
変形センサシステム

【課題】高速にスイッチ素子の切り替えを行ったとしても、センサを幅方向に区画した部分センサ領域の電気抵抗を高精度に計測することができる変形センサシステムを提供する。
【解決手段】制御回路60は、切り替え前における計測回路50による計測対象の部分センサ領域12aと切り替え後における計測回路50による計測対象の部分センサ領域12cとの間に、少なくとも一以上の他の部分センサ領域12bが介在するように、ハイサイドスイッチ素子30a〜30fおよびローサイドスイッチ素子40a〜40fを順次切り替える。
【解決手段】制御回路60は、切り替え前における計測回路50による計測対象の部分センサ領域12aと切り替え後における計測回路50による計測対象の部分センサ領域12cとの間に、少なくとも一以上の他の部分センサ領域12bが介在するように、ハイサイドスイッチ素子30a〜30fおよびローサイドスイッチ素子40a〜40fを順次切り替える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変形した場合にセンサの幅方向の電気抵抗が変化するときセンサを用いて、当該センサの幅方向の部分的な電気抵抗を計測する変形センサシステムに関するものである。
【背景技術】
【0002】
電気抵抗などの計測対象が複数ある場合であって、電源および計測回路などが1つの場合には、電気的な接続を切り替えるスイッチ素子を設ける(例えば、特許文献1〜2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5-227362号公報
【特許文献2】特許第4640131号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両の衝突試験などにおいて、ダミー人形の動きを計測することが行われている。この現象をより詳細に把握するために、衝突時のシートベルトによるダミー人形の形状変化を計測したいという要請がある。そこで、所定幅を有し、変形した場合に幅方向の電気抵抗が変化するセンサを用いて、当該センサの幅方向の部分領域の電気抵抗を計測して、当該センサの変形状態を把握することが考えられる。つまり、当該センサは、複数の電気抵抗が直列接続されている電気回路とみなすことができる。このとき、低コスト化の観点から電源および計測回路を1つとして、スイッチ素子の切り替えによって電気的な接続部位を順次切り替えて、センサの幅方向の部分領域の電気抵抗を計測する。
【0005】
しかし、衝突試験において計測したい荷重変化のサンプリング時間は非常に短いため、上記スイッチ素子の高速な切り替えが必要となる。高速にスイッチ素子を切り替える場合には、スイッチ素子により構成される電気回路がショート状態となるおそれがあり、その直後に計測される電気抵抗に悪影響を及ぼすおそれがある。つまり、計測される電気抵抗の精度が低下してしまう。
【0006】
さらに、切り替え前のスイッチ素子の遮断のタイミングと切り替え後のスイッチ素子の接続のタイミングとの間に時間を設けると、ショート状態になることを回避できるが、計測処理に時間を要することになり、高速処理の要請を満たすことができなくなる。さらには、切り替えの間を設けるということは、その間、電気回路がオープン状態となる。オープン状態となることによっても、その直後に計測される電気抵抗に悪影響を及ぼすおそれがある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、高速にスイッチ素子の切り替えを行ったとしても、幅方向の部分領域の電気抵抗を高精度に計測することができる変形センサシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の変形センサシステムは、所定幅を有する形状に形成され、変形した場合に幅方向の電気抵抗が変化するセンサと、前記センサを幅方向に少なくとも3以上の部分センサ領域に区画する4以上の電極と、電源と、一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の一方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のハイサイドスイッチ素子と、一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の他方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のローサイドスイッチ素子と、接続状態の前記ハイサイドスイッチ素子に接続されている前記電極と接続状態の前記ローサイドスイッチ素子に接続されている前記電極との間の前記部分センサ領域の電気抵抗を計測する計測回路と、接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替えて前記計測回路により計測される前記部分センサ領域を変更させる制御回路と、を備え、前記制御回路は、切り替え前における計測対象の前記部分センサ領域と切り替え後における計測対象の前記部分センサ領域との間に、少なくとも一以上の他の前記部分センサ領域が介在するように、前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替える。
【0009】
これにより、仮に、切り替え前の各スイッチ素子および切り替え後の各スイッチ素子を接続状態にしたとしても、電気回路がショート状態になることはない。従って、各スイッチ素子の遮断状態と接続状態との切り替えを高速に行ったとしても、ショート状態にならない。さらに、高速に各スイッチ素子を切り替えることにより、オープン状態になることを限りなく回避できる。従って、部分センサ領域の電気抵抗を高速にかつ高精度に計測することができる。
【0010】
