
変位量測定装置及び変位量測定方法
【課題】撮影画像に基づき測定対象の変位量を測定するときに、測定対象に対するピントに関わらず変位量を正確に測定する。
【解決手段】標識80の撮影画像から、標識80に設けた一対の円形標示81の各中心Cを検出し、一対の円形標示81の撮影画像上の中心間距離と中心C間の中点位置Mを算出する。一対の円形標示81の撮影画像上の中心間距離と実空間の中心間距離から、撮影画像上の変位量を実空間の変位量に換算する換算係数を算出する。予め取得した標識80の基準撮影画像に基づく基準中点位置M1と所定時間後の中点位置M2とを比較し、基準中点位置M1に対する中点位置M2の撮影画像上の変位量を算出する。算出された変位量を換算係数に基づき実空間の変位量に換算し、標識80の変位量を測定する。
【解決手段】標識80の撮影画像から、標識80に設けた一対の円形標示81の各中心Cを検出し、一対の円形標示81の撮影画像上の中心間距離と中心C間の中点位置Mを算出する。一対の円形標示81の撮影画像上の中心間距離と実空間の中心間距離から、撮影画像上の変位量を実空間の変位量に換算する換算係数を算出する。予め取得した標識80の基準撮影画像に基づく基準中点位置M1と所定時間後の中点位置M2とを比較し、基準中点位置M1に対する中点位置M2の撮影画像上の変位量を算出する。算出された変位量を換算係数に基づき実空間の変位量に換算し、標識80の変位量を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象を撮影した撮影画像に基づき、測定対象の変位量を測定する変位量測定装置及び変位量測定方法に関する。
【背景技術】
【0002】
従来、特定の測定対象を撮影して撮影画像を画像処理し、測定対象の動きや変位を測定することが行われている。この画像による測定では、他の方式の測定に比べて、広範囲に亘る、かつ、複数の測定対象の変位量を一度に測定できる。また、このような変位量を測定する装置として、複数の固定カメラで撮影した画像を用いて、3次元的に変位量を求める装置が知られている(特許文献1参照)。
【0003】
ところで、従来から、1つのカメラで撮影した測定対象の画像により、測定対象の変位量を2次元的に求める変位量測定装置も使用されている。この変位量測定装置では、測定対象の撮影画像上における変位量を実際の3次元空間(実空間)の変位量に換算するため、測定対象の変位量の測定精度は、撮影画像上における変位量測定と換算の精度に直結して各精度に左右される。これに対し、例えば、測定対象として大きさが既知の標識を使用し、変位量を把握したい場所や物に標識を取り付けて、その撮影画像から標識を判別等することで、充分な変位量の測定精度を確保できる。
【0004】
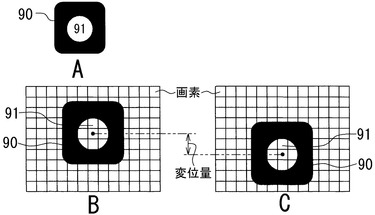
図9は、標識を使用した変位量の測定例を説明するための模式図であり、図9Aは標識の正面図、図9B、Cは標識の撮影画像を画素を表す升目とともに示す図である。
この標識90(図9A参照)には、矩形状の表面(撮影面)の中央部に、周辺の黒色部を背景にして、白色からなる所定径(ここでは直径30mm)の円形標示91が設けられている。
【0005】
変位量の測定時には、予め標識90の初期画像(図9B参照)を撮影し、この画像を基準撮影画像として所定時間(期間)後の標識90の撮影画像(図9C参照)と比較し、標識90の変位量を画像上で測定する。その際、撮影画像から円形標示91の直径(画素数)を検出し、実際の直径と画素数から、撮影画像の1画素と実空間の距離との対応関係を算出する。ここでは、円形標示91の直径(30mm)が撮影画像では3画素であるため、直径を画素数で割ることで1画素に対応する距離(30mm÷3画素=10mm/画素)が算出される。これより、撮影画像上の変位量を実空間の変位量に換算するための換算係数(10mm/画素)を取得する。また、基準撮影画像に対して所定時間後の撮影画像では、円形標示91の中心が下方に2画素分変位しており、この変位量と換算係数とを掛けて、実空間での標識90の変位量(10mm/画素×2画素=20mm)が算出される。
【0006】
このように、標識90を使用すると、撮影画像から測定対象を正確に認識できる。また、直径が既知の円形標示91の画像に基づき、撮影画像上の変位量の測定と換算係数の算出とを行うことで、それらの各精度、及び、実空間における変位量の測定精度を向上できる。しかしながら、この場合には、カメラの撮影領域内に複数の標識90を設置すると、設置状況によっては、カメラの被写界深度により、一部の標識90にのみピントが合い、他の標識90に対するピントがずれることがある。その結果、標識90がぼけて撮影されて、撮影画像で円形標示91が不鮮明になり、変位量の測定精度に影響が生じる虞がある。
【0007】
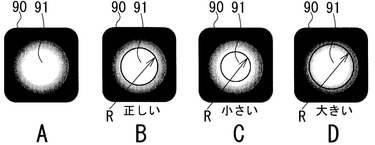
図10は、ピントがずれた標識90の画像例を示す図である。
標識90は、ピントが合わずに撮影されると、円形標示91(図10A参照)の輪郭がぼやけて識別し難くなり、正しい直径を検出するのが困難になる。即ち、撮影画像によっては、正しく認識(図10B参照)されたときの円形標示91の輪郭Rに比べて、輪郭Rが小さく(図10C参照)、又は、大きく(図10D参照)認識されて、円形標示91の直径の検出精度が低下することがある。
【0008】
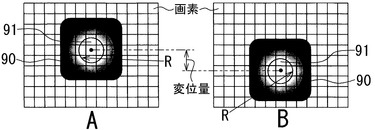
図11は、円形標示91が小さく認識されたときの変位量の測定例を説明するための模式図である。
この場合には、標識90の基準撮影画像(図11A参照)と所定時間後の撮影画像(図11B参照)を比較して、円形標示91の中心の変位量は2画素であると判別される。ただし、円形標示91は、輪郭Rが小さく認識されて、直径が正しい直径(3画素)よりも小さい2.5画素として検出され、変位量の換算係数がより大きく算出(30mm÷2.5画素=12mm/画素)される。その結果、実空間における標識90の変位量(12mm/画素×2画素=24mm)は、実際の変位量(20mm)よりも大きな値に換算される。
【0009】
以上のように、この標識90では、標識90の設置状況や撮影条件によっては、撮影画像から円形標示91の輪郭Rを正しく認識できずに、円形標示91の直径と変位量の換算係数の精度が変動して、正確に変位量を測定するのが難しくなる虞がある。従って、標識90に対するピントに関わらず、測定対象の変位量を正確に測定して一層の精度向上を図る観点から、更なる改良の余地がある。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2004−77377号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、このような問題に鑑みなされたものであって、その目的は、撮影画像に基づき測定対象の変位量を測定するときに、測定対象に対するピントに関わらず変位量を正確に測定し、変位量の測定精度を向上させることである。
【課題を解決するための手段】
【0012】
本発明は、測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定装置であって、測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する手段と、一対の図形標示の撮影画像上の中心間距離を求める手段と、一対の図形標示の中心間の中点位置を算出する手段と、算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する手段と、中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する手段と、を備えたことを特徴とする。
また、本発明は、測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定方法であって、測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する工程と、一対の図形標示の撮影画像上の中心間距離を求める工程と、一対の図形標示の中心間の中点位置を算出する工程と、算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する工程と、中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する工程と、を有することを特徴とする。
