
塗装装置およびそれに関する方法
本発明は構成部品2を塗装するための塗装装置1であって、特に車両本体またはその部分を塗装するための、アトマイザーの位置を定める多軸塗装ロボット6、7と、塗装ロボット6、7を制御するためのロボット制御装置と、そしてロボット制御装置を備えた制御キャビネット8、9とからなるものに関する。本発明は、制御キャビネット8、9を、機械的に塗装ロボット6、7を支える荷重支持形の支柱の形とすることを提案する。本発明は、さらに関連する方法に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は構成部品を塗装するための、特に車両本体またはその部分を塗装するための、塗装装置に関する。さらにまた、本発明は塗装装置を製造し、試験しおよび/または据え付けるための、関連する方法に関する。
【背景技術】
【0002】
車両本体を塗装するための現代の塗装施設においては、塗布装置、例えば回転アトマイザー、を備える多軸塗装ロボットが使用される。この場合、塗装ロボットは、通常塗装ブースの外側に配置された制御キャビネット内の、塗装設備の据え付けの際に塗装ロボットに接続される、ロボット制御装置によって、作動する。さらにまた、塗装ロボットの運転のために必要な媒体、例えば圧縮空気、塗料、洗浄剤、のための各種の供給ラインも、塗装ロボットの据え付けの際に、接続されなければならない。後述するように、これらの従来の塗装施設には、種々の不利な点がある。
【0003】
一つは、最終的な据え付けの際の塗装ロボットの接続には、相当な労務費用を必要とし、そのことが据え付け費用を増加させる。さらに、ある程度の据付け時間も必要とされ、既存の塗装施設を改装する場合には、相応する塗装施設の改修時間および休止時間が増え、それは生産損失に至りうる場合がある。
【0004】
また別に、ロボット制御装置に対する接続あるいは供給ラインの接続のミスが、塗装ロボットの最終的な据え付けの際生じかねないので、塗装ロボットは、最終的な据え付けの後複雑な機能試験を受けなければならない。塗装施設の改修時間およびそれに相当する休止時間は、試験のために必要とされる時間により延長される。
【0005】
さらに、従来の技術に関しては、特許文献1、特許文献2、特許文献3、特許文献4および特許文献5が参照される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】独国実用新案第9212718号明細書
【特許文献2】独国特許第2915603号明細書
【特許文献3】独国特許第69102353号明細書
【特許文献4】独国特許出願公開第4430234号明細書
【特許文献5】独国特許第69629246号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、従って、最適に改良された塗装装置および関連する方法を提供することである。
【0008】
一方では、顧客の施設で塗装ロボットの最終的な据え付けのために必要な導入時間を減らすことが望ましく、それは、対応して塗装施設の休止時間を短縮することになる。
【0009】
他方では、本発明は、塗装施設の塗装ロボットの最終的な据え付けの際の、据え付け誤りを避けるために可能な個所に向けられている。
【課題を解決するための手段】
【0010】
この目的は、独立請求項による、本発明の塗装装置により、そして対応する方法により達成される。
【0011】
本発明は、ロボット制御装置および機械的支柱を含む、完成したモジュールとして予め組み立てられた形の塗装ロボットを供給するという、一般の技術的な教示からなり、予め組み立てられたモジュールは、それゆえ、長い据付け時間を必要とすることなく、顧客の敷地の塗装施設に容易に据え付けることができる。
【0012】
本発明の塗装装置には、多軸塗装ロボットが備えられていることが好ましい。このような塗装ロボットは、それ自体は従来の技術として説明されており、したがってより詳細を説明する必要はない。従って、本発明の塗装ロボットは、多軸ロボットハンド軸を有し、5、6、7または8つの可動軸を備えることが好ましいことのみ、簡単に述べられねばならない。好ましい実施例においては、従って、本発明の説明において、使用する「塗装ロボット」という用語は、車両本体を塗装するために同様に使用される従来の天井据え付け機や側面据え付け機とは区別されなければならない。
【0013】
塗装ロボットは、塗布装置として回転アトマイザーを案内するのが好ましいが、本発明の環境においては他の形式のアトマイザー、例えば混合気装置、空気レス装置、空気アトマイザーまたは超音波噴アトマイザーであってもよい。
【0014】
好ましくは、本発明は、例えば液体塗装または粉体塗装のような、塗料を塗布することに適している。各種の形式の塗料を、例えばプライマー、下塗りまたはクリアコートを塗布できる。しかしながら、本発明は、一例として上述した塗料の形式に限定されず、むしろ、他の形式の塗料でも原則として実施できる。
【0015】
さらにまた、本発明の塗装装置は、従来の、塗装ロボットに接続され所定のプログラムに従い制御するロボット制御装置を備える。
【0016】
ロボット制御装置は制御キャビネットに収容されるが、このこと自体は従来技術から知られている。
【0017】
本発明は、制御キャビネットが塗装ロボットのための支柱を構成すること、あるいは塗装ロボットのための支柱が制御キャビネットを構成して、ロボット制御装置を収容することを提供する。本発明の内容によれば、従って、制御キャビネットは、二重の機能を有する。制御キャビネットは、一方ではロボット制御装置を収容し、他方では塗装ロボットのための機械的支持構成要素としての役目をするからである。制御キャビネットのこの二重の機能により、ロボット制御装置および制御キャビネットを備えた塗装ロボットを事前に組立てておくことができるので都合がよく、予め組み立てられたモジュールは、それゆえ顧客の敷地の塗装施設に、容易にかつ迅速に据え付けることができる。本発明の内容によれば、従って、制御キャビネットは、塗装ロボットのための機械的支持機能を果たすことができるように、従来の制御キャビネットと比べて変更されている。
【0018】
本発明の1つの実施例において、塗装ロボットは一以上の制御キャビネットによって、のみ機械的に支えられ、制御キャビネット各々は支柱として構成される。しかしながら、支柱として構成される制御キャビネットは、他の支持構成要素と並んで単に機械的支持を提供する1つの構成要素であり、制御キャビネットは機械的に塗装ロボットを支持するのを単に補助するだけであることも、変形例として可能である。
【0019】
制御キャビネットの形状に関して、本発明は、特定の形状、例えば従来のキャビネットのそれに限定されないことも述べておかなければならない。それに代えて、制御キャビネットは、また、他の形状、例えばブラケット状またはボックス状を有してもよい。
【0020】
本発明で、ロボット制御装置および制御キャビネットを備えた塗装ロボットは支柱として事前に組立できることはすでに上述した。このようなモジュラプリアセンブリの場合、制御キャビネットは、塗装ロボットの運転のために必要な、すべての流体および電気的な供給ラインが接続できるインターフェイスを有することが好ましい。これは、塗装ロボットの運転のために単一のインターフェイスのみが接続されねばならないので、結果として、最終的な据付け時間が減るので有利である。塗装ロボットの運転のために必要な供給ラインは、この場合制御キャビネットのインターフェイスから塗装ロボットへ予め組み立てられたモジュール内で案内されるので、最終的な据え付けの際に、予め組み立てられたモジュールの範囲内で必要とされる、更なる据え付け作業はない。
【0021】
しかしながら、本発明は、支柱として構成されるロボット制御装置および制御キャビネットを有する塗装ロボットが、予め組み立てられたモジュールとして供給される上述の変形例に限定されない。その代わりに、本発明においては、塗装ロボットが、ロボット制御装置および制御キャビネットとは別々に運ばれ、そして据え付けられ、顧客の敷地内でロボット制御装置に接続されることも可能である。この変形例において、塗装ロボットは、塗装ロボットが支柱として構成される制御キャビネットに着脱可能に接続できるインターフェイスを備えるのが好ましい。塗装ロボットと制御キャビネットとの間のこのインターフェイスは、塗装ロボットと支柱として構成される制御キャビネットとの間の機械的接続のためにも機能するのが好ましい。塗装ロボットと支柱として構成される制御キャビネットとの間のインターフェイスは、従って、制御キャビネットと塗装ロボットとの間に、塗装ロボットの運転のために必要なすべての流体供給ライン(例えば塗料、洗浄剤および圧縮空気のためのライン)および電気的な供給ライン(例えば制御ラインおよびセンサ・ライン)を収容していることが好ましい。
【0022】
上述の2つの変形例(予め組み立てられたモジュールおよび予め組み立てられていないモジュール)においては、それぞれのインターフェイスは、例えば回転アトマイザーの圧縮空気タービンを駆動するための、塗装ロボットに圧縮空気を供給するために必要な空気圧系を備えることが好ましい。さらにまた、インターフェイスは、塗布される塗料を供給するための少なくとも一つの塗料ラインを備えることが好ましい。本発明は、好ましくは洗浄剤ラインを備え、それを介して色替えの際に洗浄剤を、塗装ロボットと特に回転アトマイザーを、洗浄するために供給できる。同じ理由から、インターフェイスは、塗装ロボットからの洗浄剤および/または塗料の帰還ための、もどり管路を備える事も好ましい。さらにまた、インターフェイスは、ロボット制御装置によるロボットの運転のための、電気的な制御ラインおよび/または塗装ロボットからロボット制御装置へセンサ計量値を通知するための少なくとも1本のセンサ・ラインを収容していることも好ましい。
【0023】
塗装ロボットは、例えば多軸のロボットハンド軸(5、6、7または8可動軸)を含む、多軸塗装ロボットであるのが好ましいことはすでに前に述べた。塗装ロボットは、移動可能であるかまたは固定して取り付けられたロボット・ベース、回転可能なロボット部分、回動可能な基部に近いロボットアーム(「アーム1」)および回動可能な末端のロボットアーム(「アーム2」)を備えるのが好ましい。
【0024】
本発明の実施例において、回転可能なロボット部分は、ロボット・ベースに対し実質的に垂直回転軸について回転可能であり、回転可能なロボット部分は、ロボット・ベースの下に配置されるのが好ましい。回転可能なロボット部分の回転軸に関して、本発明は厳密な垂直回転軸に限定されない。それに代えて、回転軸はわずかに曲がっていてもよい。この実施例の唯一の重要なことは、回転可能なロボット部分の回転軸は、実質的に垂直なことである。この実施例において、基部に近いロボットアームは、実質的に水平な旋回軸について回動可能であることが好ましく、これは同様に、基部に近いロボットアームに対して水平旋回軸について回動可能であることが好ましい末端のロボットアームにも当てはまる。
【0025】
本発明の別の実施例において、回転可能なロボット部分は、対照的にロボット・ベースに対し実質的に水平な回転軸について回転可能である。この実施例においては、対照的に基部に近いロボットアームの、そして末端のロボットアームの旋回軸は回転可能なロボット部分の回転軸に直角であり、特に塗装施設の構成部品の搬送方向に対して直角であることが好ましい。この実施例は、例えば、バンパーを塗装するのに適している。
【0026】
回転可能なロボット部分の異なる回転軸による上記の両実施例において、回転可能なロボット部分は、選択的に、ロボット・ベースの下に、ロボット・ベースより上に、またはロボット・ベースの脇に配置されうる。しかしながら、回転可能なロボット部分がロボット・ベースの下に配置される場合は特に有利である。その場合、塗装ロボットが、特に車両本体の内部を塗装することに適しているからである。
【0027】
さらにまた、本発明は、塗装ロボット内に供給ホースの特別な案内を備えており、当該供給ホースは塗装ロボットの運転のために必要である。例えば、塗装ロボットにおいて、塗装ロボットの運転のために必要な媒体(例えば圧縮空気、塗料および洗浄剤)は、ロボット・ベースから末端のロボットアームまで、続いてロボットハンド軸を通ってアトマイザーまで輸送されなければならず、通常これらのために、ロボット動作に従って変形する柔軟性のある供給ホースが備えられる。好ましくは、これらの供給ホースは、いずれの場合においても、隣接するロボット各部間の個々の継手内の、いわゆる中性繊維(neutral fiber)を通して案内される。中性繊維は、継手を通る想像線であって、継手の回転に際し長さ方向の張力あるいは圧縮の応力を受けず、曲げ負荷だけを受ける。供給ホースは、軸方向の機械的応力にさらされないために、継手の中性繊維の供給ホースの設置は利点がある。
【0028】
さらにまた、供給ホースはいずれの場合も継手の回転軸を通り抜けるので、同様に供給ホースに対する機械的応力を減らすこととなるのは好ましい。
【0029】
さらに、塗装ロボットの個々の供給ホースは、各場合において、回転可能なロボット部分から末端のロボットアームまでのホース平面にあるのが好ましく、それによりロボットアームの軸周りの旋回の際、供給ホースはホース平面においてだけ曲げられる。ホース平面は、したがって、ロボットアームの回転軸に直角であることが好ましい。この技術的な手段は、また、ロボット位置の変更の際、供給ホースに対する機械的応力を減らして、したがって供給ホースの寿命を延長する。
【0030】
さらにまた、本発明の塗装ロボットは、例えば所望の色を選択するための色チェンジャーのような、塗装設備を備えることが好ましく、色チェンジャーは、入力側が複数の色フィードラインに、そして出力側がアトマイザーに接続される。塗装ロボットに、またはその中に取り付けられる塗装設備は、例えば、計量シリンダ、プランジャポンプ、ラジアルネジ(Radialschrauben)のような、計量ポンプまたは他の計量システムを備えてもよい。塗装ロボットに、またはその中に取り付けられる塗装設備は、計量ポンプまたは他の塗装設備を駆動するためのモータを備えてもよい。塗装ロボットに、またはその中に取り付けられる塗装設備は、塗布圧を調整するための塗料圧力調整器および/または静電塗装のために必要な高電圧を発生させるための高電圧発生器を備えてもよい。
【0031】
上述した塗装設備は、基部に近いロボットアームに、またはその中に配置されることができる。代わりに、本発明においては、塗装設備を、末端のロボットアームに、またはその中に配置することも可能である。塗装設備は、異なるロボットアームに分散するように配置される。あまり使用されない塗料(「ロー・ランナ(Low Runner)」)のための塗装設備は、基部に近いロボットアーム(「アーム1」)に、またはその中に位置し、よく使用される塗料のための塗装設備は末端のロボットアーム(「アーム2」)に、またはその中に位置するのが好ましく、そうすればよく使用される塗料(「ハイ・ランナ(High Runner)」)の色替え損失を最も低くすることができる。
【0032】
本発明の好ましい実施例においては、末端のロボットアームは、いわゆるエルボ継手を介して基部に近いロボットアームに回動可能に接続され、エルボ継手は、少なくとも一のロボット位置において、下方へ案内される(「エルボ・ダウン」)。
【0033】
この場合、ロボット・ベースは、アトマイザーがロボット・ベースの下に位置するように、塗装される車両本体より上に配置されるのが好ましい。余分なコーティング剤残留物(「オーバースプレー」)は、塗装ブース内の下方向への気流によって、下方へ押し出され、したがって、高い位置にある塗装ロボットにはより少なく蓄積するので、塗装ロボットのこの高い配置は、とりわけ有利である。塗装ロボットの高い配置は、このように塗装ロボットの汚れ易さを少なくするので都合がよい。
【0034】
一つのロボット位置にある末端のロボットアームが実質的に水平に動作して、内部を塗装するために車両本体の内部に水平方向に案内されうるとき、このロボット位置(「エルボ・ダウン」)は車両本体の内部塗装を容易にする。
【0035】
「エルボ・ダウン」のロボット位置において、末端のロボットアーム(「アーム2」)の機構は、「エルボ・アップ」のロボット位置より大きくできる。これは、より多くの塗装設備を末端のロボットアームに設置することができ、その結果、塗料および溶媒の消費が減らされることを意味する。
