
変位計測装置、変位計測方法、及び変位計測プログラム

【課題】地滑りのように広範囲で変位特徴点が多数となり得る変位計測において、作業効率及び精度の向上を図る。
【解決手段】観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成する(S42)。地滑り前後の地形データそれぞれから生成される起伏特徴画像についてパターンマッチングを行い、観測対象領域内に設定された変位追跡点の起伏特徴画像上での対応点を追跡する(S44)。起伏特徴画像上での対応点の位置、及び地形データの高さ情報に基づいて、変位追跡点の三次元座標を求める(S48)。各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める(S50)。
【解決手段】観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成する(S42)。地滑り前後の地形データそれぞれから生成される起伏特徴画像についてパターンマッチングを行い、観測対象領域内に設定された変位追跡点の起伏特徴画像上での対応点を追跡する(S44)。起伏特徴画像上での対応点の位置、及び地形データの高さ情報に基づいて、変位追跡点の三次元座標を求める(S48)。各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める(S50)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地表面の三次元的な変位を計測する変位計測装置、変位計測方法、及び変位計測プログラムに関する。
【背景技術】
【0002】
変位計測技術は、例えば、地滑りの解析・対策、土工事や土構造物の構築・管理等において重要である。
【0003】
変位計測技術にはいろいろな方式が提案されており、地滑り現象に関しては、例えば、測量を行いたい対象物上に予め反射板を設置し、光の照射及び反射光の観測により移動量を計測するものなどが知られている。また、航空・衛星写真測量技術を用いるものも知られている。航空・衛星写真測量技術を用いる方式は反射板等の設置が不要であるので、広い範囲や近寄りにくい場所の地滑り観測に好適である。従来、航空・衛星写真測量技術を利用して地滑り解析を行う場合、地滑り前後の空中・衛星写真や地形データを用いて、地滑りによる地形変化を把握している。
【0004】
当該地形変化の解析の従来の基本的な手法では、人間が目視により画像から変位追跡点を探し出し、画像間の変位特徴点の対応付けをマニュアル操作で行って、変位ベクトルを求める。
【0005】
地形データは、例えば航空レーザ計測により高精度に取得することができる。なお、レーザ計測は画像のような色彩情報、テクスチャ情報を取得することができず、レーザ計測データのみでは変位計測点を高精度に特定することが難しい。そのため、従来、色彩やテクスチャの情報が得られる空中写真と合わせて変位計測に用いられている。
【先行技術文献】
【特許文献】
【0006】
【非特許文献1】小岩弘道、福澤由美子、稲澤保行、「八幡平澄川地すべり計測及び解析−GISを利用した解析例−」、APA、財団法人日本測量調査技術協会、1999年12月、No.74、p.60−65
【発明の概要】
【発明が解決しようとする課題】
【0007】
地滑りのように広範囲で変位特徴点が多数となり得る解析は、人間の作業への負荷が大きく、従来手法では正確かつ効率的な変位追跡や変位ベクトルの取得は容易ではない。
【0008】
また、航空・衛星写真測量技術を用いる場合、地滑り等の発生前後の撮影時期に大きな間隔が空いたり、撮影の季節が異なり得る。このような場合、地表面の変位以外の要因で航空・衛星写真の内容に相違が生じ、航空・衛星写真測量技術を用いた自動変位計測では精度が低下し得るという問題がある。
【0009】
本発明は上記問題点を解決するためになされたものであり、航空・衛星写真を必要とせずに地形データに基づいて、観測対象領域内の注目部分の三次元的な変位を効率的に検出し良好な精度で計測する変位計測装置、変位計測方法及び変位計測プログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る変位計測装置は、観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換部と、複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理部と、前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算部と、前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算部と、を有する。
【0011】
本発明に係る変位計測方法は、観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換ステップと、複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理ステップと、前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算ステップと、前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算ステップと、を有する。
