
塑性に伴う体積変化に関係するパラメータを考慮した機械特性作成システム
【課題】本発明は、実材料の試験によって得られる「公称ひずみ−公称応力」関係、「変位−荷重」関係及び「真ひずみ−体積変化に関係するパラメータ」関係とその試験を模擬するシミュレーションによって得られるそれらの関係との一致性が高い材料構成則へ入力される機械特性を求めるに当たって、作業を容易に且つ早く行うことが求められている。
【解決手段】本発明は、塑性に伴う体積変化に関係するパラメータを考慮した「真ひずみ−真応力」関係を求める方法を、塑性に伴う体積変化に関係するパラメータがポアソン比と等価で変化の無い物として仮の「真ひずみ−真応力」関係を推定し、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を思考錯誤して推定し、材料構成則に入力する適正な機械特性の作成に多大な労力が掛かる二つの要因を独立した推定を行う思考錯誤のプロセス1と思考錯誤のプロセス2を用いることにより飛躍的に少ない繰返しで適正な機械特性を作成する。
【解決手段】本発明は、塑性に伴う体積変化に関係するパラメータを考慮した「真ひずみ−真応力」関係を求める方法を、塑性に伴う体積変化に関係するパラメータがポアソン比と等価で変化の無い物として仮の「真ひずみ−真応力」関係を推定し、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を思考錯誤して推定し、材料構成則に入力する適正な機械特性の作成に多大な労力が掛かる二つの要因を独立した推定を行う思考錯誤のプロセス1と思考錯誤のプロセス2を用いることにより飛躍的に少ない繰返しで適正な機械特性を作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、弾性領域の機械特性測定に加え、測定範囲に塑性領域を含めた「真ひずみ−体積変化に関係するパラメータ」関係をデジタル画像相関法等により求め、それらの結果を利用して、各種材料の機械特性「公称ひずみ−公称応力」関係から、弾性ひずみ増分および塑性ひずみ増分を直列結合する種類の弾塑性材料構成則(以下、材料構成則)に入力する機械特性を求めるシステムに関するものである。
【背景技術】
【0002】
有限要素法によるシミュレーション(以下、シミュレーション)において、ある材料の塑性変形挙動を表現するには、その機械特性を入力することが必要である。
【0003】
多くの材料構成則では弾性ひずみと塑性ひずみは直列結合することを仮定して定式化され、材料の塑性変形挙動は表現される。ここで、体積変化に関係するパラメータをポアソン比でとらえて注意する。ポアソン比は弾性ひずみに対して適用される物理量であり、塑性ひずみには適用されないことに注意する。金属材料の場合、塑性変形はせん断変形であるため、体積塑性ひずみ増分が0となるような塑性ひずみ増分(テンソル量)が決定される。便宜上、塑性ひずみ増分の縦横比(数1)を塑性ポアソン比と定義すれば、金属材料の場合、塑性ポアソン比は0.5と考えることが可能である。一方、樹脂材料の引張変形においては、体積が膨張する現象が観察される。塑性ポアソン比が塑性変形量によって変化すると仮定することで、この現象を表現する手法が提案されている(非特許文献1)。
【数1】

【0004】
従来、「真ひずみ−真応力」関係は「公称ひずみ−公称応力」関係とポアソン比から見積もられてきた(数2、数3)。ここで、数2は一軸引張り、一軸圧縮の変換式、数3は二軸引張り、二軸圧縮の変換式である。しかし、この見積もり方法では、塑性ポアソン比を考慮していないため、塑性変形に伴う体積変化を高精度に表現することは出来ない。このため、例えば座屈挙動(非特許文献2)等、部品同士の接触・変形で解が分岐する繊細な問題では、部品の体積変化に伴う変形も考慮に入れなければ、実現象と異なる接触が誘発される恐れがあり、結果として、樹脂材料部品の複雑な変形挙動をシミュレーションで再現できない問題が起きる。
【数2】
【数3】
【0005】
例えば、特許文献1においてはボイドが誘発される塑性域の曲線、すなわち「真応力−対数塑性ひずみ」曲線の降伏後の曲線に任意の傾きを加えて、ボイド発生の効果を反映させるフィッティングによって、新たに推定された構成方程式を用いて再度弾塑性モデル解析を行い、解析結果から解析「真応力−公称ひずみ」曲線と解析「体積ひずみ−公称ひずみ」曲線を求め、解析値と実測値をそれぞれ比較し、一致したデータより真の「真応力−対数塑性ひずみ」曲線を構成方程式とする試みがされている。それを求める作業は7工程を経る工程の繰り返しを行っている。しかし、解析「体積ひずみ−公称ひずみ」曲線と「真応力−対数塑性ひずみ」曲線の両方を同時に決定することを試みるため、フィッティングの自由度が増加し、フィッティング試行回数は解析「体積ひずみ−公称ひずみ」曲線の試行錯誤回数g回と「真応力−対数塑性ひずみ」曲線の試行錯誤回数h回の掛け算(g×h回)と同程度となってしまい、収束解が得られにくい問題がある。その為に膨大な労力と時間を掛けて同定している問題があった。しかも、広い範囲の体積ひずみ実測値を扱うためにネッキング等の局部的な塑性領域を扱えず、フィッティングのターゲットが誤差の大きな実測値となり精度が低いものとなる。また、収束解を得るために繰り返し作業を減らすことも併せ、精度の低下を許容せざるを得なくなる問題があった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−337343号公報
【非特許文献】
【0007】
【非特許文献1】S. Kolling et al., 4th German LS-DYNA Users Conf.,A-II-27/57, 2005
【非特許文献2】P. A. Du Bois et al., 10th Int. LS-DYNA Users Conf.,19-35/42, 2008
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、運用する任意の材料構成則へ入力される機械特性を求めるに当たって、実材料の試験によって得られる「公称ひずみ−公称応力」関係、「変位−荷重」関係及び「真ひずみ−体積変化に関係するパラメータ」関係とその試験を模擬するシミュレーションによって得られるそれらの関係について、両者の一致性が高くなるように、機械特性を求める作業を容易に且つ早く行うこと。
【0009】
それらの一致性高い機械特性を求めるに当たって、実材料の試験方法をより微細な試験方法により塑性領域の測定精度を高める必要がある。
【課題を解決するための手段】
【0010】
本発明は、飛躍的に少ない思考錯誤の繰返しで材料構成則に入力する適正な機械特性を作成するシステムであって、適正な機械特性の作成に多大な労力が掛かる要因の一つが塑性に伴う体積変化に関係するパラメータの測定が困難であることに着目して、塑性の進行の大小をより微細に仕分けて扱う測定手法を用い「真ひずみ−体積変化に関係するパラメータ」関係を得る手段を有することと、要因の二つ目が複数の推定が直列的に関わるアルゴリズムであることに着目して仮の「真ひずみ−真応力(S-S)」関係の思考錯誤法プロセス1と仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係の思考錯誤法プロセス2を用い二つの推定を独立した回路を用いるアルゴリズムで行える手段を有することを特徴とするシステムであり、
詳細なアルゴリズムとして後に説明するステップ1からステップ10で構成される手段を有することを特徴とするシステムである。
体積変化に関係するパラメータはポアソン比、体積塑性ひずみ、塑性変形に伴うボイド率など様々あるが、以下の説明ではポアソン比を用いる。
【0011】
本発明によるシステムは、始めに運用する材料構成則を定めシミュレーションとの関係で必要な条件を設定する手段と、対象とする材料を用いて材料試験を行い、デジタル画像相関法等による微細な領域の塑性領域を含む精度の高い2次元ないし3次元変形データを取得し、縦ひずみ・横ひずみ・応力等データを取得し、「変位−荷重」関係(A1)及び「公称ひずみ−公称応力」関係(C1)に加え、塑性領域を含む「真ひずみ−見かけポアソン比」関係(B1)を得る手段(ステップ1)を有する。
【0012】
本発明によるシステムは、ステップ1によって得られたC1を、数2または数3を用いて、仮の「S−S」関係(A2)に変換する手段(ステップ2)を有する。
【0013】
本発明によるシステムは、ステップ1で設定された条件をA2に適用して、それを材料構成則に入力して材料試験を模擬するシミュレーションを行い、「変位−荷重」関係(A3-i, i=1, 2, …, 試行回数n)を得る手段(ステップ3-i, i=1, 2, …, 試行回数n)を有する。
【0014】
