
変速装置
【課題】検出した負荷トルクが所定の値より若干低い状態で継続して使用した場合であっても、減速機構部の減速比を切り替えでき、これによりモータの急激な温度上昇を防止して作業性を確保できる変速装置を提案すること。
【解決手段】本発明の変速装置は、モータ1と、減速機構部2と、減速比切替手段とを具備する。減速比切替手段が、減速比を切り替えるための切替用アクチュエータ6と、切替用アクチュエータ6を制御する制御部60と、モータ1にかかる負荷トルクの指標となる指標値を検知する駆動状態検知部68とを有する。制御部60は、指標値が第一の閾値を過ぎた第一の場合と、指標値が第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ繰り返しパターンが所定の条件を満たす第二の場合に、切替用アクチュエータ6を起動させる制御を行う。
【解決手段】本発明の変速装置は、モータ1と、減速機構部2と、減速比切替手段とを具備する。減速比切替手段が、減速比を切り替えるための切替用アクチュエータ6と、切替用アクチュエータ6を制御する制御部60と、モータ1にかかる負荷トルクの指標となる指標値を検知する駆動状態検知部68とを有する。制御部60は、指標値が第一の閾値を過ぎた第一の場合と、指標値が第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ繰り返しパターンが所定の条件を満たす第二の場合に、切替用アクチュエータ6を起動させる制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動工具に好適に装着される減速比の切り替えを行うための変速装置に関するものである。
【背景技術】
【0002】
従来から、特許文献1等によって、減速比を切り替えることができる減速機構部を備えた電動工具において、モータにかかる負荷トルクの大小に応じて減速機構部の減速比を自動的に切り替えるものが提案されている。
【0003】
この電動工具では、負荷トルクの検出をモータ電流値から行っており、この検出したモータ電流値が所定の値より高い状態が一定時間継続した場合に、減速機構部の減速比を切り替えてモータの回転速度を落とし、これによりモータの急激な温度上昇を防止する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−56590号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述した電動工具では、検出したモータ電流値が所定の値よりも若干低い状態で継続して使用した場合、減速機構部の減速比の切り替えが行われず、モータの温度が急激に上昇して工具本体が熱くなり、作業性が低下するおそれがある。
【0006】
そこで上記事情を鑑みて、本発明では、検出した負荷トルクが所定の値より若干低い状態で継続して使用した場合であっても、減速機構部の減速比を切り替えでき、これによりモータの急激な温度上昇を防止して作業性を確保できる変速装置を提案することを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明の変速装置は、モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、を具備し、前記減速比切替手段が、前記減速比を切り替えるための切替用アクチュエータと、前記切替用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、前記制御部は、前記指標値が第一の閾値を過ぎた第一の場合に、前記切替用アクチュエータを起動させる制御を行うとともに、前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記繰り返しパターンが所定の条件を満たす第二の場合に、前記切替用アクチュエータを起動させる制御を行うことを特徴とする。
【0008】
また、前記第二の場合とは、前記繰り返しパターンが安定した時点から一定時間経過した場合であることが好ましい。
【0009】
あるいは、前記第二の場合とは、前記繰り返しパターンの増減が入れ替わる回数が所定の回数に達した場合であることが好ましい。
【0010】
あるいは、前記第二の場合とは、前記繰り返しパターンを時間で積分した積分値が所定の積分値に達した場合であることが好ましい。
【0011】
また、前記指標値は、モータ電流値であることが好ましい。
【0012】
あるいは、前記指標値は、モータ回転数であることが好ましい。
【0013】
あるいは、前記指標値は、前記モータの駆動状態を示す2つ以上の変数により決定されたものであることが好ましい。
【0014】
また、上記課題を解決するために本発明の変速装置は、モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、モータ温度を検知する温度センサとを具備し、前記減速比切替手段が、前記減速比を切り替えるための減速用アクチュエータと、前記減速用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、前記制御部は、前記指標値が第一の閾値を過ぎた場合に、前記切替用アクチュエータを起動させる制御を行うとともに、前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記温度センサで検知した前記モータ温度が、前記モータが異常発熱状態となる所定温度に達した場合に、前記減速用アクチュエータを起動させる制御を行うことを特徴とする。
【発明の効果】
【0015】
本発明の変速装置は、検出した負荷トルクが所定の値より若干低い状態で継続して使用した場合であっても、減速機構部の減速比を切り替えでき、これによりモータの急激な温度上昇を防止して作業性を確保できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第一実施形態の変速装置の説明図である。
【図2】同上の変速装置を備えた電動工具の要部の側断面図である。
【図3】同上の電動工具の要部の内部側面図である。
【図4】同上の変速装置の高速モードと低速モードにおける時間当たりの負荷トルクの変化の説明図である。
