
変化領域認識装置および変化認識システム
【課題】 リアルタイムに変化領域を抽出し、GISデータベースを更新できるようにすることを目的とする。
【解決手段】 環境変化認識システム10においてGISデータベース300は教師データ記憶部320に元になるGISデータ(教師データ)を記憶する。センサ200は距離画像を撮像し認識装置100に出力する。認識装置100では、GISモデル作成部110で距離画像に対応するGISモデルデータを作成する。次に、変化領域抽出部120で教師データとGISモデルデータとを比較して変化領域を抽出し、抽出した変化領域内の物体の輪郭を抽出する。次に、物体認識部130で形状データ記憶部140に記憶された各形状データと抽出した物体の輪郭とを比較して物体を認識する。そして、物体のGISデータをGISデータベース300に反映する。
【解決手段】 環境変化認識システム10においてGISデータベース300は教師データ記憶部320に元になるGISデータ(教師データ)を記憶する。センサ200は距離画像を撮像し認識装置100に出力する。認識装置100では、GISモデル作成部110で距離画像に対応するGISモデルデータを作成する。次に、変化領域抽出部120で教師データとGISモデルデータとを比較して変化領域を抽出し、抽出した変化領域内の物体の輪郭を抽出する。次に、物体認識部130で形状データ記憶部140に記憶された各形状データと抽出した物体の輪郭とを比較して物体を認識する。そして、物体のGISデータをGISデータベース300に反映する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GISデータを利用して変化領域を認識する変化領域認識装置および変化認識システムに関するものである。
【背景技術】
【0002】
三次元GIS(Geographic Information System)は、従来の2次元地図の拡張として考えられ、主に測量・地図メーカによって発展されてきた。現在そのような分野では、広範囲の地図の作成に、航空機からの写真撮影によって情報を収集する手法が一般的であり、三次元GISの作成に関しても、航空機からの写真撮影やレーザレーダにより、建物の高さの測定が行われてきた(特許文献1,特許文献2)。航空機からの情報収集は一度に広大な範囲を測定することが可能であり、地形の計測や、ビル等の大型建造物の形状データを比較的容易に得ることができる。
【0003】
また、三次元GISは、実世界の空間情報をデータベースとしてモデル化したものである。物体をオブジェクトとして扱い、従来の地図で表される2次元座標に加え、高さ情報や時間変化、所有者など様々な属性情報を付与することが可能であり、地図で一般的に表現される建造物等の固定物だけではなく、固定物の破損や時間変化、人や車といった移動体についても「何が」「いつ」「どこに」存在したかということを表すことができる。また、データベースとなっていることでオブジェクトの条件検索や、要素の演算が可能であり、必要とされるデータを容易に作製することができる。
つまり、空間情報をGISデータベースに統合・管理し、必要な情報をシミュレータによって仮想空間上に再現することで、広大な実世界の状況を容易に、素早く把握することが可能となり、監視や警備の自動化や、災害発生時の初期状況把握に対して有効であると考えられる。
【特許文献1】特開2003−323640号公報
【特許文献2】特開2002−328021号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで現在、三次元GISデータを教師データとして、固定センサまたは移動センサを用いて状況の変化を捉え、監視・警備業務を自動化しようというニーズがある。例えば、駐車場における駐車状況の把握や、工場などの進入規制のある場所に対する人の出入りの監視、山崩れの危険のある場所の監視、都市部における大震災後の震災総合シミュレータへの適応などである。これらの業務は従来、人間の目によって絶え間なく監視することで対応されてきた。しかし、人間は疲れなどで見逃す可能性があり、その精度には限界があった。
【0005】
現在の三次元GISは、従来の2次元地図と同様に、ある時点で作成したモデルは時々刻々と変化する実世界を追従することができない。このため、時間の経過と共にデータベースとしての価値を失ってしまっていた。つまり、更新の頻度がデータベースの価値を決定し、特に監視や警備の用途においてはほぼリアルタイムでのデータベース更新が必要となる。しかし、三次元GISの作成には2次元地図よりもはるかに膨大なデータを取得する必要があり、そのデータ処理にも多大なる作業が発生するため、容易には行えない。そのため、年単位でのデータベース更新が一般的であり、監視・警備用途で必要となるような、リアルタイムでの変化域の抽出とデータベースの更新は行われていない。また、データベース化される対象も固定物に限定されている。
【0006】
本発明は、上記の課題などを解決するためになされたもので、例えば、リアルタイムに変化領域を抽出できるようにすることを目的とする。
また、リアルタイムにGISデータベースを更新できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の変化領域認識装置は、特定領域を示す第1の領域データと任意の時刻における前記特定領域を示す第2の領域データとを入力し、入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを前記特定領域内の変化領域を示す変化領域データとして特定する変化領域特定部と、前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部とを備えたことを特徴とする。
【発明の効果】
【0008】
本発明によれば、第1の領域データと第2の領域データとを誤差領域を用いて比較することで的確に変化領域を抽出することができる。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
三次元GISを監視・警備用途に使用することを考えると、従来のGISデータ更新方法において幾つかの問題が明確になる。まず、測定位置が上空であることである。上空からの測定では、地面や屋根といった水平面の計測がしやすい反面、壁面などの垂直面や屋根の下などの陰になる部分に対してほとんど計測できない。また、人や車両など地形に比べると格段に小さな物体を対象とすることは、今後のセンサの解像度向上や計算機の画像処理能力の向上を考慮しても困難である。また、データ取得から解析処理に時間がかかり、データベースの更新には数ヶ月から数年単位、短くても数日を要していた。このため、人や車両といった移動体をデータベース化したり、変化が起こった時を捉えたりといった用途には使用できなかった。
【0010】
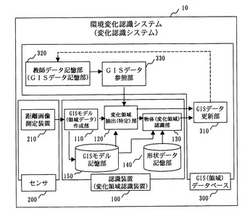
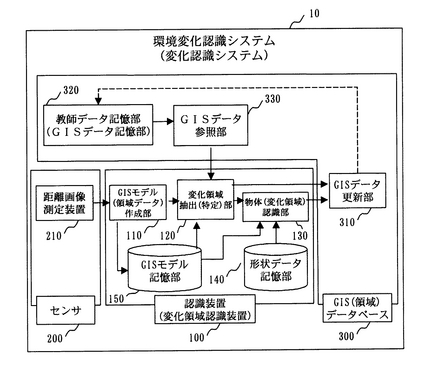
図1は、実施の形態1における環境変化認識システム10の構成図である。
人や車両を含む変化領域の抽出と、抽出した変化領域のGISデータベースへの反映とをリアルタイムに行うための環境変化認識システム10の構成について、図1に基づいて以下に説明する。
【0011】
環境変化認識システム10は、距離画像の計測を行う一つ以上のセンサ200(図1ではセンサ200を一つだけ図示する)と、センサ200の計測結果を解析処理する認識装置100と、GISデータを管理、更新するGISデータベース300とを備える。それぞれの間はデータ通信回線で接続されている。
【0012】
センサ200は、周囲の環境を計測し距離画像の取得を行う距離画像測定装置210を備える。距離画像測定装置210は、例えばレーザレーダやステレオ視カメラ等の画像データ取得部とデータ処理部を備えて構成される。
ここでセンサ200は、測定対象(領域や物体)を計測できるように配置されているものとする。例えば、測定対象の3方(前方、後方、側面)を撮像できるようにして2ヶ所以上に配置してもよいし、自己位置標定装置(例えばRTK−GPS/INS:RealTime Kinematic−Global Positioning System/Inertial Navigation System)(図示しない)を備えて自己位置を取得する1つのセンサ200を配置し、測定対象の周辺を移動してもよい。
【0013】
以下、センサ200が、360度全周囲の撮像が可能なODV(Omni−Directional Vision)により距離画像を取得する距離画像測定装置210と、RTK−GPS/INSにより自己位置を測位する自己位置標定装置(図示しない)とを備える場合について説明する。このとき、自己位置を測位できるセンサ200は測位対象の周辺を移動する。
RTK−GPS/INSによる測位をする場合、センサ200は、数センチの精度でリアルタイムに自己の位置・姿勢の計測が可能になる。また、ODVにより撮像する場合、センサ200は、計測した位置・姿勢のデータと同期のとれた全周画像を取得することが可能になる。そして、RTK−GPS/INSの計測データから求められるODVの位置(ODVの円筒形状を成す仮想撮像面の中心位置)・姿勢(ODVの仮想撮像面の中心を原点とする局所空間座標系の基準座標軸の方向)や移動速度などの運動パラメータと、センサ200の移動に伴ない複数地点でODVにより取得した全周画像とを用いて、距離画像測定装置210のデータ処理部でエピポーラ拘束や視差を求めるモーションステレオ視の方法により距離画像を取得する。
例えば、異なる二地点でRTK−GPS/INSの計測データからODVの位置・姿勢の6自由度を推定し、これを拘束条件としてODVの全周画像の全画素に関するエピポーラ拘束(移動に伴なうODVの各位置とODVの注視点とが存在する平面であるエピポーラ平面、及びエピポーラ平面がODVの仮想撮像面と交差するエピポーラ線等の幾何学的な拘束条件)を求める。このエピポーラ拘束に従い、異なる二地点でそれぞれ得られた全周画像(仮想撮像面)上で、同一対象物(二地点の全周画像上で互いに対応する注視点)の画像を特定する(マッチングを取る)。特定した各画像を用いてモーションステレオ視の原理によって視差によって対象物までの距離と方向を求め、当該距離と方向に存在する画像の画像情報を求めて、距離画像を得る。この距離画像を用いて各画像の三次元モデルを構築することによって、密なテクスチャ付き三次元モデルの作成が可能になる。
さらに、360度全周囲の画像を自己位置/姿勢と同期して取得できるため、走行中のデータ取得が可能である他、車体動揺による姿勢角の補正も可能になる。また、ステレオ視演算の相関を取る画像を変え、ベースラインを自由に変えることで、距離画像精度を上げることが可能になる。
【0014】
ここで、距離画像とは、センサ200からセンサ200のセンシング範囲にある測定対象までのベクトルデータと画像データから構成されるデータのことである。このベクトルデータは、センサ200から測定対象を構成する各点までのベクトルを示し、センサ座標系で表現される。また、この画像データはセンサ200が取得した測定対象の画像における1画素もしくは数画素分の色情報や階調情報等で構成される。距離画像は測定対象を構成する各点毎のデータを集合させた点列データとして得られる。
なお、レーザレーダで距離画像を取得する場合は、レーザの出力光が物体で反射して戻ってくるまでの時間を計測して距離を算出した後、レーザの出力方向を変動させる。レーザの出力方向と上記算出された距離とを逐次計測し、この計測値を集積することによって物体の三次元形状を測定する。
【0015】
認識装置100はGISモデル作成部110と変化領域抽出部120と物体認識部130と形状データ記憶部140とGISモデル記憶部150とを備える。
GISモデル作成部110では、センサ200が取得した測定対象の距離画像と位置情報とを入力して三次元GISモデルデータを作成する。センサ200が複数存在する場合は、測定対象を測定した複数のセンサ200のデータを入力して一つの三次元GISモデルデータを作成する。そして、作成した三次元GISモデルをGISモデル記憶部150に記憶する。三次元GISモデル(以下、三次元モデルデータとする)とは、センサ200の取得した点列データをセンサ座標系から任意の座標系に変換したデータであり、三次元の領域を示すデータである。