【発明の効果】
【0013】
本発明によれば、撮影画像に基づき測定対象の変位量を測定するときに、測定対象に対するピントに関わらず変位量を正確に測定でき、変位量の測定精度を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本実施形態の変位量測定装置の概略構成を模式的に示す斜視図である。
【図2】図1のカメラによる撮影画像を示す図である。
【図3】本実施形態の標識の変位量の測定について説明するための模式図である。
【図4】画素の輝度情報を利用して円形標示の中心を算出する原理を説明する図である。
【図5】ピントがずれた標識の変位量の測定について説明するための模式図である。
【図6】本実施形態の変位量測定装置の概略構成を示す機能ブロック図である。
【図7】本実施形態の変位量測定装置による初期設定の手順を示すフローチャートである。
【図8】本実施形態の変位量測定装置による変位量測定の手順を示すフローチャートである。
【図9】標識を使用した変位量の測定例を説明するための模式図である。
【図10】ピントがずれた標識の画像例を示す図である。
【図11】円形標示が小さく認識されたときの変位量の測定例を説明するための模式図である。
【発明を実施するための形態】
【0015】
以下、本発明の変位量測定装置と変位量測定方法の一実施形態について、図面を参照して説明する。
本実施形態の変位量測定装置及び測定方法は、1つのカメラにより変位量の測定対象を撮影し、測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定装置、及び、この変位量測定装置における変位量測定方法である。以下では、測定対象として所定の標示を有する標識を使用し、複数の標識を、それぞれ変位量を把握したい場所や物等の対象物に貼り付けや固定、又は描く等して設け、それらを同時に撮影する場合を例に採り説明する。
【0016】
図1は、本実施形態の変位量測定装置の概略構成を模式的に示す斜視図である。
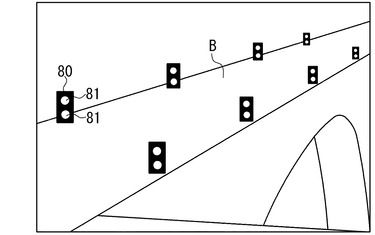
変位量測定装置1は、図示のように、標識80の撮影装置であるカメラ2と、カメラ2による撮影画像を処理する画像処理装置10とを備えている。カメラ2は、変位量を測定したい領域(ここでは橋B)に向けて、その全体が撮影範囲内に入るように設置され、橋Bを含む領域を撮影して、撮影画像を有線又は無線で接続された画像処理装置10に出力する。また、ここでは、標識80は、予め、橋Bの上面の両側部に沿って所定間隔で複数配置され、それぞれ標示81が設けられた撮影面をカメラ2の方向に向けて設置される。
【0017】
図2は、図1のカメラ2による撮影画像を示す図である。
カメラ2で撮影すると、図示のように、橋Bとともに、複数の標識80がカメラ2からの距離に応じた大きさで各位置に撮影される。この変位量測定装置1では、予め撮影した標識80の基準となる撮影画像を基準撮影画像(初期画像)とし、所定時間(期間)後に撮影された画像を基準撮影画像と比較する。これにより、基準撮影画像における標識80の基準(初期)位置に対して、比較する撮影画像における標識80の位置がどれだけ動いたかを検出し、各標識80及び、その設置位置の橋Bの変位量を画像上で測定する。
【0018】
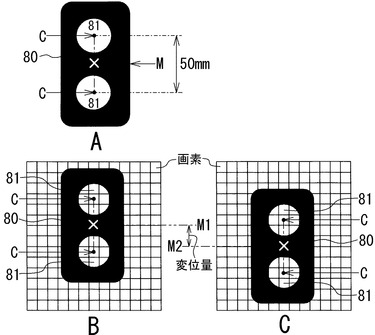
図3は、標識80の変位量の測定について説明するための模式図であり、図3Aは標識80の正面図、図3Bは、1つの標識80を含む範囲を抜き出して画素を表す升目とともに示す基準撮影画像である。また、図3Cは、基準撮影画像の撮影から所定時間が経過した現在の撮影画像であり、図3Bと同じ標識80を図3Bと同じ範囲の画像で示している。
標識80(図3A参照)には、矩形状の撮影面に、周辺の黒色部を背景にして、白色からなる一対の図形標示81が互いに離間して設けられている。一対の図形標示81は、円形や正多角形等の中心Cが特定可能な標示であり、互いの中心C間の距離(中心間距離)が所定距離に設定されている。ここでは、一対の図形標示81は同じ所定径の円形標示81からなり、直径が30mm、中心間距離が50mmに設定され、標識80の幅方向の中央部に上下に並べて設けられている。
【0019】
本実施形態では、一対の円形標示81の中間点を標識80の位置とし、各撮影画像の対応する標識80同士を比較して、その位置の変化から変位量を測定する。そのため、撮影画像から標識80を判別して、一対の円形標示81の各中心Cを検出し、中心C同士を結んだ線上の中点を求めて、検出された中心C間の撮影画像上における中点位置M(図では、黒色の標識80中に仮想的に白い×印で示しており、×印の中央の交点が中点位置Mである)を算出する。このように算出される基準撮影画像(図3B参照)の基準中点位置M1と、所定時間後の撮影画像(図3C参照)の中点位置M2とを比較し、それらの差から、中点位置M2(標識80)の撮影画像上の変位量を取得する。ここでは、所定時間後の中点位置M2は、基準中点位置M1に対して下方に2画素分変位しており、変位量は2画素になっている。
【0020】
また、一対の中心C間の撮影画像上における間隔(画素数)を検出して、撮影画像から一対の円形標示81の中心間距離を求め、この中心間距離を表す画素数と実際の中心間距離から、撮影画像の1画素と実空間の距離との対応関係を算出する。ここでは、一対の円形標示81の中心間距離(50mm)が撮影画像では5画素であるため、中心間距離を画素数で割ることで1画素に対応する距離(50mm÷5画素=10mm/画素)が算出される。これより、中点位置M2の撮影画像上の変位量を実空間の変位量に換算するための換算係数(10mm/画素)を取得する。この換算係数と中点位置M2の変位量とを掛けて、撮影画像上の中点位置M2の変位量を実空間での変位量(10mm/画素×2画素=20mm)に換算し、実空間での標識80の変位量を20mmと測定する。
【0021】
ここで、本実施形態では、標識80の撮影画像に基づき、画像を構成する各画素の輝度情報を加味して円形標示81の中心Cを算出し、中心間距離と中点位置M2の変位量を画素単位未満で正確に算出する。
図4は、画素の輝度情報を利用して円形標示81の中心Cを算出する原理を説明する図であり、図3よりも大きく撮影された標識80の1つの円形標示81を含む上側部分を抜き出して、その付近の撮影画像を模式的に示している。また、図4Aは、標識80と円形標示81の輪郭が画素を示す升目に一致した状態を示し、図4Bは、図4Aの標識80が変位して各輪郭が升目の上に懸かった状態を示している。
【0022】
円形標示81(図4A参照)の中心Cの付近にXY座標の原点を設けて、横方向のX軸と縦方向のY軸を、それぞれ画素内を通るように設定すると、円形標示81内の各画素の位置がXY座標により(x、y)で表される。その際、各画素の座標は、原点で両座標が0であり、各座標軸に沿って画素を単位に−2、−1、0、1、2等となる。また、各座標の画素の輝度値を、白を1、黒を0として、0〜1に正規化された値Wで表すと、円形標示81の中心Cは、XY座標や値Wを基に、次の計算式(数1)により座標が算出される。
【0023】
【数1】

【0024】
ここでは、中心Cの座標が(0.5、0.5)となる図4Aに示す円形標示81に対し、標識80が0.3画素下方に変位した図4Bに示す円形標示81の中心Cについて、具体的に座標を算出する例を説明する。なお、標識80の変位に伴い、標識80と円形標示81の輪郭部分は、一部が画素内に位置することになり、その画素内における割合に応じて、輪郭部分の画素が白と黒の間の色(灰色)となって現れ、各輝度値が0〜1の間の値Wになる。図4Bでは、輪郭部分の割合が少なく、白側の色の画素(W=0.7)に複数の点を付し、輪郭部分の割合が多く、黒側の色の画素(W=0.3)に斜線でハッチングを付して、それぞれ白色の画素(W=1)と区別して示す。図4Bに示す円形標示81を計算式(数1)に適用すると、中心Cの座標は次の(数2)に示すように算出される。
