
塗布装置及び塗布方法

【課題】塗布液の粘性やぬれ性を制御して膜厚を制御する。
【解決手段】塗布装置1は、基板Wを支持するステージ2と、前記ステージに対して相対移動可能であり、前記ステージ上の基板に塗布材料を吐出する材料吐出ノズル7と、前記材料吐出ノズルとともに前記ステージに対して相対移動可能であり、前記ステージ上の基板に気体を噴射する気体噴射ノズル8と、を一体に備える塗布ヘッド4を備えた。
【解決手段】塗布装置1は、基板Wを支持するステージ2と、前記ステージに対して相対移動可能であり、前記ステージ上の基板に塗布材料を吐出する材料吐出ノズル7と、前記材料吐出ノズルとともに前記ステージに対して相対移動可能であり、前記ステージ上の基板に気体を噴射する気体噴射ノズル8と、を一体に備える塗布ヘッド4を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、塗布装置及び塗布方法に関し、例えば、塗布対象物上に材料を塗布して塗布膜を形成する塗布装置及び塗布方法に関する。
【背景技術】
【0002】
半導体などの分野において基板に膜を形成する方法として、例えば塗布ノズルを基板に対向させた状態で、塗布ノズルから材料を吐出させるとともに塗布ノズルと基板とを相対移動させて塗布を行う塗布方法がある。スパイラル塗布方法では、円形状の回転ステージ上に円盤状の基板を固定し、塗布ノズルの吐出面と基板表面の距離(ギャップ)を所定の値に保ち、その回転ステージを回転させ、流量を制御可能な定量ポンプで塗布ノズルから材料を吐出させながら、その塗布ノズルを基板中央から基板外周に向かって直線状に移動させ、らせん状(渦巻き状)の塗布軌跡を描くことで円形状の基板全面に膜形成を行う。このような塗布装置及び塗布方法では、高精度に膜厚形状を制御することが求められる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−320999号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
塗布装置及び塗布方法において、基板回転の遠心力や定量ポンプの慣性力などにより、膜厚の制御が困難となる。
【0005】
実施形態では、塗布液の粘性やぬれ性を変化させて膜厚を制御することが可能となる。
【課題を解決するための手段】
【0006】
実施形態の塗布装置は、塗布対象物を支持するステージと、前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に塗布材料を吐出する材料吐出部と、前記材料吐出ヘッドとともに前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に気体を噴射する気体噴射部と、を一体に備える塗布ヘッドと、を備えたことを特徴とする。
【0007】
実施形態の塗布方法は、塗布対象物に対して塗布ヘッドを相対移動させながら、前記塗布ヘッドに設けられた材料吐出部から塗布材料を吐出するとともに、前記塗布ヘッドに設けられた気体噴射部から気体を供給することを特徴とする塗布方法。
【図面の簡単な説明】
【0008】
【図1】第1実施形態にかかる塗布装置の構成を示す概略説明図。
【図2】同実施形態の塗布方法を示す基板の説明図。
【図3】同塗布装置の塗布ヘッドの切替動作を示す説明図。
【図4】同実施形態の塗布装置及び塗布方法を示すフローチャート。
【図5】同塗布方法における基板の領域を示す説明図。
【図6】同実施形態の塗布装置及び塗布方法を示す説明図。
【図7】第2実施形態にかかる塗布方法を示す説明図。
【発明を実施するための形態】
【0009】
[第1実施形態]
以下、第1実施形態かかる塗布装置及び塗布方法について、図1乃至5を参照して説明する。各図中矢印X,Y,Zはそれぞれ互いに直交する3方向を示す。また、各図において説明のため、適宜構成を拡大、縮小または省略して示している。
【0010】
本実施形態では塗布装置及び塗布方法として、スパイラル塗布装置及びスパイラル塗布方法を用いた例について説明する。
【0011】
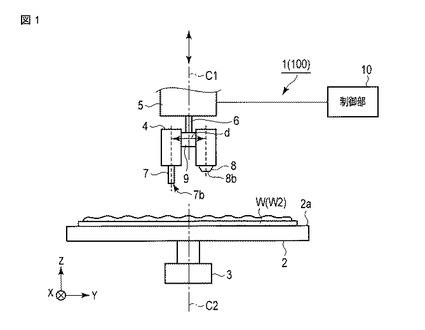
図1に示す塗布装置1は、塗布対象物としての基板Wが載置される載置面2aを有するステージ2と、そのステージ2を水平面内で回転させる回転機構3と、ステージ2上の基板Wに対向配置されて移動する塗布ヘッド4と、塗布ヘッド4とステージ2とをX軸方向及びZ軸方向に移動可能に支持するヘッド移動支持機構5と、各部を制御する制御部10と、を備えている。
【0012】
