
変速機の評価方法及び評価装置
【課題】 判定精度を高めることができる変速機の評価方法を提供する。
【解決手段】 正常状態の変速機の運転時に発生する複数の波形を、参照波形として取得し、取得された参照波形の少なくとも1つの特徴量に基づいて、複数の参照波形を複数のクラスタに分類する。評価対象の変速機を運転し、評価対象の変速機から発生する評価波形を取得する。複数のクラスタから、評価波形と最も類似度の高いクラスタを抽出する。抽出されたクラスタに属する参照波形と、評価波形とに基づいて、評価波形の良否を判定する。
【解決手段】 正常状態の変速機の運転時に発生する複数の波形を、参照波形として取得し、取得された参照波形の少なくとも1つの特徴量に基づいて、複数の参照波形を複数のクラスタに分類する。評価対象の変速機を運転し、評価対象の変速機から発生する評価波形を取得する。複数のクラスタから、評価波形と最も類似度の高いクラスタを抽出する。抽出されたクラスタに属する参照波形と、評価波形とに基づいて、評価波形の良否を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変速機からの時間変動情報に基づいて、変速機の評価を行う方法及び評価装置に関する。
【背景技術】
【0002】
遊星歯車機構の各部の回転動作に基づいて発生した振動を検出し、検出された振動に基づいて、遊星歯車機構の損傷の有無を診断する技術が公知である(特許文献1)。保全状態が良好な遊星歯車機構から発生する振動と、診断対象の遊星歯車機構から発生した振動との特定周波数の検出信号を比較することにより、損傷の種類及び部位が特定される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−43257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
変速機が設置されている環境には、測定対象物以外の場所で発生した振動等の外乱が含まれる。この外乱によって、正常な製品を異常と判定してしまう場合がある。また、変速機では、相互に噛み合う歯車の数が多いため、各部品の寸法誤差が公差内である場合でも、微妙な噛み合わせタイミングのずれ等により、振動波形の形状が異なってしまう。また、継続的に使用していると、摩耗や潤滑不良等によっても、振動波形の形状に経時変化が生じる。このように、個体ごとに、または継続使用によって発生した不良の状況に応じて振動波形に異なる特徴(癖)が現れる。これらの癖を考慮しないで、一律に良否を判定すると、正常な製品を異常と判定してしまう場合がある。また、異常な製品を正常と判定してしまう場合もある。
【0005】
本発明の目的は、判定精度を高めることができる変速機の評価方法を提供することである。本発明の他の目的は、判定精度を高めることができる変速機の評価装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一観点によると、
正常状態の変速機の各々の運転時に発生する複数の波形を、参照波形として取得し、取得された前記参照波形の少なくとも1つの特徴量に基づいて、前記複数の参照波形を複数のクラスタに分類する工程と、
評価対象の変速機を運転し、評価対象の変速機から発生する評価波形を取得する工程と、
前記複数のクラスタから、前記評価波形と最も類似度の高いクラスタを抽出する工程と、
抽出された前記クラスタに属する前記参照波形と、前記評価波形とに基づいて、前記評価波形の良否を判定する工程と
を有する変速機の評価方法が提供される。
【0007】
本発明の他の観点によると、
変速機からの時間変動情報を検知するセンサと、
複数の参照波形を複数のクラスタに分類したときの各クラスタの特徴量、及び評価波形の特徴量が記憶される記憶装置と、
演算装置と、
前記演算装置の演算結果を出力する出力装置と
を有し、
前記演算装置は、
前記センサで検知された変速機からの時間変動情報を評価波形として、該評価波形の特徴量を算出し、
算出された前記評価波形の特徴量を前記記憶装置に記憶させ、
前記評価波形の特徴量、及び前記記憶装置に記憶されている前記クラスタの特徴量に基づいて、前記評価波形と最も類似度の高いクラスタを抽出し、
抽出された前記クラスタの特徴量と、前記評価波形の特徴量とに基づいて、前記評価波形の良否を判定し、
判定結果を前記出力装置に出力する変速機の評価装置が提供される。
【発明の効果】
【0008】
評価波形に類似するクラスタを基準として、評価波形の良否を判定することにより、判定の精度を高めることができる。
【図面の簡単な説明】
【0009】
【図1】変速機の断面図である。
【図2】変速機の、軸方向に直交する断面図である。
【図3】実施例1による変速機の評価装置のブロック図である。
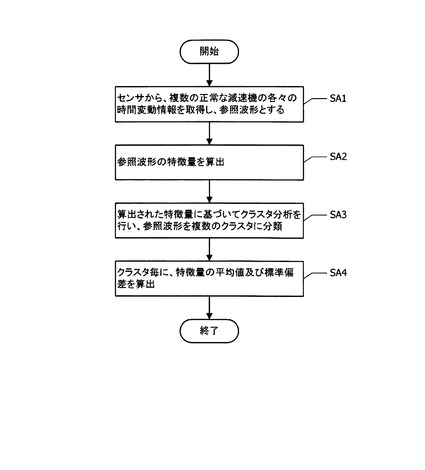
【図4】実施例1による変速機の評価方法の準備段階のフローチャートである。
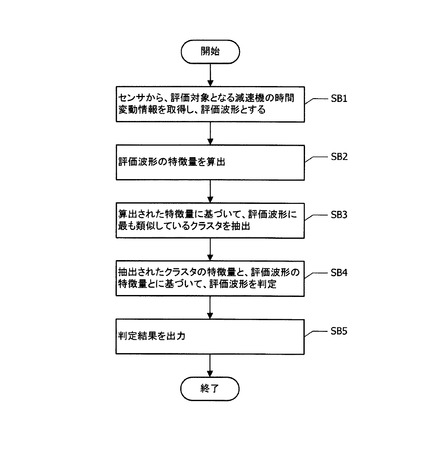
【図5】実施例1による変速機の評価方法の評価段階のフローチャートである。
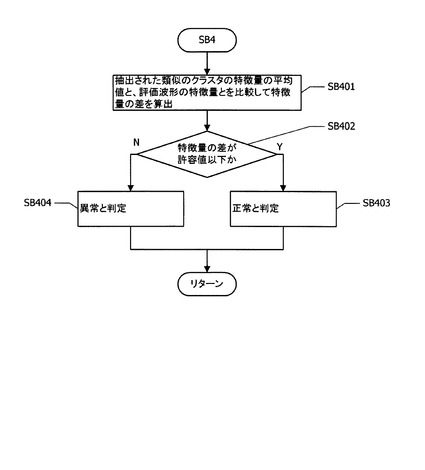
【図6】実施例1による変速機の評価方法のステップSB4の詳細なフローチャートである。
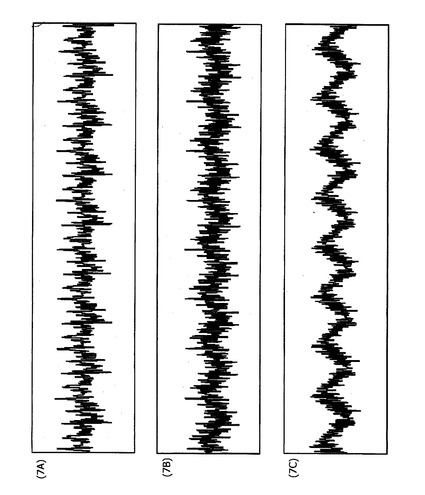
【図7】(7A)〜(7C)は、実施例1による変速機の評価方法で取得された参照波形の例を示す図である。
【図8】実施例1による変速機の評価方法で算出された参照波形の特徴量の例を示す図表である。
【図9】実施例1による変速機の評価方法で算出される特徴量の定義を説明するための波形の一例を示す図である。
【図10】実施例1による変速機の評価方法で適用された階層的クラスタ分析により得られたデンドログラムの一例を示す図である。
【図11】実施例1による変速機の評価方法で算出されたクラスタ毎の特徴量の平均値及び標準偏差を示す図表である。
【図12】実施例2による変速機の評価方法のステップSB4の詳細なフローチャートである。
【図13】マハラノビス距離を計算するための計算式を示す図である。
【図14】実施例2による変速機の評価方法で寄与度を算出ために用いる直交表の例を示す図表である。
【発明を実施するための形態】
【0010】
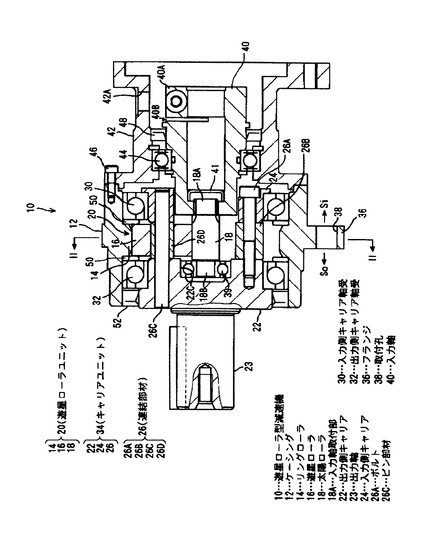
図1に、評価対象である変速機10の断面図の一例を示す。図2に、図1のII−II線に沿う断面図を示す。以下、変速機10を減速機として使用する場合を例に説明するが、この変速機の入力軸及び出力軸を、それぞれ出力軸及び入力軸として動作させると、この変速機は増速機として機能する。
【0011】
ケーシング12に、リングローラ14が一体で形成されている。リングローラ14、遊星ローラ16、太陽ローラ18により、遊星ローラユニット20が構成されている。遊星ローラユニット20の出力側Soに、出力側キャリア22が配置され、入力側Siに、入力側キャリア24が配置されている。複数の連結部材26が、遊星ローラユニット20を軸方向に貫通し、入力側キャリア24と出力側キャリア22とを相互に連結する。出力側キャリア22、入力側キャリア24、及び連結部材26が、キャリアユニット34を構成する。
【0012】
入力側キャリア軸受け30が、ケーシング12に対して入力側キャリア24を、回転可能に支持する。出力側キャリア軸受け32が、ケーシング12に対して出力側キャリア22を回転可能に支持する。キャリアユニット34は、ケーシング12に対して回転可能に、両持ち状態で支持されている。
【0013】
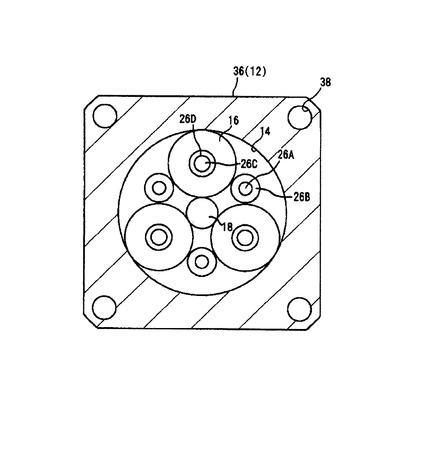
ケーシング12は、筒状体であり、リングローラ14は、軸方向中央近傍の内周部に形成されている。ケーシング12の外周部に、フランジ36が形成されている。フランジ36は、軸方向に関してリングローラ14と同じ位置に配置される。フランジ36に、外部部材に取り付けるための貫通孔38が形成されている。
【0014】
太陽ローラ18に、入力側Siに向けて突出する入力軸取付部18Aが設けられている。入力軸取付部18Aの外周に、入力軸40に嵌合する軸方向のスプラインが形成されている。また、太陽ローラ18に、出力側Soに向かって突出した突起18Bが設けられている。突起18Bは、軸受け39を介して出力側キャリア22に回転可能に支持されている。太陽ローラ18は、軸受け39及び入力軸40により、軸方向の移動が規制されている。
