
外乱の位置の評価
本発明は、特に外乱が時間変化外乱である場合に、光リンクでの外乱の位置を評価するための方法及び装置に関する。一連の低コヒーレンステストパルスが光リンクに入れられ、後方散乱帰還信号が監視される、光時間領域反射率測定法である。テストパルスは不均衡マッハツェンダー干渉計を通過し、テストパルスごとに、1組の時間変位されたパルスコピーがリンク上に開始される結果となる。後方散乱帰還信号は同じ干渉計を通過し、各組のパルスコピーに再調整させ、互いに干渉させる。時間変化外乱は1組の各パルスコピーに異なる影響を及ぼす可能性がある。その結果、ステップ等の異常が後方散乱信号で発生する可能性がある。異常の時間位置から、関与する外乱の距離が評価される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、伝送リンク上の外乱(disturbance)の位置を、特に外乱が時間変化外乱である場合に評価するための方法及び装置に関する。
【背景技術】
【0002】
導波管内の不整の位置を、導波管内でテストパルスを開始し、もしあれば、帰還信号の時間依存性の異常を検出するためにテストパルスの分散された後方散乱を監視することにより、推定することが公知である。異常の例は帰還信号の時間に依存した振幅の階段状変化となるであろう。しかしながら、このような公知の光時間領域反射率測定法(OTDR)技法は時間変化外乱を検出するのに適していない。
【発明の開示】
【0003】
本発明によると、伝送リンク上での時間変化外乱(disturbance)の位置を評価する方法が提供される。この方法は、1組の信号コピーがあるようにソースから出力信号を少なくとも部分的にコピーするステップと、伝送リンク上に信号コピーを送信するステップと、伝送リンクから、以前にその上で送信された帰還信号コピーを少なくとも部分的に受信するステップと、組み合わせ信号を生じさせるために送信された組の受信信号コピーを組み合わせるステップと、通信リンク上での外乱の位置を評価するために組み合わせ信号の時間特性を使用するステップと、を含む。
【0004】
出力信号のコピーは組み合わせ信号を生じさせるために結合されるため、これらのコピーの内の少なくとも1つの修正は組み合わせ信号の変化を生じさせ、それにより時間変化外乱の評価を促進する可能性が高い。
【0005】
好ましくは、伝送リンクは光ファイバのような光導波管であろう。リンクの動的外乱又は他の時間変化する外乱は、通常、音響振動又は他の振動のような物理的かく乱であろう。物理的かく乱は伝送リンクの光媒質の歪み又は弾性波を生じさせ、それによりリンクに沿って移動する信号コピーの内の少なくとも1つの位相を変更する可能性が高い。動的外乱は静止している、つまり定常点に位置してもよい。代わりに動的外乱は光導波管に沿って移動してもよい。
【0006】
好ましくは、信号は、例えばレイリー後方散乱等の分散後方散乱のプロセスにより返され、その結果この信号は、信号が導波管に沿って伝播するにつれて漸次的に返される。通常、これは経時的に分散される組み合わせ信号を生じさせる。好ましくは、組み合わせ信号はその中の外乱特長を検出するために監視され、その外乱特長から外乱の存在が推論されてよい。
【0007】
外乱特長の一例は、例えば時間に関する階段状変化(step change)等、組み合わせ信号の振幅の変化であってよい。組み合わせ信号はトレース式で時間の関数としてディスプレイ装置に表示されてよく、外乱の発生をトレースから視覚的に推論できるようにする。しかしながら、組み合わせ信号は外乱特長のさらに微妙な特性を検出するために分析されてよい。
【0008】
組み合わせ信号の時間特性は、外乱特長と関連付けられた再帰時間、特に外乱特長に関与する(いったん結合された)帰還信号コピーの到着時間であってよく、この時間は、物理的かく乱の位置まで、及び物理的かく乱の位置から光が伝播する、往復時間である。一実施形態では、ソースからのパルスが時間分散組み合わせ信号を生じさせ、組み合わせ信号は基準時間からの経過時間の関数として監視され、その基準時間は、パルスが発生する時間に関連する。