ステージ2は、例えば円形状に形成されており、回転機構3によりZ軸に沿う回転軸C2を中心に、水平面(XY面)内で回転可能に構成されている。このステージ2は、載置された基板Wを吸着する吸着機構を備えており、その吸着機構によりステージ2の載置面2a上に基板Wを固定して保持する。この吸着機構としては、例えばエアー吸着機構などが用いられる。
【0013】
回転機構3は、ステージ2を水平面内で回転可能に支持しており、ステージ中心を回転中心としてステージ2をモータなどの駆動源により水平面内で回転させる機構である。これにより、ステージ2上に載置された基板Wは水平面内で回転することになる。
【0014】
塗布ヘッド4は、ヘッド移動支持機構5に連結された回転軸6と、回転軸6を中心として一方側に設けられた材料吐出ノズル7と、回転軸6を中心として他方側に設けられた蒸気噴射ノズル8と、材料吐出ノズル7,蒸気噴射ノズル8間を連結する連結部9と、を一体に備えて構成されている。
【0015】
材料吐出ノズル7(材料吐出部)は、圧力によりその先端のノズル孔7bから例えばレジスト材などの液状の塗布材料を連続的に吐出し、その材料をステージ2上の基板Wに塗布する。
【0016】
蒸気噴射ノズル8(気体噴射部)は、圧力によりその先端のノズル孔8bから溶媒蒸気を連続的に噴射し、その溶媒蒸気をステージ2上の基板Wに供給する。溶媒蒸気としては、液体材料の溶媒、または液体材料に対して相溶性がある液体、あるいは液体材料に対して親和性を有する材料を含有する液体、の蒸気を用いる。
【0017】
溶媒蒸気は、例えば蒸気噴射と液体材料塗布のタイミングなどの条件によって決定される。例えばまず蒸気噴射を行い、その直後に液体材料の塗布を行う場合には、気体として液体材料の溶媒、液体材料に対して相溶性がある液体、または前記液体材料に対して親和性を有する材料を含有した液体、の蒸気を用いる。
【0018】
一方、例えばまず液体材料の塗布を行い、その直後に蒸気噴射を行う場合には、気体として、液体材料の溶媒、または液体材料に対して相溶性がある液体、の蒸気を用いる。
【0019】
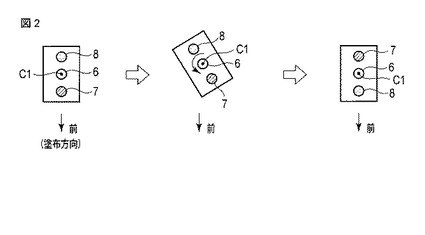
材料吐出ノズル7と蒸気噴射ノズル8とは連結部9を介して一体に設けられ、Z軸に沿う軸心C1を有する回転軸6を中心に水平面(XY平面)内で回転可能に構成されている。塗布ヘッド4が回転することにより、材料吐出ノズル7と蒸気噴射ノズル8の前後の位置関係が切替可能になっている。すなわち、図2に示すように、塗布ヘッド4を回転させるだけで容易に適当な位置関係に設定することができる。
【0020】
また、塗布ヘッド4は連結部9の長さが調節可能であり、材料吐出ノズル7と蒸気噴射ノズル8との間の距離dの長さが調節可能に構成されている。この距離dの調節より、基板Wに対する溶媒蒸気の供給タイミングと材料塗布タイミングの時間差を調節することができる。
【0021】
図1に示すように、移動機構5は、塗布ヘッド4を支持してZ軸方向に移動させるZ軸移動機構と、そのZ軸移動機構を介して塗布ヘッド4を支持しX軸方向に移動させるX軸移動機構とを備えている。この移動機構5は塗布ヘッド4をステージ2の上方に位置付け、その塗布ヘッド4をステージ2に対して相対移動させる。Z軸移動機構及びX軸移動機構としては、例えば、リニアモータを駆動源とするリニアモータ移動機構やモータを駆動源とする送りネジ移動機構などが用いられる。
【0022】
制御部10は、各部を集中的に制御するマイクロコンピュータと、各種プログラムや各種情報などを記憶する記憶部とを備えている。記憶部としては、メモリやハードディスクドライブ(HDD)などが用いられる。
【0023】
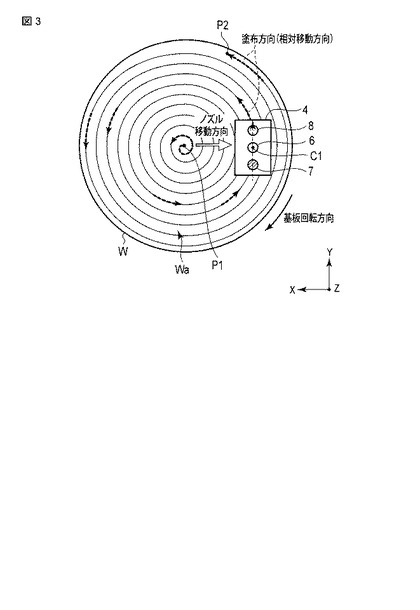
制御部10は、各種プログラムや各種情報(塗布条件情報など)に基づいて、回転機構3や移動機構5を制御し、図3に示すように、基板Wが載置されたステージ2を回転させながら、ノズル7,8から液体材料吐出及び蒸気噴射を行い、その塗布ヘッド4を基板中央から基板外周に向かってX軸方向に直線状に移動させる。この基板Wの図3時計回りの回転移動と、塗布ヘッド4の図3右方への直線移動によって、図3に破線矢印で示す塗布方向(相対移動方向)に沿って、基板Wの中心位置P1から外側端部P2に向かって塗布ヘッド4が相対移動することになり、この渦巻き状の塗布軌跡を描きながら基板Wに塗布材料が塗布され基板全面に膜Mの形成を行う(スパイラル塗布)。
【0024】
また、制御部10は、設定に応じて回転軸6を中心に塗布ヘッド4を回転させることによりノズル7,8の塗布方向に関する前後関係を切替制御する。
【0025】
以下、塗布装置1が行う成膜処理(塗布方法)について図4のフローチャートを参照して説明する。塗布装置1の制御部10は各種プログラムや各種情報(塗布条件情報など)に基づいて成膜処理を実行する。
