
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えばアンプ分離型変位センサを構成するアンプユニットを例えばDINレール等を介して密に連装してなる連装式変位センサシステムに適用する拡張ユニットに関する。
【背景技術】
【0002】
変位センサは、生産ラインで装置の動きを補助したり、ワークの出来上がり状態を検査したりすることで、物づくりの生産性や品質を維持・向上させることに使われる。このときのセンサによる生産ラインの各種課題の解決は、アプリケーションと呼ばれる。
【0003】
ところで、変位センサの場合、得られる情報はセンサからワークまでの変位情報のみであるため、実現できるアプリケーションが限られてしまう。そこで、ワークまたはセンサを移動させる等して時間情報をもたせると、ワークの様々な状態(ワークの個数、ワーク面の傾き、ワーク面の凹凸の大きさや形状、ワークの移動距離等)を表すデータを取得できる。この時間情報を有した変位データに何らかの加工や処理を加えることで、アプリケーションの実現が可能になり、ユーザの求めるより直接的な情報を提供できる。
【0004】
従来例として、変位センサの内部で、センシング処理の他に簡単なアプリケーション処理も行う、という構成がある。この場合、アプリケーション処理の結果表示や設定は、センサ本体で行うか、または、PCを接続して行う。また、変位センサのファームウェアを書き替え可能として、アプリケーションに対する変更自由度を向上させる従来例も知られている(特許文献1参照)。
【特許文献1】特開2003−99278公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
生産ラインのアプリケーションは生産品目、生産工程、生産者等の違いにより様々である。また、生産ラインはあらゆるメーカにおいて、日々改善がなされているため、新たなアプリケーションの発生は突然である。センサ側にその処理をもたせると、アプリケーションへの度重なる対応のたびに、センシング処理の部分を含めた広い範囲での改造が必要となる。そのため、改造コスト・納期がかかり、多くのアプリケーションに対応できなくなるし、改造によるリスクも大きい。また、将来発生するアプリケーション処理の規模は不明であり、それに対応できるようにROM容量等を大きくしておくと、センサ本体のコストがあがってしまい、アプリケーション処理自体が不要な場合でも、そのコストを上積みしてしまう。
【0006】
アプリケーション処理には、カウントや傾き計測等があり、これらは変位計のデータの後処理である。変位計には、レーザ式や磁気式等の様々な種類の変位計があり、それらを選ばない構成が望ましい。しかし、左記の従来例では、アプリケーションは同じでもセンサが違えば、新たにセンサを開発することになるため、改造コスト・納期がかかる。
【0007】
加えて、上述の従来例にあっては、センシング処理をしながら、アプリケーション処理を行うため、全体の処理が遅くなるという課題がある。
【0008】
この発明は上述の問題点に着目してなされたものであり、その目的とするところは、アンプ分離型変位センサを構成するアンプユニットに複雑なアプリケーションプログラムを組込むことなく、アンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能な連装式変位センサシステムを提供することにある。
【0009】
この発明の更に他の目的並びに作用効果については、明細書の以下の記述を参照することにより、当業者であれば容易に理解されるであろう。
【課題を解決するための手段】
【0010】
本発明の連装式変位センサシステムは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインとを有するものである。前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、拡張ユニットが伝送ラインに接続して連装される。
【0011】
この拡張ユニットには、前記計測データを蓄積するための計測データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記計測データ蓄積メモリに蓄積する計測データ取得手段と、前記計測データ蓄積メモリに蓄積された一連の計測データを所定のアルゴリズムにしたがって解析するデータ解析手段と、前記データ解析手段によるデータ解析結果を判定する判定手段と、前記判定手段による判定結果に対応する制御信号を外部へと出力する出力手段と、が具備されている。
【0012】
このような構成によれば、アンプ分離型変位センサを構成するアンプユニットに複雑なアプリケーションプログラムを組み込むことなく、アンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することができる。
【0013】
本発明システムの好ましい実施の形態においては、前記計測データ取得手段は、所定のデータ取得開始条件の成立により計測データの取得を自動的に開始すると共に、所定のデータ蓄積終了条件の成立により計測データの蓄積を自動的に終了するように構成される。このような構成によれば、データ取得開始条件及びデータ取得終了条件の設定如何で、計測データを適切に蓄積させることができる。
【0014】
本発明システムの好ましい実施の形態においては、前記計測データ取得手段は、前記取得開始から蓄積終了までの間、伝送ラインを介して到来する一連の計測データを所定の間隔をおいて選択的に取得するように構成される。このような構成によれば、解析に必要なデータ取得密度を維持しつつも計測データ蓄積メモリに容量に合わせたデータ取得が可能となる。
【0015】
本発明システムの好ましい実施の形態においては、計測データを取得するたびに各前回の演算処理結果を参照して、逐次演算処理を実行するようにしてもよい。このような構成によれば、蓄積された計測データに基づいて計測処理を実行する蓄積処理と、計測処理を逐次実行する逐次処理とを併用することができるので、蓄積処理を実行している最中に逐次処理を行うことにより、計測処理全体に要する時間を短縮することができる。
【0016】
本発明システムの好ましい実施の形態においては、前記拡張ユニットは、パソコン等の上位装置との間で通信可能とされている。このような構成によれば、パソコンのデータ処理機能を拡張ユニットの制御に反映することができる。
【0017】
本発明システムの好ましい実施の形態においては、前記拡張ユニットには、前記計測データを表示データとして蓄積するための表示データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記表示データ蓄積メモリに表示データとして蓄積する表示データ取得手段と、前記表示データ蓄積メモリに蓄積された表示データを前記上位装置へとアップロードする表示データアップロード手段と、が具備される。
【0018】
本発明システムの好ましい実施の形態においては、前記表示データ取得手段は、解析のための計測データ蓄積期間とは無関係に、解析用データの取得間隔よりも粗い一定の間隔で計測データを取得して表示データ蓄積メモリに蓄積するように構成される。
【0019】
本発明のシステムの好ましい実施の形態においては、前記拡張ユニットには、計測データの取得蓄積、解析、判定、出力の各処理を実現するためのファームウェアを上位装置からダウンロードするためのダウンロード処理手段が具備されている。
【0020】
本発明の拡張ユニットは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインとを有する連装式変位センサシステムに適用される拡張ユニットである。この拡張ユニットは、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットに、アンプユニットと同様に、伝送ラインに接続して連装される。
【0021】
この拡張ユニットには、前記計測データを蓄積するための計測データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記計測データ蓄積メモリに蓄積する計測データ取得手段と、前記計測データ蓄積メモリに蓄積された一連の計測データを所定のアルゴリズムにしたがって解析するデータ解析手段と、前記データ解析手段によるデータ解析結果を判定する判定手段と、前記判定手段による判定結果に対応する制御信号を外部へと出力する出力手段と、が具備されている。
【0022】
本発明のユニットの好ましい実施の形態においては、前記計測データ取得手段は、所定のデータ取得開始条件の成立により計測データの取得を自動的に開始すると共に、所定のデータ蓄積終了条件の成立により計測データの蓄積を自動的に終了するように構成される。
【0023】
本発明のユニットの好ましい実施の形態においては、前記計測データ取得手段は、前記取得開始から蓄積終了までの間、伝送ラインを介して到来する一連の計測データを所定の間隔をおいて選択的に取得するように構成される。
【0024】
本発明ユニットの好ましい実施の形態においては、パソコン等の上位装置との間で通信可能とされている。
【0025】
本発明ユニットの好ましい実施の形態においては、前記計測データを表示データとして蓄積するための表示データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記表示データ蓄積メモリに表示データとして蓄積する表示データ取得手段と、前記表示データ蓄積メモリに蓄積された表示データを前記上位装置へとアップロードする表示データアップロード手段と、が具備されている。
【0026】
本発明ユニットの好ましい実施の形態においては、前記表示データ取得手段は、解析のための計測データ蓄積期間とは無関係に、解析用データの取得間隔よりも粗い一定の間隔で計測データを取得して表示データ蓄積メモリに蓄積するように構成される。
【0027】
本発明ユニットの好ましい実施の形態においては、計測データの取得蓄積、解析、判定、出力の各処理を実現するためのファームウェアを上位装置からダウンロードするためのダウンロード処理手段が具備されている。
【0028】
別の一面から見た本発明は、以下の構成を有する変位センサとして捉えることもできる。この変位センサには、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とを含んでいる。ここで、計測値処理部における処理は、少なくとも波形整形、特徴点抽出、演算、の3つの処理カテゴリを順に処理するものであり、各処理カテゴリは、部品化された複数の処理プログラムの中から1または2以上の処理プログラムを選択可能であり、各選択した処理プログラムの実行順序の指定によって処理アルゴリズムが定められる、ようになっている。ここで言う「変位センサ」には、連装式のみならず、スタンドアローン型の変位センサも含まれるほか、アンプ分離型のみならず、アンプ一体型のものも含まれる。
【0029】
好ましい実施の形態においては、計測値処理部における処理が、トリガ制御、波形整形、特徴点抽出、演算、判定、外部設定出力の各処理カテゴリを順に処理するものであってもよい。
【0030】
好ましい実施の形態においては、計測値処理部には、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または2以上の処理プログラムを読み出して実行する計測段階別プログラム実行手段とが含まれていてもよい。
【0031】
別の一面から見た本発明は、以下の構成を有する連装式変位センサシステムとして捉えることもできる。この連装式変位センサシステムは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有し、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、拡張ユニットが伝送ラインに接続して連装される。前記拡張ユニットには、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とが含まれている。
【0032】
計測値処理部における処理は、少なくとも波形整形、特徴点抽出、演算、の3つの処理カテゴリを順に処理するものであり、各処理カテゴリは、部品化された複数の処理プログラムの中から1または2以上の処理プログラムを選択可能であり、各選択した処理プログラムの実行順序の指定によって処理アルゴリズムが定められる。
【0033】
別の一面から見た本発明は、以下の構成を有する拡張ユニットとして捉えることもできる。この拡張ユニットは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインとを有する連装式変位センサシステムに適用されるものであって、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットに対して、アンプユニットと同様にして、接続して連装される。この拡張ユニットには、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とが含まれており、計測値処理部における処理は、少なくとも波形整形、特徴点抽出、演算、の3つの処理カテゴリを順に処理するものであり、各処理カテゴリは、部品化された複数の処理プログラムの中から1または2以上の処理プログラムを選択可能であり、各選択した処理プログラムの実行順序の指定によって処理アルゴリズムが定められる。
【0034】
別の一面から見た本発明は、以下の構成を有する変位センサシステムとして捉えることもできる。この変位センサシステムは、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とを有する変位センサと、変位センサと通信を介して結ばれたパソコン等の上位装置とを含んでいる。上位装置は、表示器と処理プログラム設定部とを有し、処理プログラム設定部は、処理プログラム設定に必要な情報を表示器に表示させるための表示処理を実行するものであり、かつその表示処理は、処理カテゴリを少なくとも波形整形、特徴点抽出、演算の3つの処理をこの順序で一覧表示する処理と、各処理カテゴリについて、処理プログラムを処理実行順序に登録可能な処理プログラムナンバー欄を表示する処理と、各処理カテゴリごとに処理プログラム候補一覧を表示する処理と、を含んでおり、変位センサの計測値処理部は、処理プログラムナンバー欄に登録された処理プログラムを処理カテゴリの並びの順、かつ、各処理カテゴリについては処理プログラムナンバー順に登録された処理プログラムにより計測値の処理を実行する。
【0035】
好ましい実施の形態においては、変位センサには、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段とが含まれていてもよい。
【0036】
本発明の連装式変位センサシステムの拡張ユニットの好ましい実施の形態においては、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段と、を具備していてもよい。
【0037】
このような構成によれば、実行すべき処理プログラムの識別情報および実行順序が入力されることにより、記憶手段に記憶された処理プログラムの中から実行すべき処理プログラムが選択されて計測段階別に実行される。計測段階別に1または複数の処理プログラムを記憶しているので、計測段階別に処理プログラムを選択する自由度が大きく、所望の計測アルゴリズムを自在に構築することができる。
【0038】
好ましい実施の形態においては、入力手段は、パソコン等の上位装置からの通信を受け付けることが可能とされていてもよい。このような構成によれば、計測段階別に実行すべき処理プログラムの識別情報および実行順序を容易に入力することができる。
【0039】
好ましい実施の形態においては、処理プログラムは、所定のパラメータが設定可能に構成されていてもよい。このような構成によれば、計測アルゴリズムを多様化することができる。また、処理プログラムのパラメータのみを変更できるので、計測アルゴリズムを変更することなくユーザの所望する計測に近づけることができる。
【0040】
好ましい実施の形態においては、上位装置には、計測段階別に実行すべきプログラムを登録したり、削除したりすることが可能であり、且つ、プログラムのパラメータの設定を変更可能である第1の設定方式と、プログラムのパラメータの設定を変更可能である第2の設定方式とが備えられていてもよい。
【0041】
このような構成によれば、第1の設定方式を熟達者用の管理者モードとして、第2の設定方式を初心者用のユーザモードとすることができる。これにより、初心者用のユーザモードにおいては処理プログラムの選択ができないようになっているので、初心者のユーザが計測アルゴリズムを誤って変更して元に戻せなくなるといったことを予防することができる。
【0042】
好ましい実施の形態においては、上位装置から受け付けた処理プログラムの識別情報およびその実行順序を記憶する書換え可能な記憶手段をさらに備えていてもよい。このような構成によれば、多彩な計測アルゴリズムを記憶するように対応することができる。この場合、処理プログラムの内容そのものを書き換えることなく、上位装置から受け付けた処理プログラムの識別情報およびその実行順序を変更するだけなので、変更に要する時間を短縮できる。
【0043】
本発明のシステムの好ましい実施の形態においては、所定の計測アルゴリズムが書き換え可能な記憶手段に記憶されているように構成されていてもよい。このような構成によれば、初心者のユーザでも手軽に所望の計測を行うことができる。また、予め格納された計測アルゴリズムを変更して新たな計測アルゴリズムを構築することができる。
【0044】
好ましい実施の形態においては、計測段階には、外部からの信号またはセルフトリガに応じて計測処理の開始および終了を規定する第1のステップと、検出端が出力する波形データからノイズを除去する第2のステップと、整形された波形から特徴点を抽出する第3のステップと、抽出された特徴点に基づいて所定の演算を実行する第4のステップと、が含まれていてもよい。このような構成によれば、検出端が出力する波形データからユーザが所望するデータを取り出すことができ、使い勝手がよくなる。
【0045】
別の一面から見た本発明は、以下の構成を有する連装式センサシステムとしてと捉えることもできる。この連装式センサシステムは、アンプ分離型センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有し、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、拡張ユニットが伝送ラインに接続して連装される。前記拡張ユニットには、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段と、を具備するように構成してもよい。
【発明の効果】
【0046】
以上の説明で明らかなように、この発明によれば、拡張ユニット内には計測データ蓄積メモリが設けられているため、これを一連のアンプユニット列の端部に連装すると共に、既存のデータ伝送ラインに接続し、しかる後、各ユニットを運転状態とすれば、各アンプユニットで生成された計測データが拡張ユニット内の計測データ蓄積メモリに所定のタイミングで順次蓄積記憶され、その後、この蓄積記憶された一連の計測データに基づいて所定の解析処理および判定処理が実行される結果、従前の変位センサシステムとは異なり、時間情報を含む一連の計測データに対して、所望の演算処理を実行させ、被計測対象物の情報をより精密に取得することができる。また、データ取得、データ解析、データ判定の機能を拡張ユニットの側に設けたため、アンプユニットの側には特別なメモリや高機能プログラムを組み込む必要がなくなり、アンプユニットとして汎用のものを使用しつつも、これと拡張ユニットを併用することによって、より高機能な計測を実現することができるのである。
【発明を実施するための最良の形態】
【0047】
以下に、この発明の好適な実施の一形態を添付図面を参照しながら詳細に説明する。
【0048】
本発明が適用された拡張ユニット1と1若しくは2以上の台数のアンプユニット2,2,2,…との隣接結合状態を示す斜視図が図1に示されている。同図に示されるように、拡張ユニット1とアンプユニット2とは、この例ではDINレール3を介して隣接結合状態で1列に連装される。
【0049】
この例では、拡張ユニット1のケース4とアンプユニット2のケース5とは同一の規格を有する。それらのケース4,5はDINレール3と直交する方向へやや細長い直方体形状の形態を有する。すなわち、拡張ユニット1のケース4には、前面4aと、後面4bと、左側面4cと、右側面4dと、上面4eと、底面4fとが設けられ、六面体の箱状形態を有する。
【0050】
同様に、アンプユニット2のケース5には、前面5aと、後面5bと、左側面5cと、右側面5dと、上面5eと、底面5fとが設けられ、六面体の形態を有する。
【0051】
アンプユニット2の前面5aからは、第1の電気コード6が引き出されている。この第1の電気コード6には、外部入力線、外部出力線、電源線などが含まれている。外部入力線は例えばPLC等からアンプユニット2に対して各種の指令を与えるためのものであり、外部出力線はアンプユニット2の内部で生成されたスイッチング出力やアナログ出力などを外部の例えばPLC等へ出力するためのものであり、電源線はアンプユニット2の内部回路に対する電源を供給するためのものである。
【0052】