【図5】同上の変速装置における減速比の切り替わりの説明図である。
【図6】本発明の第二実施形態の変速装置における減速比の切り替わりの説明図である。
【図7】本発明の第三実施形態の変速装置における減速比の切り替わりの説明図である。
【発明を実施するための形態】
【0017】
本発明を、添付図面に示す実施形態に基づいて説明する。
【0018】
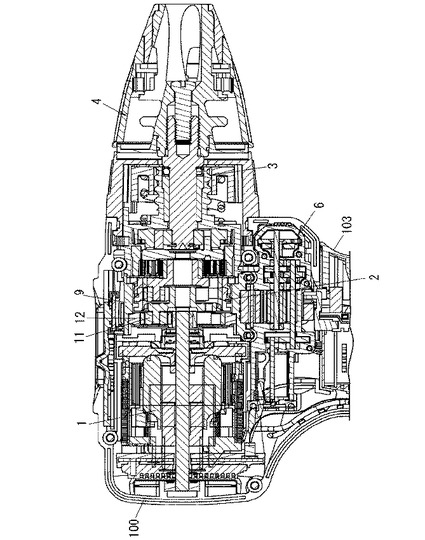
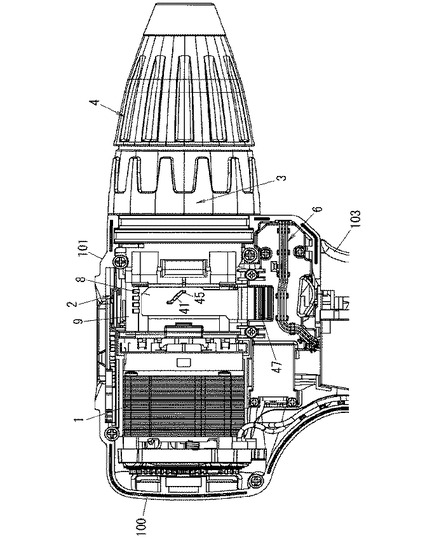
図2及び図3は、本発明の第一実施形態の変速装置が装着された電動工具の一例を示すもので、ハウジング100の後端部内に駆動源としてのモータ1が配置されており、このモータ1の出力は、減速機構部2と駆動伝達部3とを介して出力軸4に伝達される。モータ1は、ハウジング100の把持部に備えたトリガースイッチ103を操作することで回転駆動される。
【0019】
減速機構部2は、3段の遊星機構を軸方向に直列に並べたもので、その2段目の遊星機構におけるリングギア12は軸方向に移動可能となっており、図中の左方に移動させた場合には一段目の遊星機構のキャリア11外周面に設けられた歯と噛み合い、右方に移動させた場合にはギアケース9内周面に設けられた歯と噛み合う。つまり、リングギア12を左方に動かした場合には、2段目の遊星機構が減速輪列として機能せずに1段目の遊星機構が3段目の遊星機構に直結された状態となって、高速低トルクの回転が出力軸4に伝達される。そして、リングギア12を右方に動かした場合には、2段目の遊星機構が減速輪列として機能することになって、低速高トルク回転が出力軸4に伝達される。
【0020】
減速比の切り替えは、回転型の切替用アクチュエータ6と、この切替用アクチュエータ6の回転がギア47を介して伝達されることで回転する変速リング8とによってなされる。この変速リング8は、その軸周りの回転に加えて軸方向移動も可能となっている。そして、変速リング8は、リングギア12に連結されており、さらにギアケース9から突出するピン45と係合するカム溝41を備えている。切替用アクチュエータ6の回転で変速リング8が回転するとき、ピン45とカム溝41とのガイドによって軸方向に移動し、この軸方向移動に伴ってリングギア12も軸方向移動を行うことで変速が行われる。
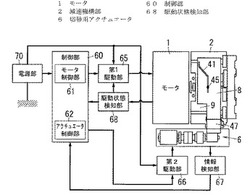
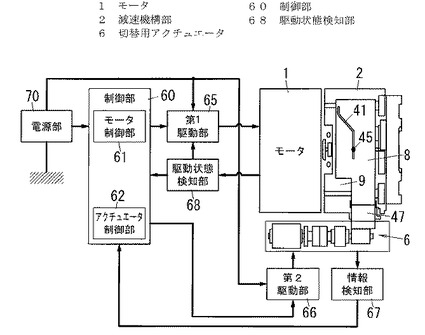
【0021】
図1には、上述した電動工具のブロック図を示す。図中60は、第1駆動部65を介してモータ1を駆動するモータ制御部61と、第2駆動部66を介して切替用アクチュエータ6の回転を制御するアクチュエータ制御部62とを備えた制御部である。そして、図中70は電源部である。モータ1の回転及び切替用アクチュエータ6の回転はそれぞれ、駆動状態検知部68及び情報検知部67によって制御部60にフィードバックされる。この切替用アクチュエータ6と、第2駆動部66と、駆動状態検知部68と、制御部60とによって減速比切替手段の主体が構成されている。
【0022】
駆動状態検知部68は、モータ1にかかる負荷トルクの指標となる指標値を検知する。本実施形態では、この指標値はモータ1に流れるモータ電流値となっている。なお、指標値はモータ1のモータ回転数であってもかまわない。また、指標値は、モータ1の駆動状態を示す2つ以上の変数(例えば、モータ電流値とモータ回転数)により決定されるものであってもかまわない。また、駆動状態検知部68によりモータ1にかかる負荷トルクを直接検知するようにして、指標値を負荷トルクとしてもよい。
【0023】
トリガースイッチ103をON操作することで、制御部60は、減速機構部2における減速比を小の状態にセットした状態でモータ1を起動させる。そして、制御部60は、駆動状態検知部68により検知されるモータ1の駆動状態に応じて、第2駆動部66を介して切替用アクチュエータ6を起動させ、リングギア12を軸方向移動させることにより減速機構部2の減速比を大に変更する自動変速制御を行う。なお、自動変速制御は、トリガースイッチ103がON操作されている状態で行われる。
【0024】
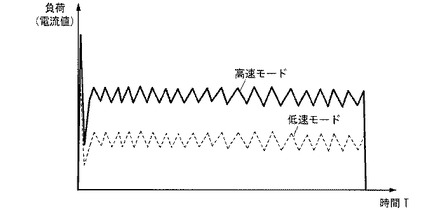
上述した電動工具によって、ドリル穴あけ作業のようなドリル刃の回転動作により対象部材を切削する作業を行う場合、図4に示すように、モータ1のモータ電流値が、所定時間経過後、略一定の幅の増減を繰り返す。なお、図中の高速モードは、減速機構部2の減速比が小の場合のモータ電流値を示し、図中の低速モードは、減速機構部2の減速比が大の場合のモータ電流値を示す。
【0025】
高速モードによって切削作業を行うと、電動工具の刃と対象部材との噛み込みにより、駆動状態検知部68によって検知したモータ電流値が、第一の閾値L1よりも大きい状態が所定時間継続する場合(第一の場合)がある。第一の閾値L1は、モータ1が過負荷状態となる基準値である。
【0026】
このような場合に、本実施形態の変速装置では、制御部60によって切替用アクチュエータ6を起動させて減速機構部2の減速比を大に変更する自動変速制御が行われる。これにより、モータ1への負担を減少させて、モータ1の温度が急激に上昇することを防止している。
【0027】
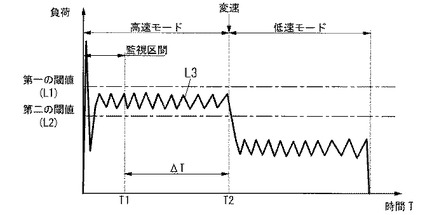
加えて本実施形態では、図5に示すように、検知したモータ電流値が、第一の閾値L1と第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、この繰り返しパターンL3が所定の条件を満たす場合(第二の場合)にも、上述の自動変速制御が行われる。この第一の閾値L1と第二の閾値L2との間の範囲は、継続使用した際にモータ1の温度が急激に上昇する恐れのある過負荷範囲を示す。なお、本実施形態では、指標値として負荷トルクに比例するモータ電流値を用いているため、第二の閾値L2は第一の閾値L1よりも小さい値となっている。ここで、指標値として負荷トルクに反比例するモータ回転数を用いた場合、第二の閾値L2は第一の閾値L1よりも大きい値となる。
【0028】