【0009】
ソースからの出力信号は、好ましくは不規則な成分を有し、その場合ソースから出力信号を少なくとも部分的にコピーするステップは、好ましくは、不規則な成分が1組の信号コピーのそれぞれに共通となる結果をもたらす。信号の他の特性は、それぞれの信号コピーで同じである必要はない。例えば、信号コピーは異なる振幅を有してよい。不規則な成分は好ましくは無作為又は擬似ランダム(擬似ランダムによって、理論上、成分が予測可能であっても、実際にはこれを行うために必要とされる時間又は処理能力により予測することが不可能になることが意味される)であろう。出力信号が波形を有する場合、波形が無作為に発生する位相変化を有する場合には、不規則な成分は波形の位相により提供されてよい。波形は便宜上、好ましくは10ピコ秒未満、あるいは1ピコ秒未満である、短いコヒーレンス時間を有する光学ソースにより提供されてよい。組み合わせ信号は好ましくは2つの波形の干渉又は混合から生じる干渉信号となる。
【0010】
好ましくは、信号コピーは互いを基準にした時間遅延を伴い伝送リンクに沿って送信され、その結果、先導するコピーと後続のコピーがある。次に、返される先導コピーは、以前の後続コピーを基準にして遅延することがあり、その結果両方のコピーは、実質的に互いとと歩調を合わせて結合できる。
【0011】
好ましい実施形態では、これは不均衡マッハツェンダー干渉計のような干渉計の段階を使用して達成される。好ましい実施形態では、光学ソースからの出力は干渉計に送られ、そこで信号はコピーされ、1つのコピーが干渉計の1つの経路に向けられ、その結果信号コピーが干渉計段階から送信される時間との間で相対的な結果遅延又は遅延差結果が生じるように、各経路と関連付けられた遷移時間は異なる。外部方向で課される相対遅延は戻り方向で課される相対遅延と同じとなり、これは各ケースで2つの経路の遷移時間の差異により決定されるため、同じ干渉計段階は、次に帰還信号コピーを特に便利な方法で再調整するために利用できる。
【0012】
遅延差は、好ましくは少なくとも部分的にソースの平均コヒーレンス時間に依存して選ばれる。遅延差は好ましくはコヒーレンス時間よりはるかに長くなる。好ましくは、コヒーレンス時間対遅延差の比率は103より大きい又は等しくなるが、好ましくは105、又はさらに好ましくは107となるであろう。
【0013】
出力信号をコピーするステップと、信号を送信するステップは、好ましくは第1のロケーションで実行され、外乱は第1のロケーションから少なくとも1km又は少なくとも10kmの距離でも検出可能なままである。
【0014】
伝送リンクは誘導トラックに沿って延びる光チャネルを含んでよく、誘導トラックは移動する車両の動きを誘導するように構成される。このようにして、伝送リンクは伝送リンクに沿って移動するように誘導された車両の動きを監視するために使用されてよい。
【0015】
好ましくは、光チャネルはトラックに対して機械的に結合された関係にあり、その結果車両の動きが光チャネルに沿った外乱を引き起こす。光チャネルはトラックに直接的に結合される必要はなく、例えば地面を介して間接的に結合されてよい。例えば、光チャネルは、必ずしも固定されずにトラックに隣接する地面上、又はダクト内にあるだけでもよい。しかしながら、機械的な結合のため、振動又はトラックに沿った車両の動きにより生じた音響外乱のような他の外乱が、伝送リンクで(減衰されている、あるいは修正されているとしても)対応する外乱を引き起こす可能性があり、この外乱は車両と同じ速度で連続してリンクに沿って移動する。
【0016】
光チャネルに対する音響結合は特定の結合点で強化される必要はない(が、強化されてもよい)ため、及び代わりにトラックとチャネル間の媒質によって提供される連続的な結合で通常十分であるため、既存のトラック側ファイバケーブルにより提供される光チャネルは便利に使用されてよい。代わりに、既存のトラック側のダクト内に設置される新しいケーブルが利用されてもよい。
