
変形センサシステム

【課題】検出できる外力付加部位を限定しないようにでき、且つ、外力を検出するための素子に相当する部材の個数を低減することができる変形センサシステムを提供する。
【解決手段】外力を受け得る面状部12aを有し、面状部12aに外力を受けた場合に弾性変形し、その弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる変形センサと、面状部12aの周縁部における所定の対辺のうち一方に接触して配置される第一電極13と、所定の対辺のうち他方に接触して配置され、第一電極13が所定の対辺に接触する接触長よりも長い接触長を有する第二電極14と、第一電極13と第二電極14との間に電圧を印加した場合に、第一電極13と第二電極14との間における外力による変形センサ12の電気抵抗の変化に基づいて、面状部12aのうち外力を受けた位置を検出する検出部22とを備える。
【解決手段】外力を受け得る面状部12aを有し、面状部12aに外力を受けた場合に弾性変形し、その弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる変形センサと、面状部12aの周縁部における所定の対辺のうち一方に接触して配置される第一電極13と、所定の対辺のうち他方に接触して配置され、第一電極13が所定の対辺に接触する接触長よりも長い接触長を有する第二電極14と、第一電極13と第二電極14との間に電圧を印加した場合に、第一電極13と第二電極14との間における外力による変形センサ12の電気抵抗の変化に基づいて、面状部12aのうち外力を受けた位置を検出する検出部22とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、感圧センサ等に用いることができる変形センサシステムに関するものである。
【背景技術】
【0002】
従来、感圧センサとしては、例えば、実開平5−36331号公報(特許文献1)、特開平5−81977号公報(特許文献2)、特開平11−115678号公報(特許文献3)、特開2001−56259号公報(特許文献4)、特開2005−351653号公報(特許文献5)および特開2006−90983号公報(特許文献6)に開示されたものがある。
【0003】
特許文献1および特許文献2に記載の感圧センサは、感圧導電性エラストマー部材の表面に圧力検出用凸部を形成し、その裏面側に電極を配置する構成からなる。この感圧導電性エラストマーは、無加圧時には絶縁性を示し、加圧時に内部の導電性粒子が互いに接近して電気抵抗値が次第に低下することに伴って導電性を示す材料からなる。つまり、圧力検出用凸部に圧力が付加された場合に、その表面と裏面との離間距離が短くなることにより、感圧導電性エラストマー部材が導電性を示すこととなる。そして、この絶縁性から導電性への変化を裏面側の電極により検出して、圧力の付加を検出するというものである。
【0004】
また、特許文献3に記載の感圧センサは、上側感圧インクと下側感圧インクとを備えており、無加圧時には両者は離間しており、加圧時に両者が接触してその間の電気抵抗が変化することにより、圧力の付加を検出するというものである。
【0005】
また、特許文献4に記載の感圧センサは、配線パターンが形成されている下側フィルムと、その下側フィルムに重ね合わさるように離間して配置され感圧抵抗が形成されている上側フィルムとを備えている。つまり、無加圧時には配線パターンと感圧抵抗とが離間しているので導通されず、加圧時に配線パターンと感圧抵抗とが接触することにより導通する。従って、導通することにより発生する電気信号に基づいて、圧力の付加を検出するというものである。
【0006】
また、特許文献5に記載の感圧センサは、基板表面に多数の電極をアレイ状に形成し、それぞれの電極上に導電性感圧ゴムを配置している。また、特許文献6に記載の感圧センサは、面部材を網目状に形成し、その交差部分に多数の圧力センサ素子を配置している。
【特許文献1】実開平5−36331号公報
【特許文献2】特開平5−81977号公報
【特許文献3】特開平11−115678号公報
【特許文献4】特開2001−56259号公報
【特許文献5】特開2005−351653号公報
【特許文献6】特開2006−90983号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかし、従来の感圧センサは、何れも、加圧部位に圧力検出素子に相当する部材が配置されている。例えば、特許文献1および特許文献2においては、導電性へ変化を検出する電極(圧力検出素子)が、加圧部位の裏面側に配置されている。また、特許文献3においては、圧力検出素子に相当する上側感圧インクと下側感圧インクが、加圧部位に配置されている。特許文献4においても、圧力検出素子に相当する配線パターンと感圧抵抗との接触部位が、加圧部位に配置されている。特許文献5および6についても実質的に同様である。
【0008】
このように、圧力検出素子が加圧部位に配置されている構成によれば、当該圧力検出素子が配置された部位への圧力付加を検出することはできるが、その他の部位への圧力付加を検出することはできない。つまり、検出できる圧力付加の部位が限定されている。また、例えば、所定の面の全部位への圧力付加を検出するような感圧センサを構成するとした場合には、面の全部位に多数の圧力検出素子を配置する必要がある。このように多数の電極を面の全部位に配置したとしても、より小さな単位で見ると、やはり検出できる圧力付加の部位が限定されていることになる。従って、従来の構成では、圧力付加の部位が限定されてしまう。多数の圧力検出素子を配置することで、ある程度の圧力付加の部位を限定しないようにできるとしても、この場合には、多数の圧力検出素子を必要とするため、高コスト化を招来する。
【0009】
本発明は、このような事情に鑑みてなされたものであり、検出できる外力付加部位を限定しないようにでき、且つ、外力を検出する素子に相当する部材の個数を低減することができる変形センサシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の変形センサシステムは、外力を受け得る面状部を有し、面状部に外力を受けた場合に弾性変形し、その弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる変形センサと、面状部の周縁部における所定の対辺のうち一方に接触して配置される第一電極と、所定の対辺のうち他方に接触して配置され、第一電極が所定の対辺に接触する接触長よりも長い接触長を有する第二電極と、第一電極と第二電極との間に電圧を印加した場合に、第一電極と第二電極との間における外力による変形センサの電気抵抗の変化に基づいて、面状部のうち外力を受けた位置を検出する検出部とを備えることを特徴とする。
【0011】
まず、本発明の変形センサシステムにおいて、外力を受けた場合に変形センサの面状部における外力を受けた位置を検出できる理由について説明する。
【0012】
本発明における変形センサは、上述したように、弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる。つまり、この弾性材は、無変形時に電気抵抗が最も小さく、変形時に電気抵抗が大きくなる。従って、この弾性材に一定の電圧を印加した場合には、無変形時に最も大きな電流が流れ、変形に応じて電流値が小さくなっていく。
【0013】
つまり、変形センサの面状部に外力を受けていない状態(以下、「無負荷状態」という)が電極間の電気抵抗が最も小さい。従って、この無負荷状態にて電極間に電圧を印加した場合が、電極間に電流は最も流れやすい状態となる。このように、無負荷状態にて、電極間に電流が流れていることになる。一方、変形センサの面状部に外力を受けた状態(以下、「負荷状態」という)には、変形センサが外力により弾性変形し、その結果、第一電極と第二電極の間における変形センサの電気抵抗が大きくなる。さらに、外力を受ける位置によって電気抵抗の変化量は異なるとしても、第一電極と第二電極の間における電気抵抗は、外力を受けることにより必ず増加する。そうすると、印加する電圧を一定とした場合に、電極間に流れる電流は、外力を受けることにより小さくなる。
【0014】
そして、検出部は、第一電極と第二電極との間に電圧を印加した場合に、当該電極間における外力による変形センサの電気抵抗の変化を検出している。例えば、検出部は、当該電極間に電圧を印加した場合に、当該電極間に流れる電流を検出する。この場合、検出部は、無負荷状態にて最大電流を検出し、負荷状態においてはそれより小さい電流を検出することになる。従って、外力を受ける位置がどの位置であっても、検出部は、確実に当該電極間の電気抵抗の変化を検出できる。
【0015】
このように、第一電極と第二電極との間の電気抵抗は、変形センサの面状部が外力を受けることにより変化する。さらに、当該電極間の電気抵抗の変化を検出できるので、確実に変形センサの面状部に外力を受けたことを検出できる。つまり、変形センサの面状部であればどの位置に外力を受けたとしても、外力を受けたことを検出できる。このように、本発明の変形センサシステムによれば、検出できる外力付加部位を限定しないようにできる。
【0016】
ところで、本発明の変形センサシステムは、第一電極と第二電極の2個の電極を備えている。このように、2個の電極のみを用いる場合には、仮に、第一電極が変形センサに接触する接触長と、第二電極が変形センサに接触する接触長が、同一の場合には、変形センサの面状部のうち第一電極側に外力を受けたのか、それとも第二電極側に外力を受けたのかを判別できない。
【0017】
