
変位検出装置
【課題】磁性体の変位の検出精度を向上させることができる変位検出装置を提供すること。
【解決手段】変位検出装置1は、磁性体4、磁石6、磁気センサ7、およびヨーク9を備え、磁気センサ7の出力値に基づいて、磁性体4の変位を検出する。磁性体4は、磁石6および磁気センサ7の上方の位置と、少なくとも磁気センサ7の上方から外れた位置との間を変位する。磁石6および磁気センサ7の上下にある磁性体4とヨーク9により、磁石6の発生する磁束が集中して、磁気センサ7に誘導される。
【解決手段】変位検出装置1は、磁性体4、磁石6、磁気センサ7、およびヨーク9を備え、磁気センサ7の出力値に基づいて、磁性体4の変位を検出する。磁性体4は、磁石6および磁気センサ7の上方の位置と、少なくとも磁気センサ7の上方から外れた位置との間を変位する。磁石6および磁気センサ7の上下にある磁性体4とヨーク9により、磁石6の発生する磁束が集中して、磁気センサ7に誘導される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁石と磁気センサにより、検出対象物である磁性体の変位を検出する変位検出装置に関する。
【背景技術】
【0002】
磁性体と磁石と磁気センサとを備えた変位検出装置として、たとえば、特許文献1および特許文献2に開示された装置がある。これらは、磁性体の変位により、磁石が発生する磁束を変化させ、該磁束を検出する磁気センサの出力値に基づいて、磁性体の変位を検出する。
【0003】
詳しくは、特許文献1では、ケース上に凹型の磁石を設け、磁石のN極からS極へ到達する磁束上に磁気センサ(MRセンサ)を設けている。そして、磁性体を磁気センサの磁石と反対側から、磁気センサおよび磁石に対して近づけたり離したりする。磁性体が磁気センサおよび磁石に対して離れた位置にあるとき、磁石の磁束は磁気センサの長手方向へ通る。また、磁性体が磁気センサおよび磁石に対して接近した位置にあるとき、磁石の磁束は磁気センサの短手方向へ通る。このような磁石の磁束の方向の変化により、磁気センサによる磁束の検出量および出力値が変化する。
【0004】
特許文献2(特に、図1および図2参照)では、凹型のヨークの一方の内側面に磁石を設け、他方の内側面に磁気センサ(磁気検出素子)を設けている。また、回転円板の外周縁に磁性体を設け、該磁性体の半径または厚みを漸次減少させている。そして、ヨークの内側の磁石と磁気センサとの間に、磁性体を通過させて、磁石から磁気センサに到達する磁束を誘導する。これにより、磁石から磁気センサに到達する磁束量が変化して、磁気センサの出力値も変化する。
【0005】
しかしながら、このような構造では、磁石、磁気センサ、および磁性体などの部品の寸法や組み付けの精度により、磁気センサによる磁束の検出量がばらついてしまう。そのため、磁気センサによる磁束の検出量が少なくなったり、磁性体が変位したときの磁気センサによる磁束の検出量の変化が小さくなったりして、磁性体の変位の検出精度が悪くなるおそれがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−21524号公報
【特許文献2】再表97/14608号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の課題は、磁性体の変位の検出精度を向上させることができる変位検出装置を提供することである。
【課題を解決するための手段】
【0008】
本発明は、磁性体と磁石と磁気センサとを備え、磁気センサの出力値に基づいて、磁性体の変位を検出する変位検出装置において、磁石および磁気センサの下方にヨークを設け、磁性体は、磁石および磁気センサの上方の位置と、少なくとも磁気センサの上方から外れた位置との間を変位する。
【0009】
上記によると、磁石および磁気センサの上下にある磁性体とヨークにより、磁石の発生する磁束が集中して、磁気センサに誘導されるので、磁気センサによる磁束の検出量を多くすることができる。また、磁性体が磁石および磁気センサの上方の位置と、少なくとも磁気センサの上方から外れた位置との間を変位するので、磁束の通る場所の変化が大きくなり、磁気センサによる磁束の検出量の変化を大きくすることができる。
【0010】
よって、部品の寸法や組み付けの精度により、磁気センサによる磁束の検出量がばらついても、該磁束の検出量と該検出量の変化とを増大させて、磁気センサの出力値に基づいた、磁性体の変位の検出精度を向上させることができる。
【0011】
また、本発明では、上記の変位検出装置において、磁性体が常に磁石の上方の位置にあるようにしてもよい。
【0012】
また、本発明では、上記の変位検出装置において、磁石と磁気センサとを上下方向に対して側方に並べるようにしてもよい。
【0013】
また、本発明では、上記の変位検出装置において、磁性体が磁石と磁気センサの並ぶ方向と平行に変位するようにしてもよい。
【0014】
また、本発明では、上記の変位検出装置において、磁性体は回転することにより変位し、磁石を磁気センサより磁性体の回転中心の近くに設けるようにしてもよい。
【0015】
さらに、本発明では、上記の変位検出装置において、磁石と磁気センサとを同一の基板の表面に設け、該基板の裏面にヨークを設け、該基板の表面側に磁性体を設けるようにしてもよい。
【発明の効果】
