
塗装用ロボットシステムおよびスプレーガンユニット
【課題】スプレーガン同士の間隔を簡単に変更することが可能な塗装用ロボットシステムを提供する。
【解決手段】塗装用ロボットシステム10は、複数のロボットアーム22〜24を有するとともに、先端のロボットアーム24に、先端駆動軸J5を中心に回動する駆動軸部材25が設けられたロボット20と、ロボットアーム24に取り付けられたスプレーガンユニット30とを備えている。スプレーガンユニット30は、ロボットアーム24に固定された支持部材31と、支持部材31に設けられたガイド部材40a、40bと、支持部材31に設けられた複数のスプレーガン32、33a〜33cと、移動スプレーガン33a〜33cと駆動軸部材25とを連結するリンク機構50とを有している。ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔を変更可能である。
【解決手段】塗装用ロボットシステム10は、複数のロボットアーム22〜24を有するとともに、先端のロボットアーム24に、先端駆動軸J5を中心に回動する駆動軸部材25が設けられたロボット20と、ロボットアーム24に取り付けられたスプレーガンユニット30とを備えている。スプレーガンユニット30は、ロボットアーム24に固定された支持部材31と、支持部材31に設けられたガイド部材40a、40bと、支持部材31に設けられた複数のスプレーガン32、33a〜33cと、移動スプレーガン33a〜33cと駆動軸部材25とを連結するリンク機構50とを有している。ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔を変更可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、塗装用ロボットシステムおよびこのような塗装用ロボットシステムに用いられるスプレーガンユニットに関する。
【背景技術】
【0002】
従来、例えば小型携帯端末などの被塗装物を塗装する場合、被塗装物を回転式の治具に設置し、この被塗装物に対してロボットを用いて塗装を行っている。また、塗装効率を高めるため、ロボットアームに複数のスプレーガンを取り付けたものも存在する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−120148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の一般的な塗装システムにおいては、被塗装物同士の間隔(ピッチ)が一定に設定されている。このため、被塗装物同士の間隔が変更された場合、塗装作業を中断し、ロボットからスプレーガンユニットを取外すとともに、スプレーガンの間隔が異なる他のスプレーガンユニットに交換する必要がある。したがって、被塗装物同士の間隔を変更する場合には、スプレーガン同士の間隔が異なる複数のスプレーガンユニットを準備する必要がある。この場合、スプレーガンユニットの交換等、段取り替えの時間が多くかかってしまう。また、複数種類のスプレーガンユニットを準備する必要があるため、コストが増大するという問題もある。
【0005】
本発明はこのような点を考慮してなされたものであり、スプレーガン同士の間隔を簡単に変更することが可能な、塗装用ロボットシステムおよびスプレーガンユニットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、塗装用ロボットシステムにおいて、それぞれ駆動軸を中心に回動する複数のロボットアームを有するとともに、前記複数のロボットアームのうち先端のロボットアームに、先端駆動軸を中心に回動する駆動軸部材が設けられたロボットと、前記先端のロボットアームに取り付けられたスプレーガンユニットとを備え、前記スプレーガンユニットは、前記先端のロボットアームに固定された支持部材と、前記支持部材に設けられたガイド部材と、前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とする塗装用ロボットシステムである。
【0007】
本発明は、前記複数のスプレーガンは、前記支持部材に固定された固定スプレーガンを含むことを特徴とする塗装用ロボットシステムである。
【0008】
本発明は、前記固定スプレーガンは、前記先端駆動軸が存在する平面のうち前記ガイド部材に対して垂直な平面上に位置することを特徴とする塗装用ロボットシステムである。
【0009】
本発明は、前記リンク機構は、前記ロボットの前記駆動軸部材に連結された駆動リンクと、前記駆動リンクに回動自在に連結されるとともに前記移動スプレーガンに回動自在に連結された従動リンクとを有することを特徴とする塗装用ロボットシステムである。
【0010】
本発明は、前記支持部材は、前記駆動軸部材が貫通する貫通孔を有することを特徴とする塗装用ロボットシステムである。
【0011】
本発明は、前記移動スプレーガンは、前記固定スプレーガンの一側に配置された第1移動スプレーガンと、前記固定スプレーガンに対して前記第1移動スプレーガンの反対側に配置された第2移動スプレーガンとを含むことを特徴とする塗装用ロボットシステムである。
【0012】
本発明は、前記第1移動スプレーガンと前記固定スプレーガンとの間隔と、前記固定スプレーガンと前記第2移動スプレーガンとの間隔とが常に互いに等しいことを特徴とする塗装用ロボットシステムである。
【0013】
本発明は、塗装用ロボットシステムに用いられるスプレーガンユニットにおいて、前記先端のロボットアームに固定可能な支持部材と、前記支持部材に設けられたガイド部材と、前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とするスプレーガンユニットである。
【発明の効果】
【0014】
本発明によれば、ロボットの駆動軸部材が回動することにより、リンク機構を介して複数のスプレーガン同士の間隔を変更することができる。このことにより、被塗装物同士の間隔を変更する際の作業時間を短縮することができるとともに、被塗装物同士の間隔を変更する際のコストを抑えることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態による塗装用ロボットシステムを示す正面図。
【図2】本発明の一実施の形態による塗装用ロボットシステムを示す側面図。
【図3】本発明の一実施の形態による塗装用ロボットシステムを示す拡大断面図(図1のIII−III線断面図)。
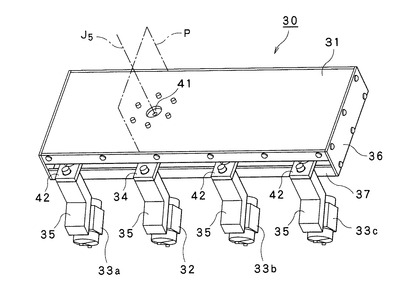
【図4】本発明の一実施の形態によるスプレーガンユニットを示す斜視図。
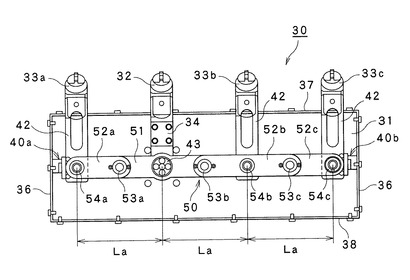
【図5】本発明の一実施の形態によるスプレーガンユニットを示す底面図。
【図6】本発明の一実施の形態によるスプレーガンユニットを示す平面図。
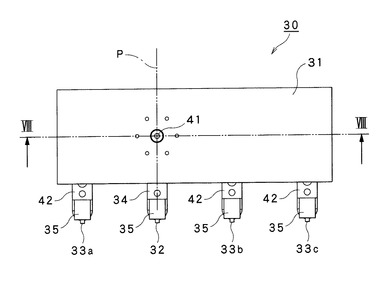
【図7】本発明の一実施の形態によるスプレーガンユニットを示す正面図。
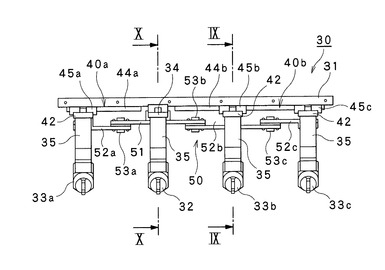
【図8】本発明の一実施の形態によるスプレーガンユニットを示す断面図(図6のVIII−VIII線断面図)。
【図9】本発明の一実施の形態によるスプレーガンユニットを示す断面図(図7のIX−IX線断面図)。
【図10】本発明の一実施の形態によるスプレーガンユニットを示す断面図(図7のX−X線断面図)。
【図11】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を縮めた状態を示す斜視図。
【図12】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を縮めた状態を示す底面図。