【0026】
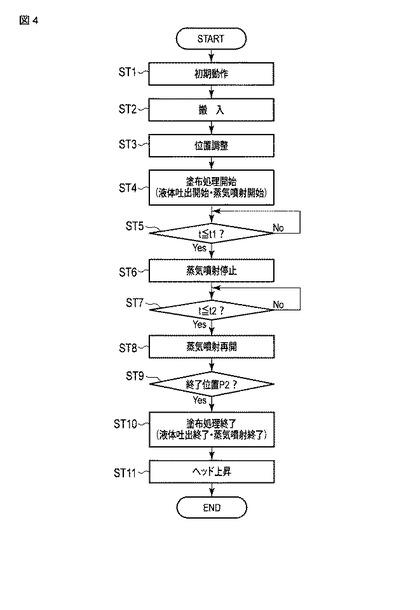
図4に示すように、まず原点復帰などの初期動作が行われる(ST1)。次に、基板である基板Wがロボットハンドリングなどの搬送機構によりステージ2上に搬入される(ST2)。基板Wはステージ2上に吸着機構により固定される。その後、塗布ヘッド4と基板Wの塗布面との垂直方向の距離(ギャップ)が設定値となるように塗布ヘッド4がZ軸移動機構5aによりZ軸方向に移動するとともに、水平面における塗布開始位置に塗布ヘッド4がセットされ、位置調整が行われる(ST3)。
【0027】
ついで、塗布処理としてST4からST10の処理が行われる。塗布処理としてまず、基板Wに対して塗布ヘッド4を相対移動させながら、材料吐出ノズル7から液体材料を吐出するとともに、蒸気ノズル8から蒸気を供給する(ST4)。
【0028】
なお、この実施形態では図5に示すように特に膜厚が厚くなりやすくなる中心領域A1と、エッジ領域A2とにおいて、局所的に蒸気噴射を行うこととし、これらの間の中央部分の領域A3については蒸気噴射を行わないこととした。例えば本実施形態では塗布ヘッド4を中心の塗布開始位置P1から外周端の塗布終了位置P2に向かって移動させながら処理することとしたので、制御部10の制御により、塗布開始から一定時間t1経過まで(ST5)液体材料吐出とともに蒸気噴射を行い、一定時間t1経過後に蒸気噴射を停止し(ST6)、その後液体材料吐出のみを行い(ST7)、一定時間t2経過時点で蒸気噴射を再開して(ST8)、塗布終了まで液体材料吐出とともに蒸気噴射を続ける。例えば一定時間t1、t2は塗布速度や領域A1,A2の幅などの条件に応じて設定される。
【0029】
このとき、ステージ2が回転機構3により回転し、そのステージ2上の基板Wが回転している状態で、塗布ヘッド4が基板Wの中央である開始位置からX軸方向に、すなわち基板Wの中心から外周に向かって等速で移動する。そして、蒸気ノズル8から蒸気を噴射するとともに材料吐出ノズル7から液体材料を連続して基板Wの塗布面に吐出し、その塗布面上に渦巻状に材料を塗布する(スパイラル塗布)。これにより、基板Wの塗布面上に塗布膜Mが形成される。
【0030】
この移動に伴って、図6に示すように、領域A1,A2においては、まず前処理として液体材料の塗布に先立って塗布方向前方に位置するノズル8から蒸気噴射が行われ、その直後にノズル7から液体材料の吐出が行われることとなる。
【0031】
ここでは両方のノズル7,8からそれぞれ連続的に吐出及び噴射を行うが、ノズル7,8は塗布方向において前後に位置ずれ配置されているため、基板W上には、開始位置P1から終了位置P2に至る渦巻き状の塗布軌跡の各箇所において蒸気噴射と液体塗布が順次行われることとなる。
【0032】
次に、あらかじめ設定された所定位置または所定時間に達したか否かが判断され(ST9)、塗布完了直前の所定位置または所定時間でないと判断された場合には(ST9のN)、塗布処理が続行される。例えば円形の基板Wにおいては外側端部を終了位置P2とする。終了位置P2に到達したら、液体吐出及び蒸気噴射を終了し、塗布処理を終了する(ST10)。
【0033】
塗布終了後、塗布ヘッド4が移動機構5により上昇する(ST11)。そして、基板W上の塗布膜Mが観察装置により観察、すなわち検査され、塗布膜Mに抜けが発生したか否か、塗布膜Mの異物の有無、膜厚異常の有無、塗布膜Mのエッジ部Meの形状等が監視され、必要な場合には部分塗布を行うリペア処理が成され、処理が終了する。
【0034】
本実施形態の塗布装置及び塗布方法によれば、塗布時に溶媒蒸気を噴射することで塗布液の粘性やぬれ性を変化させて膜厚を制御することが可能となる。
【0035】
例えば塗布材料吐出の直前に親和性や相溶性を有する液体の蒸気を予め噴射すると、基板上における濡れ性が向上するため、その直後に塗布される液体材料が広がりやすくなる。したがって、膜厚が均一となり、ウェハ基板W全体の均一性が向上する。
【0036】
また、本実施形態では局所的に溶媒蒸気噴射のタイミングを制御することにより局所的に噴射を行うことが可能であるため、特に基板の回転遠心力や定量ポンプの慣性力などの影響で膜厚が厚くなりやすい塗布開始点である中心位置や、塗布終了点であるエッジ部において、局所的に蒸気噴射を行うことで、膜厚を制御して均一とすることが可能となる。したがって、局所的に膜厚が厚くなることによって後の露光・現像工程で生じる不良を回避できる。
【0037】
