決定し、該候補パターンに係る画像信号に基づいてテンプレートを作成し、テンプレートデータ記憶部36にその領域の位置情報とともに格納して一連の処理を終了する。S26で適性なしと判断された場合(Nの場合)には、S27を実行することなく、一連の処理を終了する。なお、適性なしと判断された場合には、図4のS17に戻って、当該候補パターンに係る仮のテンプレートは除外した上で、次に適切な仮のテンプレートを候補パターンとして決定して、S21〜S27の一例の処理を行って、その適性を判断する。以下、順次同様に処理する。これらの処理を数回行っても基準パターンとして適性のある候補パターンが見つからなかった場合には、候補パターンを抽出するサンプルショットを変更し、あるいは他のウエハWに交換して、図4及び図5の処理を行う。
【0028】
基準パターンの候補としての候補パターンの抽出処理(S11〜S17)において、候補パターンの抽出の対象領域に、例えば埃や塵(傷、その他の障害)等があると、このような埃等はランダムに不着(発生)するので、当該埃等が不着した部分は他の部分に対してユニークとなる可能性が高く、その部分が候補パターンとして抽出される確率が高い。言うまでもなく、埃等の不着によりユニークと判断された候補パターンは、当然に基準パターンとしては不適切であり、即ち、そのような候補パターンを基準パターンとしたテンプレートを用いて、位置検出を行った場合には、検出対象のショット領域には同様に塵等が不着する確率は極めて低い(殆ど皆無である)ので、対象となる基準パターンが存在しないために計測エラーとなったり、あるいは計測誤差が極めて大きくなってしまうという問題が生じる。
【0029】
本実施形態では、所定の領域内でユニークであると判断された候補パターンについて、候補パターンの基準パターンとしての適性を、候補パターンの抽出に係るショット領域とは異なる複数のショット領域で、該候補パターンに対応する比較パターンを抽出し、これらとの比較においてその適性を判断する適性判断処理(S21〜S27)を行って、基準パターンとして採用するか否かを決定するようにしている。比較パターンには、候補パターンと同様に埃等が不着する可能性は少ない(殆ど無い)ので、両者の比較により、候補パターンの基準パターンとしての適性、即ち、候補パターンに埃等の不着の有無を、高い確率で判断することができる。
【0030】
なお、比較パターンを1つだけ抽出して判断しても、ある程度の効果は期待することはでき、それで十分な場合もある。この場合には、候補パターンと比較パターンの差分の絶対値を予め設定したしきい値と比較して判断すればよい。但し、候補パターンには埃等の不着が無くて、比較パターンに埃等が不着している場合にも、候補パターンの適性を否定してしまう場合がある。従って、本実施形態のように、候補パターンの抽出に係るショット領域と異なる複数のショット領域から比較パターンを抽出して、これを上述したように統計処理することによって、比較パターン側に埃等の不着があっても、より確実に候補パターンの基準パターンとしての適性を判断することができる。
【0031】
また、上記説明では、候補パターンの抽出はサンプルショットSA1で行い、その基準パターンとしての適性の判断を、他のサンプルショットSA2〜SA9から抽出した比較パターンにより行うようにしたが、候補パターンの抽出は、他のサンプルショット又はサンプルショット以外のショットで行ってもよく、比較パターンの抽出もサンプルショット以外のショットで行ってもよく、比較パターンの抽出を行うサンプルショットの数も1つ以上であれば、いくつでもよい。
【0032】
さらに、前述した方法においては、式(1)又は式(2)に基づいて相関値を求めたが、SSDA法(残差逐次検定法:Sequential Similarity Detection Algorithms) 等を適用してもよい。
【0033】
また、前述した方法においては、テンプレートのサイズを予め所定のサイズとして、このサイズで仮のテンプレートを設定したり、あるいは相関値サーチを行ったりしていた。しかし、このサイズは可変であってもよい。即ち、サイズの範囲、あるいはサイズの種類を予め決めておき、その範囲内でテンプレートのサイズを順次変更する。そして、その各サイズについて入カデータ範囲内を走査して前述した方法により順次仮のテンプレートを検出し、最終的に最もユニークなパターンを候補パターンとするようにする。このような方法によれば、テンプレートサイズを自動的に決定することができ、また、テンプレートサイズをも考慮した適切なテンプレートを検出することができる。
【0034】
次に、本発明に係る露光装置の動作について、図10を参照して説明する。まず、レチクルR及びウエハWを、各々レチクルステージ3及びウエハステージ7上に搬送し、各ステージ上に載置し支持する。この際、ウエハWは、ウエハに形成されたオリエンテーション・フラット又はノッチ等を用いて、ウエハステージ7に対して位置合わせ(プリアライメント処理)をした後、ウエハホルダ6を介してウエハステージ7上に保持される(S310)。アライメントセンサ12としては、上述した説明では、単一のアライメントセンサが設けられているように説明したが、ウエハW上のショット配列を正確に計測する、比較的に高倍率に設定されたファインアライメント用のファインアライメントセンサと、ファインアライメントに先立ち、その計測視野内にマーク(又は基準パターン)が正確に位置するようにするため比較的に低倍率に設定されたサーチアライメント用のサーチアライメントセンサの2つが設けられる場合があり、ここでは、こられ2つのアライメントセンサが設けられているものとし、サーチアライメントでは、上述した基準パターンを用いて計測を行い、その後のファインアライメントでは、アライメントマークAMを用いて計測を行うものとして説明する。但し、ファインアライメントにおいて、上述した基準パターンを用いて計測を行うようにしても勿論よい。また、アライメントセンサ12としては単一のものとし、倍率変更機構を設けて、サーチアライメント時には低倍率に、ファインアライメント時には高倍率に設定して計測するようにしてもよい。
