
報知システム
【課題】 通行人や車両等の移動体の安全性を向上させる。
【解決手段】 道路に分散して配置された複数の検出装置10が、その配置位置周辺の検出対象領域内に存在する通行人を検出し、複数の検出装置10のうち何れかの検出装置10によって通行人が検出された場合に、車両(乗員)に対して注意を促す。これにより、検出装置10の配置位置に基づいて検出対象領域が決まる。このため、この検出対象領域を通行人にとって危険とされる車道に設定すれば、道路地図情報及び現在位置情報を利用しなくても、どの領域に第1移動体が存在するのかを特定することができる。したがって、通行人の有無を検出するのに要する処理速度が遅くなってしまうことを抑制することができるので、通行人及び車両の安全性を向上させることができる。
【解決手段】 道路に分散して配置された複数の検出装置10が、その配置位置周辺の検出対象領域内に存在する通行人を検出し、複数の検出装置10のうち何れかの検出装置10によって通行人が検出された場合に、車両(乗員)に対して注意を促す。これにより、検出装置10の配置位置に基づいて検出対象領域が決まる。このため、この検出対象領域を通行人にとって危険とされる車道に設定すれば、道路地図情報及び現在位置情報を利用しなくても、どの領域に第1移動体が存在するのかを特定することができる。したがって、通行人の有無を検出するのに要する処理速度が遅くなってしまうことを抑制することができるので、通行人及び車両の安全性を向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路上に存在する車両や通行人等の移動体に対して注意を促す報知システムに関する。
【背景技術】
【0002】
報知システムとしては、道路上の所定領域内に車両や通行人等の障害物が存在することを、その障害物の周囲に存在する移動体に対して通知したり、道路上の所定領域内に侵入した移動体に対してその旨を通知したりするものがある。
【0003】
そして、特許文献1に記載の発明では、道路地図を表す道路地図情報と、通行人の現在位置を表す現在位置情報とに基づいて、その通行人が危険な領域と安全な領域とのうち何れの領域内に存在するのかを検出し、その検出結果を通行人の周囲に存在する車両に対して報知している(例えば、特許文献1参照)。
【特許文献1】特開2004−157847号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の発明では、現在位置情報と道路地図情報とを比較することにより、通行人が危険な領域と安全な領域とのうち何れの領域内に存在するのかを検出するので、その検出に要する処理速度が遅くなってしまう。
【0005】
そして、通行人の検出に要する処理速度が遅くなってしまうと、通行人を検出してから車両に注意を促すまでに要する時間も遅れてしまうので、交通事故を引き起こしてしまうおそれがある。
【0006】
本発明は、上記点に鑑み、移動体の安全性を向上させることを目的とする。
【課題を解決するための手段】
【0007】
上記目標を達成するためになされた請求項1に記載の発明は、道路上に存在する移動体に対して注意を促す報知システムであって、道路に分散して配置された複数の移動体検出手段が、特定の検出対象領域内に存在する第1移動体を検出し、複数の移動体検出手段のうち何れかの移動体検出手段によって第1移動体が検出された場合に、その検出された第1移動体とは異なる第2移動体に対して、報知手段が注意を促す。
【0008】
これによれば、移動体検出手段の配置位置に基づいて検出対象領域が決まる。このため、この検出対象領域を第1移動体にとって危険とされる領域に設定すれば、道路地図情報及び現在位置情報を利用しなくても、第1移動体が危険な領域と安全な領域とのうち何れの領域に存在するのかを特定することができるので、危険な領域に存在する第1移動体の有無を検出するのに要する処理速度が遅くなってしまうことを抑制することができる。
【0009】
したがって、危険な領域に存在する第1移動体の有無を検出してから第2移動体に注意を促すまでに要する時間を短縮することができるので、移動体の安全性を向上させることができる。
【0010】
また、請求項2に記載の発明では、第2移動体が道路上において進むべき向きが、道路の向きとして予め決められている場合において、移動体検出手段により検出された第1移動体が、道路の向きとは反対向きに移動している場合には、第1移動体が道路の向きと同一の向きに移動している場合に比べて、報知手段が第2移動体に対して注意を促す報知対象領域の範囲を大きくする報知対象領域可変手段を備えたことを特徴とする。
【0011】
つまり、第1移動体が道路の向きとは反対向きに移動している場合には、第1移動体が道路の向きと同一の向きに移動している場合に比べて、第1移動体が第2移動体に対して接近する可能性が高いので、この場合に報知対象領域の範囲を大きくすれば、第1移動体の存在をより早く第2移動体に知らせることができる。
【0012】
なお、請求項1又は請求項2に記載の発明は、請求項3に記載のように、第1移動体が車両であり、第2移動体が通行人であってもよいし、請求項4に記載のように、第1移動体が通行人であり、第2移動体が車両であってもよい。
【0013】
また、請求項5に記載の発明は、道路上に存在する移動体に対して注意を促す報知システムであって、道路に分散して配置され、特定の検出対象領域に侵入した移動体を検出する複数の移動体検出手段と、複数の移動体検出手段のうち何れかの移動体検出手段によって移動体が検出された場合に、その検出された移動体に対して注意を促す報知手段とを備えたことを特徴とする。
【0014】
これによれば、移動体検出手段の配置位置に基づいて検出対象領域が決まるので、この検出対象領域を移動体にとって危険とされる領域に設定すれば、道路地図情報及び現在位置情報を利用しなくても、移動体が危険な領域と安全な領域とのうち何れの領域に存在するのかを特定することができる。したがって、請求項1で述べた効果と同様に、移動体の安全性を向上させることができる。
【発明を実施するための最良の形態】
【0015】
本実施形態は、本発明に係る報知システムを、車道を走行する車両や車道上に存在する通行人等の移動体に対して注意を促す報知システムに適用したものであり、以下に実施形態を図面と共に説明する。
【0016】
1.報知システムの全体構成
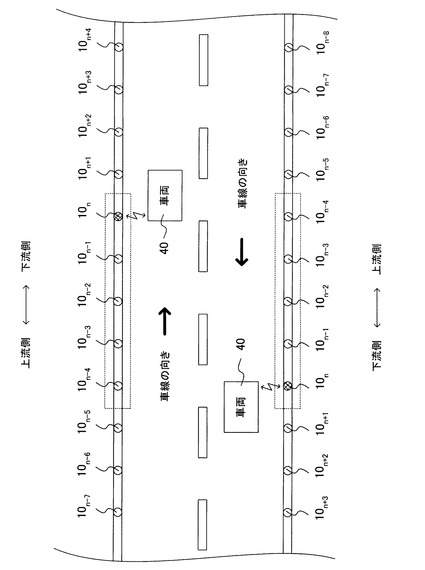
図1は本実施形態に係る報知システムの全体構成を表すブロック図であり、図2は検出装置10の配置位置を説明する説明図である。
【0017】
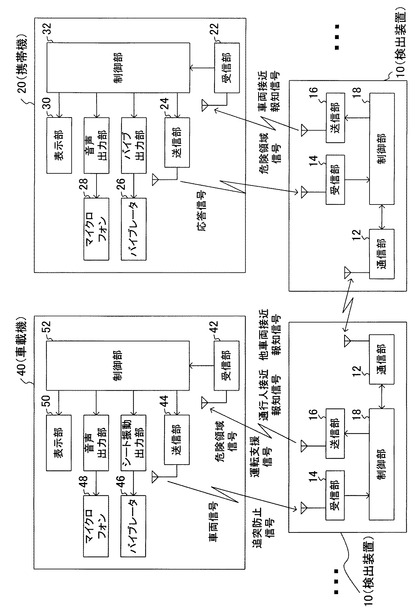
本実施形態の報知システムは、図1に示すように、道路に分散して配置されて車道上の車両及び通行人を検出する複数の検出装置10、通行人に所持されて検出装置10との間で通信を行う携帯機20、並びに車両に搭載されて検出装置10との間で通信を行う車載機40等を有して構成されている。
【0018】
検出装置10の各々は、携帯機20又は車載機40との通信に基づいて、検出装置10の配置位置周辺の検出対象領域内に存在する通行人(携帯機20)又は車両(車載機40)を検出するものである。
【0019】
そして、検出装置10は、図1に示すように、他の検出装置10との間で通信を行う通信部12、各種信号を受信する受信部14、各種信号を送信する送信部16、及び装置全体を統括制御する制御部18等を有して構成されている。なお、送信部16は、車道側へ向いた指向特性を有する送信アンテナにて構成されている。
【0020】
携帯機20は、図1に示すように、各種信号を受信する受信部22、各種信号を送信する送信部24、バイブレータ26、マイクロフォン28、各種情報を表示する表示部30、及び装置全体を統括制御する制御部32等を備えている。
【0021】
車載機40は、図1に示すように、各種信号を受信する受信部42、各種信号を送信する送信部44、運転席に設けられたバイブレータ46、マイクロフォン48、各種情報を表示する表示部50、及び装置全体を統括制御する制御部52等を備えている。なお、受信部42は、車両の前方右側と前方左側との2カ所に配置されており、送信部44は、車両の前方側と後方側との2カ所に配置されている。
【0022】
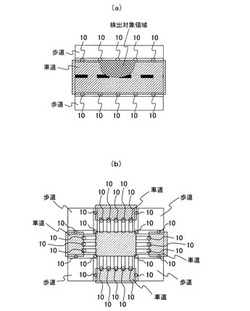
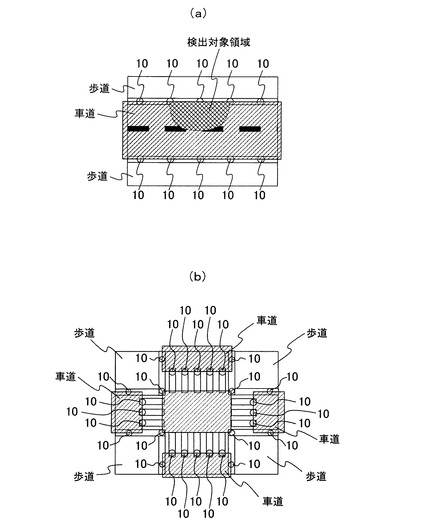
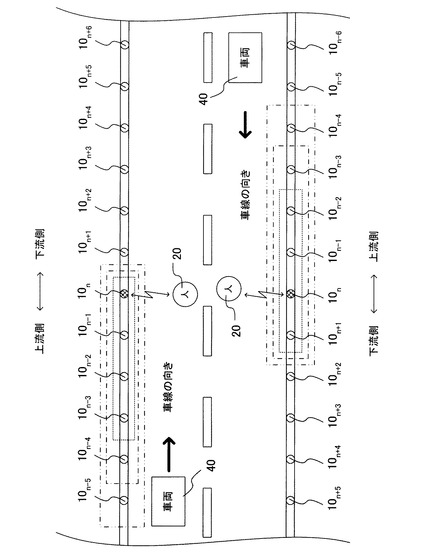
一方、各検出装置10の検出対象領域は、図2(a)で網掛けが施された領域に示すように、車道に存在する車両及び通行人がどの車線に存在するのかを検出装置10が検出することが可能な領域となるようにされている。なお、車線とは、車道において車両が進むべき向き(以下、「車線の向き」という。)が法律上定められた路線のことである。
【0023】
また、検出装置10全体では、図2で斜線が施された領域に示すように、横断歩道を除いた車道に存在する車両及び通行人を検出することができるようされており、この検出装置10は、横断歩道の白線に埋め込まれているとともに、所定の間隔(本実施形態では10m)の間隔を空けて、車道と歩道とを分断する白線に沿って埋め込まれている。
【0024】
つまり、本実施形態では、全ての検出装置10のうち少なくとも1つの検出装置10と携帯機20及び車載機40との間で通信ができる領域(横断歩道を除いた車道)と、通信ができない領域(横断歩道及び歩道)との2つの領域に区分される。
【0025】
なお、横断歩道を除いた車道は通行人にとって危険な領域であり、横断歩道及び歩道は通行人にとって安全とみなすことができる領域であることから、以下の説明では、横断歩道を除いた車道のことを「危険領域」といい、横断歩道及び歩道のことを「安全領域」という。
【0026】
また、検出装置10の送信部16は、現在位置が危険領域であることを表す危険領域信号を、検出対象領域内に常時発信し、携帯機20は、この危険領域信号を受信した場合に応答信号を発信する。
【0027】
