
変速機ニュートラル位置判定装置
【課題】ニュートラルセンサの製造ばらつきなどに起因して出力電圧の上下限値がばらつくときも、製造コストの増大や構成の複雑化を招くことなく、ニュートラル位置の判定精度を向上させるようにした変速機ニュートラル位置判定装置を提供する。
【解決手段】運転者の操作に応じて変速ギヤをニュートラル位置などの間で移動させるシフト部材の付近の部位に取り付けられたニュートラルセンサの出力電圧Vをしきい値VTHと比較してニュートラル位置にあるか否か判定するようにした変速機ニュートラル位置判定装置において、ニュートラルセンサについて予測される製造ばらつきと取り付けばらつきと環境・外乱による劣化とからなるセンサ固有ばらつきと動作電圧のばらつきを含むセンサ出力変換ばらつきとに基づいて上限値と下限値のばらつき予測値を求め、その予測値で修正される修正上下限値の間にしきい値を設定する。
【解決手段】運転者の操作に応じて変速ギヤをニュートラル位置などの間で移動させるシフト部材の付近の部位に取り付けられたニュートラルセンサの出力電圧Vをしきい値VTHと比較してニュートラル位置にあるか否か判定するようにした変速機ニュートラル位置判定装置において、ニュートラルセンサについて予測される製造ばらつきと取り付けばらつきと環境・外乱による劣化とからなるセンサ固有ばらつきと動作電圧のばらつきを含むセンサ出力変換ばらつきとに基づいて上限値と下限値のばらつき予測値を求め、その予測値で修正される修正上下限値の間にしきい値を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は変速機ニュートラル位置判定装置に関し、より具体的には運転者によるクラッチペダル操作に応じてクラッチを断接する変速機を備えると共に、ニュートラルセンサの出力から変速ギヤがニュートラル位置にあるか否か判定するようにした装置に関する。
【背景技術】
【0002】
運転者のシフトレバー操作に応じて変速ギヤニュートラル位置からインギヤ位置に移動させるシフト部材を備えると共に、ニュートラルセンサの出力をしきい値と比較して変速ギヤがニュートラル位置にあるか否かを判定する技術は、例えば特許文献1記載の技術から知られている。
【0003】
特許文献1記載の技術は、シフトレバーのニュートラル位置におけるセンサ出力を学習し、それに応じて各シフト位置の判定領域を増減するように構成している。
【0004】
また、特許文献2記載の技術のように、変速機に同種構造のニュートラルスイッチを2個、並列に配置し、両者の出力が一致するか否かを判断してニュートラル位置にあるか否かを判定することも提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−173478号
【特許文献2】特開2008−302821号
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ニュートラルセンサは製造ばらつき、取り付けばらつき、環境・外乱による劣化などに起因して出力電圧の上下限値がばらつき、上下限値の間のしきい値設定に使用できる余裕代が減少し、その結果、センサ出力によってニュートラル位置にあるか否かを精度良く判定することができない。
【0007】
他方、ニュートラルセンサの製造時や取り付け時の公差を小さく設定する、あるいは特許文献1記載の学習補正の手法を流用して取り付け時のセンサ特性を学習補正すると、製造コストが増大する。また特許文献2記載の技術のようにセンサ(スイッチ)を二重化して相互の出力を監視することも考えられるが、追加のセンサが必要となって構成が複雑となる不都合がある。
【0008】
従って、この発明の目的は上記した課題を解決し、ニュートラルセンサの製造ばらつきなどに起因して出力電圧の上下限値がばらつくときも、製造コストの増大や構成の複雑化を招くことなく、ニュートラル位置の判定精度を向上させるようにした変速機ニュートラル位置判定装置を提供することにある。
【課題を解決するための手段】
【0009】
上記した課題を解決するために、請求項1にあっては、車両に搭載されるエンジンの出力を変速して車輪に伝達すると共に、変速ギヤを有する変速機と、前記エンジンの駆動軸と変速機の間に介挿され、運転者の操作に応じて前記エンジンの出力を前記変速機に伝達する機械式摩擦クラッチと、運転者の操作に応じて前記変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材と、前記シフト部材の付近の部位に取り付けられると共に、供給される動作電圧で規定される上限値と下限値の間で前記シフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサと、前記ニュートラルセンサの出力電圧Vをしきい値VTHと比較して前記変速ギヤがニュートラル位置にあるか否か判定するようにプログラムされたマイクロコンピュータからなる電子制御ユニットとを備えた変速機ニュートラル位置判定装置において、前記ニュートラルセンサについて予測される製造ばらつきと前記部位への取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと前記動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて前記上限値と下限値のばらつき予測値を求め、前記求めたばらつき予測値で修正される修正上限値と修正下限値の間に前記しきい値を設定する如く構成した。
【0010】
請求項2に係る変速機ニュートラル位置判定装置にあっては、前記センサ出力変換ばらつきは、前記センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、前記動作電圧を供給する電源線で予測される電磁波ノイズとのうちの少なくともいずれかを含む如く構成した。
【0011】
請求項3に係る変速機ニュートラル位置判定装置にあっては、前記電子制御ユニットのマイクロコンピュータは、前記センサ出力電圧Vが前記上限値と修正上限値の間にあるときは前記センサ出力電圧Vを前記上限値に、前記下限値と修正下限値の間にあるときは前記センサ出力電圧Vを前記下限値にクランプするようにプログラムされる如く構成した。
【0012】
請求項4に係る変速機ニュートラル位置判定装置にあっては、前記センサ出力変換ばらつきは、前記センサ出力電圧Vを前記上限値または下限値にクランプするときのばらつきを含む如く構成した。
【発明の効果】
【0013】
請求項1にあっては、運転者の操作に応じて変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材の付近の部位に取り付けられ、供給される動作電圧で規定される上限値と下限値の間でシフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサと、その出力電圧Vをしきい値VTHと比較して変速ギヤがニュートラル位置にあるか否か判定する電子制御ユニットとを備えた変速機ニュートラル位置判定装置において、ニュートラルセンサについて予測される製造ばらつきと取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて上限値と下限値のばらつき予測値を求め、求めたばらつき予測値で修正される修正上限値と修正下限値の間にしきい値を設定するように構成したので、ニュートラルセンサの製造ばらつきなどに起因して出力電圧の上下限値がばらつくときも、しきい値を、求めたばらつき予測値で修正される修正上限値と修正下限値の間に設定することで、ニュートラル位置の判定精度、即ち、ニュートラル位置にあるか否かの判定精度を向上させることができる。
【0014】
また、ニュートラルセンサの製造時などの公差の変更やセンサ特性の学習補正を不要としたので、製造コストの増大を招くことがないと共に、センサを二重系にすることもないので、構成の複雑化を招くこともない。
【0015】
さらに、製造ばらつきなどのセンサ固有のばらつきと動作電圧などのセンサ出力の変換ばらつきとに分類して予測することで、ばらつき予測値を遺漏なく求めることができ、よって予測値で修正される修正上下限値の間にしきい値を適切に設定することが可能となり、ニュートラル位置にあるか否かの判定精度を一層向上させることができる。
【0016】
その結果、例えばアイドリングストップ制御を行うときも、ニュートラル位置にあるか否かを精度良く判定できることから、エンジンの停止・再始動を適正に行うことができ、燃料消費量を低減することが可能となる。
【0017】
請求項2に係る変速機ニュートラル位置判定装置にあっては、センサ出力変換ばらつきは、センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、動作電圧を供給する電源線で予測される電磁波ノイズとのうちの少なくともいずれかを含む如く構成したので、上記した効果に加え、ばらつき予測値を一層遺漏なく求めることができる。
【0018】
請求項3に係る変速機ニュートラル位置判定装置にあっては、電子制御ユニットのマイクロコンピュータは、センサ出力電圧Vが上限値と修正上限値の間にあるときは上限値に、下限値と修正下限値の間にあるときは下限値にクランプするようにプログラムされる如く構成したので、上記した効果に加え、製造時における管理が容易となる。即ち、出力電圧Vの上限値および下限値が固定値とされるために製造時の管理が容易となり、よって作業性を向上することができる。
【0019】
また、下限値は変速ギヤ、より具体的にはそのドグ歯が隣接する受け側に接触する境界を示す値となることから、ニュートラル位置にあるか否かを確実に判定することができる。
【0020】
