
塗布装置および吐出状態検査方法
【課題】短時間で精度良く全ノズルの吐出状態を検査することのできる吐出状態検査モードを備えた塗布装置および吐出状態検査方法を提供する。
【解決手段】各吐出ノズルからの液滴の吐出状態を検査する吐出状態検査モードを有する塗布装置であって、吐出状態検査モードにおいて、塗布ヘッド10を検査面31に対して平行な方向に速度v1で相対移動させている状態で吐出ノズル11から検査面31に向かって液滴を吐出することにより、液滴が検査面31に対して平行な方向にシフト量dだけ移動して検査面31上に着弾して液滴パターン21を形成し、画像認識カメラが取得したこの液滴パターン21の画像から液滴の位置を確認することにより、シフト量dを求め、このシフト量dをもとに液滴の吐出速度v2を算出し、これらシフト量dおよび吐出速度v2基づいて液滴の吐出状態を検査することを特徴とする。
【解決手段】各吐出ノズルからの液滴の吐出状態を検査する吐出状態検査モードを有する塗布装置であって、吐出状態検査モードにおいて、塗布ヘッド10を検査面31に対して平行な方向に速度v1で相対移動させている状態で吐出ノズル11から検査面31に向かって液滴を吐出することにより、液滴が検査面31に対して平行な方向にシフト量dだけ移動して検査面31上に着弾して液滴パターン21を形成し、画像認識カメラが取得したこの液滴パターン21の画像から液滴の位置を確認することにより、シフト量dを求め、このシフト量dをもとに液滴の吐出速度v2を算出し、これらシフト量dおよび吐出速度v2基づいて液滴の吐出状態を検査することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、インクを吐出する各ノズルの吐出状態を検査するモードを備えるインクジェット塗布装置および吐出状態を検査する方法に関するものである。
【背景技術】
【0002】
カラー液晶ディスプレイ等のフラットパネルディスプレイには、色形成の中核を成す部材としてカラーフィルタが用いられている。カラーフィルタは、ガラス基板上に微細なR(赤色)、G(緑色)、B(青色)の3色の画素が多数並べられて形成されている。
【0003】
このカラーフィルタを製造する装置として、ガラス基板上に形成された多数の微細な画素部に、R、G、Bの各インクをインクジェットヘッドから吐出して、R、G、Bの色画素を形成するインクジェット装置が近年用いられるようになってきている。
【0004】
インクジェットヘッドにはインクを吐出するノズルが多数配列されており、これらのノズルから複数の画素部へ同時にインクを吐出することにより複数の色画素を同時に形成することができるが、ノズルから吐出されるインクの量にはノズル同士の間で少なからずばらつきが生じる。すなわち、長時間の使用によりノズル内壁にインクが付着するため、これが要因となり各ノズルのインクの吐出量が随時変化する。このばらつきを考慮せずにそれぞれの画素部へのインクの吐出を行うと、それぞれの色画素を形成するインクの量にばらつきが生じ、それがカラーフィルタの色ムラとなる。
【0005】
各ノズルの吐出量のばらつきを把握するため、下記特許文献1では、ノズルから吐出されるインクの挙動を飛翔観察装置を用いて観察し、インク液滴の吐出速度を測定し、そこから各ノズルの吐出量を算出している。また、下記特許文献2では、ガラス基板とは別に設けられた着弾面へインク液滴を着弾させ、この着弾した液滴を上から見たときの面積をもとに液滴の体積を算出し、各ノズルの吐出量を求めている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−28696号公報
【特許文献2】特開2010−204409号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記特許文献1に記載された検査モードを備える塗布装置では、全てのノズルを検査するのに非常に時間がかかるといった問題があった。具体的には、1回の飛翔観察において吐出量を求めることができる液滴の数は数個であるのに対して、インクジェットヘッドには数万から数十万個のノズルが配列されており、全てのノズルにおける液滴の吐出速度を求めるには、膨大な時間を要する。
【0008】
また、上記特許文献2に記載されたモードを備える塗布装置では、吐出量測定の誤差が大きいという問題があった。具体的には、着弾面に着弾した液滴の形状は着弾面の撥液性に応じて変化し、撥液性が小さい場合、液滴は着弾面で濡れ広がって、上から見たときの面積が大きくなる。ここで、着弾面の撥液性にムラがある場合、着弾箇所の撥液性に応じて上から見たときの液滴の面積が変化するため、それから算出される吐出量に誤差が生じてしまう。また、着弾した液滴は、時間の経過とともに内部の溶剤が揮発して体積が小さくなるため、液滴面積を測定するタイミングのばらつきも、算出される吐出量に誤差を生じさせてしまう。
【0009】
本発明は、上記問題点に鑑みてなされたものであり、短時間で精度良く全ノズルの吐出状態を検査することのできる吐出状態検査モードを備えた塗布装置および吐出状態検査方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明の塗布装置は、複数の吐出ノズルを有する吐出ユニットと、液滴を着弾させるターゲットである検査面と、前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、液滴が着弾した前記検査面の画像を取得する画像認識カメラと、前記画像認識カメラで取得した画像を解析して液滴の着弾位置および吐出速度を確認する解析装置と、を備え、各吐出ノズルから液滴を吐出することにより基板に塗布膜を形成する塗布モードと、各吐出ノズルからの液滴の吐出状態を検査する吐出状態検査モードとを有する塗布装置であって、前記吐出状態検査モードにおいて、前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成し、前記解析装置は、前記画像認識カメラが取得した前記パターンの画像から液滴の位置を確認することにより、液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査することを特徴としている。
【0011】
上記塗布装置によれば、移動機構を駆動させている状態で吐出ユニットから検査面に向かって液滴を吐出することにより、液滴は検査面に対して平行な方向にシフトして着弾し、このシフト量を測定することによって液滴の吐出速度を算出することができる。ここで、液滴の吐出速度と吐出量との間に相関があるため、算出された吐出速度から吐出量を把握することができる。これにより、各ノズルの吐出状態を検査することが可能となる。また、液滴の吐出速度は、実際に着弾した液滴の重心位置と液滴がシフトしないで着弾した場合の重心位置との変位量(シフト量)によって算出され、着弾面の撥液性は吐出速度の算出に関係しないため、着弾面の撥液性のムラに影響されない、精度良い吐出状態検査を行うことができる。また、各吐出ノズルから同時に液滴を吐出し、それらのシフト量を求めて吐出状態の検査を行うことにより、全ての液滴の吐出状態を短時間に検査することが可能である。
【0012】
また、前記吐出状態検査モードにおいて、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することが望ましい。
【0013】
こうすることにより、各吐出ノズルから吐出される液滴の吐出量を詳細に把握でき、より精度良く吐出状態を検査することが可能である。すなわち、より精度良く吐出不良のノズルの検出および吐出量の制御を行うことが可能である。
【0014】
また、上記課題を解決するために本発明の吐出状態検査方法は、複数の吐出ノズルを有する吐出ユニットと、液滴を着弾させるターゲットである検査面と、前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、を備える塗布装置の吐出状態検査方法であって、前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成するパターン形成工程と、前記パターンの位置を確認することにより液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査する検査工程と、を有することを特徴としている。
【0015】
上記吐出状態検査方法によれば、パターン形成工程において移動機構を駆動させている状態で吐出ユニットから前記検査面に向かって液滴を吐出することにより、液滴は検査面に対して平行な方向にシフトして着弾し、検査工程においてこのシフト量を測定することによって液滴の吐出速度を算出することができる。ここで、液滴の吐出速度と吐出量との間に相関があるため、先述の通り、算出された吐出速度から吐出量を把握することができる。これにより各ノズルの吐出状態を検査することが可能となり、また、先述の通り、着弾面の撥液性は吐出速度の算出に関係しないため、着弾面の撥液性のムラに影響されない、精度良い吐出状態検査を行うことができる。また、各吐出ノズルから同時に液滴を吐出し、それらのシフト量を求めて吐出状態の検査を行うことにより、全ての液滴の吐出状態を短時間に検査することが可能である。