本発明によるシステムは、ステップ1で得られたA1とステップ3-iで得られたA3-iを比較し、得られた差が目標精度の範囲に入っているかを判定し、判定がYESとなった仮の「S−S」関係(A2又はA5-i)をA4と定義する手段(ステップ4-i, i=1, 2, …, 試行回数n)を有する。
【0015】
本発明によるシステムは、ステップ4-iよって得られた比較を参考に目標精度を上回るように推定し、仮の「S-S」関係(A5-i, i=2,3, …, 試行回数n)を作成する手段(ステップ5-i, i= 2,3, …, 試行回数n)を有する。
【0016】
本発明によるシステムは、ステップ4-iよってYESの判定が出るまでステップ5-iとステップ3-iとステップ4-iを繰返しで行う手段(仮の「S−S」関係推定の試行錯誤法思考錯誤法のプロセス)1を有する。
【0017】
本発明によるシステムは、ステップ1によって得られたB1を参考にして推定し、仮の「相当塑性ひずみ−塑性ポアソン比(S-P)」関係(B6)を作成する手段(ステップ6)を有する。
【0018】
本発明によるシステムは、ステップ4-i よって得られたA4をB6又はB10-j(j=2,3,…,試行回数m)に対応した真の「S-S」関係(A7-j, j=1, 2, …, 試行回数m)に数式を用いて変換する(ステップ7-j, j=1, 2, …, 試行回数m)手段を有する。変換に用いる数式は一軸引張り及び一軸圧縮の変換方程式の場合は数2、数4、数5、数6、数7、数8であり、二軸引張り、二軸圧縮の変換方程式の場合は数3、数6、数7、数8、数9、数10、数11、数12である。
【数4】
【数5】
【数6】
【数7】
【数8】
【数9】
【数10】
【数11】
【数12】
【0019】
本発明によるシステムは、A7-jとB6又はB10-jを材料構成則に入力して材料試験を模擬するシミュレーションを行い、「真ひずみ−見かけポアソン比」関係(B8-j, j=1, 2, …, 試行回数m)を得る手段(ステップ8-j, j=1, 2, …, 試行回数m)を有する。
【0020】
本発明によるシステムは、ステップ1よって得られた B1とステップ8-jで得られたB8-jを比較し得られた差が目標精度の範囲に入っているかを判定し、判定がYESとなった仮の「S−P」関係(B6またはB10-j)をB9と定義する手段(ステップ9-j, j=1, 2, …, 試行回数m)を有する。
【0021】
本発明によるシステムは、ステップ9-jよってYESの判定が出るまでステップ10-jとステップ7-jとステップ8-jとステップ9-jを思考錯誤法の繰返しを行う手段(仮の「S−P」関係の試行錯誤法プロセス)2を有する。
【0022】
本発明によるシステムは、ステップ6の工程で仮の「S−P」関係を既知のものと断定して設定する場合に、ステップ8‐j、ステップ9−jでの判定を省略してステップ9−jでB6をB9と定義する短絡プロセス3の手段を有する。
【0023】
本発明によるシステムは、以上の手段の構成により、材料構成則に入力する適正な機械特性A9とB9を出力する手段を有する。
【0024】
本発明によるシステムを体積変化に関係するパラメータをポアソン比を用いて説明したが、「真ひずみ−見かけポアソン比」関係及び「S−P」関係は、ステップ3-i、ステップ8-jで運用する材料構成則の入力に合わせて、体積変化に関係するパラメータ(体積塑性ひずみ、塑性変形に伴うボイド率など)に相関条件を与えて置き換えた関係を運用する手段を有する。
【発明の効果】
【0025】
本発明による直接的な効果は
一つに、体積変化に関係するパラメータを測定できる試験法を導入し、ネッキング状態の局部塑性を含む測定データから精度の高い比較基準「S−P」関係を得ることで、思考錯誤の回数が少なくても従来の手法より大幅に精度の高い機械特性を得ることが出来ることにある。
二つ目に、推定の試行錯誤の回路を二つに分けることでそれぞれの回路が短縮され、推定を容易にすることで試行錯誤の繰り返し数が減ることにある。
三つ目に、推定の試行錯誤の回路を二つに分け独立した試行錯誤をすることで、思考錯誤の繰返し回数は、二つの試行錯誤を同じ回路で行う場合の回数に対し大幅に少なくなることである。推定の容易さからg>n、h>mは明らかであり、試行錯誤の繰り返し回数は(g×h)>(n×m)>(n+m)、(ただし、g、h、m、nはすべて2以上)となる。
四つ目に、思考錯誤の繰り返しが削減されるため、遺伝的アルゴリズム等の導入による機械特性決定の自動化を促進できることにある。
五つ目に、弾性ひずみ増分および塑性ひずみ増分を直列結合する種類の弾塑性材料構成則すべてに適用できる汎用性があり、体積塑性ひずみ増分を0として金属材料構成則にも適用できることにある。
これらの総合効果は、幅広い種類の弾塑性材料構成則に適用でき、精度の高い機械特性を早く作成することができる。
【図面の簡単な説明】
【0026】
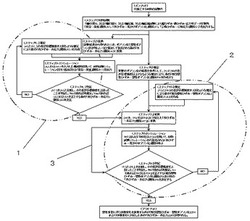
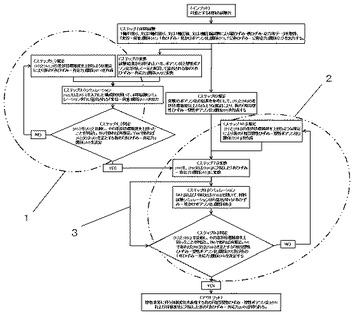
【図1】本発明によるシステムの具体的なアルゴリズムを示すフロー図である。
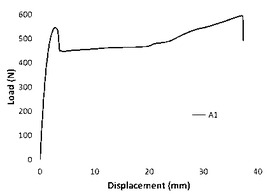
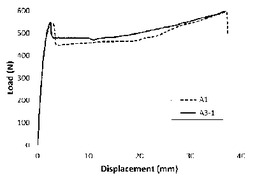
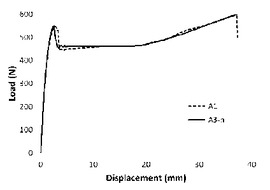
【図2】本発明による実施例ステップ1から得られた「変位−荷重」関係A1を示す。
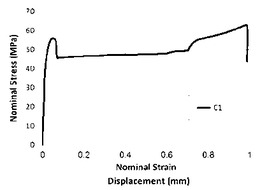
【図3】本発明による実施例ステップ1から得られた「公称ひずみ−公称応力」関係C1を示す。
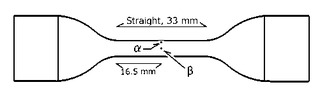
【図4】本発明による実施例ステップ1で使用したデジタル画像相関法における試験片上の見かけポアソン比の計測地点α点、β点の位置を示す。
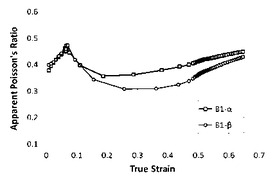
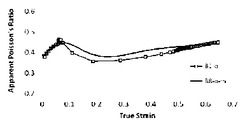
【図5】本発明による実施例ステップ1から得られた「真ひずみ−見かけポアソン比」関係(B1−α、B1−β)を示す。
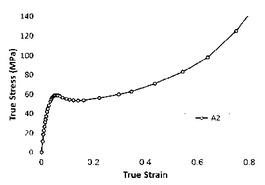
【図6】本発明による実施例ステップ2から得られた仮の「S-S」関係A2を示す。
【図7】本発明による実施例ステップ4‐1でNo判定された「変位−荷重」関係A3‐1とA1の比較を示す。
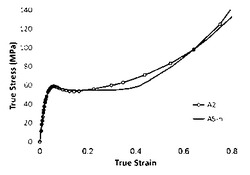
【図8】本発明による実施例ステップ5‐iをn-1回繰り返し試行錯誤して得られた仮の「S-S」関係A5‐nを示す。
【図9】本発明による実施例ステップ3‐nでYES判定が得られた「変位−荷重」関係A1とA3‐nの比較を示す。
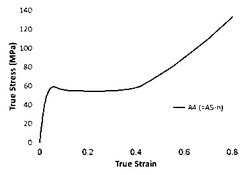
【図10】本発明による実施例ステップ4‐nでYES判定が得られた仮の「S-S」関係A5‐nを正とするA4を示す。
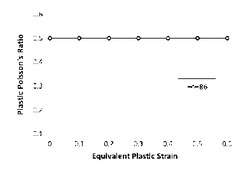
【図11】本発明による実施例ステップ6で作成した仮の「S-P」関係B6を示す。
【図12】本発明による実施例ステップ7-1から得られた、B6に対応した「S-S」関係A7‐1を示す。
【図13】本発明による実施例ステップ9-1でNo判定をされた「真ひずみ−見かけポアソン比」関係B8‐α‐1とB1‐αの比較を示す。
【図14】本発明による実施例ステップ9‐1でNo判定をされた「真ひずみ−見かけポアソン比」関係B8‐β‐1とB1‐βの比較を示す。
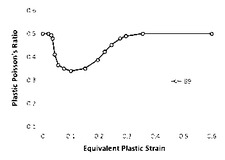
【図15】本発明による実施例ステップ10‐jをm-1回繰り返し試行錯誤して得られた仮の「S-P」関係B10‐mを示す。
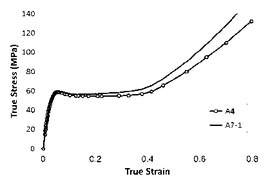
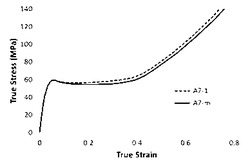
【図16】本発明による実施例ステップ7-mから得られた、B10-mに対応した「S-S」関係A7‐mを示す。また、A7−1との比較を合わせて示す。
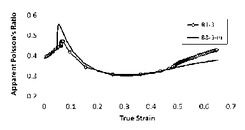
【図17】本発明による実施例ステップ9‐mでYES判定をされた「真ひずみ−見かけポアソン比」関係B8‐α‐mとB1‐αの比較を示す。
【図18】本発明による実施例ステップ9‐mでYES判定を得た「真ひずみ−見かけポアソン比」関係B8‐β−mとB1‐βの比較を示す。
【図19】本発明による実施例ステップ9‐mでYES判定を得たB10−mを正とするB9を示す。
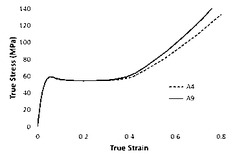
