
変形ロボット玩具
【課題】変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることのできる変形ロボット玩具。
【解決手段】ロボットを戦闘機の形態に変化できる変形ロボット玩具である。
胴体部の胸部に放射状に配置され複数の舌片部が、中心側に指向する先端を前記中心側と反対側に指向できるように胴体部に対して回動可能に配置できる。
戦闘機への変形操作は以下の通りである。頭部を胴体部に対して回動させることによって胴体部の背面側に移動し、左右腕部をそれぞれ先端が前記胴体部の上方で近接して位置づけられるように回動する。左右脚部をそれぞれ大腿部と下腿部との間の関節部で回動させることにより、先端が前記胴体部の腰部の両脇に位置づけさせる。複数の舌片部を回動させ、これら舌片部によって胴体部と左右腕部、左右腕部と左右脚部、胴体部と大腿部と下腿部との間の空隙部を閉塞する。
【解決手段】ロボットを戦闘機の形態に変化できる変形ロボット玩具である。
胴体部の胸部に放射状に配置され複数の舌片部が、中心側に指向する先端を前記中心側と反対側に指向できるように胴体部に対して回動可能に配置できる。
戦闘機への変形操作は以下の通りである。頭部を胴体部に対して回動させることによって胴体部の背面側に移動し、左右腕部をそれぞれ先端が前記胴体部の上方で近接して位置づけられるように回動する。左右脚部をそれぞれ大腿部と下腿部との間の関節部で回動させることにより、先端が前記胴体部の腰部の両脇に位置づけさせる。複数の舌片部を回動させ、これら舌片部によって胴体部と左右腕部、左右腕部と左右脚部、胴体部と大腿部と下腿部との間の空隙部を閉塞する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は変形ロボット玩具に関する。
【背景技術】
【0002】
形態が変化する種々の変形ロボット玩具が知られている。たとえば、人体の形態をなすロボットを戦闘機の形態に変化させるものもその1つとなっている。
【0003】
人体の形態をなすロボットは、他のロボットと戦闘させることによって遊技上の興味をそそらせることができ、さらに、地上での戦闘から空中戦に変化させることによって、より一層、遊技上の興味を向上させることができるからである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−070659
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、このような変形ロボット玩具を戦闘機の形態に変化させた場合、目視される戦闘機の形態において、変形前のロボットを予想させる痕跡が多く残っていたことが否めなかった。
【0006】
それ故、変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることが望まれる。
【0007】
本発明は、変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることができる変形ロボット玩具を提供することにある。
【課題を解決するための手段】
【0008】
本発明の変形ロボット玩具は、本発明の変形ロボット玩具は、胴体部、頭部、関節部を有する左右腕部、関節部を有する左右脚部を備えたロボットを戦闘機の形態に変化できる変形ロボット玩具であって、胴体部の胸部に放射状に配置され、中心側に指向する先端を前記中心側と反対側に指向できるように胴体部に対して回動可能に配置される複数の舌片部が備えられ、戦闘機は、頭部を、胴体部に対して回動させることによって胴体部の背面側に移動させ、左右腕部を、それぞれ、先端が前記胴体部の上方で近接して位置づけられるように回動させ、左右脚部を、それぞれ、大腿部と下腿部との間の関節部で回動させることにより、先端が胴体部の腰部の両脇に位置づけさせ、複数の舌片部を回動させ、これら舌片部によって、胴体部と左右腕部の間の空隙部、左右腕部と左右脚部との間の空隙部、胴体部と大腿部と下腿部との間の空隙部を閉塞することによって変形させる。
【0009】
また、本発明の変形ロボット玩具において、胴体部の背面側に凹部が形成され、頭部は凹部に収納されることが好ましい。また、本発明の変形ロボット玩具において、胴体部の背面側には、凹部を閉塞する蓋部が設けられていることが好ましい。また、本発明の変形ロボット玩具において、下腿部は大腿部に対して脚部の長手方向の周りに回動でき、下腿部の側面に備えられる噴射装置が前後方向の少なくとも一方側に位置づけられることを特徴とする。
【発明の効果】
【0010】
本発明の変形ロボット玩具によれば、変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることができるようになる。
【図面の簡単な説明】
【0011】
【図1】本発明の変形ロボット玩具の実施態様を示し、第1の形態(ロボット)をとるロボットの正面図である。
【図2】本発明の変形ロボット玩具の実施態様を示し、第1の形態をとるロボットの背面図である。
【図3】本発明の変形ロボット玩具の実施態様を示し、第2の形態(戦闘機)をとるロボットの下面図である。
【図4】本発明の変形ロボット玩具の実施態様を示し、第2の形態をとるロボットの上面図である。
【図5】本発明の変形ロボット玩具の第1の形態において、頭部を背中に形成された凹部に頭部を収納する様子を示した斜視図である。
【図6】本発明の変形ロボット玩具が第1の形態から第2の形態に変化する第1過程を示した説明図である。
【図7】本発明の変形ロボット玩具が第1の形態から第2の形態に変化する第2過程を示した説明図である。
【図8】本発明の変形ロボット玩具が第1の形態から第2の形態に変化する第3過程を示した説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態について、図面を参照しながら詳細に説明する。各図において同一の符号を付した部分は同一の部材を示している。
【0013】
(実施形態1)
図1、図2は、それぞれ、本発明の変形ロボット玩具の実施形態1を示す正面図、背面図である。図1、図2において、変形ロボット玩具100は、人体を模したロボット(以下、単にロボット100Aという)の形態として示されている。該ロボット100Aはたとえば成型樹脂材によって構成されている。
【0014】
ロボット100Aは、胴体部10を有し、この胴体部10の上部の肩部11R、11Lの間には頭部20が取り付けられている。胴体部10の右側の肩部11Rには右腕部30Rが取り付けられ、胴体部10の左側の肩部11Lには左腕部30Lが取り付けられている。また、胴体部10の下部に相当する腰部40には右脚部50Rおよび左脚部50Lが取り付けられている。
【0015】
右腕部30R、左腕部30Lは、それぞれ、左右対称の形状および機構で形成されている。このため、たとえば右腕部30Rについて説明すると、該右腕部30Rは、肩部11Rと図示しない支軸によって軸支され、この支軸を中心にして前後方向に揺動(回動)できるようになっている。また、右腕部30Rは、肩部11R側から先端にかけて、上腕部32R、前腕部33Rから構成され、前腕部33Rは上腕部32Rと支軸34Rによって軸支されている。支軸34Rはロボット100Aの前後方向へ中心軸を有し、これにより、前腕部33Rは支軸34Rを中心にして図中B方向へ回動できるようになっている。なお、図1中、左腕部30Lを構成する各部材には、右腕部30Rの対応する部材と同数字に添字Lからなる符号(たとえば、右腕部30Rの上腕部が32Rであるのに対し、右腕部30Lの上腕部は32L)を付して示している。上述したように、左腕部30Lは右腕部30Rと同様の構成となっている。