【0025】
【数2】
【0026】
その結果、図4Bに示す円形標示81の中心座標は(0.5、0.2)であり、図4Aに示す円形標示81の中心座標(0.5、0.5)に対して、Y軸方向に−0.3画素(下方へ0.3画素)の変位となり、正しい結果が得られている。
【0027】
このように、本実施形態では、円形標示81の撮影画像から画像を構成する画素の輝度を測定し、画素の位置座標に各画素の測定した輝度情報の重みを付けて、円形標示81の画像の位置座標上での中心位置(座標)を算出(以下、サブピクセル処理という)する。このサブピクセル処理を一対の円形標示81に対して行い、標識80に設けられた一対の円形標示81の中心Cをそれぞれ検出する。また、これら中心Cの位置や座標に基づき、一対の円形標示81の撮影画像上の中心間距離と、両中心C間の撮影画像上における中点位置Mを算出する。これにより、撮影画像(図3参照)に基づき、中心間距離と中点位置Mを画素単位未満で正確に求めて、精度の高い中点位置M2の変位量と、その実空間の変位量への換算係数を上記のように取得し、実空間での標識80の変位量を精度よく測定する。
【0028】
変位量測定装置1は、カメラ2による撮影画像(図2参照)に基づき、画像処理装置10(図1参照)により画像処理して、複数の標識80を判別し、各円形標示81の中心位置を算出して一対の中心Cを検出し、それぞれの標識80の変位量を測定する。また、この変位量測定装置1は、一部又は全部の標識80に対するピントが合わずに、標識80がぼけて撮影され、円形標示81が不鮮明(図10参照)になったときでも、ピントが合う標識80に対してと同様に変位量を測定する。即ち、変位量測定装置1は、ピントに関わらず、円形標示81が撮影された部分の画素の輝度情報に基づき、上記したサブピクセル処理により円形標示81の中心位置を算出する。その際、撮影画像で円形標示81の輪郭がぼやけて正しく認識できない状態でも、円形標示81のぼやけた部分を含む各画素の輝度を取得し、輝度を重みにして中心位置を算出する。これにより、一対の円形標示81の中心Cを正確に検出する。
【0029】
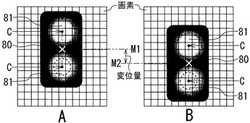
図5は、ピントがずれた標識80の変位量の測定について説明するための模式図であり、図5Aは、1つの標識80を含む範囲を抜き出して画素を表す升目とともに示す基準撮影画像である。また、図5Bは、基準撮影画像の撮影から所定時間が経過した撮影画像であり、図5Aと同じ標識80を図5Aと同じ範囲の画像で示している。
【0030】
変位量測定装置1は、画像処理装置10により、各撮影画像に基づきサブピクセル処理を行い、標識80に設けられた円形標示81内で中心位置を算出し、図示のように、一対の円形標示81の各中心Cを検出する。この検出した中心Cの位置(座標)から中心C間の中点位置Mを算出し、基準撮影画像(図5A参照)の基準中点位置M1と、所定時間後の撮影画像(図5B参照)の中点位置M2とを比較し、中点位置M2(標識80)の変位量を取得する。ここでは、撮影画像上で、基準中点位置M1に対して、中点位置M2が下方に2画素分変位しており、所定時間後の中点位置M2の変位量は2画素であると判定される。
【0031】
また、中心Cの各位置から、一対の円形標示81の撮影画像上における中心間距離を求めて、この中心間距離を表す画素数と実際の中心間距離から、上記した換算係数を算出する。ここでは、一対の円形標示81の中心間距離(50mm)が撮影画像では5画素であり、これらから、1画素に対応する距離である換算係数(50mm÷5画素=10mm/画素)が算出される。この換算係数により中点位置M2の撮影画像上の変位量を換算して、実空間での中点位置M2の変位量を算出(10mm/画素×2画素=20mm)する。このように、ピントが合っていない標識80に対しても、円形標示81の輪郭によらずに、一対の円形標示81の中心Cを正確に検出して、標識80の変位量を精度よく測定する。
【0032】
図6は、以上説明した変位量測定装置1の概略構成を示す機能ブロック図である。
変位量測定装置1は、図示のように、カメラ2と画像処理装置10に加えて、画像処理装置10の操作に使用し、変位量測定に関する設定や条件等を入力する入力装置3と、画像や情報を表示する表示装置(図示せず)とを備えている。カメラ2は、画像を撮影するデジタルカメラやデジタルビデオカメラ等からなり、画像処理装置10により制御されて、橋Bとともに複数の標識80を所定の間隔やタイミングで撮影し、撮影画像を電気信号に変換等して画像データを画像処理装置10へ出力する。
【0033】
画像処理装置10は、全体を制御するCPU(Central Processing Unit)20、CPU20がアクセスするデータを一時的に記憶するRAM(Random Access Memory)30、及び制御や各処理のためのプログラムを格納するROM(Read Only Memory)(図示せず)等を備えたコンピュータから構成されている。また、画像処理装置10は、カメラ2及び入力装置3と接続するためのインタフェース11を備え、インタフェース11を介して、画像データや入力信号を含む各種データを送受信する。画像処理装置10は、CPU20で所定のプログラムを実行することで、カメラ2から取得する撮影画像を画像処理等して、変位量測定に関する上記した各処理を行う。そのため、画像処理装置10は、CPU20による機能実現手段として、標識探索部21と、標識探索部21の一部の機能を担う前処理部21A、座標算出部21B、及び変位量算出部21Cとを有する。
【0034】
RAM30には、カメラ2から取得する画像を記憶する取得画像領域31と、変位量の測定に関する基準データや途中データを記憶する測定用データ領域32と、変位量の測定等に必要な各種設定値を記憶する各種設定値領域33とが設けられている。また、測定用データ領域32には、各標識80の変位量測定の基準となる基準位置32A(例えば、最初に取得した初期位置)と、撮影画像上の変位量を実空間の変位量に換算するための換算係数32Bと、画像処理や変位量の測定時に使用する各種閾値32Cが記憶されている。なお、各種閾値32Cとしては、例えば、撮影画像から標識80を判別する閾値や、標識80から一対の円形標示81を判別する閾値、或いは、標識80の変位量の測定値と比較して変位の有無や変位の上限値を越えた否かを判定するための変位量の閾値が記憶される。
【0035】
次に、本実施形態の変位量測定装置1により、測定対象である標識80の変位量を測定する処理や手順の流れについて説明する。
図7は、変位量測定装置1による初期設定の手順を示すフローチャートである。
この変位量測定装置1では、標識80の変位量の測定開始前に、変位量の測定に必要なデータを予め取得して測定のための初期設定を行う。初期設定開始に伴い、図示のように、まず、カメラ2により、複数の標識80が設置された橋Bを撮影し、変位量測定の基準となる基準位置の標識80が撮影された基準撮影画像を取得して(S101)、取得画像領域31に記憶する。
【0036】
また、前処理部21Aにより基準撮影画像に対して前処理を行い(S102)、画像の修正等の画像処理を施すとともに、基準撮影画像の画素毎に輝度を測定する。次に、標識探索部21により、基準撮影画像から複数の標識80を判別して各位置を検索し(S103)、各標識80について、その撮影画像から一対の円形標示81の部分(ぼやけた輪郭部分を含む)を判別して、サブピクセル処理を順に行う(S104)。サブピクセル処理時には、座標算出部21Bにより、円形標示81を構成する画素の位置座標に各画素の輝度情報の重みを付けて、上記のように円形標示81の中心Cの座標を算出する。
【0037】