【0012】
本発明に係る変位計測プログラムは、コンピュータを変位計測手段として機能させるための変位計測プログラムであって、コンピュータに、観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換機能と、複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理機能と、前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算機能と、前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算機能と、を実現させる。
【発明の効果】
【0013】
本発明によれば、撮影間隔の影響を受け易い航空・衛星写真を必要とせずに、地形データに基づいて、観測対象領域内の変位追跡点の三次元的な変位を効率的かつ良好な精度で計測することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る変位計測システムの概略のブロック図である。
【図2】演算処理装置における処理の概略のフロー図である。
【図3】起伏特徴画像上での追跡処理を説明する模式図である。
【図4】図3の処理から得られる二次元変位ベクトルを示す模式図である。
【図5】地形データの模式図である。
【図6】二次元変位ベクトルから三次元変位ベクトルを求める処理を説明する模式図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)である変位計測システム2について、図面に基づいて説明する。本システムは地滑り等により生じる地表の変位計測に用いられる。図1は、変位計測システム2の概略の構成を示すブロック図である。本システムは、演算処理装置4、記憶装置6、入力装置8及び出力装置10を含んで構成される。演算処理装置4として、本システムの各種演算処理を行う専用のハードウェアを作ることも可能であるが、本実施形態では演算処理装置4は、コンピュータ及び、当該コンピュータ上で実行されるプログラムを用いて構築される。
【0016】
当該コンピュータのCPU(Central Processing Unit)が演算処理装置4を構成し、後述するウェーブレット変換部20、追跡処理部22、三次元座標演算部24及び変位ベクトル演算部26として機能する。
【0017】
記憶装置6はコンピュータに内蔵されるハードディスクなどで構成される。記憶装置6は演算処理装置4をウェーブレット変換部20、追跡処理部22、三次元座標演算部24及び変位ベクトル演算部26として機能させるためのプログラム及びその他のプログラムや、本システムの処理に必要な各種データを記憶する。例えば、記憶装置6は、処理対象データとして複数の時期に取得された観測対象領域の航空レーザ計測データ又は地形データを格納する。例えば、観測対象領域として地滑りが生じた地域を設定し、当該領域において地滑りの前後に航空レーザ計測データ又は地形データを取得する。
【0018】
入力装置8は、キーボード、マウスなどであり、ユーザが本システムへの操作を行うために用いる。
【0019】
出力装置10は、ディスプレイ、プリンタなどであり、本システムにより求められた変位計測結果を画面表示、印刷等によりユーザに示す等に用いられる。また、変位計測結果に関するデータを他のシステムで利用できるよう、データとして出力してもよい。
【0020】
ウェーブレット変換部20は、観測対象領域の地形データをウェーブレット変換する。当該変換により生成される画像を、ここでは起伏特徴画像と称する。
【0021】
追跡処理部22は複数時刻の地形データそれぞれから生成される起伏特徴画像について時刻相互間でのパターンマッチングを行う。パターンマッチング処理により、或る時刻にて観測対象領域の起伏特徴画像上の変位追跡点が、他の時刻における起伏特徴画像のどの位置と対応するかが探索される。パターンマッチング処理については、後述する。
【0022】
三次元座標演算部24は、変位追跡点の起伏特徴画像上での位置、及び当該位置での地形データの高さ情報に基づいて、当該変位追跡点の三次元座標を求める。
【0023】
変位ベクトル演算部26は、各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める。
【0024】
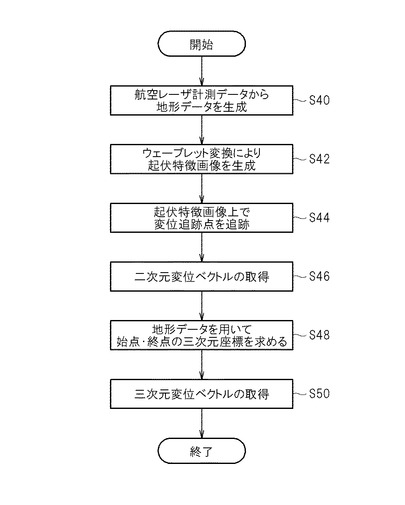
以下、演算処理装置4にて行われる処理について説明する。図2は、演算処理装置4における処理の概略のフロー図である。航空レーザ計測では、レーザ測距データとGPS/IMU(Global Positioning System/Inertial Measurement Unit)データとからなる航空レーザ計測データが航空機等の飛行中に蓄積され、当該航空レーザ計測データを処理することにより数値表層モデル(Digital Surface Model:DSM)や数値地形モデル(Digital Terrain Model:DTM)が生成される。ここで、DSMは建物や樹木の高さを含み、一方、DTMは、建物や樹木の高さを取り除いた地表の高さを表す。DTMは、航空レーザ計測データから作成したDSMをフィルタリング処理することにより生成することができる。