この理由について説明する。上述したように、変形センサは外力を受けることにより電気抵抗が増加する。そして、外力の大きさが同一であっても、外力を受けた位置が異なる場合には、第一電極と第二電極との間における電気抵抗の変化への影響が異なる。具体的には、電極から外力位置までの距離が遠い位置ほど、外力の大きさによる電気抵抗の変化への影響が小さく、電極から外力位置までの距離が近い位置ほど、外力の大きさによる電気抵抗の変化への影響が大きくなる。このように、電極の位置と外力を受ける位置との関係に基づいて、その位置における外力の大きさが電気抵抗の変化への影響度を決定することができる。
【0018】
そして、2個の電極のみを用いる場合には、第一電極と第二電極の中央を境に、第一電極側に所定距離ずれた位置に外力を受けた場合と、第二電極側に同一の所定距離ずれた位置に同一外力を受けた場合とでは、電極間の電気抵抗は同一となる。従って、第一電極が変形センサに接触する接触長と、第二電極が変形センサに接触する接触長が、同一の場合には、変形センサの面状部のうち第一電極側に外力を受けたのか、それとも第二電極側に外力を受けたのかを判別できない。
【0019】
そこで、本発明の変形センサシステムにおいては、第二電極が変形センサに接触する接触長が、第一電極が変形センサに接触する接触長よりも長くしている。これにより、面状部のうち第一電極側に外力を受けた場合と、第二電極側に同一外力を受けた場合とでは、電極間の電気抵抗の変化の影響度が異なる。具体的には、第一電極側に外力を受けた場合には、第二電極側に同一外力を受けた場合に比べて、電極間の電気抵抗の変化が大きくなる。従って、第一電極から外力位置までの距離と、第二電極から外力位置までの距離が、同一であっても、その位置を確実に検出できる。つまり、電極を2個としたとしても、確実に変形センサの面状部において外力を受けた位置を検出できる。
【0020】
また、従来のゴム弾性材料として、例えば、特許文献1および特許文献2などに感圧導電性エラストマーが開示されている。この感圧導電性エラストマーは、無負荷状態においては絶縁性を示し、負荷状態にて内部の導電性粒子が互いに接近して電気抵抗値が次第に低下することに伴って導電性を示す材料からなる。このような性質を有する公知のエラストマーを本発明の変形センサに適用できるか否かについて検討する。
【0021】
このエラストマーのうち外力を受ける面状部を挟むように離隔して複数の電極を配置したとすると、無負荷状態においては電極間に電流が全く流れない状態となる。これは、電極間のエラストマーが絶縁性を示しているためである。そして、電極間全体に亘って加圧により変形した場合にのみ、電極間に電流が流れる。つまり、電極間の一部のみが加圧されて変形した場合には電極間に電流が流れない。従って、電極間の一部のみに加圧された場合に、圧力付加を検出できないことになる。つまり、公知のエラストマーは、本発明の変形センサに適用することができない。
【0022】
また、本発明の変形センサシステムにおいて、所定の対辺が対向する方向に直交する方向の面状部の幅は、所定の対辺の一方端より所定の対辺の他方端の方が広く形成されるとよい。つまり、上述したような第一電極と第二電極との接触長に加えて、面状部そのものの幅を第一電極側と第二電極側とで異ならせるようにする。これにより、面状部のうち第一電極側に外力を受けた場合に、第二電極側に同一外力を受けた場合に比べて、電極間の変形センサの電気抵抗の変化より大きくなる。従って、より高精度に外力を受けた位置を検出できる。
【0023】
特に、所定の対辺が対向する方向に直交する方向の面状部の幅は、一方端から他方端までの間の少なくとも一部において、一方側から他方側に向かって次第に広く形成されるとよい。これにより、面状部の当該幅が変化している部分において、同一外力を受けた場合であっても、その位置に応じて電気抵抗の変化の影響度が異なる。従って、より高精度に外力を受けた位置を検出できる。
【0024】
さらに好ましくは、所定の対辺が対向する方向に直交する方向の面状部の幅は、一方端から他方端に向かって全体に亘って次第に広く形成されるとよい。これにより、第一電極から第二電極までの全体に亘って、その位置に応じて、電気抵抗の変化の影響度が異なることになる。つまり、電極と面状部との接触長の相違による影響度に加えて、面状部の形状の相違による影響度を、相乗的に受けた電気抵抗の変化を検出することで、より確実に外力を受けた位置を検出できる。
【0025】
さらに、上述したように、面状部の形状を第一電極側と第二電極側とで異なるようにする場合には、以下のようにするとよい。すなわち、本発明の変形センサシステムにおいて、第一電極の幅は、面状部の周縁部における所定の対辺の一方端の幅以上とするとよい。さらに、第二電極の幅は、面状部の周縁部における所定の対辺の他方端の幅以上とするとよい。これにより、上述した面状部の形状の影響度をより確実に検出できる。
【0026】
ここで、変形センサの弾性材は、所定のゴムからなるエラストマーと、エラストマー中に略単粒子状態で、且つ、高充填率で配合されている球状の導電性フィラーとを有するものを用いるとよい。ここで、「略単粒子状態」とは、導電性フィラーの全質量を100質量%とした場合の50質量%以上が、凝集した二次粒子としてではなく、単独の一次粒子として存在していることをいう。また、「高充填率で配合」とは、導電性フィラーが最密状近い状態で配合されていることをいう。
【0027】
このように、導電性フィラーが、高充填率(最密状態に近い状態)で配合され、且つ、エラストマー中に一次粒子の状態で存在することにより、変形センサが無加圧時に、導電性フィラーによる三次元的な導電パスが形成される。これに対して、変形センサへの加圧時には、変形センサが弾性変形する。そして、導電性フィラーが最密状態に近い状態で配合されているため、この弾性変形により、導電性フィラー同士が反発し合い、導電性フィラー同士の接触状態が変化する。その結果、無加圧時における三次元的な導電パスが崩壊し、電気抵抗が増加する。つまり、当該弾性材は、弾性変形量が増加するに従って電気抵抗が増加する性質を有することができる。
【発明を実施するための最良の形態】
【0028】
次に、実施形態を挙げ、本発明をより詳しく説明する。
【0029】
(1)変形センサシステムの全体構成
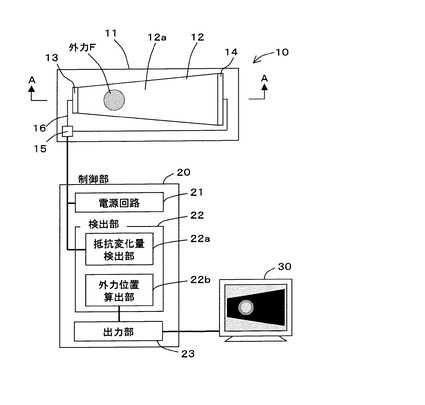
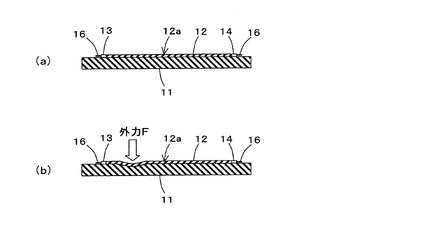
本実施形態の変形センサシステムの全体構成について図1および図2を参照して説明する。図1は、変形センサシステムの全体構成図を示す。図2(a)は、変形センサ12が押圧外力Fを受けていない状態(無負荷状態)における図1のA−A断面図を示す。図2(b)は、変形センサ12が押圧外力Fを受けた状態(負荷状態)における図1のA−A断面図を示す。
【0030】
図1に示すように、変形センサシステムは、センサ構造体10と、制御部20と、モニタ30とから構成される。ここで、本発明の変形センサシステムは、センサ構造体10と制御部20の検出部22とを含むものである。
【0031】
センサ構造体10は、載置板11と、変形センサ12と、第一電極13と、第二電極14と、コネクタ15と、配線16とから構成される。載置板11は、図1および図2(a)(b)に示すように、長方形の平板状からなり、弾力性のある発砲材またはクッション材などからなる。すなわち、載置板11は、図2(b)に示すように、その上面(図2の上側面)を押圧された場合に、押圧部位が凹状に変形する。この載置板11は、例えば、平面の基盤上に配置される。
【0032】
変形センサ12は、弾性変形量が増加するに従って電気抵抗が増加するゴム弾性材からなる。この変形センサ12は、台形の平板状に形成されており、載置板11の上面に重ね合わさるように配置されている。ここで、変形センサ12の上面、すなわち、平板状の広がる面は、図2(a)(b)の下方への押圧外力Fを受け得る面状部12aをなす。つまり、変形センサ12の面状部12aが、その法線方向の押圧外力Fを受けた場合には、図2(b)に示すように、変形センサ12のうち当該押圧外力Fを受けた部位が図2(b)の下方側に向かって湾曲するように曲げ弾性変形する。なお、変形センサ12のゴム弾性材の詳細については、後述する「(2)変形センサ12の材料説明」の項目において説明する。
【0033】
この面状部12aの形状について、より詳細に説明する。面状部12aは、当該面状部12aの周縁部における対辺のうち一方(図1の左端)が台形上辺となり、当該対辺のうち他方(図1の右端)が台形下辺となる。つまり、対辺のうち一方が、対辺のうち他方よりも、広く形成されている。さらに、当該対辺が対向する方向(図1の左右方向)に直交する方向の面状部12aの幅は、図1の左端から右端に向かって全体に亘って次第に広くなるように形成されている。
【0034】
第一電極13は、面状部12aの周縁部における図1の左端に、面状部12aに接触した状態で固定されている。この第一電極13の幅は、面状部12aの図1の左端幅と同一としている。つまり、第一電極13と面状部12aとの接触長は、面状部12aの図1の左端幅に一致するとともに、第一電極13の幅に一致する。
【0035】
第二電極14は、面状部12aの周縁部における図1の右端に、面状部12aに接触した状態で固定されている。この第二電極14の幅は、面状部12aの図1の右端幅と同一としている。そして、第二電極14の幅は、第一電極13の幅より大きい。つまり、第二電極14と面状部12aとの接触長は、面状部12aの図1の右端幅に一致するとともに、第二電極14の幅に一致する。従って、第二電極14が面状部12aに接触する接触長は、第一電極13が面状部12aに接触する接触長よりも長くされている。
【0036】
