
変倍光学系及びそれを用いた撮像装置
【課題】前玉有効径の比較的小さい高変倍光学系及びそれを用いた撮像装置を提供する。
【解決手段】物体側から順に、正の屈折力を有する第1レンズ群G1と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群G2と、シャッタ及び開口絞りSを有する変倍時に固定の正の屈折力を有する第3レンズ群G3と、正の屈折力を有する第4レンズ群G4と、負の屈折力を有する第5レンズ群G5とを有し、以下の条件式を満足する。−10<ft/f2<−7・・・(1)−1.8≦ft/ftg12≦−0.92・・・(2)ただし、ftは望遠端での全系の焦点距離、f2は第2レンズ群の焦点距離、ftg12は望遠端における第1レンズ群と第2レンズ群の合成焦点距離、である。
【解決手段】物体側から順に、正の屈折力を有する第1レンズ群G1と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群G2と、シャッタ及び開口絞りSを有する変倍時に固定の正の屈折力を有する第3レンズ群G3と、正の屈折力を有する第4レンズ群G4と、負の屈折力を有する第5レンズ群G5とを有し、以下の条件式を満足する。−10<ft/f2<−7・・・(1)−1.8≦ft/ftg12≦−0.92・・・(2)ただし、ftは望遠端での全系の焦点距離、f2は第2レンズ群の焦点距離、ftg12は望遠端における第1レンズ群と第2レンズ群の合成焦点距離、である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変倍光学系及びそれを用いた撮像装置に関し、特に、前玉有効径の比較的小さい高変倍光学系及びそれを用いた撮像装置に関するものである。
【背景技術】
【0002】
近年、デジタルスチルカメラのように電子撮像素子を用いた撮像装置が幅広く普及している。デジタルスチルカメラの発展と普及に伴い、高変倍で小型の光学系が求められている。
【0003】
高変倍の光学系においては、物体側から順に、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群を有し、第3レンズ群近傍に開口絞りを持つ光学系が以前から多く提案されている。この構成の場合、変倍のほとんどを第2レンズ群が光軸上を移動することによって行っている。
【0004】
特許文献1に記載のものでは、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群で構成され、開口絞りは、変倍時に移動する第2レンズ群と第3レンズ群の間で、変倍時に移動しない構成になっている。
【0005】
また、特許文献2に記載のものは、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群で構成され、第1レンズ群、第3レンズ群、第5レンズ群群が変倍時固定されており、開口絞りは第3レンズ群と一体で構成されている。
【0006】
特許文献3に記載のものは、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群、正の第6レンズ群で構成され、第1レンズ群、第4レンズ群、第6レンズ群が変倍時固定されている。開口絞りは第3レンズ群と一体となり、変倍時に移動している。
【特許文献1】特開平5−113538号公報
【特許文献2】特開平8−327904号公報
【特許文献3】特開2001−75008号公報
【特許文献4】特開平11−64714号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記何れの特許文献においても、第2レンズ群の倍率変化が全体の倍率変化の大部分を占めて高変倍を達成しており、開口絞りは第2レンズ群よりも撮像面側に配置されている。
【0008】
第2レンズ群が倍率変化のほとんどを負担する場合、変倍比を高める場合には、第2レンズ群の移動量を大きくするか、第2レンズ群の屈折力を高める必要がある。
【0009】
ところが、第2レンズ群の移動量が大きくなると、鏡枠機構が複雑又は大型化し、屈折力を高めると変倍による収差変動が大きくなり、光学性能の確保が難しくなってくる。また、入射瞳位置が光学系の奥になってしまい、第1レンズ群の有効径が大きくなるため、高変倍化と小型の両立が難しく、有効径が大きくなるにつれて重量が増えることから、駆動機構自体の強度を高める必要があり、大型化、複雑化につながる。
【0010】
しかし、開口絞りよりも撮像面側で変倍の負担を大きくすると、射出瞳位置の変動が大きくなることから電子撮像素子では受光効率が悪化するため、開口絞りより後方での変倍負担を高めることは好ましくない。
【0011】
本発明は従来技術のこのような状況に鑑みてなされたものであり、その目的は、前玉有効径の比較的小さい高変倍光学系及びそれを用いた撮像装置を提供することである。
【課題を解決するための手段】
【0012】
上記目的を達成する本発明の変倍光学系は、物体側から順に、正の屈折力を有する第1レンズ群と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群と、シャッタ及び開口絞りを有する変倍時に固定の正の屈折力を有する第3レンズ群と、正の屈折力を有する第4レンズ群と、負の屈折力を有する第5レンズ群とを有し、以下の条件式を満足することを特徴とするものである。
【0013】
−10<ft /f2 <−7 ・・・(1)
−1.8≦ft /ftg12≦−0.92 ・・・(2)
ただし、ft は望遠端での全系の焦点距離、
f2 は第2レンズ群の焦点距離、
ftg12は望遠端における第1レンズ群と第2レンズ群の合成焦点距離、
である。
【0014】
以下、本発明において上記構成をとる理由と作用を説明する。
【0015】
以上の変倍光学系のように、物体側から順に、正の屈折力を有する第1レンズ群と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群と、シャッタ及び開口絞りを有する変倍時に固定の正の屈折力を有する第3レンズ群と、正の屈折力を有する第4レンズ群、負の屈折力を有する第5レンズ群とを有する構成とすることで、前玉有効径の比較的小さい高変倍光学系を得ることができる。
【0016】
条件式(1)は、最も大きな変倍効果を有する第2レンズ群の焦点距離に関する条件式であり、その上限の−7を上回ると、第2レンズ群の移動量が大きくなるため、鏡枠が大きくなるか、又は複雑になり、下限の−10を下回ると、第2レンズ群の変倍負担が大きくなるため、第2レンズ群の偏心による望遠側での像面の倒れが大きくなる。
【0017】
条件式(2)は、望遠端における第1レンズ群と第2レンズ群の合成焦点距離に関する条件式であり、その上限の−0.92を上回ると、第2レンズ群の変倍負担が大きく、望遠側の球面収差と広角側の軸外収差の両立が難しくなり、また、前玉径が大きく、重くなるなるため、変倍のための駆動機構の負担が大きくなる。また、下限の−1.8を下回ると、望遠側での全長が長くなり、小型化が難しくなる。
【0018】
この場合に、正の屈折力を有する第3レンズ群の撮像面側に光軸を略直角に屈曲させる反射部材を有することが望ましい。
【0019】
このように構成して、第3レンズ群の撮像面側で光軸を折り曲げることにより、鏡筒の繰り出し機構を簡略化することができ、また、沈胴して収納時の厚みを抑えることができる。
【0020】
また、前記反射部材は表面反射ミラーからなることが望ましい。
【0021】
すなわち、反射部材として表面反射ミラーを用いることで、重量を抑えて保持機構を簡素にすることが可能である。
【0022】
本発明は、以上の変倍光学系と、その変倍光学系の像側に配され、光学像を電気信号に変換する撮像素子とを備えた撮像装置を含むものである。
【0023】
この場合に、前記変倍光学系と前記撮像素子との間にローパスフィルターを配置することが望ましい。
【発明の効果】
【0024】
以上の本発明によると、前玉有効径の比較的小さい高変倍光学系とそれを用いた撮像装置を得ることができる。本発明の変倍光学系は、特に薄く小型に収納可能な屈曲変倍光学系に最適なものである。
【発明を実施するための最良の形態】
【0025】
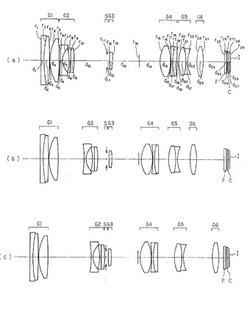
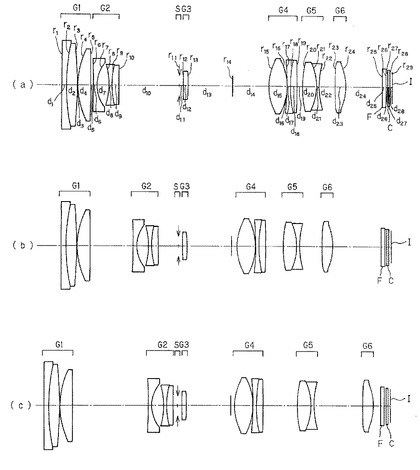
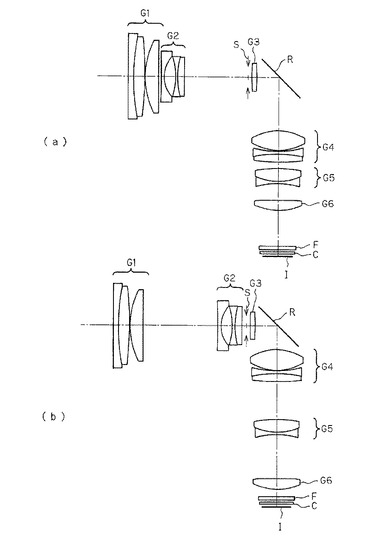
以下、本発明の変倍光学系の実施例1〜6について説明する。実施例1〜6の変倍光学系の光路を展開した無限遠物点合焦時の広角端(a)、中間状態(b)、望遠端(c)でのレンズ断面図をそれぞれ図1〜図6に示す。各図中、第1レンズ群はG1、第2レンズ群はG2、開口絞りはS、第3レンズ群はG3、第4レンズ群はG4、第5レンズ群はG5、第6レンズ群はG6、光学的ローパスフィルターはF、電子撮像素子であるCCDのカバーガラスはC、CCDの像面はIで示してある。なお、近赤外シャープカットコートについては、例えば光学的ローパスフィルターFに直接コートを施こしてもよく、また、別に赤外カット吸収フィルターを配置してもよく、あるいは、透明平板の入射面に近赤外シャープカットコートしたものを用いてもよい。
【0026】
実施例1の屈曲変倍光学系は、図1に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は物体側に移動し、第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より若干物体側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0027】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、像側に凸面を向けた負メニスカスレンズと像側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0028】
非球面は、第1レンズ群G1の単レンズの両凸正レンズの両面、第2レンズ群G2の両凹負レンズの像側の面、第4レンズ群G4の単レンズの両凸正レンズの両面、第6レンズ群G6の両凸正レンズの像側の面の6面に用いている。
【0029】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0030】
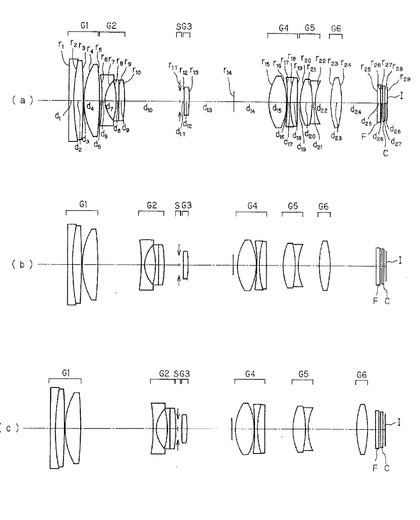
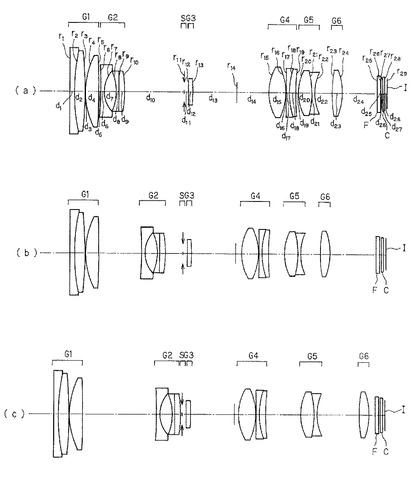
実施例2の屈曲変倍光学系は、図2に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は物体側に移動し、第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より若干物体側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0031】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第3レンズ群G3は、像側に凸面を向けた正メニスカスレンズ1枚からなり、第4レンズ群G4は、両凸正レンズと両凹負レンズの接合レンズと、両凸正レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0032】
非球面は、第1レンズ群G1の単レンズの両凸正レンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の接合レンズの最も物体側の面、単レンズの両凸正レンズの像側の面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0033】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0034】
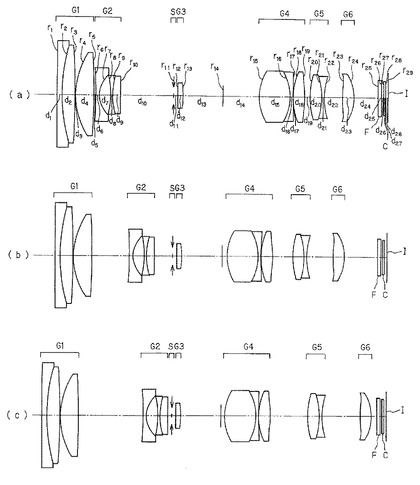
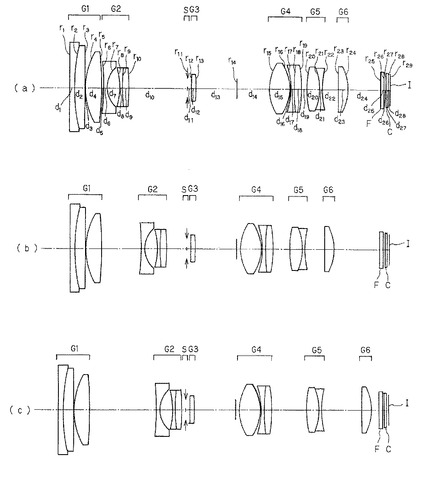
実施例3の屈曲変倍光学系は、図3に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より若干像側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0035】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、物体側に凸面を向けた正メニスカスレンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと物体側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0036】
