
塗装作業訓練装置
【課題】塗装ブース以外でもハンドガンの移動速度を習得し得るようにする。
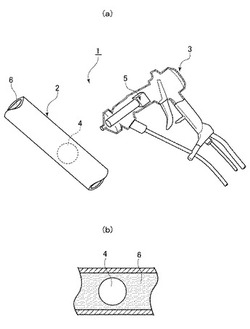
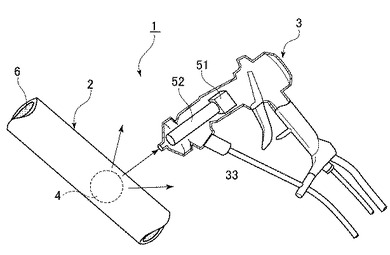
【解決手段】塗装作業訓練装置1は、例えば被塗物側の軌跡に沿って配置されるチューブ2と、例えば塗装機側に配置されるハンドガン3とを備えている。チューブ2内には発光体4が水等の流体6と共に移動可能に収容されている。ハンドガン3には発光体4からの光を受光する受光器5が配設されている。チューブ2は、透明若しくは半透明のチューブから成り、当該チューブ2の一端部には、流体6を供給し、吸引するためのポンプが連結され、他端部には、流体6の供給と吸引に対応してスライド伸縮するバックが連結されている。
【解決手段】塗装作業訓練装置1は、例えば被塗物側の軌跡に沿って配置されるチューブ2と、例えば塗装機側に配置されるハンドガン3とを備えている。チューブ2内には発光体4が水等の流体6と共に移動可能に収容されている。ハンドガン3には発光体4からの光を受光する受光器5が配設されている。チューブ2は、透明若しくは半透明のチューブから成り、当該チューブ2の一端部には、流体6を供給し、吸引するためのポンプが連結され、他端部には、流体6の供給と吸引に対応してスライド伸縮するバックが連結されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、塗装作業訓練装置に係わり、特に、バンパー塗装等の塗装作業を習熟するための塗装作業訓練装置に関する。
【背景技術】
【0002】
一般に、バンパー等の塗装を行うに際しては、作業者が生産ラインで正式に塗装作業を行う前に、塗装作業を習熟させるための訓練が行われている。
【0003】
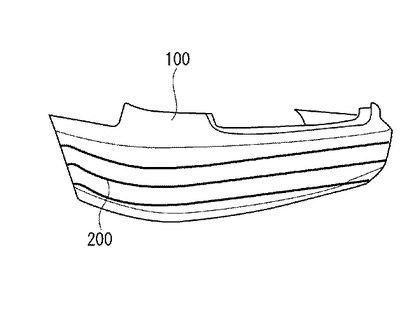
従来から、この種の塗装作業の訓練は図9に示すようにして行われている。先ず、バンパー等の被塗物面100には、予め塗装機(不図示)の移動の軌跡200が描かれており、また、図示しない塗装ハンドガン(不図示)の先端部にはバンパー等の被塗物と塗装機の距離と同じ長さの棒体(不図示)が取り付けられている。
【0004】
しかして、作業者が棒体の先端部をバンパー等の被塗物面100に対して直交させた状態で被塗物面100に摺接させながら軌跡200に沿って移動させることで塗装作業の習熟が行われる。
【0005】
しかしながら、このような実際に塗料の噴霧を行わないバンパー塗装等の塗装作業訓練においては、作業者は移動軌跡200に沿った塗装ハンドガンの動かし方を習得できるものの、次のような難点があった。
【0006】
第1に、塗装ハンドガンの動かし方の習得のみとなり、塗装パターン幅(塗り幅)を体得することができない。
【0007】
第2に、このような塗装作業訓練によれば、バンパーのように被塗物が平面である場合には容易に行うことができるものの、実際の手吹き塗装においては、ボディー塗装の補正や内板塗装も行う必要があることから、ドア内面板面のような隠れた場所への塗料を入り込ませるための訓練ができない。
【0008】
第3に、このような塗装作業訓練では、実際に塗料を用いないことから、噴霧している塗料の軌跡を見ることができず、作業者は塗装作業の臨場感を習得することができない。
【0009】
なお、このようなバンパー塗装の作業訓練装置については、記載すべき先行技術文献情報は見当たらない。
【0010】
一方、他の塗装技術としては、先端に塗装機を取り付けるための多軸ロボットアームを備えた塗装ロボットで塗装するティーチング装置が知られているが(例えば、特許文献1、2参照)、かかるティーチング装置は、ロボットのティーチングに主眼をおいていることから、数値情報は得られるものの、直接作業者が塗装作業を理解することができず、また塗装作業を理解しながら塗装作業を平行して行うことができないという難点があった。
【0011】
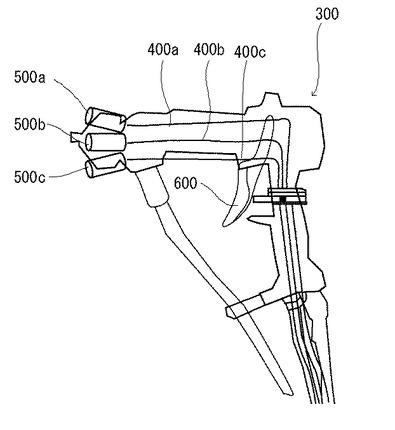
このため、本出願人は、先に、図10に示すように、ハンドガン本体300と、ハンドガン本体300内に配設される複数条のレーザー導入光ファイバケーブル400a、400b、400cと、各レーザー導入光ファイバケーブル400a、400b、400cの先端部にそれぞれ設けられ、ハンドガン本体300の先端部に離間して配置されるプローブ500a、500b、500cとを備える塗装作業訓練装置を案出し、出願している(特願2009−056987号)。なお、図中、符号600はトリガーを示している。
【0012】
このような塗装作業訓練装置によれば、次のような効果がある。
【0013】
第1に、塗料に代えて、プローブ500a、500b、500cの先端部からレーザー光を出射することができることから、局所排気装置(局排)や空調のない環境下でも使用することができる。
【0014】
第2に、レーザー光をレーザー導入光ファイバケーブル400a、400b、400cで誘導していることから、実施場所が防爆に指定されていても使用することができる。
【0015】
第3に、隠れた場所への塗料の入り込みは、レーザー光が入るか否かで確認できることから、ドア内板面のように、塗装面が影になりそうな場合でも事前に確認することができる。
【0016】
第4に、ハンドガン本体300の先端部に水を噴霧するためのノズルを設けた場合には、ノズルから水を噴射させレーザー光を照射すると、水の噴霧による光の散乱で光の軌跡を目視することができ、また、実際の塗装の臨場感を得ることができる。
【0017】
第5に、各プローブ500a、500b、500cから、帯状または楕円状のレーザー光を出射させる場合には、被塗物に照射されるレーザー光を同一線上に位置するように調整することで、塗装パターン幅、塗装の塗り重ね部、ハンドガンと被塗物の距離およびハンドガンの傾きを確認することができる。
【0018】
しかしながら、このような構成の塗装作業訓練装置においては、ハンドガンの移動速度を習得することができないという難点があった。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開平10−264059号公報
【特許文献2】特開平10−264060号公報