【図13】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を最小にした状態を示す斜視図。
【図14】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を最小にした状態を示す底面図。
【発明を実施するための形態】
【0016】
以下、本発明の一実施の形態について、図1乃至図14を参照して説明する。図1乃至図14は、本発明の一実施の形態を示す図である。
【0017】
まず、図1乃至図3により、本発明の一実施の形態による塗装用ロボットシステムの全体構成について説明する。図1乃至図3は、本発明の一実施の形態による塗装用ロボットシステムを示す図である。
【0018】
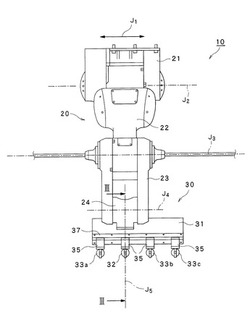
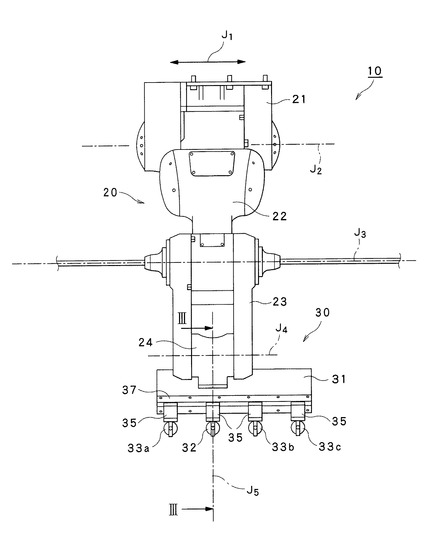
図1および図2に示すように、塗装用ロボットシステム10は、ベース部21と複数のロボットアーム22〜24とを有するロボット20と、ロボット20の先端のロボットアーム(第3ロボットアーム)24に取り付けられたスプレーガンユニット30とを備えている。
【0019】
このうちロボット20は、第1駆動軸J1に沿って水平移動可能なベース部21と、3本のロボットアーム(第1ロボットアーム22、第2ロボットアーム23、第3ロボットアーム24)とを有している。
【0020】
3本のロボットアームのうち第1ロボットアーム22は、第1駆動軸J1に対して平行な第2駆動軸J2を中心に、ベース部21に対して回動可能となっている。また、第2ロボットアーム23は、第2駆動軸J2に対して平行な第3駆動軸J3を中心に、第1ロボットアーム22に対して回動可能となっている。さらに、第3ロボットアーム24は、第3駆動軸J3に対して平行な第4駆動軸J4を中心に、第2ロボットアーム23に対して回動可能となっている。
【0021】
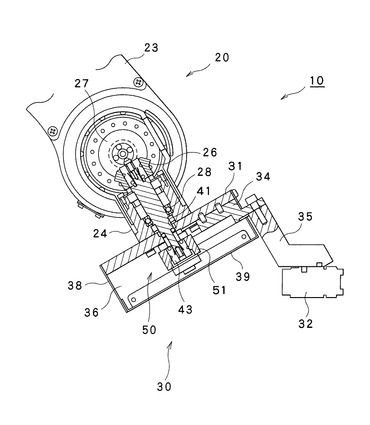
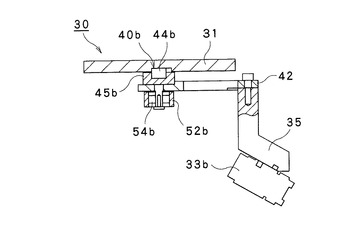
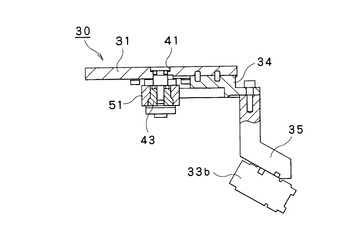
図3に示すように、第3ロボットアーム24には、第5駆動軸J5(先端駆動軸)を中心に第3ロボットアーム24に対して回動可能な駆動軸部材25が設けられている。第5駆動軸J5は第4駆動軸J4に対して垂直に位置している。この駆動軸部材25は、その先端が第3ロボットアーム24の先端から突出している。また、駆動軸部材25の先端部は、後述するスプレーガンユニット30のリンク機構50に取り付けられ、駆動軸部材25の基端部には、傘歯車26が固着されている。傘歯車26は、第2ロボットアーム23側の傘歯車27と係合しており、ロボット20の基端側に設けられた図示しないモータからの動力を駆動軸部材25に伝達する際、その回転方向を90度変換するようになっている。傘歯車26、27としては、直歯のものを用いても良く、曲り歯のものを用いても良い。なお、第3ロボットアーム24の内部には、駆動軸部材25の回転を支持する軸受28が設けられている。
【0022】
上述した構成のほか、ロボット20の構成は一般に用いられるロボット(例えば垂直多関節ロボット)と略同様であるので、詳細な説明は省略する。
【0023】
次に、本実施の形態によるスプレーガンユニットの構成について、図1乃至図10を参照して説明する。図4乃至図10は、本実施の形態によるスプレーガンユニットを示す図である。
【0024】
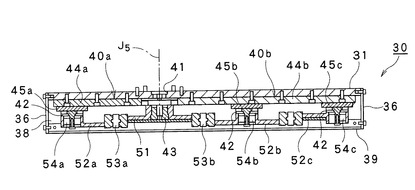
図1乃至図10に示すように、スプレーガンユニット30は、第3ロボットアーム24に固定される支持部材(ベースプレート)31と、支持部材31に設けられた2本のガイド部材40a、40bと、支持部材31に設けられた複数のスプレーガン32、33a〜33cとを有している。
【0025】
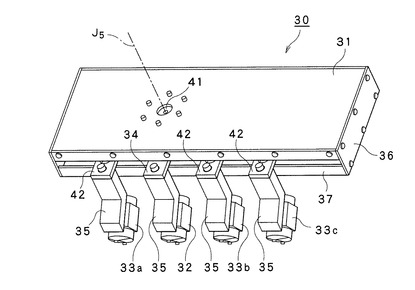
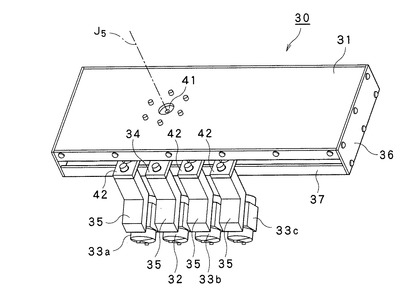
このうち支持部材31は、長方形の平板形状からなっている。また、支持部材31には、スプレーガンユニット30を第3ロボットアーム24に取り付けた際、駆動軸部材25が貫通する円形の貫通孔41が形成されている(図4および図6参照)。
【0026】
さらに、支持部材31には、それぞれ長方形状の側面板36、前面板37および背面板38が取り付けられ、側面板36、前面板37および背面板38には、長方形状の底面板39が取り付けられている。これら支持部材31、側面板36、前面板37、背面板38および底面板39により、略直方体状のケーシングが構成されている。なお、図5において、底面板39の表示を省略し(図12および図14においても同様)、図7、図9および図10において、側面板36、前面板37、背面板38および底面板39の表示を省略している。
【0027】
また、ガイド部材40a、40bは、それぞれ直動ガイドからなっており、ともに支持部材31の底面に連結固定されている。このうち一方のガイド部材40a(以下、第1ガイド部材40aともいう)は、レール44aと、レール44a上を水平移動するブロック45aとを有しており、相対的に短い直動ガイドからなっている。また、他方のガイド部材40b(以下、第2ガイド部材40bともいう)は、レール44bと、レール44b上を水平移動するブロック45b、45cとを有しており、相対的に長い直動ガイドからなっている。これら第1ガイド部材40aおよび第2ガイド部材40bは、同一直線上であって、互いに離間して配置されている。これにより、後述する締結部品43を第1ガイド部材40aおよび第2ガイド部材40bの間に配置させることができる。また、第5駆動軸J5は、レール44aおよびレール44bを結ぶ直線と交わっている。
【0028】
一方、複数のスプレーガン32、33a〜33cのうち、スプレーガン32(以下、固定スプレーガン32ともいう)は、固定ブラケット34およびガン取付部材35を介して、支持部材31に連結固定されている。すなわち固定スプレーガン32は、支持部材31に対して移動しないようになっている。なお、ガン取付部材35は断面く字形状を有しており(図10)、固定スプレーガン32による塗料の塗布方向が支持部材31の表面に対して傾斜するようになっている。
【0029】
この固定スプレーガン32は、正面側(図7参照)から見た場合、駆動軸部材25を回動させる第5駆動軸J5と同一の位置に配置されている。換言すれば、固定スプレーガン32は、第5駆動軸J5が存在する平面のうち、ガイド部材40a、40bに対して垂直な平面P(図4および図6参照)上に位置している。このような構成により、固定スプレーガン32を正面側から見て第5駆動軸J5の回転中心に固定配置させることができる。
【0030】
一方、スプレーガン33a〜33c(以下、第1移動スプレーガン33a、第2移動スプレーガン33b、第3移動スプレーガン33cともいう)は、それぞれ支持部材31に対して移動可能なスプレーガンからなっている。このうち第1移動スプレーガン33aは、細長いブラケット42を介して第1ガイド部材40aのブロック45aに取り付けられている。これにより、第1移動スプレーガン33aは、第1ガイド部材40aのレール44aに案内され、このレール44aに沿って水平に直線移動可能となっている。
【0031】
また、第2移動スプレーガン33bおよび第3移動スプレーガン33cは、それぞれ細長いブラケット42を介して第2ガイド部材40bのブロック45b、45cに取り付けられている。これら第2移動スプレーガン33bおよび第3移動スプレーガン33cは、それぞれ第2ガイド部材40bのレール44bに案内されて、このレール44bに沿って直線移動可能となっている。
【0032】