【0017】
誘導トラックは、好ましくは1つ以上のレールの形式を有し、そのレールは通常列車の動きを誘導する。列車によって生じる振動が大きくなり、それによりこのような車両の位置をさらに容易に検出できるようにする可能性があるため、この構成は特に便利である。
【0018】
本発明の追加の態様は添付の特許請求の範囲に提供される。本発明は、以下の図面を参照してほんの一例としてさらに詳しく後述される。
【発明を実施するための最良の形態】
【0019】
外乱の位置の推定
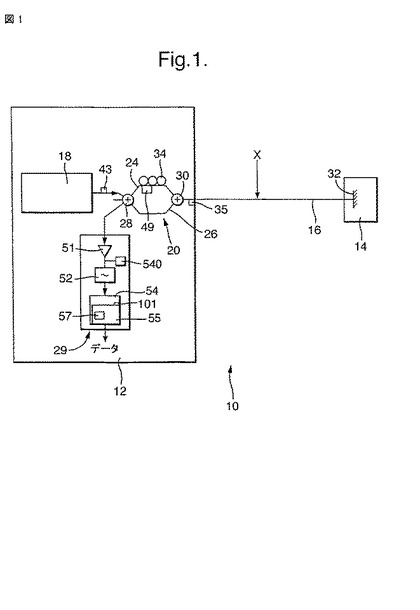
図1は、監視ステーション12が光ファイバ16に接続されている検知システム10を示す。ファイバに沿ったロケーションが決定されなければならない動的外乱(disturbance)が、Xと呼ばれるポイントでファイバに導入される。大まかに言えば、監視ステーション12は、ファイバ16の上に検知信号を送信するように構成され、その検知信号は動的外乱によって位相変化を被る。検知信号の成分は、ファイバに沿ってレイリー後方散乱のプロセスにより返される。監視ステーション12に返される後方散乱成分は、次に、動的外乱により引き起こされた位相変化を区別するために処理される。ファイバの異なる領域から返される後方散乱成分は異なるときに監視ステーション12に達するため、外乱の位置は変調済みの後方散乱成分の帰還時から決定される。
【0020】
監視ステーション12は、短いコヒーレント時間(出力での無作為な位相変化が信号に不規則な成分を提供する)の光パルス源18を含み、パルス源はドライバユニット118によって駆動されている。光学ソース18からのパルスは、干渉計段階20、ここでは第1の経路24と第2の経路26を備えるマッハツェンダー干渉計に送られ、経路24、26はそれぞれの第1の結合段階と第2の結合段階28、30によってそれぞれの端部で結合される。外部方向で移動する光の場合、第1の結合段階28は指向性のパワー(強度)スプリッタの機能を果たし、光学ソース18から経路24、26のそれぞれに光を向け、各経路に対する電力は所定の方法で共用される(ここでは、異なる比率も試用できるであろうが、第1の結合段階が50:50のパワースプリッタとしての機能を果たす)。
【0021】
このようにして、光学ソース18によって提供される各パルスの場合、そのパルスは、第1のコピーと第2のコピーがあるようにコピーされ、第1のコピーと第2のコピーはこの例では互いの複製である。他方のコピーは第2の経路26に沿って移動するが、一方のコピーは第1の経路24に沿って移動する。第2の結合段階30は干渉計の出力35に結合され、この出力はファイバ16に接続される。第2の結合段階30は、外部方向で移動する光のためのコンバイナとしての機能を果たし、第1の経路と第2の経路から干渉計出力35に光を向ける。干渉計の第1の経路は、第1の結合段階と第2の結合段階28、30の間でそれに沿って移動する光の遷移時間を増加するための遅延段階34を有し、結合段階28、30の間で移動する光の遷移時間は、第2の経路26に沿ってより第1の通路24に沿っての方が長くなる。したがって、光学ソースにより生じる各パルスにとって、干渉計20は遅延時間Dにより、他のパルスコピーを基準にしてパルスコピーの内の1つを遅延するのに役立ち、パルスコピーは互いに対して異なるときに光ファイバネットワーク16に送信される。
【0022】
戻り方向で移動する信号の場合、第2の結合段階30は、(光学ソース18から)順方向での光に対する第1の結合段階28の作用と同様にパワースプリッタとして機能を果たす。このようにして、帰還信号の強度は第2の結合段階30で分割され、他方の部分は第2の経路26に沿って向けられるが、一方の部分は第1の経路24に沿って向けられる。第1の結合段階28は、次に戻り方向の第1の経路と第2の経路からの光を結合する働きをし、結合された光を干渉(組み合わせ)信号として、第1の結合段階28の出力に結合された信号処理システム29に向ける。