上述の繰り返しパターンL3が所定の条件を満たす第二の場合とは、本実施形態では、第一の閾値L1と第二の閾値L2との間で繰り返しパターンL3が安定した時点から一定時間ΔT経過した場合を示す。この繰り返しパターンL3が安定した時点とは、本実施形態では、モータ1の駆動開始(T=0)からT1秒後の、モータ電流値の増減幅が安定しない監視区間を経過した時点T1を示す。時点T1では、繰り返しパターンL3は、第一の閾値L1と第二の閾値L2との間で略一定の幅で増減を繰り返す。
【0029】
つまり、本実施形態では、第一の閾値L1と第二の閾値L2との間で繰り返しパターンL3が安定した時点T1から一定時間ΔT経過後の時点T2において、上述の自動変速制御が行われる。
【0030】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができる。これにより、工具本体の発熱を抑制して作業性を確保することができる。また、本実施形態では、時間経過を自動変速制御を行うための条件とすることで、モータ電流値の検知を時点T1以降継続しなくともよく、切替用アクチュエータ6の自動変速制御にモータ電流値の検出誤差が影響されないものとなっている。
【0031】
次に、本発明の変速装置の他の実施形態について順に説明する。なお、上述した第一実施形態と同様の構成については詳しい説明を省略し、第一実施形態とは相違する構成について、主に詳述する。
【0032】
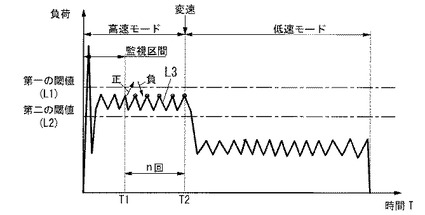
第二実施形態では、図6に示すように、上述した繰り返しパターンL3が所定の条件を満たす第二の場合が、繰り返しパターンL3の増減が入れ替わる回数が所定回数nに達した場合である。つまり、第二実施形態では、監査区間が経過した時点T1以降の繰り返しパターンL3の増減が正から負へと入れ替わる山の数をカウントして、その数が所定回数nに達したときに、上述の自動変速制御が行われる。なお、時点T1以降の繰り返しパターンL3の増減が負から正へと入れ替わる谷の数をカウントして、その数が所定回数nに達したときに、上述の自動変速制御が行われるようにしてもかまわない。第二実施形態では、検出したモータ電流値がフィードバックされる制御部60によって、入れ替わる回数をカウントする。
【0033】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができ、作業性を確保できる。また、本実施形態では、作業回数がカウント数で固定されているため作業者に対して工具の反力が安定して作用し、作業性の良いものとなっている。また、本実施形態では、繰り返しパターンL3の増減が入れ替わる回数をカウントするようにしたことで、切替用アクチュエータ6の自動変速制御にモータ電流値の増減幅の検出誤差が影響されなくなる。
【0034】
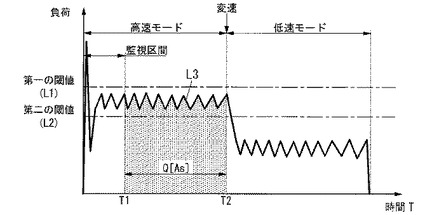
続いて第三実施形態では、図7に示すように、上述した繰り返しパターンL3が所定の条件を満たす第二の場合が、時点T1から形成される繰り返しパターンL3を時間で積分した積分値が所定積分値Qに達した場合であり、この場合に上述の自動変速制御が行われる。第三の実施形態では、検出したモータ電流値がフィードバックされる制御部60によって、積分値をカウントする。
【0035】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができ、作業性を確保できる。また、本実施形態では、作業回数がカウント数(積分値)で固定されているため作業者に対して工具の反力が安定して作用し、作業性の良いものとなっている。また、本実施形態では、繰り返しパターンL3の積分値をカウントするようにしたことで、モータ電流値の増減に応じたより確実なモータ1の負荷状態の検出を行うことができる。これにより、例えばモータ電流値が第二の閾値L2よりも若干大きい値で停滞する場合には、モータ電流値が第一の閾値L1よりも若干小さい値で停滞する場合と比べて、高速モードによる作業を長く続けることができる。
【0036】
なお、第一乃至第三実施形態における所定の条件を組み合わせたものを第二の場合としてもかまわない。
【0037】
続いて、第四実施形態について説明する。第四実施形態では、駆動状態検知部68で検知したモータ電流値が、第一の閾値L1と第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、モータ温度が、モータ1が異常発熱状態となる所定温度Bに達した場合に、上述の自動変速制御が行われる。なお、モータ温度は、変速装置に備える温度センサによって検知される。
【0038】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができ、作業性を確保できる。また、本実施形態では、自動変速制御を行うために、モータ1の温度を直接検知するようにしたことで、モータ1の負荷状態を直接検知できて、切替用アクチュエータ6の自動変速制御をより的確に行うことができる。よってモータ1への負担の減少を確実に行える。
【0039】
以上まとめると、第一乃至第三実施形態の変速装置は、モータ1を駆動源とし、モータ1の回転動力を減速したうえで伝達する減速機構部2と、この減速機構部2の減速比を切り替える減速比切替手段と、を具備する。減速比切替手段が、減速比を切り替えるための切替用アクチュエータ6と、切替用アクチュエータ6を制御する制御部60と、モータ1にかかる負荷トルクの指標となる指標値を検知する駆動状態検知部68とを有する。制御部60は、指標値が第一の閾値L1を過ぎた第一の場合に、切替用アクチュエータ6を起動させる制御を行う。そして、制御部60は、指標値が第一の閾値L1とこれとは別の第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、且つ繰り返しパターンL3が所定の条件を満たす第二の場合に、切替用アクチュエータ6を起動させる制御を行う。
【0040】