請求項4に係る変速機ニュートラル位置判定装置にあっては、センサ出力変換ばらつきは、センサ出力電圧Vを上限値または下限値にクランプするときのばらつきを含む如く構成、換言すれば、シフト部材等の構成部品の公差ばらつきを含む如く構成したので、上記した効果に加え、ニュートラル位置にあるか否かを一層確実に判定することができる。
【図面の簡単な説明】
【0021】
【図1】この発明の実施例に係る変速機ニュートラル位置判定装置を全体的に示す概略図である。
【図2】図1に示すシフト機構の、変速機の入出力軸の軸端から見た、説明側面図である。
【図3】図2に示すシフト機構の拡大説明上面図である。
【図4】図1に示す変速機ニュートラル位置判定装置としてのECUの構成を示すブロック図である。
【図5】図1に示すニュートラルセンサの出力電圧特性を示す説明図である。
【図6】図4に示すECUの動作を示すフロー・チャートである。
【図7】図1に示すニュートラルセンサの出力電圧特性を示す説明図で、この発明の特徴を示す説明図である。
【発明を実施するための形態】
【0022】
以下、添付図面を参照してこの発明に係る変速機ニュートラル位置判定装置を実施するための形態について説明する。
【実施例】
【0023】
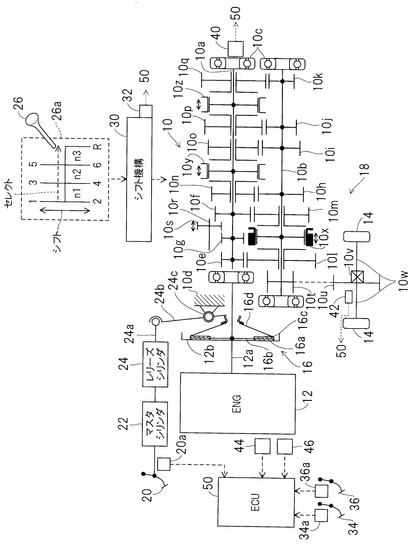
図1はこの発明の実施例に係る変速機ニュートラル位置判定装置を全体的に示す概略図である。
【0024】
以下説明すると、符号10はエンジン(ENG)12の出力を入力して変速して車輪14に伝達する手動変速機(以下「変速機」という)を示す。変速機10は前進6速、後進(RVS)1速の変速ギヤ(速度段)、即ち、前進n速(n≧2。具体的にはn=6)の変速ギヤを有する。
【0025】
エンジン12は例えばガソリンを燃料とする火花点火式の内燃機関からなり、エンジン12の駆動軸(クランク軸)12aと変速機10の間には運転者の操作に応じてエンジン12の出力を変速機10に伝達する機械式摩擦クラッチ16が介挿される。エンジン12は車輪14などで部分的に示される車両18に搭載される。
【0026】
機械式摩擦クラッチ(以下「クラッチ」という)16はエンジン12の駆動軸12a、より正確には駆動軸12aに固定されたフライホイール12bに接触可能なドーナツ状のクラッチディスク(摩擦材)16aが円周上に貼り付けられたクラッチプレート16bと、その背後(フライホイール側)に配置される、クラッチディスク16aと同一形状のプレッシャプレート(摩擦材)16cと、その上に配置されるダイヤフラム状のスプリング16dを備える。
【0027】
クラッチディスク16a(とプレッシャプレート16c)は、スプリング16dによってエンジン12のフライホイール12bに押圧されることで締結してエンジンの出力を変速機10に伝達する。
【0028】
車両運転席の床面に運転者の操作自在に設けられるクラッチペダル20は公知のマスタシリンダ(油圧シリンダ)22とレリーズシリンダ24(油圧シリンダ)を介してクラッチ16に接続される。
【0029】
クラッチペダル20はピストンロッドを介してマスタシリンダ22の内部に摺動自在に収容されたピストンに連結される。マスタシリンダ22は配管を介してレリーズシリンダ24に接続されて油圧を給排する。レリーズシリンダ24の内部にもピストンが摺動自在に収容される。
【0030】
レリーズシリンダ24においてピストンはピストンロッド24aを備え、ピストンロッド24aはレリーズフォーク24bに連結される。レリーズフォーク24bは変速機ケース10dに固定されるレリーズピボット24cを介してクラッチ16のスプリング16dに連結される。
【0031】
運転者がクラッチペダル20を踏む(操作する)と、その踏み力はマスタシリンダ22からレリーズシリンダ24に油圧として伝えられ、踏み量に相当する距離だけレリーズシリンダ24のピストンロッド24aはストロークしてレリーズフォーク24bを前後方向に駆動する。
【0032】
図示の如く、レリーズピボット24cはレリーズフォーク24bの中央位置よりもクラッチ16に接近して配置されるので、そこを支点とするレリーズフォーク24bの移動は増力されてクラッチ16のスプリング16dに伝達され、スプリング16dを押圧してクラッチ16を開放位置に駆動する。
【0033】
他方、運転者がクラッチペダル20から足を離すと、クラッチ16(のクラッチプレート16b)はスプリング16dの付勢力によってエンジン12の駆動軸12aを伝達する締結位置に移動する。
【0034】
変速機10は、エンジン12の駆動軸12aに接続されてエンジン12の出力を入力する入力軸(メインシャフト)10aと、入力軸10aと平行に設けられると共に、車輪14に接続される出力軸(カウンタシャフト)10bを備える。入力軸10aと出力軸10bはベアリング10cを介して変速機ケース10dに回転自在に支承される。
【0035】
入力軸10aには1速ドライブギヤ10eと2速ドライブギヤ10fとRVS(後進)ドライブギヤ10gとが回転不能に配置されると共に、出力軸10bには3速ドライブギヤ10hと4速ドライブギヤ10iと5速ドライブギヤ10jと6速ドライブギヤ10kが回転不能に配置される。
【0036】
また、出力軸10bには1速ドライブギヤ10eと噛合する1速ドリブンギヤ10lと2速ドライブギヤ10fと噛合する2速ドリブンギヤ10mとが回転可能に配置されると共に、入力軸10aには3速ドライブギヤ10hと噛合する3速ドリブンギヤ10nと4速ドライブギヤ10iと噛合する4速ドリブンギヤ10oと5速ドライブギヤ10jと噛合する5速ドリブンギヤ10pと6速ドライブギヤ10kと噛合する6速ドリブンギヤ10qとが回転可能に配置される。
【0037】
さらに、RVS軸10rにはRVSドライブギヤ10gと噛合可能なRVSギヤ10sがRVS軸10rに対して回転不能に配置される。出力軸10bにはギヤ10tが出力軸10bに対して回転不能に配置される。
【0038】
ギヤ10tはギヤ10uを介してディファレンシャル機構10vに接続される。ディファレンシャル機構10vはドライブ軸10wを介して車輪14に接続される。
【0039】
入力軸10aと出力軸10bの付近には1−2速スリーブ10xと3−4速スリーブ10yと5−6速スリーブ10zとが配置される。
【0040】
他方、車両運転席には運転者の操作自在にシフトレバー26が配置される。シフトレバー26は、シフトアームやシフトピース(後述)などで規定されるシフトパターン26a内を運転者の操作に応じて移動自在に構成される。
【0041】
シフトパターン26aにおいて1−2,3−4,5−6速のそれぞれの中央位置n1,n2,n3がニュートラル位置N(1速ドライブギヤ10eなどの変速ギヤのいずれも入力軸10aにも出力軸10bにも固定されない(インギヤされない)位置)を示す。
【0042】
図示の如く、この明細書でシフトレバー26の前進1−6速とRのいずれかに向けての移動を「シフト」、ニュートラル位置n1,n2,n3が連続する方向に沿っての移動を「セレクト」という。
【0043】
シフトレバー26はシフト機構30を介して上記したスリーブ10x,10y,10zに機械的に接続される。
【0044】
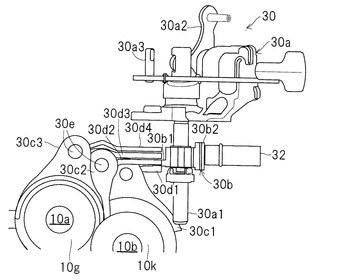
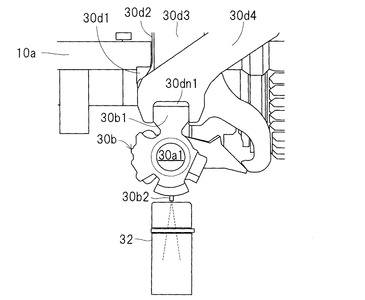
図2はシフト機構30の、変速機10の入出力軸10a,10bの軸端から見た、説明側面図、図3はその拡大説明上面図である。図2、図3において図1に示したスリーブ10x,10y,10zなどの図示を省略した。
【0045】
図2に示す如く、シフト機構30は、軸部材30aと、軸部材30aに固定されると共に、鉄などの磁性体からなるシフトアーム30bと、シフトフォーク30cと、シフトアーム(シフト部材)30bとシフトフォーク30c(30c1,30c2などと示す)を連結するシフトピース30d(30d1,30d2などと示す)を備える。
【0046】
シフトフォーク30cは、1−2速スリーブ10xに係合される1−2速シフトフォーク30c1と、3−4速スリーブ10yに係合される3−4速シフトフォーク30c2と、5−6速スリーブ10zに係合される5−6速シフトフォーク30c3と、RVSギヤ10sに係合されるRシフトフォーク30c4(図示せず)からなる。4個のシフトフォークを30cnで総称する。
【0047】
シフトピース30dは、シフトフォーク30cを貫通してシフトフォーク30cに固定されるフォークシャフト30eに取り付けられるプレート状の部材からなり、1−2速シフトフォーク30c1に取り付けられる1−2速シフトピース30d1と、3−4速シフトフォーク30c2に取り付けられる3−4速シフトピース30d2と、5−6速シフトフォーク30c3に取り付けられる5−6速シフトピース30d3と、Rシフトフォーク30c4に取り付けられるRシフトピース30d4からなる。4個のシフトピースを30dnで総称する。
【0048】
図3に示す如く、4個のシフトピース30dnの他端側はそれぞれスパナ状に形成された係合部30dn1を有し、係合部30dn1はシフトアーム30bの突起30b1と係合し、よってシフトフォーク30cnを介して対応するスリーブ10x,10y,10zのいずれかを入力軸10aあるいは出力軸10bの軸方向に移動可能に構成される。
【0049】
軸部材30aは長軸30a1を有し、長軸30a1は一端側でシフトレバー30(図2などで図示省略)にロッドを介して連結されるリンク30a2に係合されて軸方向に移動(セレクト)可能であると共に、シフトレバー26にワイヤで連結される係止部30a3を介して長軸30a1の軸回り方向に回転(シフト)可能に構成される。
【0050】