【0023】
信号処理システムは、光信号を電気信号に変換するために第1の結合段階28に結合された受光器51と、受光器51から電気信号を受信し、電気信号をフィルタリングするためのフィルタ52と、フィルタリングされた電気信号を処理するための第1の信号処理ユニット54と、電気信号のさらに詳細な処理を実行するための任意のさらなる処理ユニット540とを含む。フィルタ52の帯域幅(約1MHz)は、外部騒音を最小限に抑えるために予想信号の帯域幅に適合される。
【0024】
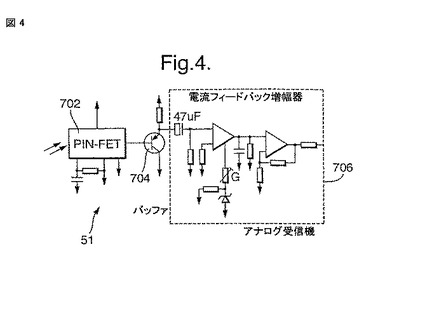
受光器51は、図4にさらに詳細に示されている。カプラ28からの光は、可変利得電流帰還増幅器706に送られる前に、フォトトランジスタ702、ここではバッファとしての役割を果たすバイポーラトランジスタ704に送られる、電気的な出力を生じさせるPIN−FETに入射する。光源18は幅広く円滑なパワースペクトル及び約0.5ps以下という短いコヒーレント時間を有するため、光源18は発光ダイオード、エルビウムでドーピングされたファイバ増幅器等の増幅された自然放出のソース、半導体光増幅器、又はスーパー発光ダイオード(Super Luminescent Diode)であってよい。しかしながら、図5に関して後述されるように、ファブリー−ペローレーザダイオードが好ましい。
【0025】
光学ソースにより生じる放射線は非偏光であってよい、あるいは代わりに、光が干渉計に入射される前に、光を偏光解消するために偏光解消ユニット43が光源と干渉計の間に設けられてよい(偏光解消ユニットは例えばファイバリオ偏光解消器(de−polarizer)であってよい)。偏光コントローラ又は偏光解消器49は、干渉計の経路の内の1つ、ここでは第1の経路に設けられてよく、その結果第1のカプラ28での戻り方向で結合する第1の経路からの光の偏光は、少なくとも部分的に他方の経路からの光の偏光と位置合わせされている。偏光解消器は、帰還後方散乱信号における任意の偏光構造を効果的にスクランブルし、損失欠陥を検出するのをはるかに容易にするという利点も有する。
【0026】
通常、ソースは、標準的な電気通信光ファイバを効率的に使用するために1ミクロンから2ミクロンの間、好ましくは約1.3ミクロン又は1.55ミクロンの波長で動作し、このようなファイバはこの波長での単一モード伝送を支持するように構成されている。通常、ファイバは約9ミクロン又は10ミクロンである直径の単一コアを有する。
【0027】
監視ステーション12の動作は、ファイバ上の特定のポイントから返される、外に向かうパルスコピーの帰還成分を考慮することによって最もよく理解できる。ソース18によって生じるパルスごとに、4つの結果として生じる信号がある。つまり、順方向と逆方向両方で干渉計20の第2の経路26に沿って移動した遅延していない(non−retarded)信号S0、順方向で(しかし、逆方向ではなく)遅延D分遅延された第1の遅延信号S1、逆方向で(しかし、順方向ではなく)遅延D分遅延された第2の遅延信号S2、及び遅延2D分遅延された二倍遅延信号S3であって、信号S3は順方向と逆方向のそれぞれで遅延する。
【0028】
一方向で遅延した第1の遅延信号と第2の遅延信号S1、S2だけが、同時に第1の結合段階28に返される。ファイバ16に任意のいかなる外乱もない場合、これらの信号は互いのコピーであり(つまり同じ位相又は同じ位相変化を有し)、信号は第1の結合段階28で干渉する、あるいはそれ以外の場合建設的に結合する。しかしながら、信号S1、S2の組の一方が、(動的外乱で起こる可能性があるように)組の他方を基準にして修正される場合、信号S1、S2はもはや建設的に干渉しない。これは、第1の結合段階からの干渉信号の変化を生じさせる。特に、信号S1、S2の相対的な位相変化は、第1の結合段階の出力での干渉信号の振幅変化を生じさせる。
