
壁走行装置
【課題】 吸着力を確保し、地上のポンプなどとの間のホースを必要としない走行装置を提供する。
【手段】 壁面走行装置は、ポンプモータ36aによって吸着パッドを吸着する。その際、CPU72aは、ポンプの負荷電流を監視する。負荷電流が所定値を超えていれば、吸着が成功したと判断し、そうでなければ吸着が不十分であると判断する。所定時間が経過すると、再度、上記の吸着処理を繰り返す。
【手段】 壁面走行装置は、ポンプモータ36aによって吸着パッドを吸着する。その際、CPU72aは、ポンプの負荷電流を監視する。負荷電流が所定値を超えていれば、吸着が成功したと判断し、そうでなければ吸着が不十分であると判断する。所定時間が経過すると、再度、上記の吸着処理を繰り返す。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、建物などの壁を自走して、検査や補修などを行う走行装置に関するものである。
【背景技術】
【0002】
建物の外壁などの検査や補修を行うためには、作業員が作業を行うための足場を組む必要があり、時間や費用を要していた。この問題を解決するために、壁面を自走する装置の提案がなされている。たとえば、中空のローラに多数の孔を設け、ローラ内の空気を吸気することにより、壁面に吸い付きながら走行する装置が提案されている。
【0003】
また、特許文献1には、真空吸着パッドによって壁面を走行する装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−238306
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、中空ローラを用いた装置では、吸着のためのポンプが大型であり、走行装置とは別に、地上にポンプを設けなければならなかった。このため、地上のポンプと走行装置をつなぐホースが必要であり、走行装置の自由な走行が妨げられていた。また、ローラに多数の穴を開けて吸着する構造であるため、吸着力が十分でないという問題もあった。
【0006】
また、特許文献1の装置では、真空パッドによる吸着が確実に行われずに、装置が落下するおそれがあった。また、地上にポンプを設けなければならなかった。
【0007】
この発明は、上記のような問題点を解決して、吸着力を確保し、地上のポンプなどとの間のホースを必要としない走行装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)この発明による壁面走行装置は、駆動部によって回転させられる履帯と、履帯に設けられ、吸気によって吸着を行う複数の吸着部と、吸着部の吸気および排気を行う吸気排気部と、吸気排気部を制御する制御手段とを備えた壁走行装置であって、前記制御手段は、履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、吸気排気部の駆動力を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段とを備えたことを特徴としている。
【0009】
したがって、壁面への吸着状態を確認しつつ、走行を行うことができる。
【0010】
(2)この発明による壁面走行装置は、駆動部によって回転させられる履帯と、履帯に設けられ、吸気によって吸着を行う複数の吸着部と、吸着部の吸気および排気を行う吸気排気部と、吸気排気部を制御する制御手段とを備えた壁走行装置であって、前記吸気排気部は、非接続通気口と接続通気口を備え、モータによってピストンの往復運動を行う第1のポンプと、非接続通気口と接続通気口を備え、モータによって、第1のポンプのピストンと逆となるようにピストンの往復運動を行う第2のポンプと、前記第1のポンプの接続通気口と前記第2のポンプの接続通気口を連通させる連通管と、連通管と複数の吸着部とを接続する接続管とを備えており、前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開き、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じることによって、吸着部に対して吸気を行うように制御し、前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じ、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開くことによって、吸着部に対して排気を行うように制御することを特徴としている。
【0011】
したがって、効率的に、吸気と排気を行うことができる。
【0012】
(3)この発明の壁走行装置は、前記制御手段は、履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、吸気排気部のモータの電流を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段とを備えたことを特徴としている。
【0013】
したがって、壁面への吸着状態を確認しつつ、走行を行うことができる。
【0014】
(4)この発明の壁走行装置は、制御手段は、接続管と吸着部の開閉を制御することにより、特定の吸着部に対して、吸気または排気を行うことを特徴としている。
【0015】
したがって、1つの吸気排気部によって複数の吸着部に対し、吸気と排気を行うことができる。
【0016】
(5)この発明の壁走行装置は、制御手段は、吸着部が壁面に接している間、所定間隔で吸気制御手段と吸着確認手段による動作を繰り返すことを特徴としている。
【0017】
したがって、より確実に、壁面に対する吸着を行うことができる。
【0018】
(6)この発明の壁走行装置は、壁面の検査データを取得する取得手段と、当該取得した検査データを、地上の検査データ解析のためのコンピュータに送信する検査データ送信手段とを備えている。
【0019】
したがって、壁走行装置によってデータを取得し、地上のコンピュータによって解析を行うことができる。
【0020】
(7)この発明のシステムは、壁走行装置と、地上制御装置を備えたシステムであって、
前記壁走行装置は、駆動部によって回転させられる2つの履帯と、履帯に設けられ、吸気によって吸着を行う複数の吸着部と、吸着部の吸気および排気を行う吸気排気部と、吸気排気部を制御するとともに、2つの履帯を駆動する駆動部を制御して進行方向を制御する制御手段と、位置検出用の放射を受けて自らの位置を検出する装置位置検出手段とを備えた壁走行装置とを備え、
前記地上制御装置は、予め定められた壁走行装置の走行ルートを記録する記録部と、装置位置検出手段によって検出された壁走行装置の位置と、記録された走行ルートとに基づいて、壁走行装置の制御手段に対して、走行方向を指示する走行方向指示部とを備えている。
【0021】
したがって、壁走行装置は、定められたルートにつき自らの位置を修正しながら進むことができる。
【図面の簡単な説明】
【0022】
【図1】この発明の一実施形態による壁走行装置2の外観図である。
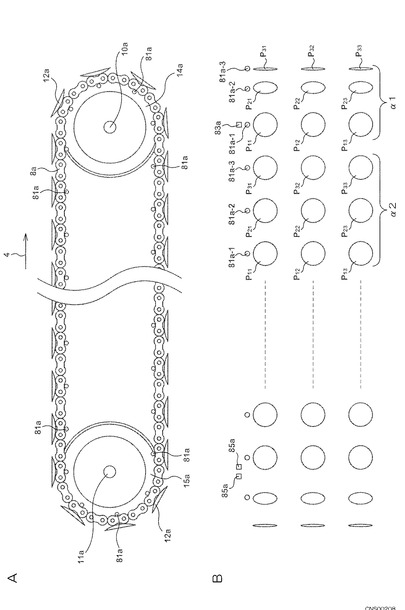
【図2】履帯8aと吸着パッド位置センサ81aとマグネット83a、85aの関係を示す図である。
【図3】吸着パッド12aを示す図である。
【図4】ポンプ部26付近の構造を示す図である。
【図5】ポンプ部26の内部構造を示す図である。
【図6】全体の回路構成を示す図である。
【図7】子制御回路70aのハードウエア構成である。
【図8】子制御回路70aの動作を説明するための図である。
【図9】吸着制御プログラム87aのフローチャートである。
【図10】吸着制御プログラム87aのフローチャートである。
【図11】吸着対象フラグの例である。
【図12】吸着処理の詳細を示す図である。
【図13】吸着パッド12aの吸着が成功したか失敗したかを示す記録である。
【図14】廃棄処理のフローチャートである。
【図15】親制御回路20のハードウエア構成である。
【図16】制御プログラム95のフローチャートである。
【図17】検査装置の例である。
【発明を実施するための形態】
【0023】
1.壁走行装置の外観および機械的構造
1.1外観および履帯の構造
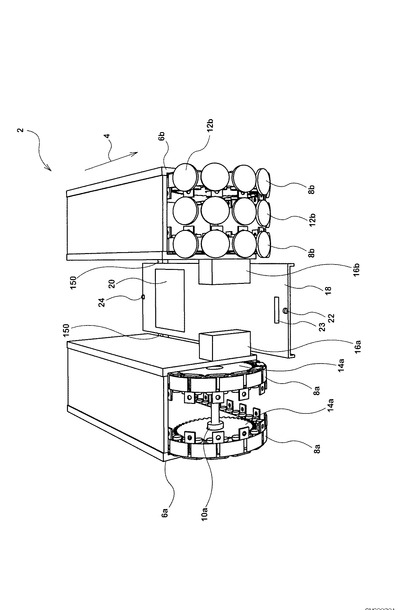
図1に、この発明の一実施形態による壁走行装置2の外観を示す。壁走行装置2の前進進行方向4に向かって左右に、履帯シャーシ6a、6bが設けられている。履帯シャーシ6a、6bの中には、それぞれ、一対の履帯8a、8aおよび8b、8bが設けられており、履帯シャーシ6a、6bの底面は開放されており、履帯8a、8aおよび8b、8bが露出するようになっている。
【0024】
一対の履帯8a、8aおよび8b、8bの外周には、それぞれ、吸着パッド12a、12bが設けられている。なお、図1においては、内部構造を説明するため、進行方向右側の吸着パッド12aは、図示していない。
【0025】
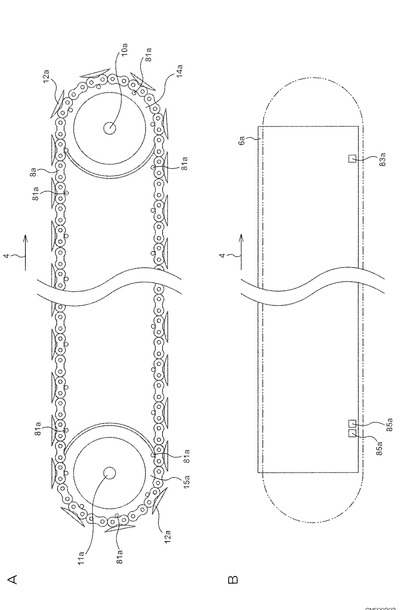
以下、進行方向右側の履帯8a、8aについて、その構造を説明する。一対の履帯8a、8aは、連結軸10aによって連結された一対の回転板14a、14aに係合されている。回転板14a、14aの外周には、歯車が設けられており、これにより履帯8a、8aと係合がなされている。連結軸10aは、履帯シャーシ6aの側壁に、ベアリングにより回転可能に軸支されている。なお、図2Aに示すように、前進進行方向4に関しての前方端だけでなく、後方端にも、同様の回転板15a、15aが設けられている。
【0026】
履帯8a、8aは、前方端の回転板14a、14aと、後方端の回転板15a、15aとの間に張架され、これら回転板14a、14a、15a、15aに係合されている。図1に示すように、前方端の回転板14a、14aの回転軸10aには、ギア(図示せず)を介してモータ16aが接続されている。したがって、モータ16aが回転すると、履帯8a、8aおよび吸着パッド12aも回転し、前方端の回転板14a、14aと後方端の回転板15a、15aの間の吸着パッド12aが移動することになる。このようにして、無限軌道が形成されている。なお、モータ16aは、履帯シャーシ6aに装着されている。
【0027】
また、進行方向左側の履帯8b、8bも上記と同じ構造により、無限軌道とされている。
【0028】