また、車載機40に設けられた2つの送信部44のうち前方側に配置された送信部44は、車両が存在することを表す車両信号を常時発信する。後方側に配置された送信部44は、車両後方側へ向いた指向特性を有する送信アンテナにて構成されており、この送信部44は、車両が他車両に追突されるのを防止するための追突防止信号を常時発信する。
【0028】
そして、本実施形態において、応答信号、車両信号及び追突防止信号の発信領域は、検出対象領域と略同一の範囲となるようにされている。
以上説明したように、本実施形態では、図2に示すように、危険領域の一部として設定された検出対象領域内に検出装置10が危険領域信号を常時発信するので、携帯機20及び車載機40は、危険領域信号を受信した場合に、自らがその携帯機20(通行人)及び車載機40(車両)が検出対象領域(危険領域)に存在することを検出(認識)する。
【0029】
また、携帯機20は、危険領域信号を受信した場合に応答信号を検出対象領域と略同一の範囲内に応答信号を発信するので、検出装置10は、応答信号を受信した場合に、自らがこの検出対象領域に通行人が存在することを検出する。
【0030】
また、車載機40からは車両信号が検出対象領域と略同一の範囲内に常時発信されるので、検出装置10は、車両信号を受信した場合に、自らがこの検出対象領域に車両が存在することを検出する。
【0031】
2.報知システムの作動
2.1.報知システムの概略作動(図1参照)
本実施形態の報知システムでは、通行人に対しては、通行人が危険領域に存在することを報知したり、車両が接近していることを報知し、車両の乗員に対しては、車両が危険領域に存在する通行人に接近していることを報知したり、車両の前方に他の車両が存在することを報知したり、車両が危険領域から外れたことを報知したりする。
【0032】
まず、通行人に対してこの通行人が危険領域に存在することを報知する動作の流れ、及び車両の乗員に対してこの車両が危険領域に存在する通行人に接近していることを報知する動作の流れについて説明する。
【0033】
危険領域信号が携帯機20により受信されることで、通行人が危険領域に存在することがこの携帯機20により検出されると、この携帯機20は、バイブレータ26を作動させたり、マイクロフォン28から音声を発生させたり、表示部30に注意換気用のメッセージを表示させたりする報知動作を行うことで、この携帯機20の利用者(通行人)に対して通行人が危険領域に存在することを報知するとともに、応答信号を発信する。
【0034】
また、検出装置10により応答信号が受信されることで、危険領域に通行人が存在することがこの検出装置10により検出されると、この検出装置10は、通行人接近報知信号を発信すべき他の検出装置10、及び運転支援信号を発信すべき他の検出装置10を決定する。
【0035】
なお、通行人接近報知信号とは、通行人の存在を車両に知らせるための信号であり、運転支援信号とは、車両に対してブレーキを作動させる等の運転支援処理を実行させるための信号である。
【0036】
そして、危険領域に通行人が存在することを検出した(応答信号を受信した)検出装置10は、通行人接近報知信号及び運転支援信号を検出対象領域内に発信すると同時に、通行人接近報知信号を発信すべき他の検出装置10に対して通行人接近報知信号の発信指令を送信し、かつ、運転支援信号を発信すべき他の検出装置10に対して運転支援信号の発信指令を送信する。
【0037】
一方、検出装置10から発信された通行人接近報知信号が車載機40により受信されると、この車載機40は、バイブレータ46を作動させたり、マイクロフォン48から音声を発生させたり、表示部50に注意換気用のメッセージを表示させたりする報知動作を行うことで、この車両の乗員に対して、この車両が通行人に接近していることを報知する。
【0038】
また、検出装置10から発信された運転支援信号が車載機40により受信された場合には、この車載機40は、上記運転支援処理を実行することで、車両に対してブレーキを作動させる。
【0039】
次に、通行人に対して車両が接近していることを報知する動作の流れについて説明する。
車両信号が検出装置10により受信されることで、車両が危険領域に存在することが検出されると、検出装置10は、車両の存在を通行人に知らせるための車両接近報知信号を発信すべき他の検出装置10を決定する。
【0040】
そして、車両が危険領域に存在することを検出した(車両信号を受信した)検出装置10は、車両接近報知信号を発信すべき他の検出装置10を決定すると、車両接近報知信号を検出対象領域内に発信すると同時に、この検出装置10により決定された他の検出装置10に対して車両接近報知信号の発信指令を送信する。
【0041】
一方、検出装置10から発信された車両接近報知信号が携帯機20により受信されると、この携帯機20は、上述した報知動作を行うことで、この携帯機20の利用者(通行人)に対して、車両が接近していることを報知する。
【0042】
次に、車両の乗員に対してこの車両の前方に他の車両が存在することを報知する動作の流れについて説明する。
車載機40から常時発信される追突防止信号が検出装置10により受信されると、この検出装置10は、他車両接近報知信号及び運転支援信号を発信すべき他の検出装置10を決定する。なお、他車両接近報知信号とは、車両が他の車両(追突防止信号を発信した車両)に接近していることを知らせるための信号である。
【0043】
そして、追突防止信号を受信した検出装置10は、他車両接近報知信号及び運転支援信号を検出対象領域内に発信すると同時に、他車両接近報知信号を発信すべき他の検出装置10に対して他車両接近報知信号の発信指令を送信し、かつ、運転支援信号を発信すべき他の検出装置10に対して運転支援信号の発信指令を送信する。
【0044】
一方、検出装置10から発信された他車両接近報知信号が車載機40により受信されると、この車載機40は、上述した報知動作を行うことで、この車両の乗員に対して、この車両の前方に他の車両が存在することを報知する。
【0045】
また、検出装置10から発信された運転支援信号が車載機40により受信された場合には、この車載機40は、上記運転支援処理を実行することで、車両に対してブレーキを作動させる。
【0046】
最後に、車両の乗員に対してこの車両が危険領域から外れたことを報知する動作の流れについて説明する。
車載機40は、2つの受信部42のうち何れかの受信部42で危険領域信号が受信されなくなると、上述した報知動作を行うことで、車両の乗員に対してこの車両が危険領域から外れた旨を報知し、その後、2つの受信部42の両方で危険領域信号が受信されなくなると、上述した運転支援処理を実行する。
【0047】
2.2.検出装置10の作動
図3は、検出装置10の制御部18で実行される通行人接近報知信号発信処理を示すフローチャートであり、図4は、検出装置10が通行人接近報知信号を発信させるために決定した他の検出装置10を説明する説明図である。また、図5は、検出装置10の制御部18で実行される車両接近報知信号発信処理を示すフローチャートであり、図6は、検出装置10が車両接近報知信号を発信させるために決定した他の検出装置10を説明する説明図である。また、図7は、検出装置10の制御部18で実行される他車両接近報知信号発信処理を示すフローチャートであり、図8は、検出装置10が他車両接近報知信号を発信させるために決定した他の検出装置10を説明する説明図である。
【0048】
なお、以下の説明では、説明をわかりやすくするために、車道に通行人が一人だけ存在する場合、及び車線(車道)に車両が一台だけ存在する場合を例に挙げて説明する。
また、以下の説明において、検出装置10を区別して説明する場合には、図4、6、8に示すように、各種信号を受信した検出装置10を「検出装置10n」とし、この検出装置10nよりも車線の上流側(車線の向きとは反対側)に配置された検出装置10を、「検出装置10n−1、10n−2、…、10n−k」とし、検出装置10nよりも車線の下流側(車線の向き側)に配置された検出装置10を「10n+1、10n+2、…、10n+k」として説明する。
【0049】
2.2.1.通行人接近報知信号発信処理(図3及び図4参照)
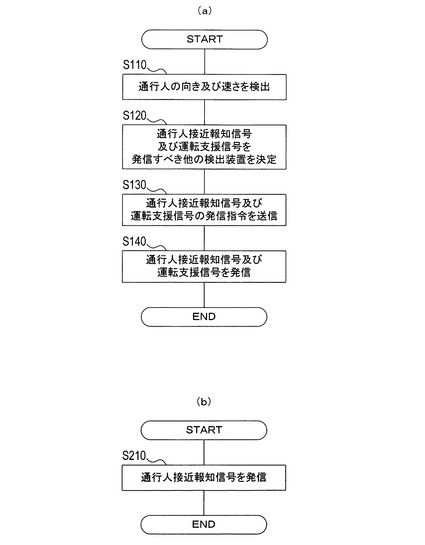
図3(a)に示す制御フローは、受信部14が携帯機20からの応答信号を受信したときに実行される処理であり、図3(a)に示す制御フローが実行されると、その応答信号を発信した携帯機20を所持する通行人が移動している向き(以下、「通行人の移動の向き」という。)及び速さが検出される(S110)。
【0050】
ここで、本実施形態では、受信部14が応答信号を受信した時に、その受信時刻を制御部18がRAMに記憶(更新)するようにされており、S110の処理では、応答信号を受信した検出装置10nの上流側及び下流側に配置された検出装置10(例えば、検出装置10n+1、10n−1)との間で通信を行い、検出装置10nが受信した応答信号を発信した携帯機20(応答信号)の受信時刻が、検出装置10n+1、10n−1から取得される。
【0051】
続いて、その取得した2つの受信時刻のうち最新の受信時刻と、応答信号を受信した検出装置10nに記憶された受信時刻と基づいて、通行人の移動の向き及び速さが検出される。
【0052】
そして、通行人の移動の向き及び速さが検出されると(S110)、その検出結果に基づいて、通行人接近報知信号を発信すべき他の検出装置10が決定されるとともに、運転支援信号を発信すべき他の検出装置10が決定される(S120)。
【0053】
具体的に説明すると、本実施形態では、通行人の移動の向きが車線の向きと同じ向きの場合には、図4の点線で囲まれた部分に示すように、応答信号を受信した検出装置10nから車線の下流側に向かって1つ目(隣)に配置される検出装置10n+1と、検出装置10nから車線の上流側に向かって1つ目(隣)及び2つ目に配置される検出装置10n−1、10n−2との合計3つの検出装置10n+1、10n−1、10n−2が、通行人接近報知信号を発信すべき他の検出装置10として決定される。
【0054】
また、通行人の移動の向きが車線の向きとは反対側の向きであって、通行人の速さが所定の速さよりも遅い場合には、図4の一点鎖線で囲まれた部分に示すように、検出装置10nから車線の下流側に向かって1つ目に配置される検出装置10n+1と、検出装置10nから車線の上流側に向かって1つ目から3つ目までに配置される検出装置10n−1、10n−3との合計4つの検出装置10n+1、10n−1〜10n−3が、通行人接近報知信号を発信すべき他の検出装置10として決定される。