また、前記制御回路は、現在接続状態の前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の遮断動作と、次に接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の接続動作とを同時に行うようにしてもよい。このようにすることで、高速な計測ができる。そして、同時に遮断動作と接続動作を行ったとしても、上述したようにショート状態となることはない。従って、部分センサ領域の電気抵抗を高速にかつ高精度に計測することができる。
【0011】
また、前記計測回路は、それぞれの前記部分センサ領域の電気抵抗を計測するようにしてもよい。つまり、ハイサイドスイッチ素子およびローサイドスイッチ素子を順次切り替えて、それぞれの部分センサ領域の両端が電源の両端のそれぞれに接続される状態とする。この場合、従来のような手法によれば、各スイッチ素子により構成される電気回路がショート状態となるおそれが高くなる。しかしながら、本発明を適用することにより、このような計測を行うとしても、ショート状態となることを確実に回避できる。
【0012】
また、前記変形センサシステムは、前記計測回路により計測されたそれぞれの前記部分センサ領域の電気抵抗に基づいて、前記センサの変形状態を算出する変形状態算出部を備えるようにしてもよい。これにより、高速にかつ高精度に、センサの変形状態を取得することができる。
【図面の簡単な説明】
【0013】
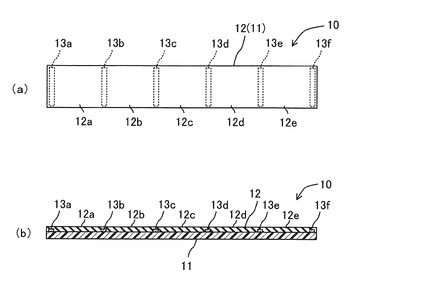
【図1】(a)センサユニット10の平面図を示す。(b)センサユニット10の断面図を示す。
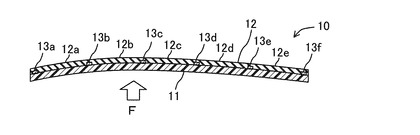
【図2】センサユニット10が外力Fを受けた場合のセンサユニット10の断面図を示す。
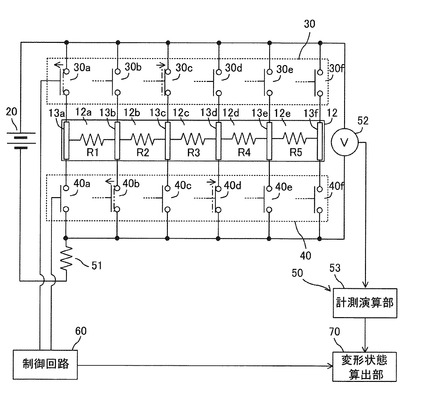
【図3】第一実施形態:変形センサシステムの回路構成図を示す。
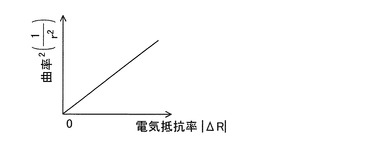
【図4】センサ12の部分センサ領域12a〜12eにおける電気抵抗率の絶対値|ΔR|と各部分センサ領域12a〜12eの曲率の2乗との関係を示す図である。
【図5】制御回路60によりハイサイドスイッチ素子30a〜30fおよびローサイドスイッチ素子40a〜40fの接続状態および遮断状態の切り替え順序を示す。
【図6】第二実施形態:変形センサシステムの回路構成図を示す。
【発明を実施するための形態】
【0014】
<第一実施形態>
第一実施形態の変形センサシステムについて説明する。変形センサシステムは、例えば、車両の衝突試験においてダミー人形が受ける瞬間的な荷重を、ダミー人形の各部位について計測する場合に適用される。そのため、非常に短いサンプリング時間で、複数の部位の荷重を計測することが求められる。
【0015】
このような変形センサシステムを構成するセンサユニット10について、図1(a)(b)および図2を参照して説明する。図1(a)(b)に示すように、センサユニット10は、所定幅(図1(a)(b)の左右方向幅)を有する面形状、例えば、長尺矩形形状に形成されている。そして、図2に示すように、センサユニット10に面法線方向(図2の上下方向)の外力Fが加えられた場合に、当該面法線方向に撓み変形可能に形成されている。
【0016】
このセンサユニット10についてさらに詳細に説明する。図1(a)(b)に示すように、センサユニット10は、基材11と、センサ12と、複数の電極13a〜13fとを備える。基材11は、絶縁性材料であって、例えば樹脂やエラストマーなどにより、センサユニット10全体と同じ面形状に形成されている。図2に示すように、この基材11自体が、面法線方向の外力Fを受けた場合に、面法線方向に撓み変形可能に形成されている。基材11は、例えば、可撓性を有する材料により形成したり、薄肉部を設けるなどして局所的に変形可能な形状に形成したりする。
【0017】
センサ12は、図1(a)(b)に示すように、導電性材料により基材11の一方面に薄膜状に形成されている。つまり、センサ12は、所定幅(図1(a)(b)の左右方向幅)を有する面形状に形成されている。図2に示すように、センサ12は、基材11が撓み変形することに伴って、伸張変形または圧縮変形などを生じる。センサ12の材料は、変形することにより電気抵抗が変化するような材料とする。ここで、センサ12は、変形した場合に、電気抵抗が増加する材料であってもよいし、電気抵抗が減少する材料であってもよい。また、センサ12は、塗料、導電性エラストマーなどが適用される。つまり、基材11が撓み変形することに伴って、センサ12が面法線方向に撓み変形することにより、センサ12の幅方向の電気抵抗が変化する。
【0018】
図1(a)(b)に示すように、複数(本実施形態においては6つ)の電極13a〜13fは、センサ12の幅方向を3以上(本実施形態においては、7つ)の部分センサ領域12a〜12eに区画するように設けられている。それぞれの電極13a〜13fは、センサ12の裏面側(基材11側)に配置されることにより、センサ12に電気的に接続される。電極13a〜13fは、例えば、銅箔パターンを基材11の一方面に形成することにより形成される。
【0019】
ここで、センサ12は導電性材料により形成されているため、隣り合う電極13a〜13fにより区画された部分センサ領域12a〜12eは、それぞれ電気抵抗R1〜R5(図3に示す)を有する。つまり、電気抵抗R1〜R5が直列接続された電気回路を構成する。さらに、センサ12の幅方向(図1,図3の左右方向)の電気抵抗は変形に応じて変化する。従って、部分センサ領域12a〜12eの幅方向の電気抵抗R1〜R5も、それぞれの変形に応じて変化する。