非球面は、第1レンズ群G1の正メニスカスレンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の単レンズの両凸正レンズの両面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0037】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0038】
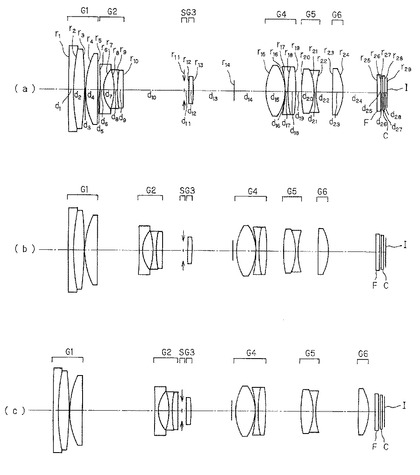
実施例4の屈曲変倍光学系は、図4に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0039】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと物体側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0040】
非球面は、第1レンズ群G1の両凸正レンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の単レンズの両凸正レンズの両面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0041】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0042】
実施例5の屈曲変倍光学系は、図5に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0043】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、像側に凸面を向けた負メニスカスレンズと像側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、像側に凸面を向けた正メニスカスレンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと物体側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0044】
非球面は、第1レンズ群G1の両凸正レンズの両面、第2レンズ群G2の両凹負レンズの像側の面、第4レンズ群G4の両凸正レンズの両面、第6レンズ群G6の両凸正レンズの像側の面の6面に用いている。
【0045】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0046】
実施例6の屈曲変倍光学系は、図6に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0047】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0048】
非球面は、第1レンズ群G1の単レンズの両凸正レンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の両凸正レンズの両面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0049】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0050】
以下に、上記各実施例の数値データを示すが、記号は上記の外、fは全系焦点距離、FNOはFナンバー、2ωは画角、WEは広角端、STは中間状態、TEは望遠端、r1 、r2 …は各レンズ面の曲率半径、d1 、d2 …は各レンズ面間の間隔、nd1、nd2…は各レンズのd線の屈折率、νd1、νd2…は各レンズのアッベ数である。なお、非球面形状は、xを光の進行方向を正とした光軸とし、yを光軸と直交する方向にとると、下記の式にて表される。
【0051】
x=(y2 /r)/[1+{1−(K+1)(y/r)2 }1/2 ]
+A4 y4 +A6 y6 +A8 y8 +A10y10
ただし、rは近軸曲率半径、Kは円錐係数、A4 、A6 、A8 、A10はそれぞれ4次、6次、8次、10次の非球面係数である。
【0052】
実施例1
r1 = 10000.000 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 54.315 d2 = 2.28 nd2 =1.48749 νd2 =70.23
r3 = -168.262 d3 = 0.15
r4 = 17.458 (非球面) d4 = 3.92 nd3 =1.51633 νd3 =64.14
r5 = -80.401 (非球面) d5 = (可変)
r6 = -41.373 d6 = 0.85 nd4 =1.74320 νd4 =49.34
r7 = 5.913 (非球面) d7 = 2.74
r8 = -18.988 d8 = 0.63 nd5 =1.69680 νd5 =55.53
r9 = -2001.711 d9 = 1.44 nd6 =1.92286 νd6 =20.88
r10= -32.133 d10= (可変)
r11= ∞(絞り) d11= 0.98
r12= 119.255 d12= 1.27 nd7 =1.66680 νd7 =33.05
r13= -37.684 d13= 11.00
r14= ∞(仮想面) d14= (可変)
r15= 11.075 (非球面) d15= 4.48 nd8 =1.49700 νd8 =81.61
r16= -12.821 (非球面) d16= 0.15
r17= -48.898 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 22.800 d18= 1.79 nd10=1.67270 νd10=32.10
r19= -1864.706 d19= (可変)
r20= 14.504 d20= 3.12 nd11=1.49700 νd11=81.61
r21= -24.900 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 12.079 d22= (可変)
r23= 20.827 d23= 2.71 nd13=1.58313 νd13=59.46
r24= -21.022 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -1.76939×10-5
A6 = 1.02257×10-7
A8 = -4.28415×10-10
A10= -2.96963×10-11
第5面
K = 0.000
A4 = 3.87596×10-6
A6 = 3.06743×10-7
A8 = -5.34413×10-9
A10= 5.29943×10-12
第7面
K = 0.000
A4 = -6.92555×10-4
A6 = -3.29478×10-6
A8 = -2.53249×10-9
A10= -2.34006×10-8
第15面
K = 0.000
A4 = -1.30651×10-4
A6 = 1.26048×10-6
A8 = -2.17108×10-8
A10= -8.42116×10-13
第16面
K = 0.000
A4 = 1.23948×10-4
A6 = 1.55067×10-6
A8 = -1.91419×10-8
A10= 2.70402×10-12
第24面
K = 0.000
A4 = 1.03984×10-4
A6 = -5.60430×10-7
A8 = -1.90947×10-8
A10= 4.68567×10-10
ズームデータ(∞)
WE ST TE
f (mm) 5.93 18.63 58.25
FNO 3.33 3.78 5.18
2ω(°) 64.05 21.38 7.07
d5 0.52 10.75 17.93
d10 13.77 3.68 0.51
d14 8.65 1.17 0.99
d19 0.61 4.10 7.05
d22 3.80 5.21 11.91
d24 8.71 11.28 1.80 。
【0053】
実施例2
r1 = 653.204 d1 = 1.26 nd1 =1.84666 νd1 =23.78
r2 = 43.561 d2 = 3.37 nd2 =1.48749 νd2 =70.23
r3 = -210.296 d3 = 0.15
r4 = 18.151 (非球面) d4 = 4.62 nd3 =1.62299 νd3 =58.12
r5 = -145.174 (非球面) d5 = (可変)
r6 = -92.644 d6 = 0.90 nd4 =1.80610 νd4 =40.92
r7 = 5.852 (非球面) d7 = 2.86
r8 = -24.154 d8 = 0.60 nd5 =1.88300 νd5 =40.76
r9 = 16.994 d9 = 1.95 nd6 =1.92286 νd6 =20.88
r10= -712.410 d10= (可変)
r11= ∞(絞り) d11= 1.00
r12= -601.720 d12= 1.19 nd7 =1.80518 νd7 =25.42
r13= -33.661 d13= 10.30
r14= ∞(仮想面) d14= (可変)
r15= 13.760 (非球面) d15= 7.78 nd8 =1.61881 νd8 =63.85
r16= -12.950 d16= 0.70 nd9 =1.90366 νd9 =31.31
r17= 86.120 d17= 0.15
r18= 16.484 d18= 2.85 nd10=1.58423 νd10=30.49
r19= -28.611 (非球面) d19= (可変)
r20= 19.360 d20= 2.96 nd11=1.48749 νd11=70.44
r21= -21.122 d21= 0.73 nd12=2.00069 νd12=25.46
r22= 18.596 d22= (可変)
r23= 27.717 (非球面) d23= 2.87 nd13=1.52542 νd13=55.78
r24= -14.958 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = 5.07069×10-7
A6 = -1.07496×10-7
A8 = -2.84760×10-10
A10= 1.57752×10-12
第5面
K = 0.000
A4 = 2.50503×10-5
A6 = -2.66972×10-7
A8 = 1.18662×10-9
A10= -1.69886×10-12
第7面
K = 0.000
A4 = -4.89796×10-4
A6 = -5.38468×10-6
A8 = -2.51002×10-9
A10= -1.67791×10-8
第15面
K = 0.000
A4 = 3.28920×10-5
A6 = 1.13870×10-6
A8 = -1.30908×10-8
A10= 1.67483×10-10
第19面
K = 0.000
A4 = 1.74075×10-4
A6 = 2.01408×10-6
A8 = -3.08884×10-8
A10= 4.92822×10-10
第23面
K = 0.000
A4 = -4.08561×10-4
A6 = 1.38541×10-6
A8 = -1.40860×10-7
A10= -3.27813×10-10
第24面
K = 0.000
A4 = -2.49782×10-4
A6 = 8.61175×10-7
A8 = -1.05973×10-7
A10= -2.81721×10-11
ズームデータ(∞)
WE ST TE
f (mm) 4.75 14.68 46.38
FNO 3.46 3.99 4.99
2ω(°) 79.46 27.08 8.95
d5 0.51 9.56 16.39
d10 13.48 4.67 0.98
d14 9.18 1.25 0.95
d19 1.39 5.16 9.55
d22 4.63 6.67 9.63
d24 6.17 8.29 1.25 。
【0054】
実施例3
r1 = 633.665 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 50.330 d2 = 2.80 nd2 =1.48749 νd2 =70.23
r3 = -80.739 d3 = 0.15
r4 = 19.524 (非球面) d4 = 3.17 nd3 =1.58913 νd3 =61.28
r5 = 14313.525 (非球面) d5 = (可変)
r6 = -229.738 d6 = 0.84 nd4 =1.74320 νd4 =49.34
r7 = 7.215 (非球面) d7 = 2.69