【0025】
地滑りに伴う地表の変位を計測する際に、演算処理装置4は例えば、処理対象データとして航空レーザ計測データを与えられている場合には、当該航空レーザ計測データから地形データとしてDTM、又はDSMを生成する(S40)。当該処理S40は複数時期の処理対象データそれぞれについて行われる。
【0026】
一方、処理対象データとしてDTM、又はDSMが与えられている場合には、これを地形データとして用いてもよい。この場合、地形データの生成処理S40は省略できる。
【0027】
地形データは、地形の三次元座標のデータである。例えば、地形データは、xyz直交座標系を用いて表され、水平面をなすxy平面の各点に、地表の高さを表すz座標値が対応付けられる。
【0028】
ウェーブレット変換部20は観測対象領域の複数時期の地形データをそれぞれウェーブレット変換し、起伏特徴画像を生成する(S42)。ウェーブレット変換では、ウェーブレット関数と呼ばれる局在性を有する波の関数を地表の起伏にあてはめ、その波と起伏との相関関係の程度を表すウェーブレット係数を求める。地形データに対するウェーブレット変換は、地形面の微細な起伏(微地形)を強調することができる。
【0029】
ウェーブレット関数には様々なものが存在するが、連続ウェーブレット変換によく用いられるものとしてメキシカンハット(Mexican Hat)関数があり、離散ウェーブレット変換に用いられるものとしてハール(Haar)関数がある。xy平面で定義される2次元のメキシカンハット関数ψ(x,y)は次式で表される。
【0030】
【数1】

【0031】
このメキシカンハット関数ψを用いた場合のxy平面内の任意の座標(a,b)でのウェーブレット係数Cは次式で表される。
【0032】
【数2】
【0033】
ここで、z(x,y)は座標(x,y)でのz座標値であり、地形データにより与えられる。また、sは関数ψのスケールである。スケールsに応じてウェーブレット関数の波の波長が変化し、z(x,y)に含まれる様々な周波数成分のうち係数Cに寄与する周波数が変化する。スケールsは、関心がある空間変化の周波数f(又は波長λ)に応じて設定される。なお、スケールsは、係数Cに寄与する成分の代表周波数fとの間に以下の関係を有する。
f=(5/2)1/2/2πs≒0.252/s
【0034】
また、波長λと周波数fとはλ=1/fの関係にあることから、
λ≒4s
となる。
【0035】
起伏特徴画像は、ウェーブレット係数C(s,a,b)を、xy平面内の座標(a,b)に対応する画素値とする画像であり、当該画像には段差、亀裂、凹地、小丘等の微地形が強調されて表現される。
【0036】
ハール関数を用いた離散ウェーブレット変換による解析においては、次式で表されるハール関数ψ及びスケーリング関数φを用いて、縦、横、対角方向それぞれに解析が進められる。
【0037】
【数3】
【0038】
追跡処理部22は、起伏特徴画像を追跡用画像として用いて、水平面内で変位追跡点を追跡して(S44)、二次元変位ベクトルを求める(S46)。変位追跡点の追跡には、例えば粒子画像流速測定法(Particle Image Velocimetry:PIV)やオプティカルフローなどの画像相関法を用いることができる。PIVは変位ベクトル検出の代表的な手法の1つであり、対象領域内における複数点での変位ベクトルを同時に取得することができる。具体的には、或る時刻にて観測対象領域に対応する起伏特徴画像上の変位追跡点を中心あるいは重心とする所定領域(例えば5×5画素)の画像をテンプレートとして用い、他の時刻における起伏特徴画像上でのマッチングを行って相互相関値を求める。他の時刻における起伏特徴画像上でのテンプレートとのマッチングを行う領域を順次ずらして、最も相互相関値が高くなる領域を対応領域とし、その中心あるいは重心を対応点とすることができる。ここで、探索に用いる画像領域は予め定めておく。あるいは、利用者が観測対象領域の地形データあるいは起伏特徴画像上で設定してもよく、例えば、作業者がディスプレイに表示された起伏特徴画像を見ながら入力装置8を操作して画像領域を設定することができる。
【0039】
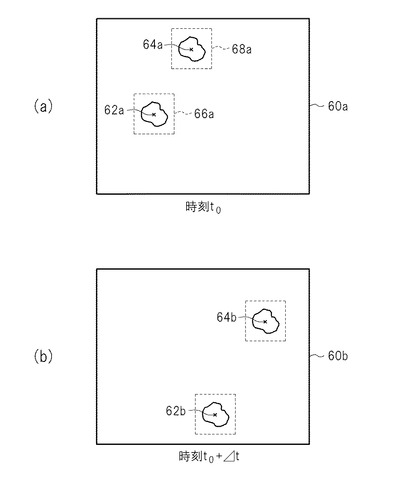
図3は、この起伏特徴画像上での追跡処理S44を説明する模式図である。図3(a)は、先行する時刻t0の起伏特徴画像60aにおける変位追跡点62a,64aを表している。当該変位追跡点を含む画像領域66a,68aを相関テンプレートとして、後続の時刻t0+Δtの起伏特徴画像60bに対するパターンマッチング処理を行う。その結果、図3(b)に示すように、時刻t0+Δtの起伏特徴画像60bにおける画像領域66a,68aの対応した領域の中心点あるいは重心点として、変位追跡点の対応点62b,64bが探索される。