【0020】
次に、上述したセンサ12が変形した場合に部分センサ領域12a〜12eの電気抵抗を計測することにより、センサ12の変形状態を算出する変形センサシステム全体の構成について、図3を参照して説明する。
【0021】
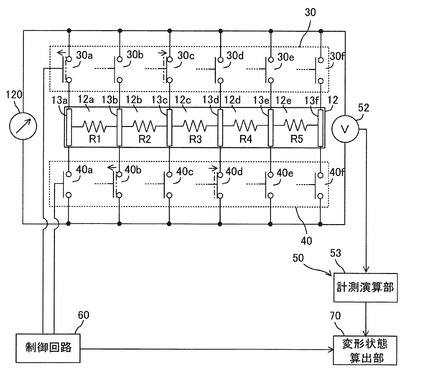
図3に示すように、変形センサシステムは、センサ12および電極13a〜13fの他に、直流電源20、ハイサイドスイッチユニット30、ローサイドスイッチユニット40、計測回路50、制御回路60、変形状態算出部70を備える。
【0022】
ハイサイドスイッチユニット30は、電極13a〜13fの数に対応した数のハイサイドスイッチ素子30a〜30fを備える。それぞれのハイサイドスイッチ素子30a〜30fは、例えば、FET(Field effect transistor)などが適用される。FETなどの素子は、高速に接続状態と遮断状態との切り替えが可能であるため、本システムに好適に採用される。そして、それぞれのハイサイドスイッチ素子30a〜30fの一端側は、それぞれの電極13a〜13fに電気的に接続され、他端側は、直流電源20の一方側(ここでは、正極側)に電気的に接続される。そして、それぞれのハイサイドスイッチ素子30a〜30fは、接続されている両端における電気的な遮断状態と接続状態とを切り替える。ここで、ハイサイドスイッチ素子30a〜30fは、選択された一つが接続状態となり、残りが遮断状態となるように構成されている。
【0023】
ローサイドスイッチユニット40は、電極13a〜13fの数に対応した数のローサイドスイッチ素子40a〜40fを備える。それぞれのローサイドスイッチ素子40a〜40fは、例えば、FET(Field effect transistor)などが適用される。そして、それぞれのローサイドスイッチ素子40a〜40fの一端側は、それぞれの電極13a〜13fに電気的に接続され、他端側は、直流電源20の他方側(ここでは、負極側)に電気的に接続される。そして、それぞれのローサイドスイッチ素子40a〜40fは、接続されている両端における電気的な遮断状態と接続状態とを切り替える。ここで、ローサイドスイッチ素子40a〜40fは、選択された一つが接続状態となり、残りが遮断状態となるように構成されている。
【0024】
計測回路50は、ハイサイドスイッチ素子30a〜30fのうち接続状態であるスイッチ素子に接続されている電極13a〜13fとローサイドスイッチ素子40a〜40fのうち接続状態であるスイッチ素子に接続されている電極13a〜13fとの間の部分センサ領域12a〜12eの電気抵抗R1〜R5を計測する。ここでは、計測回路50は、それぞれの部分センサ領域12a〜12eの電気抵抗R1〜R5を計測する。ただし、電気抵抗R1〜R5の計測順序は、後述するが、R1から隣り合う順序ではない。
【0025】
この計測回路50は、ローサイドスイッチ素子40a〜40fに直列接続されたシャント抵抗51、ハイサイドスイッチ素子30a〜30fの直流電源20側端子とローサイドスイッチ素子40a〜40fの直流電源20側端子との間の電圧を計測する電圧計52、電圧計52により計測された電圧に基づいて電気抵抗を演算する計測演算部53を備える。
【0026】
制御回路60は、接続状態とするハイサイドスイッチ素子30a〜30fおよびローサイドスイッチ素子40a〜40fを順次切り替えて、計測回路50により計測される部分センサ領域12a〜12eの電気抵抗R1〜R5を変更させる。制御回路60は、例えば、スイッチ素子30a,40bが図3において二点鎖線にて示すように接続状態であって、他のスイッチ素子30b〜30f,40a,40c〜40fが遮断状態において、スイッチ素子30a,40bの遮断動作と、スイッチ素子30c,40dの接続動作とを同時に行う。つまり、切り替え前には部分センサ領域12aが通電しており、切り替え後には部分センサ領域12cが通電している。つまり、切り替え前後に通電する部分センサ領域12a,12cの間には、部分センサ領域12bが介在している。なお、制御回路60によるスイッチ素子30a〜30f,40a〜40fの接続状態および遮断状態の切り替え順序については、後述する。
【0027】
変形状態算出部70は、計測回路50の計測演算部53により計測されたそれぞれの部分センサ領域12a〜12eの電気抵抗R1〜R5、および、制御回路60により接続状態としたスイッチ素子30a〜30f,40a〜40fに関する情報に基づいて、センサ12の変形状態を算出する。
【0028】
ここで、部分センサ領域12a〜12eにおける電気抵抗R1〜R5の変化率(電気抵抗率)ΔRの絶対値と、各部分センサ領域12a〜12eの曲率の2乗(曲率半径rの2乗の逆数)との関係を図4に示す。つまり、電気抵抗率の絶対値|ΔR|が大きくなるほど、曲率の2乗の値が大きくなる関係になる。従って、電気抵抗率の絶対値|ΔR|が大きくなるほど、対応する部分センサ領域12a〜12eの撓み変形量が大きくなる関係となる。このような関係から、変形状態算出部70は、部分センサ領域12a〜12eの電気抵抗率の絶対値|ΔR|に基づいて、当該部分センサ領域12a〜12eの変形状態を算出することができる。
【0029】
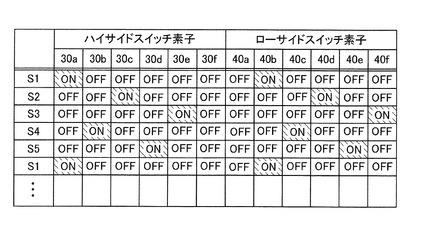
次に、制御回路60によるスイッチ素子30a〜30f,40a〜40fの接続状態および遮断状態の切り替え順序について、図5を参照して説明する。なお、図5に示す順序は、一例であり、この順序に限定されるものではない。目的は、切り替え前後に通電する部分センサ領域12a〜12eの間に、少なくとも1つの他の部分センサ領域12a〜12eが介在するようにすることである。
【0030】