【発明の開示】
【発明が解決しようとする課題】
【0020】
本発明は、上述の難点を解決するためになされたもので、塗装ブース以外でもハンドガンの移動速度(塗装機の移動速度)を習得することができる塗装作業訓練装置を提供することを目的としている。
【課題を解決するための手段】
【0021】
本発明の第1の態様である塗装作業訓練装置は、所定の軌跡に沿って配置されるチューブと、チューブから離間した位置に配置されるハンドガンとを備え、チューブ内には発光体が移動可能に収容され、ハンドガンには発光体からの光を受光する受光器が配設されているものである。
【0022】
第1の態様である塗装作業訓練装置によれば、被塗物側の軌跡に沿って配置されるチューブと、塗装機側に配置されるハンドガンとを備え、チューブ内には発光体が移動可能に収容され、ハンドガンには発光体からの光を受光する受光器が配設されていることから、チューブ内の発光体を既定の速度(450〜500nm/sec程度)と同一の速度で移動させると共に、当該発光体からの光をハンドガンの受光器で受光することで、訓練者はハンドガンの移動速度を容易に習得することができる。
【0023】
本発明の第2の態様は、第1の態様である塗装作業訓練装置において、チューブは、透明若しくは半透明のチューブから成るものである。
【0024】
第2の態様である塗装作業訓練装置によれば、第1の態様である塗装作業訓練装置の作用・効果に加え、訓練者はチューブ内に収容された発光体の移動を容易に確認することができる。
【0025】
本発明の第3の態様は、第1の態様または第2の態様である塗装作業訓練装置において、チューブ内には流体が充填されているものである。
【0026】
第3の態様である塗装作業訓練装置によれば、第1の態様または第2の態様である塗装作業訓練装置の作用・効果に加え、チューブ内の流体を移動させることで、発光体を移動させることができる。
【0027】
本発明の第4の態様は、第3の態様である塗装作業訓練装置において、チューブの一端部には、流体を供給し、吸引するためのポンプが連結され、チューブの他端部には、流体の供給と吸引に対応してスライド伸縮するバックが連結されているものである。
【0028】
第4の態様である塗装作業訓練装置によれば、第3の態様の塗装作業訓練装置の作用・効果に加え、ポンプを構成するシリンダーの回転をシリンダー移動量とすることで、流体の移動、ひいては発光体の移動に脈動が生ぜず、定量性に優れた速度制御を行うことができる。
【0029】
本発明の第5の態様は、第4の態様である塗装作業訓練装置において、チューブ内のポンプ側およびバック側にはそれぞれストレーナが配設されているものである。
【0030】
第5の態様である塗装作業訓練装置によれば、第4の態様の塗装作業訓練装置の作用・効果に加え、発光体がポンプ内やバック内に流入することを防止することができる。
【0031】
本発明の第6の態様は、第1の態様乃至第5の態様の何れかの態様である塗装作業訓練装置において、受光器は、発光体からの光を受光する受光器本体と、受光器本体の前部側に配置される筒状体とを備えるものである。
【0032】
第6の態様である塗装作業訓練装置によれば、第1の態様乃至第5の態様の何れかの態様の塗装作業訓練装置の作用・効果に加え、訓練場における照明等のノイズによる影響を抑えることができる。
【0033】
本発明の第7の態様は、第6の態様である塗装作業訓練装置において、ハンドガンは、発光体が筒状体の軸線上にあるとき、または軸線上にないときに作動する報知手段を備えているものである。
【0034】
第7の態様である塗装作業訓練装置によれば、第1の態様乃至第6の態様の何れかの態様の塗装作業訓練装置の作用・効果に加え、訓練者は報知手段としてのパトライト等が点灯しなければ、ハンドガンの先端部が正面に向けられた状態にあるものと判断してハンドガンを移動することができる。
【発明の効果】
【0035】
本発明の第1の態様乃至第7の態様の塗装作業訓練装置によれば、被塗物側の軌跡に沿って配置されるチューブと、塗装機側に配置されるハンドガンとを備え、チューブ内には発光体が移動可能に収容され、ハンドガンには発光体からの光を受光する受光器が配設されていることから、チューブ内の発光体を既定の速度(450〜500mm/sec)と同一の速度で移動させると共に、当該発光体からの光をハンドガンの受光器で受光することで、訓練者はハンドガンの移動速度を容易に習得することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の塗装作業訓練装置の一例を示す模式図で、分図(a)はチューブとハンドガンの斜視図、分図(b)はチューブの縦断面図である。
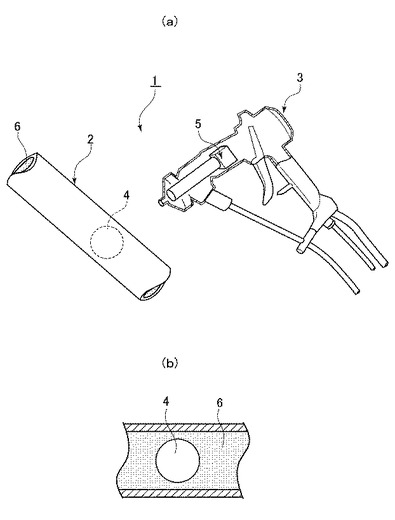
【図2】本発明の塗装作業訓練装置におけるチューブの一例を示す模式図で、分図(a)はチューブの両端部にポンプやバックが連結された状態を示す説明図、分図(b)はチューブ内のポンプ側に第1のストレーナを配設した状態を示す説明図、分図(c)はチューブ内のバック側に第2のストレーナを配設した状態を示す説明図である。
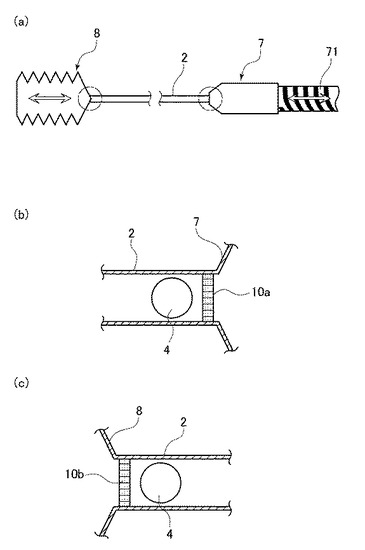
【図3】本発明の塗装作業訓練装置における発光体の一例を示す断面図。
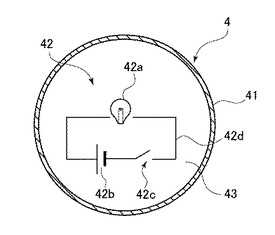
【図4】本発明の塗装作業訓練装置における軌跡の説明図。
【図5】本発明の塗装作業訓練装置におけるチューブの配置状況の一例を示す模式図。
【図6】本発明の塗装作業訓練装置におけるハンドガンの一例を示す斜視図。
【図7】本発明の塗装作業訓練装置における受光器の一例を示す斜視図。
【図8】本発明の塗装作業訓練装置の使用状況を示す説明図。
【図9】従来のハンドガンにおける被塗部の軌跡を示す説明図。
【図10】従来の塗装作業訓練装置を示す説明図。
【発明を実施するための形態】
【0037】
以下、本発明の塗装作業訓練装置を適用した最良の実施の形態例について、図面を参照して説明する。
【0038】
図1は、本発明の実施例における塗装作業訓練装置の一例を示す模式図である。
【0039】