【0040】
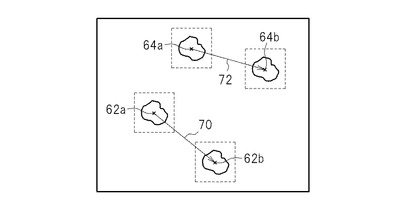
パターンマッチングにより、変位追跡点62aは後続時刻の起伏特徴画像60bにおける対応点62bに対応し、同様に、変位追跡点64aは対応点64bに対応すると判断される。すなわち、変位追跡点ごとに2時刻t0,t0+Δtでの対応点の対応が求められる。これにより、二次元変位ベクトルの始点となる時刻t0での変位追跡点の座標と、終点となる時刻t0+Δtでの対応点の座標とが求められる(S46)。図4は、時刻t0での変位追跡点62a,64aの位置を始点とし、時刻t0+Δtでの対応点62b,64bの位置を終点とする二次元変位ベクトル70,72を示す模式図である。
【0041】
起伏特徴画像上にて得られた二次元変位ベクトルの始点、終点は三次元座標演算部24により地形データを用いて三次元座標に変換され(S48)、当該三次元座標を用いて変位ベクトル演算部26は三次元変位ベクトルを求める(S50)。
【0042】
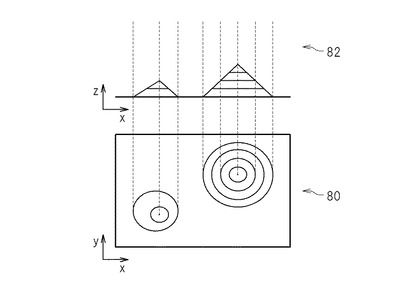
図5は上述した地形データの模式図であり、水平面であるxy平面への投影図80と、zx平面への投影図82とを示している。図6は、二次元変位ベクトルから三次元変位ベクトルを求める処理S48,S50を説明する模式図である。図6は、地形データのxy平面への投影図80上に配置した二次元変位ベクトル90と、当該二次元変位ベクトル90から得られる三次元変位ベクトル92とを示している。
【0043】
三次元座標演算部24は、投影図80上での二次元変位ベクトルの始点PS、終点PEに、地形データから得られるそれぞれの位置でのz座標値を付与し、PS,PEをそれぞれ三次元空間での点QS,QEに対応付ける。これにより、三次元変位ベクトルの始点QS及び終点QEの座標が求められる(S48)。このとき、時刻t0で与えられる始点PSに対応する始点QSのz座標は、時刻t0の地形データを用いて求められ、時刻t0+Δtで与えられる終点PEに対応する終点QEのz座標は時刻t0+Δtの地形データを用いて求められる。
【0044】
変位ベクトル演算部26は、QS及びQEの座標に基づいて三次元変位ベクトルを求める。
【0045】
上述したウェーブレット変換を用いた地形解析手法は、従来の開度、傾斜量、固有値比、地表面粗度、ラプラシアン、曲率、水系網、セミバァリオグラム等の地形解析手法と比べ、次に述べる特徴を有している。まず、ウェーブレット変換により生成される起伏特徴画像は微地形の状況を良く反映し、当該画像から地表面の細部まで明瞭に読み取れる。当該画像には微妙な起伏も表現され、地表面の凹凸情報が明瞭になっている。また、地形的な勾配急変化点などが強調され、それらの点を読み取りやすい。このため、地表面の変状を確実に捉えることができ、非常に効果的に地すべり地形を判読できる。さらに、起伏特徴画像は、非常に多くの地表面情報を反映する豊富なテクスチャを有しており、地形や地すべりの解析において目視判読に適するだけではなく、画像解析技術を用いた自動処理にも適する。
【0046】
変位計測システム2で用いる地形データは航空レーザ計測データ以外のデータから生成したものでもよい。例えば、地上レーザ計測データを処理対象データとして地形データを生成してもよい。また、航空機・衛星合成開口レーダ(Synthetic Aperture Radar:SAR)で取得した地形データ、航空・衛星写真測量で取得した地形データを用いてもよい。
【符号の説明】
【0047】
2 変位計測システム、4 演算処理装置、6 記憶装置、8 入力装置、10 出力装置、20 ウェーブレット変換部、22 追跡処理部、24 三次元座標演算部、26 変位ベクトル演算部。
【技術分野】
【0001】
本発明は、地表面の三次元的な変位を計測する変位計測装置、変位計測方法、及び変位計測プログラムに関する。
【背景技術】
【0002】
変位計測技術は、例えば、地滑りの解析・対策、土工事や土構造物の構築・管理等において重要である。
【0003】
変位計測技術にはいろいろな方式が提案されており、地滑り現象に関しては、例えば、測量を行いたい対象物上に予め反射板を設置し、光の照射及び反射光の観測により移動量を計測するものなどが知られている。また、航空・衛星写真測量技術を用いるものも知られている。航空・衛星写真測量技術を用いる方式は反射板等の設置が不要であるので、広い範囲や近寄りにくい場所の地滑り観測に好適である。従来、航空・衛星写真測量技術を利用して地滑り解析を行う場合、地滑り前後の空中・衛星写真や地形データを用いて、地滑りによる地形変化を把握している。
【0004】
当該地形変化の解析の従来の基本的な手法では、人間が目視により画像から変位追跡点を探し出し、画像間の変位特徴点の対応付けをマニュアル操作で行って、変位ベクトルを求める。
【0005】
地形データは、例えば航空レーザ計測により高精度に取得することができる。なお、レーザ計測は画像のような色彩情報、テクスチャ情報を取得することができず、レーザ計測データのみでは変位計測点を高精度に特定することが難しい。そのため、従来、色彩やテクスチャの情報が得られる空中写真と合わせて変位計測に用いられている。