【0016】
右脚部50R、左脚部50Lは、それぞれ、左右対称の形状および機構で形成されている。このため、右脚部50Rについて説明すると、該右脚部50Rは、腰部40と図示しない支軸によって軸支され、この支軸を中心にして前後方向に回動できるようになっている。右脚部50Rのこのような動きは、左脚部50Lの同様の動きとともに、ロボット100Aを人体と同様に前進および後退させるようにするためである。また、右脚部50Rは、腰部40側から先端にかけて、大腿部51R、下腿部52R、足部53Rから構成され、下腿部52Rは大腿部51Rと図示しない支軸によって軸支され、人体と同様、この支軸を中心にして前後方向に回動できるようになっている。また、足部53Rは、下腿部52Rと図示しない支軸によって軸支され、人体と同様、この支軸を中心にして上下方向に回動できるようになっている。なお、図1中、左脚部50Lを構成する各部材には、右脚部50Rの対応する部材と同数字に添字Lからなる符号を付して示している。上述したように、左脚部50Lは右脚部50Rと同様の構成となっている。
【0017】
なお、図1に示すように、胴体部10の胸部には、その大部分の領域において、たとえば5個の舌片部60a、60b、60c、60d、60eが放射状に配置されて構成されている。これら各舌片部60a、60b、60c、60d、60eは、中心側に指向する先端とは反対側の端部(基部)において、それぞれ支軸61a、61b、61c、61d、61eによって胴体部10に取り付けられている。これら各支軸61a、61b、61c、61d、61eは、それぞれ、各舌片部60a、60b、60c、60d、60eの端部の辺に沿って中心軸を有するように配置されている。これにより、各舌片部60a、60b、60c、60d、60eは、それぞれ、支軸61a、61b、61c、61d、61eを中心として回動でき、先端を前記中心側と反対側の方向に指向できるように配置させることができるようになっている。これら舌片部60a、60b、60c、60d、60eの動作については後述する。
【0018】
また、図2に示すように、胴体部10の背面側は、腰部40に近接する個所において支軸70によって胴体部10に軸支された蓋部70を備えている。この蓋部70は、頭部20側に延在する矩形状をなして構成されている。図2では明らかでないが、蓋部70は前記支軸71を中心に回動でき、これにより、蓋部70によって被われていた胴体部10の裏面を露出させることができるようになっている。胴体部10の蓋部70によって被われている面には、凹部(図5において符号72で示す)が形成され、後述するように、この凹部内に頭部20を収納できるようになっている。
【0019】
このように構成された形態のロボット100Aは、人体の動きとほぼ同様な動きができ、緩慢あるいは急激な走行をさせたり、あるいは、他の図示しないロボット等と戦闘させたりして、遊技上の興味をそそることができるようになっている。また、このようなロボット100Aは、机の上に載置して飾ったりすることもできることはいうまでもない。ロボット100Aの下腿部52R、52Lは、大腿部51R、51Lと比較して大きく形成され、これにより、ロボット100Aの重心が載置面に近くなり、重心の安定化が図れるようになっている。また、足部53R、53Lの形成によって載置面との当接面を大きくでき、ロボット100Aが倒れ難い構成となっている。
【0020】
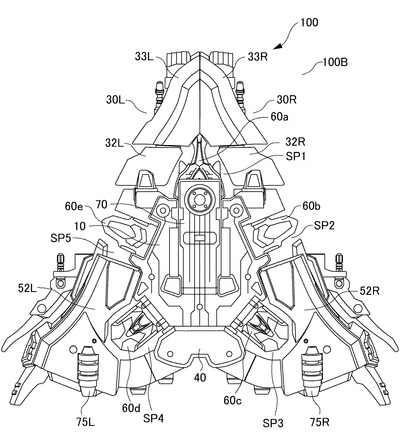
図3、図4は、図1、図2に示したロボット100Aの各構成部材を回動させることによって該ロボット100Aを変形させて得られる戦闘機100Bの形態を示した図である。図3は、戦闘機100Bの下面図で、ロボット100Aの形態の際の正面図に対応している。図4は、戦闘機100Bの上面図で、ロボット100Aの形態の際の背面図に対応している。図3、図4に示す戦闘機100Bは、飛行方向(図中上方向)に先鋭部を有するほぼ三角形状の船体からなるとともに、目視される形態からは図1、図2に示したロボット100Aを予想させる痕跡が隠されてしまっている形態となっている。すなわち、図3、図4に示す戦闘機100Bは、ロボット100Aの変形として予測させることが困難で、ロボット100Aとは別個の独自の戦闘機100Bとして構成したものと思わせる形態となっている。
【0021】
次に、本発明の変形ロボット玩具100のさらなる詳細な構成とともに、戦闘機100Bへの変形の過程を説明する。
【0022】
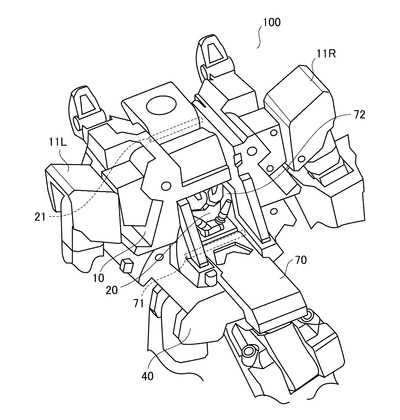
まず、ロボット100Aの頭部20について説明する。図5は、ロボット100Aを背面上方側から観た斜視図である。蓋部70が支軸71を中心に回動されることによって開いた状態となっており、これにより露出された凹部72に頭部20が収納されている状態を示している。
【0023】
図5に示すように、ロボット100Aの背中部の頭部20に近接する個所には凹部72が設けられている。頭部20は胴体部10との取り付け部において背中部側に配置される支軸21によって軸支されている。頭部20は前記支軸21を中心に後方へ回動でき、この回動を続けることによって頭部20は前記凹部72内に収納させることができるようになっている。図1には、同図に示す状態の頭部を矢印A方向に回動によって胴体部10の背面側へ傾倒できることを示している。前記凹部72内では頭部20は上下逆の状態で顔が後方向きに指向されて収納されることになる。そして、頭部20が収納された凹部72はロボット100Aの背中部に支軸71を中心として回動自在に設けた蓋部70によって閉塞されるようになっている(図2参照)。これにより、ロボット100Aの特徴部となる頭部20を変形ロボット玩具100の外観によって目視することができなくなる。
【0024】
次に、ロボット100Aの左右腕部(右腕部30R、左腕部30L)について説明する。右腕部30R、左腕部30Lは、それぞれ、左右対称の形状および機構で形成されている。このため、右腕部30Rについて説明すると、図1に示したように、前腕部33Rは上腕部32Rと支軸34Rによって軸支され、この支軸34Rを中心にして揺動できるようになっている。前記支軸34Rはロボット100Aの前後方向に中心軸を有し、前腕部33Rは、いわゆる手がほぼ水平となる方向(図中矢印B方向)に回動できるようになっている。この場合、前腕部33Aは、比較的細くかつ薄く形成された連結部35Rを介在させて上腕部32Rに連結(前記支軸34R等によって)され、前腕部33Rが上腕部32Rの周りに回動する過程において、該上腕部32Rとの干渉を回避させるようになっている。
【0025】