本実施形態の塗布装置及び塗布方法では、溶媒噴射ノズルと材料吐出ノズルとを一体として移動させながら塗布及び溶媒蒸気噴射を行うことにより、タイミングの差を縮めるとともにタイミング制御を容易にすることができる。したがって、乾燥による揮発や変質が生じる前に処理を行うことができる。また、蒸気を供給することにより微量の溶媒を基板または塗布された液面の表面に均一に供給することが可能となる。
【0038】
回転軸を中心として両側にノズル7、8を配置するとともに塗布ヘッド4を回転させて角度を変えることで複数のノズル7,8の前後の位置関係を変更できる。したがって、単純な構成で材料や環境に応じて溶媒供給のタイミングを容易に変更することができる。
【0039】
また、液体塗布処理と並行して蒸気噴射処理を進めることができるため、処理時間を短縮できる。また、蒸気噴射のタイミングを制御することにより局所的な処理が可能である。
【0040】
なお、本発明は上記実施形態に限られるものではない。例えば上記第1実施形態においては、蒸気噴射ノズル8を材料吐出ノズル7よりも塗布方向前方の位置に配置し、材料塗布の前に蒸気噴射を行う例を示したが、これに限られるものではない。例えば図4に示すように塗布ヘッド4を回転させて前後関係を逆転させることで、逆の順序での処理が可能となる。塗布材料吐出の直後に相溶性を有する液体の蒸気を噴射すると、塗布材料の粘性が低下するため、液体材料が広がりやすくなる。したがって、膜厚が均一となり、ウェハ基板W全体の均一性が向上する。
【0041】
例えば上記実施形態では膜厚形状が変動しやすい塗布開始地点及び塗布終了地点において、局所的に蒸気噴射を行って膜厚制御する場合を例示したが、これに限られるものではなく、他の部位を局所的に蒸気噴射してもよく、また基板Wの全面に対して均一に蒸気噴射を行うこととしてもよい。蒸気噴射量を調整可能に構成し、塗布部位に応じて複数段階で蒸気噴射量を制御してもよい。
【0042】
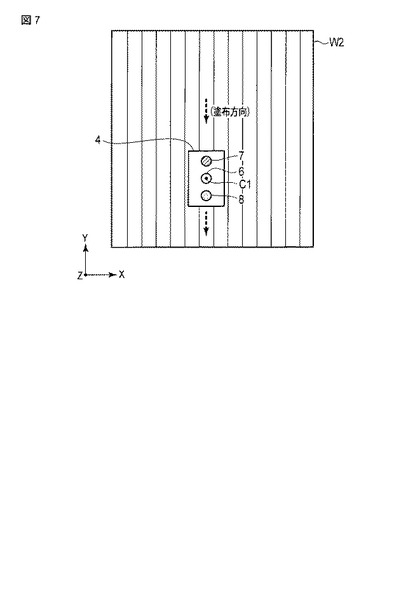
上記第1実施形態では円形の基板Wにらせん状の軌跡を描きながら塗布するスパイラル塗布装置及びスパイラル塗布方法を例示したが、これに限られるものではない。例えば図1、図7に示すように、他の実施形態の塗布装置100及び塗布方法として、矩形の基板W2に対して、直線上に相対移動させながら材料吐出及び上記噴射を行い、直線上の軌跡に沿って相対移動させながら塗布および蒸気噴射を行うこととしてもよい。
【0043】
なお、図1に示す塗布装置100において、塗布方向に沿ってノズル7,8を並列させるとともに、塗布ヘッド4毎X方向及びY方向に移動可能とすることで、本実施形態の直線上の軌跡に相対移動させることができ、基板W2の塗布処理を行うことが可能である。
【0044】
この場合にも上記第1実施形態と同様の効果が得られる。すなわち、塗布ヘッド4には材料吐出ノズル7と蒸気噴射ノズル8を一体に備え、これらノズル7,8を一体として移動可能にしたことにより、基板W2に対して蒸気噴射処理と塗布処理とを順次行うことができる。また、回転により前後位置関係を逆転可能とするとともに離間距離dを調節可能であるため処理順序及び処理間隔を調整することができる。
【0045】
本発明の実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0046】
W、W2…基板、M…塗布膜、1、100…塗布装置、2a…載置面、2…ステージ、3…回転機構、4…塗布ヘッド、5…移動機構、6…回転軸、7…材料吐出ノズル、
7b…ノズル孔、8…蒸気噴射ノズル、8b…ノズル孔、9…連結部、10…制御部。
【技術分野】
【0001】
本発明は、塗布装置及び塗布方法に関し、例えば、塗布対象物上に材料を塗布して塗布膜を形成する塗布装置及び塗布方法に関する。
【背景技術】
【0002】
半導体などの分野において基板に膜を形成する方法として、例えば塗布ノズルを基板に対向させた状態で、塗布ノズルから材料を吐出させるとともに塗布ノズルと基板とを相対移動させて塗布を行う塗布方法がある。スパイラル塗布方法では、円形状の回転ステージ上に円盤状の基板を固定し、塗布ノズルの吐出面と基板表面の距離(ギャップ)を所定の値に保ち、その回転ステージを回転させ、流量を制御可能な定量ポンプで塗布ノズルから材料を吐出させながら、その塗布ノズルを基板中央から基板外周に向かって直線状に移動させ、らせん状(渦巻き状)の塗布軌跡を描くことで円形状の基板全面に膜形成を行う。このような塗布装置及び塗布方法では、高精度に膜厚形状を制御することが求められる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−320999号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
塗布装置及び塗布方法において、基板回転の遠心力や定量ポンプの慣性力などにより、膜厚の制御が困難となる。