r8 = -16.087 d8 = 0.78 nd5 =1.72916 νd5 =54.68
r9 = 23.566 d9 = 1.56 nd6 =1.92286 νd6 =20.88
r10= 365.979 d10= (可変)
r11= ∞(絞り) d11= 1.00
r12= 98.169 d12= 1.22 nd7 =1.83481 νd7 =42.71
r13= -58.012 d13= 10.30
r14= ∞(仮想面) d14= (可変)
r15= 10.954 (非球面) d15= 4.87 nd8 =1.49700 νd8 =81.61
r16= -10.658 (非球面) d16= 0.15
r17= -24.588 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 31.642 d18= 1.97 nd10=1.67270 νd10=32.10
r19= -45.379 d19= (可変)
r20= 29.701 d20= 3.06 nd11=1.49700 νd11=81.61
r21= -14.406 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 20.241 d22= (可変)
r23= 88.742 (非球面) d23= 2.54 nd13=1.58313 νd13=59.46
r24= -13.428 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -3.72162×10-6
A6 = -8.21416×10-8
A8 = -7.59290×10-10
A10= -3.86636×10-12
第5面
K = 0.000
A4 = 6.32385×10-6
A6 = -1.23106×10-7
A8 = -7.39925×10-10
A10= 9.42069×10-13
第7面
K = 0.000
A4 = -1.94793×10-4
A6 = 2.03756×10-6
A8 = -4.21904×10-8
A10= -2.05749×10-9
第15面
K = 0.148
A4 = -1.53405×10-4
A6 = 1.14566×10-6
A8 = -2.68332×10-8
A10= -6.55570×10-10
第16面
K = 0.000
A4 = 1.88758×10-4
A6 = 2.90402×10-6
A8 = -8.02417×10-8
A10= 2.85326×10-10
第23面
K = 0.000
A4 = -2.31264×10-4
A6 = 8.09133×10-6
A8 = -4.77171×10-7
A10= 1.29270×10-8
第24面
K = 0.000
A4 = -1.02238×10-4
A6 = 4.65634×10-6
A8 = -3.32015×10-7
A10= 9.70259×10-9
ズームデータ(∞)
WE ST TE
f (mm) 5.92 17.67 57.19
FNO 3.50 3.95 5.14
2ω(°) 67.35 22.80 7.28
d5 0.56 10.49 18.34
d10 15.49 5.33 1.03
d14 8.02 0.83 0.94
d19 1.40 4.31 8.92
d22 3.94 4.89 10.61
d24 8.80 12.12 1.69 。
【0055】
実施例4
r1 = 673.793 d1 = 1.30 nd1 =1.84666 νd1 =23.78
r2 = 52.632 d2 = 2.77 nd2 =1.48749 νd2 =70.23
r3 = -106.741 d3 = 0.15
r4 = 20.563 (非球面) d4 = 3.26 nd3 =1.58913 νd3 =61.28
r5 = -393.064 (非球面) d5 = (可変)
r6 = -165.505 d6 = 0.90 nd4 =1.74320 νd4 =49.34
r7 = 7.887 (非球面) d7 = 2.98
r8 = -19.686 d8 = 0.83 nd5 =1.77250 νd5 =49.60
r9 = 19.904 d9 = 1.71 nd6 =1.92286 νd6 =20.88
r10= 212.774 d10= (可変)
r11= ∞(絞り) d11= 1.00
r12= 142.798 d12= 1.33 nd7 =1.60311 νd7 =60.64
r13= -30.008 d13= 11.00
r14= ∞(仮想面) d14= (可変)
r15= 13.668 (非球面) d15= 4.51 nd8 =1.49700 νd8 =81.61
r16= -14.634 (非球面) d16= 0.15
r17= -68.494 d17= 0.85 nd9 =1.83481 νd9 =42.71
r18= 33.935 d18= 1.70 nd10=1.67270 νd10=32.10
r19= -201.057 d19= (可変)
r20= 27.102 d20= 3.57 nd11=1.49700 νd11=81.61
r21= -13.854 d21= 0.78 nd12=1.90366 νd12=31.31
r22= 25.010 d22= (可変)
r23= 154.360 (非球面) d23= 2.67 nd13=1.58913 νd13=61.28
r24= -13.456 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = 1.31074×10-6
A6 = -7.65863×10-8
A8 = -2.61029×10-10
A10= 1.36136×10-12
第5面
K = 0.000
A4 = 1.31905×10-5
A6 = -1.45275×10-7
A8 = 4.13701×10-10
A10= -9.48730×10-14
第7面
K = 0.000
A4 = -1.79208×10-4
A6 = 4.85330×10-6
A8 = -2.03327×10-7
A10= 2.13211×10-9
第15面
K = -0.054
A4 = -1.06426×10-4
A6 = 1.35813×10-6
A8 = -2.53397×10-8
A10= -2.47379×10-10
第16面
K = 0.000
A4 = 4.18820×10-5
A6 = 1.96264×10-6
A8 = -4.33068×10-8
A10= 0
第23面
K = 0.000
A4 = -1.83225×10-4
A6 = 7.52358×10-6
A8 = -1.22202×10-7
A10= 3.29718×10-9
第24面
K = 0.000
A4 = -5.69683×10-5
A6 = 5.02624×10-6
A8 = -8.57219×10-8
A10= 3.13423×10-9
ズームデータ(∞)
WE ST TE
f (mm) 6.32 18.30 60.99
FNO 3.56 3.99 5.50
2ω(°) 67.21 23.37 7.33
d5 0.59 10.85 19.15
d10 15.45 5.17 1.10
d14 9.32 1.43 1.00
d19 1.39 4.54 8.82
d22 3.84 5.62 12.13
d24 9.25 12.22 1.85 。
【0056】
実施例5
r1 = 633.665 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 50.904 d2 = 2.71 nd2 =1.48749 νd2 =70.23
r3 = -97.884 d3 = 0.15
r4 = 20.036 (非球面) d4 = 3.27 nd3 =1.58913 νd3 =61.28
r5 = -424.570 (非球面) d5 = (可変)
r6 = -154.607 d6 = 0.85 nd4 =1.74320 νd4 =49.34
r7 = 7.037 (非球面) d7 = 3.13
r8 = -13.249 d8 = 0.65 nd5 =1.72916 νd5 =54.68
r9 = -400.246 d9 = 1.44 nd6 =1.92286 νd6 =20.88
r10= -31.893 d10= (可変)
r11= ∞(絞り) d11= 0.99
r12= -2601.620 d12= 1.14 nd7 =1.90366 νd7 =31.31
r13= -48.956 d13= 11.00
r14= ∞(仮想面) d14= (可変)
r15= 11.696 (非球面) d15= 4.30 nd8 =1.49700 νd8 =81.61
r16= -13.542 (非球面) d16= 0.15
r17= -186.492 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 18.191 d18= 1.76 nd10=1.67270 νd10=32.10
r19= 88.947 d19= (可変)
r20= 13.139 d20= 3.44 nd11=1.49700 νd11=81.61
r21= -22.439 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 12.447 d22= (可変)
r23= 37.219 d23= 2.40 nd13=1.58913 νd13=61.28
r24= -15.857 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -5.42983×10-6
A6 = 1.38492×10-8
A8 = -1.14651×10-10
A10= -1.84230×10-11
第5面
K = 0.000
A4 = 4.72650×10-6
A6 = 8.65089×10-8
A8 = -2.41488×10-9
A10= -1.57422×10-12
第7面
K = 0.000
A4 = -2.92122×10-4
A6 = 4.31976×10-6
A8 = -2.28965×10-7
A10= 3.36891×10-10
第15面
K = 0.597
A4 = -1.90173×10-4
A6 = 1.68973×10-6
A8 = -4.82919×10-8
A10= -2.13859×10-11
第16面
K = 0.000
A4 = 9.02659×10-5
A6 = 2.98286×10-6
A8 = -7.15741×10-8
A10= 4.04396×10-10
第24面
K = 0.000
A4 = 1.14189×10-4
A6 = -4.67268×10-6
A8 = 1.49193×10-7
A10= -1.97043×10-9
ズームデータ(∞)
WE ST TE
f (mm) 5.93 17.72 57.17
FNO 3.29 3.74 5.12
2ω(°) 66.47 22.63 7.27
d5 0.53 10.81 18.72
d10 15.11 4.51 0.49
d14 8.16 1.50 1.00
d19 0.71 4.07 8.96
d22 4.36 4.96 10.54
d24 8.85 11.58 1.57 。
【0057】
実施例6
r1 = 653.204 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 45.090 d2 = 2.75 nd2 =1.48749 νd2 =70.23
r3 = -1318.530 d3 = 0.15
r4 = 17.489 (非球面) d4 = 3.89 nd3 =1.58913 νd3 =61.28
r5 = -89.343 (非球面) d5 = (可変)
r6 = -69.566 d6 = 0.85 nd4 =1.74320 νd4 =49.34
r7 = 5.831 (非球面) d7 = 3.24
r8 = -17.167 d8 = 0.65 nd5 =1.72916 νd5 =54.68
r9 = 36.171 d9 = 1.67 nd6 =1.92286 νd6 =20.88
r10= -70.564 d10= (可変)
r11= ∞(絞り) d11= 0.99
r12= 270.431 d12= 1.22 nd7 =1.80610 νd7 =40.92
r13= -40.685 d13= 10.30
r14= ∞(仮想面) d14= (可変)
r15= 10.699 (非球面) d15= 5.20 nd8 =1.49700 νd8 =81.61
r16= -9.876 (非球面) d16= 0.30
r17= -17.644 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 43.893 d18= 1.92 nd10=1.67270 νd10=32.10