アンプユニット2の後面5bから引き出された第2の電気コード7には後述するセンサヘッドユニット9(図2参照)との間で信号をやりとりする各種の信号線が含まれている。これらの信号線の中には、センサヘッドユニット9において生成された受光光量信号などが含まれている。この第2の電気コード7の先端には丸形コネクタ8が取り付けられている。この丸形コネクタ8は、図示しないセンサヘッド9から引き出された電気コードの先端に取り付けられた同様な丸形コネクタ13と結合される。
【0053】
変位センサ用のセンサヘッドユニットの斜視図が図2に示されている。同図に示されるセンサヘッドユニット9は、直方体状のケース10を有する。ケース10の前面側には投受光窓11が設けられ、また後面側からは電気コード12が引き出され、その先端には丸形コネクタ13が取り付けられている。そして、この丸形コネクタ13と先ほどの丸形コネクタ8とが結合される。このようにアンプ分離型の光電センサにあっては、丸形コネクタ13と丸形コネクタ8とを着脱することによって、必要に応じ、アンプユニット2とセンサヘッドユニット9とを分離することができる。なお、当業者にはよく知られているように、センサヘッドユニット9内には、図3に示されるように、光源9a、投光光学系9b、受光光学系9c、位置検出素子(PSD)9d、図示しない投光用並びに受光用回路等が内蔵されている。そして、投光用回路への入力信号や受光用回路からの出力信号等が電気コード12を流れることとなる。
【0054】
再び図1に戻って、拡張ユニット1の後面4bからは第3の電気コード14が引き出され、この第3の電気コード14の先端にはパソコン側の該当するコネクタと接続されるRS−232Cコネクタ15が取り付けられている。第3の電気コード14内には、拡張ユニット1とパソコンPCとの間でデータのやりとりを行うための通信線が含まれている。
【0055】
拡張ユニット1の前面4aからは第4の電気コード16が引き出されている。この第4の電気コード16には、外部入力線、外部出力線、電源線などが含まれている。外部入力線はこの拡張ユニット1に対して各種の指令を外部のPLC等から与えるものであり、外部出力線はこの拡張ユニット内部で生成された各種の信号(詳細は後述する)を外部のPLC等へ出力するためのものであり、電源線は拡張ユニット1の内部回路に対する電源を供給するためのものである。
【0056】
また、図から明らかなように、拡張ユニット1のケース4のサイズは、RS−232Cコネクタ15のサイズと比較して明らかなように、十分小型に設計されている。
【0057】
拡張ユニット1の上面には開閉可能な透明カバー4gが設けられている。また、この透明カバー4gの下には、当該拡張ユニット1における各種の指令操作や動作表示などを行うための操作表示部23が設けられている。
【0058】
アンプユニット2の上面にも開閉可能な透明カバー5gが設けられている。また、この透明カバー5gの下には、当該アンプユニット2における各種の指令操作や動作表示などを行うための操作表示部25が設けられている。
【0059】
図1〜図6を参照して明らかなように、拡張ユニット1のケース4は比較的小型に構成されてはいるものの、DINレール取付状態においてユーザと対面するその上面4eを有効に活用してここに操作表示部23を配置しているのである。このような操作表示部23の配置を可能としているのは、ケース4内にRS−232Cコネクタ15を無理やり組み込むことなく、このRS−232Cコネクタ15をケース4から引き出された第3の電気コード14の先端に取り付けているからである。このような構成を採用すると、RS−232Cコネクタ15に無理な力が掛かったとしても、そのような力が第3の電気コード14によって干渉されるため、本体ケース4に損傷を与えることがない。逆に、拡張ユニット1のケース4にRS−232Cコネクタ15を固定的に取り付けたとすれば、コネクタの接続離脱作業に際し、ケース4側に無理な力が掛かって、ケースを破損させたり、コネクタの接続不良を発生させたりする虞れがある。
【0060】
拡張ユニット1のケース4及びアンプユニット2のケース5の左右両側面には、図4〜図6に示されるように、スライド蓋17及びスライド蓋18が設けられている。これらのスライド蓋17,18を開くと、その内部にはコネクタ窓19が臨み、その窓の中に隣接結合コネクタ20が露出する。従って、拡張ユニット1とアンプユニット2とは相対向する側面に露出する隣接結合コネクタ20,22同士を噛み合わせることによって、電気的並びに機械的に結合される。なお、それらユニット1,2全体の固定は図4に示されるようにDINレール3を介して行われることは言うまでもない。さらに、この隣接結合コネクタ20,22は、後述する第1の伝送ライン(BB)並びに第2の伝送ライン(BS0,BS1)の双方を含んでいる。
【0061】
拡張ユニット1とアンプユニット2との隣接結合状態を示す平面図が図4に示されている。同図に示されるように、それらのユニット1,2,…2を隣接結合させると、拡張ユニット1の後面4bから引き出された第3の電気コード14とアンプユニット2の後面5bから引き出された第2の電気コード7とは同一の方向へ引き出される結果となる。他方、アンプユニット2の前面5aから引き出された第1の電気コード6と拡張ユニット1の前面4aから引き出された第4の電気コード16とは、DINレール3と直交する方向で電気コード7,6とは反対の方向へと延びる結果となる。そのため、これらのユニット1,2を制御盤の盤面などにDINレール3を介して取り付ける場合においても、電気コード6,7,14,16が機能別に整理されて引き出される結果、その取り扱いが簡便なものとなり、多数のユニットを並列に配置する場合にあっては、その結束作業が容易となる。なお、図1〜図6において、21はDINレール3との結合を行うためのDINレール嵌合溝である。
【0062】
拡張ユニット1の操作表示部23の一例を示す構成図が図7に示されている。同図に示されるように、操作表示部23には、第1の7セグメント表示器23aと、第2の7セグメント表示器23bと、4方向シフトキーを構成する左方向キー23c,上方向キー23d,右方向キー23e,下方向キー23fと、1個の押しボタンキー23gとが設けられている。これらのキー23c〜23gを適宜操作しつつ、第1並びに第2の7セグメント表示器23a,23bに様々なデータを表示させることによって、後述する解析処理の選択や設定データの選択さらには各種の操作指令を与えることができる。
【0063】
なお、以上図1〜図7を参照して説明した拡張ユニット1並びにアンプユニット2の構造は、本発明の一例に過ぎない。特に、先に説明した構造は、拡張ユニットに通信を介してパソコンを接続することを前提としている。本発明の構成はパソコンを必ずしも必須の構成とするものではない。その場合には、図8並びに図9に示されるように、RS−232Cコネクタ15並びに第3の電気コード14は存在しない。
【0064】
次に、図10,図11、及び図12を参照しながら、拡張ユニット1並びにアンプユニット2の電気的なハードウェア構成について説明する。センサシステム全体のハードウェア構成図が図10に示されている。同図に示されるように、このセンサシステムには、例えばノート型のパソコン26と、1台の拡張ユニット1と、この拡張ユニット1に順次接続された2台のアンプユニット2,2,…とが含まれている。
【0065】
パソコン26と拡張ユニット1とは、先に説明したように、コネクタ13,15並びに電気コード12,14を介して結合される(図1及び図2参照)。
【0066】
拡張ユニット1内にはドライバIC101とCPU102とEEPROM108(第1の記憶手段)とが含まれている。ドライバIC101はRS−232C通信をサポートする。CPU102には、図示しないが当該拡張ユニット1の機能を定義するファームウェアを格納するプログラムメモリと、プログラムメモリ内のファームウェアを実行するマイクロプロセッサとが含まれている。加えて、CPU102内には計測データ蓄積メモリ102a(図11参照)が含まれている。このメモリ102aには、後に詳述するように、アンプユニットから送られている計測データが所定の手順に従って蓄積記憶される。
【0067】
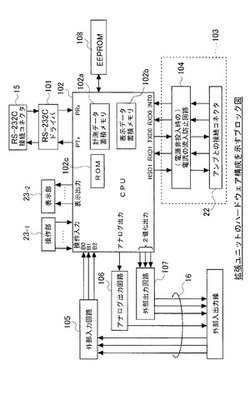
この拡張ユニット1のより詳細な内部構成を示す回路ブロック図が図11に示されている。同図に示されるように、拡張ユニット1内には、CPU102と、アンプユニット側回路ボード103と、パソコンとの通信を実現するためのRS−232Cドライバ101と、操作表示部23を構成する操作部23−1と表示部23−2と、が含まれている。また、アンプ側の回路ボード103には、アンプとの接続コネクタ(右側)22と、電流の流入防止回路(電源非投入時の)104とが含まれている。外部入力回路105は、外部入出力線を介してPLC等から到来する各種の指令を、CPU102へ入力するために使用される。アナログ出力回路106は、当該拡張ユニット1内で生成された各種のアナログ出力を外部入出力線を介して外部へと出力するためのものである。外部出力回路107は、当該拡張ユニットで生成された各種の信号をPLC等へ通ずる外部入出力線へと出力するためのものである。
【0068】
次に、図10に戻って、アンプユニット2の内部構成について説明する。各アンプユニット2の内部には、当該アンプユニットの機能を定義するファームウェアを格納するプログラムメモリと、プログラムメモリ内のファームウェアを実行するマイクロプロセッサとを含むCPU201が含まれている。各アンプユニット2内のCPU201は、伝送方向の異なる2本のシリアルバスラインBS0,BS1を介して拡張ユニット1と結ばれている。加えて、拡張ユニット1内のCPU102と、アンプユニット2内のCPU201とは、バケツリレー方式でシリアルにデータを転送するシリアル伝送ラインBBによっても順に結ばれている。
【0069】
シリアルバスラインBS0,BS1は主としてコマンドやプログラムデータの送受信などに使用されるのに対し、バケツリレー方式でデータを伝送する伝送ラインBBは、アンプユニット内で生成された計測データを各アンプユニット2から拡張ユニット1へと垂れ流し的に送り出すのに使用される。なお、この伝送ラインBBを使用したデータ転送に際しては、ハンドシェイク処理が併用される。
【0070】
アンプユニット2の内部回路のより詳細な構成が図12のブロック図に示されている。同図に示されるように、アンプユニット2の内部には、CPU201と、電流の流入防止回路(電源非投入時の)202と、アンプとの接続コネクタ(下流側)203と、電流の流入防止回路(電源非投入時の)204と、アンプとの接続コネクタ(上流側)205と、電源リセット回路206と、EEPROM207と、外部入力回路208と、アナログ出力回路209と、外部出力回路210とが含まれている。
【0071】
先に述べたように、CPU201は、図示しないが、当該アンプユニットの機能を定義するファームウェアを格納するプログラムメモリと、プログラムメモリ内のファームウェアを実行するマイクロプロセッサとを含んでいる。アナログ出力回路209は、当該アンプユニット2内で生成された各種のアナログ出力を外部入出力線を介して外部へと出力するためのものである。外部出力回路210は、当該アンプユニットで生成されたHIGH,PASS,LOWなどの判定出力を外部入出力線へと出力するものである。外部入力回路208は、外部入出力線を介して到来する各種の指令を、CPU201へ入力するために使用される。
【0072】
次に、拡張ユニット1並びにアンプユニット2のソフトウェア構成について説明する。
【0073】
アンプユニットの処理を概略的に示すフローチャートが図13に示されている。アンプユニットの処理は、同図(a)に示される通常処理と、同図(b)に示されるSH受信割込処理とを含んでいる。
【0074】
通常処理においては、同図(a)に示されるように、電源投入に続いて直ちに接続処理を実行する(ステップ1301)。この接続処理は、この種の連装型センサユニットにおいて当業者によく知られているところであり、すなわち互いに隣接して配置された一連のアンプユニットの中で、最端部に位置するアンプユニットから順にアドレスを割り付けることによって、アンプユニット列を構成する各アンプユニットのそれぞれに対して固有のアドレスを割り当て、同時に計測タイミングの同期基準点を取得して、自動的にサイクリックなパルス点灯処理を開始する。すなわち、この種の連装型変位センサシステムにおいては、隣接センサ同士の干渉を防止するため、順次時間差をもって、投受光を行う。この投受光は隣接アンプユニット間で位相差を持たせてサイクリックに行われる。
【0075】
このようにして接続処理が完了したならば、続いてキー入力受付処理(ステップ3202)並びに外部入力受付処理(ステップ1303)を実行する。キー入力受付処理(ステップ1302)では、図12に示される操作部25−1からの信号をチェックすることによって、操作部25−1において何らかのキー入力操作が行われたかどうかを判定する。外部入力受付処理(ステップ1303)では、外部入力回路208からの信号をチェックすることによって、外部入力線を介して何らかの指令が到来したかどうかを判定する。
【0076】
続く入力対応処理(ステップ1304)は、以上のステップで受け付けられたキー入力若しくは外部入力に基づいて、様々な処理を実行する。この入力対応処理の詳細については、後述する各種機能の説明の際に、それぞれ詳細なフローチャートを参照しながら説明を加えることとする。
【0077】
次に、SH受信割込処理では、同図(b)に示されるように、上流側(アンプユニット)からのSH(シェイクハンド信号)受信により割込処理で実行を開始され、まずディレイ処理(ステップ1311)を実行して、隣接センサとの投光時間差を確保する。続いて、投光処理(ステップ1312)並びに受光処理(ステップ1313)を実行して、検出対象物体に対してパルス光の照射を行い、続いて計測処理(ステップ1314)を実行する。この計測処理(ステップ1314)では、変位センサの固有アルゴリズムに従って、検出対象物体に関する計測データを取得する。
【0078】
続く計測データ転送処理(ステップ1315)では、上記の処理で得られた計測データ及び上流側のアンプユニットから受けとった計測データ群を下流側のアンプユニット又は拡張ユニットへとSH送信する。
【0079】
続く判定処理(ステップ1316)では、計測処理(ステップ1314)で得られた計測データに対し、1若しくは2以上の判定基準値を適用して所定の判定処理を行い、計測対象物体である工業製品などの製品良否の判定等を行う。この判定は例えば、LOW(低すぎ又は小さすぎ),PASS(良),HIGH(高すぎ又は大きすぎ)等として行われる。
【0080】
続く出力処理(ステップ1317)では、上記判定処理(ステップ1316)で得られた判定結果を、外部出力回路210へ与えることによって、外部出力線から判定出力を送り出す。
【0081】
次に、拡張ユニットの処理を概略的に示すフローチャートが図14に示されている。同図に示されるように、この拡張ユニットの処理の全体は、同図(a)に示される通常処理と、同図(b)に示される上位割込処理と、同図(c)に示されるSH受信割込処理とを含んでいる。
【0082】
まず、通常処理では、同図(a)に示されるように、電源投入により処理が開始され、先ほどと同様な接続処理をまず実行する(ステップ1401)。
【0083】
続いて、前記アンプユニットの場合と同様にして、キー入力受付処理(ステップ1402)並びに外部入力受付処理(ステップ1403)を実行した後、入力対応処理(ステップ1404)並びにルーチン処理(ステップ1405)を実行する。これら2つの処理(ステップ1404,1405)は、キー入力や外部入力に応じた様々な処理を実行するものであり、その詳細については後に各種の機能説明と共に説明を加える。
【0084】
上位割込処理は、同図(b)に示されるように、上位(PC,PDA)からのコマンド受信により割込にて実行を開始され、例えばパソコンからのコマンドに応じた様々な処理を実行する。この処理の中には、後に詳述するように、アプリケーションプログラムのダウンロード処理が含まれる。
【0085】
SH受信割込処理は、下位(アンプユニット)からのSH信号の受信によって割込により実行を開始されるものであり、その詳細についても、後に各種の機能説明と共に行うものとする。
【0086】
次に、本発明に関連して拡張ユニットが実行するデータ蓄積・解析処理のゼネラルフローチャートが図15に示されている。同図に示されるように、このゼネラルフローチャートに示される処理の全体は、初期処理(ステップ1501)、データ取得開始待ち処理(ステップ1502)、データ取得中処理(ステップ1503)、データ解析処理(ステップ1504)から構成されている。
【0087】
初期処理(ステップ1501)は、アンプ機種情報・設定内容の取得、アンプ設定変更、出力状態・表示状態の初期化等を実行する処理である。
【0088】
続くデータ取得開始待ち処理(ステップ1502)では、データ取得の開始タイミング(セルフトリガ/外部入力)を監視する。このデータ取得開始待ち処理(ステップ1502)の詳細が、図16(a)に示されている。同図に示されるように、データ取得開始待ち処理が開始されると、計測データ入力処理(ステップ1601)を実行しつつ、データ取得開始条件の成立を繰り返し判定する(ステップ1602)。このときのデータ取得開始条件は、入力された計測データそれ自体の大きさあるいは変化等に基づいてセルフトリガ方式で行っても良いし、外部入力受付処理(ステップ1403)で受け付けられた外部入力の状態に基づいて行っても良い。ここで、計測データ入力処理(ステップ1601)およびデータ取得開始条件の成立を判定する処理(ステップ1602)は、図14(c)に示されるSH受信割込処理(ステップ1421)において実行される。すなわち、各アンプユニット2,2からはそれぞれ投受光のたびに計測処理(ステップ1314)が実行されて計測データが生成され、こうして得られた計測データは、伝送ラインBBをバケツリレー方式で順次転送されて、拡張ユニット1内のCPU102へと辿り着く。こうして図14(c)に示されるSH受信割込処理(ステップ1421)が実行されて、アンプユニット2からの計測データがCPU102へと計測データ入力処理で取り込まれ(ステップ1601)、しかる後、データ取得開始条件を満たすかどうかの判定処理(ステップ1602)が実行されて、セルフトリガ又は外部入力に基づきデータ取得の開始タイミングが決定されるのである。こうして、データ取得開始条件の成立が判定されると(ステップ1602YES)、続いてデータ取得中処理(ステップ1503)が実行される。
【0089】
データ取得中処理(ステップ1503)の詳細が図16(b)に示されている。同図に示されるように、データ取得中処理が開始されると、データ取得中又は計測中を示す表示灯をONさせる(ステップ1611)。これにより、拡張ユニットの表示部23−2には、該当する表示動作が行われる。続いて、データ蓄積終了条件の成立が判定される(ステップ1612)。ここで、当初はデータ蓄積終了条件は成立しないから、この判定結果は否定され(ステップ1612NO)、続いて前回のデータ取得から所定時間が経過したかどうかの判定が行われる(ステップ1613)。この判定処理は、一定時間間隔でデータを取得するためのものである。すなわち、図11に示される計測データ蓄積メモリ102aの容量は限られているため、この容量に見合った量だけ計測データを取得するために、計測データ蓄積メモリがオーバーフローしないように、伝送ラインBBを介して到来する一連の計測データを間引いているのである。つまり、所定時間が経過するまでは(ステップ1613NO)、データ蓄積終了条件の成立および所定時間の経過が繰り返し判定され(ステップ1612,1613)、所定時間の経過と共に(ステップ1613YES)、そのときメモリ102aに空きがあることを条件として(ステップ1614YES)、入力された計測データの蓄積が行われる(ステップ1615)。以上が繰り返される結果、伝送ラインBBを経由して到来する一連の計測データは所定時間間隔で取得され、順次計測データ蓄積メモリ102a内へと蓄積記憶されていき、計測データ蓄積メモリが満杯となるか(ステップ1614NO)、あるいはそれ以前に所定のデータ蓄積終了条件が満たされれば(ステップ1612)、入力計測データの蓄積処理(ステップ1615)はスキップされて、以後データ解析処理への移行が行われる。
【0090】
図15へ戻って、データ解析処理(ステップ1504)では、蓄積されたデータを処理し、判定結果を出力する。このデータ解析処理(ステップ1504)の詳細が図16(c)に示されている。同図において処理が開始されると、所定のアルゴリズムに従って計測データ蓄積メモリ102aに格納された一連の計測データに基づいてデータ解析処理が実行される(1621)。このデータ解析処理(ステップ1621)では、一般的には、計測データ蓄積メモリ102aに格納された一連の計測データに対して平均化処理を行ってノイズ成分を除去した後、予め決められたアルゴリズムに従って特徴点抽出処理が実行され、こうして得られた特徴点に基づいて所定の演算を実行することにより、目的とする情報が求められる。続いて、こうして得られたデータ解析結果は、所定のしきい値と比較されて判定処理が行われ、判定結果が出力される(ステップ1622)。しかる後、先ほど点灯したデータ取得又は計測中表示はOFFされて、データ解析処理は終了する。
【0091】