【図20】本発明による実施例ステップ9‐mでYES判定を得たA7−mを正とするA9を示す。また、A4との比較を合わせて示す。
【発明を実施するための形態】
【0027】
本発明を実施するための形態を図1に示すアルゴリズムのフローに沿って説明する。
本発明によるシステムは、初めに運用する材料構成則を定めシミュレーションとの関係で必要な相関条件を設定する。次に対象とする材料を用いてステップ1で、縦ひずみ・横ひずみ・応力等データを取得する。材料試験の方法は一軸引張り試験法、二軸引張り試験法、一軸圧縮試験法、二軸圧縮試験法の何れかを適用する事が出来る。全ひずみの縦横比を取得するためにデジタル画像相関法を用いた試験データから「変位−荷重」関係(A1)及び「真ひずみ−見かけポアソン比」関係(B1) 、「公称ひずみ−公称応力」関係(C1)を出力する。
【0028】
本発明によるシステムは、ステップ1から出力されたA1,B1を、A1を試行錯誤法プロセス1に運用し、B1を試行錯誤法プロセス2に運用する。
【0029】
本発明によるシステムは、ステップ2で、ポアソン比と塑性ポアソン比が等しく一定とみなした条件で、A1を仮の「S-S」関係(A2)に変換する。
【0030】
本発明によるシステムは、ステップ3-iで、ステップ1で設定された相関条件をA2に適用して、それを材料構成則に入力し、ステップ1の材料試験を模擬するシミュレーションを行い「変位−荷重」関係(A3-i)を得る。
【0031】
本発明によるシステムは、ステップ4-iで、ステップ3-iで得られたA3-iをステップ1で得られたA1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。目標精度は予め決められていても良いし、この段階で設定することもできる。
判定がYESを得たときA2を正とする仮の「S-S」関係(A4)を得る。
判定がNoであれば思考錯誤法のプロセス1を用いた推定と判定の繰返しを行う。
【0032】
本発明によるシステムは、ステップ4-iで判定がNoの場合にステップ4-iで比較されたA3-iを参考にして、ステップ5-iで改めて目標精度を上回るように推定した仮の「S-S」関係(A5-i)を作成する。
【0033】
本発明によるシステムは、改めてステップ3-iで、ステップ1で設定された条件をA5-iに適用して、それを材料構成則に入力して、実施した材料試験を模擬するシミュレーションを行い「変位−荷重」関係(A3-i)を得る。
【0034】
本発明によるシステムは、改めてステップ4-iで、シミュレーションで得られたA3‐iを材料試験で得られたA1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。
判定がYESを得たときにA2又はA5-iを正とする仮の「S-S」関係(A4)を得る。
判定がNoであれば試行錯誤法プロセス1を用いた推測と判定を繰返して行う。
【0035】
本発明によるシステムは、ステップ4-iでの判定がYESになるまで、ステップ5-i、ステップ3-i、ステップ4-iの試行錯誤法プロセス1を試行錯誤法で繰り返しn−1回行う。この試行錯誤は予めステップ5-1の工程でn-1個の推定を行いステップ4-1の工程でn-1個の「変位−荷重」関係を同時に比較し、最も誤差の少ない仮の「「S-S」関係(A4)を選択することもできる。思考錯誤の繰り返しを遺伝的アルゴリズム等により自動計算による判定を行い、A4を選択することも出来る。
【0036】
本発明によるシステムは、ステップ6で、ステップ1の出力B1を用いて仮の「S-P」関係(B6)推定する。B6を既知のものと断定して設定することも出来る。
【0037】
本発明によるシステムは、ステップ7-jで、B6を用いて仮の「S-S」関係A4を「S-S」関係 (A7-j)に変換する。仮の「S-P」関係(B6)が既知のものと断定して設定された場合は、「S-S」関係 (A7-j)に変換されたあと、B6とB7-jは短絡プロセス3でステップ8−jを省略してステップB9-jで処理される。
【0038】
本発明によるシステムは、ステップ8-jで、ステップ1で設定された相関条件をB6に適用してA7-jと共に材料構成則に入力して、材料実験を模擬するシミュレーションを行い「みかけポアソン比−真ひずみ」関係(B8-j)を出力する。
【0039】
本発明によるシステムは、ステップ9-jで、シミュレーションで得られたB8-jを、材料試験で得られたB1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。目標精度は予め決められていても良いし、この段階で設定することもできる。
判定がYESを得たときB6又はB10-jを正とする仮の「S-P」関係(B9)を得る。同時に、A7-jを正とするA9を得る。
判定がNoであれば試行錯誤法プロセス2を用いた推定と判定の繰返しを行う。
【0040】
本発明によるシステムは、ステップ9-jで判定がNoの場合にステップ8-jで比較されたB8-jを参考にして、ステップ10-jで改めて目標精度を上回るように推定した仮の「S-P」関係(B10-j)を作成する。
【0041】
本発明によるシステムは、改めてステップ7-jで、B10-jを用いて仮の「S-S」関係A4を「S-S」関係 (A7-j)に変換する。
【0042】
本発明によるシステムは、ステップ8-jで、ステップ1で設定された相関条件をB10-jに適用してA7-jと共に材料構成則に入力して、材料実験を模擬するシミュレーションを行い「みかけポアソン比−真ひずみ」関係(B8-j)を出力する。
【0043】
本発明によるシステムは、改めてステップ8-jで、シミュレーションで得られたB8-jを材料試験で得られたB1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。
判定がYESを得たときB10-jを正とする「S-P」関係(B9)を得る。同時に、A7を正とするA9を得る。
判定がNoであれば試行錯誤法プロセス2を用いた推定と判定を繰返して行う。
【0044】
本発明によるシステムは、ステップ9-jでの判定がYESになるまで、ステップ10-j、ステップ7-j、ステップ8-j、ステップ9-jのプロセス2を試行錯誤法で繰り返しm−1回行う。この試行錯誤は予めステップ10-1の工程でm−1個の推定を行いステップ9-1の工程でm−1個の「真ひずみ−見かけポアソン比」関係を同時に比較し、最も誤差の少ない「S-P」関係(B9)を選択することもできる。思考錯誤の繰り返しを遺伝的アルゴリズム等により自動計算による判定を行い、B9を選択することも出来る。同時に、A7-jを正とするA9を得る。
【0045】
本発明によるシステムは、ステップ9-jで、ステップ6で仮の「S-P」関係(B6)が既知のものと断定して設定された場合に、短絡プロセス3を経たB6とA7-1を正とするB9とA9を得る。
【0046】
以上の実施によって、材料構成則に必要な機械特性A9とB9が出力される。
【実施例】
【0047】
非晶性樹脂材料であるポリカーボネートは引張り試験においてクレイズを生じ、塑性中の体積変化を起すことが知られている。この材料を用いてS.Kollingらによって開発された材料構成則Semi-Anakytycal Model for Polymers with C1-differentiable yeald(以降SAMP‐1と呼ぶ)に用いる「S-S」曲線及び「S-P」曲線を求めた実施例を説明する。図2〜図20は各工程で得られた出力が示されている。
【0048】
ステップ1で、運用する材料構成則をSAMP1と設定した。
本実施例で扱う樹脂用材料構成則SAMP-1は非関連塑性構成式で記述される(非特許文献1)。数10に降伏関数 f 、数7に塑性ポテンシャルgを示す.数10に示す係数は、3種類の静的材料試験結果から決定する。例えば、引張・圧縮・せん断特性の「真応力−塑性ひずみ」曲線を入力することで、それら係数は決まる。塑性ポアソン比は体積塑性ひずみ増分を決定するパラメータである。例えば、1軸引張状態では、体積塑性ひずみ増分は数12のように比例する。塑性ポアソン比が 0.5 の場合は体積ひずみ増分が0となり、つまり塑性変形は非圧縮性となる。一方、塑性ポアソン比が0より大きく0.5より小さい場合は体積ひずみ分が0 より大きくなるため、塑性変形に伴い体積は変化する.クレイズ現象のボイド拡張は、この材料構成則では、塑性ポアソン比によって表現することが可能である。
従って、シミュレーションとの関係する相関条件は、仮の「真ひずみ−真応力」関係と仮の「相当塑性ひずみー塑性ポアソン比」をダイレクトに入力する条件とする。
【数13】
【数14】
【0049】
ステップ1で、静的引張試験(JISK7113-2準拠、引張速度5mm/min)を実施し、「変位−荷重」関係A1(図2)および「公称ひずみ−公称応力」関係C1(図3)を得た。また同時に、デジタル画像相関法を用いて、(図4)に示す試験片中央付近における縦ひずみ、および横ひずみを測定し、「真ひずみ−見かけポアソン比」関係(B1−α、B1−β)(図5)を得た。