【0055】
また、通行人の移動の向きが車線の向きとは反対側の向きであって、通行人の速さが所定の速さよりも速い場合には、図4の二点鎖線で囲まれた部分に示すように、検出装置10nから車線の下流側に向かって1つ目に配置される検出装置10n+1と、検出装置10nから車線の上流側に向かって1つ目から4つ目までに配置される検出装置10n−1〜10n−4との合計5つの検出装置10n+1、10n−1〜10n−4が、通行人接近報知信号を発信すべき他の検出装置10として決定される。
【0056】
つまり、通行人の移動の向きが車線の向きとは反対側の向きの場合には、通行人の移動の向きと車線の向きとが同じ向きの場合に比べて、通行人接近報知信号を発信する検出装置10の数が増加するので、通行人接近報知信号が発信される範囲が大きくなる。
【0057】
また、S120の処理では、通行人の移動の向き及び速さに関係なく、運転支援信号を発信すべき他の検出装置10が決定され、本実施形態では、検出装置10nから車線の上流側に向かって1つ目及び2つ目に配置される検出装置10n−1、10n−2の合計2つの検出装置10n−1、10n−2が、運転支援信号を発信すべき他の検出装置10として決定される。
【0058】
そして、通行人接近報知信号及び運転支援信号を発信すべき他の検出装置10が決定されると(S120)、通行人接近報知信号の発信指令、及び運転支援信号の発信指令が通信部12を介して送信される(S130)。
【0059】
そして、通行人接近報知信号の発信指令、及び運転支援信号の発信指令が送信されると(S130)、通行人接近報知信号及び運転支援信号が送信部16から発信され(S140)、本制御フローが終了する。
【0060】
また、図3(b)に示す制御フローは、通信部12が通行人接近報知信号の発信指令を他の検出装置10から受信したときに実行される処理であり、図3(b)に示す制御フローが実行されると、通行人接近報知信号が送信部16から発信され(S210)、本制御フローが終了する。
【0061】
なお、通行人接近報知信号の発信指令及び運転支援信号の発信指令を通信部12が受信していた場合には、通行人接近報知信号及び運転支援信号が送信部16から発信される(S210)。
【0062】
2.2.2.車両接近報知信号発信処理(図5及び図6参照)
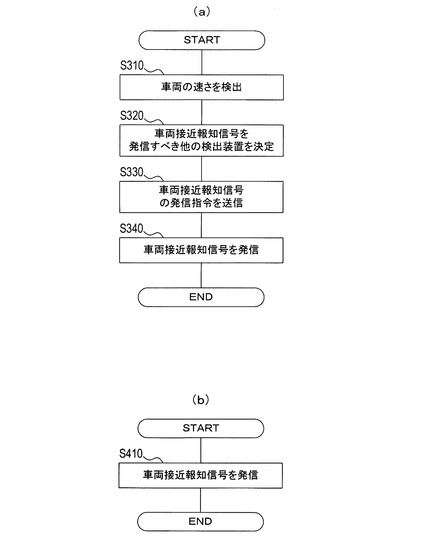
図5(a)に示す制御フローは、受信部14が車載機40からの車両信号を受信したときに実行される処理であり、図5(a)に示す制御フローが実行されると、その車両信号を発信した車載機40を搭載した車両の速さが検出される(S310)。なお、車両の速さを検出する方法は、S110の処理と同じである。
【0063】
そして、車両の速さが検出されると(S310)、その検出結果に基づいて、車両接近報知信号を発信すべき他の検出装置10が決定される(S320)。
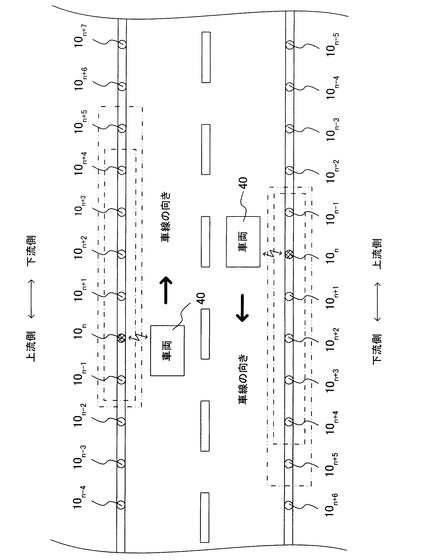
具体的に説明すると、本実施形態では、車両の速さが所定の速さよりも遅い場合には、図6の一点鎖線で囲まれた部分に示すように、車両信号を受信した検出装置10nから車線の下流側に向かって1つ目(隣)から4つ目までに配置される検出装置10n+1〜10n+4と、検出装置10nから車線の上流側に向かって1つ目(隣)に配置される検出装置10n−1との合計5つの検出装置10n+1〜10n+4、10n−1が、車両接近報知信号を発信すべき他の検出装置10として決定される。
【0064】
また、車両の速さが所定の速さよりも速い場合には、図6の二点鎖線で囲まれた部分に示すように、検出装置10nから車線の下流側に向かって1つ目から5つ目までに配置される検出装置10n+1〜10n+5と、検出装置10nから車線の上流側に向かって1つ目に配置される検出装置10n−1との合計6つの検出装置10n+1〜10n+5、10n−1が、車両接近報知信号を発信すべき他の検出装置10として決定される。
【0065】
つまり、車両の速さが所定の速さよりも速かった場合には、車両の速さが所定の速さよりも遅かった場合に比べて、車両接近報知信号を発信する検出装置10の数が増加するので、車両接近報知信号が発信される範囲が大きくなる。
【0066】
そして、車両接近報知信号を発信すべき他の検出装置10が決定されると(S320)、車両接近報知信号の発信指令が通信部12を介して送信されるとともに(S330)、車両接近報知信号が送信部16から発信され(S340)、本制御フローが終了する。
【0067】
また、図5(b)に示す制御フローは、通信部12が車両接近報知信号の発信指令を他の検出装置10から受信したときに実行される処理であり、図5(b)に示す制御フローが実行されると、車両接近報知信号が送信部16から発信され(S410)、車両接近報知信号発信処理が終了する。
【0068】
2.2.3.他車両接近報知信号発信処理(図7及び図8参照)
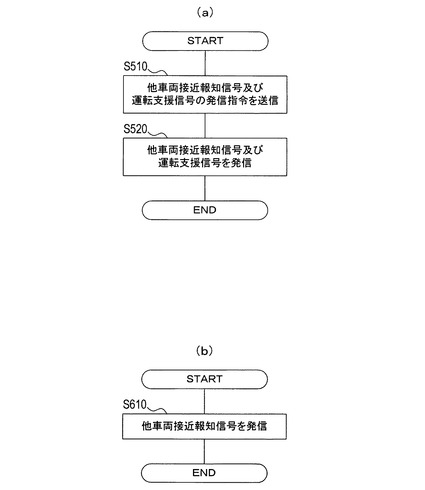
図7(a)に示す制御フローは、受信部14が車載機40からの追突防止信号を受信したときに実行される処理であり、この他車両接近報知信号発信処理が実行されると、他車両接近報知信号を発信すべき他の検出装置10に対して、他車両接近報知信号の発信指令が通信部12を介して送信されるとともに、運転支援信号を発信すべき他の検出装置10に対して、運転支援信号の発信指令が通信部12を介して送信される(S510)。
【0069】
なお、図7(a)に示す制御フローでは、他車両接近報知信号を発信すべき他の検出装置10、及び運転支援信号を発信すべき他の検出装置10が予め決められており、本実施形態では、図8の点線で囲まれた部分に示すように、追突防止信号を受信した検出装置10nから車線の上流側に向かって1つ目から4つ目までに配置される4つの検出装置10n−1〜10n−4が、他車両接近報知信号を発信すべき他の検出装置10として決定されている。
【0070】
また、検出装置10nから車線の上流側に向かって1つ目及び2つ目に配置される2つの検出装置10n−1、10n−2が、運転支援信号を発信すべき他の検出装置10として決定されている。
【0071】
そして、他車両接近報知信号の発信指令、及び運転支援信号の発信指令が送信されると(S510)、他車両接近報知信号及び運転支援信号が送信部16から発信され(S520)、本制御フローが終了する。
【0072】
また、図7(b)に示す制御フローは、通信部12が他車両接近報知信号の発信指令を他の検出装置10から受信したときに実行される処理であり、図7(b)に示す制御フローが実行されると、他車両接近報知信号が送信部16から発信され(S610)、本制御フローが終了する。
【0073】
なお、他車両接近報知信号の発信指令及び運転支援信号の発信指令を通信部12が受信していた場合には、他車両接近報知信号及び運転支援信号が送信部16から発信される(S710)。
【0074】
2.3.携帯機20の作動
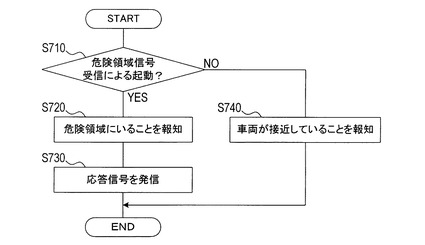
図9は携帯機20の制御部32で実行される制御フローを示すフローチャートであり、図9に示す制御フローは、受信部22が危険領域信号を受信したとき、又は、受信部22が車両接近報知信号を受信したときに携帯機20の制御部32で実行される。そして、この制御フローが起動されると、まず今回の起動が危険領域信号の受信によるものか、又は、車両接近報知信号の受信によるものかが判定される(S710)。
【0075】
そして、今回の起動が危険領域信号の受信によるものであると判定された場合には(S710:YES)、報知動作が行われることにより、携帯機20の利用者(通行人)が危険領域に存在することが、その利用者に対して報知され(S720)、その後、応答信号が送信部24から発信されて、本制御フローが終了する。
【0076】
一方、今回の起動が車両接近報知信号の受信によるものであると判定された場合には(S710:NO)、S720と同様の報知動作が行われることにより、携帯機20の利用者(通行人)に車両が接近していることが、その利用者に対して報知され(S740)、本制御フローが終了する。
【0077】
2.4.車載機40の作動
2.4.1.報知処理
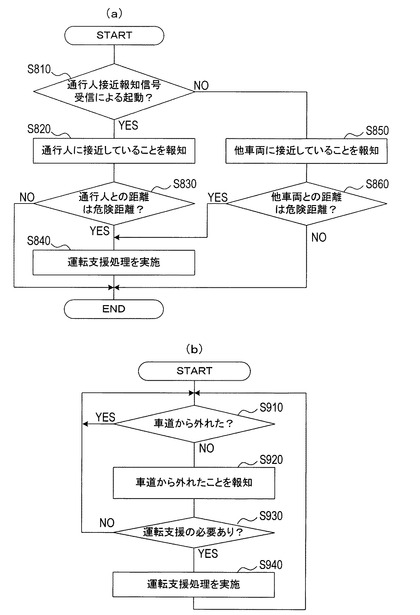
図10(a)は車載機40の制御部52で実行される報知処理を示すフローチャートである。報知処理(図10(a)に示す制御フロー)は、受信部42が通行人接近報知信号を受信したとき、又は、受信部42が他車両接近報知信号を受信したときに車載機40の制御部52で実行される。
【0078】
図10(a)に示す制御フローが起動されると、今回の起動が通行人接近報知信号の受信によるものであるか、又は、他車両接近報知信号の受信によるものかが判定される(S810)。
【0079】
そして、今回の起動が通行人接近報知信号の受信によるものであると判定された場合には(S810:YES)、報知動作が行われることにより、車両が通行人に接近していることが車両の乗員(運転者)に対して報知される(S820)。
【0080】
そして、S820の処理で報知動作が行われると、受信部42が運転支援信号を受信したか否かが判定され(S830)、受信部42が運転支援信号を受信していないと判定された場合には(S830:NO)、車両と通行人との距離が危険な距離となるまで車両が通行人に接近していないと判断されて報知処理が終了する。
【0081】
一方、受信部42が運転支援信号を受信したと判定された場合には(S830:YES)、通行人と車両との距離が危険な距離となるまで車両が通行人に接近したと判断され、上述した運転支援処理が実行されて(S840)、報知処理が終了する。
【0082】
なお、運転支援信号の発信範囲は、上述したように、通行人を検出した(応答信号を受信した)検出装置10nに対して、車線の上流側に向かって1つ目及び2つ目に配置される検出装置10n−1、10n−2であるため、本実施形態では、通行人を検出した検出装置10nに対して、車両が25m以内に近づいたときに、運転支援処理が実行される。
