
塵芥収集車の運行管理システム
【課題】可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示する。
【解決手段】車載器11は、塵芥収集車10が移動中の間は、GPS受信機12により測位した位置データと所定エリアA内の全てのステーションの位置データを基に、各ステーションとの相対距離を演算する。そして、車両停車時には、停車地点における各ステーションとの相対距離を演算し、過去一定時間の範囲で相対距離が連続増加したステーションを第1種のステーションとして抽出し、また、収集済みフラグがセットされたステーションを第2種のステーションとして抽出し、更に、所定距離以内のステーションを第3種のステーションとして抽出して、第3種のステーションの中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成する。
【解決手段】車載器11は、塵芥収集車10が移動中の間は、GPS受信機12により測位した位置データと所定エリアA内の全てのステーションの位置データを基に、各ステーションとの相対距離を演算する。そして、車両停車時には、停車地点における各ステーションとの相対距離を演算し、過去一定時間の範囲で相対距離が連続増加したステーションを第1種のステーションとして抽出し、また、収集済みフラグがセットされたステーションを第2種のステーションとして抽出し、更に、所定距離以内のステーションを第3種のステーションとして抽出して、第3種のステーションの中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の廃棄物集積所を巡回し廃棄物を収集する塵芥収集車の運行管理システムに関する。
【背景技術】
【0002】
一般に、店舗や企業等において生じる事業系一般廃棄物や一般家庭で生じる廃棄物(以下、単に廃棄物と称する)は、予め定められた廃棄物集積所(以下、ステーションと称する)に集められ、例えば、予め契約している廃棄物収集業者(以下、単に収集業者と称する)の塵芥収集車によって収集される。塵芥収集車は、通常、所定エリア内の膨大な数のステーションを定期的に巡回し、各ステーションにおいては、車両に同行する作業員が、収集した廃棄物を計量し、計量した重量に基づき請求書伝票等を作成している。
【0003】
例えば、特開2001−163403号公報では、緯度・経度で示される位置に設けられた廃棄物の収集場所のコンテナ装置に、廃棄物の重量を計測する装置と、計測した重量をセンタ装置に送信する送信装置とを設け、センタ装置で、塵芥収集車側で計測した残積載量と各収集場所からの廃棄物の重量とを比較して収集すべき次の収集場所情報を算出し、塵芥収集車に通知する技術が開示されている。
【特許文献1】特開2001−163403号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上述の特許文献1に開示されるような従来の塵芥収集車の運行管理システムでは、収集すべきステーションと収集の終わっていないステーションを単に自車位置から近い順にソートして作業員に提示するようになっている。しかしながら、特に都心部のようなステーションが多数存在するエリアでは、ソートするステーションの数も膨大となるため、上述のような単純に近い順にソートする技術では、演算負荷が大きくなり、素早く作業員に収集すべきステーションを提示できないという問題がある。また、多くのステーションが存在するため、これら全てを対象としたソートでは、目的のステーションを的確に絞り込むことができず、収集すべきステーションを正確に作業員に提示できなくなる虞もある。
【0005】
本発明は上記事情に鑑みてなされたもので、可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示することができる塵芥収集車の運行管理システムを提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明は、所定エリア内の複数の廃棄物集積所を巡回し廃棄物を収集する塵芥収集車の運行管理システムにおいて、上記塵芥収集車に設けられ、GPS衛星からの電波を受信し車両位置の緯度・経度を測位する車両位置測位手段と、上記所定エリア内の複数の廃棄物集積所の緯度・経度情報を記録したメモリ手段と、上記所定エリア内の複数の廃棄物集積所と上記塵芥収集車との相対距離を演算する相対距離演算手段と、上記相対距離演算手段で演算した各相対距離の増減傾向を演算する増減傾向演算手段と、少なくとも上記相対距離が増加傾向を示す廃棄物集積所を上記複数の廃棄物収集所から除外して、上記塵芥収集車が巡回する廃棄物集積所のリストを作成するリスト作成手段とを備えたことを特徴としている。
【発明の効果】
【0007】
本発明による塵芥収集車の運行管理システムによれば、可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示することが可能となる。
【発明を実施するための最良の形態】
【0008】
以下、図面に基づいて本発明の実施の形態を説明する。
図1〜図6は本発明の実施の一形態を示し、図1は塵芥収集車の運行管理システムの全体構成の概略説明図、図2は運行管理システムの塵芥収集車における機能ブロック図、図3は一台の塵芥収集車が廃棄物収集作業を行う工程を示すフローチャート、図4は図3から続くフローチャート、図5は現ステーションにおける収集量計測処理ルーチンのフローチャート、図6は塵芥収集車とステーションとの相対距離の変化の一例を示す説明図である。
【0009】
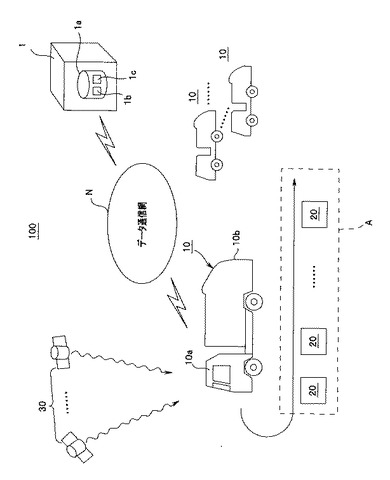
図1において、符号100は運行管理システムを示し、この運行管理システム100は、該システム100を管理する運行管理センタ1と、この運行管理センタ1の下で、所定エリアAを巡回し、複数のステーション20の廃棄物を収集する一台または複数台の塵芥収集車10とから主要に構成される。
【0010】
塵芥収集車10は、複数(例えば、4つ)のGPS(Global Positioning System)衛星30から定期的に電波を受信して現在の車両位置を測位し、その緯度・経度情報等の測位データを、データ通信網Nを介し、運行管理センタ1に送信する。
【0011】
