
変速制御装置及び変速制御方法
【課題】回生効率を向上させることが可能な変速制御装置及び変速制御方法を提供する。
【解決手段】動作制御装置10は、エンジンとモータ3とが第1クラッチ4を介して接続され、モータ3と駆動輪との間に無段変速機構5が配置されたハイブリッド車両に搭載されるものである。この動作制御装置10は、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御部12と、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部12による変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行する第2変速制御部13と、を備えている。
【解決手段】動作制御装置10は、エンジンとモータ3とが第1クラッチ4を介して接続され、モータ3と駆動輪との間に無段変速機構5が配置されたハイブリッド車両に搭載されるものである。この動作制御装置10は、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御部12と、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部12による変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行する第2変速制御部13と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変速制御装置及び変速制御方法に関する。
【背景技術】
【0002】
従来、エンジンの駆動軸とモータの駆動軸との間に第1クラッチを設け、無段変速機と駆動輪との間に第2クラッチを設けたハイブリッド車用駆動装置が提案されている。このハイブリッド車用駆動装置は車両減速時に第1クラッチを切断する。これにより、エンジンブレーキを駆動輪に作用させることなく、モータによる回生ブレーキのみを作用させることができ、減速によるブレーキ回生によるエネルギーの回収を効率よく行うことができる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−23313号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載のハイブリッド車用駆動装置では、第1クラッチ解放後に直ぐにエンジン始動が要求される場合など、減速時に第1クラッチを締結した状態で維持した方が良い場合がある。このような場合、減速時に第1クラッチが切断されず締結されていることから、第1クラッチを介してモータとエンジンとが連結され、エンジンの損失トルクにより回生エネルギーが低減して回生効率が低下してしまう。
【0005】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、回生効率を向上させることが可能な変速制御装置及び変速制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の変速制御装置は、エンジンとモータとがクラッチを介して接続され、当該モータと駆動輪との間に変速機が配置されたハイブリッド車両の変速制御装置である。この変速制御装置は、車両減速時にクラッチを切断して回生する場合、変速機の伝達効率及びモータの発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御手段と、車両減速時に前記クラッチを締結して回生する場合、第1変速制御手段による変速制御の実行時より、変速機の変速比を小さくする変速制御を実行する第2変速制御手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、車両減速時にクラッチを切断して回生する場合、変速機の伝達効率及びモータの発電効率の少なくとも一方に基づいて変速制御を実行するため、変速機の伝達効率やモータの発電効率を適切とし、減速時の回生効率を高めることができる。また、車両減速時にクラッチを締結して回生する場合、上記変速制御の実行時より、変速機の変速比を小さくする変速制御を実行する。ここで、変速比を小さくするとエンジントルク損失を小さくできる。よって、クラッチが締結されてモータとエンジンとが接続状態であるときに、エンジントルク損失を小さくして、減速時の回生効率を高めることができる。従って、クラッチを締結状態で維持した場合においても回生効率を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】本実施形態に係る動作制御装置が搭載されるハイブリッド車両を示す概略構成図である。
【図2】本実施形態に係る動作制御装置を示すブロック図である。
【図3】モータの回転速度とモータトルクに対するモータの発電効率の関係を示す相関図である。
【図4】エンジンの回転速度とエンジントルク損失との関係を示す相関図である。
【図5】エンジン損失トルクによるブレーキトルク(エンブレトルク)(ドライブシャフト軸換算)と車速との関係を示す相関図であって、(a)は最High時における相関を示し、(b)はMid時における相関を示している。
【図6】無段変速機構の伝達効率と変速比との関係を示す相関図である。
【図7】本実施形態に係る変速制御方法を示すフローチャートである。
【図8】ハイブリッド車両の挙動に応じた各種データを示すグラフであって、(a)は車速〔km/h〕を示し、(b)は回生エネルギー〔kJ〕を示し、(c)は変速比を示し、(d)はモータ入力回転数〔rpm〕を示し、(e)はモータ入力トルク〔Nm〕を示している。
【発明を実施するための形態】
【0009】
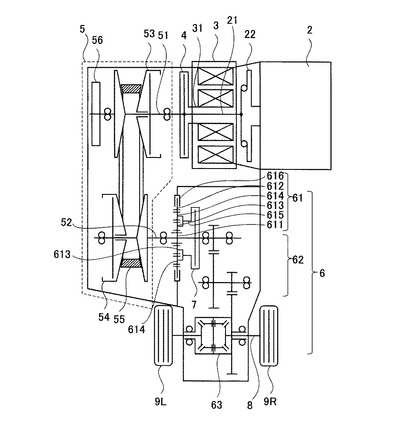
以下、本発明の好適な実施形態を図面に基づいて説明する。図1は、本実施形態に係る動作制御装置が搭載されるハイブリッド車両を示す概略構成図である。図1に示すように、ハイブリッド車両は、エンジン2と、モータ3と、第1クラッチ(クラッチ)4と、無段変速機構(変速機)5と、伝達機構6と、第2クラッチ7と、駆動軸8と、駆動輪9L,9Rとを備えている。
【0010】
エンジン2は、ガソリン等の燃料によって駆動する内燃機関であって、駆動によって回転駆動する駆動軸21を備えている。また、駆動軸21はトルク吸収ダンパー22を備えている。トルク吸収ダンパー22は、エンジン2の一回転毎に生じるトルク変動を抑制する。なお、エンジン2は、内燃機関に限定されず、スターリング機関等の外燃機関であってもよい。
【0011】
モータ3は、電力供給により駆動する電動機であって、駆動によって回転駆動する駆動軸31を備えている。また、モータ3は、外部から駆動軸31に対して回転トルクを受けると、これに応じて発電を行う発電機としても機能する。モータ3の駆動軸31は、中空となっており、その内部には、エンジンの駆動軸21が同一の中心軸を通って遊挿されている。
【0012】
第1クラッチ4は、駆動軸21,31それぞれの同じ側の端部において、両者を締結及び切断するものである。また、モータ3の駆動軸31は、クラッチ4の断続動作とは無関係に、無段変速機構5と直結されている。すなわち、第1クラッチ4が締結されている場合、エンジン2及びモータ3の駆動軸21,31が無段変速機構5と接続され、第1クラッチ4が切断されている場合、モータ3の駆動軸31のみが無段変速機構5と接続されることとなる。第1クラッチ4は、外部からの操作により締結及び切断が切り替えられる。