【0083】
また、今回の起動が他車両接近報知信号の受信によるものであると判定された場合には(S810:NO)、S820の処理と同様の報知動作が行われることにより、この車両の前方に他の車両が存在することが車両の乗員(運転者)に対して報知される(S850)。
【0084】
そして、S850の処理で報知動作が行われると、受信部42が運転支援信号を受信したか否かが判定され(S860)、運転支援信号を受信していないと判定された場合には(S860:NO)、車両と他の車両との距離が危険な距離となるまで車両が他の車両に接近していないと判断されて報知処理が終了する。
【0085】
一方、受信部42が運転支援信号を受信したと判定された場合には(S860:YES)、車両と他の車両との距離が危険な距離となるまで車両が他の車両に接近したと判断され、上述した運転支援処理が実行されて(S840)、報知処理が終了する。
【0086】
2.4.2.安全領域侵入検出処理
図10(b)は、車載機40の制御部52で実行される安全領域侵入検出処理を示すフローチャートである。安全領域侵入検出処理(図10(b)に示す制御フロー)は、車両のエンジンが始動したときに車載機40の制御部52で実行され、この制御フローが実行されると、2つの受信部42の両方が危険領域信号を受信しているか否かが判定される(S910)。
【0087】
そして、2つの受信部42の両方が危険領域信号を受信していると判定された場合には(S910:YES)、車両が危険領域に存在する(安全領域に侵入していない)と判断され、S910の処理が繰り返し実行される。
【0088】
一方、2つの受信部42のうち少なくとも一方が危険領域信号を受信していないと判定された場合には(S910:NO)、S520の処理と同様の報知動作が行われることにより、車両が危険領域(車道)から外れたことが車両の乗員(運転者)に対して報知される(S920)。
【0089】
そして、S920の処理で報知動作が行われると、2つの(全ての)受信部42が危険領域信号を受信していないか否かが判定され(S930)、全ての受信部42が危険領域信号を受信していないと判定された場合には(S930:YES)、上述した運転支援処理が実行され(S940)、S910の処理に戻る。
【0090】
一方、少なくとも一方の受信部42が危険領域信号を受信していると判定された場合には(S930:NO)、S910の処理に戻り、2つの受信部42の両方が危険領域信号を受信しているか否かが判定される(S910)。
【0091】
3.本実施形態に係る報知システムの特徴
本実施形態では、道路に分散して配置された複数の検出装置10が、その配置位置周辺の検出対象領域内に存在する通行人又は車両等の第1移動体を検出し、複数の検出装置10のうち何れかの検出装置10によって第1移動体が検出された場合に、その第1移動体及び第1移動体とは異なる第2移動体に対して注意を促す。
【0092】
ここで、検出対象領域は、検出装置10の配置位置に基づいて決まるので、本実施形態では、通行人にとって危険とされる車道(横断歩道を除いた車道)を検出対象領域として設定している。
【0093】
このため、道路地図情報及び現在位置情報を利用しなくても、第1移動体が危険領域と安全領域とのうち何れの領域に存在するのかを特定することができるので、危険領域に存在する第1移動体の有無を検出するのに要する処理速度が遅くなってしまうことを抑制することができる。
【0094】
したがって、危険領域に存在する第1移動体の有無を検出してから、第1移動体又は第2移動体に注意を促すまでに要する時間を短縮することができるので、移動体の安全性を向上させることができる。
【0095】
ところで、通行人が車線の向きとは反対側の向きに移動している場合には、通行人が車線の向きと同一の向きに移動している場合に比べて、通行人が車両に接近する可能性が高いので、本実施形態では、この場合に、通行人接近報知信号が発信される範囲を大きくしている。このため、通行人が車両に接近している場合には、通行人接近報知信号が発信される範囲が大きくなるので、通行人の存在をより早く車両に知らせることができる。
【0096】
また、本実施形態では、車両の速さが所定の速さよりも速かった場合に車両接近報知信号が発信される範囲を大きくしている。つまり、車両の速さが大きくなるほど、通行人が存在する位置に到達するまでの時間も短くなるので、本実施形態では車両の速さが所定の速さよりも速かった場合に車両接近報知信号が発信される範囲を大きくすることで、車両の存在をより早く通行人に知らせることができる。
【0097】
4.発明特定事項と実施形態との対応関係
本実施形態では、検出装置10、携帯機20及び車載機40が特許請求の範囲に記載された移動体検出手段に相当し、携帯機20及び車載機40が特許請求の範囲に記載された報知手段に相当する。
【0098】
(その他の実施形態)
上記実施形態では、通行人接近報知信号が発信される範囲を大きくすることで、車両に対して通行人の存在を早めに知らせるようにされていたが、これに限らず、検出装置10が通行人を検出したときに、その検出装置10の検出対象領域を大きくするようにしてもよい。
【0099】
このようにした場合には、通行人の存在を早めに検出することができるので、上記実施形態と同様に、通行人の存在を車両に対して早めに知らせることができる。また同様に、検出装置10が車両を検出したときに、その検出装置10の検出対象領域を広げるようにしてもよい。
【0100】
また、上記実施形態では、通行人接近報知信号が発信される範囲、及び車両接近報知信号が発信される範囲を変えるようにしていたが、これと同様に、他車両接近報知信号が発信される範囲を変えるようにしてもよい。
【0101】
また、検出装置10にLEDやライト等の可視光を発する発光手段が設けられていれば、検出装置10が発光するので、夜間や悪天候(雨、雪等)といった悪条件下で車両の運転を実施する場合においても、運転者は白線(延いては車道)を確認することができ、車両の安全性を向上させることができる。
【0102】
また、上記実施形態では、検出装置10を道路の白線に埋め込むようにしていたが、これに限らず、検出装置10はガードレールや信号機に設置されていてもよい。
また、上記実施形態では、車道に通行人が一人だけ存在する場合、及び車道に車両が一台だけ存在する場合を例に挙げて説明したが、これに限らず、複数の通行人が車道に存在してもよいし、複数の車両が車道に存在してもよい。
【0103】
また、上記実施形態では、通行人接近報知信号発信処理(図3参照)、車両接近報知信号発信処理(図5参照)、及び他車両接近報知信号発信処理(図7参照)の3つの処理が並列的に作動するものとして説明したが、この3つの処理は直列的に実行される処理でもよい。
【0104】
また、本発明は、ソフトウェアにより構築されていてもよいし、ハードウェアにより構築されていてもよい。
ところで、現在では、目の不自由な人の安全を確保するために歩道の一部が凹凸状に形成されているが、目の不自由な人にとって安全な領域と危険な領域とを区別することができれば、歩道の一部を凹凸状に形成しなくてもよい。
【0105】
ここで、上記実施形態(本発明)では、検出装置10を用いて携帯機20及び車載機40と検出装置10との間で通信可能な領域と、通信不能な領域とを設けることで、通行人にとって安全な領域(安全領域)と危険な領域(危険領域)とを区別するようにしていた。
【0106】
このため、本発明を歩道に適用して目の不自由な人が検出可能領域から外れてしまったときに、危険領域に侵入したと判断するようにすれば、目の不自由な人の安全を確保することができるとともに、歩道全体を平らにする(歩道のバリアフリー化を実現する)ことができる。
【0107】
また、この変形例では、道路の表面を平らにする(歩道のバリアフリー化を実現する)ことができるので、目の不自由な人は通常使用している確認棒を持たなくても安心して道路を歩行することができ、更に、車椅子で走行する人による移動の負担を軽減することができる。
【0108】
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【図面の簡単な説明】
【0109】
【図1】実施形態に係る報知システムの全体構成を表すブロック図である。
【図2】検出装置の配置位置を説明する説明図である。
【図3】検出装置の制御部で実行される通行人接近報知信号発信処理を示すフローチャートである。
【図4】検出装置が通行人接近報知信号を発信させるために決定した他の検出装置を説明する説明図である。
【図5】検出装置の制御部で実行される車両接近報知信号発信処理を示すフローチャートである。
【図6】検出装置が車両接近報知信号を発信させるために決定した他の検出装置を説明する説明図である。
【図7】検出装置の制御部で実行される他車両接近報知信号発信処理を示すフローチャートである。
【図8】検出装置が他車両接近報知信号を発信させるために決定した他の検出装置を説明する説明図である。
【図9】携帯機の制御部で実行される処理を示すフローチャートである。
【図10】車載機の制御部で実行される処理を示すフローチャートである。
【符号の説明】
【0110】
10…検出装置、12…通信部、14…受信部、16…送信部、18…制御部、20…携帯機、22…受信部、24…送信部、26…バイブレータ、28…マイクロフォン、30…表示部、32…制御部、40…車載機、42…受信部、44…送信部、46…バイブレータ、48…マイクロフォン、50…表示部、52…制御部。
【技術分野】
【0001】
本発明は、道路上に存在する車両や通行人等の移動体に対して注意を促す報知システムに関する。
【背景技術】
【0002】
報知システムとしては、道路上の所定領域内に車両や通行人等の障害物が存在することを、その障害物の周囲に存在する移動体に対して通知したり、道路上の所定領域内に侵入した移動体に対してその旨を通知したりするものがある。
【0003】
そして、特許文献1に記載の発明では、道路地図を表す道路地図情報と、通行人の現在位置を表す現在位置情報とに基づいて、その通行人が危険な領域と安全な領域とのうち何れの領域内に存在するのかを検出し、その検出結果を通行人の周囲に存在する車両に対して報知している(例えば、特許文献1参照)。