【0035】
サーチアライメント(S320)においては、ウエハW上の離れた複数箇所において基準パターンを検出し、その各基準パターンの位置関係に基づいてウエハの回転量やXYずれ等を求める。サーチアライメントでは、まず、基準パターンの設計上の位置情報に基づいて、ウエハW上のその基準パターンを含む撮像視野(有効視野)内の画像信号を取り込む(S321)。具体的には、主制御系10が、駆動系11を介して、基準パターンがアライメントセンサ12の視野領域内に入るようにウエハステージ7を駆動する。
【0036】
移動処理が完了すると、サーチアライメントセンサ12の照明光がウエハW上に照明される。即ち、ハロゲンランプ13から出射された照明光は、照明系14,15,19,20を介してウエハWを落射照明する。ウエハWからの反射光は、結像系20,19,15,22,23,24,25を介して撮像素子26の受光面に入射し、ウエハWの対応する像が結像される。このとき、指標マーク23の像も撮像素子26に結像される。撮像素子26に結像した像は、視野領域内の画像として、FIA演算ユニット27の画像信号記憶部33に記憶される。
【0037】
次に、FIA演算ユニット27のFIA制御部34は、テンプレートデータ記憶部36に記憶されているテンプレート(図4及び図5の処理により格納されたテンプレート)と同じサイズの窓により画像信号記憶部33に記憶されている画像信号を走査し、テンプレートデータとの照合(マッチング)を行う(S322)。具体的には、走査され所定の位置に設定された窓内の画像とテンプレートデータとの相関の評価値を前述した式(1)又は式(2)により求める。そして、評価値が所定のしきい値よりも大きい場合に、そのテンプレートの基準パターンがその位置に存在すると判断し、その基準パターンの位置情報を取得する。サーチアライメントのために予め設定されたウエハW上の所定の数ヶ所の領域に対して、これら画像の取り込み(S321)及びマッチング(S322)の処理を各々行う(S323)。そして、数ヶ所の領域の基準パターンの位置の検出が全て終了したら、その各基準パターンの位置関係に基づいて所定の演算を行い、ウエハWの回転量やXYずれ等を求める(S324)。
【0038】
サーチアライメントが終了したら、次に、ファインアライメントセンサ12により、ウエハW上の各ショットの位置ずれを検出するファインアライメントを行う(S330)。ここでは、ウエハW上のサンプルショットSA1〜SA9に付随して形成されたアライメントマークAMを検出し、そのアライメントマークAMの位置を求める。以上の計測が終了すると、主制御系10はアライメントマークAMの計測結果と、ウエハW上に設定されたショット領域の設計上の位置情報とに基づいてEGA(エンハンスト・グローバル・アライメント)演算を行い、ウエハW上に設定された全てのショット領域の配列の規則性を統計的な手法で決定する(S340)。
【0039】
以上の処理が終了すると、主制御系10はEGA演算により求められた配列情報に対してベースライン量(アライメントセンサ12の中心と投影光学系PLの光軸との間の距離)を加算して補正を行う。そして、主制御系12はステージ駆動系11を介してベースライン補正されたウエハWのX座標及びY座標に基づいて、各ショット領域の中心と投影光学系PLの光軸AXとが一致するようにウエハステージ7を駆動させる。これにより、ウエハWの各ショット領域の正確な露光領域への合わせ込み、即ちウエハWの正確な位置決めが行われる(S350)。次いで、この状態で照明光学系1からの露光光ELをレチクルRに照射し、レチクルRに形成されたパターンの像を投影光学系PLを介して露光領域に配置されたショット領域へ転写する(S360)。次いで、ウエハW上の全てのショット領域への露光処理が終了したか否かを判断し(S370)、終了していないと判断された場合(Nの場合)には、S350に戻ってウエハステージ7の位置決めを順次行いつつ、露光処理を順次行い、S370で全てのショット領域について露光処理が終了したと判断された場合(Yの場合)には、一連の処理を終了する。
【0040】
なお、本実施の形態においては、サーチアライメントの際の基準パターンを用いて位置計測を行う場合のテンプレートマッチングにおいて使用するテンプレートを作成する方法を例示したが、ファインアライメントの際に基準パターンを用いて位置計測を行う場合にも、同様に作成可能である。
【0041】
本実施形態によれば、埃等の不着の可能性が極めて少ない基準パターンを用いて、基準パターンの位置計測用のテンプレートを生成するようにしたので、ウエハWの位置計測(又はショット配列の計測)をより正確に行うことができるようになり、ウエハW(ショット領域)の位置決め精度を向上することができる。従って、露光精度(パターンの重ね合わせ精度)を向上でき、ひいては、高品質、高密度、高精度、高信頼なマイクロデバイス等を製造することができるようになる。
【0042】