運行管理センタ1においては、センタ装置1a(例えば、サーバシステム)が設けられ、このセンタ装置1aにより塵芥収集車10との通信制御がなされ、また、塵芥収集車10の作業に係るデータが一元管理されるように構成されている。すなわち、センタ装置1aは、塵芥収集車10から送信されたデータを受信するためのセンタ側通信部1bと、受信したデータを記録するための記録部1cとを備えている。
【0012】
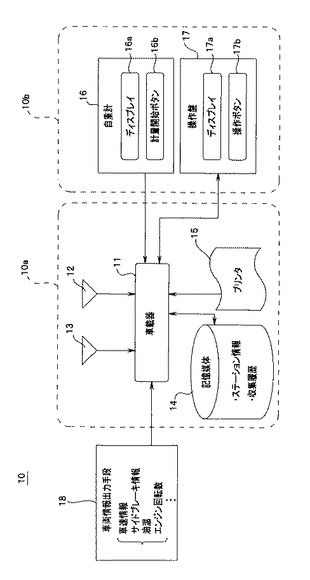
塵芥収集車10は、図2に示すように、車両運転室であるキャビン10a内に車載器11を搭載し、この車載器11が周辺機器の動作を制御するように構成されている。
【0013】
キャビン10aにおいては、上述のGPS衛星30からの電波を受信し、車両の緯度・経度を測位する車両位置測位手段としてのGPS受信機12と、運行管理センタ1とデータ通信網Nを介して通信するためのデータ通信機13とが設けられ、それぞれ車載器11に接続されている。尚、データ通信網Nとしては、例えば既存の携帯電話網やインターネット網を適用することができ、データ通信の方式としてはパケット交換方式が好ましい。
【0014】
また、キャビン10aにおいて、車載器11には、各種データを記録し、電源供給がとぎれても記録内容が消滅しない記憶媒体(例えば、Compact Flash(登録商標)カード等の不揮発メモリ)14とプリンタ15とが接続されている。尚、記憶媒体14は、抜き差し自在であり、運行管理センタ1のセンタ装置1aによってもデータの読み出し、及び、書き込みが可能になっている。
【0015】
記憶媒体14には、所定エリアA内の全てのステーション情報(ステーション名(集積所名)、緯度・経度データ等)がステーションリスト(全体リスト)として予め記録され、更に収集作業の度に収集履歴データが記録されるようになっている。すなわち、記憶媒体14は、メモリ手段として設けられている。
【0016】
また、上述の収集履歴データとは、日時情報、収集した廃棄物の計量結果、緯度・経度データ(上述の平均値)、ステーション名、車載器11固有の情報としての電話番号、データ通信網Nの圏内か否かを識別するフラグ(データ通信圏識別フラグ)等である。尚、全体リストは、緯度又は経度を基準としてソートした状態で記憶されている。
【0017】
収集履歴データの車載器11の電話番号は、運行管理センタ1において、管理すべき収集履歴データがどの車載器11(塵芥収集車10)のものであるのかを特定するのに用いられる。すなわち、例えば、複数の塵芥収集車10から持ち込まれた複数の記憶媒体14が、どの車載器11のものであるのかを、それぞれ特定する場合に、その中に記録された電話番号データを参照することにより容易に特定することができる。
【0018】
また、収集履歴データのデータ通信圏識別フラグは、塵芥収集車10による所定エリアAの巡回が終了し、運行管理センタ1のセンタ装置1aによって記憶媒体14の内容が読み出された際に、どのステーション20が通信圏外で通信できず、収集履歴の更新がなされていないのかを選別するために用いられる。
【0019】
更に、プリンタ15は、各ステーション20において収集した廃棄物の重量と、その重量に基づき換算した請求額とを印字し、請求書として出力するために設けられている。
【0020】
車両後部10bには、それまでに集積した廃棄物の総重量(現在の積載総重量)Miと、各ステーションで収集した廃棄物の重量(各ステーションにおける廃棄物の収集量)ΔMiを計量することが可能な自重計16が設けられている。具体的には、ステーションにおいて廃棄物の収集が行われ、自重計16による計測が行われると、現在の積載総重量Miを計測し、この現在の積載総重量Miから前回までの積載総重量を減算することにより、現ステーションにおける廃棄物の収集量ΔMiが演算される。
【0021】
そして、自重計16は、計量した重量値を表示するディスプレイ16aと、計量開始とプリンタ15での印刷開始とを指示するための計量開始ボタン16bとを有している。
【0022】
また、自重計16は、車載器11と接続され、計量開始ボタン16bを押すことにより、計量結果が日時情報、ステーション名、緯度・経度データ等と共に、収集履歴データとして記憶媒体14に記録され、同時にデータ通信機13により運行管理センタ1に送信される。尚、計量結果が記憶媒体14に記録される際には、車載器固有の情報としての電話番号、データ通信圏識別フラグも収集履歴データとして同時に記録される。
【0023】
すなわち、各ステーション20において清掃作業員が廃棄物を収集し、計量開始ボタン16bを押すことにより計量が開始され、計量結果である廃棄物重量、それに基づく請求金額等がプリンタ15で印刷される。また同時に、収集した廃棄物の重量を含む収集履歴データが記憶媒体14に記録され、データ通信可能であれば運行管理センタ1に送信される。
【0024】
また、車両後部10bには、操作盤17が設けられている。この操作盤17は、車両周辺の複数(例えば、3箇所)のステーション名を表示するためのディスプレイ17aと、表示されたステーション名のリスト(このリストについては後述する)の中から作業員が現在のステーションを選択し、特定するための操作ボタン17bとを有している。
【0025】
この操作盤17は、車載器11に接続され、操作ボタン17bの操作により選択されたステーション名が現在収集作業を行うステーション(現ステーション)20の名前として特定され、車載器11に出力される。こうして、操作盤17で作業員により選択されたステーション名は、収集履歴データ中のステーション名としてプリンタ15、記憶媒体14、運行管理センタ1に出力される。
【0026】
ここで、上述のディスプレイ17aに表示されるリストの作成について説明する。
車載器11は、塵芥収集車10が移動中の間は、GPS受信機12により測位した車両の緯度・経度データと所定エリアA内の全てのステーションの緯度・経度データを基に、これら各ステーションとの相対距離(例えば、単純な直線距離)を演算する。そして、車両停車時には、停車地点における各ステーションとの相対距離を上述と同様に演算し、過去一定時間の範囲(例えば、停車するまでの3分間)で相対距離が連続して増加したステーションを第1種のステーションとして分類抽出する。また、収集済みフラグ(廃棄物の収集の際に作業員により操作ボタン17bで特定され、且つ、計量開始ボタン16bが押された際に該当のステーションに対してセットされるフラグ)がセットされたステーションを第2種のステーションとして分類抽出する。更に、所定距離以内のステーションを第3種のステーションとして分類抽出し、該第3種のステーションとして抽出されたステーション群の中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成する。尚、上述の収集済みフラグは、塵芥収集車10が廃棄物の収集を終えて、例えば、廃棄物処理場等で、積載してきた廃棄物の排出を行った際(この際には排出完了フラグが自動的にセットされる)には、全ての収集済みフラグがクリアされる。