【0050】
ステップ2の工程の実施により仮の「S-S」関係A2(図6)を得た。
【0051】
ステップ3-1の工程実施によりシミュレーションによる「変位−荷重」関係A3-1を得て、ステップ4-1の工程実施によりステップ1の試験による「変位−荷重」関係A1との比較(図7)からNoの判定を得た。
【0052】
ステップ5-iの工程を24回実施し、仮の「S-S」関係A5-n,(n=24)(図8)を再度推定した
【0053】
試行錯誤のプロセス1を24回繰返し思考錯誤の結果YESの判定を得た「荷重−ひずみ」関係A3-n(n=24)(図9)を得た。同時にYES判定によって正とした仮の「S-S」関係A5-n,(n=24)(図10)が得られた。A5-nは判定後A4と呼ぶ。
【0054】
ステップ6の工程を実施。塑性ポアソン比を0.5一定とする「S-P」関係B6(図11)を作成した。
【0055】
ステップ7-1の工程の実施し、塑性ポアソン比とポアソン比が一定時における仮の「S-S」関係A4を変換して、B6対応した「S-S」関係A7-1(図12)を得た。
【0056】
ステップ9-1の工程にて、ステップ8-1の工程を実施しシミュレーションによって得られた「見かけのポアソン比−真ひずみ」関係(B8-α-1)が、ステップ1の試験によって得られた「見かけのポアソン比−真ひずみ」関係(B1-α)に比較され(図13)、併せてステップ8-1の工程を実施し、シミュレーションによって得られた(B8-β-1)が、ステップ9-1の工程にて、ステップ1の試験によって得られた(B1-β)に比較され(図14)No判定となった。
【0057】
ステップ9-1の工程のNo判定を受けて、試行錯誤のプロセス2を19回繰り返し実施され、ステップ10-m,(m=19)の工程の実施で推定された仮の「S-P」関係B10-m,(m=19)(図15)が得られた。
【0058】
プロセス2の試行錯誤が19回行われ、ステップ9-m(m=19)の工程で「真ひずみ−見かけポアソン比」関係B8-α-mがB1-αと比較され(図16)、B8-1-βがB1-βと比較され(図17)YESの判定を行い、仮の「S-P」関係(B10-m)が真の「S-P」関係として得られた。B10-mは判定後B9と呼ぶ。併せてB9に対応する「S-S」関係がA9(図18)として得られた。
【0059】
本実施例で得られた「S-S」関係の精度は「変位−荷重」関係において、目標誤差5%に対して 1%以内、部分的には3%以内の結果が得られた。
従来手法の誤差30%を大幅に上回る成果を得た。
【0060】
繰返し回数が実際に43回行われ、推定される従来手法457回以上に対して非常に少ない回数で必要とする機械特性を作成することが出来た。
【産業上の利用可能性】
【0061】
本発明が産業に寄与する効果として、樹脂材料や発泡金属など塑性に伴う体積変化を高精度に表現・再現する機械特性を、経験豊富な専門家でなくても作成できるようになる事である。高精度な機械特性作成の敷居が低くなった事により、高精度な機械特性を用いたシミュレーションの運用を幅広くエンジニアリングに広げることを期待できる。
【符号の説明】
【0062】
1 : 仮の「真ひずみ−真応力」関係推定の試行錯誤法プロセス
2 : 仮の「相当塑性ひずみ−塑性ポアソン比」関係の試行錯誤法プロセス
3 : 仮の「相当塑性ひずみ−塑性ポアソン比」関係を既知のものと断定して設定した場合の短絡プロセス
【技術分野】
【0001】
本発明は、弾性領域の機械特性測定に加え、測定範囲に塑性領域を含めた「真ひずみ−体積変化に関係するパラメータ」関係をデジタル画像相関法等により求め、それらの結果を利用して、各種材料の機械特性「公称ひずみ−公称応力」関係から、弾性ひずみ増分および塑性ひずみ増分を直列結合する種類の弾塑性材料構成則(以下、材料構成則)に入力する機械特性を求めるシステムに関するものである。
【背景技術】
【0002】
有限要素法によるシミュレーション(以下、シミュレーション)において、ある材料の塑性変形挙動を表現するには、その機械特性を入力することが必要である。
【0003】
多くの材料構成則では弾性ひずみと塑性ひずみは直列結合することを仮定して定式化され、材料の塑性変形挙動は表現される。ここで、体積変化に関係するパラメータをポアソン比でとらえて注意する。ポアソン比は弾性ひずみに対して適用される物理量であり、塑性ひずみには適用されないことに注意する。金属材料の場合、塑性変形はせん断変形であるため、体積塑性ひずみ増分が0となるような塑性ひずみ増分(テンソル量)が決定される。便宜上、塑性ひずみ増分の縦横比(数1)を塑性ポアソン比と定義すれば、金属材料の場合、塑性ポアソン比は0.5と考えることが可能である。一方、樹脂材料の引張変形においては、体積が膨張する現象が観察される。塑性ポアソン比が塑性変形量によって変化すると仮定することで、この現象を表現する手法が提案されている(非特許文献1)。
【数1】
【0004】
従来、「真ひずみ−真応力」関係は「公称ひずみ−公称応力」関係とポアソン比から見積もられてきた(数2、数3)。ここで、数2は一軸引張り、一軸圧縮の変換式、数3は二軸引張り、二軸圧縮の変換式である。しかし、この見積もり方法では、塑性ポアソン比を考慮していないため、塑性変形に伴う体積変化を高精度に表現することは出来ない。このため、例えば座屈挙動(非特許文献2)等、部品同士の接触・変形で解が分岐する繊細な問題では、部品の体積変化に伴う変形も考慮に入れなければ、実現象と異なる接触が誘発される恐れがあり、結果として、樹脂材料部品の複雑な変形挙動をシミュレーションで再現できない問題が起きる。
【数2】
【数3】
【0005】
例えば、特許文献1においてはボイドが誘発される塑性域の曲線、すなわち「真応力−対数塑性ひずみ」曲線の降伏後の曲線に任意の傾きを加えて、ボイド発生の効果を反映させるフィッティングによって、新たに推定された構成方程式を用いて再度弾塑性モデル解析を行い、解析結果から解析「真応力−公称ひずみ」曲線と解析「体積ひずみ−公称ひずみ」曲線を求め、解析値と実測値をそれぞれ比較し、一致したデータより真の「真応力−対数塑性ひずみ」曲線を構成方程式とする試みがされている。それを求める作業は7工程を経る工程の繰り返しを行っている。しかし、解析「体積ひずみ−公称ひずみ」曲線と「真応力−対数塑性ひずみ」曲線の両方を同時に決定することを試みるため、フィッティングの自由度が増加し、フィッティング試行回数は解析「体積ひずみ−公称ひずみ」曲線の試行錯誤回数g回と「真応力−対数塑性ひずみ」曲線の試行錯誤回数h回の掛け算(g×h回)と同程度となってしまい、収束解が得られにくい問題がある。その為に膨大な労力と時間を掛けて同定している問題があった。しかも、広い範囲の体積ひずみ実測値を扱うためにネッキング等の局部的な塑性領域を扱えず、フィッティングのターゲットが誤差の大きな実測値となり精度が低いものとなる。また、収束解を得るために繰り返し作業を減らすことも併せ、精度の低下を許容せざるを得なくなる問題があった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−337343号公報
【非特許文献】
【0007】
【非特許文献1】S. Kolling et al., 4th German LS-DYNA Users Conf.,A-II-27/57, 2005
【非特許文献2】P. A. Du Bois et al., 10th Int. LS-DYNA Users Conf.,19-35/42, 2008
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、運用する任意の材料構成則へ入力される機械特性を求めるに当たって、実材料の試験によって得られる「公称ひずみ−公称応力」関係、「変位−荷重」関係及び「真ひずみ−体積変化に関係するパラメータ」関係とその試験を模擬するシミュレーションによって得られるそれらの関係について、両者の一致性が高くなるように、機械特性を求める作業を容易に且つ早く行うこと。
【0009】
それらの一致性高い機械特性を求めるに当たって、実材料の試験方法をより微細な試験方法により塑性領域の測定精度を高める必要がある。
【課題を解決するための手段】
【0010】
本発明は、飛躍的に少ない思考錯誤の繰返しで材料構成則に入力する適正な機械特性を作成するシステムであって、適正な機械特性の作成に多大な労力が掛かる要因の一つが塑性に伴う体積変化に関係するパラメータの測定が困難であることに着目して、塑性の進行の大小をより微細に仕分けて扱う測定手法を用い「真ひずみ−体積変化に関係するパラメータ」関係を得る手段を有することと、要因の二つ目が複数の推定が直列的に関わるアルゴリズムであることに着目して仮の「真ひずみ−真応力(S-S)」関係の思考錯誤法プロセス1と仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係の思考錯誤法プロセス2を用い二つの推定を独立した回路を用いるアルゴリズムで行える手段を有することを特徴とするシステムであり、