【0016】
また、前記検査工程において、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することが望ましい。
【0017】
こうすることにより、各吐出ノズルから吐出される液滴の吐出量を詳細に把握でき、より精度良く吐出状態を検査することが可能である。すなわち、より精度良く吐出不良のノズルの検出および吐出量の制御を行うことが可能である。
【発明の効果】
【0018】
上記の吐出状態検査モードを備えた塗布装置および吐出状態検査方法によれば、短時間で精度良く全ノズルの吐出状態を検査することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態を示す模式図であり、側面図である。
【図2】検査面および画像取得部の概略図であり、斜視図である。
【図3】検査面に着弾した塗布液の着弾パターンを示す模式図である。
【図4】着弾パターンのシフト量と各種速度との関係を示す模式図である。
【図5】塗布装置による塗布動作の動作フローである。
【図6】吐出状態検査モードの詳細動作フローである。
【発明を実施するための形態】
【0020】
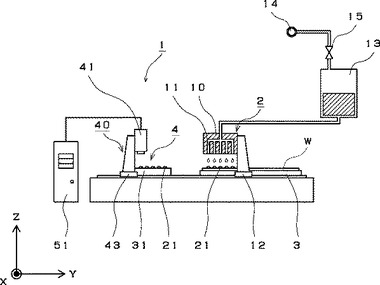
図1は、本発明の一実施形態を示す模式図である。塗布装置1は、塗布部2、塗布ステージ3、および吐出状態検査装置4を備えており、塗布部2が塗布ステージ3上の基板Wの上方を移動しながら塗布部2内の吐出ノズルから塗布液の液滴を吐出することにより、基板Wへの塗布動作が行われる。また、塗布部2が吐出状態検査装置4へ液滴を吐出し、その液滴の吐出状態を吐出状態検査装置4が解析することにより、吐出状態の検査が行われる。
【0021】
なお、以下の説明では、塗布部2が移動する方向をY軸方向、Y軸方向と水平面上で直交する方向をX軸方向、X軸およびY軸方向の双方に直交する方向をZ軸方向として説明を進めることとする。
【0022】
塗布部2は、塗布ヘッド10、および塗布ヘッドY軸12を有している。塗布ヘッド10は塗布ヘッドY軸12によって塗布ステージ3上の基板Wおよび後述する吐出状態検査装置4の検査面31といった吐出対象までの移動が可能であり、各吐出対象まで移動した後、塗布ヘッド10は自身が有する吐出ノズル11から各吐出対象に対して液滴の吐出を行う。
【0023】
塗布ヘッド10は、ほぼ直方体の形状をとり、その下面が水平になるよう配置されており、下面に複数の吐出ノズル11を有している。また、塗布ヘッド10は配管を通じてタンク13とつながっており、タンク13に貯蔵された塗布液が吐出部10へ供給される。タンク13から塗布ヘッド10へ供給されたこの塗布液は、全ての吐出ノズル11へ供給される。ここで、待機時に各吐出ノズル11から塗布液が漏れ出ないよう、真空源14から真空バルブ15を介してタンク13に所定の大きさの負圧をかけており、これによって吐出ノズル11内に塗布液がとどめられている。そして、これらの吐出ノズル11から塗布液の液滴が吐出されることで、塗布ヘッド10から基板Wおよび検査面31への液滴の吐出が行われる。また、各吐出ノズル11はそれぞれに図示しない吐出駆動機構を有し、図示しない制御装置から各吐出ノズル11において吐出のオン、オフの制御を行うことにより、任意の吐出ノズル11を選択して液滴を吐出することが可能である。なお、本実施形態では、吐出駆動機構としてピエゾアクチュエータを用いている。
【0024】
塗布ヘッドY軸12はリニアステージなどで構成される直動機構であり、これに組み付けられている塗布ヘッド10をY軸方向に移動させることが可能である。図示しない制御装置にて塗布ヘッドY軸12の駆動を制御することにより、塗布ヘッド10は基板Wおよび後述する検査面31に対して相対的に移動することができ、基板Wの上方および検査面31の上方へ移動することが可能である。また、塗布ヘッドY軸12を駆動させながら塗布ヘッド10の吐出ノズル11から基板Wへ液滴を吐出することにより、連続的に基板Wへの塗布を行うことが可能である。また、塗布ヘッドY軸12を駆動させながら塗布ヘッド10の吐出ノズル11から検査面31へ液滴を吐出することにより、検査面31に対してY軸方向に速度を有した状態で液滴を吐出することが可能である。
【0025】
また、本実施形態では、塗布ヘッド10はY軸方向だけでなく、図示しない駆動装置によりX軸方向にも移動可能としている。これにより、X軸方向の幅が塗布ヘッド10の長さよりも長い基板Wに対しても、1回の塗布動作が完了するごとに塗布ヘッド10をX軸方向にずらし、複数回に分けて塗布を行うことにより、基板Wの全面へ塗布を行うことが可能となっている。
【0026】
塗布ステージ3は、基板Wを固定する機構を有し、基板Wへの塗布動作はこの塗布ステージ3の上に基板Wを載置し、固定した状態で行われる。本実施形態では、塗布ステージ3は吸着機構を有しており、図示しない真空ポンプなどを動作させることにより、基板Wと当接する面に吸引力を発生させ、基板Wを吸着固定している。
【0027】
吐出状態検査装置4は、検査面31、画像取得部40および解析装置51を有している。吐出状態検査は、先述の塗布動作を開始する前、もしくは塗布動作を1回または複数回実施した後に行われ、吐出状態検査を行う場合には、塗布ヘッド10が検査面31の上方へ移動した後、塗布ヘッド10がY軸方向に移動しながら検査面31へ向けて液滴を吐出し、その液滴が検査面31に着弾して液滴パターン21を形成する。この液滴パターン21が形成された検査面31の画像データを画像取得部40が取得し、取得した画像データを解析装置51が解析して各吐出ノズル11からの液滴の吐出速度および吐出量を算出することにより、吐出状態の検査を行う。
【0028】
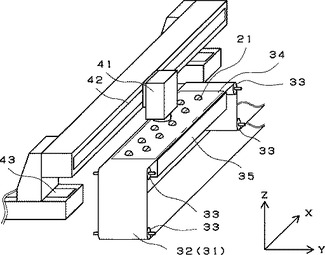
検査面31および画像取得部40の構成の詳細を図2に示す。本実施形態では、検査面31は帯状フィルム32であり、その両端は図示しない巻きだしローラおよび巻き取りローラにつながっている。ここで図示しない制御機構により巻き取りローラが回転することで、帯状フィルム32が巻き取られ、同時に供給ローラから帯状フィルムが巻き出される。帯状フィルム32の巻き取りおよび巻きだし動作を吐出状態検査を行う前に毎回行うことにより、常に異物のない面に液滴パターン21を形成し、吐出状態検査を行うことができる。
【0029】
また、巻きだしローラと巻き取りローラの間には複数のガイドローラ33が帯状フィルム32に当接しており、図上に鎖線で示す帯状フィルム32上の液滴が着弾する着弾領域34が水平になるよう、帯状フィルム32はガイドローラ33によりガイドされている。また、着弾領域34の下方には、帯状フィルム32を吸着するための吸着テーブル35が備えられている。吸着テーブル35は、帯状フィルム32と当接する面がほぼ平坦である。また、帯状フィルム32と当接する面は吸引口を有し、図示しない真空ポンプなどを駆動させることにより吸引力を持つことが可能である。吐出状態検査中はこの吸着テーブル35が着弾領域34を含む領域分の帯状フィルム32を吸着固定することにより、吐出状態検査中に着弾領域34にかかる部分で帯状フィルム32が張力により変形してしまい、液滴パターン21の位置がずれてしまうことを防いでいる。
【0030】
画像取得部40は、画像認識カメラ41、カメラX軸42およびカメラY軸43を有している。画像認識カメラ41はカメラX軸42およびカメラY軸43に組み付けられており、カメラX軸42およびカメラY軸43を駆動させることにより、画像認識カメラ41はX軸方向およびY軸方向に移動することが可能である。
【0031】
画像認識カメラ41は、本実施形態ではモノクロのCCDカメラであり、画像取得のタイミングについて外部からの制御が可能である。図示しない制御装置により指示を与えることで、この画像認識カメラ41は連続して画像データを取得し、この取得した画像データはケーブルを介して後述の解析装置51へ転送される。
【0032】
カメラX軸42は、リニアステージなどで構成される直動機構であり、画像認識カメラ41をX軸方向に移動させることが可能である。また、カメラY軸43は、リニアステージなどで構成される直動機構であり、画像認識カメラ41およびカメラX軸42をY軸方向に移動させることが可能である。
【0033】
ここで、図示しない制御装置を用いてカメラX軸42およびカメラY軸43の駆動を制御することにより、画像認識カメラ41は検査面31に対してX軸方向およびY軸方向に相対的に移動することが可能である。吐出状態検査中にこれらの移動機構を駆動させて画像認識カメラ41が移動しながら検査面31の画像データを連続して取得することにより、着弾領域34に形成された全ての液滴パターン21を撮像し、検査を行うことが可能である。
【0034】