【0013】
無段変速機構5は、いわゆるCVT(Continuously Variable Transmission)であって、入力軸51と出力軸52とを備え、入力軸51と出力軸52とにプーリ53,54を備えている。これらのプーリ53,54は、ベルト55によって連結され、同時に回転を行う。また、無段変速機構5は、オイルポンプ56を備えている。無段変速機構5は、オイルポンプ56からのオイル供給により、プーリ53,54に対するベルト受け面の幅を変えることができる。このため、ベルト55は、各プーリ53,54上での回転半径を自在に変えることができ、これにより、各プーリ53,54に連動する入力軸51及び出力軸52の回転数比(変速比)が自在に調節される。
【0014】
無段変速機構5は、出力軸52、伝達機構6、及び第2クラッチ7を介して2つの駆動輪9L,9Rに伝達される。伝達機構6は、ダブルピニオン式遊星歯車機構61と、歯車列62と、作動装置63とを備えている。
【0015】
ダブルピニオン式遊星歯車機構61は、太陽歯車611と、内歯車612と、ダブルピニオン613,614と、アーム615と、後進ブレーキ616とを備えている。太陽歯車611は、出力軸52を中心軸とする歯車であって、出力軸52の動きに連動する。内歯車612は、太陽歯車611と同一の中心軸上にある歯車である。
【0016】
ダブルピニオン613,614は、互いに噛み合う歯車である。また、ダブルピニオン613,614のうち一方は太陽歯車611とも噛み合い、他方は内歯車612とも噛み合っている。アーム615は、ダブルピニオン613,614を公転自在に保持するものである。このアーム615は、前述したダブルピニオン613,614を出力軸52を挟んで対称にもう一対保持している。さらに、このアーム615は第2クラッチ7を介して出力軸52に接続されている。また、後進ブレーキ616は、内歯車612の外側からその回転を規制するものである。
【0017】
このような構成であるため、第2クラッチ7が接続され、後進ブレーキ616により内歯車612が回転を規制されてないとする。この場合、太陽歯車611が回転すると、アーム615及び内歯車612も一体となって同じ方向に回転する。このため、出力軸52の回転は、そのまま下流側の歯車列62に伝達される。
【0018】
一方、第2クラッチ7が切断され、後進ブレーキ616により内歯車612が回転を規制されたとする。この場合、太陽歯車611が回転すると、当該太陽歯車611と内歯車612との間において、ダブルピニオン613,614は、太陽歯車611と逆方向に公転する。このため、出力軸52の回転とは逆方向の回転が、下流側の歯車列62に伝達される。
【0019】
歯車列62は、複数の歯車が噛み合った状態で配列されたものである。このため、歯車列62に伝達された回転は、当該歯車列62を構成する複数の歯車によって減速され、差動装置63に伝えられる。この差動装置63は、歯車列62から伝達されたトルクを各駆動輪9L,9Rに伝達しつつも、カーブの走行で生じる各駆動輪9L,9Rの回転数差を許容する。
【0020】
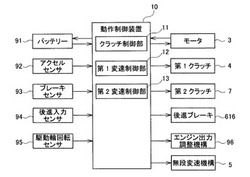
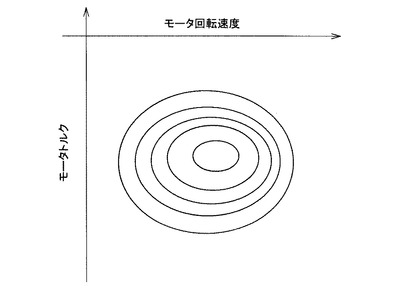
図2は、本実施形態に係る動作制御装置を示すブロック図である。なお、図2では、動作制御装置の接続関係を明確にするために各種構成についても図示している。図2に示すように、動作制御装置(変速制御装置)10は各種信号を入力して各部を制御する機能を有している。
【0021】
具体的に動作制御装置10は、アクセルセンサ92、ブレーキセンサ93、後進入力センサ94、駆動輪回転センサ95、及びエンジン出力調整機構96を備えている。アクセルセンサ92は、ハイブリッド車両の加速用アクセルペダルの踏み込み量を検出するセンサである(具体的には、直動変位量を検出するセンサ)。ブレーキセンサ93は、ハイブリッド車両の制動用のブレーキペダルの踏み込み量を検出するセンサである(アクセルセンサと同種のセンサ)。後進入力センサ94は、ハイブリッド車の操縦者が後進の操作を入力した場合にこれを検出するセンサ(具体的には、マイクロスイッチ等)である。駆動輪回転センサ95は、駆動輪9Lの回転軸に装備され、その回転数を検出するセンサである(具体的には、エンコーダ等)。エンジン出力調整機構96は、エンジンのスロットル回度を調整し、出力調整を行う機構である。動作制御装置10は、各センサ92〜95の
出力に基づいて、エンジン出力調整機構96の出力調整を行うこととなる。
【0022】
また、動作制御装置10は、バッテリー91を備えており、モータ3に電力を供給したりモータ3の発電により充電を行ったりする。
【0023】
ここで、ハイブリッド車両が減速する場合、第1クラッチ4を切断することによってエンジン2を切り離して駆動輪9L,9Rの回転をモータ3に伝えることができ、これにより、回生効率を高めることができる。
【0024】
ところが、第1クラッチ4を切断することなく回生を行った方がよい場合がある。例えば減速中に運転者が再加速を要求した場合に、再加速に必要なトルクがモータ3にて発生可能な最大トルクより大きいとする。この場合、モータ3のトルクだけでは再加速できなくなってしまうため、第1クラッチ4を切断することなく回生を行った方がよい。より詳細に、上記場合に第1クラッチ4を切断してしまうと、再加速要求後、第1クラッチ4を締結し、エンジン2を始動してエンジントルクを発生させる手順となってしまう。このため、エンジントルク発生までのタイムラグが大きくなり、運転者に違和感を与えてしまう。
【0025】
そこで、本実施形態において動作制御装置10は、クラッチ制御部(クラッチ制御手段)11と、第1変速制御部(第1変速制御手段)12と、第2変速制御部(第2変速制御手段)13とを備えている。
【0026】
クラッチ制御部11は、減速時にモータ3のみによって再加速できるか否かに基づいて、第1クラッチ4を切断して回生するか、第1クラッチ4を締結して回生するかを制御するものである。このクラッチ制御部11は、再加速に必要なトルクがモータ3にて発生可能な最大トルク以上であるか否かに基づいて、第1クラッチ4を切断して回生するか、第1クラッチ4を締結して回生するかを制御する。
【0027】
第1変速制御部12は、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行するものである。具体的に第1変速制御部12は、例えば無段変速機構5の伝達効率を考慮して、ロスが少なくなるように変速比を調整する。また、第1変速制御部12は、モータ3の発電効率を考慮し、発電効率が高くなるように変速比を調整する。
【0028】
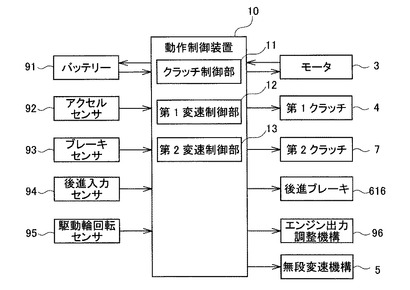