左右の履帯シャーシ6a、6bの間には、本体基板18が設けられている。本体基板18は、4カ所に設けられたゴムブッシュ150を介して、履帯シャーシ6a、6bに取り付けられている。図1においては、後方端の回転板15a、15bの近傍に設けられたゴムブッシュ150のみを示しているが、前方端の回転板14a、14bの近傍にも設けられている。
【0029】
ゴムブッシュ150を設けることにより、壁走行装置2が左右に曲がって進行する場合などにおいても、余裕を持つことができる。
【0030】
本体基板18上には、親制御回路20、前方障害物センサ22、後方障害物センサ24、検査装置や補修装置(図示せず)が搭載されている。
【0031】
1.2吸着機構
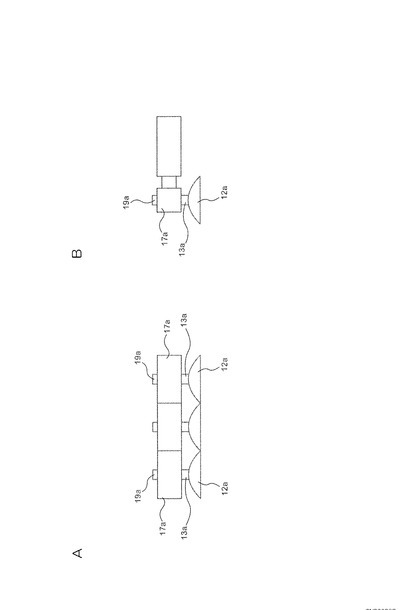
図3に、吸着パッド12a近傍の構造を示す。この実施形態では、一列に3つの吸着パッド12aが設けられている。図3Aは正面から見た図であり、図3Bはその側面図である。
【0032】
吸着パッド12aは、吸引部13aから吸引を行うことで、その吸着力を高めることが可能に構成されている(真空吸着パッド)。吸引部13aは、電磁弁17aを介して、接続口19aに接続されている。電磁弁17aを開くと、吸引部13aと接続口19aが連通し、電磁弁17bを閉じると、連通が遮断される。接続口19aには、後述のようにポンプが接続されるので、電磁弁17aを開いて、ポンプで吸引を行うことにより、吸着力を高めることができる。
【0033】
なお、上記では、右側の吸着パッド12aについて説明したが、左側の吸着パッド12bについても同様の構造となっている。
【0034】
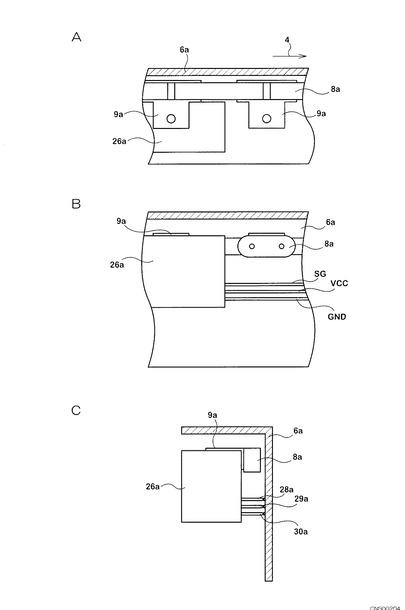
図4に、ポンプ部26の取り付け構造を示す。ポンプ部26は、履帯8aに設けられたステー9aによって、履帯8aに固定されている。したがって、ポンプ部26は、履帯8aとともに移動・回転する。
【0035】
図4Aは、履帯シャーシ16aの上部を取り除いた場合の平面図である。図4Aに現れている履帯シャーシ16aの側壁は、本体基板18に近い側の側壁である。
【0036】
図4Bは、正面図である。履帯シャーシ16aの側壁には、ポンプ部26に電源を供給するための、電源ラインVCC、グランドラインGNDが設けられている。また、信号をやりとりするための信号ラインSGも設けられている。なお、図においては、信号ラインSGは1本だけとしているが、用いる通信規格に応じて、必要本数を設ける必要がある。これらのラインは、メッキや印刷などによって形成することができる。
【0037】
図4Cの側面図に示すように、ポンプ部26aと電源ラインVCC、グランドラインGND、信号ラインSGとの間の接続には、摺動接触子28a、29a、30aが用いられる。したがって、ポンプ部26aが移動しても、各ラインとの接触が保たれる。
【0038】
この実施形態においては、ポンプ部26aは、3列の吸着パッド12a(つまり、3×3=9個)に対して1つ設けられている。
【0039】
なお、左側の履帯8bに対しても、同様の構造のポンプ部26bが設けられている。
【0040】
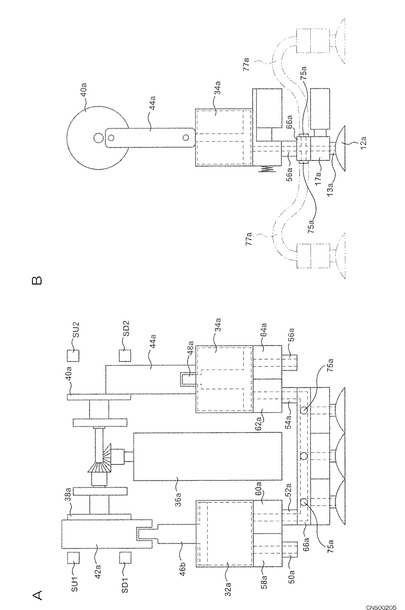
図5に、ポンプ部26aに収納されたポンプの構造を示す。図5Aが正面図、図5Bが側面図である。第1のポンプ32aおよび第2のポンプ34aが設けられている。ポンプモータ36aが回転すると、スライダ板38a、40aが回転する。スライダ板38a、40aには、ジョイント42a、44aの一端が接続されている。また、ジョイント42a、44aの他端には、シャフト46a、48aが接続されている。
【0041】
したがって、スライダ板38a、40aが回転すると、第1のポンプ32a、第2のポンプ34aのピストンが上下することになる。なお、図5に示すように、第1のポンプ32aのピストンと第2のポンプ34aのピストンは、180度の位相差を持って上下する。
【0042】
なお、第1のポンプ32aのピストンと第2のポンプ34aのピストンの位置は、上センサSU1、下センサSD1、上センサSU2、下センサSD2によって検出することができる。センサとしては、近接センサなどを用いることができる。
【0043】
第1のポンプ32aには、非接続通気口50aと接続通気口52aが設けられている。非接続通気口50aには電磁弁58aが設けられ、接続通気口52aには電磁弁60aが設けられている。電磁弁58a、60aの開閉を制御することにより、いずれの通気口50a、52aから吸気するか(排気するか)を切り換えることができる。たとえば、ピストンが上方向に移動する際に、電磁弁58aを閉じ、電磁弁60aを開くと、接続通気口52aから吸気が行われることになる。
【0044】
第2のポンプ34aには、接続通気口54aと非接続通気口56aが設けられている。接続通気口54aには電磁弁62aが設けられ、非接続通気口56aには電磁弁64aが設けられている。電磁弁62a、64aの開閉を制御することにより、いずれの通気口54a、56aから吸気するか(排気するか)を切り換えることができる。
【0045】
第1のポンプ32aの接続通気口52aと第2のポンプ34aの接続通気口54aは、連通管66aによって連通されている。連通管66aには、図3に示す吸着パッド12aおよび電磁弁17aが接続されている。図5Aに示すように、3つの電磁弁17aおよび吸着パッド12aが、連通管66aに直接接続されている。
【0046】
前述のように、この実施形態では、1つのポンプ部26aにより、9個の吸着パッド12aの吸排気を処理するようにしている。つまり、図5Aに示す3つの吸着パッド12aだけでなく、図5Bに示すように、前後6つの吸着パッド12aについても吸排気を処理するようにしている。そこで、図5Bに示すように、連通管66aの前後には、3つずつ合計6個の通気口75aが設けられている。これらの通気口75aは、チューブ77aによっって、前後の吸着パッド12aの電磁弁17aの接続口19aに接続される。
【0047】
したがって、この実施形態では、1つのポンプ部26aによって、9個の吸着パッド12aに対して、吸着・排気を行うことができる。
【0048】
たとえば、吸着パッド12aに対して吸気を行う場合には、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)に、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。さらに、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)に、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。このようにすることで、連続的に吸気を行うことができる。
【0049】
また、吸着パッド12aに対して排気を行う場合には、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)に、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。さらに、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)に、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。このようにすることで、連続的に排気を行うことができる。
【0050】
なお、図示していないが、ポンプ部26aには、子制御回路も収納されている。
【0051】
2.子制御回路
2.1子制御回路のハードウエア構成
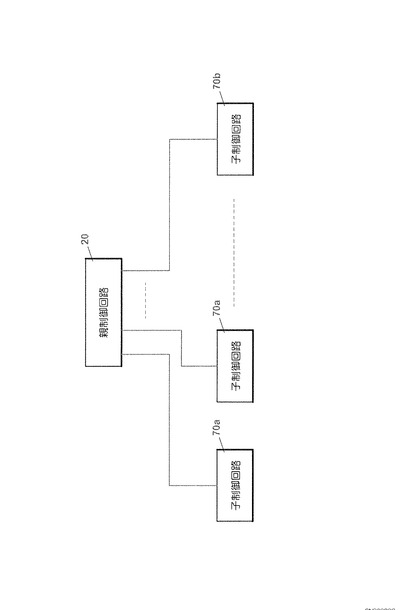
図6に、回路構成を示す。本体基板18に設けられた親制御回路20と、左右の履帯8a、8bに設けられた子制御回路70a、70bは、信号ラインSG(図4参照)を介して接続されている。
【0052】
子制御回路70a、70bは、担当する吸着パッド12a、12bの吸着制御を行う。親制御回路20は、装置全体の走行制御や、吸着パッド12a、12b全体の吸着状態の監視などを行う。
【0053】
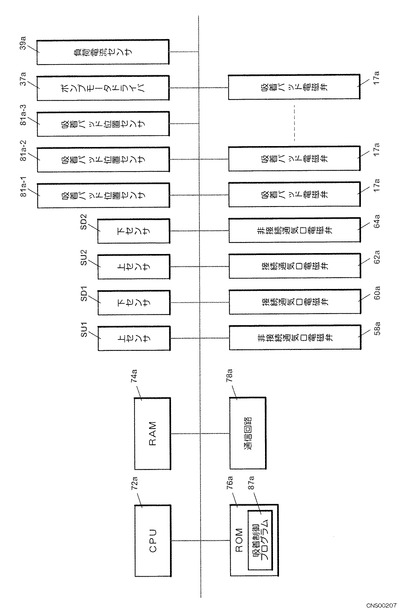
図7に、子制御回路70aのハードウエア構成を示す。CPU72aには、RAM74a、ROM76a、通信回路78aが接続されている。ROM76aには、吸着制御プログラム87aが記録されている。通信回路78aは、信号ラインSGを介して、親制御回路20と通信を行うためのものである。
【0054】
また、第1のポンプ32aに設けられた上センサSU1、下センサSD1、非接続通気口電磁弁58a、接続通気口電磁弁60a、第2のポンプ34aに設けられた上センサSU2、下センサSD2、接続通気口電磁弁62a、非接続通気口電磁弁64aが接続されている。さらに、ポンプモータ36aを駆動するポンプモータドライバ37a、ポンプモータ36aの負荷電流を検出する負荷電流センサ39aが接続されている。
【0055】
また、図2Aに示すように、各列の吸着パッド12aに対し、吸着パッド位置センサ81aが設けられている。この実施形態では、この吸着パッド位置センサ81aは、磁気センサとして構成されている。一方、図2Bに示すように、履帯シャーシ6aの内壁には、前部マグネット83a、後部マグネット85a、85aが設けられている。したがって、これらマグネットの位置に吸着パッド位置センサ81aが近接すると、吸着パッド位置センサ81aは検出出力を出すので、当該吸着パッド12aが、壁に接して吸着を開始すべき位置に到達したこと、あるいは、壁から離れようとしている位置に到達したことを検出することができる。この実施形態では、前部マグネット83aの検出により壁に接したことを検知し、後部マグネット85a、85aの検出により壁から離れようとしていることを検知するようにしている。なお、前部マグネット83aは1つ、後部マグネット85a、85aは2つ設けられているので、これを区別して検出することができる。
【0056】
図7に示すように、CPU72aには、上述の吸着パッド位置センサ81aが接続されている。なお、この実施形態では、1つのポンプ部26aによって、3列の吸着パッド12aの位置を検出するようにしているので、吸着パッド位置センサ81aは、3つ接続されている。
【0057】
2.2吸着制御プログラム87aの処理フローチャート
(1)吸着開始処理