また、液滴を検査面31に着弾させる時には塗布ヘッド10が検査面31の真上に位置する必要があるため、カメラY軸43を駆動させることにより、塗布ヘッド10が検査面31の真上に位置する間、検査カメラ41をY軸方向に移動させて退避させることも可能である。
【0035】
また、検査面31は、本実施形態のようなフィルム状だけでなく、ガラス板など板状であっても良い。ただし、この場合は、吐出状態検査を行う毎に検査面31を交換する必要がある。ここで検査面31をX軸方向またはY軸方向に移動させる機構を設けて検査面31をX軸方向またはY軸方向に移動させ、1枚の検査面31で複数回の吐出状態検査を行うようにしても、その移動させる距離の分だけ装置のスペースが必要となる。
【0036】
また、画像取得部40のその他の構成として、複数台の画像認識カメラ41がX軸方向に並べて設けられ、画像取得時に画像認識カメラ41は移動せずに全ての液滴パターン21の画像を取得する構成であっても良い。
【0037】
解析装置51は、CPUおよびRAMやROMを有するコンピュータであり、検査面31に形成された各液滴パターン21の位置を確認し、各吐出ノズル11の吐出状態を検査する。解析装置51には、画像データの各構成画素の輝度情報をもとに画像データから液滴パターン21の外形データを抽出する画像処理部、画像処理部により抽出した液滴パターン21の外形データから重心位置を算出し、後述するシフト量を算出したり、各吐出ノズル11からの液滴の吐出速度および吐出量をシフト量のデータから算出したりする解析部など、各機能を実行するためのプログラムが記憶されている。また、解析装置51は、ハードディスクや、RAMまたはROMなどのメモリからなる、各種情報を記憶する記憶装置を有しており、画像データや、解析部により算出された各液滴パターン21の重心位置データ、シフト量データ、各吐出ノズル11からの液滴の吐出速度および吐出量のデータ、使用可能な吐出ノズル11の情報などがこの記憶装置に記憶される。
【0038】
また、解析装置51は、画像認識カメラ41とケーブルを介して連結されており、画像認識カメラ41で取得された画像データを自身に取り込み、記憶装置に記憶することができる。
【0039】
次に、解析装置51が行う、各吐出ノズル11の吐出状態の検査方法について、以下に説明する。
【0040】
まず、自身に取り込んだ画像データから液滴パターン21の外形データを抽出し、各液滴パターン21の重心位置を確認する。具体的には、自身に取り込んだ画像データに対して、画像処理部がその画像データの各構成画素ごとの輝度値を計測する。そして、輝度値の計測により得られた、隣接画素間の輝度値の変化の度合いの情報をもとに、画像処理部が画像データから液滴パターン21の外形データを抽出する。そして、抽出された液滴パターン21の外形データに対し、それぞれの重心位置を解析部が算出する。各液滴パターン21の外形データの重心位置を算出する方法としては、各液滴パターン21の外形データに対して、個々に外接する矩形を求め、その矩形の重心を算出する方法などが用いられる。
【0041】
また、本実施形態では、画像データから液滴パターン21の外形データを抽出するにあたって、液滴パターン21の外形をより明確に確認し、抽出を容易とするために、解析装置51の画像処理部は、まず画像データを構成する各画素の輝度に対して所定の輝度値をしきい値として二値化し、例えば液滴部分が黒く、その他の部分が白くなるような白黒データに置き換え、この白黒データに対して液滴パターン21の外形データの抽出を行っている。
【0042】
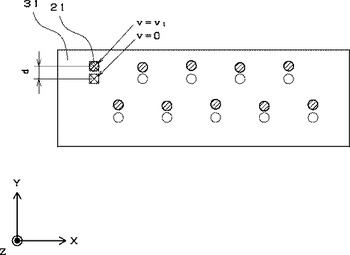
次に、解析装置51の解析部が、各液滴パターン21のシフト量を測定する。本実施形態では、塗布ヘッドY軸12によって塗布ヘッド10がY軸方向に移動しながら塗布ヘッド10の吐出ノズル11が検査面31へ向けて液滴を吐出したする。これにより、吐出された液滴は下方向(Z軸方向)だけでなくY軸方向にも速度を有するため、液滴は塗布ヘッド10の各吐出ノズル11より吐出されてから検査面31に着弾するまでにY軸方向にも変位する。したがって、液滴パターン21は、図3に示す通り、塗布ヘッド10がY軸方向に移動せずに(塗布ヘッド10の移動速度がゼロで)液滴を吐出した場合のパターンと比較して重心位置がY軸方向にシフトして存在する。このシフトした距離をシフト量dとすると、各吐出ノズル11から吐出された液滴のシフト量dは、吐出ノズル11から液滴が吐出される際の吐出速度によって変化する。したがって、各液滴パターン21のシフト量dを測定することにより、後述の通り各液滴の吐出速度および吐出量を算出することが可能である。
【0043】
次に、解析装置51の解析部は、各液滴パターン21のシフト量dから、各吐出ノズル11からの液滴の吐出速度を算出する。
【0044】
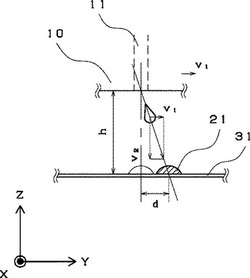
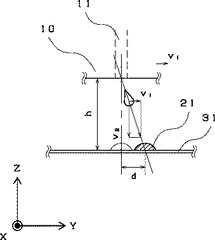
液滴パターン21のシフト量dと各種速度との関係を図4に示す。液滴のY軸方向の移動速度は、塗布ヘッドY軸12の移動速度と等しく、全液滴において一定である(この移動速度をv1とする)。移動速度v1があらかじめ設定されて既知であれば、シフト量dと移動速度v1より液滴が吐出されてから着弾するまでの時間(tとする)が算出できる。さらに塗布ヘッド10と検査面31との距離(hとする)が既知であれば、吐出ノズル11から吐出される液滴の吐出速度(v2とする)が時間tと距離hより算出できる。このことを利用し、解析部は、画像データより各液滴パターン21のシフト量dを求め、このシフト量dと既知のパラメータである塗布ヘッド10の移動速度v1および距離hより、液滴の吐出速度v2を算出する。
【0045】
液滴の吐出速度v2の算出について、たとえば塗布ヘッドY軸12の移動速度v1が500mm/秒、塗布ヘッド10と検査面31との距離hが600μmと既知であり、ある液滴パターン21のシフト量dが50μmであったとする。ここで、液滴が吐出されてから着弾するまでの時間は非常に短いので、その間液滴は吐出されてから着弾するまで等速で進むと近似すると、この液滴パターン21を形成した液滴が吐出されてから着弾するまでの時間tは、t=d/v1=50μm/(500mm/秒)=1/10,000秒となり、液滴の吐出速度v2は、v2=h/t=(h/d)v1=600μm/(1/10,000秒)=6m/秒と算出される。
【0046】
ここで、液滴の吐出速度と吐出量との間にも関係式が成立するため、液滴の吐出速度を求めることにより、解析装置51の解析部はこの関係式を用いて液滴の吐出量も求めることが可能である。液滴の吐出速度と吐出量との関係式は、粘度など、吐出する塗布液の物性にしたがって変化する。そこで、事前に実際に塗布液を吐出ノズル11から吐出させ、飛翔観測装置や電子はかりなどを用いて吐出速度と吐出量とを測定した吐出データを複数個準備し、それらをグラフにプロットした結果あてはまる近似直線または近似曲線から吐出速度と吐出量との関係式を求めると良い。このようにして、実際に塗布および吐出状態検査に用いる塗布液にあてはまる関係式を事前に準備し、上述の方法によって算出された液滴の吐出速度をこの関係式に代入することにより、各吐出ノズル11から吐出される液滴の吐出量を算出することができる。
【0047】
上述の通り解析装置51の解析部が各吐出ノズル11から吐出される液滴の吐出量を算出することにより、各吐出ノズル11の吐出状態を検査することが可能である。具体的には、所定の吐出量と吐出状態検査時の液滴の吐出量との差が所定のしきい値よりも大きくなった吐出ノズル11、または塗布ヘッド10の使用開始時の液滴の吐出量と吐出状態検査時の液滴の吐出量との差が所定のしきい値よりも大きくなった吐出ノズル11を認識し、この吐出ノズル11を不良ノズルとして、以後の基板Wへの塗布の際に使用しないように管理することが可能である。また、吐出量の情報を利用し、基板Wに形成されている各画素部へ吐出する複数滴の液滴の吐出量の合計が所定の値になるように、吐出に用いる吐出ノズル11の組み合わせを選択することも可能である。
【0048】
また、解析装置51の解析部が吐出量までは算出せず、吐出速度の算出までを行い、その値をもとに、便宜的に、各吐出ノズル11の吐出状態を検査する方法を採用しても良い。具体的には、所定の吐出速度と吐出状態検査時の液滴の吐出速度との差が所定のしきい値よりも大きくなった吐出ノズル11、または塗布ヘッド10の使用開始時の液滴の吐出速度と吐出状態検査時の液滴の吐出速度との差が所定のしきい値よりも大きくなった吐出ノズル11を認識し、この吐出ノズル11を不良ノズルとして以後の基板Wへの塗布の際に使用しないようにしても良い。また、基板Wの各画素部へ吐出する液滴の吐出速度の合計が所定の値となるように各画素部へ吐出を行う吐出ノズル11の組み合わせを選択して基板Wへの塗布を行うようにしても良い。こうすることにより、あらかじめ液滴の吐出速度と吐出量との関係式を求めなくても液滴の吐出状態の検査が可能であり、特に、使用する塗布液が1種類の場合、もしくは使用する複数種の塗布液の間で吐出速度と吐出量との関係式に大差が無いと予想される場合に有効である。