図1(a)において、本発明における塗装作業訓練装置1は、所定の軌跡、例えばバンパー等の被塗物側の軌跡に沿って配置されるチューブ2と、当該チューブ2から離間した位置、例えば塗装機側に配置されるハンドガン3とを備えており、チューブ2内には発光体4が移動可能に収容され、ハンドガン3には発光体4からの光を受光する受光器5が配設されている。
【0040】
チューブ2は、図1(b)に示すように、可視光領域で透明若しくは半透明なナイロン(登録商標)チューブや軟質フッ素樹脂チューブ等に代表されるプラスチック製のチューブで構成されている。チューブ2の内径は、後述する発光体4をチューブ2内において移動可能に配置するに十分な寸法、例えば40〜42mm程度とされている。なお、チューブ2の肉厚は、チューブ2の材質と加工との関係で適宜決定される。
【0041】
このような構成のチューブ2内には水などから成る流体6が充填されている。これにより、後述するポンプ7(図2参照)の流量制御を自動で行うことで、発光体4の移動速度を制御することができる。
【0042】
チューブ2の一端部には、図2(a)に示すように、チューブ2内に流体6を供給し、またはチューブ2内の流体6吸引するためのポンプ7が液密に連結され、他端部には流体6の供給や吸引に対応してスライド伸縮するバック8が液密に連結されている。
【0043】
ポンプ7は、例えばロボシリンダー等から成るシリンダー71を備えており、当該シリンダー71を回転させることでシリンダーが軸方向に移動(スライド)し、すなわち回転をシリンダー移動量とすることで定量性を確保することができる。これにより、流体6の移動、ひいては発光体4の移動に脈動が生ぜず、定量性に優れた速度制御を行うことができる。
【0044】
また、チューブ2内のポンプ7側近傍には、図2(b)に示すように、第1のストレーナー10aが配設され、チューブ2内のバック8側近傍には、図2(c)に示すように、第2のストレーナー10bが配設されている。このような第1、第2のストレーナー10a、10bをチューブ2内に配設することで、発光体4がポンプ7内やバック8内に流入することを防止することができる。
【0045】
図3は、発光体4の断面図を示している。
【0046】
同図において、発光体4は、可視光領域に対して透明若しくは半透明とされ、直径が40mm程度とされた球状のケース41と、当該ケース41内に収容される発光部42と、ケース41内に充填される充填部材43とを備えており、全体として球状のLEDウキ(電気ウキ)を呈している。
【0047】
ケース41は、流体として水を使用する場合はアクリル樹脂やポリエチレンテレフタレート(PET)樹脂等の加工性が良好で安価な材料で形成されている。
【0048】
発光部42は、発光部材としてのLED42aと、当該LED42aに電源を供給する電池42bと、必要により設けられるスイッチ42cとを備えており、これらの電池42bおよびスイッチ42cはリード線42dを介してLED42aに接続されている。ここで、LED42aの光度は、受光器5側のアンプも含めて調整され、このような調整により、訓練作業場における照明等の外乱の影響を低減することができる。
【0049】
充填部材43は、発光体4が周囲の流体(水などの液体)と比重が同じになるようにするために充填するもので、液体や樹脂等で構成されている。当該液体や樹脂としては、遮光させないため透明であるもの、LED42aや電池42bに対して電気的に絶縁性を有しているものを使用する必要があり、また、LED42aは、極力、ケース41の表面側に位置するようにバランズを取ることが好ましい。
【0050】
このような構成の発光体4は、チューブ2内に、水などの流体6の移動に伴って移動可能に配設されている。また、発光体4は水などの流体6の中で円滑に移動させるため、沈降や浮上が起きない程度に重量調整することが好ましい。発光体4の重量は、発光体4の直径が40mm程度で流体として水を使用する場合には、全体として33〜34g程度とすることが好ましい。
【0051】
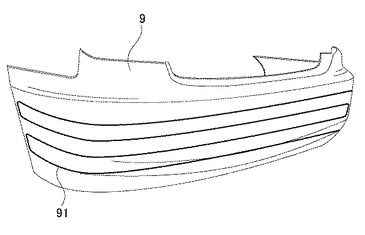
このような発光体4が移動可能に収容されたチューブ2は、図4に示すようにバンパー等の被塗物9の表面に軌跡91に沿って這わせられている。なお、当該チューブ2はバインド線(不図示)などにより被塗物9等に固定されている。
【0052】
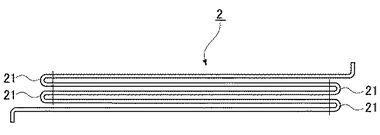
当該チューブ2は、図5に示すように、一筆書き状態で配置されることになる。なお、一筆書き状態のチューブ2のうち、軌跡91の曲がり部に対応する箇所には予めU字状のチューブ21が液密に連結することが好ましい。
【0053】
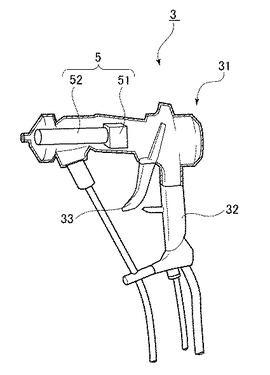
ハンドガン3は、図6に示すように、幅寸法Hが40mm程度のハンドガン本体31と、ハンドガン本体31の後端部近傍の下面に下方に向けて突設されたグリップ32と、グリップ32の前部位置でハンドガン本体31に軸支されたトリガー33と、ハンドガン本体31内に配置された受光器5とを備えている。
【0054】
受光器5は、発光体4からの光を受光する受光器本体51と、受光器本体51の前部側(発光体4と対向する側)にハンドガン本体31の軸線と同心状に配設される筒状体51とを備えている。受光器5は、ノイズ除去のため、特定の波長が特定の強度以上で受光したときを適正な受光状態とみなすように設定されている。具体的には、受光器本体51が、受光器本体51に対して610〜660nm程度(ピーク値635nm)の光(赤)を感知する一定値以上の強度の光が到達したときのみ検知するように設定されている。これにより、訓練場における照明等のノイズによる影響を抑えることができる。
【0055】
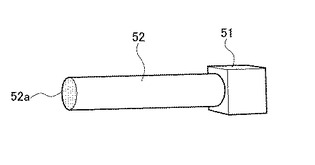
筒状体としては、図7に示すように、外径が10mm程度で、軸方向の長さが100mm程度とされた円筒体52が使用され、当該円筒体52の内面には黒色塗料52aが塗装されている。ここで、受光器本体51の前部位置(発光体4と対向する側)に所定長の円筒体52を配設するのは、特定方向以外からの光の受光を防止するためである。具体的には、ハンドガン3が発光体4に対して正面に向けられていない場合の光、すなわち、訓練場においては、様々な方向から光が放射されるところ、受光器本体51の軸線、ひいては円筒体52の軸線と、発光体4から放射される光のうち被塗物面と直交する方向の光と一致しない光の入射を防止するためである。また、円筒体52の内面に黒色塗料を塗装するのは、ハンドガン3が発光体4に対して正面に向けられていない場合にノイズとして入射する光が円筒体内において反射するのを防止するためである。