【0015】
入力軸40は、中空構造で、一方の端部の内周に、軸方向のスプラインが形成されている。スプラインが形成されている端部が、太陽ローラ18の入力軸取付部18Aに嵌合している。入力軸40の中空部分に、入力軸取付部18Aとの嵌合部分を塞ぐ内蓋41が嵌め込まれている。内蓋41は、遊星ローラユニット20で使用される潤滑油がスプライン嵌合部から漏出することを防止する。
【0016】
入力軸40の他端には、モータ軸等に摩擦によって結合する摩擦結合部40Aが形成されている。摩擦結合部40Aと他の部分との間に、軸方向と垂直な方向(周方向)に沿うスリット40Bが形成されている。また、摩擦結合部40Aには、その周方向の一部に、軸方向に沿うスリットが形成されている。スリットを跨ぐボルトの締結力により、摩擦結合部40Aの内径が小さくなる。これにより、摩擦結合部40Aとモータ軸等とを、摩擦力で結合させることができる。
【0017】
入力軸40は、筒状の入力軸ケーシング42内に収容され、軸受け44を介して入力軸ケーシング42に回転可能に支持されている。入力軸40と入力軸ケーシング42との間に、オイルシール48が配置されている。オイルシール48は、軸方向に関して、軸受け44よりも入力側Siに配置されている。
【0018】
入力軸ケーシング42は、ボルト46でケーシング12に結合されている。また、入力軸ケーシング42には、摩擦結合部40Aの内径を縮小させるボルトを着脱するための作業孔42Aが形成されている。
【0019】
遊星ローラ16及びリングローラ14の、軸方向両側に、リング板状の一対の仕切板50が設置されている。遊星ローラ16の軸方向の寸法が、リングローラ14の軸方向の寸法より僅かに小さい。これにより、遊星ローラ16は、一対の仕切板50の間で滑らかに回転することができる。
【0020】
連結部材26は、ボルト26A、カラー26B、ピン部材26C、及びスリーブ26Dを含む。ボルト26Aは、入力側キャリア24を貫通し、複数の遊星ローラ16の間を通って出力側キャリア22に螺合している。カラー26Bは、ボルト26Aの外周に嵌合し、入力側キャリア24及び出力側キャリア22に挟まれて、両者の位置決めを行っている。
【0021】
ピン部材26Cは、入力側キャリア24及び出力側キャリア22に嵌め込まれるとともに、遊星ローラ16を貫通している。スリーブ26Dは、遊星ローラ16の内周とピン部材26Cとの間に嵌め込まれており、両者を滑らかに回転させる。遊星ローラ16の軸方向の寸法は、カラー26B、スリーブ26Dの軸方向の寸法より僅かに小さい。これにより、遊星ローラ16は、入力側キャリア24と出力側キャリア22との間で滑らかに回転することができる。
【0022】
出力側キャリア22に、出力側Soに向かって突出する出力軸23が一体に形成されている。出力側キャリア22の外周は、遊星ローラユニット20側の外径が若干小さい段付き形状を有する。小径部に、出力側キャリア軸受け32の内輪が嵌合している。なお、出力側キャリア22の大径部と小径部との間の段差面は、出力側キャリア軸受け32の軸方向の端面に接触している。
【0023】
出力側キャリア22の大径部とケーシング12との間に、オイルシール52が設置されている。また、出力側キャリア22の入力側Siを向く表面に、軸受け39を保持するための凹部22Cが形成されている。
【0024】
入力側キャリア24は、リング状であり、その外周面は、入力側Siの端部が他の部分よりも大きな外径にされた段差形状を有する。この段差面が、入力側キャリア軸受け30の内輪の軸方向の端面に接触している。
【0025】
入力側キャリア軸受け30及び出力側キャリア軸受け32の外径は、リングローラ14の内径よりも大きい。入力側キャリア軸受け30及び出力側キャリア軸受け32には、アンギュラ玉軸受けが用いられる。入力側キャリア軸受け30及び出力側キャリア軸受け32は、入力側キャリア24及び出力側キャリア22に挟まれて、与圧が付与されている。
【0026】
次に、変速機10の作用について説明する。入力軸40が回転すると、これに固定されている太陽ローラ18が、例えば時計方向に回転する。遊星ローラ16は、反時計方向に自転するとともに、時計方向に公転する。遊星ローラ16の公転の回転数は、太陽ローラ18の回転数に対して減速される。遊星ローラ16の公転運動が、ピン部材26Cを介して出力側キャリア22及び出力軸23に伝達される。
【0027】
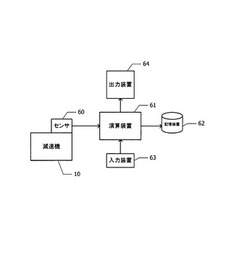
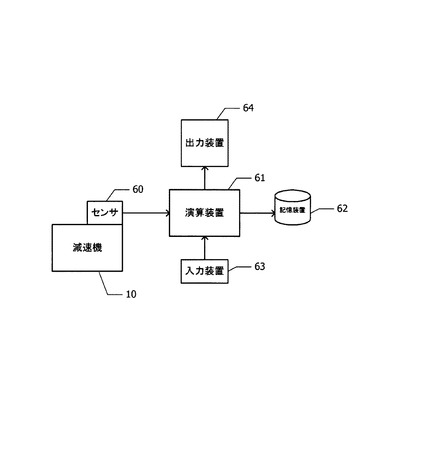
図3に、実施例1による変速機の評価装置のブロック図を示す。変速機10にセンサ60が取り付けられている。センサ60には、例えば加速度センサが用いられる。センサ60は、変速機10から発生する振動を電気信号に変換し、演算装置61に送出する。なお、センサ60で、振動以外の時間変動情報、例えば、音波、トルク変動等の物理量を検知してもよい。音波を検知する場合には、センサ60に集音マイクを用いればよい。トルク変動を検知する場合には、例えば、変速機10の入力軸を駆動する電気モータの駆動電流を測定すればよい。
【0028】
演算装置61は、センサ60から入力された時間変動情報に基づいて、種々の演算を行う。記憶装置62は、演算装置の演算過程で用いられる種々のデータを記憶する。出力装置64は、演算結果を出力する。入力装置63を通して、オペレータが演算装置61に指示を与える。
【0029】
図4に、実施例1による変速機の評価方法の準備段階のフローチャートを示す。以下の説明では、センサ60で検知される時間変動情報が、振動波形である場合について説明するが、以下に説明する方法は、時間変動情報が音波やトルク変動である場合にも適用することができる。
【0030】
ステップSA1において、複数の正常な変速機10の各々の運転時の振動を、センサ60で検知し、時間変動情報(波形)を取得する。この波形は、演算装置61に入力される。
【0031】
図7A〜図7Cに、3個の変速機10の各々から取得された波形の例を示す。例えば、1つの変速機10から5秒間の波形を取得する。この波形から、最初の200msの部分を切り出す。切り出された時間幅200msの波形を、「参照波形」ということとする。なお、参照波形の時間幅は、必ずしも200msである必要はない。演算装置61は、得られた参照波形を、記憶装置62に記憶させる。
【0032】
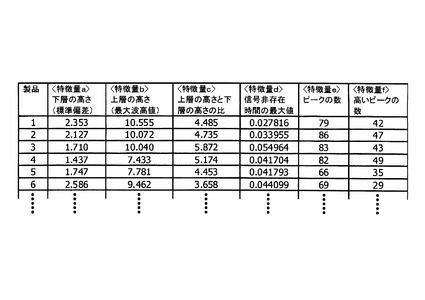
図4のステップSA2において、各参照波形の特徴量を算出する。特徴量とは、波形の形状を特徴付ける種々の物理量を意味する。本実施例1においては、特徴量a〜特徴量fの6種類の量を算出した。
【0033】
特徴量aとして、波形の標準偏差を採用し、特徴量bとして、波形の最大波高値を採用した。特徴量aは、比較的振幅の小さな領域で振動している波形の平均的な振幅に対応する。このため、特徴量aは、波形の「下層の高さ」ということができる。特徴量bは、大きな振幅を持つピークのうち、最も高いピークの振幅に相当する。このため、特徴量bは、波形の「上層の高さ(最大波高値)」ということができる。なお、上層の高さを算出する際に、ピークの高さが高いものから順番に、数個のピークを除外して、上層の高さを算出してもよい。これは、極稀に現れる外れ値の影響を排除するためである。
【0034】
特徴量cとして、上層の高さと下層の高さとの比を採用した。特徴量dとして、信号非存在時間の最大値を採用した。特徴量e及び特徴量fとして、それぞれピークの数、及び高いピークの数を採用した。
【0035】
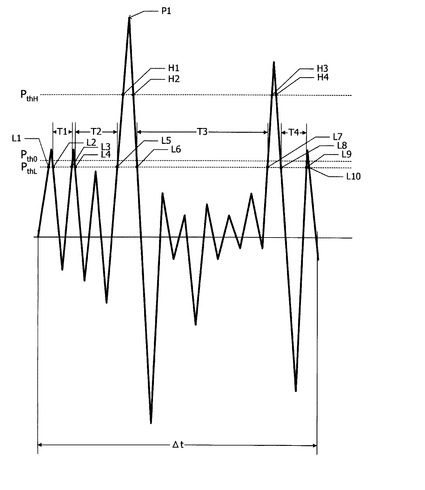
図9を参照して、測定時間(Δt)における「信号非存在時間の最大値」、「ピークの数」、及び「高いピークの数」について説明する。図9に波形の一例を示す。
【0036】
波形の高さが閾値Pth0よりも低い区間T1〜T4を、「信号非存在区間」ということとする。「信号非存在時間の最大値」は、信号非存在区間の各々の時間幅の最大値を意味する。図9に示した波形においては、信号非存在区間T3の時間幅が最も長いため、「信号非存在時間の最大値」として信号非存在区間T3の時間幅が採用される。一般的に、波形に周期の長いうねりがあると、「信号非存在時間の最大値」が大きくなる。測定時間Δtの間で最も高いピークP1の高さ(振幅)を「最大波高値」という。なお、極稀に現れる外れ値を除外するために、ピークの高さが最も高いものから順番にN個のピークを除外する場合には、測定時間Δtの間で、高さがN+1番目のピークの高さを「最大波高値」という。