以上説明した実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。例えば、本発明は、ステップ・アンド・スキャン方式の露光装置以外にステップ・アンド・リピート方式の露光装置、ステップ・アンド・スティッチ方式等の露光装置に適用することが可能である。また、半導体素子、液晶表示素子の製造に用いられる露光装置だけでなく、プラズマディスプレイ、薄膜磁気ヘッド、及び撮像素子(CCDなど)の製造にも用いられる露光装置、並びにレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも本発明を適用できる。さらに、投影光学系と基板との間に純水等の液体を満たした状態で露光する液浸方式の露光装置にも適用可能である。即ち、本発明は、露光装置の露光方式や用途等に関係なく適用可能である。なお、本発明は露光装置に用いられる場合に限られず、撮像した画像から基準パターン(テンプレートパターン)を抽出して、テンプレートマッチングを行う装置、方法であれば、適用可能である。
【0043】
なお、前述した本発明の実施形態に係る露光装置(図1)は、照明光学系1、レチクルステージ3、ベース4、及び駆動装置5を含むレチクルアライメント系、ウエハホルダ6、ウエハステージ7、移動鏡8、及びレーザ干渉計9を含むウエハアライメント系、投影光学系PL等の図1に示された各構成要素が電気的、機械的、又は光学的に連結して組み上げられた後、総合調整(電気調整、動作確認等)をすることにより製造される。なお、露光装置の製造は、温度及びクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0044】
本発明の実施形態に係る露光装置を使用したデバイスの製造は、まず、設計ステップにおいて、デバイスの機能設計(例えば、半導体デバイスの回路設計等)を行い、その機能を実現するためのパターン設計を行う。引き続き、マスク製作ステップにおいて、設計した回路パターンを形成したマスクを製作する。一方、ウエハ製造ステップにおいて、シリコン等の材料を用いてウエハを製造する。次に、ウエハプロセスステップにおいて、上記ステップで用意したマスクとウエハを使用して、リソグラフィ技術によってウエハ上に実際の回路等を形成する。次いで、組立ステップにおいて、処理されたウエハを用いてチップ化する。この組立ステップには、アッセンブリ工程(ダイシング、ボンディング)、パッケージング工程(チップ封入)等の工程が含まれる。最後に、検査ステップにおいて、作製されたデバイスの動作確認テスト、耐久性テスト等の検査を行う。こうした工程を経た後にデバイスが完成し、これが出荷される。
【図面の簡単な説明】
【0045】
【図1】本発明の実施形態に係る露光装置の全体構成を示す図である。
【図2】本発明の実施形態に係るウエハの上面図である
【図3】本発明の実施形態に係るFIA演算ユニットの概略構成を示すブロック図である。
【図4】本発明の実施形態に係る候補パターンの抽出処理を示すフローチャートである。
【図5】本発明の実施形態に係る候補パターンの適性判断処理を示すフローチャートである。
【図6】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その1)である。
【図7】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その2)である。
【図8】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その3)である。
【図9】本発明の実施形態に係る候補パターン抽出処理を説明するための図(その4)である。
【図10】本発明の実施形態に係る露光処理の全体の流れを示すフローチャートである。
【符号の説明】
【0046】
1…照明光学系、R…レチクル、EL…露光光、PL…投影光学系、W…ウエハ、7…ウエハステージ、10…主制御系、12…アライメントセンサ、26…撮像素子、27…FIA演算ユニット、33…画像信号記憶部、34…FIA制御部、36…テンプレートデータ記憶部、37…位置演算部、AreaI…入カデータ範囲、AreaT…仮のテンプレート、AreaS…窓。
【特許請求の範囲】
【請求項1】
実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法であって、
前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の信号情報を計測する第1工程と、
前記第1工程で計測された信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出する第2工程と、
前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を計測する第3工程と、
前記第3工程で計測された信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出する第4工程と、
前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する第5工程と、
を備えることを特徴とする基準パターン抽出方法。
【請求項2】
前記第5工程は、前記候補パターンに係る信号と前記比較パターンに係る信号のとの差分を、予め設定された所定の閾値と比較する工程を含むことを特徴とする請求項1に記載の基準パターン抽出方法。
【請求項3】
前記第3工程で複数の前記第2所定領域について前記計測を行うとともに、前記第4工程でこれらに対応して複数の比較パターンを抽出し、
前記第5工程は、前記候補パターンに係る信号と複数の前記比較パターンに係る信号を統計処理した値とを比較する工程を含むことを特徴とする請求項1に記載の基準パターン抽出方法。
【請求項4】
前記統計処理を、前記候補パターンに係る信号をも含めて行うようにしたことを特徴とする請求項3に記載の基準パターン抽出方法。
【請求項5】
請求項1〜4の何れか一項に記載の基準パターン抽出方法を用いて抽出された基準パターンをテンプレートとして、物体上の該基準パターンに対応するパターンの位置を計測する計測工程と、