【0036】
さらにまた、本発明の塗装ロボットは、基部に近いロボットアームと末端のロボットアームとの間のエルボ継手を上方へ案内するロボット位置(「エルボ・アップ」)を取ることもできることが好ましい。
【0037】
本発明の塗装装置は、塗装装置を通して塗装される構成部品を搬送するコンベヤも備えることが好ましいが、これ自体は、従来技術から知られており、したがってより詳細に説明する必要はない。ロボット・ベースは、この場合コンベヤに対し上方向に、特に塗装される構成部品の上側より上の高さに、オフセットされるのが好ましい。塗装ロボットのこの高い配置は、すでに上述したように、塗装ロボットの汚れ易さを低くする。塗装ブース中を上から下へ通る直線の流れは、構成部品に付着していない塗料の粒子(「オーバースプレー」)を押し下げるからである。
【0038】
本発明の1つの変形例では、ロボット・ベースが動かないように、ロボット・ベースは固定して取り付けられる。このため、ロボット・ベースは、支柱を構成している制御キャビネットに直接取り付けられてもよい。
【0039】
しかしながら、変形例として、塗装ロボットと共にロボット・ベースが移動レールを移動できるようにすることも可能である、これ自体は、従来技術から知られており、したがってより詳細に説明する必要はない。塗装ロボット、ロボット制御装置および支柱として構成される制御キャビネットから成る上述のモジュールのプリアセンブリ(事前組立体)の場合、その予め組み立てられたモジュールが移動レールを含むのも好ましい。
【0040】
本発明の1つの実施例においては、塗装装置は、さらに塗装される車両本体のフードあるいはドアを開閉することのできるハンドリング・ロボットを有するので、実際の塗装ロボットは、車両本体内部の塗装を実施できる。ハンドリング・ロボットは、この場合移動レールに取り付けることができ、その場合、移動レールは、支柱として構成される制御キャビネットに同様に取り付けられるのが好ましい。上述した予め組み立てられたモジュール構造の場合、予め組み立てられたモジュールは、したがって、ハンドリング・ロボット用の移動レールおよび/またはハンドリング・ロボットを備えることもできる。
【0041】
本発明において、ハンドリング・ロボット用の移動レールは、支柱として構成される制御キャビネットにより、機械的に支えられてもよい。しかしながら、ハンドリング・ロボット用の移動レールは、追加的にさらに機械的支持構造物によって支えられることも可能である。
【0042】
さらに、ハンドリング・ロボット用の移動レールは、塗装ロボットも固定して取り付けられているその同じ支柱に取り付けられることが可能である。
【0043】
塗装ロボットは支柱のハンドリング・ロボットより上に取り付けられるのが好ましく、それは運転を容易にすることも述べておくべきである。
【0044】
ハンドリング・ロボット用の移動レールは、いわゆるスタブ(短い)レールとして構成されてもよいことも述べておくべきである。これは、ハンドリング・ロボット用の移動レールは塗装ブースより短いことを意味する。
【0045】
さらにまた、ハンドリング・ロボット用の移動レールは、構成部品の搬送方向に、塗装ロボットに対してオフセットされて配置されると都合がよいかもしれない。これは、塗装される構成部品が、高速の搬送速度で塗装ブースを通って搬送される場合、特に有利である。搬送方向へのハンドリング・ロボット用のハンドリング・レールのオフセットは、その場合ハンドリング・ロボットにより多くの時間を与えることになるからである。
【0046】
塗装ロボットは、塗装ブース内に配置されるのが好ましく、塗装ブースは平らなブース壁(「クリーンな壁」)を備えるのが好ましいことはすでに上述した。
【0047】
さらにまた、塗装ブースのブース壁は、外側から塗装運転を視覚的に監視できるよう、少なくとも部分的に透明であるか、または少なくとも一つの視界窓を有するのが好ましい。
【0048】
この点について、支柱として構成される制御キャビネットは、塗装ブースの外側に配置されるのが好ましいことも述べておくべきである。これは、制御キャビネットに収容されるロボット制御装置の保守作業を遂行するために、塗装ブースに入る必要はないという利点を提供する。
【0049】
本発明の1つの変形では、塗装ロボットは、アトマイザーに加えて、塗装される車両本体のドアまたはフードを開くためのハンドリング・グリップを備える。塗装ロボットは選択的に塗料を塗布するかまたはハンドリング・ロボットとして働くことができるので、塗装ロボットは、従って、この実施例においては二つの機能をもつ。
【0050】
本発明の更なる実施例では、制御キャビネットを構成する支柱は、固定して配置されず、むしろ移動可能である。一例として、支柱は一以上の移動レールを移動可能でありえ、その場合、支柱のための移動レールは、塗装される車両本体の搬送方向に平行に配向されるのが好ましい。支柱は垂直に配向されるのが好ましく、その場合、塗装ロボットは垂直方向の支持支柱に沿って移動可能である。
【0051】
本発明の1つの変形例では、塗装ロボットは、移動レールに沿って移動可能であり、この場合、移動レールは、移動レールが塗装ラインに沿うように、塗装される構成部品の搬送方向に配向されるのが好ましい。塗装ロボットは、この場合実質的に垂直方向のキャリアにより移動レールに接続され、キャリアは、その上側が移動レールに案内され移動レールに沿って移動できると共に、その下側に塗装ロボットのロボット・ベースを乗せる。この場合、従って、キャリアは、塗装ロボットが高い位置の移動レールに沿って移動可能にもかかわらず、塗装ロボットのロボット・ベースは塗装ブースのより低い領域に位置することを確実にする。移動レールと塗装ロボットとの間のキャリアは、したがって、移動レールに対して塗装ロボットが低く位置することを可能とする。
【0052】
さらに、本発明は、塗装装置を通って所定の搬送方向に塗装される構成部品を搬送するコンベヤが塗装ブースに設けられる変形例を含むが、このようなコンベヤ自体は従来技術に属し、したがってより詳細に説明する必要はない。塗装ロボットは、この場合同様に移動レールに移動可能に設けられるが、1つの特別な特徴は、移動レールが塗装される構成部品の搬送方向を横切って配置されることである。この変形例では、従って、塗装ロボットのための移動レールは塗装される構成部品の搬送方向に直角にわたるのが好ましく、この結果、非常に短いブース長を有する塗装ブースを設置することが可能である。
【0053】
塗装ロボットのために横断方向の移動レールを有する変形例において、移動レール上の塗装ロボットのための動作クリアランス(間隙)は通常は塗装ブースの側面のブース壁によって制限をうける。横断方向にわたる走行移動レールの塗装ロボットの動作クリアランスを延長するために、従って、本発明の1つの変形例では、ブース壁が横断方向にわたる移動レールの延長部分に側面の凹みを有するので、移動レールの塗装ロボットは塗装ブースの凹みに移動して入ることができるようになっている。本発明のこの変形例では、塗装ブースのブース幅は、従って、一定でなく、ブースの長さに亘りむしろ異なり、塗装ロボットのための移動レールの脇のブース幅は、塗装ロボットのための移動レールの搬送方向の前後より大きい。
【0054】
本発明は、少なくとも2つのロボットアームまたは他のそのようなロボット部分が可動に関節でつながれたロボット・ベースを備えた、新規な塗装ロボットをも含む。本発明の1つの変形では、2本のロボットアームは、各々アトマイザーを案内する。対照的に、本発明の別の変形例では、1つのロボットアームはアトマイザーを案内し、別のロボットアームがハンドリング工具、特に、車両本体のフードまたはドアを開閉するためのグリッパー(把持具)を案内するようになっている。
【0055】
さらに、本発明は、本発明の塗装装置を製造、試験および/または据え付けるための方法をも含む。本発明の方法は、それが塗装ロボットを機械的に支持できるように、制御キャビネットは製造の際、機械的に補強される事を特徴とする。
【0056】
本発明の製造方法は、また、塗装ロボットは、支柱として構成される制御キャビネットに対し、直接にまたは移動レールまたは取付けアダプタの手段により取り付けられることを特徴とする。
【0057】
本発明の方法において、塗装ロボット、制御キャビネット、ロボット制御装置および/または移動レールを備えたモジュールのプリアセンブリ(事前組立)が最初に行われるのが好ましく、このプリアセンブリは、顧客の敷地ではなく製造業者の敷地で行われる。
【0058】
モジュールのこのプリアセンブリでは、予め組み立てられたモジュールを試験できるのが好ましく、試験は、同様に製造業者の敷地で行われる。この試験の際、最初にアトマイザーの流体機能を試験できる。従って、アトマイザーが正しく作動するかどうか試験することが可能である。さらに、予め組み立てられたモジュールの試験は、塗装ロボットの正しい動作能力を試験することをも含むことができる。予め組み立てられたモジュールの試験の際、コーティング剤の静電帯電が正しく機能しているかどうか試験する事も可能である。最後に、予め組み立てられたモジュールの試験の際、塗装ロボットがその移動レール上で正しく移動できるかどうか試験することも可能である。
【0059】
本発明の方法は、続いて、予め組み立てられたモジュールを顧客の敷地の据え付け現場へ輸送することをも備えるのが好ましい。
【0060】
さらにまた、本発明の方法は、続いて 据え付けの現場での予め組み立てられたおよび/または試験されたモジュールの最終的な据え付けをも含むのが好ましく、モジュールはそこで機械的に固定され、塗装ロボットの、そして関連するアトマイザーの運転のために必要なすべてのラインに接続される。更なる試験は、その時しかしながら、通常は必要でなく、その結果、最終的な据付け時間はかなり減らされる。
【0061】
本発明の塗装ロボットは、その構成(「エルボ・ダウン」)のため車両本体の内部を塗装するのに非常に適している事は、すでに上述した。本発明の方法は、従って、車両本体の内部を塗装することをも含み、その際塗装ロボットは、基部に近いロボットアームと末端のロボットアームとの間のエルボ継手が下方へ案内されるように、位置を定められる。アトマイザーを備えた末端のロボットアームは、それから、その末端のロボットアームが塗装される車両本体の側に、続いて塗装される構成部品の搬送方向に対し直角に、その位置を定められる。アトマイザーを備えた末端のロボットアームは、その時実質的に水平に配向され、塗装される車両本体の内部に、その内部を塗装するために、水平方向に案内される。
【0062】
本発明の他の有利な更なる展開は従属クレームに特徴付けられるか、または図を参照して本発明の好ましい実施例の記載と共に、以下に更に詳細に説明される。
【図面の簡単な説明】
【0063】
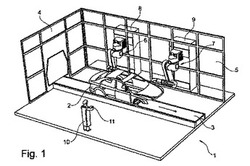
【図1】固定して設置される2台の塗装ロボットを有する塗装ブースの斜視図を示す。
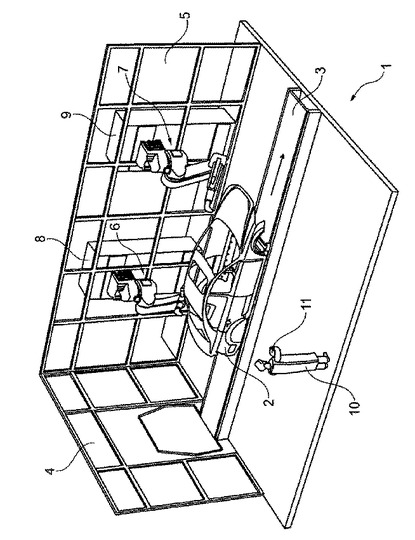
【図2A】図1の塗装ロボットの異なる斜視図を示す。
【図2B】図1の塗装ロボットの異なる斜視図を示す。
【図2C】図1の塗装ロボットの異なる斜視図を示す。
【図2D】図1の塗装ロボットの異なる斜視図を示す。
【図2E】図1の塗装ロボットの異なる斜視図を示す。
【図2F】図1の塗装ロボットの異なる斜視図を示す。
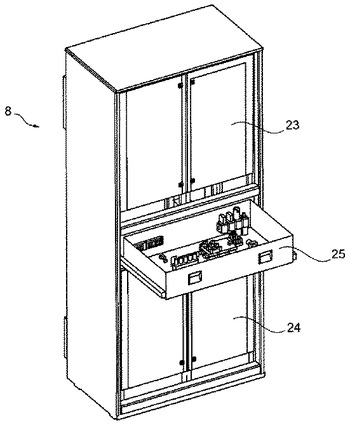
【図3】図1に示される塗装ブースから見た、支柱として構成される制御キャビネットの斜視図を示す。
【図4】固定して設置された塗装ロボットと、塗装ロボットの下のスタブ・レール上を移動可能なドア・オープナとを有する、塗装ブースの斜視図を示す。
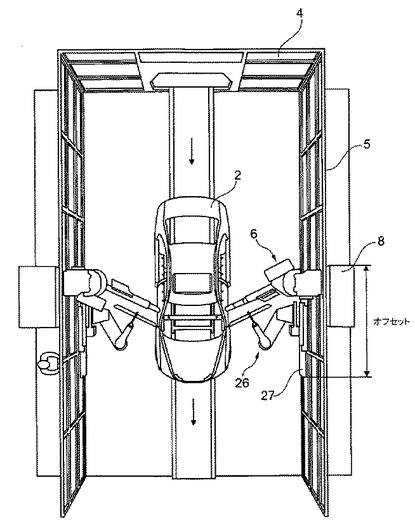
【図5】図4の塗装ブースの平面図を示す。
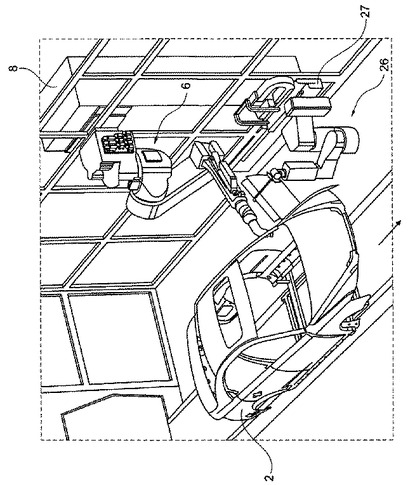
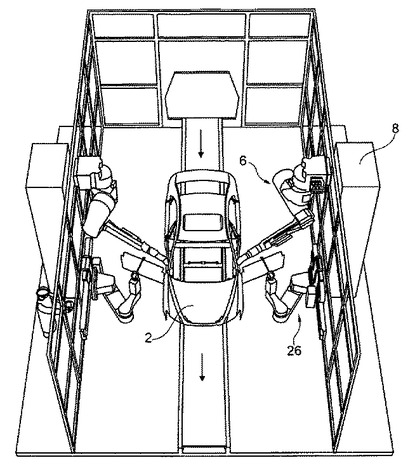
【図6】図4および5の塗装ブースの斜視図を示す。
【図7】2台の塗装ロボットが位置を変えることができ、また2台のハンドリング・ロボットも移動可能な、移動レールを有する塗装ブースの斜視図を示す。
【図8】移動可能な塗装ロボットおよび同様に移動可能なハンドリング・ロボットを有する、本発明の塗装ブースの正面図を示す。
【図9】それぞれ2つの塗装ロボットおよび2つハンドリング・ロボット用の2つの移動レールを有する塗装ブースの斜視図を示す。
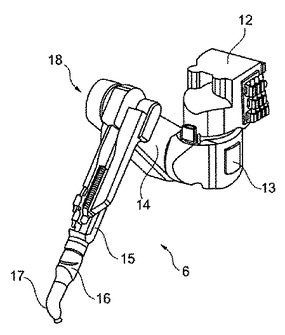
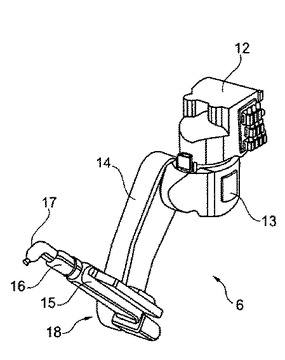
【図10】ハンドリング・ロボットとして代わりに使用できる、2台の塗装ロボットの斜視図を示す。
【図11】固定して設置される2台の塗装ロボットを有する、塗装ブースの斜視図を示す。
【図12】塗装ロボットは制御キャビネットを構成する移動可能な支柱に設置されている、移動可能な塗装ロボットの斜視図を示す。
【図13】それぞれ2台の塗装ロボットのための2本の移動レールを有し、当該移動レールは車両本体の搬送方向に対し直角な、本発明の塗装ブースの斜視図を示す。
【図14】図13の塗装ブースの平面図を示す。
【図15】車両本体の搬送方向に平行な、図13および図14の塗装ブースの斜視図を示す。
【図16】上部にある移動レールを有し、塗装ロボットは当該移動レールに移動可能で、当該移動レールに対して下方にある、本発明の塗装ブースの実施態様の変形実施例の斜視図を示す。
【図17】車両本体の搬送方向に平行な、図17の塗装ブースの斜視図を示す。
【図18】ロボットアームが可動に関節でつながれるロボット・ベースを備えた、本発明の塗装ロボットの実施例の図を示す。
【図19】運動学的に平行に配置された複数のロボットアームを有する塗装ロボットの変形実施例の斜視図を示す。
【発明を実施するための形態】
【0064】
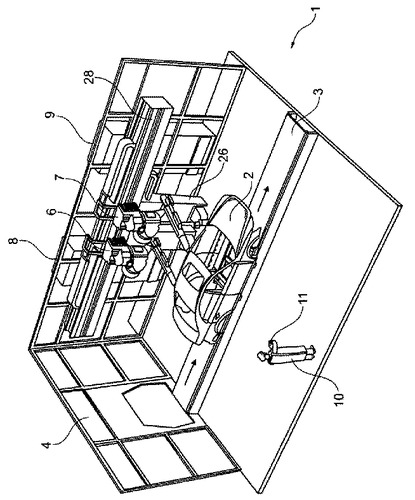
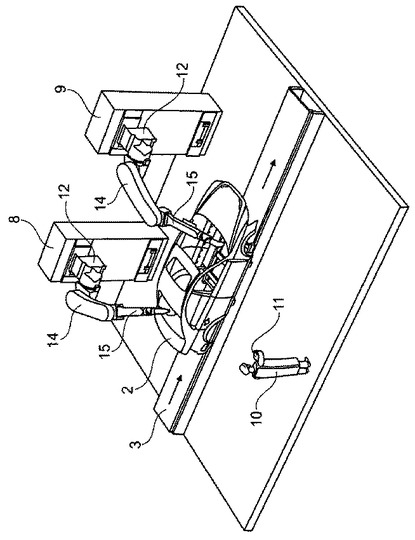
図1の斜視図は、車両本体2を塗装するための塗装施設に配置される、本発明の塗装ブース1を示し、ここで車両本体2は、矢印により示される方向に、搬送装置3により塗装ブース1を通って搬送される。
【0065】
更に、車両本体2に他のコーティング剤を塗布するための塗装ブースを、塗装ブース1の前後の搬送方向に配置できる。一例として、塗装ブース1で下塗り層を車両本体2に塗布してもよい。そしてプライマーは前もって先行する塗装ブース(図示せず)で車両本体2に塗布される。クリアコート層は、続けて、搬送方向の下流側に配置された塗装ブース(図示せず)で車両本体2に塗布される。
【0066】
塗装ブース1は、周囲全体に連続する平らなブースの壁4、5を有し、塗装ブース1の内部が見えるように、ブースの壁は部分的に示されてない。平らなブースの壁4、5は、汚れにくくまた容易に清掃できる利点がある。
【0067】
ブースの壁4、5はほとんど透明であって、そのため塗装ブース1の外側に位置する人が視覚的に塗装ブース1の内部で行われている塗装運転をモニタすることができることも述べておかねばならない。
【0068】
塗装ブースにおいて、2台の多軸塗装ロボット6、7は、支柱として構成される制御キャビネット8、9に固定して各々取り付けられる。
【0069】
ここで、2つの制御キャビネット8、9は、塗装ブース1の外側に位置し、ロボット塗装ロボット6、7を作動させる制御装置を収容している。保守は、従って、保守スタッフが塗装ブース1に入らずに、制御キャビネット8、9内のロボット制御装置で行うことができる。
【0070】
制御キャビネット8、9は、従来の制御キャビネットと比較して機械的に補強され、ロボット制御装置を収容することに加えて、塗装ロボット6、7のための機械的支持機能を果たすことができる。
【0071】
ここで、2台の塗装ロボット6、7と付随する制御キャビネット8、9およびその中のロボット制御装置は、塗装ロボットの製造者により予め組み立てられかつ試験された形で供給される、予め組み立てられたモジュールを構成し、したがってこれらのモジュールは最終的な据付けの際、顧客の敷地に設置するだけで良い。最終的な据え付けの際、従って、必要とされるのは、制御キャビネット8、9の機械的固定および運転のために必要なラインに対する制御キャビネット8、9の接続(例えば圧縮空気、塗料、水洗浄剤、電力、その他のための)が全てである。