【0056】
次に、このように構成された塗装作業訓練装置1の動作について説明する。
【0057】
図8において、先ず、準備時は流体6を吸引しておき、実際の使用に際しては、泡の混入も問題になるため、脱気を行なうことが好ましい。具体的には、バック8を強制的にスライドさせることでチューブ2内の圧力が下がり、これにより、水などの流体6中に溶存している気体の殆どを除去することができる。
【0058】
次に、訓練時において、ポンプ7から流体6を供給すると、チューブ2内の流体6がバック8側に向かって移動し、この流体6の移動に伴って発光体4も移動することになる。
【0059】
一方、訓練者がハンドガン3の先端部、すなわちハンドガン本体31の発光体4と対向する部位がチューブ2内の発光体4に対して正面に向くように配置した上で、ハンドガン3のトリガ−33を引く。これにより、受光器5のスイッチがオンとなり、ハンドガン3に内蔵されたタイマー(不図示)が作動する。
【0060】
そして、訓練者がハンドガン3の先端部を正面に向けた状態で発光体4の移動に合わせて移動させ、発光体4が停止した時点でハンドガン3のトリガー33を離す。これにより、受光器5のスイッチがオフとなり、訓練者が軌跡に沿ってハンドガン3を移動させた距離、すなわち、発光体4の移動に合わせて移動させた軌跡の長さ(チューブ2の長さ)とタイマーの累積時間とから訓練者におけるハンドガンの移動速度が得られる。
【0061】
ここで、本発明においては、ハンドガン3のトリガ−33を引いた状態がハンドガン3の動作状態とされ、訓練者がハンドガン3の先端部を正面に向けた状態のときに、すなわち、ハンドガン3の筒状体52の軸線上に発光体4があるときに、発光体4からの光が受光されるように設定されていることから、受光器本体51が発光体4からの光を受光しているときは、ハンドガン3は発光体4の動きに同期しているものとみなすことができる。この場合、受光器本体51が発光体4からの光を受光していないときは、すなわち、ハンドガン3に、ハンドガン3の先端部が正面を向いていない場合(ハンドガン3の筒状体52の軸線上に発光体4がないとき)やハンドガン3が発光体4の移動速度と一致していないとき(ハンドガン3が発光体4の移動速度より遅いとき若しくは早いとき)に作動する報知手段、例えばリレーを用いた回路でパトライトをON−OFF(パトライトの点灯・点滅)させる手段を装備させておけば、ハンドガン3の移動が理想とする速度から逸脱しているものと判断することができる。これにより、訓練者は報知手段が作動しなければ(例えば、パトライトが点灯しなければ)ハンドガン3の先端部が正面に向けられた状態にあるものと判断して、ハンドガン3を理想とする速度で移動させることができる。なお、ハンドガン3の理想とする速度は、既定の速度と略同一の速度(450〜500mm/sec程度)とされている。ハンドガン3の速度は、人手作業による作業作度のムラ(1台の被塗物を塗装する場合、速度の上下が発生し、当該速度は1台ごとに相違している)を発生させないようにする観点から、450〜500mm/sec程度とされている。
【0062】
以上述べたように、本発明の塗装作業訓練装置1によれば、チューブ2内の発光体4の移動速度を既定の速度(450〜500mm/sec程度)と合致させ、訓練者が発光体4の移動速度に合わせてハンドガン3を移動させることで、ハンドガン3の移動速度を習得することができる。
【0063】
なお、これまで本発明について、図面に示した特定の実施の形態をもって本発明を説明しているが、本発明はこれらの実施の形態に限定されるものではなく、本発明の効果を奏する限り、これまで知られているいかなる構成であっても採用することができる。
【0064】
例えば、前述の実施例では、流体6として水を用いているが、流動性のある液体、例えば有機溶剤やアルコール等の揮発性の溶剤でもよい。但し、流体6として有機溶剤を使用する場合は防爆の処置を施す必要のない溶剤を選定することが好ましく、アセトンや酢酸エチル等の樹脂を溶かす液体、あるいは強酸、強アルカリ性の溶剤の場合は、発光部を構成するケースやチューブの材質に対する制約が多くなり、また、流体6としてアルコール等の揮発性の溶剤を使用する場合は、チューブの密閉度が低い場合は流体の容積変化を起したり、夏季に気化を起こし、破裂することがないように留意する必要がある。
【0065】
また、前述の実施例では、円筒体を使用しているが、例えば先端部から後端側に向かって縮径するラッパ状の筒や六角筒もしくは四角筒などを使用してもよい。
【0066】
さらに、前述の実施例では、ハンドガン3の先端部が正面を向いていない場合に、報知手段としてのパトライトを点灯させているが、ハンドガン3の先端部が正面を向いている場合に、報知手段としてのパトライトを点灯・点滅させてもよい。
【符号の説明】
【0067】
1・・・塗装作業訓練装置
2・・・チューブ
3・・・ハンドガン
4・・・発光体
42a・・・LED
5・・・受光器
51・・・受光器本体
52・・・筒状体
6・・・流体
7・・・ポンプ
8・・・バック
10a・・・第1のストレーナ
10b・・・第2のストレーナ
91・・・軌跡
【技術分野】
【0001】
本発明は、塗装作業訓練装置に係わり、特に、バンパー塗装等の塗装作業を習熟するための塗装作業訓練装置に関する。
【背景技術】
【0002】
一般に、バンパー等の塗装を行うに際しては、作業者が生産ラインで正式に塗装作業を行う前に、塗装作業を習熟させるための訓練が行われている。
【0003】
従来から、この種の塗装作業の訓練は図9に示すようにして行われている。先ず、バンパー等の被塗物面100には、予め塗装機(不図示)の移動の軌跡200が描かれており、また、図示しない塗装ハンドガン(不図示)の先端部にはバンパー等の被塗物と塗装機の距離と同じ長さの棒体(不図示)が取り付けられている。
【0004】