【0037】
「ピークの数」は、波形が閾値PthLを横切る箇所の数と定義される。図9においては、交差箇所L1〜L10で、波形が閾値PthLを横切っている。この場合には、ピークの数は10になる。「高いピークの数」は、波形が、閾値PthLよりも高い閾値PthHを横切る箇所の数と定義される。図9においては、交差箇所H1〜H4で、波形が閾値PthHを横切っている。この場合には、高いピークの数は4になる。なお、ピークの数、及び高いピークの数として、波形が閾値を下から上に横切った箇所の数、または波形が閾値を上から下に横切った箇所の数と定義してもよい。
【0038】
図8に、正常な変速機の製品(個体)ごとに算出された特徴量a〜特徴量fの一例を示す。例えば、製品番号1の変速機の特徴量a〜特徴量fは、それぞれ2.353、10.555、4.485、0.027816、79、及び42である。
【0039】
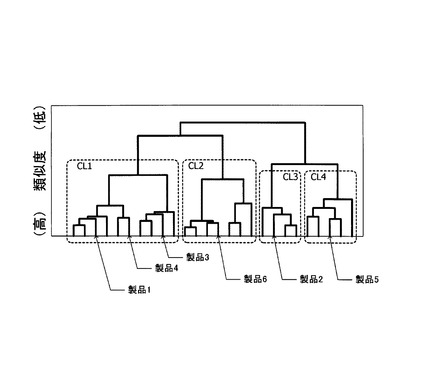
図4に戻って説明を続ける。ステップSA3において、ステップSA2で算出された特徴量に基づいてクラスタ分析を行い、参照波形を複数のクラスタに分類する。一例として、階層的クラスタ分析手法が適用される。相互に類似度の高い参照波形が、同一のクラスタに属することになる。
【0040】
図10に、階層的クラスタ分析手法を適用して得られたデンドログラム(樹状図)の一例を示す。図10に示した例では、複数の参照波形が、4つのクラスタCL1〜CL4に分類される。図10に示した例では、製品1、3、4から取得された参照波形がクラスタCL1に分類され、製品6から取得された参照波形がクラスタCL2に分類され、製品2から取得された参照波形がクラスタCL3に分類され、製品5から取得された参照波形がクラスタCL4に分類される。
【0041】
例えば、クラスタCL2に属する参照波形は、パワーが強い、または衝撃が多いという類似点を有する。クラスタCL3に属する参照波形は、低周波成分が強いという類似点を有する。クラスタCL4に属する参照波形は、上層の高さが相対的に高いという類似点を有する。クラスタCL1には、他のクラスタに属しない参照波形が属し、これらの参照波形は、特に目立った特徴を持たない。
【0042】
図7Aの波形は、特に目立った特徴を持たない。図7Bの波形は、ピークの数、及び高いピークの数が多いという特徴を有する。図7Cの波形は、信号非存在時間の最大値が長いという特徴を有する。
【0043】
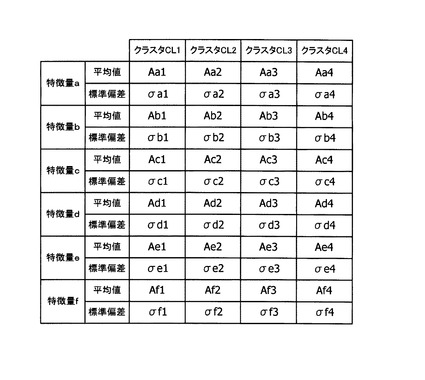
図4に戻って説明を続ける。ステップSA4において、クラスタ毎に、特徴量a〜特徴量fの各々について、平均値及び標準偏差を算出する。
【0044】
図11に、クラスタ毎に算出された特徴量の平均値及び標準偏差の一例を示す。例えば、クラスタCL1に属する複数の参照波形の特徴量aの平均値がAa1と算出され、特徴量aの標準偏差がσa1と算出される。算出された特徴量a〜特徴量fの各々の平均値及び標準偏差が、記憶装置62(図3)に記憶される。本明細書において、クラスタに属する複数の参照波形の特徴量の平均値を、単に「クラスタの特徴量」という場合がある。
【0045】
図5に、実施例1による変速機の評価方法の評価段階のフローチャートを示す。評価段階は、図11に示したクラスタ毎の特徴量の平均値及び標準偏差が準備された後に実行される。
【0046】
ステップSB1において、評価対象となる変速機10を運転させながら、センサ60(図3)で振動を検知し、波形を取得する。図4のステップSA4と同様に、取得された波形から、時間幅200msの部分を切り出し、評価波形とする。この時間幅は、ステップSA4で取得された参照波形の時間幅と同一とする。
【0047】
ステップSB2において、評価波形の特徴量a〜特徴量fを算出する。ステップSB3において、ステップSB2で算出された特徴量に基づいて、評価波形に最も類似しているクラスタを抽出する。類似するクラスタの抽出には、例えば最小二乗法を適用することができる。具体的には、クラスタ毎に、評価波形の特徴量と、クラスタの特徴量との差の二乗和を求める。この二乗和が最小になるクラスタが、最も類似するクラスタとして抽出される。
【0048】
ステップSB4において、抽出された類似のクラスタの特徴量と、評価波形の特徴量とに基づいて、評価波形の良否を判定する。
【0049】
図6に、ステップSB4の詳細なフローチャートを示す。ステップSB401において、類似のクラスタの特徴量と、評価波形の特徴量との差を、特徴量ごとに算出する。ステップSB402において、特徴量の差が予め定められた許容値以下か否かを判定する。この判定は、特徴量ごとに行われる。また、許容値も、特徴量ごとに予め設定されている。すべての特徴量について、特徴量の差が許容値以下であれば、ステップSB403において、評価波形を正常と判定する。
【0050】
少なくとも1つの特徴量において、類似するクラスタの特徴量と評価波形の特徴量との差が許容値を超える場合には、ステップSB404において、評価波形を異常と判定する。
【0051】
ステップSB403またはSB404の後、ステップSB5(図5)において、判定結果を出力装置64(図1)に出力する。
【0052】
実施例1による方法では、良否の判定が、評価波形が類似するクラスタの特徴量を参照して行われ、他のクラスタの特徴量の影響を受けない。例えば、変速機には、組み立て作業者、組み立て環境や設置環境等に依存する製品(個体)ごとの特徴が存在する。例えば、平均的な個体に比べて低周波振動が強いが、正常に動作するもの、平均的な個体に比べて衝撃が多いが、正常に動作するもの等が存在する。このように、ある特徴を持つ個体は、類似する特徴を持つ他の正常な個体を基準として、良否の判定を行う。これにより、判定の精度を高めることができる。
【0053】
実施例1では、良否判定のための基準となる参照波形を、予めクラスタに分類しておき、評価波形に類似するクラスタを参照して良否の判定を行うため、判定の精度を高めることができる。
【0054】
上記実施例1では、ステップSA2(図4)及びステップSB2(図5)で、複数(6個)の特徴量を算出したが、算出する特徴量の数は6個に限定されない。例えば、1個の特徴量を算出してもよいし、2個〜5個の特徴量を算出してもよいし、7個以上の特徴量を算出してもよい。
【0055】
また、ステップSA3(図4)においてクラスタ分析で用いる特徴量と、ステップSB401(図6)において、良否判定に用いる特徴量とは、同一でなくてもよい。例えば、ステップSA3において、特徴量a〜特徴量dを用いてクラスタ分析を行い、ステップSB401において、特徴量a、特徴量e〜特徴量fを用いて特徴量の差を算出してもよい。
【0056】
各クラスタに属する参照波形に対応する正常な変速機において、長期の運転中に異常が発生する場合がある。これらの異常発生状況を集計すると、クラスタ毎にどのような異常が発生し易いか特徴付けることができる場合がある。
【0057】
ステップSB402(図6)で異常と判定された場合、評価波形が類似するクラスタに基づいて、異常発生箇所を推定することが可能である。例えば、図7Cに示したように、信号非存在時間の最大値が長い特徴を有するクラスタに分類された波形が観測された場合には、ピン部材26c(図1、図2)に偏心が生じていると推定することができる。
【0058】
次に、図12〜図14を参照して、実施例2について説明する。以下、実施例1との相違点に着目して説明し、同一の構成については説明を省略する。
【0059】
実施例2による変速機の評価装置のブロック図は、図3に示した実施例1のものと同一である。また、実施例2による変速機の評価方法も、実施例1の図4のフローチャートと同一の準備段階を含む。実施例2の評価段階は、実施例1の説明で参照した図5のフローチャートと同一である。ただし、ステップSB4の具体的な処理が、実施例1の処理と異なる。
【0060】
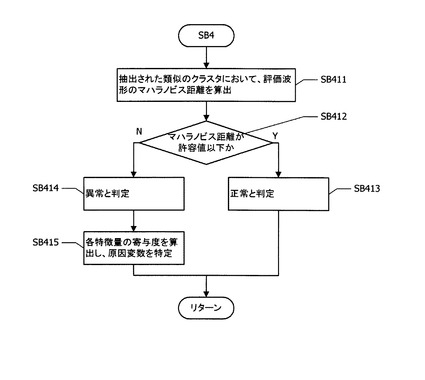
図12に、実施例2のステップSB4の詳細なフローチャートを示す。ステップSB411で、評価波形に類似するクラスタにおいて、評価波形のマハラノビス距離を算出する。