このようにして、拡張ユニットのCPU102内の計測データ蓄積メモリ102aには、各アンプユニット2,2から伝送ラインBBを介して到来する計測データが、データ蓄積終了条件が満たされるまで(ステップ1612)又はメモリ容量に空きがなくなるまで(ステップ1614)順次に蓄積記憶されていくのである。しかる後、データ解析処理(ステップ1621)および判定結果出力処理(ステップ1622)が実行されることによって、計測データ蓄積メモリ102a内に格納された一連の計測データに基づき所望のデータ解析処理が行われ、しかる後、判定結果出力処理(ステップ1622)が実行されることによって、拡張ユニット側の外部出力回路107を介して外部入出力線へと制御信号が出力されるのである。従って、この実施形態によれば、従前のアンプユニットそのものに複雑なデータ解析処理や判定結果出力処理を組み込むことなく、単にアンプユニット2に隣接して拡張ユニット1を連装するだけで、時間情報を含む一連の計測データに基づく複雑なデータ解析並びに判定処理を実現可能とするのである。
【0092】
加えて、この実施形態においては、拡張ユニット1とパソコン26とは通信可能とされているため、図15および図16に示される初期処理(ステップ1501)、データ取得開始待ち処理(ステップ1502)、データ取得中処理(ステップ1503)およびデータ解析処理(ステップ1504)を含むファームウェアそのものを、パソコン26から拡張ユニット1へとダウンロードして、ユーザの現場において、最適なファームウェアを拡張ユニット1内へ組み込むこともできる。加えて、この実施形態においては、拡張ユニット1側からパソコン26側へと一連の表示用計測データをアップロード可能としているため、パソコン26を拡張ユニット1へと接続し、計測データを拡張ユニット1からパソコン26へと吸い上げることによって、計測状況をリアルタイムに確認しながら、画面上で変位データ列を見ながら最適なしきい値を設定並びに設定変更できるという効果もある。
【0093】
すなわち、図18のフローチャートに示されるように、拡張ユニット1側においては、センサ接続処理を実行し、通信割り込み待ち、PCからの通信受信待ち、センサからの垂れ流しデータ受信待ちの状態となる(ステップ1801)。この状態において、パソコン26から拡張ユニット1に対して何らかのコマンドが到来し、PC受信割込処理が開始されると、まず受信コマンドの解析を行った後(ステップ1811)、その内容に従ってアプリケーションダウンロード処理(ステップ1813)又は表示データアップロード処理(ステップ1815)のいずれかが実行される。すなわち、受信コマンドを解析した結果(ステップ1811)、それがプログラムダウンロード要求と判定されると(ステップ1812)、アプリケーションダウンロード処理が実行されて(ステップ1813)、パソコン26から拡張ユニット1内のプログラムメモリ(例えばフラッシュメモリ)内へと、図15および図16に示される一連の処理(ステップ1501〜1504)に相当するファームウェアプログラムがダウンロードされるのである。従って、この機能を利用すれば、一連のアンプユニット2に連続して拡張ユニット1を連装し、この拡張ユニット1にパソコン26を接続した後、パソコン26側から所定のプログラムダウンロード要求コマンドを送信すれば、これが拡張ユニット1側において確認されて(ステップ1812)、アプリケーションダウンロード処理(ステップ1813)が実行される結果、所望のデータ解析処理に相当するファームウェアプログラムをパソコン26から拡張ユニット1へとダウンロードさせることができるのである。
【0094】
次に、拡張ユニット1から逆にパソコン26へと一連の表示用計測データをアップロードするための動作について説明する。
【0095】
図11に示されるように、拡張ユニットのCPU102内には計測データ蓄積メモリ102aの他に表示データ蓄積メモリ102bが設けられている。この表示データ蓄積メモリ102bには、後に詳細に説明するように、伝送ラインBBを介して到来する一連の計測データの中から所定時間間隔で取得された計測データが表示用計測データとして蓄積記憶される。この表示用蓄積データメモリ102bに格納される計測データは、図17に示されるように、計測用データ蓄積タイミングよりもかなり粗い表示用データ蓄積タイミングでサンプルされた後格納される。すなわち、表示用データ蓄積メモリ102bは通信ラインを介してパソコン26へとアップロードされるものであるから、パソコン26と拡張ユニット1との間の通信がRS−232Cで行われていることを考慮すると、高速伝送のためにはデータ量を制限する必要がある。そのため、図17(a)の表示用データ蓄積タイミングは同図(b)に示される計測用データ蓄積タイミングよりも間隔が広く設定されるのである。尚、図において(c)は計測データ蓄積条件の成立有無を示している。すなわち、計測データ蓄積条件(c)が成立して"H"状態になると、その期間に限り、同図(b)に示されるように、計測用データの蓄積が行われ、一方計測データ蓄積条件の成立有無に関係なく、表示用データ蓄積タイミングについては、全期間について一定の粗いサンプリングタイミングを以てデータを蓄積し、これを表示データ蓄積メモリ102bへと格納するのである。このように、表示用データ蓄積メモリ102b内には、搬送ライン上を送られてくる物品が変位センサの視野内に入って計測が開始されている状態のみならず、対象物品が到来する前後も含めて、全区間における表示用データが蓄積されるのである。そのため、これをパソコン26へとアップロードすれば、パソコン26側においては、対象物品が変位センサの視野内へと到来する前後の状況を表示画面を介して視認しながら、計測データの時間的変位をリアルタイムで確認し、画面上において計測データの大きさを微細に確認することによって、最適なしきい値を見つけ出すことができるのである。
【0096】
本発明の変位センサシステムに好適なアプリケーションの具体的な一例を示す説明図が図19に示されている。この例にあっては、同図(a)に示されるようにワークWと変位センサのセンサヘッド9とを相対的に移動させ、こうして得られた一連の変位データを計測データ蓄積メモリ102aに先に説明した手順を経て蓄積記憶させ、しかる後、同図(b)に示されるようにこれを解析することによって、各時間領域TA,TB別にピーク値P1,P2およびボトム値B1,B2を求め、それらの差をとることによって、特定の領域における段差を判別しようとするものである。
【0097】
すなわち、この例にあっては、測定値が所定のトリガレベルL3を下回る期間内において、所定時間を隔てた2つの期間TA,TBをデータ蓄積期間として設定するようにしている。尚、この実施例のトリガレベルL3は、ワークW内の最も高い面に対応する測定値に基づき設定される。この実施例では、前記各データ蓄積期間TA,TB毎に、その期間内に蓄積されたデータの中から最大値と最小値とを求めている。図中、P1,B1はそれぞれ期間TAにおける最大値,最小値に対応する。又、P2,B2はそれぞれ期間TBにおける最大値,最小値に対応する。このシステムにおいては、各期間TA,TB毎にその期間内の最大値と最小値との差を求めることができる。又、期間TAにおける最大値P1と期間TBにおける最小値B2との差hを求めるなど、期間TA,TBの双方のデータを用いた演算処理を実行することができる。
【0098】
従来の変位センサでは、所定の計測期間中に得た測定値の最大値や最小値をホールドする機能を具備するものの、複数の測定値を保持する機能を備えていないので、最も高い面と最も低い面との間の距離を計測できるにとどまっていた。このため、図19(a)のようなワークWについて、各段差を詳細に計測するには、複数のセンサを使用する必要があった。これに対し、この実施例によれば、ワークWがセンサヘッド9の検出領域を通過する期間に得られる測定データの中から計測目的に応じた期間をデータ蓄積期間として設定することにより、目的とする計測処理を実行することができる。よって、単独のセンサヘッド9を用いて従来よりも詳細な計測処理を行うことができる。
【0099】
データ取得および解析動作を説明するタイミングチャートが図20に示されている。同図に示されるように、まずデータ取得条件が成立すると、その期間にデータの取得が行われ、データの取得が完了するのを待ってデータの解析が行われ、データ取得およびデータ解析の全期間にわたってデータ取得/計測中表示灯が点灯し、こうしてデータ取得およびデータ解析が終了するのを待って、判定出力が生成される。
【0100】
次に、図21に示すような連装式変位センサシステムを説明する。この連装式変位センサシステムでは、N個のアンプユニット2が連装されると共に(図では1個)、拡張ユニット1がパソコン26に接続されている。このシステムでは、N個のセンサ出力が拡張ユニット1に送られ、計測処理結果がパソコン26の表示部26aに表示される。また、パソコン26から拡張ユニット1に対して各種設定が行われる。また、例えば、トレイ28に収納された計測対象物27に対してセンサヘッドユニット9からレーザ光を照射することにより、計測対象物27の個数の計測が行われる。このとき、波形表示領域26bに計測対象物の変位波形29が表示され、カウント現在値表示領域26cに現在のカウント数が表示される。
【0101】
本実施形態のセンサシステムに組み込まれる計測アルゴリズムの概念を説明するための説明図が図22に示されている。拡張ユニット1はN個のアンプユニットの出力301に所定の計測処理302を施し、判定結果303をパソコン26に出力する。計測処理302は、時系列的に配列された6つの計測段階(以下カテゴリと称す)に分けられている。すなわち、それら6つの計測段階とは、外部からの信号またはセルフトリガに応じて計測処理の開始および終了を規定するためのトリガ制御カテゴリ311(第1のステップ)、センサヘッドユニットが出力する波形データからノイズを除去するための波形整形カテゴリ312(第2のステップ)、整形された波形から特徴点を抽出する特徴点抽出カテゴリ313(第3のステップ)、抽出された特徴点に基づいて所定の演算を実行する演算カテゴリ314(第4のステップ)、演算結果と所定のしきい値とによって、整形された波形に対して所定の判定処理を実行するための判定カテゴリ315(第5のステップ)、判定結果を外部に出力するための外部出力設定カテゴリ316(第6のステップ)の6つである。
【0102】
パソコン26の操作により、トリガ制御カテゴリ311には、トリガ制御処理プログラム群321から選択された処理プログラムが割り当てられる。処理プログラムは、計測アルゴリズムの構成要素であり、計測アルゴリズムが部品化されたものである。詳細は後述するが、図22に示す例では、トリガ制御カテゴリ311には、処理プログラム「STトリガモード」が設定されている。同様に、波形整形処理プログラム群322、特徴点抽出処理プログラム群323、演算処理プログラム群324、判定処理プログラム群325、および外部出力設定処理プログラム群326から選択された1つ又は複数の処理プログラムが各処理カテゴリ312〜316に割り当てられる。そして、処理カテゴリ312〜316に割り当てられた処理プログラムが計測アルゴリズムを形成し、処理プログラムが順次実行されて計測処理が行われる。
【0103】
図11に示されるように、拡張ユニットのCPU102内には計測データ蓄積メモリ102a、表示データ蓄積メモリ102bの他にROM102c(記憶手段)が設けられている。このROM102cには、複数の処理プログラムが、予め多様な計測処理に対応してライブラリ化されて格納されている。1つの計測処理を行う場合、ライブラリからカテゴリに対応した処理プログラムが1つ又は複数選択されて実行順序が設定される。波形整形カテゴリ312の処理プログラムは波形整形処理プログラム、特徴点抽出カテゴリ313の処理プログラムは計測処理プログラム、演算カテゴリ314の処理プログラムは演算処理プログラム、判定カテゴリ315の処理プログラムは判定処理プログラム、外部出力設定カテゴリ316の処理プログラムは出力処理プログラムと呼ぶ。
【0104】
拡張ユニット1のEEPROM108(書き換え可能な記憶手段)には、実行すべき計測アルゴリズムを構成する処理プログラムの実行順序と、処理プログラムの情報(識別情報)が設定される。ROM102cの内容とEEPROM108の内容とから、処理プログラムの実行順序と実行アドレスとから成る計測処理テーブルがCPU102内のRAMに作成され、この計測処理テーブルに基づいて計測処理が実行される。
【0105】
EEPROM108に処理プログラムの実行順序を設定する前に、本実施形態のセンサシステムを用いて、どのような状況で測定対象物のどのような測定項目を測定するかというニーズに合わせて、ユーザは特徴量の抽出方法や演算式を検討しておくようにする。
【0106】
検討された内容に従って、パソコン上でカテゴリ別に処理プログラム群の中から所望の処理プログラム(特徴量の抽出方法や演算式に関するプログラム等)が選択され、実行すべき処理プログラムとして設定される。このときの設定を説明するための説明図が図23に示されている。図23に示す表では、(a)処理カテゴリ名、(b)処理プログラムナンバー、(c)処理プログラム一覧が示されている。各処理カテゴリには、1または複数の処理プログラム登録領域(ナンバー0〜9)が用意されている。例えば、波形整形カテゴリには4個まで処理プログラムを登録することができ、特徴点抽出カテゴリには10個まで処理プログラムを登録することができる。処理プログラムナンバーは処理プログラムの処理手順を示している。すなわち、図23に示す例では、まず、トリガ制御カテゴリのナンバー0の処理プログラムが実行され、次に、波形整形カテゴリのナンバー0の処理プログラム、ナンバー1の処理プログラム、ナンバー2の処理プログラム、ナンバー3の処ププログラムが順次実行され、続いて、以下同様に特徴点抽出カテゴリのナンバー0の処理プログラム等が実行される。(c)処理プログラム一覧の欄は、カテゴリ別に処理プログラムの登録候補を例示している。各カテゴリでは、(c)の欄から選択された処理プログラムが、(b)の欄の処理プログラムナンバーに対応づけて設定される。
【0107】
図22に戻って、図22では、例えばトリガ制御カテゴリ311には、トリガ制御処理プログラム群321から選択された処理プログラムとして「STトリガモード」が設定されている。同様に、波形整形カテゴリに処理プログラムとして、「移動平均」および「メディアン」が設定されている。また、特徴点抽出カテゴリに処理プログラム「ピーク/ボトム」、演算カテゴリに処理プログラム「2点段差」および「2点長さ」、判定カテゴリに処理プログラム「演算式0の判定」および「演算式1の判定」が設定されている。
【0108】
処理プログラム「STトリガモード」は、計測にタイミング入力が必要で、蓄積処理を必要としない場合を表し、1計測に要する時間は計測周期となる。処理プログラム「移動平均」は、設定した回数で平均した値を算出する処理であり、計測周期毎にデータを1つずつずらして処理を行うものである。処理プログラム「メディアン」は、設定したフィルタサイズ(対象データ数)の中心値を出力する処理であり、計測周期毎にデータを1つずつずらして処理を行うものである。処理プログラム「ピーク/ボトム」は、波形データの中から演算で使用する特徴点としてピークとボトムを抽出する処理である。処理プログラム「2点段差」および「2点長さ」は、この場合、それぞれ、ピークとボトムの高低差、ピークとボトムの水平位置の差を求める演算を行う処理である。処理プログラム「演算式0の判定」は、演算式0の演算結果を所定のしきい値と比較してHIGH、PASS、LOWなどの判定を下す処理である。なお、外部出力設定カテゴリに割り当てられる4つの処理プログラムは、外部出力用に用意されたDO0〜DO3の4出力に対して、出力すべき判定結果の割り当てや出力条件の設定を行う処理を実行するものである。
【0109】
計測アルゴリズムを構成する処理プログラムを設定するとき、パソコン26上に表示される画面例が図24に示されている。この画面では、処理カテゴリ表示領域2401、処理プログラム表示領域2402、パラメータ表示領域2403、設定値表示領域2404が設けられている。図示するように、1つの処理プログラムには、いくつかのパラメータが備わっており、パラメータの設定値を変更することにより詳細な設定が可能となっている。例えば処理プログラム「移動平均」には、パラメータとして、「平均回数」、および「対象アンプユニットチャンネル」が設けられており、パラメータの設定値が変更できるように構成されている。
【0110】
本実施形態のセンサシステムは、パソコン26から計測アルゴリズムを構成する処理プログラムを設定する際に、管理者モードによる設定と、ユーザモードによる設定とが行えるように構成されている。ユーザモードは、初心者のユーザ用であり、管理者モードは設定操作に精通したユーザ用である。管理者モードでは、所定の計測アルゴリズム全体を考慮して、処理プログラムを選択して処理手順に登録したり、削除したりすることが可能であり、且つ、処理プログラムのパラメータ値を変更することのできる設定が実行できる(第1の設定方式)。一方、ユーザモードでは、処理プログラムのパラメータ値を変更する設定だけが実行できる(第2の設定方式)。
【0111】
具体的には、管理者モードでは、図24に示す画面例の処理プログラム表示領域2402、パラメータ表示領域2403、設定値表示領域2404の各欄を変更することができる。また、ユーザモードでは、図24に示す設定画面例の設定値表示領域2404の欄のみを変更することができる。このように初心者用のユーザモードでは処理プログラムの登録および削除ができないので、初心者のユーザがアルゴリズムを誤って変更して元に戻せなくなるといったことを予防することができる。
【0112】
本実施形態のセンサシステムでは、計測アルゴリズムを構成する処理プログラムの登録、処理プログラムのパラメータ設定等を一から行わなくてもよいように、所定の計測処理を想定した複数のアルゴリズム(アプリケーションメニュー)が予めEEPROM108に格納されている。図24に示す画面でアプリケーションメニューボタン2405を押すと、図25に示されるような画面が表示される。図25に示す画面表示例では、メニュー表示/設定領域2501と、設定確認ボタン2502とが設けられている。
【0113】
この例では、アプリケーションメニューとして、カウントメニュー、継ぎ目メニュー、偏心メニュー、突起高さメニュー、移動幅メニュー、ねじれメニュー、平坦度メニュー、段差メニューが備えられている。
【0114】
カウントメニューは、ワーク(計測対象物)の個数カウント用メニューであり、例えば容器や封筒等の個数・枚数カウントに適用される。
【0115】
継ぎ目メニューは、微小な段差や継ぎ目検出用のメニューであり、例えばテープの継ぎ目やベルト上の繊維ひげ等の検出に適用される。具体的には、移動しているワークの変位信号からノイズ成分・うねりを除去し、段差部(あるいは、継ぎ目・エッジ・異物・欠け・割れなど)を抽出する。
【0116】
偏心メニューは、回転ワークの偏心計測用メニューであり、例えばローラや回転ギヤ等の偏心計測に適用される。
【0117】
突起高さメニューは、ワークの突起や溝の高さ計測用メニューであり、例えばリベットの打ち込み量や電子部品の高さ寸法等の計測に適用される。具体的には、移動しているワークの突起部(あるいは溝部)とその前後の計3点の高さデータから突起部(あるいは溝部)の高さを求める。
【0118】
移動幅メニューは、ワークの突起や溝の幅計測用メニューであり、例えばコンベア上のワーク間隔や建材の幅等の計測に適用される。これは、移動しているワークの変位信号があらかじめ設定したエッジレベルを横切るときに取得する交点の間隔からワークの突起部(あるいは溝部)の幅を求めるものである。
【0119】
ねじれメニューは、ワーク面内のねじれ計測用メニューであり、アンプユニットを4台用いて、例えば鋼板やディスク面等のねじれ検査に適用される。これは、静止しているワーク面内4隅の表面高さを4台のセンサヘッドユニットで計測し、その高さデータの差からねじれ量を求めるものである。
【0120】
平坦度メニューは、ワーク面内の平坦度計測用メニューであり、例えばロボットアームやブレーキパッド等の平坦度検査に適用される。これは、静止しているワークの同一面内の表面高さを3〜5台のセンサヘッドユニットで計測し、その高さデータの最大値と最小値の差からワークの平坦度を求めるものである。
【0121】
段差メニューは、ワーク面どうしの段差計測用メニューであり、例えば金型やHDDシャーシ等の突起・凹み寸法検査に適用される。これは、静止しているワークの基準面と計測対象面の表面高さを3〜5台のセンサヘッドユニットで計測し、基準面と各計測対象面の高さデータの差から各ワーク面の段差を求めるものである。
【0122】
本実施形態のセンサシステムは、上記アプリケーションメニューをサンプルとして、処理プログラムのパラメータの設定値等を変更することでユーザに最適な計測アルゴリズムを手軽に作成することが可能である。なお、新規に作成したアルゴリズムをメニューに登録することもできる。
【0123】
次に、カテゴリ別に処理プログラムが設定された計測アルゴリズムを実行するときの拡張ユニット1の動作を説明する。拡張ユニット1の処理を示すゼネラルフローチャートが図26に示されている。
【0124】
電源投入により処理が開始されると、イニシャル処理等の起動時処理(ステップ2601)が行われた後、上位のアンプユニット2からの割込により計測値が最新のものに更新されたか否かが判別される(ステップ2602)。
【0125】