標識探索部21は、このようにして、標識80に設けた一対の円形標示81の各中心Cを基準撮影画像から検出した後、中心C間の中点位置M(基準中点位置M1)(ここでは座標)を算出して求める(S105)。また、標識探索部21は、一対の円形標示81の撮影画像上の中心間距離(ここでは画素数)を求め、中心間距離と、一対の円形標示81の実空間の中心間距離から、変位量算出部21Cにより、上記した換算係数を算出する(S106)。その後、中心C間の基準中点位置M1を標識80の基準位置として測定用データ領域32に記憶するとともに、換算係数も測定用データ領域32に記憶する(S107)。画像処理装置10は、標識探索部21により、以上の処理を標識80の数だけ繰り返し(S108、NO)、複数の標識80の全ての処理が終了したときに(S108、YES)、初期設定を終了して変位量の測定開始まで待機する。
【0038】
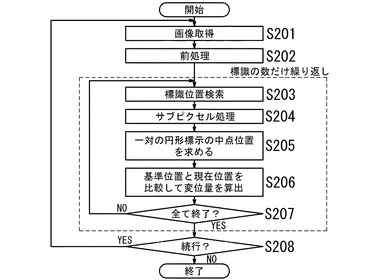
図8は、変位量測定装置1による変位量測定の手順を示すフローチャートである。
変位量測定装置1は、図示のように、変位量の測定開始に伴い、まず、カメラ2により、基準撮影画像と同じカメラアングルで橋Bを撮影し、複数の標識80が撮影された撮影画像を取得して(S201)、取得画像領域31に記憶する。また、取得した現在の撮影画像に対して前処理を行い(S202)、画像の修正等の画像処理を施すとともに、撮影画像の画素毎に輝度を測定する。次に、基準撮影画像と同様に、撮影画像から複数の標識80を判別して各位置を検索し(S203)、各標識80について、その撮影画像から一対の円形標示81の部分を判別して、サブピクセル処理を順に行う(S204)。これにより、円形標示81の中心Cの座標を算出して、標識80に設けた一対の円形標示81の各中心Cを撮影画像から検出し、中心C間の中点位置M2を算出して求める(S205)。
【0039】
続いて、この中点位置M2を標識80の現在位置として、測定用データ領域32に記憶された同じ標識80の基準位置と比較して、標識80の変位量を算出する(S206)。具体的には、変位量算出部21Cにより、撮影画像から算出された中点位置M2と、上記のように予め取得した標識80の基準撮影画像に基づく基準中点位置M1とを比較する。また、中点位置M1、M2の比較結果に基づき、基準中点位置M1に対する算出された中点位置M1の撮影画像上の変位量を算出し、測定用データ領域32から、測定対象の標識80の換算係数を取得する。次に、これら変位量と換算係数とを掛け合わせることで、算出された変位量を換算係数に基づき実空間の変位量に換算する。
【0040】
このように、画像処理装置10は、変位量算出部21Cにより、中点位置M1、M2の比較結果と、一対の円形標示81の中心間距離(ここでは、中心間距離から算出した換算係数)に基づき、標識80の変位量を算出する。続いて、画像処理装置10は、以上の処理を標識80の数だけ繰り返し(S207、NO)、複数の標識80の全ての処理が終了したときに(S207、YES)、変位量の測定処理を続行するか否かを判断する。その結果、処理を続行するときは(S208、YES)、所定時間後に撮影した次の撮影画像を取得して各標識80の変位量を順次測定し、処理を続行しないときは(S208、NO)、変位量の測定を終了する。
【0041】
ここで、上記のように、円形標示81の直径や面積は、標識80に対するピントによっては、撮影画像で円形標示81がぼやけて不鮮明になり、その輪郭が正しく認識できずに、正確に検出や算出するのが困難になることがある。これに対し、円形標示81の中心Cは、円形標示81の輪郭がぼやけたときでも、撮影画像から比較的正確に検出でき、標識80に対するピントの状態に関わらず精度よく特定できる。そこで、この変位量測定装置1では、円形標示81の直径や面積ではなく、標識80に設けた一対の円形標示81の中心Cを撮影画像から検出し、両中心Cを使用して標識80の変位量を測定している。
【0042】
その際、本実施形態では、標識80の各撮影画像から両中心C間の中点位置M1、M2を算出して比較し、かつ、両中心Cから中心間距離を求めて、比較結果と中心間距離に基づき標識80の変位量を算出する。このように、正確に検出可能な中心Cに基づいて変位量を算出するため、中心Cの検出精度に応じて、標識80の実空間の変位量を精度よく測定できる。また、中点位置M1、M2を比較するときに、標識80の正確に対応する位置同士を比較できるため、標識80の撮影画像上の変位量を正確に算出する等して、比較結果に基づく変位量の算出精度を向上できる。更に、両中心Cから、一対の円形標示81の撮影画像上の中心距離も精度よく求められ、中心間距離から正確な変位量の変換係数も算出できるため、標識80の撮影画像上の変位量を実空間の変位量に精度よく換算できる。
【0043】
従って、本実施形態によれば、撮影画像に基づき標識80の変位量を測定するときに、標識80に対するピントに関わらず変位量を正確に測定でき、変位量の測定精度を向上させることができる。これに伴い、種々の設置状況や撮影条件で標識80の変位量を正確に測定でき、変位量の測定精度の変動を抑制できる。また、複数の標識80を設置したときに、カメラの被写界深度の影響でピントがずれた標識80が生じても、そのような標識80の変位量を、ピントが合う標識80の変位量と同程度の精度で測定できる。その結果、変位量測定装置1の利用範囲や分野を広げて、変位量測定装置1を様々な用途に活用できる。
【0044】
なお、ここでは、図形標示81の形状として円形を例に説明したが、図形標示81は、正多角形(例えば八角形や十角形等)や楕円形等、中心Cが特定可能な円形以外の形状の標示であってもよい。ただし、図形標示81を円形標示にすると、対称性が高く中心Cの特定も容易であり、中心Cの検出精度も高くなるため、図形標示81には円形標示を使用するのが、より望ましい。また、図形標示81の中心Cは、撮影画像における図形標示81の大きさや画像の状態等によっては、上記したサブピクセル処理以外の処理により検出するようにしてもよい。
【符号の説明】
【0045】
1・・・変位量測定装置、2・・・カメラ、3・・・入力装置、10・・・画像処理装置、11・・・インタフェース、20・・・CPU、21・・・標識探索部、21A・・・前処理部、21B・・・座標算出部、21C・・・変位量算出部、30・・・RAM、31・・・取得画像領域、32・・・測定用データ領域、32A・・・基準位置、32B・・・換算係数、32C・・・各種閾値、33・・・各種設定値領域、80・・・標識、81・・・図形(円形)標示、B・・・橋、C・・・中心、M・・・中点位置。
【技術分野】
【0001】
本発明は、測定対象を撮影した撮影画像に基づき、測定対象の変位量を測定する変位量測定装置及び変位量測定方法に関する。
【背景技術】
【0002】
従来、特定の測定対象を撮影して撮影画像を画像処理し、測定対象の動きや変位を測定することが行われている。この画像による測定では、他の方式の測定に比べて、広範囲に亘る、かつ、複数の測定対象の変位量を一度に測定できる。また、このような変位量を測定する装置として、複数の固定カメラで撮影した画像を用いて、3次元的に変位量を求める装置が知られている(特許文献1参照)。
【0003】
ところで、従来から、1つのカメラで撮影した測定対象の画像により、測定対象の変位量を2次元的に求める変位量測定装置も使用されている。この変位量測定装置では、測定対象の撮影画像上における変位量を実際の3次元空間(実空間)の変位量に換算するため、測定対象の変位量の測定精度は、撮影画像上における変位量測定と換算の精度に直結して各精度に左右される。これに対し、例えば、測定対象として大きさが既知の標識を使用し、変位量を把握したい場所や物に標識を取り付けて、その撮影画像から標識を判別等することで、充分な変位量の測定精度を確保できる。
【0004】
図9は、標識を使用した変位量の測定例を説明するための模式図であり、図9Aは標識の正面図、図9B、Cは標識の撮影画像を画素を表す升目とともに示す図である。
この標識90(図9A参照)には、矩形状の表面(撮影面)の中央部に、周辺の黒色部を背景にして、白色からなる所定径(ここでは直径30mm)の円形標示91が設けられている。
【0005】