このような構成とすることで、第一乃至第三実施形態の変速装置では、検知した指標値が第一の閾値L1を過ぎた場合だけでなく、第一の閾値L1と第二の閾値L2との間の場合であっても、切替用アクチュエータ6を起動させて、モータ1の出力を弱めることができる。すなわち、検出した指標値が所定の値より若干低い状態で継続して使用した場合であっても、減速機構部2の減速比を切り替えでき、これによりモータ1の急激な温度上昇を防止して作業性を確保できる。
【0041】
また、第一実施形態の変速装置では、前記第二の場合とは、繰り返しパターンL3が安定した時点から一定時間ΔT経過した場合である。
【0042】
このようにすることで、第一実施形態の変速装置では、繰り返しパターンL3が安定して形成されたことを確認した後では、指標値の検知を継続しなくともよく、切替用アクチュエータ6の自動変速制御に指標値の検出誤差が影響されないものとなっている。
【0043】
また、第二実施形態の変速装置では、第二の場合とは、繰り返しパターンL3の増減が入れ替わる回数が所定回数nに達した場合であり、第三実施形態の変速装置では、第二の場合とは、繰り返しパターンL3を時間で積分した積分値が所定積分値Qに達した場合である。
【0044】
このようにすることで、作業回数がカウント数で固定されているため作業者に対して工具の反力が安定して作用し、作業性の良いものとなっている。
【0045】
また、第一乃至第四実施形態の変速装置では、指標値は、モータ電流値であることが好ましい。
【0046】
このようにすることで、モータ1にかかる負荷トルクを正確に検出でき、この正確な検出を安価な回路構成で実現できる。
【0047】
また、第一乃至第四実施形態の変速装置では、指標値は、モータ回転数であることが好ましい。
【0048】
このようにすることで、指標値がモータ電流値である場合のようにモータ電流値を検知するための電流検知回路によるノイズの影響を受けなくてすみ、モータ1にかかる負荷トルクを正確に検出できる。
【0049】
また、第一乃至第四実施形態の変速装置では、指標値は、前記モータの駆動状態を示す2つ以上の変数により決定されたものであることが好ましい。
【0050】
このようにすることで、部品ばらつきによる閾値のばらつきの影響が小さくなり、指標値が高精度なものとなり、より安定した作業性の確保を図ることができる。
【0051】
また、第四実施形態の変速装置は、モータ1を駆動源とし、モータ1の回転動力を減速したうえで伝達する減速機構部2と、この減速機構部2の減速比を切り替える減速比切替手段と、モータ温度を検知する温度センサとを具備する。減速比切替手段が、減速比を切り替えるための切替用アクチュエータ6と、切替用アクチュエータ6を制御する制御部60と、モータ1にかかる負荷トルクの指標となる指標値を検知する駆動状態検知部68とを有する。制御部60は、指標値が第一の閾値L1を過ぎた第一の場合に、切替用アクチュエータ6を起動させる制御を行う。そして、制御部60は、指標値が第一の閾値L1とこれとは別の第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、且つ前記温度センサで検知した前記モータ温度が、モータ1が異常発熱状態となる所定温度に達した場合に、切替用アクチュエータ6を起動させる制御を行う。
【0052】
このような構成とすることで、第四実施形態の変速装置では、検知した指標値が第一の閾値L1を過ぎた場合だけでなく、第一の閾値L1と第二の閾値L2との間の場合であっても、切替用アクチュエータ6を起動させて、モータ1の出力を弱めることができる。ここで、第四実施形態の変速装置では、モータ1のモータ温度を温度センサにより検出するようにしたことで、モータ1が異常発熱状態となる所定温度に達したかどうかを直接検知できるので検知精度が高いものとなっている。したがって、第四実施形態の変速装置では、検出した指標値が所定の値より若干低い状態で継続して使用した場合であっても、減速機構部2の減速比を切り替えでき、これによりモータ1の急激な温度上昇を防止して作業性を確保できる。
【0053】
以上、本発明を添付図面に示す実施形態に基づいて説明したが、本発明は上記の各実施形態に限定されるものではなく、本発明の意図する範囲内であれば、適宜の設計変更が可能である。なお、本発明の変速装置は、電動工具用に限定されない。
【符号の説明】
【0054】
1 モータ
2 減速機構部
6 切替用アクチュエータ
60 制御部
68 駆動状態検知部
ΔT 一定時間
n 所定回数
Q 所定積分値
L1 第一の閾値
L2 第二の閾値
L3 繰り返しパターン
【技術分野】
【0001】
本発明は、電動工具に好適に装着される減速比の切り替えを行うための変速装置に関するものである。
【背景技術】
【0002】
従来から、特許文献1等によって、減速比を切り替えることができる減速機構部を備えた電動工具において、モータにかかる負荷トルクの大小に応じて減速機構部の減速比を自動的に切り替えるものが提案されている。
【0003】
この電動工具では、負荷トルクの検出をモータ電流値から行っており、この検出したモータ電流値が所定の値より高い状態が一定時間継続した場合に、減速機構部の減速比を切り替えてモータの回転速度を落とし、これによりモータの急激な温度上昇を防止する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−56590号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述した電動工具では、検出したモータ電流値が所定の値よりも若干低い状態で継続して使用した場合、減速機構部の減速比の切り替えが行われず、モータの温度が急激に上昇して工具本体が熱くなり、作業性が低下するおそれがある。
【0006】
そこで上記事情を鑑みて、本発明では、検出した負荷トルクが所定の値より若干低い状態で継続して使用した場合であっても、減速機構部の減速比を切り替えでき、これによりモータの急激な温度上昇を防止して作業性を確保できる変速装置を提案することを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明の変速装置は、モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、を具備し、前記減速比切替手段が、前記減速比を切り替えるための切替用アクチュエータと、前記切替用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、前記制御部は、前記指標値が第一の閾値を過ぎた第一の場合に、前記切替用アクチュエータを起動させる制御を行うとともに、前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記繰り返しパターンが所定の条件を満たす第二の場合に、前記切替用アクチュエータを起動させる制御を行うことを特徴とする。