【0072】
制御キャビネット8、9に位置するロボット制御装置は、携帯型プログラム装置11により、塗装ブース1の外側の操作者10によってプログラムされることができ、プログラム装置11は、ロボット制御装置から、そしてそれにデータを無線送信できる。
【0073】
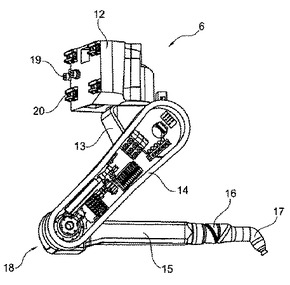
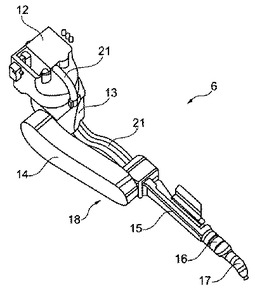
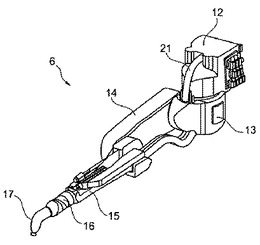
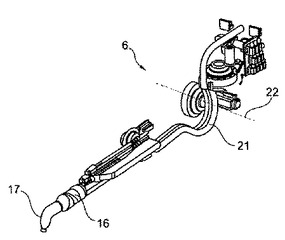
図2A〜図2Fは、塗装ロボット6、7の構造を示す。
【0074】
塗装ロボット6、7は、実質的に、ロボット・ベース12、回転可能なロボット部分13、基部に近いロボットアーム14、末端のロボットアーム15、ロボットハンド軸16および回転アトマイザー17から成る。
【0075】
回転可能なロボット部分13は、この場合ロボット・ベース12の下に配置され、ロボット・ベース12に対し垂直回転軸について回転可能である。
【0076】
逆に、基部に近いロボットアーム14は、回転可能なロボット部分13に対し水平旋回軸について回動可能である。
【0077】
末端のロボットアーム15も同様であり、基部に近いロボットアーム14に対し水平な旋回軸について回動可能である。
【0078】
基部に近いロボットアーム14は、エルボ継手18によって末端のロボットアーム15に接続されることも述べておかねばならない。図2Aに示されるロボット位置において、エルボ継手18は、上方へ案内されている(「エルボ・アップ」)。図2Bに示されるロボット位置において、エルボ継手18は、逆に下方へ案内されている(「エルボ・ダウン」)。下方へ案内されたエルボ継手18を有する図2Bに示されるロボット位置は、車両本体2の内部を塗装するのに特に適している。末端のロボットアーム15が、塗装される車両本体2の横に容易に導入されうるからである。
【0079】
図2Cから、ロボット・ベース12は、塗装ロボット6の運転のために必要な供給管路を接続するためのインターフェイス19を有することもわかる。さらにまた、ロボット・ベース12は、塗装ロボット6を制御キャビネット8に取り付けるための機械的インターフェイス20も備える。
【0080】
図2Cから、例えば計量手段、色チェンジャーまたは高電圧カスケードのような塗装設備が、基部に近いロボットアーム14に取り付けられていることもわかる。
【0081】
図2Dの斜視図から、塗装設備は末端のロボットアーム15にも設置され、塗装ロボット6の運転のために必要とされる塗装設備が2つのロボットアーム14および15にわたり分配されていることがさらにわかる。
【0082】
図2D〜図2Fは、フレキシブルな供給ホースがロボット・ベース12と回転アトマイザー17との間にあり、例えば、塗布される塗料を供給することも示している。
【0083】
一方、回転可能なロボット部分と各場合の末端のロボットアーム15との間の供給ホース21は、ロボットアーム14、15の旋回軸に直角に配向したホース平面にあることを、ここで述べておくべきである。これは、供給ホース21は、ロボットアーム14、15の軸周りの旋回の間、ホース平面、すなわち一方向へのみの曲げ負荷にさらされるだけであることを意味する。
【0084】
他方、基部に近いロボットアーム14は、回転可能なロボット部分13に対し旋回軸22について回動可能であることを述べておくべきであり、そこでは、供給ホース21は、基部に近いロボットアーム14と回転可能なロボット部分13との間の継手の旋回軸22を通って案内される。供給ホース21は、基部に近いロボットアーム14の軸周りの旋回動作の間、比較的軽微な機械的応力のみがかかるという利点がある。
【0085】
同じ理由から、継手の供給ホース21は、いずれの場合でもいわゆる中立の繊維組織内に案内され、その中では、曲げ負荷だけで、軸方向の張力や圧縮の力は供給ホース21に生じない。
【0086】
図3は、制御キャビネット8の斜視図を示し、図1に示される制御キャビネット9は、構造的に同一である。
【0087】
制御キャビネット8は、上部領域と下部領域の両方にロボット制御装置23、24のためのスペースを有する。
【0088】
さらにまた、制御キャビネット8は、中央に、例えば予備部品、操作指示書あるいは雑巾も収容できる引き出し25を有する。
【0089】
図4〜図6は、上述した塗装ブース1にほとんど対応する、本発明の塗装ブース1の実施態様の変形例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0090】
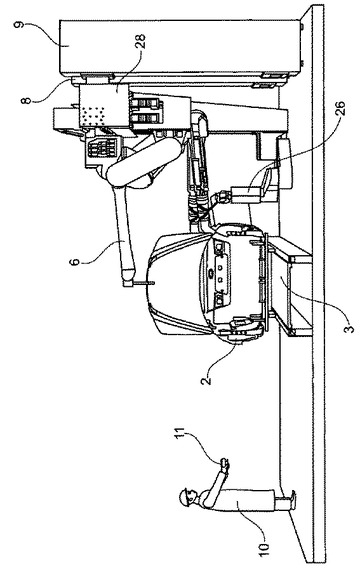
この実施例の1つの特別な特徴は、塗装ロボット6に加えて、塗装ロボット6による次の内部塗装のために、車両本体2のドアを開く作業を有するハンドリング・ロボット26が備えられていることにある。
【0091】
ハンドリング・ロボット26は、スタブ・レール27上の塗装ロボット6の下に取り付けられ、矢印により示される方向に移動可能である。
【0092】
ハンドリング・ロボット26用のスタブ・レール27は、塗装ロボット6に対し、搬送方向において、オフセットされるように配置されている。これには、一旦塗装ロボット6による内部塗装が終わっても、車両本体2がハンドリング・ロボット26の領域から矢印により示される方向に移動する前に、ハンドリング・ロボット26はなお、車両本体2のドアを閉めるのに十分な時間をもてるという利点がある。
【0093】
完璧を期すため、上述の塗装装置は、塗装ブースにおいて、車両本体2の両側に対称的に配置されることが指摘されなければならない。
【0094】
図7および図8は、上述した塗装ブース1にほとんど対応した、本発明の塗装ブース1のさらなる実施例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0095】
この実施例の1つの特別な特徴は、この実施例の塗装ロボット6、7は、固定して据え付けられてなく、むしろ共通の移動レール28上にあることである。
【0096】
さらにまた、この実施例のハンドリング・ロボット26は、移動レール28に懸架されている。
【0097】
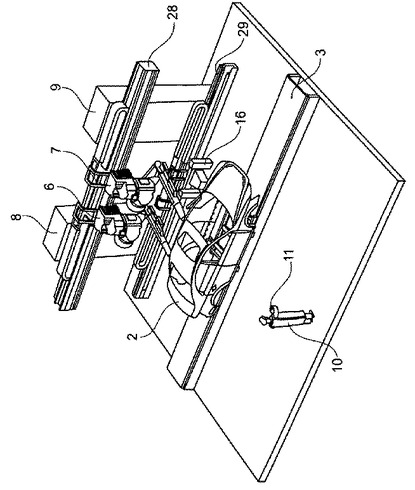
図9は、上述した塗装ブース1にほとんど対応した、本発明の塗装ブース1他の実施例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0098】
この実施例の1つの特別な特徴は、更なる移動レール29が、支柱として構成される制御キャビネット8、9に、そのより低い領域に取り付けられていることである。この場合の移動レール29はハンドリング・ロボット26を支えるが、上部移動レール28は塗装ロボット6、7を支えている。
【0099】
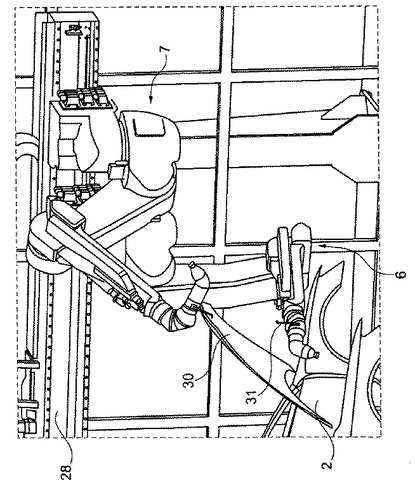
図10は、回転アトマイザー17に加えて、ハンドリング・グリップ30を備える、変形された塗装ロボット6の斜視図を示し、これにより塗装ロボット6は車両本体2のフード31を開閉することができる。塗装ロボット6は、従って、この実施例において、2つの機能をもち、選択的に塗料を塗布するかまたはハンドリング・ロボットとして働くかすることができる。
【0100】
最後に図11は、上述した塗装ブース1にほとんど対応する、本発明の塗装ブース1の実施例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0101】
この実施例の1つの特別な特徴は、ロボット・ベース12と回転可能なロボット部分13との間の回転軸は水平に配向され、搬送装置の移送方向3に平行であることにある。
【0102】
基部に近いロボットアーム14の、そして末端のロボットアームの旋回軸は、ここでは反対に搬送装置の移送方向3に直角に配向された平面にある。
【0103】
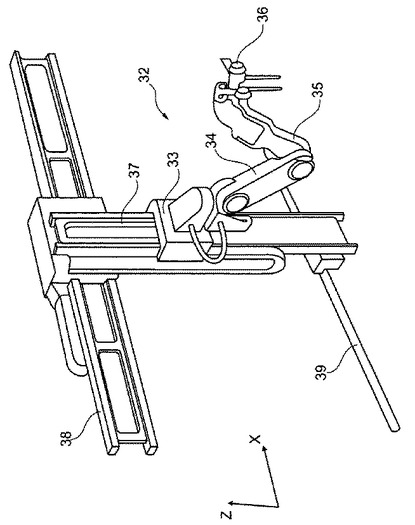
図12は、移動可能な塗装ロボット32を備えた本発明の塗装装置の更なる実施例を示し、ここでは、塗装ロボット32は、ロボット・ベース33、基部に近いロボットアーム34、末端のロボットアーム35および末端のロボットアーム35に案内されるアトマイザー36を備える。
【0104】
塗装ロボット32は、支持柱37上の垂直方向(Z方向)に移動可能である。ここで1つの特別な特徴は、支柱37は、塗装ロボット32を機械的に案内するために機能するだけでなく、むしろ塗装ロボット32のためのロボット制御装置および/または塗装設備も収容し、そこでは塗装ロボット32のための空気圧システムは、支持支柱37に一体化されることができることにある。この実施例において、従って、支持支柱37は、塗装ロボットのための制御キャビネットを構成する。
【0105】
支持支柱37はX方向に、すなわち塗装される車両本体の搬送方向において、1つが他方より上に位置する2本の平行移動レール38、39上において、移動可能である。
【0106】
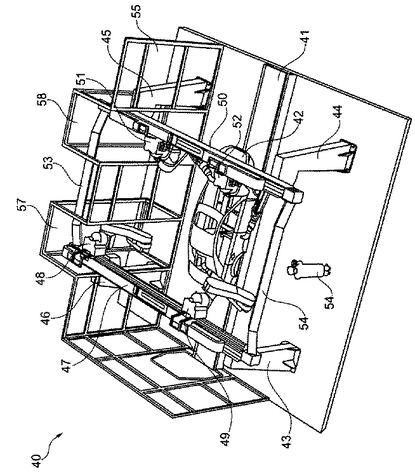
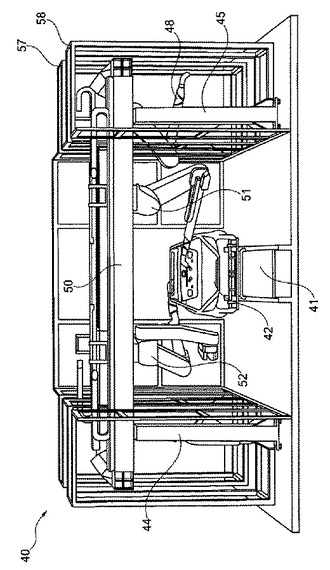
図13および図15は、塗装施設において、配置できる本発明の塗装ブース40の更なる実施例を示し、さらなる塗装ステーションが、塗装ブース40の搬送方向の前後に設けられる。
【0107】
塗装ブース40を通っているのは、車両本体42が塗装ブース40を通して直線的に移送するコンベヤ41であり、これは、従来の技術からそれ自体は知られており、したがって詳細に説明するまでもない。
【0108】
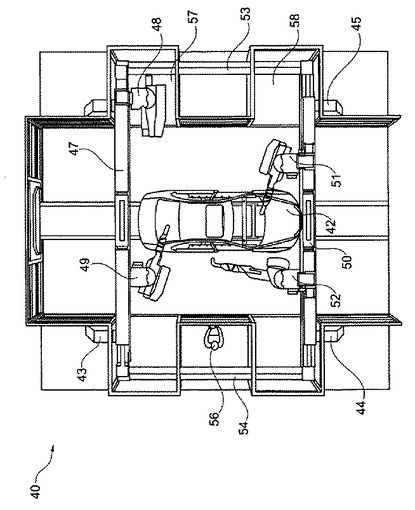
塗装ブースの外側に位置するのは4つの支持支柱43、44、45、46であり、そこで入口側に配置される支持支柱43、46は、入力側に配置されて、コンベヤ41の搬送方向に直角な移動レール47を乗せている。2台の塗装ロボット48、49は、コンベヤ41の搬送方向に直角に、移動レール47に沿って位置を変えることができる。
【0109】
出口側に配置された2つの支持支柱44、45は、それらの上側に共同で、同様にコンベヤ41の搬送方向に直角に配向された更なる移動レール50を乗せている。2台の塗装ロボット51、52は、同様に移動レール50に移動可能に配置される。
【0110】
塗装ロボット48、49および51、52は、各々いわゆる逆運動力学(inverse Kinematik)を有する。これは、塗装ロボット48、49、51、52のロボット・ベースは、従来の塗装ロボットと比較すると逆さであり、塗装ロボット48、49、51、52のロボットアームがそれぞれのロボット・ベースの下に位置することを意味する。
【0111】
2つの移動レール47、50は、それらの端部で互いに各々長手方向の支柱53、54に接続されるので、長手方向の支柱53、54と2本の移動レール47、50は安定な骨組を構成する。
【0112】
塗装ブース40は、側面から、そして周辺のブースの壁55によりその端部側で区切られ、ブースの壁55は透明なため、塗装ブース40の外側にいる操作者56は、外側から塗装ブース40内部で行われている塗装工程を視覚的に監視できる。
【0113】
ブースの壁55は、いずれも側面から2本の移動レール47、50の延長方向に側面の凹み57、58を有するので、塗装ロボット48、49および51、52は、移動レール47、50上を、側面の方向に凹み57、58内に移動することができ、そのため側面の方向の塗装ロボット48、49、51、52の動作距離のゆとりが増すことも述べておくべきである。側面の凹み57、58間の塗装ブース40のブース幅は、凹み57、58の領域より小さいので、特に図14から見て取れるように、操作者56は、より至近距離から塗装ブースの内部で行われている塗装工程を監視することができる。
【0114】
図16および図17に示される実施例は、ほとんど図9に示される実施例に対応するので、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0115】
この実施例の1つの特別な特徴は、塗装ロボット6が上部移動レール28で移動可能場合であっても、塗装ロボット6は移動レール28に対して下方へオフセットされるように配置されていることにある。このため、移動レール28に沿ってその上側で移動可能な、実質的に垂直方向のキャリア59が使用され、キャリア59はその下側に塗装ロボット6のロボット・ベースを乗せている。キャリア59は、従って上部移動レール28に対して塗装ロボット6を下降させるのに役立つ。
【0116】
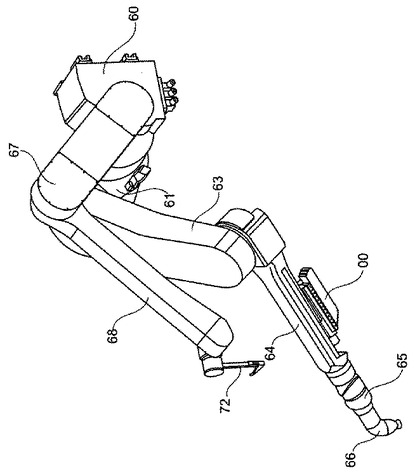
図18は、固定して配置されるかまたは移動レールで移動可能な、ロボット・ベース60を備えた塗装ロボットの斜視図を示す。
【0117】
2つのロボット部分61、62は、ロボット・ベース60の対向する側に、回転可能に取り付けられ、そこでは、2つのロボット部分61、62は、共通のロボット・ベース60に対して、共通の、水平な回転軸について回転することができる。
【0118】
基部に近いロボットアーム63および末端のロボットアーム64は、回転可能なロボット部分61に、回動可能に配置され、そこでは末端のロボットアーム64は、ロボットハンド軸65を介して回転アトマイザー66を案内する。
【0119】
同様に、基部に近いロボットアーム67および末端のロボットアーム68は、回転可能なロボット部分62に、回動可能に配置され、そこでは末端のロボットアーム68は、同様にロボットハンド軸69を介して回転アトマイザー70を案内する。
【0120】
塗装設備70は末端のロボットアーム68に配置され、閉じた状態で示された末端のロボットアーム64も同様であることも述べておくべきである。
【0121】
図19は、図18の塗装ロボットの変形を示し、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0122】
この実施例の1つの特別の特徴は、末端のロボットアーム68が、回転アトマイザーでなく、むしろ車両本体のフードを開閉するためのグリップ72を案内することにある。この実施例においては、従って、塗装ロボットは、塗料の塗布だけでなくハンドリング・ロボットとして、そして特にフード・オープナとしても機能する。
【0123】
この実施例に関しては、基部に近いロボットアーム67は、ロボット部分62を間に入れることなく、ロボット・ベース60に直接回動可能に関節でつながれていることも述べておくべきである。
【0124】
本発明は、上述した好ましい実施例に限定されない。それに代えて、多数の変形および修正が発明のコンセプトを利用して同様に可能であり、したがってそれらは保護の範囲内にある。
【0125】
本発明は、また、参照される独立クレームの特徴なしに、または独立クレームのある特徴のみと共に、添付の従属クレームの主題の保護をも請求するものであることは注意すべきである。
【符号の説明】
【0126】
1 塗装ブース
2 車両本体
3 搬送方向
4 ブースの壁
5 ブースの壁
6 塗装ロボット
7 塗装ロボット
8 制御キャビネット
9 制御キャビネット
10 操作者
11 プログラム装置
12 ロボット・ベース
13 回転可能なロボット部分
14 基部に近いロボットアーム
15 末端のロボットアーム
16 ロボットハンド軸
17 回転アトマイザー
18 エルボ継手
19 インターフェイス
20 インターフェイス
21 供給ホース
22 旋回軸
23 ロボット制御装置
24 ロボット制御装置
25 引き出し
26 ハンドリング・ロボット
27 スタブ(短い)レール
28 移動レール
29 移動レール
30 ハンドリング・グリップ
31 フード
32 塗装ロボット
33 ロボット・ベース
34 基部に近いロボットアーム
35 末端のロボットアーム
36 アトマイザー
37 支柱
38 移動レール
39 移動レール
40 塗装ブース
41 コンベヤ
42 車両本体
43 支柱
44 支柱
45 支柱
46 支柱