しかして、作業者が棒体の先端部をバンパー等の被塗物面100に対して直交させた状態で被塗物面100に摺接させながら軌跡200に沿って移動させることで塗装作業の習熟が行われる。
【0005】
しかしながら、このような実際に塗料の噴霧を行わないバンパー塗装等の塗装作業訓練においては、作業者は移動軌跡200に沿った塗装ハンドガンの動かし方を習得できるものの、次のような難点があった。
【0006】
第1に、塗装ハンドガンの動かし方の習得のみとなり、塗装パターン幅(塗り幅)を体得することができない。
【0007】
第2に、このような塗装作業訓練によれば、バンパーのように被塗物が平面である場合には容易に行うことができるものの、実際の手吹き塗装においては、ボディー塗装の補正や内板塗装も行う必要があることから、ドア内面板面のような隠れた場所への塗料を入り込ませるための訓練ができない。
【0008】
第3に、このような塗装作業訓練では、実際に塗料を用いないことから、噴霧している塗料の軌跡を見ることができず、作業者は塗装作業の臨場感を習得することができない。
【0009】
なお、このようなバンパー塗装の作業訓練装置については、記載すべき先行技術文献情報は見当たらない。
【0010】
一方、他の塗装技術としては、先端に塗装機を取り付けるための多軸ロボットアームを備えた塗装ロボットで塗装するティーチング装置が知られているが(例えば、特許文献1、2参照)、かかるティーチング装置は、ロボットのティーチングに主眼をおいていることから、数値情報は得られるものの、直接作業者が塗装作業を理解することができず、また塗装作業を理解しながら塗装作業を平行して行うことができないという難点があった。
【0011】
このため、本出願人は、先に、図10に示すように、ハンドガン本体300と、ハンドガン本体300内に配設される複数条のレーザー導入光ファイバケーブル400a、400b、400cと、各レーザー導入光ファイバケーブル400a、400b、400cの先端部にそれぞれ設けられ、ハンドガン本体300の先端部に離間して配置されるプローブ500a、500b、500cとを備える塗装作業訓練装置を案出し、出願している(特願2009−056987号)。なお、図中、符号600はトリガーを示している。
【0012】
このような塗装作業訓練装置によれば、次のような効果がある。
【0013】
第1に、塗料に代えて、プローブ500a、500b、500cの先端部からレーザー光を出射することができることから、局所排気装置(局排)や空調のない環境下でも使用することができる。
【0014】
第2に、レーザー光をレーザー導入光ファイバケーブル400a、400b、400cで誘導していることから、実施場所が防爆に指定されていても使用することができる。
【0015】
第3に、隠れた場所への塗料の入り込みは、レーザー光が入るか否かで確認できることから、ドア内板面のように、塗装面が影になりそうな場合でも事前に確認することができる。
【0016】
第4に、ハンドガン本体300の先端部に水を噴霧するためのノズルを設けた場合には、ノズルから水を噴射させレーザー光を照射すると、水の噴霧による光の散乱で光の軌跡を目視することができ、また、実際の塗装の臨場感を得ることができる。
【0017】
第5に、各プローブ500a、500b、500cから、帯状または楕円状のレーザー光を出射させる場合には、被塗物に照射されるレーザー光を同一線上に位置するように調整することで、塗装パターン幅、塗装の塗り重ね部、ハンドガンと被塗物の距離およびハンドガンの傾きを確認することができる。
【0018】
しかしながら、このような構成の塗装作業訓練装置においては、ハンドガンの移動速度を習得することができないという難点があった。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開平10−264059号公報
【特許文献2】特開平10−264060号公報
【発明の開示】
【発明が解決しようとする課題】
【0020】
本発明は、上述の難点を解決するためになされたもので、塗装ブース以外でもハンドガンの移動速度(塗装機の移動速度)を習得することができる塗装作業訓練装置を提供することを目的としている。
【課題を解決するための手段】
【0021】
本発明の第1の態様である塗装作業訓練装置は、所定の軌跡に沿って配置されるチューブと、チューブから離間した位置に配置されるハンドガンとを備え、チューブ内には発光体が移動可能に収容され、ハンドガンには発光体からの光を受光する受光器が配設されているものである。
【0022】
第1の態様である塗装作業訓練装置によれば、被塗物側の軌跡に沿って配置されるチューブと、塗装機側に配置されるハンドガンとを備え、チューブ内には発光体が移動可能に収容され、ハンドガンには発光体からの光を受光する受光器が配設されていることから、チューブ内の発光体を既定の速度(450〜500nm/sec程度)と同一の速度で移動させると共に、当該発光体からの光をハンドガンの受光器で受光することで、訓練者はハンドガンの移動速度を容易に習得することができる。
【0023】
本発明の第2の態様は、第1の態様である塗装作業訓練装置において、チューブは、透明若しくは半透明のチューブから成るものである。
【0024】
第2の態様である塗装作業訓練装置によれば、第1の態様である塗装作業訓練装置の作用・効果に加え、訓練者はチューブ内に収容された発光体の移動を容易に確認することができる。
【0025】
本発明の第3の態様は、第1の態様または第2の態様である塗装作業訓練装置において、チューブ内には流体が充填されているものである。
【0026】
第3の態様である塗装作業訓練装置によれば、第1の態様または第2の態様である塗装作業訓練装置の作用・効果に加え、チューブ内の流体を移動させることで、発光体を移動させることができる。
【0027】
本発明の第4の態様は、第3の態様である塗装作業訓練装置において、チューブの一端部には、流体を供給し、吸引するためのポンプが連結され、チューブの他端部には、流体の供給と吸引に対応してスライド伸縮するバックが連結されているものである。
【0028】
第4の態様である塗装作業訓練装置によれば、第3の態様の塗装作業訓練装置の作用・効果に加え、ポンプを構成するシリンダーの回転をシリンダー移動量とすることで、流体の移動、ひいては発光体の移動に脈動が生ぜず、定量性に優れた速度制御を行うことができる。