【0049】
また、解析装置51の解析部は、各吐出ノズル11におけるシフト量をもとに、さらに便宜的に、吐出状態が不良の吐出ノズル11を検出しても良い。具体的には、所定のシフト量と吐出状態検査時の液滴のシフト量との差が所定のしきい値よりも大きくなった吐出ノズル11、または塗布ヘッド10の使用開始時の液滴のシフトと吐出状態検査時の液滴のシフト量との差が所定のしきい値よりも大きくなった吐出ノズル11を認識し、この吐出ノズル11を不良ノズルとして以後の基板Wへの塗布の際に使用しないようにすると良い。
【0050】
次に、塗布装置1による基板Wへの塗布動作の動作フローを図5に示す。
【0051】
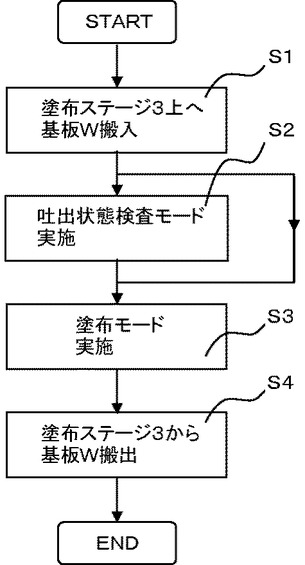
まず、基板Wが塗布装置1内の塗布ステージ3へ搬入されると(ステップS1)、吐出状態検査モードが実施され、各吐出ノズル11からの液滴の吐出状態が検査される(ステップS2)。次に、塗布モードが実施されることにより、塗布ヘッド10が基板W上を移動しながら液滴を塗布し、基板W上の各画素部へ塗布膜が形成される(ステップS3)。そして、塗布ステージ3から基板Wが搬出され(ステップS4)、1枚の基板Wへの塗布動作が完了する。
【0052】
ここで、吐出状態検査モードは、毎回の基板Wへの塗布時に実施する必要は無く、例えば、5枚の基板Wに塗布を行うごとに吐出状態検査モードを1回行い、その他は塗布モードのみ実施するなど、定期的に吐出状態検査モードを実施する形態であっても良い。また、図5では、塗布モードを実施する前に吐出状態検査モードを実施しているが、塗布モード実施後、基板Wを搬出する前に吐出状態検査モードを実施しても良い。また、たとえば、1スキャン目の塗布終了時など、塗布モード実施中に吐出状態検査モードを実施しても良い。
【0053】
次に、吐出状態検査モードの詳細動作フローを図6に示す。
【0054】
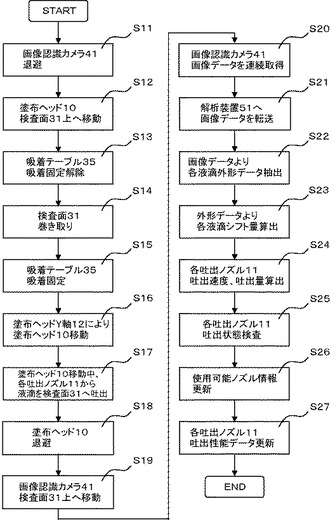
まず、検査面31上で塗布ヘッド10と干渉することが無いよう、カメラX軸42およびカメラY軸43が駆動することによって画像認識カメラ41が退避する(ステップS11)。画像認識カメラ41の退避が完了すると、塗布ヘッドY軸12が駆動することによって塗布ヘッド10が検査面31の真上まで移動する(ステップS12)。
【0055】
次に、吸着テーブル35による検査面31の吸着固定が解除され(ステップS13)、巻き取りローラが回転することで検査面31が所定の長さだけ巻き取られ(ステップS14)、あらためて吸着テーブル35が検査面31の吸着固定を行う(ステップS15)。これにより、異物の無い未使用の面に液滴の吐出が行われるようになる。ここで、この検査面31の巻き取りの工程は塗布ヘッド10が検査面31の真上まで移動した後に実施しているが、塗布ヘッド10や画像認識カメラ41が移動する前、もしくは移動中にこの工程を実施しても良い。また、前回の吐出状態検査が終了した直後に実施しておいても良い。
【0056】
次に、塗布ヘッドY軸12により塗布ヘッド10が検査面31に対して平行な方向に等速移動し(ステップS16)、その移動中に、塗布ヘッド10より液滴が吐出され(ステップS17)、検査面31に着弾して液滴パターン21が形成される。
【0057】
塗布ヘッド10からの吐出が完了したら、次に液滴パターン21の画像取得が行えるように、塗布ヘッドY軸12が駆動することによって塗布ヘッド10が退避し(ステップS18)、退避が完了した後、カメラX軸42およびカメラY軸43が駆動することによって画像認識カメラ41が検査面31の真上まで移動する(ステップS19)。そして、カメラX軸42およびカメラY軸43によって画像認識カメラ41が移動しながら連続して画像データを取得することにより、全ての液滴パターン21の画像データを取得する(ステップS20)。そしてその画像データが解析装置51へ転送され、解析装置51の記憶装置へ記憶される(ステップS21)。
【0058】
次に、解析装置51の画像処理部によって、解析装置51に記憶された画像データから液滴パターン21の外形データが抽出される(ステップ22)。
【0059】
次に、解析装置51の解析部によって各液滴パターン21の重心位置が求められ、その重心位置のデータから各液滴のシフト量が求められる(ステップ23)。そして、このシフト量から各液滴の吐出速度および吐出量(もしくは吐出速度のみ)が算出される(ステップS24)。
【0060】
次に、解析部がステップS24で算出された吐出速度もしくは吐出量データをもとに、各吐出ノズル11による吐出速度もしくは吐出量が所定の範囲内の吐出速度もしくは吐出量であるか否かの評価を行うことにより、吐出状態の検査が行われる(ステップS25)。
【0061】
ステップS25にて吐出状態の検査の結果が得られると、その結果は塗布装置1による以後の基板Wへの塗布の際の塗布条件に反映される。具体的には、吐出不良と認識された吐出ノズル11を除いた吐出ノズル11を使用可能ノズルとして、その使用可能ノズル情報が、吐出状態検査前のものから更新され(ステップS26)、各吐出ノズル11からの液滴の吐出量もしくは吐出速度のデータがまとめられた、吐出性能情報が、吐出状態検査前のものから更新される(ステップS27)。また、ここで吐出不良と検出された吐出ノズル11の数量が所定の値を超えると、以降の塗布動作には移行せず、塗布ヘッド10の交換をアナウンスするようにしている。また、吐出性能情報を更新した結果、所定の吐出量となる吐出ノズル11の組み合わせが作成できなくなった場合、一度吐出ノズル11のクリーニング動作(ブリードなど)を実施し、その後再び吐出状態検査を行うようにしている。
【0062】
以上の動作フローを経て、各吐出ノズル11の吐出状態の検査が行われ、その結果が以後の塗布条件へ反映されると、次に塗布装置1は、その塗布条件をもとに塗布モードを実施する。
【0063】
以上説明した通りの吐出状態検査モードを備える塗布装置および吐出状態検査方法により、短時間で精度良く各吐出ノズルの吐出状態を検査することができ、この検査結果を反映して各画素部への塗布液の吐出量を均一にすることによって、色ムラを生じさせないように基板への塗布を行うことが可能である。
【0064】
また、ここまでの説明では、塗布ヘッド10および画像認識カメラ41が塗布ステージ3および検査面31に対して相対移動する構成について、本実施形態では、カメラY軸43および塗布ヘッドY軸12を備え、塗布ヘッド10および画像認識カメラ41がそれぞれ独立してY軸方向に移動しているが、塗布ヘッド10と画像認識カメラ41を一つの架台にまとめて固定し、それをY軸方向に移動させるようにすることにより、上記の二つの移動機構を一つにまとめた構成としても良い。
【0065】
また、塗布ヘッド10および画像認識カメラ41に移動機構を設けるのではなく、検査面31および塗布ステージ3に移動機構を設け、塗布ヘッド10および画像認識カメラ41に対して検査面31および塗布ステージ3が相対移動する構成としても良い。
【符号の説明】
【0066】
1 塗布装置
2 塗布部
3 塗布ステージ
4 吐出状態検査装置
10 塗布ヘッド
11 吐出ノズル
12 塗布ヘッドY軸
13 タンク
14 真空源
15 真空バルブ
21 液滴パターン
31 検査面
32 帯状フィルム
33 ガイドローラ
34 着弾領域
35 吸着テーブル
40 画像取得部
41 画像認識カメラ
42 カメラX軸
43 カメラY軸
51 解析装置
W 基板
【技術分野】
【0001】
本発明は、インクを吐出する各ノズルの吐出状態を検査するモードを備えるインクジェット塗布装置および吐出状態を検査する方法に関するものである。
【背景技術】
【0002】
カラー液晶ディスプレイ等のフラットパネルディスプレイには、色形成の中核を成す部材としてカラーフィルタが用いられている。カラーフィルタは、ガラス基板上に微細なR(赤色)、G(緑色)、B(青色)の3色の画素が多数並べられて形成されている。
【0003】
このカラーフィルタを製造する装置として、ガラス基板上に形成された多数の微細な画素部に、R、G、Bの各インクをインクジェットヘッドから吐出して、R、G、Bの色画素を形成するインクジェット装置が近年用いられるようになってきている。
【0004】
インクジェットヘッドにはインクを吐出するノズルが多数配列されており、これらのノズルから複数の画素部へ同時にインクを吐出することにより複数の色画素を同時に形成することができるが、ノズルから吐出されるインクの量にはノズル同士の間で少なからずばらつきが生じる。すなわち、長時間の使用によりノズル内壁にインクが付着するため、これが要因となり各ノズルのインクの吐出量が随時変化する。このばらつきを考慮せずにそれぞれの画素部へのインクの吐出を行うと、それぞれの色画素を形成するインクの量にばらつきが生じ、それがカラーフィルタの色ムラとなる。
【0005】