47 移動レール
48 塗装ロボット
49 塗装ロボット
50 移動レール
51 塗装ロボット
52 塗装ロボット
53 長手方向の支柱
54 長手方向の支柱
55 ブースの壁
56 操作者
57 凹み
58 凹み
59 キャリア
60 ロボット・ベース
61 ロボット部分
62 ロボット部分
63 基部に近いロボットアーム
64 末端のロボットアーム
65 ロボットハンド軸
66 回転アトマイザー
67 基部に近いロボットアーム
68 末端のロボットアーム
69 ロボットハンド軸
70 回転アトマイザー
71 塗装設備
72 グリップ
【技術分野】
【0001】
本発明は構成部品を塗装するための、特に車両本体またはその部分を塗装するための、塗装装置に関する。さらにまた、本発明は塗装装置を製造し、試験しおよび/または据え付けるための、関連する方法に関する。
【背景技術】
【0002】
車両本体を塗装するための現代の塗装施設においては、塗布装置、例えば回転アトマイザー、を備える多軸塗装ロボットが使用される。この場合、塗装ロボットは、通常塗装ブースの外側に配置された制御キャビネット内の、塗装設備の据え付けの際に塗装ロボットに接続される、ロボット制御装置によって、作動する。さらにまた、塗装ロボットの運転のために必要な媒体、例えば圧縮空気、塗料、洗浄剤、のための各種の供給ラインも、塗装ロボットの据え付けの際に、接続されなければならない。後述するように、これらの従来の塗装施設には、種々の不利な点がある。
【0003】
一つは、最終的な据え付けの際の塗装ロボットの接続には、相当な労務費用を必要とし、そのことが据え付け費用を増加させる。さらに、ある程度の据付け時間も必要とされ、既存の塗装施設を改装する場合には、相応する塗装施設の改修時間および休止時間が増え、それは生産損失に至りうる場合がある。
【0004】
また別に、ロボット制御装置に対する接続あるいは供給ラインの接続のミスが、塗装ロボットの最終的な据え付けの際生じかねないので、塗装ロボットは、最終的な据え付けの後複雑な機能試験を受けなければならない。塗装施設の改修時間およびそれに相当する休止時間は、試験のために必要とされる時間により延長される。
【0005】
さらに、従来の技術に関しては、特許文献1、特許文献2、特許文献3、特許文献4および特許文献5が参照される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】独国実用新案第9212718号明細書
【特許文献2】独国特許第2915603号明細書
【特許文献3】独国特許第69102353号明細書
【特許文献4】独国特許出願公開第4430234号明細書
【特許文献5】独国特許第69629246号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、従って、最適に改良された塗装装置および関連する方法を提供することである。
【0008】
一方では、顧客の施設で塗装ロボットの最終的な据え付けのために必要な導入時間を減らすことが望ましく、それは、対応して塗装施設の休止時間を短縮することになる。
【0009】
他方では、本発明は、塗装施設の塗装ロボットの最終的な据え付けの際の、据え付け誤りを避けるために可能な個所に向けられている。
【課題を解決するための手段】
【0010】
この目的は、独立請求項による、本発明の塗装装置により、そして対応する方法により達成される。
【0011】
本発明は、ロボット制御装置および機械的支柱を含む、完成したモジュールとして予め組み立てられた形の塗装ロボットを供給するという、一般の技術的な教示からなり、予め組み立てられたモジュールは、それゆえ、長い据付け時間を必要とすることなく、顧客の敷地の塗装施設に容易に据え付けることができる。
【0012】
本発明の塗装装置には、多軸塗装ロボットが備えられていることが好ましい。このような塗装ロボットは、それ自体は従来の技術として説明されており、したがってより詳細を説明する必要はない。従って、本発明の塗装ロボットは、多軸ロボットハンド軸を有し、5、6、7または8つの可動軸を備えることが好ましいことのみ、簡単に述べられねばならない。好ましい実施例においては、従って、本発明の説明において、使用する「塗装ロボット」という用語は、車両本体を塗装するために同様に使用される従来の天井据え付け機や側面据え付け機とは区別されなければならない。
【0013】
塗装ロボットは、塗布装置として回転アトマイザーを案内するのが好ましいが、本発明の環境においては他の形式のアトマイザー、例えば混合気装置、空気レス装置、空気アトマイザーまたは超音波噴アトマイザーであってもよい。
【0014】
好ましくは、本発明は、例えば液体塗装または粉体塗装のような、塗料を塗布することに適している。各種の形式の塗料を、例えばプライマー、下塗りまたはクリアコートを塗布できる。しかしながら、本発明は、一例として上述した塗料の形式に限定されず、むしろ、他の形式の塗料でも原則として実施できる。
【0015】
さらにまた、本発明の塗装装置は、従来の、塗装ロボットに接続され所定のプログラムに従い制御するロボット制御装置を備える。
【0016】
ロボット制御装置は制御キャビネットに収容されるが、このこと自体は従来技術から知られている。
【0017】
本発明は、制御キャビネットが塗装ロボットのための支柱を構成すること、あるいは塗装ロボットのための支柱が制御キャビネットを構成して、ロボット制御装置を収容することを提供する。本発明の内容によれば、従って、制御キャビネットは、二重の機能を有する。制御キャビネットは、一方ではロボット制御装置を収容し、他方では塗装ロボットのための機械的支持構成要素としての役目をするからである。制御キャビネットのこの二重の機能により、ロボット制御装置および制御キャビネットを備えた塗装ロボットを事前に組立てておくことができるので都合がよく、予め組み立てられたモジュールは、それゆえ顧客の敷地の塗装施設に、容易にかつ迅速に据え付けることができる。本発明の内容によれば、従って、制御キャビネットは、塗装ロボットのための機械的支持機能を果たすことができるように、従来の制御キャビネットと比べて変更されている。
【0018】
本発明の1つの実施例において、塗装ロボットは一以上の制御キャビネットによって、のみ機械的に支えられ、制御キャビネット各々は支柱として構成される。しかしながら、支柱として構成される制御キャビネットは、他の支持構成要素と並んで単に機械的支持を提供する1つの構成要素であり、制御キャビネットは機械的に塗装ロボットを支持するのを単に補助するだけであることも、変形例として可能である。
【0019】
制御キャビネットの形状に関して、本発明は、特定の形状、例えば従来のキャビネットのそれに限定されないことも述べておかなければならない。それに代えて、制御キャビネットは、また、他の形状、例えばブラケット状またはボックス状を有してもよい。
【0020】
本発明で、ロボット制御装置および制御キャビネットを備えた塗装ロボットは支柱として事前に組立できることはすでに上述した。このようなモジュラプリアセンブリの場合、制御キャビネットは、塗装ロボットの運転のために必要な、すべての流体および電気的な供給ラインが接続できるインターフェイスを有することが好ましい。これは、塗装ロボットの運転のために単一のインターフェイスのみが接続されねばならないので、結果として、最終的な据付け時間が減るので有利である。塗装ロボットの運転のために必要な供給ラインは、この場合制御キャビネットのインターフェイスから塗装ロボットへ予め組み立てられたモジュール内で案内されるので、最終的な据え付けの際に、予め組み立てられたモジュールの範囲内で必要とされる、更なる据え付け作業はない。
【0021】
しかしながら、本発明は、支柱として構成されるロボット制御装置および制御キャビネットを有する塗装ロボットが、予め組み立てられたモジュールとして供給される上述の変形例に限定されない。その代わりに、本発明においては、塗装ロボットが、ロボット制御装置および制御キャビネットとは別々に運ばれ、そして据え付けられ、顧客の敷地内でロボット制御装置に接続されることも可能である。この変形例において、塗装ロボットは、塗装ロボットが支柱として構成される制御キャビネットに着脱可能に接続できるインターフェイスを備えるのが好ましい。塗装ロボットと制御キャビネットとの間のこのインターフェイスは、塗装ロボットと支柱として構成される制御キャビネットとの間の機械的接続のためにも機能するのが好ましい。塗装ロボットと支柱として構成される制御キャビネットとの間のインターフェイスは、従って、制御キャビネットと塗装ロボットとの間に、塗装ロボットの運転のために必要なすべての流体供給ライン(例えば塗料、洗浄剤および圧縮空気のためのライン)および電気的な供給ライン(例えば制御ラインおよびセンサ・ライン)を収容していることが好ましい。
【0022】
上述の2つの変形例(予め組み立てられたモジュールおよび予め組み立てられていないモジュール)においては、それぞれのインターフェイスは、例えば回転アトマイザーの圧縮空気タービンを駆動するための、塗装ロボットに圧縮空気を供給するために必要な空気圧系を備えることが好ましい。さらにまた、インターフェイスは、塗布される塗料を供給するための少なくとも一つの塗料ラインを備えることが好ましい。本発明は、好ましくは洗浄剤ラインを備え、それを介して色替えの際に洗浄剤を、塗装ロボットと特に回転アトマイザーを、洗浄するために供給できる。同じ理由から、インターフェイスは、塗装ロボットからの洗浄剤および/または塗料の帰還ための、もどり管路を備える事も好ましい。さらにまた、インターフェイスは、ロボット制御装置によるロボットの運転のための、電気的な制御ラインおよび/または塗装ロボットからロボット制御装置へセンサ計量値を通知するための少なくとも1本のセンサ・ラインを収容していることも好ましい。
【0023】
塗装ロボットは、例えば多軸のロボットハンド軸(5、6、7または8可動軸)を含む、多軸塗装ロボットであるのが好ましいことはすでに前に述べた。塗装ロボットは、移動可能であるかまたは固定して取り付けられたロボット・ベース、回転可能なロボット部分、回動可能な基部に近いロボットアーム(「アーム1」)および回動可能な末端のロボットアーム(「アーム2」)を備えるのが好ましい。
【0024】
本発明の実施例において、回転可能なロボット部分は、ロボット・ベースに対し実質的に垂直回転軸について回転可能であり、回転可能なロボット部分は、ロボット・ベースの下に配置されるのが好ましい。回転可能なロボット部分の回転軸に関して、本発明は厳密な垂直回転軸に限定されない。それに代えて、回転軸はわずかに曲がっていてもよい。この実施例の唯一の重要なことは、回転可能なロボット部分の回転軸は、実質的に垂直なことである。この実施例において、基部に近いロボットアームは、実質的に水平な旋回軸について回動可能であることが好ましく、これは同様に、基部に近いロボットアームに対して水平旋回軸について回動可能であることが好ましい末端のロボットアームにも当てはまる。
【0025】
本発明の別の実施例において、回転可能なロボット部分は、対照的にロボット・ベースに対し実質的に水平な回転軸について回転可能である。この実施例においては、対照的に基部に近いロボットアームの、そして末端のロボットアームの旋回軸は回転可能なロボット部分の回転軸に直角であり、特に塗装施設の構成部品の搬送方向に対して直角であることが好ましい。この実施例は、例えば、バンパーを塗装するのに適している。
【0026】
回転可能なロボット部分の異なる回転軸による上記の両実施例において、回転可能なロボット部分は、選択的に、ロボット・ベースの下に、ロボット・ベースより上に、またはロボット・ベースの脇に配置されうる。しかしながら、回転可能なロボット部分がロボット・ベースの下に配置される場合は特に有利である。その場合、塗装ロボットが、特に車両本体の内部を塗装することに適しているからである。
【0027】
さらにまた、本発明は、塗装ロボット内に供給ホースの特別な案内を備えており、当該供給ホースは塗装ロボットの運転のために必要である。例えば、塗装ロボットにおいて、塗装ロボットの運転のために必要な媒体(例えば圧縮空気、塗料および洗浄剤)は、ロボット・ベースから末端のロボットアームまで、続いてロボットハンド軸を通ってアトマイザーまで輸送されなければならず、通常これらのために、ロボット動作に従って変形する柔軟性のある供給ホースが備えられる。好ましくは、これらの供給ホースは、いずれの場合においても、隣接するロボット各部間の個々の継手内の、いわゆる中性繊維(neutral fiber)を通して案内される。中性繊維は、継手を通る想像線であって、継手の回転に際し長さ方向の張力あるいは圧縮の応力を受けず、曲げ負荷だけを受ける。供給ホースは、軸方向の機械的応力にさらされないために、継手の中性繊維の供給ホースの設置は利点がある。
【0028】
さらにまた、供給ホースはいずれの場合も継手の回転軸を通り抜けるので、同様に供給ホースに対する機械的応力を減らすこととなるのは好ましい。
【0029】
さらに、塗装ロボットの個々の供給ホースは、各場合において、回転可能なロボット部分から末端のロボットアームまでのホース平面にあるのが好ましく、それによりロボットアームの軸周りの旋回の際、供給ホースはホース平面においてだけ曲げられる。ホース平面は、したがって、ロボットアームの回転軸に直角であることが好ましい。この技術的な手段は、また、ロボット位置の変更の際、供給ホースに対する機械的応力を減らして、したがって供給ホースの寿命を延長する。
【0030】
さらにまた、本発明の塗装ロボットは、例えば所望の色を選択するための色チェンジャーのような、塗装設備を備えることが好ましく、色チェンジャーは、入力側が複数の色フィードラインに、そして出力側がアトマイザーに接続される。塗装ロボットに、またはその中に取り付けられる塗装設備は、例えば、計量シリンダ、プランジャポンプ、ラジアルネジ(Radialschrauben)のような、計量ポンプまたは他の計量システムを備えてもよい。塗装ロボットに、またはその中に取り付けられる塗装設備は、計量ポンプまたは他の塗装設備を駆動するためのモータを備えてもよい。塗装ロボットに、またはその中に取り付けられる塗装設備は、塗布圧を調整するための塗料圧力調整器および/または静電塗装のために必要な高電圧を発生させるための高電圧発生器を備えてもよい。
【0031】
上述した塗装設備は、基部に近いロボットアームに、またはその中に配置されることができる。代わりに、本発明においては、塗装設備を、末端のロボットアームに、またはその中に配置することも可能である。塗装設備は、異なるロボットアームに分散するように配置される。あまり使用されない塗料(「ロー・ランナ(Low Runner)」)のための塗装設備は、基部に近いロボットアーム(「アーム1」)に、またはその中に位置し、よく使用される塗料のための塗装設備は末端のロボットアーム(「アーム2」)に、またはその中に位置するのが好ましく、そうすればよく使用される塗料(「ハイ・ランナ(High Runner)」)の色替え損失を最も低くすることができる。
【0032】
本発明の好ましい実施例においては、末端のロボットアームは、いわゆるエルボ継手を介して基部に近いロボットアームに回動可能に接続され、エルボ継手は、少なくとも一のロボット位置において、下方へ案内される(「エルボ・ダウン」)。
【0033】
この場合、ロボット・ベースは、アトマイザーがロボット・ベースの下に位置するように、塗装される車両本体より上に配置されるのが好ましい。余分なコーティング剤残留物(「オーバースプレー」)は、塗装ブース内の下方向への気流によって、下方へ押し出され、したがって、高い位置にある塗装ロボットにはより少なく蓄積するので、塗装ロボットのこの高い配置は、とりわけ有利である。塗装ロボットの高い配置は、このように塗装ロボットの汚れ易さを少なくするので都合がよい。
【0034】
一つのロボット位置にある末端のロボットアームが実質的に水平に動作して、内部を塗装するために車両本体の内部に水平方向に案内されうるとき、このロボット位置(「エルボ・ダウン」)は車両本体の内部塗装を容易にする。
【0035】
「エルボ・ダウン」のロボット位置において、末端のロボットアーム(「アーム2」)の機構は、「エルボ・アップ」のロボット位置より大きくできる。これは、より多くの塗装設備を末端のロボットアームに設置することができ、その結果、塗料および溶媒の消費が減らされることを意味する。