【0061】
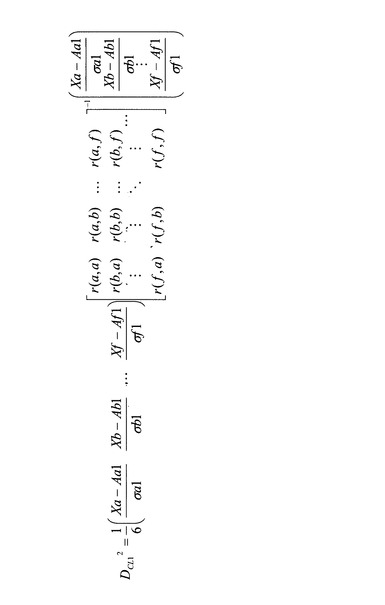
図13に、クラスタCL1における評価波形のマハラノビス距離DCL12の定義式を示す。図13に示した定義式において、Xa〜Xfは、それぞれ評価波形の特徴量a〜特徴量fの値である。Aa1〜Af1及びσa1〜σf1は、図11に示したクラスタCL1の特徴量の平均値及び標準偏差である。r(a,a)〜r(f,f)を含む行列は、クラスタCL1の特徴量a〜特徴量fの相関行列である。他のクラスタにおいても、同様に、マハラノビス距離を算出することができる。
【0062】
この相関行列は、ステップSA4(図4)で、クラスタ毎の特徴量の平均値及び標準偏差が確定すると、算出可能であり、評価波形には依存しない。すなわち、評価対象のいずれの変速機の評価段階においても、相関行列は共通に使用することが可能である。従って、ステップSA4で、予め相関行列を算出しておくことが好ましい。この相関行列は、図11に示したクラスタ毎の特徴量の平均値及び標準偏差と共に、記憶装置62(図3)に記憶される。相関行列が記憶装置62に記憶されている場合には、変速機の評価ごとに繰返し実行されるステップSB411において、相関行列を算出する必要はない。
【0063】
評価波形と、クラスタCL1に属する参照波形との類似度が高いほど、クラスタCL1における評価波形のマハラノビス距離DCL12が短くなる。
【0064】
ステップSB412において、ステップSB411で算出されたマハラノビス距離が許容値以下か否かを判定する。マハラノビス距離が、予め定められた許容値以下であるということは、評価波形と、正常な変速機から取得された参照波形との類似度が高いことを意味する。このため、マハラノビス距離が許容値以下である場合、ステップSB413において、評価波形を正常と判定する。この許容値は、予め経験的に決定しておくことができる。
【0065】
マハラノビス距離が許容値を超えている場合には、ステップSB414において評価波形を異常と判定する。異常と判定された場合には、ステップSB415において、各特徴量の寄与度を算出し、異常と判定された原因となる特徴量(原因変数)を特定する。以下、寄与度の算出方法について説明する。
【0066】
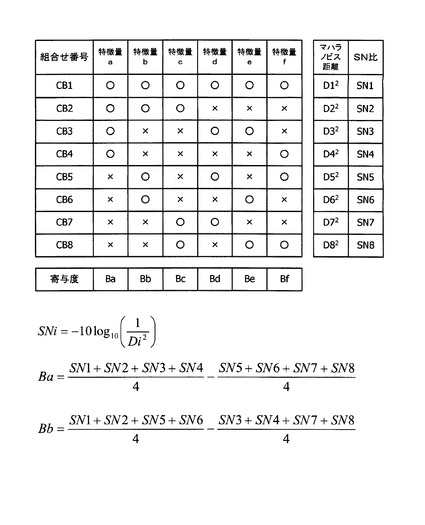
図14に、寄与度の算出に用いる直交表の一例を示す。図14に示した直交表は、特徴量の数が6個の場合の例である。特徴量の数が6個以外の場合には、その数に応じて推奨される直交表を用いることが好ましい。直交表において、8個の組み合わせCB1〜CB8が定義されている。直交表の丸記号及びクロス記号は、それぞれ当該組み合わせにおいて特徴量の「採用」及び「除外」を意味する。例えば、組み合わせCB1においては、すべての特徴量a〜特徴量fが採用される。組み合わせCB2においては、特徴量a〜特徴量cが採用され、特徴量d〜特徴量fが除外される。
【0067】
各組み合わせCB1〜CB8ごとに、当該組み合わせに採用されている特徴量を用いて、評価波形に類似するクラスタにおける評価波形のマハラノビス距離D12〜D82を計算する。求められたマハラノビス距離D12〜D82から、それぞれSN比SN1〜SN8を求める。SN比は、
SNi=−10×log10(1/Di2) (i=1〜8)
と定義される。
【0068】
特徴量aの寄与度Baは、特徴量aが採用されている組み合わせCB1〜CB4のSN比SN1〜SN4の平均値から、特徴量aが除外されている組み合わせCB5〜CB8のSN比SN5〜SN8の平均値を減じることにより算出される。具体的には、
Ba=(SN1+SN2+SN3+SN4)/4−(SN5+SN6+SN7+SN8)/4
と定義される。他の特徴量b〜特徴量fについても、同様に寄与度Bb〜寄与度Bfを計算することができる。
【0069】
寄与度の最も大きな特徴量が、原因変数として特定される。原因変数が特定されると、ステップSB5(図5)において、判定結果と、原因変数とを出力する。
【0070】
予め、異常が発生した変速機の波形が取得され、異常箇所と波形の特徴(平均値から大きくずれている特徴量)とを対応付けたデータベースが構築されている。ステップSB415で特定された原因変数と、このデータベースとに基づいて、評価対象の変速機の異常箇所を推定することができる。
【0071】
なお、実施例2においても、実施例1と同様に、正常な変速機から得られた波形をクラスタに分類しているため、良否判定の精度を向上させることができる。
【0072】
上記実施例1及び実施例2では、ステップSB3(図5)において、評価波形に類似するクラスタの抽出に最小二乗法を適用したが、その他の統計的手法を適用してもよい。例えば、マハラノビス−タグチ(MT)法、ニューラルネットワーク等を適用してもよい。
【0073】
実施例1及び実施例2による方法の評価段階は、製品の出荷時に行ってもよいし、製品の備え付け時に行ってもよい。出荷時に評価を行う場合には、評価対象の変速機(個体)と同一型式の他の個体を基準として、評価が行われる。備え付け時に評価を行う場合には、評価対象の変速機(同一個体)の正常動作時に取得されている複数の時間変動情報(参照波形)を基準として、評価が行われる。
【0074】
上記実施例1及び実施例2においては、評価対象として遊星ローラ型変速機を例に挙げたが、実施例1及び実施例2による評価方法は、他の変速機構を用いた変速機、例えば単純遊星変速機、直交歯車変速機、平行軸変速機等に適用することも可能である。
【0075】
以上実施例に沿って本発明を説明したが、本発明はこれらに制限されるものではない。例えば、種々の変更、改良、組み合わせ等が可能なことは当業者に自明であろう。
【符号の説明】
【0076】
10 変速機
12 ケーシング
14 リングローラ
16 遊星ローラ
18 太陽ローラ
20 遊星ローラユニット
22 出力側キャリア
23 出力軸
24 入力側キャリア
26 連結部材
30 入力側キャリア軸受け
32 出力側キャリア軸受け
36 フランジ
38 貫通孔
40 入力軸
42 入力側ケーシング
44 軸受け
46 ボルト
48 オイルシール
50 仕切板
52 オイルシール
60 センサ
61 演算装置
62 記憶装置
63 入力装置
64 出力装置
【技術分野】
【0001】
本発明は、変速機からの時間変動情報に基づいて、変速機の評価を行う方法及び評価装置に関する。
【背景技術】
【0002】
遊星歯車機構の各部の回転動作に基づいて発生した振動を検出し、検出された振動に基づいて、遊星歯車機構の損傷の有無を診断する技術が公知である(特許文献1)。保全状態が良好な遊星歯車機構から発生する振動と、診断対象の遊星歯車機構から発生した振動との特定周波数の検出信号を比較することにより、損傷の種類及び部位が特定される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−43257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
変速機が設置されている環境には、測定対象物以外の場所で発生した振動等の外乱が含まれる。この外乱によって、正常な製品を異常と判定してしまう場合がある。また、変速機では、相互に噛み合う歯車の数が多いため、各部品の寸法誤差が公差内である場合でも、微妙な噛み合わせタイミングのずれ等により、振動波形の形状が異なってしまう。また、継続的に使用していると、摩耗や潤滑不良等によっても、振動波形の形状に経時変化が生じる。このように、個体ごとに、または継続使用によって発生した不良の状況に応じて振動波形に異なる特徴(癖)が現れる。これらの癖を考慮しないで、一律に良否を判定すると、正常な製品を異常と判定してしまう場合がある。また、異常な製品を正常と判定してしまう場合もある。
【0005】
本発明の目的は、判定精度を高めることができる変速機の評価方法を提供することである。本発明の他の目的は、判定精度を高めることができる変速機の評価装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一観点によると、
正常状態の変速機の各々の運転時に発生する複数の波形を、参照波形として取得し、取得された前記参照波形の少なくとも1つの特徴量に基づいて、前記複数の参照波形を複数のクラスタに分類する工程と、
評価対象の変速機を運転し、評価対象の変速機から発生する評価波形を取得する工程と、