図3は、モータ3の回転速度とモータトルクに対するモータ3の発電効率の関係を示す相関図である。図3において横軸を回転速度とし、縦軸をモータトルクとすると、モータ3の発電効率は、図3に示すように楕円に近い形状で示される。図中において1つの線(すなわち1つの楕円)は、発電効率の同じ値を示していて、内側に位置する線ほどモータ3の発電効率が高い。この相関図は、モータ3の固有の特性によって決まるものである。この相関図に相当するデータを用いることによって、第1変速制御部12は、モータ3の発電効率が高くなるようなモータ回転速度とモータトルクとのそれぞれの値をとるように、無段変速機構5の変速比を決定することができる。これにより、モータ3の発電効率を高めて減速時の回生効率を高めることができる。
【0029】
また、第1変速制御部12は、第1クラッチ4を切断して回生するにあたり、モータ3が許容可能なモータ許容トルク以下となるように変速比を調整する。モータ許容トルクを超えて回生トルクがモータ3にて回収できなくなってしまう事態を防止し、モータ3の発電効率を高めることとなる。
【0030】
さらに、第1変速制御部12は、車両減速が継続されてハイブリッド車両が停止すると
きに変速比が最も高くなるように、変速制御を実行する。このため、仮に減速が継続されてハイブリッド車両が停止してしまっても、その車両発進をスムーズに行うことができるからである。
【0031】
第2変速制御部13は、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部11による変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行するものである。ここで、変速比を小さくするとエンジントルク損失を小さくできる。よって、第1クラッチ4が締結されてモータ3とエンジン2とが接続状態であるときに、エンジントルク損失を小さくして、減速時の回生効率を高めることができる。
【0032】
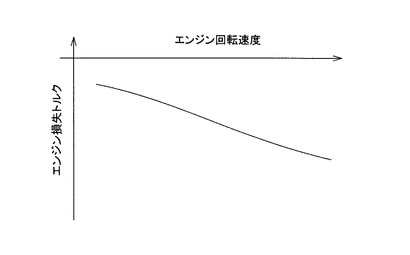
図4は、エンジン2の回転速度とエンジントルク損失との関係を示す相関図である。図4に示すように、エンジン2の回転速度が低くなるほど、エンジン損失トルクは小さくなる傾向にある。このため、第2変速制御部13は、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部11による変速制御の実行時より無段変速機構5の変速比を小さくして(すなわちHigh側にして)、エンジンの回転速度を低くしてエンジン損失トルクを小さくする。これにより、回生効率を高めることとしている。
【0033】
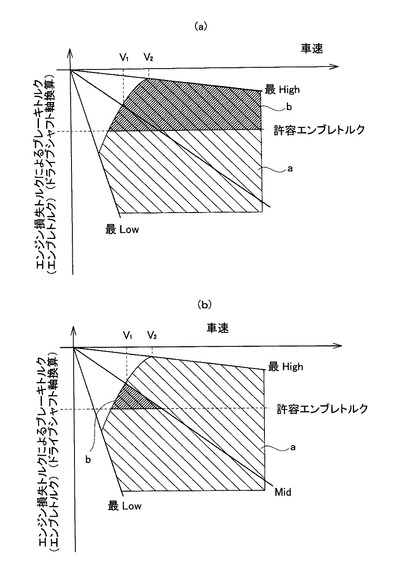
図5は、エンジン損失トルクによるブレーキトルク(エンブレトルク)(ドライブシャフト軸換算)と車速との関係を示す相関図であって、(a)は最High時における相関を示し、(b)はMid時における相関を示している。まず、減速が継続されてハイブリッド車両が停止してしまっても、その車両発進をスムーズに行うために、最Lowまでの戻り性能が確保されていることが必要である。図5(a)及び図5(b)に、最Lowまで戻り可能な領域aを示す。図5(a)及び図5(b)に示すように、第1クラッチ4を締結した減速状態において、ギアが現在最Highであれば、車速がv2以上である場合に、最Lowまで戻り可能であるといえる。また、第1クラッチ4を締結した減速状態において、ギアが現在Midであれば、車速がv1以上である場合に、最Lowまで戻り可能であるといえる。
【0034】
また、ハイブリッド車両の乗り心地を考慮すると、許容できるエンブレトルクが存在する。すなわち、エンブレトルクが大きくなり過ぎると、エンジンブレーキが効きすぎて乗り心地が悪化してしまう。このため、エンブレトルクは、図5(a)及び図5(b)に示す許容エンブレトルク以下である必要がある。
【0035】
以上より、回収できる回生トルク(領域b参照)が決定する。ここで、図5(a)及び図5(b)に示すように、最High時における領域bの方がMid時における領域bよりも広くなっている。このため、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部11による変速制御の実行時より無段変速機構5の変速比を小さくすると、回生効率がよいといえる。
【0036】
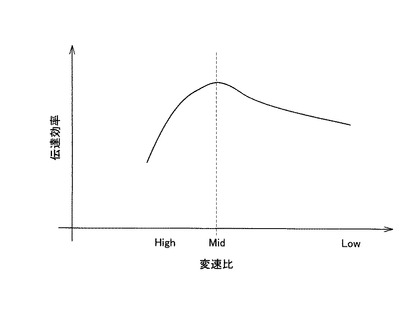
図6は、無段変速機構5の伝達効率と変速比との関係を示す相関図である。第2変速制御部13は、無段変速機構5の伝達効率についても考慮して、無段変速機構5を制御することが望ましい。図6に示すように、無段変速機構5には変速比に応じて伝達ロスが異なる傾向がある。このため、第2変速制御部13は、変速比を小さくし過ぎて伝達効率が極度に悪化しない程度に、無段変速機構5をhigh側とすることが望ましい。第1変速制御部12において無段変速機構5の伝達効率に基づいて変速制御を実行する際にも、図5の相関図を用いて変速比を求める。
【0037】
次に、図7を参照して、本実施形態に係る変速制御方法を説明する。図7は、本実施形態に係る変速制御方法を示すフローチャートである。なお、図7に示すフローチャートは、ハイブリッド車両が減速中である限り、繰り返し実行される。
【0038】
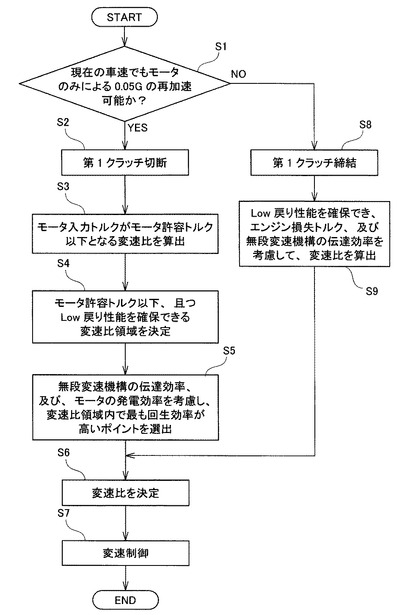
図7に示すように、まずクラッチ制御部11は、現在の車速でモータ3のみによる0.05Gの再加速が可能か否かを判断する(S1)。現在の車速でモータ3のみによる0.05Gの再加速が可能であると判断した場合(S1:YES)、クラッチ制御部11は、第1クラッチ4を切断状態とする(S2)。
【0039】
その後、第1変速制御部12は、駆動輪9L,9R側からモータ3に入力されるモータ入力トルクがモータ許容トルク以下となる変速比を算出する(S3)。次いで、第1変速制御部12は、モータ許容トルク以下で、且つ、Low戻り性能を確保できる変速比領域を決定する(S4)。
【0040】
次に、第1変速制御部12は、無段変速機構5の伝達効率、及び、モータ3の発電効率を考慮し、ステップS4において決定された変速比領域内で最も回生効率が高いポイントを選出する(S5)。その後、第1変速制御部12は、回生効率が最も高いポイントから算出される変速比に決定し(S6)、変速制御を実行する(S7)。その後、図7に示す処理は終了する。
【0041】
一方、現在の車速でモータ3のみによる0.05Gの再加速が可能でないと判断した場合(S1:NO)、クラッチ制御部11は、第1クラッチ4を締結状態とする(S8)。次に、第2変速制御部13は、Low戻り性能を確保でき、エンジン損失トルク及び無段変速機構5の伝達効率を考慮して変速比を算出する(S9)。このとき、第2変速制御部13は、図5に示したようにLow戻り性能を確保できる領域aと、図4に示したようなエンジン損失トルクとエンジン回転速度との相関データと、図6に示したような変速比と伝達効率との相関データとから、変速比を算出する。
【0042】
その後、第2変速制御部13は、変速比を決定し(S6)、変速制御を実行する(S77)。そして、図7に示す処理は終了する。
【0043】
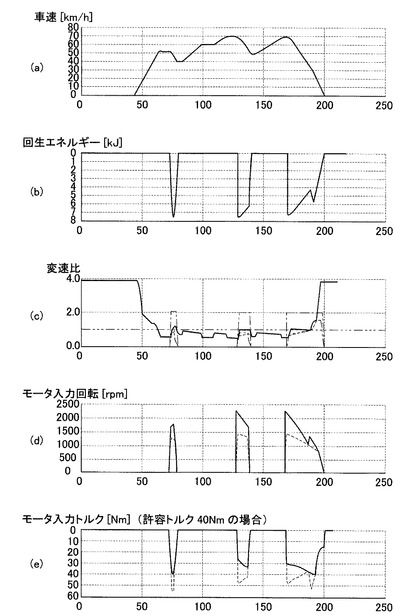