この場合、第1移動スプレーガン33aは、固定スプレーガン32に対して一側(図7の左側)に配置され、第2移動スプレーガン33bおよび第3移動スプレーガン33cは、それぞれ固定スプレーガン32に対して反対側(図7の右側)に配置されている。
【0033】
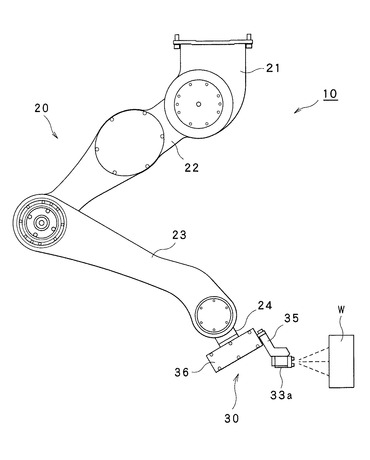
なお、固定スプレーガン32および移動スプレーガン33a〜33cには、図示しない少なくとも1つのホースが接続されており、これらのホースから塗料やエアを供給することにより、ワーク(被塗装物)W(図2参照)に対して塗料を吹き付けることができるようになっている。この固定スプレーガン32および移動スプレーガン33a〜33cは、従来一般に用いられる塗装ガンからなっていてもよい。本実施の形態において、固定スプレーガン32および移動スプレーガン33a〜33cは、互いに同一の構造からなっているが、必ずしもこれに限られるものではなく、互いに異なる構造を有していても良い。
【0034】
また、図3に示すように、駆動軸部材25は、締結部品43を介してリンク機構50に連結されている。このリンク機構50は、移動スプレーガン33a〜33cにも連結されており、ロボット20の駆動軸部材25が回動することにより、締結部品43およびリンク機構50を介して移動スプレーガン33a〜33cが移動するようになっている。
【0035】
すなわち、図5、図7および図8に示すように、リンク機構50は、駆動リンク51と、従動リンク52a〜52c(以下、第1従動リンク52a、第2従動リンク52b、第3従動リンク52cともいう)とから構成されている。このうち駆動リンク51は、その中央部において、締結部品43を介してロボット20の駆動軸部材25に連結されている。
【0036】
また、第1従動リンク52aは、その一端が軸部材53aを介して駆動リンク51に回動自在に連結されるとともに、他端が軸部材54aを介して第1移動スプレーガン33aに回動自在に連結されている。第2従動リンク52bは、その一端が軸部材53bを介して駆動リンク51に回動自在に連結されるとともに、中央部において軸部材54bを介して第2移動スプレーガン33bに回動自在に連結されている。第3従動リンク52cは、その一端が軸部材53cを介して第2従動リンク52bに回動自在に連結されるとともに、他端が軸部材54cを介して第3移動スプレーガン33cに回動自在に連結されている。
【0037】
なお、駆動リンク51と、従動リンク52a〜52cとは、いずれも細長い平板形状を有している。また、駆動リンク51および第2従動リンク52bは、互いに略同一の長さを有しており、第1従動リンク52aおよび第3従動リンク52cは、互いに略同一の長さを有している。さらに、駆動リンク51および第2従動リンク52bは、第1従動リンク52aおよび第3従動リンク52cの約2倍の長さを有している。
【0038】
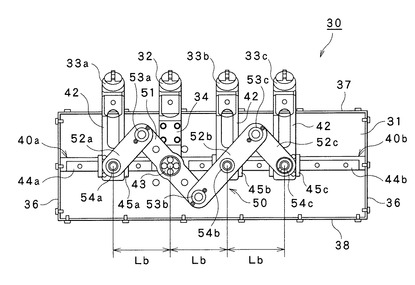
このようなリンク機構50が設けられていることにより、固定スプレーガン32および移動スプレーガン33a〜33c同士の間隔を変更できるようになっている。この場合、固定スプレーガン32および移動スプレーガン33a〜33cは、常に互いに同一の間隔(ピッチ)を空けるように配置される。すなわち、図5において、第1移動スプレーガン33aと固定スプレーガン32との間隔Laと、固定スプレーガン32と第2移動スプレーガン33bとの間隔Laと、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔Laとは、互いに同一である。さらに、リンク機構50により、移動スプレーガン33a〜33cがどのような位置に来た場合であっても、第1移動スプレーガン33aと固定スプレーガン32との間隔と、固定スプレーガン32と第2移動スプレーガン33bとの間隔と、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔とは、互いに同一となる(後述する図11乃至図14参照)。
【0039】
なお、図4乃至図10において、リンク機構50の駆動リンク51と従動リンク52a〜52cとが一直線状に配置されており、これら固定スプレーガン32および移動スプレーガン33a〜33cの同士間隔(La)は最大となっている。
【0040】
次に、このような構成からなる本実施の形態の作用について、図4乃至図14を用いて説明する。とりわけ、固定スプレーガン32および移動スプレーガン33a〜33cの間隔を変更する際の作用について説明する。
【0041】
初めに、塗装用ロボットシステム10が、互いに間隔(La)を空けて並ぶ複数のワークW(図2)に対して塗装作業を行う場合を想定する。この場合、固定スプレーガン32および移動スプレーガン33a〜33cの各間隔(La)は最大とされる(図4乃至図10参照)。この状態で、ロボット20を動作させ、固定スプレーガン32および移動スプレーガン33a〜33cを用いてワークWに対して塗装作業を行う。
【0042】
続いて、Laより狭い間隔Lbを空けて並ぶ複数のワークWに対して塗装作業を行う場合の作用について説明する。この場合、ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔が狭くなるように変更される。
【0043】
この際、まずロボット20の基端側に設けられた図示しないモータからの動力が、傘歯車27および傘歯車26を順次介して駆動軸部材25に伝達される。これにより駆動軸部材25は所定方向(図12の時計回り方向)に回動する。
【0044】
駆動軸部材25が回動することにより、締結部品43も駆動軸部材25と同一の方向(図12の時計回り方向)に回動し、これによりリンク機構50の駆動リンク51も締結部品43を中心に所定方向(図12の時計回り方向)に回動する。駆動リンク51が回動することにより、各従動リンク52a〜52cの角度が変化し、各従動リンク52a〜52cに連結された複数のスプレーガン32、33a〜33c同士の距離が変化する。
【0045】
すなわち、駆動リンク51に連動して、第1従動リンク52aが駆動リンク51と逆方向(図12の反時計回り方向)に回動する。これにより、第1移動スプレーガン33aがブラケット42および軸部材54aを介して第1ガイド部材40aによって案内され、固定スプレーガン32に接近する方向に水平移動される。
【0046】
同様に、駆動リンク51に連動して、第2従動リンク52bが駆動リンク51と逆方向(図12の反時計回り方向)に回動する。これにより、第2移動スプレーガン33bがブラケット42および軸部材54bを介して第2ガイド部材40bによって案内され、固定スプレーガン32に接近する方向に水平移動される。
【0047】
また、第2従動リンク52bに連動して、第3従動リンク52cが第2従動リンク52bと逆方向(図12の時計回り方向)に回動する。これにより、第3移動スプレーガン33cがブラケット42および軸部材54cを介して第2ガイド部材40bによって案内され、第2移動スプレーガン33bに接近する方向に水平移動される。一方、固定スプレーガン32は、支持部材31に対して常に固定されている。
【0048】
このようにして、固定スプレーガン32および移動スプレーガン33a〜33cは、それぞれ互いに同一の間隔Lb(<La)を空けて配置されるようになる(図11および図12)。すなわち図11および図12において、第1移動スプレーガン33aと固定スプレーガン32との間隔Lbと、固定スプレーガン32と第2移動スプレーガン33bとの間隔Lbと、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔Lbとは、互いに同一となっている。
【0049】
続いて、Lbよりさらに狭い間隔Lcを空けて並ぶ複数のワークWに対して塗装作業を行う場合の作用について説明する。
【0050】