前記複数のクラスタから、前記評価波形と最も類似度の高いクラスタを抽出する工程と、
抽出された前記クラスタに属する前記参照波形と、前記評価波形とに基づいて、前記評価波形の良否を判定する工程と
を有する変速機の評価方法が提供される。
【0007】
本発明の他の観点によると、
変速機からの時間変動情報を検知するセンサと、
複数の参照波形を複数のクラスタに分類したときの各クラスタの特徴量、及び評価波形の特徴量が記憶される記憶装置と、
演算装置と、
前記演算装置の演算結果を出力する出力装置と
を有し、
前記演算装置は、
前記センサで検知された変速機からの時間変動情報を評価波形として、該評価波形の特徴量を算出し、
算出された前記評価波形の特徴量を前記記憶装置に記憶させ、
前記評価波形の特徴量、及び前記記憶装置に記憶されている前記クラスタの特徴量に基づいて、前記評価波形と最も類似度の高いクラスタを抽出し、
抽出された前記クラスタの特徴量と、前記評価波形の特徴量とに基づいて、前記評価波形の良否を判定し、
判定結果を前記出力装置に出力する変速機の評価装置が提供される。
【発明の効果】
【0008】
評価波形に類似するクラスタを基準として、評価波形の良否を判定することにより、判定の精度を高めることができる。
【図面の簡単な説明】
【0009】
【図1】変速機の断面図である。
【図2】変速機の、軸方向に直交する断面図である。
【図3】実施例1による変速機の評価装置のブロック図である。
【図4】実施例1による変速機の評価方法の準備段階のフローチャートである。
【図5】実施例1による変速機の評価方法の評価段階のフローチャートである。
【図6】実施例1による変速機の評価方法のステップSB4の詳細なフローチャートである。
【図7】(7A)〜(7C)は、実施例1による変速機の評価方法で取得された参照波形の例を示す図である。
【図8】実施例1による変速機の評価方法で算出された参照波形の特徴量の例を示す図表である。
【図9】実施例1による変速機の評価方法で算出される特徴量の定義を説明するための波形の一例を示す図である。
【図10】実施例1による変速機の評価方法で適用された階層的クラスタ分析により得られたデンドログラムの一例を示す図である。
【図11】実施例1による変速機の評価方法で算出されたクラスタ毎の特徴量の平均値及び標準偏差を示す図表である。
【図12】実施例2による変速機の評価方法のステップSB4の詳細なフローチャートである。
【図13】マハラノビス距離を計算するための計算式を示す図である。
【図14】実施例2による変速機の評価方法で寄与度を算出ために用いる直交表の例を示す図表である。
【発明を実施するための形態】
【0010】
図1に、評価対象である変速機10の断面図の一例を示す。図2に、図1のII−II線に沿う断面図を示す。以下、変速機10を減速機として使用する場合を例に説明するが、この変速機の入力軸及び出力軸を、それぞれ出力軸及び入力軸として動作させると、この変速機は増速機として機能する。
【0011】
ケーシング12に、リングローラ14が一体で形成されている。リングローラ14、遊星ローラ16、太陽ローラ18により、遊星ローラユニット20が構成されている。遊星ローラユニット20の出力側Soに、出力側キャリア22が配置され、入力側Siに、入力側キャリア24が配置されている。複数の連結部材26が、遊星ローラユニット20を軸方向に貫通し、入力側キャリア24と出力側キャリア22とを相互に連結する。出力側キャリア22、入力側キャリア24、及び連結部材26が、キャリアユニット34を構成する。
【0012】
入力側キャリア軸受け30が、ケーシング12に対して入力側キャリア24を、回転可能に支持する。出力側キャリア軸受け32が、ケーシング12に対して出力側キャリア22を回転可能に支持する。キャリアユニット34は、ケーシング12に対して回転可能に、両持ち状態で支持されている。
【0013】
ケーシング12は、筒状体であり、リングローラ14は、軸方向中央近傍の内周部に形成されている。ケーシング12の外周部に、フランジ36が形成されている。フランジ36は、軸方向に関してリングローラ14と同じ位置に配置される。フランジ36に、外部部材に取り付けるための貫通孔38が形成されている。
【0014】
太陽ローラ18に、入力側Siに向けて突出する入力軸取付部18Aが設けられている。入力軸取付部18Aの外周に、入力軸40に嵌合する軸方向のスプラインが形成されている。また、太陽ローラ18に、出力側Soに向かって突出した突起18Bが設けられている。突起18Bは、軸受け39を介して出力側キャリア22に回転可能に支持されている。太陽ローラ18は、軸受け39及び入力軸40により、軸方向の移動が規制されている。
【0015】
入力軸40は、中空構造で、一方の端部の内周に、軸方向のスプラインが形成されている。スプラインが形成されている端部が、太陽ローラ18の入力軸取付部18Aに嵌合している。入力軸40の中空部分に、入力軸取付部18Aとの嵌合部分を塞ぐ内蓋41が嵌め込まれている。内蓋41は、遊星ローラユニット20で使用される潤滑油がスプライン嵌合部から漏出することを防止する。
【0016】
入力軸40の他端には、モータ軸等に摩擦によって結合する摩擦結合部40Aが形成されている。摩擦結合部40Aと他の部分との間に、軸方向と垂直な方向(周方向)に沿うスリット40Bが形成されている。また、摩擦結合部40Aには、その周方向の一部に、軸方向に沿うスリットが形成されている。スリットを跨ぐボルトの締結力により、摩擦結合部40Aの内径が小さくなる。これにより、摩擦結合部40Aとモータ軸等とを、摩擦力で結合させることができる。
【0017】
入力軸40は、筒状の入力軸ケーシング42内に収容され、軸受け44を介して入力軸ケーシング42に回転可能に支持されている。入力軸40と入力軸ケーシング42との間に、オイルシール48が配置されている。オイルシール48は、軸方向に関して、軸受け44よりも入力側Siに配置されている。
【0018】
入力軸ケーシング42は、ボルト46でケーシング12に結合されている。また、入力軸ケーシング42には、摩擦結合部40Aの内径を縮小させるボルトを着脱するための作業孔42Aが形成されている。
【0019】
遊星ローラ16及びリングローラ14の、軸方向両側に、リング板状の一対の仕切板50が設置されている。遊星ローラ16の軸方向の寸法が、リングローラ14の軸方向の寸法より僅かに小さい。これにより、遊星ローラ16は、一対の仕切板50の間で滑らかに回転することができる。
【0020】
連結部材26は、ボルト26A、カラー26B、ピン部材26C、及びスリーブ26Dを含む。ボルト26Aは、入力側キャリア24を貫通し、複数の遊星ローラ16の間を通って出力側キャリア22に螺合している。カラー26Bは、ボルト26Aの外周に嵌合し、入力側キャリア24及び出力側キャリア22に挟まれて、両者の位置決めを行っている。
【0021】
ピン部材26Cは、入力側キャリア24及び出力側キャリア22に嵌め込まれるとともに、遊星ローラ16を貫通している。スリーブ26Dは、遊星ローラ16の内周とピン部材26Cとの間に嵌め込まれており、両者を滑らかに回転させる。遊星ローラ16の軸方向の寸法は、カラー26B、スリーブ26Dの軸方向の寸法より僅かに小さい。これにより、遊星ローラ16は、入力側キャリア24と出力側キャリア22との間で滑らかに回転することができる。
【0022】
出力側キャリア22に、出力側Soに向かって突出する出力軸23が一体に形成されている。出力側キャリア22の外周は、遊星ローラユニット20側の外径が若干小さい段付き形状を有する。小径部に、出力側キャリア軸受け32の内輪が嵌合している。なお、出力側キャリア22の大径部と小径部との間の段差面は、出力側キャリア軸受け32の軸方向の端面に接触している。
【0023】
出力側キャリア22の大径部とケーシング12との間に、オイルシール52が設置されている。また、出力側キャリア22の入力側Siを向く表面に、軸受け39を保持するための凹部22Cが形成されている。
【0024】
入力側キャリア24は、リング状であり、その外周面は、入力側Siの端部が他の部分よりも大きな外径にされた段差形状を有する。この段差面が、入力側キャリア軸受け30の内輪の軸方向の端面に接触している。
【0025】