r19= -34.846 d19= (可変)
r20= 24.139 d20= 3.18 nd11=1.49700 νd11=81.61
r21= -14.346 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 20.703 d22= (可変)
r23= 78.738 (非球面) d23= 2.44 nd13=1.58313 νd13=59.46
r24= -13.952 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -1.16015×10-5
A6 = -4.58545×10-8
A8 = -3.84761×10-10
A10= -3.35581×10-12
第5面
K = 0.000
A4 = 1.33373×10-5
A6 = -4.99311×10-8
A8 = -5.87507×10-10
A10= 1.02292×10-12
第7面
K = 0.000
A4 = -5.20765×10-4
A6 = -2.71776×10-6
A8 = -1.24289×10-7
A10= -1.36863×10-8
第15面
K = -0.134
A4 = -1.02927×10-4
A6 = 1.88604×10-6
A8 = -3.12601×10-8
A10= -5.20707×10-10
第16面
K = 0.000
A4 = 2.18544×10-4
A6 = 4.30526×10-6
A8 = -1.07154×10-7
A10= 6.47450×10-10
第23面
K = 0.000
A4 = -4.32618×10-4
A6 = 2.38110×10-5
A8 = -1.34005×10-6
A10= 2.83017×10-8
第24面
K = 0.000
A4 = -2.89557×10-4
A6 = 1.99791×10-5
A8 = -1.10217×10-6
A10= 2.24820×10-8
ズームデータ(∞)
WE ST TE
f (mm) 5.45 16.62 52.65
FNO 3.45 3.90 4.99
2ω(°) 71.40 24.07 7.92
d5 0.51 9.94 16.76
d10 14.78 5.07 1.03
d14 8.04 1.00 0.94
d19 1.38 4.23 8.75
d22 3.93 4.95 9.98
d24 8.25 11.41 1.93 。
【0058】
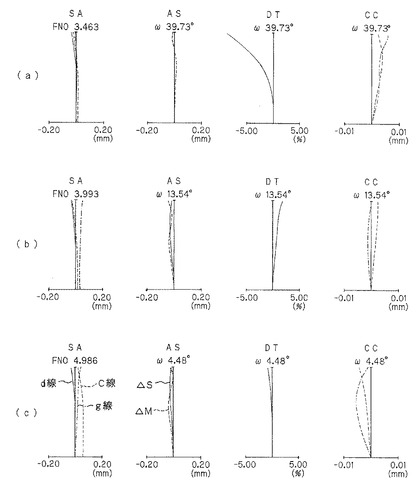
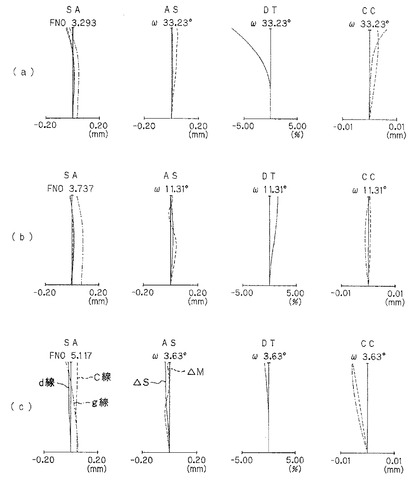
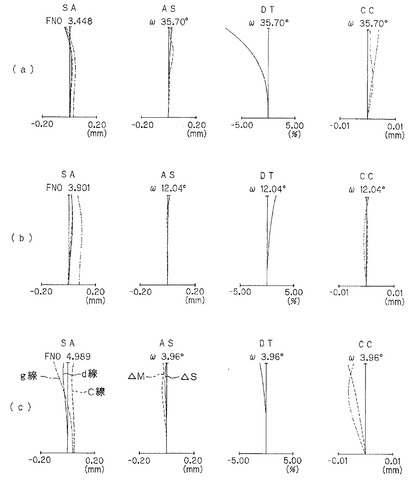
以上の実施例1〜6の無限遠物点合焦時の収差図をそれぞれ図7〜図12に示す。これらの収差図において、(a)は広角端、(b)は中間状態、(c)は望遠端における球面収差(SA)、非点収差(AS)、歪曲収差(DT)、倍率色収差(CC)を示す。各図中、"ω"は半画角を示す。
【0059】
上記実施例1〜6の条件式(1)〜(2)の値は次の通りである。
【0060】
実施例1 実施例2 実施例3 実施例4 実施例5 実施例6
(1)ft /f2 -8.72 -8.97 -9.00 -8.90 -8.03 -8.96
(2)ft /ftg12 -1.19 -1.42 -1.39 -1.34 -1.15 -1.32
。
【0061】
図13に、上記実施例3の変倍光学系において、第3レンズ群G3と第4レンズ群G4の間に光軸を略直角(例えば、90°)に屈曲させる表面反射ミラーRを光軸に対して45°の角度で配置した場合の広角端(a)と望遠端(c)での断面図を示す。他の実施例の変倍光学系においても同様である。
【0062】
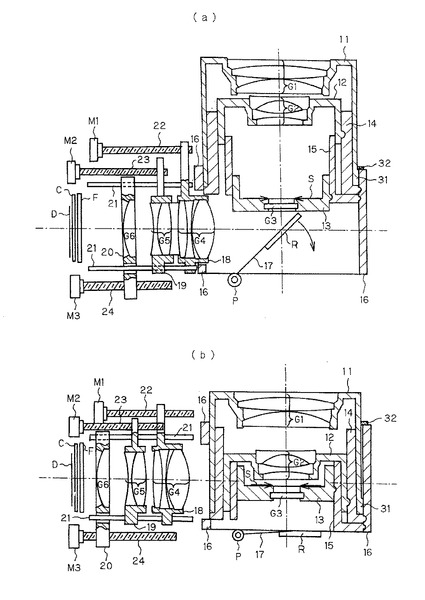
次に、以上のような表面反射ミラーRを配置する本発明の変倍光学系の収納のための機械的構成の1例を図14に示す。図14(a)は光学系の撮影時の断面図であり、図14(b)はその収納時の断面図である。
【0063】
光軸を中心に外側から内側へ、第1レンズ枠11、第1カム枠14、第2レンズ枠12、第2カム枠15、第3レンズ枠13が同心に嵌合状態にある。第1レンズ群G1、第2レンズ群G2、及び、第3レンズ群G3がそれぞれ第1レンズ枠11、第2レンズ枠12、第3レンズ枠13に保持されている。開口絞りSは第3レンズ枠13に保持されている。そして、第1レンズ群G1、第2レンズ群G2、第3レンズ群G3それぞれは光軸方向への移動を案内するキーを備えている。
【0064】
第1カム枠14、第2カム枠15は、それぞれ下端外周面の一部が外枠16の内周面の一部と嵌合状態にあり、それぞれの下端外周面に配置されたカムピンと外枠16の内周面に設けられたカム溝とが係合している。
【0065】
また、外枠16の上面に抜け止め片32が紫外線硬化型等の接着剤で接着されている。そして、第1レンズ枠11の下部に突起31が設けられている。
【0066】
第1レンズ枠11は第1カム枠14の光軸方向移動に追従して光軸方向に移動するようい構成されている。
【0067】
また、第1カム枠14の内周面に設けられたカム溝と第2レンズ枠12の外周面に配置されたカムピンとが係合している。
【0068】
また、第2カム枠15の内周面に設けられたカム溝と第3レンズ枠13の外周面に配置されたカムピンとが係合している。
【0069】
そのため、第1カム枠14の回転に伴って第1レンズ枠11と第2レンズ枠12が所定軌跡で光軸方向に移動され、第2カム枠15の回転に伴って第3レンズ枠13が光軸方向の所定位置に移動される。そして、図14(a)に示された状態を保持するために、第1カム枠14と外枠16から第1レンズ枠11が飛び出さないように第1レンズ枠11の突起31は外枠16の抜け止め片32に当接して移動が規制されるように構成されている。
【0070】
第1カム枠14と第2カム枠15は図示されていないモータと連結されている。
【0071】
この第3レンズ枠13の直下には外枠16に設けられた捩じりばねと支持軸からなり、回動支点軸Pを持つ回動レバー17が配置されており、この回動レバー17に反射ミラーRが接合されている。
【0072】
そして、物体側から入射する光軸は、第3レンズ群G3の撮像素子側にある反射ミラーRによって約90゜折り曲げられて、第4レンズ群G4に入射する。外枠16の側面には第4レンズ群G4の光軸に対して垂直に開口部が設けられている。さらに、第4レンズ群G4と撮像素子Dとの間には、単独で光軸方向に移動する第5レンズ群G5、第6レンズ群G6が配置されている。
【0073】
上記モータの回転軸の回転がねじを介して係合部に伝わり、第1レンズ枠11、第2レンズ枠12及び第3レンズ枠13がキー軸に沿って移動する。なお、第1レンズ枠11及び第2レンズ枠12がキー軸に沿って移動するための駆動用のモータと、第3レンズ枠13がキー軸に沿って所定位置に移動するための駆動用のモータとは、別々に設けることもできる。
【0074】
このとき、収納時から撮影時や撮影時から収納時において、第4レンズ群G4、第5レンズ群G5及び第6レンズ群G6は外枠16の開口部から撮像素子D側に移動した状態において、第1カム枠14及び第2カム枠15が下降するようになっている。また、撮影時の状態において、第4レンズ群G4、第5レンズ群G5及び第6レンズ群G6は開口部よりも撮像素子D側に配置するようにしてもよい。さらに、第2カム枠15の内側の一部が回動レバー17に当接し、さらに第2カム枠15が下降し、回動レバー17の回動支点軸Pに付勢力が加わった状態でモータは停止する。
【0075】
以上が撮影時から収納時におけるズームレンズ(変倍光学系)の動作である。また、収納時から撮影時においては、モータの駆動軸を逆回転させて、第1カム枠14と第2カム枠15の移動が開始され、第1レンズ枠11、第2レンズ枠12及び第3レンズ枠13を収納状態から撮影状態に移動させる。外枠16の開口部の上面より上昇した状態に同期して、第4レンズ群G4、第5レンズ群G5及び第6レンズ群G6が撮影時の所定の位置に移動する。第1レンズ群G1、第2レンズ群G2及び第3レンズ群G3が撮影時の所望位置で停止すると、撮影時の状態となる。この構成と類似の技術は特許文献4の図1に記載されている。
【0076】
次に、第4レンズ群G4と第4レンズ枠18、第5レンズ群G4と第5レンズ枠19、及び、第6レンズ群G6と第6レンズ枠20との関係について説明をする。
【0077】
第4レンズ枠18は、ガイドシャフト21の一方が挿通支持する挿通孔とモータM1の回転軸であるネジ軸22に支持されている。これにより、モータM1が回転すると第4レンズ枠18が光軸に沿う方向に移動するようになっている。
【0078】
第5レンズ枠19、第6レンズ枠20は、ガイドシャフト21の一方が挿通支持する挿通孔とそれぞれモータM2、M3の回転軸であるネジ軸23、24に支持されている。これにより、それぞれモータM2、M3が回転すると、第5レンズ枠19、第6レンズ枠20が光軸に沿う方向に移動するようになっている。
【0079】
次に、撮影時の状態から収納状態への動作を説明する。第4レンズ群G4を支持する第4レンズ枠18と、第5レンズ群G5を支持する第5レンズ枠19と、第6レンズ群G6を支持する第6レンズ枠20が撮像素子D側に移動した後に停止する。このとき、移動開始時は、第4レンズ枠18が外枠16から左側に移動した後に、第1レンズ枠11、第1カム枠14等が下降し、これらの枠と衝突しないようにする。
【図面の簡単な説明】
【0080】
【図1】本発明の実施例1の変倍光学系の光路を展開した無限遠物点合焦時の広角端(a)、中間状態(b)、望遠端(c)でのレンズ断面図である。
【図2】本発明の実施例2の変倍光学系の図1と同様のレンズ断面図である。
【図3】本発明の実施例3の変倍光学系の図1と同様のレンズ断面図である。
【図4】本発明の実施例4の変倍光学系の図1と同様のレンズ断面図である。
【図5】本発明の実施例5の変倍光学系の図1と同様のレンズ断面図である。
【図6】本発明の実施例6の変倍光学系の図1と同様のレンズ断面図である。
【図7】実施例1の無限遠物点合焦時の広角端(a)、中間状態(b)、望遠端(c)での収差図である。
【図8】実施例2の図7と同様の収差図である。
【図9】実施例3の図7と同様の収差図である。
【図10】実施例4の図7と同様の収差図である。
【図11】実施例5の図7と同様の収差図である。
【図12】実施例6の図7と同様の収差図である。
【図13】実施例3の変倍光学系の光軸を90°屈曲させる場合の広角端(a)と望 遠端(c)での断面図である。
【図14】本発明の変倍光学系の収納のための機械的構成の1例を示す図である。
【符号の説明】
【0081】
G1…第1レンズ群
G2…第2レンズ群
G3…第3レンズ群
G4…第4レンズ群
G5…第5レンズ群
G6…第6レンズ群
S…開口絞り
F…光学的ローパスフィルター
C…CCDのカバーガラス
I…CCDの像面
R…反射ミラー
P…回動支点軸
D…撮像素子
M1、M2、M3…モータ
11…第1レンズ枠
12…第2レンズ枠
13…第3レンズ枠
14…第1カム枠
15…第2カム枠
16…外枠
17…回動レバー
18…第4レンズ枠
19…第5レンズ枠
20…第6レンズ枠
21…ガイドシャフト
22、23、24…ネジ軸
31…突起
32…抜け止め片
【技術分野】
【0001】
本発明は、変倍光学系及びそれを用いた撮像装置に関し、特に、前玉有効径の比較的小さい高変倍光学系及びそれを用いた撮像装置に関するものである。
【背景技術】
【0002】
近年、デジタルスチルカメラのように電子撮像素子を用いた撮像装置が幅広く普及している。デジタルスチルカメラの発展と普及に伴い、高変倍で小型の光学系が求められている。
【0003】
高変倍の光学系においては、物体側から順に、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群を有し、第3レンズ群近傍に開口絞りを持つ光学系が以前から多く提案されている。この構成の場合、変倍のほとんどを第2レンズ群が光軸上を移動することによって行っている。
【0004】
特許文献1に記載のものでは、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群で構成され、開口絞りは、変倍時に移動する第2レンズ群と第3レンズ群の間で、変倍時に移動しない構成になっている。
【0005】
また、特許文献2に記載のものは、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群で構成され、第1レンズ群、第3レンズ群、第5レンズ群群が変倍時固定されており、開口絞りは第3レンズ群と一体で構成されている。