この場合、ロボット20の駆動軸部材25が更に回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔が更に狭められる。
【0051】
すなわち、上記と同様にして、駆動軸部材25が更に回動することにより、締結部品43を介して、リンク機構50の駆動リンク51および従動リンク52a〜52cが回動し、移動スプレーガン33a〜33cがそれぞれ固定スプレーガン32に更に接近する方向に水平移動する。
【0052】
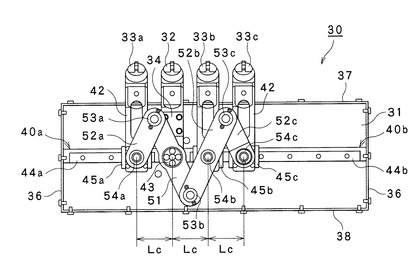
このようにして、固定スプレーガン32および移動スプレーガン33a〜33cは、それぞれ同一の間隔Lc(<Lb)を空けて配置されるようになる(図13および図14)。すなわち、図13および図14において、第1移動スプレーガン33aと固定スプレーガン32との間隔Lcと、固定スプレーガン32と第2移動スプレーガン33bとの間隔Lcと、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔Lcとは、互いに同一となっている。なお、図13および図14において、移動スプレーガン33a〜33cは、それぞれ固定スプレーガン32に対して最も接近した状態となっており、固定スプレーガン32および移動スプレーガン33a〜33cの間隔(Lc)は最小となっている。
【0053】
なお、上記と逆の作用を実行することにより、固定スプレーガン32および移動スプレーガン33a〜33cの間隔を広げることができる。すなわち、駆動軸部材25および締結部品43を上記方向と逆方向(すなわち図14の反時計回り方向)に回動させる。これにより、移動スプレーガン33a〜33cは、ガイド部材40a、40bに案内されて、それぞれ固定スプレーガン32に対して遠ざかる方向に移動する。
【0054】
以上説明したように、本実施の形態によれば、ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔を変更することができる。すなわち、各スプレーガン32、33a〜33c同士の間隔は、駆動軸部材25の回転量によって自在に変更される。これにより、1台のスプレーガンユニット30のみを用いて各スプレーガン32、33a〜33c同士の間隔を様々に変更することができる。このため、ワークW同士の間隔を変更する際、スプレーガンユニット30を交換する必要がなく、作業時間を短縮することができる。また、ワークW同士の間隔を変更する際、異なるスプレーガンユニット30を準備する必要がなく、スプレーガンユニット30のコストを抑えることができる。さらに、ロボット20側の駆動軸部材25を利用し、かつリンク機構50を用いているので、少ない構成要素により各スプレーガン32、33a〜33c同士の間隔を任意に変更することができる。
【0055】
また本実施の形態によれば、支持部材31に固定された固定スプレーガン32は、先端駆動軸J5が存在する平面のうちガイド部材40a、40bに対して垂直な平面P上に位置するので、支持部材31に対する固定スプレーガン32の位置を一定に保持しつつ、各移動スプレーガン33a〜33cをガイド部材40a、40bに沿って移動し、その相対位置を自在に変更することができる。
【0056】
また本実施の形態によれば、リンク機構50は、駆動軸部材25に連結された駆動リンク51と、駆動リンク51に回動自在に連結されるとともに移動スプレーガン33a、33bに回動自在に連結された従動リンク52a、52bとを有するので、簡単な構成で各スプレーガン32、33a〜33c同士の間隔を変更することができる。
【0057】
さらに本実施の形態によれば、支持部材31は、駆動軸部材25が貫通する貫通孔41を有するので、支持部材31を第3ロボットアーム24に取り付けた際、駆動軸部材25を確実にリンク機構50に連結することができる。
【0058】
さらに本実施の形態によれば、移動スプレーガン33a〜33cは、固定スプレーガン32の一側に配置された第1移動スプレーガン33aと、固定スプレーガン32に対して第1移動スプレーガン33aの反対側に配置された第2移動スプレーガン33bとを含むので、固定スプレーガン32を中心に、第1移動スプレーガン33aと第2移動スプレーガン33bとを移動させ、これらの間隔を自在に変更することができる。
【0059】
さらに本実施の形態によれば、第1移動スプレーガン33aと固定スプレーガン32との間隔と、固定スプレーガン32と第2移動スプレーガン33bとの間隔と、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔とが常に互いに等しいので、等間隔で並ぶワークWの間隔を様々に変更した場合であっても、容易に対応することができる。
【0060】
なお、上記実施の形態では、1つの固定スプレーガン32と、3つの移動スプレーガン33a〜33cとを用いているが、これに限られるものではない。例えば、固定スプレーガンを設けず、全てを移動スプレーガンとしても良い。あるいは、2つ以上の固定スプレーガンを設けても良い。また、移動スプレーガンの数は3つに限らず、1つ、2つまたは4つ以上であっても良い。
【0061】
さらに、上記実施の形態では、第1移動スプレーガン33aは、固定スプレーガン32に対して一方の側に設けられ、第2移動スプレーガン33bおよび第3移動スプレーガン33cは、固定スプレーガン32に対して他方の側に設けられているが、これに限られるものではない。例えば複数の移動スプレーガン33a〜33c全てを固定スプレーガン32に対して同一の側に設けても良い。
【符号の説明】
【0062】
10 塗装用ロボットシステム
20 ロボット
21 ベース部
22 第1ロボットアーム
23 第2ロボットアーム
24 第3ロボットアーム
25 駆動軸部材
30 スプレーガンユニット
31 支持部材
32 固定スプレーガン
33a 第1移動スプレーガン
33b 第2移動スプレーガン
33c 第3移動スプレーガン
40a 第1ガイド部材
40b 第2ガイド部材
41 貫通孔
43 締結部品
50 リンク機構
51 駆動リンク
52a 第1従動リンク
52b 第2従動リンク
52c 第3従動リンク
【技術分野】
【0001】
本発明は、塗装用ロボットシステムおよびこのような塗装用ロボットシステムに用いられるスプレーガンユニットに関する。
【背景技術】
【0002】
従来、例えば小型携帯端末などの被塗装物を塗装する場合、被塗装物を回転式の治具に設置し、この被塗装物に対してロボットを用いて塗装を行っている。また、塗装効率を高めるため、ロボットアームに複数のスプレーガンを取り付けたものも存在する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−120148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の一般的な塗装システムにおいては、被塗装物同士の間隔(ピッチ)が一定に設定されている。このため、被塗装物同士の間隔が変更された場合、塗装作業を中断し、ロボットからスプレーガンユニットを取外すとともに、スプレーガンの間隔が異なる他のスプレーガンユニットに交換する必要がある。したがって、被塗装物同士の間隔を変更する場合には、スプレーガン同士の間隔が異なる複数のスプレーガンユニットを準備する必要がある。この場合、スプレーガンユニットの交換等、段取り替えの時間が多くかかってしまう。また、複数種類のスプレーガンユニットを準備する必要があるため、コストが増大するという問題もある。
【0005】