図2に示す如く、シフトアーム30bは4個のシフトピース30dnのうちの3個と同程度の軸方向厚みを有すると共に、1個と同程度の軸方向厚みを有する突起30b1が形成される。
【0051】
即ち、シフト機構30においてシフトアーム30bは運転者によって操作されるシフトレバー26の動きに応じて軸部材30aを介して軸方向に移動(セレクト)させられて4個のシフトピース30dnの1個と常に係合すると共に、軸回り方向に移動(シフト)させられて係合する1個のシフトピースを入力軸10aあるいは出力軸10bの軸方向に移動(ギヤイン)させるように構成される。
【0052】
運転者によってクラッチペダル20が踏まれてクラッチ16が開放位置に操作されると共に、シフトレバー26が操作されると、それに応じてシフト機構30を介してスリーブ10x,10y,10zが図1で左右に移動させられて変速がなされる。
【0053】
例えば、シフトレバー26が1速位置に操作されると、それに応じて1−2速スリーブ10xは図1で左動して1速ドリブンギヤ10lを出力軸10bに固定する。
【0054】
その結果、1速段が確立され、エンジン12の出力はクラッチ16を介して入力軸10aに伝達され、1速ドライブギヤ10e、1速ドリブンギヤ10l、出力軸10b、ギヤ10t、ギヤ10u、ディファレンシャル機構10v、ドライブ軸10w、車輪14へと伝達され、車両を前進方向に走行させる。
【0055】
シフトレバー26が2速位置に操作されると、1−2速スリーブ10xは図1で右動して2速ドリブンギヤ10mを出力軸10bに固定する結果、2速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、2速ドライブギヤ10f、2速ドリブンギヤ10m、出力軸10b、ギヤ10tへと伝達される。
【0056】
シフトレバー26が3速位置に操作されると、3−4速スリーブ10yは図1で左動して3速ドリブンギヤ10nを入力軸10aに固定する結果、3速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、3速ドリブンギヤ10n、出力軸10b、3速ドライブギヤ10h、ギヤ10tへと伝達される。
【0057】
シフトレバー26が4速位置に操作されると、3−4速スリーブ10yは図1で右動して4速ドリブンギヤ10oを入力軸10aに固定する結果、4速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、4速ドリブンギヤ10o、4速ドライブギヤ10i、出力軸10b、ギヤ10tへと伝達される。
【0058】
シフトレバー26が5速位置に操作されると、5−6速スリーブ10zは図1で左動して5速ドリブンギヤ10pを入力軸10aに固定する結果、5速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、5速ドリブンギヤ10p、5速ドライブギヤ10j、出力軸10b、ギヤ10tへと伝達される。
【0059】
シフトレバー26が6速位置に操作されると、5−6速スリーブ10zは図1で右動して6速ドリブンギヤ10qを入力軸10aに固定する結果、6速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、6速ドリブンギヤ10q、6速ドライブギヤ10k、出力軸10b、ギヤ10tへと伝達される。
【0060】
シフトレバー26がR(RVS)位置に操作されると、RVSギヤ10sは図1で左動してRVSドライブギヤ10gと噛合する結果、後進1速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、RVSドライブギヤ10g、RVSギヤ10q、1−2速スリーブ10x、出力軸10b、ギヤ10t、ギヤ10u、ディファレンシャル機構10v、ドライブ軸10w、車輪14へと伝達され、車両を後進方向に走行させる。
【0061】
図2と図3の説明に戻ると、シフトアーム30bにおいて、突起30b1の形成位置と反対側には4個のシフトフォーク30cと同程度の軸方向厚みを有する第2の突起30b2が形成される。以下、この第2の突起30b2を「ターゲット」という。
【0062】
ターゲット30b2の付近には、ニュートラルセンサ32が変速機ケース10d(図示省略。前記した「部位」)に固定され、変速機ケース10dの内部にMTF(変速機作動油)に曝されて配置される。図3に良く示す如く、シフトアーム30bは長軸30a1を中心として回転可能に構成されると共に、所定角度(例えば中央位置から左右に数度程度)の範囲がニュートラル位置を示すように構成される。
【0063】
ニュートラルセンサ32は磁界に比例したホール起電力を生じるホール素子を備え、シフトアーム30bの回転によるターゲット30b2の移動、換言すればシフトアーム30bとの離間距離に応じた出力を生じる。
【0064】
図1の説明に戻ると、車両18の運転席床面に配置されるクラッチペダル20の付近にはクラッチペダルスイッチ20aが配置され、運転者によってクラッチペダル20が操作される(踏まれる)度に信号を出力する。
【0065】
車両運転席床面にクラッチペダル20と並んで配設されるブレーキペダル34の付近にはブレーキスイッチ34aが配置されて運転者によってブレーキペダル34が踏まれる(ブレーキ操作される)度に信号を出力すると共に、アクセルペダル36の付近にはアクセル開度センサ36aが配置されて運転者によるアクセルペダル36の踏み込み量に応じたアクセル開度を示す出力を生じる。
【0066】
変速機10の入力軸10aの付近には第1の回転数センサ40が配置されて入力軸10aの回転数NMを示す出力を生じると共に、ドライブ軸10wの付近には第2の回転数センサ42が配置されてドライブ軸10wの回転数、即ち、車速を示す出力を生じる。
【0067】
エンジン12の駆動軸12aの付近にはクランク角センサ44が配置されてピストン(図示せず)の位置を通じてエンジン12の回転数NEを示す出力を生じると共に、吸気管(図示せず)には絶対圧センサ46が配置されてエンジン12の負荷を示す吸気管内絶対圧PBAを示す出力を生じる。
【0068】
上記したセンサ群の出力はECU(Electronic Control Unit。電子制御ユニット)50に入力される。ECU50はCPU,ROM,RAM,I/Oなどからなるマイクロコンピュータを備える。
【0069】
ECU50はクランク角センサ44、絶対圧センサ46などの出力に基づいてエンジン12の燃料供給、点火時期などの動作を制御すると共に、前記したニュートラルセンサ32の出力に基づいて変速ギヤがニュートラル位置にあるか否か判定する変速機のニュートラル位置判定装置としても機能する。
【0070】
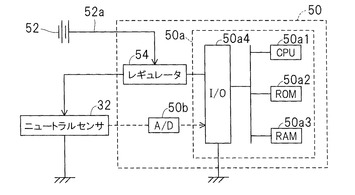
図4は変速機ニュートラル位置判定装置としてのECU50の構成を示すブロック図である。
【0071】
前記した如く、ECU50はCPU50a1,ROM50a2,RAM50a3,I/O50a4などからなるマイクロコンピュータ50aを備えると共に、A/D変換回路50bを備え、ニュートラルセンサ32の出力はA/D変換回路50bでデジタル値に変換されてI/O50a4を介してRAM40cに格納される。
【0072】
ECU50は車両18に搭載される定格出力12Vのバッテリ52(図1で図示省略)からワイヤ(電源線)52aを介して3.3Vに降圧された動作電圧を供給されて動作する。ECU50はさらにレギュレータ54を備え、レギュレータ54の動作を制御し、バッテリ52から供給された電圧を5Vに降圧してニュートラルセンサ32に供給する。
【0073】
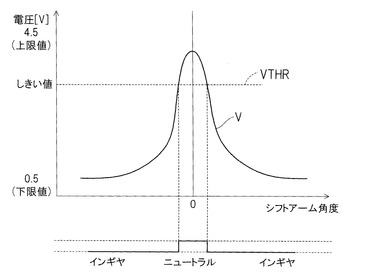
図5にニュートラルセンサ32の出力電圧特性を示す。ニュートラルセンサ32は本来的には、図示の如く、供給される動作電圧5Vで規定される上限値(例えば4.5V)と下限値(例えば0.5V)の間でシフトアーム30bの回転によるターゲット30b2との離間距離に応じた出力電圧Vを生じる。
【0074】
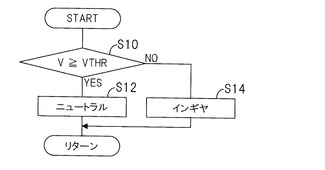
図6はECU50のニュートラル位置判定動作を示すフロー・チャートである。
【0075】
以下説明すると、S10においてニュートラルセンサ32の出力電圧Vをしきい値VTHと比較し、出力電圧Vがしきい値VTH以上か否か判断し、肯定されるときはS12に進んで変速ギヤ10e,10f,..がニュートラル位置にあると判定する一方、否定されるときはS14に進み、変速ギヤがインギヤ位置にあると判定する。
【0076】
このように、ECU50のマイクロコンピュータ50aは、ニュートラルセンサ32の出力電圧Vをしきい値VTHと比較して変速ギヤがニュートラル位置にあるか否か判定するようにプログラムされる。
【0077】
ここで、この発明の課題を再説すると、図5に示す上下限値は実際にはニュートラルセンサ32の製造ばらつきなどに起因してばらつき、ニュートラル位置にあるか否かを精度良く判定することができない。従って、この発明は、出力電圧Vの上下限値がばらつくときも、製造コストの増大や構成の複雑化を招くことなく、ニュートラル位置にあるか否かの判定精度を向上させるようにした変速機ニュートラル位置判定装置を提供することにある。
【0078】
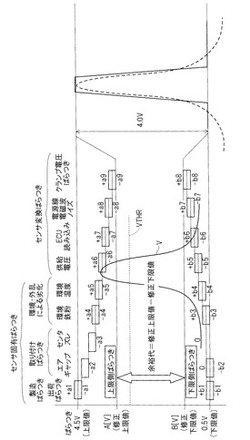
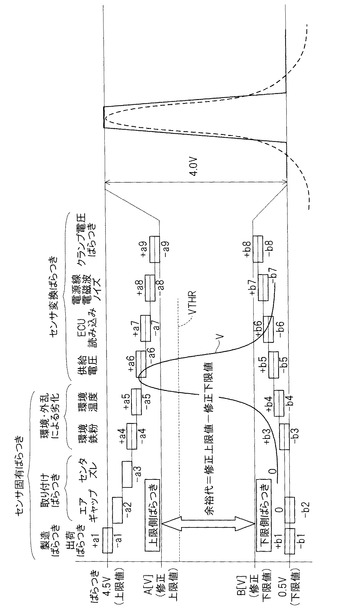