コネクタ15は、後述する制御部20と電気的接続のための部材である。このコネクタ15は、載置板11の上面のうち図1の左下角部であって、変形センサ12の周縁部よりも外方に配置されている。つまり、コネクタ15は、変形センサ12に対して離隔した位置に配置されている。配線16は、一端が第一電極13および第二電極14のそれぞれに接続され、他端がコネクタ15に接続されている。
【0037】
制御部20は、電源回路21と、検出部22と、出力部23とから構成される。電源回路21は、コネクタ15および配線16を介して第一電極13および第二電極14、並びに、後述する検出部22の抵抗変化量検出部22aに、電気的接続されており、直流電圧Vinを印加する回路である。
【0038】
検出部22は、第一電極13と第二電極14との間に直流電圧Vinを印加した場合に、第一電極13と第二電極14との間における変形センサ12の電気抵抗の変化を検出すると共に、検出した電気抵抗の変化に基づいて変形センサ12の面状部12aのうち押圧外力Fを受けた位置を算出する。出力部23は、検出部22にて算出された面状部12aのうち押圧外力Fを受けた位置をモニタ30に出力する。モニタ30には、変形センサ12の面状部12aに相当する面が表示されており、押圧外力Fを受けた位置を種々の色を用いて表示したり、色の明暗を用いて表示したりする。なお、制御部20の詳細は、後述する「(4)制御部20の詳細説明」の項目において説明する。
【0039】
(2)変形センサ12の材料説明
次に、変形センサ12に用いるゴム弾性材、すなわち弾性変形量が増加するに従って電気抵抗が増加する性質を有するゴム弾性材について、図3を参照して詳細に説明する。図3(a)は、無負荷状態における変形センサ12の断面模式図を示し、図3(b)は、負荷状態における変形センサ12の断面模式図を示す。なお、図3(b)において、無負荷状態の変形センサ12の形状を破線にて示す。
【0040】
この変形センサ12のゴム弾性材は、所定のゴムからなるエラストマー12bと、エラストマー中に略単粒子状態で、且つ、高充填率で配合されている球状の導電性フィラー12cとを有するものである。ここで、所定のゴムからなるエラストマー12b自体は、絶縁性を有している。また、「略単粒子状態」および「高充填率で配合」については、上述した意味である。
【0041】
そして、無負荷状態では、図3(a)に示すように、導電性フィラー12cの多くは、エラストマー12b中に一次粒子状態で存在している。また、導電性フィラー12cの充填率は高く、最密状態で配合されている。これにより、無負荷状態において、変形センサ12には、導電性フィラー12cによる三次元的な導電パスPsが形成されている。従って、無負荷状態では、変形センサ12の電気抵抗が小さくなる。
【0042】
一方、図3(b)に示すように、変形センサ12の面状部12aに外力F(例えば、押圧外力)を受けた場合(負荷状態)には、変形センサ12は弾性変形する。ここで、導電性フィラー12cは最密状態に近い状態で配合されているため、導電性フィラー12cが移動できるスペースがほとんどない。従って、変形センサ12が弾性変形すると、導電性フィラー12c同士が反発し合い、導電性フィラー12c同士の接触状態が変化する。その結果、無負荷状態において形成されていた三次元的な導電パスPsが崩壊し、変形センサ12の電気抵抗が増加する。
【0043】
ここで、変形センサ12において、エラストマー12bに対して導電性フィラー12cの配合量を増加させるにつれて、変形センサ12の電気抵抗は低下する。具体的には、所定量のエラストマー12bに導電性フィラー12cを配合していく場合を考えると、導電性フィラー12cの配合量が少ない状態では、変形センサ12の電気抵抗は大きな値を示す。すなわち、この場合の変形センサ12の電気抵抗は、導電性フィラー12cを配合していない状態におけるエラストマー12b自体の電気抵抗にほとんど等しい。
【0044】
そして、導電性フィラー12cの配合量を増加させて、その配合量が所定の体積分率に達すると、変形センサ12の電気抵抗が急激に低下して、絶縁体−導電体転移が起こる(第一変極点)。この第一変曲点における導電性フィラー12cの配合量(体積%)を、臨界体積分率という。また、さらに導電性フィラー12cの配合量を増加していくと、所定の体積分率から、変形センサ12の電気抵抗の変化量が小さくなり、電気抵抗の変化が飽和する(第二変極点)。この第二変極点における導電性フィラー12cの配合量(体積%)を、飽和体積分率という。このような変形センサ12の電気抵抗の変化は、パーコレーションカーブと呼ばれ、エラストマー12b中に導電性フィラー12cによる導電パスPs(図3(a)に示す)が形成されるためと考えられている。そして、無負荷状態にて導電パスPsを適切に形成することができるために、飽和体積分率が35体積%以上とする。
【0045】
また、他の視点によれば、変形センサ12全体の体積を100体積%とした場合に、導電性フィラー12cの充填率を30体積%以上65体積%以下とするとよい。この場合にも同様に、導電性フィラー12cが一次粒子の状態で存在し、且つ、最密状態に近い状態で配合されているので、無負荷状態にて導電パスPsを適切に形成できる。
【0046】
変形センサ12を形成するゴム弾性材の具体的な一例を以下に挙げる。まず、油展EPDM(住友化学社製「エスプレン(登録商標)6101」)85質量部と、油展EPDM(住友化学社製「エスプレン601」34質量部と、EPDM(住友化学社製「エスプレン505」)30質量部と、酸化亜鉛(共に白水化学工業社製)5質量部と、スチアリン酸(花王社製「ルナック(登録商標)S30」)1部と、パラフィン系プロセスオイル(日本サン石油社製「サンパー(登録商標)110」)20質量部と、をロール練り機にて素練りした。
【0047】
次に、カーボンビーズ(日本カーボン社製「ニカビーズICB0520」)、平均粒子径約5μm、硫度分におけるD90/D10=3.2)270質量部を添加して、ロール練り機にて混合し、分散させた。さらに、加硫促進剤として、ジメチルジチオカルバミン酸亜鉛(大内新興化学社製「ノクセラー(登録商標)PZ−P」)1.5質量部、テトラメチルチウラムジスルフィド(三新化学社製「サンセラー(登録商標)TT−G」)1.5質量部、2−メルカプトベンゾチアゾール(大内新興化学社製「ノクセラーM−P」)0.5質量部と、硫黄(鶴見化学工業社製「サンファックスT−10」)0.56質量部とを添加して、ロール練り機にて混合し、分散させて、エラストマー組成物を調整した。
【0048】
このエラストマー組成物のパーコレーションカープにおける臨界体積分率は、約43体積%、飽和体積分率は約48体積%であった。次に、エラストマー組成物を所定の大きさ(本実施形態では台形板状)に成形して、所定温度でプレス加硫により変形センサ12を成形した。成形された変形センサ12におけるカーボンビーズの充填率は、変形センサ12の体積を100体積%とした場合の約48体積%であった。
【0049】
(3)変形センサ12の電気抵抗の変化特性について
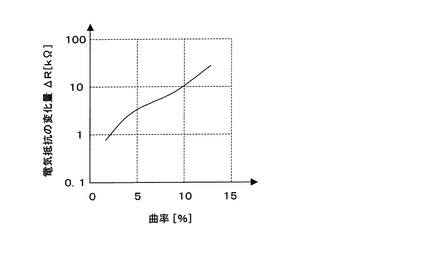
次に、上述したように成形された変形センサ12の電気抵抗の変化特性について、図4および図5を参照して説明する。図4は、変形センサ12が曲げ変形した状態を示す図である。図5は、変形センサ12の曲率Cに対する電気抵抗の変化特性を示す図である。ここでは、変形センサ12の材料そのものの電気抵抗の変化特性を説明するために、変形センサ12の形状を、上述した台形板状とは異なり、長尺板状(長方形の板状)としている。
【0050】
まず、図4に示すように、長尺板状の変形センサ12の両端に電極17を配置した。この両端の電極17は、同一形状としている。この場合に、変形センサ12の中央部に押圧外力Fを付加して、変形センサ12全体が図4の下側に湾曲するように曲げ弾性変形する状態を考える。このとき、無負荷状態における変形センサ12の長手方向長さをLとし、負荷状態における変形センサ12の両端の離間距離をL1とし、LとL1との差を曲げ歪距離Sとした場合に、曲率C(%)は、以下の式(1)により定義する。
【0051】
【数1】

【0052】
そして、押圧外力Fを適宜変更して曲率Cを変化させた状態において、そのときの電極17間の電気抵抗を計測した。この結果は、図5に示すように、曲率Cが増加するに従って、電極17間の電気抵抗が増加している。このことから、変形センサ12の弾性変形量が大きいほど、電気抵抗が増加するということが言える。
【0053】
(4)制御部20の詳細構成
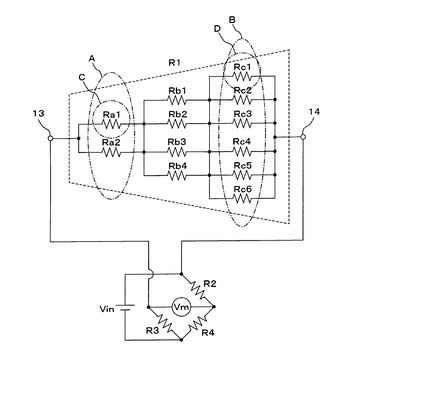
次に、変形センサシステムにおける制御部20の詳細構成について、図1および図6を参照して説明する。図6は、制御部20の検出部22を構成する抵抗変化量検出部22aを説明する図である。
【0054】
制御部20は、図1に示すように、電源回路21と、検出部22と、出力部23とから構成される。電源回路21は、コネクタ15および配線16を介して第一電極13と第二電極14、並びに、後述する検出部22の抵抗変化量検出部22aに、電気的接続されており、直流電圧Vinを印加する回路である。
【0055】
検出部22は、抵抗変化量検出部22aと、外力位置算出部22bとから構成される。抵抗変化量検出部22aは、電源回路21、第一電極13、および、第二電極14に電気的接続されている。そして、抵抗変化量検出部22aは、図6に示すように、第一電極13と第二電極14との間における変形センサ12の電気抵抗を第1抵抗R1とするホイートストン・ブリッジ回路を構成している。また、ホイートストン・ブリッジ回路を構成する第2抵抗R2、第3抵抗R3および第4抵抗R4は、一定の抵抗値としている。ここでは、無負荷状態における第1抵抗R1と第4抵抗R4とを掛け合わせた値が、第2抵抗R2と第3抵抗R3とを掛け合わせた値に等しくなるように、第2抵抗R2、第3抵抗R3および第4抵抗R4を設定する。