なお、任意の座標系としては、各地域毎に設定された基準座標系を用いても良いし、特定の施設や領域内で固定された局所的な基準座標系を用いても良い。
変化領域抽出部120では、GISモデル作成部110が作成した三次元モデルデータとGISデータベース300であらかじめ管理されている三次元GISデータとを比較する。そして、GISデータベース300の三次元GISデータを教師データとしてGISモデル作成部110が作成した三次元モデルデータの差異を抽出し、抽出した差異部分を変化領域とする。そして、変化領域内に存在する新たな物体を抽出する。つまり、変化要因である物体(変化領域)を特定する。GISモデル作成部110とGISデータベース300は共通の座標系を参照する。
形状データ記憶部140には、各種物体の「形状」、「大きさ」の情報(形状データ)を記憶しておく。
物体認識部130では、変化領域抽出部120が抽出した変化領域内の新たな物体の「形状」、「大きさ」をキーとして形状データ記憶部140を検索し、対応する物体を判定する。つまり、変化を引き起こしたのがどのような状況によるものかの認識を行う。
【0016】
GISデータベース300は教師データ記憶部320とGISデータ更新部310とGISデータ参照部330とを備える。
教師データ記憶部320は三次元GISデータ(教師データ)を時刻と共に記憶する。三次元GISデータとは、三次元の領域を示すデータである。
GISデータ更新部310は、認識装置100で認識した物体の発失を教師データ記憶部320に登録する。つまり、GISデータ更新部310がセンサ200の計測の状況をデータベースに反映することで、現在の状況へと更新する。
GISデータ参照部330は、測位対象に関する情報(位置情報や名称)を入力し、対応する教師データを教師データ記憶部320から取得して出力する。つまり、センサ200の前回の測定時の教師データを認識装置100に出力する。
三次元GISデータ(教師データ)では、測定対象となった建物や構造物等の立体形状を有する物体毎に、各物体を互いに識別するための識別番号が割当てられている。三次元GISデータは、例えば複数の点(ノード)と各ノードを接続する接続ラインから構成されて、接続ラインが立体的な形状を成す。
【0017】
以下、時空間GISとして知られるKIWI+を使用する場合について説明する。
KIWI+のデータフォーマットは、建物等の物体をベクトルと画像テクスチャ等の属性で表現している。そこで認識装置100は、センサ200がステレオ視で得た三次元の点列データから面抽出を行い、面の各頂点を求めベクトル化し、得られた面にODV画像の対応テクスチャを貼付け、専用API(Application Program Interface)(GISデータ更新部310のインタフェース)を介してKIWI+データベース(GISデータベース300)の更新を行う。
【0018】
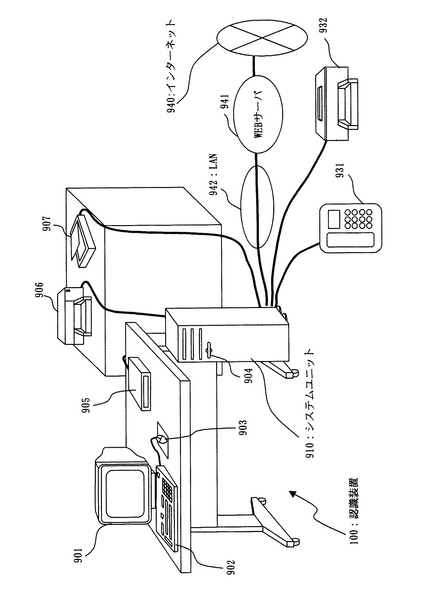
図2は、実施の形態1における認識装置100の外観を示す図である。
図2において、認識装置100は、システムユニット910、CRT(Cathode Ray Tube)表示装置901、キーボード(K/B)902、マウス903、コンパクトディスク装置(CDD)905、プリンタ装置906、スキャナ装置907を備え、これらはケーブルで接続されている。
さらに、認識装置100は、FAX機932、電話器931とケーブルで接続され、また、ローカルエリアネットワーク(LAN)942、ウェブサーバ941を介してインターネット940に接続されている。
【0019】
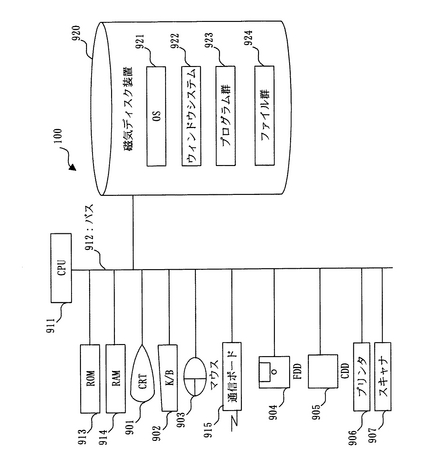
図3は、実施の形態1における認識装置100のハードウェア構成図である。
図3において、認識装置100は、プログラムを実行するCPU(Central Processing Unit)911を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915、CRT表示装置901、K/B902、マウス903、FDD(Flexible Disk Drive)904、磁気ディスク装置920、CDD905、プリンタ装置906、スキャナ装置907と接続されている。
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、磁気ディスク装置920、光ディスク装置は、不揮発性メモリの一例である。これらは、記憶装置あるいは記憶部の一例である。
通信ボード915は、FAX機932、電話器931、LAN942等に接続されている。
例えば、通信ボード915、K/B902、スキャナ装置907、FDD904などは、情報入力部の一例である。
また、例えば、通信ボード915、CRT表示装置901などは、出力部の一例である。
【0020】
ここで、通信ボード915は、LAN942に限らず、直接、インターネット940、或いはISDN等のWAN(ワイドエリアネットワーク)に接続されていても構わない。直接、インターネット940、或いはISDN等のWANに接続されている場合、認識装置100は、インターネット940、或いはISDN等のWANに接続され、ウェブサーバ941は不用となる。
磁気ディスク装置920には、オペレーティングシステム(OS)921、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923は、CPU911、OS921、ウィンドウシステム922により実行される。
【0021】
上記プログラム群923には、実施の形態の説明において「〜部」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、実施の形態の説明において、「〜判定し」、「〜を判定した結果」、「〜を計算し」、「〜を計算した結果」、「〜を処理し」、「〜を処理した結果」のような表現で説明する結果情報が、「〜ファイル」として記憶されている。
また、実施の形態の説明において説明するフローチャートの矢印の部分は主としてデータの入出力を示し、そのデータの入出力のためにデータは、磁気ディスク装置920、FD(Flexible Disk cartridge)、光ディスク、CD(コンパクトディスク)、MD(ミニディスク)、DVD(Digital Versatile Disk)、その他の記録媒体に記録される。あるいは、信号線やその他の伝送媒体により伝送される。
【0022】
また、実施の形態の説明において「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、ハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。
【0023】
また、実施の形態を実施するプログラムは、磁気ディスク装置920、FD、光ディスク、CD、MD、DVD、その他の記録媒体による記録装置を用いて記憶されても構わない。
【0024】
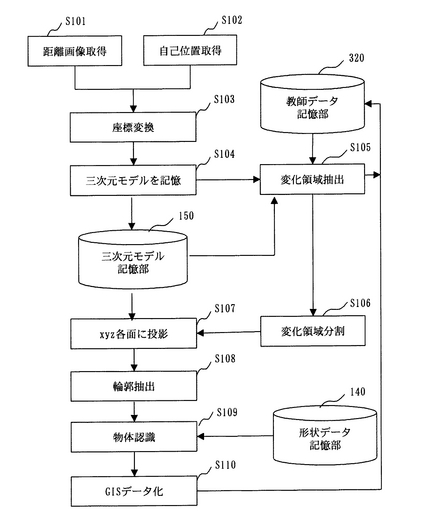
図4は、実施の形態1における環境変化認識システム10の処理の流れを示すフローチャートである。
環境変化認識システム10において、まず、センサ200は距離画像測定装置210(全周撮像装置:ODV)から距離画像を取得すると共に撮像した位置の情報を取得する(S101〜S102)。次に、GISモデル作成部110は取得した距離画像と位置情報とに基づいて距離画像の三次元モデルデータを生成する(S103〜S104)。生成された三次元モデルデータは一旦メモリに格納される。
次に、変化領域抽出部120は三次元モデルデータと教師データを、三次元空間上で投票処理して変化領域を抽出する。抽出した変化領域において物体が消失している場合、GISデータ更新部310は、消失した物体(の存在位置・存在領域)に対応する教師データを更新する。GISモデルデータには、その識別番号に対応付けられて消失した物体の消失時間を示す消失時間フラグ、新たに生成した物体の生成時間を示す生成時間フラグ等の、属性データの記憶領域が設定されている。
例えば、教師データ記憶部320から、三次元モデルデータ中で消失した物体に対応するGISモデルデータを参照し、参照されたGISモデルデータに対して消失した物体の消失時間を示す消失時間フラグを設定する。(S105)。
次に、変化領域抽出部120は抽出した変化領域において新たな物体が発生している場合、クラスタリング処理をして変化領域の分割を行い、発生した新たな物体(以下、変化領域の物体とする)を抽出する(S106)。
次に、変化領域の物体の三次元モデルをXYZ各面に投影し(S107)、変化領域の物体の輪郭を抽出する(S108)。
次に、物体認識部130は抽出した物体の輪郭と形状データ記憶部140に記憶された物体の形状データとを比較し、変化領域の物体の認識を行う(S109)。そして、GISデータ更新部310は認識した物体を教師データ記憶部320に反映させる(S110)。
【0025】
環境変化認識システム10は、このようなフローにより、作成した三次元モデルから、環境の変化の認識とGISデータベース300の更新作業を自動的に行うことで、教師(GIS)データの更新範囲を小さくし、環境の変化をリアルタイムに捉えることができる。
【0026】
次に、図4に示すフローチャートの各処理の詳細について以下に説明する。
ここでは、教師(GIS)データに存在しない駐車車両を変化領域の物体として抽出する例で説明を行う。
【0027】
まず、S101〜S104の処理について説明する。
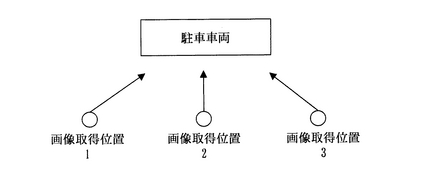
図5は、実施の形態1における距離画像取得(S101)の方法を示す図である。
センサ200は、図5に示すように、車両脇を画像取得位置1から画像取得位置3に移動して車両の前後、道路側の側面からの距離画像を取得する(S101)。また、距離画像を取得時に距離画像を取得した位置をGPS/INSにより測位する(S102)。
GISモデル作成部110は、センサ200から距離画像(点列データ)と位置情報とを取得する。そして、位置情報に対してセンサ200のセンサ座標系から教師データ記憶部320に記憶されるGISデータの座標系に座標変換を行う(S103)。
GISモデル作成部110は、距離画像を座標変換した位置情報に対応させて、X座標値、Y座標値、Z座標値と色情報(RGB:Red−Green−Blue)とを持つ点列データ(三次元モデルデータ)をGISモデル記憶部150に記憶する(S104)。
【0028】
次に、S105の処理について説明する。
三次元モデルデータを生成する際に行ったODVの測定と、教師データ記憶部320の教師(三次元GIS)データを生成する際に行った測定では測定環境が異なる。つまり、三次元モデルデータと教師データとでは誤差が生じるため、重複するデータを消去することで差分をとることができない。そこで、変化領域抽出部120は、まず、GISモデル記憶部150から、新たに生成された三次元モデルデータを取得する。次に、取得した三次元モデルの位置情報をGISデータ参照部330に出力する。GISデータ参照部330は、教師データ記憶部320から位置情報の示す位置に対応する教師データを取得して変化領域抽出部120に出力する。そして変化領域抽出部120は、生成された三次元モデルデータと、教師データを用いて投票処理を行い、変化領域を抽出する(S105)。
【0029】
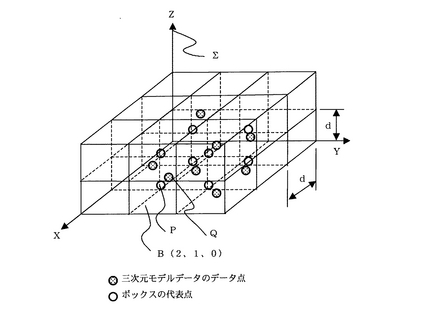
図6、図7は、実施の形態1における変化領域の抽出(S105)時の投票処理方法を示す図である。
投票処理について、図6、図7に基づいて以下に説明する。
まず、三次元GISデータの座標系(Σ)に沿って、空間を特定の間隔dで区切ることで、空間を複数の小空間(ボクセル空間。以下、単にボックスと呼ぶ)に区分けする。各ボックスを、例えば三次元の配列データ(i,j,k)で番号付けする。
次に、センサ200の取得画像から三次元モデルデータを生成する。三次元モデルデータの各データ点(ノード)について、どのボックス内にそのデータ点の座標が存在するのかを識別する。例えば図6の例に示すように、上記ボックスのうち、そのデータ点の座標Q(2.3、1.5、0.3)が内部に含まれるボックスBを、データ点を有した(2、1、0)番の配列のボックスとしてカウントする(投票処理する)。このボックスの投票処理により、三次元モデルデータの各データ点の集合を、ボックスの集合(ボックスが繋がって形成される集合体)に捉え直して表現する。なお、データ点の座標からボックスの配列を求める際は、図の例のように単に座標値を四捨五入するなど、簡便な方法を用いて求めると、演算量を軽減することができる。