その意図から、この実施例にあっては、図7に示す如く、ニュートラルセンサ32について予測される製造(出荷)ばらつきと変速機ケース(部位)10dへの取り付けばらつきと所定年(例えば10年)の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと、動作電圧5Vのばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて上限値(例えば4.5V)と下限値(例えば0.5V)のばらつき予測値(後述するa1からa9、およびb1からb8)を求め、求めたばらつき予測値で修正される修正上限値(図7で「A[V]」と示す)と修正下限値(図7で「B[V]」と示す)の間にしきい値VTHRを設定する如く構成した。
【0079】
即ち、センサ固有ばらつきは製造(出荷)ばらつきと取り付けばらつきと環境・外乱による劣化とを含み、上限値側にあっては、製造(出荷)ばらつきを±a1と予測する。
【0080】
取り付けばらつきとしてはエアギャップ(ニュートラルセンサ32とターゲット30b2との離間距離)のばらつきを−a2、センタズレ(ターゲット30b2の変速機ケース10dへの取り付けずれ)のばらつきを−a3と予測する。
【0081】
環境・外乱による劣化としてはMTFに混入される鉄粉などによる所定年(例えば10年)にわたる汚染に起因するばらつきを±a4、環境温度、即ち、車両18が位置する場所の外気温度によるMTFの粘性の変化によるばらつきを±a5と予測する。
【0082】
センサ出力変換ばらつきとしては、ECU50のレギュレータ54の降圧を制御するときの動作(供給)電圧のばらつきとして±a6、ECU50のA/D変換回路50eを介してデジタル値に変換されたニュートラルセンサ32の出力の読み込みのときのばらつきとして±a7、またワイヤ(電源線)52aでの電磁波ノイズによるばらつきとして±a8を予測する。
【0083】
さらに、ECU50は、図7に示す如く、センサ出力電圧Vが上限値と修正上限値の間にあるときはセンサ出力電圧Vを上限値に、下限値と修正下限値の間にあるときはセンサ出力電圧Vを下限値にクランプするようにプログラムされるが、センサ出力変換ばらつきとしてそのセンサ出力電圧Vを上限値または下限値にクランプするときのばらつきを含むと共に、その値を±a9と予測する。尚、上記した上限値側ばらつきa1,a2などは具体的には電圧Vで示される。
【0084】
また、下限値側にあっても同様に、各ばらつきをそれぞれb1からb8と予測する。下限値側ばらつきb1,b2なども上限値側ばらつきa1,a2などと同様、具体的には電圧Vで示される。尚、下限値側のばらつきb1からb8はインギヤ判定に関する値であり、センサ32のターゲット30b2の中心位置からのずれによるばらつき(図7でセンタズレと示す)は発生しない。
【0085】
上記した如く、この実施例にあっては、車両18に搭載されるエンジン12の出力を変速して車輪14に伝達すると共に、変速ギヤ10e,10f,..を有する変速機10と、前記エンジン12の駆動軸12aと変速機10の間に介挿され、運転者の操作に応じて前記エンジン12の出力を前記変速機10に伝達する機械式摩擦クラッチ16と、運転者の操作に応じて前記変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材(シフトアーム)30bと、前記シフト部材の付近の部位に取り付けられると共に、供給される動作電圧で規定される上限値と下限値の間で前記シフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサ32と、前記ニュートラルセンサの出力電圧Vをしきい値VTHと比較して前記変速ギヤがニュートラル位置にあるか否か判定(検出)するようにプログラムされたマイクロコンピュータ50aからなるECU(電子制御ユニット)50とを備えた変速機ニュートラル位置判定装置において、前記ニュートラルセンサ32について予測される製造ばらつきと前記部位への取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと前記動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて前記上限値と下限値のばらつき予測値を求め、前記求めたばらつき予測値で修正される修正上限値と修正下限値の間に前記しきい値を設定する如く構成したので、ニュートラルセンサ32の製造ばらつきなどに起因して出力電圧Vの上下限値がばらつくときも、しきい値VTHRを、求めたばらつき予測値で修正される修正上限値と修正下限値の間に設定することで、ニュートラル位置の判定精度、即ち、ニュートラル位置にあるか否かの判定精度を向上させることができる。
【0086】
また、ニュートラルセンサ32の製造時などの公差の変更やセンサ特性の学習補正を不要としたので、製造コストの増大を招くことがないと共に、センサを二重系にすることもないので、構成の複雑化を招くこともない。
【0087】
さらに、製造ばらつきなどのセンサ固有のばらつきと動作電圧などのセンサ出力の変換ばらつきとに分類して予測することで、ばらつき予測値を遺漏なく求めることができ、よって予測値で修正される修正上下限値の間にしきい値を適切に設定することが可能となり、ニュートラル位置にあるか否かの判定精度を一層向上させることができる。
【0088】
その結果、例えばアイドリングストップ制御を行うときも、ニュートラル位置にあるか否かを精度良く判定できることから、エンジンの停止・再始動を適正に行うことができ、燃料消費量を低減することが可能となる。
【0089】
また、前記センサ出力変換ばらつきは、前記センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、前記動作電圧を供給する電源線(ワイヤ)52aで予測される電磁波ノイズとのうちの少なくともいずれかを含む如く構成したので、上記した効果に加え、ばらつき予測値を一層遺漏なく求めることができる。
【0090】
また、前記ECU(電子制御ユニット)50のマイクロコンピュータ50aは、前記センサ出力電圧Vが前記上限値と修正上限値の間にあるときは前記センサ出力電圧Vを前記上限値に、前記下限値と修正下限値の間にあるときは前記センサ出力電圧Vを前記下限値にクランプするようにプログラムされる如く構成したので、上記した効果に加え、製造時における管理が容易となる。即ち、出力電圧Vの上限値および下限値が固定値とされるために製造時の管理が容易となり、よって作業性を向上することができる。
【0091】
また、下限値は変速ギヤ、より具体的にはそのドグ歯が隣接する受け側に接触する境界を示す値となることから、ニュートラル位置にあるか否かを確実に判定することができる。
【0092】
また、前記センサ出力変換ばらつきは、前記センサ出力電圧Vを前記上限値または下限値にクランプするときのばらつきを含む如く構成、換言すれば、シフト部材等の構成部品の公差ばらつきを含む如く構成したので、上記した効果に加え、ニュートラル位置にあるか否かを一層確実に判定することができる。
【0093】
尚、この明細書において、変速機10は、機械式摩擦クラッチ16を備えれば足りることから、手動変速機に限定されるものではなく、運転者によるクラッチペダル操作に応じてアクチュエータの動作を制御して機械式摩擦クラッチ16を断接するようにしたCBW(Clutch by Wire)型などの変速機であっても良い。
【0094】
また、ニュートラルセンサ32はホール効果を応用するホールセンサから構成したが、それに限られるものではなく、他の磁電変換素子からなるセンサであっても良い。
【符号の説明】
【0095】
10 変速機(手動変速機)、10e 1速ドライブギヤ(変速ギヤ)、10f 2速ドライブギヤ(変速ギヤ),..,12 エンジン(内燃機関)、12a 駆動軸、14 車輪、16 クラッチ(機械式摩擦クラッチ)、16d スプリング、18 車両、20 クラッチペダル、20a クラッチペダルストロークセンサ、22 マスタシリンダ、24 レリーズシリンダ、24a ピストンロッド、24b レリーズフォーク、26 シフトレバー、30 シフト機構、30a 軸部材、30b シフトアーム、30b2 第2の突起(ターゲット)、30c シフトフォーク、32 ニュートラルセンサ、34 ブレーキペダル、34a ブレーキスイッチ、36 アクセルペダル、36a アクセル開度センサ、40,42 回転数センサ、44 クランク角センサ、46 絶対圧センサ、50 ECU(電子制御ユニット)、50a マイクロコンピュータ、52 バッテリ、52a ワイヤ(電源線)、54 レギュレータ
【技術分野】
【0001】
この発明は変速機ニュートラル位置判定装置に関し、より具体的には運転者によるクラッチペダル操作に応じてクラッチを断接する変速機を備えると共に、ニュートラルセンサの出力から変速ギヤがニュートラル位置にあるか否か判定するようにした装置に関する。
【背景技術】
【0002】
運転者のシフトレバー操作に応じて変速ギヤニュートラル位置からインギヤ位置に移動させるシフト部材を備えると共に、ニュートラルセンサの出力をしきい値と比較して変速ギヤがニュートラル位置にあるか否かを判定する技術は、例えば特許文献1記載の技術から知られている。
【0003】
特許文献1記載の技術は、シフトレバーのニュートラル位置におけるセンサ出力を学習し、それに応じて各シフト位置の判定領域を増減するように構成している。
【0004】
また、特許文献2記載の技術のように、変速機に同種構造のニュートラルスイッチを2個、並列に配置し、両者の出力が一致するか否かを判断してニュートラル位置にあるか否かを判定することも提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−173478号
【特許文献2】特開2008−302821号