計測値が最新のものに更新されたときには、計測処理テーブルの内容(処理プログラムの実行順序と実行アドレスとの対応テーブル)に従って、波形整形処理プログラム実行時処理(ステップ2603)、蓄積データ格納(ステップ2604)、計測処理プログラム実行時処理(ステップ2605)、演算処理プログラム実行時処理(ステップ2606)、判定処理プログラム実行時処理(ステップ2607)、出力処理プログラム実行時処理(ステップ2608)が逐次実行される。
【0126】
起動時処理(ステップ2601)の詳細が図27のフローチャートにより示されている。起動時処理においては、ハードウェア初期化処理(ステップ2701)が実行された後、CPU102内のROM102cに格納された処理プログラム情報(処理プログラム番号(識別情報)、処理プログラム内容、実行アドレス)が取得され(ステップ2702)、処理プログラム番号と実行アドレスとの対応テーブルが作成される(ステップ2703)。
【0127】
続いて、EEPROM108内に記憶された設定内容が読み出される(ステップ2704)。この設定内容は、処理プログラムの実行順序と処理プログラム番号との対応テーブルである。
【0128】
次に、処理プログラムの実行順序と実行アドレスとの対応テーブル(計測処理テーブル)が作成される(ステップ2705)。
【0129】
続いて、処理プログラムを実行するときに使用するためのRAM領域が確保される(ステップ2706)。この領域には設定パラメータと計測結果が展開される。
【0130】
計測値受信割込時処理は、図28に示されるように、アンプユニット2(上位)からの計測値受信により割込にて実行を開始され、受信データを、N個のアンプユニット2に対応したNチャンネル(CH)に振り分ける処理がなされる(ステップ2801)。そして、チャンネル別の計測値格納領域に格納される計測値が最新の計測値に更新される(ステップ2802)。
【0131】
外部からのコマンド受信による割込時処理は、図29に示されるように、外部からのコマンド受信により割込にて実行を開始され、まず、外部からのコマンドを解析する処理がなされる(ステップ2901)。そして、コマンドの内容が、「処理プログラムの登録または削除」、「設定パラメータ変更」、「セーブ」のいずれであるかが判別される(ステップ2902)。
【0132】
コマンドが「処理プログラムの登録または削除」である場合、処理プログラムの実行順序と処理プログラム番号との対応テーブル(ステップ2704でEEPROM108より読み出されるテーブル)が再生成される(ステップ2903)。続いて、処理プログラムの実行順序と実行アドレスとの対応テーブル(計測処理テーブル)が再生成され(ステップ2904)、処理プログラムを実行するときに使用するためのRAM領域が確保される(ステップ2905)。
【0133】
コマンドが「設定パラメータ変更」である場合、システムの設定パラメータまたは処理プログラムの設定パラメータが変更される(ステップ2906)。ここで、システムの設定パラメータとしては、例えば、アンプユニット2の接続台数などが挙げられる。
【0134】
コマンドが「セーブ」である場合、RAMの内容がEEPROM108に保存される(ステップ2907)。保存される内容はシステムの設定パラメータなどのデータ、処理プログラムの実行順序テーブル、処理プログラムの設定パラメータなどである。
【0135】
各処理プログラムの実行時処理のフローチャートが図30に示されている。図30(a)に示されるフローチャートは、波形整形処理プログラム実行時処理(ステップ2603)、演算処理プログラム実行時処理(ステップ2606)、判定処理プログラム実行時処理(ステップ2607)、出力処理プログラム実行時処理(ステップ2608)、および逐次型の計測処理プログラム実行時処理(ステップ2605)を表している。
【0136】
処理が開始されると、この処理プログラムの設定パラメータが参照される(ステップ3001)。次いで、上流の処理プログラムの計測値が参照される(ステップ3002)。例えば演算処理プログラム実行時には、波形整形処理プログラムの計測値を参照する。続いて、処理プログラム別に計測処理を実行する(ステップ3003)。最後に、計測値をRAMに格納する(ステップ3004)。
【0137】
計測処理プログラム実行時処理(ステップ2605)では、逐次型処理のほか蓄積型処理が実行される。この蓄積型処理のフローチャートが図30(b)に示されている。処理が開始されると、処理プログラムの設定パラメータが参照される(ステップ3005)。次いで、計測データ蓄積メモリ102aに蓄積されている蓄積データが参照される(ステップ3006)。続いて、処理プログラム別に計測処理を実行する(ステップ3007)。最後に、計測値をRAMに格納する(ステップ3008)。
【0138】
次に、本システムによりセンシングされた「変位と時間」による2次元データ(変位波形)が、ユーザの求めるデータに加工される様子を説明する。波形整形処理プログラム実行時処理(ステップ2603)には、「平均処理」、「メディアン」の各処理プログラムが選択され、計測処理プログラム実行時処理(ステップ2605)には、「トップ」の処理プログラムが選択され、演算処理プログラム実行時処理(ステップ2606)には、「2点段差」、「2点長さ」の各処理プログラムが選択されているものとする。センサヘッドユニット9がセンシングにより取得した、図31の参照符号(a)で示される生波形データは、波形整形処理プログラム実行時処理(ステップ2603)により、ノイズが除去される。そして、同図(b)で示される波形データが求められる。これに、計測処理プログラム実行時処理(ステップ2605)が行われると、同図(c)で示されるように、特徴点としてトップT1,T2が抽出される。さらに、演算処理プログラム実行時処理(ステップ2606)が行われると、同図(d)で示されるように、トップT1,T2の2点段差Dと、2点長さLとが求められる。そして、データD,Lに対して判定・出力が実行され、ユーザの求めるデータが得られる。
【0139】
次に、計測処理プログラム実行時処理(ステップ2605)において、逐次処理と蓄積処理とが併用される場合の処理の一例として断面積測定アプリケーションを説明する。
【0140】
平板表面に突起部(三角形状)3201を有するワーク3202を図32に示されるように、ローラ3203上に載置して、ローラ3203を回転させてワーク3202を移動させたときに、上方に配置された本実施形態の変位センサ3204からレーザを照射して、突起部3201のピークおよび断面積を測定する場合を想定する。
【0141】
この場合、計測アルゴリズムを構成する特徴点抽出カテゴリおよび演算カテゴリに、「ピーク値」と「断面積」に関する処理プログラムおよびパラメータが設定される。突起部3201の断面積Sの演算式は、ピーク高さh、エッジレベルu、左エッジ位置(時間データ)a、右エッジ位置(時間データ)b、ワーク移動速度wとするとき、次式(1)で示される。
【0142】
S=(h−u)×(b−a)×w×0.5・・・(1)
【0143】
ワーク3202は図中左に移動することにより上下に振動するので、振動による誤差を考慮してエッジレベルuを正確に算出するために、トリガがオンしてから所定時間経過した位置Pでエッジ基準レベルv(位置Pでのエッジレベル)を取得し、これに補正値zを加えた量を演算式で用いるエッジレベルuとする。
【0144】
ピーク高さh、エッジレベルuは逐次型計測処理により求められ、左エッジ位置a、右エッジ位置bは蓄積型計測処理により求められる。このときの計測タイミングチャートが図33に示されている。
【0145】
図33の参照符号aで示されるタイミング入力がオン(トリガオン)するタイミングt1で、計測データ(ワークと変位センサとの距離に対応)の蓄積が開始される。この最中に参照符号cで示される演算結果1(ピーク値)は逐次的に更新され続け、参照符号aで示されるタイミング入力がオフ(トリガオフ)するタイミングt2でピーク値が確定する。タイミングt2〜t3の間で、左エッジ位置aおよび右エッジ位置bが確定し、参照符号eで示される演算結果2(断面積)の計測処理が実行され、それにより突起部3201の断面積Sが算出される。算出された断面積Sが所定のHIGHしきい値を超えると、参照符号fで示される判定結果はLOWの判定出力からPASSの判定出力に切り替わる。なお、トリガオンは、別に設けた光電センサのオン信号やセルフトリガにより検出される。
【0146】
同様に、時刻t4でトリガオンしたときには、トリガオフする時刻t5まで計測データが蓄積される。この間、参照符号cで示される演算結果1(ピーク値)は逐次的に更新され続け、時刻t5にピーク値が確定する。時刻t5〜t6の間で、左エッジ位置aおよび右エッジ位置bが確定し、参照符号eで示される演算結果2(断面積)の計測処理が実行され、それにより断面積Sが算出される。算出された断面積Sが所定のLOWしきい値とHIGHしきい値との間にある場合、参照符号fで示される判定結果はPASSの判定出力からHIGHの判定出力に切り替わる。なお、時刻t7に、参照符号bで示されるリセット入力のオンにより判定結果はオフされる。
【0147】
上述した断面積測定アプリケーションでは、計測データの蓄積が行われている最中に逐次型計測処理が実行されるので、蓄積型計測処理だけが実行される場合に比べて計測処理に要する時間を短縮することができる。
【0148】
尚、上記実施形態のセンサシステムは、一例として変位センサから構成されるものとしたが、本発明はこれに限定されるものではなく、例えば、近接センサ、測長センサ等から構成されるようにしてもよい。
【0149】
以上説明したように、本実施形態のセンサシステムによれば、計測アルゴリズムが部品化されており、処理カテゴリの実行順序に対応させて、部品化された処理プログラムを組み合わせることにより数多くのアルゴリズムを自在に構築することが可能になる。また、所定のアプリケーションメニューを予め備えているので、初心者のユーザにも使い勝手がよい。さらに、逐次型計測処理と蓄積型計測処理を併用することにより計測時間を短縮することができるという利点がある。
【図面の簡単な説明】
【0150】
【図1】拡張ユニット(外部入出力線、及びRS232Cケーブル付)とアンプユニットとの隣接結合状態を示す斜視図である。
【図2】変位センサ用のセンサヘッドユニットの斜視図である。
【図3】変位センサの計測原理の説明図である。
【図4】拡張ユニット(外部入出力線及びRS232Cケーブル付)とアンプユニットとの隣接結合状態を示す平面図である。
【図5】拡張ユニット(外部入出力線付)とアンプとの分離状態を示す斜視図である。
【図6】拡張ユニットの説明図である。
【図7】拡張ユニットの操作・表示部の構成図である。
【図8】拡張ユニット(外部入出力線付)とアンプユニットとの隣接結合状態を示す斜視図である。
【図9】拡張ユニット(外部入出力線付)とアンプユニットとの隣接結合状態を示す平面図である。
【図10】センサシステム全体のハードウェア構成図である。
【図11】拡張ユニットのハードウェア構成を示すブロック図である。
【図12】アンプユニットのハードウェア構成を示すブロック図である。
【図13】アンプユニットの処理を概略的に示すフローチャートである。
【図14】拡張ユニットの処理を概略的に示すフローチャートである。
【図15】本発明に関連して拡張ユニットが実行するデータ蓄積・解析処理のゼネラルフローチャートである。
【図16】図15の各部の詳細フローチャートである。
【図17】データ蓄積タイミングの説明図である。
【図18】PCコマンドの対応処理を示すフローチャートである。
【図19】アプリケーションの具体的な一例を示す説明図である。
【図20】データ取得および解析動作を説明するタイミングチャートである。
【図21】連装式変位センサシステムの構成図である。
【図22】本実施形態の計測処理全体の説明図である。
【図23】処理プログラムの登録方法を説明するための説明図である。
【図24】処理プログラムとパラメータの設定画面を示す説明図である。
【図25】アプリケーションメニューの画面を示す説明図である。
【図26】拡張ユニットの処理を示すゼネラルフローチャートである。
【図27】起動時処理の詳細を示すフローチャートである。
【図28】計測値受信割込時処理を示すフローチャートである。
【図29】外部からのコマンド受信による割込時処理を示すフローチャートである。
【図30】各処理プログラムの実行時処理を示すフローチャートである。
【図31】変位波形が加工される様子を説明するための説明図である。
【図32】断面積測定アプリケーションを説明するための説明図である。
【図33】断面積測定アプリケーションの計測タイミングチャートである。
【符号の説明】
【0151】
1 拡張ユニット
2 アンプユニット
3 DINレール
4 拡張ユニットのケース
4a 拡張ユニットのケース前面
4b 拡張ユニットのケース後面
4c 拡張ユニットのケース左側面
4d 拡張ユニットのケース右側面
4e 拡張ユニットのケース上面
4f 拡張ユニットのケース底面
4g 拡張ユニットのケースの透明カバー
5 アンプユニットのケース
5a アンプユニットのケース前面
5b アンプユニットのケース後面
5c アンプユニットのケース左側面
5d アンプユニットのケース右側面
5e アンプユニットのケース上面
5f アンプユニットのケース底面
5g アンプユニットのケースの透明カバー
6 第1の電気コード
7 第2の電気コード
8 丸形コネクタ
9 センサヘッドユニット
10 センサヘッドユニットのケース
11 センサヘッドユニットの投受光窓
12 電気コード
13 丸形コネクタ
14 第3の電気コード
15 RS−232Cコネクタ
16 第4の電気コード
17 スライド蓋
18 スライド蓋
19 コネクタ窓
20 隣接結合コネクタ
21 DINレール嵌合溝
22 隣接結合コネクタ
23 拡張ユニットの操作表示部
23a 第1の7セグメント表示器
23b 第2の7セグメント表示器
23c〜23g 操作キー
23−1 操作部
23−2 表示部
24 電気コード取付用クランパ
25 アンプユニットの操作表示部
25−1 操作部
25−2 表示部
26 パソコン(PC)
101 ドライバIC(RS232Cドライバ)
102 CPU
102a 計測データ蓄積メモリ
102b 表示データ蓄積メモリ
102c ROM
103 アンプユニット側回路ボード
104 電流の流入防止回路
105 外部入力回路
106 アナログ出力回路
107 外部出力回路
108 EEPROM
201 CPU
202 電流の流入防止回路
203 アンプとの接続コネクタ左側
204 電流の流入防止回路
205 アンプとの接続コネクタ右側
206 電源リセット回路
207 EEPROM1
208 外部入力回路
209 アナログ出力回路
210 外部出力回路
301 アンプユニットの出力
302 計測処理
303 判定結果
311 トリガ制御カテゴリ
312 波形整形カテゴリ
313 特徴点抽出カテゴリ313
314 演算カテゴリ
315 判定カテゴリ
316 外部出力設定カテゴリ
321 トリガ制御処理プログラム群
322 波形整形処理プログラム群
323 特徴点抽出処理プログラム群
324 演算処理プログラム
325 判定処理プログラム群
326 外部出力設定処理プログラム群
2401 処理カテゴリ表示領域
2402 処理プログラム表示領域
2403 パラメータ表示領域
2404 設定値表示領域
2405 アプリケーションメニューボタン
2501 メニュー表示/設定領域
2502 設定確認ボタン2502
3201 突起部(三角形状)
3202 ワーク
3203 ローラ
【技術分野】
【0001】
この発明は、例えばアンプ分離型変位センサを構成するアンプユニットを例えばDINレール等を介して密に連装してなる連装式変位センサシステムに適用する拡張ユニットに関する。
【背景技術】
【0002】
変位センサは、生産ラインで装置の動きを補助したり、ワークの出来上がり状態を検査したりすることで、物づくりの生産性や品質を維持・向上させることに使われる。このときのセンサによる生産ラインの各種課題の解決は、アプリケーションと呼ばれる。
【0003】
ところで、変位センサの場合、得られる情報はセンサからワークまでの変位情報のみであるため、実現できるアプリケーションが限られてしまう。そこで、ワークまたはセンサを移動させる等して時間情報をもたせると、ワークの様々な状態(ワークの個数、ワーク面の傾き、ワーク面の凹凸の大きさや形状、ワークの移動距離等)を表すデータを取得できる。この時間情報を有した変位データに何らかの加工や処理を加えることで、アプリケーションの実現が可能になり、ユーザの求めるより直接的な情報を提供できる。
【0004】
従来例として、変位センサの内部で、センシング処理の他に簡単なアプリケーション処理も行う、という構成がある。この場合、アプリケーション処理の結果表示や設定は、センサ本体で行うか、または、PCを接続して行う。また、変位センサのファームウェアを書き替え可能として、アプリケーションに対する変更自由度を向上させる従来例も知られている(特許文献1参照)。
【特許文献1】特開2003−99278公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
生産ラインのアプリケーションは生産品目、生産工程、生産者等の違いにより様々である。また、生産ラインはあらゆるメーカにおいて、日々改善がなされているため、新たなアプリケーションの発生は突然である。センサ側にその処理をもたせると、アプリケーションへの度重なる対応のたびに、センシング処理の部分を含めた広い範囲での改造が必要となる。そのため、改造コスト・納期がかかり、多くのアプリケーションに対応できなくなるし、改造によるリスクも大きい。また、将来発生するアプリケーション処理の規模は不明であり、それに対応できるようにROM容量等を大きくしておくと、センサ本体のコストがあがってしまい、アプリケーション処理自体が不要な場合でも、そのコストを上積みしてしまう。
【0006】
アプリケーション処理には、カウントや傾き計測等があり、これらは変位計のデータの後処理である。変位計には、レーザ式や磁気式等の様々な種類の変位計があり、それらを選ばない構成が望ましい。しかし、左記の従来例では、アプリケーションは同じでもセンサが違えば、新たにセンサを開発することになるため、改造コスト・納期がかかる。
【0007】
加えて、上述の従来例にあっては、センシング処理をしながら、アプリケーション処理を行うため、全体の処理が遅くなるという課題がある。
【0008】
この発明は上述の問題点に着目してなされたものであり、その目的とするところは、アンプ分離型変位センサを構成するアンプユニットに複雑なアプリケーションプログラムを組込むことなく、アンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能な連装式変位センサシステムを提供することにある。
【0009】
この発明の更に他の目的並びに作用効果については、明細書の以下の記述を参照することにより、当業者であれば容易に理解されるであろう。
【課題を解決するための手段】
【0010】
本発明の連装式変位センサシステムは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインとを有するものである。前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、拡張ユニットが伝送ラインに接続して連装される。
【0011】
この拡張ユニットには、前記計測データを蓄積するための計測データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記計測データ蓄積メモリに蓄積する計測データ取得手段と、前記計測データ蓄積メモリに蓄積された一連の計測データを所定のアルゴリズムにしたがって解析するデータ解析手段と、前記データ解析手段によるデータ解析結果を判定する判定手段と、前記判定手段による判定結果に対応する制御信号を外部へと出力する出力手段と、が具備されている。
【0012】
このような構成によれば、アンプ分離型変位センサを構成するアンプユニットに複雑なアプリケーションプログラムを組み込むことなく、アンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することができる。
【0013】
本発明システムの好ましい実施の形態においては、前記計測データ取得手段は、所定のデータ取得開始条件の成立により計測データの取得を自動的に開始すると共に、所定のデータ蓄積終了条件の成立により計測データの蓄積を自動的に終了するように構成される。このような構成によれば、データ取得開始条件及びデータ取得終了条件の設定如何で、計測データを適切に蓄積させることができる。
【0014】
本発明システムの好ましい実施の形態においては、前記計測データ取得手段は、前記取得開始から蓄積終了までの間、伝送ラインを介して到来する一連の計測データを所定の間隔をおいて選択的に取得するように構成される。このような構成によれば、解析に必要なデータ取得密度を維持しつつも計測データ蓄積メモリに容量に合わせたデータ取得が可能となる。
【0015】
本発明システムの好ましい実施の形態においては、計測データを取得するたびに各前回の演算処理結果を参照して、逐次演算処理を実行するようにしてもよい。このような構成によれば、蓄積された計測データに基づいて計測処理を実行する蓄積処理と、計測処理を逐次実行する逐次処理とを併用することができるので、蓄積処理を実行している最中に逐次処理を行うことにより、計測処理全体に要する時間を短縮することができる。