【0036】
さらにまた、本発明の塗装ロボットは、基部に近いロボットアームと末端のロボットアームとの間のエルボ継手を上方へ案内するロボット位置(「エルボ・アップ」)を取ることもできることが好ましい。
【0037】
本発明の塗装装置は、塗装装置を通して塗装される構成部品を搬送するコンベヤも備えることが好ましいが、これ自体は、従来技術から知られており、したがってより詳細に説明する必要はない。ロボット・ベースは、この場合コンベヤに対し上方向に、特に塗装される構成部品の上側より上の高さに、オフセットされるのが好ましい。塗装ロボットのこの高い配置は、すでに上述したように、塗装ロボットの汚れ易さを低くする。塗装ブース中を上から下へ通る直線の流れは、構成部品に付着していない塗料の粒子(「オーバースプレー」)を押し下げるからである。
【0038】
本発明の1つの変形例では、ロボット・ベースが動かないように、ロボット・ベースは固定して取り付けられる。このため、ロボット・ベースは、支柱を構成している制御キャビネットに直接取り付けられてもよい。
【0039】
しかしながら、変形例として、塗装ロボットと共にロボット・ベースが移動レールを移動できるようにすることも可能である、これ自体は、従来技術から知られており、したがってより詳細に説明する必要はない。塗装ロボット、ロボット制御装置および支柱として構成される制御キャビネットから成る上述のモジュールのプリアセンブリ(事前組立体)の場合、その予め組み立てられたモジュールが移動レールを含むのも好ましい。
【0040】
本発明の1つの実施例においては、塗装装置は、さらに塗装される車両本体のフードあるいはドアを開閉することのできるハンドリング・ロボットを有するので、実際の塗装ロボットは、車両本体内部の塗装を実施できる。ハンドリング・ロボットは、この場合移動レールに取り付けることができ、その場合、移動レールは、支柱として構成される制御キャビネットに同様に取り付けられるのが好ましい。上述した予め組み立てられたモジュール構造の場合、予め組み立てられたモジュールは、したがって、ハンドリング・ロボット用の移動レールおよび/またはハンドリング・ロボットを備えることもできる。
【0041】
本発明において、ハンドリング・ロボット用の移動レールは、支柱として構成される制御キャビネットにより、機械的に支えられてもよい。しかしながら、ハンドリング・ロボット用の移動レールは、追加的にさらに機械的支持構造物によって支えられることも可能である。
【0042】
さらに、ハンドリング・ロボット用の移動レールは、塗装ロボットも固定して取り付けられているその同じ支柱に取り付けられることが可能である。
【0043】
塗装ロボットは支柱のハンドリング・ロボットより上に取り付けられるのが好ましく、それは運転を容易にすることも述べておくべきである。
【0044】
ハンドリング・ロボット用の移動レールは、いわゆるスタブ(短い)レールとして構成されてもよいことも述べておくべきである。これは、ハンドリング・ロボット用の移動レールは塗装ブースより短いことを意味する。
【0045】
さらにまた、ハンドリング・ロボット用の移動レールは、構成部品の搬送方向に、塗装ロボットに対してオフセットされて配置されると都合がよいかもしれない。これは、塗装される構成部品が、高速の搬送速度で塗装ブースを通って搬送される場合、特に有利である。搬送方向へのハンドリング・ロボット用のハンドリング・レールのオフセットは、その場合ハンドリング・ロボットにより多くの時間を与えることになるからである。
【0046】
塗装ロボットは、塗装ブース内に配置されるのが好ましく、塗装ブースは平らなブース壁(「クリーンな壁」)を備えるのが好ましいことはすでに上述した。
【0047】
さらにまた、塗装ブースのブース壁は、外側から塗装運転を視覚的に監視できるよう、少なくとも部分的に透明であるか、または少なくとも一つの視界窓を有するのが好ましい。
【0048】
この点について、支柱として構成される制御キャビネットは、塗装ブースの外側に配置されるのが好ましいことも述べておくべきである。これは、制御キャビネットに収容されるロボット制御装置の保守作業を遂行するために、塗装ブースに入る必要はないという利点を提供する。
【0049】
本発明の1つの変形では、塗装ロボットは、アトマイザーに加えて、塗装される車両本体のドアまたはフードを開くためのハンドリング・グリップを備える。塗装ロボットは選択的に塗料を塗布するかまたはハンドリング・ロボットとして働くことができるので、塗装ロボットは、従って、この実施例においては二つの機能をもつ。
【0050】
本発明の更なる実施例では、制御キャビネットを構成する支柱は、固定して配置されず、むしろ移動可能である。一例として、支柱は一以上の移動レールを移動可能でありえ、その場合、支柱のための移動レールは、塗装される車両本体の搬送方向に平行に配向されるのが好ましい。支柱は垂直に配向されるのが好ましく、その場合、塗装ロボットは垂直方向の支持支柱に沿って移動可能である。
【0051】
本発明の1つの変形例では、塗装ロボットは、移動レールに沿って移動可能であり、この場合、移動レールは、移動レールが塗装ラインに沿うように、塗装される構成部品の搬送方向に配向されるのが好ましい。塗装ロボットは、この場合実質的に垂直方向のキャリアにより移動レールに接続され、キャリアは、その上側が移動レールに案内され移動レールに沿って移動できると共に、その下側に塗装ロボットのロボット・ベースを乗せる。この場合、従って、キャリアは、塗装ロボットが高い位置の移動レールに沿って移動可能にもかかわらず、塗装ロボットのロボット・ベースは塗装ブースのより低い領域に位置することを確実にする。移動レールと塗装ロボットとの間のキャリアは、したがって、移動レールに対して塗装ロボットが低く位置することを可能とする。
【0052】
さらに、本発明は、塗装装置を通って所定の搬送方向に塗装される構成部品を搬送するコンベヤが塗装ブースに設けられる変形例を含むが、このようなコンベヤ自体は従来技術に属し、したがってより詳細に説明する必要はない。塗装ロボットは、この場合同様に移動レールに移動可能に設けられるが、1つの特別な特徴は、移動レールが塗装される構成部品の搬送方向を横切って配置されることである。この変形例では、従って、塗装ロボットのための移動レールは塗装される構成部品の搬送方向に直角にわたるのが好ましく、この結果、非常に短いブース長を有する塗装ブースを設置することが可能である。
【0053】
塗装ロボットのために横断方向の移動レールを有する変形例において、移動レール上の塗装ロボットのための動作クリアランス(間隙)は通常は塗装ブースの側面のブース壁によって制限をうける。横断方向にわたる走行移動レールの塗装ロボットの動作クリアランスを延長するために、従って、本発明の1つの変形例では、ブース壁が横断方向にわたる移動レールの延長部分に側面の凹みを有するので、移動レールの塗装ロボットは塗装ブースの凹みに移動して入ることができるようになっている。本発明のこの変形例では、塗装ブースのブース幅は、従って、一定でなく、ブースの長さに亘りむしろ異なり、塗装ロボットのための移動レールの脇のブース幅は、塗装ロボットのための移動レールの搬送方向の前後より大きい。
【0054】
本発明は、少なくとも2つのロボットアームまたは他のそのようなロボット部分が可動に関節でつながれたロボット・ベースを備えた、新規な塗装ロボットをも含む。本発明の1つの変形では、2本のロボットアームは、各々アトマイザーを案内する。対照的に、本発明の別の変形例では、1つのロボットアームはアトマイザーを案内し、別のロボットアームがハンドリング工具、特に、車両本体のフードまたはドアを開閉するためのグリッパー(把持具)を案内するようになっている。
【0055】
さらに、本発明は、本発明の塗装装置を製造、試験および/または据え付けるための方法をも含む。本発明の方法は、それが塗装ロボットを機械的に支持できるように、制御キャビネットは製造の際、機械的に補強される事を特徴とする。
【0056】
本発明の製造方法は、また、塗装ロボットは、支柱として構成される制御キャビネットに対し、直接にまたは移動レールまたは取付けアダプタの手段により取り付けられることを特徴とする。
【0057】
本発明の方法において、塗装ロボット、制御キャビネット、ロボット制御装置および/または移動レールを備えたモジュールのプリアセンブリ(事前組立)が最初に行われるのが好ましく、このプリアセンブリは、顧客の敷地ではなく製造業者の敷地で行われる。
【0058】
モジュールのこのプリアセンブリでは、予め組み立てられたモジュールを試験できるのが好ましく、試験は、同様に製造業者の敷地で行われる。この試験の際、最初にアトマイザーの流体機能を試験できる。従って、アトマイザーが正しく作動するかどうか試験することが可能である。さらに、予め組み立てられたモジュールの試験は、塗装ロボットの正しい動作能力を試験することをも含むことができる。予め組み立てられたモジュールの試験の際、コーティング剤の静電帯電が正しく機能しているかどうか試験する事も可能である。最後に、予め組み立てられたモジュールの試験の際、塗装ロボットがその移動レール上で正しく移動できるかどうか試験することも可能である。
【0059】
本発明の方法は、続いて、予め組み立てられたモジュールを顧客の敷地の据え付け現場へ輸送することをも備えるのが好ましい。
【0060】
さらにまた、本発明の方法は、続いて 据え付けの現場での予め組み立てられたおよび/または試験されたモジュールの最終的な据え付けをも含むのが好ましく、モジュールはそこで機械的に固定され、塗装ロボットの、そして関連するアトマイザーの運転のために必要なすべてのラインに接続される。更なる試験は、その時しかしながら、通常は必要でなく、その結果、最終的な据付け時間はかなり減らされる。
【0061】
本発明の塗装ロボットは、その構成(「エルボ・ダウン」)のため車両本体の内部を塗装するのに非常に適している事は、すでに上述した。本発明の方法は、従って、車両本体の内部を塗装することをも含み、その際塗装ロボットは、基部に近いロボットアームと末端のロボットアームとの間のエルボ継手が下方へ案内されるように、位置を定められる。アトマイザーを備えた末端のロボットアームは、それから、その末端のロボットアームが塗装される車両本体の側に、続いて塗装される構成部品の搬送方向に対し直角に、その位置を定められる。アトマイザーを備えた末端のロボットアームは、その時実質的に水平に配向され、塗装される車両本体の内部に、その内部を塗装するために、水平方向に案内される。
【0062】
本発明の他の有利な更なる展開は従属クレームに特徴付けられるか、または図を参照して本発明の好ましい実施例の記載と共に、以下に更に詳細に説明される。
【図面の簡単な説明】
【0063】
【図1】固定して設置される2台の塗装ロボットを有する塗装ブースの斜視図を示す。
【図2A】図1の塗装ロボットの異なる斜視図を示す。
【図2B】図1の塗装ロボットの異なる斜視図を示す。
【図2C】図1の塗装ロボットの異なる斜視図を示す。
【図2D】図1の塗装ロボットの異なる斜視図を示す。
【図2E】図1の塗装ロボットの異なる斜視図を示す。
【図2F】図1の塗装ロボットの異なる斜視図を示す。
【図3】図1に示される塗装ブースから見た、支柱として構成される制御キャビネットの斜視図を示す。
【図4】固定して設置された塗装ロボットと、塗装ロボットの下のスタブ・レール上を移動可能なドア・オープナとを有する、塗装ブースの斜視図を示す。
【図5】図4の塗装ブースの平面図を示す。
【図6】図4および5の塗装ブースの斜視図を示す。
【図7】2台の塗装ロボットが位置を変えることができ、また2台のハンドリング・ロボットも移動可能な、移動レールを有する塗装ブースの斜視図を示す。
【図8】移動可能な塗装ロボットおよび同様に移動可能なハンドリング・ロボットを有する、本発明の塗装ブースの正面図を示す。
【図9】それぞれ2つの塗装ロボットおよび2つハンドリング・ロボット用の2つの移動レールを有する塗装ブースの斜視図を示す。
【図10】ハンドリング・ロボットとして代わりに使用できる、2台の塗装ロボットの斜視図を示す。
【図11】固定して設置される2台の塗装ロボットを有する、塗装ブースの斜視図を示す。
【図12】塗装ロボットは制御キャビネットを構成する移動可能な支柱に設置されている、移動可能な塗装ロボットの斜視図を示す。
【図13】それぞれ2台の塗装ロボットのための2本の移動レールを有し、当該移動レールは車両本体の搬送方向に対し直角な、本発明の塗装ブースの斜視図を示す。
【図14】図13の塗装ブースの平面図を示す。
【図15】車両本体の搬送方向に平行な、図13および図14の塗装ブースの斜視図を示す。
【図16】上部にある移動レールを有し、塗装ロボットは当該移動レールに移動可能で、当該移動レールに対して下方にある、本発明の塗装ブースの実施態様の変形実施例の斜視図を示す。
【図17】車両本体の搬送方向に平行な、図17の塗装ブースの斜視図を示す。
【図18】ロボットアームが可動に関節でつながれるロボット・ベースを備えた、本発明の塗装ロボットの実施例の図を示す。
【図19】運動学的に平行に配置された複数のロボットアームを有する塗装ロボットの変形実施例の斜視図を示す。
【発明を実施するための形態】
【0064】
図1の斜視図は、車両本体2を塗装するための塗装施設に配置される、本発明の塗装ブース1を示し、ここで車両本体2は、矢印により示される方向に、搬送装置3により塗装ブース1を通って搬送される。
【0065】
更に、車両本体2に他のコーティング剤を塗布するための塗装ブースを、塗装ブース1の前後の搬送方向に配置できる。一例として、塗装ブース1で下塗り層を車両本体2に塗布してもよい。そしてプライマーは前もって先行する塗装ブース(図示せず)で車両本体2に塗布される。クリアコート層は、続けて、搬送方向の下流側に配置された塗装ブース(図示せず)で車両本体2に塗布される。
【0066】
塗装ブース1は、周囲全体に連続する平らなブースの壁4、5を有し、塗装ブース1の内部が見えるように、ブースの壁は部分的に示されてない。平らなブースの壁4、5は、汚れにくくまた容易に清掃できる利点がある。
【0067】
ブースの壁4、5はほとんど透明であって、そのため塗装ブース1の外側に位置する人が視覚的に塗装ブース1の内部で行われている塗装運転をモニタすることができることも述べておかねばならない。
【0068】
塗装ブースにおいて、2台の多軸塗装ロボット6、7は、支柱として構成される制御キャビネット8、9に固定して各々取り付けられる。
【0069】
ここで、2つの制御キャビネット8、9は、塗装ブース1の外側に位置し、ロボット塗装ロボット6、7を作動させる制御装置を収容している。保守は、従って、保守スタッフが塗装ブース1に入らずに、制御キャビネット8、9内のロボット制御装置で行うことができる。
【0070】
制御キャビネット8、9は、従来の制御キャビネットと比較して機械的に補強され、ロボット制御装置を収容することに加えて、塗装ロボット6、7のための機械的支持機能を果たすことができる。
【0071】
ここで、2台の塗装ロボット6、7と付随する制御キャビネット8、9およびその中のロボット制御装置は、塗装ロボットの製造者により予め組み立てられかつ試験された形で供給される、予め組み立てられたモジュールを構成し、したがってこれらのモジュールは最終的な据付けの際、顧客の敷地に設置するだけで良い。最終的な据え付けの際、従って、必要とされるのは、制御キャビネット8、9の機械的固定および運転のために必要なラインに対する制御キャビネット8、9の接続(例えば圧縮空気、塗料、水洗浄剤、電力、その他のための)が全てである。
【0072】
制御キャビネット8、9に位置するロボット制御装置は、携帯型プログラム装置11により、塗装ブース1の外側の操作者10によってプログラムされることができ、プログラム装置11は、ロボット制御装置から、そしてそれにデータを無線送信できる。
【0073】
図2A〜図2Fは、塗装ロボット6、7の構造を示す。
【0074】
塗装ロボット6、7は、実質的に、ロボット・ベース12、回転可能なロボット部分13、基部に近いロボットアーム14、末端のロボットアーム15、ロボットハンド軸16および回転アトマイザー17から成る。
【0075】
回転可能なロボット部分13は、この場合ロボット・ベース12の下に配置され、ロボット・ベース12に対し垂直回転軸について回転可能である。