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ニュートラルセンサは製造ばらつき、取り付けばらつき、環境・外乱による劣化などに起因して出力電圧の上下限値がばらつき、上下限値の間のしきい値設定に使用できる余裕代が減少し、その結果、センサ出力によってニュートラル位置にあるか否かを精度良く判定することができない。
【0007】
他方、ニュートラルセンサの製造時や取り付け時の公差を小さく設定する、あるいは特許文献1記載の学習補正の手法を流用して取り付け時のセンサ特性を学習補正すると、製造コストが増大する。また特許文献2記載の技術のようにセンサ(スイッチ)を二重化して相互の出力を監視することも考えられるが、追加のセンサが必要となって構成が複雑となる不都合がある。
【0008】
従って、この発明の目的は上記した課題を解決し、ニュートラルセンサの製造ばらつきなどに起因して出力電圧の上下限値がばらつくときも、製造コストの増大や構成の複雑化を招くことなく、ニュートラル位置の判定精度を向上させるようにした変速機ニュートラル位置判定装置を提供することにある。
【課題を解決するための手段】
【0009】
上記した課題を解決するために、請求項1にあっては、車両に搭載されるエンジンの出力を変速して車輪に伝達すると共に、変速ギヤを有する変速機と、前記エンジンの駆動軸と変速機の間に介挿され、運転者の操作に応じて前記エンジンの出力を前記変速機に伝達する機械式摩擦クラッチと、運転者の操作に応じて前記変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材と、前記シフト部材の付近の部位に取り付けられると共に、供給される動作電圧で規定される上限値と下限値の間で前記シフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサと、前記ニュートラルセンサの出力電圧Vをしきい値VTHと比較して前記変速ギヤがニュートラル位置にあるか否か判定するようにプログラムされたマイクロコンピュータからなる電子制御ユニットとを備えた変速機ニュートラル位置判定装置において、前記ニュートラルセンサについて予測される製造ばらつきと前記部位への取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと前記動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて前記上限値と下限値のばらつき予測値を求め、前記求めたばらつき予測値で修正される修正上限値と修正下限値の間に前記しきい値を設定する如く構成した。
【0010】
請求項2に係る変速機ニュートラル位置判定装置にあっては、前記センサ出力変換ばらつきは、前記センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、前記動作電圧を供給する電源線で予測される電磁波ノイズとのうちの少なくともいずれかを含む如く構成した。
【0011】
請求項3に係る変速機ニュートラル位置判定装置にあっては、前記電子制御ユニットのマイクロコンピュータは、前記センサ出力電圧Vが前記上限値と修正上限値の間にあるときは前記センサ出力電圧Vを前記上限値に、前記下限値と修正下限値の間にあるときは前記センサ出力電圧Vを前記下限値にクランプするようにプログラムされる如く構成した。
【0012】
請求項4に係る変速機ニュートラル位置判定装置にあっては、前記センサ出力変換ばらつきは、前記センサ出力電圧Vを前記上限値または下限値にクランプするときのばらつきを含む如く構成した。
【発明の効果】
【0013】
請求項1にあっては、運転者の操作に応じて変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材の付近の部位に取り付けられ、供給される動作電圧で規定される上限値と下限値の間でシフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサと、その出力電圧Vをしきい値VTHと比較して変速ギヤがニュートラル位置にあるか否か判定する電子制御ユニットとを備えた変速機ニュートラル位置判定装置において、ニュートラルセンサについて予測される製造ばらつきと取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて上限値と下限値のばらつき予測値を求め、求めたばらつき予測値で修正される修正上限値と修正下限値の間にしきい値を設定するように構成したので、ニュートラルセンサの製造ばらつきなどに起因して出力電圧の上下限値がばらつくときも、しきい値を、求めたばらつき予測値で修正される修正上限値と修正下限値の間に設定することで、ニュートラル位置の判定精度、即ち、ニュートラル位置にあるか否かの判定精度を向上させることができる。
【0014】
また、ニュートラルセンサの製造時などの公差の変更やセンサ特性の学習補正を不要としたので、製造コストの増大を招くことがないと共に、センサを二重系にすることもないので、構成の複雑化を招くこともない。
【0015】
さらに、製造ばらつきなどのセンサ固有のばらつきと動作電圧などのセンサ出力の変換ばらつきとに分類して予測することで、ばらつき予測値を遺漏なく求めることができ、よって予測値で修正される修正上下限値の間にしきい値を適切に設定することが可能となり、ニュートラル位置にあるか否かの判定精度を一層向上させることができる。
【0016】
その結果、例えばアイドリングストップ制御を行うときも、ニュートラル位置にあるか否かを精度良く判定できることから、エンジンの停止・再始動を適正に行うことができ、燃料消費量を低減することが可能となる。
【0017】
請求項2に係る変速機ニュートラル位置判定装置にあっては、センサ出力変換ばらつきは、センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、動作電圧を供給する電源線で予測される電磁波ノイズとのうちの少なくともいずれかを含む如く構成したので、上記した効果に加え、ばらつき予測値を一層遺漏なく求めることができる。
【0018】
請求項3に係る変速機ニュートラル位置判定装置にあっては、電子制御ユニットのマイクロコンピュータは、センサ出力電圧Vが上限値と修正上限値の間にあるときは上限値に、下限値と修正下限値の間にあるときは下限値にクランプするようにプログラムされる如く構成したので、上記した効果に加え、製造時における管理が容易となる。即ち、出力電圧Vの上限値および下限値が固定値とされるために製造時の管理が容易となり、よって作業性を向上することができる。
【0019】
また、下限値は変速ギヤ、より具体的にはそのドグ歯が隣接する受け側に接触する境界を示す値となることから、ニュートラル位置にあるか否かを確実に判定することができる。
【0020】
請求項4に係る変速機ニュートラル位置判定装置にあっては、センサ出力変換ばらつきは、センサ出力電圧Vを上限値または下限値にクランプするときのばらつきを含む如く構成、換言すれば、シフト部材等の構成部品の公差ばらつきを含む如く構成したので、上記した効果に加え、ニュートラル位置にあるか否かを一層確実に判定することができる。
【図面の簡単な説明】
【0021】
【図1】この発明の実施例に係る変速機ニュートラル位置判定装置を全体的に示す概略図である。
【図2】図1に示すシフト機構の、変速機の入出力軸の軸端から見た、説明側面図である。
【図3】図2に示すシフト機構の拡大説明上面図である。
【図4】図1に示す変速機ニュートラル位置判定装置としてのECUの構成を示すブロック図である。
【図5】図1に示すニュートラルセンサの出力電圧特性を示す説明図である。
【図6】図4に示すECUの動作を示すフロー・チャートである。
【図7】図1に示すニュートラルセンサの出力電圧特性を示す説明図で、この発明の特徴を示す説明図である。
【発明を実施するための形態】
【0022】
以下、添付図面を参照してこの発明に係る変速機ニュートラル位置判定装置を実施するための形態について説明する。
【実施例】
【0023】
図1はこの発明の実施例に係る変速機ニュートラル位置判定装置を全体的に示す概略図である。
【0024】
以下説明すると、符号10はエンジン(ENG)12の出力を入力して変速して車輪14に伝達する手動変速機(以下「変速機」という)を示す。変速機10は前進6速、後進(RVS)1速の変速ギヤ(速度段)、即ち、前進n速(n≧2。具体的にはn=6)の変速ギヤを有する。
【0025】
エンジン12は例えばガソリンを燃料とする火花点火式の内燃機関からなり、エンジン12の駆動軸(クランク軸)12aと変速機10の間には運転者の操作に応じてエンジン12の出力を変速機10に伝達する機械式摩擦クラッチ16が介挿される。エンジン12は車輪14などで部分的に示される車両18に搭載される。
【0026】
機械式摩擦クラッチ(以下「クラッチ」という)16はエンジン12の駆動軸12a、より正確には駆動軸12aに固定されたフライホイール12bに接触可能なドーナツ状のクラッチディスク(摩擦材)16aが円周上に貼り付けられたクラッチプレート16bと、その背後(フライホイール側)に配置される、クラッチディスク16aと同一形状のプレッシャプレート(摩擦材)16cと、その上に配置されるダイヤフラム状のスプリング16dを備える。
【0027】
クラッチディスク16a(とプレッシャプレート16c)は、スプリング16dによってエンジン12のフライホイール12bに押圧されることで締結してエンジンの出力を変速機10に伝達する。
【0028】
車両運転席の床面に運転者の操作自在に設けられるクラッチペダル20は公知のマスタシリンダ(油圧シリンダ)22とレリーズシリンダ24(油圧シリンダ)を介してクラッチ16に接続される。
【0029】