【0016】
本発明システムの好ましい実施の形態においては、前記拡張ユニットは、パソコン等の上位装置との間で通信可能とされている。このような構成によれば、パソコンのデータ処理機能を拡張ユニットの制御に反映することができる。
【0017】
本発明システムの好ましい実施の形態においては、前記拡張ユニットには、前記計測データを表示データとして蓄積するための表示データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記表示データ蓄積メモリに表示データとして蓄積する表示データ取得手段と、前記表示データ蓄積メモリに蓄積された表示データを前記上位装置へとアップロードする表示データアップロード手段と、が具備される。
【0018】
本発明システムの好ましい実施の形態においては、前記表示データ取得手段は、解析のための計測データ蓄積期間とは無関係に、解析用データの取得間隔よりも粗い一定の間隔で計測データを取得して表示データ蓄積メモリに蓄積するように構成される。
【0019】
本発明のシステムの好ましい実施の形態においては、前記拡張ユニットには、計測データの取得蓄積、解析、判定、出力の各処理を実現するためのファームウェアを上位装置からダウンロードするためのダウンロード処理手段が具備されている。
【0020】
本発明の拡張ユニットは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインとを有する連装式変位センサシステムに適用される拡張ユニットである。この拡張ユニットは、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットに、アンプユニットと同様に、伝送ラインに接続して連装される。
【0021】
この拡張ユニットには、前記計測データを蓄積するための計測データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記計測データ蓄積メモリに蓄積する計測データ取得手段と、前記計測データ蓄積メモリに蓄積された一連の計測データを所定のアルゴリズムにしたがって解析するデータ解析手段と、前記データ解析手段によるデータ解析結果を判定する判定手段と、前記判定手段による判定結果に対応する制御信号を外部へと出力する出力手段と、が具備されている。
【0022】
本発明のユニットの好ましい実施の形態においては、前記計測データ取得手段は、所定のデータ取得開始条件の成立により計測データの取得を自動的に開始すると共に、所定のデータ蓄積終了条件の成立により計測データの蓄積を自動的に終了するように構成される。
【0023】
本発明のユニットの好ましい実施の形態においては、前記計測データ取得手段は、前記取得開始から蓄積終了までの間、伝送ラインを介して到来する一連の計測データを所定の間隔をおいて選択的に取得するように構成される。
【0024】
本発明ユニットの好ましい実施の形態においては、パソコン等の上位装置との間で通信可能とされている。
【0025】
本発明ユニットの好ましい実施の形態においては、前記計測データを表示データとして蓄積するための表示データ蓄積メモリと、前記伝送ラインを介して到来する計測データを取得して前記表示データ蓄積メモリに表示データとして蓄積する表示データ取得手段と、前記表示データ蓄積メモリに蓄積された表示データを前記上位装置へとアップロードする表示データアップロード手段と、が具備されている。
【0026】
本発明ユニットの好ましい実施の形態においては、前記表示データ取得手段は、解析のための計測データ蓄積期間とは無関係に、解析用データの取得間隔よりも粗い一定の間隔で計測データを取得して表示データ蓄積メモリに蓄積するように構成される。
【0027】
本発明ユニットの好ましい実施の形態においては、計測データの取得蓄積、解析、判定、出力の各処理を実現するためのファームウェアを上位装置からダウンロードするためのダウンロード処理手段が具備されている。
【0028】
別の一面から見た本発明は、以下の構成を有する変位センサとして捉えることもできる。この変位センサには、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とを含んでいる。ここで、計測値処理部における処理は、少なくとも波形整形、特徴点抽出、演算、の3つの処理カテゴリを順に処理するものであり、各処理カテゴリは、部品化された複数の処理プログラムの中から1または2以上の処理プログラムを選択可能であり、各選択した処理プログラムの実行順序の指定によって処理アルゴリズムが定められる、ようになっている。ここで言う「変位センサ」には、連装式のみならず、スタンドアローン型の変位センサも含まれるほか、アンプ分離型のみならず、アンプ一体型のものも含まれる。
【0029】
好ましい実施の形態においては、計測値処理部における処理が、トリガ制御、波形整形、特徴点抽出、演算、判定、外部設定出力の各処理カテゴリを順に処理するものであってもよい。
【0030】
好ましい実施の形態においては、計測値処理部には、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または2以上の処理プログラムを読み出して実行する計測段階別プログラム実行手段とが含まれていてもよい。
【0031】
別の一面から見た本発明は、以下の構成を有する連装式変位センサシステムとして捉えることもできる。この連装式変位センサシステムは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有し、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、拡張ユニットが伝送ラインに接続して連装される。前記拡張ユニットには、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とが含まれている。
【0032】
計測値処理部における処理は、少なくとも波形整形、特徴点抽出、演算、の3つの処理カテゴリを順に処理するものであり、各処理カテゴリは、部品化された複数の処理プログラムの中から1または2以上の処理プログラムを選択可能であり、各選択した処理プログラムの実行順序の指定によって処理アルゴリズムが定められる。
【0033】
別の一面から見た本発明は、以下の構成を有する拡張ユニットとして捉えることもできる。この拡張ユニットは、アンプ分離型変位センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインとを有する連装式変位センサシステムに適用されるものであって、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットに対して、アンプユニットと同様にして、接続して連装される。この拡張ユニットには、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とが含まれており、計測値処理部における処理は、少なくとも波形整形、特徴点抽出、演算、の3つの処理カテゴリを順に処理するものであり、各処理カテゴリは、部品化された複数の処理プログラムの中から1または2以上の処理プログラムを選択可能であり、各選択した処理プログラムの実行順序の指定によって処理アルゴリズムが定められる。
【0034】
別の一面から見た本発明は、以下の構成を有する変位センサシステムとして捉えることもできる。この変位センサシステムは、変位計測値を取得する計測値取得部と、計測値取得部にて取得された変位計測値を処理する計測値処理部と、計測値処理部における処理結果を出力する処理結果出力部とを有する変位センサと、変位センサと通信を介して結ばれたパソコン等の上位装置とを含んでいる。上位装置は、表示器と処理プログラム設定部とを有し、処理プログラム設定部は、処理プログラム設定に必要な情報を表示器に表示させるための表示処理を実行するものであり、かつその表示処理は、処理カテゴリを少なくとも波形整形、特徴点抽出、演算の3つの処理をこの順序で一覧表示する処理と、各処理カテゴリについて、処理プログラムを処理実行順序に登録可能な処理プログラムナンバー欄を表示する処理と、各処理カテゴリごとに処理プログラム候補一覧を表示する処理と、を含んでおり、変位センサの計測値処理部は、処理プログラムナンバー欄に登録された処理プログラムを処理カテゴリの並びの順、かつ、各処理カテゴリについては処理プログラムナンバー順に登録された処理プログラムにより計測値の処理を実行する。
【0035】
好ましい実施の形態においては、変位センサには、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段とが含まれていてもよい。
【0036】
本発明の連装式変位センサシステムの拡張ユニットの好ましい実施の形態においては、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段と、を具備していてもよい。
【0037】
このような構成によれば、実行すべき処理プログラムの識別情報および実行順序が入力されることにより、記憶手段に記憶された処理プログラムの中から実行すべき処理プログラムが選択されて計測段階別に実行される。計測段階別に1または複数の処理プログラムを記憶しているので、計測段階別に処理プログラムを選択する自由度が大きく、所望の計測アルゴリズムを自在に構築することができる。
【0038】
好ましい実施の形態においては、入力手段は、パソコン等の上位装置からの通信を受け付けることが可能とされていてもよい。このような構成によれば、計測段階別に実行すべき処理プログラムの識別情報および実行順序を容易に入力することができる。
【0039】
好ましい実施の形態においては、処理プログラムは、所定のパラメータが設定可能に構成されていてもよい。このような構成によれば、計測アルゴリズムを多様化することができる。また、処理プログラムのパラメータのみを変更できるので、計測アルゴリズムを変更することなくユーザの所望する計測に近づけることができる。
【0040】
好ましい実施の形態においては、上位装置には、計測段階別に実行すべきプログラムを登録したり、削除したりすることが可能であり、且つ、プログラムのパラメータの設定を変更可能である第1の設定方式と、プログラムのパラメータの設定を変更可能である第2の設定方式とが備えられていてもよい。
【0041】
このような構成によれば、第1の設定方式を熟達者用の管理者モードとして、第2の設定方式を初心者用のユーザモードとすることができる。これにより、初心者用のユーザモードにおいては処理プログラムの選択ができないようになっているので、初心者のユーザが計測アルゴリズムを誤って変更して元に戻せなくなるといったことを予防することができる。
【0042】
好ましい実施の形態においては、上位装置から受け付けた処理プログラムの識別情報およびその実行順序を記憶する書換え可能な記憶手段をさらに備えていてもよい。このような構成によれば、多彩な計測アルゴリズムを記憶するように対応することができる。この場合、処理プログラムの内容そのものを書き換えることなく、上位装置から受け付けた処理プログラムの識別情報およびその実行順序を変更するだけなので、変更に要する時間を短縮できる。
【0043】
本発明のシステムの好ましい実施の形態においては、所定の計測アルゴリズムが書き換え可能な記憶手段に記憶されているように構成されていてもよい。このような構成によれば、初心者のユーザでも手軽に所望の計測を行うことができる。また、予め格納された計測アルゴリズムを変更して新たな計測アルゴリズムを構築することができる。
【0044】
好ましい実施の形態においては、計測段階には、外部からの信号またはセルフトリガに応じて計測処理の開始および終了を規定する第1のステップと、検出端が出力する波形データからノイズを除去する第2のステップと、整形された波形から特徴点を抽出する第3のステップと、抽出された特徴点に基づいて所定の演算を実行する第4のステップと、が含まれていてもよい。このような構成によれば、検出端が出力する波形データからユーザが所望するデータを取り出すことができ、使い勝手がよくなる。
【0045】
別の一面から見た本発明は、以下の構成を有する連装式センサシステムとしてと捉えることもできる。この連装式センサシステムは、アンプ分離型センサを構成するアンプユニットを1台若しくは2台以上に連装してなるアンプユニット列と、前記アンプユニット列を構成する各アンプユニットのそれぞれに接続され、それらアンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有し、前記アンプユニット列の中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、拡張ユニットが伝送ラインに接続して連装される。前記拡張ユニットには、計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段と、を具備するように構成してもよい。
【発明の効果】
【0046】
以上の説明で明らかなように、この発明によれば、拡張ユニット内には計測データ蓄積メモリが設けられているため、これを一連のアンプユニット列の端部に連装すると共に、既存のデータ伝送ラインに接続し、しかる後、各ユニットを運転状態とすれば、各アンプユニットで生成された計測データが拡張ユニット内の計測データ蓄積メモリに所定のタイミングで順次蓄積記憶され、その後、この蓄積記憶された一連の計測データに基づいて所定の解析処理および判定処理が実行される結果、従前の変位センサシステムとは異なり、時間情報を含む一連の計測データに対して、所望の演算処理を実行させ、被計測対象物の情報をより精密に取得することができる。また、データ取得、データ解析、データ判定の機能を拡張ユニットの側に設けたため、アンプユニットの側には特別なメモリや高機能プログラムを組み込む必要がなくなり、アンプユニットとして汎用のものを使用しつつも、これと拡張ユニットを併用することによって、より高機能な計測を実現することができるのである。
【発明を実施するための最良の形態】
【0047】
以下に、この発明の好適な実施の一形態を添付図面を参照しながら詳細に説明する。
【0048】
本発明が適用された拡張ユニット1と1若しくは2以上の台数のアンプユニット2,2,2,…との隣接結合状態を示す斜視図が図1に示されている。同図に示されるように、拡張ユニット1とアンプユニット2とは、この例ではDINレール3を介して隣接結合状態で1列に連装される。
【0049】
この例では、拡張ユニット1のケース4とアンプユニット2のケース5とは同一の規格を有する。それらのケース4,5はDINレール3と直交する方向へやや細長い直方体形状の形態を有する。すなわち、拡張ユニット1のケース4には、前面4aと、後面4bと、左側面4cと、右側面4dと、上面4eと、底面4fとが設けられ、六面体の箱状形態を有する。
【0050】
同様に、アンプユニット2のケース5には、前面5aと、後面5bと、左側面5cと、右側面5dと、上面5eと、底面5fとが設けられ、六面体の形態を有する。
【0051】
アンプユニット2の前面5aからは、第1の電気コード6が引き出されている。この第1の電気コード6には、外部入力線、外部出力線、電源線などが含まれている。外部入力線は例えばPLC等からアンプユニット2に対して各種の指令を与えるためのものであり、外部出力線はアンプユニット2の内部で生成されたスイッチング出力やアナログ出力などを外部の例えばPLC等へ出力するためのものであり、電源線はアンプユニット2の内部回路に対する電源を供給するためのものである。
【0052】
アンプユニット2の後面5bから引き出された第2の電気コード7には後述するセンサヘッドユニット9(図2参照)との間で信号をやりとりする各種の信号線が含まれている。これらの信号線の中には、センサヘッドユニット9において生成された受光光量信号などが含まれている。この第2の電気コード7の先端には丸形コネクタ8が取り付けられている。この丸形コネクタ8は、図示しないセンサヘッド9から引き出された電気コードの先端に取り付けられた同様な丸形コネクタ13と結合される。
【0053】
変位センサ用のセンサヘッドユニットの斜視図が図2に示されている。同図に示されるセンサヘッドユニット9は、直方体状のケース10を有する。ケース10の前面側には投受光窓11が設けられ、また後面側からは電気コード12が引き出され、その先端には丸形コネクタ13が取り付けられている。そして、この丸形コネクタ13と先ほどの丸形コネクタ8とが結合される。このようにアンプ分離型の光電センサにあっては、丸形コネクタ13と丸形コネクタ8とを着脱することによって、必要に応じ、アンプユニット2とセンサヘッドユニット9とを分離することができる。なお、当業者にはよく知られているように、センサヘッドユニット9内には、図3に示されるように、光源9a、投光光学系9b、受光光学系9c、位置検出素子(PSD)9d、図示しない投光用並びに受光用回路等が内蔵されている。そして、投光用回路への入力信号や受光用回路からの出力信号等が電気コード12を流れることとなる。
【0054】
再び図1に戻って、拡張ユニット1の後面4bからは第3の電気コード14が引き出され、この第3の電気コード14の先端にはパソコン側の該当するコネクタと接続されるRS−232Cコネクタ15が取り付けられている。第3の電気コード14内には、拡張ユニット1とパソコンPCとの間でデータのやりとりを行うための通信線が含まれている。
【0055】
拡張ユニット1の前面4aからは第4の電気コード16が引き出されている。この第4の電気コード16には、外部入力線、外部出力線、電源線などが含まれている。外部入力線はこの拡張ユニット1に対して各種の指令を外部のPLC等から与えるものであり、外部出力線はこの拡張ユニット内部で生成された各種の信号(詳細は後述する)を外部のPLC等へ出力するためのものであり、電源線は拡張ユニット1の内部回路に対する電源を供給するためのものである。
【0056】
また、図から明らかなように、拡張ユニット1のケース4のサイズは、RS−232Cコネクタ15のサイズと比較して明らかなように、十分小型に設計されている。
【0057】
拡張ユニット1の上面には開閉可能な透明カバー4gが設けられている。また、この透明カバー4gの下には、当該拡張ユニット1における各種の指令操作や動作表示などを行うための操作表示部23が設けられている。
【0058】
アンプユニット2の上面にも開閉可能な透明カバー5gが設けられている。また、この透明カバー5gの下には、当該アンプユニット2における各種の指令操作や動作表示などを行うための操作表示部25が設けられている。
【0059】
図1〜図6を参照して明らかなように、拡張ユニット1のケース4は比較的小型に構成されてはいるものの、DINレール取付状態においてユーザと対面するその上面4eを有効に活用してここに操作表示部23を配置しているのである。このような操作表示部23の配置を可能としているのは、ケース4内にRS−232Cコネクタ15を無理やり組み込むことなく、このRS−232Cコネクタ15をケース4から引き出された第3の電気コード14の先端に取り付けているからである。このような構成を採用すると、RS−232Cコネクタ15に無理な力が掛かったとしても、そのような力が第3の電気コード14によって干渉されるため、本体ケース4に損傷を与えることがない。逆に、拡張ユニット1のケース4にRS−232Cコネクタ15を固定的に取り付けたとすれば、コネクタの接続離脱作業に際し、ケース4側に無理な力が掛かって、ケースを破損させたり、コネクタの接続不良を発生させたりする虞れがある。
【0060】
拡張ユニット1のケース4及びアンプユニット2のケース5の左右両側面には、図4〜図6に示されるように、スライド蓋17及びスライド蓋18が設けられている。これらのスライド蓋17,18を開くと、その内部にはコネクタ窓19が臨み、その窓の中に隣接結合コネクタ20が露出する。従って、拡張ユニット1とアンプユニット2とは相対向する側面に露出する隣接結合コネクタ20,22同士を噛み合わせることによって、電気的並びに機械的に結合される。なお、それらユニット1,2全体の固定は図4に示されるようにDINレール3を介して行われることは言うまでもない。さらに、この隣接結合コネクタ20,22は、後述する第1の伝送ライン(BB)並びに第2の伝送ライン(BS0,BS1)の双方を含んでいる。
【0061】
拡張ユニット1とアンプユニット2との隣接結合状態を示す平面図が図4に示されている。同図に示されるように、それらのユニット1,2,…2を隣接結合させると、拡張ユニット1の後面4bから引き出された第3の電気コード14とアンプユニット2の後面5bから引き出された第2の電気コード7とは同一の方向へ引き出される結果となる。他方、アンプユニット2の前面5aから引き出された第1の電気コード6と拡張ユニット1の前面4aから引き出された第4の電気コード16とは、DINレール3と直交する方向で電気コード7,6とは反対の方向へと延びる結果となる。そのため、これらのユニット1,2を制御盤の盤面などにDINレール3を介して取り付ける場合においても、電気コード6,7,14,16が機能別に整理されて引き出される結果、その取り扱いが簡便なものとなり、多数のユニットを並列に配置する場合にあっては、その結束作業が容易となる。なお、図1〜図6において、21はDINレール3との結合を行うためのDINレール嵌合溝である。