【0027】
すなわち、車載器11は、相対距離演算手段、増減傾向演算手段、及び、リスト作成手段としての機能を有している。
【0028】
また、作業員が、収集作業を中断し、各ステーションの巡回を中断する場合は、上述の操作ボタン17bが押され、中断したことを示す信号が記憶媒体14、運行管理センタ1に出力される。
【0029】
更に、塵芥収集車10には、車両情報出力手段18が設けられ、車載器11には、この車両情報出力手段18から、車速情報、サイドブレーキ情報、エンジン回転数等の車両情報が入力される。そして、車載器11は、車両情報出力手段18からの車両情報に基づいて、車両が停車したか否かを判断する。
【0030】
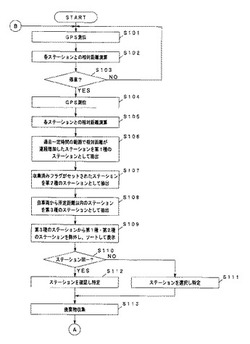
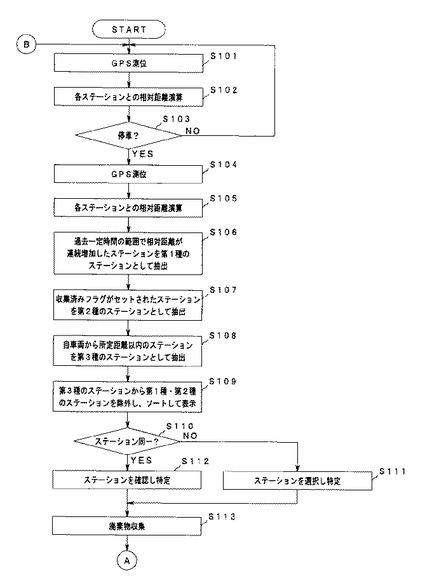
次に、上述のように構成された運行管理システム100において、一台の塵芥収集車10が所定エリアAを巡回し、廃棄物収集作業を行う工程の一例を、図3、図4のフローチャートに基づいて説明する。
【0031】
まず、ステップ(以下、「S」と略称)101では、車載器11は、GPS受信機12によりGPS測位を行い、得られた車両の緯度・経度の測位データを、データ通信網Nを介して運行管理センタ1のセンタ装置1aに送信する。これにより、運行管理センタ1では、各塵芥収集車10がどの地点にいるのか常時把握できる。
【0032】
次に、S102に進み、車載器11は、GPS受信機12により測位した車両の緯度・経度データと記憶媒体14の所定エリアA内の全てのステーションの緯度・経度データを基に、これら各ステーションとの相対距離(例えば、単純な直線距離)を演算する。
【0033】
次いで、S103に進み、車載器11は、車両情報出力手段18からの入力情報に基づいて車両が停車したか否か判定し、車両が停車していないのであれば、S101からの処理を繰り返し、車両が停車しているのであれば、S104に進んで、その地点の測位を行い、S105に進んで、停車地点における各ステーションとの相対距離を演算する。
【0034】
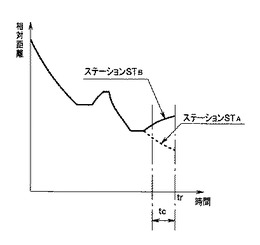
次に、S106に進み、車載器11は、過去一定時間の範囲(例えば、停車するまでの3分間)で塵芥収集車10との相対距離が連続して増加したステーションを第1種のステーションとして分類抽出する。例えば、図6に示すように、過去一定時間tc(本実施の形態では3分間)の間で、ステーションSTAは、塵芥収集車10との相対距離は連続して減少しているが、ステーションSTBは、連続して増加している。従って、ステーションSTBは、第1種のステーションとして抽出されることになる。尚、図6中、時間trは、車両が停車した時刻を示す。
【0035】
次いで、S107に進み、車載器11は、収集済みフラグ(廃棄物の収集の際に作業員により操作ボタン17bで特定され、且つ、計量開始ボタン16bが押された際に該当のステーションに対してセットされるフラグ)がセットされたステーションを第2種のステーションとして分類抽出する。
【0036】
次に、S108に進むと、車載器11は、塵芥収集車10から所定距離以内のステーションを第3種のステーションとして分類抽出する。
【0037】
次いで、S109に進んで、車載器11は、第3種のステーションとして抽出されたステーション群の中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成し、操作盤17のディスプレイ17aに表示する。以上の処理により、通常、ディスプレイ17aには、現在収集作業を行うステーション20の名前が候補として一番上に表示されることになる。
【0038】
次いで、S110に進み、現在位置のステーション20が、ディスプレイ17a中の一番上に表示されている名前のものと同一か否かを判断する。具体的には、操作ボタン17bの操作状況を基に、ディスプレイ17aの一番上に表示中のステーションと異なる他のステーションが選択されたか否かで判断する。そして、予め定めた時間が経過するまでの間に操作ボタン17bの操作によって他のステーションが選択された場合、S111に進み、その選択されたステーションを現在位置のステーションとして特定する。一方、操作ボタン17bによって他のステーションが選択されない場合には、現在位置のステーション20とディスプレイ17aの一番上に表示されている名前のものは同一であるとし、S112に進み、ディスプレイ17a中の一番上に表示中のステーションを現在位置のステーションとして特定する。
【0039】
尚、S111、或いは、S112においてステーションの特定が行われる前に車両が走行し始めた場合は、再度、S101からの処理を繰り返す。
【0040】
S111、或いは、S112においてステーションの特定が行われると、S113に進み、作業員による廃棄物の収集が行われる。
【0041】
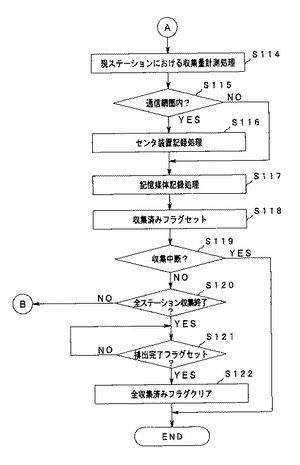
次いで、S114に進むと、後述の図5のフローチャートに示す、現ステーションにおける収集量計量処理が行われる。
【0042】
次に、S115に進み、車載器11は、現ステーション位置がデータ通信網Nの圏内であるかを判断し、通信可能であれば、S116に進んで、車載器11は、データ通信網Nを介して運行管理センタ1に収集履歴データ(日時情報、ステーション名、緯度・経度データ、収集廃棄物の計量結果(現在の積載総重量Mi、現ステーションにおける廃棄物の収集量ΔMi))等を送信する。そして、運行管理センタ1のセンタ装置1aでは、送信された車載器11の電話番号に基づいて塵芥収集車10を特定し、受信した収集履歴データを記録する。
【0043】
S116の後は、S117に進み、送信した収集履歴データを記憶媒体14に記録する。尚、その際には、運行管理センタ1に送信した上述の信号に加え、車載器固有の情報としての電話番号、データ通信圏識別フラグも記録される。
【0044】