図9、図10に、吸着制御プログラム87aのフローチャートを示す。この処理を説明するにあたり、壁走行装置2は前進しているものとして、図8を参照しながら行う。図8Aは、履帯8aを側面から見た図である。図8Bは、吸着パッド12aとマグネット83a、85aと吸着パッド位置センサ81a−1、81a−2、81a−3のみを示す、底面図である。図8Bにおいては、吸着パッド12aの位置を、P11、P12・・・P33として示している。
【0058】
図8Bに示されるように、吸着パッド12aは、1列3個で3列分を1つのグループとして、ポンプ部26aによって管理される。図においては、グループα1、α2・・・が示されている。また、図において、真円で示されている吸着パッド12aは壁面に吸着可能に接しており、楕円で示されている吸着パッド12aは壁面に吸着可能には接していないことを表している。
【0059】
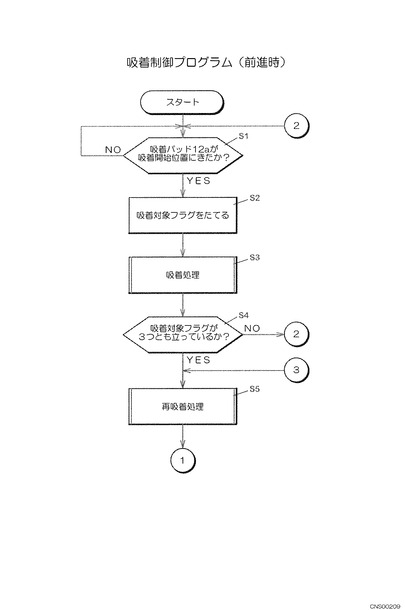
以下においては、図8Bのグループα1の吸着パッド12aを制御する吸着制御プログラム87aを例として説明を行う。図9のフローチャートにおいて、CPU72aは、吸着パッド12aが吸着開始位置に来たかどうかを判断する(ステップS1)。たとえば、図8Bに示すように、1列目の吸着パッド12a(P11、P12、P13)が吸着開始位置にくると、吸着パッド位置センサ81a−1がオンとなる。CPU72aは、これを検出して、1列目の吸着パッド12a(P11、P12、P13)が吸着開始位置に来たと判断する。以下、P11に位置する吸着パッド12aを吸着パッドP11、P12に位置する吸着パッド12aを吸着パッドP12、P13に位置する吸着パッド12aを吸着パッドP13などと呼ぶこととする。
【0060】
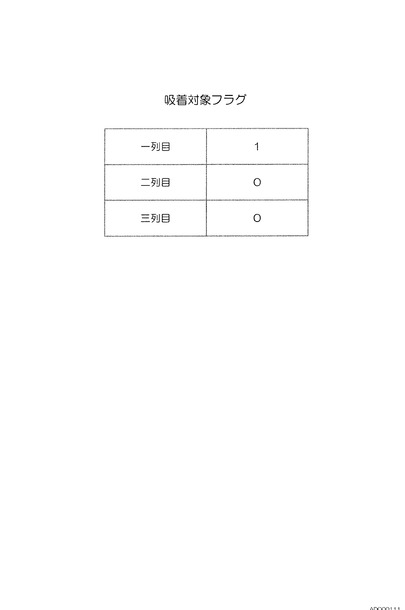
吸着パッド12aが吸着開始位置に来たことを検出すると、CPU72aは、当該列に対して、吸着対象フラグを立てる(ステップS2)。ここでは、図11に示すように、一列目に対して、吸着対象フラグを立てる(「1」とする)。
【0061】
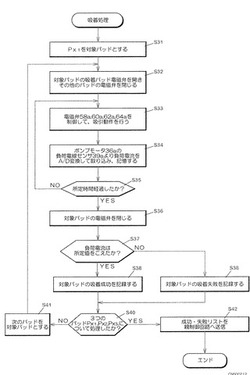
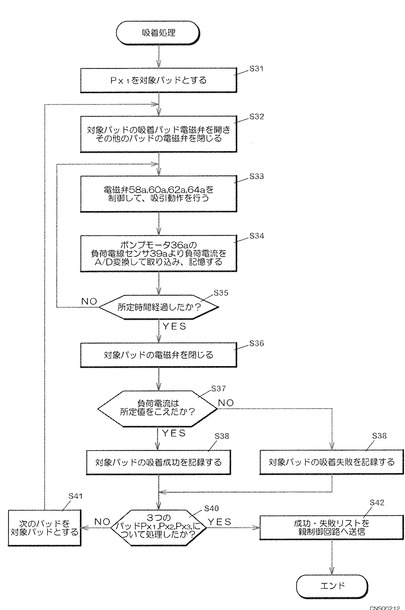
次に、CPU72aは、吸着処理を行う(ステップS3)。この吸着処理の詳細を、図12に示す。CPU72aは、まず、最も内側の吸着パッドPx1を対象パッドとする。ここでは、図8に示す吸着パッドP11が対象パッドとなる。
【0062】
続いて、CPU72aは、対象パッドである吸着パッドP11の電磁弁17a(図3参照)を開き、その他の吸着パッドP12、P13、P21、P22、P23、P31、P32、P33の電磁弁17aを閉じる(ステップS32)。これにより、ポンプ部26aからの吸引処理は、対象パッドである吸着パッドP11に対してのみ行われることになる。
【0063】
次に、CPU72aは、第1ポンプ32aの電磁弁58a、60aおよび第2ポンプ34aの電磁弁62a、64aを制御して、吸引動作を行う(ステップS33)。前述のように、CPU72aは、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)であれば、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。また、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)であれば、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。このようにして、対象パッドである吸着パッドP11に対する吸引動作を行うことができる。
【0064】
なお、CPU72aは、第1ポンプ32aの上センサSU1、下センサSD1を監視することにより、ピストンの上昇時であるか否かを判断することができる。たとえば、上センサSU1がオンになった後、下センサSD1がオンになるまでの間は、下降であると判断できる。反対に、下センサSU1がオンになった後、上センサSD1がオンになるまでの間は、上昇であると判断できる。
【0065】
この吸引動作の間、CPU72aは、ポンプモータ36aの負荷電流センサ39aが検出した負荷電流を、A/D変換して取り込み、RAM74aに刻々記録する(ステップS34)。
【0066】
次に、CPU72aは、吸引開始より所定時間(たとえば100マイクロ秒)が経過したかどうかを判断する(ステップS35)。所定時間が経過していなければ、CPU72aは吸引動作を続ける。所定時間が経過すれば、対象パッドである吸着パッドP11の電磁弁17aを閉じる(ステップS36)。
【0067】
続いて、CPU72aは、RAM74aに記録した負荷電流値の最大値が、所定のしきい値を超えたか否かを判断する(ステップS37)。吸着パッドP11からの空気の漏れが無く、吸引が成功していれば、ポンプモータ36aの負荷は高くなり、その負荷電流も大きくなるはずである。したがって、負荷電流がしきい値を超えたか否かを判断することにより、吸着パッドP11による吸着が成功したかどうかを判断することができる。
【0068】
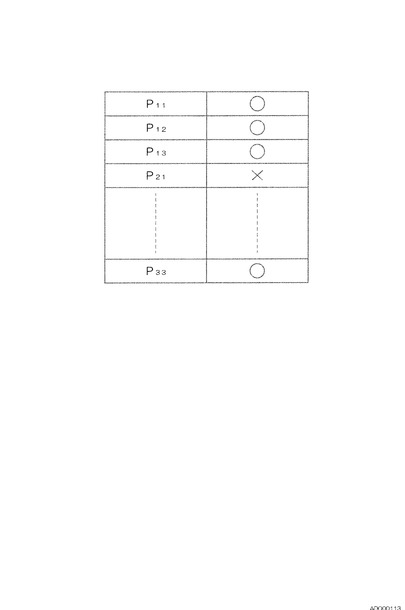
しきい値を超えていれば、CPU72aは、対象パッドの吸着成功をRAM74aに記録する(ステップS38)。しきい値を超えていなければ、CPU72aは、対象パッドの吸着失敗をRAM74aに記録する(ステップS39)。吸着パッドP11の吸着が成功した場合には、図13に示すように、○が記録される。
【0069】
次に、CPU72aは、3つの吸着パッドの全てについて上記の吸着処理を行ったかどうかを判断する(ステップS40)。ここでは、まだ、吸着パッドP12、P13に対する処理が残っているので、ステップS41に進む。
【0070】
ステップS41においては、次の吸着パッドP12を対象パッドとして、ステップS32以下の処理を繰り返す。これにより、吸着パッドP12に対する吸引が行われ、その成功・失敗が記録される。同様にして、次に、吸着パッドP13に対する吸引処理が行われ、その成功・失敗が記録される。
【0071】
1列に並んだ3つの吸着パッドP11、P12、P13の吸引が成功した場合、図13に示すように、P11、P12、P13のそれぞれに○が記録されることになる。
【0072】
3つの対象パッド(ここでは、P11、P12、P13の吸着パッド)についての吸着処理が終了すると、CPU72aは、3つの対象パッドの吸着成功・失敗の情報を、グループ名(ここではα1)と共に、通信回路78aを介して、親制御回路20に送信する。
【0073】
以上のようにして、一列分の吸着パッドP11、P12、P13に対する吸着処理が終了する。
【0074】
図9に戻って、CPU72aは、列に対する吸着対象フラグが全て立っているかどうかを判断する(ステップS4)。ここでは、図11に示すように、一列目のみしかフラグが立っていないので、ステップS1に戻って処理を繰り返す。
【0075】
すなわち、図8Bの吸着パッドP21、P22、P23が、吸着開始位置にきたかどうかを検出する(ステップS1)。吸着パッドP21、P22、P23が吸着開始位置にくれば、CPU72aは、二列目の吸着フラグを立て(ステップS2、図11参照)、吸着処理を行う(ステップS3)。3つの対象パッド(ここでは、P21、P22、P23)の吸着成功・失敗が、親制御回路20に送信される。
【0076】
同様にして、吸着パッドP31、P32、P33に対しても、同様の吸着処理がなされ、吸着成功・失敗が親制御回路20に送信される。
【0077】
したがって、親制御回路20においては、図13のような情報を、グループα1に関して得ることができ、各吸着パッドP11〜P33が正しく吸着しているかどうかを知ることができる。
【0078】
(2)再吸着処理
図9に戻って、グループα1を管理するポンプ部26aのCPU72aは、全ての吸着パッドP11〜P33に対するステップS3の吸着処理を終了すると、所定時間(たとえば、200マイクロ秒)ごとに、再吸着処理を行う(ステップS5)。再吸着処理においては、3列の吸着パッドP11〜P33に対し、再度、図12に示す吸着処理を行う。つまり、図12に示す吸着処理を、三列分繰り返して行う。また、その際の吸着の成功失敗情報を更新し、親制御回路20に送信する。
【0079】
このように、再吸着処理を行うことで、吸着パッドによる吸着を常にリフレッシュして、吸着力を高く維持することができる。
【0080】
(3)排気処理
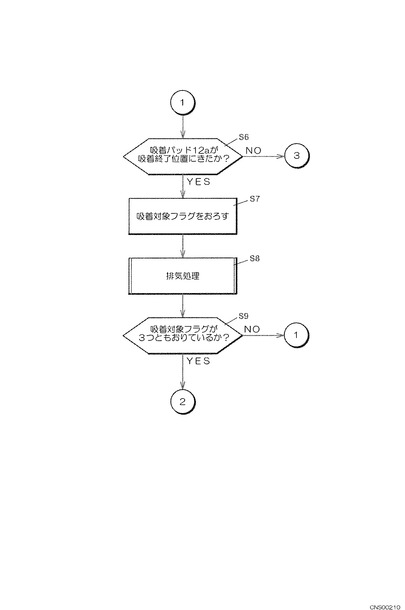
壁走行装置2が進行方向4に進むにしたがって、グループα1の吸着パッドP11〜P33は、後方に移動する。そして、吸着パッドP11、P12、P13が吸着終了位置に到達する。CPU72aは、吸着パッド位置センサ81a−1が、2つのマグネット85a、85aによって、オンとなるのを検出することで、吸着パッドP11、P12、P13が吸着終了位置に到達したことを知ることができる。
【0081】
CPU72aは、ステップS6において、吸着パッドP11、P12、P13が、吸着終了位置にきたことを検出すると、一列目の吸着対象フラグを降ろす(ステップS7)。
【0082】
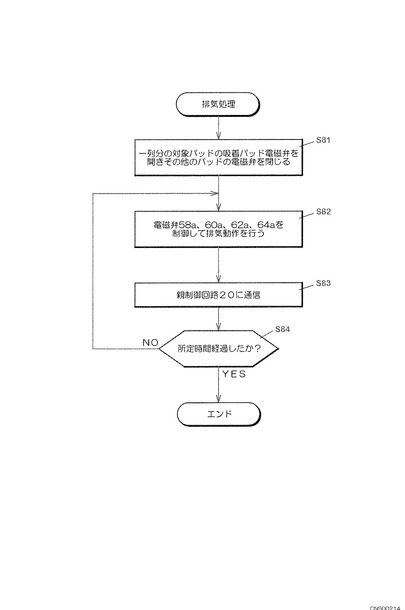
続いて、CPU72aは、一列目の3つの吸着パッドP11、P12、P13を対象パッドとして、排気処理を行う(ステップS8)。排気処理の詳細を、図14に示す。まず、ステップS81において、対象となる一列分の吸着パッドP11、P12、P13の吸着パッド電磁弁17aを開き、その他の列の吸着パッドP21、P22、P23、P31、P32、P33の吸着パッド電磁弁17aを閉じる(ステップS81)。
【0083】
次に、CPU72aは、第1ポンプ32aの電磁弁58a、60aおよび第2ポンプ34aの電磁弁62a、64aを制御して、排気動作を行う(ステップS82)。前述のように、CPU72aは、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)であれば、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。また、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)であれば、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。このようにして、対象パッドである吸着パッドP11、P12、P13に対する排気動作を行うことができる。排気処理を行ったことは、通信回路を78aを介して、親制御回路20に通信される。