【0056】
そして、図6において、印加電圧Vinは、電源回路21により印加される直流電圧である。また、抵抗変化量検出部22aは、ブリッジ中間電位差Vmを検出する。つまり、このブリッジ中間電位差Vmは、第一電極13と第二電極14との間における変形センサ12の第1抵抗R1の変化に伴って変化する。すなわち、抵抗変化量検出部22aは、第一電極13と第二電極14との間に電圧を印加した場合に、第一電極13と第二電極14との間における変形センサ12の第1抵抗R1の変化量ΔR1を検出できる。
【0057】
外力位置算出部22bは、電源回路21により電圧Vinを印加した場合に、抵抗変化量検出部22aにより検出されたΔR1に基づいて、変形センサ12の面状部12aのうち押圧外力Fを受けた位置を算出する。
【0058】
変形センサ12は、上述したように、弾性変形量が増加するに従って電気抵抗が増加するゴム弾性材からなる。そして、第一電極13と第二電極14との間における変形センサ12の第1抵抗R1は、押圧外力Fを受ける位置によって、その影響度が異なる。具体的には、押圧外力Fの位置が、第一電極13または第二電極14から遠いほど、第1抵抗R1の変化量ΔR1として表れる影響度が小さくなる。つまり、第一電極13付近または第二電極14付近に押圧外力Fを受けた場合の方が、第一電極13と第二電極14の中央付近に同一の押圧外力Fを受けた場合に比べて、第一電極13と第二電極14との間の第1抵抗の変化量ΔR1が大きくなる。従って、第一電極13と第二電極14との間の第1抵抗の変化量ΔR1に基づいて、押圧外力Fを受けた位置が、第一電極13または第二電極14からどの距離にあるかを判断することができる。
【0059】
さらに、変形センサ12は、第一電極13側から第二電極14側に向かって幅広の台形板状からなる。従って、第1抵抗R1は、模式的に示すと、図6に示すように、第一電極13側から第二電極14側に向かって並列接続される抵抗の数が増加するような関係となる。つまり、第1抵抗R1は、式(2)により表すことができる。
【0060】
【数2】
【0061】
ここで、無負荷状態においては、上記式(2)における各抵抗Ra1、Ra2、・・・、Rc5、Rc6が、同一のものとする。つまり、無負荷状態においては、各抵抗Ra1、Ra2、・・・、Rc5、Rc6をrとした場合には、式(2)は、式(3)のように表すことができる。
【0062】
【数3】
【0063】
そして、変形センサ12の何れの位置に押圧外力Fを受けたとしても、何れかの抵抗が増加するため、結果として第1抵抗R1は増加する。
【0064】
ここで、図6に示す「A」の範囲に押圧外力Fを受けた場合と、「B」の範囲に押圧外力Fを受けた場合とを比較する。「A」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Ra1、Ra2の抵抗値が増加する。また、「B」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Rc1〜Rc6の抵抗値が増加する。このとき、押圧外力Fを同一とし、それぞれの抵抗値の増加量が等しいとする。そして、「A」の範囲に押圧外力Fを受けた場合には、式(3)の第一項のrが増加することになり、「B」の範囲に押圧外力Fを受けた場合には、式(3)の第三項のrが増加することになる。つまり、「A」の範囲に押圧外力Fを受けた場合の方が、「B」の範囲に押圧外力Fを受けた場合に比べて、第1抵抗R1の増加量が大きくなる。
【0065】
また、図6に示す「C」の範囲に押圧外力Fを受けた場合と、「D」の範囲に押圧外力Fを受けた場合とを比較する。「C」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Ra1の抵抗値が増加する。また、「D」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Rc1の抵抗値が増加する。これらの場合において、それぞれの抵抗値の増加量が等しいとした場合には、式(2)より、「C」の範囲に押圧外力Fを受けた場合の方が、「D」の範囲に押圧外力Fを受けた場合に比べて、第1抵抗R1の増加量が大きくなる。
【0066】
このように、変形センサ12の面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1が異なる変化をする。従って、外力位置算出部22bは、抵抗変化量検出部22aにより検出された第1抵抗の変化量ΔR1に基づいて、第一電極13と第二電極とを結ぶ軸方向において、押圧外力Fを受ける位置を判別することができる。
【0067】
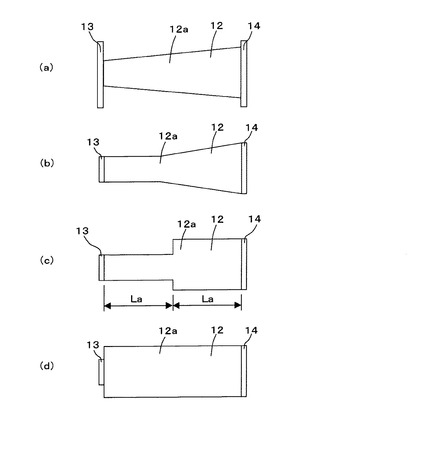
<その他の実施形態>
変形センサ12の変形態様について図7を参照して説明する。図7は、変形センサ12の変形態様を示す図である。図7(a)に示すように、第一電極13の幅を第二電極14の幅と同一ものを使用し、さらに、これらの電極13、14の幅は、面状部12aの対辺の他方(図7(a)の右端)の幅よりも大きくしている。変形センサ12は上記実施形態と同一形状からなる。従って、第一電極13と変形センサ12との接触長、および、第二電極14と変形センサ12の接触長は、上記実施形態と同一である。この場合、第一電極13と第二電極14との間の電気抵抗R1の変化量は、上記実施形態と同様となる。従って、上記実施形態と同様の作用効果を奏する。
【0068】
また、図7(b)に示すように、変形センサ12を、第一電極13側の部分を同一幅からなるようにし、第二電極14側の部分を台形状としている。この場合も、面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1の変化量ΔR1が異なる。従って、押圧外力Fの位置を算出できる。ただし、上記実施形態に比べて、同一幅からなる部分により、第1抵抗R1の変化への影響度が小さくなる。従って、検出精度は、上記実施形態の方がよい。
【0069】
また、図7(c)に示すように、変形センサ12を、第一電極13側の部分を同一幅とし、第二電極14側の部分を第一電極13側よりも大きな幅であって同一幅とする。そして、第一電極13側の小幅部分の長さLaと、第二電極14側の大幅部分の長さLaとは、同一としている。この場合も、面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1の変化量ΔR1が異なる。従って、押圧外力Fの位置を算出できる。ただし、検出精度は、上記実施形態の方がよい。さらには、検出精度は、同一幅の部分が存在しない図7(b)の場合の方がよい。
【0070】
また、図7(d)に示すように、変形センサ12の幅を、第一電極13から第二電極14に向かって全てに亘って同一幅とする。そして、この変形センサ12の幅は、第二電極14の幅と同一とする。この場合も、面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1の変化量ΔR1が異なる。この理由は、変形センサ12のうち第一電極13付近において、第一電極13に接触していない部分は、ほとんど影響を及ぼさないためである。つまり、この場合の変形センサ12の抵抗分布としては、上記実施形態と近似した関係となるためである。ただし、この場合には、当該部分の影響を少なからず受けるため、当該影響を受けない上記実施形態の方が検出精度がよい。
【図面の簡単な説明】
【0071】
【図1】変形センサシステムの全体構成図である。
【図2】無負荷状態および負荷状態における図1のA−A断面図である。
【図3】無負荷状態および負荷状態における変形センサ12の断面模式図である。
【図4】変形センサ12が曲げ変形した状態を示す図である。
【図5】変形センサ12の曲率Cに対する電気抵抗の変化特性を示す図である。
【図6】制御部20の検出部22を構成する抵抗変化量検出部22aを説明する図を示す。
【図7】変形センサ12の変形態様を示す図である。
【符号の説明】
【0072】
10:センサ構造体、 20:制御部、 30:モニタ、
11:載置板、 12:変形センサ、 12a:面状部、 12b:エラストマー、
12c:導電性フィラー、
13:第一電極、 14:第二電極、 15:コネクタ、 16:配線、
17:電極、
21:電源回路、 22:検出部、 23:出力部、
22a:抵抗変化量検出部、 22b:外力位置算出部、
Ps:導電パス
【技術分野】
【0001】
本発明は、例えば、感圧センサ等に用いることができる変形センサシステムに関するものである。
【背景技術】
【0002】
従来、感圧センサとしては、例えば、実開平5−36331号公報(特許文献1)、特開平5−81977号公報(特許文献2)、特開平11−115678号公報(特許文献3)、特開2001−56259号公報(特許文献4)、特開2005−351653号公報(特許文献5)および特開2006−90983号公報(特許文献6)に開示されたものがある。
【0003】
特許文献1および特許文献2に記載の感圧センサは、感圧導電性エラストマー部材の表面に圧力検出用凸部を形成し、その裏面側に電極を配置する構成からなる。この感圧導電性エラストマーは、無加圧時には絶縁性を示し、加圧時に内部の導電性粒子が互いに接近して電気抵抗値が次第に低下することに伴って導電性を示す材料からなる。つまり、圧力検出用凸部に圧力が付加された場合に、その表面と裏面との離間距離が短くなることにより、感圧導電性エラストマー部材が導電性を示すこととなる。そして、この絶縁性から導電性への変化を裏面側の電極により検出して、圧力の付加を検出するというものである。
【0004】