【0062】
拡張ユニット1の操作表示部23の一例を示す構成図が図7に示されている。同図に示されるように、操作表示部23には、第1の7セグメント表示器23aと、第2の7セグメント表示器23bと、4方向シフトキーを構成する左方向キー23c,上方向キー23d,右方向キー23e,下方向キー23fと、1個の押しボタンキー23gとが設けられている。これらのキー23c〜23gを適宜操作しつつ、第1並びに第2の7セグメント表示器23a,23bに様々なデータを表示させることによって、後述する解析処理の選択や設定データの選択さらには各種の操作指令を与えることができる。
【0063】
なお、以上図1〜図7を参照して説明した拡張ユニット1並びにアンプユニット2の構造は、本発明の一例に過ぎない。特に、先に説明した構造は、拡張ユニットに通信を介してパソコンを接続することを前提としている。本発明の構成はパソコンを必ずしも必須の構成とするものではない。その場合には、図8並びに図9に示されるように、RS−232Cコネクタ15並びに第3の電気コード14は存在しない。
【0064】
次に、図10,図11、及び図12を参照しながら、拡張ユニット1並びにアンプユニット2の電気的なハードウェア構成について説明する。センサシステム全体のハードウェア構成図が図10に示されている。同図に示されるように、このセンサシステムには、例えばノート型のパソコン26と、1台の拡張ユニット1と、この拡張ユニット1に順次接続された2台のアンプユニット2,2,…とが含まれている。
【0065】
パソコン26と拡張ユニット1とは、先に説明したように、コネクタ13,15並びに電気コード12,14を介して結合される(図1及び図2参照)。
【0066】
拡張ユニット1内にはドライバIC101とCPU102とEEPROM108(第1の記憶手段)とが含まれている。ドライバIC101はRS−232C通信をサポートする。CPU102には、図示しないが当該拡張ユニット1の機能を定義するファームウェアを格納するプログラムメモリと、プログラムメモリ内のファームウェアを実行するマイクロプロセッサとが含まれている。加えて、CPU102内には計測データ蓄積メモリ102a(図11参照)が含まれている。このメモリ102aには、後に詳述するように、アンプユニットから送られている計測データが所定の手順に従って蓄積記憶される。
【0067】
この拡張ユニット1のより詳細な内部構成を示す回路ブロック図が図11に示されている。同図に示されるように、拡張ユニット1内には、CPU102と、アンプユニット側回路ボード103と、パソコンとの通信を実現するためのRS−232Cドライバ101と、操作表示部23を構成する操作部23−1と表示部23−2と、が含まれている。また、アンプ側の回路ボード103には、アンプとの接続コネクタ(右側)22と、電流の流入防止回路(電源非投入時の)104とが含まれている。外部入力回路105は、外部入出力線を介してPLC等から到来する各種の指令を、CPU102へ入力するために使用される。アナログ出力回路106は、当該拡張ユニット1内で生成された各種のアナログ出力を外部入出力線を介して外部へと出力するためのものである。外部出力回路107は、当該拡張ユニットで生成された各種の信号をPLC等へ通ずる外部入出力線へと出力するためのものである。
【0068】
次に、図10に戻って、アンプユニット2の内部構成について説明する。各アンプユニット2の内部には、当該アンプユニットの機能を定義するファームウェアを格納するプログラムメモリと、プログラムメモリ内のファームウェアを実行するマイクロプロセッサとを含むCPU201が含まれている。各アンプユニット2内のCPU201は、伝送方向の異なる2本のシリアルバスラインBS0,BS1を介して拡張ユニット1と結ばれている。加えて、拡張ユニット1内のCPU102と、アンプユニット2内のCPU201とは、バケツリレー方式でシリアルにデータを転送するシリアル伝送ラインBBによっても順に結ばれている。
【0069】
シリアルバスラインBS0,BS1は主としてコマンドやプログラムデータの送受信などに使用されるのに対し、バケツリレー方式でデータを伝送する伝送ラインBBは、アンプユニット内で生成された計測データを各アンプユニット2から拡張ユニット1へと垂れ流し的に送り出すのに使用される。なお、この伝送ラインBBを使用したデータ転送に際しては、ハンドシェイク処理が併用される。
【0070】
アンプユニット2の内部回路のより詳細な構成が図12のブロック図に示されている。同図に示されるように、アンプユニット2の内部には、CPU201と、電流の流入防止回路(電源非投入時の)202と、アンプとの接続コネクタ(下流側)203と、電流の流入防止回路(電源非投入時の)204と、アンプとの接続コネクタ(上流側)205と、電源リセット回路206と、EEPROM207と、外部入力回路208と、アナログ出力回路209と、外部出力回路210とが含まれている。
【0071】
先に述べたように、CPU201は、図示しないが、当該アンプユニットの機能を定義するファームウェアを格納するプログラムメモリと、プログラムメモリ内のファームウェアを実行するマイクロプロセッサとを含んでいる。アナログ出力回路209は、当該アンプユニット2内で生成された各種のアナログ出力を外部入出力線を介して外部へと出力するためのものである。外部出力回路210は、当該アンプユニットで生成されたHIGH,PASS,LOWなどの判定出力を外部入出力線へと出力するものである。外部入力回路208は、外部入出力線を介して到来する各種の指令を、CPU201へ入力するために使用される。
【0072】
次に、拡張ユニット1並びにアンプユニット2のソフトウェア構成について説明する。
【0073】
アンプユニットの処理を概略的に示すフローチャートが図13に示されている。アンプユニットの処理は、同図(a)に示される通常処理と、同図(b)に示されるSH受信割込処理とを含んでいる。
【0074】
通常処理においては、同図(a)に示されるように、電源投入に続いて直ちに接続処理を実行する(ステップ1301)。この接続処理は、この種の連装型センサユニットにおいて当業者によく知られているところであり、すなわち互いに隣接して配置された一連のアンプユニットの中で、最端部に位置するアンプユニットから順にアドレスを割り付けることによって、アンプユニット列を構成する各アンプユニットのそれぞれに対して固有のアドレスを割り当て、同時に計測タイミングの同期基準点を取得して、自動的にサイクリックなパルス点灯処理を開始する。すなわち、この種の連装型変位センサシステムにおいては、隣接センサ同士の干渉を防止するため、順次時間差をもって、投受光を行う。この投受光は隣接アンプユニット間で位相差を持たせてサイクリックに行われる。
【0075】
このようにして接続処理が完了したならば、続いてキー入力受付処理(ステップ3202)並びに外部入力受付処理(ステップ1303)を実行する。キー入力受付処理(ステップ1302)では、図12に示される操作部25−1からの信号をチェックすることによって、操作部25−1において何らかのキー入力操作が行われたかどうかを判定する。外部入力受付処理(ステップ1303)では、外部入力回路208からの信号をチェックすることによって、外部入力線を介して何らかの指令が到来したかどうかを判定する。
【0076】
続く入力対応処理(ステップ1304)は、以上のステップで受け付けられたキー入力若しくは外部入力に基づいて、様々な処理を実行する。この入力対応処理の詳細については、後述する各種機能の説明の際に、それぞれ詳細なフローチャートを参照しながら説明を加えることとする。
【0077】
次に、SH受信割込処理では、同図(b)に示されるように、上流側(アンプユニット)からのSH(シェイクハンド信号)受信により割込処理で実行を開始され、まずディレイ処理(ステップ1311)を実行して、隣接センサとの投光時間差を確保する。続いて、投光処理(ステップ1312)並びに受光処理(ステップ1313)を実行して、検出対象物体に対してパルス光の照射を行い、続いて計測処理(ステップ1314)を実行する。この計測処理(ステップ1314)では、変位センサの固有アルゴリズムに従って、検出対象物体に関する計測データを取得する。
【0078】
続く計測データ転送処理(ステップ1315)では、上記の処理で得られた計測データ及び上流側のアンプユニットから受けとった計測データ群を下流側のアンプユニット又は拡張ユニットへとSH送信する。
【0079】
続く判定処理(ステップ1316)では、計測処理(ステップ1314)で得られた計測データに対し、1若しくは2以上の判定基準値を適用して所定の判定処理を行い、計測対象物体である工業製品などの製品良否の判定等を行う。この判定は例えば、LOW(低すぎ又は小さすぎ),PASS(良),HIGH(高すぎ又は大きすぎ)等として行われる。
【0080】
続く出力処理(ステップ1317)では、上記判定処理(ステップ1316)で得られた判定結果を、外部出力回路210へ与えることによって、外部出力線から判定出力を送り出す。
【0081】
次に、拡張ユニットの処理を概略的に示すフローチャートが図14に示されている。同図に示されるように、この拡張ユニットの処理の全体は、同図(a)に示される通常処理と、同図(b)に示される上位割込処理と、同図(c)に示されるSH受信割込処理とを含んでいる。
【0082】
まず、通常処理では、同図(a)に示されるように、電源投入により処理が開始され、先ほどと同様な接続処理をまず実行する(ステップ1401)。
【0083】
続いて、前記アンプユニットの場合と同様にして、キー入力受付処理(ステップ1402)並びに外部入力受付処理(ステップ1403)を実行した後、入力対応処理(ステップ1404)並びにルーチン処理(ステップ1405)を実行する。これら2つの処理(ステップ1404,1405)は、キー入力や外部入力に応じた様々な処理を実行するものであり、その詳細については後に各種の機能説明と共に説明を加える。
【0084】
上位割込処理は、同図(b)に示されるように、上位(PC,PDA)からのコマンド受信により割込にて実行を開始され、例えばパソコンからのコマンドに応じた様々な処理を実行する。この処理の中には、後に詳述するように、アプリケーションプログラムのダウンロード処理が含まれる。
【0085】
SH受信割込処理は、下位(アンプユニット)からのSH信号の受信によって割込により実行を開始されるものであり、その詳細についても、後に各種の機能説明と共に行うものとする。
【0086】
次に、本発明に関連して拡張ユニットが実行するデータ蓄積・解析処理のゼネラルフローチャートが図15に示されている。同図に示されるように、このゼネラルフローチャートに示される処理の全体は、初期処理(ステップ1501)、データ取得開始待ち処理(ステップ1502)、データ取得中処理(ステップ1503)、データ解析処理(ステップ1504)から構成されている。
【0087】
初期処理(ステップ1501)は、アンプ機種情報・設定内容の取得、アンプ設定変更、出力状態・表示状態の初期化等を実行する処理である。
【0088】
続くデータ取得開始待ち処理(ステップ1502)では、データ取得の開始タイミング(セルフトリガ/外部入力)を監視する。このデータ取得開始待ち処理(ステップ1502)の詳細が、図16(a)に示されている。同図に示されるように、データ取得開始待ち処理が開始されると、計測データ入力処理(ステップ1601)を実行しつつ、データ取得開始条件の成立を繰り返し判定する(ステップ1602)。このときのデータ取得開始条件は、入力された計測データそれ自体の大きさあるいは変化等に基づいてセルフトリガ方式で行っても良いし、外部入力受付処理(ステップ1403)で受け付けられた外部入力の状態に基づいて行っても良い。ここで、計測データ入力処理(ステップ1601)およびデータ取得開始条件の成立を判定する処理(ステップ1602)は、図14(c)に示されるSH受信割込処理(ステップ1421)において実行される。すなわち、各アンプユニット2,2からはそれぞれ投受光のたびに計測処理(ステップ1314)が実行されて計測データが生成され、こうして得られた計測データは、伝送ラインBBをバケツリレー方式で順次転送されて、拡張ユニット1内のCPU102へと辿り着く。こうして図14(c)に示されるSH受信割込処理(ステップ1421)が実行されて、アンプユニット2からの計測データがCPU102へと計測データ入力処理で取り込まれ(ステップ1601)、しかる後、データ取得開始条件を満たすかどうかの判定処理(ステップ1602)が実行されて、セルフトリガ又は外部入力に基づきデータ取得の開始タイミングが決定されるのである。こうして、データ取得開始条件の成立が判定されると(ステップ1602YES)、続いてデータ取得中処理(ステップ1503)が実行される。
【0089】
データ取得中処理(ステップ1503)の詳細が図16(b)に示されている。同図に示されるように、データ取得中処理が開始されると、データ取得中又は計測中を示す表示灯をONさせる(ステップ1611)。これにより、拡張ユニットの表示部23−2には、該当する表示動作が行われる。続いて、データ蓄積終了条件の成立が判定される(ステップ1612)。ここで、当初はデータ蓄積終了条件は成立しないから、この判定結果は否定され(ステップ1612NO)、続いて前回のデータ取得から所定時間が経過したかどうかの判定が行われる(ステップ1613)。この判定処理は、一定時間間隔でデータを取得するためのものである。すなわち、図11に示される計測データ蓄積メモリ102aの容量は限られているため、この容量に見合った量だけ計測データを取得するために、計測データ蓄積メモリがオーバーフローしないように、伝送ラインBBを介して到来する一連の計測データを間引いているのである。つまり、所定時間が経過するまでは(ステップ1613NO)、データ蓄積終了条件の成立および所定時間の経過が繰り返し判定され(ステップ1612,1613)、所定時間の経過と共に(ステップ1613YES)、そのときメモリ102aに空きがあることを条件として(ステップ1614YES)、入力された計測データの蓄積が行われる(ステップ1615)。以上が繰り返される結果、伝送ラインBBを経由して到来する一連の計測データは所定時間間隔で取得され、順次計測データ蓄積メモリ102a内へと蓄積記憶されていき、計測データ蓄積メモリが満杯となるか(ステップ1614NO)、あるいはそれ以前に所定のデータ蓄積終了条件が満たされれば(ステップ1612)、入力計測データの蓄積処理(ステップ1615)はスキップされて、以後データ解析処理への移行が行われる。
【0090】
図15へ戻って、データ解析処理(ステップ1504)では、蓄積されたデータを処理し、判定結果を出力する。このデータ解析処理(ステップ1504)の詳細が図16(c)に示されている。同図において処理が開始されると、所定のアルゴリズムに従って計測データ蓄積メモリ102aに格納された一連の計測データに基づいてデータ解析処理が実行される(1621)。このデータ解析処理(ステップ1621)では、一般的には、計測データ蓄積メモリ102aに格納された一連の計測データに対して平均化処理を行ってノイズ成分を除去した後、予め決められたアルゴリズムに従って特徴点抽出処理が実行され、こうして得られた特徴点に基づいて所定の演算を実行することにより、目的とする情報が求められる。続いて、こうして得られたデータ解析結果は、所定のしきい値と比較されて判定処理が行われ、判定結果が出力される(ステップ1622)。しかる後、先ほど点灯したデータ取得又は計測中表示はOFFされて、データ解析処理は終了する。
【0091】
このようにして、拡張ユニットのCPU102内の計測データ蓄積メモリ102aには、各アンプユニット2,2から伝送ラインBBを介して到来する計測データが、データ蓄積終了条件が満たされるまで(ステップ1612)又はメモリ容量に空きがなくなるまで(ステップ1614)順次に蓄積記憶されていくのである。しかる後、データ解析処理(ステップ1621)および判定結果出力処理(ステップ1622)が実行されることによって、計測データ蓄積メモリ102a内に格納された一連の計測データに基づき所望のデータ解析処理が行われ、しかる後、判定結果出力処理(ステップ1622)が実行されることによって、拡張ユニット側の外部出力回路107を介して外部入出力線へと制御信号が出力されるのである。従って、この実施形態によれば、従前のアンプユニットそのものに複雑なデータ解析処理や判定結果出力処理を組み込むことなく、単にアンプユニット2に隣接して拡張ユニット1を連装するだけで、時間情報を含む一連の計測データに基づく複雑なデータ解析並びに判定処理を実現可能とするのである。
【0092】
加えて、この実施形態においては、拡張ユニット1とパソコン26とは通信可能とされているため、図15および図16に示される初期処理(ステップ1501)、データ取得開始待ち処理(ステップ1502)、データ取得中処理(ステップ1503)およびデータ解析処理(ステップ1504)を含むファームウェアそのものを、パソコン26から拡張ユニット1へとダウンロードして、ユーザの現場において、最適なファームウェアを拡張ユニット1内へ組み込むこともできる。加えて、この実施形態においては、拡張ユニット1側からパソコン26側へと一連の表示用計測データをアップロード可能としているため、パソコン26を拡張ユニット1へと接続し、計測データを拡張ユニット1からパソコン26へと吸い上げることによって、計測状況をリアルタイムに確認しながら、画面上で変位データ列を見ながら最適なしきい値を設定並びに設定変更できるという効果もある。
【0093】
すなわち、図18のフローチャートに示されるように、拡張ユニット1側においては、センサ接続処理を実行し、通信割り込み待ち、PCからの通信受信待ち、センサからの垂れ流しデータ受信待ちの状態となる(ステップ1801)。この状態において、パソコン26から拡張ユニット1に対して何らかのコマンドが到来し、PC受信割込処理が開始されると、まず受信コマンドの解析を行った後(ステップ1811)、その内容に従ってアプリケーションダウンロード処理(ステップ1813)又は表示データアップロード処理(ステップ1815)のいずれかが実行される。すなわち、受信コマンドを解析した結果(ステップ1811)、それがプログラムダウンロード要求と判定されると(ステップ1812)、アプリケーションダウンロード処理が実行されて(ステップ1813)、パソコン26から拡張ユニット1内のプログラムメモリ(例えばフラッシュメモリ)内へと、図15および図16に示される一連の処理(ステップ1501〜1504)に相当するファームウェアプログラムがダウンロードされるのである。従って、この機能を利用すれば、一連のアンプユニット2に連続して拡張ユニット1を連装し、この拡張ユニット1にパソコン26を接続した後、パソコン26側から所定のプログラムダウンロード要求コマンドを送信すれば、これが拡張ユニット1側において確認されて(ステップ1812)、アプリケーションダウンロード処理(ステップ1813)が実行される結果、所望のデータ解析処理に相当するファームウェアプログラムをパソコン26から拡張ユニット1へとダウンロードさせることができるのである。
【0094】
次に、拡張ユニット1から逆にパソコン26へと一連の表示用計測データをアップロードするための動作について説明する。
【0095】
図11に示されるように、拡張ユニットのCPU102内には計測データ蓄積メモリ102aの他に表示データ蓄積メモリ102bが設けられている。この表示データ蓄積メモリ102bには、後に詳細に説明するように、伝送ラインBBを介して到来する一連の計測データの中から所定時間間隔で取得された計測データが表示用計測データとして蓄積記憶される。この表示用蓄積データメモリ102bに格納される計測データは、図17に示されるように、計測用データ蓄積タイミングよりもかなり粗い表示用データ蓄積タイミングでサンプルされた後格納される。すなわち、表示用データ蓄積メモリ102bは通信ラインを介してパソコン26へとアップロードされるものであるから、パソコン26と拡張ユニット1との間の通信がRS−232Cで行われていることを考慮すると、高速伝送のためにはデータ量を制限する必要がある。そのため、図17(a)の表示用データ蓄積タイミングは同図(b)に示される計測用データ蓄積タイミングよりも間隔が広く設定されるのである。尚、図において(c)は計測データ蓄積条件の成立有無を示している。すなわち、計測データ蓄積条件(c)が成立して"H"状態になると、その期間に限り、同図(b)に示されるように、計測用データの蓄積が行われ、一方計測データ蓄積条件の成立有無に関係なく、表示用データ蓄積タイミングについては、全期間について一定の粗いサンプリングタイミングを以てデータを蓄積し、これを表示データ蓄積メモリ102bへと格納するのである。このように、表示用データ蓄積メモリ102b内には、搬送ライン上を送られてくる物品が変位センサの視野内に入って計測が開始されている状態のみならず、対象物品が到来する前後も含めて、全区間における表示用データが蓄積されるのである。そのため、これをパソコン26へとアップロードすれば、パソコン26側においては、対象物品が変位センサの視野内へと到来する前後の状況を表示画面を介して視認しながら、計測データの時間的変位をリアルタイムで確認し、画面上において計測データの大きさを微細に確認することによって、最適なしきい値を見つけ出すことができるのである。
【0096】