【0008】
また、前記第二の場合とは、前記繰り返しパターンが安定した時点から一定時間経過した場合であることが好ましい。
【0009】
あるいは、前記第二の場合とは、前記繰り返しパターンの増減が入れ替わる回数が所定の回数に達した場合であることが好ましい。
【0010】
あるいは、前記第二の場合とは、前記繰り返しパターンを時間で積分した積分値が所定の積分値に達した場合であることが好ましい。
【0011】
また、前記指標値は、モータ電流値であることが好ましい。
【0012】
あるいは、前記指標値は、モータ回転数であることが好ましい。
【0013】
あるいは、前記指標値は、前記モータの駆動状態を示す2つ以上の変数により決定されたものであることが好ましい。
【0014】
また、上記課題を解決するために本発明の変速装置は、モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、モータ温度を検知する温度センサとを具備し、前記減速比切替手段が、前記減速比を切り替えるための減速用アクチュエータと、前記減速用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、前記制御部は、前記指標値が第一の閾値を過ぎた場合に、前記切替用アクチュエータを起動させる制御を行うとともに、前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記温度センサで検知した前記モータ温度が、前記モータが異常発熱状態となる所定温度に達した場合に、前記減速用アクチュエータを起動させる制御を行うことを特徴とする。
【発明の効果】
【0015】
本発明の変速装置は、検出した負荷トルクが所定の値より若干低い状態で継続して使用した場合であっても、減速機構部の減速比を切り替えでき、これによりモータの急激な温度上昇を防止して作業性を確保できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第一実施形態の変速装置の説明図である。
【図2】同上の変速装置を備えた電動工具の要部の側断面図である。
【図3】同上の電動工具の要部の内部側面図である。
【図4】同上の変速装置の高速モードと低速モードにおける時間当たりの負荷トルクの変化の説明図である。
【図5】同上の変速装置における減速比の切り替わりの説明図である。
【図6】本発明の第二実施形態の変速装置における減速比の切り替わりの説明図である。
【図7】本発明の第三実施形態の変速装置における減速比の切り替わりの説明図である。
【発明を実施するための形態】
【0017】
本発明を、添付図面に示す実施形態に基づいて説明する。
【0018】
図2及び図3は、本発明の第一実施形態の変速装置が装着された電動工具の一例を示すもので、ハウジング100の後端部内に駆動源としてのモータ1が配置されており、このモータ1の出力は、減速機構部2と駆動伝達部3とを介して出力軸4に伝達される。モータ1は、ハウジング100の把持部に備えたトリガースイッチ103を操作することで回転駆動される。
【0019】
減速機構部2は、3段の遊星機構を軸方向に直列に並べたもので、その2段目の遊星機構におけるリングギア12は軸方向に移動可能となっており、図中の左方に移動させた場合には一段目の遊星機構のキャリア11外周面に設けられた歯と噛み合い、右方に移動させた場合にはギアケース9内周面に設けられた歯と噛み合う。つまり、リングギア12を左方に動かした場合には、2段目の遊星機構が減速輪列として機能せずに1段目の遊星機構が3段目の遊星機構に直結された状態となって、高速低トルクの回転が出力軸4に伝達される。そして、リングギア12を右方に動かした場合には、2段目の遊星機構が減速輪列として機能することになって、低速高トルク回転が出力軸4に伝達される。
【0020】
減速比の切り替えは、回転型の切替用アクチュエータ6と、この切替用アクチュエータ6の回転がギア47を介して伝達されることで回転する変速リング8とによってなされる。この変速リング8は、その軸周りの回転に加えて軸方向移動も可能となっている。そして、変速リング8は、リングギア12に連結されており、さらにギアケース9から突出するピン45と係合するカム溝41を備えている。切替用アクチュエータ6の回転で変速リング8が回転するとき、ピン45とカム溝41とのガイドによって軸方向に移動し、この軸方向移動に伴ってリングギア12も軸方向移動を行うことで変速が行われる。
【0021】
図1には、上述した電動工具のブロック図を示す。図中60は、第1駆動部65を介してモータ1を駆動するモータ制御部61と、第2駆動部66を介して切替用アクチュエータ6の回転を制御するアクチュエータ制御部62とを備えた制御部である。そして、図中70は電源部である。モータ1の回転及び切替用アクチュエータ6の回転はそれぞれ、駆動状態検知部68及び情報検知部67によって制御部60にフィードバックされる。この切替用アクチュエータ6と、第2駆動部66と、駆動状態検知部68と、制御部60とによって減速比切替手段の主体が構成されている。
【0022】
駆動状態検知部68は、モータ1にかかる負荷トルクの指標となる指標値を検知する。本実施形態では、この指標値はモータ1に流れるモータ電流値となっている。なお、指標値はモータ1のモータ回転数であってもかまわない。また、指標値は、モータ1の駆動状態を示す2つ以上の変数(例えば、モータ電流値とモータ回転数)により決定されるものであってもかまわない。また、駆動状態検知部68によりモータ1にかかる負荷トルクを直接検知するようにして、指標値を負荷トルクとしてもよい。
【0023】