【0005】
実施形態では、塗布液の粘性やぬれ性を変化させて膜厚を制御することが可能となる。
【課題を解決するための手段】
【0006】
実施形態の塗布装置は、塗布対象物を支持するステージと、前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に塗布材料を吐出する材料吐出部と、前記材料吐出ヘッドとともに前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に気体を噴射する気体噴射部と、を一体に備える塗布ヘッドと、を備えたことを特徴とする。
【0007】
実施形態の塗布方法は、塗布対象物に対して塗布ヘッドを相対移動させながら、前記塗布ヘッドに設けられた材料吐出部から塗布材料を吐出するとともに、前記塗布ヘッドに設けられた気体噴射部から気体を供給することを特徴とする塗布方法。
【図面の簡単な説明】
【0008】
【図1】第1実施形態にかかる塗布装置の構成を示す概略説明図。
【図2】同実施形態の塗布方法を示す基板の説明図。
【図3】同塗布装置の塗布ヘッドの切替動作を示す説明図。
【図4】同実施形態の塗布装置及び塗布方法を示すフローチャート。
【図5】同塗布方法における基板の領域を示す説明図。
【図6】同実施形態の塗布装置及び塗布方法を示す説明図。
【図7】第2実施形態にかかる塗布方法を示す説明図。
【発明を実施するための形態】
【0009】
[第1実施形態]
以下、第1実施形態かかる塗布装置及び塗布方法について、図1乃至5を参照して説明する。各図中矢印X,Y,Zはそれぞれ互いに直交する3方向を示す。また、各図において説明のため、適宜構成を拡大、縮小または省略して示している。
【0010】
本実施形態では塗布装置及び塗布方法として、スパイラル塗布装置及びスパイラル塗布方法を用いた例について説明する。
【0011】
図1に示す塗布装置1は、塗布対象物としての基板Wが載置される載置面2aを有するステージ2と、そのステージ2を水平面内で回転させる回転機構3と、ステージ2上の基板Wに対向配置されて移動する塗布ヘッド4と、塗布ヘッド4とステージ2とをX軸方向及びZ軸方向に移動可能に支持するヘッド移動支持機構5と、各部を制御する制御部10と、を備えている。
【0012】
ステージ2は、例えば円形状に形成されており、回転機構3によりZ軸に沿う回転軸C2を中心に、水平面(XY面)内で回転可能に構成されている。このステージ2は、載置された基板Wを吸着する吸着機構を備えており、その吸着機構によりステージ2の載置面2a上に基板Wを固定して保持する。この吸着機構としては、例えばエアー吸着機構などが用いられる。
【0013】
回転機構3は、ステージ2を水平面内で回転可能に支持しており、ステージ中心を回転中心としてステージ2をモータなどの駆動源により水平面内で回転させる機構である。これにより、ステージ2上に載置された基板Wは水平面内で回転することになる。
【0014】
塗布ヘッド4は、ヘッド移動支持機構5に連結された回転軸6と、回転軸6を中心として一方側に設けられた材料吐出ノズル7と、回転軸6を中心として他方側に設けられた蒸気噴射ノズル8と、材料吐出ノズル7,蒸気噴射ノズル8間を連結する連結部9と、を一体に備えて構成されている。
【0015】
材料吐出ノズル7(材料吐出部)は、圧力によりその先端のノズル孔7bから例えばレジスト材などの液状の塗布材料を連続的に吐出し、その材料をステージ2上の基板Wに塗布する。
【0016】
蒸気噴射ノズル8(気体噴射部)は、圧力によりその先端のノズル孔8bから溶媒蒸気を連続的に噴射し、その溶媒蒸気をステージ2上の基板Wに供給する。溶媒蒸気としては、液体材料の溶媒、または液体材料に対して相溶性がある液体、あるいは液体材料に対して親和性を有する材料を含有する液体、の蒸気を用いる。
【0017】
溶媒蒸気は、例えば蒸気噴射と液体材料塗布のタイミングなどの条件によって決定される。例えばまず蒸気噴射を行い、その直後に液体材料の塗布を行う場合には、気体として液体材料の溶媒、液体材料に対して相溶性がある液体、または前記液体材料に対して親和性を有する材料を含有した液体、の蒸気を用いる。
【0018】
一方、例えばまず液体材料の塗布を行い、その直後に蒸気噴射を行う場合には、気体として、液体材料の溶媒、または液体材料に対して相溶性がある液体、の蒸気を用いる。
【0019】
材料吐出ノズル7と蒸気噴射ノズル8とは連結部9を介して一体に設けられ、Z軸に沿う軸心C1を有する回転軸6を中心に水平面(XY平面)内で回転可能に構成されている。塗布ヘッド4が回転することにより、材料吐出ノズル7と蒸気噴射ノズル8の前後の位置関係が切替可能になっている。すなわち、図2に示すように、塗布ヘッド4を回転させるだけで容易に適当な位置関係に設定することができる。