【0016】
本発明によれば、磁気センサによる磁束の検出量とこの変化を増大させて、磁性体の変位の検出精度を向上させることができる、変位検出装置を提供することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態による変位検出装置の適用例を示した図である。
【図2】図1の適用例の動作を示した図である。
【図3】図1の変位検出装置の要部の側面図である。
【図4】図1の変位検出装置の要部の上面図である。
【図5】図1の変位検出装置の要部の下面図である。
【図6】他の実施形態による変位検出装置の要部の側面図である。
【図7】図6の変位検出装置の要部の上面図である。
【図8】他の実施形態による変位検出装置の要部の上面図である。
【図9】図8のX矢視図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態につき、図面を参照しながら説明する。各図において、同一の部分または対応する部分には、同一符号を付してある。
【0019】
まず、本発明の一実施形態による変位検出装置1の適用例を、図1および図2を参照しながら説明する。
【0020】
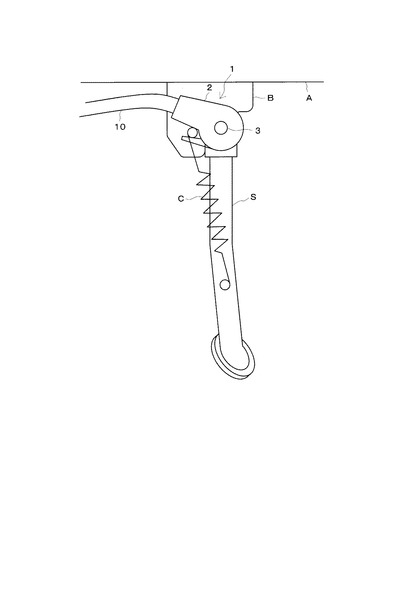
変位検出装置1は、たとえば、自動二輪車の車体AにブラケットBとねじ(図示省略)などを介して取り付けられる。変位検出装置1は、たとえば、サイドスタンドSの位置を検出するために使用される。
【0021】
サイドスタンドSは、回転軸3と固定されている。回転軸3は、変位検出装置1に形成された貫通孔(図示省略)と、ブラケットBに形成された貫通孔(図示省略)とを通って、ブラケットBに保持されている。
【0022】
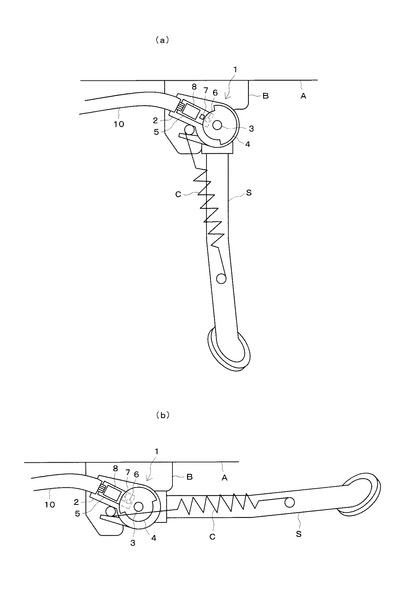
サイドスタンドSは、図2に示すように、回転軸3を中心にして、車体AやブラケットBに対して回動する。サイドスタンドSの側面とブラケットBの側面とが当接することにより、サイドスタンドSの回動範囲は、図2(a)に示す起立位置と、図2(b)に示す収納位置との間に制限される。つまり、サイドスタンドSは、起立位置と収納位置との間を変位する。
【0023】
回転軸3は、サイドスタンドSに伴って回転する。コイルばねCは、サイドスタンドSを引っ張って、起立位置または収納位置に保持する。サイドスタンドSの回動は、自動二輪車の利用者の足による操作で行われる。
【0024】
変位検出装置1のケース2は、ブラケットBにねじで固定されている。図2では、変位検出装置1のケース2内の構造を示している。ケース2内には、磁性体4、基板5、磁石6、および磁気センサ7などが収納されている。
【0025】
磁性体4は、回転軸3と固定されている。基板5は、ケース2内に固定されている。基板5には、検出回路8やハーネス10の端子などが実装されている。磁気センサ7は、たとえば、ホールICなどから構成されている。
【0026】
次に、変位検出装置1の要部を、図3〜図5を参照しながら説明する。
【0027】
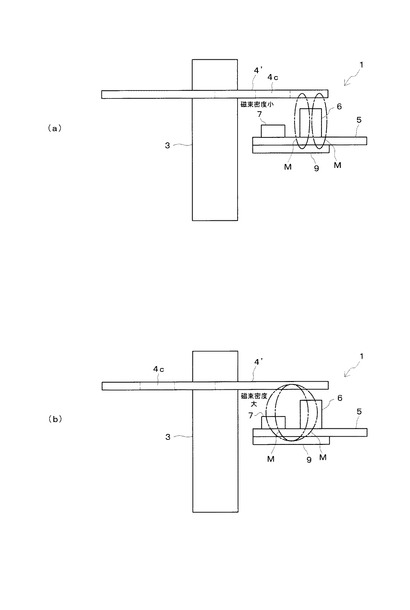
磁石6と磁気センサ7は、同一の基板5の表面に実装されている。磁石6と磁気センサ7は、図3で上下方向に対して側方でかつ基板5の長手方向に並べて設けられている。
【0028】
図3で、下方(ヨーク9側)は、基板5の裏面側であり、自動二輪車の車体A側(ブラケットB側)に相当する。上方は、基板5の表面側であり、車体Aと反対側に相当する。
【0029】
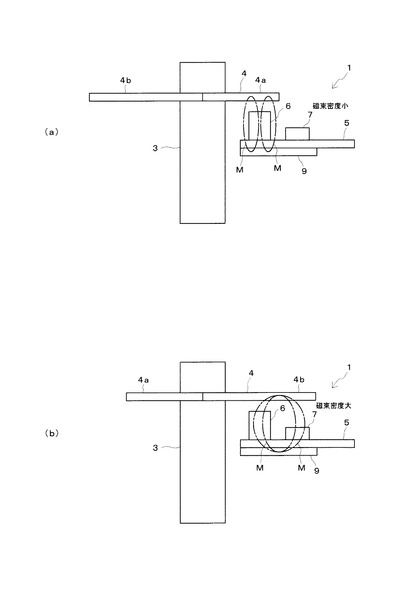
磁石6および磁気センサ7の下方には、ヨーク9が設けられている。ヨーク9は、薄板状の磁性体から構成されている。ヨーク9は、基板5の裏面に固定されている。図4および図5に示すように、ヨーク9の上下方向(紙面と垂直な方向)の投影面積内に、磁石6および磁気センサ7は配置されている。
【0030】
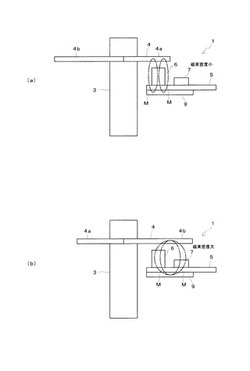
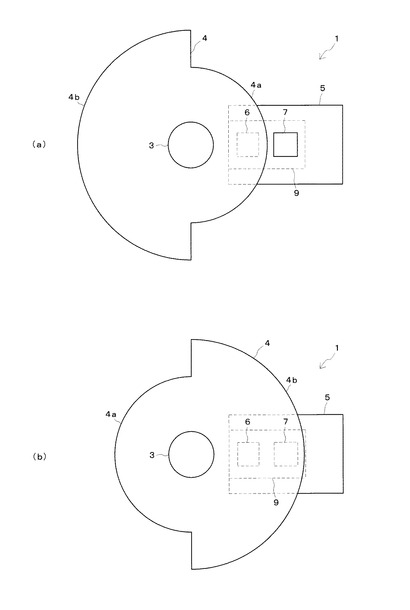
磁性体4は、薄円板状に形成されている。磁性体4には、小径部分4aと大径部分4bとが設けられている。磁性体4は、基板5の表面側で、回転軸3に固定されている。図3に示すように、磁性体4は、基板5に対して、磁石6および磁気センサ7より上方に設けられている。磁性体4と基板5とは、平行になっている。
【0031】
磁性体4は、サイドスタンドSおよび回転軸3に伴って回転する。磁石6は、磁気センサ7より磁性体4の回転中心(回転軸3)の近くに設けられている。
【0032】
図2(a)に示すように、サイドスタンドSが起立位置にあるときは、図2〜図5の各(a)に示すように、磁性体4の小径部分4aが磁石6の上方に位置し、磁気センサ7の上方には、磁性体4が位置しない。
【0033】
また、図2(b)に示すように、サイドスタンドSが収納位置にあるときは、図2〜図5の各(b)に示すように、磁性体4の大径部分4bが磁石6および磁気センサ7の上方に位置する。
【0034】
磁性体4は、サイドスタンドSおよび回転軸3に伴って回転することにより、磁石6および磁気センサ7の上方の位置(図2〜図5の各(b)参照)と、磁気センサ7の上方から外れた位置(図2〜図5の各(a)参照)との間を変位する。