【先行技術文献】
【特許文献】
【0006】
【非特許文献1】小岩弘道、福澤由美子、稲澤保行、「八幡平澄川地すべり計測及び解析−GISを利用した解析例−」、APA、財団法人日本測量調査技術協会、1999年12月、No.74、p.60−65
【発明の概要】
【発明が解決しようとする課題】
【0007】
地滑りのように広範囲で変位特徴点が多数となり得る解析は、人間の作業への負荷が大きく、従来手法では正確かつ効率的な変位追跡や変位ベクトルの取得は容易ではない。
【0008】
また、航空・衛星写真測量技術を用いる場合、地滑り等の発生前後の撮影時期に大きな間隔が空いたり、撮影の季節が異なり得る。このような場合、地表面の変位以外の要因で航空・衛星写真の内容に相違が生じ、航空・衛星写真測量技術を用いた自動変位計測では精度が低下し得るという問題がある。
【0009】
本発明は上記問題点を解決するためになされたものであり、航空・衛星写真を必要とせずに地形データに基づいて、観測対象領域内の注目部分の三次元的な変位を効率的に検出し良好な精度で計測する変位計測装置、変位計測方法及び変位計測プログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る変位計測装置は、観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換部と、複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理部と、前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算部と、前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算部と、を有する。
【0011】
本発明に係る変位計測方法は、観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換ステップと、複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理ステップと、前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算ステップと、前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算ステップと、を有する。
【0012】
本発明に係る変位計測プログラムは、コンピュータを変位計測手段として機能させるための変位計測プログラムであって、コンピュータに、観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換機能と、複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理機能と、前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算機能と、前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算機能と、を実現させる。
【発明の効果】
【0013】
本発明によれば、撮影間隔の影響を受け易い航空・衛星写真を必要とせずに、地形データに基づいて、観測対象領域内の変位追跡点の三次元的な変位を効率的かつ良好な精度で計測することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る変位計測システムの概略のブロック図である。
【図2】演算処理装置における処理の概略のフロー図である。
【図3】起伏特徴画像上での追跡処理を説明する模式図である。
【図4】図3の処理から得られる二次元変位ベクトルを示す模式図である。
【図5】地形データの模式図である。
【図6】二次元変位ベクトルから三次元変位ベクトルを求める処理を説明する模式図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)である変位計測システム2について、図面に基づいて説明する。本システムは地滑り等により生じる地表の変位計測に用いられる。図1は、変位計測システム2の概略の構成を示すブロック図である。本システムは、演算処理装置4、記憶装置6、入力装置8及び出力装置10を含んで構成される。演算処理装置4として、本システムの各種演算処理を行う専用のハードウェアを作ることも可能であるが、本実施形態では演算処理装置4は、コンピュータ及び、当該コンピュータ上で実行されるプログラムを用いて構築される。
【0016】
当該コンピュータのCPU(Central Processing Unit)が演算処理装置4を構成し、後述するウェーブレット変換部20、追跡処理部22、三次元座標演算部24及び変位ベクトル演算部26として機能する。
【0017】