【0020】
また、塗布ヘッド4は連結部9の長さが調節可能であり、材料吐出ノズル7と蒸気噴射ノズル8との間の距離dの長さが調節可能に構成されている。この距離dの調節より、基板Wに対する溶媒蒸気の供給タイミングと材料塗布タイミングの時間差を調節することができる。
【0021】
図1に示すように、移動機構5は、塗布ヘッド4を支持してZ軸方向に移動させるZ軸移動機構と、そのZ軸移動機構を介して塗布ヘッド4を支持しX軸方向に移動させるX軸移動機構とを備えている。この移動機構5は塗布ヘッド4をステージ2の上方に位置付け、その塗布ヘッド4をステージ2に対して相対移動させる。Z軸移動機構及びX軸移動機構としては、例えば、リニアモータを駆動源とするリニアモータ移動機構やモータを駆動源とする送りネジ移動機構などが用いられる。
【0022】
制御部10は、各部を集中的に制御するマイクロコンピュータと、各種プログラムや各種情報などを記憶する記憶部とを備えている。記憶部としては、メモリやハードディスクドライブ(HDD)などが用いられる。
【0023】
制御部10は、各種プログラムや各種情報(塗布条件情報など)に基づいて、回転機構3や移動機構5を制御し、図3に示すように、基板Wが載置されたステージ2を回転させながら、ノズル7,8から液体材料吐出及び蒸気噴射を行い、その塗布ヘッド4を基板中央から基板外周に向かってX軸方向に直線状に移動させる。この基板Wの図3時計回りの回転移動と、塗布ヘッド4の図3右方への直線移動によって、図3に破線矢印で示す塗布方向(相対移動方向)に沿って、基板Wの中心位置P1から外側端部P2に向かって塗布ヘッド4が相対移動することになり、この渦巻き状の塗布軌跡を描きながら基板Wに塗布材料が塗布され基板全面に膜Mの形成を行う(スパイラル塗布)。
【0024】
また、制御部10は、設定に応じて回転軸6を中心に塗布ヘッド4を回転させることによりノズル7,8の塗布方向に関する前後関係を切替制御する。
【0025】
以下、塗布装置1が行う成膜処理(塗布方法)について図4のフローチャートを参照して説明する。塗布装置1の制御部10は各種プログラムや各種情報(塗布条件情報など)に基づいて成膜処理を実行する。
【0026】
図4に示すように、まず原点復帰などの初期動作が行われる(ST1)。次に、基板である基板Wがロボットハンドリングなどの搬送機構によりステージ2上に搬入される(ST2)。基板Wはステージ2上に吸着機構により固定される。その後、塗布ヘッド4と基板Wの塗布面との垂直方向の距離(ギャップ)が設定値となるように塗布ヘッド4がZ軸移動機構5aによりZ軸方向に移動するとともに、水平面における塗布開始位置に塗布ヘッド4がセットされ、位置調整が行われる(ST3)。
【0027】
ついで、塗布処理としてST4からST10の処理が行われる。塗布処理としてまず、基板Wに対して塗布ヘッド4を相対移動させながら、材料吐出ノズル7から液体材料を吐出するとともに、蒸気ノズル8から蒸気を供給する(ST4)。
【0028】
なお、この実施形態では図5に示すように特に膜厚が厚くなりやすくなる中心領域A1と、エッジ領域A2とにおいて、局所的に蒸気噴射を行うこととし、これらの間の中央部分の領域A3については蒸気噴射を行わないこととした。例えば本実施形態では塗布ヘッド4を中心の塗布開始位置P1から外周端の塗布終了位置P2に向かって移動させながら処理することとしたので、制御部10の制御により、塗布開始から一定時間t1経過まで(ST5)液体材料吐出とともに蒸気噴射を行い、一定時間t1経過後に蒸気噴射を停止し(ST6)、その後液体材料吐出のみを行い(ST7)、一定時間t2経過時点で蒸気噴射を再開して(ST8)、塗布終了まで液体材料吐出とともに蒸気噴射を続ける。例えば一定時間t1、t2は塗布速度や領域A1,A2の幅などの条件に応じて設定される。
【0029】
このとき、ステージ2が回転機構3により回転し、そのステージ2上の基板Wが回転している状態で、塗布ヘッド4が基板Wの中央である開始位置からX軸方向に、すなわち基板Wの中心から外周に向かって等速で移動する。そして、蒸気ノズル8から蒸気を噴射するとともに材料吐出ノズル7から液体材料を連続して基板Wの塗布面に吐出し、その塗布面上に渦巻状に材料を塗布する(スパイラル塗布)。これにより、基板Wの塗布面上に塗布膜Mが形成される。
【0030】
この移動に伴って、図6に示すように、領域A1,A2においては、まず前処理として液体材料の塗布に先立って塗布方向前方に位置するノズル8から蒸気噴射が行われ、その直後にノズル7から液体材料の吐出が行われることとなる。
【0031】