【0029】
本発明の第5の態様は、第4の態様である塗装作業訓練装置において、チューブ内のポンプ側およびバック側にはそれぞれストレーナが配設されているものである。
【0030】
第5の態様である塗装作業訓練装置によれば、第4の態様の塗装作業訓練装置の作用・効果に加え、発光体がポンプ内やバック内に流入することを防止することができる。
【0031】
本発明の第6の態様は、第1の態様乃至第5の態様の何れかの態様である塗装作業訓練装置において、受光器は、発光体からの光を受光する受光器本体と、受光器本体の前部側に配置される筒状体とを備えるものである。
【0032】
第6の態様である塗装作業訓練装置によれば、第1の態様乃至第5の態様の何れかの態様の塗装作業訓練装置の作用・効果に加え、訓練場における照明等のノイズによる影響を抑えることができる。
【0033】
本発明の第7の態様は、第6の態様である塗装作業訓練装置において、ハンドガンは、発光体が筒状体の軸線上にあるとき、または軸線上にないときに作動する報知手段を備えているものである。
【0034】
第7の態様である塗装作業訓練装置によれば、第1の態様乃至第6の態様の何れかの態様の塗装作業訓練装置の作用・効果に加え、訓練者は報知手段としてのパトライト等が点灯しなければ、ハンドガンの先端部が正面に向けられた状態にあるものと判断してハンドガンを移動することができる。
【発明の効果】
【0035】
本発明の第1の態様乃至第7の態様の塗装作業訓練装置によれば、被塗物側の軌跡に沿って配置されるチューブと、塗装機側に配置されるハンドガンとを備え、チューブ内には発光体が移動可能に収容され、ハンドガンには発光体からの光を受光する受光器が配設されていることから、チューブ内の発光体を既定の速度(450〜500mm/sec)と同一の速度で移動させると共に、当該発光体からの光をハンドガンの受光器で受光することで、訓練者はハンドガンの移動速度を容易に習得することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の塗装作業訓練装置の一例を示す模式図で、分図(a)はチューブとハンドガンの斜視図、分図(b)はチューブの縦断面図である。
【図2】本発明の塗装作業訓練装置におけるチューブの一例を示す模式図で、分図(a)はチューブの両端部にポンプやバックが連結された状態を示す説明図、分図(b)はチューブ内のポンプ側に第1のストレーナを配設した状態を示す説明図、分図(c)はチューブ内のバック側に第2のストレーナを配設した状態を示す説明図である。
【図3】本発明の塗装作業訓練装置における発光体の一例を示す断面図。
【図4】本発明の塗装作業訓練装置における軌跡の説明図。
【図5】本発明の塗装作業訓練装置におけるチューブの配置状況の一例を示す模式図。
【図6】本発明の塗装作業訓練装置におけるハンドガンの一例を示す斜視図。
【図7】本発明の塗装作業訓練装置における受光器の一例を示す斜視図。
【図8】本発明の塗装作業訓練装置の使用状況を示す説明図。
【図9】従来のハンドガンにおける被塗部の軌跡を示す説明図。
【図10】従来の塗装作業訓練装置を示す説明図。
【発明を実施するための形態】
【0037】
以下、本発明の塗装作業訓練装置を適用した最良の実施の形態例について、図面を参照して説明する。
【0038】
図1は、本発明の実施例における塗装作業訓練装置の一例を示す模式図である。
【0039】
図1(a)において、本発明における塗装作業訓練装置1は、所定の軌跡、例えばバンパー等の被塗物側の軌跡に沿って配置されるチューブ2と、当該チューブ2から離間した位置、例えば塗装機側に配置されるハンドガン3とを備えており、チューブ2内には発光体4が移動可能に収容され、ハンドガン3には発光体4からの光を受光する受光器5が配設されている。
【0040】
チューブ2は、図1(b)に示すように、可視光領域で透明若しくは半透明なナイロン(登録商標)チューブや軟質フッ素樹脂チューブ等に代表されるプラスチック製のチューブで構成されている。チューブ2の内径は、後述する発光体4をチューブ2内において移動可能に配置するに十分な寸法、例えば40〜42mm程度とされている。なお、チューブ2の肉厚は、チューブ2の材質と加工との関係で適宜決定される。
【0041】
このような構成のチューブ2内には水などから成る流体6が充填されている。これにより、後述するポンプ7(図2参照)の流量制御を自動で行うことで、発光体4の移動速度を制御することができる。
【0042】
チューブ2の一端部には、図2(a)に示すように、チューブ2内に流体6を供給し、またはチューブ2内の流体6吸引するためのポンプ7が液密に連結され、他端部には流体6の供給や吸引に対応してスライド伸縮するバック8が液密に連結されている。
【0043】
ポンプ7は、例えばロボシリンダー等から成るシリンダー71を備えており、当該シリンダー71を回転させることでシリンダーが軸方向に移動(スライド)し、すなわち回転をシリンダー移動量とすることで定量性を確保することができる。これにより、流体6の移動、ひいては発光体4の移動に脈動が生ぜず、定量性に優れた速度制御を行うことができる。
【0044】
また、チューブ2内のポンプ7側近傍には、図2(b)に示すように、第1のストレーナー10aが配設され、チューブ2内のバック8側近傍には、図2(c)に示すように、第2のストレーナー10bが配設されている。このような第1、第2のストレーナー10a、10bをチューブ2内に配設することで、発光体4がポンプ7内やバック8内に流入することを防止することができる。
【0045】
図3は、発光体4の断面図を示している。
【0046】
同図において、発光体4は、可視光領域に対して透明若しくは半透明とされ、直径が40mm程度とされた球状のケース41と、当該ケース41内に収容される発光部42と、ケース41内に充填される充填部材43とを備えており、全体として球状のLEDウキ(電気ウキ)を呈している。
【0047】
ケース41は、流体として水を使用する場合はアクリル樹脂やポリエチレンテレフタレート(PET)樹脂等の加工性が良好で安価な材料で形成されている。
【0048】