図5において、S1→S2→S3→S4→S5→S1→・・・の順に繰り返す。図5のS1に示すように、ハイサイドスイッチ素子30aとローサイドスイッチ素子40bが接続状態となっており、残りは遮断状態となる。このとき、部分センサ領域12aが通電状態となるため、計測回路50は、電気抵抗R1を計測する。
【0031】
続いて、図5のS2に示すように、スイッチ素子30a,40bが遮断状態に切り替わると同時に、スイッチ素子30c,40dが接続状態に切り替わる。このとき、部分センサ領域12cが通電状態となるため、計測回路50は、電気抵抗R3を計測する。つまり、切り替え前後に通電する部分センサ領域12a,12cの間には、部分センサ領域12bが介在している。続いて、図5のS3に示すように、スイッチ素子30c,40dが遮断状態に切り替わると同時に、スイッチ素子30e,40fが接続状態に切り替わる。このとき、部分センサ領域12eが通電状態となるため、計測回路50は、電気抵抗R5を計測する。つまり、切り替え前後に通電する部分センサ領域12c,12eの間には、部分センサ領域12dが介在している。
【0032】
続いて、図5のS4に示すように、スイッチ素子30e,40fが遮断状態に切り替わると同時に、スイッチ素子30b,40cが接続状態に切り替わる。このとき、部分センサ領域12bが通電状態となるため、計測回路50は、電気抵抗R2を計測する。つまり、切り替え前後に通電する部分センサ領域12e,12bの間には、部分センサ領域12c,12dが介在している。続いて、図5のS5に示すように、スイッチ素子30b,40cが遮断状態に切り替わると同時に、スイッチ素子30d,40eが接続状態に切り替わる。このとき、部分センサ領域12dが通電状態となるため、計測回路50は、電気抵抗R4を計測する。つまり、切り替え前後に通電する部分センサ領域12b,12dの間には、部分センサ領域12cが介在している。
【0033】
上記のような順序で各スイッチ素子30a〜30f,40a〜40fを切り替えることにより、仮に、切り替え前の各スイッチ素子および切り替え後の各スイッチ素子を接続状態にしたとしても、電気回路がショート状態になることはない。従って、各スイッチ素子の遮断状態と接続状態との切り替えを高速に行ったとしても、ショート状態にならない。さらに、高速に各スイッチ素子30a〜30f,40a〜40fを切り替えることにより、オープン状態になることを限りなく回避できる。従って、部分センサ領域12a〜12eの電気抵抗R1〜R5を高速にかつ高精度に計測することができる。
【0034】
また、現在接続状態のスイッチ素子30a〜30f,40a〜40fの遮断動作と、次に接続状態とするスイッチ素子30a〜30f,40a〜40fの接続動作とを同時に行うようにしている。このようにすることで、高速な計測ができる。そして、同時に遮断動作と接続動作を行ったとしても、上述したようにショート状態となることはない。従って、部分センサ領域12a〜12eの電気抵抗を高速にかつ高精度に計測することができる。そして、変形状態算出部70により高速にかつ高精度に、センサ12の変形状態を取得することができる。
【0035】
<第二実施形態>
第二実施形態の変形センサシステムについて、図6を参照して説明する。図6に示すように、本実施形態の変形センサシステムは、第一実施形態のシステムに対して、直流電源20を定電流回路120(定電流素子を含む)に置き換え、シャント抵抗51を削除した。この場合も、上記同様に、各部分センサ領域12a〜12eの電気抵抗R1〜R5を高速にかつ高精度に計測することができ、さらにセンサ12の変形状態を高速にかつ高精度に取得することができる。
【符号の説明】
【0036】
10:センサユニット、 11:基材、 12:センサ
12a〜12e:部分センサ領域、 13a〜13f:電極、 20:直流電源
30a〜30f:ハイサイドスイッチ素子、 40a〜40f:ローサイドスイッチ素子
50:計測回路、 51:シャント抵抗、 52:電圧計、 53:計測演算部
60:制御回路、 70:変形状態算出部、 120:定電流回路
【技術分野】
【0001】
本発明は、変形した場合にセンサの幅方向の電気抵抗が変化するときセンサを用いて、当該センサの幅方向の部分的な電気抵抗を計測する変形センサシステムに関するものである。
【背景技術】
【0002】
電気抵抗などの計測対象が複数ある場合であって、電源および計測回路などが1つの場合には、電気的な接続を切り替えるスイッチ素子を設ける(例えば、特許文献1〜2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5-227362号公報
【特許文献2】特許第4640131号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両の衝突試験などにおいて、ダミー人形の動きを計測することが行われている。この現象をより詳細に把握するために、衝突時のシートベルトによるダミー人形の形状変化を計測したいという要請がある。そこで、所定幅を有し、変形した場合に幅方向の電気抵抗が変化するセンサを用いて、当該センサの幅方向の部分領域の電気抵抗を計測して、当該センサの変形状態を把握することが考えられる。つまり、当該センサは、複数の電気抵抗が直列接続されている電気回路とみなすことができる。このとき、低コスト化の観点から電源および計測回路を1つとして、スイッチ素子の切り替えによって電気的な接続部位を順次切り替えて、センサの幅方向の部分領域の電気抵抗を計測する。
【0005】
しかし、衝突試験において計測したい荷重変化のサンプリング時間は非常に短いため、上記スイッチ素子の高速な切り替えが必要となる。高速にスイッチ素子を切り替える場合には、スイッチ素子により構成される電気回路がショート状態となるおそれがあり、その直後に計測される電気抵抗に悪影響を及ぼすおそれがある。つまり、計測される電気抵抗の精度が低下してしまう。