前腕部33Rの上腕部32Rに対する回動によって、前腕部33Rと上腕部32Rがいわゆる手がほぼ水平となる形態となった(図6参照)後に、さらに前腕部33Aをそのまま回動方向に移動させていく(図6中、矢印B’で示す)と、今度は、前腕部33Rおよび上腕部32Rが、直線状となったまま、肩部11Rに対して回動するようになっている。ここで、前記肩部11Rには、図6、図7に示すように、ロボット100Aの前後方向に中心軸を有する支軸12Rが取り付けられ、前腕部33Rおよび上腕部32Rは支軸12Rを中心として回動できるようになっている。
【0026】
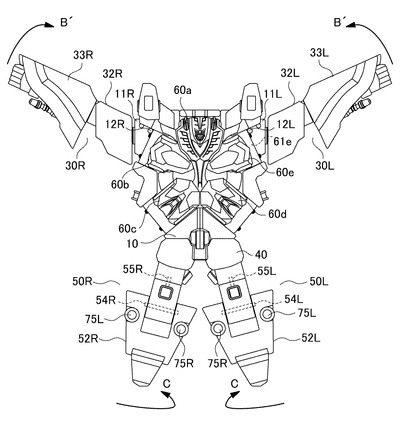
前腕部33R、上腕部32Rの直線状の形態をとる回動は、前腕部33Rの先端(いわゆる手の部分)がロボット100Aの肩部11R、11Lの間の上方の位置(いままで頭部20があった位置)に来るまでなされるようになっている(図7参照)。左腕部30Lにおいても、上述した同様の動作を行わせることができる。これにより、図7に示すように、胴体部10の上方において、右腕部30Rの先端と左腕部30Lの先端とが当接され、戦闘機100Bの前方における先鋭部の形態をとるようになる。なお、図6、図7中、左腕部30Lを構成する上述の各部材には、右脚部30Rの対応する部材と同数字で添字Rに替えて添字Lからなる符号を付して示している。
【0027】
ここで、図7に示すように、胴体部10と右腕部30Rと左腕部30Lは、それらの間にほぼ三角形状の孔からなる空隙部SP1を形成するようになる。すなわち、胴体部10のうち肩部11R、11L側の外側面、右腕部30Rの上腕部32Rおよび前腕部33Rの上方側面(ロボット100Aの形態の際の上方側面)、左腕部30Lの上腕部32Lおよび前腕部33Lの上方側面(ロボットの形態の際の上方側面)を各辺とする空隙部SP1ができるようになる。この空隙部SP1は、胴体部10上に載置される頭部20があった部分であるが、上述したように該頭部20は背中部に形成された凹部72内に収納されていることから前記空隙部SP1は比較的大きな面積で形成されるようになっている。この空隙部SP1は、後の説明で明らかとなるように、ロボット100Aの胴体部10の胸部に形成された複数の舌片部(60a、60b、60c、60d、60e)のうちの1つの舌片部60aによって閉塞されるようになっている。
【0028】
次に、左右脚部(右脚部50R、左脚部50L)について説明をする。右脚部50R、左脚部50Lは、それぞれ、左右対称の形状および機構で形成されている。このため、右脚部50Rについて説明すると、まず、図1に示すように、下腿部52Rは、大腿部51Aに対して支軸54Rを中心として図中矢印C方向に回動でき、先端の足部53Rをロボット100Aの後方へ移動できるようになっている。下腿部52Rがこのような回動をすることによって、該下腿部52Rは、図6に示すような形態をとるようになる。図6において、下腿部52Rの両側面(ロボット100Aの形態をとっている状態で)にはそれぞれガス噴射装置75Rが取り付けられており、これらガス噴射装置75Rの噴射口が目視されるようになる。なお、ガス噴射装置75Rは、下腿部52Rの両側面に取り付けられている必要はなく、そのうちの一方の側面のみに取り付けられていてもよい。ガス噴射装置75Rは、たとえば、ロボット100Aが戦闘機100Bの形態に変化した際に該戦闘機100Bの推進のための装置となるものである。
【0029】
また、図6に示す下腿部52Rは、大腿部51Aに対して支軸55Rを中心に回動できるようになっている。前記支軸55Rは右脚部50Rの長手方向に沿った中心軸を有し、下腿部52Rは図6の矢印C方向に回動できるようになっている。これにより、図7に示すように、下腿部52Rの内側面(ロボット100Aの形態をとっている場合の内側面)に取り付けられたガス噴射装置75Rの全体像を前方から目視できるようになる。
【0030】
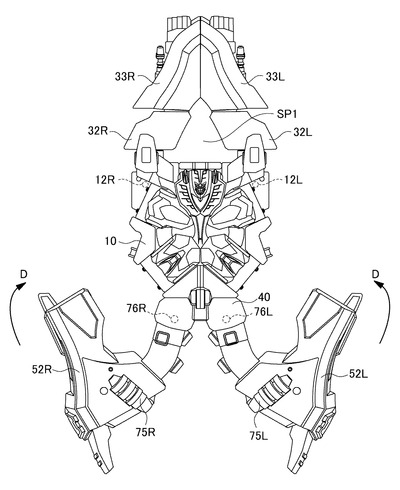
その後、図7に示すように、下腿部52Rは大腿部51Rに対して支軸76Rを中心に回動できるようになっている。前記支軸76Rはロボット100Aの前後方向に沿って中心軸を有し、下腿部52Rは、支軸76を中心として矢印D方向に回動でき、その先端(足部)がロボット100Aの右側腰部に近接できるように配置されるようになっている。これにより、右脚部50Rは、ロボット100Aの形態をとっている場合の前方面を外方へ指向させ、大腿部51Rと下腿部52Rとの関節を屈曲させた状態になる(図8参照)。
【0031】
左脚部50Lにおいても、右脚部50Rと同様の操作がなされ、ロボット100Aは、図8に示すような形態に変化する。なお、図中、左脚部50Lを構成する上述の各部材等には、右脚部50Rの対応する部材と同数字で添字Rに替えて添字Lからなる符号を付して示している。
【0032】
ここで、図8に示すように、胴体部10と右脚部50Rの間、胴体部10と左脚部50Lの間には、それぞれ、ほぼ矩形状の孔からなる空隙部SP3、SP4ができるようになる。すなわち、たとえば胴体部10と右脚部50Rの間の空隙部SP3について説明すれば、大腿部51Rの外側面、下腿部53Rの後側面(ロボットの形態の際の後側面)、胴体部10の外側面、腰部40の外側面を各辺とする空隙部SP3が形成されるようになる。この空隙部SP3は、戦闘機100Bの形態を平面的に観て三角形に近い状態に構成する場合、比較的大きな面積を有するようになることが免れなくなる。この空隙部SP3は、後の説明で明らかとなるように、ロボット100Aの胴体部10の胸部に形成された複数の舌片部(60a、60b、60c、60d、60e)のうちの1つの舌片部60cによって閉塞されるようになっている。
【0033】
また、図3に示すように、胴体部10の周辺であって、肩部11Rと腰部に近接して配置される下腿部52の間に、切り欠き状の空隙部SP2が形成されてしまうことが免れないものとなる。すなわち、この空隙部SP2は、肩部11R、胴体部10、下腿部52の先端を各辺として形成されるようになる。この空隙部SP2は、後の説明で明らかとなるように、ロボット100Aの胴体部10の胸部に形成された複数の舌片部(60a、60b、60c、60d、60e)のうちの1つの舌片部60bによって閉塞されるようになっている。
【0034】
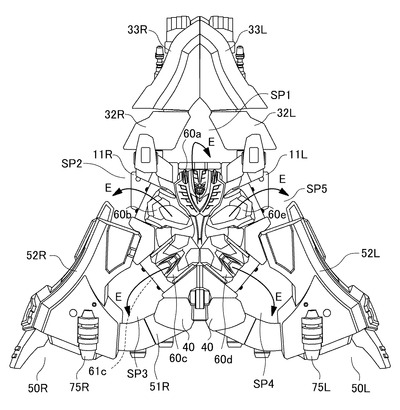
なお、上述のような空隙部は、図8に示すように、上述した空隙部SP2、SP3の他に、胴体部10と左脚部52Lとの間に空隙部SP4が形成され、また、胴体部10と肩部11Lと下腿部52Lとの間に空隙部SP5が形成されるようになっている。
【0035】
次に、胴体部10について説明をする。胴体部10は、その前方面(ロボットの形態の際の前方部)の大部分の領域を被うようにして、たとえば5個の舌片部60a、60b、60c、60d、60eが配置されていることは上述した通りである。これら舌片部60a、60b、60c、60d、60eは、ロボットの形態において、たとえば胸当て部として形成され、表面には種々の模様等が施され、5個の舌片部60a、60b、60c、60d、60eの各模様等の組み合わせによってたとえば威嚇的なイメージをもたせるような工夫がなされている。たとえば、本実施形態において、5個の舌片部60a、60b、60c、60d、60eの表面にはそれぞれ、舌片部60aは額、舌片部60b、60cは目、舌片部60d、60eは頬や口を表現する模様が描かれており、ロボット形態の胸当て部に5個の舌片部が放射状に配置されることによって顔が表現されるようになっている。