各ノズルの吐出量のばらつきを把握するため、下記特許文献1では、ノズルから吐出されるインクの挙動を飛翔観察装置を用いて観察し、インク液滴の吐出速度を測定し、そこから各ノズルの吐出量を算出している。また、下記特許文献2では、ガラス基板とは別に設けられた着弾面へインク液滴を着弾させ、この着弾した液滴を上から見たときの面積をもとに液滴の体積を算出し、各ノズルの吐出量を求めている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−28696号公報
【特許文献2】特開2010−204409号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記特許文献1に記載された検査モードを備える塗布装置では、全てのノズルを検査するのに非常に時間がかかるといった問題があった。具体的には、1回の飛翔観察において吐出量を求めることができる液滴の数は数個であるのに対して、インクジェットヘッドには数万から数十万個のノズルが配列されており、全てのノズルにおける液滴の吐出速度を求めるには、膨大な時間を要する。
【0008】
また、上記特許文献2に記載されたモードを備える塗布装置では、吐出量測定の誤差が大きいという問題があった。具体的には、着弾面に着弾した液滴の形状は着弾面の撥液性に応じて変化し、撥液性が小さい場合、液滴は着弾面で濡れ広がって、上から見たときの面積が大きくなる。ここで、着弾面の撥液性にムラがある場合、着弾箇所の撥液性に応じて上から見たときの液滴の面積が変化するため、それから算出される吐出量に誤差が生じてしまう。また、着弾した液滴は、時間の経過とともに内部の溶剤が揮発して体積が小さくなるため、液滴面積を測定するタイミングのばらつきも、算出される吐出量に誤差を生じさせてしまう。
【0009】
本発明は、上記問題点に鑑みてなされたものであり、短時間で精度良く全ノズルの吐出状態を検査することのできる吐出状態検査モードを備えた塗布装置および吐出状態検査方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明の塗布装置は、複数の吐出ノズルを有する吐出ユニットと、液滴を着弾させるターゲットである検査面と、前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、液滴が着弾した前記検査面の画像を取得する画像認識カメラと、前記画像認識カメラで取得した画像を解析して液滴の着弾位置および吐出速度を確認する解析装置と、を備え、各吐出ノズルから液滴を吐出することにより基板に塗布膜を形成する塗布モードと、各吐出ノズルからの液滴の吐出状態を検査する吐出状態検査モードとを有する塗布装置であって、前記吐出状態検査モードにおいて、前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成し、前記解析装置は、前記画像認識カメラが取得した前記パターンの画像から液滴の位置を確認することにより、液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査することを特徴としている。
【0011】
上記塗布装置によれば、移動機構を駆動させている状態で吐出ユニットから検査面に向かって液滴を吐出することにより、液滴は検査面に対して平行な方向にシフトして着弾し、このシフト量を測定することによって液滴の吐出速度を算出することができる。ここで、液滴の吐出速度と吐出量との間に相関があるため、算出された吐出速度から吐出量を把握することができる。これにより、各ノズルの吐出状態を検査することが可能となる。また、液滴の吐出速度は、実際に着弾した液滴の重心位置と液滴がシフトしないで着弾した場合の重心位置との変位量(シフト量)によって算出され、着弾面の撥液性は吐出速度の算出に関係しないため、着弾面の撥液性のムラに影響されない、精度良い吐出状態検査を行うことができる。また、各吐出ノズルから同時に液滴を吐出し、それらのシフト量を求めて吐出状態の検査を行うことにより、全ての液滴の吐出状態を短時間に検査することが可能である。
【0012】
また、前記吐出状態検査モードにおいて、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することが望ましい。
【0013】
こうすることにより、各吐出ノズルから吐出される液滴の吐出量を詳細に把握でき、より精度良く吐出状態を検査することが可能である。すなわち、より精度良く吐出不良のノズルの検出および吐出量の制御を行うことが可能である。
【0014】
また、上記課題を解決するために本発明の吐出状態検査方法は、複数の吐出ノズルを有する吐出ユニットと、液滴を着弾させるターゲットである検査面と、前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、を備える塗布装置の吐出状態検査方法であって、前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成するパターン形成工程と、前記パターンの位置を確認することにより液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査する検査工程と、を有することを特徴としている。
【0015】
上記吐出状態検査方法によれば、パターン形成工程において移動機構を駆動させている状態で吐出ユニットから前記検査面に向かって液滴を吐出することにより、液滴は検査面に対して平行な方向にシフトして着弾し、検査工程においてこのシフト量を測定することによって液滴の吐出速度を算出することができる。ここで、液滴の吐出速度と吐出量との間に相関があるため、先述の通り、算出された吐出速度から吐出量を把握することができる。これにより各ノズルの吐出状態を検査することが可能となり、また、先述の通り、着弾面の撥液性は吐出速度の算出に関係しないため、着弾面の撥液性のムラに影響されない、精度良い吐出状態検査を行うことができる。また、各吐出ノズルから同時に液滴を吐出し、それらのシフト量を求めて吐出状態の検査を行うことにより、全ての液滴の吐出状態を短時間に検査することが可能である。
【0016】
また、前記検査工程において、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することが望ましい。
【0017】
こうすることにより、各吐出ノズルから吐出される液滴の吐出量を詳細に把握でき、より精度良く吐出状態を検査することが可能である。すなわち、より精度良く吐出不良のノズルの検出および吐出量の制御を行うことが可能である。
【発明の効果】
【0018】
上記の吐出状態検査モードを備えた塗布装置および吐出状態検査方法によれば、短時間で精度良く全ノズルの吐出状態を検査することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態を示す模式図であり、側面図である。
【図2】検査面および画像取得部の概略図であり、斜視図である。
【図3】検査面に着弾した塗布液の着弾パターンを示す模式図である。
【図4】着弾パターンのシフト量と各種速度との関係を示す模式図である。
【図5】塗布装置による塗布動作の動作フローである。
【図6】吐出状態検査モードの詳細動作フローである。
【発明を実施するための形態】
【0020】
図1は、本発明の一実施形態を示す模式図である。塗布装置1は、塗布部2、塗布ステージ3、および吐出状態検査装置4を備えており、塗布部2が塗布ステージ3上の基板Wの上方を移動しながら塗布部2内の吐出ノズルから塗布液の液滴を吐出することにより、基板Wへの塗布動作が行われる。また、塗布部2が吐出状態検査装置4へ液滴を吐出し、その液滴の吐出状態を吐出状態検査装置4が解析することにより、吐出状態の検査が行われる。
【0021】
なお、以下の説明では、塗布部2が移動する方向をY軸方向、Y軸方向と水平面上で直交する方向をX軸方向、X軸およびY軸方向の双方に直交する方向をZ軸方向として説明を進めることとする。
【0022】
塗布部2は、塗布ヘッド10、および塗布ヘッドY軸12を有している。塗布ヘッド10は塗布ヘッドY軸12によって塗布ステージ3上の基板Wおよび後述する吐出状態検査装置4の検査面31といった吐出対象までの移動が可能であり、各吐出対象まで移動した後、塗布ヘッド10は自身が有する吐出ノズル11から各吐出対象に対して液滴の吐出を行う。
【0023】
塗布ヘッド10は、ほぼ直方体の形状をとり、その下面が水平になるよう配置されており、下面に複数の吐出ノズル11を有している。また、塗布ヘッド10は配管を通じてタンク13とつながっており、タンク13に貯蔵された塗布液が吐出部10へ供給される。タンク13から塗布ヘッド10へ供給されたこの塗布液は、全ての吐出ノズル11へ供給される。ここで、待機時に各吐出ノズル11から塗布液が漏れ出ないよう、真空源14から真空バルブ15を介してタンク13に所定の大きさの負圧をかけており、これによって吐出ノズル11内に塗布液がとどめられている。そして、これらの吐出ノズル11から塗布液の液滴が吐出されることで、塗布ヘッド10から基板Wおよび検査面31への液滴の吐出が行われる。また、各吐出ノズル11はそれぞれに図示しない吐出駆動機構を有し、図示しない制御装置から各吐出ノズル11において吐出のオン、オフの制御を行うことにより、任意の吐出ノズル11を選択して液滴を吐出することが可能である。なお、本実施形態では、吐出駆動機構としてピエゾアクチュエータを用いている。