【0029】
ファイバを通って移動する光の位相変化は通常、物理的動乱によって達成される。これは、(例えば変位、音波又は超音波あるいは他の振動によって引き起こされる)物理的動乱が、光ファイバ又は他の光リンクの伝送特性の変化を生じさせる可能性があるためである。特に、衝撃によって引き起こされる等の物理的動乱は、屈折率及び偏光の変化、又は物理的な長さの変化、あるいはこれらの組み合わせのいずれかによって、ファイバの光伝播媒質(通常は、ファイバのシリカガラスコア)の不自然な領域における光路長を変更する、時間変化歪みを生じさせる可能性がある。
【0030】
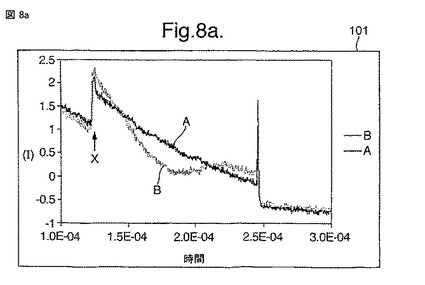
ソースにより生じるパルスごとに、干渉信号がファイバに沿ってパルスコピーの遷移時間に対応する時間に渡って分散される。図8aのトレースAは、送信されたパルスから生じる干渉信号(I)が、ソースからのパルスの伝送からの経過時間に伴いどのように変化するのかを示している(トレースBはさらに強力な外乱用である)。ここでは、トレースに沿った各ポイントは、関与する信号が返されたファイバに沿った位置に一致する。
【0031】
当初、パルスコピーは後方散乱又は損失を通してほとんど減衰を被らないであろう。したがって、パルスの強度に関係する後方散乱成分の強度は高く、干渉信号も高い。パルスコピーがファイバに沿って移動するにつれ、後方散乱成分だけではなくパルスも減衰され、干渉信号は時間とともに減少する結果となる。
【0032】
時間t1の後、帰還後方散乱成分が、位置Xを超えて移動してきたパルスから生じるであろう。パルスコピー又は後方散乱成分が位置Xを通過すると、パルスコピーから生じる後方散乱成分の位相は外乱により影響を及ぼされる。外乱は時間とともに変化するため、パルスの既定の組の後方散乱成分の相対的な位相は変化し、時間t1での干渉信号に急な変化を生じさせる。同様に、Xを超えて移動してきたパルスの帰還成分も影響を受けるであろう。したがって、時間t1後、トレースは階段状にシフトされたままとなる。時間t1は第1の検知位置へ向かい且つ戻る往復時間に相当するため、ポイントXのファイバ経路に沿った距離はt1の値(又は、オフセット、例えば干渉計の遅延線34によるオフセットを含む基準時間を基準にした値t1)から推論できる。
【0033】
図8aのトレースを見るために、処理ユニット54は、プロセッサ/メモリ回路55を含む。プロセッサ/メモリ回路は、ソース18を駆動する電気パルス信号にアクセスするために光学ソース18のドライバ118に接続される。プロセッサ/メモリ回路は、ソースからの各パルスの伝送の後に経過した時間を示すタイマユニット57を含み、タイマユニットは、新しい光パルスが開始されると、パルス信号を使用してリセットするように構成されている。プロセッサ/メモリ回路55は、電気ドメインにおいて干渉信号を受信するため、及びパルスの発生からの経過時間の関数として各パルスからの信号を記憶するために、帯域通過増幅器51に接続されている。時間の関数として干渉信号を記憶するためには、プロセッサ/メモリ回路55は干渉信号を周期的にサンプリングし、関連付けられた再帰時間とともに各サンプルを記憶するように構成される。記憶された干渉信号は、次に、観察器101で見ることができる。しかしながら、干渉信号は例えば陰極線管の残留磁化(remnance)を通して等、一時的に記憶されてよい。
【0034】
ソースからのパルスは、好ましくは1msごとに繰り返し送信され、各パルスの持続時間は1μsである。代わりに、さらに高い解像度の場合、パルスは0.5μsの長さであってよい。
【0035】