【0036】
そして、舌片部60a、60b、60c、60d、60eのそれぞれは、その基部に形成された支軸61a、61b、61c、61d、61eを中心として、ほぼ180°の範囲で回動(図8の矢印E方向)できるようになっている。この場合、上述した回動によって、舌片部61aは空隙部SP1を、舌片部61bは空隙部SP2を、舌片部61cは空隙部SP3を、舌片部61dは空隙部SP4を、舌片部61eは空隙部SP5をそれぞれ閉塞できるようになっている。戦闘機100Bの下面を示す図3には、舌片部60a、60b、60c、60d、60eのそれぞれが、対応する空隙部SP1、SP2、SP3、SP4、SP5内に位置づけられて配置されている状態を示している。また、戦闘機100Bの上面を示す図4においても、舌片部60a、60b、60c、60d、60eのそれぞれが、対応する空隙部SP1、SP2、SP3、SP4、SP5内に位置づけられて配置されていることが判る。
【0037】
ロボット100Aは、その頭部20、左右腕部30R、30L、左右脚部50R、50Lの上述した回動によって、飛行方向に先鋭部を有する三角形状の戦闘機100Bに変化させることができる。この場合、頭部20、左右腕部30R、30L、左右脚部50R、50Lのそれぞれをロボット100Aの形態に違和感なく構成した場合、上述した空隙部SP1、SP2、SP3、SP4、SP5が形成されてしまうのを免れ得なくなる。このため、ロボット100Aの胴体部10の胸部の個所に、たとえば胸当てとして構成した少なくとも5個の舌片部60a、60b、60c、60d、60eを形成しておき、これら各舌片部60a、60b、60c、60d、60eをそれぞれの支軸61a、61b、61c、61d、61eを中心に回動させ、外側方向に広げることによって、これらの各舌片部60a、60b、60c、60d、60eが対応する個所に形成される空隙部SP1、SP2、SP3、SP4、SP5を閉塞できるようになる。このため、戦闘機100Bは、前記空隙部SP1、SP2、SP3、SP4、SP5による孔部あるいは切り欠き部が形成されることのない三角形状として構成でき、本物の戦闘機100Bに近い形状として構成することができる。
【0038】
そして、各舌片部60a、60b、60c、60d、60eは、その支軸61a、61b、61c、61d、61eを中心にして約180°に回動させる構成としていることから、ロボット100Aの形態をとる場合と戦闘機100Bの形態をとる場合とで表裏が逆の関係となる。このため、各舌片部60a、60b、60c、60d、60eの一方の面において、ロボット100Aの一部を構成する模様、構成を付すことができ、他方の面において、戦闘機100Bの一部を構成する模様、構成を付すことができるようになる。
【0039】
胴体部10において、各舌片部60a、60b、60c、60d、60eが形成されている面は、各舌片部60a、60b、60c、60d、60eの先端が内側(胴体部の中央)に指向するように配置されている場合、ロボット100Aの胸部として機能するようになり、各舌片部60a、60b、60c、60d、60eの先端が外側に指向するように配置されている場合、戦闘機100Bの下面として機能するようになる。このため、舌片部60a、60b、60c、60d、60eを広げることによって露出される胴体部10の面には、戦闘機100Bの腹部としての形態が施されているようになっている。なお、本実施形態において、ロボット100Aの胸部の模様は複数の舌片部60a、60b、60c、60d、60eの組合せにより表現されるため、各舌片部60a、60b、60c、60d、60eの先端が外側に指向するように配置されて戦闘機100Bの形態に変化した際に、舌片部60a、60b、60c、60d、60eのそれぞれの模様は戦闘機100Bの模様とも馴染むようになる。
【0040】
なお、図3、図4に示す戦闘機100Bは、上述したと逆の操作をすることによって、図1、図2に示すロボット100Aの形態にも変形でき、ロボット100Aと戦闘機100Bの間において可逆的な変形ができることはいうまでもない。
【0041】
また、上述した実施形態では、特に、説明しなかったが、変形ロボット玩具100の各部材(左右腕部、左右脚部、舌片部等)を対応する支軸を中心に回動させる構成において、その回動の過程において、少なくともロボットあるいは戦闘機の形態をとる際にたとえばクリック作用を行わせる機構、あるいは係止部を設けるようになっていてもよい。ロボットあるいは戦闘機の形態をとった際に、各部材が元の状態に容易に戻ってしまうのを防止し、一方の形態から他方の形態に変化させる動作をしない限り、現存の形態を維持させるようにするためである。
【0042】
本発明の変形ロボット玩具は、樹脂から作られる構成としたが、これに限られることはなく、たとえば金属や木材などから構成されていてもよいことはいうまでもない。
【符号の説明】
【0043】
100……変形ロボット玩具、100A……ロボット、100B……戦闘機、10……胴体部、11R、11L……肩部、12R、12L……支軸、20……頭部、21……支軸、30R……右腕部、30L……左腕部、32R……上腕部、33R……前腕部、34R……支軸、35R、35L……連結部、40……腰部、50R……右脚部、50L……左脚部、51R……大腿部、52R……下腿部、53R……足部、54R、54L……支軸、55R、55L……支軸、60a、60b、60c、60d、60e……舌片部、61a、61b、61c、61d、61e……支軸、70……蓋部、71……支軸、72……凹部、75R、75L……ガス噴射装置、76R、76L……支軸。
【技術分野】
【0001】
本発明は変形ロボット玩具に関する。
【背景技術】
【0002】
形態が変化する種々の変形ロボット玩具が知られている。たとえば、人体の形態をなすロボットを戦闘機の形態に変化させるものもその1つとなっている。
【0003】
人体の形態をなすロボットは、他のロボットと戦闘させることによって遊技上の興味をそそらせることができ、さらに、地上での戦闘から空中戦に変化させることによって、より一層、遊技上の興味を向上させることができるからである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−070659
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、このような変形ロボット玩具を戦闘機の形態に変化させた場合、目視される戦闘機の形態において、変形前のロボットを予想させる痕跡が多く残っていたことが否めなかった。
【0006】
それ故、変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることが望まれる。
【0007】
本発明は、変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることができる変形ロボット玩具を提供することにある。