図8は、ハイブリッド車両の挙動に応じた各種データを示すグラフであって、(a)は車速〔km/h〕を示し、(b)は回生エネルギー〔kJ〕を示し、(c)は変速比を示し、(d)はモータ入力回転数〔rpm〕を示し、(e)はモータ入力トルク〔Nm〕を示している。なお、図8に示す各種データは、第1クラッチ4が切断されたときに第1変速制御部12による制御が実行されたときのデータを示している。
【0044】
まず、図8(a)に示すように、時刻45〔任意単位〕においてハイブリッド車両が加速を開始し、時刻60付近で車速が50km/hとなったとする。この間において車両は減速中でなく、図8(b)に示すように回生エネルギーは0kJである。また、図8(d)及び図8(e)に示すように、モータ3に入力される回転数及びモータ3に入力されるトルクは、それぞれ0rpm及び0Nmである。さらに、図8(b)に示すように、この間において車速が高くなるのに伴って変速比は小さくなっていく。
【0045】
そして、図8(a)に示すように、ハイブリッド車両は時刻73付近まで定速走行した後、時刻78付近まで減速する。このとき、クラッチ制御部11は、第1クラッチ4を切断状態とする。そして、Low戻り性能を確保するのみで制御を実行すると、図8(c)〜図8(e)に示すように、変速比は1未満となり、モータ入力回転数は1300rpmとなり、モータ入力トルクは55Nmとなる(図8(c)〜図8(e)の破線参照)。なお、図8(c)の一点鎖線に示す減速フラグは減速時に発生するフラグである。
【0046】
ところが、本実施形態のようにLow戻り性能のみでなく、モータ許容トルク及び無段変速機構5の伝達効率を考慮すると、図8(c)〜図8(e)の実線に示すようになる。
すなわち、モータ許容トルクが40Nmであるとすると、図8(c)の実線に示すように変速比が1.2程度とされる。この結果、図8(e)の実線に示すようにモータ入力トルクが40Nmとなる。なお、図8(d)の実線に示すように、変速比が1.2程度となるため、モータ入力回転数は1800rpmとなる。また、このときの回生エネルギーは図8(b)に示すように7.5kJである。さらに、図8(c)に示す二点鎖線はモータ入力トルクが40Nmとなる変速比である。
【0047】
次いで、時刻130付近まで加速及び定速走行が行われた後に、時刻140付近まで減速が行われたとする。この場合もモータ入力トルクはモータ許容トルクである40Nm以下に制御される。さらに、第1変速制御部12は、無段変速機構5の伝達効率についても考慮している。このため、変速比が0.8程度であればモータ入力トルクは40Nmとすることができるが、第1変速制御部12は、変速比が1である場合に最も伝達効率が高いとするならば(図8(c)の三点鎖線参照)、変速比を1に設定する。これにより、図8(e)の実線に示すようにモータ入力トルクが30Nmとなる。なお、図8(d)の実線に示すように、変速比が1.0程度となるため、モータ入力回転数は2200rpm付近となる。また、回生エネルギーは図8(b)に示すように7.5kJ付近となる。
【0048】
さらに、時刻170〜時刻200における減速についても同様に、第1変速制御部12は、Low戻り性能、モータ許容トルク、及び無段変速機構5の伝達効率に基づいて変速比が決定されることとなる。
【0049】
このようにして、本実施形態に係る動作制御装置10及び変速制御方法によれば、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行するため、無段変速機構5の伝達効率やモータ3の発電効率を適切とし、減速時の回生効率を高めることができる。また、車両減速時に第1クラッチ4を締結して回生する場合、上記変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行する。ここで、変速比を小さくするとエンジントルク損失を小さくできる。よって、第1クラッチ4が締結されてモータ3とエンジン2とが接続状態であるときに、エンジントルク損失を小さくして、減速時の回生効率を高めることができる。従って、第1クラッチ4を締結状態で維持した場合においても回生効率を向上させることができる。
【0050】
また、第1クラッチ4を切断して回生するにあたり、モータ3が許容可能なモータ許容トルク以下となるように変速制御を実行するため、モータ許容トルクを超えて回生トルクがモータ3にて回収できなくなってしまう事態を防止することができる。さらに、車両減速が継続されてハイブリッド車両が停止するときに変速比が最も高くなるように変速制御を実行するため、仮にハイブリッド車両が停止してしまっても、その車両発進をスムーズに行うことができる。
【0051】
また、減速時にモータ3のみによって再加速できるか否かに基づいて、第1クラッチ4を切断して回生するか、第1クラッチ4を締結して回生するかを制御する。ここで、減速時にモータ3のみによって再加速できない場合、エンジン2を利用して再加速する必要がある。一方、減速時にモータ3のみによって再加速できる場合、エンジン2を利用する必要がない。よって、上記のように制御することで、回生効率を向上させつつも加速性能を保持することができる。
【0052】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものでは無く、本発明の趣旨を逸脱しない範囲で、変更を加えてもよい。
【0053】
例えば、上記実施形態において、ハイブリッド車両は無段変速機構5を備えているが、
これに限らず、無段変速機構5でなくともよい。また、ハイブリッド車両は第2クラッチ7を備えているが、第2クラッチ7を備えてなくともよい。
【符号の説明】
【0054】
1…ハイブリッド車両
2…エンジン
3…モータ
4…第1クラッチ(クラッチ)
5…無段変速機構(変速機)
6…伝達機構
7…第2クラッチ
8…駆動軸
9L,9R…駆動輪
10…動作制御装置(変速制御装置)
11…クラッチ制御部(クラッチ制御手段)
12…第1変速制御部(第1変速制御手段)
13…第2変速制御部(第2変速制御手段)
21…駆動軸
22…トルク吸収ダンパー
31…駆動軸
51…入力軸
52…出力軸
53,54…プーリ
55…ベルト
56…オイルポンプ
61…ダブルピニオン式遊星歯車機構
62…歯車列
63…作動装置
91…バッテリー
92…アクセルセンサ
93…ブレーキセンサ
94…後進入力センサ
95…駆動輪回転センサ
96…エンジン出力調整機構
611…太陽歯車
612…内歯車
613,614…ダブルピニオン
615…アーム
616…後進ブレーキ
【技術分野】
【0001】
本発明は、変速制御装置及び変速制御方法に関する。
【背景技術】
【0002】
従来、エンジンの駆動軸とモータの駆動軸との間に第1クラッチを設け、無段変速機と駆動輪との間に第2クラッチを設けたハイブリッド車用駆動装置が提案されている。このハイブリッド車用駆動装置は車両減速時に第1クラッチを切断する。これにより、エンジンブレーキを駆動輪に作用させることなく、モータによる回生ブレーキのみを作用させることができ、減速によるブレーキ回生によるエネルギーの回収を効率よく行うことができる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−23313号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載のハイブリッド車用駆動装置では、第1クラッチ解放後に直ぐにエンジン始動が要求される場合など、減速時に第1クラッチを締結した状態で維持した方が良い場合がある。このような場合、減速時に第1クラッチが切断されず締結されていることから、第1クラッチを介してモータとエンジンとが連結され、エンジンの損失トルクにより回生エネルギーが低減して回生効率が低下してしまう。