また、特許文献3に記載の感圧センサは、上側感圧インクと下側感圧インクとを備えており、無加圧時には両者は離間しており、加圧時に両者が接触してその間の電気抵抗が変化することにより、圧力の付加を検出するというものである。
【0005】
また、特許文献4に記載の感圧センサは、配線パターンが形成されている下側フィルムと、その下側フィルムに重ね合わさるように離間して配置され感圧抵抗が形成されている上側フィルムとを備えている。つまり、無加圧時には配線パターンと感圧抵抗とが離間しているので導通されず、加圧時に配線パターンと感圧抵抗とが接触することにより導通する。従って、導通することにより発生する電気信号に基づいて、圧力の付加を検出するというものである。
【0006】
また、特許文献5に記載の感圧センサは、基板表面に多数の電極をアレイ状に形成し、それぞれの電極上に導電性感圧ゴムを配置している。また、特許文献6に記載の感圧センサは、面部材を網目状に形成し、その交差部分に多数の圧力センサ素子を配置している。
【特許文献1】実開平5−36331号公報
【特許文献2】特開平5−81977号公報
【特許文献3】特開平11−115678号公報
【特許文献4】特開2001−56259号公報
【特許文献5】特開2005−351653号公報
【特許文献6】特開2006−90983号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかし、従来の感圧センサは、何れも、加圧部位に圧力検出素子に相当する部材が配置されている。例えば、特許文献1および特許文献2においては、導電性へ変化を検出する電極(圧力検出素子)が、加圧部位の裏面側に配置されている。また、特許文献3においては、圧力検出素子に相当する上側感圧インクと下側感圧インクが、加圧部位に配置されている。特許文献4においても、圧力検出素子に相当する配線パターンと感圧抵抗との接触部位が、加圧部位に配置されている。特許文献5および6についても実質的に同様である。
【0008】
このように、圧力検出素子が加圧部位に配置されている構成によれば、当該圧力検出素子が配置された部位への圧力付加を検出することはできるが、その他の部位への圧力付加を検出することはできない。つまり、検出できる圧力付加の部位が限定されている。また、例えば、所定の面の全部位への圧力付加を検出するような感圧センサを構成するとした場合には、面の全部位に多数の圧力検出素子を配置する必要がある。このように多数の電極を面の全部位に配置したとしても、より小さな単位で見ると、やはり検出できる圧力付加の部位が限定されていることになる。従って、従来の構成では、圧力付加の部位が限定されてしまう。多数の圧力検出素子を配置することで、ある程度の圧力付加の部位を限定しないようにできるとしても、この場合には、多数の圧力検出素子を必要とするため、高コスト化を招来する。
【0009】
本発明は、このような事情に鑑みてなされたものであり、検出できる外力付加部位を限定しないようにでき、且つ、外力を検出する素子に相当する部材の個数を低減することができる変形センサシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の変形センサシステムは、外力を受け得る面状部を有し、面状部に外力を受けた場合に弾性変形し、その弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる変形センサと、面状部の周縁部における所定の対辺のうち一方に接触して配置される第一電極と、所定の対辺のうち他方に接触して配置され、第一電極が所定の対辺に接触する接触長よりも長い接触長を有する第二電極と、第一電極と第二電極との間に電圧を印加した場合に、第一電極と第二電極との間における外力による変形センサの電気抵抗の変化に基づいて、面状部のうち外力を受けた位置を検出する検出部とを備えることを特徴とする。
【0011】
まず、本発明の変形センサシステムにおいて、外力を受けた場合に変形センサの面状部における外力を受けた位置を検出できる理由について説明する。
【0012】
本発明における変形センサは、上述したように、弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる。つまり、この弾性材は、無変形時に電気抵抗が最も小さく、変形時に電気抵抗が大きくなる。従って、この弾性材に一定の電圧を印加した場合には、無変形時に最も大きな電流が流れ、変形に応じて電流値が小さくなっていく。
【0013】
つまり、変形センサの面状部に外力を受けていない状態(以下、「無負荷状態」という)が電極間の電気抵抗が最も小さい。従って、この無負荷状態にて電極間に電圧を印加した場合が、電極間に電流は最も流れやすい状態となる。このように、無負荷状態にて、電極間に電流が流れていることになる。一方、変形センサの面状部に外力を受けた状態(以下、「負荷状態」という)には、変形センサが外力により弾性変形し、その結果、第一電極と第二電極の間における変形センサの電気抵抗が大きくなる。さらに、外力を受ける位置によって電気抵抗の変化量は異なるとしても、第一電極と第二電極の間における電気抵抗は、外力を受けることにより必ず増加する。そうすると、印加する電圧を一定とした場合に、電極間に流れる電流は、外力を受けることにより小さくなる。
【0014】
そして、検出部は、第一電極と第二電極との間に電圧を印加した場合に、当該電極間における外力による変形センサの電気抵抗の変化を検出している。例えば、検出部は、当該電極間に電圧を印加した場合に、当該電極間に流れる電流を検出する。この場合、検出部は、無負荷状態にて最大電流を検出し、負荷状態においてはそれより小さい電流を検出することになる。従って、外力を受ける位置がどの位置であっても、検出部は、確実に当該電極間の電気抵抗の変化を検出できる。
【0015】
このように、第一電極と第二電極との間の電気抵抗は、変形センサの面状部が外力を受けることにより変化する。さらに、当該電極間の電気抵抗の変化を検出できるので、確実に変形センサの面状部に外力を受けたことを検出できる。つまり、変形センサの面状部であればどの位置に外力を受けたとしても、外力を受けたことを検出できる。このように、本発明の変形センサシステムによれば、検出できる外力付加部位を限定しないようにできる。
【0016】
ところで、本発明の変形センサシステムは、第一電極と第二電極の2個の電極を備えている。このように、2個の電極のみを用いる場合には、仮に、第一電極が変形センサに接触する接触長と、第二電極が変形センサに接触する接触長が、同一の場合には、変形センサの面状部のうち第一電極側に外力を受けたのか、それとも第二電極側に外力を受けたのかを判別できない。
【0017】
この理由について説明する。上述したように、変形センサは外力を受けることにより電気抵抗が増加する。そして、外力の大きさが同一であっても、外力を受けた位置が異なる場合には、第一電極と第二電極との間における電気抵抗の変化への影響が異なる。具体的には、電極から外力位置までの距離が遠い位置ほど、外力の大きさによる電気抵抗の変化への影響が小さく、電極から外力位置までの距離が近い位置ほど、外力の大きさによる電気抵抗の変化への影響が大きくなる。このように、電極の位置と外力を受ける位置との関係に基づいて、その位置における外力の大きさが電気抵抗の変化への影響度を決定することができる。
【0018】
そして、2個の電極のみを用いる場合には、第一電極と第二電極の中央を境に、第一電極側に所定距離ずれた位置に外力を受けた場合と、第二電極側に同一の所定距離ずれた位置に同一外力を受けた場合とでは、電極間の電気抵抗は同一となる。従って、第一電極が変形センサに接触する接触長と、第二電極が変形センサに接触する接触長が、同一の場合には、変形センサの面状部のうち第一電極側に外力を受けたのか、それとも第二電極側に外力を受けたのかを判別できない。
【0019】
そこで、本発明の変形センサシステムにおいては、第二電極が変形センサに接触する接触長が、第一電極が変形センサに接触する接触長よりも長くしている。これにより、面状部のうち第一電極側に外力を受けた場合と、第二電極側に同一外力を受けた場合とでは、電極間の電気抵抗の変化の影響度が異なる。具体的には、第一電極側に外力を受けた場合には、第二電極側に同一外力を受けた場合に比べて、電極間の電気抵抗の変化が大きくなる。従って、第一電極から外力位置までの距離と、第二電極から外力位置までの距離が、同一であっても、その位置を確実に検出できる。つまり、電極を2個としたとしても、確実に変形センサの面状部において外力を受けた位置を検出できる。
【0020】
また、従来のゴム弾性材料として、例えば、特許文献1および特許文献2などに感圧導電性エラストマーが開示されている。この感圧導電性エラストマーは、無負荷状態においては絶縁性を示し、負荷状態にて内部の導電性粒子が互いに接近して電気抵抗値が次第に低下することに伴って導電性を示す材料からなる。このような性質を有する公知のエラストマーを本発明の変形センサに適用できるか否かについて検討する。
【0021】
このエラストマーのうち外力を受ける面状部を挟むように離隔して複数の電極を配置したとすると、無負荷状態においては電極間に電流が全く流れない状態となる。これは、電極間のエラストマーが絶縁性を示しているためである。そして、電極間全体に亘って加圧により変形した場合にのみ、電極間に電流が流れる。つまり、電極間の一部のみが加圧されて変形した場合には電極間に電流が流れない。従って、電極間の一部のみに加圧された場合に、圧力付加を検出できないことになる。つまり、公知のエラストマーは、本発明の変形センサに適用することができない。
【0022】