【0076】
逆に、基部に近いロボットアーム14は、回転可能なロボット部分13に対し水平旋回軸について回動可能である。
【0077】
末端のロボットアーム15も同様であり、基部に近いロボットアーム14に対し水平な旋回軸について回動可能である。
【0078】
基部に近いロボットアーム14は、エルボ継手18によって末端のロボットアーム15に接続されることも述べておかねばならない。図2Aに示されるロボット位置において、エルボ継手18は、上方へ案内されている(「エルボ・アップ」)。図2Bに示されるロボット位置において、エルボ継手18は、逆に下方へ案内されている(「エルボ・ダウン」)。下方へ案内されたエルボ継手18を有する図2Bに示されるロボット位置は、車両本体2の内部を塗装するのに特に適している。末端のロボットアーム15が、塗装される車両本体2の横に容易に導入されうるからである。
【0079】
図2Cから、ロボット・ベース12は、塗装ロボット6の運転のために必要な供給管路を接続するためのインターフェイス19を有することもわかる。さらにまた、ロボット・ベース12は、塗装ロボット6を制御キャビネット8に取り付けるための機械的インターフェイス20も備える。
【0080】
図2Cから、例えば計量手段、色チェンジャーまたは高電圧カスケードのような塗装設備が、基部に近いロボットアーム14に取り付けられていることもわかる。
【0081】
図2Dの斜視図から、塗装設備は末端のロボットアーム15にも設置され、塗装ロボット6の運転のために必要とされる塗装設備が2つのロボットアーム14および15にわたり分配されていることがさらにわかる。
【0082】
図2D〜図2Fは、フレキシブルな供給ホースがロボット・ベース12と回転アトマイザー17との間にあり、例えば、塗布される塗料を供給することも示している。
【0083】
一方、回転可能なロボット部分と各場合の末端のロボットアーム15との間の供給ホース21は、ロボットアーム14、15の旋回軸に直角に配向したホース平面にあることを、ここで述べておくべきである。これは、供給ホース21は、ロボットアーム14、15の軸周りの旋回の間、ホース平面、すなわち一方向へのみの曲げ負荷にさらされるだけであることを意味する。
【0084】
他方、基部に近いロボットアーム14は、回転可能なロボット部分13に対し旋回軸22について回動可能であることを述べておくべきであり、そこでは、供給ホース21は、基部に近いロボットアーム14と回転可能なロボット部分13との間の継手の旋回軸22を通って案内される。供給ホース21は、基部に近いロボットアーム14の軸周りの旋回動作の間、比較的軽微な機械的応力のみがかかるという利点がある。
【0085】
同じ理由から、継手の供給ホース21は、いずれの場合でもいわゆる中立の繊維組織内に案内され、その中では、曲げ負荷だけで、軸方向の張力や圧縮の力は供給ホース21に生じない。
【0086】
図3は、制御キャビネット8の斜視図を示し、図1に示される制御キャビネット9は、構造的に同一である。
【0087】
制御キャビネット8は、上部領域と下部領域の両方にロボット制御装置23、24のためのスペースを有する。
【0088】
さらにまた、制御キャビネット8は、中央に、例えば予備部品、操作指示書あるいは雑巾も収容できる引き出し25を有する。
【0089】
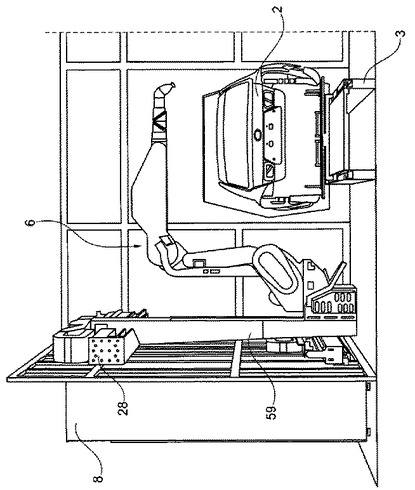
図4〜図6は、上述した塗装ブース1にほとんど対応する、本発明の塗装ブース1の実施態様の変形例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0090】
この実施例の1つの特別な特徴は、塗装ロボット6に加えて、塗装ロボット6による次の内部塗装のために、車両本体2のドアを開く作業を有するハンドリング・ロボット26が備えられていることにある。
【0091】
ハンドリング・ロボット26は、スタブ・レール27上の塗装ロボット6の下に取り付けられ、矢印により示される方向に移動可能である。
【0092】
ハンドリング・ロボット26用のスタブ・レール27は、塗装ロボット6に対し、搬送方向において、オフセットされるように配置されている。これには、一旦塗装ロボット6による内部塗装が終わっても、車両本体2がハンドリング・ロボット26の領域から矢印により示される方向に移動する前に、ハンドリング・ロボット26はなお、車両本体2のドアを閉めるのに十分な時間をもてるという利点がある。
【0093】
完璧を期すため、上述の塗装装置は、塗装ブースにおいて、車両本体2の両側に対称的に配置されることが指摘されなければならない。
【0094】
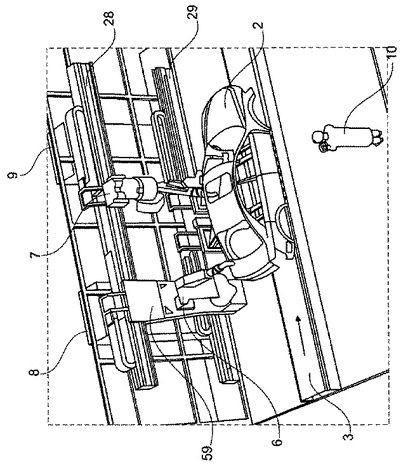
図7および図8は、上述した塗装ブース1にほとんど対応した、本発明の塗装ブース1のさらなる実施例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0095】
この実施例の1つの特別な特徴は、この実施例の塗装ロボット6、7は、固定して据え付けられてなく、むしろ共通の移動レール28上にあることである。
【0096】
さらにまた、この実施例のハンドリング・ロボット26は、移動レール28に懸架されている。
【0097】
図9は、上述した塗装ブース1にほとんど対応した、本発明の塗装ブース1他の実施例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0098】
この実施例の1つの特別な特徴は、更なる移動レール29が、支柱として構成される制御キャビネット8、9に、そのより低い領域に取り付けられていることである。この場合の移動レール29はハンドリング・ロボット26を支えるが、上部移動レール28は塗装ロボット6、7を支えている。
【0099】
図10は、回転アトマイザー17に加えて、ハンドリング・グリップ30を備える、変形された塗装ロボット6の斜視図を示し、これにより塗装ロボット6は車両本体2のフード31を開閉することができる。塗装ロボット6は、従って、この実施例において、2つの機能をもち、選択的に塗料を塗布するかまたはハンドリング・ロボットとして働くかすることができる。
【0100】
最後に図11は、上述した塗装ブース1にほとんど対応する、本発明の塗装ブース1の実施例を示しており、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0101】
この実施例の1つの特別な特徴は、ロボット・ベース12と回転可能なロボット部分13との間の回転軸は水平に配向され、搬送装置の移送方向3に平行であることにある。
【0102】
基部に近いロボットアーム14の、そして末端のロボットアームの旋回軸は、ここでは反対に搬送装置の移送方向3に直角に配向された平面にある。
【0103】
図12は、移動可能な塗装ロボット32を備えた本発明の塗装装置の更なる実施例を示し、ここでは、塗装ロボット32は、ロボット・ベース33、基部に近いロボットアーム34、末端のロボットアーム35および末端のロボットアーム35に案内されるアトマイザー36を備える。
【0104】
塗装ロボット32は、支持柱37上の垂直方向(Z方向)に移動可能である。ここで1つの特別な特徴は、支柱37は、塗装ロボット32を機械的に案内するために機能するだけでなく、むしろ塗装ロボット32のためのロボット制御装置および/または塗装設備も収容し、そこでは塗装ロボット32のための空気圧システムは、支持支柱37に一体化されることができることにある。この実施例において、従って、支持支柱37は、塗装ロボットのための制御キャビネットを構成する。
【0105】
支持支柱37はX方向に、すなわち塗装される車両本体の搬送方向において、1つが他方より上に位置する2本の平行移動レール38、39上において、移動可能である。
【0106】
図13および図15は、塗装施設において、配置できる本発明の塗装ブース40の更なる実施例を示し、さらなる塗装ステーションが、塗装ブース40の搬送方向の前後に設けられる。
【0107】
塗装ブース40を通っているのは、車両本体42が塗装ブース40を通して直線的に移送するコンベヤ41であり、これは、従来の技術からそれ自体は知られており、したがって詳細に説明するまでもない。
【0108】
塗装ブースの外側に位置するのは4つの支持支柱43、44、45、46であり、そこで入口側に配置される支持支柱43、46は、入力側に配置されて、コンベヤ41の搬送方向に直角な移動レール47を乗せている。2台の塗装ロボット48、49は、コンベヤ41の搬送方向に直角に、移動レール47に沿って位置を変えることができる。
【0109】
出口側に配置された2つの支持支柱44、45は、それらの上側に共同で、同様にコンベヤ41の搬送方向に直角に配向された更なる移動レール50を乗せている。2台の塗装ロボット51、52は、同様に移動レール50に移動可能に配置される。
【0110】
塗装ロボット48、49および51、52は、各々いわゆる逆運動力学(inverse Kinematik)を有する。これは、塗装ロボット48、49、51、52のロボット・ベースは、従来の塗装ロボットと比較すると逆さであり、塗装ロボット48、49、51、52のロボットアームがそれぞれのロボット・ベースの下に位置することを意味する。
【0111】
2つの移動レール47、50は、それらの端部で互いに各々長手方向の支柱53、54に接続されるので、長手方向の支柱53、54と2本の移動レール47、50は安定な骨組を構成する。
【0112】
塗装ブース40は、側面から、そして周辺のブースの壁55によりその端部側で区切られ、ブースの壁55は透明なため、塗装ブース40の外側にいる操作者56は、外側から塗装ブース40内部で行われている塗装工程を視覚的に監視できる。
【0113】
ブースの壁55は、いずれも側面から2本の移動レール47、50の延長方向に側面の凹み57、58を有するので、塗装ロボット48、49および51、52は、移動レール47、50上を、側面の方向に凹み57、58内に移動することができ、そのため側面の方向の塗装ロボット48、49、51、52の動作距離のゆとりが増すことも述べておくべきである。側面の凹み57、58間の塗装ブース40のブース幅は、凹み57、58の領域より小さいので、特に図14から見て取れるように、操作者56は、より至近距離から塗装ブースの内部で行われている塗装工程を監視することができる。
【0114】
図16および図17に示される実施例は、ほとんど図9に示される実施例に対応するので、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0115】
この実施例の1つの特別な特徴は、塗装ロボット6が上部移動レール28で移動可能場合であっても、塗装ロボット6は移動レール28に対して下方へオフセットされるように配置されていることにある。このため、移動レール28に沿ってその上側で移動可能な、実質的に垂直方向のキャリア59が使用され、キャリア59はその下側に塗装ロボット6のロボット・ベースを乗せている。キャリア59は、従って上部移動レール28に対して塗装ロボット6を下降させるのに役立つ。
【0116】
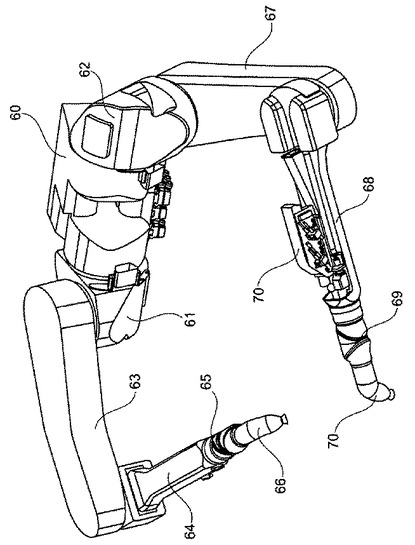
図18は、固定して配置されるかまたは移動レールで移動可能な、ロボット・ベース60を備えた塗装ロボットの斜視図を示す。
【0117】
2つのロボット部分61、62は、ロボット・ベース60の対向する側に、回転可能に取り付けられ、そこでは、2つのロボット部分61、62は、共通のロボット・ベース60に対して、共通の、水平な回転軸について回転することができる。
【0118】
基部に近いロボットアーム63および末端のロボットアーム64は、回転可能なロボット部分61に、回動可能に配置され、そこでは末端のロボットアーム64は、ロボットハンド軸65を介して回転アトマイザー66を案内する。
【0119】
同様に、基部に近いロボットアーム67および末端のロボットアーム68は、回転可能なロボット部分62に、回動可能に配置され、そこでは末端のロボットアーム68は、同様にロボットハンド軸69を介して回転アトマイザー70を案内する。
【0120】
塗装設備70は末端のロボットアーム68に配置され、閉じた状態で示された末端のロボットアーム64も同様であることも述べておくべきである。
【0121】
図19は、図18の塗装ロボットの変形を示し、そのため以下で反復を避けるために上述の記載が参照され、同じ参照は同じ詳細について使用されている。
【0122】
この実施例の1つの特別の特徴は、末端のロボットアーム68が、回転アトマイザーでなく、むしろ車両本体のフードを開閉するためのグリップ72を案内することにある。この実施例においては、従って、塗装ロボットは、塗料の塗布だけでなくハンドリング・ロボットとして、そして特にフード・オープナとしても機能する。
【0123】
この実施例に関しては、基部に近いロボットアーム67は、ロボット部分62を間に入れることなく、ロボット・ベース60に直接回動可能に関節でつながれていることも述べておくべきである。
【0124】
本発明は、上述した好ましい実施例に限定されない。それに代えて、多数の変形および修正が発明のコンセプトを利用して同様に可能であり、したがってそれらは保護の範囲内にある。
【0125】
本発明は、また、参照される独立クレームの特徴なしに、または独立クレームのある特徴のみと共に、添付の従属クレームの主題の保護をも請求するものであることは注意すべきである。
【符号の説明】
【0126】
1 塗装ブース
2 車両本体
3 搬送方向
4 ブースの壁
5 ブースの壁
6 塗装ロボット
7 塗装ロボット
8 制御キャビネット
9 制御キャビネット
10 操作者
11 プログラム装置
12 ロボット・ベース
13 回転可能なロボット部分
14 基部に近いロボットアーム
15 末端のロボットアーム
16 ロボットハンド軸
17 回転アトマイザー
18 エルボ継手
19 インターフェイス
20 インターフェイス
21 供給ホース
22 旋回軸
23 ロボット制御装置
24 ロボット制御装置
25 引き出し
26 ハンドリング・ロボット
27 スタブ(短い)レール
28 移動レール
29 移動レール
30 ハンドリング・グリップ
31 フード
32 塗装ロボット
33 ロボット・ベース
34 基部に近いロボットアーム
35 末端のロボットアーム
36 アトマイザー
37 支柱
38 移動レール
39 移動レール
40 塗装ブース
41 コンベヤ
42 車両本体
43 支柱
44 支柱
45 支柱
46 支柱
47 移動レール
48 塗装ロボット
49 塗装ロボット
50 移動レール
51 塗装ロボット
52 塗装ロボット
53 長手方向の支柱
54 長手方向の支柱
55 ブースの壁
56 操作者
57 凹み
58 凹み
59 キャリア
60 ロボット・ベース
61 ロボット部分
62 ロボット部分
63 基部に近いロボットアーム
64 末端のロボットアーム
65 ロボットハンド軸
66 回転アトマイザー
67 基部に近いロボットアーム
68 末端のロボットアーム
69 ロボットハンド軸
70 回転アトマイザー
71 塗装設備
72 グリップ
【特許請求の範囲】
【請求項1】
a)アトマイザーの位置を定める多軸塗装ロボット(6、7)と、
b)当該塗装ロボット(6、7)を制御するためのロボット制御装置(23、24)と、
c)当該ロボット制御装置(23、24)を収容する制御キャビネット(8、9)と
からなる構成部品(2)を塗装するための、特に車両本体またはその部分を塗装するための塗装装置(1)において
d)当該制御キャビネット(8、9)は、機械的に当該塗装ロボット(6、7)を支持する支柱を構成する
ことを特徴とする塗装装置。
【請求項2】
a)前記塗装ロボット(6、7)および前記制御キャビネット(8、9)と前記塗装装置(1)とは、予め組み立てられたモジュールを構成すること、
b)前記制御キャビネット(8、9)はインターフェイスを有し、それを介して前記塗装ロボット(6、7)の運転のために必要なすべての流体および電気的な供給ラインを接続できること、
c)当該供給ラインは、前記制御キャビネットの当該インターフェイスから前記塗装ロボット(6、7)まで、当該予め組み立てられたモジュール内で案内される
ことを特徴とする請求項1または2に記載の塗装装置。