【0005】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、回生効率を向上させることが可能な変速制御装置及び変速制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の変速制御装置は、エンジンとモータとがクラッチを介して接続され、当該モータと駆動輪との間に変速機が配置されたハイブリッド車両の変速制御装置である。この変速制御装置は、車両減速時にクラッチを切断して回生する場合、変速機の伝達効率及びモータの発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御手段と、車両減速時に前記クラッチを締結して回生する場合、第1変速制御手段による変速制御の実行時より、変速機の変速比を小さくする変速制御を実行する第2変速制御手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、車両減速時にクラッチを切断して回生する場合、変速機の伝達効率及びモータの発電効率の少なくとも一方に基づいて変速制御を実行するため、変速機の伝達効率やモータの発電効率を適切とし、減速時の回生効率を高めることができる。また、車両減速時にクラッチを締結して回生する場合、上記変速制御の実行時より、変速機の変速比を小さくする変速制御を実行する。ここで、変速比を小さくするとエンジントルク損失を小さくできる。よって、クラッチが締結されてモータとエンジンとが接続状態であるときに、エンジントルク損失を小さくして、減速時の回生効率を高めることができる。従って、クラッチを締結状態で維持した場合においても回生効率を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】本実施形態に係る動作制御装置が搭載されるハイブリッド車両を示す概略構成図である。
【図2】本実施形態に係る動作制御装置を示すブロック図である。
【図3】モータの回転速度とモータトルクに対するモータの発電効率の関係を示す相関図である。
【図4】エンジンの回転速度とエンジントルク損失との関係を示す相関図である。
【図5】エンジン損失トルクによるブレーキトルク(エンブレトルク)(ドライブシャフト軸換算)と車速との関係を示す相関図であって、(a)は最High時における相関を示し、(b)はMid時における相関を示している。
【図6】無段変速機構の伝達効率と変速比との関係を示す相関図である。
【図7】本実施形態に係る変速制御方法を示すフローチャートである。
【図8】ハイブリッド車両の挙動に応じた各種データを示すグラフであって、(a)は車速〔km/h〕を示し、(b)は回生エネルギー〔kJ〕を示し、(c)は変速比を示し、(d)はモータ入力回転数〔rpm〕を示し、(e)はモータ入力トルク〔Nm〕を示している。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施形態を図面に基づいて説明する。図1は、本実施形態に係る動作制御装置が搭載されるハイブリッド車両を示す概略構成図である。図1に示すように、ハイブリッド車両は、エンジン2と、モータ3と、第1クラッチ(クラッチ)4と、無段変速機構(変速機)5と、伝達機構6と、第2クラッチ7と、駆動軸8と、駆動輪9L,9Rとを備えている。
【0010】
エンジン2は、ガソリン等の燃料によって駆動する内燃機関であって、駆動によって回転駆動する駆動軸21を備えている。また、駆動軸21はトルク吸収ダンパー22を備えている。トルク吸収ダンパー22は、エンジン2の一回転毎に生じるトルク変動を抑制する。なお、エンジン2は、内燃機関に限定されず、スターリング機関等の外燃機関であってもよい。
【0011】
モータ3は、電力供給により駆動する電動機であって、駆動によって回転駆動する駆動軸31を備えている。また、モータ3は、外部から駆動軸31に対して回転トルクを受けると、これに応じて発電を行う発電機としても機能する。モータ3の駆動軸31は、中空となっており、その内部には、エンジンの駆動軸21が同一の中心軸を通って遊挿されている。
【0012】
第1クラッチ4は、駆動軸21,31それぞれの同じ側の端部において、両者を締結及び切断するものである。また、モータ3の駆動軸31は、クラッチ4の断続動作とは無関係に、無段変速機構5と直結されている。すなわち、第1クラッチ4が締結されている場合、エンジン2及びモータ3の駆動軸21,31が無段変速機構5と接続され、第1クラッチ4が切断されている場合、モータ3の駆動軸31のみが無段変速機構5と接続されることとなる。第1クラッチ4は、外部からの操作により締結及び切断が切り替えられる。
【0013】
無段変速機構5は、いわゆるCVT(Continuously Variable Transmission)であって、入力軸51と出力軸52とを備え、入力軸51と出力軸52とにプーリ53,54を備えている。これらのプーリ53,54は、ベルト55によって連結され、同時に回転を行う。また、無段変速機構5は、オイルポンプ56を備えている。無段変速機構5は、オイルポンプ56からのオイル供給により、プーリ53,54に対するベルト受け面の幅を変えることができる。このため、ベルト55は、各プーリ53,54上での回転半径を自在に変えることができ、これにより、各プーリ53,54に連動する入力軸51及び出力軸52の回転数比(変速比)が自在に調節される。
【0014】
無段変速機構5は、出力軸52、伝達機構6、及び第2クラッチ7を介して2つの駆動輪9L,9Rに伝達される。伝達機構6は、ダブルピニオン式遊星歯車機構61と、歯車列62と、作動装置63とを備えている。
【0015】
ダブルピニオン式遊星歯車機構61は、太陽歯車611と、内歯車612と、ダブルピニオン613,614と、アーム615と、後進ブレーキ616とを備えている。太陽歯車611は、出力軸52を中心軸とする歯車であって、出力軸52の動きに連動する。内歯車612は、太陽歯車611と同一の中心軸上にある歯車である。
【0016】
ダブルピニオン613,614は、互いに噛み合う歯車である。また、ダブルピニオン613,614のうち一方は太陽歯車611とも噛み合い、他方は内歯車612とも噛み合っている。アーム615は、ダブルピニオン613,614を公転自在に保持するものである。このアーム615は、前述したダブルピニオン613,614を出力軸52を挟んで対称にもう一対保持している。さらに、このアーム615は第2クラッチ7を介して出力軸52に接続されている。また、後進ブレーキ616は、内歯車612の外側からその回転を規制するものである。
【0017】
このような構成であるため、第2クラッチ7が接続され、後進ブレーキ616により内歯車612が回転を規制されてないとする。この場合、太陽歯車611が回転すると、アーム615及び内歯車612も一体となって同じ方向に回転する。このため、出力軸52の回転は、そのまま下流側の歯車列62に伝達される。
【0018】