【課題を解決するための手段】
【0008】
本発明の変形ロボット玩具は、本発明の変形ロボット玩具は、胴体部、頭部、関節部を有する左右腕部、関節部を有する左右脚部を備えたロボットを戦闘機の形態に変化できる変形ロボット玩具であって、胴体部の胸部に放射状に配置され、中心側に指向する先端を前記中心側と反対側に指向できるように胴体部に対して回動可能に配置される複数の舌片部が備えられ、戦闘機は、頭部を、胴体部に対して回動させることによって胴体部の背面側に移動させ、左右腕部を、それぞれ、先端が前記胴体部の上方で近接して位置づけられるように回動させ、左右脚部を、それぞれ、大腿部と下腿部との間の関節部で回動させることにより、先端が胴体部の腰部の両脇に位置づけさせ、複数の舌片部を回動させ、これら舌片部によって、胴体部と左右腕部の間の空隙部、左右腕部と左右脚部との間の空隙部、胴体部と大腿部と下腿部との間の空隙部を閉塞することによって変形させる。
【0009】
また、本発明の変形ロボット玩具において、胴体部の背面側に凹部が形成され、頭部は凹部に収納されることが好ましい。また、本発明の変形ロボット玩具において、胴体部の背面側には、凹部を閉塞する蓋部が設けられていることが好ましい。また、本発明の変形ロボット玩具において、下腿部は大腿部に対して脚部の長手方向の周りに回動でき、下腿部の側面に備えられる噴射装置が前後方向の少なくとも一方側に位置づけられることを特徴とする。
【発明の効果】
【0010】
本発明の変形ロボット玩具によれば、変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることができるようになる。
【図面の簡単な説明】
【0011】
【図1】本発明の変形ロボット玩具の実施態様を示し、第1の形態(ロボット)をとるロボットの正面図である。
【図2】本発明の変形ロボット玩具の実施態様を示し、第1の形態をとるロボットの背面図である。
【図3】本発明の変形ロボット玩具の実施態様を示し、第2の形態(戦闘機)をとるロボットの下面図である。
【図4】本発明の変形ロボット玩具の実施態様を示し、第2の形態をとるロボットの上面図である。
【図5】本発明の変形ロボット玩具の第1の形態において、頭部を背中に形成された凹部に頭部を収納する様子を示した斜視図である。
【図6】本発明の変形ロボット玩具が第1の形態から第2の形態に変化する第1過程を示した説明図である。
【図7】本発明の変形ロボット玩具が第1の形態から第2の形態に変化する第2過程を示した説明図である。
【図8】本発明の変形ロボット玩具が第1の形態から第2の形態に変化する第3過程を示した説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態について、図面を参照しながら詳細に説明する。各図において同一の符号を付した部分は同一の部材を示している。
【0013】
(実施形態1)
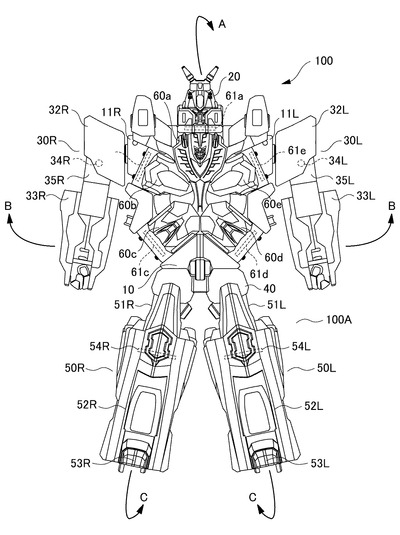
図1、図2は、それぞれ、本発明の変形ロボット玩具の実施形態1を示す正面図、背面図である。図1、図2において、変形ロボット玩具100は、人体を模したロボット(以下、単にロボット100Aという)の形態として示されている。該ロボット100Aはたとえば成型樹脂材によって構成されている。
【0014】
ロボット100Aは、胴体部10を有し、この胴体部10の上部の肩部11R、11Lの間には頭部20が取り付けられている。胴体部10の右側の肩部11Rには右腕部30Rが取り付けられ、胴体部10の左側の肩部11Lには左腕部30Lが取り付けられている。また、胴体部10の下部に相当する腰部40には右脚部50Rおよび左脚部50Lが取り付けられている。
【0015】
右腕部30R、左腕部30Lは、それぞれ、左右対称の形状および機構で形成されている。このため、たとえば右腕部30Rについて説明すると、該右腕部30Rは、肩部11Rと図示しない支軸によって軸支され、この支軸を中心にして前後方向に揺動(回動)できるようになっている。また、右腕部30Rは、肩部11R側から先端にかけて、上腕部32R、前腕部33Rから構成され、前腕部33Rは上腕部32Rと支軸34Rによって軸支されている。支軸34Rはロボット100Aの前後方向へ中心軸を有し、これにより、前腕部33Rは支軸34Rを中心にして図中B方向へ回動できるようになっている。なお、図1中、左腕部30Lを構成する各部材には、右腕部30Rの対応する部材と同数字に添字Lからなる符号(たとえば、右腕部30Rの上腕部が32Rであるのに対し、右腕部30Lの上腕部は32L)を付して示している。上述したように、左腕部30Lは右腕部30Rと同様の構成となっている。
【0016】
右脚部50R、左脚部50Lは、それぞれ、左右対称の形状および機構で形成されている。このため、右脚部50Rについて説明すると、該右脚部50Rは、腰部40と図示しない支軸によって軸支され、この支軸を中心にして前後方向に回動できるようになっている。右脚部50Rのこのような動きは、左脚部50Lの同様の動きとともに、ロボット100Aを人体と同様に前進および後退させるようにするためである。また、右脚部50Rは、腰部40側から先端にかけて、大腿部51R、下腿部52R、足部53Rから構成され、下腿部52Rは大腿部51Rと図示しない支軸によって軸支され、人体と同様、この支軸を中心にして前後方向に回動できるようになっている。また、足部53Rは、下腿部52Rと図示しない支軸によって軸支され、人体と同様、この支軸を中心にして上下方向に回動できるようになっている。なお、図1中、左脚部50Lを構成する各部材には、右脚部50Rの対応する部材と同数字に添字Lからなる符号を付して示している。上述したように、左脚部50Lは右脚部50Rと同様の構成となっている。
【0017】
なお、図1に示すように、胴体部10の胸部には、その大部分の領域において、たとえば5個の舌片部60a、60b、60c、60d、60eが放射状に配置されて構成されている。これら各舌片部60a、60b、60c、60d、60eは、中心側に指向する先端とは反対側の端部(基部)において、それぞれ支軸61a、61b、61c、61d、61eによって胴体部10に取り付けられている。これら各支軸61a、61b、61c、61d、61eは、それぞれ、各舌片部60a、60b、60c、60d、60eの端部の辺に沿って中心軸を有するように配置されている。これにより、各舌片部60a、60b、60c、60d、60eは、それぞれ、支軸61a、61b、61c、61d、61eを中心として回動でき、先端を前記中心側と反対側の方向に指向できるように配置させることができるようになっている。これら舌片部60a、60b、60c、60d、60eの動作については後述する。
【0018】
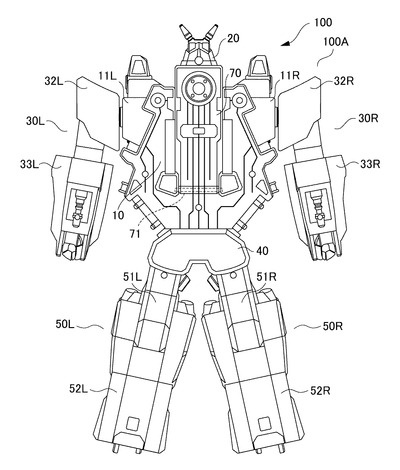
また、図2に示すように、胴体部10の背面側は、腰部40に近接する個所において支軸70によって胴体部10に軸支された蓋部70を備えている。この蓋部70は、頭部20側に延在する矩形状をなして構成されている。図2では明らかでないが、蓋部70は前記支軸71を中心に回動でき、これにより、蓋部70によって被われていた胴体部10の裏面を露出させることができるようになっている。胴体部10の蓋部70によって被われている面には、凹部(図5において符号72で示す)が形成され、後述するように、この凹部内に頭部20を収納できるようになっている。