ここでは両方のノズル7,8からそれぞれ連続的に吐出及び噴射を行うが、ノズル7,8は塗布方向において前後に位置ずれ配置されているため、基板W上には、開始位置P1から終了位置P2に至る渦巻き状の塗布軌跡の各箇所において蒸気噴射と液体塗布が順次行われることとなる。
【0032】
次に、あらかじめ設定された所定位置または所定時間に達したか否かが判断され(ST9)、塗布完了直前の所定位置または所定時間でないと判断された場合には(ST9のN)、塗布処理が続行される。例えば円形の基板Wにおいては外側端部を終了位置P2とする。終了位置P2に到達したら、液体吐出及び蒸気噴射を終了し、塗布処理を終了する(ST10)。
【0033】
塗布終了後、塗布ヘッド4が移動機構5により上昇する(ST11)。そして、基板W上の塗布膜Mが観察装置により観察、すなわち検査され、塗布膜Mに抜けが発生したか否か、塗布膜Mの異物の有無、膜厚異常の有無、塗布膜Mのエッジ部Meの形状等が監視され、必要な場合には部分塗布を行うリペア処理が成され、処理が終了する。
【0034】
本実施形態の塗布装置及び塗布方法によれば、塗布時に溶媒蒸気を噴射することで塗布液の粘性やぬれ性を変化させて膜厚を制御することが可能となる。
【0035】
例えば塗布材料吐出の直前に親和性や相溶性を有する液体の蒸気を予め噴射すると、基板上における濡れ性が向上するため、その直後に塗布される液体材料が広がりやすくなる。したがって、膜厚が均一となり、ウェハ基板W全体の均一性が向上する。
【0036】
また、本実施形態では局所的に溶媒蒸気噴射のタイミングを制御することにより局所的に噴射を行うことが可能であるため、特に基板の回転遠心力や定量ポンプの慣性力などの影響で膜厚が厚くなりやすい塗布開始点である中心位置や、塗布終了点であるエッジ部において、局所的に蒸気噴射を行うことで、膜厚を制御して均一とすることが可能となる。したがって、局所的に膜厚が厚くなることによって後の露光・現像工程で生じる不良を回避できる。
【0037】
本実施形態の塗布装置及び塗布方法では、溶媒噴射ノズルと材料吐出ノズルとを一体として移動させながら塗布及び溶媒蒸気噴射を行うことにより、タイミングの差を縮めるとともにタイミング制御を容易にすることができる。したがって、乾燥による揮発や変質が生じる前に処理を行うことができる。また、蒸気を供給することにより微量の溶媒を基板または塗布された液面の表面に均一に供給することが可能となる。
【0038】
回転軸を中心として両側にノズル7、8を配置するとともに塗布ヘッド4を回転させて角度を変えることで複数のノズル7,8の前後の位置関係を変更できる。したがって、単純な構成で材料や環境に応じて溶媒供給のタイミングを容易に変更することができる。
【0039】
また、液体塗布処理と並行して蒸気噴射処理を進めることができるため、処理時間を短縮できる。また、蒸気噴射のタイミングを制御することにより局所的な処理が可能である。
【0040】
なお、本発明は上記実施形態に限られるものではない。例えば上記第1実施形態においては、蒸気噴射ノズル8を材料吐出ノズル7よりも塗布方向前方の位置に配置し、材料塗布の前に蒸気噴射を行う例を示したが、これに限られるものではない。例えば図4に示すように塗布ヘッド4を回転させて前後関係を逆転させることで、逆の順序での処理が可能となる。塗布材料吐出の直後に相溶性を有する液体の蒸気を噴射すると、塗布材料の粘性が低下するため、液体材料が広がりやすくなる。したがって、膜厚が均一となり、ウェハ基板W全体の均一性が向上する。
【0041】
例えば上記実施形態では膜厚形状が変動しやすい塗布開始地点及び塗布終了地点において、局所的に蒸気噴射を行って膜厚制御する場合を例示したが、これに限られるものではなく、他の部位を局所的に蒸気噴射してもよく、また基板Wの全面に対して均一に蒸気噴射を行うこととしてもよい。蒸気噴射量を調整可能に構成し、塗布部位に応じて複数段階で蒸気噴射量を制御してもよい。
【0042】
上記第1実施形態では円形の基板Wにらせん状の軌跡を描きながら塗布するスパイラル塗布装置及びスパイラル塗布方法を例示したが、これに限られるものではない。例えば図1、図7に示すように、他の実施形態の塗布装置100及び塗布方法として、矩形の基板W2に対して、直線上に相対移動させながら材料吐出及び上記噴射を行い、直線上の軌跡に沿って相対移動させながら塗布および蒸気噴射を行うこととしてもよい。
【0043】
なお、図1に示す塗布装置100において、塗布方向に沿ってノズル7,8を並列させるとともに、塗布ヘッド4毎X方向及びY方向に移動可能とすることで、本実施形態の直線上の軌跡に相対移動させることができ、基板W2の塗布処理を行うことが可能である。
【0044】