一方、第2クラッチ7が切断され、後進ブレーキ616により内歯車612が回転を規制されたとする。この場合、太陽歯車611が回転すると、当該太陽歯車611と内歯車612との間において、ダブルピニオン613,614は、太陽歯車611と逆方向に公転する。このため、出力軸52の回転とは逆方向の回転が、下流側の歯車列62に伝達される。
【0019】
歯車列62は、複数の歯車が噛み合った状態で配列されたものである。このため、歯車列62に伝達された回転は、当該歯車列62を構成する複数の歯車によって減速され、差動装置63に伝えられる。この差動装置63は、歯車列62から伝達されたトルクを各駆動輪9L,9Rに伝達しつつも、カーブの走行で生じる各駆動輪9L,9Rの回転数差を許容する。
【0020】
図2は、本実施形態に係る動作制御装置を示すブロック図である。なお、図2では、動作制御装置の接続関係を明確にするために各種構成についても図示している。図2に示すように、動作制御装置(変速制御装置)10は各種信号を入力して各部を制御する機能を有している。
【0021】
具体的に動作制御装置10は、アクセルセンサ92、ブレーキセンサ93、後進入力センサ94、駆動輪回転センサ95、及びエンジン出力調整機構96を備えている。アクセルセンサ92は、ハイブリッド車両の加速用アクセルペダルの踏み込み量を検出するセンサである(具体的には、直動変位量を検出するセンサ)。ブレーキセンサ93は、ハイブリッド車両の制動用のブレーキペダルの踏み込み量を検出するセンサである(アクセルセンサと同種のセンサ)。後進入力センサ94は、ハイブリッド車の操縦者が後進の操作を入力した場合にこれを検出するセンサ(具体的には、マイクロスイッチ等)である。駆動輪回転センサ95は、駆動輪9Lの回転軸に装備され、その回転数を検出するセンサである(具体的には、エンコーダ等)。エンジン出力調整機構96は、エンジンのスロットル回度を調整し、出力調整を行う機構である。動作制御装置10は、各センサ92〜95の
出力に基づいて、エンジン出力調整機構96の出力調整を行うこととなる。
【0022】
また、動作制御装置10は、バッテリー91を備えており、モータ3に電力を供給したりモータ3の発電により充電を行ったりする。
【0023】
ここで、ハイブリッド車両が減速する場合、第1クラッチ4を切断することによってエンジン2を切り離して駆動輪9L,9Rの回転をモータ3に伝えることができ、これにより、回生効率を高めることができる。
【0024】
ところが、第1クラッチ4を切断することなく回生を行った方がよい場合がある。例えば減速中に運転者が再加速を要求した場合に、再加速に必要なトルクがモータ3にて発生可能な最大トルクより大きいとする。この場合、モータ3のトルクだけでは再加速できなくなってしまうため、第1クラッチ4を切断することなく回生を行った方がよい。より詳細に、上記場合に第1クラッチ4を切断してしまうと、再加速要求後、第1クラッチ4を締結し、エンジン2を始動してエンジントルクを発生させる手順となってしまう。このため、エンジントルク発生までのタイムラグが大きくなり、運転者に違和感を与えてしまう。
【0025】
そこで、本実施形態において動作制御装置10は、クラッチ制御部(クラッチ制御手段)11と、第1変速制御部(第1変速制御手段)12と、第2変速制御部(第2変速制御手段)13とを備えている。
【0026】
クラッチ制御部11は、減速時にモータ3のみによって再加速できるか否かに基づいて、第1クラッチ4を切断して回生するか、第1クラッチ4を締結して回生するかを制御するものである。このクラッチ制御部11は、再加速に必要なトルクがモータ3にて発生可能な最大トルク以上であるか否かに基づいて、第1クラッチ4を切断して回生するか、第1クラッチ4を締結して回生するかを制御する。
【0027】
第1変速制御部12は、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行するものである。具体的に第1変速制御部12は、例えば無段変速機構5の伝達効率を考慮して、ロスが少なくなるように変速比を調整する。また、第1変速制御部12は、モータ3の発電効率を考慮し、発電効率が高くなるように変速比を調整する。
【0028】
図3は、モータ3の回転速度とモータトルクに対するモータ3の発電効率の関係を示す相関図である。図3において横軸を回転速度とし、縦軸をモータトルクとすると、モータ3の発電効率は、図3に示すように楕円に近い形状で示される。図中において1つの線(すなわち1つの楕円)は、発電効率の同じ値を示していて、内側に位置する線ほどモータ3の発電効率が高い。この相関図は、モータ3の固有の特性によって決まるものである。この相関図に相当するデータを用いることによって、第1変速制御部12は、モータ3の発電効率が高くなるようなモータ回転速度とモータトルクとのそれぞれの値をとるように、無段変速機構5の変速比を決定することができる。これにより、モータ3の発電効率を高めて減速時の回生効率を高めることができる。
【0029】
また、第1変速制御部12は、第1クラッチ4を切断して回生するにあたり、モータ3が許容可能なモータ許容トルク以下となるように変速比を調整する。モータ許容トルクを超えて回生トルクがモータ3にて回収できなくなってしまう事態を防止し、モータ3の発電効率を高めることとなる。
【0030】
さらに、第1変速制御部12は、車両減速が継続されてハイブリッド車両が停止すると
きに変速比が最も高くなるように、変速制御を実行する。このため、仮に減速が継続されてハイブリッド車両が停止してしまっても、その車両発進をスムーズに行うことができるからである。
【0031】
第2変速制御部13は、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部11による変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行するものである。ここで、変速比を小さくするとエンジントルク損失を小さくできる。よって、第1クラッチ4が締結されてモータ3とエンジン2とが接続状態であるときに、エンジントルク損失を小さくして、減速時の回生効率を高めることができる。
【0032】
図4は、エンジン2の回転速度とエンジントルク損失との関係を示す相関図である。図4に示すように、エンジン2の回転速度が低くなるほど、エンジン損失トルクは小さくなる傾向にある。このため、第2変速制御部13は、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部11による変速制御の実行時より無段変速機構5の変速比を小さくして(すなわちHigh側にして)、エンジンの回転速度を低くしてエンジン損失トルクを小さくする。これにより、回生効率を高めることとしている。
【0033】
図5は、エンジン損失トルクによるブレーキトルク(エンブレトルク)(ドライブシャフト軸換算)と車速との関係を示す相関図であって、(a)は最High時における相関を示し、(b)はMid時における相関を示している。まず、減速が継続されてハイブリッド車両が停止してしまっても、その車両発進をスムーズに行うために、最Lowまでの戻り性能が確保されていることが必要である。図5(a)及び図5(b)に、最Lowまで戻り可能な領域aを示す。図5(a)及び図5(b)に示すように、第1クラッチ4を締結した減速状態において、ギアが現在最Highであれば、車速がv2以上である場合に、最Lowまで戻り可能であるといえる。また、第1クラッチ4を締結した減速状態において、ギアが現在Midであれば、車速がv1以上である場合に、最Lowまで戻り可能であるといえる。