変位量の測定時には、予め標識90の初期画像(図9B参照)を撮影し、この画像を基準撮影画像として所定時間(期間)後の標識90の撮影画像(図9C参照)と比較し、標識90の変位量を画像上で測定する。その際、撮影画像から円形標示91の直径(画素数)を検出し、実際の直径と画素数から、撮影画像の1画素と実空間の距離との対応関係を算出する。ここでは、円形標示91の直径(30mm)が撮影画像では3画素であるため、直径を画素数で割ることで1画素に対応する距離(30mm÷3画素=10mm/画素)が算出される。これより、撮影画像上の変位量を実空間の変位量に換算するための換算係数(10mm/画素)を取得する。また、基準撮影画像に対して所定時間後の撮影画像では、円形標示91の中心が下方に2画素分変位しており、この変位量と換算係数とを掛けて、実空間での標識90の変位量(10mm/画素×2画素=20mm)が算出される。
【0006】
このように、標識90を使用すると、撮影画像から測定対象を正確に認識できる。また、直径が既知の円形標示91の画像に基づき、撮影画像上の変位量の測定と換算係数の算出とを行うことで、それらの各精度、及び、実空間における変位量の測定精度を向上できる。しかしながら、この場合には、カメラの撮影領域内に複数の標識90を設置すると、設置状況によっては、カメラの被写界深度により、一部の標識90にのみピントが合い、他の標識90に対するピントがずれることがある。その結果、標識90がぼけて撮影されて、撮影画像で円形標示91が不鮮明になり、変位量の測定精度に影響が生じる虞がある。
【0007】
図10は、ピントがずれた標識90の画像例を示す図である。
標識90は、ピントが合わずに撮影されると、円形標示91(図10A参照)の輪郭がぼやけて識別し難くなり、正しい直径を検出するのが困難になる。即ち、撮影画像によっては、正しく認識(図10B参照)されたときの円形標示91の輪郭Rに比べて、輪郭Rが小さく(図10C参照)、又は、大きく(図10D参照)認識されて、円形標示91の直径の検出精度が低下することがある。
【0008】
図11は、円形標示91が小さく認識されたときの変位量の測定例を説明するための模式図である。
この場合には、標識90の基準撮影画像(図11A参照)と所定時間後の撮影画像(図11B参照)を比較して、円形標示91の中心の変位量は2画素であると判別される。ただし、円形標示91は、輪郭Rが小さく認識されて、直径が正しい直径(3画素)よりも小さい2.5画素として検出され、変位量の換算係数がより大きく算出(30mm÷2.5画素=12mm/画素)される。その結果、実空間における標識90の変位量(12mm/画素×2画素=24mm)は、実際の変位量(20mm)よりも大きな値に換算される。
【0009】
以上のように、この標識90では、標識90の設置状況や撮影条件によっては、撮影画像から円形標示91の輪郭Rを正しく認識できずに、円形標示91の直径と変位量の換算係数の精度が変動して、正確に変位量を測定するのが難しくなる虞がある。従って、標識90に対するピントに関わらず、測定対象の変位量を正確に測定して一層の精度向上を図る観点から、更なる改良の余地がある。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2004−77377号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、このような問題に鑑みなされたものであって、その目的は、撮影画像に基づき測定対象の変位量を測定するときに、測定対象に対するピントに関わらず変位量を正確に測定し、変位量の測定精度を向上させることである。
【課題を解決するための手段】
【0012】
本発明は、測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定装置であって、測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する手段と、一対の図形標示の撮影画像上の中心間距離を求める手段と、一対の図形標示の中心間の中点位置を算出する手段と、算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する手段と、中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する手段と、を備えたことを特徴とする。
また、本発明は、測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定方法であって、測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する工程と、一対の図形標示の撮影画像上の中心間距離を求める工程と、一対の図形標示の中心間の中点位置を算出する工程と、算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する工程と、中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する工程と、を有することを特徴とする。
【発明の効果】
【0013】
本発明によれば、撮影画像に基づき測定対象の変位量を測定するときに、測定対象に対するピントに関わらず変位量を正確に測定でき、変位量の測定精度を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本実施形態の変位量測定装置の概略構成を模式的に示す斜視図である。
【図2】図1のカメラによる撮影画像を示す図である。
【図3】本実施形態の標識の変位量の測定について説明するための模式図である。
【図4】画素の輝度情報を利用して円形標示の中心を算出する原理を説明する図である。
【図5】ピントがずれた標識の変位量の測定について説明するための模式図である。
【図6】本実施形態の変位量測定装置の概略構成を示す機能ブロック図である。
【図7】本実施形態の変位量測定装置による初期設定の手順を示すフローチャートである。
【図8】本実施形態の変位量測定装置による変位量測定の手順を示すフローチャートである。
【図9】標識を使用した変位量の測定例を説明するための模式図である。
【図10】ピントがずれた標識の画像例を示す図である。
【図11】円形標示が小さく認識されたときの変位量の測定例を説明するための模式図である。
【発明を実施するための形態】
【0015】
以下、本発明の変位量測定装置と変位量測定方法の一実施形態について、図面を参照して説明する。
本実施形態の変位量測定装置及び測定方法は、1つのカメラにより変位量の測定対象を撮影し、測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定装置、及び、この変位量測定装置における変位量測定方法である。以下では、測定対象として所定の標示を有する標識を使用し、複数の標識を、それぞれ変位量を把握したい場所や物等の対象物に貼り付けや固定、又は描く等して設け、それらを同時に撮影する場合を例に採り説明する。
【0016】
図1は、本実施形態の変位量測定装置の概略構成を模式的に示す斜視図である。
変位量測定装置1は、図示のように、標識80の撮影装置であるカメラ2と、カメラ2による撮影画像を処理する画像処理装置10とを備えている。カメラ2は、変位量を測定したい領域(ここでは橋B)に向けて、その全体が撮影範囲内に入るように設置され、橋Bを含む領域を撮影して、撮影画像を有線又は無線で接続された画像処理装置10に出力する。また、ここでは、標識80は、予め、橋Bの上面の両側部に沿って所定間隔で複数配置され、それぞれ標示81が設けられた撮影面をカメラ2の方向に向けて設置される。
【0017】
図2は、図1のカメラ2による撮影画像を示す図である。
カメラ2で撮影すると、図示のように、橋Bとともに、複数の標識80がカメラ2からの距離に応じた大きさで各位置に撮影される。この変位量測定装置1では、予め撮影した標識80の基準となる撮影画像を基準撮影画像(初期画像)とし、所定時間(期間)後に撮影された画像を基準撮影画像と比較する。これにより、基準撮影画像における標識80の基準(初期)位置に対して、比較する撮影画像における標識80の位置がどれだけ動いたかを検出し、各標識80及び、その設置位置の橋Bの変位量を画像上で測定する。
【0018】