詳細なアルゴリズムとして後に説明するステップ1からステップ10で構成される手段を有することを特徴とするシステムである。
体積変化に関係するパラメータはポアソン比、体積塑性ひずみ、塑性変形に伴うボイド率など様々あるが、以下の説明ではポアソン比を用いる。
【0011】
本発明によるシステムは、始めに運用する材料構成則を定めシミュレーションとの関係で必要な条件を設定する手段と、対象とする材料を用いて材料試験を行い、デジタル画像相関法等による微細な領域の塑性領域を含む精度の高い2次元ないし3次元変形データを取得し、縦ひずみ・横ひずみ・応力等データを取得し、「変位−荷重」関係(A1)及び「公称ひずみ−公称応力」関係(C1)に加え、塑性領域を含む「真ひずみ−見かけポアソン比」関係(B1)を得る手段(ステップ1)を有する。
【0012】
本発明によるシステムは、ステップ1によって得られたC1を、数2または数3を用いて、仮の「S−S」関係(A2)に変換する手段(ステップ2)を有する。
【0013】
本発明によるシステムは、ステップ1で設定された条件をA2に適用して、それを材料構成則に入力して材料試験を模擬するシミュレーションを行い、「変位−荷重」関係(A3-i, i=1, 2, …, 試行回数n)を得る手段(ステップ3-i, i=1, 2, …, 試行回数n)を有する。
【0014】
本発明によるシステムは、ステップ1で得られたA1とステップ3-iで得られたA3-iを比較し、得られた差が目標精度の範囲に入っているかを判定し、判定がYESとなった仮の「S−S」関係(A2又はA5-i)をA4と定義する手段(ステップ4-i, i=1, 2, …, 試行回数n)を有する。
【0015】
本発明によるシステムは、ステップ4-iよって得られた比較を参考に目標精度を上回るように推定し、仮の「S-S」関係(A5-i, i=2,3, …, 試行回数n)を作成する手段(ステップ5-i, i= 2,3, …, 試行回数n)を有する。
【0016】
本発明によるシステムは、ステップ4-iよってYESの判定が出るまでステップ5-iとステップ3-iとステップ4-iを繰返しで行う手段(仮の「S−S」関係推定の試行錯誤法思考錯誤法のプロセス)1を有する。
【0017】
本発明によるシステムは、ステップ1によって得られたB1を参考にして推定し、仮の「相当塑性ひずみ−塑性ポアソン比(S-P)」関係(B6)を作成する手段(ステップ6)を有する。
【0018】
本発明によるシステムは、ステップ4-i よって得られたA4をB6又はB10-j(j=2,3,…,試行回数m)に対応した真の「S-S」関係(A7-j, j=1, 2, …, 試行回数m)に数式を用いて変換する(ステップ7-j, j=1, 2, …, 試行回数m)手段を有する。変換に用いる数式は一軸引張り及び一軸圧縮の変換方程式の場合は数2、数4、数5、数6、数7、数8であり、二軸引張り、二軸圧縮の変換方程式の場合は数3、数6、数7、数8、数9、数10、数11、数12である。
【数4】
【数5】
【数6】
【数7】
【数8】
【数9】
【数10】
【数11】
【数12】
【0019】
本発明によるシステムは、A7-jとB6又はB10-jを材料構成則に入力して材料試験を模擬するシミュレーションを行い、「真ひずみ−見かけポアソン比」関係(B8-j, j=1, 2, …, 試行回数m)を得る手段(ステップ8-j, j=1, 2, …, 試行回数m)を有する。
【0020】
本発明によるシステムは、ステップ1よって得られた B1とステップ8-jで得られたB8-jを比較し得られた差が目標精度の範囲に入っているかを判定し、判定がYESとなった仮の「S−P」関係(B6またはB10-j)をB9と定義する手段(ステップ9-j, j=1, 2, …, 試行回数m)を有する。
【0021】
本発明によるシステムは、ステップ9-jよってYESの判定が出るまでステップ10-jとステップ7-jとステップ8-jとステップ9-jを思考錯誤法の繰返しを行う手段(仮の「S−P」関係の試行錯誤法プロセス)2を有する。
【0022】
本発明によるシステムは、ステップ6の工程で仮の「S−P」関係を既知のものと断定して設定する場合に、ステップ8‐j、ステップ9−jでの判定を省略してステップ9−jでB6をB9と定義する短絡プロセス3の手段を有する。
【0023】
本発明によるシステムは、以上の手段の構成により、材料構成則に入力する適正な機械特性A9とB9を出力する手段を有する。
【0024】
本発明によるシステムを体積変化に関係するパラメータをポアソン比を用いて説明したが、「真ひずみ−見かけポアソン比」関係及び「S−P」関係は、ステップ3-i、ステップ8-jで運用する材料構成則の入力に合わせて、体積変化に関係するパラメータ(体積塑性ひずみ、塑性変形に伴うボイド率など)に相関条件を与えて置き換えた関係を運用する手段を有する。
【発明の効果】
【0025】
本発明による直接的な効果は
一つに、体積変化に関係するパラメータを測定できる試験法を導入し、ネッキング状態の局部塑性を含む測定データから精度の高い比較基準「S−P」関係を得ることで、思考錯誤の回数が少なくても従来の手法より大幅に精度の高い機械特性を得ることが出来ることにある。
二つ目に、推定の試行錯誤の回路を二つに分けることでそれぞれの回路が短縮され、推定を容易にすることで試行錯誤の繰り返し数が減ることにある。
三つ目に、推定の試行錯誤の回路を二つに分け独立した試行錯誤をすることで、思考錯誤の繰返し回数は、二つの試行錯誤を同じ回路で行う場合の回数に対し大幅に少なくなることである。推定の容易さからg>n、h>mは明らかであり、試行錯誤の繰り返し回数は(g×h)>(n×m)>(n+m)、(ただし、g、h、m、nはすべて2以上)となる。
四つ目に、思考錯誤の繰り返しが削減されるため、遺伝的アルゴリズム等の導入による機械特性決定の自動化を促進できることにある。
五つ目に、弾性ひずみ増分および塑性ひずみ増分を直列結合する種類の弾塑性材料構成則すべてに適用できる汎用性があり、体積塑性ひずみ増分を0として金属材料構成則にも適用できることにある。
これらの総合効果は、幅広い種類の弾塑性材料構成則に適用でき、精度の高い機械特性を早く作成することができる。
【図面の簡単な説明】
【0026】
【図1】本発明によるシステムの具体的なアルゴリズムを示すフロー図である。
【図2】本発明による実施例ステップ1から得られた「変位−荷重」関係A1を示す。
【図3】本発明による実施例ステップ1から得られた「公称ひずみ−公称応力」関係C1を示す。
【図4】本発明による実施例ステップ1で使用したデジタル画像相関法における試験片上の見かけポアソン比の計測地点α点、β点の位置を示す。
【図5】本発明による実施例ステップ1から得られた「真ひずみ−見かけポアソン比」関係(B1−α、B1−β)を示す。
【図6】本発明による実施例ステップ2から得られた仮の「S-S」関係A2を示す。
【図7】本発明による実施例ステップ4‐1でNo判定された「変位−荷重」関係A3‐1とA1の比較を示す。
【図8】本発明による実施例ステップ5‐iをn-1回繰り返し試行錯誤して得られた仮の「S-S」関係A5‐nを示す。
【図9】本発明による実施例ステップ3‐nでYES判定が得られた「変位−荷重」関係A1とA3‐nの比較を示す。
【図10】本発明による実施例ステップ4‐nでYES判定が得られた仮の「S-S」関係A5‐nを正とするA4を示す。
【図11】本発明による実施例ステップ6で作成した仮の「S-P」関係B6を示す。
【図12】本発明による実施例ステップ7-1から得られた、B6に対応した「S-S」関係A7‐1を示す。
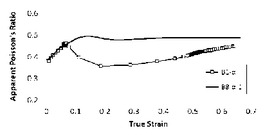
【図13】本発明による実施例ステップ9-1でNo判定をされた「真ひずみ−見かけポアソン比」関係B8‐α‐1とB1‐αの比較を示す。
【図14】本発明による実施例ステップ9‐1でNo判定をされた「真ひずみ−見かけポアソン比」関係B8‐β‐1とB1‐βの比較を示す。
【図15】本発明による実施例ステップ10‐jをm-1回繰り返し試行錯誤して得られた仮の「S-P」関係B10‐mを示す。
【図16】本発明による実施例ステップ7-mから得られた、B10-mに対応した「S-S」関係A7‐mを示す。また、A7−1との比較を合わせて示す。
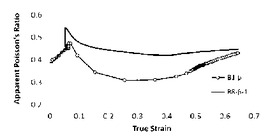
【図17】本発明による実施例ステップ9‐mでYES判定をされた「真ひずみ−見かけポアソン比」関係B8‐α‐mとB1‐αの比較を示す。