入力側キャリア軸受け30及び出力側キャリア軸受け32の外径は、リングローラ14の内径よりも大きい。入力側キャリア軸受け30及び出力側キャリア軸受け32には、アンギュラ玉軸受けが用いられる。入力側キャリア軸受け30及び出力側キャリア軸受け32は、入力側キャリア24及び出力側キャリア22に挟まれて、与圧が付与されている。
【0026】
次に、変速機10の作用について説明する。入力軸40が回転すると、これに固定されている太陽ローラ18が、例えば時計方向に回転する。遊星ローラ16は、反時計方向に自転するとともに、時計方向に公転する。遊星ローラ16の公転の回転数は、太陽ローラ18の回転数に対して減速される。遊星ローラ16の公転運動が、ピン部材26Cを介して出力側キャリア22及び出力軸23に伝達される。
【0027】
図3に、実施例1による変速機の評価装置のブロック図を示す。変速機10にセンサ60が取り付けられている。センサ60には、例えば加速度センサが用いられる。センサ60は、変速機10から発生する振動を電気信号に変換し、演算装置61に送出する。なお、センサ60で、振動以外の時間変動情報、例えば、音波、トルク変動等の物理量を検知してもよい。音波を検知する場合には、センサ60に集音マイクを用いればよい。トルク変動を検知する場合には、例えば、変速機10の入力軸を駆動する電気モータの駆動電流を測定すればよい。
【0028】
演算装置61は、センサ60から入力された時間変動情報に基づいて、種々の演算を行う。記憶装置62は、演算装置の演算過程で用いられる種々のデータを記憶する。出力装置64は、演算結果を出力する。入力装置63を通して、オペレータが演算装置61に指示を与える。
【0029】
図4に、実施例1による変速機の評価方法の準備段階のフローチャートを示す。以下の説明では、センサ60で検知される時間変動情報が、振動波形である場合について説明するが、以下に説明する方法は、時間変動情報が音波やトルク変動である場合にも適用することができる。
【0030】
ステップSA1において、複数の正常な変速機10の各々の運転時の振動を、センサ60で検知し、時間変動情報(波形)を取得する。この波形は、演算装置61に入力される。
【0031】
図7A〜図7Cに、3個の変速機10の各々から取得された波形の例を示す。例えば、1つの変速機10から5秒間の波形を取得する。この波形から、最初の200msの部分を切り出す。切り出された時間幅200msの波形を、「参照波形」ということとする。なお、参照波形の時間幅は、必ずしも200msである必要はない。演算装置61は、得られた参照波形を、記憶装置62に記憶させる。
【0032】
図4のステップSA2において、各参照波形の特徴量を算出する。特徴量とは、波形の形状を特徴付ける種々の物理量を意味する。本実施例1においては、特徴量a〜特徴量fの6種類の量を算出した。
【0033】
特徴量aとして、波形の標準偏差を採用し、特徴量bとして、波形の最大波高値を採用した。特徴量aは、比較的振幅の小さな領域で振動している波形の平均的な振幅に対応する。このため、特徴量aは、波形の「下層の高さ」ということができる。特徴量bは、大きな振幅を持つピークのうち、最も高いピークの振幅に相当する。このため、特徴量bは、波形の「上層の高さ(最大波高値)」ということができる。なお、上層の高さを算出する際に、ピークの高さが高いものから順番に、数個のピークを除外して、上層の高さを算出してもよい。これは、極稀に現れる外れ値の影響を排除するためである。
【0034】
特徴量cとして、上層の高さと下層の高さとの比を採用した。特徴量dとして、信号非存在時間の最大値を採用した。特徴量e及び特徴量fとして、それぞれピークの数、及び高いピークの数を採用した。
【0035】
図9を参照して、測定時間(Δt)における「信号非存在時間の最大値」、「ピークの数」、及び「高いピークの数」について説明する。図9に波形の一例を示す。
【0036】
波形の高さが閾値Pth0よりも低い区間T1〜T4を、「信号非存在区間」ということとする。「信号非存在時間の最大値」は、信号非存在区間の各々の時間幅の最大値を意味する。図9に示した波形においては、信号非存在区間T3の時間幅が最も長いため、「信号非存在時間の最大値」として信号非存在区間T3の時間幅が採用される。一般的に、波形に周期の長いうねりがあると、「信号非存在時間の最大値」が大きくなる。測定時間Δtの間で最も高いピークP1の高さ(振幅)を「最大波高値」という。なお、極稀に現れる外れ値を除外するために、ピークの高さが最も高いものから順番にN個のピークを除外する場合には、測定時間Δtの間で、高さがN+1番目のピークの高さを「最大波高値」という。
【0037】
「ピークの数」は、波形が閾値PthLを横切る箇所の数と定義される。図9においては、交差箇所L1〜L10で、波形が閾値PthLを横切っている。この場合には、ピークの数は10になる。「高いピークの数」は、波形が、閾値PthLよりも高い閾値PthHを横切る箇所の数と定義される。図9においては、交差箇所H1〜H4で、波形が閾値PthHを横切っている。この場合には、高いピークの数は4になる。なお、ピークの数、及び高いピークの数として、波形が閾値を下から上に横切った箇所の数、または波形が閾値を上から下に横切った箇所の数と定義してもよい。
【0038】
図8に、正常な変速機の製品(個体)ごとに算出された特徴量a〜特徴量fの一例を示す。例えば、製品番号1の変速機の特徴量a〜特徴量fは、それぞれ2.353、10.555、4.485、0.027816、79、及び42である。
【0039】
図4に戻って説明を続ける。ステップSA3において、ステップSA2で算出された特徴量に基づいてクラスタ分析を行い、参照波形を複数のクラスタに分類する。一例として、階層的クラスタ分析手法が適用される。相互に類似度の高い参照波形が、同一のクラスタに属することになる。
【0040】
図10に、階層的クラスタ分析手法を適用して得られたデンドログラム(樹状図)の一例を示す。図10に示した例では、複数の参照波形が、4つのクラスタCL1〜CL4に分類される。図10に示した例では、製品1、3、4から取得された参照波形がクラスタCL1に分類され、製品6から取得された参照波形がクラスタCL2に分類され、製品2から取得された参照波形がクラスタCL3に分類され、製品5から取得された参照波形がクラスタCL4に分類される。
【0041】
例えば、クラスタCL2に属する参照波形は、パワーが強い、または衝撃が多いという類似点を有する。クラスタCL3に属する参照波形は、低周波成分が強いという類似点を有する。クラスタCL4に属する参照波形は、上層の高さが相対的に高いという類似点を有する。クラスタCL1には、他のクラスタに属しない参照波形が属し、これらの参照波形は、特に目立った特徴を持たない。
【0042】
図7Aの波形は、特に目立った特徴を持たない。図7Bの波形は、ピークの数、及び高いピークの数が多いという特徴を有する。図7Cの波形は、信号非存在時間の最大値が長いという特徴を有する。
【0043】
図4に戻って説明を続ける。ステップSA4において、クラスタ毎に、特徴量a〜特徴量fの各々について、平均値及び標準偏差を算出する。
【0044】
図11に、クラスタ毎に算出された特徴量の平均値及び標準偏差の一例を示す。例えば、クラスタCL1に属する複数の参照波形の特徴量aの平均値がAa1と算出され、特徴量aの標準偏差がσa1と算出される。算出された特徴量a〜特徴量fの各々の平均値及び標準偏差が、記憶装置62(図3)に記憶される。本明細書において、クラスタに属する複数の参照波形の特徴量の平均値を、単に「クラスタの特徴量」という場合がある。
【0045】
図5に、実施例1による変速機の評価方法の評価段階のフローチャートを示す。評価段階は、図11に示したクラスタ毎の特徴量の平均値及び標準偏差が準備された後に実行される。
【0046】
ステップSB1において、評価対象となる変速機10を運転させながら、センサ60(図3)で振動を検知し、波形を取得する。図4のステップSA4と同様に、取得された波形から、時間幅200msの部分を切り出し、評価波形とする。この時間幅は、ステップSA4で取得された参照波形の時間幅と同一とする。
【0047】
ステップSB2において、評価波形の特徴量a〜特徴量fを算出する。ステップSB3において、ステップSB2で算出された特徴量に基づいて、評価波形に最も類似しているクラスタを抽出する。類似するクラスタの抽出には、例えば最小二乗法を適用することができる。具体的には、クラスタ毎に、評価波形の特徴量と、クラスタの特徴量との差の二乗和を求める。この二乗和が最小になるクラスタが、最も類似するクラスタとして抽出される。