【0006】
特許文献3に記載のものは、正の第1レンズ群、負の第2レンズ群、正の第3レンズ群、正の第4レンズ群、負の第5レンズ群、正の第6レンズ群で構成され、第1レンズ群、第4レンズ群、第6レンズ群が変倍時固定されている。開口絞りは第3レンズ群と一体となり、変倍時に移動している。
【特許文献1】特開平5−113538号公報
【特許文献2】特開平8−327904号公報
【特許文献3】特開2001−75008号公報
【特許文献4】特開平11−64714号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記何れの特許文献においても、第2レンズ群の倍率変化が全体の倍率変化の大部分を占めて高変倍を達成しており、開口絞りは第2レンズ群よりも撮像面側に配置されている。
【0008】
第2レンズ群が倍率変化のほとんどを負担する場合、変倍比を高める場合には、第2レンズ群の移動量を大きくするか、第2レンズ群の屈折力を高める必要がある。
【0009】
ところが、第2レンズ群の移動量が大きくなると、鏡枠機構が複雑又は大型化し、屈折力を高めると変倍による収差変動が大きくなり、光学性能の確保が難しくなってくる。また、入射瞳位置が光学系の奥になってしまい、第1レンズ群の有効径が大きくなるため、高変倍化と小型の両立が難しく、有効径が大きくなるにつれて重量が増えることから、駆動機構自体の強度を高める必要があり、大型化、複雑化につながる。
【0010】
しかし、開口絞りよりも撮像面側で変倍の負担を大きくすると、射出瞳位置の変動が大きくなることから電子撮像素子では受光効率が悪化するため、開口絞りより後方での変倍負担を高めることは好ましくない。
【0011】
本発明は従来技術のこのような状況に鑑みてなされたものであり、その目的は、前玉有効径の比較的小さい高変倍光学系及びそれを用いた撮像装置を提供することである。
【課題を解決するための手段】
【0012】
上記目的を達成する本発明の変倍光学系は、物体側から順に、正の屈折力を有する第1レンズ群と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群と、シャッタ及び開口絞りを有する変倍時に固定の正の屈折力を有する第3レンズ群と、正の屈折力を有する第4レンズ群と、負の屈折力を有する第5レンズ群とを有し、以下の条件式を満足することを特徴とするものである。
【0013】
−10<ft /f2 <−7 ・・・(1)
−1.8≦ft /ftg12≦−0.92 ・・・(2)
ただし、ft は望遠端での全系の焦点距離、
f2 は第2レンズ群の焦点距離、
ftg12は望遠端における第1レンズ群と第2レンズ群の合成焦点距離、
である。
【0014】
以下、本発明において上記構成をとる理由と作用を説明する。
【0015】
以上の変倍光学系のように、物体側から順に、正の屈折力を有する第1レンズ群と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群と、シャッタ及び開口絞りを有する変倍時に固定の正の屈折力を有する第3レンズ群と、正の屈折力を有する第4レンズ群、負の屈折力を有する第5レンズ群とを有する構成とすることで、前玉有効径の比較的小さい高変倍光学系を得ることができる。
【0016】
条件式(1)は、最も大きな変倍効果を有する第2レンズ群の焦点距離に関する条件式であり、その上限の−7を上回ると、第2レンズ群の移動量が大きくなるため、鏡枠が大きくなるか、又は複雑になり、下限の−10を下回ると、第2レンズ群の変倍負担が大きくなるため、第2レンズ群の偏心による望遠側での像面の倒れが大きくなる。
【0017】
条件式(2)は、望遠端における第1レンズ群と第2レンズ群の合成焦点距離に関する条件式であり、その上限の−0.92を上回ると、第2レンズ群の変倍負担が大きく、望遠側の球面収差と広角側の軸外収差の両立が難しくなり、また、前玉径が大きく、重くなるなるため、変倍のための駆動機構の負担が大きくなる。また、下限の−1.8を下回ると、望遠側での全長が長くなり、小型化が難しくなる。
【0018】
この場合に、正の屈折力を有する第3レンズ群の撮像面側に光軸を略直角に屈曲させる反射部材を有することが望ましい。
【0019】
このように構成して、第3レンズ群の撮像面側で光軸を折り曲げることにより、鏡筒の繰り出し機構を簡略化することができ、また、沈胴して収納時の厚みを抑えることができる。
【0020】
また、前記反射部材は表面反射ミラーからなることが望ましい。
【0021】
すなわち、反射部材として表面反射ミラーを用いることで、重量を抑えて保持機構を簡素にすることが可能である。
【0022】
本発明は、以上の変倍光学系と、その変倍光学系の像側に配され、光学像を電気信号に変換する撮像素子とを備えた撮像装置を含むものである。
【0023】
この場合に、前記変倍光学系と前記撮像素子との間にローパスフィルターを配置することが望ましい。
【発明の効果】
【0024】
以上の本発明によると、前玉有効径の比較的小さい高変倍光学系とそれを用いた撮像装置を得ることができる。本発明の変倍光学系は、特に薄く小型に収納可能な屈曲変倍光学系に最適なものである。
【発明を実施するための最良の形態】
【0025】
以下、本発明の変倍光学系の実施例1〜6について説明する。実施例1〜6の変倍光学系の光路を展開した無限遠物点合焦時の広角端(a)、中間状態(b)、望遠端(c)でのレンズ断面図をそれぞれ図1〜図6に示す。各図中、第1レンズ群はG1、第2レンズ群はG2、開口絞りはS、第3レンズ群はG3、第4レンズ群はG4、第5レンズ群はG5、第6レンズ群はG6、光学的ローパスフィルターはF、電子撮像素子であるCCDのカバーガラスはC、CCDの像面はIで示してある。なお、近赤外シャープカットコートについては、例えば光学的ローパスフィルターFに直接コートを施こしてもよく、また、別に赤外カット吸収フィルターを配置してもよく、あるいは、透明平板の入射面に近赤外シャープカットコートしたものを用いてもよい。
【0026】
実施例1の屈曲変倍光学系は、図1に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は物体側に移動し、第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より若干物体側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0027】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、像側に凸面を向けた負メニスカスレンズと像側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0028】
非球面は、第1レンズ群G1の単レンズの両凸正レンズの両面、第2レンズ群G2の両凹負レンズの像側の面、第4レンズ群G4の単レンズの両凸正レンズの両面、第6レンズ群G6の両凸正レンズの像側の面の6面に用いている。
【0029】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0030】
実施例2の屈曲変倍光学系は、図2に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は物体側に移動し、第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より若干物体側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0031】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第3レンズ群G3は、像側に凸面を向けた正メニスカスレンズ1枚からなり、第4レンズ群G4は、両凸正レンズと両凹負レンズの接合レンズと、両凸正レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0032】
非球面は、第1レンズ群G1の単レンズの両凸正レンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の接合レンズの最も物体側の面、単レンズの両凸正レンズの像側の面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0033】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0034】
実施例3の屈曲変倍光学系は、図3に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より若干像側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0035】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、物体側に凸面を向けた正メニスカスレンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと物体側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0036】
非球面は、第1レンズ群G1の正メニスカスレンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の単レンズの両凸正レンズの両面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0037】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0038】
実施例4の屈曲変倍光学系は、図4に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0039】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと物体側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0040】
非球面は、第1レンズ群G1の両凸正レンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の単レンズの両凸正レンズの両面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0041】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0042】
実施例5の屈曲変倍光学系は、図5に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0043】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、像側に凸面を向けた負メニスカスレンズと像側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第3レンズ群G3は、像側に凸面を向けた正メニスカスレンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと物体側に凸面を向けた正メニスカスレンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0044】
非球面は、第1レンズ群G1の両凸正レンズの両面、第2レンズ群G2の両凹負レンズの像側の面、第4レンズ群G4の両凸正レンズの両面、第6レンズ群G6の両凸正レンズの像側の面の6面に用いている。
【0045】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0046】
実施例6の屈曲変倍光学系は、図6に示すように、物体側から順に、正屈折力の第1レンズ群G1、負屈折力の第2レンズ群G2、開口絞りS、正屈折力の第3レンズ群G3、正屈折力の第4レンズ群G4、負屈折力の第5レンズ群G5、正屈折力の第6レンズ群G6から構成されており、広角端から望遠端への変倍をする際に、第1レンズ群G1は像側に凸の軌跡を描いて移動し、望遠端では広角端の位置より物体側に位置する。第2レンズ群G2は像側に単調に移動する。開口絞りSと第3レンズ群G3は固定であり、第4レンズ群G4は物体側に移動し、第5レンズ群G5は第4レンズ群G4との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。第6レンズ群G6は第5レンズ群G5との間隔を広げながら物体側に凸の軌跡を描いて移動し、望遠端では広角端の位置より像側に位置する。
【0047】