発光部42は、発光部材としてのLED42aと、当該LED42aに電源を供給する電池42bと、必要により設けられるスイッチ42cとを備えており、これらの電池42bおよびスイッチ42cはリード線42dを介してLED42aに接続されている。ここで、LED42aの光度は、受光器5側のアンプも含めて調整され、このような調整により、訓練作業場における照明等の外乱の影響を低減することができる。
【0049】
充填部材43は、発光体4が周囲の流体(水などの液体)と比重が同じになるようにするために充填するもので、液体や樹脂等で構成されている。当該液体や樹脂としては、遮光させないため透明であるもの、LED42aや電池42bに対して電気的に絶縁性を有しているものを使用する必要があり、また、LED42aは、極力、ケース41の表面側に位置するようにバランズを取ることが好ましい。
【0050】
このような構成の発光体4は、チューブ2内に、水などの流体6の移動に伴って移動可能に配設されている。また、発光体4は水などの流体6の中で円滑に移動させるため、沈降や浮上が起きない程度に重量調整することが好ましい。発光体4の重量は、発光体4の直径が40mm程度で流体として水を使用する場合には、全体として33〜34g程度とすることが好ましい。
【0051】
このような発光体4が移動可能に収容されたチューブ2は、図4に示すようにバンパー等の被塗物9の表面に軌跡91に沿って這わせられている。なお、当該チューブ2はバインド線(不図示)などにより被塗物9等に固定されている。
【0052】
当該チューブ2は、図5に示すように、一筆書き状態で配置されることになる。なお、一筆書き状態のチューブ2のうち、軌跡91の曲がり部に対応する箇所には予めU字状のチューブ21が液密に連結することが好ましい。
【0053】
ハンドガン3は、図6に示すように、幅寸法Hが40mm程度のハンドガン本体31と、ハンドガン本体31の後端部近傍の下面に下方に向けて突設されたグリップ32と、グリップ32の前部位置でハンドガン本体31に軸支されたトリガー33と、ハンドガン本体31内に配置された受光器5とを備えている。
【0054】
受光器5は、発光体4からの光を受光する受光器本体51と、受光器本体51の前部側(発光体4と対向する側)にハンドガン本体31の軸線と同心状に配設される筒状体51とを備えている。受光器5は、ノイズ除去のため、特定の波長が特定の強度以上で受光したときを適正な受光状態とみなすように設定されている。具体的には、受光器本体51が、受光器本体51に対して610〜660nm程度(ピーク値635nm)の光(赤)を感知する一定値以上の強度の光が到達したときのみ検知するように設定されている。これにより、訓練場における照明等のノイズによる影響を抑えることができる。
【0055】
筒状体としては、図7に示すように、外径が10mm程度で、軸方向の長さが100mm程度とされた円筒体52が使用され、当該円筒体52の内面には黒色塗料52aが塗装されている。ここで、受光器本体51の前部位置(発光体4と対向する側)に所定長の円筒体52を配設するのは、特定方向以外からの光の受光を防止するためである。具体的には、ハンドガン3が発光体4に対して正面に向けられていない場合の光、すなわち、訓練場においては、様々な方向から光が放射されるところ、受光器本体51の軸線、ひいては円筒体52の軸線と、発光体4から放射される光のうち被塗物面と直交する方向の光と一致しない光の入射を防止するためである。また、円筒体52の内面に黒色塗料を塗装するのは、ハンドガン3が発光体4に対して正面に向けられていない場合にノイズとして入射する光が円筒体内において反射するのを防止するためである。
【0056】
次に、このように構成された塗装作業訓練装置1の動作について説明する。
【0057】
図8において、先ず、準備時は流体6を吸引しておき、実際の使用に際しては、泡の混入も問題になるため、脱気を行なうことが好ましい。具体的には、バック8を強制的にスライドさせることでチューブ2内の圧力が下がり、これにより、水などの流体6中に溶存している気体の殆どを除去することができる。
【0058】
次に、訓練時において、ポンプ7から流体6を供給すると、チューブ2内の流体6がバック8側に向かって移動し、この流体6の移動に伴って発光体4も移動することになる。
【0059】
一方、訓練者がハンドガン3の先端部、すなわちハンドガン本体31の発光体4と対向する部位がチューブ2内の発光体4に対して正面に向くように配置した上で、ハンドガン3のトリガ−33を引く。これにより、受光器5のスイッチがオンとなり、ハンドガン3に内蔵されたタイマー(不図示)が作動する。
【0060】
そして、訓練者がハンドガン3の先端部を正面に向けた状態で発光体4の移動に合わせて移動させ、発光体4が停止した時点でハンドガン3のトリガー33を離す。これにより、受光器5のスイッチがオフとなり、訓練者が軌跡に沿ってハンドガン3を移動させた距離、すなわち、発光体4の移動に合わせて移動させた軌跡の長さ(チューブ2の長さ)とタイマーの累積時間とから訓練者におけるハンドガンの移動速度が得られる。
【0061】
ここで、本発明においては、ハンドガン3のトリガ−33を引いた状態がハンドガン3の動作状態とされ、訓練者がハンドガン3の先端部を正面に向けた状態のときに、すなわち、ハンドガン3の筒状体52の軸線上に発光体4があるときに、発光体4からの光が受光されるように設定されていることから、受光器本体51が発光体4からの光を受光しているときは、ハンドガン3は発光体4の動きに同期しているものとみなすことができる。この場合、受光器本体51が発光体4からの光を受光していないときは、すなわち、ハンドガン3に、ハンドガン3の先端部が正面を向いていない場合(ハンドガン3の筒状体52の軸線上に発光体4がないとき)やハンドガン3が発光体4の移動速度と一致していないとき(ハンドガン3が発光体4の移動速度より遅いとき若しくは早いとき)に作動する報知手段、例えばリレーを用いた回路でパトライトをON−OFF(パトライトの点灯・点滅)させる手段を装備させておけば、ハンドガン3の移動が理想とする速度から逸脱しているものと判断することができる。これにより、訓練者は報知手段が作動しなければ(例えば、パトライトが点灯しなければ)ハンドガン3の先端部が正面に向けられた状態にあるものと判断して、ハンドガン3を理想とする速度で移動させることができる。なお、ハンドガン3の理想とする速度は、既定の速度と略同一の速度(450〜500mm/sec程度)とされている。ハンドガン3の速度は、人手作業による作業作度のムラ(1台の被塗物を塗装する場合、速度の上下が発生し、当該速度は1台ごとに相違している)を発生させないようにする観点から、450〜500mm/sec程度とされている。