また、S115の判定の結果、データ通信網Nの圏外と判定された場合、車載器11は、上述の信号を運行管理センタ1に送信せずに、S117に進んで、上述の信号を記憶媒体14に記録する。その際、データ通信圏識別フラグは圏外を示す状態で記録される。
【0045】
S117の後は、S118に進み、当該ステーションの収集済みフラグをセットし、S119に進む。
【0046】
S119に進むと、作業者により、何らかの理由(例えば、過積載等)で巡回中断の信号が操作盤17を介して入力されているか否か判断し、巡回中断の信号が入力されている場合には、そのまま処理を終了する。
【0047】
また、S119の判定の結果、巡回中断の信号が入力されていないのであれば、S120に進み、所定エリアA内の全てのステーション20を巡回したか否か判定され、全てのステーション20を巡回していないのであれば、再び、S101からの処理を繰り返し、全てのステーション20を巡回したのであれば、S121へと進む。
【0048】
そして、S120で、全てのステーションを巡回したと判定されてS121へと進むと、廃棄物処理場等で、積載してきた廃棄物の排出を行った際にセットされる排出完了フラグがセットされることの確認が作業者に対して繰り返し実行され、排出完了フラグがセットされた場合は、S122に進んで、全てのステーションの収集済みフラグをクリアして処理を終了する。
【0049】
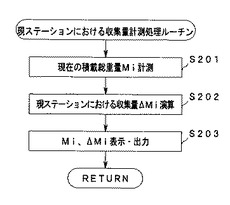
次に、図5は、上述のS114で実行される、現ステーションにおける収集量計測処理ルーチンのフローチャートを示す。このフローチャートは、自重計16の計量開始ボタン16bを押されると実行され、まず、S201で、自重計16は、現在の積載総重量Miを計測する。
【0050】
次に、S202に進み、自重計16は、現在の積載総重量Miから前回までの積載総重量を減算することにより、現ステーションにおける廃棄物の収集量ΔMiを演算する。
【0051】
そして、S203に進み、自重計16は、現在の積載総重量Mi、現ステーションにおける廃棄物の収集量ΔMiをディスプレイ16aに表示すると共に車載器11に出力し、車載器11は、プリンタ15に、現ステーションで収集した廃棄物の重量と、それに基づいて算出した請求金額等を所定用紙(請求書伝票)に印刷して、ルーチンを抜ける。
【0052】
尚、現ステーションにおいて収集すべき廃棄物が全く無い場合には、自重計16において、作業員の所定の操作により収集物が無い旨が入力され、計量開始ボタン16bが押される。これにより強制的に廃棄物重量が値0になされる。すなわち、廃棄物を車両に収集せずに計量開始ボタン16bを押した場合には、それまでに集積した廃棄物の総重量の経時変化等により、計量結果として値が0にならない虞があり、これを強制的に0とすることで誤請求等を防止することができる。
【0053】
このように、本発明の実施の形態によれば、車載器11は、塵芥収集車10が移動中の間は、GPS受信機12により測位した車両の緯度・経度データと所定エリアA内の全てのステーションの緯度・経度データを基に、これら各ステーションとの相対距離を演算する。そして、車両停車時には、停車地点における各ステーションとの相対距離を演算し、過去一定時間の範囲(例えば、停車するまでの3分間)で相対距離が連続して増加したステーションを第1種のステーションとして分類抽出し、また、収集済みフラグがセットされたステーションを第2種のステーションとして分類抽出し、更に、所定距離以内のステーションを第3種のステーションとして分類抽出して、該第3種のステーションとして抽出されたステーション群の中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成する。このため、ソートする際に不要なステーションが予め除外でき、可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示することが可能となる。
【0054】
尚、本実施の形態では、各ステーションと塵芥収集車10との相対距離を、単純な直線距離として説明しているが、各ステーションまでの道程距離としても良く、また、予め走行経路が設定されている場合には、この走行経路に沿った距離としても良い。
【0055】
更に、本実施の形態では、第1種のステーションを抽出するにあたり、過去一定時間の範囲で相対距離が連続して増加したステーションを第1種のステーションとして抽出するようになっているが、単純に、過去一定時間前の相対距離と現在における相対距離とを比較して、その値が増加している場合に第1種のステーションとして抽出するようにしても良い。
【0056】
また、本実施の形態では、塵芥収集車10の車載器11で上述のリスト作成処理を行うようになっているが、これらの演算は、運行管理センタ1側で実行することも可能である。
【図面の簡単な説明】
【0057】
【図1】塵芥収集車の運行管理システムの全体構成の概略説明図
【図2】運行管理システムの塵芥収集車における機能ブロック図
【図3】一台の塵芥収集車が廃棄物収集作業を行う工程を示すフローチャート
【図4】図3から続くフローチャート
【図5】現ステーションにおける収集量計測処理ルーチンのフローチャート
【図6】塵芥収集車とステーションとの相対距離の変化の一例を示す説明図
【符号の説明】
【0058】
1 運行管理センタ
1a センタ装置
1b センタ側通信部
1c 記録部
10 塵芥収集車
11 車載器(相対距離演算手段、増減傾向演算手段、リスト作成手段)
12 GPS受信機(車両位置測位手段)
13 データ通信機
14 記憶媒体(メモリ手段)
15 プリンタ
16 自重計
16a ディスプレイ
16b 計量開始ボタン
17 操作盤
17a ディスプレイ
17b 操作ボタン
18 車両情報出力手段
20 ステーション(廃棄物集積所)
30 GPS衛星
100 運行管理システム
A 所定エリア
N データ通信網
【技術分野】
【0001】
本発明は、複数の廃棄物集積所を巡回し廃棄物を収集する塵芥収集車の運行管理システムに関する。
【背景技術】
【0002】
一般に、店舗や企業等において生じる事業系一般廃棄物や一般家庭で生じる廃棄物(以下、単に廃棄物と称する)は、予め定められた廃棄物集積所(以下、ステーションと称する)に集められ、例えば、予め契約している廃棄物収集業者(以下、単に収集業者と称する)の塵芥収集車によって収集される。塵芥収集車は、通常、所定エリア内の膨大な数のステーションを定期的に巡回し、各ステーションにおいては、車両に同行する作業員が、収集した廃棄物を計量し、計量した重量に基づき請求書伝票等を作成している。