本発明はこのような点を考慮してなされたものであり、スプレーガン同士の間隔を簡単に変更することが可能な、塗装用ロボットシステムおよびスプレーガンユニットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、塗装用ロボットシステムにおいて、それぞれ駆動軸を中心に回動する複数のロボットアームを有するとともに、前記複数のロボットアームのうち先端のロボットアームに、先端駆動軸を中心に回動する駆動軸部材が設けられたロボットと、前記先端のロボットアームに取り付けられたスプレーガンユニットとを備え、前記スプレーガンユニットは、前記先端のロボットアームに固定された支持部材と、前記支持部材に設けられたガイド部材と、前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とする塗装用ロボットシステムである。
【0007】
本発明は、前記複数のスプレーガンは、前記支持部材に固定された固定スプレーガンを含むことを特徴とする塗装用ロボットシステムである。
【0008】
本発明は、前記固定スプレーガンは、前記先端駆動軸が存在する平面のうち前記ガイド部材に対して垂直な平面上に位置することを特徴とする塗装用ロボットシステムである。
【0009】
本発明は、前記リンク機構は、前記ロボットの前記駆動軸部材に連結された駆動リンクと、前記駆動リンクに回動自在に連結されるとともに前記移動スプレーガンに回動自在に連結された従動リンクとを有することを特徴とする塗装用ロボットシステムである。
【0010】
本発明は、前記支持部材は、前記駆動軸部材が貫通する貫通孔を有することを特徴とする塗装用ロボットシステムである。
【0011】
本発明は、前記移動スプレーガンは、前記固定スプレーガンの一側に配置された第1移動スプレーガンと、前記固定スプレーガンに対して前記第1移動スプレーガンの反対側に配置された第2移動スプレーガンとを含むことを特徴とする塗装用ロボットシステムである。
【0012】
本発明は、前記第1移動スプレーガンと前記固定スプレーガンとの間隔と、前記固定スプレーガンと前記第2移動スプレーガンとの間隔とが常に互いに等しいことを特徴とする塗装用ロボットシステムである。
【0013】
本発明は、塗装用ロボットシステムに用いられるスプレーガンユニットにおいて、前記先端のロボットアームに固定可能な支持部材と、前記支持部材に設けられたガイド部材と、前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とするスプレーガンユニットである。
【発明の効果】
【0014】
本発明によれば、ロボットの駆動軸部材が回動することにより、リンク機構を介して複数のスプレーガン同士の間隔を変更することができる。このことにより、被塗装物同士の間隔を変更する際の作業時間を短縮することができるとともに、被塗装物同士の間隔を変更する際のコストを抑えることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態による塗装用ロボットシステムを示す正面図。
【図2】本発明の一実施の形態による塗装用ロボットシステムを示す側面図。
【図3】本発明の一実施の形態による塗装用ロボットシステムを示す拡大断面図(図1のIII−III線断面図)。
【図4】本発明の一実施の形態によるスプレーガンユニットを示す斜視図。
【図5】本発明の一実施の形態によるスプレーガンユニットを示す底面図。
【図6】本発明の一実施の形態によるスプレーガンユニットを示す平面図。
【図7】本発明の一実施の形態によるスプレーガンユニットを示す正面図。
【図8】本発明の一実施の形態によるスプレーガンユニットを示す断面図(図6のVIII−VIII線断面図)。
【図9】本発明の一実施の形態によるスプレーガンユニットを示す断面図(図7のIX−IX線断面図)。
【図10】本発明の一実施の形態によるスプレーガンユニットを示す断面図(図7のX−X線断面図)。
【図11】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を縮めた状態を示す斜視図。
【図12】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を縮めた状態を示す底面図。
【図13】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を最小にした状態を示す斜視図。
【図14】本発明の一実施の形態によるスプレーガンユニットにおいて、スプレーガン同士の間隔を最小にした状態を示す底面図。
【発明を実施するための形態】
【0016】
以下、本発明の一実施の形態について、図1乃至図14を参照して説明する。図1乃至図14は、本発明の一実施の形態を示す図である。
【0017】
まず、図1乃至図3により、本発明の一実施の形態による塗装用ロボットシステムの全体構成について説明する。図1乃至図3は、本発明の一実施の形態による塗装用ロボットシステムを示す図である。
【0018】
図1および図2に示すように、塗装用ロボットシステム10は、ベース部21と複数のロボットアーム22〜24とを有するロボット20と、ロボット20の先端のロボットアーム(第3ロボットアーム)24に取り付けられたスプレーガンユニット30とを備えている。
【0019】
このうちロボット20は、第1駆動軸J1に沿って水平移動可能なベース部21と、3本のロボットアーム(第1ロボットアーム22、第2ロボットアーム23、第3ロボットアーム24)とを有している。
【0020】
3本のロボットアームのうち第1ロボットアーム22は、第1駆動軸J1に対して平行な第2駆動軸J2を中心に、ベース部21に対して回動可能となっている。また、第2ロボットアーム23は、第2駆動軸J2に対して平行な第3駆動軸J3を中心に、第1ロボットアーム22に対して回動可能となっている。さらに、第3ロボットアーム24は、第3駆動軸J3に対して平行な第4駆動軸J4を中心に、第2ロボットアーム23に対して回動可能となっている。
【0021】
図3に示すように、第3ロボットアーム24には、第5駆動軸J5(先端駆動軸)を中心に第3ロボットアーム24に対して回動可能な駆動軸部材25が設けられている。第5駆動軸J5は第4駆動軸J4に対して垂直に位置している。この駆動軸部材25は、その先端が第3ロボットアーム24の先端から突出している。また、駆動軸部材25の先端部は、後述するスプレーガンユニット30のリンク機構50に取り付けられ、駆動軸部材25の基端部には、傘歯車26が固着されている。傘歯車26は、第2ロボットアーム23側の傘歯車27と係合しており、ロボット20の基端側に設けられた図示しないモータからの動力を駆動軸部材25に伝達する際、その回転方向を90度変換するようになっている。傘歯車26、27としては、直歯のものを用いても良く、曲り歯のものを用いても良い。なお、第3ロボットアーム24の内部には、駆動軸部材25の回転を支持する軸受28が設けられている。
【0022】
上述した構成のほか、ロボット20の構成は一般に用いられるロボット(例えば垂直多関節ロボット)と略同様であるので、詳細な説明は省略する。
【0023】
次に、本実施の形態によるスプレーガンユニットの構成について、図1乃至図10を参照して説明する。図4乃至図10は、本実施の形態によるスプレーガンユニットを示す図である。
【0024】
図1乃至図10に示すように、スプレーガンユニット30は、第3ロボットアーム24に固定される支持部材(ベースプレート)31と、支持部材31に設けられた2本のガイド部材40a、40bと、支持部材31に設けられた複数のスプレーガン32、33a〜33cとを有している。
【0025】
このうち支持部材31は、長方形の平板形状からなっている。また、支持部材31には、スプレーガンユニット30を第3ロボットアーム24に取り付けた際、駆動軸部材25が貫通する円形の貫通孔41が形成されている(図4および図6参照)。
【0026】