クラッチペダル20はピストンロッドを介してマスタシリンダ22の内部に摺動自在に収容されたピストンに連結される。マスタシリンダ22は配管を介してレリーズシリンダ24に接続されて油圧を給排する。レリーズシリンダ24の内部にもピストンが摺動自在に収容される。
【0030】
レリーズシリンダ24においてピストンはピストンロッド24aを備え、ピストンロッド24aはレリーズフォーク24bに連結される。レリーズフォーク24bは変速機ケース10dに固定されるレリーズピボット24cを介してクラッチ16のスプリング16dに連結される。
【0031】
運転者がクラッチペダル20を踏む(操作する)と、その踏み力はマスタシリンダ22からレリーズシリンダ24に油圧として伝えられ、踏み量に相当する距離だけレリーズシリンダ24のピストンロッド24aはストロークしてレリーズフォーク24bを前後方向に駆動する。
【0032】
図示の如く、レリーズピボット24cはレリーズフォーク24bの中央位置よりもクラッチ16に接近して配置されるので、そこを支点とするレリーズフォーク24bの移動は増力されてクラッチ16のスプリング16dに伝達され、スプリング16dを押圧してクラッチ16を開放位置に駆動する。
【0033】
他方、運転者がクラッチペダル20から足を離すと、クラッチ16(のクラッチプレート16b)はスプリング16dの付勢力によってエンジン12の駆動軸12aを伝達する締結位置に移動する。
【0034】
変速機10は、エンジン12の駆動軸12aに接続されてエンジン12の出力を入力する入力軸(メインシャフト)10aと、入力軸10aと平行に設けられると共に、車輪14に接続される出力軸(カウンタシャフト)10bを備える。入力軸10aと出力軸10bはベアリング10cを介して変速機ケース10dに回転自在に支承される。
【0035】
入力軸10aには1速ドライブギヤ10eと2速ドライブギヤ10fとRVS(後進)ドライブギヤ10gとが回転不能に配置されると共に、出力軸10bには3速ドライブギヤ10hと4速ドライブギヤ10iと5速ドライブギヤ10jと6速ドライブギヤ10kが回転不能に配置される。
【0036】
また、出力軸10bには1速ドライブギヤ10eと噛合する1速ドリブンギヤ10lと2速ドライブギヤ10fと噛合する2速ドリブンギヤ10mとが回転可能に配置されると共に、入力軸10aには3速ドライブギヤ10hと噛合する3速ドリブンギヤ10nと4速ドライブギヤ10iと噛合する4速ドリブンギヤ10oと5速ドライブギヤ10jと噛合する5速ドリブンギヤ10pと6速ドライブギヤ10kと噛合する6速ドリブンギヤ10qとが回転可能に配置される。
【0037】
さらに、RVS軸10rにはRVSドライブギヤ10gと噛合可能なRVSギヤ10sがRVS軸10rに対して回転不能に配置される。出力軸10bにはギヤ10tが出力軸10bに対して回転不能に配置される。
【0038】
ギヤ10tはギヤ10uを介してディファレンシャル機構10vに接続される。ディファレンシャル機構10vはドライブ軸10wを介して車輪14に接続される。
【0039】
入力軸10aと出力軸10bの付近には1−2速スリーブ10xと3−4速スリーブ10yと5−6速スリーブ10zとが配置される。
【0040】
他方、車両運転席には運転者の操作自在にシフトレバー26が配置される。シフトレバー26は、シフトアームやシフトピース(後述)などで規定されるシフトパターン26a内を運転者の操作に応じて移動自在に構成される。
【0041】
シフトパターン26aにおいて1−2,3−4,5−6速のそれぞれの中央位置n1,n2,n3がニュートラル位置N(1速ドライブギヤ10eなどの変速ギヤのいずれも入力軸10aにも出力軸10bにも固定されない(インギヤされない)位置)を示す。
【0042】
図示の如く、この明細書でシフトレバー26の前進1−6速とRのいずれかに向けての移動を「シフト」、ニュートラル位置n1,n2,n3が連続する方向に沿っての移動を「セレクト」という。
【0043】
シフトレバー26はシフト機構30を介して上記したスリーブ10x,10y,10zに機械的に接続される。
【0044】
図2はシフト機構30の、変速機10の入出力軸10a,10bの軸端から見た、説明側面図、図3はその拡大説明上面図である。図2、図3において図1に示したスリーブ10x,10y,10zなどの図示を省略した。
【0045】
図2に示す如く、シフト機構30は、軸部材30aと、軸部材30aに固定されると共に、鉄などの磁性体からなるシフトアーム30bと、シフトフォーク30cと、シフトアーム(シフト部材)30bとシフトフォーク30c(30c1,30c2などと示す)を連結するシフトピース30d(30d1,30d2などと示す)を備える。
【0046】
シフトフォーク30cは、1−2速スリーブ10xに係合される1−2速シフトフォーク30c1と、3−4速スリーブ10yに係合される3−4速シフトフォーク30c2と、5−6速スリーブ10zに係合される5−6速シフトフォーク30c3と、RVSギヤ10sに係合されるRシフトフォーク30c4(図示せず)からなる。4個のシフトフォークを30cnで総称する。
【0047】
シフトピース30dは、シフトフォーク30cを貫通してシフトフォーク30cに固定されるフォークシャフト30eに取り付けられるプレート状の部材からなり、1−2速シフトフォーク30c1に取り付けられる1−2速シフトピース30d1と、3−4速シフトフォーク30c2に取り付けられる3−4速シフトピース30d2と、5−6速シフトフォーク30c3に取り付けられる5−6速シフトピース30d3と、Rシフトフォーク30c4に取り付けられるRシフトピース30d4からなる。4個のシフトピースを30dnで総称する。
【0048】
図3に示す如く、4個のシフトピース30dnの他端側はそれぞれスパナ状に形成された係合部30dn1を有し、係合部30dn1はシフトアーム30bの突起30b1と係合し、よってシフトフォーク30cnを介して対応するスリーブ10x,10y,10zのいずれかを入力軸10aあるいは出力軸10bの軸方向に移動可能に構成される。
【0049】
軸部材30aは長軸30a1を有し、長軸30a1は一端側でシフトレバー30(図2などで図示省略)にロッドを介して連結されるリンク30a2に係合されて軸方向に移動(セレクト)可能であると共に、シフトレバー26にワイヤで連結される係止部30a3を介して長軸30a1の軸回り方向に回転(シフト)可能に構成される。
【0050】
図2に示す如く、シフトアーム30bは4個のシフトピース30dnのうちの3個と同程度の軸方向厚みを有すると共に、1個と同程度の軸方向厚みを有する突起30b1が形成される。
【0051】
即ち、シフト機構30においてシフトアーム30bは運転者によって操作されるシフトレバー26の動きに応じて軸部材30aを介して軸方向に移動(セレクト)させられて4個のシフトピース30dnの1個と常に係合すると共に、軸回り方向に移動(シフト)させられて係合する1個のシフトピースを入力軸10aあるいは出力軸10bの軸方向に移動(ギヤイン)させるように構成される。
【0052】
運転者によってクラッチペダル20が踏まれてクラッチ16が開放位置に操作されると共に、シフトレバー26が操作されると、それに応じてシフト機構30を介してスリーブ10x,10y,10zが図1で左右に移動させられて変速がなされる。
【0053】
例えば、シフトレバー26が1速位置に操作されると、それに応じて1−2速スリーブ10xは図1で左動して1速ドリブンギヤ10lを出力軸10bに固定する。
【0054】
その結果、1速段が確立され、エンジン12の出力はクラッチ16を介して入力軸10aに伝達され、1速ドライブギヤ10e、1速ドリブンギヤ10l、出力軸10b、ギヤ10t、ギヤ10u、ディファレンシャル機構10v、ドライブ軸10w、車輪14へと伝達され、車両を前進方向に走行させる。
【0055】
シフトレバー26が2速位置に操作されると、1−2速スリーブ10xは図1で右動して2速ドリブンギヤ10mを出力軸10bに固定する結果、2速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、2速ドライブギヤ10f、2速ドリブンギヤ10m、出力軸10b、ギヤ10tへと伝達される。
【0056】
シフトレバー26が3速位置に操作されると、3−4速スリーブ10yは図1で左動して3速ドリブンギヤ10nを入力軸10aに固定する結果、3速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、3速ドリブンギヤ10n、出力軸10b、3速ドライブギヤ10h、ギヤ10tへと伝達される。
【0057】
シフトレバー26が4速位置に操作されると、3−4速スリーブ10yは図1で右動して4速ドリブンギヤ10oを入力軸10aに固定する結果、4速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、4速ドリブンギヤ10o、4速ドライブギヤ10i、出力軸10b、ギヤ10tへと伝達される。
【0058】
シフトレバー26が5速位置に操作されると、5−6速スリーブ10zは図1で左動して5速ドリブンギヤ10pを入力軸10aに固定する結果、5速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、5速ドリブンギヤ10p、5速ドライブギヤ10j、出力軸10b、ギヤ10tへと伝達される。
【0059】
シフトレバー26が6速位置に操作されると、5−6速スリーブ10zは図1で右動して6速ドリブンギヤ10qを入力軸10aに固定する結果、6速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、6速ドリブンギヤ10q、6速ドライブギヤ10k、出力軸10b、ギヤ10tへと伝達される。