図3は、標識80の変位量の測定について説明するための模式図であり、図3Aは標識80の正面図、図3Bは、1つの標識80を含む範囲を抜き出して画素を表す升目とともに示す基準撮影画像である。また、図3Cは、基準撮影画像の撮影から所定時間が経過した現在の撮影画像であり、図3Bと同じ標識80を図3Bと同じ範囲の画像で示している。
標識80(図3A参照)には、矩形状の撮影面に、周辺の黒色部を背景にして、白色からなる一対の図形標示81が互いに離間して設けられている。一対の図形標示81は、円形や正多角形等の中心Cが特定可能な標示であり、互いの中心C間の距離(中心間距離)が所定距離に設定されている。ここでは、一対の図形標示81は同じ所定径の円形標示81からなり、直径が30mm、中心間距離が50mmに設定され、標識80の幅方向の中央部に上下に並べて設けられている。
【0019】
本実施形態では、一対の円形標示81の中間点を標識80の位置とし、各撮影画像の対応する標識80同士を比較して、その位置の変化から変位量を測定する。そのため、撮影画像から標識80を判別して、一対の円形標示81の各中心Cを検出し、中心C同士を結んだ線上の中点を求めて、検出された中心C間の撮影画像上における中点位置M(図では、黒色の標識80中に仮想的に白い×印で示しており、×印の中央の交点が中点位置Mである)を算出する。このように算出される基準撮影画像(図3B参照)の基準中点位置M1と、所定時間後の撮影画像(図3C参照)の中点位置M2とを比較し、それらの差から、中点位置M2(標識80)の撮影画像上の変位量を取得する。ここでは、所定時間後の中点位置M2は、基準中点位置M1に対して下方に2画素分変位しており、変位量は2画素になっている。
【0020】
また、一対の中心C間の撮影画像上における間隔(画素数)を検出して、撮影画像から一対の円形標示81の中心間距離を求め、この中心間距離を表す画素数と実際の中心間距離から、撮影画像の1画素と実空間の距離との対応関係を算出する。ここでは、一対の円形標示81の中心間距離(50mm)が撮影画像では5画素であるため、中心間距離を画素数で割ることで1画素に対応する距離(50mm÷5画素=10mm/画素)が算出される。これより、中点位置M2の撮影画像上の変位量を実空間の変位量に換算するための換算係数(10mm/画素)を取得する。この換算係数と中点位置M2の変位量とを掛けて、撮影画像上の中点位置M2の変位量を実空間での変位量(10mm/画素×2画素=20mm)に換算し、実空間での標識80の変位量を20mmと測定する。
【0021】
ここで、本実施形態では、標識80の撮影画像に基づき、画像を構成する各画素の輝度情報を加味して円形標示81の中心Cを算出し、中心間距離と中点位置M2の変位量を画素単位未満で正確に算出する。
図4は、画素の輝度情報を利用して円形標示81の中心Cを算出する原理を説明する図であり、図3よりも大きく撮影された標識80の1つの円形標示81を含む上側部分を抜き出して、その付近の撮影画像を模式的に示している。また、図4Aは、標識80と円形標示81の輪郭が画素を示す升目に一致した状態を示し、図4Bは、図4Aの標識80が変位して各輪郭が升目の上に懸かった状態を示している。
【0022】
円形標示81(図4A参照)の中心Cの付近にXY座標の原点を設けて、横方向のX軸と縦方向のY軸を、それぞれ画素内を通るように設定すると、円形標示81内の各画素の位置がXY座標により(x、y)で表される。その際、各画素の座標は、原点で両座標が0であり、各座標軸に沿って画素を単位に−2、−1、0、1、2等となる。また、各座標の画素の輝度値を、白を1、黒を0として、0〜1に正規化された値Wで表すと、円形標示81の中心Cは、XY座標や値Wを基に、次の計算式(数1)により座標が算出される。
【0023】
【数1】
【0024】
ここでは、中心Cの座標が(0.5、0.5)となる図4Aに示す円形標示81に対し、標識80が0.3画素下方に変位した図4Bに示す円形標示81の中心Cについて、具体的に座標を算出する例を説明する。なお、標識80の変位に伴い、標識80と円形標示81の輪郭部分は、一部が画素内に位置することになり、その画素内における割合に応じて、輪郭部分の画素が白と黒の間の色(灰色)となって現れ、各輝度値が0〜1の間の値Wになる。図4Bでは、輪郭部分の割合が少なく、白側の色の画素(W=0.7)に複数の点を付し、輪郭部分の割合が多く、黒側の色の画素(W=0.3)に斜線でハッチングを付して、それぞれ白色の画素(W=1)と区別して示す。図4Bに示す円形標示81を計算式(数1)に適用すると、中心Cの座標は次の(数2)に示すように算出される。
【0025】
【数2】
【0026】
その結果、図4Bに示す円形標示81の中心座標は(0.5、0.2)であり、図4Aに示す円形標示81の中心座標(0.5、0.5)に対して、Y軸方向に−0.3画素(下方へ0.3画素)の変位となり、正しい結果が得られている。
【0027】
このように、本実施形態では、円形標示81の撮影画像から画像を構成する画素の輝度を測定し、画素の位置座標に各画素の測定した輝度情報の重みを付けて、円形標示81の画像の位置座標上での中心位置(座標)を算出(以下、サブピクセル処理という)する。このサブピクセル処理を一対の円形標示81に対して行い、標識80に設けられた一対の円形標示81の中心Cをそれぞれ検出する。また、これら中心Cの位置や座標に基づき、一対の円形標示81の撮影画像上の中心間距離と、両中心C間の撮影画像上における中点位置Mを算出する。これにより、撮影画像(図3参照)に基づき、中心間距離と中点位置Mを画素単位未満で正確に求めて、精度の高い中点位置M2の変位量と、その実空間の変位量への換算係数を上記のように取得し、実空間での標識80の変位量を精度よく測定する。
【0028】
変位量測定装置1は、カメラ2による撮影画像(図2参照)に基づき、画像処理装置10(図1参照)により画像処理して、複数の標識80を判別し、各円形標示81の中心位置を算出して一対の中心Cを検出し、それぞれの標識80の変位量を測定する。また、この変位量測定装置1は、一部又は全部の標識80に対するピントが合わずに、標識80がぼけて撮影され、円形標示81が不鮮明(図10参照)になったときでも、ピントが合う標識80に対してと同様に変位量を測定する。即ち、変位量測定装置1は、ピントに関わらず、円形標示81が撮影された部分の画素の輝度情報に基づき、上記したサブピクセル処理により円形標示81の中心位置を算出する。その際、撮影画像で円形標示81の輪郭がぼやけて正しく認識できない状態でも、円形標示81のぼやけた部分を含む各画素の輝度を取得し、輝度を重みにして中心位置を算出する。これにより、一対の円形標示81の中心Cを正確に検出する。
【0029】
図5は、ピントがずれた標識80の変位量の測定について説明するための模式図であり、図5Aは、1つの標識80を含む範囲を抜き出して画素を表す升目とともに示す基準撮影画像である。また、図5Bは、基準撮影画像の撮影から所定時間が経過した撮影画像であり、図5Aと同じ標識80を図5Aと同じ範囲の画像で示している。
【0030】
変位量測定装置1は、画像処理装置10により、各撮影画像に基づきサブピクセル処理を行い、標識80に設けられた円形標示81内で中心位置を算出し、図示のように、一対の円形標示81の各中心Cを検出する。この検出した中心Cの位置(座標)から中心C間の中点位置Mを算出し、基準撮影画像(図5A参照)の基準中点位置M1と、所定時間後の撮影画像(図5B参照)の中点位置M2とを比較し、中点位置M2(標識80)の変位量を取得する。ここでは、撮影画像上で、基準中点位置M1に対して、中点位置M2が下方に2画素分変位しており、所定時間後の中点位置M2の変位量は2画素であると判定される。
【0031】
また、中心Cの各位置から、一対の円形標示81の撮影画像上における中心間距離を求めて、この中心間距離を表す画素数と実際の中心間距離から、上記した換算係数を算出する。ここでは、一対の円形標示81の中心間距離(50mm)が撮影画像では5画素であり、これらから、1画素に対応する距離である換算係数(50mm÷5画素=10mm/画素)が算出される。この換算係数により中点位置M2の撮影画像上の変位量を換算して、実空間での中点位置M2の変位量を算出(10mm/画素×2画素=20mm)する。このように、ピントが合っていない標識80に対しても、円形標示81の輪郭によらずに、一対の円形標示81の中心Cを正確に検出して、標識80の変位量を精度よく測定する。