【請求項3】
a)前記塗装ロボット(6、7)は、前記インターフェイス(19、20)により、前記制御キャビネット(8、9)に、着脱可能に接続されること、
b)前記塗装ロボット(6、7)は、前記インターフェイス(19、20)により、支柱に機械的に取り付けられること、
c)前記インターフェイス(19、20)は、前記塗装ロボット(6、7)の運転のために必要な、前記制御キャビネット(8、9)と前記塗装ロボット(6、7)との間のすべての流体および電気的な供給ラインを収容していること
を特徴とする請求項1乃至3のいずれか1項に記載の塗装装置。
【請求項4】
前記インターフェイスには、供給ライン(21)として
a)前記塗装ロボット(6、7)に圧縮空気を供給するための少なくとも一つの空気圧系ライン、および/または
b)前記塗装ロボット(6、7)に塗布される塗料を供給するための少なくとも一つの塗料ライン、および/または
c)前記塗装ロボット(6、7)に洗浄剤を供給するための洗浄剤ライン、および/または
d)前記塗装ロボット(6、7)からの当該洗浄剤および/または当該塗料の帰還のためのもどり管路、および/または
e)前記ロボット制御装置(23、24)によるロボットの駆動のための電気的な制御ライン、および/または
f)前記塗装ロボット(6、7)から前記ロボット制御装置(23、24)へセンサ計量値を伝達するための少なくとも一つのセンサ・ライン
が備えられていることを特徴とする請求項2または3に記載の塗装装置。
【請求項5】
a)前記塗装ロボット(6、7)は、ロボット・ベース(12)、回転可能なロボット部分(13)、回動可能な基部に近いロボットアーム(14)および回動可能な末端のロボットアーム(15)を備えること、
b)当該回転可能なロボット部分(13)は、当該ロボット・ベース(12)に対し、実質的に垂直な回転軸について回転可能であること、
c)当該基部に近いロボットアーム(14)は、当該回転可能なロボット部分(13)対して、特に実質的に水平旋回軸について、回動可能であること、
d)当該末端のロボットアーム(15)は、当該基部に近いロボットアーム(14)に対して、特に実質的に水平な旋回軸について、回動可能であること
を特徴とする請求項1乃至4のいずれか1項に記載の塗装装置。
【請求項6】
a)前記塗装ロボット(6、7)には、ロボット・ベース(12)、回転可能なロボット部分(13)、回動可能な基部に近いロボットアーム(14)および回動可能な末端のロボットアーム(15)を備えること、
b)当該回転可能なロボット部分(13)は、当該ロボット・ベース(12)に対し、実質的に水平な回転軸について回転可能であること、
c)当該基部に近いロボットアーム(14)は、当該回転可能なロボット部分(13)に対して、特に当該回転可能なロボット部分(13)の回転軸に直角な旋回軸について、特に前記構成部品(2)の搬送方向に直角に、回動可能であること、
d)当該末端のロボットアーム(15)は、当該基部に近いロボットアーム(14)に対して、特に当該回転可能なロボット部分(13)の回転軸に直角な旋回軸について、特に前記構成部品(2)の搬送方向に対し直角に、回動可能であること
を特徴とする請求項1乃至4のいずれか1項に記載の塗装装置。
【請求項7】
a)前記回転可能なロボット部分(13)は、前記ロボット・ベース(12)の下に配置される、または、
b)前記回転可能なロボット部分(13)は、前記ロボット・ベース(12)の側に配置される、または、
c)前記回転可能なロボット部分(13)は、前記ロボット・ベース(12)より上に配置される
ことを特徴とする請求項5または6に記載の塗装装置。
【請求項8】
a)複数の柔軟性のある供給ホース(21)が、前記塗装ロボット(6、7)の運転のために必要な媒体、特に圧縮空気、塗料および水洗浄剤、を供給するために備えられていること、
b)回転可能な継手が、前記回転可能なロボット部分(13)と前記基部に近いロボットアーム(14)との間に、および/または前記基部に近いロボットアーム(14)と前記末端のロボットアーム(15と)の間に配置されること、
c)継手の回転の際、当該供給ホース(21)が長さ方向の張力あるいは圧縮の応力を受けず、むしろ曲げ負荷だけを受けるよう、当該供給ホース(21)は中立の繊維組織の継手を通して案内されること、および/または
d)当該供給ホース(21)は当該継手の回転軸(22)を通ること、および/または
e)前記塗装ロボット(6、7)の個々の当該供給ホース(21)は、当該供給ホース(21)が、前記ロボットアーム(14、15)の軸周りの旋回の間、ホース平面においてだけ曲げられるように、前記回転可能なロボット部分(13)から前記末端のロボットアーム(15)までそれぞれホース平面を通ること
を特徴とする請求項5乃至7のいずれか1項に記載の塗装装置。
【請求項9】
a)前記基部に近いロボットアーム(14)にまたはその中に、および/または
b)前記末端のロボットアーム(15)にまたはその中に、
配置された塗装設備を特徴とする請求項1乃至8のいずれか1項に記載の塗装装置。
【請求項10】
a)前記塗装設備は、頻繁に使用されるコーティング剤のための構成部品およびまれにしか使用されないコーティング剤のための構成部品を備えること、
b)当該まれにしか使用されないコーティング剤のための前記塗装設備の構成部品は、前記基部に近いロボットアームに、または、その中に取り付けられること、
c)当該頻繁に使用されるコーティング剤のための前記塗装設備の構成部品は、末端のロボットアームに、または、その中に取り付けられること
を特徴とする請求項9に記載の塗装装置。
【請求項11】
前記ロボットアーム(14、15)に、または、その中に配置される塗装設備は、
a)所望の色を選択するための少なくとも一つの色チェンジャーであって、当該色チェンジャーは、入力側が複数の色フィードラインに、そして、出力側がアトマイザーに接続されるもの、および/または
b)塗布される塗料を計測する少なくとも一つの計量ポンプまたは別の計測機材、および/または
c)当該計量ポンプまたは当該計測機材を駆動するモータ、および/または
d)塗布圧を調整するための塗料圧力調整器、および/または
e)静電塗装のために必要とされる高電圧を発生させるための高電圧発生器
の器材を含むことを特徴とする請求項9または10に記載の塗装装置。
【請求項12】
a)前記末端のロボットアーム(15)は、エルボ継手(18)を介して前記基部に近いロボットアーム(14)に回動可能に接続されること、および/または
b)前記基部に近いロボットアーム(14)と前記末端のロボットアーム(15)と間の当該エルボ継手(18)は、少なくとも一つのロボット位置において、下方へ案内されること、および/または
c)1つのロボットが位置における前記末端のロボットアーム(15)は、実質的に水平に動作して、内部を塗装するために、前記車両本体(2)の内部に、水平方向に案内されうること、および/または
d)前記基部に近いロボットアーム(14)および前記末端のロボットアーム(15)との間の当該エルボ継手(18)は、少なくとも一つのロボット位置において、上方へ案内されること、および/または
e)前記塗装ロボット(6、7)は、前記車両本体(2)の内部を塗装することに適すること
を特徴とする請求項6乃至11のいずれか1項に記載の塗装装置。
【請求項13】
前記ロボット・ベース(12)は、前記コンベヤ(3)に対して上方に、特に塗装される構成部品(2)の上側より上の高さに、フセットされた、前記塗装装置(1)を通って塗装される前記構成部品(2)を搬送する前記コンベヤ(3)を特徴とする請求項1乃至12のいずれか1項に記載の塗装装置。
【請求項14】
a)前記ロボット・ベース(12)は、特に支柱を構成する前記制御キャビネット(8、9)に直接、固定して取り付けられること、または、
b)前記塗装ロボット(6、7)と前記ロボット・ベース(12)は、特に塗装される前記構成部品(2)の搬送方向に、移動レール(27、28、29)上で移動でき、当該移動レール(27、28、29)は、支柱として構成される前記制御キャビネット(8、9)で支えられること
を特徴とする請求項1乃至13のいずれか1項に記載の塗装装置。
【請求項15】
a)塗装される前記構成部品(2)のドアまたはフード(31)を開閉するためのハンドリング・ロボット(26)、および/または
b)前記支柱に設けられた前記移動レール(27)およびそれに沿って当該ハンドリング・ロボット(26)は移動できること
を特徴とする請求項1乃至14のいずれか1項に記載の塗装装置。
【請求項16】
a)前記ハンドリング・ロボット(26)用の前記移動レール(27)は、前記支柱のみによって支えられること、および/または
b)塗前記装ロボット(6、7)は、前記ハンドリング・ロボット(26)用の前記移動レール(27)と同じ前記支柱(8、9)に固定して取り付けられること、および/または
c)前記塗装ロボット(6、7)は、前記支柱上の前記ハンドリング・ロボット(26)より上に取り付けられること、および/または
d)前記ハンドリング・ロボット(26)用の前記移動レール(27)は、前記塗装ブース(1)より短いこと、および/または
e)前記ハンドリング・ロボット(26)用の前記移動レール(27)は、前記構成部品(2)の搬送方向に、前記塗装ロボット(6、7)に対してオフセットされて配置されること
を特徴とする請求項15に記載の塗装装置。
【請求項17】
a)前記塗装ロボット(6、7)は、前記塗装ブース(1)に配置されること、
b)支柱として構成される前記制御キャビネット(8、9)は、前記塗装ブース(1)の外側に配置されること、および/または
c)前記塗装ブース(1)は、実質的に平らなブースの壁(4、5)を有すること、および/または
d)前記塗装ブース(1)は、少なくとも部分的に透明であるかまたは少なくとも一つの監視窓を備えた当該ブースの壁(4、5)を有すること
を特徴とする請求項1乃至16のいずれか1項に記載の塗装装置。
【請求項18】
前記塗装ロボット(6、7)は、アトマイザー(17)に加えて、前記ドアまたは塗装される前記構成部品(2)の前記フード(31)を開くためのハンドリング・グリップ(30)を備えることを特徴とする請求項1乃至17のいずれか1項に記載の塗装装置。
【請求項19】
a)前記制御キャビネットを構成している前記支柱(37)は、移動レール(38、39)を移動可能であること、および/または
b)前記支柱(37)のための前記移動レール(38、39)は、塗装される前記車両本体の搬送方向と実質的に平行に配向されること、および/または
c)移動可能な前記支柱(37)は、実質的に垂直に配向されること、および/または
d)前記塗装ロボット(32)は、前記支柱(37)を垂直方向に移動可能であること
を特徴とする請求項1乃至18のいずれか1項に記載の塗装装置。
【請求項20】
a)前記塗装ロボットが位置を変えることができる移動レール、と
b)前記塗装ロボットを当該移動レールに接続するための実質的に垂直方向のキャリア、当該キャリアは、その下側に前記塗装ロボットの前記ロボット・ベースを乗せると共に、その上側が当該移動レールにより案内され、当該移動レールに沿って位置を変えることができること
を特徴とする請求項1乃至19のいずれか1項に記載の塗装装置。
【請求項21】
a)前記塗装装置を通って、搬送方向に塗装される構成部品を搬送するコンベヤ、と
b)前記塗装ロボットが位置を変えることができる、少なくとも一つの移動レールであって、当該移動レールは搬送方向に対し横断方向を向いていること
を特徴とする請求項1乃至20のいずれか1項に記載の塗装装置。
【請求項22】
a)側面のブース壁を有する前記塗装ブース、および/または
b)前記塗装ブースの特定のブース幅、ここで当該ブース幅は、前記塗装ロボットのための前記移動レールの前後の搬送方向において、前記塗装ロボットのための前記移動レールの側端の方向により大きい、および/または
c)横断方向に配置された前記移動レールの側端に対する、ブースの壁の側面の凹み、それにより前記移動レールの前記塗装ロボットは、前記塗装ブースの当該凹みに移動して入ることができる
ことを特徴とする請求項21に記載の塗装装置。
【請求項23】
a)前記塗装ロボットは、少なくとも2つの前記ロボットアームが可動に関節でつながれた前記ロボット・ベースを備え、および/または
b)前記ロボットアームは、各々前記アトマイザーを案内し、または、
c)1つの前記ロボットアームは、前記アトマイザーを案内し、他の前記ロボットアームはハンドリング工具、特に車両本体のフードやドアを開閉するための把持具を案内する
ことを特徴とする請求項1乃至22のいずれか1項に記載の塗装装置。
【請求項24】
塗料を塗布するための塗装ロボット(6、7)、ロボット制御装置(23、24)および当該ロボット制御装置(23、24)を収容する制御キャビネット(8、9)を備えた塗装装置(1)を製造、試験および/または据え付けするための、特に請求項1乃至23のいずれか1項に記載の塗装装置(1)のための方法であって、
a)当該制御キャビネット(8、9)が当該塗装ロボット(6、7)を機械的に支持できるように、当該制御キャビネット(8、9)は当該塗装ロボット(6、7)のための支柱として構成され、
b)当該塗装ロボット(6、7)は、支柱として構成される当該制御キャビネット(8、9)に、直接、または移動レール(27、28、29)の手段により取り付けられる
ことを特徴とする方法。
【請求項25】
a)前記塗装ロボット(6、7)、前記制御キャビネット(8、9)および/または前記移動レールを備えるモジュールを、顧客の敷地ではなく、製造業者の敷地で、予め組み立てるステップ、および/または
b)予め組み立てられた当該モジュールを前記製造業者の施設で試験するステップ、および/または
c)予め組み立てられた当該モジュールを据え付け場所へ移送するステップ、および/または
d)据え付け場所で予め組み立てられたおよび/または試験された当該モジュールを最終的に据え付け、当該モジュールを、前記塗装ロボット(6、7)の運転のために必要な全てのラインに機械的に固定し、接続するステップ
からなることを特徴とする請求項24に記載の方法。
【請求項26】
前記試験の際は、前記塗装ロボット(6、7)および/または前記ロボット制御装置(23、24)が試験されることを特徴とする請求項25に記載の方法。
【請求項27】
a)塗装される車両本体(2)の脇に実質的に水平に前記塗装ロボット(6、7)の末端のロボットアーム(15)の位置を定めるステップ、ここで、当該末端のアーム(15)は実質的に搬送方向に対し横断する方向に配向され、そして、前記塗装ロボット(6、7)のエルボ継手(18)は下方へ案内される、
b)塗装される当該車両本体(2)の内部に、実質的に水平方向のアトマイザー(17)を有する当該末端のロボットアーム(15)を案内するステップ、
c)当該末端のロボットアーム(15)が案内された際に、当該車両本体(2)の内部を塗装するステップ
からなることを特徴とする車両本体の内部を塗装するための請求項24乃至26のいずれか1項に記載の方法。
【請求項1】
a)アトマイザーの位置を定める多軸塗装ロボット(6、7)と、
b)当該塗装ロボット(6、7)を制御するためのロボット制御装置(23、24)と、
c)当該ロボット制御装置(23、24)を収容する制御キャビネット(8、9)と
からなる構成部品(2)を塗装するための、特に車両本体またはその部分を塗装するための塗装装置(1)において
d)当該制御キャビネット(8、9)は、機械的に当該塗装ロボット(6、7)を支持する支柱を構成する
ことを特徴とする塗装装置。
【請求項2】
a)前記塗装ロボット(6、7)および前記制御キャビネット(8、9)と前記塗装装置(1)とは、予め組み立てられたモジュールを構成すること、
b)前記制御キャビネット(8、9)はインターフェイスを有し、それを介して前記塗装ロボット(6、7)の運転のために必要なすべての流体および電気的な供給ラインを接続できること、
c)当該供給ラインは、前記制御キャビネットの当該インターフェイスから前記塗装ロボット(6、7)まで、当該予め組み立てられたモジュール内で案内される
ことを特徴とする請求項1または2に記載の塗装装置。
【請求項3】
a)前記塗装ロボット(6、7)は、前記インターフェイス(19、20)により、前記制御キャビネット(8、9)に、着脱可能に接続されること、