トリガースイッチ103をON操作することで、制御部60は、減速機構部2における減速比を小の状態にセットした状態でモータ1を起動させる。そして、制御部60は、駆動状態検知部68により検知されるモータ1の駆動状態に応じて、第2駆動部66を介して切替用アクチュエータ6を起動させ、リングギア12を軸方向移動させることにより減速機構部2の減速比を大に変更する自動変速制御を行う。なお、自動変速制御は、トリガースイッチ103がON操作されている状態で行われる。
【0024】
上述した電動工具によって、ドリル穴あけ作業のようなドリル刃の回転動作により対象部材を切削する作業を行う場合、図4に示すように、モータ1のモータ電流値が、所定時間経過後、略一定の幅の増減を繰り返す。なお、図中の高速モードは、減速機構部2の減速比が小の場合のモータ電流値を示し、図中の低速モードは、減速機構部2の減速比が大の場合のモータ電流値を示す。
【0025】
高速モードによって切削作業を行うと、電動工具の刃と対象部材との噛み込みにより、駆動状態検知部68によって検知したモータ電流値が、第一の閾値L1よりも大きい状態が所定時間継続する場合(第一の場合)がある。第一の閾値L1は、モータ1が過負荷状態となる基準値である。
【0026】
このような場合に、本実施形態の変速装置では、制御部60によって切替用アクチュエータ6を起動させて減速機構部2の減速比を大に変更する自動変速制御が行われる。これにより、モータ1への負担を減少させて、モータ1の温度が急激に上昇することを防止している。
【0027】
加えて本実施形態では、図5に示すように、検知したモータ電流値が、第一の閾値L1と第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、この繰り返しパターンL3が所定の条件を満たす場合(第二の場合)にも、上述の自動変速制御が行われる。この第一の閾値L1と第二の閾値L2との間の範囲は、継続使用した際にモータ1の温度が急激に上昇する恐れのある過負荷範囲を示す。なお、本実施形態では、指標値として負荷トルクに比例するモータ電流値を用いているため、第二の閾値L2は第一の閾値L1よりも小さい値となっている。ここで、指標値として負荷トルクに反比例するモータ回転数を用いた場合、第二の閾値L2は第一の閾値L1よりも大きい値となる。
【0028】
上述の繰り返しパターンL3が所定の条件を満たす第二の場合とは、本実施形態では、第一の閾値L1と第二の閾値L2との間で繰り返しパターンL3が安定した時点から一定時間ΔT経過した場合を示す。この繰り返しパターンL3が安定した時点とは、本実施形態では、モータ1の駆動開始(T=0)からT1秒後の、モータ電流値の増減幅が安定しない監視区間を経過した時点T1を示す。時点T1では、繰り返しパターンL3は、第一の閾値L1と第二の閾値L2との間で略一定の幅で増減を繰り返す。
【0029】
つまり、本実施形態では、第一の閾値L1と第二の閾値L2との間で繰り返しパターンL3が安定した時点T1から一定時間ΔT経過後の時点T2において、上述の自動変速制御が行われる。
【0030】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができる。これにより、工具本体の発熱を抑制して作業性を確保することができる。また、本実施形態では、時間経過を自動変速制御を行うための条件とすることで、モータ電流値の検知を時点T1以降継続しなくともよく、切替用アクチュエータ6の自動変速制御にモータ電流値の検出誤差が影響されないものとなっている。
【0031】
次に、本発明の変速装置の他の実施形態について順に説明する。なお、上述した第一実施形態と同様の構成については詳しい説明を省略し、第一実施形態とは相違する構成について、主に詳述する。
【0032】
第二実施形態では、図6に示すように、上述した繰り返しパターンL3が所定の条件を満たす第二の場合が、繰り返しパターンL3の増減が入れ替わる回数が所定回数nに達した場合である。つまり、第二実施形態では、監査区間が経過した時点T1以降の繰り返しパターンL3の増減が正から負へと入れ替わる山の数をカウントして、その数が所定回数nに達したときに、上述の自動変速制御が行われる。なお、時点T1以降の繰り返しパターンL3の増減が負から正へと入れ替わる谷の数をカウントして、その数が所定回数nに達したときに、上述の自動変速制御が行われるようにしてもかまわない。第二実施形態では、検出したモータ電流値がフィードバックされる制御部60によって、入れ替わる回数をカウントする。
【0033】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができ、作業性を確保できる。また、本実施形態では、作業回数がカウント数で固定されているため作業者に対して工具の反力が安定して作用し、作業性の良いものとなっている。また、本実施形態では、繰り返しパターンL3の増減が入れ替わる回数をカウントするようにしたことで、切替用アクチュエータ6の自動変速制御にモータ電流値の増減幅の検出誤差が影響されなくなる。
【0034】
続いて第三実施形態では、図7に示すように、上述した繰り返しパターンL3が所定の条件を満たす第二の場合が、時点T1から形成される繰り返しパターンL3を時間で積分した積分値が所定積分値Qに達した場合であり、この場合に上述の自動変速制御が行われる。第三の実施形態では、検出したモータ電流値がフィードバックされる制御部60によって、積分値をカウントする。
【0035】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができ、作業性を確保できる。また、本実施形態では、作業回数がカウント数(積分値)で固定されているため作業者に対して工具の反力が安定して作用し、作業性の良いものとなっている。また、本実施形態では、繰り返しパターンL3の積分値をカウントするようにしたことで、モータ電流値の増減に応じたより確実なモータ1の負荷状態の検出を行うことができる。これにより、例えばモータ電流値が第二の閾値L2よりも若干大きい値で停滞する場合には、モータ電流値が第一の閾値L1よりも若干小さい値で停滞する場合と比べて、高速モードによる作業を長く続けることができる。
【0036】
なお、第一乃至第三実施形態における所定の条件を組み合わせたものを第二の場合としてもかまわない。