【0048】
ステップSB4において、抽出された類似のクラスタの特徴量と、評価波形の特徴量とに基づいて、評価波形の良否を判定する。
【0049】
図6に、ステップSB4の詳細なフローチャートを示す。ステップSB401において、類似のクラスタの特徴量と、評価波形の特徴量との差を、特徴量ごとに算出する。ステップSB402において、特徴量の差が予め定められた許容値以下か否かを判定する。この判定は、特徴量ごとに行われる。また、許容値も、特徴量ごとに予め設定されている。すべての特徴量について、特徴量の差が許容値以下であれば、ステップSB403において、評価波形を正常と判定する。
【0050】
少なくとも1つの特徴量において、類似するクラスタの特徴量と評価波形の特徴量との差が許容値を超える場合には、ステップSB404において、評価波形を異常と判定する。
【0051】
ステップSB403またはSB404の後、ステップSB5(図5)において、判定結果を出力装置64(図1)に出力する。
【0052】
実施例1による方法では、良否の判定が、評価波形が類似するクラスタの特徴量を参照して行われ、他のクラスタの特徴量の影響を受けない。例えば、変速機には、組み立て作業者、組み立て環境や設置環境等に依存する製品(個体)ごとの特徴が存在する。例えば、平均的な個体に比べて低周波振動が強いが、正常に動作するもの、平均的な個体に比べて衝撃が多いが、正常に動作するもの等が存在する。このように、ある特徴を持つ個体は、類似する特徴を持つ他の正常な個体を基準として、良否の判定を行う。これにより、判定の精度を高めることができる。
【0053】
実施例1では、良否判定のための基準となる参照波形を、予めクラスタに分類しておき、評価波形に類似するクラスタを参照して良否の判定を行うため、判定の精度を高めることができる。
【0054】
上記実施例1では、ステップSA2(図4)及びステップSB2(図5)で、複数(6個)の特徴量を算出したが、算出する特徴量の数は6個に限定されない。例えば、1個の特徴量を算出してもよいし、2個〜5個の特徴量を算出してもよいし、7個以上の特徴量を算出してもよい。
【0055】
また、ステップSA3(図4)においてクラスタ分析で用いる特徴量と、ステップSB401(図6)において、良否判定に用いる特徴量とは、同一でなくてもよい。例えば、ステップSA3において、特徴量a〜特徴量dを用いてクラスタ分析を行い、ステップSB401において、特徴量a、特徴量e〜特徴量fを用いて特徴量の差を算出してもよい。
【0056】
各クラスタに属する参照波形に対応する正常な変速機において、長期の運転中に異常が発生する場合がある。これらの異常発生状況を集計すると、クラスタ毎にどのような異常が発生し易いか特徴付けることができる場合がある。
【0057】
ステップSB402(図6)で異常と判定された場合、評価波形が類似するクラスタに基づいて、異常発生箇所を推定することが可能である。例えば、図7Cに示したように、信号非存在時間の最大値が長い特徴を有するクラスタに分類された波形が観測された場合には、ピン部材26c(図1、図2)に偏心が生じていると推定することができる。
【0058】
次に、図12〜図14を参照して、実施例2について説明する。以下、実施例1との相違点に着目して説明し、同一の構成については説明を省略する。
【0059】
実施例2による変速機の評価装置のブロック図は、図3に示した実施例1のものと同一である。また、実施例2による変速機の評価方法も、実施例1の図4のフローチャートと同一の準備段階を含む。実施例2の評価段階は、実施例1の説明で参照した図5のフローチャートと同一である。ただし、ステップSB4の具体的な処理が、実施例1の処理と異なる。
【0060】
図12に、実施例2のステップSB4の詳細なフローチャートを示す。ステップSB411で、評価波形に類似するクラスタにおいて、評価波形のマハラノビス距離を算出する。
【0061】
図13に、クラスタCL1における評価波形のマハラノビス距離DCL12の定義式を示す。図13に示した定義式において、Xa〜Xfは、それぞれ評価波形の特徴量a〜特徴量fの値である。Aa1〜Af1及びσa1〜σf1は、図11に示したクラスタCL1の特徴量の平均値及び標準偏差である。r(a,a)〜r(f,f)を含む行列は、クラスタCL1の特徴量a〜特徴量fの相関行列である。他のクラスタにおいても、同様に、マハラノビス距離を算出することができる。
【0062】
この相関行列は、ステップSA4(図4)で、クラスタ毎の特徴量の平均値及び標準偏差が確定すると、算出可能であり、評価波形には依存しない。すなわち、評価対象のいずれの変速機の評価段階においても、相関行列は共通に使用することが可能である。従って、ステップSA4で、予め相関行列を算出しておくことが好ましい。この相関行列は、図11に示したクラスタ毎の特徴量の平均値及び標準偏差と共に、記憶装置62(図3)に記憶される。相関行列が記憶装置62に記憶されている場合には、変速機の評価ごとに繰返し実行されるステップSB411において、相関行列を算出する必要はない。
【0063】
評価波形と、クラスタCL1に属する参照波形との類似度が高いほど、クラスタCL1における評価波形のマハラノビス距離DCL12が短くなる。
【0064】
ステップSB412において、ステップSB411で算出されたマハラノビス距離が許容値以下か否かを判定する。マハラノビス距離が、予め定められた許容値以下であるということは、評価波形と、正常な変速機から取得された参照波形との類似度が高いことを意味する。このため、マハラノビス距離が許容値以下である場合、ステップSB413において、評価波形を正常と判定する。この許容値は、予め経験的に決定しておくことができる。
【0065】
マハラノビス距離が許容値を超えている場合には、ステップSB414において評価波形を異常と判定する。異常と判定された場合には、ステップSB415において、各特徴量の寄与度を算出し、異常と判定された原因となる特徴量(原因変数)を特定する。以下、寄与度の算出方法について説明する。
【0066】
図14に、寄与度の算出に用いる直交表の一例を示す。図14に示した直交表は、特徴量の数が6個の場合の例である。特徴量の数が6個以外の場合には、その数に応じて推奨される直交表を用いることが好ましい。直交表において、8個の組み合わせCB1〜CB8が定義されている。直交表の丸記号及びクロス記号は、それぞれ当該組み合わせにおいて特徴量の「採用」及び「除外」を意味する。例えば、組み合わせCB1においては、すべての特徴量a〜特徴量fが採用される。組み合わせCB2においては、特徴量a〜特徴量cが採用され、特徴量d〜特徴量fが除外される。
【0067】
各組み合わせCB1〜CB8ごとに、当該組み合わせに採用されている特徴量を用いて、評価波形に類似するクラスタにおける評価波形のマハラノビス距離D12〜D82を計算する。求められたマハラノビス距離D12〜D82から、それぞれSN比SN1〜SN8を求める。SN比は、
SNi=−10×log10(1/Di2) (i=1〜8)
と定義される。
【0068】
特徴量aの寄与度Baは、特徴量aが採用されている組み合わせCB1〜CB4のSN比SN1〜SN4の平均値から、特徴量aが除外されている組み合わせCB5〜CB8のSN比SN5〜SN8の平均値を減じることにより算出される。具体的には、
Ba=(SN1+SN2+SN3+SN4)/4−(SN5+SN6+SN7+SN8)/4
と定義される。他の特徴量b〜特徴量fについても、同様に寄与度Bb〜寄与度Bfを計算することができる。
【0069】
寄与度の最も大きな特徴量が、原因変数として特定される。原因変数が特定されると、ステップSB5(図5)において、判定結果と、原因変数とを出力する。
【0070】
予め、異常が発生した変速機の波形が取得され、異常箇所と波形の特徴(平均値から大きくずれている特徴量)とを対応付けたデータベースが構築されている。ステップSB415で特定された原因変数と、このデータベースとに基づいて、評価対象の変速機の異常箇所を推定することができる。
【0071】
なお、実施例2においても、実施例1と同様に、正常な変速機から得られた波形をクラスタに分類しているため、良否判定の精度を向上させることができる。
【0072】