【0060】
シフトレバー26がR(RVS)位置に操作されると、RVSギヤ10sは図1で左動してRVSドライブギヤ10gと噛合する結果、後進1速段が確立され、エンジン12の出力はクラッチ16、入力軸10a、RVSドライブギヤ10g、RVSギヤ10q、1−2速スリーブ10x、出力軸10b、ギヤ10t、ギヤ10u、ディファレンシャル機構10v、ドライブ軸10w、車輪14へと伝達され、車両を後進方向に走行させる。
【0061】
図2と図3の説明に戻ると、シフトアーム30bにおいて、突起30b1の形成位置と反対側には4個のシフトフォーク30cと同程度の軸方向厚みを有する第2の突起30b2が形成される。以下、この第2の突起30b2を「ターゲット」という。
【0062】
ターゲット30b2の付近には、ニュートラルセンサ32が変速機ケース10d(図示省略。前記した「部位」)に固定され、変速機ケース10dの内部にMTF(変速機作動油)に曝されて配置される。図3に良く示す如く、シフトアーム30bは長軸30a1を中心として回転可能に構成されると共に、所定角度(例えば中央位置から左右に数度程度)の範囲がニュートラル位置を示すように構成される。
【0063】
ニュートラルセンサ32は磁界に比例したホール起電力を生じるホール素子を備え、シフトアーム30bの回転によるターゲット30b2の移動、換言すればシフトアーム30bとの離間距離に応じた出力を生じる。
【0064】
図1の説明に戻ると、車両18の運転席床面に配置されるクラッチペダル20の付近にはクラッチペダルスイッチ20aが配置され、運転者によってクラッチペダル20が操作される(踏まれる)度に信号を出力する。
【0065】
車両運転席床面にクラッチペダル20と並んで配設されるブレーキペダル34の付近にはブレーキスイッチ34aが配置されて運転者によってブレーキペダル34が踏まれる(ブレーキ操作される)度に信号を出力すると共に、アクセルペダル36の付近にはアクセル開度センサ36aが配置されて運転者によるアクセルペダル36の踏み込み量に応じたアクセル開度を示す出力を生じる。
【0066】
変速機10の入力軸10aの付近には第1の回転数センサ40が配置されて入力軸10aの回転数NMを示す出力を生じると共に、ドライブ軸10wの付近には第2の回転数センサ42が配置されてドライブ軸10wの回転数、即ち、車速を示す出力を生じる。
【0067】
エンジン12の駆動軸12aの付近にはクランク角センサ44が配置されてピストン(図示せず)の位置を通じてエンジン12の回転数NEを示す出力を生じると共に、吸気管(図示せず)には絶対圧センサ46が配置されてエンジン12の負荷を示す吸気管内絶対圧PBAを示す出力を生じる。
【0068】
上記したセンサ群の出力はECU(Electronic Control Unit。電子制御ユニット)50に入力される。ECU50はCPU,ROM,RAM,I/Oなどからなるマイクロコンピュータを備える。
【0069】
ECU50はクランク角センサ44、絶対圧センサ46などの出力に基づいてエンジン12の燃料供給、点火時期などの動作を制御すると共に、前記したニュートラルセンサ32の出力に基づいて変速ギヤがニュートラル位置にあるか否か判定する変速機のニュートラル位置判定装置としても機能する。
【0070】
図4は変速機ニュートラル位置判定装置としてのECU50の構成を示すブロック図である。
【0071】
前記した如く、ECU50はCPU50a1,ROM50a2,RAM50a3,I/O50a4などからなるマイクロコンピュータ50aを備えると共に、A/D変換回路50bを備え、ニュートラルセンサ32の出力はA/D変換回路50bでデジタル値に変換されてI/O50a4を介してRAM40cに格納される。
【0072】
ECU50は車両18に搭載される定格出力12Vのバッテリ52(図1で図示省略)からワイヤ(電源線)52aを介して3.3Vに降圧された動作電圧を供給されて動作する。ECU50はさらにレギュレータ54を備え、レギュレータ54の動作を制御し、バッテリ52から供給された電圧を5Vに降圧してニュートラルセンサ32に供給する。
【0073】
図5にニュートラルセンサ32の出力電圧特性を示す。ニュートラルセンサ32は本来的には、図示の如く、供給される動作電圧5Vで規定される上限値(例えば4.5V)と下限値(例えば0.5V)の間でシフトアーム30bの回転によるターゲット30b2との離間距離に応じた出力電圧Vを生じる。
【0074】
図6はECU50のニュートラル位置判定動作を示すフロー・チャートである。
【0075】
以下説明すると、S10においてニュートラルセンサ32の出力電圧Vをしきい値VTHと比較し、出力電圧Vがしきい値VTH以上か否か判断し、肯定されるときはS12に進んで変速ギヤ10e,10f,..がニュートラル位置にあると判定する一方、否定されるときはS14に進み、変速ギヤがインギヤ位置にあると判定する。
【0076】
このように、ECU50のマイクロコンピュータ50aは、ニュートラルセンサ32の出力電圧Vをしきい値VTHと比較して変速ギヤがニュートラル位置にあるか否か判定するようにプログラムされる。
【0077】
ここで、この発明の課題を再説すると、図5に示す上下限値は実際にはニュートラルセンサ32の製造ばらつきなどに起因してばらつき、ニュートラル位置にあるか否かを精度良く判定することができない。従って、この発明は、出力電圧Vの上下限値がばらつくときも、製造コストの増大や構成の複雑化を招くことなく、ニュートラル位置にあるか否かの判定精度を向上させるようにした変速機ニュートラル位置判定装置を提供することにある。
【0078】
その意図から、この実施例にあっては、図7に示す如く、ニュートラルセンサ32について予測される製造(出荷)ばらつきと変速機ケース(部位)10dへの取り付けばらつきと所定年(例えば10年)の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと、動作電圧5Vのばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて上限値(例えば4.5V)と下限値(例えば0.5V)のばらつき予測値(後述するa1からa9、およびb1からb8)を求め、求めたばらつき予測値で修正される修正上限値(図7で「A[V]」と示す)と修正下限値(図7で「B[V]」と示す)の間にしきい値VTHRを設定する如く構成した。
【0079】
即ち、センサ固有ばらつきは製造(出荷)ばらつきと取り付けばらつきと環境・外乱による劣化とを含み、上限値側にあっては、製造(出荷)ばらつきを±a1と予測する。
【0080】
取り付けばらつきとしてはエアギャップ(ニュートラルセンサ32とターゲット30b2との離間距離)のばらつきを−a2、センタズレ(ターゲット30b2の変速機ケース10dへの取り付けずれ)のばらつきを−a3と予測する。
【0081】
環境・外乱による劣化としてはMTFに混入される鉄粉などによる所定年(例えば10年)にわたる汚染に起因するばらつきを±a4、環境温度、即ち、車両18が位置する場所の外気温度によるMTFの粘性の変化によるばらつきを±a5と予測する。
【0082】
センサ出力変換ばらつきとしては、ECU50のレギュレータ54の降圧を制御するときの動作(供給)電圧のばらつきとして±a6、ECU50のA/D変換回路50eを介してデジタル値に変換されたニュートラルセンサ32の出力の読み込みのときのばらつきとして±a7、またワイヤ(電源線)52aでの電磁波ノイズによるばらつきとして±a8を予測する。
【0083】
さらに、ECU50は、図7に示す如く、センサ出力電圧Vが上限値と修正上限値の間にあるときはセンサ出力電圧Vを上限値に、下限値と修正下限値の間にあるときはセンサ出力電圧Vを下限値にクランプするようにプログラムされるが、センサ出力変換ばらつきとしてそのセンサ出力電圧Vを上限値または下限値にクランプするときのばらつきを含むと共に、その値を±a9と予測する。尚、上記した上限値側ばらつきa1,a2などは具体的には電圧Vで示される。
【0084】
また、下限値側にあっても同様に、各ばらつきをそれぞれb1からb8と予測する。下限値側ばらつきb1,b2なども上限値側ばらつきa1,a2などと同様、具体的には電圧Vで示される。尚、下限値側のばらつきb1からb8はインギヤ判定に関する値であり、センサ32のターゲット30b2の中心位置からのずれによるばらつき(図7でセンタズレと示す)は発生しない。
【0085】
上記した如く、この実施例にあっては、車両18に搭載されるエンジン12の出力を変速して車輪14に伝達すると共に、変速ギヤ10e,10f,..を有する変速機10と、前記エンジン12の駆動軸12aと変速機10の間に介挿され、運転者の操作に応じて前記エンジン12の出力を前記変速機10に伝達する機械式摩擦クラッチ16と、運転者の操作に応じて前記変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材(シフトアーム)30bと、前記シフト部材の付近の部位に取り付けられると共に、供給される動作電圧で規定される上限値と下限値の間で前記シフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサ32と、前記ニュートラルセンサの出力電圧Vをしきい値VTHと比較して前記変速ギヤがニュートラル位置にあるか否か判定(検出)するようにプログラムされたマイクロコンピュータ50aからなるECU(電子制御ユニット)50とを備えた変速機ニュートラル位置判定装置において、前記ニュートラルセンサ32について予測される製造ばらつきと前記部位への取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと前記動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて前記上限値と下限値のばらつき予測値を求め、前記求めたばらつき予測値で修正される修正上限値と修正下限値の間に前記しきい値を設定する如く構成したので、ニュートラルセンサ32の製造ばらつきなどに起因して出力電圧Vの上下限値がばらつくときも、しきい値VTHRを、求めたばらつき予測値で修正される修正上限値と修正下限値の間に設定することで、ニュートラル位置の判定精度、即ち、ニュートラル位置にあるか否かの判定精度を向上させることができる。