さらに、支持部材31には、それぞれ長方形状の側面板36、前面板37および背面板38が取り付けられ、側面板36、前面板37および背面板38には、長方形状の底面板39が取り付けられている。これら支持部材31、側面板36、前面板37、背面板38および底面板39により、略直方体状のケーシングが構成されている。なお、図5において、底面板39の表示を省略し(図12および図14においても同様)、図7、図9および図10において、側面板36、前面板37、背面板38および底面板39の表示を省略している。
【0027】
また、ガイド部材40a、40bは、それぞれ直動ガイドからなっており、ともに支持部材31の底面に連結固定されている。このうち一方のガイド部材40a(以下、第1ガイド部材40aともいう)は、レール44aと、レール44a上を水平移動するブロック45aとを有しており、相対的に短い直動ガイドからなっている。また、他方のガイド部材40b(以下、第2ガイド部材40bともいう)は、レール44bと、レール44b上を水平移動するブロック45b、45cとを有しており、相対的に長い直動ガイドからなっている。これら第1ガイド部材40aおよび第2ガイド部材40bは、同一直線上であって、互いに離間して配置されている。これにより、後述する締結部品43を第1ガイド部材40aおよび第2ガイド部材40bの間に配置させることができる。また、第5駆動軸J5は、レール44aおよびレール44bを結ぶ直線と交わっている。
【0028】
一方、複数のスプレーガン32、33a〜33cのうち、スプレーガン32(以下、固定スプレーガン32ともいう)は、固定ブラケット34およびガン取付部材35を介して、支持部材31に連結固定されている。すなわち固定スプレーガン32は、支持部材31に対して移動しないようになっている。なお、ガン取付部材35は断面く字形状を有しており(図10)、固定スプレーガン32による塗料の塗布方向が支持部材31の表面に対して傾斜するようになっている。
【0029】
この固定スプレーガン32は、正面側(図7参照)から見た場合、駆動軸部材25を回動させる第5駆動軸J5と同一の位置に配置されている。換言すれば、固定スプレーガン32は、第5駆動軸J5が存在する平面のうち、ガイド部材40a、40bに対して垂直な平面P(図4および図6参照)上に位置している。このような構成により、固定スプレーガン32を正面側から見て第5駆動軸J5の回転中心に固定配置させることができる。
【0030】
一方、スプレーガン33a〜33c(以下、第1移動スプレーガン33a、第2移動スプレーガン33b、第3移動スプレーガン33cともいう)は、それぞれ支持部材31に対して移動可能なスプレーガンからなっている。このうち第1移動スプレーガン33aは、細長いブラケット42を介して第1ガイド部材40aのブロック45aに取り付けられている。これにより、第1移動スプレーガン33aは、第1ガイド部材40aのレール44aに案内され、このレール44aに沿って水平に直線移動可能となっている。
【0031】
また、第2移動スプレーガン33bおよび第3移動スプレーガン33cは、それぞれ細長いブラケット42を介して第2ガイド部材40bのブロック45b、45cに取り付けられている。これら第2移動スプレーガン33bおよび第3移動スプレーガン33cは、それぞれ第2ガイド部材40bのレール44bに案内されて、このレール44bに沿って直線移動可能となっている。
【0032】
この場合、第1移動スプレーガン33aは、固定スプレーガン32に対して一側(図7の左側)に配置され、第2移動スプレーガン33bおよび第3移動スプレーガン33cは、それぞれ固定スプレーガン32に対して反対側(図7の右側)に配置されている。
【0033】
なお、固定スプレーガン32および移動スプレーガン33a〜33cには、図示しない少なくとも1つのホースが接続されており、これらのホースから塗料やエアを供給することにより、ワーク(被塗装物)W(図2参照)に対して塗料を吹き付けることができるようになっている。この固定スプレーガン32および移動スプレーガン33a〜33cは、従来一般に用いられる塗装ガンからなっていてもよい。本実施の形態において、固定スプレーガン32および移動スプレーガン33a〜33cは、互いに同一の構造からなっているが、必ずしもこれに限られるものではなく、互いに異なる構造を有していても良い。
【0034】
また、図3に示すように、駆動軸部材25は、締結部品43を介してリンク機構50に連結されている。このリンク機構50は、移動スプレーガン33a〜33cにも連結されており、ロボット20の駆動軸部材25が回動することにより、締結部品43およびリンク機構50を介して移動スプレーガン33a〜33cが移動するようになっている。
【0035】
すなわち、図5、図7および図8に示すように、リンク機構50は、駆動リンク51と、従動リンク52a〜52c(以下、第1従動リンク52a、第2従動リンク52b、第3従動リンク52cともいう)とから構成されている。このうち駆動リンク51は、その中央部において、締結部品43を介してロボット20の駆動軸部材25に連結されている。
【0036】
また、第1従動リンク52aは、その一端が軸部材53aを介して駆動リンク51に回動自在に連結されるとともに、他端が軸部材54aを介して第1移動スプレーガン33aに回動自在に連結されている。第2従動リンク52bは、その一端が軸部材53bを介して駆動リンク51に回動自在に連結されるとともに、中央部において軸部材54bを介して第2移動スプレーガン33bに回動自在に連結されている。第3従動リンク52cは、その一端が軸部材53cを介して第2従動リンク52bに回動自在に連結されるとともに、他端が軸部材54cを介して第3移動スプレーガン33cに回動自在に連結されている。
【0037】
なお、駆動リンク51と、従動リンク52a〜52cとは、いずれも細長い平板形状を有している。また、駆動リンク51および第2従動リンク52bは、互いに略同一の長さを有しており、第1従動リンク52aおよび第3従動リンク52cは、互いに略同一の長さを有している。さらに、駆動リンク51および第2従動リンク52bは、第1従動リンク52aおよび第3従動リンク52cの約2倍の長さを有している。
【0038】
このようなリンク機構50が設けられていることにより、固定スプレーガン32および移動スプレーガン33a〜33c同士の間隔を変更できるようになっている。この場合、固定スプレーガン32および移動スプレーガン33a〜33cは、常に互いに同一の間隔(ピッチ)を空けるように配置される。すなわち、図5において、第1移動スプレーガン33aと固定スプレーガン32との間隔Laと、固定スプレーガン32と第2移動スプレーガン33bとの間隔Laと、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔Laとは、互いに同一である。さらに、リンク機構50により、移動スプレーガン33a〜33cがどのような位置に来た場合であっても、第1移動スプレーガン33aと固定スプレーガン32との間隔と、固定スプレーガン32と第2移動スプレーガン33bとの間隔と、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔とは、互いに同一となる(後述する図11乃至図14参照)。
【0039】
なお、図4乃至図10において、リンク機構50の駆動リンク51と従動リンク52a〜52cとが一直線状に配置されており、これら固定スプレーガン32および移動スプレーガン33a〜33cの同士間隔(La)は最大となっている。
【0040】
次に、このような構成からなる本実施の形態の作用について、図4乃至図14を用いて説明する。とりわけ、固定スプレーガン32および移動スプレーガン33a〜33cの間隔を変更する際の作用について説明する。
【0041】