上記実施例1及び実施例2では、ステップSB3(図5)において、評価波形に類似するクラスタの抽出に最小二乗法を適用したが、その他の統計的手法を適用してもよい。例えば、マハラノビス−タグチ(MT)法、ニューラルネットワーク等を適用してもよい。
【0073】
実施例1及び実施例2による方法の評価段階は、製品の出荷時に行ってもよいし、製品の備え付け時に行ってもよい。出荷時に評価を行う場合には、評価対象の変速機(個体)と同一型式の他の個体を基準として、評価が行われる。備え付け時に評価を行う場合には、評価対象の変速機(同一個体)の正常動作時に取得されている複数の時間変動情報(参照波形)を基準として、評価が行われる。
【0074】
上記実施例1及び実施例2においては、評価対象として遊星ローラ型変速機を例に挙げたが、実施例1及び実施例2による評価方法は、他の変速機構を用いた変速機、例えば単純遊星変速機、直交歯車変速機、平行軸変速機等に適用することも可能である。
【0075】
以上実施例に沿って本発明を説明したが、本発明はこれらに制限されるものではない。例えば、種々の変更、改良、組み合わせ等が可能なことは当業者に自明であろう。
【符号の説明】
【0076】
10 変速機
12 ケーシング
14 リングローラ
16 遊星ローラ
18 太陽ローラ
20 遊星ローラユニット
22 出力側キャリア
23 出力軸
24 入力側キャリア
26 連結部材
30 入力側キャリア軸受け
32 出力側キャリア軸受け
36 フランジ
38 貫通孔
40 入力軸
42 入力側ケーシング
44 軸受け
46 ボルト
48 オイルシール
50 仕切板
52 オイルシール
60 センサ
61 演算装置
62 記憶装置
63 入力装置
64 出力装置
【特許請求の範囲】
【請求項1】
正常状態の変速機の運転時に発生する複数の波形を、参照波形として取得し、取得された前記参照波形の少なくとも1つの特徴量に基づいて、前記複数の参照波形を複数のクラスタに分類する工程と、
評価対象の変速機を運転し、評価対象の変速機から発生する評価波形を取得する工程と、
前記複数のクラスタから、前記評価波形と最も類似度の高いクラスタを抽出する工程と、
抽出された前記クラスタに属する前記参照波形と、前記評価波形とに基づいて、前記評価波形の良否を判定する工程と
を有する変速機の評価方法。
【請求項2】
前記良否を判定する工程において、
前記抽出されたクラスタに属する参照波形の特徴量の平均値と、前記評価波形の対応する特徴量との差に基づいて、良否を判定する請求項1に記載の変速機の評価方法。
【請求項3】
前記良否を判定する工程において、前記抽出されたクラスタにおける前記評価波形のマハラノビス距離に基づいて、良否を判定する請求項1に記載の変速機の評価方法。
【請求項4】
前記良否を判定する工程において、前記評価波形が異常と判定された場合、前記評価波形の複数の特徴量のうち寄与度の最も大きな特徴量を特定する請求項3に記載の変速機の評価方法。
【請求項5】
前記複数のクラスタに分類する工程において、前記参照波形の複数の特徴量に基づいて、クラスタ分析を行う請求項1乃至4のいずれか1項に記載の変速機の評価方法。
【請求項6】
前記クラスタに分類する工程において用いられる前記特徴量は、前記参照波形の波形の最大波高値、及び標準偏差の少なくとも一方を含む請求項1乃至5のいずれか1項に記載の変速機の評価方法。
【請求項7】
前記クラスタに分類する工程において用いられる前記特徴量は、前記参照波形が、第1の閾値を横切った箇所の数、前記第1の閾値よりも大きい第2の閾値を横切った箇所の数を含む請求項1乃至6のいずれか1項に記載の変速機の評価方法。
【請求項8】
前記クラスタに分類する工程において用いられる前記特徴量は、前記参照波形が、第3の閾値を超えていない部分の各々の時間幅の最大値を含む請求項1乃至7のいずれか1項に記載の変速機の評価方法。
【請求項9】
前記評価波形と最も類似度の高いクラスタを抽出する工程において、最小二乗法、ニューラルネット、またはマハラノビス−タグチ法を用いる請求項1乃至8のいずれか1項に記載の変速機の評価方法。
【請求項10】
変速機からの時間変動情報を検知するセンサと、
複数の参照波形を複数のクラスタに分類したときの各クラスタの特徴量、及び評価波形の特徴量が記憶される記憶装置と、
演算装置と、
前記演算装置の演算結果を出力する出力装置と
を有し、
前記演算装置は、
前記センサで検知された変速機からの時間変動情報を評価波形として、該評価波形の特徴量を算出し、
算出された前記評価波形の特徴量を前記記憶装置に記憶させ、
前記評価波形の特徴量、及び前記記憶装置に記憶されている前記クラスタの特徴量に基づいて、前記評価波形と最も類似度の高いクラスタを抽出し、
抽出された前記クラスタの特徴量と、前記評価波形の特徴量とに基づいて、前記評価波形の良否を判定し、
判定結果を前記出力装置に出力する変速機の評価装置。
【請求項1】
正常状態の変速機の運転時に発生する複数の波形を、参照波形として取得し、取得された前記参照波形の少なくとも1つの特徴量に基づいて、前記複数の参照波形を複数のクラスタに分類する工程と、
評価対象の変速機を運転し、評価対象の変速機から発生する評価波形を取得する工程と、
前記複数のクラスタから、前記評価波形と最も類似度の高いクラスタを抽出する工程と、
抽出された前記クラスタに属する前記参照波形と、前記評価波形とに基づいて、前記評価波形の良否を判定する工程と
を有する変速機の評価方法。
【請求項2】
前記良否を判定する工程において、
前記抽出されたクラスタに属する参照波形の特徴量の平均値と、前記評価波形の対応する特徴量との差に基づいて、良否を判定する請求項1に記載の変速機の評価方法。
【請求項3】
前記良否を判定する工程において、前記抽出されたクラスタにおける前記評価波形のマハラノビス距離に基づいて、良否を判定する請求項1に記載の変速機の評価方法。
【請求項4】
前記良否を判定する工程において、前記評価波形が異常と判定された場合、前記評価波形の複数の特徴量のうち寄与度の最も大きな特徴量を特定する請求項3に記載の変速機の評価方法。
【請求項5】
前記複数のクラスタに分類する工程において、前記参照波形の複数の特徴量に基づいて、クラスタ分析を行う請求項1乃至4のいずれか1項に記載の変速機の評価方法。
【請求項6】
前記クラスタに分類する工程において用いられる前記特徴量は、前記参照波形の波形の最大波高値、及び標準偏差の少なくとも一方を含む請求項1乃至5のいずれか1項に記載の変速機の評価方法。
【請求項7】
前記クラスタに分類する工程において用いられる前記特徴量は、前記参照波形が、第1の閾値を横切った箇所の数、前記第1の閾値よりも大きい第2の閾値を横切った箇所の数を含む請求項1乃至6のいずれか1項に記載の変速機の評価方法。
【請求項8】
前記クラスタに分類する工程において用いられる前記特徴量は、前記参照波形が、第3の閾値を超えていない部分の各々の時間幅の最大値を含む請求項1乃至7のいずれか1項に記載の変速機の評価方法。
【請求項9】
前記評価波形と最も類似度の高いクラスタを抽出する工程において、最小二乗法、ニューラルネット、またはマハラノビス−タグチ法を用いる請求項1乃至8のいずれか1項に記載の変速機の評価方法。
【請求項10】
変速機からの時間変動情報を検知するセンサと、
複数の参照波形を複数のクラスタに分類したときの各クラスタの特徴量、及び評価波形の特徴量が記憶される記憶装置と、
演算装置と、
前記演算装置の演算結果を出力する出力装置と
を有し、
前記演算装置は、
前記センサで検知された変速機からの時間変動情報を評価波形として、該評価波形の特徴量を算出し、
算出された前記評価波形の特徴量を前記記憶装置に記憶させ、
前記評価波形の特徴量、及び前記記憶装置に記憶されている前記クラスタの特徴量に基づいて、前記評価波形と最も類似度の高いクラスタを抽出し、
抽出された前記クラスタの特徴量と、前記評価波形の特徴量とに基づいて、前記評価波形の良否を判定し、
判定結果を前記出力装置に出力する変速機の評価装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−189319(P2012−189319A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−41438(P2011−41438)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
[ Back to top ]