【0035】
磁性体4の変位方向は、磁石6と磁気センサ7の並ぶ方向と平行になっている。また、磁性体4は、常に磁石6の上方の位置にある。磁石6は、常に磁性体4とヨーク9の間にあって、磁性体4とヨーク9を磁化している。
【0036】
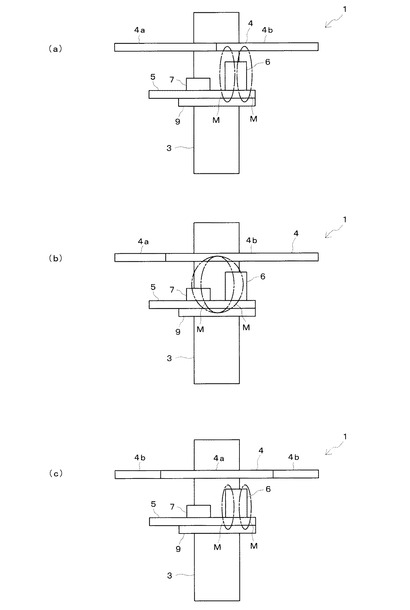
図2〜図5の各(a)に示すように、磁性体4が、磁石6の上方に位置して、磁気センサ7の上方から外れているときは、磁石6の発生する磁束が、磁性体4とヨーク9により、磁石6の付近に誘導される。そして、図3(a)に示すように、磁力線Mが磁性体4とヨーク9の間の磁石6の周囲に広がり、磁気センサ7の付近の磁束密度が小さくなる。このため、磁気センサ7による磁束の検出量が低レベルになり、磁気センサ7の出力値(電圧)も低レベルになる。
【0037】
また、図2〜図5の各(b)に示すように、磁性体4が、磁石6および磁気センサ7の上方に位置しているときは、磁石6の発生する磁束が、磁性体4とヨーク9により、磁気センサ7に誘導される。そして、図3(b)に示すように、磁力線Mが磁性体4とヨーク9の間の磁石6から磁気センサ7まで広がり、磁気センサ7の付近の磁束密度が大きくなる。このため、磁気センサ7による磁束の検出量が高レベルになり、磁気センサ7の出力値(電圧)も高レベルになる。
【0038】
磁性体4が回転しながら変位することにより、磁束の通る場所および磁気の流れが、上記のように変化する。そして、この変化が磁気センサ7により検出される。
【0039】
図2に示した検出回路8では、磁気センサ7の出力値に基づいて、磁性体4の位置と変位の検出が行われる。たとえば、磁気センサ7の出力値が高レベルのときは、図2〜図5の各(b)に示すように、磁性体4が磁石6および磁気センサ7の上方の位置にあることを検出する。また、磁気センサ7の出力値が低レベルのときは、図2〜図5の各(a)に示すように、磁性体4が磁気センサ7の上方から外れた位置にあることを検出する。
【0040】
また、磁気センサ7の出力値が低レベルから高レベルに切り替わったときは、磁性体4が、磁気センサ7の上方から外れた位置より、磁石6および磁気センサ7の上方の位置に変位したことを検出する。また、磁気センサ7の出力値が高レベルから低レベルに切り替わったときは、磁性体4が、磁石6および磁気センサ7の上方の位置より、磁気センサ7の上方から外れた位置に変位したことを検出する。
【0041】
さらに、検出回路8では、磁気センサ7の出力値に基づいて、サイドスタンドSの位置の検出も行われる。たとえば、磁気センサ7の出力値が高レベルのときは、図2(b)に示すように、サイドスタンドSが収納位置にあることを検出する。また、磁気センサ7の出力値が低レベルのときは、図2(a)に示すように、サイドスタンドSが起立位置にあることを検出する。
【0042】
つまり、変位検出装置1の検出対象物は、磁性体4とサイドスタンドSである。上記のような検出結果は、検出回路8からハーネス10を介して、自動二輪車の制御装置(図示省略)へ送信される。
【0043】
上記実施形態によると、磁石6および磁気センサ7の上下にある磁性体4とヨーク9により、磁石6の発生する磁束が集中して、磁気センサ7に誘導されるので、磁気センサ7による磁束の検出量を多くすることができる。
【0044】
また、磁性体4が磁石6および磁気センサ7の上方の位置と、磁気センサ7の上方から外れた位置との間を変位するので、磁束の通る場所の変化が大きくなり、磁気センサ7による磁束の検出量の変化と、磁気センサ7の出力値の変化を大きくすることができる。
【0045】
よって、部品の寸法や組み付けの精度により、磁気センサ7による磁束の検出量がばらついても、該磁束の検出量と該検出量の変化とを増大させて、磁気センサ7の出力値に基づいた、磁性体4の変位の検出精度を向上させることができる。
【0046】
また、上記実施形態では、磁性体4が常に磁石6の上方の位置にある。このため、磁性体4を常に磁化して、磁性体4の磁気ヒステリシスを無視し、磁気センサ7による磁束の検出量のばらつきを抑制して、磁性体4の変位の検出精度を向上させることができる。また、磁性体4とヨーク9の間に磁石6の磁束を集中させて、磁気センサ7による磁束の検出量をより多くすることができる。
【0047】
また、上記実施形態では、磁石6と磁気センサ7とを上下方向に対して側方に並べている。このため、磁石6と磁気センサ7との間隔が小さくなり、磁気センサ7による磁束の検出量をより多くし、該検出量のばらつきを抑制することができる。
【0048】
また、上記実施形態では、磁性体4が磁石6と磁気センサ7の並ぶ方向と平行に変位する。このため、磁性体4と磁石6との間隔が常に一定になり、また、磁性体4が磁気センサ7の上方に位置したときに、磁性体4と磁気センサ7との間隔も一定になり、磁束および磁束の検出量のばらつきを抑制することができる。
【0049】
また、上記実施形態では、磁石6を磁気センサ7より磁性体4の回転中心の近くに設けるようにしている。このため、磁性体4を磁石6および磁気センサ7の上方の位置と、磁気センサ7の上方から外れた位置との間を変位させるための、磁性体4の形状を単純にしつつ、磁性体4の変位量を大きく取ることができる。
【0050】