物体側から順に、第1レンズ群G1は、物体側に凸面を向けた負メニスカスレンズと両凸正レンズの接合レンズと、両凸正レンズとからなり、第2レンズ群G2は、両凹負レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第3レンズ群G3は、両凸正レンズ1枚からなり、第4レンズ群G4は、両凸正レンズと、両凹負レンズと両凸正レンズの接合レンズとからなり、第5レンズ群G5は、両凸正レンズと両凹負レンズの接合レンズからなり、第6レンズ群G6は、両凸正レンズ1枚からなる。
【0048】
非球面は、第1レンズ群G1の単レンズの両凸正レンズの両面、第2レンズ群G2の単レンズの両凹負レンズの像側の面、第4レンズ群G4の両凸正レンズの両面、第6レンズ群G6の両凸正レンズの両面の7面に用いている。
【0049】
そして、後記の数値データ中の第14面r14は反射面と第4レンズ群G4との干渉を防ぐために設計上設けた仮想面であり、何ら部材は存在しない。そして、第3レンズ群G3とこの仮想面r14の間に光軸を略直角(例えば、90°)に屈曲させる反射面が光軸に対して45°の角度で設けられ、その反射面は撮影時に第3レンズ群G3と一体で位置固定である。
【0050】
以下に、上記各実施例の数値データを示すが、記号は上記の外、fは全系焦点距離、FNOはFナンバー、2ωは画角、WEは広角端、STは中間状態、TEは望遠端、r1 、r2 …は各レンズ面の曲率半径、d1 、d2 …は各レンズ面間の間隔、nd1、nd2…は各レンズのd線の屈折率、νd1、νd2…は各レンズのアッベ数である。なお、非球面形状は、xを光の進行方向を正とした光軸とし、yを光軸と直交する方向にとると、下記の式にて表される。
【0051】
x=(y2 /r)/[1+{1−(K+1)(y/r)2 }1/2 ]
+A4 y4 +A6 y6 +A8 y8 +A10y10
ただし、rは近軸曲率半径、Kは円錐係数、A4 、A6 、A8 、A10はそれぞれ4次、6次、8次、10次の非球面係数である。
【0052】
実施例1
r1 = 10000.000 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 54.315 d2 = 2.28 nd2 =1.48749 νd2 =70.23
r3 = -168.262 d3 = 0.15
r4 = 17.458 (非球面) d4 = 3.92 nd3 =1.51633 νd3 =64.14
r5 = -80.401 (非球面) d5 = (可変)
r6 = -41.373 d6 = 0.85 nd4 =1.74320 νd4 =49.34
r7 = 5.913 (非球面) d7 = 2.74
r8 = -18.988 d8 = 0.63 nd5 =1.69680 νd5 =55.53
r9 = -2001.711 d9 = 1.44 nd6 =1.92286 νd6 =20.88
r10= -32.133 d10= (可変)
r11= ∞(絞り) d11= 0.98
r12= 119.255 d12= 1.27 nd7 =1.66680 νd7 =33.05
r13= -37.684 d13= 11.00
r14= ∞(仮想面) d14= (可変)
r15= 11.075 (非球面) d15= 4.48 nd8 =1.49700 νd8 =81.61
r16= -12.821 (非球面) d16= 0.15
r17= -48.898 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 22.800 d18= 1.79 nd10=1.67270 νd10=32.10
r19= -1864.706 d19= (可変)
r20= 14.504 d20= 3.12 nd11=1.49700 νd11=81.61
r21= -24.900 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 12.079 d22= (可変)
r23= 20.827 d23= 2.71 nd13=1.58313 νd13=59.46
r24= -21.022 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -1.76939×10-5
A6 = 1.02257×10-7
A8 = -4.28415×10-10
A10= -2.96963×10-11
第5面
K = 0.000
A4 = 3.87596×10-6
A6 = 3.06743×10-7
A8 = -5.34413×10-9
A10= 5.29943×10-12
第7面
K = 0.000
A4 = -6.92555×10-4
A6 = -3.29478×10-6
A8 = -2.53249×10-9
A10= -2.34006×10-8
第15面
K = 0.000
A4 = -1.30651×10-4
A6 = 1.26048×10-6
A8 = -2.17108×10-8
A10= -8.42116×10-13
第16面
K = 0.000
A4 = 1.23948×10-4
A6 = 1.55067×10-6
A8 = -1.91419×10-8
A10= 2.70402×10-12
第24面
K = 0.000
A4 = 1.03984×10-4
A6 = -5.60430×10-7
A8 = -1.90947×10-8
A10= 4.68567×10-10
ズームデータ(∞)
WE ST TE
f (mm) 5.93 18.63 58.25
FNO 3.33 3.78 5.18
2ω(°) 64.05 21.38 7.07
d5 0.52 10.75 17.93
d10 13.77 3.68 0.51
d14 8.65 1.17 0.99
d19 0.61 4.10 7.05
d22 3.80 5.21 11.91
d24 8.71 11.28 1.80 。
【0053】
実施例2
r1 = 653.204 d1 = 1.26 nd1 =1.84666 νd1 =23.78
r2 = 43.561 d2 = 3.37 nd2 =1.48749 νd2 =70.23
r3 = -210.296 d3 = 0.15
r4 = 18.151 (非球面) d4 = 4.62 nd3 =1.62299 νd3 =58.12
r5 = -145.174 (非球面) d5 = (可変)
r6 = -92.644 d6 = 0.90 nd4 =1.80610 νd4 =40.92
r7 = 5.852 (非球面) d7 = 2.86
r8 = -24.154 d8 = 0.60 nd5 =1.88300 νd5 =40.76
r9 = 16.994 d9 = 1.95 nd6 =1.92286 νd6 =20.88
r10= -712.410 d10= (可変)
r11= ∞(絞り) d11= 1.00
r12= -601.720 d12= 1.19 nd7 =1.80518 νd7 =25.42
r13= -33.661 d13= 10.30
r14= ∞(仮想面) d14= (可変)
r15= 13.760 (非球面) d15= 7.78 nd8 =1.61881 νd8 =63.85
r16= -12.950 d16= 0.70 nd9 =1.90366 νd9 =31.31
r17= 86.120 d17= 0.15
r18= 16.484 d18= 2.85 nd10=1.58423 νd10=30.49
r19= -28.611 (非球面) d19= (可変)
r20= 19.360 d20= 2.96 nd11=1.48749 νd11=70.44
r21= -21.122 d21= 0.73 nd12=2.00069 νd12=25.46
r22= 18.596 d22= (可変)
r23= 27.717 (非球面) d23= 2.87 nd13=1.52542 νd13=55.78
r24= -14.958 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = 5.07069×10-7
A6 = -1.07496×10-7
A8 = -2.84760×10-10
A10= 1.57752×10-12
第5面
K = 0.000
A4 = 2.50503×10-5
A6 = -2.66972×10-7
A8 = 1.18662×10-9
A10= -1.69886×10-12
第7面
K = 0.000
A4 = -4.89796×10-4
A6 = -5.38468×10-6
A8 = -2.51002×10-9
A10= -1.67791×10-8
第15面
K = 0.000
A4 = 3.28920×10-5
A6 = 1.13870×10-6
A8 = -1.30908×10-8
A10= 1.67483×10-10
第19面
K = 0.000
A4 = 1.74075×10-4
A6 = 2.01408×10-6
A8 = -3.08884×10-8
A10= 4.92822×10-10
第23面
K = 0.000
A4 = -4.08561×10-4
A6 = 1.38541×10-6
A8 = -1.40860×10-7
A10= -3.27813×10-10
第24面
K = 0.000
A4 = -2.49782×10-4
A6 = 8.61175×10-7
A8 = -1.05973×10-7
A10= -2.81721×10-11
ズームデータ(∞)
WE ST TE
f (mm) 4.75 14.68 46.38
FNO 3.46 3.99 4.99
2ω(°) 79.46 27.08 8.95
d5 0.51 9.56 16.39
d10 13.48 4.67 0.98
d14 9.18 1.25 0.95
d19 1.39 5.16 9.55
d22 4.63 6.67 9.63
d24 6.17 8.29 1.25 。
【0054】
実施例3
r1 = 633.665 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 50.330 d2 = 2.80 nd2 =1.48749 νd2 =70.23
r3 = -80.739 d3 = 0.15
r4 = 19.524 (非球面) d4 = 3.17 nd3 =1.58913 νd3 =61.28
r5 = 14313.525 (非球面) d5 = (可変)
r6 = -229.738 d6 = 0.84 nd4 =1.74320 νd4 =49.34
r7 = 7.215 (非球面) d7 = 2.69
r8 = -16.087 d8 = 0.78 nd5 =1.72916 νd5 =54.68
r9 = 23.566 d9 = 1.56 nd6 =1.92286 νd6 =20.88
r10= 365.979 d10= (可変)
r11= ∞(絞り) d11= 1.00
r12= 98.169 d12= 1.22 nd7 =1.83481 νd7 =42.71
r13= -58.012 d13= 10.30
r14= ∞(仮想面) d14= (可変)
r15= 10.954 (非球面) d15= 4.87 nd8 =1.49700 νd8 =81.61
r16= -10.658 (非球面) d16= 0.15
r17= -24.588 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 31.642 d18= 1.97 nd10=1.67270 νd10=32.10
r19= -45.379 d19= (可変)
r20= 29.701 d20= 3.06 nd11=1.49700 νd11=81.61
r21= -14.406 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 20.241 d22= (可変)
r23= 88.742 (非球面) d23= 2.54 nd13=1.58313 νd13=59.46
r24= -13.428 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -3.72162×10-6
A6 = -8.21416×10-8
A8 = -7.59290×10-10
A10= -3.86636×10-12
第5面
K = 0.000
A4 = 6.32385×10-6
A6 = -1.23106×10-7
A8 = -7.39925×10-10
A10= 9.42069×10-13
第7面
K = 0.000
A4 = -1.94793×10-4
A6 = 2.03756×10-6
A8 = -4.21904×10-8
A10= -2.05749×10-9
第15面
K = 0.148
A4 = -1.53405×10-4
A6 = 1.14566×10-6
A8 = -2.68332×10-8