【0032】
図6は、以上説明した変位量測定装置1の概略構成を示す機能ブロック図である。
変位量測定装置1は、図示のように、カメラ2と画像処理装置10に加えて、画像処理装置10の操作に使用し、変位量測定に関する設定や条件等を入力する入力装置3と、画像や情報を表示する表示装置(図示せず)とを備えている。カメラ2は、画像を撮影するデジタルカメラやデジタルビデオカメラ等からなり、画像処理装置10により制御されて、橋Bとともに複数の標識80を所定の間隔やタイミングで撮影し、撮影画像を電気信号に変換等して画像データを画像処理装置10へ出力する。
【0033】
画像処理装置10は、全体を制御するCPU(Central Processing Unit)20、CPU20がアクセスするデータを一時的に記憶するRAM(Random Access Memory)30、及び制御や各処理のためのプログラムを格納するROM(Read Only Memory)(図示せず)等を備えたコンピュータから構成されている。また、画像処理装置10は、カメラ2及び入力装置3と接続するためのインタフェース11を備え、インタフェース11を介して、画像データや入力信号を含む各種データを送受信する。画像処理装置10は、CPU20で所定のプログラムを実行することで、カメラ2から取得する撮影画像を画像処理等して、変位量測定に関する上記した各処理を行う。そのため、画像処理装置10は、CPU20による機能実現手段として、標識探索部21と、標識探索部21の一部の機能を担う前処理部21A、座標算出部21B、及び変位量算出部21Cとを有する。
【0034】
RAM30には、カメラ2から取得する画像を記憶する取得画像領域31と、変位量の測定に関する基準データや途中データを記憶する測定用データ領域32と、変位量の測定等に必要な各種設定値を記憶する各種設定値領域33とが設けられている。また、測定用データ領域32には、各標識80の変位量測定の基準となる基準位置32A(例えば、最初に取得した初期位置)と、撮影画像上の変位量を実空間の変位量に換算するための換算係数32Bと、画像処理や変位量の測定時に使用する各種閾値32Cが記憶されている。なお、各種閾値32Cとしては、例えば、撮影画像から標識80を判別する閾値や、標識80から一対の円形標示81を判別する閾値、或いは、標識80の変位量の測定値と比較して変位の有無や変位の上限値を越えた否かを判定するための変位量の閾値が記憶される。
【0035】
次に、本実施形態の変位量測定装置1により、測定対象である標識80の変位量を測定する処理や手順の流れについて説明する。
図7は、変位量測定装置1による初期設定の手順を示すフローチャートである。
この変位量測定装置1では、標識80の変位量の測定開始前に、変位量の測定に必要なデータを予め取得して測定のための初期設定を行う。初期設定開始に伴い、図示のように、まず、カメラ2により、複数の標識80が設置された橋Bを撮影し、変位量測定の基準となる基準位置の標識80が撮影された基準撮影画像を取得して(S101)、取得画像領域31に記憶する。
【0036】
また、前処理部21Aにより基準撮影画像に対して前処理を行い(S102)、画像の修正等の画像処理を施すとともに、基準撮影画像の画素毎に輝度を測定する。次に、標識探索部21により、基準撮影画像から複数の標識80を判別して各位置を検索し(S103)、各標識80について、その撮影画像から一対の円形標示81の部分(ぼやけた輪郭部分を含む)を判別して、サブピクセル処理を順に行う(S104)。サブピクセル処理時には、座標算出部21Bにより、円形標示81を構成する画素の位置座標に各画素の輝度情報の重みを付けて、上記のように円形標示81の中心Cの座標を算出する。
【0037】
標識探索部21は、このようにして、標識80に設けた一対の円形標示81の各中心Cを基準撮影画像から検出した後、中心C間の中点位置M(基準中点位置M1)(ここでは座標)を算出して求める(S105)。また、標識探索部21は、一対の円形標示81の撮影画像上の中心間距離(ここでは画素数)を求め、中心間距離と、一対の円形標示81の実空間の中心間距離から、変位量算出部21Cにより、上記した換算係数を算出する(S106)。その後、中心C間の基準中点位置M1を標識80の基準位置として測定用データ領域32に記憶するとともに、換算係数も測定用データ領域32に記憶する(S107)。画像処理装置10は、標識探索部21により、以上の処理を標識80の数だけ繰り返し(S108、NO)、複数の標識80の全ての処理が終了したときに(S108、YES)、初期設定を終了して変位量の測定開始まで待機する。
【0038】
図8は、変位量測定装置1による変位量測定の手順を示すフローチャートである。
変位量測定装置1は、図示のように、変位量の測定開始に伴い、まず、カメラ2により、基準撮影画像と同じカメラアングルで橋Bを撮影し、複数の標識80が撮影された撮影画像を取得して(S201)、取得画像領域31に記憶する。また、取得した現在の撮影画像に対して前処理を行い(S202)、画像の修正等の画像処理を施すとともに、撮影画像の画素毎に輝度を測定する。次に、基準撮影画像と同様に、撮影画像から複数の標識80を判別して各位置を検索し(S203)、各標識80について、その撮影画像から一対の円形標示81の部分を判別して、サブピクセル処理を順に行う(S204)。これにより、円形標示81の中心Cの座標を算出して、標識80に設けた一対の円形標示81の各中心Cを撮影画像から検出し、中心C間の中点位置M2を算出して求める(S205)。
【0039】
続いて、この中点位置M2を標識80の現在位置として、測定用データ領域32に記憶された同じ標識80の基準位置と比較して、標識80の変位量を算出する(S206)。具体的には、変位量算出部21Cにより、撮影画像から算出された中点位置M2と、上記のように予め取得した標識80の基準撮影画像に基づく基準中点位置M1とを比較する。また、中点位置M1、M2の比較結果に基づき、基準中点位置M1に対する算出された中点位置M1の撮影画像上の変位量を算出し、測定用データ領域32から、測定対象の標識80の換算係数を取得する。次に、これら変位量と換算係数とを掛け合わせることで、算出された変位量を換算係数に基づき実空間の変位量に換算する。
【0040】
このように、画像処理装置10は、変位量算出部21Cにより、中点位置M1、M2の比較結果と、一対の円形標示81の中心間距離(ここでは、中心間距離から算出した換算係数)に基づき、標識80の変位量を算出する。続いて、画像処理装置10は、以上の処理を標識80の数だけ繰り返し(S207、NO)、複数の標識80の全ての処理が終了したときに(S207、YES)、変位量の測定処理を続行するか否かを判断する。その結果、処理を続行するときは(S208、YES)、所定時間後に撮影した次の撮影画像を取得して各標識80の変位量を順次測定し、処理を続行しないときは(S208、NO)、変位量の測定を終了する。
【0041】
ここで、上記のように、円形標示81の直径や面積は、標識80に対するピントによっては、撮影画像で円形標示81がぼやけて不鮮明になり、その輪郭が正しく認識できずに、正確に検出や算出するのが困難になることがある。これに対し、円形標示81の中心Cは、円形標示81の輪郭がぼやけたときでも、撮影画像から比較的正確に検出でき、標識80に対するピントの状態に関わらず精度よく特定できる。そこで、この変位量測定装置1では、円形標示81の直径や面積ではなく、標識80に設けた一対の円形標示81の中心Cを撮影画像から検出し、両中心Cを使用して標識80の変位量を測定している。
【0042】
その際、本実施形態では、標識80の各撮影画像から両中心C間の中点位置M1、M2を算出して比較し、かつ、両中心Cから中心間距離を求めて、比較結果と中心間距離に基づき標識80の変位量を算出する。このように、正確に検出可能な中心Cに基づいて変位量を算出するため、中心Cの検出精度に応じて、標識80の実空間の変位量を精度よく測定できる。また、中点位置M1、M2を比較するときに、標識80の正確に対応する位置同士を比較できるため、標識80の撮影画像上の変位量を正確に算出する等して、比較結果に基づく変位量の算出精度を向上できる。更に、両中心Cから、一対の円形標示81の撮影画像上の中心距離も精度よく求められ、中心間距離から正確な変位量の変換係数も算出できるため、標識80の撮影画像上の変位量を実空間の変位量に精度よく換算できる。