【0037】
続いて、第四実施形態について説明する。第四実施形態では、駆動状態検知部68で検知したモータ電流値が、第一の閾値L1と第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、モータ温度が、モータ1が異常発熱状態となる所定温度Bに達した場合に、上述の自動変速制御が行われる。なお、モータ温度は、変速装置に備える温度センサによって検知される。
【0038】
以上のように自動変速制御を行うようにしたことで、検出したモータ電流値が、第一の閾値L1を越えた場合だけでなく、過負荷範囲となる第一の閾値L1と第二の閾値L2との間にある場合でも、モータ1への負荷を減少させることができ、作業性を確保できる。また、本実施形態では、自動変速制御を行うために、モータ1の温度を直接検知するようにしたことで、モータ1の負荷状態を直接検知できて、切替用アクチュエータ6の自動変速制御をより的確に行うことができる。よってモータ1への負担の減少を確実に行える。
【0039】
以上まとめると、第一乃至第三実施形態の変速装置は、モータ1を駆動源とし、モータ1の回転動力を減速したうえで伝達する減速機構部2と、この減速機構部2の減速比を切り替える減速比切替手段と、を具備する。減速比切替手段が、減速比を切り替えるための切替用アクチュエータ6と、切替用アクチュエータ6を制御する制御部60と、モータ1にかかる負荷トルクの指標となる指標値を検知する駆動状態検知部68とを有する。制御部60は、指標値が第一の閾値L1を過ぎた第一の場合に、切替用アクチュエータ6を起動させる制御を行う。そして、制御部60は、指標値が第一の閾値L1とこれとは別の第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、且つ繰り返しパターンL3が所定の条件を満たす第二の場合に、切替用アクチュエータ6を起動させる制御を行う。
【0040】
このような構成とすることで、第一乃至第三実施形態の変速装置では、検知した指標値が第一の閾値L1を過ぎた場合だけでなく、第一の閾値L1と第二の閾値L2との間の場合であっても、切替用アクチュエータ6を起動させて、モータ1の出力を弱めることができる。すなわち、検出した指標値が所定の値より若干低い状態で継続して使用した場合であっても、減速機構部2の減速比を切り替えでき、これによりモータ1の急激な温度上昇を防止して作業性を確保できる。
【0041】
また、第一実施形態の変速装置では、前記第二の場合とは、繰り返しパターンL3が安定した時点から一定時間ΔT経過した場合である。
【0042】
このようにすることで、第一実施形態の変速装置では、繰り返しパターンL3が安定して形成されたことを確認した後では、指標値の検知を継続しなくともよく、切替用アクチュエータ6の自動変速制御に指標値の検出誤差が影響されないものとなっている。
【0043】
また、第二実施形態の変速装置では、第二の場合とは、繰り返しパターンL3の増減が入れ替わる回数が所定回数nに達した場合であり、第三実施形態の変速装置では、第二の場合とは、繰り返しパターンL3を時間で積分した積分値が所定積分値Qに達した場合である。
【0044】
このようにすることで、作業回数がカウント数で固定されているため作業者に対して工具の反力が安定して作用し、作業性の良いものとなっている。
【0045】
また、第一乃至第四実施形態の変速装置では、指標値は、モータ電流値であることが好ましい。
【0046】
このようにすることで、モータ1にかかる負荷トルクを正確に検出でき、この正確な検出を安価な回路構成で実現できる。
【0047】
また、第一乃至第四実施形態の変速装置では、指標値は、モータ回転数であることが好ましい。
【0048】
このようにすることで、指標値がモータ電流値である場合のようにモータ電流値を検知するための電流検知回路によるノイズの影響を受けなくてすみ、モータ1にかかる負荷トルクを正確に検出できる。
【0049】
また、第一乃至第四実施形態の変速装置では、指標値は、前記モータの駆動状態を示す2つ以上の変数により決定されたものであることが好ましい。
【0050】
このようにすることで、部品ばらつきによる閾値のばらつきの影響が小さくなり、指標値が高精度なものとなり、より安定した作業性の確保を図ることができる。
【0051】
また、第四実施形態の変速装置は、モータ1を駆動源とし、モータ1の回転動力を減速したうえで伝達する減速機構部2と、この減速機構部2の減速比を切り替える減速比切替手段と、モータ温度を検知する温度センサとを具備する。減速比切替手段が、減速比を切り替えるための切替用アクチュエータ6と、切替用アクチュエータ6を制御する制御部60と、モータ1にかかる負荷トルクの指標となる指標値を検知する駆動状態検知部68とを有する。制御部60は、指標値が第一の閾値L1を過ぎた第一の場合に、切替用アクチュエータ6を起動させる制御を行う。そして、制御部60は、指標値が第一の閾値L1とこれとは別の第二の閾値L2との間で増減を繰り返す繰り返しパターンL3を形成し、且つ前記温度センサで検知した前記モータ温度が、モータ1が異常発熱状態となる所定温度に達した場合に、切替用アクチュエータ6を起動させる制御を行う。
【0052】
このような構成とすることで、第四実施形態の変速装置では、検知した指標値が第一の閾値L1を過ぎた場合だけでなく、第一の閾値L1と第二の閾値L2との間の場合であっても、切替用アクチュエータ6を起動させて、モータ1の出力を弱めることができる。ここで、第四実施形態の変速装置では、モータ1のモータ温度を温度センサにより検出するようにしたことで、モータ1が異常発熱状態となる所定温度に達したかどうかを直接検知できるので検知精度が高いものとなっている。したがって、第四実施形態の変速装置では、検出した指標値が所定の値より若干低い状態で継続して使用した場合であっても、減速機構部2の減速比を切り替えでき、これによりモータ1の急激な温度上昇を防止して作業性を確保できる。
【0053】
以上、本発明を添付図面に示す実施形態に基づいて説明したが、本発明は上記の各実施形態に限定されるものではなく、本発明の意図する範囲内であれば、適宜の設計変更が可能である。なお、本発明の変速装置は、電動工具用に限定されない。