A10= -6.55570×10-10
第16面
K = 0.000
A4 = 1.88758×10-4
A6 = 2.90402×10-6
A8 = -8.02417×10-8
A10= 2.85326×10-10
第23面
K = 0.000
A4 = -2.31264×10-4
A6 = 8.09133×10-6
A8 = -4.77171×10-7
A10= 1.29270×10-8
第24面
K = 0.000
A4 = -1.02238×10-4
A6 = 4.65634×10-6
A8 = -3.32015×10-7
A10= 9.70259×10-9
ズームデータ(∞)
WE ST TE
f (mm) 5.92 17.67 57.19
FNO 3.50 3.95 5.14
2ω(°) 67.35 22.80 7.28
d5 0.56 10.49 18.34
d10 15.49 5.33 1.03
d14 8.02 0.83 0.94
d19 1.40 4.31 8.92
d22 3.94 4.89 10.61
d24 8.80 12.12 1.69 。
【0055】
実施例4
r1 = 673.793 d1 = 1.30 nd1 =1.84666 νd1 =23.78
r2 = 52.632 d2 = 2.77 nd2 =1.48749 νd2 =70.23
r3 = -106.741 d3 = 0.15
r4 = 20.563 (非球面) d4 = 3.26 nd3 =1.58913 νd3 =61.28
r5 = -393.064 (非球面) d5 = (可変)
r6 = -165.505 d6 = 0.90 nd4 =1.74320 νd4 =49.34
r7 = 7.887 (非球面) d7 = 2.98
r8 = -19.686 d8 = 0.83 nd5 =1.77250 νd5 =49.60
r9 = 19.904 d9 = 1.71 nd6 =1.92286 νd6 =20.88
r10= 212.774 d10= (可変)
r11= ∞(絞り) d11= 1.00
r12= 142.798 d12= 1.33 nd7 =1.60311 νd7 =60.64
r13= -30.008 d13= 11.00
r14= ∞(仮想面) d14= (可変)
r15= 13.668 (非球面) d15= 4.51 nd8 =1.49700 νd8 =81.61
r16= -14.634 (非球面) d16= 0.15
r17= -68.494 d17= 0.85 nd9 =1.83481 νd9 =42.71
r18= 33.935 d18= 1.70 nd10=1.67270 νd10=32.10
r19= -201.057 d19= (可変)
r20= 27.102 d20= 3.57 nd11=1.49700 νd11=81.61
r21= -13.854 d21= 0.78 nd12=1.90366 νd12=31.31
r22= 25.010 d22= (可変)
r23= 154.360 (非球面) d23= 2.67 nd13=1.58913 νd13=61.28
r24= -13.456 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = 1.31074×10-6
A6 = -7.65863×10-8
A8 = -2.61029×10-10
A10= 1.36136×10-12
第5面
K = 0.000
A4 = 1.31905×10-5
A6 = -1.45275×10-7
A8 = 4.13701×10-10
A10= -9.48730×10-14
第7面
K = 0.000
A4 = -1.79208×10-4
A6 = 4.85330×10-6
A8 = -2.03327×10-7
A10= 2.13211×10-9
第15面
K = -0.054
A4 = -1.06426×10-4
A6 = 1.35813×10-6
A8 = -2.53397×10-8
A10= -2.47379×10-10
第16面
K = 0.000
A4 = 4.18820×10-5
A6 = 1.96264×10-6
A8 = -4.33068×10-8
A10= 0
第23面
K = 0.000
A4 = -1.83225×10-4
A6 = 7.52358×10-6
A8 = -1.22202×10-7
A10= 3.29718×10-9
第24面
K = 0.000
A4 = -5.69683×10-5
A6 = 5.02624×10-6
A8 = -8.57219×10-8
A10= 3.13423×10-9
ズームデータ(∞)
WE ST TE
f (mm) 6.32 18.30 60.99
FNO 3.56 3.99 5.50
2ω(°) 67.21 23.37 7.33
d5 0.59 10.85 19.15
d10 15.45 5.17 1.10
d14 9.32 1.43 1.00
d19 1.39 4.54 8.82
d22 3.84 5.62 12.13
d24 9.25 12.22 1.85 。
【0056】
実施例5
r1 = 633.665 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 50.904 d2 = 2.71 nd2 =1.48749 νd2 =70.23
r3 = -97.884 d3 = 0.15
r4 = 20.036 (非球面) d4 = 3.27 nd3 =1.58913 νd3 =61.28
r5 = -424.570 (非球面) d5 = (可変)
r6 = -154.607 d6 = 0.85 nd4 =1.74320 νd4 =49.34
r7 = 7.037 (非球面) d7 = 3.13
r8 = -13.249 d8 = 0.65 nd5 =1.72916 νd5 =54.68
r9 = -400.246 d9 = 1.44 nd6 =1.92286 νd6 =20.88
r10= -31.893 d10= (可変)
r11= ∞(絞り) d11= 0.99
r12= -2601.620 d12= 1.14 nd7 =1.90366 νd7 =31.31
r13= -48.956 d13= 11.00
r14= ∞(仮想面) d14= (可変)
r15= 11.696 (非球面) d15= 4.30 nd8 =1.49700 νd8 =81.61
r16= -13.542 (非球面) d16= 0.15
r17= -186.492 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 18.191 d18= 1.76 nd10=1.67270 νd10=32.10
r19= 88.947 d19= (可変)
r20= 13.139 d20= 3.44 nd11=1.49700 νd11=81.61
r21= -22.439 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 12.447 d22= (可変)
r23= 37.219 d23= 2.40 nd13=1.58913 νd13=61.28
r24= -15.857 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -5.42983×10-6
A6 = 1.38492×10-8
A8 = -1.14651×10-10
A10= -1.84230×10-11
第5面
K = 0.000
A4 = 4.72650×10-6
A6 = 8.65089×10-8
A8 = -2.41488×10-9
A10= -1.57422×10-12
第7面
K = 0.000
A4 = -2.92122×10-4
A6 = 4.31976×10-6
A8 = -2.28965×10-7
A10= 3.36891×10-10
第15面
K = 0.597
A4 = -1.90173×10-4
A6 = 1.68973×10-6
A8 = -4.82919×10-8
A10= -2.13859×10-11
第16面
K = 0.000
A4 = 9.02659×10-5
A6 = 2.98286×10-6
A8 = -7.15741×10-8
A10= 4.04396×10-10
第24面
K = 0.000
A4 = 1.14189×10-4
A6 = -4.67268×10-6
A8 = 1.49193×10-7
A10= -1.97043×10-9
ズームデータ(∞)
WE ST TE
f (mm) 5.93 17.72 57.17
FNO 3.29 3.74 5.12
2ω(°) 66.47 22.63 7.27
d5 0.53 10.81 18.72
d10 15.11 4.51 0.49
d14 8.16 1.50 1.00
d19 0.71 4.07 8.96
d22 4.36 4.96 10.54
d24 8.85 11.58 1.57 。
【0057】
実施例6
r1 = 653.204 d1 = 1.22 nd1 =1.84666 νd1 =23.78
r2 = 45.090 d2 = 2.75 nd2 =1.48749 νd2 =70.23
r3 = -1318.530 d3 = 0.15
r4 = 17.489 (非球面) d4 = 3.89 nd3 =1.58913 νd3 =61.28
r5 = -89.343 (非球面) d5 = (可変)
r6 = -69.566 d6 = 0.85 nd4 =1.74320 νd4 =49.34
r7 = 5.831 (非球面) d7 = 3.24
r8 = -17.167 d8 = 0.65 nd5 =1.72916 νd5 =54.68
r9 = 36.171 d9 = 1.67 nd6 =1.92286 νd6 =20.88
r10= -70.564 d10= (可変)
r11= ∞(絞り) d11= 0.99
r12= 270.431 d12= 1.22 nd7 =1.80610 νd7 =40.92
r13= -40.685 d13= 10.30
r14= ∞(仮想面) d14= (可変)
r15= 10.699 (非球面) d15= 5.20 nd8 =1.49700 νd8 =81.61
r16= -9.876 (非球面) d16= 0.30
r17= -17.644 d17= 0.75 nd9 =1.88300 νd9 =40.76
r18= 43.893 d18= 1.92 nd10=1.67270 νd10=32.10
r19= -34.846 d19= (可変)
r20= 24.139 d20= 3.18 nd11=1.49700 νd11=81.61
r21= -14.346 d21= 0.70 nd12=1.90366 νd12=31.31
r22= 20.703 d22= (可変)
r23= 78.738 (非球面) d23= 2.44 nd13=1.58313 νd13=59.46
r24= -13.952 (非球面) d24= (可変)
r25= ∞ d25= 0.85 nd14=1.54771 νd14=62.84
r26= ∞ d26= 0.50
r27= ∞ d27= 0.50 nd15=1.51633 νd15=64.14
r28= ∞ d28= 0.60
r29= ∞(像面)
非球面係数
第4面
K = 0.000
A4 = -1.16015×10-5
A6 = -4.58545×10-8
A8 = -3.84761×10-10
A10= -3.35581×10-12
第5面
K = 0.000
A4 = 1.33373×10-5
A6 = -4.99311×10-8
A8 = -5.87507×10-10
A10= 1.02292×10-12
第7面
K = 0.000
A4 = -5.20765×10-4
A6 = -2.71776×10-6
A8 = -1.24289×10-7
A10= -1.36863×10-8
第15面
K = -0.134
A4 = -1.02927×10-4
A6 = 1.88604×10-6
A8 = -3.12601×10-8
A10= -5.20707×10-10
第16面
K = 0.000
A4 = 2.18544×10-4
A6 = 4.30526×10-6
A8 = -1.07154×10-7
A10= 6.47450×10-10
第23面
K = 0.000
A4 = -4.32618×10-4
A6 = 2.38110×10-5
A8 = -1.34005×10-6
A10= 2.83017×10-8
第24面
K = 0.000
A4 = -2.89557×10-4
A6 = 1.99791×10-5
A8 = -1.10217×10-6
A10= 2.24820×10-8
ズームデータ(∞)