【0086】
また、ニュートラルセンサ32の製造時などの公差の変更やセンサ特性の学習補正を不要としたので、製造コストの増大を招くことがないと共に、センサを二重系にすることもないので、構成の複雑化を招くこともない。
【0087】
さらに、製造ばらつきなどのセンサ固有のばらつきと動作電圧などのセンサ出力の変換ばらつきとに分類して予測することで、ばらつき予測値を遺漏なく求めることができ、よって予測値で修正される修正上下限値の間にしきい値を適切に設定することが可能となり、ニュートラル位置にあるか否かの判定精度を一層向上させることができる。
【0088】
その結果、例えばアイドリングストップ制御を行うときも、ニュートラル位置にあるか否かを精度良く判定できることから、エンジンの停止・再始動を適正に行うことができ、燃料消費量を低減することが可能となる。
【0089】
また、前記センサ出力変換ばらつきは、前記センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、前記動作電圧を供給する電源線(ワイヤ)52aで予測される電磁波ノイズとのうちの少なくともいずれかを含む如く構成したので、上記した効果に加え、ばらつき予測値を一層遺漏なく求めることができる。
【0090】
また、前記ECU(電子制御ユニット)50のマイクロコンピュータ50aは、前記センサ出力電圧Vが前記上限値と修正上限値の間にあるときは前記センサ出力電圧Vを前記上限値に、前記下限値と修正下限値の間にあるときは前記センサ出力電圧Vを前記下限値にクランプするようにプログラムされる如く構成したので、上記した効果に加え、製造時における管理が容易となる。即ち、出力電圧Vの上限値および下限値が固定値とされるために製造時の管理が容易となり、よって作業性を向上することができる。
【0091】
また、下限値は変速ギヤ、より具体的にはそのドグ歯が隣接する受け側に接触する境界を示す値となることから、ニュートラル位置にあるか否かを確実に判定することができる。
【0092】
また、前記センサ出力変換ばらつきは、前記センサ出力電圧Vを前記上限値または下限値にクランプするときのばらつきを含む如く構成、換言すれば、シフト部材等の構成部品の公差ばらつきを含む如く構成したので、上記した効果に加え、ニュートラル位置にあるか否かを一層確実に判定することができる。
【0093】
尚、この明細書において、変速機10は、機械式摩擦クラッチ16を備えれば足りることから、手動変速機に限定されるものではなく、運転者によるクラッチペダル操作に応じてアクチュエータの動作を制御して機械式摩擦クラッチ16を断接するようにしたCBW(Clutch by Wire)型などの変速機であっても良い。
【0094】
また、ニュートラルセンサ32はホール効果を応用するホールセンサから構成したが、それに限られるものではなく、他の磁電変換素子からなるセンサであっても良い。
【符号の説明】
【0095】
10 変速機(手動変速機)、10e 1速ドライブギヤ(変速ギヤ)、10f 2速ドライブギヤ(変速ギヤ),..,12 エンジン(内燃機関)、12a 駆動軸、14 車輪、16 クラッチ(機械式摩擦クラッチ)、16d スプリング、18 車両、20 クラッチペダル、20a クラッチペダルストロークセンサ、22 マスタシリンダ、24 レリーズシリンダ、24a ピストンロッド、24b レリーズフォーク、26 シフトレバー、30 シフト機構、30a 軸部材、30b シフトアーム、30b2 第2の突起(ターゲット)、30c シフトフォーク、32 ニュートラルセンサ、34 ブレーキペダル、34a ブレーキスイッチ、36 アクセルペダル、36a アクセル開度センサ、40,42 回転数センサ、44 クランク角センサ、46 絶対圧センサ、50 ECU(電子制御ユニット)、50a マイクロコンピュータ、52 バッテリ、52a ワイヤ(電源線)、54 レギュレータ
【特許請求の範囲】
【請求項1】
車両に搭載されるエンジンの出力を変速して車輪に伝達すると共に、変速ギヤを有する変速機と、前記エンジンの駆動軸と変速機の間に介挿され、運転者の操作に応じて前記エンジンの出力を前記変速機に伝達する機械式摩擦クラッチと、運転者の操作に応じて前記変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材と、前記シフト部材の付近の部位に取り付けられると共に、供給される動作電圧で規定される上限値と下限値の間で前記シフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサと、前記ニュートラルセンサの出力電圧Vをしきい値VTHと比較して前記変速ギヤがニュートラル位置にあるか否か判定するようにプログラムされたマイクロコンピュータからなる電子制御ユニットとを備えた変速機ニュートラル位置判定装置において、前記ニュートラルセンサについて予測される製造ばらつきと前記部位への取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと前記動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて前記上限値と下限値のばらつき予測値を求め、前記求めたばらつき予測値で修正される修正上限値と修正下限値の間に前記しきい値を設定するようにしたことを特徴とする変速機ニュートラル位置判定装置。
【請求項2】
前記センサ出力変換ばらつきは、前記センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、前記動作電圧を供給する電源線で予測される電磁波ノイズとのうちの少なくともいずれかを含むことを特徴とする請求項1記載の変速機ニュートラル位置判定装置。
【請求項3】
前記電子制御ユニットのマイクロコンピュータは、前記センサ出力電圧Vが前記上限値と修正上限値の間にあるときは前記センサ出力電圧Vを前記上限値に、前記下限値と修正下限値の間にあるときは前記センサ出力電圧Vを前記下限値にクランプするようにプログラムされることを特徴とする請求項1または2記載の変速機ニュートラル位置判定装置。
【請求項4】
前記センサ出力変換ばらつきは、前記センサ出力電圧Vを前記上限値または下限値にクランプするときのばらつきを含むことを特徴とする請求項3記載の変速機ニュートラル位置判定装置。
【請求項1】
車両に搭載されるエンジンの出力を変速して車輪に伝達すると共に、変速ギヤを有する変速機と、前記エンジンの駆動軸と変速機の間に介挿され、運転者の操作に応じて前記エンジンの出力を前記変速機に伝達する機械式摩擦クラッチと、運転者の操作に応じて前記変速ギヤをニュートラル位置とインギヤ位置の間で移動させるシフト部材と、前記シフト部材の付近の部位に取り付けられると共に、供給される動作電圧で規定される上限値と下限値の間で前記シフト部材との離間距離に応じた出力電圧Vを生じるニュートラルセンサと、前記ニュートラルセンサの出力電圧Vをしきい値VTHと比較して前記変速ギヤがニュートラル位置にあるか否か判定するようにプログラムされたマイクロコンピュータからなる電子制御ユニットとを備えた変速機ニュートラル位置判定装置において、前記ニュートラルセンサについて予測される製造ばらつきと前記部位への取り付けばらつきと所定年の間に生じる環境・外乱による劣化とから少なくともなるセンサ固有ばらつきと前記動作電圧のばらつきを少なくとも含むセンサ出力変換ばらつきとに基づいて前記上限値と下限値のばらつき予測値を求め、前記求めたばらつき予測値で修正される修正上限値と修正下限値の間に前記しきい値を設定するようにしたことを特徴とする変速機ニュートラル位置判定装置。
【請求項2】
前記センサ出力変換ばらつきは、前記センサ出力電圧Vをデジタル値に変換するときに生じると予測されるAD変換ばらつきと、前記動作電圧を供給する電源線で予測される電磁波ノイズとのうちの少なくともいずれかを含むことを特徴とする請求項1記載の変速機ニュートラル位置判定装置。
【請求項3】
前記電子制御ユニットのマイクロコンピュータは、前記センサ出力電圧Vが前記上限値と修正上限値の間にあるときは前記センサ出力電圧Vを前記上限値に、前記下限値と修正下限値の間にあるときは前記センサ出力電圧Vを前記下限値にクランプするようにプログラムされることを特徴とする請求項1または2記載の変速機ニュートラル位置判定装置。
【請求項4】
前記センサ出力変換ばらつきは、前記センサ出力電圧Vを前記上限値または下限値にクランプするときのばらつきを含むことを特徴とする請求項3記載の変速機ニュートラル位置判定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−100843(P2013−100843A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−243633(P2011−243633)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]