【特許文献1】特開2004−157847号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の発明では、現在位置情報と道路地図情報とを比較することにより、通行人が危険な領域と安全な領域とのうち何れの領域内に存在するのかを検出するので、その検出に要する処理速度が遅くなってしまう。
【0005】
そして、通行人の検出に要する処理速度が遅くなってしまうと、通行人を検出してから車両に注意を促すまでに要する時間も遅れてしまうので、交通事故を引き起こしてしまうおそれがある。
【0006】
本発明は、上記点に鑑み、移動体の安全性を向上させることを目的とする。
【課題を解決するための手段】
【0007】
上記目標を達成するためになされた請求項1に記載の発明は、道路上に存在する移動体に対して注意を促す報知システムであって、道路に分散して配置された複数の移動体検出手段が、特定の検出対象領域内に存在する第1移動体を検出し、複数の移動体検出手段のうち何れかの移動体検出手段によって第1移動体が検出された場合に、その検出された第1移動体とは異なる第2移動体に対して、報知手段が注意を促す。
【0008】
これによれば、移動体検出手段の配置位置に基づいて検出対象領域が決まる。このため、この検出対象領域を第1移動体にとって危険とされる領域に設定すれば、道路地図情報及び現在位置情報を利用しなくても、第1移動体が危険な領域と安全な領域とのうち何れの領域に存在するのかを特定することができるので、危険な領域に存在する第1移動体の有無を検出するのに要する処理速度が遅くなってしまうことを抑制することができる。
【0009】
したがって、危険な領域に存在する第1移動体の有無を検出してから第2移動体に注意を促すまでに要する時間を短縮することができるので、移動体の安全性を向上させることができる。
【0010】
また、請求項2に記載の発明では、第2移動体が道路上において進むべき向きが、道路の向きとして予め決められている場合において、移動体検出手段により検出された第1移動体が、道路の向きとは反対向きに移動している場合には、第1移動体が道路の向きと同一の向きに移動している場合に比べて、報知手段が第2移動体に対して注意を促す報知対象領域の範囲を大きくする報知対象領域可変手段を備えたことを特徴とする。
【0011】
つまり、第1移動体が道路の向きとは反対向きに移動している場合には、第1移動体が道路の向きと同一の向きに移動している場合に比べて、第1移動体が第2移動体に対して接近する可能性が高いので、この場合に報知対象領域の範囲を大きくすれば、第1移動体の存在をより早く第2移動体に知らせることができる。
【0012】
なお、請求項1又は請求項2に記載の発明は、請求項3に記載のように、第1移動体が車両であり、第2移動体が通行人であってもよいし、請求項4に記載のように、第1移動体が通行人であり、第2移動体が車両であってもよい。
【0013】
また、請求項5に記載の発明は、道路上に存在する移動体に対して注意を促す報知システムであって、道路に分散して配置され、特定の検出対象領域に侵入した移動体を検出する複数の移動体検出手段と、複数の移動体検出手段のうち何れかの移動体検出手段によって移動体が検出された場合に、その検出された移動体に対して注意を促す報知手段とを備えたことを特徴とする。
【0014】
これによれば、移動体検出手段の配置位置に基づいて検出対象領域が決まるので、この検出対象領域を移動体にとって危険とされる領域に設定すれば、道路地図情報及び現在位置情報を利用しなくても、移動体が危険な領域と安全な領域とのうち何れの領域に存在するのかを特定することができる。したがって、請求項1で述べた効果と同様に、移動体の安全性を向上させることができる。
【発明を実施するための最良の形態】
【0015】
本実施形態は、本発明に係る報知システムを、車道を走行する車両や車道上に存在する通行人等の移動体に対して注意を促す報知システムに適用したものであり、以下に実施形態を図面と共に説明する。
【0016】
1.報知システムの全体構成
図1は本実施形態に係る報知システムの全体構成を表すブロック図であり、図2は検出装置10の配置位置を説明する説明図である。
【0017】
本実施形態の報知システムは、図1に示すように、道路に分散して配置されて車道上の車両及び通行人を検出する複数の検出装置10、通行人に所持されて検出装置10との間で通信を行う携帯機20、並びに車両に搭載されて検出装置10との間で通信を行う車載機40等を有して構成されている。
【0018】
検出装置10の各々は、携帯機20又は車載機40との通信に基づいて、検出装置10の配置位置周辺の検出対象領域内に存在する通行人(携帯機20)又は車両(車載機40)を検出するものである。
【0019】
そして、検出装置10は、図1に示すように、他の検出装置10との間で通信を行う通信部12、各種信号を受信する受信部14、各種信号を送信する送信部16、及び装置全体を統括制御する制御部18等を有して構成されている。なお、送信部16は、車道側へ向いた指向特性を有する送信アンテナにて構成されている。
【0020】
携帯機20は、図1に示すように、各種信号を受信する受信部22、各種信号を送信する送信部24、バイブレータ26、マイクロフォン28、各種情報を表示する表示部30、及び装置全体を統括制御する制御部32等を備えている。
【0021】
車載機40は、図1に示すように、各種信号を受信する受信部42、各種信号を送信する送信部44、運転席に設けられたバイブレータ46、マイクロフォン48、各種情報を表示する表示部50、及び装置全体を統括制御する制御部52等を備えている。なお、受信部42は、車両の前方右側と前方左側との2カ所に配置されており、送信部44は、車両の前方側と後方側との2カ所に配置されている。
【0022】
一方、各検出装置10の検出対象領域は、図2(a)で網掛けが施された領域に示すように、車道に存在する車両及び通行人がどの車線に存在するのかを検出装置10が検出することが可能な領域となるようにされている。なお、車線とは、車道において車両が進むべき向き(以下、「車線の向き」という。)が法律上定められた路線のことである。
【0023】
また、検出装置10全体では、図2で斜線が施された領域に示すように、横断歩道を除いた車道に存在する車両及び通行人を検出することができるようされており、この検出装置10は、横断歩道の白線に埋め込まれているとともに、所定の間隔(本実施形態では10m)の間隔を空けて、車道と歩道とを分断する白線に沿って埋め込まれている。
【0024】
つまり、本実施形態では、全ての検出装置10のうち少なくとも1つの検出装置10と携帯機20及び車載機40との間で通信ができる領域(横断歩道を除いた車道)と、通信ができない領域(横断歩道及び歩道)との2つの領域に区分される。
【0025】
なお、横断歩道を除いた車道は通行人にとって危険な領域であり、横断歩道及び歩道は通行人にとって安全とみなすことができる領域であることから、以下の説明では、横断歩道を除いた車道のことを「危険領域」といい、横断歩道及び歩道のことを「安全領域」という。
【0026】
また、検出装置10の送信部16は、現在位置が危険領域であることを表す危険領域信号を、検出対象領域内に常時発信し、携帯機20は、この危険領域信号を受信した場合に応答信号を発信する。
【0027】
また、車載機40に設けられた2つの送信部44のうち前方側に配置された送信部44は、車両が存在することを表す車両信号を常時発信する。後方側に配置された送信部44は、車両後方側へ向いた指向特性を有する送信アンテナにて構成されており、この送信部44は、車両が他車両に追突されるのを防止するための追突防止信号を常時発信する。
【0028】
そして、本実施形態において、応答信号、車両信号及び追突防止信号の発信領域は、検出対象領域と略同一の範囲となるようにされている。
以上説明したように、本実施形態では、図2に示すように、危険領域の一部として設定された検出対象領域内に検出装置10が危険領域信号を常時発信するので、携帯機20及び車載機40は、危険領域信号を受信した場合に、自らがその携帯機20(通行人)及び車載機40(車両)が検出対象領域(危険領域)に存在することを検出(認識)する。
【0029】
また、携帯機20は、危険領域信号を受信した場合に応答信号を検出対象領域と略同一の範囲内に応答信号を発信するので、検出装置10は、応答信号を受信した場合に、自らがこの検出対象領域に通行人が存在することを検出する。
【0030】
また、車載機40からは車両信号が検出対象領域と略同一の範囲内に常時発信されるので、検出装置10は、車両信号を受信した場合に、自らがこの検出対象領域に車両が存在することを検出する。
【0031】
2.報知システムの作動
2.1.報知システムの概略作動(図1参照)
本実施形態の報知システムでは、通行人に対しては、通行人が危険領域に存在することを報知したり、車両が接近していることを報知し、車両の乗員に対しては、車両が危険領域に存在する通行人に接近していることを報知したり、車両の前方に他の車両が存在することを報知したり、車両が危険領域から外れたことを報知したりする。
【0032】
まず、通行人に対してこの通行人が危険領域に存在することを報知する動作の流れ、及び車両の乗員に対してこの車両が危険領域に存在する通行人に接近していることを報知する動作の流れについて説明する。
【0033】
危険領域信号が携帯機20により受信されることで、通行人が危険領域に存在することがこの携帯機20により検出されると、この携帯機20は、バイブレータ26を作動させたり、マイクロフォン28から音声を発生させたり、表示部30に注意換気用のメッセージを表示させたりする報知動作を行うことで、この携帯機20の利用者(通行人)に対して通行人が危険領域に存在することを報知するとともに、応答信号を発信する。
【0034】
また、検出装置10により応答信号が受信されることで、危険領域に通行人が存在することがこの検出装置10により検出されると、この検出装置10は、通行人接近報知信号を発信すべき他の検出装置10、及び運転支援信号を発信すべき他の検出装置10を決定する。
【0035】