また、データ点が含まれるボックスの座標として、そのボックスの代表点P(中心点など)を採用し、その代表点を用いて以下のように誤差判定を行う。
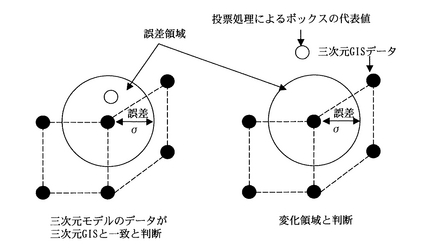
投票処理の結果得られるボックスの代表点を、各代表点に一定の誤差σを持たせた球状の領域の集合として、この代表点と教師(三次元GIS)データと比較する。
図7左図のように、三次元GISデータを構成する各点(黒丸)の誤差領域内にボックスモデルデータを構成する代表点(白丸)が存在する場合は、この代表点を有するボックスモデルデータが三次元GISデータと同一と判定し、このボックスモデルデータを切り捨てる。
図7右図のように、三次元GISデータの誤差領域内にボックスモデルデータを構成する代表点が存在しない場合は、このボックスモデルデータが変化領域の一部を示すデータであると判断して、この代表点に連結したボックスモデルデータを整理する。
【0030】
ここで、ボックスモデルデータの各代表点に持たせる誤差は以下のように求める。
代表点の測定値が複数ある場合、加重平均をして測定値の最良推定値を求める。以下、ある量XについてN個の測定値があるものとする(式1)。
【0031】
【数1】

【0032】
式1において、σ1,σ2,・・・σNはそれぞれの誤差、つまり標準偏差である。以下に標準偏差の算出方法を示す。
【0033】
最良推定値は加重平均Xwavの計算式を式2に示す。
【0034】
【数2】
【0035】
ここで、和はN個すべての測定値にまたがり、i=1,2,・・・Nである。
また、Wiは式3のように定義される重みであり、それぞれの誤差の逆数の二乗である。
【0036】
【数3】
【0037】
以上より、求める誤差σiは式4で示すことができる。
【0038】
【数4】
【0039】
次に、S106(図4)の処理について説明する。
S105で抽出した変化領域はそれぞれ特定の体積を持つボックスであるが、変化をもたらしたものは何らかの形状を持つ物体である。
よって、この変化の生じた変化ボックスを、変化領域として認識する必要がある。
そこで、変化領域の分割(S106)の処理では、互いの間隔が一定範囲内にある隣接したボックスをまとめて、ひとつの変化領域として認識する。
これをクラスタリングと呼ぶ。
その手順は以下のとおりである。
(1)低密度部分の消去
ボックスのカウント数がしきい値以下となるボックスの、カウント値を0とする。
(2)領域化
所定のボックスに囲まれたカウント値0のボックスに対し、高いカウント値を設定することで領域化する。
(3)ノイズの削除
まとまったボックス集合体の、領域体積の小さい領域(ノイズ領域)を削除する。
S105で抽出した変化領域内には、複数の物体を含んでいる場合が考えられ、それらを個別に認識する必要がある。そこで変化領域の分割(S106)では、クラスタリング処理で変化領域を物体毎に分割している。クラスタリング処理とは、変化領域をボックスが連結する各部分に分割し、分割した各部分が別の物体を構成するものか同一の物体を構成するものかを判定して同一の物体を構成する部分をグループ化する処理のことである。
【0040】
次に、S107(図4)の処理について説明する。
変化領域抽出部120は、S106で分割した各変化領域の三次元モデルデータをX、Y、Zの各平面に投影する。例えば、VRMLや点密度で三次元モデルデータを各平面に投影する。
【0041】
次に、S108の処理について説明する。
変化領域抽出部120は、S107で各変化領域の三次元モデルデータを投影した各平面のデータに基づいて物体の輪郭を抽出する。例えば、曲線、曲面を抽出してもよいし、前出の直線近似により輪郭を抽出してもよい。
【0042】
ここで、輪郭抽出のための前処理として、以下に変化領域の分割の詳細について説明する。
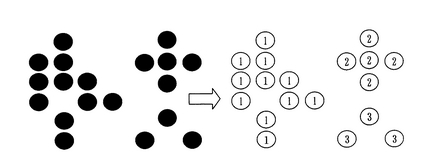
図8は、実施の形態1におけるS108で実施される変化領域の分割を示す図である。
図8において、左図が分割前の変化領域であり、右図が分割後の変化領域である。右図は、左図の変化領域をラベル1で示す領域、ラベル2で示す領域、ラベル3で示す領域に分割した場合を示している。
【0043】
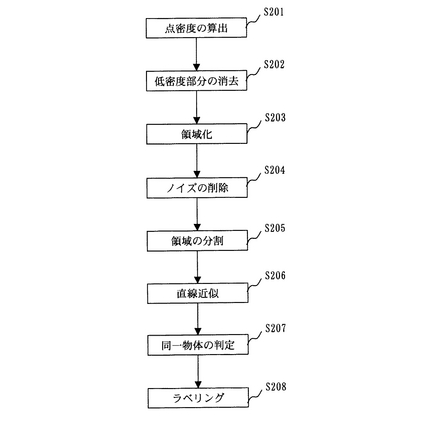
図9は、この変化領域の分割処理のフローチャートである。
図8に示す変化領域の分割を行うために変化領域抽出部120は図9に示す処理を行う。
図9において、S201〜S207の処理がクラスタリング処理であり、S208の処理がラベリング処理である。
【0044】
まず、S107で処理された、変化領域の三次元モデルデータ(距離画像から作成された点データの集合)のY平面への投影データについて、Y平面における変化領域を区分し、各区分の点密度を算出する(S201)。
【0045】
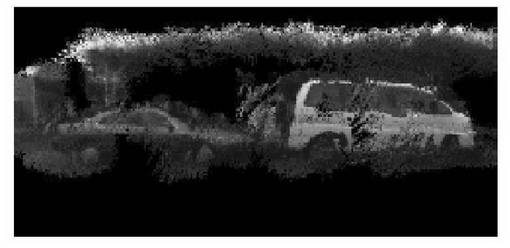
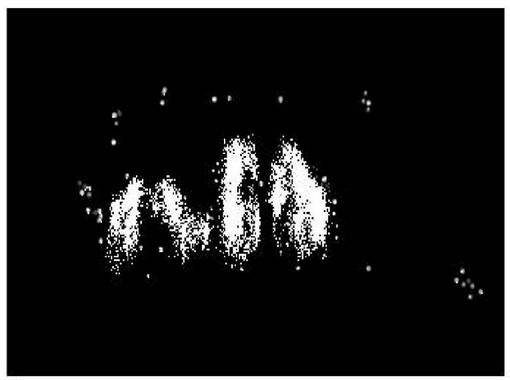
図10は、実施の形態1における変化領域(駐車車両)のY平面投影図(VRML)である。
図10では、抽出された変化領域の駐車車両(2台)の三次元モデルデータをVRML(Virtual Reality Modeling Language)フォーマットでY平面(ここでは、車両の側面)に投影したものを示している。
【0046】
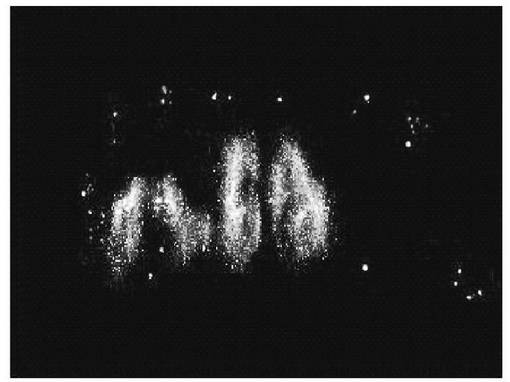
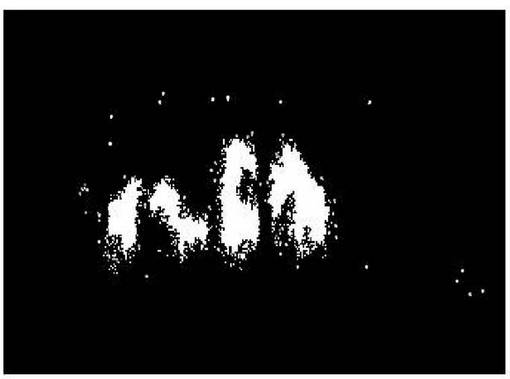
図11は、実施の形態1における変化領域(駐車車両)のY平面投影図(点密度)である。
図11では、図10で示した駐車車両を、1cm2あたりの三次元モデルの点密度で示している。つまり、1cm2内に点データが有る場合、その1cm2を1つの点で示す。また、その1cm2内に存在する点の数(点密度)が多い場合と少ない場合とで色を変える。
図11は、横視差ステレオで距離画像を取得し三次元モデルを作成した場合のY平面投影図であるが、横視差ステレオは、ベースラインと平行する横エッジの感度が低いため、横エッジが少ない車両の側面には測定できなかった部分(点データが無い部分または点密度が低い部分)が生じている。
【0047】
図9において、次に、点密度の低い部分のデータを削除する(S202)。
【0048】
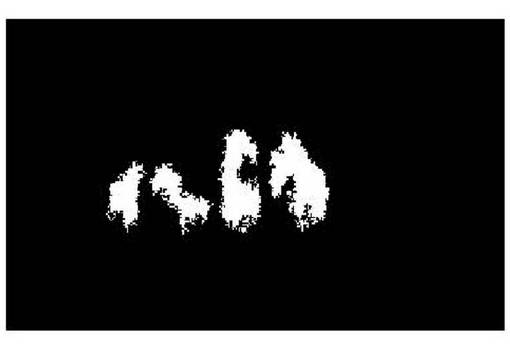
図12は、実施の形態1における変化領域(駐車車両)のY平面投影図(低密度部分削除後)である。
図12では、図11で示した駐車車両に対する点密度のうち、点密度が10未満の部分を削除したものを示している。
【0049】
図9において、次に、高い点密度部分に囲まれた点密度が0の部分(S202で削除された点密度の低い部分を含む)のデータに高い点密度を設定して、一つの高い点密度の領域にする(S203)。
【0050】
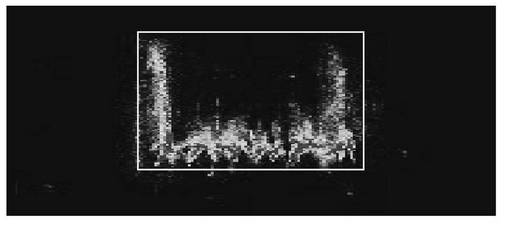
図13は、実施の形態1における変化領域(駐車車両)のY平面投影図(領域化後)である。
図13では、図12で示した駐車車両に対する点密度のうち、高い点密度部分に囲まれた隙間を埋めて領域化したものを示している。
【0051】
図9において、次に、面積が小さい点密度の領域(ノイズ)のデータを削除する(S204)。
【0052】
図14は、実施の形態1における変化領域(駐車車両)のY平面投影図(ノイズ削除後)である。
図14では、図13で示した駐車車両に対する点密度の領域のうち、領域面積が10(cm2)以下の領域を削除したものを示している。
【0053】
図9において、次に、変化領域のデータをS204までで処理した点密度の各領域のデータに対応させて分割する(S205)。
【0054】
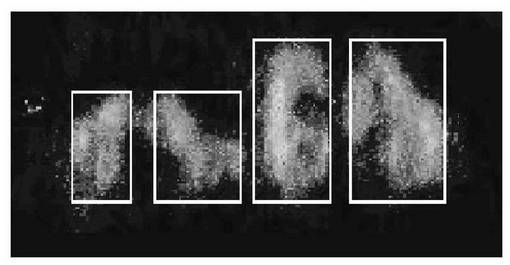
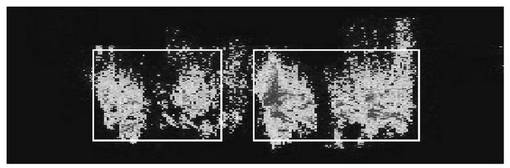
図15は、実施の形態1における変化領域(駐車車両)のY平面投影図(分割後)である。
図15では、図14で示した駐車車両に対する四角形で近似した各領域で変化領域を分割したものを示している。図15において、変化領域の2台の駐車車両はそれぞれ車体の前部と後部とに分割されている。
【0055】
図9において、次に、点密度の各領域のデータを最小二乗法により直線近似する(S206)。
【0056】
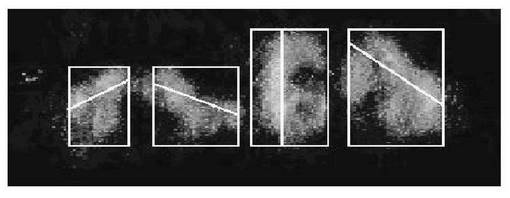
図16は、実施の形態1における変化領域(駐車車両)のY平面投影図(直線近似後)である。
図16では、図15で示した駐車車両に対する点密度の各領域を直線近似したものを示している。
【0057】
図9において、次に、隣り合った二つの領域のRGB平均輝度値を比較し、S206で近似した直線の傾きとRGB平均輝度値とに基づいて同一の物体を構成する領域であるか判定する(S207)。
具体的には、四角形で近似した隣り合う領域の内側の間隔または外側の間隔が一定の閾値より大きい、つまり、隣り合う領域が一つの物体を構成するには離れすぎているか、隣り合う領域が一つの物体を構成すると物体が大きすぎると判断できる場合に、隣り合う領域は一つの物体を構成しないと判定する。駐車車両を対象とする場合、一般的な車両の大きさを考慮して閾値を設定すればよい。
また、直線で近似した隣り合う領域が形成する物体の形状の特徴に基づく判定を行う。
例えば、駐車車両を対象とする場合、中央部の窪んだ車両は無いと判断できることから、隣り合う領域の直線が逆八の字を形成する場合、隣り合う領域は一つの物体を構成しないと判定する。
また、色の連続性を考慮して、隣り合う領域のRGB平均輝度値が一定の閾値以上に異なる場合、隣り合う領域は一つの物体を構成しないと判定する。
上記判定の組合せにより判定を行い、隣り合う領域が一つの物体を構成しないと判定しなかった場合に、隣り合う領域が一つの物体を構成すると判定する。
これにより、物体の一部の画像データが取得できず物体の画像データが複数の領域に分割された場合であっても各領域が一つの物体を構成することを検出することができる。
【0058】
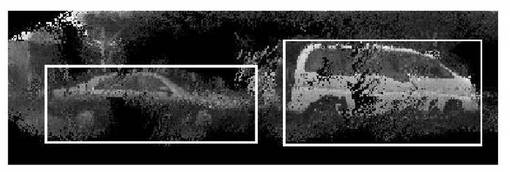
図17は、実施の形態1における変化領域(駐車車両)のY平面投影図(同一物体の判定後)である。
図17では、図16で示したそれぞれ2つの領域に分割された2台の駐車車両を車両単位で認識したものを示している。
【0059】
図9において、最後に、変化領域の物体毎に任意のラベルを付加する(S208)。このラベルは物体に関するデータの指定などに使用する。例えば、ラベルと対応付けて物体のGISデータを教師データ記憶部320に記憶したり、ラベルを指定して物体のGISデータを教師データ記憶部320から削除したりする。
【0060】
次に、二次元平面でクラスタリング及びラベリングの施されたデータについて、物体の輪郭を直方体近似して抽出する場合を説明する。
まず、Y平面やX平面において変化領域の各物体を四角形近似して物体側面の長さと物体の高さを計測する。前出の図17は、Y平面において変化領域の各物体を四角形に近似した場合を示している。
【0061】
次に、Z平面やX平面において変化領域の各物体を四角形近似して物体の幅を計測する。
図18、図19は、実施の形態1における変化領域(駐車車両)のZ平面投影図である。
図18は、図17の2台の駐車車両の三次元モデルデータをZ平面に投影してそれぞれを四角形近似した図である。
また、前出の図5で説明したように、駐車車両に対して前方、後方、側面の画像を取得する場合、画像を取得した反対側の側面を撮像できない為、Z平面投影図は、通常、図19に示すように3辺のみ点密度が存在することになる。しかし、既知の3辺から四角形近似ができるため、駐車車両の幅を計測することができる。
【0062】
次に、S109の処理について説明する。