b)前記塗装ロボット(6、7)は、前記インターフェイス(19、20)により、支柱に機械的に取り付けられること、
c)前記インターフェイス(19、20)は、前記塗装ロボット(6、7)の運転のために必要な、前記制御キャビネット(8、9)と前記塗装ロボット(6、7)との間のすべての流体および電気的な供給ラインを収容していること
を特徴とする請求項1乃至3のいずれか1項に記載の塗装装置。
【請求項4】
前記インターフェイスには、供給ライン(21)として
a)前記塗装ロボット(6、7)に圧縮空気を供給するための少なくとも一つの空気圧系ライン、および/または
b)前記塗装ロボット(6、7)に塗布される塗料を供給するための少なくとも一つの塗料ライン、および/または
c)前記塗装ロボット(6、7)に洗浄剤を供給するための洗浄剤ライン、および/または
d)前記塗装ロボット(6、7)からの当該洗浄剤および/または当該塗料の帰還のためのもどり管路、および/または
e)前記ロボット制御装置(23、24)によるロボットの駆動のための電気的な制御ライン、および/または
f)前記塗装ロボット(6、7)から前記ロボット制御装置(23、24)へセンサ計量値を伝達するための少なくとも一つのセンサ・ライン
が備えられていることを特徴とする請求項2または3に記載の塗装装置。
【請求項5】
a)前記塗装ロボット(6、7)は、ロボット・ベース(12)、回転可能なロボット部分(13)、回動可能な基部に近いロボットアーム(14)および回動可能な末端のロボットアーム(15)を備えること、
b)当該回転可能なロボット部分(13)は、当該ロボット・ベース(12)に対し、実質的に垂直な回転軸について回転可能であること、
c)当該基部に近いロボットアーム(14)は、当該回転可能なロボット部分(13)対して、特に実質的に水平旋回軸について、回動可能であること、
d)当該末端のロボットアーム(15)は、当該基部に近いロボットアーム(14)に対して、特に実質的に水平な旋回軸について、回動可能であること
を特徴とする請求項1乃至4のいずれか1項に記載の塗装装置。
【請求項6】
a)前記塗装ロボット(6、7)には、ロボット・ベース(12)、回転可能なロボット部分(13)、回動可能な基部に近いロボットアーム(14)および回動可能な末端のロボットアーム(15)を備えること、
b)当該回転可能なロボット部分(13)は、当該ロボット・ベース(12)に対し、実質的に水平な回転軸について回転可能であること、
c)当該基部に近いロボットアーム(14)は、当該回転可能なロボット部分(13)に対して、特に当該回転可能なロボット部分(13)の回転軸に直角な旋回軸について、特に前記構成部品(2)の搬送方向に直角に、回動可能であること、
d)当該末端のロボットアーム(15)は、当該基部に近いロボットアーム(14)に対して、特に当該回転可能なロボット部分(13)の回転軸に直角な旋回軸について、特に前記構成部品(2)の搬送方向に対し直角に、回動可能であること
を特徴とする請求項1乃至4のいずれか1項に記載の塗装装置。
【請求項7】
a)前記回転可能なロボット部分(13)は、前記ロボット・ベース(12)の下に配置される、または、
b)前記回転可能なロボット部分(13)は、前記ロボット・ベース(12)の側に配置される、または、
c)前記回転可能なロボット部分(13)は、前記ロボット・ベース(12)より上に配置される
ことを特徴とする請求項5または6に記載の塗装装置。
【請求項8】
a)複数の柔軟性のある供給ホース(21)が、前記塗装ロボット(6、7)の運転のために必要な媒体、特に圧縮空気、塗料および水洗浄剤、を供給するために備えられていること、
b)回転可能な継手が、前記回転可能なロボット部分(13)と前記基部に近いロボットアーム(14)との間に、および/または前記基部に近いロボットアーム(14)と前記末端のロボットアーム(15と)の間に配置されること、
c)継手の回転の際、当該供給ホース(21)が長さ方向の張力あるいは圧縮の応力を受けず、むしろ曲げ負荷だけを受けるよう、当該供給ホース(21)は中立の繊維組織の継手を通して案内されること、および/または
d)当該供給ホース(21)は当該継手の回転軸(22)を通ること、および/または
e)前記塗装ロボット(6、7)の個々の当該供給ホース(21)は、当該供給ホース(21)が、前記ロボットアーム(14、15)の軸周りの旋回の間、ホース平面においてだけ曲げられるように、前記回転可能なロボット部分(13)から前記末端のロボットアーム(15)までそれぞれホース平面を通ること
を特徴とする請求項5乃至7のいずれか1項に記載の塗装装置。
【請求項9】
a)前記基部に近いロボットアーム(14)にまたはその中に、および/または
b)前記末端のロボットアーム(15)にまたはその中に、
配置された塗装設備を特徴とする請求項1乃至8のいずれか1項に記載の塗装装置。
【請求項10】
a)前記塗装設備は、頻繁に使用されるコーティング剤のための構成部品およびまれにしか使用されないコーティング剤のための構成部品を備えること、
b)当該まれにしか使用されないコーティング剤のための前記塗装設備の構成部品は、前記基部に近いロボットアームに、または、その中に取り付けられること、
c)当該頻繁に使用されるコーティング剤のための前記塗装設備の構成部品は、末端のロボットアームに、または、その中に取り付けられること
を特徴とする請求項9に記載の塗装装置。
【請求項11】
前記ロボットアーム(14、15)に、または、その中に配置される塗装設備は、
a)所望の色を選択するための少なくとも一つの色チェンジャーであって、当該色チェンジャーは、入力側が複数の色フィードラインに、そして、出力側がアトマイザーに接続されるもの、および/または
b)塗布される塗料を計測する少なくとも一つの計量ポンプまたは別の計測機材、および/または
c)当該計量ポンプまたは当該計測機材を駆動するモータ、および/または
d)塗布圧を調整するための塗料圧力調整器、および/または
e)静電塗装のために必要とされる高電圧を発生させるための高電圧発生器
の器材を含むことを特徴とする請求項9または10に記載の塗装装置。
【請求項12】
a)前記末端のロボットアーム(15)は、エルボ継手(18)を介して前記基部に近いロボットアーム(14)に回動可能に接続されること、および/または
b)前記基部に近いロボットアーム(14)と前記末端のロボットアーム(15)と間の当該エルボ継手(18)は、少なくとも一つのロボット位置において、下方へ案内されること、および/または
c)1つのロボットが位置における前記末端のロボットアーム(15)は、実質的に水平に動作して、内部を塗装するために、前記車両本体(2)の内部に、水平方向に案内されうること、および/または
d)前記基部に近いロボットアーム(14)および前記末端のロボットアーム(15)との間の当該エルボ継手(18)は、少なくとも一つのロボット位置において、上方へ案内されること、および/または
e)前記塗装ロボット(6、7)は、前記車両本体(2)の内部を塗装することに適すること
を特徴とする請求項6乃至11のいずれか1項に記載の塗装装置。
【請求項13】
前記ロボット・ベース(12)は、前記コンベヤ(3)に対して上方に、特に塗装される構成部品(2)の上側より上の高さに、フセットされた、前記塗装装置(1)を通って塗装される前記構成部品(2)を搬送する前記コンベヤ(3)を特徴とする請求項1乃至12のいずれか1項に記載の塗装装置。
【請求項14】
a)前記ロボット・ベース(12)は、特に支柱を構成する前記制御キャビネット(8、9)に直接、固定して取り付けられること、または、
b)前記塗装ロボット(6、7)と前記ロボット・ベース(12)は、特に塗装される前記構成部品(2)の搬送方向に、移動レール(27、28、29)上で移動でき、当該移動レール(27、28、29)は、支柱として構成される前記制御キャビネット(8、9)で支えられること
を特徴とする請求項1乃至13のいずれか1項に記載の塗装装置。
【請求項15】
a)塗装される前記構成部品(2)のドアまたはフード(31)を開閉するためのハンドリング・ロボット(26)、および/または
b)前記支柱に設けられた前記移動レール(27)およびそれに沿って当該ハンドリング・ロボット(26)は移動できること
を特徴とする請求項1乃至14のいずれか1項に記載の塗装装置。
【請求項16】
a)前記ハンドリング・ロボット(26)用の前記移動レール(27)は、前記支柱のみによって支えられること、および/または
b)塗前記装ロボット(6、7)は、前記ハンドリング・ロボット(26)用の前記移動レール(27)と同じ前記支柱(8、9)に固定して取り付けられること、および/または
c)前記塗装ロボット(6、7)は、前記支柱上の前記ハンドリング・ロボット(26)より上に取り付けられること、および/または
d)前記ハンドリング・ロボット(26)用の前記移動レール(27)は、前記塗装ブース(1)より短いこと、および/または
e)前記ハンドリング・ロボット(26)用の前記移動レール(27)は、前記構成部品(2)の搬送方向に、前記塗装ロボット(6、7)に対してオフセットされて配置されること
を特徴とする請求項15に記載の塗装装置。
【請求項17】
a)前記塗装ロボット(6、7)は、前記塗装ブース(1)に配置されること、
b)支柱として構成される前記制御キャビネット(8、9)は、前記塗装ブース(1)の外側に配置されること、および/または
c)前記塗装ブース(1)は、実質的に平らなブースの壁(4、5)を有すること、および/または
d)前記塗装ブース(1)は、少なくとも部分的に透明であるかまたは少なくとも一つの監視窓を備えた当該ブースの壁(4、5)を有すること
を特徴とする請求項1乃至16のいずれか1項に記載の塗装装置。
【請求項18】
前記塗装ロボット(6、7)は、アトマイザー(17)に加えて、前記ドアまたは塗装される前記構成部品(2)の前記フード(31)を開くためのハンドリング・グリップ(30)を備えることを特徴とする請求項1乃至17のいずれか1項に記載の塗装装置。
【請求項19】
a)前記制御キャビネットを構成している前記支柱(37)は、移動レール(38、39)を移動可能であること、および/または
b)前記支柱(37)のための前記移動レール(38、39)は、塗装される前記車両本体の搬送方向と実質的に平行に配向されること、および/または
c)移動可能な前記支柱(37)は、実質的に垂直に配向されること、および/または
d)前記塗装ロボット(32)は、前記支柱(37)を垂直方向に移動可能であること
を特徴とする請求項1乃至18のいずれか1項に記載の塗装装置。
【請求項20】
a)前記塗装ロボットが位置を変えることができる移動レール、と
b)前記塗装ロボットを当該移動レールに接続するための実質的に垂直方向のキャリア、当該キャリアは、その下側に前記塗装ロボットの前記ロボット・ベースを乗せると共に、その上側が当該移動レールにより案内され、当該移動レールに沿って位置を変えることができること
を特徴とする請求項1乃至19のいずれか1項に記載の塗装装置。
【請求項21】
a)前記塗装装置を通って、搬送方向に塗装される構成部品を搬送するコンベヤ、と
b)前記塗装ロボットが位置を変えることができる、少なくとも一つの移動レールであって、当該移動レールは搬送方向に対し横断方向を向いていること
を特徴とする請求項1乃至20のいずれか1項に記載の塗装装置。
【請求項22】
a)側面のブース壁を有する前記塗装ブース、および/または
b)前記塗装ブースの特定のブース幅、ここで当該ブース幅は、前記塗装ロボットのための前記移動レールの前後の搬送方向において、前記塗装ロボットのための前記移動レールの側端の方向により大きい、および/または
c)横断方向に配置された前記移動レールの側端に対する、ブースの壁の側面の凹み、それにより前記移動レールの前記塗装ロボットは、前記塗装ブースの当該凹みに移動して入ることができる
ことを特徴とする請求項21に記載の塗装装置。
【請求項23】
a)前記塗装ロボットは、少なくとも2つの前記ロボットアームが可動に関節でつながれた前記ロボット・ベースを備え、および/または
b)前記ロボットアームは、各々前記アトマイザーを案内し、または、
c)1つの前記ロボットアームは、前記アトマイザーを案内し、他の前記ロボットアームはハンドリング工具、特に車両本体のフードやドアを開閉するための把持具を案内する
ことを特徴とする請求項1乃至22のいずれか1項に記載の塗装装置。
【請求項24】
塗料を塗布するための塗装ロボット(6、7)、ロボット制御装置(23、24)および当該ロボット制御装置(23、24)を収容する制御キャビネット(8、9)を備えた塗装装置(1)を製造、試験および/または据え付けするための、特に請求項1乃至23のいずれか1項に記載の塗装装置(1)のための方法であって、
a)当該制御キャビネット(8、9)が当該塗装ロボット(6、7)を機械的に支持できるように、当該制御キャビネット(8、9)は当該塗装ロボット(6、7)のための支柱として構成され、
b)当該塗装ロボット(6、7)は、支柱として構成される当該制御キャビネット(8、9)に、直接、または移動レール(27、28、29)の手段により取り付けられる
ことを特徴とする方法。
【請求項25】
a)前記塗装ロボット(6、7)、前記制御キャビネット(8、9)および/または前記移動レールを備えるモジュールを、顧客の敷地ではなく、製造業者の敷地で、予め組み立てるステップ、および/または
b)予め組み立てられた当該モジュールを前記製造業者の施設で試験するステップ、および/または
c)予め組み立てられた当該モジュールを据え付け場所へ移送するステップ、および/または
d)据え付け場所で予め組み立てられたおよび/または試験された当該モジュールを最終的に据え付け、当該モジュールを、前記塗装ロボット(6、7)の運転のために必要な全てのラインに機械的に固定し、接続するステップ
からなることを特徴とする請求項24に記載の方法。
【請求項26】
前記試験の際は、前記塗装ロボット(6、7)および/または前記ロボット制御装置(23、24)が試験されることを特徴とする請求項25に記載の方法。
【請求項27】
a)塗装される車両本体(2)の脇に実質的に水平に前記塗装ロボット(6、7)の末端のロボットアーム(15)の位置を定めるステップ、ここで、当該末端のアーム(15)は実質的に搬送方向に対し横断する方向に配向され、そして、前記塗装ロボット(6、7)のエルボ継手(18)は下方へ案内される、
b)塗装される当該車両本体(2)の内部に、実質的に水平方向のアトマイザー(17)を有する当該末端のロボットアーム(15)を案内するステップ、
c)当該末端のロボットアーム(15)が案内された際に、当該車両本体(2)の内部を塗装するステップ
からなることを特徴とする車両本体の内部を塗装するための請求項24乃至26のいずれか1項に記載の方法。
【図1】


【図2A】
【図2B】
【図2C】
【図2D】
【図2E】
【図2F】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2A】
【図2B】
【図2C】
【図2D】
【図2E】
【図2F】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公表番号】特表2012−501820(P2012−501820A)
【公表日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2011−525434(P2011−525434)
【出願日】平成21年8月19日(2009.8.19)
【国際出願番号】PCT/EP2009/006007
【国際公開番号】WO2010/025827
【国際公開日】平成22年3月11日(2010.3.11)
【出願人】(504389784)デュール システムズ ゲゼルシャフト ミット ベシュレンクテル ハフツング (54)
【Fターム(参考)】
【公表日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成21年8月19日(2009.8.19)
【国際出願番号】PCT/EP2009/006007
【国際公開番号】WO2010/025827
【国際公開日】平成22年3月11日(2010.3.11)
【出願人】(504389784)デュール システムズ ゲゼルシャフト ミット ベシュレンクテル ハフツング (54)
【Fターム(参考)】
[ Back to top ]