【0034】
また、ハイブリッド車両の乗り心地を考慮すると、許容できるエンブレトルクが存在する。すなわち、エンブレトルクが大きくなり過ぎると、エンジンブレーキが効きすぎて乗り心地が悪化してしまう。このため、エンブレトルクは、図5(a)及び図5(b)に示す許容エンブレトルク以下である必要がある。
【0035】
以上より、回収できる回生トルク(領域b参照)が決定する。ここで、図5(a)及び図5(b)に示すように、最High時における領域bの方がMid時における領域bよりも広くなっている。このため、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部11による変速制御の実行時より無段変速機構5の変速比を小さくすると、回生効率がよいといえる。
【0036】
図6は、無段変速機構5の伝達効率と変速比との関係を示す相関図である。第2変速制御部13は、無段変速機構5の伝達効率についても考慮して、無段変速機構5を制御することが望ましい。図6に示すように、無段変速機構5には変速比に応じて伝達ロスが異なる傾向がある。このため、第2変速制御部13は、変速比を小さくし過ぎて伝達効率が極度に悪化しない程度に、無段変速機構5をhigh側とすることが望ましい。第1変速制御部12において無段変速機構5の伝達効率に基づいて変速制御を実行する際にも、図5の相関図を用いて変速比を求める。
【0037】
次に、図7を参照して、本実施形態に係る変速制御方法を説明する。図7は、本実施形態に係る変速制御方法を示すフローチャートである。なお、図7に示すフローチャートは、ハイブリッド車両が減速中である限り、繰り返し実行される。
【0038】
図7に示すように、まずクラッチ制御部11は、現在の車速でモータ3のみによる0.05Gの再加速が可能か否かを判断する(S1)。現在の車速でモータ3のみによる0.05Gの再加速が可能であると判断した場合(S1:YES)、クラッチ制御部11は、第1クラッチ4を切断状態とする(S2)。
【0039】
その後、第1変速制御部12は、駆動輪9L,9R側からモータ3に入力されるモータ入力トルクがモータ許容トルク以下となる変速比を算出する(S3)。次いで、第1変速制御部12は、モータ許容トルク以下で、且つ、Low戻り性能を確保できる変速比領域を決定する(S4)。
【0040】
次に、第1変速制御部12は、無段変速機構5の伝達効率、及び、モータ3の発電効率を考慮し、ステップS4において決定された変速比領域内で最も回生効率が高いポイントを選出する(S5)。その後、第1変速制御部12は、回生効率が最も高いポイントから算出される変速比に決定し(S6)、変速制御を実行する(S7)。その後、図7に示す処理は終了する。
【0041】
一方、現在の車速でモータ3のみによる0.05Gの再加速が可能でないと判断した場合(S1:NO)、クラッチ制御部11は、第1クラッチ4を締結状態とする(S8)。次に、第2変速制御部13は、Low戻り性能を確保でき、エンジン損失トルク及び無段変速機構5の伝達効率を考慮して変速比を算出する(S9)。このとき、第2変速制御部13は、図5に示したようにLow戻り性能を確保できる領域aと、図4に示したようなエンジン損失トルクとエンジン回転速度との相関データと、図6に示したような変速比と伝達効率との相関データとから、変速比を算出する。
【0042】
その後、第2変速制御部13は、変速比を決定し(S6)、変速制御を実行する(S77)。そして、図7に示す処理は終了する。
【0043】
図8は、ハイブリッド車両の挙動に応じた各種データを示すグラフであって、(a)は車速〔km/h〕を示し、(b)は回生エネルギー〔kJ〕を示し、(c)は変速比を示し、(d)はモータ入力回転数〔rpm〕を示し、(e)はモータ入力トルク〔Nm〕を示している。なお、図8に示す各種データは、第1クラッチ4が切断されたときに第1変速制御部12による制御が実行されたときのデータを示している。
【0044】
まず、図8(a)に示すように、時刻45〔任意単位〕においてハイブリッド車両が加速を開始し、時刻60付近で車速が50km/hとなったとする。この間において車両は減速中でなく、図8(b)に示すように回生エネルギーは0kJである。また、図8(d)及び図8(e)に示すように、モータ3に入力される回転数及びモータ3に入力されるトルクは、それぞれ0rpm及び0Nmである。さらに、図8(b)に示すように、この間において車速が高くなるのに伴って変速比は小さくなっていく。
【0045】
そして、図8(a)に示すように、ハイブリッド車両は時刻73付近まで定速走行した後、時刻78付近まで減速する。このとき、クラッチ制御部11は、第1クラッチ4を切断状態とする。そして、Low戻り性能を確保するのみで制御を実行すると、図8(c)〜図8(e)に示すように、変速比は1未満となり、モータ入力回転数は1300rpmとなり、モータ入力トルクは55Nmとなる(図8(c)〜図8(e)の破線参照)。なお、図8(c)の一点鎖線に示す減速フラグは減速時に発生するフラグである。
【0046】
ところが、本実施形態のようにLow戻り性能のみでなく、モータ許容トルク及び無段変速機構5の伝達効率を考慮すると、図8(c)〜図8(e)の実線に示すようになる。
すなわち、モータ許容トルクが40Nmであるとすると、図8(c)の実線に示すように変速比が1.2程度とされる。この結果、図8(e)の実線に示すようにモータ入力トルクが40Nmとなる。なお、図8(d)の実線に示すように、変速比が1.2程度となるため、モータ入力回転数は1800rpmとなる。また、このときの回生エネルギーは図8(b)に示すように7.5kJである。さらに、図8(c)に示す二点鎖線はモータ入力トルクが40Nmとなる変速比である。
【0047】
次いで、時刻130付近まで加速及び定速走行が行われた後に、時刻140付近まで減速が行われたとする。この場合もモータ入力トルクはモータ許容トルクである40Nm以下に制御される。さらに、第1変速制御部12は、無段変速機構5の伝達効率についても考慮している。このため、変速比が0.8程度であればモータ入力トルクは40Nmとすることができるが、第1変速制御部12は、変速比が1である場合に最も伝達効率が高いとするならば(図8(c)の三点鎖線参照)、変速比を1に設定する。これにより、図8(e)の実線に示すようにモータ入力トルクが30Nmとなる。なお、図8(d)の実線に示すように、変速比が1.0程度となるため、モータ入力回転数は2200rpm付近となる。また、回生エネルギーは図8(b)に示すように7.5kJ付近となる。
【0048】
さらに、時刻170〜時刻200における減速についても同様に、第1変速制御部12は、Low戻り性能、モータ許容トルク、及び無段変速機構5の伝達効率に基づいて変速比が決定されることとなる。
【0049】