さらに、上記実施形態では、同一の基板5の表面に磁石6と磁気センサ7とを設け、裏面にヨーク9を設けている。このため、磁石6と磁気センサ7とヨーク9の間隔のばらつきを抑制して、組み付け精度を向上させることができる。またこれにより、磁気センサ7による磁束の検出量のばらつきを抑制して、磁性体4の変位の検出精度を向上させることができる。
【0051】
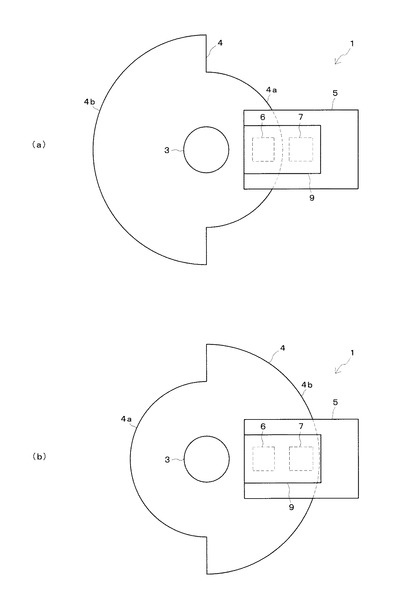
本発明は、上述した以外にも種々の実施形態を採用することができる。たとえば、上記実施形態では、磁石6を磁気センサ7より回転軸3の近くに設けた例を挙げたが、本発明はこれに限るものではない。これ以外に、たとえば、図6および図7に示すように、磁気センサ7を磁石6より回転軸3の近くに設けるようにしてもよい。
【0052】
この場合、図7に示すように、磁性体4’における、磁気センサ7の直上の位置に円弧状の貫通孔4cを形成すればよい。磁性体4’が回転軸3を中心にして回転することで、貫通孔4cも回転する。これにより、磁性体4’が、図6および図7の各(b)に示すような、磁石6および磁気センサ7の上方の位置と、図6および図7の各(a)に示すような、少なくとも磁気センサ7の上方から外れた位置との間を変位するようになる。
【0053】
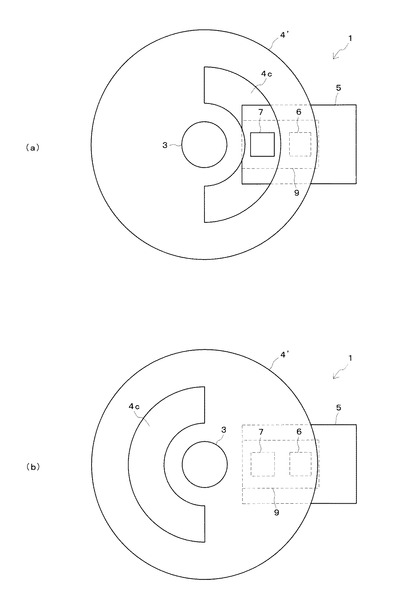
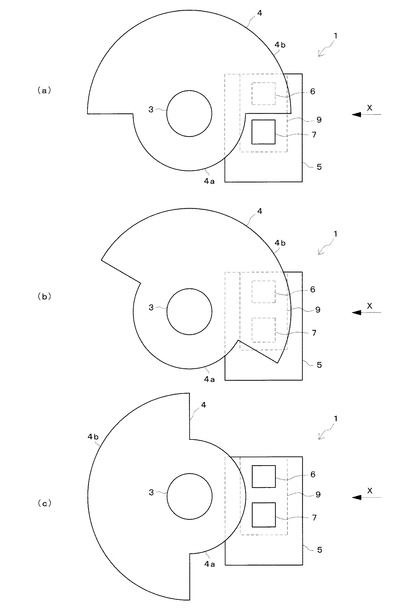
また、たとえば、図8および図9に示すように、磁石6と磁気センサ7を回転軸3から同一距離の位置に設けるようにしてもよい。磁性体4は、回転軸3を中心にして回転することにより、図8および図9の各(b)に示すような、磁石6および磁気センサ7の上方の位置と、図8および図9の各(a)に示すような、少なくとも磁気センサ7の上方から外れた位置と、図8および図9の各(c)に示すような、磁石6および磁気センサ7の上方から外れた位置との間を、それぞれ変位することができる。
【0054】
この場合、図8および図9の各(b)に示す状態、図8および図9の各(a)に示す状態、および図8および図9の各(c)に示す状態の順で、磁気センサ7の付近の磁束密度が大きくなる。つまり、磁気センサ7による磁束の検出量は、図8および図9の各(b)に示すように、磁性体4が磁石6および磁気センサ7の上方の位置にあるときに最も多くなり、図8および図9の各(c)に示すように、磁性体4が磁石6および磁気センサ7の上方から外れた位置にあるときに最も少なくなる。
【0055】
また、上記実施形態では、磁石6と磁気センサ7とを基板5の表面に設け、ヨーク9を基板5の裏面に設けた例を挙げたが、本発明はこれに限るものではない。これ以外に、たとえば、磁石6と磁気センサ7のうち、一方を基板5の表面に設け、他方を裏面に設けるようにしてもよい。また、ヨーク9を基板5以外に取り付けるようにしてもよい。また、磁石6を基板5に取り付けず、たとえば、ヨーク9に取り付けるようにしてもよい。
【0056】
また、上記実施形態では、磁気センサ7の一例としてホールICを示したが、本発明はこれに限るものではない。これ以外に、たとえば、磁気抵抗素子やリードスイッチなどのその他の磁気センサを用いてもよい。
【0057】
また、上記実施形態では、検出回路8において、磁気センサ7の出力値に基づき、磁性体4の位置および変位、ならびにサイドスタンドSの位置を判断するようにした例を挙げたが、本発明はこれに限るものではない。これ以外に、たとえば、磁気センサ7の出力値を検出回路8から自動二輪車の他の制御装置へ送信し、該他の制御装置において、磁性体4の位置および変位、ならびにサイドスタンドSの位置を判断するようにしてもよい。つまり、磁性体4やサイドスタンドSの位置や変位を判断するためのデータを変位検出装置1で検出し、その判断部は変位検出装置1の外部に設けられていてもよい。
【0058】
また、上記実施形態では、磁性体4が回転することにより変位した例を挙げたが、本発明はこれに限るものではない。これ以外に、磁性体が直線的に変位する場合にも、本発明は適用することができる。
【0059】
さらに、上記実施形態では、自動二輪車のサイドスタンドSの位置を検出するための変位検出装置1に、本発明を適用した例を挙げたが、これ以外の検出対象物の変位を検出するための検出装置に対しても、本発明を適用することは可能である。
【符号の説明】
【0060】
1 変位検出装置
3 回転軸
4、4’ 磁性体
5 基板
6 磁石
7 磁気センサ
9 ヨーク
【技術分野】
【0001】
本発明は、磁石と磁気センサにより、検出対象物である磁性体の変位を検出する変位検出装置に関する。
【背景技術】
【0002】
磁性体と磁石と磁気センサとを備えた変位検出装置として、たとえば、特許文献1および特許文献2に開示された装置がある。これらは、磁性体の変位により、磁石が発生する磁束を変化させ、該磁束を検出する磁気センサの出力値に基づいて、磁性体の変位を検出する。
【0003】
詳しくは、特許文献1では、ケース上に凹型の磁石を設け、磁石のN極からS極へ到達する磁束上に磁気センサ(MRセンサ)を設けている。そして、磁性体を磁気センサの磁石と反対側から、磁気センサおよび磁石に対して近づけたり離したりする。磁性体が磁気センサおよび磁石に対して離れた位置にあるとき、磁石の磁束は磁気センサの長手方向へ通る。また、磁性体が磁気センサおよび磁石に対して接近した位置にあるとき、磁石の磁束は磁気センサの短手方向へ通る。このような磁石の磁束の方向の変化により、磁気センサによる磁束の検出量および出力値が変化する。