【図18】本発明による実施例ステップ9‐mでYES判定を得た「真ひずみ−見かけポアソン比」関係B8‐β−mとB1‐βの比較を示す。
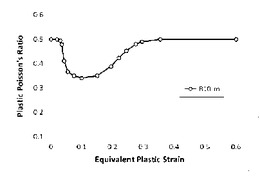
【図19】本発明による実施例ステップ9‐mでYES判定を得たB10−mを正とするB9を示す。
【図20】本発明による実施例ステップ9‐mでYES判定を得たA7−mを正とするA9を示す。また、A4との比較を合わせて示す。
【発明を実施するための形態】
【0027】
本発明を実施するための形態を図1に示すアルゴリズムのフローに沿って説明する。
本発明によるシステムは、初めに運用する材料構成則を定めシミュレーションとの関係で必要な相関条件を設定する。次に対象とする材料を用いてステップ1で、縦ひずみ・横ひずみ・応力等データを取得する。材料試験の方法は一軸引張り試験法、二軸引張り試験法、一軸圧縮試験法、二軸圧縮試験法の何れかを適用する事が出来る。全ひずみの縦横比を取得するためにデジタル画像相関法を用いた試験データから「変位−荷重」関係(A1)及び「真ひずみ−見かけポアソン比」関係(B1) 、「公称ひずみ−公称応力」関係(C1)を出力する。
【0028】
本発明によるシステムは、ステップ1から出力されたA1,B1を、A1を試行錯誤法プロセス1に運用し、B1を試行錯誤法プロセス2に運用する。
【0029】
本発明によるシステムは、ステップ2で、ポアソン比と塑性ポアソン比が等しく一定とみなした条件で、A1を仮の「S-S」関係(A2)に変換する。
【0030】
本発明によるシステムは、ステップ3-iで、ステップ1で設定された相関条件をA2に適用して、それを材料構成則に入力し、ステップ1の材料試験を模擬するシミュレーションを行い「変位−荷重」関係(A3-i)を得る。
【0031】
本発明によるシステムは、ステップ4-iで、ステップ3-iで得られたA3-iをステップ1で得られたA1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。目標精度は予め決められていても良いし、この段階で設定することもできる。
判定がYESを得たときA2を正とする仮の「S-S」関係(A4)を得る。
判定がNoであれば思考錯誤法のプロセス1を用いた推定と判定の繰返しを行う。
【0032】
本発明によるシステムは、ステップ4-iで判定がNoの場合にステップ4-iで比較されたA3-iを参考にして、ステップ5-iで改めて目標精度を上回るように推定した仮の「S-S」関係(A5-i)を作成する。
【0033】
本発明によるシステムは、改めてステップ3-iで、ステップ1で設定された条件をA5-iに適用して、それを材料構成則に入力して、実施した材料試験を模擬するシミュレーションを行い「変位−荷重」関係(A3-i)を得る。
【0034】
本発明によるシステムは、改めてステップ4-iで、シミュレーションで得られたA3‐iを材料試験で得られたA1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。
判定がYESを得たときにA2又はA5-iを正とする仮の「S-S」関係(A4)を得る。
判定がNoであれば試行錯誤法プロセス1を用いた推測と判定を繰返して行う。
【0035】
本発明によるシステムは、ステップ4-iでの判定がYESになるまで、ステップ5-i、ステップ3-i、ステップ4-iの試行錯誤法プロセス1を試行錯誤法で繰り返しn−1回行う。この試行錯誤は予めステップ5-1の工程でn-1個の推定を行いステップ4-1の工程でn-1個の「変位−荷重」関係を同時に比較し、最も誤差の少ない仮の「「S-S」関係(A4)を選択することもできる。思考錯誤の繰り返しを遺伝的アルゴリズム等により自動計算による判定を行い、A4を選択することも出来る。
【0036】
本発明によるシステムは、ステップ6で、ステップ1の出力B1を用いて仮の「S-P」関係(B6)推定する。B6を既知のものと断定して設定することも出来る。
【0037】
本発明によるシステムは、ステップ7-jで、B6を用いて仮の「S-S」関係A4を「S-S」関係 (A7-j)に変換する。仮の「S-P」関係(B6)が既知のものと断定して設定された場合は、「S-S」関係 (A7-j)に変換されたあと、B6とB7-jは短絡プロセス3でステップ8−jを省略してステップB9-jで処理される。
【0038】
本発明によるシステムは、ステップ8-jで、ステップ1で設定された相関条件をB6に適用してA7-jと共に材料構成則に入力して、材料実験を模擬するシミュレーションを行い「みかけポアソン比−真ひずみ」関係(B8-j)を出力する。
【0039】
本発明によるシステムは、ステップ9-jで、シミュレーションで得られたB8-jを、材料試験で得られたB1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。目標精度は予め決められていても良いし、この段階で設定することもできる。
判定がYESを得たときB6又はB10-jを正とする仮の「S-P」関係(B9)を得る。同時に、A7-jを正とするA9を得る。
判定がNoであれば試行錯誤法プロセス2を用いた推定と判定の繰返しを行う。
【0040】
本発明によるシステムは、ステップ9-jで判定がNoの場合にステップ8-jで比較されたB8-jを参考にして、ステップ10-jで改めて目標精度を上回るように推定した仮の「S-P」関係(B10-j)を作成する。
【0041】
本発明によるシステムは、改めてステップ7-jで、B10-jを用いて仮の「S-S」関係A4を「S-S」関係 (A7-j)に変換する。
【0042】
本発明によるシステムは、ステップ8-jで、ステップ1で設定された相関条件をB10-jに適用してA7-jと共に材料構成則に入力して、材料実験を模擬するシミュレーションを行い「みかけポアソン比−真ひずみ」関係(B8-j)を出力する。
【0043】
本発明によるシステムは、改めてステップ8-jで、シミュレーションで得られたB8-jを材料試験で得られたB1と比較して得られた差が目標精度の許容誤差に対して同じ又は小さい場合にYESの判定をする。比較して得られた差が目標精度の許容誤差より大きい場合にNOの判定をする。
判定がYESを得たときB10-jを正とする「S-P」関係(B9)を得る。同時に、A7を正とするA9を得る。
判定がNoであれば試行錯誤法プロセス2を用いた推定と判定を繰返して行う。
【0044】
本発明によるシステムは、ステップ9-jでの判定がYESになるまで、ステップ10-j、ステップ7-j、ステップ8-j、ステップ9-jのプロセス2を試行錯誤法で繰り返しm−1回行う。この試行錯誤は予めステップ10-1の工程でm−1個の推定を行いステップ9-1の工程でm−1個の「真ひずみ−見かけポアソン比」関係を同時に比較し、最も誤差の少ない「S-P」関係(B9)を選択することもできる。思考錯誤の繰り返しを遺伝的アルゴリズム等により自動計算による判定を行い、B9を選択することも出来る。同時に、A7-jを正とするA9を得る。
【0045】
本発明によるシステムは、ステップ9-jで、ステップ6で仮の「S-P」関係(B6)が既知のものと断定して設定された場合に、短絡プロセス3を経たB6とA7-1を正とするB9とA9を得る。
【0046】
以上の実施によって、材料構成則に必要な機械特性A9とB9が出力される。
【実施例】
【0047】
非晶性樹脂材料であるポリカーボネートは引張り試験においてクレイズを生じ、塑性中の体積変化を起すことが知られている。この材料を用いてS.Kollingらによって開発された材料構成則Semi-Anakytycal Model for Polymers with C1-differentiable yeald(以降SAMP‐1と呼ぶ)に用いる「S-S」曲線及び「S-P」曲線を求めた実施例を説明する。図2〜図20は各工程で得られた出力が示されている。
【0048】
ステップ1で、運用する材料構成則をSAMP1と設定した。
本実施例で扱う樹脂用材料構成則SAMP-1は非関連塑性構成式で記述される(非特許文献1)。数10に降伏関数 f 、数7に塑性ポテンシャルgを示す.数10に示す係数は、3種類の静的材料試験結果から決定する。例えば、引張・圧縮・せん断特性の「真応力−塑性ひずみ」曲線を入力することで、それら係数は決まる。塑性ポアソン比は体積塑性ひずみ増分を決定するパラメータである。例えば、1軸引張状態では、体積塑性ひずみ増分は数12のように比例する。塑性ポアソン比が 0.5 の場合は体積ひずみ増分が0となり、つまり塑性変形は非圧縮性となる。一方、塑性ポアソン比が0より大きく0.5より小さい場合は体積ひずみ分が0 より大きくなるため、塑性変形に伴い体積は変化する.クレイズ現象のボイド拡張は、この材料構成則では、塑性ポアソン比によって表現することが可能である。
従って、シミュレーションとの関係する相関条件は、仮の「真ひずみ−真応力」関係と仮の「相当塑性ひずみー塑性ポアソン比」をダイレクトに入力する条件とする。