なお、通行人接近報知信号とは、通行人の存在を車両に知らせるための信号であり、運転支援信号とは、車両に対してブレーキを作動させる等の運転支援処理を実行させるための信号である。
【0036】
そして、危険領域に通行人が存在することを検出した(応答信号を受信した)検出装置10は、通行人接近報知信号及び運転支援信号を検出対象領域内に発信すると同時に、通行人接近報知信号を発信すべき他の検出装置10に対して通行人接近報知信号の発信指令を送信し、かつ、運転支援信号を発信すべき他の検出装置10に対して運転支援信号の発信指令を送信する。
【0037】
一方、検出装置10から発信された通行人接近報知信号が車載機40により受信されると、この車載機40は、バイブレータ46を作動させたり、マイクロフォン48から音声を発生させたり、表示部50に注意換気用のメッセージを表示させたりする報知動作を行うことで、この車両の乗員に対して、この車両が通行人に接近していることを報知する。
【0038】
また、検出装置10から発信された運転支援信号が車載機40により受信された場合には、この車載機40は、上記運転支援処理を実行することで、車両に対してブレーキを作動させる。
【0039】
次に、通行人に対して車両が接近していることを報知する動作の流れについて説明する。
車両信号が検出装置10により受信されることで、車両が危険領域に存在することが検出されると、検出装置10は、車両の存在を通行人に知らせるための車両接近報知信号を発信すべき他の検出装置10を決定する。
【0040】
そして、車両が危険領域に存在することを検出した(車両信号を受信した)検出装置10は、車両接近報知信号を発信すべき他の検出装置10を決定すると、車両接近報知信号を検出対象領域内に発信すると同時に、この検出装置10により決定された他の検出装置10に対して車両接近報知信号の発信指令を送信する。
【0041】
一方、検出装置10から発信された車両接近報知信号が携帯機20により受信されると、この携帯機20は、上述した報知動作を行うことで、この携帯機20の利用者(通行人)に対して、車両が接近していることを報知する。
【0042】
次に、車両の乗員に対してこの車両の前方に他の車両が存在することを報知する動作の流れについて説明する。
車載機40から常時発信される追突防止信号が検出装置10により受信されると、この検出装置10は、他車両接近報知信号及び運転支援信号を発信すべき他の検出装置10を決定する。なお、他車両接近報知信号とは、車両が他の車両(追突防止信号を発信した車両)に接近していることを知らせるための信号である。
【0043】
そして、追突防止信号を受信した検出装置10は、他車両接近報知信号及び運転支援信号を検出対象領域内に発信すると同時に、他車両接近報知信号を発信すべき他の検出装置10に対して他車両接近報知信号の発信指令を送信し、かつ、運転支援信号を発信すべき他の検出装置10に対して運転支援信号の発信指令を送信する。
【0044】
一方、検出装置10から発信された他車両接近報知信号が車載機40により受信されると、この車載機40は、上述した報知動作を行うことで、この車両の乗員に対して、この車両の前方に他の車両が存在することを報知する。
【0045】
また、検出装置10から発信された運転支援信号が車載機40により受信された場合には、この車載機40は、上記運転支援処理を実行することで、車両に対してブレーキを作動させる。
【0046】
最後に、車両の乗員に対してこの車両が危険領域から外れたことを報知する動作の流れについて説明する。
車載機40は、2つの受信部42のうち何れかの受信部42で危険領域信号が受信されなくなると、上述した報知動作を行うことで、車両の乗員に対してこの車両が危険領域から外れた旨を報知し、その後、2つの受信部42の両方で危険領域信号が受信されなくなると、上述した運転支援処理を実行する。
【0047】
2.2.検出装置10の作動
図3は、検出装置10の制御部18で実行される通行人接近報知信号発信処理を示すフローチャートであり、図4は、検出装置10が通行人接近報知信号を発信させるために決定した他の検出装置10を説明する説明図である。また、図5は、検出装置10の制御部18で実行される車両接近報知信号発信処理を示すフローチャートであり、図6は、検出装置10が車両接近報知信号を発信させるために決定した他の検出装置10を説明する説明図である。また、図7は、検出装置10の制御部18で実行される他車両接近報知信号発信処理を示すフローチャートであり、図8は、検出装置10が他車両接近報知信号を発信させるために決定した他の検出装置10を説明する説明図である。
【0048】
なお、以下の説明では、説明をわかりやすくするために、車道に通行人が一人だけ存在する場合、及び車線(車道)に車両が一台だけ存在する場合を例に挙げて説明する。
また、以下の説明において、検出装置10を区別して説明する場合には、図4、6、8に示すように、各種信号を受信した検出装置10を「検出装置10n」とし、この検出装置10nよりも車線の上流側(車線の向きとは反対側)に配置された検出装置10を、「検出装置10n−1、10n−2、…、10n−k」とし、検出装置10nよりも車線の下流側(車線の向き側)に配置された検出装置10を「10n+1、10n+2、…、10n+k」として説明する。
【0049】
2.2.1.通行人接近報知信号発信処理(図3及び図4参照)
図3(a)に示す制御フローは、受信部14が携帯機20からの応答信号を受信したときに実行される処理であり、図3(a)に示す制御フローが実行されると、その応答信号を発信した携帯機20を所持する通行人が移動している向き(以下、「通行人の移動の向き」という。)及び速さが検出される(S110)。
【0050】
ここで、本実施形態では、受信部14が応答信号を受信した時に、その受信時刻を制御部18がRAMに記憶(更新)するようにされており、S110の処理では、応答信号を受信した検出装置10nの上流側及び下流側に配置された検出装置10(例えば、検出装置10n+1、10n−1)との間で通信を行い、検出装置10nが受信した応答信号を発信した携帯機20(応答信号)の受信時刻が、検出装置10n+1、10n−1から取得される。
【0051】
続いて、その取得した2つの受信時刻のうち最新の受信時刻と、応答信号を受信した検出装置10nに記憶された受信時刻と基づいて、通行人の移動の向き及び速さが検出される。
【0052】
そして、通行人の移動の向き及び速さが検出されると(S110)、その検出結果に基づいて、通行人接近報知信号を発信すべき他の検出装置10が決定されるとともに、運転支援信号を発信すべき他の検出装置10が決定される(S120)。
【0053】
具体的に説明すると、本実施形態では、通行人の移動の向きが車線の向きと同じ向きの場合には、図4の点線で囲まれた部分に示すように、応答信号を受信した検出装置10nから車線の下流側に向かって1つ目(隣)に配置される検出装置10n+1と、検出装置10nから車線の上流側に向かって1つ目(隣)及び2つ目に配置される検出装置10n−1、10n−2との合計3つの検出装置10n+1、10n−1、10n−2が、通行人接近報知信号を発信すべき他の検出装置10として決定される。
【0054】
また、通行人の移動の向きが車線の向きとは反対側の向きであって、通行人の速さが所定の速さよりも遅い場合には、図4の一点鎖線で囲まれた部分に示すように、検出装置10nから車線の下流側に向かって1つ目に配置される検出装置10n+1と、検出装置10nから車線の上流側に向かって1つ目から3つ目までに配置される検出装置10n−1、10n−3との合計4つの検出装置10n+1、10n−1〜10n−3が、通行人接近報知信号を発信すべき他の検出装置10として決定される。
【0055】
また、通行人の移動の向きが車線の向きとは反対側の向きであって、通行人の速さが所定の速さよりも速い場合には、図4の二点鎖線で囲まれた部分に示すように、検出装置10nから車線の下流側に向かって1つ目に配置される検出装置10n+1と、検出装置10nから車線の上流側に向かって1つ目から4つ目までに配置される検出装置10n−1〜10n−4との合計5つの検出装置10n+1、10n−1〜10n−4が、通行人接近報知信号を発信すべき他の検出装置10として決定される。
【0056】
つまり、通行人の移動の向きが車線の向きとは反対側の向きの場合には、通行人の移動の向きと車線の向きとが同じ向きの場合に比べて、通行人接近報知信号を発信する検出装置10の数が増加するので、通行人接近報知信号が発信される範囲が大きくなる。
【0057】
また、S120の処理では、通行人の移動の向き及び速さに関係なく、運転支援信号を発信すべき他の検出装置10が決定され、本実施形態では、検出装置10nから車線の上流側に向かって1つ目及び2つ目に配置される検出装置10n−1、10n−2の合計2つの検出装置10n−1、10n−2が、運転支援信号を発信すべき他の検出装置10として決定される。
【0058】
そして、通行人接近報知信号及び運転支援信号を発信すべき他の検出装置10が決定されると(S120)、通行人接近報知信号の発信指令、及び運転支援信号の発信指令が通信部12を介して送信される(S130)。
【0059】
そして、通行人接近報知信号の発信指令、及び運転支援信号の発信指令が送信されると(S130)、通行人接近報知信号及び運転支援信号が送信部16から発信され(S140)、本制御フローが終了する。
【0060】
また、図3(b)に示す制御フローは、通信部12が通行人接近報知信号の発信指令を他の検出装置10から受信したときに実行される処理であり、図3(b)に示す制御フローが実行されると、通行人接近報知信号が送信部16から発信され(S210)、本制御フローが終了する。
【0061】
なお、通行人接近報知信号の発信指令及び運転支援信号の発信指令を通信部12が受信していた場合には、通行人接近報知信号及び運転支援信号が送信部16から発信される(S210)。
【0062】
2.2.2.車両接近報知信号発信処理(図5及び図6参照)
図5(a)に示す制御フローは、受信部14が車載機40からの車両信号を受信したときに実行される処理であり、図5(a)に示す制御フローが実行されると、その車両信号を発信した車載機40を搭載した車両の速さが検出される(S310)。なお、車両の速さを検出する方法は、S110の処理と同じである。