【0019】
このように構成された形態のロボット100Aは、人体の動きとほぼ同様な動きができ、緩慢あるいは急激な走行をさせたり、あるいは、他の図示しないロボット等と戦闘させたりして、遊技上の興味をそそることができるようになっている。また、このようなロボット100Aは、机の上に載置して飾ったりすることもできることはいうまでもない。ロボット100Aの下腿部52R、52Lは、大腿部51R、51Lと比較して大きく形成され、これにより、ロボット100Aの重心が載置面に近くなり、重心の安定化が図れるようになっている。また、足部53R、53Lの形成によって載置面との当接面を大きくでき、ロボット100Aが倒れ難い構成となっている。
【0020】
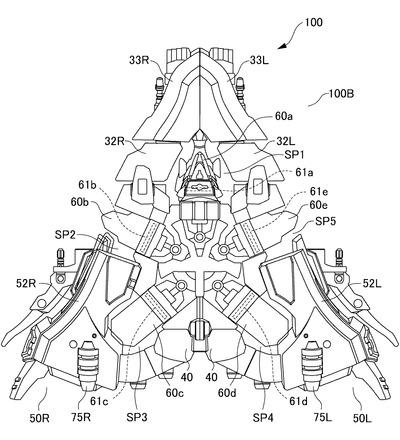
図3、図4は、図1、図2に示したロボット100Aの各構成部材を回動させることによって該ロボット100Aを変形させて得られる戦闘機100Bの形態を示した図である。図3は、戦闘機100Bの下面図で、ロボット100Aの形態の際の正面図に対応している。図4は、戦闘機100Bの上面図で、ロボット100Aの形態の際の背面図に対応している。図3、図4に示す戦闘機100Bは、飛行方向(図中上方向)に先鋭部を有するほぼ三角形状の船体からなるとともに、目視される形態からは図1、図2に示したロボット100Aを予想させる痕跡が隠されてしまっている形態となっている。すなわち、図3、図4に示す戦闘機100Bは、ロボット100Aの変形として予測させることが困難で、ロボット100Aとは別個の独自の戦闘機100Bとして構成したものと思わせる形態となっている。
【0021】
次に、本発明の変形ロボット玩具100のさらなる詳細な構成とともに、戦闘機100Bへの変形の過程を説明する。
【0022】
まず、ロボット100Aの頭部20について説明する。図5は、ロボット100Aを背面上方側から観た斜視図である。蓋部70が支軸71を中心に回動されることによって開いた状態となっており、これにより露出された凹部72に頭部20が収納されている状態を示している。
【0023】
図5に示すように、ロボット100Aの背中部の頭部20に近接する個所には凹部72が設けられている。頭部20は胴体部10との取り付け部において背中部側に配置される支軸21によって軸支されている。頭部20は前記支軸21を中心に後方へ回動でき、この回動を続けることによって頭部20は前記凹部72内に収納させることができるようになっている。図1には、同図に示す状態の頭部を矢印A方向に回動によって胴体部10の背面側へ傾倒できることを示している。前記凹部72内では頭部20は上下逆の状態で顔が後方向きに指向されて収納されることになる。そして、頭部20が収納された凹部72はロボット100Aの背中部に支軸71を中心として回動自在に設けた蓋部70によって閉塞されるようになっている(図2参照)。これにより、ロボット100Aの特徴部となる頭部20を変形ロボット玩具100の外観によって目視することができなくなる。
【0024】
次に、ロボット100Aの左右腕部(右腕部30R、左腕部30L)について説明する。右腕部30R、左腕部30Lは、それぞれ、左右対称の形状および機構で形成されている。このため、右腕部30Rについて説明すると、図1に示したように、前腕部33Rは上腕部32Rと支軸34Rによって軸支され、この支軸34Rを中心にして揺動できるようになっている。前記支軸34Rはロボット100Aの前後方向に中心軸を有し、前腕部33Rは、いわゆる手がほぼ水平となる方向(図中矢印B方向)に回動できるようになっている。この場合、前腕部33Aは、比較的細くかつ薄く形成された連結部35Rを介在させて上腕部32Rに連結(前記支軸34R等によって)され、前腕部33Rが上腕部32Rの周りに回動する過程において、該上腕部32Rとの干渉を回避させるようになっている。
【0025】
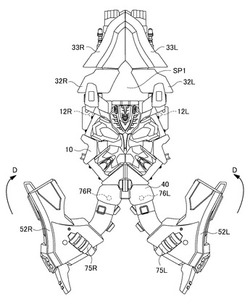
前腕部33Rの上腕部32Rに対する回動によって、前腕部33Rと上腕部32Rがいわゆる手がほぼ水平となる形態となった(図6参照)後に、さらに前腕部33Aをそのまま回動方向に移動させていく(図6中、矢印B’で示す)と、今度は、前腕部33Rおよび上腕部32Rが、直線状となったまま、肩部11Rに対して回動するようになっている。ここで、前記肩部11Rには、図6、図7に示すように、ロボット100Aの前後方向に中心軸を有する支軸12Rが取り付けられ、前腕部33Rおよび上腕部32Rは支軸12Rを中心として回動できるようになっている。
【0026】
前腕部33R、上腕部32Rの直線状の形態をとる回動は、前腕部33Rの先端(いわゆる手の部分)がロボット100Aの肩部11R、11Lの間の上方の位置(いままで頭部20があった位置)に来るまでなされるようになっている(図7参照)。左腕部30Lにおいても、上述した同様の動作を行わせることができる。これにより、図7に示すように、胴体部10の上方において、右腕部30Rの先端と左腕部30Lの先端とが当接され、戦闘機100Bの前方における先鋭部の形態をとるようになる。なお、図6、図7中、左腕部30Lを構成する上述の各部材には、右脚部30Rの対応する部材と同数字で添字Rに替えて添字Lからなる符号を付して示している。
【0027】
ここで、図7に示すように、胴体部10と右腕部30Rと左腕部30Lは、それらの間にほぼ三角形状の孔からなる空隙部SP1を形成するようになる。すなわち、胴体部10のうち肩部11R、11L側の外側面、右腕部30Rの上腕部32Rおよび前腕部33Rの上方側面(ロボット100Aの形態の際の上方側面)、左腕部30Lの上腕部32Lおよび前腕部33Lの上方側面(ロボットの形態の際の上方側面)を各辺とする空隙部SP1ができるようになる。この空隙部SP1は、胴体部10上に載置される頭部20があった部分であるが、上述したように該頭部20は背中部に形成された凹部72内に収納されていることから前記空隙部SP1は比較的大きな面積で形成されるようになっている。この空隙部SP1は、後の説明で明らかとなるように、ロボット100Aの胴体部10の胸部に形成された複数の舌片部(60a、60b、60c、60d、60e)のうちの1つの舌片部60aによって閉塞されるようになっている。
【0028】
次に、左右脚部(右脚部50R、左脚部50L)について説明をする。右脚部50R、左脚部50Lは、それぞれ、左右対称の形状および機構で形成されている。このため、右脚部50Rについて説明すると、まず、図1に示すように、下腿部52Rは、大腿部51Aに対して支軸54Rを中心として図中矢印C方向に回動でき、先端の足部53Rをロボット100Aの後方へ移動できるようになっている。下腿部52Rがこのような回動をすることによって、該下腿部52Rは、図6に示すような形態をとるようになる。図6において、下腿部52Rの両側面(ロボット100Aの形態をとっている状態で)にはそれぞれガス噴射装置75Rが取り付けられており、これらガス噴射装置75Rの噴射口が目視されるようになる。なお、ガス噴射装置75Rは、下腿部52Rの両側面に取り付けられている必要はなく、そのうちの一方の側面のみに取り付けられていてもよい。ガス噴射装置75Rは、たとえば、ロボット100Aが戦闘機100Bの形態に変化した際に該戦闘機100Bの推進のための装置となるものである。