【0024】
塗布ヘッドY軸12はリニアステージなどで構成される直動機構であり、これに組み付けられている塗布ヘッド10をY軸方向に移動させることが可能である。図示しない制御装置にて塗布ヘッドY軸12の駆動を制御することにより、塗布ヘッド10は基板Wおよび後述する検査面31に対して相対的に移動することができ、基板Wの上方および検査面31の上方へ移動することが可能である。また、塗布ヘッドY軸12を駆動させながら塗布ヘッド10の吐出ノズル11から基板Wへ液滴を吐出することにより、連続的に基板Wへの塗布を行うことが可能である。また、塗布ヘッドY軸12を駆動させながら塗布ヘッド10の吐出ノズル11から検査面31へ液滴を吐出することにより、検査面31に対してY軸方向に速度を有した状態で液滴を吐出することが可能である。
【0025】
また、本実施形態では、塗布ヘッド10はY軸方向だけでなく、図示しない駆動装置によりX軸方向にも移動可能としている。これにより、X軸方向の幅が塗布ヘッド10の長さよりも長い基板Wに対しても、1回の塗布動作が完了するごとに塗布ヘッド10をX軸方向にずらし、複数回に分けて塗布を行うことにより、基板Wの全面へ塗布を行うことが可能となっている。
【0026】
塗布ステージ3は、基板Wを固定する機構を有し、基板Wへの塗布動作はこの塗布ステージ3の上に基板Wを載置し、固定した状態で行われる。本実施形態では、塗布ステージ3は吸着機構を有しており、図示しない真空ポンプなどを動作させることにより、基板Wと当接する面に吸引力を発生させ、基板Wを吸着固定している。
【0027】
吐出状態検査装置4は、検査面31、画像取得部40および解析装置51を有している。吐出状態検査は、先述の塗布動作を開始する前、もしくは塗布動作を1回または複数回実施した後に行われ、吐出状態検査を行う場合には、塗布ヘッド10が検査面31の上方へ移動した後、塗布ヘッド10がY軸方向に移動しながら検査面31へ向けて液滴を吐出し、その液滴が検査面31に着弾して液滴パターン21を形成する。この液滴パターン21が形成された検査面31の画像データを画像取得部40が取得し、取得した画像データを解析装置51が解析して各吐出ノズル11からの液滴の吐出速度および吐出量を算出することにより、吐出状態の検査を行う。
【0028】
検査面31および画像取得部40の構成の詳細を図2に示す。本実施形態では、検査面31は帯状フィルム32であり、その両端は図示しない巻きだしローラおよび巻き取りローラにつながっている。ここで図示しない制御機構により巻き取りローラが回転することで、帯状フィルム32が巻き取られ、同時に供給ローラから帯状フィルムが巻き出される。帯状フィルム32の巻き取りおよび巻きだし動作を吐出状態検査を行う前に毎回行うことにより、常に異物のない面に液滴パターン21を形成し、吐出状態検査を行うことができる。
【0029】
また、巻きだしローラと巻き取りローラの間には複数のガイドローラ33が帯状フィルム32に当接しており、図上に鎖線で示す帯状フィルム32上の液滴が着弾する着弾領域34が水平になるよう、帯状フィルム32はガイドローラ33によりガイドされている。また、着弾領域34の下方には、帯状フィルム32を吸着するための吸着テーブル35が備えられている。吸着テーブル35は、帯状フィルム32と当接する面がほぼ平坦である。また、帯状フィルム32と当接する面は吸引口を有し、図示しない真空ポンプなどを駆動させることにより吸引力を持つことが可能である。吐出状態検査中はこの吸着テーブル35が着弾領域34を含む領域分の帯状フィルム32を吸着固定することにより、吐出状態検査中に着弾領域34にかかる部分で帯状フィルム32が張力により変形してしまい、液滴パターン21の位置がずれてしまうことを防いでいる。
【0030】
画像取得部40は、画像認識カメラ41、カメラX軸42およびカメラY軸43を有している。画像認識カメラ41はカメラX軸42およびカメラY軸43に組み付けられており、カメラX軸42およびカメラY軸43を駆動させることにより、画像認識カメラ41はX軸方向およびY軸方向に移動することが可能である。
【0031】
画像認識カメラ41は、本実施形態ではモノクロのCCDカメラであり、画像取得のタイミングについて外部からの制御が可能である。図示しない制御装置により指示を与えることで、この画像認識カメラ41は連続して画像データを取得し、この取得した画像データはケーブルを介して後述の解析装置51へ転送される。
【0032】
カメラX軸42は、リニアステージなどで構成される直動機構であり、画像認識カメラ41をX軸方向に移動させることが可能である。また、カメラY軸43は、リニアステージなどで構成される直動機構であり、画像認識カメラ41およびカメラX軸42をY軸方向に移動させることが可能である。
【0033】
ここで、図示しない制御装置を用いてカメラX軸42およびカメラY軸43の駆動を制御することにより、画像認識カメラ41は検査面31に対してX軸方向およびY軸方向に相対的に移動することが可能である。吐出状態検査中にこれらの移動機構を駆動させて画像認識カメラ41が移動しながら検査面31の画像データを連続して取得することにより、着弾領域34に形成された全ての液滴パターン21を撮像し、検査を行うことが可能である。
【0034】
また、液滴を検査面31に着弾させる時には塗布ヘッド10が検査面31の真上に位置する必要があるため、カメラY軸43を駆動させることにより、塗布ヘッド10が検査面31の真上に位置する間、検査カメラ41をY軸方向に移動させて退避させることも可能である。
【0035】
また、検査面31は、本実施形態のようなフィルム状だけでなく、ガラス板など板状であっても良い。ただし、この場合は、吐出状態検査を行う毎に検査面31を交換する必要がある。ここで検査面31をX軸方向またはY軸方向に移動させる機構を設けて検査面31をX軸方向またはY軸方向に移動させ、1枚の検査面31で複数回の吐出状態検査を行うようにしても、その移動させる距離の分だけ装置のスペースが必要となる。
【0036】
また、画像取得部40のその他の構成として、複数台の画像認識カメラ41がX軸方向に並べて設けられ、画像取得時に画像認識カメラ41は移動せずに全ての液滴パターン21の画像を取得する構成であっても良い。
【0037】
解析装置51は、CPUおよびRAMやROMを有するコンピュータであり、検査面31に形成された各液滴パターン21の位置を確認し、各吐出ノズル11の吐出状態を検査する。解析装置51には、画像データの各構成画素の輝度情報をもとに画像データから液滴パターン21の外形データを抽出する画像処理部、画像処理部により抽出した液滴パターン21の外形データから重心位置を算出し、後述するシフト量を算出したり、各吐出ノズル11からの液滴の吐出速度および吐出量をシフト量のデータから算出したりする解析部など、各機能を実行するためのプログラムが記憶されている。また、解析装置51は、ハードディスクや、RAMまたはROMなどのメモリからなる、各種情報を記憶する記憶装置を有しており、画像データや、解析部により算出された各液滴パターン21の重心位置データ、シフト量データ、各吐出ノズル11からの液滴の吐出速度および吐出量のデータ、使用可能な吐出ノズル11の情報などがこの記憶装置に記憶される。
【0038】
また、解析装置51は、画像認識カメラ41とケーブルを介して連結されており、画像認識カメラ41で取得された画像データを自身に取り込み、記憶装置に記憶することができる。
【0039】
次に、解析装置51が行う、各吐出ノズル11の吐出状態の検査方法について、以下に説明する。
【0040】
まず、自身に取り込んだ画像データから液滴パターン21の外形データを抽出し、各液滴パターン21の重心位置を確認する。具体的には、自身に取り込んだ画像データに対して、画像処理部がその画像データの各構成画素ごとの輝度値を計測する。そして、輝度値の計測により得られた、隣接画素間の輝度値の変化の度合いの情報をもとに、画像処理部が画像データから液滴パターン21の外形データを抽出する。そして、抽出された液滴パターン21の外形データに対し、それぞれの重心位置を解析部が算出する。各液滴パターン21の外形データの重心位置を算出する方法としては、各液滴パターン21の外形データに対して、個々に外接する矩形を求め、その矩形の重心を算出する方法などが用いられる。
【0041】
また、本実施形態では、画像データから液滴パターン21の外形データを抽出するにあたって、液滴パターン21の外形をより明確に確認し、抽出を容易とするために、解析装置51の画像処理部は、まず画像データを構成する各画素の輝度に対して所定の輝度値をしきい値として二値化し、例えば液滴部分が黒く、その他の部分が白くなるような白黒データに置き換え、この白黒データに対して液滴パターン21の外形データの抽出を行っている。