【0063】
そして、車両の速さが検出されると(S310)、その検出結果に基づいて、車両接近報知信号を発信すべき他の検出装置10が決定される(S320)。
具体的に説明すると、本実施形態では、車両の速さが所定の速さよりも遅い場合には、図6の一点鎖線で囲まれた部分に示すように、車両信号を受信した検出装置10nから車線の下流側に向かって1つ目(隣)から4つ目までに配置される検出装置10n+1〜10n+4と、検出装置10nから車線の上流側に向かって1つ目(隣)に配置される検出装置10n−1との合計5つの検出装置10n+1〜10n+4、10n−1が、車両接近報知信号を発信すべき他の検出装置10として決定される。
【0064】
また、車両の速さが所定の速さよりも速い場合には、図6の二点鎖線で囲まれた部分に示すように、検出装置10nから車線の下流側に向かって1つ目から5つ目までに配置される検出装置10n+1〜10n+5と、検出装置10nから車線の上流側に向かって1つ目に配置される検出装置10n−1との合計6つの検出装置10n+1〜10n+5、10n−1が、車両接近報知信号を発信すべき他の検出装置10として決定される。
【0065】
つまり、車両の速さが所定の速さよりも速かった場合には、車両の速さが所定の速さよりも遅かった場合に比べて、車両接近報知信号を発信する検出装置10の数が増加するので、車両接近報知信号が発信される範囲が大きくなる。
【0066】
そして、車両接近報知信号を発信すべき他の検出装置10が決定されると(S320)、車両接近報知信号の発信指令が通信部12を介して送信されるとともに(S330)、車両接近報知信号が送信部16から発信され(S340)、本制御フローが終了する。
【0067】
また、図5(b)に示す制御フローは、通信部12が車両接近報知信号の発信指令を他の検出装置10から受信したときに実行される処理であり、図5(b)に示す制御フローが実行されると、車両接近報知信号が送信部16から発信され(S410)、車両接近報知信号発信処理が終了する。
【0068】
2.2.3.他車両接近報知信号発信処理(図7及び図8参照)
図7(a)に示す制御フローは、受信部14が車載機40からの追突防止信号を受信したときに実行される処理であり、この他車両接近報知信号発信処理が実行されると、他車両接近報知信号を発信すべき他の検出装置10に対して、他車両接近報知信号の発信指令が通信部12を介して送信されるとともに、運転支援信号を発信すべき他の検出装置10に対して、運転支援信号の発信指令が通信部12を介して送信される(S510)。
【0069】
なお、図7(a)に示す制御フローでは、他車両接近報知信号を発信すべき他の検出装置10、及び運転支援信号を発信すべき他の検出装置10が予め決められており、本実施形態では、図8の点線で囲まれた部分に示すように、追突防止信号を受信した検出装置10nから車線の上流側に向かって1つ目から4つ目までに配置される4つの検出装置10n−1〜10n−4が、他車両接近報知信号を発信すべき他の検出装置10として決定されている。
【0070】
また、検出装置10nから車線の上流側に向かって1つ目及び2つ目に配置される2つの検出装置10n−1、10n−2が、運転支援信号を発信すべき他の検出装置10として決定されている。
【0071】
そして、他車両接近報知信号の発信指令、及び運転支援信号の発信指令が送信されると(S510)、他車両接近報知信号及び運転支援信号が送信部16から発信され(S520)、本制御フローが終了する。
【0072】
また、図7(b)に示す制御フローは、通信部12が他車両接近報知信号の発信指令を他の検出装置10から受信したときに実行される処理であり、図7(b)に示す制御フローが実行されると、他車両接近報知信号が送信部16から発信され(S610)、本制御フローが終了する。
【0073】
なお、他車両接近報知信号の発信指令及び運転支援信号の発信指令を通信部12が受信していた場合には、他車両接近報知信号及び運転支援信号が送信部16から発信される(S710)。
【0074】
2.3.携帯機20の作動
図9は携帯機20の制御部32で実行される制御フローを示すフローチャートであり、図9に示す制御フローは、受信部22が危険領域信号を受信したとき、又は、受信部22が車両接近報知信号を受信したときに携帯機20の制御部32で実行される。そして、この制御フローが起動されると、まず今回の起動が危険領域信号の受信によるものか、又は、車両接近報知信号の受信によるものかが判定される(S710)。
【0075】
そして、今回の起動が危険領域信号の受信によるものであると判定された場合には(S710:YES)、報知動作が行われることにより、携帯機20の利用者(通行人)が危険領域に存在することが、その利用者に対して報知され(S720)、その後、応答信号が送信部24から発信されて、本制御フローが終了する。
【0076】
一方、今回の起動が車両接近報知信号の受信によるものであると判定された場合には(S710:NO)、S720と同様の報知動作が行われることにより、携帯機20の利用者(通行人)に車両が接近していることが、その利用者に対して報知され(S740)、本制御フローが終了する。
【0077】
2.4.車載機40の作動
2.4.1.報知処理
図10(a)は車載機40の制御部52で実行される報知処理を示すフローチャートである。報知処理(図10(a)に示す制御フロー)は、受信部42が通行人接近報知信号を受信したとき、又は、受信部42が他車両接近報知信号を受信したときに車載機40の制御部52で実行される。
【0078】
図10(a)に示す制御フローが起動されると、今回の起動が通行人接近報知信号の受信によるものであるか、又は、他車両接近報知信号の受信によるものかが判定される(S810)。
【0079】
そして、今回の起動が通行人接近報知信号の受信によるものであると判定された場合には(S810:YES)、報知動作が行われることにより、車両が通行人に接近していることが車両の乗員(運転者)に対して報知される(S820)。
【0080】
そして、S820の処理で報知動作が行われると、受信部42が運転支援信号を受信したか否かが判定され(S830)、受信部42が運転支援信号を受信していないと判定された場合には(S830:NO)、車両と通行人との距離が危険な距離となるまで車両が通行人に接近していないと判断されて報知処理が終了する。
【0081】
一方、受信部42が運転支援信号を受信したと判定された場合には(S830:YES)、通行人と車両との距離が危険な距離となるまで車両が通行人に接近したと判断され、上述した運転支援処理が実行されて(S840)、報知処理が終了する。
【0082】
なお、運転支援信号の発信範囲は、上述したように、通行人を検出した(応答信号を受信した)検出装置10nに対して、車線の上流側に向かって1つ目及び2つ目に配置される検出装置10n−1、10n−2であるため、本実施形態では、通行人を検出した検出装置10nに対して、車両が25m以内に近づいたときに、運転支援処理が実行される。
【0083】
また、今回の起動が他車両接近報知信号の受信によるものであると判定された場合には(S810:NO)、S820の処理と同様の報知動作が行われることにより、この車両の前方に他の車両が存在することが車両の乗員(運転者)に対して報知される(S850)。
【0084】
そして、S850の処理で報知動作が行われると、受信部42が運転支援信号を受信したか否かが判定され(S860)、運転支援信号を受信していないと判定された場合には(S860:NO)、車両と他の車両との距離が危険な距離となるまで車両が他の車両に接近していないと判断されて報知処理が終了する。
【0085】
一方、受信部42が運転支援信号を受信したと判定された場合には(S860:YES)、車両と他の車両との距離が危険な距離となるまで車両が他の車両に接近したと判断され、上述した運転支援処理が実行されて(S840)、報知処理が終了する。
【0086】
2.4.2.安全領域侵入検出処理
図10(b)は、車載機40の制御部52で実行される安全領域侵入検出処理を示すフローチャートである。安全領域侵入検出処理(図10(b)に示す制御フロー)は、車両のエンジンが始動したときに車載機40の制御部52で実行され、この制御フローが実行されると、2つの受信部42の両方が危険領域信号を受信しているか否かが判定される(S910)。
【0087】
そして、2つの受信部42の両方が危険領域信号を受信していると判定された場合には(S910:YES)、車両が危険領域に存在する(安全領域に侵入していない)と判断され、S910の処理が繰り返し実行される。
【0088】
一方、2つの受信部42のうち少なくとも一方が危険領域信号を受信していないと判定された場合には(S910:NO)、S520の処理と同様の報知動作が行われることにより、車両が危険領域(車道)から外れたことが車両の乗員(運転者)に対して報知される(S920)。
【0089】
そして、S920の処理で報知動作が行われると、2つの(全ての)受信部42が危険領域信号を受信していないか否かが判定され(S930)、全ての受信部42が危険領域信号を受信していないと判定された場合には(S930:YES)、上述した運転支援処理が実行され(S940)、S910の処理に戻る。
【0090】
一方、少なくとも一方の受信部42が危険領域信号を受信していると判定された場合には(S930:NO)、S910の処理に戻り、2つの受信部42の両方が危険領域信号を受信しているか否かが判定される(S910)。
【0091】
3.本実施形態に係る報知システムの特徴
本実施形態では、道路に分散して配置された複数の検出装置10が、その配置位置周辺の検出対象領域内に存在する通行人又は車両等の第1移動体を検出し、複数の検出装置10のうち何れかの検出装置10によって第1移動体が検出された場合に、その第1移動体及び第1移動体とは異なる第2移動体に対して注意を促す。
【0092】
ここで、検出対象領域は、検出装置10の配置位置に基づいて決まるので、本実施形態では、通行人にとって危険とされる車道(横断歩道を除いた車道)を検出対象領域として設定している。
【0093】