前記計測工程で計測されたパターンの位置に基づいて、当該物体を位置決めする位置決め工程と、
を備えることを特徴とする位置決め方法。
【請求項6】
実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内で、ユニークな信号特徴を有する基準パターンを計測して、該物体を位置決めする位置決め装置であって、
前記被計測領域を計測するための計測視野を有する計測装置と、
前記物体を保持し、該物体の前記被計測領域を前記計測装置の前記計測視野内に設定するように該物体を移動させる物体搬送装置と、
前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の前記計測装置により計測して得られる信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出し、
前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を前記計測装置により計測して得られる信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出し、
前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する制御装置と、
を備えることを特徴とする位置決め装置。
【請求項7】
マスクのパターンを介して物体を露光する露光装置であって、
請求項6に記載の位置決め装置を備えることを特徴とする露光装置。
【請求項1】
実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内でユニークな信号特徴を有する基準パターンを抽出する基準パターン抽出方法であって、
前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の信号情報を計測する第1工程と、
前記第1工程で計測された信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出する第2工程と、
前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を計測する第3工程と、
前記第3工程で計測された信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出する第4工程と、
前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する第5工程と、
を備えることを特徴とする基準パターン抽出方法。
【請求項2】
前記第5工程は、前記候補パターンに係る信号と前記比較パターンに係る信号のとの差分を、予め設定された所定の閾値と比較する工程を含むことを特徴とする請求項1に記載の基準パターン抽出方法。
【請求項3】
前記第3工程で複数の前記第2所定領域について前記計測を行うとともに、前記第4工程でこれらに対応して複数の比較パターンを抽出し、
前記第5工程は、前記候補パターンに係る信号と複数の前記比較パターンに係る信号を統計処理した値とを比較する工程を含むことを特徴とする請求項1に記載の基準パターン抽出方法。
【請求項4】
前記統計処理を、前記候補パターンに係る信号をも含めて行うようにしたことを特徴とする請求項3に記載の基準パターン抽出方法。
【請求項5】
請求項1〜4の何れか一項に記載の基準パターン抽出方法を用いて抽出された基準パターンをテンプレートとして、物体上の該基準パターンに対応するパターンの位置を計測する計測工程と、
前記計測工程で計測されたパターンの位置に基づいて、当該物体を位置決めする位置決め工程と、
を備えることを特徴とする位置決め方法。
【請求項6】
実質的に同一の加工が施された複数の所定領域を有する物体上の該所定領域内に任意に設定される該所定領域よりも小さい面積を有する被計測領域内で、ユニークな信号特徴を有する基準パターンを計測して、該物体を位置決めする位置決め装置であって、
前記被計測領域を計測するための計測視野を有する計測装置と、
前記物体を保持し、該物体の前記被計測領域を前記計測装置の前記計測視野内に設定するように該物体を移動させる物体搬送装置と、
前記複数の所定領域のうち任意に選択される第1所定領域内で、前記被計測領域の前記計測装置により計測して得られる信号情報に基づいて、前記被計測領域内でユニークな信号特徴を有する候補パターンを抽出し、
前記複数の所定領域のうちの前記第1所定領域とは異なる第2所定領域内で、前記被計測領域を前記計測装置により計測して得られる信号情報に基づいて、前記候補パターンに対応する比較パターンを抽出し、
前記比較パターンに基づいて、前記候補パターンの前記基準パターンとしての適性を判断する制御装置と、
を備えることを特徴とする位置決め装置。
【請求項7】
マスクのパターンを介して物体を露光する露光装置であって、
請求項6に記載の位置決め装置を備えることを特徴とする露光装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−324160(P2007−324160A)
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2006−149237(P2006−149237)
【出願日】平成18年5月30日(2006.5.30)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成18年5月30日(2006.5.30)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]