【0006】
さらに、切り替え前のスイッチ素子の遮断のタイミングと切り替え後のスイッチ素子の接続のタイミングとの間に時間を設けると、ショート状態になることを回避できるが、計測処理に時間を要することになり、高速処理の要請を満たすことができなくなる。さらには、切り替えの間を設けるということは、その間、電気回路がオープン状態となる。オープン状態となることによっても、その直後に計測される電気抵抗に悪影響を及ぼすおそれがある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、高速にスイッチ素子の切り替えを行ったとしても、幅方向の部分領域の電気抵抗を高精度に計測することができる変形センサシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の変形センサシステムは、所定幅を有する形状に形成され、変形した場合に幅方向の電気抵抗が変化するセンサと、前記センサを幅方向に少なくとも3以上の部分センサ領域に区画する4以上の電極と、電源と、一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の一方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のハイサイドスイッチ素子と、一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の他方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のローサイドスイッチ素子と、接続状態の前記ハイサイドスイッチ素子に接続されている前記電極と接続状態の前記ローサイドスイッチ素子に接続されている前記電極との間の前記部分センサ領域の電気抵抗を計測する計測回路と、接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替えて前記計測回路により計測される前記部分センサ領域を変更させる制御回路と、を備え、前記制御回路は、切り替え前における計測対象の前記部分センサ領域と切り替え後における計測対象の前記部分センサ領域との間に、少なくとも一以上の他の前記部分センサ領域が介在するように、前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替える。
【0009】
これにより、仮に、切り替え前の各スイッチ素子および切り替え後の各スイッチ素子を接続状態にしたとしても、電気回路がショート状態になることはない。従って、各スイッチ素子の遮断状態と接続状態との切り替えを高速に行ったとしても、ショート状態にならない。さらに、高速に各スイッチ素子を切り替えることにより、オープン状態になることを限りなく回避できる。従って、部分センサ領域の電気抵抗を高速にかつ高精度に計測することができる。
【0010】
また、前記制御回路は、現在接続状態の前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の遮断動作と、次に接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の接続動作とを同時に行うようにしてもよい。このようにすることで、高速な計測ができる。そして、同時に遮断動作と接続動作を行ったとしても、上述したようにショート状態となることはない。従って、部分センサ領域の電気抵抗を高速にかつ高精度に計測することができる。
【0011】
また、前記計測回路は、それぞれの前記部分センサ領域の電気抵抗を計測するようにしてもよい。つまり、ハイサイドスイッチ素子およびローサイドスイッチ素子を順次切り替えて、それぞれの部分センサ領域の両端が電源の両端のそれぞれに接続される状態とする。この場合、従来のような手法によれば、各スイッチ素子により構成される電気回路がショート状態となるおそれが高くなる。しかしながら、本発明を適用することにより、このような計測を行うとしても、ショート状態となることを確実に回避できる。
【0012】
また、前記変形センサシステムは、前記計測回路により計測されたそれぞれの前記部分センサ領域の電気抵抗に基づいて、前記センサの変形状態を算出する変形状態算出部を備えるようにしてもよい。これにより、高速にかつ高精度に、センサの変形状態を取得することができる。
【図面の簡単な説明】
【0013】
【図1】(a)センサユニット10の平面図を示す。(b)センサユニット10の断面図を示す。
【図2】センサユニット10が外力Fを受けた場合のセンサユニット10の断面図を示す。
【図3】第一実施形態:変形センサシステムの回路構成図を示す。
【図4】センサ12の部分センサ領域12a〜12eにおける電気抵抗率の絶対値|ΔR|と各部分センサ領域12a〜12eの曲率の2乗との関係を示す図である。
【図5】制御回路60によりハイサイドスイッチ素子30a〜30fおよびローサイドスイッチ素子40a〜40fの接続状態および遮断状態の切り替え順序を示す。
【図6】第二実施形態:変形センサシステムの回路構成図を示す。
【発明を実施するための形態】
【0014】
<第一実施形態>
第一実施形態の変形センサシステムについて説明する。変形センサシステムは、例えば、車両の衝突試験においてダミー人形が受ける瞬間的な荷重を、ダミー人形の各部位について計測する場合に適用される。そのため、非常に短いサンプリング時間で、複数の部位の荷重を計測することが求められる。
【0015】
このような変形センサシステムを構成するセンサユニット10について、図1(a)(b)および図2を参照して説明する。図1(a)(b)に示すように、センサユニット10は、所定幅(図1(a)(b)の左右方向幅)を有する面形状、例えば、長尺矩形形状に形成されている。そして、図2に示すように、センサユニット10に面法線方向(図2の上下方向)の外力Fが加えられた場合に、当該面法線方向に撓み変形可能に形成されている。