また、本発明の変形センサシステムにおいて、所定の対辺が対向する方向に直交する方向の面状部の幅は、所定の対辺の一方端より所定の対辺の他方端の方が広く形成されるとよい。つまり、上述したような第一電極と第二電極との接触長に加えて、面状部そのものの幅を第一電極側と第二電極側とで異ならせるようにする。これにより、面状部のうち第一電極側に外力を受けた場合に、第二電極側に同一外力を受けた場合に比べて、電極間の変形センサの電気抵抗の変化より大きくなる。従って、より高精度に外力を受けた位置を検出できる。
【0023】
特に、所定の対辺が対向する方向に直交する方向の面状部の幅は、一方端から他方端までの間の少なくとも一部において、一方側から他方側に向かって次第に広く形成されるとよい。これにより、面状部の当該幅が変化している部分において、同一外力を受けた場合であっても、その位置に応じて電気抵抗の変化の影響度が異なる。従って、より高精度に外力を受けた位置を検出できる。
【0024】
さらに好ましくは、所定の対辺が対向する方向に直交する方向の面状部の幅は、一方端から他方端に向かって全体に亘って次第に広く形成されるとよい。これにより、第一電極から第二電極までの全体に亘って、その位置に応じて、電気抵抗の変化の影響度が異なることになる。つまり、電極と面状部との接触長の相違による影響度に加えて、面状部の形状の相違による影響度を、相乗的に受けた電気抵抗の変化を検出することで、より確実に外力を受けた位置を検出できる。
【0025】
さらに、上述したように、面状部の形状を第一電極側と第二電極側とで異なるようにする場合には、以下のようにするとよい。すなわち、本発明の変形センサシステムにおいて、第一電極の幅は、面状部の周縁部における所定の対辺の一方端の幅以上とするとよい。さらに、第二電極の幅は、面状部の周縁部における所定の対辺の他方端の幅以上とするとよい。これにより、上述した面状部の形状の影響度をより確実に検出できる。
【0026】
ここで、変形センサの弾性材は、所定のゴムからなるエラストマーと、エラストマー中に略単粒子状態で、且つ、高充填率で配合されている球状の導電性フィラーとを有するものを用いるとよい。ここで、「略単粒子状態」とは、導電性フィラーの全質量を100質量%とした場合の50質量%以上が、凝集した二次粒子としてではなく、単独の一次粒子として存在していることをいう。また、「高充填率で配合」とは、導電性フィラーが最密状近い状態で配合されていることをいう。
【0027】
このように、導電性フィラーが、高充填率(最密状態に近い状態)で配合され、且つ、エラストマー中に一次粒子の状態で存在することにより、変形センサが無加圧時に、導電性フィラーによる三次元的な導電パスが形成される。これに対して、変形センサへの加圧時には、変形センサが弾性変形する。そして、導電性フィラーが最密状態に近い状態で配合されているため、この弾性変形により、導電性フィラー同士が反発し合い、導電性フィラー同士の接触状態が変化する。その結果、無加圧時における三次元的な導電パスが崩壊し、電気抵抗が増加する。つまり、当該弾性材は、弾性変形量が増加するに従って電気抵抗が増加する性質を有することができる。
【発明を実施するための最良の形態】
【0028】
次に、実施形態を挙げ、本発明をより詳しく説明する。
【0029】
(1)変形センサシステムの全体構成
本実施形態の変形センサシステムの全体構成について図1および図2を参照して説明する。図1は、変形センサシステムの全体構成図を示す。図2(a)は、変形センサ12が押圧外力Fを受けていない状態(無負荷状態)における図1のA−A断面図を示す。図2(b)は、変形センサ12が押圧外力Fを受けた状態(負荷状態)における図1のA−A断面図を示す。
【0030】
図1に示すように、変形センサシステムは、センサ構造体10と、制御部20と、モニタ30とから構成される。ここで、本発明の変形センサシステムは、センサ構造体10と制御部20の検出部22とを含むものである。
【0031】
センサ構造体10は、載置板11と、変形センサ12と、第一電極13と、第二電極14と、コネクタ15と、配線16とから構成される。載置板11は、図1および図2(a)(b)に示すように、長方形の平板状からなり、弾力性のある発砲材またはクッション材などからなる。すなわち、載置板11は、図2(b)に示すように、その上面(図2の上側面)を押圧された場合に、押圧部位が凹状に変形する。この載置板11は、例えば、平面の基盤上に配置される。
【0032】
変形センサ12は、弾性変形量が増加するに従って電気抵抗が増加するゴム弾性材からなる。この変形センサ12は、台形の平板状に形成されており、載置板11の上面に重ね合わさるように配置されている。ここで、変形センサ12の上面、すなわち、平板状の広がる面は、図2(a)(b)の下方への押圧外力Fを受け得る面状部12aをなす。つまり、変形センサ12の面状部12aが、その法線方向の押圧外力Fを受けた場合には、図2(b)に示すように、変形センサ12のうち当該押圧外力Fを受けた部位が図2(b)の下方側に向かって湾曲するように曲げ弾性変形する。なお、変形センサ12のゴム弾性材の詳細については、後述する「(2)変形センサ12の材料説明」の項目において説明する。
【0033】
この面状部12aの形状について、より詳細に説明する。面状部12aは、当該面状部12aの周縁部における対辺のうち一方(図1の左端)が台形上辺となり、当該対辺のうち他方(図1の右端)が台形下辺となる。つまり、対辺のうち一方が、対辺のうち他方よりも、広く形成されている。さらに、当該対辺が対向する方向(図1の左右方向)に直交する方向の面状部12aの幅は、図1の左端から右端に向かって全体に亘って次第に広くなるように形成されている。
【0034】
第一電極13は、面状部12aの周縁部における図1の左端に、面状部12aに接触した状態で固定されている。この第一電極13の幅は、面状部12aの図1の左端幅と同一としている。つまり、第一電極13と面状部12aとの接触長は、面状部12aの図1の左端幅に一致するとともに、第一電極13の幅に一致する。
【0035】
第二電極14は、面状部12aの周縁部における図1の右端に、面状部12aに接触した状態で固定されている。この第二電極14の幅は、面状部12aの図1の右端幅と同一としている。そして、第二電極14の幅は、第一電極13の幅より大きい。つまり、第二電極14と面状部12aとの接触長は、面状部12aの図1の右端幅に一致するとともに、第二電極14の幅に一致する。従って、第二電極14が面状部12aに接触する接触長は、第一電極13が面状部12aに接触する接触長よりも長くされている。
【0036】
コネクタ15は、後述する制御部20と電気的接続のための部材である。このコネクタ15は、載置板11の上面のうち図1の左下角部であって、変形センサ12の周縁部よりも外方に配置されている。つまり、コネクタ15は、変形センサ12に対して離隔した位置に配置されている。配線16は、一端が第一電極13および第二電極14のそれぞれに接続され、他端がコネクタ15に接続されている。
【0037】
制御部20は、電源回路21と、検出部22と、出力部23とから構成される。電源回路21は、コネクタ15および配線16を介して第一電極13および第二電極14、並びに、後述する検出部22の抵抗変化量検出部22aに、電気的接続されており、直流電圧Vinを印加する回路である。
【0038】
検出部22は、第一電極13と第二電極14との間に直流電圧Vinを印加した場合に、第一電極13と第二電極14との間における変形センサ12の電気抵抗の変化を検出すると共に、検出した電気抵抗の変化に基づいて変形センサ12の面状部12aのうち押圧外力Fを受けた位置を算出する。出力部23は、検出部22にて算出された面状部12aのうち押圧外力Fを受けた位置をモニタ30に出力する。モニタ30には、変形センサ12の面状部12aに相当する面が表示されており、押圧外力Fを受けた位置を種々の色を用いて表示したり、色の明暗を用いて表示したりする。なお、制御部20の詳細は、後述する「(4)制御部20の詳細説明」の項目において説明する。
【0039】
(2)変形センサ12の材料説明
次に、変形センサ12に用いるゴム弾性材、すなわち弾性変形量が増加するに従って電気抵抗が増加する性質を有するゴム弾性材について、図3を参照して詳細に説明する。図3(a)は、無負荷状態における変形センサ12の断面模式図を示し、図3(b)は、負荷状態における変形センサ12の断面模式図を示す。なお、図3(b)において、無負荷状態の変形センサ12の形状を破線にて示す。
【0040】
この変形センサ12のゴム弾性材は、所定のゴムからなるエラストマー12bと、エラストマー中に略単粒子状態で、且つ、高充填率で配合されている球状の導電性フィラー12cとを有するものである。ここで、所定のゴムからなるエラストマー12b自体は、絶縁性を有している。また、「略単粒子状態」および「高充填率で配合」については、上述した意味である。
【0041】
そして、無負荷状態では、図3(a)に示すように、導電性フィラー12cの多くは、エラストマー12b中に一次粒子状態で存在している。また、導電性フィラー12cの充填率は高く、最密状態で配合されている。これにより、無負荷状態において、変形センサ12には、導電性フィラー12cによる三次元的な導電パスPsが形成されている。従って、無負荷状態では、変形センサ12の電気抵抗が小さくなる。
【0042】
一方、図3(b)に示すように、変形センサ12の面状部12aに外力F(例えば、押圧外力)を受けた場合(負荷状態)には、変形センサ12は弾性変形する。ここで、導電性フィラー12cは最密状態に近い状態で配合されているため、導電性フィラー12cが移動できるスペースがほとんどない。従って、変形センサ12が弾性変形すると、導電性フィラー12c同士が反発し合い、導電性フィラー12c同士の接触状態が変化する。その結果、無負荷状態において形成されていた三次元的な導電パスPsが崩壊し、変形センサ12の電気抵抗が増加する。