【0003】
例えば、特開2001−163403号公報では、緯度・経度で示される位置に設けられた廃棄物の収集場所のコンテナ装置に、廃棄物の重量を計測する装置と、計測した重量をセンタ装置に送信する送信装置とを設け、センタ装置で、塵芥収集車側で計測した残積載量と各収集場所からの廃棄物の重量とを比較して収集すべき次の収集場所情報を算出し、塵芥収集車に通知する技術が開示されている。
【特許文献1】特開2001−163403号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上述の特許文献1に開示されるような従来の塵芥収集車の運行管理システムでは、収集すべきステーションと収集の終わっていないステーションを単に自車位置から近い順にソートして作業員に提示するようになっている。しかしながら、特に都心部のようなステーションが多数存在するエリアでは、ソートするステーションの数も膨大となるため、上述のような単純に近い順にソートする技術では、演算負荷が大きくなり、素早く作業員に収集すべきステーションを提示できないという問題がある。また、多くのステーションが存在するため、これら全てを対象としたソートでは、目的のステーションを的確に絞り込むことができず、収集すべきステーションを正確に作業員に提示できなくなる虞もある。
【0005】
本発明は上記事情に鑑みてなされたもので、可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示することができる塵芥収集車の運行管理システムを提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明は、所定エリア内の複数の廃棄物集積所を巡回し廃棄物を収集する塵芥収集車の運行管理システムにおいて、上記塵芥収集車に設けられ、GPS衛星からの電波を受信し車両位置の緯度・経度を測位する車両位置測位手段と、上記所定エリア内の複数の廃棄物集積所の緯度・経度情報を記録したメモリ手段と、上記所定エリア内の複数の廃棄物集積所と上記塵芥収集車との相対距離を演算する相対距離演算手段と、上記相対距離演算手段で演算した各相対距離の増減傾向を演算する増減傾向演算手段と、少なくとも上記相対距離が増加傾向を示す廃棄物集積所を上記複数の廃棄物収集所から除外して、上記塵芥収集車が巡回する廃棄物集積所のリストを作成するリスト作成手段とを備えたことを特徴としている。
【発明の効果】
【0007】
本発明による塵芥収集車の運行管理システムによれば、可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示することが可能となる。
【発明を実施するための最良の形態】
【0008】
以下、図面に基づいて本発明の実施の形態を説明する。
図1〜図6は本発明の実施の一形態を示し、図1は塵芥収集車の運行管理システムの全体構成の概略説明図、図2は運行管理システムの塵芥収集車における機能ブロック図、図3は一台の塵芥収集車が廃棄物収集作業を行う工程を示すフローチャート、図4は図3から続くフローチャート、図5は現ステーションにおける収集量計測処理ルーチンのフローチャート、図6は塵芥収集車とステーションとの相対距離の変化の一例を示す説明図である。
【0009】
図1において、符号100は運行管理システムを示し、この運行管理システム100は、該システム100を管理する運行管理センタ1と、この運行管理センタ1の下で、所定エリアAを巡回し、複数のステーション20の廃棄物を収集する一台または複数台の塵芥収集車10とから主要に構成される。
【0010】
塵芥収集車10は、複数(例えば、4つ)のGPS(Global Positioning System)衛星30から定期的に電波を受信して現在の車両位置を測位し、その緯度・経度情報等の測位データを、データ通信網Nを介し、運行管理センタ1に送信する。
【0011】
運行管理センタ1においては、センタ装置1a(例えば、サーバシステム)が設けられ、このセンタ装置1aにより塵芥収集車10との通信制御がなされ、また、塵芥収集車10の作業に係るデータが一元管理されるように構成されている。すなわち、センタ装置1aは、塵芥収集車10から送信されたデータを受信するためのセンタ側通信部1bと、受信したデータを記録するための記録部1cとを備えている。
【0012】
塵芥収集車10は、図2に示すように、車両運転室であるキャビン10a内に車載器11を搭載し、この車載器11が周辺機器の動作を制御するように構成されている。
【0013】
キャビン10aにおいては、上述のGPS衛星30からの電波を受信し、車両の緯度・経度を測位する車両位置測位手段としてのGPS受信機12と、運行管理センタ1とデータ通信網Nを介して通信するためのデータ通信機13とが設けられ、それぞれ車載器11に接続されている。尚、データ通信網Nとしては、例えば既存の携帯電話網やインターネット網を適用することができ、データ通信の方式としてはパケット交換方式が好ましい。
【0014】
また、キャビン10aにおいて、車載器11には、各種データを記録し、電源供給がとぎれても記録内容が消滅しない記憶媒体(例えば、Compact Flash(登録商標)カード等の不揮発メモリ)14とプリンタ15とが接続されている。尚、記憶媒体14は、抜き差し自在であり、運行管理センタ1のセンタ装置1aによってもデータの読み出し、及び、書き込みが可能になっている。
【0015】
記憶媒体14には、所定エリアA内の全てのステーション情報(ステーション名(集積所名)、緯度・経度データ等)がステーションリスト(全体リスト)として予め記録され、更に収集作業の度に収集履歴データが記録されるようになっている。すなわち、記憶媒体14は、メモリ手段として設けられている。
【0016】
また、上述の収集履歴データとは、日時情報、収集した廃棄物の計量結果、緯度・経度データ(上述の平均値)、ステーション名、車載器11固有の情報としての電話番号、データ通信網Nの圏内か否かを識別するフラグ(データ通信圏識別フラグ)等である。尚、全体リストは、緯度又は経度を基準としてソートした状態で記憶されている。
【0017】
収集履歴データの車載器11の電話番号は、運行管理センタ1において、管理すべき収集履歴データがどの車載器11(塵芥収集車10)のものであるのかを特定するのに用いられる。すなわち、例えば、複数の塵芥収集車10から持ち込まれた複数の記憶媒体14が、どの車載器11のものであるのかを、それぞれ特定する場合に、その中に記録された電話番号データを参照することにより容易に特定することができる。