物体認識部130は、S108で変化領域抽出部120が抽出した輪郭について形状データ記憶部140を検索して抽出した輪郭に対応する物体を判定する。そして、形状データ記憶部140に記憶された対応する物体の情報(例えば、物体の名称)を取得し、変化領域の物体を認識する。
例えば、上記のように直方体近似で輪郭を抽出した場合、直方体の高さ、長さ、幅が一致する物体を形状データ記憶部140で検索する。
【0063】
次に、S110の処理について説明する。
物体認識部130は、S106で変化領域抽出部120が分割した変化領域の各物体に対する画像データ(テクスチャ)をGISモデル記憶部150から取得し、取得したテクスチャとS109で認識した物体の情報とをGISデータ更新部310に出力する。GISデータ更新部310はテクスチャと物体の情報とを教師データ記憶部320に追加する。
【0064】
例えば、教師データ記憶部320に記憶された各物体のデータが直方体近似されたものであり4つの頂点の位置データ(ENU(East North Up)座標系)と高さデータとテクスチャで表される場合、以下のようにして三次元モデルデータから教師(三次元GIS)データ化して教師データ記憶部320を更新する。
まず、物体認識部130は、変化領域の物体を示す点データを最小二乗法により直線近似して、直線の傾きから物体の前後を判定する(図16)。
次に、物体認識部130は、判定した物体の前後に対応させて、直方体近似した物体の各面のテクスチャをGISモデル記憶部150から取得する。
図20は、実施の形態1における直方体近似した物体(駐車車両)からテクスチャを取得する図を示す。
次に、物体認識部130は、変化領域の物体を示す点集合から4つの頂点の点データを取得し、取得した点データ(位置データ)の座標系をENU座標系に変換する。但し、GISモデル記憶部150に記憶された点データの座標系がENU座標系である場合は変換処理は不要である。
そして、物体認識部130は、S109で認識した物体の情報と、判定した物体の前後の情報に対応させて取得したテクスチャと、ENU座標系の4つの頂点の位置データと、S108で計測した高さとをGISデータ更新部310に出力する。GISデータ更新部310は入力したデータを入力した時刻と関連付けて教師データ記憶部320に追加する。
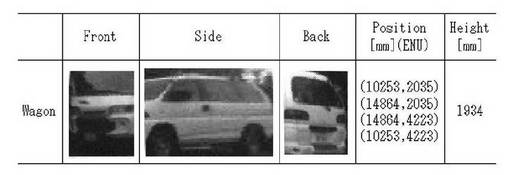
図21は、実施の形態1における教師データ記憶部320に追加するワゴンのデータを示す図である。
図において、Positionは、ワゴンの三次元モデルデータを構成するENU座標系の4つの頂点の位置データ(ENU座標系でのXY方向の座標)を示し、Heightはワゴンの三次元モデルデータの高さ(ENU座標系でのZ方向を高さ方向とする)を示す。また、Front,Side,Backはそれぞれ、ワゴンの三次元モデルデータをX方向、Y方向、−X方向から見た場合の、ワゴンの画像を示す。この画像はテクスチャとしてGISモデル記憶部150に記憶されている。
これによって、変化領域内で新たに出現した三次元モデルデータについて、単なる大きさや形状の情報を取得するだけではなく、テクスチャの画像情報を用いて物体の特徴点を識別することが可能となる。
【0065】
実施の形態1では、センサ200により取得した距離画像データとあらかじめ記憶されていたGISデータベース300のデータとを比較することで変化領域をベクトルデータとして抽出し、追加もしくは撤去された物体を認識する機能と、その認識した物体の変化をGISデータベース300に追加登録することで実世界の変化をデータベースに反映する機能とを示した。
【0066】
これにより、GISデータベース300の更新作業を自動化することができる。
また、短時間でのデータベース更新が可能であり、駐車車両など一定時間のみ存在する物体をデータベースに登録することが可能となり、固定物だけではなく移動体についてもデータベース化とその変化の抽出を行うことができる。
【図面の簡単な説明】
【0067】
【図1】実施の形態1における環境変化認識システム10の構成図。
【図2】実施の形態1における認識装置100の外観を示す図。
【図3】実施の形態1における認識装置100のハードウェア構成図。
【図4】実施の形態1における環境変化認識システム10の処理の流れを示すフローチャート。
【図5】実施の形態1における距離画像取得(S101)の方法を示す図。
【図6】実施の形態1における変化領域の抽出(S105)時の投票処理方法を示す図。
【図7】実施の形態1における変化領域の抽出(S105)時の投票処理方法を示す図。
【図8】実施の形態1における変化領域の分割を示す図。
【図9】実施の形態1における変化領域の分割処理(S106)のフローチャート。
【図10】実施の形態1における変化領域(駐車車両)のY平面投影図(VRML)。
【図11】実施の形態1における変化領域(駐車車両)のY平面投影図(点密度)。
【図12】実施の形態1における変化領域(駐車車両)のY平面投影図(低密度部分削除後)。
【図13】実施の形態1における変化領域(駐車車両)のY平面投影図(領域化後)。
【図14】実施の形態1における変化領域(駐車車両)のY平面投影図(ノイズ削除後)。
【図15】実施の形態1における変化領域(駐車車両)のY平面投影図(分割後)。
【図16】実施の形態1における変化領域(駐車車両)のY平面投影図(直線近似後)。
【図17】実施の形態1における変化領域(駐車車両)のY平面投影図(同一物体の判定後)。
【図18】実施の形態1における変化領域(駐車車両)のZ平面投影図。
【図19】実施の形態1における変化領域(駐車車両)のZ平面投影図。
【図20】実施の形態1における直方体近似した物体(駐車車両)からテクスチャを取得する図。
【図21】実施の形態1における教師データ記憶部320に追加するワゴンのデータを示す図。
【符号の説明】
【0068】
10 環境変化認識システム、100 認識装置、110 GISモデル作成部、120 変化領域抽出部、130 物体認識部、140 形状データ記憶部、150 GISモデル記憶部、200 センサ、210 距離画像測定装置、300 GISデータベース、310 GISデータ更新部、320 教師データ記憶部、330 GISデータ参照部、901 CRT表示装置、902 K/B、903 マウス、904 FDD、905 CDD、906 プリンタ装置、907 スキャナ装置、910 システムユニット、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、931 電話器、932 FAX機、940 インターネット、941 ウェブサーバ、942 LAN。
【技術分野】
【0001】
本発明は、GISデータを利用して変化領域を認識する変化領域認識装置および変化認識システムに関するものである。
【背景技術】
【0002】
三次元GIS(Geographic Information System)は、従来の2次元地図の拡張として考えられ、主に測量・地図メーカによって発展されてきた。現在そのような分野では、広範囲の地図の作成に、航空機からの写真撮影によって情報を収集する手法が一般的であり、三次元GISの作成に関しても、航空機からの写真撮影やレーザレーダにより、建物の高さの測定が行われてきた(特許文献1,特許文献2)。航空機からの情報収集は一度に広大な範囲を測定することが可能であり、地形の計測や、ビル等の大型建造物の形状データを比較的容易に得ることができる。
【0003】
また、三次元GISは、実世界の空間情報をデータベースとしてモデル化したものである。物体をオブジェクトとして扱い、従来の地図で表される2次元座標に加え、高さ情報や時間変化、所有者など様々な属性情報を付与することが可能であり、地図で一般的に表現される建造物等の固定物だけではなく、固定物の破損や時間変化、人や車といった移動体についても「何が」「いつ」「どこに」存在したかということを表すことができる。また、データベースとなっていることでオブジェクトの条件検索や、要素の演算が可能であり、必要とされるデータを容易に作製することができる。
つまり、空間情報をGISデータベースに統合・管理し、必要な情報をシミュレータによって仮想空間上に再現することで、広大な実世界の状況を容易に、素早く把握することが可能となり、監視や警備の自動化や、災害発生時の初期状況把握に対して有効であると考えられる。
【特許文献1】特開2003−323640号公報
【特許文献2】特開2002−328021号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで現在、三次元GISデータを教師データとして、固定センサまたは移動センサを用いて状況の変化を捉え、監視・警備業務を自動化しようというニーズがある。例えば、駐車場における駐車状況の把握や、工場などの進入規制のある場所に対する人の出入りの監視、山崩れの危険のある場所の監視、都市部における大震災後の震災総合シミュレータへの適応などである。これらの業務は従来、人間の目によって絶え間なく監視することで対応されてきた。しかし、人間は疲れなどで見逃す可能性があり、その精度には限界があった。
【0005】
現在の三次元GISは、従来の2次元地図と同様に、ある時点で作成したモデルは時々刻々と変化する実世界を追従することができない。このため、時間の経過と共にデータベースとしての価値を失ってしまっていた。つまり、更新の頻度がデータベースの価値を決定し、特に監視や警備の用途においてはほぼリアルタイムでのデータベース更新が必要となる。しかし、三次元GISの作成には2次元地図よりもはるかに膨大なデータを取得する必要があり、そのデータ処理にも多大なる作業が発生するため、容易には行えない。そのため、年単位でのデータベース更新が一般的であり、監視・警備用途で必要となるような、リアルタイムでの変化域の抽出とデータベースの更新は行われていない。また、データベース化される対象も固定物に限定されている。
【0006】
本発明は、上記の課題などを解決するためになされたもので、例えば、リアルタイムに変化領域を抽出できるようにすることを目的とする。
また、リアルタイムにGISデータベースを更新できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の変化領域認識装置は、特定領域を示す第1の領域データと任意の時刻における前記特定領域を示す第2の領域データとを入力し、入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを前記特定領域内の変化領域を示す変化領域データとして特定する変化領域特定部と、前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部とを備えたことを特徴とする。
【発明の効果】
【0008】
本発明によれば、第1の領域データと第2の領域データとを誤差領域を用いて比較することで的確に変化領域を抽出することができる。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
三次元GISを監視・警備用途に使用することを考えると、従来のGISデータ更新方法において幾つかの問題が明確になる。まず、測定位置が上空であることである。上空からの測定では、地面や屋根といった水平面の計測がしやすい反面、壁面などの垂直面や屋根の下などの陰になる部分に対してほとんど計測できない。また、人や車両など地形に比べると格段に小さな物体を対象とすることは、今後のセンサの解像度向上や計算機の画像処理能力の向上を考慮しても困難である。また、データ取得から解析処理に時間がかかり、データベースの更新には数ヶ月から数年単位、短くても数日を要していた。このため、人や車両といった移動体をデータベース化したり、変化が起こった時を捉えたりといった用途には使用できなかった。
【0010】
図1は、実施の形態1における環境変化認識システム10の構成図である。
人や車両を含む変化領域の抽出と、抽出した変化領域のGISデータベースへの反映とをリアルタイムに行うための環境変化認識システム10の構成について、図1に基づいて以下に説明する。
【0011】
環境変化認識システム10は、距離画像の計測を行う一つ以上のセンサ200(図1ではセンサ200を一つだけ図示する)と、センサ200の計測結果を解析処理する認識装置100と、GISデータを管理、更新するGISデータベース300とを備える。それぞれの間はデータ通信回線で接続されている。