【符号の説明】
【0054】
1 モータ
2 減速機構部
6 切替用アクチュエータ
60 制御部
68 駆動状態検知部
ΔT 一定時間
n 所定回数
Q 所定積分値
L1 第一の閾値
L2 第二の閾値
L3 繰り返しパターン
【特許請求の範囲】
【請求項1】
モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、を具備し、
前記減速比切替手段が、前記減速比を切り替えるための切替用アクチュエータと、前記切替用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、
前記制御部は、
前記指標値が第一の閾値を過ぎた第一の場合に、前記切替用アクチュエータを起動させる制御を行うとともに、
前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記繰り返しパターンが所定の条件を満たす第二の場合に、前記切替用アクチュエータを起動させる制御を行うことを特徴とする変速装置。
【請求項2】
前記第二の場合とは、前記繰り返しパターンが安定した時点から所定時間経過した場合であることを特徴とする請求項1に記載の変速装置。
【請求項3】
前記第二の場合とは、前記繰り返しパターンの増減が入れ替わる回数が所定の回数に達した場合であることを特徴とする請求項1に記載の変速装置。
【請求項4】
前記第二の場合とは、前記繰り返しパターンを時間で積分した積分値が所定の積分値に達した場合であることを特徴とする請求項1に記載の変速装置。
【請求項5】
前記指標値は、モータ電流値であることを特徴とする請求項1〜4のいずれかに記載の変速装置。
【請求項6】
前記指標値は、モータ回転数であることを特徴とする請求項1〜4のいずれかに記載の変速装置。
【請求項7】
前記指標値は、前記モータの駆動状態を示す2つ以上の変数により決定されたものであることを特徴とする請求項1〜4のいずれかに記載の変速装置。
【請求項8】
モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、モータ温度を検知する温度センサとを具備し、
前記減速比切替手段が、前記減速比を切り替えるための減速用アクチュエータと、前記減速用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、
前記制御部は、
前記指標値が第一の閾値を過ぎた場合に、前記切替用アクチュエータを起動させる制御を行うとともに、
前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記温度センサで検知した前記モータ温度が、前記モータが異常発熱状態となる所定温度に達した場合に、前記減速用アクチュエータを起動させる制御を行うことを特徴とする変速装置。
【請求項1】
モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、を具備し、
前記減速比切替手段が、前記減速比を切り替えるための切替用アクチュエータと、前記切替用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、
前記制御部は、
前記指標値が第一の閾値を過ぎた第一の場合に、前記切替用アクチュエータを起動させる制御を行うとともに、
前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記繰り返しパターンが所定の条件を満たす第二の場合に、前記切替用アクチュエータを起動させる制御を行うことを特徴とする変速装置。
【請求項2】
前記第二の場合とは、前記繰り返しパターンが安定した時点から所定時間経過した場合であることを特徴とする請求項1に記載の変速装置。
【請求項3】
前記第二の場合とは、前記繰り返しパターンの増減が入れ替わる回数が所定の回数に達した場合であることを特徴とする請求項1に記載の変速装置。
【請求項4】
前記第二の場合とは、前記繰り返しパターンを時間で積分した積分値が所定の積分値に達した場合であることを特徴とする請求項1に記載の変速装置。
【請求項5】
前記指標値は、モータ電流値であることを特徴とする請求項1〜4のいずれかに記載の変速装置。
【請求項6】
前記指標値は、モータ回転数であることを特徴とする請求項1〜4のいずれかに記載の変速装置。
【請求項7】
前記指標値は、前記モータの駆動状態を示す2つ以上の変数により決定されたものであることを特徴とする請求項1〜4のいずれかに記載の変速装置。
【請求項8】
モータを駆動源とし、前記モータの回転動力を減速したうえで伝達する減速機構部と、この減速機構部の減速比を切り替える減速比切替手段と、モータ温度を検知する温度センサとを具備し、
前記減速比切替手段が、前記減速比を切り替えるための減速用アクチュエータと、前記減速用アクチュエータを制御する制御部と、前記モータにかかる負荷トルクの指標となる指標値を検知する駆動状態検知部とを有し、
前記制御部は、
前記指標値が第一の閾値を過ぎた場合に、前記切替用アクチュエータを起動させる制御を行うとともに、
前記指標値が前記第一の閾値とこれとは別の第二の閾値との間で増減を繰り返す繰り返しパターンを形成し、且つ前記温度センサで検知した前記モータ温度が、前記モータが異常発熱状態となる所定温度に達した場合に、前記減速用アクチュエータを起動させる制御を行うことを特徴とする変速装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−107170(P2013−107170A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254462(P2011−254462)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(509119153)パナソニックESパワーツール株式会社 (107)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(509119153)パナソニックESパワーツール株式会社 (107)
【Fターム(参考)】
[ Back to top ]