【0016】
このセンサユニット10についてさらに詳細に説明する。図1(a)(b)に示すように、センサユニット10は、基材11と、センサ12と、複数の電極13a〜13fとを備える。基材11は、絶縁性材料であって、例えば樹脂やエラストマーなどにより、センサユニット10全体と同じ面形状に形成されている。図2に示すように、この基材11自体が、面法線方向の外力Fを受けた場合に、面法線方向に撓み変形可能に形成されている。基材11は、例えば、可撓性を有する材料により形成したり、薄肉部を設けるなどして局所的に変形可能な形状に形成したりする。
【0017】
センサ12は、図1(a)(b)に示すように、導電性材料により基材11の一方面に薄膜状に形成されている。つまり、センサ12は、所定幅(図1(a)(b)の左右方向幅)を有する面形状に形成されている。図2に示すように、センサ12は、基材11が撓み変形することに伴って、伸張変形または圧縮変形などを生じる。センサ12の材料は、変形することにより電気抵抗が変化するような材料とする。ここで、センサ12は、変形した場合に、電気抵抗が増加する材料であってもよいし、電気抵抗が減少する材料であってもよい。また、センサ12は、塗料、導電性エラストマーなどが適用される。つまり、基材11が撓み変形することに伴って、センサ12が面法線方向に撓み変形することにより、センサ12の幅方向の電気抵抗が変化する。
【0018】
図1(a)(b)に示すように、複数(本実施形態においては6つ)の電極13a〜13fは、センサ12の幅方向を3以上(本実施形態においては、7つ)の部分センサ領域12a〜12eに区画するように設けられている。それぞれの電極13a〜13fは、センサ12の裏面側(基材11側)に配置されることにより、センサ12に電気的に接続される。電極13a〜13fは、例えば、銅箔パターンを基材11の一方面に形成することにより形成される。
【0019】
ここで、センサ12は導電性材料により形成されているため、隣り合う電極13a〜13fにより区画された部分センサ領域12a〜12eは、それぞれ電気抵抗R1〜R5(図3に示す)を有する。つまり、電気抵抗R1〜R5が直列接続された電気回路を構成する。さらに、センサ12の幅方向(図1,図3の左右方向)の電気抵抗は変形に応じて変化する。従って、部分センサ領域12a〜12eの幅方向の電気抵抗R1〜R5も、それぞれの変形に応じて変化する。
【0020】
次に、上述したセンサ12が変形した場合に部分センサ領域12a〜12eの電気抵抗を計測することにより、センサ12の変形状態を算出する変形センサシステム全体の構成について、図3を参照して説明する。
【0021】
図3に示すように、変形センサシステムは、センサ12および電極13a〜13fの他に、直流電源20、ハイサイドスイッチユニット30、ローサイドスイッチユニット40、計測回路50、制御回路60、変形状態算出部70を備える。
【0022】
ハイサイドスイッチユニット30は、電極13a〜13fの数に対応した数のハイサイドスイッチ素子30a〜30fを備える。それぞれのハイサイドスイッチ素子30a〜30fは、例えば、FET(Field effect transistor)などが適用される。FETなどの素子は、高速に接続状態と遮断状態との切り替えが可能であるため、本システムに好適に採用される。そして、それぞれのハイサイドスイッチ素子30a〜30fの一端側は、それぞれの電極13a〜13fに電気的に接続され、他端側は、直流電源20の一方側(ここでは、正極側)に電気的に接続される。そして、それぞれのハイサイドスイッチ素子30a〜30fは、接続されている両端における電気的な遮断状態と接続状態とを切り替える。ここで、ハイサイドスイッチ素子30a〜30fは、選択された一つが接続状態となり、残りが遮断状態となるように構成されている。
【0023】
ローサイドスイッチユニット40は、電極13a〜13fの数に対応した数のローサイドスイッチ素子40a〜40fを備える。それぞれのローサイドスイッチ素子40a〜40fは、例えば、FET(Field effect transistor)などが適用される。そして、それぞれのローサイドスイッチ素子40a〜40fの一端側は、それぞれの電極13a〜13fに電気的に接続され、他端側は、直流電源20の他方側(ここでは、負極側)に電気的に接続される。そして、それぞれのローサイドスイッチ素子40a〜40fは、接続されている両端における電気的な遮断状態と接続状態とを切り替える。ここで、ローサイドスイッチ素子40a〜40fは、選択された一つが接続状態となり、残りが遮断状態となるように構成されている。
【0024】
計測回路50は、ハイサイドスイッチ素子30a〜30fのうち接続状態であるスイッチ素子に接続されている電極13a〜13fとローサイドスイッチ素子40a〜40fのうち接続状態であるスイッチ素子に接続されている電極13a〜13fとの間の部分センサ領域12a〜12eの電気抵抗R1〜R5を計測する。ここでは、計測回路50は、それぞれの部分センサ領域12a〜12eの電気抵抗R1〜R5を計測する。ただし、電気抵抗R1〜R5の計測順序は、後述するが、R1から隣り合う順序ではない。
【0025】
この計測回路50は、ローサイドスイッチ素子40a〜40fに直列接続されたシャント抵抗51、ハイサイドスイッチ素子30a〜30fの直流電源20側端子とローサイドスイッチ素子40a〜40fの直流電源20側端子との間の電圧を計測する電圧計52、電圧計52により計測された電圧に基づいて電気抵抗を演算する計測演算部53を備える。
【0026】