【0018】
また、収集履歴データのデータ通信圏識別フラグは、塵芥収集車10による所定エリアAの巡回が終了し、運行管理センタ1のセンタ装置1aによって記憶媒体14の内容が読み出された際に、どのステーション20が通信圏外で通信できず、収集履歴の更新がなされていないのかを選別するために用いられる。
【0019】
更に、プリンタ15は、各ステーション20において収集した廃棄物の重量と、その重量に基づき換算した請求額とを印字し、請求書として出力するために設けられている。
【0020】
車両後部10bには、それまでに集積した廃棄物の総重量(現在の積載総重量)Miと、各ステーションで収集した廃棄物の重量(各ステーションにおける廃棄物の収集量)ΔMiを計量することが可能な自重計16が設けられている。具体的には、ステーションにおいて廃棄物の収集が行われ、自重計16による計測が行われると、現在の積載総重量Miを計測し、この現在の積載総重量Miから前回までの積載総重量を減算することにより、現ステーションにおける廃棄物の収集量ΔMiが演算される。
【0021】
そして、自重計16は、計量した重量値を表示するディスプレイ16aと、計量開始とプリンタ15での印刷開始とを指示するための計量開始ボタン16bとを有している。
【0022】
また、自重計16は、車載器11と接続され、計量開始ボタン16bを押すことにより、計量結果が日時情報、ステーション名、緯度・経度データ等と共に、収集履歴データとして記憶媒体14に記録され、同時にデータ通信機13により運行管理センタ1に送信される。尚、計量結果が記憶媒体14に記録される際には、車載器固有の情報としての電話番号、データ通信圏識別フラグも収集履歴データとして同時に記録される。
【0023】
すなわち、各ステーション20において清掃作業員が廃棄物を収集し、計量開始ボタン16bを押すことにより計量が開始され、計量結果である廃棄物重量、それに基づく請求金額等がプリンタ15で印刷される。また同時に、収集した廃棄物の重量を含む収集履歴データが記憶媒体14に記録され、データ通信可能であれば運行管理センタ1に送信される。
【0024】
また、車両後部10bには、操作盤17が設けられている。この操作盤17は、車両周辺の複数(例えば、3箇所)のステーション名を表示するためのディスプレイ17aと、表示されたステーション名のリスト(このリストについては後述する)の中から作業員が現在のステーションを選択し、特定するための操作ボタン17bとを有している。
【0025】
この操作盤17は、車載器11に接続され、操作ボタン17bの操作により選択されたステーション名が現在収集作業を行うステーション(現ステーション)20の名前として特定され、車載器11に出力される。こうして、操作盤17で作業員により選択されたステーション名は、収集履歴データ中のステーション名としてプリンタ15、記憶媒体14、運行管理センタ1に出力される。
【0026】
ここで、上述のディスプレイ17aに表示されるリストの作成について説明する。
車載器11は、塵芥収集車10が移動中の間は、GPS受信機12により測位した車両の緯度・経度データと所定エリアA内の全てのステーションの緯度・経度データを基に、これら各ステーションとの相対距離(例えば、単純な直線距離)を演算する。そして、車両停車時には、停車地点における各ステーションとの相対距離を上述と同様に演算し、過去一定時間の範囲(例えば、停車するまでの3分間)で相対距離が連続して増加したステーションを第1種のステーションとして分類抽出する。また、収集済みフラグ(廃棄物の収集の際に作業員により操作ボタン17bで特定され、且つ、計量開始ボタン16bが押された際に該当のステーションに対してセットされるフラグ)がセットされたステーションを第2種のステーションとして分類抽出する。更に、所定距離以内のステーションを第3種のステーションとして分類抽出し、該第3種のステーションとして抽出されたステーション群の中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成する。尚、上述の収集済みフラグは、塵芥収集車10が廃棄物の収集を終えて、例えば、廃棄物処理場等で、積載してきた廃棄物の排出を行った際(この際には排出完了フラグが自動的にセットされる)には、全ての収集済みフラグがクリアされる。
【0027】
すなわち、車載器11は、相対距離演算手段、増減傾向演算手段、及び、リスト作成手段としての機能を有している。
【0028】
また、作業員が、収集作業を中断し、各ステーションの巡回を中断する場合は、上述の操作ボタン17bが押され、中断したことを示す信号が記憶媒体14、運行管理センタ1に出力される。
【0029】
更に、塵芥収集車10には、車両情報出力手段18が設けられ、車載器11には、この車両情報出力手段18から、車速情報、サイドブレーキ情報、エンジン回転数等の車両情報が入力される。そして、車載器11は、車両情報出力手段18からの車両情報に基づいて、車両が停車したか否かを判断する。
【0030】
次に、上述のように構成された運行管理システム100において、一台の塵芥収集車10が所定エリアAを巡回し、廃棄物収集作業を行う工程の一例を、図3、図4のフローチャートに基づいて説明する。
【0031】
まず、ステップ(以下、「S」と略称)101では、車載器11は、GPS受信機12によりGPS測位を行い、得られた車両の緯度・経度の測位データを、データ通信網Nを介して運行管理センタ1のセンタ装置1aに送信する。これにより、運行管理センタ1では、各塵芥収集車10がどの地点にいるのか常時把握できる。
【0032】
次に、S102に進み、車載器11は、GPS受信機12により測位した車両の緯度・経度データと記憶媒体14の所定エリアA内の全てのステーションの緯度・経度データを基に、これら各ステーションとの相対距離(例えば、単純な直線距離)を演算する。
【0033】
次いで、S103に進み、車載器11は、車両情報出力手段18からの入力情報に基づいて車両が停車したか否か判定し、車両が停車していないのであれば、S101からの処理を繰り返し、車両が停車しているのであれば、S104に進んで、その地点の測位を行い、S105に進んで、停車地点における各ステーションとの相対距離を演算する。
【0034】