初めに、塗装用ロボットシステム10が、互いに間隔(La)を空けて並ぶ複数のワークW(図2)に対して塗装作業を行う場合を想定する。この場合、固定スプレーガン32および移動スプレーガン33a〜33cの各間隔(La)は最大とされる(図4乃至図10参照)。この状態で、ロボット20を動作させ、固定スプレーガン32および移動スプレーガン33a〜33cを用いてワークWに対して塗装作業を行う。
【0042】
続いて、Laより狭い間隔Lbを空けて並ぶ複数のワークWに対して塗装作業を行う場合の作用について説明する。この場合、ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔が狭くなるように変更される。
【0043】
この際、まずロボット20の基端側に設けられた図示しないモータからの動力が、傘歯車27および傘歯車26を順次介して駆動軸部材25に伝達される。これにより駆動軸部材25は所定方向(図12の時計回り方向)に回動する。
【0044】
駆動軸部材25が回動することにより、締結部品43も駆動軸部材25と同一の方向(図12の時計回り方向)に回動し、これによりリンク機構50の駆動リンク51も締結部品43を中心に所定方向(図12の時計回り方向)に回動する。駆動リンク51が回動することにより、各従動リンク52a〜52cの角度が変化し、各従動リンク52a〜52cに連結された複数のスプレーガン32、33a〜33c同士の距離が変化する。
【0045】
すなわち、駆動リンク51に連動して、第1従動リンク52aが駆動リンク51と逆方向(図12の反時計回り方向)に回動する。これにより、第1移動スプレーガン33aがブラケット42および軸部材54aを介して第1ガイド部材40aによって案内され、固定スプレーガン32に接近する方向に水平移動される。
【0046】
同様に、駆動リンク51に連動して、第2従動リンク52bが駆動リンク51と逆方向(図12の反時計回り方向)に回動する。これにより、第2移動スプレーガン33bがブラケット42および軸部材54bを介して第2ガイド部材40bによって案内され、固定スプレーガン32に接近する方向に水平移動される。
【0047】
また、第2従動リンク52bに連動して、第3従動リンク52cが第2従動リンク52bと逆方向(図12の時計回り方向)に回動する。これにより、第3移動スプレーガン33cがブラケット42および軸部材54cを介して第2ガイド部材40bによって案内され、第2移動スプレーガン33bに接近する方向に水平移動される。一方、固定スプレーガン32は、支持部材31に対して常に固定されている。
【0048】
このようにして、固定スプレーガン32および移動スプレーガン33a〜33cは、それぞれ互いに同一の間隔Lb(<La)を空けて配置されるようになる(図11および図12)。すなわち図11および図12において、第1移動スプレーガン33aと固定スプレーガン32との間隔Lbと、固定スプレーガン32と第2移動スプレーガン33bとの間隔Lbと、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔Lbとは、互いに同一となっている。
【0049】
続いて、Lbよりさらに狭い間隔Lcを空けて並ぶ複数のワークWに対して塗装作業を行う場合の作用について説明する。
【0050】
この場合、ロボット20の駆動軸部材25が更に回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔が更に狭められる。
【0051】
すなわち、上記と同様にして、駆動軸部材25が更に回動することにより、締結部品43を介して、リンク機構50の駆動リンク51および従動リンク52a〜52cが回動し、移動スプレーガン33a〜33cがそれぞれ固定スプレーガン32に更に接近する方向に水平移動する。
【0052】
このようにして、固定スプレーガン32および移動スプレーガン33a〜33cは、それぞれ同一の間隔Lc(<Lb)を空けて配置されるようになる(図13および図14)。すなわち、図13および図14において、第1移動スプレーガン33aと固定スプレーガン32との間隔Lcと、固定スプレーガン32と第2移動スプレーガン33bとの間隔Lcと、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔Lcとは、互いに同一となっている。なお、図13および図14において、移動スプレーガン33a〜33cは、それぞれ固定スプレーガン32に対して最も接近した状態となっており、固定スプレーガン32および移動スプレーガン33a〜33cの間隔(Lc)は最小となっている。
【0053】
なお、上記と逆の作用を実行することにより、固定スプレーガン32および移動スプレーガン33a〜33cの間隔を広げることができる。すなわち、駆動軸部材25および締結部品43を上記方向と逆方向(すなわち図14の反時計回り方向)に回動させる。これにより、移動スプレーガン33a〜33cは、ガイド部材40a、40bに案内されて、それぞれ固定スプレーガン32に対して遠ざかる方向に移動する。
【0054】
以上説明したように、本実施の形態によれば、ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔を変更することができる。すなわち、各スプレーガン32、33a〜33c同士の間隔は、駆動軸部材25の回転量によって自在に変更される。これにより、1台のスプレーガンユニット30のみを用いて各スプレーガン32、33a〜33c同士の間隔を様々に変更することができる。このため、ワークW同士の間隔を変更する際、スプレーガンユニット30を交換する必要がなく、作業時間を短縮することができる。また、ワークW同士の間隔を変更する際、異なるスプレーガンユニット30を準備する必要がなく、スプレーガンユニット30のコストを抑えることができる。さらに、ロボット20側の駆動軸部材25を利用し、かつリンク機構50を用いているので、少ない構成要素により各スプレーガン32、33a〜33c同士の間隔を任意に変更することができる。
【0055】
また本実施の形態によれば、支持部材31に固定された固定スプレーガン32は、先端駆動軸J5が存在する平面のうちガイド部材40a、40bに対して垂直な平面P上に位置するので、支持部材31に対する固定スプレーガン32の位置を一定に保持しつつ、各移動スプレーガン33a〜33cをガイド部材40a、40bに沿って移動し、その相対位置を自在に変更することができる。
【0056】
また本実施の形態によれば、リンク機構50は、駆動軸部材25に連結された駆動リンク51と、駆動リンク51に回動自在に連結されるとともに移動スプレーガン33a、33bに回動自在に連結された従動リンク52a、52bとを有するので、簡単な構成で各スプレーガン32、33a〜33c同士の間隔を変更することができる。
【0057】
さらに本実施の形態によれば、支持部材31は、駆動軸部材25が貫通する貫通孔41を有するので、支持部材31を第3ロボットアーム24に取り付けた際、駆動軸部材25を確実にリンク機構50に連結することができる。
【0058】
さらに本実施の形態によれば、移動スプレーガン33a〜33cは、固定スプレーガン32の一側に配置された第1移動スプレーガン33aと、固定スプレーガン32に対して第1移動スプレーガン33aの反対側に配置された第2移動スプレーガン33bとを含むので、固定スプレーガン32を中心に、第1移動スプレーガン33aと第2移動スプレーガン33bとを移動させ、これらの間隔を自在に変更することができる。
【0059】
さらに本実施の形態によれば、第1移動スプレーガン33aと固定スプレーガン32との間隔と、固定スプレーガン32と第2移動スプレーガン33bとの間隔と、第2移動スプレーガン33bと第3移動スプレーガン33cとの間隔とが常に互いに等しいので、等間隔で並ぶワークWの間隔を様々に変更した場合であっても、容易に対応することができる。
【0060】