【0042】
次に、解析装置51の解析部が、各液滴パターン21のシフト量を測定する。本実施形態では、塗布ヘッドY軸12によって塗布ヘッド10がY軸方向に移動しながら塗布ヘッド10の吐出ノズル11が検査面31へ向けて液滴を吐出したする。これにより、吐出された液滴は下方向(Z軸方向)だけでなくY軸方向にも速度を有するため、液滴は塗布ヘッド10の各吐出ノズル11より吐出されてから検査面31に着弾するまでにY軸方向にも変位する。したがって、液滴パターン21は、図3に示す通り、塗布ヘッド10がY軸方向に移動せずに(塗布ヘッド10の移動速度がゼロで)液滴を吐出した場合のパターンと比較して重心位置がY軸方向にシフトして存在する。このシフトした距離をシフト量dとすると、各吐出ノズル11から吐出された液滴のシフト量dは、吐出ノズル11から液滴が吐出される際の吐出速度によって変化する。したがって、各液滴パターン21のシフト量dを測定することにより、後述の通り各液滴の吐出速度および吐出量を算出することが可能である。
【0043】
次に、解析装置51の解析部は、各液滴パターン21のシフト量dから、各吐出ノズル11からの液滴の吐出速度を算出する。
【0044】
液滴パターン21のシフト量dと各種速度との関係を図4に示す。液滴のY軸方向の移動速度は、塗布ヘッドY軸12の移動速度と等しく、全液滴において一定である(この移動速度をv1とする)。移動速度v1があらかじめ設定されて既知であれば、シフト量dと移動速度v1より液滴が吐出されてから着弾するまでの時間(tとする)が算出できる。さらに塗布ヘッド10と検査面31との距離(hとする)が既知であれば、吐出ノズル11から吐出される液滴の吐出速度(v2とする)が時間tと距離hより算出できる。このことを利用し、解析部は、画像データより各液滴パターン21のシフト量dを求め、このシフト量dと既知のパラメータである塗布ヘッド10の移動速度v1および距離hより、液滴の吐出速度v2を算出する。
【0045】
液滴の吐出速度v2の算出について、たとえば塗布ヘッドY軸12の移動速度v1が500mm/秒、塗布ヘッド10と検査面31との距離hが600μmと既知であり、ある液滴パターン21のシフト量dが50μmであったとする。ここで、液滴が吐出されてから着弾するまでの時間は非常に短いので、その間液滴は吐出されてから着弾するまで等速で進むと近似すると、この液滴パターン21を形成した液滴が吐出されてから着弾するまでの時間tは、t=d/v1=50μm/(500mm/秒)=1/10,000秒となり、液滴の吐出速度v2は、v2=h/t=(h/d)v1=600μm/(1/10,000秒)=6m/秒と算出される。
【0046】
ここで、液滴の吐出速度と吐出量との間にも関係式が成立するため、液滴の吐出速度を求めることにより、解析装置51の解析部はこの関係式を用いて液滴の吐出量も求めることが可能である。液滴の吐出速度と吐出量との関係式は、粘度など、吐出する塗布液の物性にしたがって変化する。そこで、事前に実際に塗布液を吐出ノズル11から吐出させ、飛翔観測装置や電子はかりなどを用いて吐出速度と吐出量とを測定した吐出データを複数個準備し、それらをグラフにプロットした結果あてはまる近似直線または近似曲線から吐出速度と吐出量との関係式を求めると良い。このようにして、実際に塗布および吐出状態検査に用いる塗布液にあてはまる関係式を事前に準備し、上述の方法によって算出された液滴の吐出速度をこの関係式に代入することにより、各吐出ノズル11から吐出される液滴の吐出量を算出することができる。
【0047】
上述の通り解析装置51の解析部が各吐出ノズル11から吐出される液滴の吐出量を算出することにより、各吐出ノズル11の吐出状態を検査することが可能である。具体的には、所定の吐出量と吐出状態検査時の液滴の吐出量との差が所定のしきい値よりも大きくなった吐出ノズル11、または塗布ヘッド10の使用開始時の液滴の吐出量と吐出状態検査時の液滴の吐出量との差が所定のしきい値よりも大きくなった吐出ノズル11を認識し、この吐出ノズル11を不良ノズルとして、以後の基板Wへの塗布の際に使用しないように管理することが可能である。また、吐出量の情報を利用し、基板Wに形成されている各画素部へ吐出する複数滴の液滴の吐出量の合計が所定の値になるように、吐出に用いる吐出ノズル11の組み合わせを選択することも可能である。
【0048】
また、解析装置51の解析部が吐出量までは算出せず、吐出速度の算出までを行い、その値をもとに、便宜的に、各吐出ノズル11の吐出状態を検査する方法を採用しても良い。具体的には、所定の吐出速度と吐出状態検査時の液滴の吐出速度との差が所定のしきい値よりも大きくなった吐出ノズル11、または塗布ヘッド10の使用開始時の液滴の吐出速度と吐出状態検査時の液滴の吐出速度との差が所定のしきい値よりも大きくなった吐出ノズル11を認識し、この吐出ノズル11を不良ノズルとして以後の基板Wへの塗布の際に使用しないようにしても良い。また、基板Wの各画素部へ吐出する液滴の吐出速度の合計が所定の値となるように各画素部へ吐出を行う吐出ノズル11の組み合わせを選択して基板Wへの塗布を行うようにしても良い。こうすることにより、あらかじめ液滴の吐出速度と吐出量との関係式を求めなくても液滴の吐出状態の検査が可能であり、特に、使用する塗布液が1種類の場合、もしくは使用する複数種の塗布液の間で吐出速度と吐出量との関係式に大差が無いと予想される場合に有効である。
【0049】
また、解析装置51の解析部は、各吐出ノズル11におけるシフト量をもとに、さらに便宜的に、吐出状態が不良の吐出ノズル11を検出しても良い。具体的には、所定のシフト量と吐出状態検査時の液滴のシフト量との差が所定のしきい値よりも大きくなった吐出ノズル11、または塗布ヘッド10の使用開始時の液滴のシフトと吐出状態検査時の液滴のシフト量との差が所定のしきい値よりも大きくなった吐出ノズル11を認識し、この吐出ノズル11を不良ノズルとして以後の基板Wへの塗布の際に使用しないようにすると良い。
【0050】
次に、塗布装置1による基板Wへの塗布動作の動作フローを図5に示す。
【0051】
まず、基板Wが塗布装置1内の塗布ステージ3へ搬入されると(ステップS1)、吐出状態検査モードが実施され、各吐出ノズル11からの液滴の吐出状態が検査される(ステップS2)。次に、塗布モードが実施されることにより、塗布ヘッド10が基板W上を移動しながら液滴を塗布し、基板W上の各画素部へ塗布膜が形成される(ステップS3)。そして、塗布ステージ3から基板Wが搬出され(ステップS4)、1枚の基板Wへの塗布動作が完了する。
【0052】
ここで、吐出状態検査モードは、毎回の基板Wへの塗布時に実施する必要は無く、例えば、5枚の基板Wに塗布を行うごとに吐出状態検査モードを1回行い、その他は塗布モードのみ実施するなど、定期的に吐出状態検査モードを実施する形態であっても良い。また、図5では、塗布モードを実施する前に吐出状態検査モードを実施しているが、塗布モード実施後、基板Wを搬出する前に吐出状態検査モードを実施しても良い。また、たとえば、1スキャン目の塗布終了時など、塗布モード実施中に吐出状態検査モードを実施しても良い。
【0053】
次に、吐出状態検査モードの詳細動作フローを図6に示す。
【0054】
まず、検査面31上で塗布ヘッド10と干渉することが無いよう、カメラX軸42およびカメラY軸43が駆動することによって画像認識カメラ41が退避する(ステップS11)。画像認識カメラ41の退避が完了すると、塗布ヘッドY軸12が駆動することによって塗布ヘッド10が検査面31の真上まで移動する(ステップS12)。
【0055】
次に、吸着テーブル35による検査面31の吸着固定が解除され(ステップS13)、巻き取りローラが回転することで検査面31が所定の長さだけ巻き取られ(ステップS14)、あらためて吸着テーブル35が検査面31の吸着固定を行う(ステップS15)。これにより、異物の無い未使用の面に液滴の吐出が行われるようになる。ここで、この検査面31の巻き取りの工程は塗布ヘッド10が検査面31の真上まで移動した後に実施しているが、塗布ヘッド10や画像認識カメラ41が移動する前、もしくは移動中にこの工程を実施しても良い。また、前回の吐出状態検査が終了した直後に実施しておいても良い。
【0056】
次に、塗布ヘッドY軸12により塗布ヘッド10が検査面31に対して平行な方向に等速移動し(ステップS16)、その移動中に、塗布ヘッド10より液滴が吐出され(ステップS17)、検査面31に着弾して液滴パターン21が形成される。
【0057】
塗布ヘッド10からの吐出が完了したら、次に液滴パターン21の画像取得が行えるように、塗布ヘッドY軸12が駆動することによって塗布ヘッド10が退避し(ステップS18)、退避が完了した後、カメラX軸42およびカメラY軸43が駆動することによって画像認識カメラ41が検査面31の真上まで移動する(ステップS19)。そして、カメラX軸42およびカメラY軸43によって画像認識カメラ41が移動しながら連続して画像データを取得することにより、全ての液滴パターン21の画像データを取得する(ステップS20)。そしてその画像データが解析装置51へ転送され、解析装置51の記憶装置へ記憶される(ステップS21)。