WE ST TE
f (mm) 5.45 16.62 52.65
FNO 3.45 3.90 4.99
2ω(°) 71.40 24.07 7.92
d5 0.51 9.94 16.76
d10 14.78 5.07 1.03
d14 8.04 1.00 0.94
d19 1.38 4.23 8.75
d22 3.93 4.95 9.98
d24 8.25 11.41 1.93 。
【0058】
以上の実施例1〜6の無限遠物点合焦時の収差図をそれぞれ図7〜図12に示す。これらの収差図において、(a)は広角端、(b)は中間状態、(c)は望遠端における球面収差(SA)、非点収差(AS)、歪曲収差(DT)、倍率色収差(CC)を示す。各図中、"ω"は半画角を示す。
【0059】
上記実施例1〜6の条件式(1)〜(2)の値は次の通りである。
【0060】
実施例1 実施例2 実施例3 実施例4 実施例5 実施例6
(1)ft /f2 -8.72 -8.97 -9.00 -8.90 -8.03 -8.96
(2)ft /ftg12 -1.19 -1.42 -1.39 -1.34 -1.15 -1.32
。
【0061】
図13に、上記実施例3の変倍光学系において、第3レンズ群G3と第4レンズ群G4の間に光軸を略直角(例えば、90°)に屈曲させる表面反射ミラーRを光軸に対して45°の角度で配置した場合の広角端(a)と望遠端(c)での断面図を示す。他の実施例の変倍光学系においても同様である。
【0062】
次に、以上のような表面反射ミラーRを配置する本発明の変倍光学系の収納のための機械的構成の1例を図14に示す。図14(a)は光学系の撮影時の断面図であり、図14(b)はその収納時の断面図である。
【0063】
光軸を中心に外側から内側へ、第1レンズ枠11、第1カム枠14、第2レンズ枠12、第2カム枠15、第3レンズ枠13が同心に嵌合状態にある。第1レンズ群G1、第2レンズ群G2、及び、第3レンズ群G3がそれぞれ第1レンズ枠11、第2レンズ枠12、第3レンズ枠13に保持されている。開口絞りSは第3レンズ枠13に保持されている。そして、第1レンズ群G1、第2レンズ群G2、第3レンズ群G3それぞれは光軸方向への移動を案内するキーを備えている。
【0064】
第1カム枠14、第2カム枠15は、それぞれ下端外周面の一部が外枠16の内周面の一部と嵌合状態にあり、それぞれの下端外周面に配置されたカムピンと外枠16の内周面に設けられたカム溝とが係合している。
【0065】
また、外枠16の上面に抜け止め片32が紫外線硬化型等の接着剤で接着されている。そして、第1レンズ枠11の下部に突起31が設けられている。
【0066】
第1レンズ枠11は第1カム枠14の光軸方向移動に追従して光軸方向に移動するようい構成されている。
【0067】
また、第1カム枠14の内周面に設けられたカム溝と第2レンズ枠12の外周面に配置されたカムピンとが係合している。
【0068】
また、第2カム枠15の内周面に設けられたカム溝と第3レンズ枠13の外周面に配置されたカムピンとが係合している。
【0069】
そのため、第1カム枠14の回転に伴って第1レンズ枠11と第2レンズ枠12が所定軌跡で光軸方向に移動され、第2カム枠15の回転に伴って第3レンズ枠13が光軸方向の所定位置に移動される。そして、図14(a)に示された状態を保持するために、第1カム枠14と外枠16から第1レンズ枠11が飛び出さないように第1レンズ枠11の突起31は外枠16の抜け止め片32に当接して移動が規制されるように構成されている。
【0070】
第1カム枠14と第2カム枠15は図示されていないモータと連結されている。
【0071】
この第3レンズ枠13の直下には外枠16に設けられた捩じりばねと支持軸からなり、回動支点軸Pを持つ回動レバー17が配置されており、この回動レバー17に反射ミラーRが接合されている。
【0072】
そして、物体側から入射する光軸は、第3レンズ群G3の撮像素子側にある反射ミラーRによって約90゜折り曲げられて、第4レンズ群G4に入射する。外枠16の側面には第4レンズ群G4の光軸に対して垂直に開口部が設けられている。さらに、第4レンズ群G4と撮像素子Dとの間には、単独で光軸方向に移動する第5レンズ群G5、第6レンズ群G6が配置されている。
【0073】
上記モータの回転軸の回転がねじを介して係合部に伝わり、第1レンズ枠11、第2レンズ枠12及び第3レンズ枠13がキー軸に沿って移動する。なお、第1レンズ枠11及び第2レンズ枠12がキー軸に沿って移動するための駆動用のモータと、第3レンズ枠13がキー軸に沿って所定位置に移動するための駆動用のモータとは、別々に設けることもできる。
【0074】
このとき、収納時から撮影時や撮影時から収納時において、第4レンズ群G4、第5レンズ群G5及び第6レンズ群G6は外枠16の開口部から撮像素子D側に移動した状態において、第1カム枠14及び第2カム枠15が下降するようになっている。また、撮影時の状態において、第4レンズ群G4、第5レンズ群G5及び第6レンズ群G6は開口部よりも撮像素子D側に配置するようにしてもよい。さらに、第2カム枠15の内側の一部が回動レバー17に当接し、さらに第2カム枠15が下降し、回動レバー17の回動支点軸Pに付勢力が加わった状態でモータは停止する。
【0075】
以上が撮影時から収納時におけるズームレンズ(変倍光学系)の動作である。また、収納時から撮影時においては、モータの駆動軸を逆回転させて、第1カム枠14と第2カム枠15の移動が開始され、第1レンズ枠11、第2レンズ枠12及び第3レンズ枠13を収納状態から撮影状態に移動させる。外枠16の開口部の上面より上昇した状態に同期して、第4レンズ群G4、第5レンズ群G5及び第6レンズ群G6が撮影時の所定の位置に移動する。第1レンズ群G1、第2レンズ群G2及び第3レンズ群G3が撮影時の所望位置で停止すると、撮影時の状態となる。この構成と類似の技術は特許文献4の図1に記載されている。
【0076】
次に、第4レンズ群G4と第4レンズ枠18、第5レンズ群G4と第5レンズ枠19、及び、第6レンズ群G6と第6レンズ枠20との関係について説明をする。
【0077】
第4レンズ枠18は、ガイドシャフト21の一方が挿通支持する挿通孔とモータM1の回転軸であるネジ軸22に支持されている。これにより、モータM1が回転すると第4レンズ枠18が光軸に沿う方向に移動するようになっている。
【0078】
第5レンズ枠19、第6レンズ枠20は、ガイドシャフト21の一方が挿通支持する挿通孔とそれぞれモータM2、M3の回転軸であるネジ軸23、24に支持されている。これにより、それぞれモータM2、M3が回転すると、第5レンズ枠19、第6レンズ枠20が光軸に沿う方向に移動するようになっている。
【0079】
次に、撮影時の状態から収納状態への動作を説明する。第4レンズ群G4を支持する第4レンズ枠18と、第5レンズ群G5を支持する第5レンズ枠19と、第6レンズ群G6を支持する第6レンズ枠20が撮像素子D側に移動した後に停止する。このとき、移動開始時は、第4レンズ枠18が外枠16から左側に移動した後に、第1レンズ枠11、第1カム枠14等が下降し、これらの枠と衝突しないようにする。
【図面の簡単な説明】
【0080】
【図1】本発明の実施例1の変倍光学系の光路を展開した無限遠物点合焦時の広角端(a)、中間状態(b)、望遠端(c)でのレンズ断面図である。
【図2】本発明の実施例2の変倍光学系の図1と同様のレンズ断面図である。
【図3】本発明の実施例3の変倍光学系の図1と同様のレンズ断面図である。
【図4】本発明の実施例4の変倍光学系の図1と同様のレンズ断面図である。
【図5】本発明の実施例5の変倍光学系の図1と同様のレンズ断面図である。
【図6】本発明の実施例6の変倍光学系の図1と同様のレンズ断面図である。
【図7】実施例1の無限遠物点合焦時の広角端(a)、中間状態(b)、望遠端(c)での収差図である。
【図8】実施例2の図7と同様の収差図である。
【図9】実施例3の図7と同様の収差図である。
【図10】実施例4の図7と同様の収差図である。
【図11】実施例5の図7と同様の収差図である。
【図12】実施例6の図7と同様の収差図である。
【図13】実施例3の変倍光学系の光軸を90°屈曲させる場合の広角端(a)と望 遠端(c)での断面図である。
【図14】本発明の変倍光学系の収納のための機械的構成の1例を示す図である。
【符号の説明】
【0081】
G1…第1レンズ群
G2…第2レンズ群
G3…第3レンズ群
G4…第4レンズ群
G5…第5レンズ群
G6…第6レンズ群
S…開口絞り
F…光学的ローパスフィルター
C…CCDのカバーガラス
I…CCDの像面
R…反射ミラー
P…回動支点軸
D…撮像素子
M1、M2、M3…モータ
11…第1レンズ枠
12…第2レンズ枠
13…第3レンズ枠
14…第1カム枠
15…第2カム枠
16…外枠
17…回動レバー
18…第4レンズ枠
19…第5レンズ枠
20…第6レンズ枠
21…ガイドシャフト
22、23、24…ネジ軸
31…突起
32…抜け止め片
【特許請求の範囲】
【請求項1】
物体側から順に、正の屈折力を有する第1レンズ群と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群と、シャッタ及び開口絞りを有する変倍時に固定の正の屈折力を有する第3レンズ群と、正の屈折力を有する第4レンズ群と、負の屈折力を有する第5レンズ群とを有し、以下の条件式を満足することを特徴とする変倍光学系。
−10<ft /f2 <−7 ・・・(1)
−1.8≦ft /ftg12≦−0.92 ・・・(2)
ただし、ft は望遠端での全系の焦点距離、
f2 は第2レンズ群の焦点距離、
ftg12は望遠端における第1レンズ群と第2レンズ群の合成焦点距離、
である。
【請求項2】
正の屈折力を有する第3レンズ群の撮像面側に光軸を略直角に屈曲させる反射部材を有することを特徴とする請求項1記載の変倍光学系。
【請求項3】
前記反射部材は表面反射ミラーからなることを特徴とする請求項2記載の変倍光学系。
【請求項4】
請求項1から3の何れか1項記載の変倍光学系と、その変倍光学系の像側に配され、光学像を電気信号に変換する撮像素子とを備えたことを特徴とする撮像装置。
【請求項5】
前記変倍光学系と前記撮像素子との間にローパスフィルターを配置したことを特徴とする請求項4記載の撮像装置。
【請求項1】
物体側から順に、正の屈折力を有する第1レンズ群と、負の屈折力を有し変倍時に最も大きな変倍効果を有する第2レンズ群と、シャッタ及び開口絞りを有する変倍時に固定の正の屈折力を有する第3レンズ群と、正の屈折力を有する第4レンズ群と、負の屈折力を有する第5レンズ群とを有し、以下の条件式を満足することを特徴とする変倍光学系。
−10<ft /f2 <−7 ・・・(1)
−1.8≦ft /ftg12≦−0.92 ・・・(2)
ただし、ft は望遠端での全系の焦点距離、
f2 は第2レンズ群の焦点距離、
ftg12は望遠端における第1レンズ群と第2レンズ群の合成焦点距離、
である。
【請求項2】
正の屈折力を有する第3レンズ群の撮像面側に光軸を略直角に屈曲させる反射部材を有することを特徴とする請求項1記載の変倍光学系。
【請求項3】
前記反射部材は表面反射ミラーからなることを特徴とする請求項2記載の変倍光学系。
【請求項4】
請求項1から3の何れか1項記載の変倍光学系と、その変倍光学系の像側に配され、光学像を電気信号に変換する撮像素子とを備えたことを特徴とする撮像装置。
【請求項5】
前記変倍光学系と前記撮像素子との間にローパスフィルターを配置したことを特徴とする請求項4記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】

【図10】

【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−150499(P2012−150499A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2012−57402(P2012−57402)
【出願日】平成24年3月14日(2012.3.14)
【分割の表示】特願2006−286008(P2006−286008)の分割
【原出願日】平成18年10月20日(2006.10.20)
【出願人】(504371974)オリンパスイメージング株式会社 (2,647)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成24年3月14日(2012.3.14)
【分割の表示】特願2006−286008(P2006−286008)の分割
【原出願日】平成18年10月20日(2006.10.20)
【出願人】(504371974)オリンパスイメージング株式会社 (2,647)
【Fターム(参考)】
[ Back to top ]