本発明の変位センサシステムに好適なアプリケーションの具体的な一例を示す説明図が図19に示されている。この例にあっては、同図(a)に示されるようにワークWと変位センサのセンサヘッド9とを相対的に移動させ、こうして得られた一連の変位データを計測データ蓄積メモリ102aに先に説明した手順を経て蓄積記憶させ、しかる後、同図(b)に示されるようにこれを解析することによって、各時間領域TA,TB別にピーク値P1,P2およびボトム値B1,B2を求め、それらの差をとることによって、特定の領域における段差を判別しようとするものである。
【0097】
すなわち、この例にあっては、測定値が所定のトリガレベルL3を下回る期間内において、所定時間を隔てた2つの期間TA,TBをデータ蓄積期間として設定するようにしている。尚、この実施例のトリガレベルL3は、ワークW内の最も高い面に対応する測定値に基づき設定される。この実施例では、前記各データ蓄積期間TA,TB毎に、その期間内に蓄積されたデータの中から最大値と最小値とを求めている。図中、P1,B1はそれぞれ期間TAにおける最大値,最小値に対応する。又、P2,B2はそれぞれ期間TBにおける最大値,最小値に対応する。このシステムにおいては、各期間TA,TB毎にその期間内の最大値と最小値との差を求めることができる。又、期間TAにおける最大値P1と期間TBにおける最小値B2との差hを求めるなど、期間TA,TBの双方のデータを用いた演算処理を実行することができる。
【0098】
従来の変位センサでは、所定の計測期間中に得た測定値の最大値や最小値をホールドする機能を具備するものの、複数の測定値を保持する機能を備えていないので、最も高い面と最も低い面との間の距離を計測できるにとどまっていた。このため、図19(a)のようなワークWについて、各段差を詳細に計測するには、複数のセンサを使用する必要があった。これに対し、この実施例によれば、ワークWがセンサヘッド9の検出領域を通過する期間に得られる測定データの中から計測目的に応じた期間をデータ蓄積期間として設定することにより、目的とする計測処理を実行することができる。よって、単独のセンサヘッド9を用いて従来よりも詳細な計測処理を行うことができる。
【0099】
データ取得および解析動作を説明するタイミングチャートが図20に示されている。同図に示されるように、まずデータ取得条件が成立すると、その期間にデータの取得が行われ、データの取得が完了するのを待ってデータの解析が行われ、データ取得およびデータ解析の全期間にわたってデータ取得/計測中表示灯が点灯し、こうしてデータ取得およびデータ解析が終了するのを待って、判定出力が生成される。
【0100】
次に、図21に示すような連装式変位センサシステムを説明する。この連装式変位センサシステムでは、N個のアンプユニット2が連装されると共に(図では1個)、拡張ユニット1がパソコン26に接続されている。このシステムでは、N個のセンサ出力が拡張ユニット1に送られ、計測処理結果がパソコン26の表示部26aに表示される。また、パソコン26から拡張ユニット1に対して各種設定が行われる。また、例えば、トレイ28に収納された計測対象物27に対してセンサヘッドユニット9からレーザ光を照射することにより、計測対象物27の個数の計測が行われる。このとき、波形表示領域26bに計測対象物の変位波形29が表示され、カウント現在値表示領域26cに現在のカウント数が表示される。
【0101】
本実施形態のセンサシステムに組み込まれる計測アルゴリズムの概念を説明するための説明図が図22に示されている。拡張ユニット1はN個のアンプユニットの出力301に所定の計測処理302を施し、判定結果303をパソコン26に出力する。計測処理302は、時系列的に配列された6つの計測段階(以下カテゴリと称す)に分けられている。すなわち、それら6つの計測段階とは、外部からの信号またはセルフトリガに応じて計測処理の開始および終了を規定するためのトリガ制御カテゴリ311(第1のステップ)、センサヘッドユニットが出力する波形データからノイズを除去するための波形整形カテゴリ312(第2のステップ)、整形された波形から特徴点を抽出する特徴点抽出カテゴリ313(第3のステップ)、抽出された特徴点に基づいて所定の演算を実行する演算カテゴリ314(第4のステップ)、演算結果と所定のしきい値とによって、整形された波形に対して所定の判定処理を実行するための判定カテゴリ315(第5のステップ)、判定結果を外部に出力するための外部出力設定カテゴリ316(第6のステップ)の6つである。
【0102】
パソコン26の操作により、トリガ制御カテゴリ311には、トリガ制御処理プログラム群321から選択された処理プログラムが割り当てられる。処理プログラムは、計測アルゴリズムの構成要素であり、計測アルゴリズムが部品化されたものである。詳細は後述するが、図22に示す例では、トリガ制御カテゴリ311には、処理プログラム「STトリガモード」が設定されている。同様に、波形整形処理プログラム群322、特徴点抽出処理プログラム群323、演算処理プログラム群324、判定処理プログラム群325、および外部出力設定処理プログラム群326から選択された1つ又は複数の処理プログラムが各処理カテゴリ312〜316に割り当てられる。そして、処理カテゴリ312〜316に割り当てられた処理プログラムが計測アルゴリズムを形成し、処理プログラムが順次実行されて計測処理が行われる。
【0103】
図11に示されるように、拡張ユニットのCPU102内には計測データ蓄積メモリ102a、表示データ蓄積メモリ102bの他にROM102c(記憶手段)が設けられている。このROM102cには、複数の処理プログラムが、予め多様な計測処理に対応してライブラリ化されて格納されている。1つの計測処理を行う場合、ライブラリからカテゴリに対応した処理プログラムが1つ又は複数選択されて実行順序が設定される。波形整形カテゴリ312の処理プログラムは波形整形処理プログラム、特徴点抽出カテゴリ313の処理プログラムは計測処理プログラム、演算カテゴリ314の処理プログラムは演算処理プログラム、判定カテゴリ315の処理プログラムは判定処理プログラム、外部出力設定カテゴリ316の処理プログラムは出力処理プログラムと呼ぶ。
【0104】
拡張ユニット1のEEPROM108(書き換え可能な記憶手段)には、実行すべき計測アルゴリズムを構成する処理プログラムの実行順序と、処理プログラムの情報(識別情報)が設定される。ROM102cの内容とEEPROM108の内容とから、処理プログラムの実行順序と実行アドレスとから成る計測処理テーブルがCPU102内のRAMに作成され、この計測処理テーブルに基づいて計測処理が実行される。
【0105】
EEPROM108に処理プログラムの実行順序を設定する前に、本実施形態のセンサシステムを用いて、どのような状況で測定対象物のどのような測定項目を測定するかというニーズに合わせて、ユーザは特徴量の抽出方法や演算式を検討しておくようにする。
【0106】
検討された内容に従って、パソコン上でカテゴリ別に処理プログラム群の中から所望の処理プログラム(特徴量の抽出方法や演算式に関するプログラム等)が選択され、実行すべき処理プログラムとして設定される。このときの設定を説明するための説明図が図23に示されている。図23に示す表では、(a)処理カテゴリ名、(b)処理プログラムナンバー、(c)処理プログラム一覧が示されている。各処理カテゴリには、1または複数の処理プログラム登録領域(ナンバー0〜9)が用意されている。例えば、波形整形カテゴリには4個まで処理プログラムを登録することができ、特徴点抽出カテゴリには10個まで処理プログラムを登録することができる。処理プログラムナンバーは処理プログラムの処理手順を示している。すなわち、図23に示す例では、まず、トリガ制御カテゴリのナンバー0の処理プログラムが実行され、次に、波形整形カテゴリのナンバー0の処理プログラム、ナンバー1の処理プログラム、ナンバー2の処理プログラム、ナンバー3の処ププログラムが順次実行され、続いて、以下同様に特徴点抽出カテゴリのナンバー0の処理プログラム等が実行される。(c)処理プログラム一覧の欄は、カテゴリ別に処理プログラムの登録候補を例示している。各カテゴリでは、(c)の欄から選択された処理プログラムが、(b)の欄の処理プログラムナンバーに対応づけて設定される。
【0107】
図22に戻って、図22では、例えばトリガ制御カテゴリ311には、トリガ制御処理プログラム群321から選択された処理プログラムとして「STトリガモード」が設定されている。同様に、波形整形カテゴリに処理プログラムとして、「移動平均」および「メディアン」が設定されている。また、特徴点抽出カテゴリに処理プログラム「ピーク/ボトム」、演算カテゴリに処理プログラム「2点段差」および「2点長さ」、判定カテゴリに処理プログラム「演算式0の判定」および「演算式1の判定」が設定されている。
【0108】
処理プログラム「STトリガモード」は、計測にタイミング入力が必要で、蓄積処理を必要としない場合を表し、1計測に要する時間は計測周期となる。処理プログラム「移動平均」は、設定した回数で平均した値を算出する処理であり、計測周期毎にデータを1つずつずらして処理を行うものである。処理プログラム「メディアン」は、設定したフィルタサイズ(対象データ数)の中心値を出力する処理であり、計測周期毎にデータを1つずつずらして処理を行うものである。処理プログラム「ピーク/ボトム」は、波形データの中から演算で使用する特徴点としてピークとボトムを抽出する処理である。処理プログラム「2点段差」および「2点長さ」は、この場合、それぞれ、ピークとボトムの高低差、ピークとボトムの水平位置の差を求める演算を行う処理である。処理プログラム「演算式0の判定」は、演算式0の演算結果を所定のしきい値と比較してHIGH、PASS、LOWなどの判定を下す処理である。なお、外部出力設定カテゴリに割り当てられる4つの処理プログラムは、外部出力用に用意されたDO0〜DO3の4出力に対して、出力すべき判定結果の割り当てや出力条件の設定を行う処理を実行するものである。
【0109】
計測アルゴリズムを構成する処理プログラムを設定するとき、パソコン26上に表示される画面例が図24に示されている。この画面では、処理カテゴリ表示領域2401、処理プログラム表示領域2402、パラメータ表示領域2403、設定値表示領域2404が設けられている。図示するように、1つの処理プログラムには、いくつかのパラメータが備わっており、パラメータの設定値を変更することにより詳細な設定が可能となっている。例えば処理プログラム「移動平均」には、パラメータとして、「平均回数」、および「対象アンプユニットチャンネル」が設けられており、パラメータの設定値が変更できるように構成されている。
【0110】
本実施形態のセンサシステムは、パソコン26から計測アルゴリズムを構成する処理プログラムを設定する際に、管理者モードによる設定と、ユーザモードによる設定とが行えるように構成されている。ユーザモードは、初心者のユーザ用であり、管理者モードは設定操作に精通したユーザ用である。管理者モードでは、所定の計測アルゴリズム全体を考慮して、処理プログラムを選択して処理手順に登録したり、削除したりすることが可能であり、且つ、処理プログラムのパラメータ値を変更することのできる設定が実行できる(第1の設定方式)。一方、ユーザモードでは、処理プログラムのパラメータ値を変更する設定だけが実行できる(第2の設定方式)。
【0111】
具体的には、管理者モードでは、図24に示す画面例の処理プログラム表示領域2402、パラメータ表示領域2403、設定値表示領域2404の各欄を変更することができる。また、ユーザモードでは、図24に示す設定画面例の設定値表示領域2404の欄のみを変更することができる。このように初心者用のユーザモードでは処理プログラムの登録および削除ができないので、初心者のユーザがアルゴリズムを誤って変更して元に戻せなくなるといったことを予防することができる。
【0112】
本実施形態のセンサシステムでは、計測アルゴリズムを構成する処理プログラムの登録、処理プログラムのパラメータ設定等を一から行わなくてもよいように、所定の計測処理を想定した複数のアルゴリズム(アプリケーションメニュー)が予めEEPROM108に格納されている。図24に示す画面でアプリケーションメニューボタン2405を押すと、図25に示されるような画面が表示される。図25に示す画面表示例では、メニュー表示/設定領域2501と、設定確認ボタン2502とが設けられている。
【0113】
この例では、アプリケーションメニューとして、カウントメニュー、継ぎ目メニュー、偏心メニュー、突起高さメニュー、移動幅メニュー、ねじれメニュー、平坦度メニュー、段差メニューが備えられている。
【0114】
カウントメニューは、ワーク(計測対象物)の個数カウント用メニューであり、例えば容器や封筒等の個数・枚数カウントに適用される。
【0115】
継ぎ目メニューは、微小な段差や継ぎ目検出用のメニューであり、例えばテープの継ぎ目やベルト上の繊維ひげ等の検出に適用される。具体的には、移動しているワークの変位信号からノイズ成分・うねりを除去し、段差部(あるいは、継ぎ目・エッジ・異物・欠け・割れなど)を抽出する。
【0116】
偏心メニューは、回転ワークの偏心計測用メニューであり、例えばローラや回転ギヤ等の偏心計測に適用される。
【0117】
突起高さメニューは、ワークの突起や溝の高さ計測用メニューであり、例えばリベットの打ち込み量や電子部品の高さ寸法等の計測に適用される。具体的には、移動しているワークの突起部(あるいは溝部)とその前後の計3点の高さデータから突起部(あるいは溝部)の高さを求める。
【0118】
移動幅メニューは、ワークの突起や溝の幅計測用メニューであり、例えばコンベア上のワーク間隔や建材の幅等の計測に適用される。これは、移動しているワークの変位信号があらかじめ設定したエッジレベルを横切るときに取得する交点の間隔からワークの突起部(あるいは溝部)の幅を求めるものである。
【0119】
ねじれメニューは、ワーク面内のねじれ計測用メニューであり、アンプユニットを4台用いて、例えば鋼板やディスク面等のねじれ検査に適用される。これは、静止しているワーク面内4隅の表面高さを4台のセンサヘッドユニットで計測し、その高さデータの差からねじれ量を求めるものである。
【0120】
平坦度メニューは、ワーク面内の平坦度計測用メニューであり、例えばロボットアームやブレーキパッド等の平坦度検査に適用される。これは、静止しているワークの同一面内の表面高さを3〜5台のセンサヘッドユニットで計測し、その高さデータの最大値と最小値の差からワークの平坦度を求めるものである。
【0121】
段差メニューは、ワーク面どうしの段差計測用メニューであり、例えば金型やHDDシャーシ等の突起・凹み寸法検査に適用される。これは、静止しているワークの基準面と計測対象面の表面高さを3〜5台のセンサヘッドユニットで計測し、基準面と各計測対象面の高さデータの差から各ワーク面の段差を求めるものである。
【0122】
本実施形態のセンサシステムは、上記アプリケーションメニューをサンプルとして、処理プログラムのパラメータの設定値等を変更することでユーザに最適な計測アルゴリズムを手軽に作成することが可能である。なお、新規に作成したアルゴリズムをメニューに登録することもできる。
【0123】
次に、カテゴリ別に処理プログラムが設定された計測アルゴリズムを実行するときの拡張ユニット1の動作を説明する。拡張ユニット1の処理を示すゼネラルフローチャートが図26に示されている。
【0124】
電源投入により処理が開始されると、イニシャル処理等の起動時処理(ステップ2601)が行われた後、上位のアンプユニット2からの割込により計測値が最新のものに更新されたか否かが判別される(ステップ2602)。
【0125】
計測値が最新のものに更新されたときには、計測処理テーブルの内容(処理プログラムの実行順序と実行アドレスとの対応テーブル)に従って、波形整形処理プログラム実行時処理(ステップ2603)、蓄積データ格納(ステップ2604)、計測処理プログラム実行時処理(ステップ2605)、演算処理プログラム実行時処理(ステップ2606)、判定処理プログラム実行時処理(ステップ2607)、出力処理プログラム実行時処理(ステップ2608)が逐次実行される。
【0126】
起動時処理(ステップ2601)の詳細が図27のフローチャートにより示されている。起動時処理においては、ハードウェア初期化処理(ステップ2701)が実行された後、CPU102内のROM102cに格納された処理プログラム情報(処理プログラム番号(識別情報)、処理プログラム内容、実行アドレス)が取得され(ステップ2702)、処理プログラム番号と実行アドレスとの対応テーブルが作成される(ステップ2703)。
【0127】
続いて、EEPROM108内に記憶された設定内容が読み出される(ステップ2704)。この設定内容は、処理プログラムの実行順序と処理プログラム番号との対応テーブルである。
【0128】
次に、処理プログラムの実行順序と実行アドレスとの対応テーブル(計測処理テーブル)が作成される(ステップ2705)。
【0129】
続いて、処理プログラムを実行するときに使用するためのRAM領域が確保される(ステップ2706)。この領域には設定パラメータと計測結果が展開される。
【0130】
計測値受信割込時処理は、図28に示されるように、アンプユニット2(上位)からの計測値受信により割込にて実行を開始され、受信データを、N個のアンプユニット2に対応したNチャンネル(CH)に振り分ける処理がなされる(ステップ2801)。そして、チャンネル別の計測値格納領域に格納される計測値が最新の計測値に更新される(ステップ2802)。
【0131】
外部からのコマンド受信による割込時処理は、図29に示されるように、外部からのコマンド受信により割込にて実行を開始され、まず、外部からのコマンドを解析する処理がなされる(ステップ2901)。そして、コマンドの内容が、「処理プログラムの登録または削除」、「設定パラメータ変更」、「セーブ」のいずれであるかが判別される(ステップ2902)。
【0132】
コマンドが「処理プログラムの登録または削除」である場合、処理プログラムの実行順序と処理プログラム番号との対応テーブル(ステップ2704でEEPROM108より読み出されるテーブル)が再生成される(ステップ2903)。続いて、処理プログラムの実行順序と実行アドレスとの対応テーブル(計測処理テーブル)が再生成され(ステップ2904)、処理プログラムを実行するときに使用するためのRAM領域が確保される(ステップ2905)。
【0133】
コマンドが「設定パラメータ変更」である場合、システムの設定パラメータまたは処理プログラムの設定パラメータが変更される(ステップ2906)。ここで、システムの設定パラメータとしては、例えば、アンプユニット2の接続台数などが挙げられる。
【0134】
コマンドが「セーブ」である場合、RAMの内容がEEPROM108に保存される(ステップ2907)。保存される内容はシステムの設定パラメータなどのデータ、処理プログラムの実行順序テーブル、処理プログラムの設定パラメータなどである。
【0135】
各処理プログラムの実行時処理のフローチャートが図30に示されている。図30(a)に示されるフローチャートは、波形整形処理プログラム実行時処理(ステップ2603)、演算処理プログラム実行時処理(ステップ2606)、判定処理プログラム実行時処理(ステップ2607)、出力処理プログラム実行時処理(ステップ2608)、および逐次型の計測処理プログラム実行時処理(ステップ2605)を表している。
【0136】
処理が開始されると、この処理プログラムの設定パラメータが参照される(ステップ3001)。次いで、上流の処理プログラムの計測値が参照される(ステップ3002)。例えば演算処理プログラム実行時には、波形整形処理プログラムの計測値を参照する。続いて、処理プログラム別に計測処理を実行する(ステップ3003)。最後に、計測値をRAMに格納する(ステップ3004)。
【0137】
計測処理プログラム実行時処理(ステップ2605)では、逐次型処理のほか蓄積型処理が実行される。この蓄積型処理のフローチャートが図30(b)に示されている。処理が開始されると、処理プログラムの設定パラメータが参照される(ステップ3005)。次いで、計測データ蓄積メモリ102aに蓄積されている蓄積データが参照される(ステップ3006)。続いて、処理プログラム別に計測処理を実行する(ステップ3007)。最後に、計測値をRAMに格納する(ステップ3008)。
【0138】
次に、本システムによりセンシングされた「変位と時間」による2次元データ(変位波形)が、ユーザの求めるデータに加工される様子を説明する。波形整形処理プログラム実行時処理(ステップ2603)には、「平均処理」、「メディアン」の各処理プログラムが選択され、計測処理プログラム実行時処理(ステップ2605)には、「トップ」の処理プログラムが選択され、演算処理プログラム実行時処理(ステップ2606)には、「2点段差」、「2点長さ」の各処理プログラムが選択されているものとする。センサヘッドユニット9がセンシングにより取得した、図31の参照符号(a)で示される生波形データは、波形整形処理プログラム実行時処理(ステップ2603)により、ノイズが除去される。そして、同図(b)で示される波形データが求められる。これに、計測処理プログラム実行時処理(ステップ2605)が行われると、同図(c)で示されるように、特徴点としてトップT1,T2が抽出される。さらに、演算処理プログラム実行時処理(ステップ2606)が行われると、同図(d)で示されるように、トップT1,T2の2点段差Dと、2点長さLとが求められる。そして、データD,Lに対して判定・出力が実行され、ユーザの求めるデータが得られる。