【0043】
従って、本実施形態によれば、撮影画像に基づき標識80の変位量を測定するときに、標識80に対するピントに関わらず変位量を正確に測定でき、変位量の測定精度を向上させることができる。これに伴い、種々の設置状況や撮影条件で標識80の変位量を正確に測定でき、変位量の測定精度の変動を抑制できる。また、複数の標識80を設置したときに、カメラの被写界深度の影響でピントがずれた標識80が生じても、そのような標識80の変位量を、ピントが合う標識80の変位量と同程度の精度で測定できる。その結果、変位量測定装置1の利用範囲や分野を広げて、変位量測定装置1を様々な用途に活用できる。
【0044】
なお、ここでは、図形標示81の形状として円形を例に説明したが、図形標示81は、正多角形(例えば八角形や十角形等)や楕円形等、中心Cが特定可能な円形以外の形状の標示であってもよい。ただし、図形標示81を円形標示にすると、対称性が高く中心Cの特定も容易であり、中心Cの検出精度も高くなるため、図形標示81には円形標示を使用するのが、より望ましい。また、図形標示81の中心Cは、撮影画像における図形標示81の大きさや画像の状態等によっては、上記したサブピクセル処理以外の処理により検出するようにしてもよい。
【符号の説明】
【0045】
1・・・変位量測定装置、2・・・カメラ、3・・・入力装置、10・・・画像処理装置、11・・・インタフェース、20・・・CPU、21・・・標識探索部、21A・・・前処理部、21B・・・座標算出部、21C・・・変位量算出部、30・・・RAM、31・・・取得画像領域、32・・・測定用データ領域、32A・・・基準位置、32B・・・換算係数、32C・・・各種閾値、33・・・各種設定値領域、80・・・標識、81・・・図形(円形)標示、B・・・橋、C・・・中心、M・・・中点位置。
【特許請求の範囲】
【請求項1】
測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定装置であって、
測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する手段と、
一対の図形標示の撮影画像上の中心間距離を求める手段と、
一対の図形標示の中心間の中点位置を算出する手段と、
算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する手段と、
中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する手段と、
を備えたことを特徴とする変位量測定装置。
【請求項2】
請求項1に記載された変位量測定装置において、
変位量を算出する手段が、一対の図形標示の撮影画像上の中心間距離と実空間の中心間距離から、中点位置の撮影画像上の変位量を実空間の変位量に換算する換算係数を算出する手段と、基準中点位置に対する算出された中点位置の撮影画像上の変位量を算出する手段と、算出された変位量を換算係数に基づき実空間の変位量に換算する手段と、を有することを特徴とする変位量測定装置。
【請求項3】
請求項1又は2に記載された変位量測定装置において、
測定対象の図形標示が円形標示であることを特徴とする変位量測定装置。
【請求項4】
測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定方法であって、
測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する工程と、
一対の図形標示の撮影画像上の中心間距離を求める工程と、
一対の図形標示の中心間の中点位置を算出する工程と、
算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する工程と、
中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する工程と、
を有することを特徴とする変位量測定方法。
【請求項5】
請求項4に記載された変位量測定方法において、
変位量を算出する工程が、一対の図形標示の撮影画像上の中心間距離と実空間の中心間距離から、中点位置の撮影画像上の変位量を実空間の変位量に換算する換算係数を算出する工程と、基準中点位置に対する算出された中点位置の撮影画像上の変位量を算出する工程と、算出された変位量を換算係数に基づき実空間の変位量に換算する工程と、を有することを特徴とする変位量測定方法。
【請求項1】
測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定装置であって、
測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する手段と、
一対の図形標示の撮影画像上の中心間距離を求める手段と、
一対の図形標示の中心間の中点位置を算出する手段と、
算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する手段と、
中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する手段と、
を備えたことを特徴とする変位量測定装置。
【請求項2】
請求項1に記載された変位量測定装置において、
変位量を算出する手段が、一対の図形標示の撮影画像上の中心間距離と実空間の中心間距離から、中点位置の撮影画像上の変位量を実空間の変位量に換算する換算係数を算出する手段と、基準中点位置に対する算出された中点位置の撮影画像上の変位量を算出する手段と、算出された変位量を換算係数に基づき実空間の変位量に換算する手段と、を有することを特徴とする変位量測定装置。
【請求項3】
請求項1又は2に記載された変位量測定装置において、
測定対象の図形標示が円形標示であることを特徴とする変位量測定装置。
【請求項4】
測定対象を撮影した撮影画像に基づき測定対象の変位量を測定する変位量測定方法であって、
測定対象に設けた中心が特定可能な一対の図形標示の各中心を撮影画像から検出する工程と、
一対の図形標示の撮影画像上の中心間距離を求める工程と、
一対の図形標示の中心間の中点位置を算出する工程と、
算出された中点位置と予め取得した測定対象の基準撮影画像に基づく基準中点位置とを比較する工程と、
中点位置の比較結果と中心間距離に基づき測定対象の変位量を算出する工程と、
を有することを特徴とする変位量測定方法。
【請求項5】
請求項4に記載された変位量測定方法において、
変位量を算出する工程が、一対の図形標示の撮影画像上の中心間距離と実空間の中心間距離から、中点位置の撮影画像上の変位量を実空間の変位量に換算する換算係数を算出する工程と、基準中点位置に対する算出された中点位置の撮影画像上の変位量を算出する工程と、算出された変位量を換算係数に基づき実空間の変位量に換算する工程と、を有することを特徴とする変位量測定方法。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−69797(P2011−69797A)
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願番号】特願2009−223206(P2009−223206)
【出願日】平成21年9月28日(2009.9.28)
【出願人】(304020498)サクサ株式会社 (678)
【出願人】(000166432)戸田建設株式会社 (328)
【Fターム(参考)】
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願日】平成21年9月28日(2009.9.28)
【出願人】(304020498)サクサ株式会社 (678)
【出願人】(000166432)戸田建設株式会社 (328)
【Fターム(参考)】
[ Back to top ]