記憶装置6はコンピュータに内蔵されるハードディスクなどで構成される。記憶装置6は演算処理装置4をウェーブレット変換部20、追跡処理部22、三次元座標演算部24及び変位ベクトル演算部26として機能させるためのプログラム及びその他のプログラムや、本システムの処理に必要な各種データを記憶する。例えば、記憶装置6は、処理対象データとして複数の時期に取得された観測対象領域の航空レーザ計測データ又は地形データを格納する。例えば、観測対象領域として地滑りが生じた地域を設定し、当該領域において地滑りの前後に航空レーザ計測データ又は地形データを取得する。
【0018】
入力装置8は、キーボード、マウスなどであり、ユーザが本システムへの操作を行うために用いる。
【0019】
出力装置10は、ディスプレイ、プリンタなどであり、本システムにより求められた変位計測結果を画面表示、印刷等によりユーザに示す等に用いられる。また、変位計測結果に関するデータを他のシステムで利用できるよう、データとして出力してもよい。
【0020】
ウェーブレット変換部20は、観測対象領域の地形データをウェーブレット変換する。当該変換により生成される画像を、ここでは起伏特徴画像と称する。
【0021】
追跡処理部22は複数時刻の地形データそれぞれから生成される起伏特徴画像について時刻相互間でのパターンマッチングを行う。パターンマッチング処理により、或る時刻にて観測対象領域の起伏特徴画像上の変位追跡点が、他の時刻における起伏特徴画像のどの位置と対応するかが探索される。パターンマッチング処理については、後述する。
【0022】
三次元座標演算部24は、変位追跡点の起伏特徴画像上での位置、及び当該位置での地形データの高さ情報に基づいて、当該変位追跡点の三次元座標を求める。
【0023】
変位ベクトル演算部26は、各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める。
【0024】
以下、演算処理装置4にて行われる処理について説明する。図2は、演算処理装置4における処理の概略のフロー図である。航空レーザ計測では、レーザ測距データとGPS/IMU(Global Positioning System/Inertial Measurement Unit)データとからなる航空レーザ計測データが航空機等の飛行中に蓄積され、当該航空レーザ計測データを処理することにより数値表層モデル(Digital Surface Model:DSM)や数値地形モデル(Digital Terrain Model:DTM)が生成される。ここで、DSMは建物や樹木の高さを含み、一方、DTMは、建物や樹木の高さを取り除いた地表の高さを表す。DTMは、航空レーザ計測データから作成したDSMをフィルタリング処理することにより生成することができる。
【0025】
地滑りに伴う地表の変位を計測する際に、演算処理装置4は例えば、処理対象データとして航空レーザ計測データを与えられている場合には、当該航空レーザ計測データから地形データとしてDTM、又はDSMを生成する(S40)。当該処理S40は複数時期の処理対象データそれぞれについて行われる。
【0026】
一方、処理対象データとしてDTM、又はDSMが与えられている場合には、これを地形データとして用いてもよい。この場合、地形データの生成処理S40は省略できる。
【0027】
地形データは、地形の三次元座標のデータである。例えば、地形データは、xyz直交座標系を用いて表され、水平面をなすxy平面の各点に、地表の高さを表すz座標値が対応付けられる。
【0028】
ウェーブレット変換部20は観測対象領域の複数時期の地形データをそれぞれウェーブレット変換し、起伏特徴画像を生成する(S42)。ウェーブレット変換では、ウェーブレット関数と呼ばれる局在性を有する波の関数を地表の起伏にあてはめ、その波と起伏との相関関係の程度を表すウェーブレット係数を求める。地形データに対するウェーブレット変換は、地形面の微細な起伏(微地形)を強調することができる。
【0029】
ウェーブレット関数には様々なものが存在するが、連続ウェーブレット変換によく用いられるものとしてメキシカンハット(Mexican Hat)関数があり、離散ウェーブレット変換に用いられるものとしてハール(Haar)関数がある。xy平面で定義される2次元のメキシカンハット関数ψ(x,y)は次式で表される。
【0030】
【数1】
【0031】
このメキシカンハット関数ψを用いた場合のxy平面内の任意の座標(a,b)でのウェーブレット係数Cは次式で表される。
【0032】
【数2】
【0033】
ここで、z(x,y)は座標(x,y)でのz座標値であり、地形データにより与えられる。また、sは関数ψのスケールである。スケールsに応じてウェーブレット関数の波の波長が変化し、z(x,y)に含まれる様々な周波数成分のうち係数Cに寄与する周波数が変化する。スケールsは、関心がある空間変化の周波数f(又は波長λ)に応じて設定される。なお、スケールsは、係数Cに寄与する成分の代表周波数fとの間に以下の関係を有する。
f=(5/2)1/2/2πs≒0.252/s
【0034】
また、波長λと周波数fとはλ=1/fの関係にあることから、
λ≒4s
となる。
【0035】
起伏特徴画像は、ウェーブレット係数C(s,a,b)を、xy平面内の座標(a,b)に対応する画素値とする画像であり、当該画像には段差、亀裂、凹地、小丘等の微地形が強調されて表現される。
【0036】