【0084】
続いて、CPU72aは、排気動作開始から所定時間経過したかを判断する(ステップS84)。所定時間経過(たとえば200マイクロ秒)していなければ、排気動作を続ける。所定時間が経過すれば、CPU72aは、排気処理を終了する。
【0085】
図10に戻って、CPU72aは、吸着対象フラグが3列とも降りているかどうかを判断する。ここでは、一列目のフラグが降りているだけであるから、ステップS6に戻って処理を行う。
【0086】
ステップS6において、CPU72aは、二列目の吸着パッドP21、P22、P23が、吸着終了位置にきたかどうかを判断する。吸着終了位置にくれば、二列目の吸着対象フラグを降ろし、二列目の吸着パッドP21、P22、P23に対して排気処理を行う。
【0087】
さらに、CPU72aは、三列目の吸着パッドP31、P32、P33が、吸着終了位置にきたかどうかを判断する。吸着終了位置にくれば、三列目の吸着対象フラグを降ろし、三列目の吸着パッドP31、P32、P33に対して排気処理を行う。
【0088】
このようにして、三列全ての吸着パッドP11〜P33に対して排気処理を終了すると、図9のステップS1に戻る。すなわち、一列目の吸着パッドP11、P12、P13が吸着開始位置にくるまで待機することになる。
【0089】
(4)その他
上記説明では、前進する場合について説明したが、後進する場合においても、同様の処理が行われる。また、上記では、グループα1の吸着パッドを管理するポンプ部26aについて説明したが、他のグループα2、α3・・・を管理するポンプ部26aも同様の処理を行う。したがって、親制御回路20には、全ての吸着パッド12aの現状が情報として知らされることになる。
【0090】
3.親制御回路
3.1ハードウエア構成
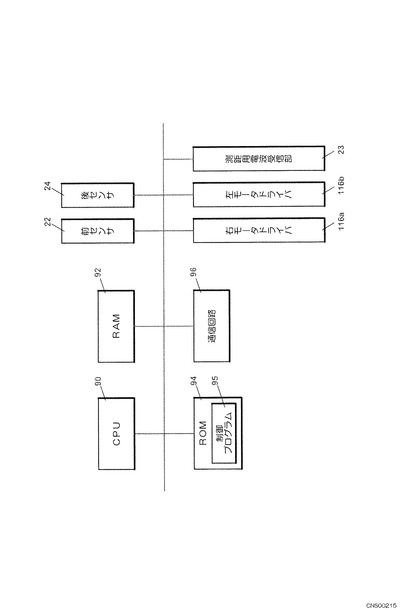
図15に、親制御回路20のハードウエア構成を示す。CPU90には、RAM92、ROM94、通信回路96、前センサ22、後センサ24、右モータドライバ116a、左モータドライバ116b、測距用電波受信部23が接続されている。前センサ22、後センサ24は、図1に示すように、本体基板18の前方および後方に取り付けられており、前後の障害物を検出するものである。たとえば、超音波発生器と受信器をペアとして用いることができる。受信器において受信がなされれば、障害物があることが分かる。
【0091】
通信回路96は、子制御回路70a、70bとの通信や、地上に設置されたPCとの無線通信を行うためのものである。ROM94には、制御プログラム95が記録されている。
【0092】
3.2制御プログラム95の処理
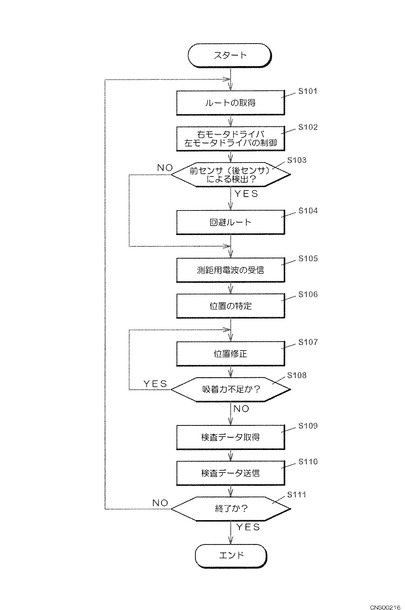
図16に、制御プログラム95のフローチャートを示す。RAM92には、地上に設置されたPC(図示せず)から送信された走行ルートが記録されている。CPU90は、この走行ルートの小単位を読み出し、次のいずれの方向に移動すればよいかのデータを取得する。CPU90は、取得したルートに基づいて、所望の方向に移動するように、右モータドライバ116a、左モータドライバ116bを介して、モータ16a、16bを制御する。
【0093】
このモータ制御を行って小刻みに設定された目的地に到達するまでの間、前センサ22あるいは後センサ24が障害物を検知すると(ステップS103)、CPU90は、回避ルートを選択する(ステップS104)。障害物がない場合には、回避ルートの選択は行われない。
【0094】
次に、CPU90は、壁面の2点(通常は、地上における離れた2点)に設置された送信器からの測距用電波(位置検出用の放射)を、受信器23を介して受信する(ステップS105)。この測距用電波には、送信器から送信された時刻が記録されている。したがって、CPU90は、受信した電波に記録された時刻と、受信した時刻との時間差に基づいて、自らの位置を特定することができる(ステップS106)。
【0095】
次に、CPU90は、モータ16a、16bを制御して到達した目的地と、ステップS106によって計測した位置とのズレを判定する。ズレがなければ、修正は行わない。ズレがあれば、CPU90は、モータ16a、16bを制御して、目的地に到達するように壁走行装置2を移動させる(ステップS107)。
【0096】
続いて、CPU90は、子制御回路70a、70bのそれぞれから送信されてきた各吸着パッド12a、12bの吸着状況に基づいて、吸着力不足の可能性がないかどうかを判断する(ステップS108)。たとえば、重量との関係で必要な吸着力に対し、吸着に成功している吸着パッド12a、12bの吸着力を合計しても、所定割合(たとえば10%)未満の余裕しかない場合には、吸着力不足のおそれがあると判断する。
【0097】
吸着力不足のおそれがある場合、壁面の状態がよくない可能性があるので、CPU90は、壁走行装置2の位置をずらせるように制御を行う(ステップS107)。たとえば、右側の吸着パッド12aが、左側の吸着パッド12aに比べて、吸着失敗が多い場合には、壁走行装置2を左側に移動させる。
【0098】
次に、CPU90は、本体基板18に搭載された検査装置を作動させ、検査データを取得する(ステップS109)。図1においては、検査装置を示していないが、この壁走行装置2には、種々の検査装置や補修装置を搭載することが可能である。
【0099】
たとえば、図17に示すような検査装置を本体基板18の後端部に取り付けることができる。この検査装置は、本体基板18に固定された左右のベース200、200を有している。左右のベース200、200により、シャフト202が支持されている。また、ネジシャフト204は、回転可能に支持されている。可動体206は、シャフト202を貫通させる貫通穴(図示せず)、ネジシャフト204と螺合する螺合穴(図示せず)を有している。
【0100】
ネジシャフト204がモータ208によって回転されると、可動体206は、モータ208の回転方向により、左右に移動することになる。可動体206には、モータ210が固定されており、打診棒212を上下に移動させる。また、可動体206には、マイク214が取り付けられている。したがって、CPU90は、モータ210を制御して打診棒212によって壁面を叩き、その際の音をマイク214で取得する。CPU90は、取得した音を、ディジタルデータとして、RAM92に記録する。
【0101】
また、CPU90は、モータ208を制御して、打診棒212によって叩く位置を左右に移動させる。CPU80は、取得した音データを、位置情報とともに、通信回路96を介して地上のPCに送信する(ステップS110)。
【0102】
地上のPCは、音データをFFTなどで解析し、タイルのはがれなどの部位を特定する。
【0103】
4.その他の実施形態
(1)上記実施形態では、吸着パッド12aを一列に3つ配置したが、2つ以下、4つ以上配置するようにしてもよい。
【0104】
(2)上記実施形態では、ポンプモータの駆動電流によって駆動力を検知したが、その他の物理量を測定することによって駆動力を検知するようにしてもよい。
【技術分野】
【0001】
この発明は、建物などの壁を自走して、検査や補修などを行う走行装置に関するものである。
【背景技術】
【0002】
建物の外壁などの検査や補修を行うためには、作業員が作業を行うための足場を組む必要があり、時間や費用を要していた。この問題を解決するために、壁面を自走する装置の提案がなされている。たとえば、中空のローラに多数の孔を設け、ローラ内の空気を吸気することにより、壁面に吸い付きながら走行する装置が提案されている。
【0003】
また、特許文献1には、真空吸着パッドによって壁面を走行する装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−238306
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、中空ローラを用いた装置では、吸着のためのポンプが大型であり、走行装置とは別に、地上にポンプを設けなければならなかった。このため、地上のポンプと走行装置をつなぐホースが必要であり、走行装置の自由な走行が妨げられていた。また、ローラに多数の穴を開けて吸着する構造であるため、吸着力が十分でないという問題もあった。
【0006】
また、特許文献1の装置では、真空パッドによる吸着が確実に行われずに、装置が落下するおそれがあった。また、地上にポンプを設けなければならなかった。
【0007】
この発明は、上記のような問題点を解決して、吸着力を確保し、地上のポンプなどとの間のホースを必要としない走行装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)この発明による壁面走行装置は、駆動部によって回転させられる履帯と、履帯に設けられ、吸気によって吸着を行う複数の吸着部と、吸着部の吸気および排気を行う吸気排気部と、吸気排気部を制御する制御手段とを備えた壁走行装置であって、前記制御手段は、履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、吸気排気部の駆動力を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段とを備えたことを特徴としている。
【0009】
したがって、壁面への吸着状態を確認しつつ、走行を行うことができる。
【0010】
(2)この発明による壁面走行装置は、駆動部によって回転させられる履帯と、履帯に設けられ、吸気によって吸着を行う複数の吸着部と、吸着部の吸気および排気を行う吸気排気部と、吸気排気部を制御する制御手段とを備えた壁走行装置であって、前記吸気排気部は、非接続通気口と接続通気口を備え、モータによってピストンの往復運動を行う第1のポンプと、非接続通気口と接続通気口を備え、モータによって、第1のポンプのピストンと逆となるようにピストンの往復運動を行う第2のポンプと、前記第1のポンプの接続通気口と前記第2のポンプの接続通気口を連通させる連通管と、連通管と複数の吸着部とを接続する接続管とを備えており、前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開き、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じることによって、吸着部に対して吸気を行うように制御し、前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じ、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開くことによって、吸着部に対して排気を行うように制御することを特徴としている。