【0043】
ここで、変形センサ12において、エラストマー12bに対して導電性フィラー12cの配合量を増加させるにつれて、変形センサ12の電気抵抗は低下する。具体的には、所定量のエラストマー12bに導電性フィラー12cを配合していく場合を考えると、導電性フィラー12cの配合量が少ない状態では、変形センサ12の電気抵抗は大きな値を示す。すなわち、この場合の変形センサ12の電気抵抗は、導電性フィラー12cを配合していない状態におけるエラストマー12b自体の電気抵抗にほとんど等しい。
【0044】
そして、導電性フィラー12cの配合量を増加させて、その配合量が所定の体積分率に達すると、変形センサ12の電気抵抗が急激に低下して、絶縁体−導電体転移が起こる(第一変極点)。この第一変曲点における導電性フィラー12cの配合量(体積%)を、臨界体積分率という。また、さらに導電性フィラー12cの配合量を増加していくと、所定の体積分率から、変形センサ12の電気抵抗の変化量が小さくなり、電気抵抗の変化が飽和する(第二変極点)。この第二変極点における導電性フィラー12cの配合量(体積%)を、飽和体積分率という。このような変形センサ12の電気抵抗の変化は、パーコレーションカーブと呼ばれ、エラストマー12b中に導電性フィラー12cによる導電パスPs(図3(a)に示す)が形成されるためと考えられている。そして、無負荷状態にて導電パスPsを適切に形成することができるために、飽和体積分率が35体積%以上とする。
【0045】
また、他の視点によれば、変形センサ12全体の体積を100体積%とした場合に、導電性フィラー12cの充填率を30体積%以上65体積%以下とするとよい。この場合にも同様に、導電性フィラー12cが一次粒子の状態で存在し、且つ、最密状態に近い状態で配合されているので、無負荷状態にて導電パスPsを適切に形成できる。
【0046】
変形センサ12を形成するゴム弾性材の具体的な一例を以下に挙げる。まず、油展EPDM(住友化学社製「エスプレン(登録商標)6101」)85質量部と、油展EPDM(住友化学社製「エスプレン601」34質量部と、EPDM(住友化学社製「エスプレン505」)30質量部と、酸化亜鉛(共に白水化学工業社製)5質量部と、スチアリン酸(花王社製「ルナック(登録商標)S30」)1部と、パラフィン系プロセスオイル(日本サン石油社製「サンパー(登録商標)110」)20質量部と、をロール練り機にて素練りした。
【0047】
次に、カーボンビーズ(日本カーボン社製「ニカビーズICB0520」)、平均粒子径約5μm、硫度分におけるD90/D10=3.2)270質量部を添加して、ロール練り機にて混合し、分散させた。さらに、加硫促進剤として、ジメチルジチオカルバミン酸亜鉛(大内新興化学社製「ノクセラー(登録商標)PZ−P」)1.5質量部、テトラメチルチウラムジスルフィド(三新化学社製「サンセラー(登録商標)TT−G」)1.5質量部、2−メルカプトベンゾチアゾール(大内新興化学社製「ノクセラーM−P」)0.5質量部と、硫黄(鶴見化学工業社製「サンファックスT−10」)0.56質量部とを添加して、ロール練り機にて混合し、分散させて、エラストマー組成物を調整した。
【0048】
このエラストマー組成物のパーコレーションカープにおける臨界体積分率は、約43体積%、飽和体積分率は約48体積%であった。次に、エラストマー組成物を所定の大きさ(本実施形態では台形板状)に成形して、所定温度でプレス加硫により変形センサ12を成形した。成形された変形センサ12におけるカーボンビーズの充填率は、変形センサ12の体積を100体積%とした場合の約48体積%であった。
【0049】
(3)変形センサ12の電気抵抗の変化特性について
次に、上述したように成形された変形センサ12の電気抵抗の変化特性について、図4および図5を参照して説明する。図4は、変形センサ12が曲げ変形した状態を示す図である。図5は、変形センサ12の曲率Cに対する電気抵抗の変化特性を示す図である。ここでは、変形センサ12の材料そのものの電気抵抗の変化特性を説明するために、変形センサ12の形状を、上述した台形板状とは異なり、長尺板状(長方形の板状)としている。
【0050】
まず、図4に示すように、長尺板状の変形センサ12の両端に電極17を配置した。この両端の電極17は、同一形状としている。この場合に、変形センサ12の中央部に押圧外力Fを付加して、変形センサ12全体が図4の下側に湾曲するように曲げ弾性変形する状態を考える。このとき、無負荷状態における変形センサ12の長手方向長さをLとし、負荷状態における変形センサ12の両端の離間距離をL1とし、LとL1との差を曲げ歪距離Sとした場合に、曲率C(%)は、以下の式(1)により定義する。
【0051】
【数1】
【0052】
そして、押圧外力Fを適宜変更して曲率Cを変化させた状態において、そのときの電極17間の電気抵抗を計測した。この結果は、図5に示すように、曲率Cが増加するに従って、電極17間の電気抵抗が増加している。このことから、変形センサ12の弾性変形量が大きいほど、電気抵抗が増加するということが言える。
【0053】
(4)制御部20の詳細構成
次に、変形センサシステムにおける制御部20の詳細構成について、図1および図6を参照して説明する。図6は、制御部20の検出部22を構成する抵抗変化量検出部22aを説明する図である。
【0054】
制御部20は、図1に示すように、電源回路21と、検出部22と、出力部23とから構成される。電源回路21は、コネクタ15および配線16を介して第一電極13と第二電極14、並びに、後述する検出部22の抵抗変化量検出部22aに、電気的接続されており、直流電圧Vinを印加する回路である。
【0055】
検出部22は、抵抗変化量検出部22aと、外力位置算出部22bとから構成される。抵抗変化量検出部22aは、電源回路21、第一電極13、および、第二電極14に電気的接続されている。そして、抵抗変化量検出部22aは、図6に示すように、第一電極13と第二電極14との間における変形センサ12の電気抵抗を第1抵抗R1とするホイートストン・ブリッジ回路を構成している。また、ホイートストン・ブリッジ回路を構成する第2抵抗R2、第3抵抗R3および第4抵抗R4は、一定の抵抗値としている。ここでは、無負荷状態における第1抵抗R1と第4抵抗R4とを掛け合わせた値が、第2抵抗R2と第3抵抗R3とを掛け合わせた値に等しくなるように、第2抵抗R2、第3抵抗R3および第4抵抗R4を設定する。
【0056】
そして、図6において、印加電圧Vinは、電源回路21により印加される直流電圧である。また、抵抗変化量検出部22aは、ブリッジ中間電位差Vmを検出する。つまり、このブリッジ中間電位差Vmは、第一電極13と第二電極14との間における変形センサ12の第1抵抗R1の変化に伴って変化する。すなわち、抵抗変化量検出部22aは、第一電極13と第二電極14との間に電圧を印加した場合に、第一電極13と第二電極14との間における変形センサ12の第1抵抗R1の変化量ΔR1を検出できる。
【0057】
外力位置算出部22bは、電源回路21により電圧Vinを印加した場合に、抵抗変化量検出部22aにより検出されたΔR1に基づいて、変形センサ12の面状部12aのうち押圧外力Fを受けた位置を算出する。
【0058】
変形センサ12は、上述したように、弾性変形量が増加するに従って電気抵抗が増加するゴム弾性材からなる。そして、第一電極13と第二電極14との間における変形センサ12の第1抵抗R1は、押圧外力Fを受ける位置によって、その影響度が異なる。具体的には、押圧外力Fの位置が、第一電極13または第二電極14から遠いほど、第1抵抗R1の変化量ΔR1として表れる影響度が小さくなる。つまり、第一電極13付近または第二電極14付近に押圧外力Fを受けた場合の方が、第一電極13と第二電極14の中央付近に同一の押圧外力Fを受けた場合に比べて、第一電極13と第二電極14との間の第1抵抗の変化量ΔR1が大きくなる。従って、第一電極13と第二電極14との間の第1抵抗の変化量ΔR1に基づいて、押圧外力Fを受けた位置が、第一電極13または第二電極14からどの距離にあるかを判断することができる。
【0059】
さらに、変形センサ12は、第一電極13側から第二電極14側に向かって幅広の台形板状からなる。従って、第1抵抗R1は、模式的に示すと、図6に示すように、第一電極13側から第二電極14側に向かって並列接続される抵抗の数が増加するような関係となる。つまり、第1抵抗R1は、式(2)により表すことができる。
【0060】
【数2】
【0061】
ここで、無負荷状態においては、上記式(2)における各抵抗Ra1、Ra2、・・・、Rc5、Rc6が、同一のものとする。つまり、無負荷状態においては、各抵抗Ra1、Ra2、・・・、Rc5、Rc6をrとした場合には、式(2)は、式(3)のように表すことができる。
【0062】
【数3】
【0063】
そして、変形センサ12の何れの位置に押圧外力Fを受けたとしても、何れかの抵抗が増加するため、結果として第1抵抗R1は増加する。
【0064】
ここで、図6に示す「A」の範囲に押圧外力Fを受けた場合と、「B」の範囲に押圧外力Fを受けた場合とを比較する。「A」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Ra1、Ra2の抵抗値が増加する。また、「B」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Rc1〜Rc6の抵抗値が増加する。このとき、押圧外力Fを同一とし、それぞれの抵抗値の増加量が等しいとする。そして、「A」の範囲に押圧外力Fを受けた場合には、式(3)の第一項のrが増加することになり、「B」の範囲に押圧外力Fを受けた場合には、式(3)の第三項のrが増加することになる。つまり、「A」の範囲に押圧外力Fを受けた場合の方が、「B」の範囲に押圧外力Fを受けた場合に比べて、第1抵抗R1の増加量が大きくなる。