なお、上記実施の形態では、1つの固定スプレーガン32と、3つの移動スプレーガン33a〜33cとを用いているが、これに限られるものではない。例えば、固定スプレーガンを設けず、全てを移動スプレーガンとしても良い。あるいは、2つ以上の固定スプレーガンを設けても良い。また、移動スプレーガンの数は3つに限らず、1つ、2つまたは4つ以上であっても良い。
【0061】
さらに、上記実施の形態では、第1移動スプレーガン33aは、固定スプレーガン32に対して一方の側に設けられ、第2移動スプレーガン33bおよび第3移動スプレーガン33cは、固定スプレーガン32に対して他方の側に設けられているが、これに限られるものではない。例えば複数の移動スプレーガン33a〜33c全てを固定スプレーガン32に対して同一の側に設けても良い。
【符号の説明】
【0062】
10 塗装用ロボットシステム
20 ロボット
21 ベース部
22 第1ロボットアーム
23 第2ロボットアーム
24 第3ロボットアーム
25 駆動軸部材
30 スプレーガンユニット
31 支持部材
32 固定スプレーガン
33a 第1移動スプレーガン
33b 第2移動スプレーガン
33c 第3移動スプレーガン
40a 第1ガイド部材
40b 第2ガイド部材
41 貫通孔
43 締結部品
50 リンク機構
51 駆動リンク
52a 第1従動リンク
52b 第2従動リンク
52c 第3従動リンク
【特許請求の範囲】
【請求項1】
塗装用ロボットシステムにおいて、
それぞれ駆動軸を中心に回動する複数のロボットアームを有するとともに、前記複数のロボットアームのうち先端のロボットアームに、先端駆動軸を中心に回動する駆動軸部材が設けられたロボットと、
前記先端のロボットアームに取り付けられたスプレーガンユニットとを備え、
前記スプレーガンユニットは、
前記先端のロボットアームに固定された支持部材と、
前記支持部材に設けられたガイド部材と、
前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、
前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、
前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とする塗装用ロボットシステム。
【請求項2】
前記複数のスプレーガンは、前記支持部材に固定された固定スプレーガンを含むことを特徴とする請求項1記載の塗装用ロボットシステム。
【請求項3】
前記固定スプレーガンは、前記先端駆動軸が存在する平面のうち前記ガイド部材に対して垂直な平面上に位置することを特徴とする請求項2記載の塗装用ロボットシステム。
【請求項4】
前記リンク機構は、前記ロボットの前記駆動軸部材に連結された駆動リンクと、前記駆動リンクに回動自在に連結されるとともに前記移動スプレーガンに回動自在に連結された従動リンクとを有することを特徴とする請求項1乃至3のいずれか一項記載の塗装用ロボットシステム。
【請求項5】
前記支持部材は、前記駆動軸部材が貫通する貫通孔を有することを特徴とする請求項1乃至4のいずれか一項記載の塗装用ロボットシステム。
【請求項6】
前記移動スプレーガンは、前記固定スプレーガンの一側に配置された第1移動スプレーガンと、前記固定スプレーガンに対して前記第1移動スプレーガンの反対側に配置された第2移動スプレーガンとを含むことを特徴とする請求項2または3記載の塗装用ロボットシステム。
【請求項7】
前記第1移動スプレーガンと前記固定スプレーガンとの間隔と、前記固定スプレーガンと前記第2移動スプレーガンとの間隔とが常に互いに等しいことを特徴とする請求項6記載の塗装用ロボットシステム。
【請求項8】
請求項1記載の塗装用ロボットシステムに用いられるスプレーガンユニットにおいて、
前記先端のロボットアームに固定可能な支持部材と、
前記支持部材に設けられたガイド部材と、
前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、
前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、
前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とするスプレーガンユニット。
【請求項1】
塗装用ロボットシステムにおいて、
それぞれ駆動軸を中心に回動する複数のロボットアームを有するとともに、前記複数のロボットアームのうち先端のロボットアームに、先端駆動軸を中心に回動する駆動軸部材が設けられたロボットと、
前記先端のロボットアームに取り付けられたスプレーガンユニットとを備え、
前記スプレーガンユニットは、
前記先端のロボットアームに固定された支持部材と、
前記支持部材に設けられたガイド部材と、
前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、
前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、
前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とする塗装用ロボットシステム。
【請求項2】
前記複数のスプレーガンは、前記支持部材に固定された固定スプレーガンを含むことを特徴とする請求項1記載の塗装用ロボットシステム。
【請求項3】
前記固定スプレーガンは、前記先端駆動軸が存在する平面のうち前記ガイド部材に対して垂直な平面上に位置することを特徴とする請求項2記載の塗装用ロボットシステム。
【請求項4】
前記リンク機構は、前記ロボットの前記駆動軸部材に連結された駆動リンクと、前記駆動リンクに回動自在に連結されるとともに前記移動スプレーガンに回動自在に連結された従動リンクとを有することを特徴とする請求項1乃至3のいずれか一項記載の塗装用ロボットシステム。
【請求項5】
前記支持部材は、前記駆動軸部材が貫通する貫通孔を有することを特徴とする請求項1乃至4のいずれか一項記載の塗装用ロボットシステム。
【請求項6】
前記移動スプレーガンは、前記固定スプレーガンの一側に配置された第1移動スプレーガンと、前記固定スプレーガンに対して前記第1移動スプレーガンの反対側に配置された第2移動スプレーガンとを含むことを特徴とする請求項2または3記載の塗装用ロボットシステム。
【請求項7】
前記第1移動スプレーガンと前記固定スプレーガンとの間隔と、前記固定スプレーガンと前記第2移動スプレーガンとの間隔とが常に互いに等しいことを特徴とする請求項6記載の塗装用ロボットシステム。
【請求項8】
請求項1記載の塗装用ロボットシステムに用いられるスプレーガンユニットにおいて、
前記先端のロボットアームに固定可能な支持部材と、
前記支持部材に設けられたガイド部材と、
前記支持部材に設けられた複数のスプレーガンであって、このうち少なくとも1つのスプレーガンが前記ガイド部材に沿って移動可能な移動スプレーガンからなる、複数のスプレーガンと、
前記移動スプレーガンと前記駆動軸部材とを連結するリンク機構とを有し、
前記ロボットの前記駆動軸部材が回動することにより、前記リンク機構を介して前記複数のスプレーガン同士の間隔を変更可能であることを特徴とするスプレーガンユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−103302(P2013−103302A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249031(P2011−249031)
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000003458)東芝機械株式会社 (843)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000003458)東芝機械株式会社 (843)
【Fターム(参考)】
[ Back to top ]