【0004】
特許文献2(特に、図1および図2参照)では、凹型のヨークの一方の内側面に磁石を設け、他方の内側面に磁気センサ(磁気検出素子)を設けている。また、回転円板の外周縁に磁性体を設け、該磁性体の半径または厚みを漸次減少させている。そして、ヨークの内側の磁石と磁気センサとの間に、磁性体を通過させて、磁石から磁気センサに到達する磁束を誘導する。これにより、磁石から磁気センサに到達する磁束量が変化して、磁気センサの出力値も変化する。
【0005】
しかしながら、このような構造では、磁石、磁気センサ、および磁性体などの部品の寸法や組み付けの精度により、磁気センサによる磁束の検出量がばらついてしまう。そのため、磁気センサによる磁束の検出量が少なくなったり、磁性体が変位したときの磁気センサによる磁束の検出量の変化が小さくなったりして、磁性体の変位の検出精度が悪くなるおそれがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−21524号公報
【特許文献2】再表97/14608号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の課題は、磁性体の変位の検出精度を向上させることができる変位検出装置を提供することである。
【課題を解決するための手段】
【0008】
本発明は、磁性体と磁石と磁気センサとを備え、磁気センサの出力値に基づいて、磁性体の変位を検出する変位検出装置において、磁石および磁気センサの下方にヨークを設け、磁性体は、磁石および磁気センサの上方の位置と、少なくとも磁気センサの上方から外れた位置との間を変位する。
【0009】
上記によると、磁石および磁気センサの上下にある磁性体とヨークにより、磁石の発生する磁束が集中して、磁気センサに誘導されるので、磁気センサによる磁束の検出量を多くすることができる。また、磁性体が磁石および磁気センサの上方の位置と、少なくとも磁気センサの上方から外れた位置との間を変位するので、磁束の通る場所の変化が大きくなり、磁気センサによる磁束の検出量の変化を大きくすることができる。
【0010】
よって、部品の寸法や組み付けの精度により、磁気センサによる磁束の検出量がばらついても、該磁束の検出量と該検出量の変化とを増大させて、磁気センサの出力値に基づいた、磁性体の変位の検出精度を向上させることができる。
【0011】
また、本発明では、上記の変位検出装置において、磁性体が常に磁石の上方の位置にあるようにしてもよい。
【0012】
また、本発明では、上記の変位検出装置において、磁石と磁気センサとを上下方向に対して側方に並べるようにしてもよい。
【0013】
また、本発明では、上記の変位検出装置において、磁性体が磁石と磁気センサの並ぶ方向と平行に変位するようにしてもよい。
【0014】
また、本発明では、上記の変位検出装置において、磁性体は回転することにより変位し、磁石を磁気センサより磁性体の回転中心の近くに設けるようにしてもよい。
【0015】
さらに、本発明では、上記の変位検出装置において、磁石と磁気センサとを同一の基板の表面に設け、該基板の裏面にヨークを設け、該基板の表面側に磁性体を設けるようにしてもよい。
【発明の効果】
【0016】
本発明によれば、磁気センサによる磁束の検出量とこの変化を増大させて、磁性体の変位の検出精度を向上させることができる、変位検出装置を提供することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態による変位検出装置の適用例を示した図である。
【図2】図1の適用例の動作を示した図である。
【図3】図1の変位検出装置の要部の側面図である。
【図4】図1の変位検出装置の要部の上面図である。
【図5】図1の変位検出装置の要部の下面図である。
【図6】他の実施形態による変位検出装置の要部の側面図である。
【図7】図6の変位検出装置の要部の上面図である。
【図8】他の実施形態による変位検出装置の要部の上面図である。
【図9】図8のX矢視図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態につき、図面を参照しながら説明する。各図において、同一の部分または対応する部分には、同一符号を付してある。
【0019】
まず、本発明の一実施形態による変位検出装置1の適用例を、図1および図2を参照しながら説明する。
【0020】
変位検出装置1は、たとえば、自動二輪車の車体AにブラケットBとねじ(図示省略)などを介して取り付けられる。変位検出装置1は、たとえば、サイドスタンドSの位置を検出するために使用される。
【0021】
サイドスタンドSは、回転軸3と固定されている。回転軸3は、変位検出装置1に形成された貫通孔(図示省略)と、ブラケットBに形成された貫通孔(図示省略)とを通って、ブラケットBに保持されている。
【0022】
サイドスタンドSは、図2に示すように、回転軸3を中心にして、車体AやブラケットBに対して回動する。サイドスタンドSの側面とブラケットBの側面とが当接することにより、サイドスタンドSの回動範囲は、図2(a)に示す起立位置と、図2(b)に示す収納位置との間に制限される。つまり、サイドスタンドSは、起立位置と収納位置との間を変位する。