【0029】
また、図6に示す下腿部52Rは、大腿部51Aに対して支軸55Rを中心に回動できるようになっている。前記支軸55Rは右脚部50Rの長手方向に沿った中心軸を有し、下腿部52Rは図6の矢印C方向に回動できるようになっている。これにより、図7に示すように、下腿部52Rの内側面(ロボット100Aの形態をとっている場合の内側面)に取り付けられたガス噴射装置75Rの全体像を前方から目視できるようになる。
【0030】
その後、図7に示すように、下腿部52Rは大腿部51Rに対して支軸76Rを中心に回動できるようになっている。前記支軸76Rはロボット100Aの前後方向に沿って中心軸を有し、下腿部52Rは、支軸76を中心として矢印D方向に回動でき、その先端(足部)がロボット100Aの右側腰部に近接できるように配置されるようになっている。これにより、右脚部50Rは、ロボット100Aの形態をとっている場合の前方面を外方へ指向させ、大腿部51Rと下腿部52Rとの関節を屈曲させた状態になる(図8参照)。
【0031】
左脚部50Lにおいても、右脚部50Rと同様の操作がなされ、ロボット100Aは、図8に示すような形態に変化する。なお、図中、左脚部50Lを構成する上述の各部材等には、右脚部50Rの対応する部材と同数字で添字Rに替えて添字Lからなる符号を付して示している。
【0032】
ここで、図8に示すように、胴体部10と右脚部50Rの間、胴体部10と左脚部50Lの間には、それぞれ、ほぼ矩形状の孔からなる空隙部SP3、SP4ができるようになる。すなわち、たとえば胴体部10と右脚部50Rの間の空隙部SP3について説明すれば、大腿部51Rの外側面、下腿部53Rの後側面(ロボットの形態の際の後側面)、胴体部10の外側面、腰部40の外側面を各辺とする空隙部SP3が形成されるようになる。この空隙部SP3は、戦闘機100Bの形態を平面的に観て三角形に近い状態に構成する場合、比較的大きな面積を有するようになることが免れなくなる。この空隙部SP3は、後の説明で明らかとなるように、ロボット100Aの胴体部10の胸部に形成された複数の舌片部(60a、60b、60c、60d、60e)のうちの1つの舌片部60cによって閉塞されるようになっている。
【0033】
また、図3に示すように、胴体部10の周辺であって、肩部11Rと腰部に近接して配置される下腿部52の間に、切り欠き状の空隙部SP2が形成されてしまうことが免れないものとなる。すなわち、この空隙部SP2は、肩部11R、胴体部10、下腿部52の先端を各辺として形成されるようになる。この空隙部SP2は、後の説明で明らかとなるように、ロボット100Aの胴体部10の胸部に形成された複数の舌片部(60a、60b、60c、60d、60e)のうちの1つの舌片部60bによって閉塞されるようになっている。
【0034】
なお、上述のような空隙部は、図8に示すように、上述した空隙部SP2、SP3の他に、胴体部10と左脚部52Lとの間に空隙部SP4が形成され、また、胴体部10と肩部11Lと下腿部52Lとの間に空隙部SP5が形成されるようになっている。
【0035】
次に、胴体部10について説明をする。胴体部10は、その前方面(ロボットの形態の際の前方部)の大部分の領域を被うようにして、たとえば5個の舌片部60a、60b、60c、60d、60eが配置されていることは上述した通りである。これら舌片部60a、60b、60c、60d、60eは、ロボットの形態において、たとえば胸当て部として形成され、表面には種々の模様等が施され、5個の舌片部60a、60b、60c、60d、60eの各模様等の組み合わせによってたとえば威嚇的なイメージをもたせるような工夫がなされている。たとえば、本実施形態において、5個の舌片部60a、60b、60c、60d、60eの表面にはそれぞれ、舌片部60aは額、舌片部60b、60cは目、舌片部60d、60eは頬や口を表現する模様が描かれており、ロボット形態の胸当て部に5個の舌片部が放射状に配置されることによって顔が表現されるようになっている。
【0036】
そして、舌片部60a、60b、60c、60d、60eのそれぞれは、その基部に形成された支軸61a、61b、61c、61d、61eを中心として、ほぼ180°の範囲で回動(図8の矢印E方向)できるようになっている。この場合、上述した回動によって、舌片部61aは空隙部SP1を、舌片部61bは空隙部SP2を、舌片部61cは空隙部SP3を、舌片部61dは空隙部SP4を、舌片部61eは空隙部SP5をそれぞれ閉塞できるようになっている。戦闘機100Bの下面を示す図3には、舌片部60a、60b、60c、60d、60eのそれぞれが、対応する空隙部SP1、SP2、SP3、SP4、SP5内に位置づけられて配置されている状態を示している。また、戦闘機100Bの上面を示す図4においても、舌片部60a、60b、60c、60d、60eのそれぞれが、対応する空隙部SP1、SP2、SP3、SP4、SP5内に位置づけられて配置されていることが判る。
【0037】
ロボット100Aは、その頭部20、左右腕部30R、30L、左右脚部50R、50Lの上述した回動によって、飛行方向に先鋭部を有する三角形状の戦闘機100Bに変化させることができる。この場合、頭部20、左右腕部30R、30L、左右脚部50R、50Lのそれぞれをロボット100Aの形態に違和感なく構成した場合、上述した空隙部SP1、SP2、SP3、SP4、SP5が形成されてしまうのを免れ得なくなる。このため、ロボット100Aの胴体部10の胸部の個所に、たとえば胸当てとして構成した少なくとも5個の舌片部60a、60b、60c、60d、60eを形成しておき、これら各舌片部60a、60b、60c、60d、60eをそれぞれの支軸61a、61b、61c、61d、61eを中心に回動させ、外側方向に広げることによって、これらの各舌片部60a、60b、60c、60d、60eが対応する個所に形成される空隙部SP1、SP2、SP3、SP4、SP5を閉塞できるようになる。このため、戦闘機100Bは、前記空隙部SP1、SP2、SP3、SP4、SP5による孔部あるいは切り欠き部が形成されることのない三角形状として構成でき、本物の戦闘機100Bに近い形状として構成することができる。
【0038】
そして、各舌片部60a、60b、60c、60d、60eは、その支軸61a、61b、61c、61d、61eを中心にして約180°に回動させる構成としていることから、ロボット100Aの形態をとる場合と戦闘機100Bの形態をとる場合とで表裏が逆の関係となる。このため、各舌片部60a、60b、60c、60d、60eの一方の面において、ロボット100Aの一部を構成する模様、構成を付すことができ、他方の面において、戦闘機100Bの一部を構成する模様、構成を付すことができるようになる。
【0039】