次に、S106に進み、車載器11は、過去一定時間の範囲(例えば、停車するまでの3分間)で塵芥収集車10との相対距離が連続して増加したステーションを第1種のステーションとして分類抽出する。例えば、図6に示すように、過去一定時間tc(本実施の形態では3分間)の間で、ステーションSTAは、塵芥収集車10との相対距離は連続して減少しているが、ステーションSTBは、連続して増加している。従って、ステーションSTBは、第1種のステーションとして抽出されることになる。尚、図6中、時間trは、車両が停車した時刻を示す。
【0035】
次いで、S107に進み、車載器11は、収集済みフラグ(廃棄物の収集の際に作業員により操作ボタン17bで特定され、且つ、計量開始ボタン16bが押された際に該当のステーションに対してセットされるフラグ)がセットされたステーションを第2種のステーションとして分類抽出する。
【0036】
次に、S108に進むと、車載器11は、塵芥収集車10から所定距離以内のステーションを第3種のステーションとして分類抽出する。
【0037】
次いで、S109に進んで、車載器11は、第3種のステーションとして抽出されたステーション群の中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成し、操作盤17のディスプレイ17aに表示する。以上の処理により、通常、ディスプレイ17aには、現在収集作業を行うステーション20の名前が候補として一番上に表示されることになる。
【0038】
次いで、S110に進み、現在位置のステーション20が、ディスプレイ17a中の一番上に表示されている名前のものと同一か否かを判断する。具体的には、操作ボタン17bの操作状況を基に、ディスプレイ17aの一番上に表示中のステーションと異なる他のステーションが選択されたか否かで判断する。そして、予め定めた時間が経過するまでの間に操作ボタン17bの操作によって他のステーションが選択された場合、S111に進み、その選択されたステーションを現在位置のステーションとして特定する。一方、操作ボタン17bによって他のステーションが選択されない場合には、現在位置のステーション20とディスプレイ17aの一番上に表示されている名前のものは同一であるとし、S112に進み、ディスプレイ17a中の一番上に表示中のステーションを現在位置のステーションとして特定する。
【0039】
尚、S111、或いは、S112においてステーションの特定が行われる前に車両が走行し始めた場合は、再度、S101からの処理を繰り返す。
【0040】
S111、或いは、S112においてステーションの特定が行われると、S113に進み、作業員による廃棄物の収集が行われる。
【0041】
次いで、S114に進むと、後述の図5のフローチャートに示す、現ステーションにおける収集量計量処理が行われる。
【0042】
次に、S115に進み、車載器11は、現ステーション位置がデータ通信網Nの圏内であるかを判断し、通信可能であれば、S116に進んで、車載器11は、データ通信網Nを介して運行管理センタ1に収集履歴データ(日時情報、ステーション名、緯度・経度データ、収集廃棄物の計量結果(現在の積載総重量Mi、現ステーションにおける廃棄物の収集量ΔMi))等を送信する。そして、運行管理センタ1のセンタ装置1aでは、送信された車載器11の電話番号に基づいて塵芥収集車10を特定し、受信した収集履歴データを記録する。
【0043】
S116の後は、S117に進み、送信した収集履歴データを記憶媒体14に記録する。尚、その際には、運行管理センタ1に送信した上述の信号に加え、車載器固有の情報としての電話番号、データ通信圏識別フラグも記録される。
【0044】
また、S115の判定の結果、データ通信網Nの圏外と判定された場合、車載器11は、上述の信号を運行管理センタ1に送信せずに、S117に進んで、上述の信号を記憶媒体14に記録する。その際、データ通信圏識別フラグは圏外を示す状態で記録される。
【0045】
S117の後は、S118に進み、当該ステーションの収集済みフラグをセットし、S119に進む。
【0046】
S119に進むと、作業者により、何らかの理由(例えば、過積載等)で巡回中断の信号が操作盤17を介して入力されているか否か判断し、巡回中断の信号が入力されている場合には、そのまま処理を終了する。
【0047】
また、S119の判定の結果、巡回中断の信号が入力されていないのであれば、S120に進み、所定エリアA内の全てのステーション20を巡回したか否か判定され、全てのステーション20を巡回していないのであれば、再び、S101からの処理を繰り返し、全てのステーション20を巡回したのであれば、S121へと進む。
【0048】
そして、S120で、全てのステーションを巡回したと判定されてS121へと進むと、廃棄物処理場等で、積載してきた廃棄物の排出を行った際にセットされる排出完了フラグがセットされることの確認が作業者に対して繰り返し実行され、排出完了フラグがセットされた場合は、S122に進んで、全てのステーションの収集済みフラグをクリアして処理を終了する。
【0049】
次に、図5は、上述のS114で実行される、現ステーションにおける収集量計測処理ルーチンのフローチャートを示す。このフローチャートは、自重計16の計量開始ボタン16bを押されると実行され、まず、S201で、自重計16は、現在の積載総重量Miを計測する。
【0050】
次に、S202に進み、自重計16は、現在の積載総重量Miから前回までの積載総重量を減算することにより、現ステーションにおける廃棄物の収集量ΔMiを演算する。
【0051】
そして、S203に進み、自重計16は、現在の積載総重量Mi、現ステーションにおける廃棄物の収集量ΔMiをディスプレイ16aに表示すると共に車載器11に出力し、車載器11は、プリンタ15に、現ステーションで収集した廃棄物の重量と、それに基づいて算出した請求金額等を所定用紙(請求書伝票)に印刷して、ルーチンを抜ける。
【0052】
尚、現ステーションにおいて収集すべき廃棄物が全く無い場合には、自重計16において、作業員の所定の操作により収集物が無い旨が入力され、計量開始ボタン16bが押される。これにより強制的に廃棄物重量が値0になされる。すなわち、廃棄物を車両に収集せずに計量開始ボタン16bを押した場合には、それまでに集積した廃棄物の総重量の経時変化等により、計量結果として値が0にならない虞があり、これを強制的に0とすることで誤請求等を防止することができる。
【0053】