【0012】
センサ200は、周囲の環境を計測し距離画像の取得を行う距離画像測定装置210を備える。距離画像測定装置210は、例えばレーザレーダやステレオ視カメラ等の画像データ取得部とデータ処理部を備えて構成される。
ここでセンサ200は、測定対象(領域や物体)を計測できるように配置されているものとする。例えば、測定対象の3方(前方、後方、側面)を撮像できるようにして2ヶ所以上に配置してもよいし、自己位置標定装置(例えばRTK−GPS/INS:RealTime Kinematic−Global Positioning System/Inertial Navigation System)(図示しない)を備えて自己位置を取得する1つのセンサ200を配置し、測定対象の周辺を移動してもよい。
【0013】
以下、センサ200が、360度全周囲の撮像が可能なODV(Omni−Directional Vision)により距離画像を取得する距離画像測定装置210と、RTK−GPS/INSにより自己位置を測位する自己位置標定装置(図示しない)とを備える場合について説明する。このとき、自己位置を測位できるセンサ200は測位対象の周辺を移動する。
RTK−GPS/INSによる測位をする場合、センサ200は、数センチの精度でリアルタイムに自己の位置・姿勢の計測が可能になる。また、ODVにより撮像する場合、センサ200は、計測した位置・姿勢のデータと同期のとれた全周画像を取得することが可能になる。そして、RTK−GPS/INSの計測データから求められるODVの位置(ODVの円筒形状を成す仮想撮像面の中心位置)・姿勢(ODVの仮想撮像面の中心を原点とする局所空間座標系の基準座標軸の方向)や移動速度などの運動パラメータと、センサ200の移動に伴ない複数地点でODVにより取得した全周画像とを用いて、距離画像測定装置210のデータ処理部でエピポーラ拘束や視差を求めるモーションステレオ視の方法により距離画像を取得する。
例えば、異なる二地点でRTK−GPS/INSの計測データからODVの位置・姿勢の6自由度を推定し、これを拘束条件としてODVの全周画像の全画素に関するエピポーラ拘束(移動に伴なうODVの各位置とODVの注視点とが存在する平面であるエピポーラ平面、及びエピポーラ平面がODVの仮想撮像面と交差するエピポーラ線等の幾何学的な拘束条件)を求める。このエピポーラ拘束に従い、異なる二地点でそれぞれ得られた全周画像(仮想撮像面)上で、同一対象物(二地点の全周画像上で互いに対応する注視点)の画像を特定する(マッチングを取る)。特定した各画像を用いてモーションステレオ視の原理によって視差によって対象物までの距離と方向を求め、当該距離と方向に存在する画像の画像情報を求めて、距離画像を得る。この距離画像を用いて各画像の三次元モデルを構築することによって、密なテクスチャ付き三次元モデルの作成が可能になる。
さらに、360度全周囲の画像を自己位置/姿勢と同期して取得できるため、走行中のデータ取得が可能である他、車体動揺による姿勢角の補正も可能になる。また、ステレオ視演算の相関を取る画像を変え、ベースラインを自由に変えることで、距離画像精度を上げることが可能になる。
【0014】
ここで、距離画像とは、センサ200からセンサ200のセンシング範囲にある測定対象までのベクトルデータと画像データから構成されるデータのことである。このベクトルデータは、センサ200から測定対象を構成する各点までのベクトルを示し、センサ座標系で表現される。また、この画像データはセンサ200が取得した測定対象の画像における1画素もしくは数画素分の色情報や階調情報等で構成される。距離画像は測定対象を構成する各点毎のデータを集合させた点列データとして得られる。
なお、レーザレーダで距離画像を取得する場合は、レーザの出力光が物体で反射して戻ってくるまでの時間を計測して距離を算出した後、レーザの出力方向を変動させる。レーザの出力方向と上記算出された距離とを逐次計測し、この計測値を集積することによって物体の三次元形状を測定する。
【0015】
認識装置100はGISモデル作成部110と変化領域抽出部120と物体認識部130と形状データ記憶部140とGISモデル記憶部150とを備える。
GISモデル作成部110では、センサ200が取得した測定対象の距離画像と位置情報とを入力して三次元GISモデルデータを作成する。センサ200が複数存在する場合は、測定対象を測定した複数のセンサ200のデータを入力して一つの三次元GISモデルデータを作成する。そして、作成した三次元GISモデルをGISモデル記憶部150に記憶する。三次元GISモデル(以下、三次元モデルデータとする)とは、センサ200の取得した点列データをセンサ座標系から任意の座標系に変換したデータであり、三次元の領域を示すデータである。
なお、任意の座標系としては、各地域毎に設定された基準座標系を用いても良いし、特定の施設や領域内で固定された局所的な基準座標系を用いても良い。
変化領域抽出部120では、GISモデル作成部110が作成した三次元モデルデータとGISデータベース300であらかじめ管理されている三次元GISデータとを比較する。そして、GISデータベース300の三次元GISデータを教師データとしてGISモデル作成部110が作成した三次元モデルデータの差異を抽出し、抽出した差異部分を変化領域とする。そして、変化領域内に存在する新たな物体を抽出する。つまり、変化要因である物体(変化領域)を特定する。GISモデル作成部110とGISデータベース300は共通の座標系を参照する。
形状データ記憶部140には、各種物体の「形状」、「大きさ」の情報(形状データ)を記憶しておく。
物体認識部130では、変化領域抽出部120が抽出した変化領域内の新たな物体の「形状」、「大きさ」をキーとして形状データ記憶部140を検索し、対応する物体を判定する。つまり、変化を引き起こしたのがどのような状況によるものかの認識を行う。
【0016】
GISデータベース300は教師データ記憶部320とGISデータ更新部310とGISデータ参照部330とを備える。
教師データ記憶部320は三次元GISデータ(教師データ)を時刻と共に記憶する。三次元GISデータとは、三次元の領域を示すデータである。
GISデータ更新部310は、認識装置100で認識した物体の発失を教師データ記憶部320に登録する。つまり、GISデータ更新部310がセンサ200の計測の状況をデータベースに反映することで、現在の状況へと更新する。
GISデータ参照部330は、測位対象に関する情報(位置情報や名称)を入力し、対応する教師データを教師データ記憶部320から取得して出力する。つまり、センサ200の前回の測定時の教師データを認識装置100に出力する。
三次元GISデータ(教師データ)では、測定対象となった建物や構造物等の立体形状を有する物体毎に、各物体を互いに識別するための識別番号が割当てられている。三次元GISデータは、例えば複数の点(ノード)と各ノードを接続する接続ラインから構成されて、接続ラインが立体的な形状を成す。
【0017】
以下、時空間GISとして知られるKIWI+を使用する場合について説明する。
KIWI+のデータフォーマットは、建物等の物体をベクトルと画像テクスチャ等の属性で表現している。そこで認識装置100は、センサ200がステレオ視で得た三次元の点列データから面抽出を行い、面の各頂点を求めベクトル化し、得られた面にODV画像の対応テクスチャを貼付け、専用API(Application Program Interface)(GISデータ更新部310のインタフェース)を介してKIWI+データベース(GISデータベース300)の更新を行う。
【0018】
図2は、実施の形態1における認識装置100の外観を示す図である。
図2において、認識装置100は、システムユニット910、CRT(Cathode Ray Tube)表示装置901、キーボード(K/B)902、マウス903、コンパクトディスク装置(CDD)905、プリンタ装置906、スキャナ装置907を備え、これらはケーブルで接続されている。
さらに、認識装置100は、FAX機932、電話器931とケーブルで接続され、また、ローカルエリアネットワーク(LAN)942、ウェブサーバ941を介してインターネット940に接続されている。
【0019】
図3は、実施の形態1における認識装置100のハードウェア構成図である。
図3において、認識装置100は、プログラムを実行するCPU(Central Processing Unit)911を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915、CRT表示装置901、K/B902、マウス903、FDD(Flexible Disk Drive)904、磁気ディスク装置920、CDD905、プリンタ装置906、スキャナ装置907と接続されている。
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、磁気ディスク装置920、光ディスク装置は、不揮発性メモリの一例である。これらは、記憶装置あるいは記憶部の一例である。
通信ボード915は、FAX機932、電話器931、LAN942等に接続されている。
例えば、通信ボード915、K/B902、スキャナ装置907、FDD904などは、情報入力部の一例である。
また、例えば、通信ボード915、CRT表示装置901などは、出力部の一例である。
【0020】
ここで、通信ボード915は、LAN942に限らず、直接、インターネット940、或いはISDN等のWAN(ワイドエリアネットワーク)に接続されていても構わない。直接、インターネット940、或いはISDN等のWANに接続されている場合、認識装置100は、インターネット940、或いはISDN等のWANに接続され、ウェブサーバ941は不用となる。
磁気ディスク装置920には、オペレーティングシステム(OS)921、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923は、CPU911、OS921、ウィンドウシステム922により実行される。
【0021】
上記プログラム群923には、実施の形態の説明において「〜部」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、実施の形態の説明において、「〜判定し」、「〜を判定した結果」、「〜を計算し」、「〜を計算した結果」、「〜を処理し」、「〜を処理した結果」のような表現で説明する結果情報が、「〜ファイル」として記憶されている。
また、実施の形態の説明において説明するフローチャートの矢印の部分は主としてデータの入出力を示し、そのデータの入出力のためにデータは、磁気ディスク装置920、FD(Flexible Disk cartridge)、光ディスク、CD(コンパクトディスク)、MD(ミニディスク)、DVD(Digital Versatile Disk)、その他の記録媒体に記録される。あるいは、信号線やその他の伝送媒体により伝送される。
【0022】
また、実施の形態の説明において「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、ハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。
【0023】
また、実施の形態を実施するプログラムは、磁気ディスク装置920、FD、光ディスク、CD、MD、DVD、その他の記録媒体による記録装置を用いて記憶されても構わない。
【0024】
図4は、実施の形態1における環境変化認識システム10の処理の流れを示すフローチャートである。
環境変化認識システム10において、まず、センサ200は距離画像測定装置210(全周撮像装置:ODV)から距離画像を取得すると共に撮像した位置の情報を取得する(S101〜S102)。次に、GISモデル作成部110は取得した距離画像と位置情報とに基づいて距離画像の三次元モデルデータを生成する(S103〜S104)。生成された三次元モデルデータは一旦メモリに格納される。
次に、変化領域抽出部120は三次元モデルデータと教師データを、三次元空間上で投票処理して変化領域を抽出する。抽出した変化領域において物体が消失している場合、GISデータ更新部310は、消失した物体(の存在位置・存在領域)に対応する教師データを更新する。GISモデルデータには、その識別番号に対応付けられて消失した物体の消失時間を示す消失時間フラグ、新たに生成した物体の生成時間を示す生成時間フラグ等の、属性データの記憶領域が設定されている。