このようにして、本実施形態に係る動作制御装置10及び変速制御方法によれば、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行するため、無段変速機構5の伝達効率やモータ3の発電効率を適切とし、減速時の回生効率を高めることができる。また、車両減速時に第1クラッチ4を締結して回生する場合、上記変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行する。ここで、変速比を小さくするとエンジントルク損失を小さくできる。よって、第1クラッチ4が締結されてモータ3とエンジン2とが接続状態であるときに、エンジントルク損失を小さくして、減速時の回生効率を高めることができる。従って、第1クラッチ4を締結状態で維持した場合においても回生効率を向上させることができる。
【0050】
また、第1クラッチ4を切断して回生するにあたり、モータ3が許容可能なモータ許容トルク以下となるように変速制御を実行するため、モータ許容トルクを超えて回生トルクがモータ3にて回収できなくなってしまう事態を防止することができる。さらに、車両減速が継続されてハイブリッド車両が停止するときに変速比が最も高くなるように変速制御を実行するため、仮にハイブリッド車両が停止してしまっても、その車両発進をスムーズに行うことができる。
【0051】
また、減速時にモータ3のみによって再加速できるか否かに基づいて、第1クラッチ4を切断して回生するか、第1クラッチ4を締結して回生するかを制御する。ここで、減速時にモータ3のみによって再加速できない場合、エンジン2を利用して再加速する必要がある。一方、減速時にモータ3のみによって再加速できる場合、エンジン2を利用する必要がない。よって、上記のように制御することで、回生効率を向上させつつも加速性能を保持することができる。
【0052】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものでは無く、本発明の趣旨を逸脱しない範囲で、変更を加えてもよい。
【0053】
例えば、上記実施形態において、ハイブリッド車両は無段変速機構5を備えているが、
これに限らず、無段変速機構5でなくともよい。また、ハイブリッド車両は第2クラッチ7を備えているが、第2クラッチ7を備えてなくともよい。
【符号の説明】
【0054】
1…ハイブリッド車両
2…エンジン
3…モータ
4…第1クラッチ(クラッチ)
5…無段変速機構(変速機)
6…伝達機構
7…第2クラッチ
8…駆動軸
9L,9R…駆動輪
10…動作制御装置(変速制御装置)
11…クラッチ制御部(クラッチ制御手段)
12…第1変速制御部(第1変速制御手段)
13…第2変速制御部(第2変速制御手段)
21…駆動軸
22…トルク吸収ダンパー
31…駆動軸
51…入力軸
52…出力軸
53,54…プーリ
55…ベルト
56…オイルポンプ
61…ダブルピニオン式遊星歯車機構
62…歯車列
63…作動装置
91…バッテリー
92…アクセルセンサ
93…ブレーキセンサ
94…後進入力センサ
95…駆動輪回転センサ
96…エンジン出力調整機構
611…太陽歯車
612…内歯車
613,614…ダブルピニオン
615…アーム
616…後進ブレーキ
【特許請求の範囲】
【請求項1】
エンジンとモータとがクラッチを介して接続され、当該モータと駆動輪との間に変速機が配置されたハイブリッド車両の変速制御装置であって、
車両減速時に前記クラッチを切断して回生する場合、前記変速機の伝達効率及び前記モータの発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御手段と、
車両減速時に前記クラッチを締結して回生する場合、前記第1変速制御手段による変速制御の実行時より、前記変速機の変速比を小さくする変速制御を実行する第2変速制御手段と、
を備えることを特徴とする変速制御装置。
【請求項2】
前記第1変速制御手段は、前記クラッチを切断して回生するにあたり、前記モータが許容可能なモータ許容トルク以下となるように、且つ、車両減速が継続されて前記ハイブリッド車両が停止するときに変速比が最も高くなるように、変速制御を実行する
ことを特徴とする請求項1に記載の変速制御装置。
【請求項3】
減速時にモータのみによって再加速できるか否かに基づいて、前記クラッチを切断して回生するか、前記クラッチを締結して回生するかを制御するクラッチ制御手段をさらに備える
ことを特徴とする請求項1又は請求項2のいずれかに記載の変速制御装置。
【請求項4】
エンジンとモータとがクラッチを介して接続され、当該モータと駆動輪との間に変速機が配置されたハイブリッド車両の変速制御方法であって、
車両減速時に前記クラッチを切断して回生する場合、前記変速機の伝達効率及び前記モータの発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御工程と、
車両減速時に前記クラッチを締結して回生する場合、前記第1変速制御工程における変速制御の実行時より、前記変速機の変速比を小さくする変速制御を実行する第2変速制御工程と、
を有することを特徴とする変速制御方法。
【請求項1】
エンジンとモータとがクラッチを介して接続され、当該モータと駆動輪との間に変速機が配置されたハイブリッド車両の変速制御装置であって、
車両減速時に前記クラッチを切断して回生する場合、前記変速機の伝達効率及び前記モータの発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御手段と、
車両減速時に前記クラッチを締結して回生する場合、前記第1変速制御手段による変速制御の実行時より、前記変速機の変速比を小さくする変速制御を実行する第2変速制御手段と、
を備えることを特徴とする変速制御装置。
【請求項2】
前記第1変速制御手段は、前記クラッチを切断して回生するにあたり、前記モータが許容可能なモータ許容トルク以下となるように、且つ、車両減速が継続されて前記ハイブリッド車両が停止するときに変速比が最も高くなるように、変速制御を実行する
ことを特徴とする請求項1に記載の変速制御装置。
【請求項3】
減速時にモータのみによって再加速できるか否かに基づいて、前記クラッチを切断して回生するか、前記クラッチを締結して回生するかを制御するクラッチ制御手段をさらに備える
ことを特徴とする請求項1又は請求項2のいずれかに記載の変速制御装置。
【請求項4】
エンジンとモータとがクラッチを介して接続され、当該モータと駆動輪との間に変速機が配置されたハイブリッド車両の変速制御方法であって、
車両減速時に前記クラッチを切断して回生する場合、前記変速機の伝達効率及び前記モータの発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御工程と、
車両減速時に前記クラッチを締結して回生する場合、前記第1変速制御工程における変速制御の実行時より、前記変速機の変速比を小さくする変速制御を実行する第2変速制御工程と、
を有することを特徴とする変速制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−224321(P2012−224321A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−136848(P2011−136848)
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]