【0058】
次に、解析装置51の画像処理部によって、解析装置51に記憶された画像データから液滴パターン21の外形データが抽出される(ステップ22)。
【0059】
次に、解析装置51の解析部によって各液滴パターン21の重心位置が求められ、その重心位置のデータから各液滴のシフト量が求められる(ステップ23)。そして、このシフト量から各液滴の吐出速度および吐出量(もしくは吐出速度のみ)が算出される(ステップS24)。
【0060】
次に、解析部がステップS24で算出された吐出速度もしくは吐出量データをもとに、各吐出ノズル11による吐出速度もしくは吐出量が所定の範囲内の吐出速度もしくは吐出量であるか否かの評価を行うことにより、吐出状態の検査が行われる(ステップS25)。
【0061】
ステップS25にて吐出状態の検査の結果が得られると、その結果は塗布装置1による以後の基板Wへの塗布の際の塗布条件に反映される。具体的には、吐出不良と認識された吐出ノズル11を除いた吐出ノズル11を使用可能ノズルとして、その使用可能ノズル情報が、吐出状態検査前のものから更新され(ステップS26)、各吐出ノズル11からの液滴の吐出量もしくは吐出速度のデータがまとめられた、吐出性能情報が、吐出状態検査前のものから更新される(ステップS27)。また、ここで吐出不良と検出された吐出ノズル11の数量が所定の値を超えると、以降の塗布動作には移行せず、塗布ヘッド10の交換をアナウンスするようにしている。また、吐出性能情報を更新した結果、所定の吐出量となる吐出ノズル11の組み合わせが作成できなくなった場合、一度吐出ノズル11のクリーニング動作(ブリードなど)を実施し、その後再び吐出状態検査を行うようにしている。
【0062】
以上の動作フローを経て、各吐出ノズル11の吐出状態の検査が行われ、その結果が以後の塗布条件へ反映されると、次に塗布装置1は、その塗布条件をもとに塗布モードを実施する。
【0063】
以上説明した通りの吐出状態検査モードを備える塗布装置および吐出状態検査方法により、短時間で精度良く各吐出ノズルの吐出状態を検査することができ、この検査結果を反映して各画素部への塗布液の吐出量を均一にすることによって、色ムラを生じさせないように基板への塗布を行うことが可能である。
【0064】
また、ここまでの説明では、塗布ヘッド10および画像認識カメラ41が塗布ステージ3および検査面31に対して相対移動する構成について、本実施形態では、カメラY軸43および塗布ヘッドY軸12を備え、塗布ヘッド10および画像認識カメラ41がそれぞれ独立してY軸方向に移動しているが、塗布ヘッド10と画像認識カメラ41を一つの架台にまとめて固定し、それをY軸方向に移動させるようにすることにより、上記の二つの移動機構を一つにまとめた構成としても良い。
【0065】
また、塗布ヘッド10および画像認識カメラ41に移動機構を設けるのではなく、検査面31および塗布ステージ3に移動機構を設け、塗布ヘッド10および画像認識カメラ41に対して検査面31および塗布ステージ3が相対移動する構成としても良い。
【符号の説明】
【0066】
1 塗布装置
2 塗布部
3 塗布ステージ
4 吐出状態検査装置
10 塗布ヘッド
11 吐出ノズル
12 塗布ヘッドY軸
13 タンク
14 真空源
15 真空バルブ
21 液滴パターン
31 検査面
32 帯状フィルム
33 ガイドローラ
34 着弾領域
35 吸着テーブル
40 画像取得部
41 画像認識カメラ
42 カメラX軸
43 カメラY軸
51 解析装置
W 基板
【特許請求の範囲】
【請求項1】
複数の吐出ノズルを有する吐出ユニットと、
液滴を着弾させるターゲットである検査面と、
前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、
液滴が着弾した前記検査面の画像を取得する画像認識カメラと、
前記画像認識カメラで取得した画像を解析して液滴の着弾位置および吐出速度を確認する解析装置と、
を備え、
各吐出ノズルから液滴を吐出することにより基板に塗布膜を形成する塗布モードと、各吐出ノズルからの液滴の吐出状態を検査する吐出状態検査モードとを有する塗布装置であって、
前記吐出状態検査モードにおいて、前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成し、
前記解析装置は、前記画像認識カメラが取得した前記パターンの画像から液滴の位置を確認することにより、液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査することを特徴とする、塗布装置。
【請求項2】
前記吐出状態検査モードにおいて、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することを特徴とする、請求項1に記載の塗布装置。
【請求項3】
複数の吐出ノズルを有する吐出ユニットと、
液滴を着弾させるターゲットである検査面と、
前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、
を備える塗布装置の吐出状態検査方法であって、
前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成するパターン形成工程と、
前記パターンの位置を確認することにより液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査する検査工程と、
を有することを特徴とする、吐出状態検査方法。
【請求項4】
前記検査工程において、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することを特徴とする、請求項3に記載の吐出状態検査方法。
【請求項1】
複数の吐出ノズルを有する吐出ユニットと、
液滴を着弾させるターゲットである検査面と、
前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、
液滴が着弾した前記検査面の画像を取得する画像認識カメラと、
前記画像認識カメラで取得した画像を解析して液滴の着弾位置および吐出速度を確認する解析装置と、
を備え、
各吐出ノズルから液滴を吐出することにより基板に塗布膜を形成する塗布モードと、各吐出ノズルからの液滴の吐出状態を検査する吐出状態検査モードとを有する塗布装置であって、
前記吐出状態検査モードにおいて、前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成し、
前記解析装置は、前記画像認識カメラが取得した前記パターンの画像から液滴の位置を確認することにより、液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査することを特徴とする、塗布装置。
【請求項2】
前記吐出状態検査モードにおいて、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することを特徴とする、請求項1に記載の塗布装置。
【請求項3】
複数の吐出ノズルを有する吐出ユニットと、
液滴を着弾させるターゲットである検査面と、
前記吐出ユニットと前記検査面とを前記検査面に対して平行な方向に相対移動させる移動機構と、
を備える塗布装置の吐出状態検査方法であって、
前記移動機構を駆動させている状態で前記吐出ユニットから前記検査面に向かって液滴を吐出することにより、前記検査面上に着弾してパターンを形成するパターン形成工程と、
前記パターンの位置を確認することにより液滴が前記吐出ユニットより吐出されてから前記検査面に着弾するまでに前記検査面に対して平行な方向に移動したシフト量を求め、前記シフト量をもとに液滴の吐出速度を算出し、前記シフト量および前記吐出速度に基づいて液滴の吐出状態を検査する検査工程と、
を有することを特徴とする、吐出状態検査方法。
【請求項4】
前記検査工程において、前記吐出速度をもとにさらに液滴の吐出量を算出し、前記吐出量に基づいて液滴の吐出状態を検査することを特徴とする、請求項3に記載の吐出状態検査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−166166(P2012−166166A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−30515(P2011−30515)
【出願日】平成23年2月16日(2011.2.16)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月16日(2011.2.16)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
[ Back to top ]