例えば、教師データ記憶部320から、三次元モデルデータ中で消失した物体に対応するGISモデルデータを参照し、参照されたGISモデルデータに対して消失した物体の消失時間を示す消失時間フラグを設定する。(S105)。
次に、変化領域抽出部120は抽出した変化領域において新たな物体が発生している場合、クラスタリング処理をして変化領域の分割を行い、発生した新たな物体(以下、変化領域の物体とする)を抽出する(S106)。
次に、変化領域の物体の三次元モデルをXYZ各面に投影し(S107)、変化領域の物体の輪郭を抽出する(S108)。
次に、物体認識部130は抽出した物体の輪郭と形状データ記憶部140に記憶された物体の形状データとを比較し、変化領域の物体の認識を行う(S109)。そして、GISデータ更新部310は認識した物体を教師データ記憶部320に反映させる(S110)。
【0025】
環境変化認識システム10は、このようなフローにより、作成した三次元モデルから、環境の変化の認識とGISデータベース300の更新作業を自動的に行うことで、教師(GIS)データの更新範囲を小さくし、環境の変化をリアルタイムに捉えることができる。
【0026】
次に、図4に示すフローチャートの各処理の詳細について以下に説明する。
ここでは、教師(GIS)データに存在しない駐車車両を変化領域の物体として抽出する例で説明を行う。
【0027】
まず、S101〜S104の処理について説明する。
図5は、実施の形態1における距離画像取得(S101)の方法を示す図である。
センサ200は、図5に示すように、車両脇を画像取得位置1から画像取得位置3に移動して車両の前後、道路側の側面からの距離画像を取得する(S101)。また、距離画像を取得時に距離画像を取得した位置をGPS/INSにより測位する(S102)。
GISモデル作成部110は、センサ200から距離画像(点列データ)と位置情報とを取得する。そして、位置情報に対してセンサ200のセンサ座標系から教師データ記憶部320に記憶されるGISデータの座標系に座標変換を行う(S103)。
GISモデル作成部110は、距離画像を座標変換した位置情報に対応させて、X座標値、Y座標値、Z座標値と色情報(RGB:Red−Green−Blue)とを持つ点列データ(三次元モデルデータ)をGISモデル記憶部150に記憶する(S104)。
【0028】
次に、S105の処理について説明する。
三次元モデルデータを生成する際に行ったODVの測定と、教師データ記憶部320の教師(三次元GIS)データを生成する際に行った測定では測定環境が異なる。つまり、三次元モデルデータと教師データとでは誤差が生じるため、重複するデータを消去することで差分をとることができない。そこで、変化領域抽出部120は、まず、GISモデル記憶部150から、新たに生成された三次元モデルデータを取得する。次に、取得した三次元モデルの位置情報をGISデータ参照部330に出力する。GISデータ参照部330は、教師データ記憶部320から位置情報の示す位置に対応する教師データを取得して変化領域抽出部120に出力する。そして変化領域抽出部120は、生成された三次元モデルデータと、教師データを用いて投票処理を行い、変化領域を抽出する(S105)。
【0029】
図6、図7は、実施の形態1における変化領域の抽出(S105)時の投票処理方法を示す図である。
投票処理について、図6、図7に基づいて以下に説明する。
まず、三次元GISデータの座標系(Σ)に沿って、空間を特定の間隔dで区切ることで、空間を複数の小空間(ボクセル空間。以下、単にボックスと呼ぶ)に区分けする。各ボックスを、例えば三次元の配列データ(i,j,k)で番号付けする。
次に、センサ200の取得画像から三次元モデルデータを生成する。三次元モデルデータの各データ点(ノード)について、どのボックス内にそのデータ点の座標が存在するのかを識別する。例えば図6の例に示すように、上記ボックスのうち、そのデータ点の座標Q(2.3、1.5、0.3)が内部に含まれるボックスBを、データ点を有した(2、1、0)番の配列のボックスとしてカウントする(投票処理する)。このボックスの投票処理により、三次元モデルデータの各データ点の集合を、ボックスの集合(ボックスが繋がって形成される集合体)に捉え直して表現する。なお、データ点の座標からボックスの配列を求める際は、図の例のように単に座標値を四捨五入するなど、簡便な方法を用いて求めると、演算量を軽減することができる。
また、データ点が含まれるボックスの座標として、そのボックスの代表点P(中心点など)を採用し、その代表点を用いて以下のように誤差判定を行う。
投票処理の結果得られるボックスの代表点を、各代表点に一定の誤差σを持たせた球状の領域の集合として、この代表点と教師(三次元GIS)データと比較する。
図7左図のように、三次元GISデータを構成する各点(黒丸)の誤差領域内にボックスモデルデータを構成する代表点(白丸)が存在する場合は、この代表点を有するボックスモデルデータが三次元GISデータと同一と判定し、このボックスモデルデータを切り捨てる。
図7右図のように、三次元GISデータの誤差領域内にボックスモデルデータを構成する代表点が存在しない場合は、このボックスモデルデータが変化領域の一部を示すデータであると判断して、この代表点に連結したボックスモデルデータを整理する。
【0030】
ここで、ボックスモデルデータの各代表点に持たせる誤差は以下のように求める。
代表点の測定値が複数ある場合、加重平均をして測定値の最良推定値を求める。以下、ある量XについてN個の測定値があるものとする(式1)。
【0031】
【数1】
【0032】
式1において、σ1,σ2,・・・σNはそれぞれの誤差、つまり標準偏差である。以下に標準偏差の算出方法を示す。
【0033】
最良推定値は加重平均Xwavの計算式を式2に示す。
【0034】
【数2】
【0035】
ここで、和はN個すべての測定値にまたがり、i=1,2,・・・Nである。
また、Wiは式3のように定義される重みであり、それぞれの誤差の逆数の二乗である。
【0036】
【数3】
【0037】
以上より、求める誤差σiは式4で示すことができる。
【0038】
【数4】
【0039】
次に、S106(図4)の処理について説明する。
S105で抽出した変化領域はそれぞれ特定の体積を持つボックスであるが、変化をもたらしたものは何らかの形状を持つ物体である。
よって、この変化の生じた変化ボックスを、変化領域として認識する必要がある。
そこで、変化領域の分割(S106)の処理では、互いの間隔が一定範囲内にある隣接したボックスをまとめて、ひとつの変化領域として認識する。
これをクラスタリングと呼ぶ。
その手順は以下のとおりである。
(1)低密度部分の消去
ボックスのカウント数がしきい値以下となるボックスの、カウント値を0とする。
(2)領域化
所定のボックスに囲まれたカウント値0のボックスに対し、高いカウント値を設定することで領域化する。
(3)ノイズの削除
まとまったボックス集合体の、領域体積の小さい領域(ノイズ領域)を削除する。
S105で抽出した変化領域内には、複数の物体を含んでいる場合が考えられ、それらを個別に認識する必要がある。そこで変化領域の分割(S106)では、クラスタリング処理で変化領域を物体毎に分割している。クラスタリング処理とは、変化領域をボックスが連結する各部分に分割し、分割した各部分が別の物体を構成するものか同一の物体を構成するものかを判定して同一の物体を構成する部分をグループ化する処理のことである。
【0040】
次に、S107(図4)の処理について説明する。
変化領域抽出部120は、S106で分割した各変化領域の三次元モデルデータをX、Y、Zの各平面に投影する。例えば、VRMLや点密度で三次元モデルデータを各平面に投影する。
【0041】
次に、S108の処理について説明する。
変化領域抽出部120は、S107で各変化領域の三次元モデルデータを投影した各平面のデータに基づいて物体の輪郭を抽出する。例えば、曲線、曲面を抽出してもよいし、前出の直線近似により輪郭を抽出してもよい。
【0042】
ここで、輪郭抽出のための前処理として、以下に変化領域の分割の詳細について説明する。
図8は、実施の形態1におけるS108で実施される変化領域の分割を示す図である。
図8において、左図が分割前の変化領域であり、右図が分割後の変化領域である。右図は、左図の変化領域をラベル1で示す領域、ラベル2で示す領域、ラベル3で示す領域に分割した場合を示している。
【0043】
図9は、この変化領域の分割処理のフローチャートである。
図8に示す変化領域の分割を行うために変化領域抽出部120は図9に示す処理を行う。
図9において、S201〜S207の処理がクラスタリング処理であり、S208の処理がラベリング処理である。
【0044】
まず、S107で処理された、変化領域の三次元モデルデータ(距離画像から作成された点データの集合)のY平面への投影データについて、Y平面における変化領域を区分し、各区分の点密度を算出する(S201)。
【0045】
図10は、実施の形態1における変化領域(駐車車両)のY平面投影図(VRML)である。
図10では、抽出された変化領域の駐車車両(2台)の三次元モデルデータをVRML(Virtual Reality Modeling Language)フォーマットでY平面(ここでは、車両の側面)に投影したものを示している。
【0046】
図11は、実施の形態1における変化領域(駐車車両)のY平面投影図(点密度)である。
図11では、図10で示した駐車車両を、1cm2あたりの三次元モデルの点密度で示している。つまり、1cm2内に点データが有る場合、その1cm2を1つの点で示す。また、その1cm2内に存在する点の数(点密度)が多い場合と少ない場合とで色を変える。
図11は、横視差ステレオで距離画像を取得し三次元モデルを作成した場合のY平面投影図であるが、横視差ステレオは、ベースラインと平行する横エッジの感度が低いため、横エッジが少ない車両の側面には測定できなかった部分(点データが無い部分または点密度が低い部分)が生じている。
【0047】
図9において、次に、点密度の低い部分のデータを削除する(S202)。
【0048】
図12は、実施の形態1における変化領域(駐車車両)のY平面投影図(低密度部分削除後)である。
図12では、図11で示した駐車車両に対する点密度のうち、点密度が10未満の部分を削除したものを示している。
【0049】
図9において、次に、高い点密度部分に囲まれた点密度が0の部分(S202で削除された点密度の低い部分を含む)のデータに高い点密度を設定して、一つの高い点密度の領域にする(S203)。
【0050】
図13は、実施の形態1における変化領域(駐車車両)のY平面投影図(領域化後)である。
図13では、図12で示した駐車車両に対する点密度のうち、高い点密度部分に囲まれた隙間を埋めて領域化したものを示している。
【0051】
図9において、次に、面積が小さい点密度の領域(ノイズ)のデータを削除する(S204)。
【0052】
図14は、実施の形態1における変化領域(駐車車両)のY平面投影図(ノイズ削除後)である。
図14では、図13で示した駐車車両に対する点密度の領域のうち、領域面積が10(cm2)以下の領域を削除したものを示している。
【0053】
図9において、次に、変化領域のデータをS204までで処理した点密度の各領域のデータに対応させて分割する(S205)。
【0054】
図15は、実施の形態1における変化領域(駐車車両)のY平面投影図(分割後)である。
図15では、図14で示した駐車車両に対する四角形で近似した各領域で変化領域を分割したものを示している。図15において、変化領域の2台の駐車車両はそれぞれ車体の前部と後部とに分割されている。
【0055】
図9において、次に、点密度の各領域のデータを最小二乗法により直線近似する(S206)。
【0056】
図16は、実施の形態1における変化領域(駐車車両)のY平面投影図(直線近似後)である。
図16では、図15で示した駐車車両に対する点密度の各領域を直線近似したものを示している。
【0057】