【0023】
回転軸3は、サイドスタンドSに伴って回転する。コイルばねCは、サイドスタンドSを引っ張って、起立位置または収納位置に保持する。サイドスタンドSの回動は、自動二輪車の利用者の足による操作で行われる。
【0024】
変位検出装置1のケース2は、ブラケットBにねじで固定されている。図2では、変位検出装置1のケース2内の構造を示している。ケース2内には、磁性体4、基板5、磁石6、および磁気センサ7などが収納されている。
【0025】
磁性体4は、回転軸3と固定されている。基板5は、ケース2内に固定されている。基板5には、検出回路8やハーネス10の端子などが実装されている。磁気センサ7は、たとえば、ホールICなどから構成されている。
【0026】
次に、変位検出装置1の要部を、図3〜図5を参照しながら説明する。
【0027】
磁石6と磁気センサ7は、同一の基板5の表面に実装されている。磁石6と磁気センサ7は、図3で上下方向に対して側方でかつ基板5の長手方向に並べて設けられている。
【0028】
図3で、下方(ヨーク9側)は、基板5の裏面側であり、自動二輪車の車体A側(ブラケットB側)に相当する。上方は、基板5の表面側であり、車体Aと反対側に相当する。
【0029】
磁石6および磁気センサ7の下方には、ヨーク9が設けられている。ヨーク9は、薄板状の磁性体から構成されている。ヨーク9は、基板5の裏面に固定されている。図4および図5に示すように、ヨーク9の上下方向(紙面と垂直な方向)の投影面積内に、磁石6および磁気センサ7は配置されている。
【0030】
磁性体4は、薄円板状に形成されている。磁性体4には、小径部分4aと大径部分4bとが設けられている。磁性体4は、基板5の表面側で、回転軸3に固定されている。図3に示すように、磁性体4は、基板5に対して、磁石6および磁気センサ7より上方に設けられている。磁性体4と基板5とは、平行になっている。
【0031】
磁性体4は、サイドスタンドSおよび回転軸3に伴って回転する。磁石6は、磁気センサ7より磁性体4の回転中心(回転軸3)の近くに設けられている。
【0032】
図2(a)に示すように、サイドスタンドSが起立位置にあるときは、図2〜図5の各(a)に示すように、磁性体4の小径部分4aが磁石6の上方に位置し、磁気センサ7の上方には、磁性体4が位置しない。
【0033】
また、図2(b)に示すように、サイドスタンドSが収納位置にあるときは、図2〜図5の各(b)に示すように、磁性体4の大径部分4bが磁石6および磁気センサ7の上方に位置する。
【0034】
磁性体4は、サイドスタンドSおよび回転軸3に伴って回転することにより、磁石6および磁気センサ7の上方の位置(図2〜図5の各(b)参照)と、磁気センサ7の上方から外れた位置(図2〜図5の各(a)参照)との間を変位する。
【0035】
磁性体4の変位方向は、磁石6と磁気センサ7の並ぶ方向と平行になっている。また、磁性体4は、常に磁石6の上方の位置にある。磁石6は、常に磁性体4とヨーク9の間にあって、磁性体4とヨーク9を磁化している。
【0036】
図2〜図5の各(a)に示すように、磁性体4が、磁石6の上方に位置して、磁気センサ7の上方から外れているときは、磁石6の発生する磁束が、磁性体4とヨーク9により、磁石6の付近に誘導される。そして、図3(a)に示すように、磁力線Mが磁性体4とヨーク9の間の磁石6の周囲に広がり、磁気センサ7の付近の磁束密度が小さくなる。このため、磁気センサ7による磁束の検出量が低レベルになり、磁気センサ7の出力値(電圧)も低レベルになる。
【0037】
また、図2〜図5の各(b)に示すように、磁性体4が、磁石6および磁気センサ7の上方に位置しているときは、磁石6の発生する磁束が、磁性体4とヨーク9により、磁気センサ7に誘導される。そして、図3(b)に示すように、磁力線Mが磁性体4とヨーク9の間の磁石6から磁気センサ7まで広がり、磁気センサ7の付近の磁束密度が大きくなる。このため、磁気センサ7による磁束の検出量が高レベルになり、磁気センサ7の出力値(電圧)も高レベルになる。
【0038】
磁性体4が回転しながら変位することにより、磁束の通る場所および磁気の流れが、上記のように変化する。そして、この変化が磁気センサ7により検出される。
【0039】
図2に示した検出回路8では、磁気センサ7の出力値に基づいて、磁性体4の位置と変位の検出が行われる。たとえば、磁気センサ7の出力値が高レベルのときは、図2〜図5の各(b)に示すように、磁性体4が磁石6および磁気センサ7の上方の位置にあることを検出する。また、磁気センサ7の出力値が低レベルのときは、図2〜図5の各(a)に示すように、磁性体4が磁気センサ7の上方から外れた位置にあることを検出する。
【0040】
また、磁気センサ7の出力値が低レベルから高レベルに切り替わったときは、磁性体4が、磁気センサ7の上方から外れた位置より、磁石6および磁気センサ7の上方の位置に変位したことを検出する。また、磁気センサ7の出力値が高レベルから低レベルに切り替わったときは、磁性体4が、磁石6および磁気センサ7の上方の位置より、磁気センサ7の上方から外れた位置に変位したことを検出する。
【0041】