【0011】
したがって、効率的に、吸気と排気を行うことができる。
【0012】
(3)この発明の壁走行装置は、前記制御手段は、履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、吸気排気部のモータの電流を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段とを備えたことを特徴としている。
【0013】
したがって、壁面への吸着状態を確認しつつ、走行を行うことができる。
【0014】
(4)この発明の壁走行装置は、制御手段は、接続管と吸着部の開閉を制御することにより、特定の吸着部に対して、吸気または排気を行うことを特徴としている。
【0015】
したがって、1つの吸気排気部によって複数の吸着部に対し、吸気と排気を行うことができる。
【0016】
(5)この発明の壁走行装置は、制御手段は、吸着部が壁面に接している間、所定間隔で吸気制御手段と吸着確認手段による動作を繰り返すことを特徴としている。
【0017】
したがって、より確実に、壁面に対する吸着を行うことができる。
【0018】
(6)この発明の壁走行装置は、壁面の検査データを取得する取得手段と、当該取得した検査データを、地上の検査データ解析のためのコンピュータに送信する検査データ送信手段とを備えている。
【0019】
したがって、壁走行装置によってデータを取得し、地上のコンピュータによって解析を行うことができる。
【0020】
(7)この発明のシステムは、壁走行装置と、地上制御装置を備えたシステムであって、
前記壁走行装置は、駆動部によって回転させられる2つの履帯と、履帯に設けられ、吸気によって吸着を行う複数の吸着部と、吸着部の吸気および排気を行う吸気排気部と、吸気排気部を制御するとともに、2つの履帯を駆動する駆動部を制御して進行方向を制御する制御手段と、位置検出用の放射を受けて自らの位置を検出する装置位置検出手段とを備えた壁走行装置とを備え、
前記地上制御装置は、予め定められた壁走行装置の走行ルートを記録する記録部と、装置位置検出手段によって検出された壁走行装置の位置と、記録された走行ルートとに基づいて、壁走行装置の制御手段に対して、走行方向を指示する走行方向指示部とを備えている。
【0021】
したがって、壁走行装置は、定められたルートにつき自らの位置を修正しながら進むことができる。
【図面の簡単な説明】
【0022】
【図1】この発明の一実施形態による壁走行装置2の外観図である。
【図2】履帯8aと吸着パッド位置センサ81aとマグネット83a、85aの関係を示す図である。
【図3】吸着パッド12aを示す図である。
【図4】ポンプ部26付近の構造を示す図である。
【図5】ポンプ部26の内部構造を示す図である。
【図6】全体の回路構成を示す図である。
【図7】子制御回路70aのハードウエア構成である。
【図8】子制御回路70aの動作を説明するための図である。
【図9】吸着制御プログラム87aのフローチャートである。
【図10】吸着制御プログラム87aのフローチャートである。
【図11】吸着対象フラグの例である。
【図12】吸着処理の詳細を示す図である。
【図13】吸着パッド12aの吸着が成功したか失敗したかを示す記録である。
【図14】廃棄処理のフローチャートである。
【図15】親制御回路20のハードウエア構成である。
【図16】制御プログラム95のフローチャートである。
【図17】検査装置の例である。
【発明を実施するための形態】
【0023】
1.壁走行装置の外観および機械的構造
1.1外観および履帯の構造
図1に、この発明の一実施形態による壁走行装置2の外観を示す。壁走行装置2の前進進行方向4に向かって左右に、履帯シャーシ6a、6bが設けられている。履帯シャーシ6a、6bの中には、それぞれ、一対の履帯8a、8aおよび8b、8bが設けられており、履帯シャーシ6a、6bの底面は開放されており、履帯8a、8aおよび8b、8bが露出するようになっている。
【0024】
一対の履帯8a、8aおよび8b、8bの外周には、それぞれ、吸着パッド12a、12bが設けられている。なお、図1においては、内部構造を説明するため、進行方向右側の吸着パッド12aは、図示していない。
【0025】
以下、進行方向右側の履帯8a、8aについて、その構造を説明する。一対の履帯8a、8aは、連結軸10aによって連結された一対の回転板14a、14aに係合されている。回転板14a、14aの外周には、歯車が設けられており、これにより履帯8a、8aと係合がなされている。連結軸10aは、履帯シャーシ6aの側壁に、ベアリングにより回転可能に軸支されている。なお、図2Aに示すように、前進進行方向4に関しての前方端だけでなく、後方端にも、同様の回転板15a、15aが設けられている。
【0026】
履帯8a、8aは、前方端の回転板14a、14aと、後方端の回転板15a、15aとの間に張架され、これら回転板14a、14a、15a、15aに係合されている。図1に示すように、前方端の回転板14a、14aの回転軸10aには、ギア(図示せず)を介してモータ16aが接続されている。したがって、モータ16aが回転すると、履帯8a、8aおよび吸着パッド12aも回転し、前方端の回転板14a、14aと後方端の回転板15a、15aの間の吸着パッド12aが移動することになる。このようにして、無限軌道が形成されている。なお、モータ16aは、履帯シャーシ6aに装着されている。
【0027】
また、進行方向左側の履帯8b、8bも上記と同じ構造により、無限軌道とされている。
【0028】
左右の履帯シャーシ6a、6bの間には、本体基板18が設けられている。本体基板18は、4カ所に設けられたゴムブッシュ150を介して、履帯シャーシ6a、6bに取り付けられている。図1においては、後方端の回転板15a、15bの近傍に設けられたゴムブッシュ150のみを示しているが、前方端の回転板14a、14bの近傍にも設けられている。
【0029】
ゴムブッシュ150を設けることにより、壁走行装置2が左右に曲がって進行する場合などにおいても、余裕を持つことができる。
【0030】
本体基板18上には、親制御回路20、前方障害物センサ22、後方障害物センサ24、検査装置や補修装置(図示せず)が搭載されている。
【0031】
1.2吸着機構
図3に、吸着パッド12a近傍の構造を示す。この実施形態では、一列に3つの吸着パッド12aが設けられている。図3Aは正面から見た図であり、図3Bはその側面図である。
【0032】
吸着パッド12aは、吸引部13aから吸引を行うことで、その吸着力を高めることが可能に構成されている(真空吸着パッド)。吸引部13aは、電磁弁17aを介して、接続口19aに接続されている。電磁弁17aを開くと、吸引部13aと接続口19aが連通し、電磁弁17bを閉じると、連通が遮断される。接続口19aには、後述のようにポンプが接続されるので、電磁弁17aを開いて、ポンプで吸引を行うことにより、吸着力を高めることができる。
【0033】
なお、上記では、右側の吸着パッド12aについて説明したが、左側の吸着パッド12bについても同様の構造となっている。
【0034】
図4に、ポンプ部26の取り付け構造を示す。ポンプ部26は、履帯8aに設けられたステー9aによって、履帯8aに固定されている。したがって、ポンプ部26は、履帯8aとともに移動・回転する。
【0035】
図4Aは、履帯シャーシ16aの上部を取り除いた場合の平面図である。図4Aに現れている履帯シャーシ16aの側壁は、本体基板18に近い側の側壁である。
【0036】
図4Bは、正面図である。履帯シャーシ16aの側壁には、ポンプ部26に電源を供給するための、電源ラインVCC、グランドラインGNDが設けられている。また、信号をやりとりするための信号ラインSGも設けられている。なお、図においては、信号ラインSGは1本だけとしているが、用いる通信規格に応じて、必要本数を設ける必要がある。これらのラインは、メッキや印刷などによって形成することができる。
【0037】
図4Cの側面図に示すように、ポンプ部26aと電源ラインVCC、グランドラインGND、信号ラインSGとの間の接続には、摺動接触子28a、29a、30aが用いられる。したがって、ポンプ部26aが移動しても、各ラインとの接触が保たれる。
【0038】
この実施形態においては、ポンプ部26aは、3列の吸着パッド12a(つまり、3×3=9個)に対して1つ設けられている。
【0039】
なお、左側の履帯8bに対しても、同様の構造のポンプ部26bが設けられている。
【0040】
図5に、ポンプ部26aに収納されたポンプの構造を示す。図5Aが正面図、図5Bが側面図である。第1のポンプ32aおよび第2のポンプ34aが設けられている。ポンプモータ36aが回転すると、スライダ板38a、40aが回転する。スライダ板38a、40aには、ジョイント42a、44aの一端が接続されている。また、ジョイント42a、44aの他端には、シャフト46a、48aが接続されている。
【0041】
したがって、スライダ板38a、40aが回転すると、第1のポンプ32a、第2のポンプ34aのピストンが上下することになる。なお、図5に示すように、第1のポンプ32aのピストンと第2のポンプ34aのピストンは、180度の位相差を持って上下する。
【0042】
なお、第1のポンプ32aのピストンと第2のポンプ34aのピストンの位置は、上センサSU1、下センサSD1、上センサSU2、下センサSD2によって検出することができる。センサとしては、近接センサなどを用いることができる。
【0043】
第1のポンプ32aには、非接続通気口50aと接続通気口52aが設けられている。非接続通気口50aには電磁弁58aが設けられ、接続通気口52aには電磁弁60aが設けられている。電磁弁58a、60aの開閉を制御することにより、いずれの通気口50a、52aから吸気するか(排気するか)を切り換えることができる。たとえば、ピストンが上方向に移動する際に、電磁弁58aを閉じ、電磁弁60aを開くと、接続通気口52aから吸気が行われることになる。