図9において、次に、隣り合った二つの領域のRGB平均輝度値を比較し、S206で近似した直線の傾きとRGB平均輝度値とに基づいて同一の物体を構成する領域であるか判定する(S207)。
具体的には、四角形で近似した隣り合う領域の内側の間隔または外側の間隔が一定の閾値より大きい、つまり、隣り合う領域が一つの物体を構成するには離れすぎているか、隣り合う領域が一つの物体を構成すると物体が大きすぎると判断できる場合に、隣り合う領域は一つの物体を構成しないと判定する。駐車車両を対象とする場合、一般的な車両の大きさを考慮して閾値を設定すればよい。
また、直線で近似した隣り合う領域が形成する物体の形状の特徴に基づく判定を行う。
例えば、駐車車両を対象とする場合、中央部の窪んだ車両は無いと判断できることから、隣り合う領域の直線が逆八の字を形成する場合、隣り合う領域は一つの物体を構成しないと判定する。
また、色の連続性を考慮して、隣り合う領域のRGB平均輝度値が一定の閾値以上に異なる場合、隣り合う領域は一つの物体を構成しないと判定する。
上記判定の組合せにより判定を行い、隣り合う領域が一つの物体を構成しないと判定しなかった場合に、隣り合う領域が一つの物体を構成すると判定する。
これにより、物体の一部の画像データが取得できず物体の画像データが複数の領域に分割された場合であっても各領域が一つの物体を構成することを検出することができる。
【0058】
図17は、実施の形態1における変化領域(駐車車両)のY平面投影図(同一物体の判定後)である。
図17では、図16で示したそれぞれ2つの領域に分割された2台の駐車車両を車両単位で認識したものを示している。
【0059】
図9において、最後に、変化領域の物体毎に任意のラベルを付加する(S208)。このラベルは物体に関するデータの指定などに使用する。例えば、ラベルと対応付けて物体のGISデータを教師データ記憶部320に記憶したり、ラベルを指定して物体のGISデータを教師データ記憶部320から削除したりする。
【0060】
次に、二次元平面でクラスタリング及びラベリングの施されたデータについて、物体の輪郭を直方体近似して抽出する場合を説明する。
まず、Y平面やX平面において変化領域の各物体を四角形近似して物体側面の長さと物体の高さを計測する。前出の図17は、Y平面において変化領域の各物体を四角形に近似した場合を示している。
【0061】
次に、Z平面やX平面において変化領域の各物体を四角形近似して物体の幅を計測する。
図18、図19は、実施の形態1における変化領域(駐車車両)のZ平面投影図である。
図18は、図17の2台の駐車車両の三次元モデルデータをZ平面に投影してそれぞれを四角形近似した図である。
また、前出の図5で説明したように、駐車車両に対して前方、後方、側面の画像を取得する場合、画像を取得した反対側の側面を撮像できない為、Z平面投影図は、通常、図19に示すように3辺のみ点密度が存在することになる。しかし、既知の3辺から四角形近似ができるため、駐車車両の幅を計測することができる。
【0062】
次に、S109の処理について説明する。
物体認識部130は、S108で変化領域抽出部120が抽出した輪郭について形状データ記憶部140を検索して抽出した輪郭に対応する物体を判定する。そして、形状データ記憶部140に記憶された対応する物体の情報(例えば、物体の名称)を取得し、変化領域の物体を認識する。
例えば、上記のように直方体近似で輪郭を抽出した場合、直方体の高さ、長さ、幅が一致する物体を形状データ記憶部140で検索する。
【0063】
次に、S110の処理について説明する。
物体認識部130は、S106で変化領域抽出部120が分割した変化領域の各物体に対する画像データ(テクスチャ)をGISモデル記憶部150から取得し、取得したテクスチャとS109で認識した物体の情報とをGISデータ更新部310に出力する。GISデータ更新部310はテクスチャと物体の情報とを教師データ記憶部320に追加する。
【0064】
例えば、教師データ記憶部320に記憶された各物体のデータが直方体近似されたものであり4つの頂点の位置データ(ENU(East North Up)座標系)と高さデータとテクスチャで表される場合、以下のようにして三次元モデルデータから教師(三次元GIS)データ化して教師データ記憶部320を更新する。
まず、物体認識部130は、変化領域の物体を示す点データを最小二乗法により直線近似して、直線の傾きから物体の前後を判定する(図16)。
次に、物体認識部130は、判定した物体の前後に対応させて、直方体近似した物体の各面のテクスチャをGISモデル記憶部150から取得する。
図20は、実施の形態1における直方体近似した物体(駐車車両)からテクスチャを取得する図を示す。
次に、物体認識部130は、変化領域の物体を示す点集合から4つの頂点の点データを取得し、取得した点データ(位置データ)の座標系をENU座標系に変換する。但し、GISモデル記憶部150に記憶された点データの座標系がENU座標系である場合は変換処理は不要である。
そして、物体認識部130は、S109で認識した物体の情報と、判定した物体の前後の情報に対応させて取得したテクスチャと、ENU座標系の4つの頂点の位置データと、S108で計測した高さとをGISデータ更新部310に出力する。GISデータ更新部310は入力したデータを入力した時刻と関連付けて教師データ記憶部320に追加する。
図21は、実施の形態1における教師データ記憶部320に追加するワゴンのデータを示す図である。
図において、Positionは、ワゴンの三次元モデルデータを構成するENU座標系の4つの頂点の位置データ(ENU座標系でのXY方向の座標)を示し、Heightはワゴンの三次元モデルデータの高さ(ENU座標系でのZ方向を高さ方向とする)を示す。また、Front,Side,Backはそれぞれ、ワゴンの三次元モデルデータをX方向、Y方向、−X方向から見た場合の、ワゴンの画像を示す。この画像はテクスチャとしてGISモデル記憶部150に記憶されている。
これによって、変化領域内で新たに出現した三次元モデルデータについて、単なる大きさや形状の情報を取得するだけではなく、テクスチャの画像情報を用いて物体の特徴点を識別することが可能となる。
【0065】
実施の形態1では、センサ200により取得した距離画像データとあらかじめ記憶されていたGISデータベース300のデータとを比較することで変化領域をベクトルデータとして抽出し、追加もしくは撤去された物体を認識する機能と、その認識した物体の変化をGISデータベース300に追加登録することで実世界の変化をデータベースに反映する機能とを示した。
【0066】
これにより、GISデータベース300の更新作業を自動化することができる。
また、短時間でのデータベース更新が可能であり、駐車車両など一定時間のみ存在する物体をデータベースに登録することが可能となり、固定物だけではなく移動体についてもデータベース化とその変化の抽出を行うことができる。
【図面の簡単な説明】
【0067】
【図1】実施の形態1における環境変化認識システム10の構成図。
【図2】実施の形態1における認識装置100の外観を示す図。
【図3】実施の形態1における認識装置100のハードウェア構成図。
【図4】実施の形態1における環境変化認識システム10の処理の流れを示すフローチャート。
【図5】実施の形態1における距離画像取得(S101)の方法を示す図。
【図6】実施の形態1における変化領域の抽出(S105)時の投票処理方法を示す図。
【図7】実施の形態1における変化領域の抽出(S105)時の投票処理方法を示す図。
【図8】実施の形態1における変化領域の分割を示す図。
【図9】実施の形態1における変化領域の分割処理(S106)のフローチャート。
【図10】実施の形態1における変化領域(駐車車両)のY平面投影図(VRML)。
【図11】実施の形態1における変化領域(駐車車両)のY平面投影図(点密度)。
【図12】実施の形態1における変化領域(駐車車両)のY平面投影図(低密度部分削除後)。
【図13】実施の形態1における変化領域(駐車車両)のY平面投影図(領域化後)。
【図14】実施の形態1における変化領域(駐車車両)のY平面投影図(ノイズ削除後)。
【図15】実施の形態1における変化領域(駐車車両)のY平面投影図(分割後)。
【図16】実施の形態1における変化領域(駐車車両)のY平面投影図(直線近似後)。
【図17】実施の形態1における変化領域(駐車車両)のY平面投影図(同一物体の判定後)。
【図18】実施の形態1における変化領域(駐車車両)のZ平面投影図。
【図19】実施の形態1における変化領域(駐車車両)のZ平面投影図。
【図20】実施の形態1における直方体近似した物体(駐車車両)からテクスチャを取得する図。
【図21】実施の形態1における教師データ記憶部320に追加するワゴンのデータを示す図。
【符号の説明】
【0068】
10 環境変化認識システム、100 認識装置、110 GISモデル作成部、120 変化領域抽出部、130 物体認識部、140 形状データ記憶部、150 GISモデル記憶部、200 センサ、210 距離画像測定装置、300 GISデータベース、310 GISデータ更新部、320 教師データ記憶部、330 GISデータ参照部、901 CRT表示装置、902 K/B、903 マウス、904 FDD、905 CDD、906 プリンタ装置、907 スキャナ装置、910 システムユニット、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、931 電話器、932 FAX機、940 インターネット、941 ウェブサーバ、942 LAN。
【特許請求の範囲】
【請求項1】
特定領域を示す第1の領域データと任意の時刻における前記特定領域を示す第2の領域データとを入力し、
入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、
第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、
抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを前記特定領域内の変化領域を示す変化領域データとして特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項2】
変化の起きた特定領域内の変化領域を点データの集合で表す変化領域データを入力し、
入力した変化領域データを表す各点データに基づいて立体的形状を成す変化領域の輪郭を算出し、算出した輪郭を持つ変化領域を表す変化領域データを特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域をベクトルデータとして認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項3】
変化の起きた特定領域内の変化領域を点データの集合で表す変化領域データを入力し、
入力した変化領域データを特定の第1の面積で区分し、
変化領域データを特定の第1の面積で区分した各区分データに該区分データ内の点データの個数を設定し、
点データの個数が特定の閾値未満である区分データの点データの個数に0を設定し、
0以外が設定された各区分データの示す各区分に囲まれた区分の区分データに0以外を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分の面積を算出し、算出した面積が特定の第2の面積未満である連結する区分の各区分データに0を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分を各区分データに基づいて直線で近似し、
各区分データに基づいて近似した直線の傾きに基づいて隣り合う各連結する区分の関連を判定し、
関連すると判定した各連結する区分の各区分データを特定領域内の一つの変化領域データと特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項4】
特定領域を点データの集合で表す第1の領域データと任意の時刻における前記特定領域を点データの集合で表す第2の領域データとを入力し、
入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、
第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、
抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを前記特定領域内の変化領域を示す変化領域データとし、
変化領域データを表す各点データに基づいて変化領域の輪郭を算出し、算出した輪郭を持つ変化領域を表す変化領域データを特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項5】
特定領域を点データの集合で表す第1の領域データと任意の時刻における前記特定領域を点データの集合で表す第2の領域データとを入力し、
入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、
第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、
抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを第1の時刻と第2の時刻とにおける前記特定領域内の変化領域を示す変化領域データとし、
変化領域データを特定の第1の面積で区分し、
変化領域データを特定の第1の面積で区分した各区分データに該区分データ内の点データの個数を設定し、
点データの個数が特定の閾値未満である区分データの点データの個数に0を設定し、
0以外が設定された各区分データの示す各区分に囲まれた区分の区分データに0以外を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分の面積を算出し、算出した面積が特定の第2の面積未満である連結する区分の各区分データに0を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分を各区分データに基づいて直線で近似し、
各区分データに基づいて近似した直線の傾きに基づいて隣り合う各連結する区分の関連を判定し、
関連すると判定した各連結する区分の各区分データを特定領域内の一つの変化領域データと特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項6】
上記変化領域認識装置は、さらに、
画像データを入力し、入力した画像データに基づいて前記変化領域特定部の入力する第2の領域データを生成する領域データ作成部と、
各物体の形状データを記憶する形状データ記憶部とを備え、
前記変化領域認識部は、
前記変化領域特定部の特定した変化領域データと前記形状データ記憶部に記憶された形状データとを比較し、変化領域データと合致した形状データの示す物体を変化領域データに対応する物体と識別する
ことを特徴とする請求項1、請求項4または請求項5いずれかに記載の変化領域認識装置。
【請求項7】
特定領域を示す領域データを記憶管理する領域データベースをアクセスする変化認識システムにおいて、
前記特定領域を撮像して画像データを取得すると共に撮像した位置を示す位置データを記憶するセンサと、
前記センサが任意の時刻に取得した前記特定領域の画像データと撮像した位置を示す位置データとを入力し、入力した画像データと位置データとに基づいて第2の領域データを生成し、第1の領域データとして前記領域データベースから特定領域を示す領域データを取得し、第1の領域データと第2の領域データとに基づいて前記特定領域内の変化領域を示す変化領域データを特定し、特定した変化領域データを領域データとして更新する命令を前記領域データベースに出力して前記領域データベースに領域データを更新させる変化認識装置と
を備えたことを特徴とする変化認識システム。
【請求項8】
前記センサが取得する画像データと前記変化認識装置が生成する領域データと前記変化認識装置が特定する変化領域データとが三次元データであることを特徴とする請求項7記載の変化認識システム。
【請求項9】
前記センサは全周撮像を行う全周撮像装置であることを特徴とする請求項7または請求項8いずれかに記載の変化認識システム。
【請求項10】
前記センサは位置の移動を行い、前記特定領域を異なる位置から撮像して画像データを取得すると共に移動した位置において測位することを特徴とする請求項7〜請求項9いずれかに記載の変化認識システム。
【請求項1】
特定領域を示す第1の領域データと任意の時刻における前記特定領域を示す第2の領域データとを入力し、
入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、
第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、
抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを前記特定領域内の変化領域を示す変化領域データとして特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項2】
変化の起きた特定領域内の変化領域を点データの集合で表す変化領域データを入力し、
入力した変化領域データを表す各点データに基づいて立体的形状を成す変化領域の輪郭を算出し、算出した輪郭を持つ変化領域を表す変化領域データを特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域をベクトルデータとして認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項3】
変化の起きた特定領域内の変化領域を点データの集合で表す変化領域データを入力し、
入力した変化領域データを特定の第1の面積で区分し、
変化領域データを特定の第1の面積で区分した各区分データに該区分データ内の点データの個数を設定し、
点データの個数が特定の閾値未満である区分データの点データの個数に0を設定し、
0以外が設定された各区分データの示す各区分に囲まれた区分の区分データに0以外を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分の面積を算出し、算出した面積が特定の第2の面積未満である連結する区分の各区分データに0を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分を各区分データに基づいて直線で近似し、
各区分データに基づいて近似した直線の傾きに基づいて隣り合う各連結する区分の関連を判定し、
関連すると判定した各連結する区分の各区分データを特定領域内の一つの変化領域データと特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項4】
特定領域を点データの集合で表す第1の領域データと任意の時刻における前記特定領域を点データの集合で表す第2の領域データとを入力し、
入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、
第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、
抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを前記特定領域内の変化領域を示す変化領域データとし、
変化領域データを表す各点データに基づいて変化領域の輪郭を算出し、算出した輪郭を持つ変化領域を表す変化領域データを特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項5】
特定領域を点データの集合で表す第1の領域データと任意の時刻における前記特定領域を点データの集合で表す第2の領域データとを入力し、
入力した第2の領域データに基づいて第1の領域データに対する第2の領域データの誤差範囲を算出し、
第1の領域データと第2の領域データとを比較して第1の領域データと第2の領域データとで相違する第1の領域データの部分データと第2の領域データの部分データとを抽出し、
抽出した第1の領域データの部分データと第2の領域データの部分データとを前記誤差範囲に基づいて比較し、第2の領域データの部分データが第1の領域データの部分データからの前記誤差範囲内に位置しない場合に第2の領域データの部分データを第1の時刻と第2の時刻とにおける前記特定領域内の変化領域を示す変化領域データとし、
変化領域データを特定の第1の面積で区分し、
変化領域データを特定の第1の面積で区分した各区分データに該区分データ内の点データの個数を設定し、
点データの個数が特定の閾値未満である区分データの点データの個数に0を設定し、
0以外が設定された各区分データの示す各区分に囲まれた区分の区分データに0以外を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分の面積を算出し、算出した面積が特定の第2の面積未満である連結する区分の各区分データに0を設定し、
0以外が設定された区分データの示す区分について連結する区分を抽出し、抽出した各連結する区分を各区分データに基づいて直線で近似し、
各区分データに基づいて近似した直線の傾きに基づいて隣り合う各連結する区分の関連を判定し、
関連すると判定した各連結する区分の各区分データを特定領域内の一つの変化領域データと特定する変化領域特定部と、
前記変化領域特定部が特定した変化領域データに基づいて変化領域を認識する変化領域認識部と
を備えたことを特徴とする変化領域認識装置。
【請求項6】
上記変化領域認識装置は、さらに、
画像データを入力し、入力した画像データに基づいて前記変化領域特定部の入力する第2の領域データを生成する領域データ作成部と、
各物体の形状データを記憶する形状データ記憶部とを備え、
前記変化領域認識部は、
前記変化領域特定部の特定した変化領域データと前記形状データ記憶部に記憶された形状データとを比較し、変化領域データと合致した形状データの示す物体を変化領域データに対応する物体と識別する
ことを特徴とする請求項1、請求項4または請求項5いずれかに記載の変化領域認識装置。
【請求項7】
特定領域を示す領域データを記憶管理する領域データベースをアクセスする変化認識システムにおいて、
前記特定領域を撮像して画像データを取得すると共に撮像した位置を示す位置データを記憶するセンサと、
前記センサが任意の時刻に取得した前記特定領域の画像データと撮像した位置を示す位置データとを入力し、入力した画像データと位置データとに基づいて第2の領域データを生成し、第1の領域データとして前記領域データベースから特定領域を示す領域データを取得し、第1の領域データと第2の領域データとに基づいて前記特定領域内の変化領域を示す変化領域データを特定し、特定した変化領域データを領域データとして更新する命令を前記領域データベースに出力して前記領域データベースに領域データを更新させる変化認識装置と
を備えたことを特徴とする変化認識システム。
【請求項8】
前記センサが取得する画像データと前記変化認識装置が生成する領域データと前記変化認識装置が特定する変化領域データとが三次元データであることを特徴とする請求項7記載の変化認識システム。
【請求項9】
前記センサは全周撮像を行う全周撮像装置であることを特徴とする請求項7または請求項8いずれかに記載の変化認識システム。
【請求項10】
前記センサは位置の移動を行い、前記特定領域を異なる位置から撮像して画像データを取得すると共に移動した位置において測位することを特徴とする請求項7〜請求項9いずれかに記載の変化認識システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2006−172099(P2006−172099A)
【公開日】平成18年6月29日(2006.6.29)
【国際特許分類】
【出願番号】特願2004−363092(P2004−363092)
【出願日】平成16年12月15日(2004.12.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(899000068)学校法人早稲田大学 (602)
【Fターム(参考)】
【公開日】平成18年6月29日(2006.6.29)
【国際特許分類】
【出願日】平成16年12月15日(2004.12.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(899000068)学校法人早稲田大学 (602)
【Fターム(参考)】
[ Back to top ]