さらに、検出回路8では、磁気センサ7の出力値に基づいて、サイドスタンドSの位置の検出も行われる。たとえば、磁気センサ7の出力値が高レベルのときは、図2(b)に示すように、サイドスタンドSが収納位置にあることを検出する。また、磁気センサ7の出力値が低レベルのときは、図2(a)に示すように、サイドスタンドSが起立位置にあることを検出する。
【0042】
つまり、変位検出装置1の検出対象物は、磁性体4とサイドスタンドSである。上記のような検出結果は、検出回路8からハーネス10を介して、自動二輪車の制御装置(図示省略)へ送信される。
【0043】
上記実施形態によると、磁石6および磁気センサ7の上下にある磁性体4とヨーク9により、磁石6の発生する磁束が集中して、磁気センサ7に誘導されるので、磁気センサ7による磁束の検出量を多くすることができる。
【0044】
また、磁性体4が磁石6および磁気センサ7の上方の位置と、磁気センサ7の上方から外れた位置との間を変位するので、磁束の通る場所の変化が大きくなり、磁気センサ7による磁束の検出量の変化と、磁気センサ7の出力値の変化を大きくすることができる。
【0045】
よって、部品の寸法や組み付けの精度により、磁気センサ7による磁束の検出量がばらついても、該磁束の検出量と該検出量の変化とを増大させて、磁気センサ7の出力値に基づいた、磁性体4の変位の検出精度を向上させることができる。
【0046】
また、上記実施形態では、磁性体4が常に磁石6の上方の位置にある。このため、磁性体4を常に磁化して、磁性体4の磁気ヒステリシスを無視し、磁気センサ7による磁束の検出量のばらつきを抑制して、磁性体4の変位の検出精度を向上させることができる。また、磁性体4とヨーク9の間に磁石6の磁束を集中させて、磁気センサ7による磁束の検出量をより多くすることができる。
【0047】
また、上記実施形態では、磁石6と磁気センサ7とを上下方向に対して側方に並べている。このため、磁石6と磁気センサ7との間隔が小さくなり、磁気センサ7による磁束の検出量をより多くし、該検出量のばらつきを抑制することができる。
【0048】
また、上記実施形態では、磁性体4が磁石6と磁気センサ7の並ぶ方向と平行に変位する。このため、磁性体4と磁石6との間隔が常に一定になり、また、磁性体4が磁気センサ7の上方に位置したときに、磁性体4と磁気センサ7との間隔も一定になり、磁束および磁束の検出量のばらつきを抑制することができる。
【0049】
また、上記実施形態では、磁石6を磁気センサ7より磁性体4の回転中心の近くに設けるようにしている。このため、磁性体4を磁石6および磁気センサ7の上方の位置と、磁気センサ7の上方から外れた位置との間を変位させるための、磁性体4の形状を単純にしつつ、磁性体4の変位量を大きく取ることができる。
【0050】
さらに、上記実施形態では、同一の基板5の表面に磁石6と磁気センサ7とを設け、裏面にヨーク9を設けている。このため、磁石6と磁気センサ7とヨーク9の間隔のばらつきを抑制して、組み付け精度を向上させることができる。またこれにより、磁気センサ7による磁束の検出量のばらつきを抑制して、磁性体4の変位の検出精度を向上させることができる。
【0051】
本発明は、上述した以外にも種々の実施形態を採用することができる。たとえば、上記実施形態では、磁石6を磁気センサ7より回転軸3の近くに設けた例を挙げたが、本発明はこれに限るものではない。これ以外に、たとえば、図6および図7に示すように、磁気センサ7を磁石6より回転軸3の近くに設けるようにしてもよい。
【0052】
この場合、図7に示すように、磁性体4’における、磁気センサ7の直上の位置に円弧状の貫通孔4cを形成すればよい。磁性体4’が回転軸3を中心にして回転することで、貫通孔4cも回転する。これにより、磁性体4’が、図6および図7の各(b)に示すような、磁石6および磁気センサ7の上方の位置と、図6および図7の各(a)に示すような、少なくとも磁気センサ7の上方から外れた位置との間を変位するようになる。
【0053】
また、たとえば、図8および図9に示すように、磁石6と磁気センサ7を回転軸3から同一距離の位置に設けるようにしてもよい。磁性体4は、回転軸3を中心にして回転することにより、図8および図9の各(b)に示すような、磁石6および磁気センサ7の上方の位置と、図8および図9の各(a)に示すような、少なくとも磁気センサ7の上方から外れた位置と、図8および図9の各(c)に示すような、磁石6および磁気センサ7の上方から外れた位置との間を、それぞれ変位することができる。
【0054】
この場合、図8および図9の各(b)に示す状態、図8および図9の各(a)に示す状態、および図8および図9の各(c)に示す状態の順で、磁気センサ7の付近の磁束密度が大きくなる。つまり、磁気センサ7による磁束の検出量は、図8および図9の各(b)に示すように、磁性体4が磁石6および磁気センサ7の上方の位置にあるときに最も多くなり、図8および図9の各(c)に示すように、磁性体4が磁石6および磁気センサ7の上方から外れた位置にあるときに最も少なくなる。
【0055】
また、上記実施形態では、磁石6と磁気センサ7とを基板5の表面に設け、ヨーク9を基板5の裏面に設けた例を挙げたが、本発明はこれに限るものではない。これ以外に、たとえば、磁石6と磁気センサ7のうち、一方を基板5の表面に設け、他方を裏面に設けるようにしてもよい。また、ヨーク9を基板5以外に取り付けるようにしてもよい。また、磁石6を基板5に取り付けず、たとえば、ヨーク9に取り付けるようにしてもよい。