【0065】
また、図6に示す「C」の範囲に押圧外力Fを受けた場合と、「D」の範囲に押圧外力Fを受けた場合とを比較する。「C」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Ra1の抵抗値が増加する。また、「D」の範囲に押圧外力Fを受けた場合には、その範囲内に位置する抵抗Rc1の抵抗値が増加する。これらの場合において、それぞれの抵抗値の増加量が等しいとした場合には、式(2)より、「C」の範囲に押圧外力Fを受けた場合の方が、「D」の範囲に押圧外力Fを受けた場合に比べて、第1抵抗R1の増加量が大きくなる。
【0066】
このように、変形センサ12の面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1が異なる変化をする。従って、外力位置算出部22bは、抵抗変化量検出部22aにより検出された第1抵抗の変化量ΔR1に基づいて、第一電極13と第二電極とを結ぶ軸方向において、押圧外力Fを受ける位置を判別することができる。
【0067】
<その他の実施形態>
変形センサ12の変形態様について図7を参照して説明する。図7は、変形センサ12の変形態様を示す図である。図7(a)に示すように、第一電極13の幅を第二電極14の幅と同一ものを使用し、さらに、これらの電極13、14の幅は、面状部12aの対辺の他方(図7(a)の右端)の幅よりも大きくしている。変形センサ12は上記実施形態と同一形状からなる。従って、第一電極13と変形センサ12との接触長、および、第二電極14と変形センサ12の接触長は、上記実施形態と同一である。この場合、第一電極13と第二電極14との間の電気抵抗R1の変化量は、上記実施形態と同様となる。従って、上記実施形態と同様の作用効果を奏する。
【0068】
また、図7(b)に示すように、変形センサ12を、第一電極13側の部分を同一幅からなるようにし、第二電極14側の部分を台形状としている。この場合も、面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1の変化量ΔR1が異なる。従って、押圧外力Fの位置を算出できる。ただし、上記実施形態に比べて、同一幅からなる部分により、第1抵抗R1の変化への影響度が小さくなる。従って、検出精度は、上記実施形態の方がよい。
【0069】
また、図7(c)に示すように、変形センサ12を、第一電極13側の部分を同一幅とし、第二電極14側の部分を第一電極13側よりも大きな幅であって同一幅とする。そして、第一電極13側の小幅部分の長さLaと、第二電極14側の大幅部分の長さLaとは、同一としている。この場合も、面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1の変化量ΔR1が異なる。従って、押圧外力Fの位置を算出できる。ただし、検出精度は、上記実施形態の方がよい。さらには、検出精度は、同一幅の部分が存在しない図7(b)の場合の方がよい。
【0070】
また、図7(d)に示すように、変形センサ12の幅を、第一電極13から第二電極14に向かって全てに亘って同一幅とする。そして、この変形センサ12の幅は、第二電極14の幅と同一とする。この場合も、面状部12aのうち押圧外力Fを受ける位置に応じて、第一電極13と第二電極14との間の第1抵抗R1の変化量ΔR1が異なる。この理由は、変形センサ12のうち第一電極13付近において、第一電極13に接触していない部分は、ほとんど影響を及ぼさないためである。つまり、この場合の変形センサ12の抵抗分布としては、上記実施形態と近似した関係となるためである。ただし、この場合には、当該部分の影響を少なからず受けるため、当該影響を受けない上記実施形態の方が検出精度がよい。
【図面の簡単な説明】
【0071】
【図1】変形センサシステムの全体構成図である。
【図2】無負荷状態および負荷状態における図1のA−A断面図である。
【図3】無負荷状態および負荷状態における変形センサ12の断面模式図である。
【図4】変形センサ12が曲げ変形した状態を示す図である。
【図5】変形センサ12の曲率Cに対する電気抵抗の変化特性を示す図である。
【図6】制御部20の検出部22を構成する抵抗変化量検出部22aを説明する図を示す。
【図7】変形センサ12の変形態様を示す図である。
【符号の説明】
【0072】
10:センサ構造体、 20:制御部、 30:モニタ、
11:載置板、 12:変形センサ、 12a:面状部、 12b:エラストマー、
12c:導電性フィラー、
13:第一電極、 14:第二電極、 15:コネクタ、 16:配線、
17:電極、
21:電源回路、 22:検出部、 23:出力部、
22a:抵抗変化量検出部、 22b:外力位置算出部、
Ps:導電パス
【特許請求の範囲】
【請求項1】
外力を受け得る面状部を有し、前記面状部に前記外力を受けた場合に弾性変形し、その弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる変形センサと、
前記面状部の周縁部における所定の対辺のうち一方に接触して配置される第一電極と、
前記所定の対辺のうち他方に接触して配置され、前記第一電極が前記所定の対辺に接触する接触長よりも長い接触長を有する第二電極と、
前記第一電極と前記第二電極との間に電圧を印加した場合に、前記第一電極と前記第二電極との間における前記外力による前記変形センサの前記電気抵抗の変化に基づいて、前記面状部のうち前記外力を受けた位置を検出する検出部と、
を備えることを特徴とする変形センサシステム。
【請求項2】
前記所定の対辺が対向する方向に直交する方向の前記面状部の幅は、前記所定の対辺の前記一方端より前記所定の対辺の前記他方端の方が広く形成される請求項1に記載の変形センサシステム。
【請求項3】
前記所定の対辺が対向する方向に直交する方向の前記面状部の幅は、前記一方端から前記他方端までの間の少なくとも一部において、前記一方側から前記他方側に向かって次第に広く形成される請求項2に記載の変形センサシステム。
【請求項4】
前記所定の対辺が対向する方向に直交する方向の前記面状部の幅は、前記一方端から前記他方端に向かって全体に亘って次第に広く形成される請求項3に記載の変形センサシステム。
【請求項5】
前記第一電極の幅は、前記所定の対辺の前記一方端の幅以上である請求項2〜4の何れか一項に記載の変形センサシステム。
【請求項6】
前記第二電極の幅は、前記所定の対辺の前記他方端の幅以上である請求項2〜5の何れか一項に記載の変形センサシステム。
【請求項7】
前記弾性材は、所定のゴムからなるエラストマーと、前記エラストマー中に略単粒子状態で且つ高充填率で配合されている球状の導電性フィラーとを有する請求項1〜6の何れか一項に記載の変形センサシステム。
【請求項1】
外力を受け得る面状部を有し、前記面状部に前記外力を受けた場合に弾性変形し、その弾性変形量が増加するに従って電気抵抗が増加する弾性材からなる変形センサと、
前記面状部の周縁部における所定の対辺のうち一方に接触して配置される第一電極と、
前記所定の対辺のうち他方に接触して配置され、前記第一電極が前記所定の対辺に接触する接触長よりも長い接触長を有する第二電極と、
前記第一電極と前記第二電極との間に電圧を印加した場合に、前記第一電極と前記第二電極との間における前記外力による前記変形センサの前記電気抵抗の変化に基づいて、前記面状部のうち前記外力を受けた位置を検出する検出部と、
を備えることを特徴とする変形センサシステム。
【請求項2】
前記所定の対辺が対向する方向に直交する方向の前記面状部の幅は、前記所定の対辺の前記一方端より前記所定の対辺の前記他方端の方が広く形成される請求項1に記載の変形センサシステム。
【請求項3】
前記所定の対辺が対向する方向に直交する方向の前記面状部の幅は、前記一方端から前記他方端までの間の少なくとも一部において、前記一方側から前記他方側に向かって次第に広く形成される請求項2に記載の変形センサシステム。
【請求項4】
前記所定の対辺が対向する方向に直交する方向の前記面状部の幅は、前記一方端から前記他方端に向かって全体に亘って次第に広く形成される請求項3に記載の変形センサシステム。
【請求項5】
前記第一電極の幅は、前記所定の対辺の前記一方端の幅以上である請求項2〜4の何れか一項に記載の変形センサシステム。
【請求項6】
前記第二電極の幅は、前記所定の対辺の前記他方端の幅以上である請求項2〜5の何れか一項に記載の変形センサシステム。
【請求項7】
前記弾性材は、所定のゴムからなるエラストマーと、前記エラストマー中に略単粒子状態で且つ高充填率で配合されている球状の導電性フィラーとを有する請求項1〜6の何れか一項に記載の変形センサシステム。
【図1】

【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−241528(P2008−241528A)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願番号】特願2007−83978(P2007−83978)
【出願日】平成19年3月28日(2007.3.28)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願日】平成19年3月28日(2007.3.28)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
[ Back to top ]