【0139】
次に、計測処理プログラム実行時処理(ステップ2605)において、逐次処理と蓄積処理とが併用される場合の処理の一例として断面積測定アプリケーションを説明する。
【0140】
平板表面に突起部(三角形状)3201を有するワーク3202を図32に示されるように、ローラ3203上に載置して、ローラ3203を回転させてワーク3202を移動させたときに、上方に配置された本実施形態の変位センサ3204からレーザを照射して、突起部3201のピークおよび断面積を測定する場合を想定する。
【0141】
この場合、計測アルゴリズムを構成する特徴点抽出カテゴリおよび演算カテゴリに、「ピーク値」と「断面積」に関する処理プログラムおよびパラメータが設定される。突起部3201の断面積Sの演算式は、ピーク高さh、エッジレベルu、左エッジ位置(時間データ)a、右エッジ位置(時間データ)b、ワーク移動速度wとするとき、次式(1)で示される。
【0142】
S=(h−u)×(b−a)×w×0.5・・・(1)
【0143】
ワーク3202は図中左に移動することにより上下に振動するので、振動による誤差を考慮してエッジレベルuを正確に算出するために、トリガがオンしてから所定時間経過した位置Pでエッジ基準レベルv(位置Pでのエッジレベル)を取得し、これに補正値zを加えた量を演算式で用いるエッジレベルuとする。
【0144】
ピーク高さh、エッジレベルuは逐次型計測処理により求められ、左エッジ位置a、右エッジ位置bは蓄積型計測処理により求められる。このときの計測タイミングチャートが図33に示されている。
【0145】
図33の参照符号aで示されるタイミング入力がオン(トリガオン)するタイミングt1で、計測データ(ワークと変位センサとの距離に対応)の蓄積が開始される。この最中に参照符号cで示される演算結果1(ピーク値)は逐次的に更新され続け、参照符号aで示されるタイミング入力がオフ(トリガオフ)するタイミングt2でピーク値が確定する。タイミングt2〜t3の間で、左エッジ位置aおよび右エッジ位置bが確定し、参照符号eで示される演算結果2(断面積)の計測処理が実行され、それにより突起部3201の断面積Sが算出される。算出された断面積Sが所定のHIGHしきい値を超えると、参照符号fで示される判定結果はLOWの判定出力からPASSの判定出力に切り替わる。なお、トリガオンは、別に設けた光電センサのオン信号やセルフトリガにより検出される。
【0146】
同様に、時刻t4でトリガオンしたときには、トリガオフする時刻t5まで計測データが蓄積される。この間、参照符号cで示される演算結果1(ピーク値)は逐次的に更新され続け、時刻t5にピーク値が確定する。時刻t5〜t6の間で、左エッジ位置aおよび右エッジ位置bが確定し、参照符号eで示される演算結果2(断面積)の計測処理が実行され、それにより断面積Sが算出される。算出された断面積Sが所定のLOWしきい値とHIGHしきい値との間にある場合、参照符号fで示される判定結果はPASSの判定出力からHIGHの判定出力に切り替わる。なお、時刻t7に、参照符号bで示されるリセット入力のオンにより判定結果はオフされる。
【0147】
上述した断面積測定アプリケーションでは、計測データの蓄積が行われている最中に逐次型計測処理が実行されるので、蓄積型計測処理だけが実行される場合に比べて計測処理に要する時間を短縮することができる。
【0148】
尚、上記実施形態のセンサシステムは、一例として変位センサから構成されるものとしたが、本発明はこれに限定されるものではなく、例えば、近接センサ、測長センサ等から構成されるようにしてもよい。
【0149】
以上説明したように、本実施形態のセンサシステムによれば、計測アルゴリズムが部品化されており、処理カテゴリの実行順序に対応させて、部品化された処理プログラムを組み合わせることにより数多くのアルゴリズムを自在に構築することが可能になる。また、所定のアプリケーションメニューを予め備えているので、初心者のユーザにも使い勝手がよい。さらに、逐次型計測処理と蓄積型計測処理を併用することにより計測時間を短縮することができるという利点がある。
【図面の簡単な説明】
【0150】
【図1】拡張ユニット(外部入出力線、及びRS232Cケーブル付)とアンプユニットとの隣接結合状態を示す斜視図である。
【図2】変位センサ用のセンサヘッドユニットの斜視図である。
【図3】変位センサの計測原理の説明図である。
【図4】拡張ユニット(外部入出力線及びRS232Cケーブル付)とアンプユニットとの隣接結合状態を示す平面図である。
【図5】拡張ユニット(外部入出力線付)とアンプとの分離状態を示す斜視図である。
【図6】拡張ユニットの説明図である。
【図7】拡張ユニットの操作・表示部の構成図である。
【図8】拡張ユニット(外部入出力線付)とアンプユニットとの隣接結合状態を示す斜視図である。
【図9】拡張ユニット(外部入出力線付)とアンプユニットとの隣接結合状態を示す平面図である。
【図10】センサシステム全体のハードウェア構成図である。
【図11】拡張ユニットのハードウェア構成を示すブロック図である。
【図12】アンプユニットのハードウェア構成を示すブロック図である。
【図13】アンプユニットの処理を概略的に示すフローチャートである。
【図14】拡張ユニットの処理を概略的に示すフローチャートである。
【図15】本発明に関連して拡張ユニットが実行するデータ蓄積・解析処理のゼネラルフローチャートである。
【図16】図15の各部の詳細フローチャートである。
【図17】データ蓄積タイミングの説明図である。
【図18】PCコマンドの対応処理を示すフローチャートである。
【図19】アプリケーションの具体的な一例を示す説明図である。
【図20】データ取得および解析動作を説明するタイミングチャートである。
【図21】連装式変位センサシステムの構成図である。
【図22】本実施形態の計測処理全体の説明図である。
【図23】処理プログラムの登録方法を説明するための説明図である。
【図24】処理プログラムとパラメータの設定画面を示す説明図である。
【図25】アプリケーションメニューの画面を示す説明図である。
【図26】拡張ユニットの処理を示すゼネラルフローチャートである。
【図27】起動時処理の詳細を示すフローチャートである。
【図28】計測値受信割込時処理を示すフローチャートである。
【図29】外部からのコマンド受信による割込時処理を示すフローチャートである。
【図30】各処理プログラムの実行時処理を示すフローチャートである。
【図31】変位波形が加工される様子を説明するための説明図である。
【図32】断面積測定アプリケーションを説明するための説明図である。
【図33】断面積測定アプリケーションの計測タイミングチャートである。
【符号の説明】
【0151】
1 拡張ユニット
2 アンプユニット
3 DINレール
4 拡張ユニットのケース
4a 拡張ユニットのケース前面
4b 拡張ユニットのケース後面
4c 拡張ユニットのケース左側面
4d 拡張ユニットのケース右側面
4e 拡張ユニットのケース上面
4f 拡張ユニットのケース底面
4g 拡張ユニットのケースの透明カバー
5 アンプユニットのケース
5a アンプユニットのケース前面
5b アンプユニットのケース後面
5c アンプユニットのケース左側面
5d アンプユニットのケース右側面
5e アンプユニットのケース上面
5f アンプユニットのケース底面
5g アンプユニットのケースの透明カバー
6 第1の電気コード
7 第2の電気コード
8 丸形コネクタ
9 センサヘッドユニット
10 センサヘッドユニットのケース
11 センサヘッドユニットの投受光窓
12 電気コード
13 丸形コネクタ
14 第3の電気コード
15 RS−232Cコネクタ
16 第4の電気コード
17 スライド蓋
18 スライド蓋
19 コネクタ窓
20 隣接結合コネクタ
21 DINレール嵌合溝
22 隣接結合コネクタ
23 拡張ユニットの操作表示部
23a 第1の7セグメント表示器
23b 第2の7セグメント表示器
23c〜23g 操作キー
23−1 操作部
23−2 表示部
24 電気コード取付用クランパ
25 アンプユニットの操作表示部
25−1 操作部
25−2 表示部
26 パソコン(PC)
101 ドライバIC(RS232Cドライバ)
102 CPU
102a 計測データ蓄積メモリ
102b 表示データ蓄積メモリ
102c ROM
103 アンプユニット側回路ボード
104 電流の流入防止回路
105 外部入力回路
106 アナログ出力回路
107 外部出力回路
108 EEPROM
201 CPU
202 電流の流入防止回路
203 アンプとの接続コネクタ左側
204 電流の流入防止回路
205 アンプとの接続コネクタ右側
206 電源リセット回路
207 EEPROM1
208 外部入力回路
209 アナログ出力回路
210 外部出力回路
301 アンプユニットの出力
302 計測処理
303 判定結果
311 トリガ制御カテゴリ
312 波形整形カテゴリ
313 特徴点抽出カテゴリ313
314 演算カテゴリ
315 判定カテゴリ
316 外部出力設定カテゴリ
321 トリガ制御処理プログラム群
322 波形整形処理プログラム群
323 特徴点抽出処理プログラム群
324 演算処理プログラム
325 判定処理プログラム群
326 外部出力設定処理プログラム群
2401 処理カテゴリ表示領域
2402 処理プログラム表示領域
2403 パラメータ表示領域
2404 設定値表示領域
2405 アプリケーションメニューボタン
2501 メニュー表示/設定領域
2502 設定確認ボタン2502
3201 突起部(三角形状)
3202 ワーク
3203 ローラ
【特許請求の範囲】
【請求項1】
アンプ分離型変位センサを構成するアンプユニットを1台配置若しくは2台以上に連装して配置した状態において、前記各アンプユニットのそれぞれに接続され、各アンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有する変位センサシステムに適用されるものであって、
前記アンプユニットの中で伝送ラインの下流側端部に位置するアンプユニットに対して、アンプユニットと同様にして、接続され、
計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、
計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、
入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、
計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段とを具備し、アンプユニットの計測機能を拡張する、ことを特徴とする拡張ユニット。
【請求項2】
入力手段は、パソコン等の上位装置からの通信を受け付けることが可能とされている、ことを特徴とする請求項1に記載の拡張ユニット。
【請求項3】
処理プログラムは、所定のパラメータが設定可能に構成されている、ことを特徴とする請求項1または2に記載の拡張ユニット。
【請求項4】
上位装置には、計測段階別に実行すべきプログラムを登録したり、削除したりすることが可能であり、且つ、プログラムのパラメータの設定を変更可能である第1の設定方式と、プログラムのパラメータの設定を変更可能である第2の設定方式とが備えられている、ことを特徴とする請求項2記載の拡張ユニット。
【請求項5】
上位装置から受け付けた処理プログラムの識別情報およびその実行順序を記憶する書換え可能な記憶手段をさらに備える、ことを特徴とする請求項2に記載の拡張ユニット。
【請求項6】
所定の計測アルゴリズムが書き換え可能な記憶手段に記憶されている、ことを特徴とする請求項5に記載の拡張ユニット。
【請求項7】
計測段階には、
外部からの信号またはセルフトリガに応じて計測処理の開始および終了を規定する第1のステップと、
検出端が出力する波形データからノイズを除去する第2のステップと、
整形された波形から特徴点を抽出する第3のステップと、
抽出された特徴点に基づいて所定の演算を実行する第4のステップと、
が含まれる、ことを特徴とする請求項1乃至6のいずれかに記載の拡張ユニット。
【請求項8】
アンプ分離型センサを構成するアンプユニットを1台配置若しくは2台以上に連装して配置した状態において、前記各アンプユニットのそれぞれに接続され、各アンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有し、
前記アンプユニットの中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、計測機能を拡張するための拡張ユニットが伝送ラインに接続され、
前記拡張ユニットには、
計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、
計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、
入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、
計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段とを具備する、ことを特徴とする拡張ユニット。
【請求項1】
アンプ分離型変位センサを構成するアンプユニットを1台配置若しくは2台以上に連装して配置した状態において、前記各アンプユニットのそれぞれに接続され、各アンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有する変位センサシステムに適用されるものであって、
前記アンプユニットの中で伝送ラインの下流側端部に位置するアンプユニットに対して、アンプユニットと同様にして、接続され、
計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、
計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、
入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、
計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段とを具備し、アンプユニットの計測機能を拡張する、ことを特徴とする拡張ユニット。
【請求項2】
入力手段は、パソコン等の上位装置からの通信を受け付けることが可能とされている、ことを特徴とする請求項1に記載の拡張ユニット。
【請求項3】
処理プログラムは、所定のパラメータが設定可能に構成されている、ことを特徴とする請求項1または2に記載の拡張ユニット。
【請求項4】
上位装置には、計測段階別に実行すべきプログラムを登録したり、削除したりすることが可能であり、且つ、プログラムのパラメータの設定を変更可能である第1の設定方式と、プログラムのパラメータの設定を変更可能である第2の設定方式とが備えられている、ことを特徴とする請求項2記載の拡張ユニット。
【請求項5】
上位装置から受け付けた処理プログラムの識別情報およびその実行順序を記憶する書換え可能な記憶手段をさらに備える、ことを特徴とする請求項2に記載の拡張ユニット。
【請求項6】
所定の計測アルゴリズムが書き換え可能な記憶手段に記憶されている、ことを特徴とする請求項5に記載の拡張ユニット。
【請求項7】
計測段階には、
外部からの信号またはセルフトリガに応じて計測処理の開始および終了を規定する第1のステップと、
検出端が出力する波形データからノイズを除去する第2のステップと、
整形された波形から特徴点を抽出する第3のステップと、
抽出された特徴点に基づいて所定の演算を実行する第4のステップと、
が含まれる、ことを特徴とする請求項1乃至6のいずれかに記載の拡張ユニット。
【請求項8】
アンプ分離型センサを構成するアンプユニットを1台配置若しくは2台以上に連装して配置した状態において、前記各アンプユニットのそれぞれに接続され、各アンプユニットで生成される計測データを一方向へ伝送する伝送ラインを有し、
前記アンプユニットの中で伝送ラインの下流側端部に位置するアンプユニットには、アンプユニットと同様にして、計測機能を拡張するための拡張ユニットが伝送ラインに接続され、
前記拡張ユニットには、
計測アルゴリズムが部品化された1または複数の処理プログラムをその識別情報および実行アドレスと共に、実行順序が予め定められた計測段階別に記憶する記憶手段と、
計測段階別に実行すべき処理プログラムの識別情報および実行順序を入力する入力手段と、
入力手段により入力された実行順序と記憶手段から読み出された実行アドレスとから成る計測処理テーブルを作成するテーブル作成手段と、
計測処理テーブルに基づいて、計測段階別に1または複数の処理プログラムを読み出して実行する計測段階別プログラム実行手段とを具備する、ことを特徴とする拡張ユニット。
【図1】


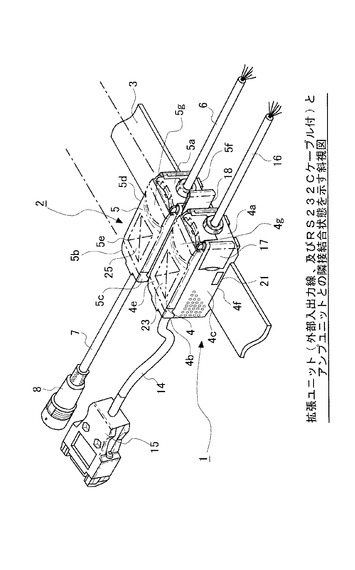
【図2】
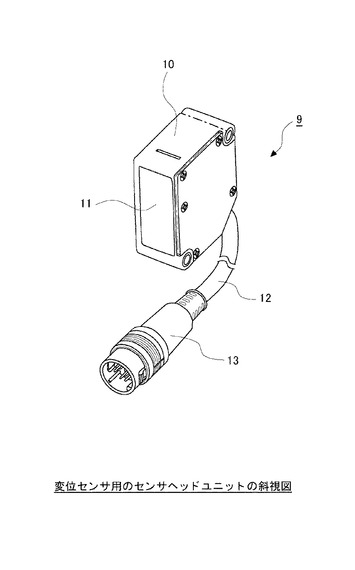
【図3】
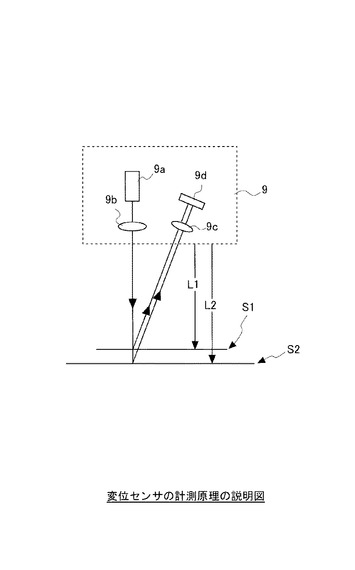
【図4】
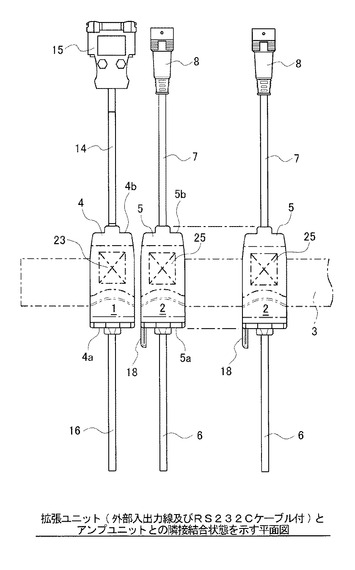
【図5】
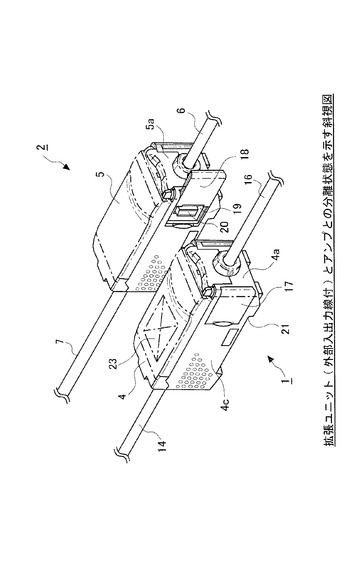
【図6】
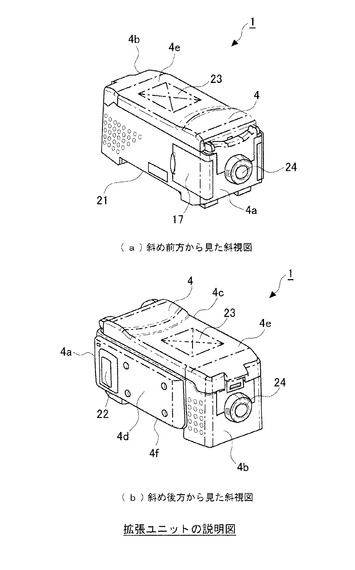
【図7】
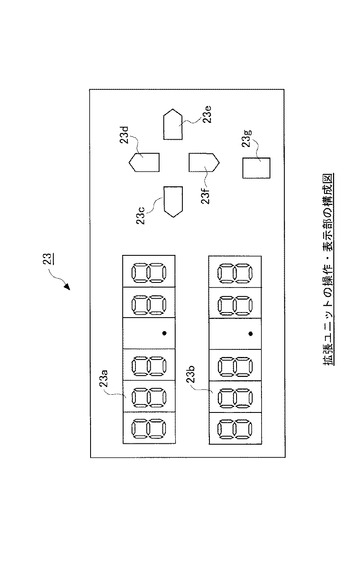
【図8】
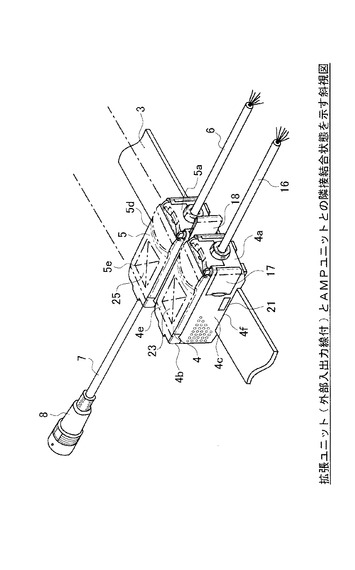
【図9】
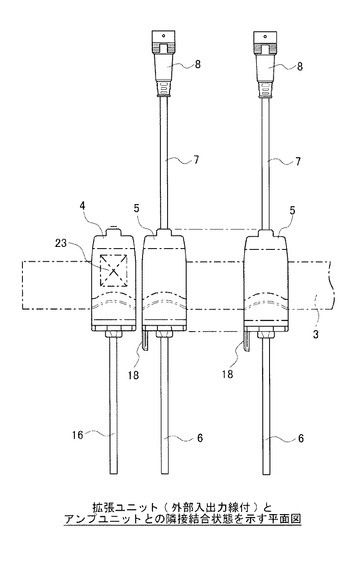
【図10】
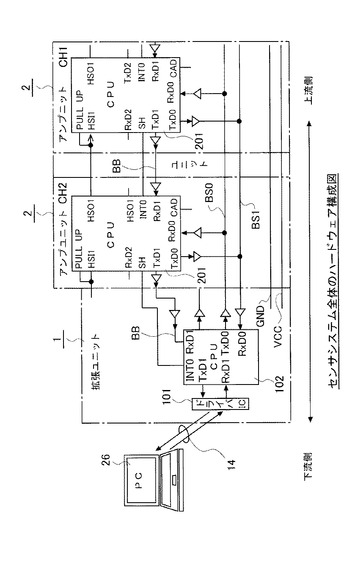
【図11】
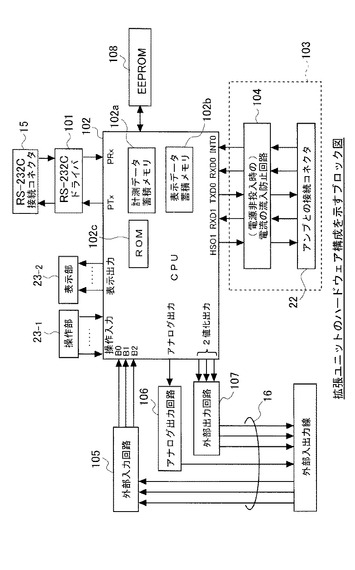
【図12】
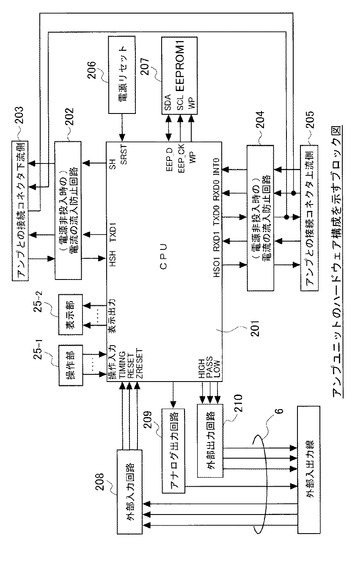
【図13】
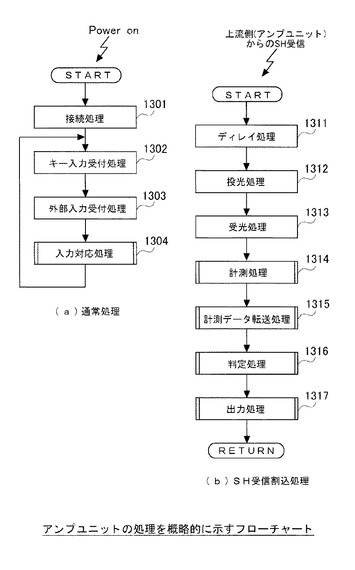
【図14】
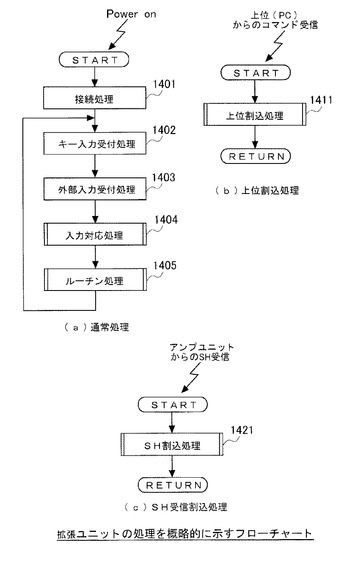
【図15】
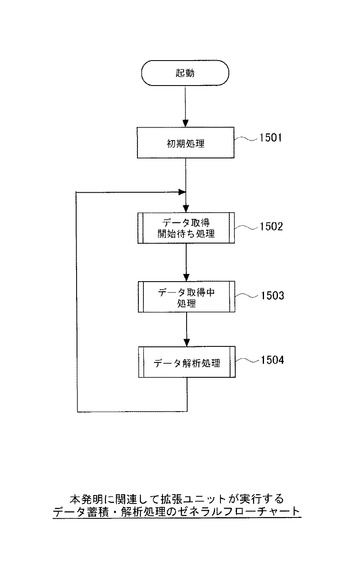
【図16】
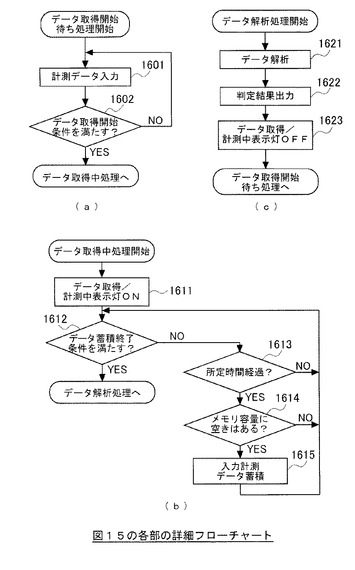
【図17】
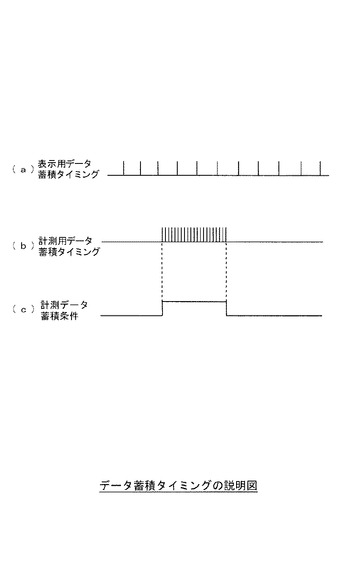
【図18】
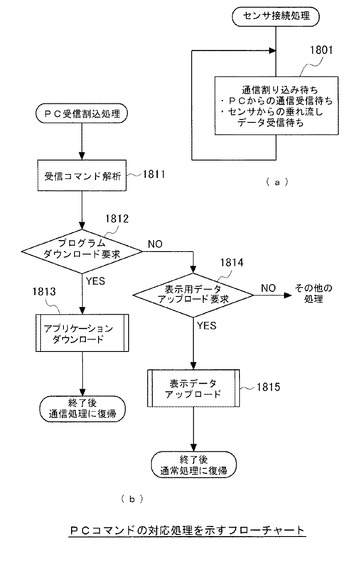
【図19】
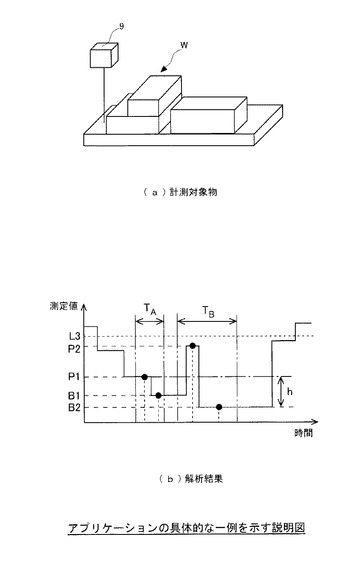
【図20】
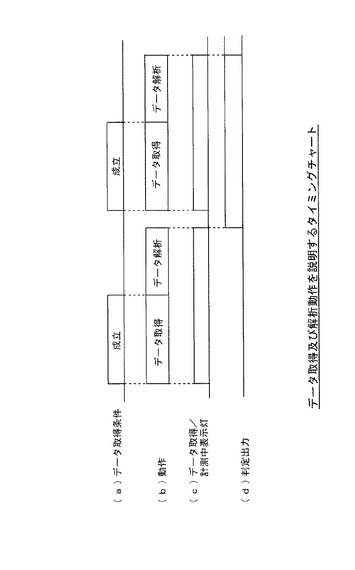
【図21】
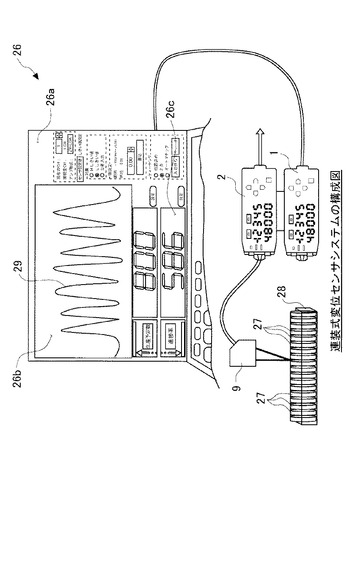
【図22】
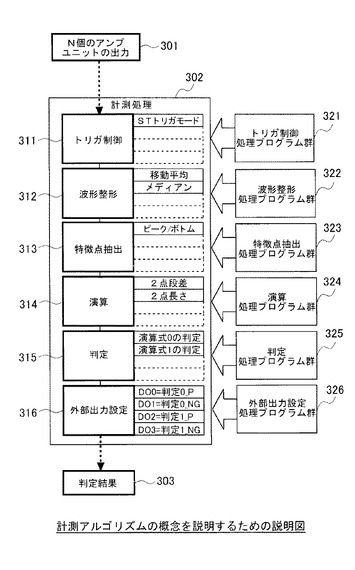
【図23】
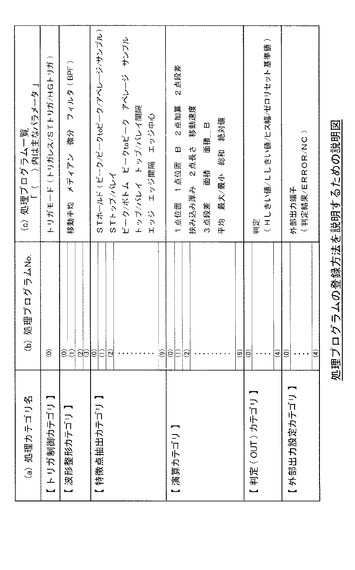
【図24】
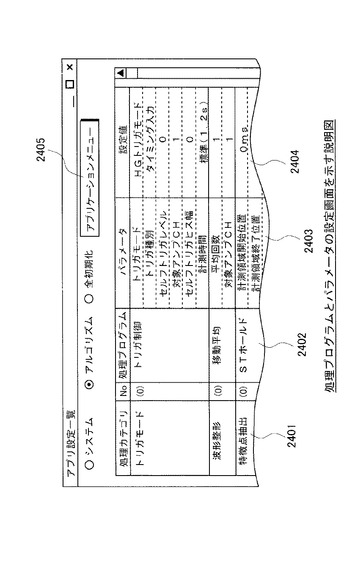
【図25】
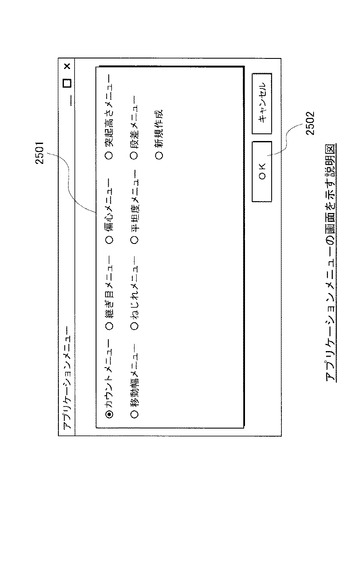
【図26】
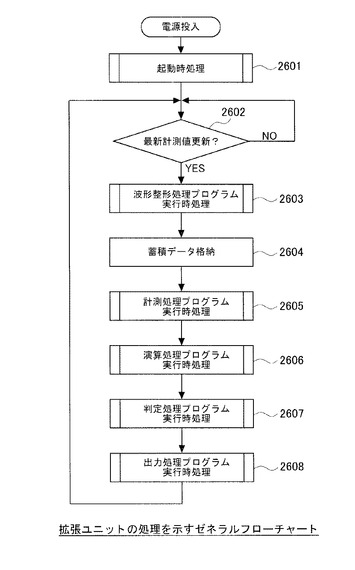
【図27】
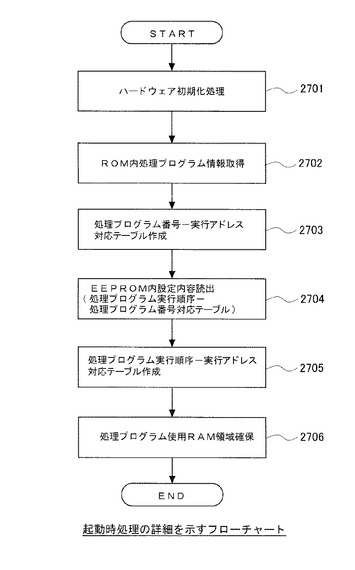
【図28】
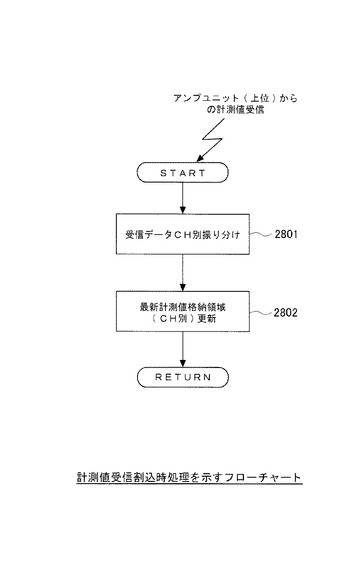
【図29】
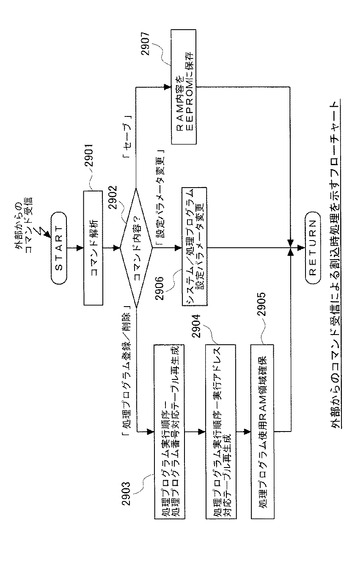
【図30】
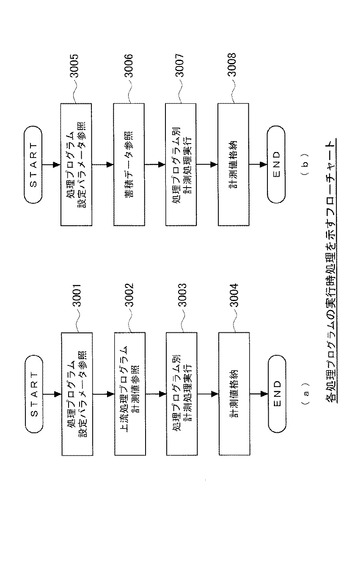
【図31】
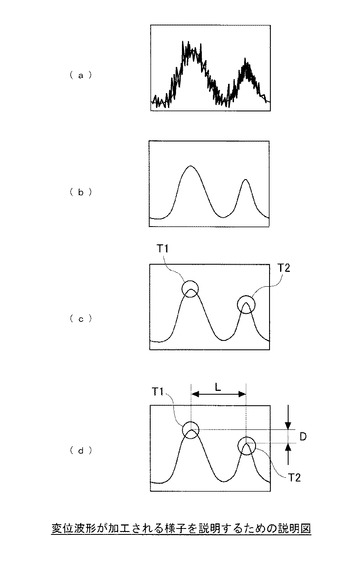
【図32】
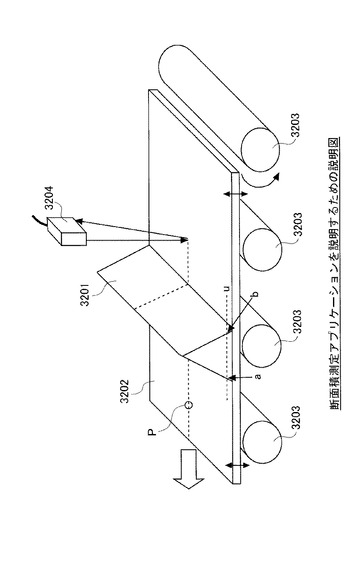
【図33】
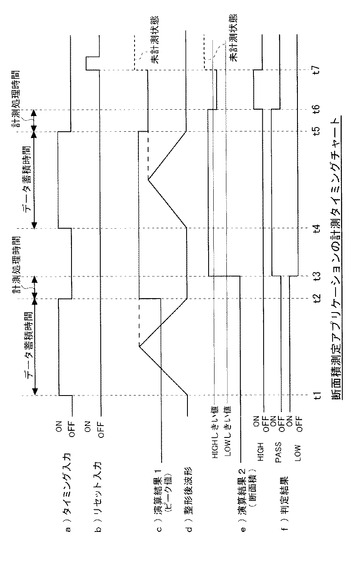
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【公開番号】特開2012−93360(P2012−93360A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2011−245505(P2011−245505)
【出願日】平成23年11月9日(2011.11.9)
【分割の表示】特願2004−241902(P2004−241902)の分割
【原出願日】平成16年8月23日(2004.8.23)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【分割の表示】特願2004−241902(P2004−241902)の分割
【原出願日】平成16年8月23日(2004.8.23)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]