ハール関数を用いた離散ウェーブレット変換による解析においては、次式で表されるハール関数ψ及びスケーリング関数φを用いて、縦、横、対角方向それぞれに解析が進められる。
【0037】
【数3】
【0038】
追跡処理部22は、起伏特徴画像を追跡用画像として用いて、水平面内で変位追跡点を追跡して(S44)、二次元変位ベクトルを求める(S46)。変位追跡点の追跡には、例えば粒子画像流速測定法(Particle Image Velocimetry:PIV)やオプティカルフローなどの画像相関法を用いることができる。PIVは変位ベクトル検出の代表的な手法の1つであり、対象領域内における複数点での変位ベクトルを同時に取得することができる。具体的には、或る時刻にて観測対象領域に対応する起伏特徴画像上の変位追跡点を中心あるいは重心とする所定領域(例えば5×5画素)の画像をテンプレートとして用い、他の時刻における起伏特徴画像上でのマッチングを行って相互相関値を求める。他の時刻における起伏特徴画像上でのテンプレートとのマッチングを行う領域を順次ずらして、最も相互相関値が高くなる領域を対応領域とし、その中心あるいは重心を対応点とすることができる。ここで、探索に用いる画像領域は予め定めておく。あるいは、利用者が観測対象領域の地形データあるいは起伏特徴画像上で設定してもよく、例えば、作業者がディスプレイに表示された起伏特徴画像を見ながら入力装置8を操作して画像領域を設定することができる。
【0039】
図3は、この起伏特徴画像上での追跡処理S44を説明する模式図である。図3(a)は、先行する時刻t0の起伏特徴画像60aにおける変位追跡点62a,64aを表している。当該変位追跡点を含む画像領域66a,68aを相関テンプレートとして、後続の時刻t0+Δtの起伏特徴画像60bに対するパターンマッチング処理を行う。その結果、図3(b)に示すように、時刻t0+Δtの起伏特徴画像60bにおける画像領域66a,68aの対応した領域の中心点あるいは重心点として、変位追跡点の対応点62b,64bが探索される。
【0040】
パターンマッチングにより、変位追跡点62aは後続時刻の起伏特徴画像60bにおける対応点62bに対応し、同様に、変位追跡点64aは対応点64bに対応すると判断される。すなわち、変位追跡点ごとに2時刻t0,t0+Δtでの対応点の対応が求められる。これにより、二次元変位ベクトルの始点となる時刻t0での変位追跡点の座標と、終点となる時刻t0+Δtでの対応点の座標とが求められる(S46)。図4は、時刻t0での変位追跡点62a,64aの位置を始点とし、時刻t0+Δtでの対応点62b,64bの位置を終点とする二次元変位ベクトル70,72を示す模式図である。
【0041】
起伏特徴画像上にて得られた二次元変位ベクトルの始点、終点は三次元座標演算部24により地形データを用いて三次元座標に変換され(S48)、当該三次元座標を用いて変位ベクトル演算部26は三次元変位ベクトルを求める(S50)。
【0042】
図5は上述した地形データの模式図であり、水平面であるxy平面への投影図80と、zx平面への投影図82とを示している。図6は、二次元変位ベクトルから三次元変位ベクトルを求める処理S48,S50を説明する模式図である。図6は、地形データのxy平面への投影図80上に配置した二次元変位ベクトル90と、当該二次元変位ベクトル90から得られる三次元変位ベクトル92とを示している。
【0043】
三次元座標演算部24は、投影図80上での二次元変位ベクトルの始点PS、終点PEに、地形データから得られるそれぞれの位置でのz座標値を付与し、PS,PEをそれぞれ三次元空間での点QS,QEに対応付ける。これにより、三次元変位ベクトルの始点QS及び終点QEの座標が求められる(S48)。このとき、時刻t0で与えられる始点PSに対応する始点QSのz座標は、時刻t0の地形データを用いて求められ、時刻t0+Δtで与えられる終点PEに対応する終点QEのz座標は時刻t0+Δtの地形データを用いて求められる。
【0044】
変位ベクトル演算部26は、QS及びQEの座標に基づいて三次元変位ベクトルを求める。
【0045】
上述したウェーブレット変換を用いた地形解析手法は、従来の開度、傾斜量、固有値比、地表面粗度、ラプラシアン、曲率、水系網、セミバァリオグラム等の地形解析手法と比べ、次に述べる特徴を有している。まず、ウェーブレット変換により生成される起伏特徴画像は微地形の状況を良く反映し、当該画像から地表面の細部まで明瞭に読み取れる。当該画像には微妙な起伏も表現され、地表面の凹凸情報が明瞭になっている。また、地形的な勾配急変化点などが強調され、それらの点を読み取りやすい。このため、地表面の変状を確実に捉えることができ、非常に効果的に地すべり地形を判読できる。さらに、起伏特徴画像は、非常に多くの地表面情報を反映する豊富なテクスチャを有しており、地形や地すべりの解析において目視判読に適するだけではなく、画像解析技術を用いた自動処理にも適する。
【0046】
変位計測システム2で用いる地形データは航空レーザ計測データ以外のデータから生成したものでもよい。例えば、地上レーザ計測データを処理対象データとして地形データを生成してもよい。また、航空機・衛星合成開口レーダ(Synthetic Aperture Radar:SAR)で取得した地形データ、航空・衛星写真測量で取得した地形データを用いてもよい。