【0044】
第2のポンプ34aには、接続通気口54aと非接続通気口56aが設けられている。接続通気口54aには電磁弁62aが設けられ、非接続通気口56aには電磁弁64aが設けられている。電磁弁62a、64aの開閉を制御することにより、いずれの通気口54a、56aから吸気するか(排気するか)を切り換えることができる。
【0045】
第1のポンプ32aの接続通気口52aと第2のポンプ34aの接続通気口54aは、連通管66aによって連通されている。連通管66aには、図3に示す吸着パッド12aおよび電磁弁17aが接続されている。図5Aに示すように、3つの電磁弁17aおよび吸着パッド12aが、連通管66aに直接接続されている。
【0046】
前述のように、この実施形態では、1つのポンプ部26aにより、9個の吸着パッド12aの吸排気を処理するようにしている。つまり、図5Aに示す3つの吸着パッド12aだけでなく、図5Bに示すように、前後6つの吸着パッド12aについても吸排気を処理するようにしている。そこで、図5Bに示すように、連通管66aの前後には、3つずつ合計6個の通気口75aが設けられている。これらの通気口75aは、チューブ77aによっって、前後の吸着パッド12aの電磁弁17aの接続口19aに接続される。
【0047】
したがって、この実施形態では、1つのポンプ部26aによって、9個の吸着パッド12aに対して、吸着・排気を行うことができる。
【0048】
たとえば、吸着パッド12aに対して吸気を行う場合には、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)に、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。さらに、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)に、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。このようにすることで、連続的に吸気を行うことができる。
【0049】
また、吸着パッド12aに対して排気を行う場合には、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)に、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。さらに、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)に、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。このようにすることで、連続的に排気を行うことができる。
【0050】
なお、図示していないが、ポンプ部26aには、子制御回路も収納されている。
【0051】
2.子制御回路
2.1子制御回路のハードウエア構成
図6に、回路構成を示す。本体基板18に設けられた親制御回路20と、左右の履帯8a、8bに設けられた子制御回路70a、70bは、信号ラインSG(図4参照)を介して接続されている。
【0052】
子制御回路70a、70bは、担当する吸着パッド12a、12bの吸着制御を行う。親制御回路20は、装置全体の走行制御や、吸着パッド12a、12b全体の吸着状態の監視などを行う。
【0053】
図7に、子制御回路70aのハードウエア構成を示す。CPU72aには、RAM74a、ROM76a、通信回路78aが接続されている。ROM76aには、吸着制御プログラム87aが記録されている。通信回路78aは、信号ラインSGを介して、親制御回路20と通信を行うためのものである。
【0054】
また、第1のポンプ32aに設けられた上センサSU1、下センサSD1、非接続通気口電磁弁58a、接続通気口電磁弁60a、第2のポンプ34aに設けられた上センサSU2、下センサSD2、接続通気口電磁弁62a、非接続通気口電磁弁64aが接続されている。さらに、ポンプモータ36aを駆動するポンプモータドライバ37a、ポンプモータ36aの負荷電流を検出する負荷電流センサ39aが接続されている。
【0055】
また、図2Aに示すように、各列の吸着パッド12aに対し、吸着パッド位置センサ81aが設けられている。この実施形態では、この吸着パッド位置センサ81aは、磁気センサとして構成されている。一方、図2Bに示すように、履帯シャーシ6aの内壁には、前部マグネット83a、後部マグネット85a、85aが設けられている。したがって、これらマグネットの位置に吸着パッド位置センサ81aが近接すると、吸着パッド位置センサ81aは検出出力を出すので、当該吸着パッド12aが、壁に接して吸着を開始すべき位置に到達したこと、あるいは、壁から離れようとしている位置に到達したことを検出することができる。この実施形態では、前部マグネット83aの検出により壁に接したことを検知し、後部マグネット85a、85aの検出により壁から離れようとしていることを検知するようにしている。なお、前部マグネット83aは1つ、後部マグネット85a、85aは2つ設けられているので、これを区別して検出することができる。
【0056】
図7に示すように、CPU72aには、上述の吸着パッド位置センサ81aが接続されている。なお、この実施形態では、1つのポンプ部26aによって、3列の吸着パッド12aの位置を検出するようにしているので、吸着パッド位置センサ81aは、3つ接続されている。
【0057】
2.2吸着制御プログラム87aの処理フローチャート
(1)吸着開始処理
図9、図10に、吸着制御プログラム87aのフローチャートを示す。この処理を説明するにあたり、壁走行装置2は前進しているものとして、図8を参照しながら行う。図8Aは、履帯8aを側面から見た図である。図8Bは、吸着パッド12aとマグネット83a、85aと吸着パッド位置センサ81a−1、81a−2、81a−3のみを示す、底面図である。図8Bにおいては、吸着パッド12aの位置を、P11、P12・・・P33として示している。
【0058】
図8Bに示されるように、吸着パッド12aは、1列3個で3列分を1つのグループとして、ポンプ部26aによって管理される。図においては、グループα1、α2・・・が示されている。また、図において、真円で示されている吸着パッド12aは壁面に吸着可能に接しており、楕円で示されている吸着パッド12aは壁面に吸着可能には接していないことを表している。
【0059】
以下においては、図8Bのグループα1の吸着パッド12aを制御する吸着制御プログラム87aを例として説明を行う。図9のフローチャートにおいて、CPU72aは、吸着パッド12aが吸着開始位置に来たかどうかを判断する(ステップS1)。たとえば、図8Bに示すように、1列目の吸着パッド12a(P11、P12、P13)が吸着開始位置にくると、吸着パッド位置センサ81a−1がオンとなる。CPU72aは、これを検出して、1列目の吸着パッド12a(P11、P12、P13)が吸着開始位置に来たと判断する。以下、P11に位置する吸着パッド12aを吸着パッドP11、P12に位置する吸着パッド12aを吸着パッドP12、P13に位置する吸着パッド12aを吸着パッドP13などと呼ぶこととする。
【0060】
吸着パッド12aが吸着開始位置に来たことを検出すると、CPU72aは、当該列に対して、吸着対象フラグを立てる(ステップS2)。ここでは、図11に示すように、一列目に対して、吸着対象フラグを立てる(「1」とする)。
【0061】
次に、CPU72aは、吸着処理を行う(ステップS3)。この吸着処理の詳細を、図12に示す。CPU72aは、まず、最も内側の吸着パッドPx1を対象パッドとする。ここでは、図8に示す吸着パッドP11が対象パッドとなる。
【0062】
続いて、CPU72aは、対象パッドである吸着パッドP11の電磁弁17a(図3参照)を開き、その他の吸着パッドP12、P13、P21、P22、P23、P31、P32、P33の電磁弁17aを閉じる(ステップS32)。これにより、ポンプ部26aからの吸引処理は、対象パッドである吸着パッドP11に対してのみ行われることになる。
【0063】
次に、CPU72aは、第1ポンプ32aの電磁弁58a、60aおよび第2ポンプ34aの電磁弁62a、64aを制御して、吸引動作を行う(ステップS33)。前述のように、CPU72aは、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)であれば、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。また、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)であれば、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。このようにして、対象パッドである吸着パッドP11に対する吸引動作を行うことができる。
【0064】
なお、CPU72aは、第1ポンプ32aの上センサSU1、下センサSD1を監視することにより、ピストンの上昇時であるか否かを判断することができる。たとえば、上センサSU1がオンになった後、下センサSD1がオンになるまでの間は、下降であると判断できる。反対に、下センサSU1がオンになった後、上センサSD1がオンになるまでの間は、上昇であると判断できる。
【0065】
この吸引動作の間、CPU72aは、ポンプモータ36aの負荷電流センサ39aが検出した負荷電流を、A/D変換して取り込み、RAM74aに刻々記録する(ステップS34)。
【0066】
次に、CPU72aは、吸引開始より所定時間(たとえば100マイクロ秒)が経過したかどうかを判断する(ステップS35)。所定時間が経過していなければ、CPU72aは吸引動作を続ける。所定時間が経過すれば、対象パッドである吸着パッドP11の電磁弁17aを閉じる(ステップS36)。
【0067】
続いて、CPU72aは、RAM74aに記録した負荷電流値の最大値が、所定のしきい値を超えたか否かを判断する(ステップS37)。吸着パッドP11からの空気の漏れが無く、吸引が成功していれば、ポンプモータ36aの負荷は高くなり、その負荷電流も大きくなるはずである。したがって、負荷電流がしきい値を超えたか否かを判断することにより、吸着パッドP11による吸着が成功したかどうかを判断することができる。