このため、道路地図情報及び現在位置情報を利用しなくても、第1移動体が危険領域と安全領域とのうち何れの領域に存在するのかを特定することができるので、危険領域に存在する第1移動体の有無を検出するのに要する処理速度が遅くなってしまうことを抑制することができる。
【0094】
したがって、危険領域に存在する第1移動体の有無を検出してから、第1移動体又は第2移動体に注意を促すまでに要する時間を短縮することができるので、移動体の安全性を向上させることができる。
【0095】
ところで、通行人が車線の向きとは反対側の向きに移動している場合には、通行人が車線の向きと同一の向きに移動している場合に比べて、通行人が車両に接近する可能性が高いので、本実施形態では、この場合に、通行人接近報知信号が発信される範囲を大きくしている。このため、通行人が車両に接近している場合には、通行人接近報知信号が発信される範囲が大きくなるので、通行人の存在をより早く車両に知らせることができる。
【0096】
また、本実施形態では、車両の速さが所定の速さよりも速かった場合に車両接近報知信号が発信される範囲を大きくしている。つまり、車両の速さが大きくなるほど、通行人が存在する位置に到達するまでの時間も短くなるので、本実施形態では車両の速さが所定の速さよりも速かった場合に車両接近報知信号が発信される範囲を大きくすることで、車両の存在をより早く通行人に知らせることができる。
【0097】
4.発明特定事項と実施形態との対応関係
本実施形態では、検出装置10、携帯機20及び車載機40が特許請求の範囲に記載された移動体検出手段に相当し、携帯機20及び車載機40が特許請求の範囲に記載された報知手段に相当する。
【0098】
(その他の実施形態)
上記実施形態では、通行人接近報知信号が発信される範囲を大きくすることで、車両に対して通行人の存在を早めに知らせるようにされていたが、これに限らず、検出装置10が通行人を検出したときに、その検出装置10の検出対象領域を大きくするようにしてもよい。
【0099】
このようにした場合には、通行人の存在を早めに検出することができるので、上記実施形態と同様に、通行人の存在を車両に対して早めに知らせることができる。また同様に、検出装置10が車両を検出したときに、その検出装置10の検出対象領域を広げるようにしてもよい。
【0100】
また、上記実施形態では、通行人接近報知信号が発信される範囲、及び車両接近報知信号が発信される範囲を変えるようにしていたが、これと同様に、他車両接近報知信号が発信される範囲を変えるようにしてもよい。
【0101】
また、検出装置10にLEDやライト等の可視光を発する発光手段が設けられていれば、検出装置10が発光するので、夜間や悪天候(雨、雪等)といった悪条件下で車両の運転を実施する場合においても、運転者は白線(延いては車道)を確認することができ、車両の安全性を向上させることができる。
【0102】
また、上記実施形態では、検出装置10を道路の白線に埋め込むようにしていたが、これに限らず、検出装置10はガードレールや信号機に設置されていてもよい。
また、上記実施形態では、車道に通行人が一人だけ存在する場合、及び車道に車両が一台だけ存在する場合を例に挙げて説明したが、これに限らず、複数の通行人が車道に存在してもよいし、複数の車両が車道に存在してもよい。
【0103】
また、上記実施形態では、通行人接近報知信号発信処理(図3参照)、車両接近報知信号発信処理(図5参照)、及び他車両接近報知信号発信処理(図7参照)の3つの処理が並列的に作動するものとして説明したが、この3つの処理は直列的に実行される処理でもよい。
【0104】
また、本発明は、ソフトウェアにより構築されていてもよいし、ハードウェアにより構築されていてもよい。
ところで、現在では、目の不自由な人の安全を確保するために歩道の一部が凹凸状に形成されているが、目の不自由な人にとって安全な領域と危険な領域とを区別することができれば、歩道の一部を凹凸状に形成しなくてもよい。
【0105】
ここで、上記実施形態(本発明)では、検出装置10を用いて携帯機20及び車載機40と検出装置10との間で通信可能な領域と、通信不能な領域とを設けることで、通行人にとって安全な領域(安全領域)と危険な領域(危険領域)とを区別するようにしていた。
【0106】
このため、本発明を歩道に適用して目の不自由な人が検出可能領域から外れてしまったときに、危険領域に侵入したと判断するようにすれば、目の不自由な人の安全を確保することができるとともに、歩道全体を平らにする(歩道のバリアフリー化を実現する)ことができる。
【0107】
また、この変形例では、道路の表面を平らにする(歩道のバリアフリー化を実現する)ことができるので、目の不自由な人は通常使用している確認棒を持たなくても安心して道路を歩行することができ、更に、車椅子で走行する人による移動の負担を軽減することができる。
【0108】
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【図面の簡単な説明】
【0109】
【図1】実施形態に係る報知システムの全体構成を表すブロック図である。
【図2】検出装置の配置位置を説明する説明図である。
【図3】検出装置の制御部で実行される通行人接近報知信号発信処理を示すフローチャートである。
【図4】検出装置が通行人接近報知信号を発信させるために決定した他の検出装置を説明する説明図である。
【図5】検出装置の制御部で実行される車両接近報知信号発信処理を示すフローチャートである。
【図6】検出装置が車両接近報知信号を発信させるために決定した他の検出装置を説明する説明図である。
【図7】検出装置の制御部で実行される他車両接近報知信号発信処理を示すフローチャートである。
【図8】検出装置が他車両接近報知信号を発信させるために決定した他の検出装置を説明する説明図である。
【図9】携帯機の制御部で実行される処理を示すフローチャートである。
【図10】車載機の制御部で実行される処理を示すフローチャートである。
【符号の説明】
【0110】
10…検出装置、12…通信部、14…受信部、16…送信部、18…制御部、20…携帯機、22…受信部、24…送信部、26…バイブレータ、28…マイクロフォン、30…表示部、32…制御部、40…車載機、42…受信部、44…送信部、46…バイブレータ、48…マイクロフォン、50…表示部、52…制御部。
【特許請求の範囲】
【請求項1】
道路上に存在する移動体に対して注意を促す報知システムであって、
道路に分散して配置され、特定の検出対象領域内に存在する第1移動体を検出する複数の移動体検出手段と、
前記複数の移動体検出手段のうち何れかの移動体検出手段によって第1移動体が検出された場合に、その検出された第1移動体とは異なる第2移動体に対して注意を促す報知手段と
を備えたことを特徴とする報知システム。
【請求項2】
前記第2移動体が道路上において進むべき向きが、道路の向きとして予め決められている場合において、
前記移動体検出手段により検出された第1移動体が、前記道路の向きとは反対向きに移動している場合には、前記第1移動体が前記道路の向きと同一の向きに移動している場合に比べて、前記報知手段が前記第2移動体に対して注意を促す報知対象領域の範囲を大きくする報知対象領域可変手段を備えたことを特徴とする請求項1に記載の報知システム。
【請求項3】
前記第1移動体が車両であり、前記第2移動体が通行人であることを特徴とする請求項1に記載の報知システム。
【請求項4】
前記第1移動体が通行人であり、前記第2移動体が車両であることを特徴とする請求項1又は請求項2に記載の報知システム。
【請求項5】
道路上に存在する移動体に対して注意を促す報知システムであって、
道路に分散して配置され、特定の検出対象領域に侵入した移動体を検出する複数の移動体検出手段と、
前記複数の移動体検出手段のうち何れかの移動体検出手段によって移動体が検出された場合に、その検出された移動体に対して注意を促す報知手段と
を備えたことを特徴とする報知システム。
【請求項1】
道路上に存在する移動体に対して注意を促す報知システムであって、
道路に分散して配置され、特定の検出対象領域内に存在する第1移動体を検出する複数の移動体検出手段と、
前記複数の移動体検出手段のうち何れかの移動体検出手段によって第1移動体が検出された場合に、その検出された第1移動体とは異なる第2移動体に対して注意を促す報知手段と
を備えたことを特徴とする報知システム。
【請求項2】
前記第2移動体が道路上において進むべき向きが、道路の向きとして予め決められている場合において、
前記移動体検出手段により検出された第1移動体が、前記道路の向きとは反対向きに移動している場合には、前記第1移動体が前記道路の向きと同一の向きに移動している場合に比べて、前記報知手段が前記第2移動体に対して注意を促す報知対象領域の範囲を大きくする報知対象領域可変手段を備えたことを特徴とする請求項1に記載の報知システム。
【請求項3】
前記第1移動体が車両であり、前記第2移動体が通行人であることを特徴とする請求項1に記載の報知システム。
【請求項4】
前記第1移動体が通行人であり、前記第2移動体が車両であることを特徴とする請求項1又は請求項2に記載の報知システム。
【請求項5】
道路上に存在する移動体に対して注意を促す報知システムであって、
道路に分散して配置され、特定の検出対象領域に侵入した移動体を検出する複数の移動体検出手段と、
前記複数の移動体検出手段のうち何れかの移動体検出手段によって移動体が検出された場合に、その検出された移動体に対して注意を促す報知手段と
を備えたことを特徴とする報知システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−123440(P2008−123440A)
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願番号】特願2006−309353(P2006−309353)
【出願日】平成18年11月15日(2006.11.15)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願日】平成18年11月15日(2006.11.15)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]