このように、本発明の実施の形態によれば、車載器11は、塵芥収集車10が移動中の間は、GPS受信機12により測位した車両の緯度・経度データと所定エリアA内の全てのステーションの緯度・経度データを基に、これら各ステーションとの相対距離を演算する。そして、車両停車時には、停車地点における各ステーションとの相対距離を演算し、過去一定時間の範囲(例えば、停車するまでの3分間)で相対距離が連続して増加したステーションを第1種のステーションとして分類抽出し、また、収集済みフラグがセットされたステーションを第2種のステーションとして分類抽出し、更に、所定距離以内のステーションを第3種のステーションとして分類抽出して、該第3種のステーションとして抽出されたステーション群の中から第1種、第2種のステーションを除外し、自車位置から近い順にソートしてリストを作成する。このため、ソートする際に不要なステーションが予め除外でき、可能な限り演算負荷を小さくして、素早く、且つ、正確に、収集すべきステーションを作業員に提示することが可能となる。
【0054】
尚、本実施の形態では、各ステーションと塵芥収集車10との相対距離を、単純な直線距離として説明しているが、各ステーションまでの道程距離としても良く、また、予め走行経路が設定されている場合には、この走行経路に沿った距離としても良い。
【0055】
更に、本実施の形態では、第1種のステーションを抽出するにあたり、過去一定時間の範囲で相対距離が連続して増加したステーションを第1種のステーションとして抽出するようになっているが、単純に、過去一定時間前の相対距離と現在における相対距離とを比較して、その値が増加している場合に第1種のステーションとして抽出するようにしても良い。
【0056】
また、本実施の形態では、塵芥収集車10の車載器11で上述のリスト作成処理を行うようになっているが、これらの演算は、運行管理センタ1側で実行することも可能である。
【図面の簡単な説明】
【0057】
【図1】塵芥収集車の運行管理システムの全体構成の概略説明図
【図2】運行管理システムの塵芥収集車における機能ブロック図
【図3】一台の塵芥収集車が廃棄物収集作業を行う工程を示すフローチャート
【図4】図3から続くフローチャート
【図5】現ステーションにおける収集量計測処理ルーチンのフローチャート
【図6】塵芥収集車とステーションとの相対距離の変化の一例を示す説明図
【符号の説明】
【0058】
1 運行管理センタ
1a センタ装置
1b センタ側通信部
1c 記録部
10 塵芥収集車
11 車載器(相対距離演算手段、増減傾向演算手段、リスト作成手段)
12 GPS受信機(車両位置測位手段)
13 データ通信機
14 記憶媒体(メモリ手段)
15 プリンタ
16 自重計
16a ディスプレイ
16b 計量開始ボタン
17 操作盤
17a ディスプレイ
17b 操作ボタン
18 車両情報出力手段
20 ステーション(廃棄物集積所)
30 GPS衛星
100 運行管理システム
A 所定エリア
N データ通信網
【特許請求の範囲】
【請求項1】
所定エリア内の複数の廃棄物集積所を巡回し廃棄物を収集する塵芥収集車の運行管理システムにおいて、
上記塵芥収集車に設けられ、GPS衛星からの電波を受信し車両位置の緯度・経度を測位する車両位置測位手段と、
上記所定エリア内の複数の廃棄物集積所の緯度・経度情報を記録したメモリ手段と、
上記所定エリア内の複数の廃棄物集積所と上記塵芥収集車との相対距離を演算する相対距離演算手段と、
上記相対距離演算手段で演算した各相対距離の増減傾向を演算する増減傾向演算手段と、
少なくとも上記相対距離が増加傾向を示す廃棄物集積所を上記複数の廃棄物収集所から除外して、上記塵芥収集車が巡回する廃棄物集積所のリストを作成するリスト作成手段と、
を備えたことを特徴とする塵芥収集車の運行管理システム。
【請求項2】
上記リスト作成手段は、上記塵芥収集車が停車した際に停車位置近傍の上記塵芥収集車が巡回する廃棄物集積所のリストを作成するものであって、
上記増減傾向演算手段は、停車前の予め設定した時間における上記各相対距離の増減傾向を演算することを特徴とする請求項1記載の塵芥収集車の運行管理システム。
【請求項3】
上記リスト作成手段は、上記塵芥収集車の位置から近い順にソートして上記塵芥収集車が巡回する廃棄物集積所のリストを作成することを特徴とする請求項1又は請求項2記載の塵芥収集車の運行管理システム。
【請求項1】
所定エリア内の複数の廃棄物集積所を巡回し廃棄物を収集する塵芥収集車の運行管理システムにおいて、
上記塵芥収集車に設けられ、GPS衛星からの電波を受信し車両位置の緯度・経度を測位する車両位置測位手段と、
上記所定エリア内の複数の廃棄物集積所の緯度・経度情報を記録したメモリ手段と、
上記所定エリア内の複数の廃棄物集積所と上記塵芥収集車との相対距離を演算する相対距離演算手段と、
上記相対距離演算手段で演算した各相対距離の増減傾向を演算する増減傾向演算手段と、
少なくとも上記相対距離が増加傾向を示す廃棄物集積所を上記複数の廃棄物収集所から除外して、上記塵芥収集車が巡回する廃棄物集積所のリストを作成するリスト作成手段と、
を備えたことを特徴とする塵芥収集車の運行管理システム。
【請求項2】
上記リスト作成手段は、上記塵芥収集車が停車した際に停車位置近傍の上記塵芥収集車が巡回する廃棄物集積所のリストを作成するものであって、
上記増減傾向演算手段は、停車前の予め設定した時間における上記各相対距離の増減傾向を演算することを特徴とする請求項1記載の塵芥収集車の運行管理システム。
【請求項3】
上記リスト作成手段は、上記塵芥収集車の位置から近い順にソートして上記塵芥収集車が巡回する廃棄物集積所のリストを作成することを特徴とする請求項1又は請求項2記載の塵芥収集車の運行管理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−303034(P2008−303034A)
【公開日】平成20年12月18日(2008.12.18)
【国際特許分類】
【出願番号】特願2007−151996(P2007−151996)
【出願日】平成19年6月7日(2007.6.7)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成20年12月18日(2008.12.18)
【国際特許分類】
【出願日】平成19年6月7日(2007.6.7)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]