【0068】
しきい値を超えていれば、CPU72aは、対象パッドの吸着成功をRAM74aに記録する(ステップS38)。しきい値を超えていなければ、CPU72aは、対象パッドの吸着失敗をRAM74aに記録する(ステップS39)。吸着パッドP11の吸着が成功した場合には、図13に示すように、○が記録される。
【0069】
次に、CPU72aは、3つの吸着パッドの全てについて上記の吸着処理を行ったかどうかを判断する(ステップS40)。ここでは、まだ、吸着パッドP12、P13に対する処理が残っているので、ステップS41に進む。
【0070】
ステップS41においては、次の吸着パッドP12を対象パッドとして、ステップS32以下の処理を繰り返す。これにより、吸着パッドP12に対する吸引が行われ、その成功・失敗が記録される。同様にして、次に、吸着パッドP13に対する吸引処理が行われ、その成功・失敗が記録される。
【0071】
1列に並んだ3つの吸着パッドP11、P12、P13の吸引が成功した場合、図13に示すように、P11、P12、P13のそれぞれに○が記録されることになる。
【0072】
3つの対象パッド(ここでは、P11、P12、P13の吸着パッド)についての吸着処理が終了すると、CPU72aは、3つの対象パッドの吸着成功・失敗の情報を、グループ名(ここではα1)と共に、通信回路78aを介して、親制御回路20に送信する。
【0073】
以上のようにして、一列分の吸着パッドP11、P12、P13に対する吸着処理が終了する。
【0074】
図9に戻って、CPU72aは、列に対する吸着対象フラグが全て立っているかどうかを判断する(ステップS4)。ここでは、図11に示すように、一列目のみしかフラグが立っていないので、ステップS1に戻って処理を繰り返す。
【0075】
すなわち、図8Bの吸着パッドP21、P22、P23が、吸着開始位置にきたかどうかを検出する(ステップS1)。吸着パッドP21、P22、P23が吸着開始位置にくれば、CPU72aは、二列目の吸着フラグを立て(ステップS2、図11参照)、吸着処理を行う(ステップS3)。3つの対象パッド(ここでは、P21、P22、P23)の吸着成功・失敗が、親制御回路20に送信される。
【0076】
同様にして、吸着パッドP31、P32、P33に対しても、同様の吸着処理がなされ、吸着成功・失敗が親制御回路20に送信される。
【0077】
したがって、親制御回路20においては、図13のような情報を、グループα1に関して得ることができ、各吸着パッドP11〜P33が正しく吸着しているかどうかを知ることができる。
【0078】
(2)再吸着処理
図9に戻って、グループα1を管理するポンプ部26aのCPU72aは、全ての吸着パッドP11〜P33に対するステップS3の吸着処理を終了すると、所定時間(たとえば、200マイクロ秒)ごとに、再吸着処理を行う(ステップS5)。再吸着処理においては、3列の吸着パッドP11〜P33に対し、再度、図12に示す吸着処理を行う。つまり、図12に示す吸着処理を、三列分繰り返して行う。また、その際の吸着の成功失敗情報を更新し、親制御回路20に送信する。
【0079】
このように、再吸着処理を行うことで、吸着パッドによる吸着を常にリフレッシュして、吸着力を高く維持することができる。
【0080】
(3)排気処理
壁走行装置2が進行方向4に進むにしたがって、グループα1の吸着パッドP11〜P33は、後方に移動する。そして、吸着パッドP11、P12、P13が吸着終了位置に到達する。CPU72aは、吸着パッド位置センサ81a−1が、2つのマグネット85a、85aによって、オンとなるのを検出することで、吸着パッドP11、P12、P13が吸着終了位置に到達したことを知ることができる。
【0081】
CPU72aは、ステップS6において、吸着パッドP11、P12、P13が、吸着終了位置にきたことを検出すると、一列目の吸着対象フラグを降ろす(ステップS7)。
【0082】
続いて、CPU72aは、一列目の3つの吸着パッドP11、P12、P13を対象パッドとして、排気処理を行う(ステップS8)。排気処理の詳細を、図14に示す。まず、ステップS81において、対象となる一列分の吸着パッドP11、P12、P13の吸着パッド電磁弁17aを開き、その他の列の吸着パッドP21、P22、P23、P31、P32、P33の吸着パッド電磁弁17aを閉じる(ステップS81)。
【0083】
次に、CPU72aは、第1ポンプ32aの電磁弁58a、60aおよび第2ポンプ34aの電磁弁62a、64aを制御して、排気動作を行う(ステップS82)。前述のように、CPU72aは、第1のポンプ32aのピストンの下降時(第2のポンプ34aのピストンの上昇時)であれば、非接続通気口50aを閉じ、接続通気口52aを開き、非接続通気口56aを開き、接続通気口54aを閉じる。また、第1のポンプ32aのピストンの上昇時(第2のポンプ34aのピストンの下降時)であれば、非接続通気口50aを開き、接続通気口52aを閉じ、非接続通気口56aを閉じ、接続通気口54aを開く。このようにして、対象パッドである吸着パッドP11、P12、P13に対する排気動作を行うことができる。排気処理を行ったことは、通信回路を78aを介して、親制御回路20に通信される。
【0084】
続いて、CPU72aは、排気動作開始から所定時間経過したかを判断する(ステップS84)。所定時間経過(たとえば200マイクロ秒)していなければ、排気動作を続ける。所定時間が経過すれば、CPU72aは、排気処理を終了する。
【0085】
図10に戻って、CPU72aは、吸着対象フラグが3列とも降りているかどうかを判断する。ここでは、一列目のフラグが降りているだけであるから、ステップS6に戻って処理を行う。
【0086】
ステップS6において、CPU72aは、二列目の吸着パッドP21、P22、P23が、吸着終了位置にきたかどうかを判断する。吸着終了位置にくれば、二列目の吸着対象フラグを降ろし、二列目の吸着パッドP21、P22、P23に対して排気処理を行う。
【0087】
さらに、CPU72aは、三列目の吸着パッドP31、P32、P33が、吸着終了位置にきたかどうかを判断する。吸着終了位置にくれば、三列目の吸着対象フラグを降ろし、三列目の吸着パッドP31、P32、P33に対して排気処理を行う。
【0088】
このようにして、三列全ての吸着パッドP11〜P33に対して排気処理を終了すると、図9のステップS1に戻る。すなわち、一列目の吸着パッドP11、P12、P13が吸着開始位置にくるまで待機することになる。
【0089】
(4)その他
上記説明では、前進する場合について説明したが、後進する場合においても、同様の処理が行われる。また、上記では、グループα1の吸着パッドを管理するポンプ部26aについて説明したが、他のグループα2、α3・・・を管理するポンプ部26aも同様の処理を行う。したがって、親制御回路20には、全ての吸着パッド12aの現状が情報として知らされることになる。
【0090】
3.親制御回路
3.1ハードウエア構成
図15に、親制御回路20のハードウエア構成を示す。CPU90には、RAM92、ROM94、通信回路96、前センサ22、後センサ24、右モータドライバ116a、左モータドライバ116b、測距用電波受信部23が接続されている。前センサ22、後センサ24は、図1に示すように、本体基板18の前方および後方に取り付けられており、前後の障害物を検出するものである。たとえば、超音波発生器と受信器をペアとして用いることができる。受信器において受信がなされれば、障害物があることが分かる。
【0091】
通信回路96は、子制御回路70a、70bとの通信や、地上に設置されたPCとの無線通信を行うためのものである。ROM94には、制御プログラム95が記録されている。
【0092】
3.2制御プログラム95の処理
図16に、制御プログラム95のフローチャートを示す。RAM92には、地上に設置されたPC(図示せず)から送信された走行ルートが記録されている。CPU90は、この走行ルートの小単位を読み出し、次のいずれの方向に移動すればよいかのデータを取得する。CPU90は、取得したルートに基づいて、所望の方向に移動するように、右モータドライバ116a、左モータドライバ116bを介して、モータ16a、16bを制御する。
【0093】
このモータ制御を行って小刻みに設定された目的地に到達するまでの間、前センサ22あるいは後センサ24が障害物を検知すると(ステップS103)、CPU90は、回避ルートを選択する(ステップS104)。障害物がない場合には、回避ルートの選択は行われない。
【0094】
次に、CPU90は、壁面の2点(通常は、地上における離れた2点)に設置された送信器からの測距用電波(位置検出用の放射)を、受信器23を介して受信する(ステップS105)。この測距用電波には、送信器から送信された時刻が記録されている。したがって、CPU90は、受信した電波に記録された時刻と、受信した時刻との時間差に基づいて、自らの位置を特定することができる(ステップS106)。
【0095】
次に、CPU90は、モータ16a、16bを制御して到達した目的地と、ステップS106によって計測した位置とのズレを判定する。ズレがなければ、修正は行わない。ズレがあれば、CPU90は、モータ16a、16bを制御して、目的地に到達するように壁走行装置2を移動させる(ステップS107)。
【0096】
続いて、CPU90は、子制御回路70a、70bのそれぞれから送信されてきた各吸着パッド12a、12bの吸着状況に基づいて、吸着力不足の可能性がないかどうかを判断する(ステップS108)。たとえば、重量との関係で必要な吸着力に対し、吸着に成功している吸着パッド12a、12bの吸着力を合計しても、所定割合(たとえば10%)未満の余裕しかない場合には、吸着力不足のおそれがあると判断する。
【0097】
吸着力不足のおそれがある場合、壁面の状態がよくない可能性があるので、CPU90は、壁走行装置2の位置をずらせるように制御を行う(ステップS107)。たとえば、右側の吸着パッド12aが、左側の吸着パッド12aに比べて、吸着失敗が多い場合には、壁走行装置2を左側に移動させる。
【0098】
次に、CPU90は、本体基板18に搭載された検査装置を作動させ、検査データを取得する(ステップS109)。図1においては、検査装置を示していないが、この壁走行装置2には、種々の検査装置や補修装置を搭載することが可能である。