この場合にも上記第1実施形態と同様の効果が得られる。すなわち、塗布ヘッド4には材料吐出ノズル7と蒸気噴射ノズル8を一体に備え、これらノズル7,8を一体として移動可能にしたことにより、基板W2に対して蒸気噴射処理と塗布処理とを順次行うことができる。また、回転により前後位置関係を逆転可能とするとともに離間距離dを調節可能であるため処理順序及び処理間隔を調整することができる。
【0045】
本発明の実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0046】
W、W2…基板、M…塗布膜、1、100…塗布装置、2a…載置面、2…ステージ、3…回転機構、4…塗布ヘッド、5…移動機構、6…回転軸、7…材料吐出ノズル、
7b…ノズル孔、8…蒸気噴射ノズル、8b…ノズル孔、9…連結部、10…制御部。
【特許請求の範囲】
【請求項1】
塗布対象物を支持するステージと、
前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に塗布材料を吐出する材料吐出部と、前記材料吐出部とともに前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に気体を噴射する気体噴射部と、を一体に備える塗布ヘッドと、
を備えたことを特徴とする塗布装置。
【請求項2】
前記塗布ヘッドは、前記材料吐出部と前記気体噴射部との離間距離が調節可能であるとともに、前記ステージの面に直交する回転軸を中心に回転可能に構成され、
前記回転により、前記材料吐出部と前記気体噴射部との前後位置を変更可能であることを特徴とする請求項1記載の塗布装置。
【請求項3】
塗布対象物に対して塗布ヘッドを相対移動させながら、前記塗布ヘッドに設けられた材料吐出部から塗布材料を吐出するとともに、前記塗布ヘッドに設けられた気体噴射部から気体を供給することを特徴とする塗布方法。
【請求項4】
前記気体噴射部が前記液体吐出部の塗布方向の前方に配置された状態で、前記相対移動に伴って、前記気体の噴射と前記材料吐出とが塗布対象物に順次行われ、
前記気体は前記塗布材料の溶媒、前記塗布材料に対して相溶性がある液体、または前記塗布材料に対して親和性を有する材料を含有した液体、の蒸気であることを特徴とする請求項3記載の塗布方法。
【請求項5】
前記気体噴射部が前記液体吐出部の塗布方向の後方に配置された状態で、前記相対移動に伴って、前記材料吐出と前記気体の噴射とが塗布対象物に順次行われ、
前記気体は前記塗布材料の溶媒、または前記塗布材料に対して相溶性がある液体、の蒸気であることを特徴とする請求項3記載の塗布方法。
【請求項1】
塗布対象物を支持するステージと、
前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に塗布材料を吐出する材料吐出部と、前記材料吐出部とともに前記ステージに対して相対移動可能であり、前記ステージ上の塗布対象物に気体を噴射する気体噴射部と、を一体に備える塗布ヘッドと、
を備えたことを特徴とする塗布装置。
【請求項2】
前記塗布ヘッドは、前記材料吐出部と前記気体噴射部との離間距離が調節可能であるとともに、前記ステージの面に直交する回転軸を中心に回転可能に構成され、
前記回転により、前記材料吐出部と前記気体噴射部との前後位置を変更可能であることを特徴とする請求項1記載の塗布装置。
【請求項3】
塗布対象物に対して塗布ヘッドを相対移動させながら、前記塗布ヘッドに設けられた材料吐出部から塗布材料を吐出するとともに、前記塗布ヘッドに設けられた気体噴射部から気体を供給することを特徴とする塗布方法。
【請求項4】
前記気体噴射部が前記液体吐出部の塗布方向の前方に配置された状態で、前記相対移動に伴って、前記気体の噴射と前記材料吐出とが塗布対象物に順次行われ、
前記気体は前記塗布材料の溶媒、前記塗布材料に対して相溶性がある液体、または前記塗布材料に対して親和性を有する材料を含有した液体、の蒸気であることを特徴とする請求項3記載の塗布方法。
【請求項5】
前記気体噴射部が前記液体吐出部の塗布方向の後方に配置された状態で、前記相対移動に伴って、前記材料吐出と前記気体の噴射とが塗布対象物に順次行われ、
前記気体は前記塗布材料の溶媒、または前記塗布材料に対して相溶性がある液体、の蒸気であることを特徴とする請求項3記載の塗布方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−66864(P2013−66864A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208426(P2011−208426)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]