制御回路60は、接続状態とするハイサイドスイッチ素子30a〜30fおよびローサイドスイッチ素子40a〜40fを順次切り替えて、計測回路50により計測される部分センサ領域12a〜12eの電気抵抗R1〜R5を変更させる。制御回路60は、例えば、スイッチ素子30a,40bが図3において二点鎖線にて示すように接続状態であって、他のスイッチ素子30b〜30f,40a,40c〜40fが遮断状態において、スイッチ素子30a,40bの遮断動作と、スイッチ素子30c,40dの接続動作とを同時に行う。つまり、切り替え前には部分センサ領域12aが通電しており、切り替え後には部分センサ領域12cが通電している。つまり、切り替え前後に通電する部分センサ領域12a,12cの間には、部分センサ領域12bが介在している。なお、制御回路60によるスイッチ素子30a〜30f,40a〜40fの接続状態および遮断状態の切り替え順序については、後述する。
【0027】
変形状態算出部70は、計測回路50の計測演算部53により計測されたそれぞれの部分センサ領域12a〜12eの電気抵抗R1〜R5、および、制御回路60により接続状態としたスイッチ素子30a〜30f,40a〜40fに関する情報に基づいて、センサ12の変形状態を算出する。
【0028】
ここで、部分センサ領域12a〜12eにおける電気抵抗R1〜R5の変化率(電気抵抗率)ΔRの絶対値と、各部分センサ領域12a〜12eの曲率の2乗(曲率半径rの2乗の逆数)との関係を図4に示す。つまり、電気抵抗率の絶対値|ΔR|が大きくなるほど、曲率の2乗の値が大きくなる関係になる。従って、電気抵抗率の絶対値|ΔR|が大きくなるほど、対応する部分センサ領域12a〜12eの撓み変形量が大きくなる関係となる。このような関係から、変形状態算出部70は、部分センサ領域12a〜12eの電気抵抗率の絶対値|ΔR|に基づいて、当該部分センサ領域12a〜12eの変形状態を算出することができる。
【0029】
次に、制御回路60によるスイッチ素子30a〜30f,40a〜40fの接続状態および遮断状態の切り替え順序について、図5を参照して説明する。なお、図5に示す順序は、一例であり、この順序に限定されるものではない。目的は、切り替え前後に通電する部分センサ領域12a〜12eの間に、少なくとも1つの他の部分センサ領域12a〜12eが介在するようにすることである。
【0030】
図5において、S1→S2→S3→S4→S5→S1→・・・の順に繰り返す。図5のS1に示すように、ハイサイドスイッチ素子30aとローサイドスイッチ素子40bが接続状態となっており、残りは遮断状態となる。このとき、部分センサ領域12aが通電状態となるため、計測回路50は、電気抵抗R1を計測する。
【0031】
続いて、図5のS2に示すように、スイッチ素子30a,40bが遮断状態に切り替わると同時に、スイッチ素子30c,40dが接続状態に切り替わる。このとき、部分センサ領域12cが通電状態となるため、計測回路50は、電気抵抗R3を計測する。つまり、切り替え前後に通電する部分センサ領域12a,12cの間には、部分センサ領域12bが介在している。続いて、図5のS3に示すように、スイッチ素子30c,40dが遮断状態に切り替わると同時に、スイッチ素子30e,40fが接続状態に切り替わる。このとき、部分センサ領域12eが通電状態となるため、計測回路50は、電気抵抗R5を計測する。つまり、切り替え前後に通電する部分センサ領域12c,12eの間には、部分センサ領域12dが介在している。
【0032】
続いて、図5のS4に示すように、スイッチ素子30e,40fが遮断状態に切り替わると同時に、スイッチ素子30b,40cが接続状態に切り替わる。このとき、部分センサ領域12bが通電状態となるため、計測回路50は、電気抵抗R2を計測する。つまり、切り替え前後に通電する部分センサ領域12e,12bの間には、部分センサ領域12c,12dが介在している。続いて、図5のS5に示すように、スイッチ素子30b,40cが遮断状態に切り替わると同時に、スイッチ素子30d,40eが接続状態に切り替わる。このとき、部分センサ領域12dが通電状態となるため、計測回路50は、電気抵抗R4を計測する。つまり、切り替え前後に通電する部分センサ領域12b,12dの間には、部分センサ領域12cが介在している。
【0033】
上記のような順序で各スイッチ素子30a〜30f,40a〜40fを切り替えることにより、仮に、切り替え前の各スイッチ素子および切り替え後の各スイッチ素子を接続状態にしたとしても、電気回路がショート状態になることはない。従って、各スイッチ素子の遮断状態と接続状態との切り替えを高速に行ったとしても、ショート状態にならない。さらに、高速に各スイッチ素子30a〜30f,40a〜40fを切り替えることにより、オープン状態になることを限りなく回避できる。従って、部分センサ領域12a〜12eの電気抵抗R1〜R5を高速にかつ高精度に計測することができる。
【0034】
また、現在接続状態のスイッチ素子30a〜30f,40a〜40fの遮断動作と、次に接続状態とするスイッチ素子30a〜30f,40a〜40fの接続動作とを同時に行うようにしている。このようにすることで、高速な計測ができる。そして、同時に遮断動作と接続動作を行ったとしても、上述したようにショート状態となることはない。従って、部分センサ領域12a〜12eの電気抵抗を高速にかつ高精度に計測することができる。そして、変形状態算出部70により高速にかつ高精度に、センサ12の変形状態を取得することができる。
【0035】
<第二実施形態>
第二実施形態の変形センサシステムについて、図6を参照して説明する。図6に示すように、本実施形態の変形センサシステムは、第一実施形態のシステムに対して、直流電源20を定電流回路120(定電流素子を含む)に置き換え、シャント抵抗51を削除した。この場合も、上記同様に、各部分センサ領域12a〜12eの電気抵抗R1〜R5を高速にかつ高精度に計測することができ、さらにセンサ12の変形状態を高速にかつ高精度に取得することができる。