【0099】
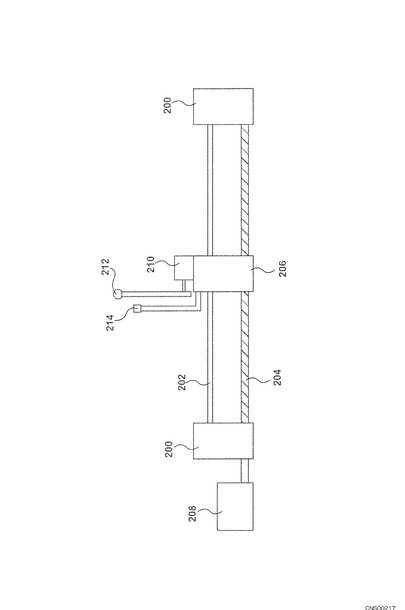
たとえば、図17に示すような検査装置を本体基板18の後端部に取り付けることができる。この検査装置は、本体基板18に固定された左右のベース200、200を有している。左右のベース200、200により、シャフト202が支持されている。また、ネジシャフト204は、回転可能に支持されている。可動体206は、シャフト202を貫通させる貫通穴(図示せず)、ネジシャフト204と螺合する螺合穴(図示せず)を有している。
【0100】
ネジシャフト204がモータ208によって回転されると、可動体206は、モータ208の回転方向により、左右に移動することになる。可動体206には、モータ210が固定されており、打診棒212を上下に移動させる。また、可動体206には、マイク214が取り付けられている。したがって、CPU90は、モータ210を制御して打診棒212によって壁面を叩き、その際の音をマイク214で取得する。CPU90は、取得した音を、ディジタルデータとして、RAM92に記録する。
【0101】
また、CPU90は、モータ208を制御して、打診棒212によって叩く位置を左右に移動させる。CPU80は、取得した音データを、位置情報とともに、通信回路96を介して地上のPCに送信する(ステップS110)。
【0102】
地上のPCは、音データをFFTなどで解析し、タイルのはがれなどの部位を特定する。
【0103】
4.その他の実施形態
(1)上記実施形態では、吸着パッド12aを一列に3つ配置したが、2つ以下、4つ以上配置するようにしてもよい。
【0104】
(2)上記実施形態では、ポンプモータの駆動電流によって駆動力を検知したが、その他の物理量を測定することによって駆動力を検知するようにしてもよい。
【特許請求の範囲】
【請求項1】
駆動部によって回転させられる履帯と、
履帯に設けられ、吸気によって吸着を行う複数の吸着部と、
吸着部の吸気および排気を行う吸気排気部と、
吸気排気部を制御する制御手段と、
を備えた壁走行装置であって、
前記制御手段は、
履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、
吸気排気部の駆動力を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段と、
を備えたことを特徴とする壁面走行装置。
【請求項2】
駆動部によって回転させられる履帯と、
履帯に設けられ、吸気によって吸着を行う複数の吸着部と、
吸着部の吸気および排気を行う吸気排気部と、
吸気排気部を制御する制御手段と、
を備えた壁走行装置であって、
前記吸気排気部は、
非接続通気口と接続通気口を備え、モータによってピストンの往復運動を行う第1のポンプと、
非接続通気口と接続通気口を備え、モータによって、第1のポンプのピストンと逆となるようにピストンの往復運動を行う第2のポンプと、
前記第1のポンプの接続通気口と前記第2のポンプの接続通気口を連通させる連通管と、
連通管と複数の吸着部とを接続する接続管とを備えており、
前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開き、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じることによって、吸着部に対して吸気を行うように制御し、
前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じ、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開くことによって、吸着部に対して排気を行うように制御することを特徴とする壁走行装置。
【請求項3】
請求項2の壁走行装置において、
前記制御手段は、
履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、
吸気排気部のモータの電流を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段とを備えたことを特徴とする壁走行装置。
【請求項4】
請求項3の壁走行装置において、
前記制御手段は、接続管と吸着部の開閉を制御することにより、特定の吸着部に対して、吸気または排気を行うことを特徴とする壁走行装置。
【請求項5】
請求項2〜4のいずれかの壁走行装置において、
前記制御手段は、吸着部が壁面に接している間、所定間隔で吸気制御手段と吸着確認手段による動作を繰り返すことを特徴とする壁走行装置。
【請求項6】
請求項2〜5のいずれかの壁走行装置において、さらに、
壁面の検査データを取得する取得手段と、
当該取得した検査データを、地上の検査データ解析のためのコンピュータに送信する検査データ送信手段と、
を備えた壁走行装置。
【請求項7】
壁走行装置と、地上制御装置を備えたシステムであって、
前記壁走行装置は、
駆動部によって回転させられる2つの履帯と、
履帯に設けられ、吸気によって吸着を行う複数の吸着部と、
吸着部の吸気および排気を行う吸気排気部と、
吸気排気部を制御するとともに、2つの履帯を駆動する駆動部を制御して進行方向を制御する制御手段と、
位置検出用の放射を受けて自らの位置を検出する装置位置検出手段とを備え、
前記地上制御装置は、
予め定められた壁走行装置の走行ルートを記録する記録部と、
装置位置検出手段によって検出された壁走行装置の位置と、記録された走行ルートとに基づいて、壁走行装置の制御手段に対して、走行方向を指示する走行方向指示部とを備えている。
【請求項1】
駆動部によって回転させられる履帯と、
履帯に設けられ、吸気によって吸着を行う複数の吸着部と、
吸着部の吸気および排気を行う吸気排気部と、
吸気排気部を制御する制御手段と、
を備えた壁走行装置であって、
前記制御手段は、
履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、
吸気排気部の駆動力を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段と、
を備えたことを特徴とする壁面走行装置。
【請求項2】
駆動部によって回転させられる履帯と、
履帯に設けられ、吸気によって吸着を行う複数の吸着部と、
吸着部の吸気および排気を行う吸気排気部と、
吸気排気部を制御する制御手段と、
を備えた壁走行装置であって、
前記吸気排気部は、
非接続通気口と接続通気口を備え、モータによってピストンの往復運動を行う第1のポンプと、
非接続通気口と接続通気口を備え、モータによって、第1のポンプのピストンと逆となるようにピストンの往復運動を行う第2のポンプと、
前記第1のポンプの接続通気口と前記第2のポンプの接続通気口を連通させる連通管と、
連通管と複数の吸着部とを接続する接続管とを備えており、
前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開き、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じることによって、吸着部に対して吸気を行うように制御し、
前記制御手段は、第1のポンプのピストンがシリンダ底面に近づくように移動する際に、第1のポンプの非接続通気口を閉じ、接続通気口を開き、第2のポンプの非接続通気口を開き、接続通気口を閉じ、第1のポンプのピストンがシリンダ底面から遠ざかるように移動する際に、第1のポンプの非接続通気口を開き、接続通気口を閉じ、第2のポンプの非接続通気口を閉じ、接続通気口を開くことによって、吸着部に対して排気を行うように制御することを特徴とする壁走行装置。
【請求項3】
請求項2の壁走行装置において、
前記制御手段は、
履帯の回転により吸着部が壁面に到達したことを検出する吸着部位置第1センサからの検出信号を受けると、吸気排気部を制御して、当該吸着部に対して吸気を行う吸気制御手段と、
吸気排気部のモータの電流を監視することにより、前記吸気制御手段の制御による吸気によって当該吸着部が壁面に吸着したかどうかを確認する吸着確認手段とを備えたことを特徴とする壁走行装置。
【請求項4】
請求項3の壁走行装置において、
前記制御手段は、接続管と吸着部の開閉を制御することにより、特定の吸着部に対して、吸気または排気を行うことを特徴とする壁走行装置。
【請求項5】
請求項2〜4のいずれかの壁走行装置において、
前記制御手段は、吸着部が壁面に接している間、所定間隔で吸気制御手段と吸着確認手段による動作を繰り返すことを特徴とする壁走行装置。
【請求項6】
請求項2〜5のいずれかの壁走行装置において、さらに、
壁面の検査データを取得する取得手段と、
当該取得した検査データを、地上の検査データ解析のためのコンピュータに送信する検査データ送信手段と、
を備えた壁走行装置。
【請求項7】
壁走行装置と、地上制御装置を備えたシステムであって、
前記壁走行装置は、
駆動部によって回転させられる2つの履帯と、
履帯に設けられ、吸気によって吸着を行う複数の吸着部と、
吸着部の吸気および排気を行う吸気排気部と、
吸気排気部を制御するとともに、2つの履帯を駆動する駆動部を制御して進行方向を制御する制御手段と、
位置検出用の放射を受けて自らの位置を検出する装置位置検出手段とを備え、
前記地上制御装置は、
予め定められた壁走行装置の走行ルートを記録する記録部と、
装置位置検出手段によって検出された壁走行装置の位置と、記録された走行ルートとに基づいて、壁走行装置の制御手段に対して、走行方向を指示する走行方向指示部とを備えている。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−136043(P2012−136043A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−287688(P2010−287688)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000130374)株式会社コンステック (8)
【出願人】(500112021)株式会社テクノリサーチ (1)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000130374)株式会社コンステック (8)
【出願人】(500112021)株式会社テクノリサーチ (1)
【Fターム(参考)】
[ Back to top ]