【数13】
【数14】
【0049】
ステップ1で、静的引張試験(JISK7113-2準拠、引張速度5mm/min)を実施し、「変位−荷重」関係A1(図2)および「公称ひずみ−公称応力」関係C1(図3)を得た。また同時に、デジタル画像相関法を用いて、(図4)に示す試験片中央付近における縦ひずみ、および横ひずみを測定し、「真ひずみ−見かけポアソン比」関係(B1−α、B1−β)(図5)を得た。
【0050】
ステップ2の工程の実施により仮の「S-S」関係A2(図6)を得た。
【0051】
ステップ3-1の工程実施によりシミュレーションによる「変位−荷重」関係A3-1を得て、ステップ4-1の工程実施によりステップ1の試験による「変位−荷重」関係A1との比較(図7)からNoの判定を得た。
【0052】
ステップ5-iの工程を24回実施し、仮の「S-S」関係A5-n,(n=24)(図8)を再度推定した
【0053】
試行錯誤のプロセス1を24回繰返し思考錯誤の結果YESの判定を得た「荷重−ひずみ」関係A3-n(n=24)(図9)を得た。同時にYES判定によって正とした仮の「S-S」関係A5-n,(n=24)(図10)が得られた。A5-nは判定後A4と呼ぶ。
【0054】
ステップ6の工程を実施。塑性ポアソン比を0.5一定とする「S-P」関係B6(図11)を作成した。
【0055】
ステップ7-1の工程の実施し、塑性ポアソン比とポアソン比が一定時における仮の「S-S」関係A4を変換して、B6対応した「S-S」関係A7-1(図12)を得た。
【0056】
ステップ9-1の工程にて、ステップ8-1の工程を実施しシミュレーションによって得られた「見かけのポアソン比−真ひずみ」関係(B8-α-1)が、ステップ1の試験によって得られた「見かけのポアソン比−真ひずみ」関係(B1-α)に比較され(図13)、併せてステップ8-1の工程を実施し、シミュレーションによって得られた(B8-β-1)が、ステップ9-1の工程にて、ステップ1の試験によって得られた(B1-β)に比較され(図14)No判定となった。
【0057】
ステップ9-1の工程のNo判定を受けて、試行錯誤のプロセス2を19回繰り返し実施され、ステップ10-m,(m=19)の工程の実施で推定された仮の「S-P」関係B10-m,(m=19)(図15)が得られた。
【0058】
プロセス2の試行錯誤が19回行われ、ステップ9-m(m=19)の工程で「真ひずみ−見かけポアソン比」関係B8-α-mがB1-αと比較され(図16)、B8-1-βがB1-βと比較され(図17)YESの判定を行い、仮の「S-P」関係(B10-m)が真の「S-P」関係として得られた。B10-mは判定後B9と呼ぶ。併せてB9に対応する「S-S」関係がA9(図18)として得られた。
【0059】
本実施例で得られた「S-S」関係の精度は「変位−荷重」関係において、目標誤差5%に対して 1%以内、部分的には3%以内の結果が得られた。
従来手法の誤差30%を大幅に上回る成果を得た。
【0060】
繰返し回数が実際に43回行われ、推定される従来手法457回以上に対して非常に少ない回数で必要とする機械特性を作成することが出来た。
【産業上の利用可能性】
【0061】
本発明が産業に寄与する効果として、樹脂材料や発泡金属など塑性に伴う体積変化を高精度に表現・再現する機械特性を、経験豊富な専門家でなくても作成できるようになる事である。高精度な機械特性作成の敷居が低くなった事により、高精度な機械特性を用いたシミュレーションの運用を幅広くエンジニアリングに広げることを期待できる。
【符号の説明】
【0062】
1 : 仮の「真ひずみ−真応力」関係推定の試行錯誤法プロセス
2 : 仮の「相当塑性ひずみ−塑性ポアソン比」関係の試行錯誤法プロセス
3 : 仮の「相当塑性ひずみ−塑性ポアソン比」関係を既知のものと断定して設定した場合の短絡プロセス
【特許請求の範囲】
【請求項1】
有限要素法等シミュレーションに用いる機械特性を求めるシステムにおいて、塑性ポアソン比がポアソン比と異なる材料からなる構造体の「真ひずみ−真応力」関係と「相当塑性ひずみ−運用するところの材料構成則に応じた塑性に伴う体積変化に関係するパラメータ」関係を作成するシステムであって、材料引張試験又は圧縮試験で「変位−荷重」関係および「公称ひずみ−公称応力」関係とともに「真ひずみ−体積変化に関係するパラメータ」関係を測定によって得て、その試験を模擬するシミュレーションによって「変位−荷重」関係と「真ひずみ−体積変化に関係するパラメータ」関係を得て、両者の一致性を判定して材料構成則へ入力される機械特性を作成する方法で、少なくとも「真ひずみ−体積変化に関係するパラメータ」関係を測定によって得て、その試験を模擬するシミュレーションによって「真ひずみ−体積変化に関係するパラメータ」関係を得て、両者の一致性を判定する手段を含むことを特徴とするシステム。
【請求項2】
請求項1に記載のシステムにおいて、「真ひずみ−体積変化に関係するパラメータ」関係を得るために、デジタル画像相関法等による試験片の微細な領域の塑性の変化の全塑性領域を2次元ないし3次元変形データで取得する手段を有することを特徴とするシステム。
【請求項3】
請求項1に記載のシステムにおいて、仮の「真ひずみ−真応力」関係を推定し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「変位−荷重」関係と材料引張試験又は圧縮試験で得た「変位−荷重」関係の一致性を判定する手段と、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を推定し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「真ひずみ−体積変化に関係するパラメータ」関係と材料引張試験又は圧縮試験で得た「真ひずみ−体積変化に関係するパラメータ」関係の一致性を判定する手段を有し、それぞれが独立して思考錯誤法を繰り返して適正なそれぞれの関係を見出すことを特徴とするシステム。
【請求項4】
請求項3に記載のシステムにおいて、塑性に伴う体積変化に関係するパラメータが弾性変形時と等価で変化の無い物として仮の「真ひずみ−真応力」関係を作成することを特徴とするシステム。
【請求項5】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係を体積変化に関係するパラメータから推定した仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係に対応した真の「真ひずみ−真応力」関係を作成することを特徴とするシステム。
【請求項6】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係を複数推定しそれらを同時に比較し最適な関係を選択し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「変位−荷重」関係と材料引張試験又は圧縮試験で得た「変位−荷重」関係の一致性を判断する手段を有し、試行錯誤法プロセス1の思考錯誤法を最少回数繰り返すことを特徴とするシステム。
【請求項7】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を複数推定しそれらを同時に比較し最適な関係を選択し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「真ひずみ−体積変化に関係するパラメータ」関係と材料引張試験又は圧縮試験で得た「真ひずみ−体積変化に関係するパラメータ」関係の一致性を判断する手段を有し、試行錯誤法プロセス2の思考錯誤法を最少回数繰り返すことを特徴とするシステム。
【請求項8】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を既知のものと断定して設定しステップ8‐j、ステップ9−jでの判定を省略してステップ9−jでB6をB9と定義することを可能にする特長とするシステム。
【請求項9】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係の推定を非圧縮性モデルを用いて実施することで、金属材料の「真ひずみ−真応力」関係を決定することを特徴としたシステム。
【請求項10】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係の推定と判定の試行錯誤法プロセスが最少で3ステップ数であることを特長とするシステム。
【請求項11】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係の推定と判定の試行錯誤法プロセスが最少で4ステップであることを特長とするシステム。