【符号の説明】
【0047】
2 変位計測システム、4 演算処理装置、6 記憶装置、8 入力装置、10 出力装置、20 ウェーブレット変換部、22 追跡処理部、24 三次元座標演算部、26 変位ベクトル演算部。
【特許請求の範囲】
【請求項1】
観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換部と、
複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理部と、
前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算部と、
前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算部と、
を有することを特徴とする変位計測装置。
【請求項2】
観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換ステップと、
複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理ステップと、
前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算ステップと、
前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算ステップと、
を有することを特徴とする変位計測方法。
【請求項3】
コンピュータを変位計測手段として機能させるための変位計測プログラムであって、コンピュータに、
観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換機能と、
複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理機能と、
前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算機能と、
前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算機能と、
を実現させることを特徴とする変位計測プログラム。
【請求項1】
観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換部と、
複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理部と、
前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算部と、
前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算部と、
を有することを特徴とする変位計測装置。
【請求項2】
観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換ステップと、
複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理ステップと、
前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算ステップと、
前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算ステップと、
を有することを特徴とする変位計測方法。
【請求項3】
コンピュータを変位計測手段として機能させるための変位計測プログラムであって、コンピュータに、
観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成するウェーブレット変換機能と、
複数時刻の前記地形データそれぞれから生成される前記起伏特徴画像について前記時刻相互間でのパターンマッチングを行い、前記観測対象領域内に設定された変位追跡点の前記起伏特徴画像上での対応点を追跡する追跡処理機能と、
前記起伏特徴画像上での前記対応点の位置、及び前記地形データの高さ情報に基づいて、前記変位追跡点の三次元座標を求める三次元座標演算機能と、
前記各時刻での前記変位追跡点の前記三次元座標に基づいて当該変位追跡点の三次元変位ベクトルを求める変位ベクトル演算機能と、
を実現させることを特徴とする変位計測プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−133341(P2011−133341A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−292872(P2009−292872)
【出願日】平成21年12月24日(2009.12.24)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月24日(2009.12.24)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]