【0062】
以上述べたように、本発明の塗装作業訓練装置1によれば、チューブ2内の発光体4の移動速度を既定の速度(450〜500mm/sec程度)と合致させ、訓練者が発光体4の移動速度に合わせてハンドガン3を移動させることで、ハンドガン3の移動速度を習得することができる。
【0063】
なお、これまで本発明について、図面に示した特定の実施の形態をもって本発明を説明しているが、本発明はこれらの実施の形態に限定されるものではなく、本発明の効果を奏する限り、これまで知られているいかなる構成であっても採用することができる。
【0064】
例えば、前述の実施例では、流体6として水を用いているが、流動性のある液体、例えば有機溶剤やアルコール等の揮発性の溶剤でもよい。但し、流体6として有機溶剤を使用する場合は防爆の処置を施す必要のない溶剤を選定することが好ましく、アセトンや酢酸エチル等の樹脂を溶かす液体、あるいは強酸、強アルカリ性の溶剤の場合は、発光部を構成するケースやチューブの材質に対する制約が多くなり、また、流体6としてアルコール等の揮発性の溶剤を使用する場合は、チューブの密閉度が低い場合は流体の容積変化を起したり、夏季に気化を起こし、破裂することがないように留意する必要がある。
【0065】
また、前述の実施例では、円筒体を使用しているが、例えば先端部から後端側に向かって縮径するラッパ状の筒や六角筒もしくは四角筒などを使用してもよい。
【0066】
さらに、前述の実施例では、ハンドガン3の先端部が正面を向いていない場合に、報知手段としてのパトライトを点灯させているが、ハンドガン3の先端部が正面を向いている場合に、報知手段としてのパトライトを点灯・点滅させてもよい。
【符号の説明】
【0067】
1・・・塗装作業訓練装置
2・・・チューブ
3・・・ハンドガン
4・・・発光体
42a・・・LED
5・・・受光器
51・・・受光器本体
52・・・筒状体
6・・・流体
7・・・ポンプ
8・・・バック
10a・・・第1のストレーナ
10b・・・第2のストレーナ
91・・・軌跡
【特許請求の範囲】
【請求項1】
所定の軌跡に沿って配置されるチューブと、前記チューブから離間した位置に配置されるハンドガンとを備え、
前記チューブ内には発光体が移動可能に収容され、
前記ハンドガンには前記発光体からの光を受光する受光器が配設されていることを特徴とする塗装作業訓練装置。
【請求項2】
前記チューブは、透明若しくは半透明のチューブから成ることを特徴とする請求項1記載の塗装作業訓練装置。
【請求項3】
前記チューブ内には流体が充填されていることを特徴とする請求項1または請求項2記載の塗装作業訓練装置。
【請求項4】
前記チューブの一端部には、前記流体を供給し、吸引するためのポンプが連結され、
前記チューブの他端部には、前記流体の供給と吸引に対応してスライド伸縮するバックが連結されていることを特徴とする請求項3記載の塗装作業訓練装置。
【請求項5】
前記チューブ内の前記ポンプ側および前記バック側にはそれぞれストレーナが配設されていることを特徴とする請求項4記載の塗装作業訓練装置。
【請求項6】
前記受光器は、前記発光体からの光を受光する受光器本体と、前記受光器本体の前部側に配置される筒状体とを備えることを特徴とする請求項1乃至請求項5の何れか1項記載の塗装作業訓練装置。
【請求項7】
前記ハンドガンは、前記発光体が前記筒状体の軸線上にあるとき、または前記軸線上にないときに作動する報知手段を備えていることを特徴とする請求項6記載の塗装作業訓練装置。
【請求項1】
所定の軌跡に沿って配置されるチューブと、前記チューブから離間した位置に配置されるハンドガンとを備え、
前記チューブ内には発光体が移動可能に収容され、
前記ハンドガンには前記発光体からの光を受光する受光器が配設されていることを特徴とする塗装作業訓練装置。
【請求項2】
前記チューブは、透明若しくは半透明のチューブから成ることを特徴とする請求項1記載の塗装作業訓練装置。
【請求項3】
前記チューブ内には流体が充填されていることを特徴とする請求項1または請求項2記載の塗装作業訓練装置。
【請求項4】
前記チューブの一端部には、前記流体を供給し、吸引するためのポンプが連結され、
前記チューブの他端部には、前記流体の供給と吸引に対応してスライド伸縮するバックが連結されていることを特徴とする請求項3記載の塗装作業訓練装置。
【請求項5】
前記チューブ内の前記ポンプ側および前記バック側にはそれぞれストレーナが配設されていることを特徴とする請求項4記載の塗装作業訓練装置。
【請求項6】
前記受光器は、前記発光体からの光を受光する受光器本体と、前記受光器本体の前部側に配置される筒状体とを備えることを特徴とする請求項1乃至請求項5の何れか1項記載の塗装作業訓練装置。
【請求項7】
前記ハンドガンは、前記発光体が前記筒状体の軸線上にあるとき、または前記軸線上にないときに作動する報知手段を備えていることを特徴とする請求項6記載の塗装作業訓練装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−78897(P2011−78897A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−232404(P2009−232404)
【出願日】平成21年10月6日(2009.10.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.パトライト
【出願人】(000157083)関東自動車工業株式会社 (1,164)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月6日(2009.10.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.パトライト
【出願人】(000157083)関東自動車工業株式会社 (1,164)
【Fターム(参考)】
[ Back to top ]