【請求項12】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係推定手段と、材料試験を模擬したシミュレーションにより「変位−荷重」関係を求める手段と、材料試験により得られた「変位−荷重」関係と引張試験を模擬したシミュレーションにより求めた「変位−荷重」関係を比較し、その一致性を判定する手段の繰り返しを、遺伝的アルゴリズム等により自動的に繰返し最適な仮の「真ひずみ−真応力」関係を決定する手段を有することを特徴としたシステム。
【請求項13】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係推定手段と、材料試験を模擬したシミュレーションにより「真ひずみ−体積変化に関係するパラメータ」関係を求める手段と材料試験により得られた「真ひずみ−体積変化に関係するパラメータ」関係と材料試験を模擬したシミュレーションにより求めた「真ひずみ−体積変化に関係するパラメータ」関係を比較し、その一致性を判定する手段の繰り返しを、遺伝的アルゴリズムにより自動的に繰返し最適な「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を決定する手段を有することを特徴としたシステム。
【請求項1】
有限要素法等シミュレーションに用いる機械特性を求めるシステムにおいて、塑性ポアソン比がポアソン比と異なる材料からなる構造体の「真ひずみ−真応力」関係と「相当塑性ひずみ−運用するところの材料構成則に応じた塑性に伴う体積変化に関係するパラメータ」関係を作成するシステムであって、材料引張試験又は圧縮試験で「変位−荷重」関係および「公称ひずみ−公称応力」関係とともに「真ひずみ−体積変化に関係するパラメータ」関係を測定によって得て、その試験を模擬するシミュレーションによって「変位−荷重」関係と「真ひずみ−体積変化に関係するパラメータ」関係を得て、両者の一致性を判定して材料構成則へ入力される機械特性を作成する方法で、少なくとも「真ひずみ−体積変化に関係するパラメータ」関係を測定によって得て、その試験を模擬するシミュレーションによって「真ひずみ−体積変化に関係するパラメータ」関係を得て、両者の一致性を判定する手段を含むことを特徴とするシステム。
【請求項2】
請求項1に記載のシステムにおいて、「真ひずみ−体積変化に関係するパラメータ」関係を得るために、デジタル画像相関法等による試験片の微細な領域の塑性の変化の全塑性領域を2次元ないし3次元変形データで取得する手段を有することを特徴とするシステム。
【請求項3】
請求項1に記載のシステムにおいて、仮の「真ひずみ−真応力」関係を推定し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「変位−荷重」関係と材料引張試験又は圧縮試験で得た「変位−荷重」関係の一致性を判定する手段と、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を推定し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「真ひずみ−体積変化に関係するパラメータ」関係と材料引張試験又は圧縮試験で得た「真ひずみ−体積変化に関係するパラメータ」関係の一致性を判定する手段を有し、それぞれが独立して思考錯誤法を繰り返して適正なそれぞれの関係を見出すことを特徴とするシステム。
【請求項4】
請求項3に記載のシステムにおいて、塑性に伴う体積変化に関係するパラメータが弾性変形時と等価で変化の無い物として仮の「真ひずみ−真応力」関係を作成することを特徴とするシステム。
【請求項5】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係を体積変化に関係するパラメータから推定した仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係に対応した真の「真ひずみ−真応力」関係を作成することを特徴とするシステム。
【請求項6】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係を複数推定しそれらを同時に比較し最適な関係を選択し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「変位−荷重」関係と材料引張試験又は圧縮試験で得た「変位−荷重」関係の一致性を判断する手段を有し、試行錯誤法プロセス1の思考錯誤法を最少回数繰り返すことを特徴とするシステム。
【請求項7】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を複数推定しそれらを同時に比較し最適な関係を選択し材料引張試験又は圧縮試験を模擬するシミュレーションによって得られる「真ひずみ−体積変化に関係するパラメータ」関係と材料引張試験又は圧縮試験で得た「真ひずみ−体積変化に関係するパラメータ」関係の一致性を判断する手段を有し、試行錯誤法プロセス2の思考錯誤法を最少回数繰り返すことを特徴とするシステム。
【請求項8】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を既知のものと断定して設定しステップ8‐j、ステップ9−jでの判定を省略してステップ9−jでB6をB9と定義することを可能にする特長とするシステム。
【請求項9】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係の推定を非圧縮性モデルを用いて実施することで、金属材料の「真ひずみ−真応力」関係を決定することを特徴としたシステム。
【請求項10】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係の推定と判定の試行錯誤法プロセスが最少で3ステップ数であることを特長とするシステム。
【請求項11】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係の推定と判定の試行錯誤法プロセスが最少で4ステップであることを特長とするシステム。
【請求項12】
請求項3に記載のシステムにおいて、仮の「真ひずみ−真応力」関係推定手段と、材料試験を模擬したシミュレーションにより「変位−荷重」関係を求める手段と、材料試験により得られた「変位−荷重」関係と引張試験を模擬したシミュレーションにより求めた「変位−荷重」関係を比較し、その一致性を判定する手段の繰り返しを、遺伝的アルゴリズム等により自動的に繰返し最適な仮の「真ひずみ−真応力」関係を決定する手段を有することを特徴としたシステム。
【請求項13】
請求項3に記載のシステムにおいて、仮の「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係推定手段と、材料試験を模擬したシミュレーションにより「真ひずみ−体積変化に関係するパラメータ」関係を求める手段と材料試験により得られた「真ひずみ−体積変化に関係するパラメータ」関係と材料試験を模擬したシミュレーションにより求めた「真ひずみ−体積変化に関係するパラメータ」関係を比較し、その一致性を判定する手段の繰り返しを、遺伝的アルゴリズムにより自動的に繰返し最適な「相当塑性ひずみ−塑性に伴う体積変化に関係するパラメータ」関係を決定する手段を有することを特徴としたシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−88365(P2013−88365A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−231175(P2011−231175)
【出願日】平成23年10月20日(2011.10.20)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 〔刊行物名〕 第16回 計算工学講演会 講演会論文集 〔発行日〕 平成23年5月25日 〔発行者〕 一般社団法人日本計算工学会 〔該当ページ〕 セッション18_B−7−1 〔刊行物名〕 第24回 計算工学講演会 講演会論文集 〔発行日〕 平成23年10月7日 〔発行者〕 一般社団法人日本機械学会 〔該当ページ〕 No.11−3、305
【出願人】(711009497)株式会社テラバイト (1)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 〔刊行物名〕 第16回 計算工学講演会 講演会論文集 〔発行日〕 平成23年5月25日 〔発行者〕 一般社団法人日本計算工学会 〔該当ページ〕 セッション18_B−7−1 〔刊行物名〕 第24回 計算工学講演会 講演会論文集 〔発行日〕 平成23年10月7日 〔発行者〕 一般社団法人日本機械学会 〔該当ページ〕 No.11−3、305
【出願人】(711009497)株式会社テラバイト (1)
【Fターム(参考)】
[ Back to top ]