【符号の説明】
【0036】
10:センサユニット、 11:基材、 12:センサ
12a〜12e:部分センサ領域、 13a〜13f:電極、 20:直流電源
30a〜30f:ハイサイドスイッチ素子、 40a〜40f:ローサイドスイッチ素子
50:計測回路、 51:シャント抵抗、 52:電圧計、 53:計測演算部
60:制御回路、 70:変形状態算出部、 120:定電流回路
【特許請求の範囲】
【請求項1】
所定幅を有する形状に形成され、変形した場合に幅方向の電気抵抗が変化するセンサと、
前記センサを幅方向に少なくとも3以上の部分センサ領域に区画する4以上の電極と、
電源と、
一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の一方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のハイサイドスイッチ素子と、
一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の他方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のローサイドスイッチ素子と、
接続状態の前記ハイサイドスイッチ素子に接続されている前記電極と接続状態の前記ローサイドスイッチ素子に接続されている前記電極との間の前記部分センサ領域の電気抵抗を計測する計測回路と、
接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替えて前記計測回路により計測される前記部分センサ領域を変更させる制御回路と、
を備え、
前記制御回路は、切り替え前における計測対象の前記部分センサ領域と切り替え後における計測対象の前記部分センサ領域との間に、少なくとも一以上の他の前記部分センサ領域が介在するように、前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替える変形センサシステム。
【請求項2】
請求項1において、
前記制御回路は、現在接続状態の前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の遮断動作と、次に接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の接続動作とを同時に行う変形センサシステム。
【請求項3】
請求項1または2において、
前記計測回路は、それぞれの前記部分センサ領域の電気抵抗を計測する変形センサシステム。
【請求項4】
請求項1〜3の何れか一項において、
前記変形センサシステムは、前記計測回路により計測されたそれぞれの前記部分センサ領域の電気抵抗に基づいて、前記センサの変形状態を算出する変形状態算出部を備える変形センサシステム。
【請求項1】
所定幅を有する形状に形成され、変形した場合に幅方向の電気抵抗が変化するセンサと、
前記センサを幅方向に少なくとも3以上の部分センサ領域に区画する4以上の電極と、
電源と、
一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の一方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のハイサイドスイッチ素子と、
一端側をそれぞれの前記電極に電気的に接続し、他端側を前記電源の他方側に電気的に接続し、両端における電気的な遮断状態と接続状態とを切り替える複数のローサイドスイッチ素子と、
接続状態の前記ハイサイドスイッチ素子に接続されている前記電極と接続状態の前記ローサイドスイッチ素子に接続されている前記電極との間の前記部分センサ領域の電気抵抗を計測する計測回路と、
接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替えて前記計測回路により計測される前記部分センサ領域を変更させる制御回路と、
を備え、
前記制御回路は、切り替え前における計測対象の前記部分センサ領域と切り替え後における計測対象の前記部分センサ領域との間に、少なくとも一以上の他の前記部分センサ領域が介在するように、前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子を順次切り替える変形センサシステム。
【請求項2】
請求項1において、
前記制御回路は、現在接続状態の前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の遮断動作と、次に接続状態とする前記ハイサイドスイッチ素子および前記ローサイドスイッチ素子の接続動作とを同時に行う変形センサシステム。
【請求項3】
請求項1または2において、
前記計測回路は、それぞれの前記部分センサ領域の電気抵抗を計測する変形センサシステム。
【請求項4】
請求項1〜3の何れか一項において、
前記変形センサシステムは、前記計測回路により計測されたそれぞれの前記部分センサ領域の電気抵抗に基づいて、前記センサの変形状態を算出する変形状態算出部を備える変形センサシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−3077(P2013−3077A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−137097(P2011−137097)
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【Fターム(参考)】
[ Back to top ]