胴体部10において、各舌片部60a、60b、60c、60d、60eが形成されている面は、各舌片部60a、60b、60c、60d、60eの先端が内側(胴体部の中央)に指向するように配置されている場合、ロボット100Aの胸部として機能するようになり、各舌片部60a、60b、60c、60d、60eの先端が外側に指向するように配置されている場合、戦闘機100Bの下面として機能するようになる。このため、舌片部60a、60b、60c、60d、60eを広げることによって露出される胴体部10の面には、戦闘機100Bの腹部としての形態が施されているようになっている。なお、本実施形態において、ロボット100Aの胸部の模様は複数の舌片部60a、60b、60c、60d、60eの組合せにより表現されるため、各舌片部60a、60b、60c、60d、60eの先端が外側に指向するように配置されて戦闘機100Bの形態に変化した際に、舌片部60a、60b、60c、60d、60eのそれぞれの模様は戦闘機100Bの模様とも馴染むようになる。
【0040】
なお、図3、図4に示す戦闘機100Bは、上述したと逆の操作をすることによって、図1、図2に示すロボット100Aの形態にも変形でき、ロボット100Aと戦闘機100Bの間において可逆的な変形ができることはいうまでもない。
【0041】
また、上述した実施形態では、特に、説明しなかったが、変形ロボット玩具100の各部材(左右腕部、左右脚部、舌片部等)を対応する支軸を中心に回動させる構成において、その回動の過程において、少なくともロボットあるいは戦闘機の形態をとる際にたとえばクリック作用を行わせる機構、あるいは係止部を設けるようになっていてもよい。ロボットあるいは戦闘機の形態をとった際に、各部材が元の状態に容易に戻ってしまうのを防止し、一方の形態から他方の形態に変化させる動作をしない限り、現存の形態を維持させるようにするためである。
【0042】
本発明の変形ロボット玩具は、樹脂から作られる構成としたが、これに限られることはなく、たとえば金属や木材などから構成されていてもよいことはいうまでもない。
【符号の説明】
【0043】
100……変形ロボット玩具、100A……ロボット、100B……戦闘機、10……胴体部、11R、11L……肩部、12R、12L……支軸、20……頭部、21……支軸、30R……右腕部、30L……左腕部、32R……上腕部、33R……前腕部、34R……支軸、35R、35L……連結部、40……腰部、50R……右脚部、50L……左脚部、51R……大腿部、52R……下腿部、53R……足部、54R、54L……支軸、55R、55L……支軸、60a、60b、60c、60d、60e……舌片部、61a、61b、61c、61d、61e……支軸、70……蓋部、71……支軸、72……凹部、75R、75L……ガス噴射装置、76R、76L……支軸。
【特許請求の範囲】
【請求項1】
胴体部、頭部、関節部を有する左右腕部、関節部を有する左右脚部を備えたロボットを戦闘機の形態に変化できる変形ロボット玩具であって、
前記胴体部の胸部に放射状に配置され、中心側に指向する先端を前記中心側と反対側に指向できるように前記胴体部に対して回動可能に配置される複数の舌片部が備えられ、
前記戦闘機は、前記頭部を、前記胴体部に対して回動させることによって前記胴体部の背面側に移動させ、
前記左右腕部を、それぞれ、先端が前記胴体部の上方で近接して位置づけられるように回動させ、
前記左右脚部を、それぞれ、大腿部と下腿部との間の関節部で回動させることにより、先端が前記胴体部の腰部の両脇に位置づけさせ、
前記複数の舌片部を回動させ、これら舌片部によって、前記胴体部と前記左右腕部の間の空隙部、前記左右腕部と左右脚部との間の空隙部、前記胴体部と大腿部と下腿部との間の空隙部を閉塞することによって変形させる変形ロボット玩具。
【請求項2】
請求項1において、
前記胴体部の背面側に凹部が形成され、前記頭部は前記凹部に収納される変形ロボット玩具。
【請求項3】
請求項2において、
前記胴体部の背面側には、前記凹部を閉塞する蓋部が設けられている変形ロボット玩具。
【請求項4】
請求項1乃至請求項3のいずれか一項において、
前記下腿部は大腿部に対して脚部の長手方向の周りに回動でき、前記下腿部の側面に備えられる噴射装置が前後方向の少なくとも一方側に位置づけられる変形ロボット玩具。
【請求項5】
請求項1乃至請求項4のいずれか一項において、
前記複数の舌片部は、第1乃至第5の舌片部を有し、前記第1の舌片部には額、前記第2の舌片部と前記第3の舌片部には目、前記第4の舌片部と前記第5の舌片部には頬や口を表現する模様が描かれている変形ロボット玩具。
【請求項1】
胴体部、頭部、関節部を有する左右腕部、関節部を有する左右脚部を備えたロボットを戦闘機の形態に変化できる変形ロボット玩具であって、
前記胴体部の胸部に放射状に配置され、中心側に指向する先端を前記中心側と反対側に指向できるように前記胴体部に対して回動可能に配置される複数の舌片部が備えられ、
前記戦闘機は、前記頭部を、前記胴体部に対して回動させることによって前記胴体部の背面側に移動させ、
前記左右腕部を、それぞれ、先端が前記胴体部の上方で近接して位置づけられるように回動させ、
前記左右脚部を、それぞれ、大腿部と下腿部との間の関節部で回動させることにより、先端が前記胴体部の腰部の両脇に位置づけさせ、
前記複数の舌片部を回動させ、これら舌片部によって、前記胴体部と前記左右腕部の間の空隙部、前記左右腕部と左右脚部との間の空隙部、前記胴体部と大腿部と下腿部との間の空隙部を閉塞することによって変形させる変形ロボット玩具。
【請求項2】
請求項1において、
前記胴体部の背面側に凹部が形成され、前記頭部は前記凹部に収納される変形ロボット玩具。
【請求項3】
請求項2において、
前記胴体部の背面側には、前記凹部を閉塞する蓋部が設けられている変形ロボット玩具。
【請求項4】
請求項1乃至請求項3のいずれか一項において、
前記下腿部は大腿部に対して脚部の長手方向の周りに回動でき、前記下腿部の側面に備えられる噴射装置が前後方向の少なくとも一方側に位置づけられる変形ロボット玩具。
【請求項5】
請求項1乃至請求項4のいずれか一項において、
前記複数の舌片部は、第1乃至第5の舌片部を有し、前記第1の舌片部には額、前記第2の舌片部と前記第3の舌片部には目、前記第4の舌片部と前記第5の舌片部には頬や口を表現する模様が描かれている変形ロボット玩具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−11229(P2012−11229A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2011−212489(P2011−212489)
【出願日】平成23年9月28日(2011.9.28)
【分割の表示】特願2010−150950(P2010−150950)の分割
【原出願日】平成22年7月1日(2010.7.1)
【出願人】(000135748)株式会社バンダイ (246)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【分割の表示】特願2010−150950(P2010−150950)の分割
【原出願日】平成22年7月1日(2010.7.1)
【出願人】(000135748)株式会社バンダイ (246)
【Fターム(参考)】
[ Back to top ]