【0056】
また、上記実施形態では、磁気センサ7の一例としてホールICを示したが、本発明はこれに限るものではない。これ以外に、たとえば、磁気抵抗素子やリードスイッチなどのその他の磁気センサを用いてもよい。
【0057】
また、上記実施形態では、検出回路8において、磁気センサ7の出力値に基づき、磁性体4の位置および変位、ならびにサイドスタンドSの位置を判断するようにした例を挙げたが、本発明はこれに限るものではない。これ以外に、たとえば、磁気センサ7の出力値を検出回路8から自動二輪車の他の制御装置へ送信し、該他の制御装置において、磁性体4の位置および変位、ならびにサイドスタンドSの位置を判断するようにしてもよい。つまり、磁性体4やサイドスタンドSの位置や変位を判断するためのデータを変位検出装置1で検出し、その判断部は変位検出装置1の外部に設けられていてもよい。
【0058】
また、上記実施形態では、磁性体4が回転することにより変位した例を挙げたが、本発明はこれに限るものではない。これ以外に、磁性体が直線的に変位する場合にも、本発明は適用することができる。
【0059】
さらに、上記実施形態では、自動二輪車のサイドスタンドSの位置を検出するための変位検出装置1に、本発明を適用した例を挙げたが、これ以外の検出対象物の変位を検出するための検出装置に対しても、本発明を適用することは可能である。
【符号の説明】
【0060】
1 変位検出装置
3 回転軸
4、4’ 磁性体
5 基板
6 磁石
7 磁気センサ
9 ヨーク
【特許請求の範囲】
【請求項1】
磁性体と磁石と磁気センサとを備え、
磁気センサの出力値に基づいて、磁性体の変位を検出する変位検出装置において、
前記磁石および前記磁気センサの下方にヨークを設け、
前記磁性体は、前記磁石および前記磁気センサの上方の位置と、少なくとも前記磁気センサの上方から外れた位置との間を変位する、ことを特徴とする変位検出装置。
【請求項2】
請求項1に記載の変位検出装置において、
前記磁性体は常に前記磁石の上方の位置にある、ことを特徴とする変位検出装置。
【請求項3】
請求項1または請求項2に記載の変位検出装置において、
前記磁石と前記磁気センサとを上下方向に対して側方に並べた、ことを特徴とする変位検出装置。
【請求項4】
請求項3に記載の変位検出装置において、
前記磁性体は、前記磁石と前記磁気センサの並ぶ方向と平行に変位する、ことを特徴とする変位検出装置。
【請求項5】
請求項1ないし請求項4のいずれかに記載の変位検出装置において、
前記磁性体は回転することにより変位し、
前記磁石を前記磁気センサより前記磁性体の回転中心の近くに設けた、ことを特徴とする変位検出装置。
【請求項6】
請求項1ないし請求項5のいずれかに記載の変位検出装置において、
前記磁石と前記磁気センサとを同一の基板の表面に設け、
前記基板の裏面に前記ヨークを設け、
前記基板の表面側に前記磁性体を設けた、ことを特徴とする変位検出装置。
【請求項1】
磁性体と磁石と磁気センサとを備え、
磁気センサの出力値に基づいて、磁性体の変位を検出する変位検出装置において、
前記磁石および前記磁気センサの下方にヨークを設け、
前記磁性体は、前記磁石および前記磁気センサの上方の位置と、少なくとも前記磁気センサの上方から外れた位置との間を変位する、ことを特徴とする変位検出装置。
【請求項2】
請求項1に記載の変位検出装置において、
前記磁性体は常に前記磁石の上方の位置にある、ことを特徴とする変位検出装置。
【請求項3】
請求項1または請求項2に記載の変位検出装置において、
前記磁石と前記磁気センサとを上下方向に対して側方に並べた、ことを特徴とする変位検出装置。
【請求項4】
請求項3に記載の変位検出装置において、
前記磁性体は、前記磁石と前記磁気センサの並ぶ方向と平行に変位する、ことを特徴とする変位検出装置。
【請求項5】
請求項1ないし請求項4のいずれかに記載の変位検出装置において、
前記磁性体は回転することにより変位し、
前記磁石を前記磁気センサより前記磁性体の回転中心の近くに設けた、ことを特徴とする変位検出装置。
【請求項6】
請求項1ないし請求項5のいずれかに記載の変位検出装置において、
前記磁石と前記磁気センサとを同一の基板の表面に設け、
前記基板の裏面に前記ヨークを設け、
前記基板の表面側に前記磁性体を設けた、ことを特徴とする変位検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−108894(P2013−108894A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255141(P2011−255141)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(510123839)オムロンオートモーティブエレクトロニクス株式会社 (110)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(510123839)オムロンオートモーティブエレクトロニクス株式会社 (110)
【Fターム(参考)】
[ Back to top ]