さらに短い長さの場合、及び外乱が小さい(つまり、ファイバ位相変化が線形に応答する)ときには、干渉計システムは、外乱周波数が低いとあまり敏感ではないため、遅延線は、好ましくは少なくとも20kmとなる。(約100μsという遅延に相当する)約20kmという遅延線を用いると、パルスは通常、1msごとに送信された1μs期間であるため、パルス(信号)コピーは、それらがファイバに沿って移動するにつれて空間的にはっきりと区別できるようになる。しかしながら、さらに長いパルス、又は遅延がさらに短い場合には、信号コピーが互いの上にある可能性がある。連続信号の場合、連続信号は連続波形として継ぎ目なく接合されるため、信号はそれぞれ別個のエンティティではない。
【0036】
一実施形態では、外乱の発生は、まず、子端末局(outstation)14に位置するファイバの鏡端面32から反射された連続光信号を使用して検出される。本来、図1の装置は、パルスよりむしろ連続信号を生じさせるソースと共に使用できる。信号は子端末局から返され、パルスと同様に干渉計で再結合される。しかしながら、連続信号を用いる場合、後方散乱パルスに必要とされる帯域幅より低い帯域幅(約100kHz)を有する帯域通過増幅器52が使用でき、干渉信号の雑音がより少なく、それにより外乱のより敏感な検出を可能とする結果となる。さらに、連続信号を用いると、外乱の検出に位置解像度が必要とされないため、帰還信号はある期間に渡って積分できる。いったん外乱が検出されると、その位置は前記に説明されたように確立できる。それにも関わらず、図8aから明らかであるように、連続信号よりむしろパルスを使用して外乱の発生自体を決定できる。
【0037】
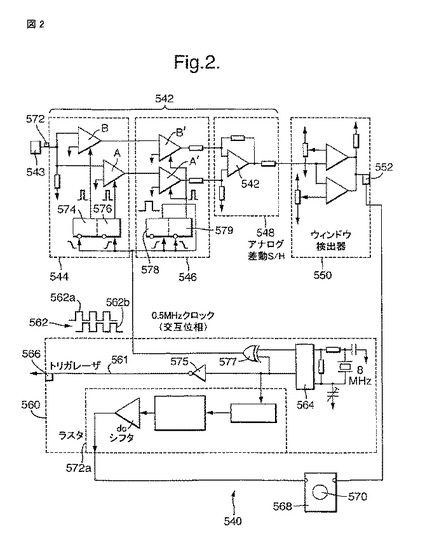
図2は、追加の信号処理ユニット540を示す。第1信号処理ユニット54と同様に、追加の信号処理ユニット540は、光時間領域反射率測定法(OTDR)に基づいて、リンク16に沿った1つ以上の外乱の距離を評価するために適切である。図1では、追加の信号処理ユニット540は第1の処理ユニット54に対する追加ユニットとして示されているが、実際には、追加の処理ユニット540だけが監視ステーションで実現されてよい。
【0038】
大まかに言えば、追加の信号処理ユニット540は、第2のロケーションから発する干渉を使用して第1のロケーションから生じる干渉信号を処理するように構成され、第2のロケーションは第1のロケーションの上流に(つまり、第1のロケーションより監視ステーションのより近くに)配置される。実際には、これは、第1の時間に、及び第2の時間に帰還信号をサンプリングし、2つのサンプリングされた信号の差異を評価することにより行われる。この手法は、パルス(及びその帰還成分)が第2のロケーションに達するために第1のロケーションを通過するため、第1のロケーションからの干渉信号が第2のロケーションからの寄与を含むことがあることを認識している。不必要な処理を回避するために、各ロケーションは(パルス時間幅により決定される)分解能セルと関連付けられ、第1のロケーションと第2のロケーションは近接する分解能セルに対応する。ファイバの長さに沿った隣接する分解能セルからの干渉信号の間の差異は、このようにして評価できる。
【0039】
信号処理ユニット540は、サンプリングユニット542、ここではアナログ微分サンプル保持回路を含み、この回路は入力543でフィルタ52に接続される。サンプリングユニット542は、MZカプラ28から、特に同様に受光器51から信号を受信するフィルタ52から、入信信号をサンプリングするように構成される。サンプリングユニット542は、相隔たる時間位置で入信信号をサンプリングするように構成されたサンプリング段階544と、相隔たる位置で以前にサンプリングされた信号を位置合わせするための位置合わせ段階546と、再調整された信号を、特に信号間の差異を評価するために比較するための比較段階548とを含む。比較段階548からの信号は、特に比較段階548からの出力信号が閾値を超えて中心値から逸脱する場合に、信号出力552で出力を生じさせるように構成されたウィンドウ検出器回路550に渡される。
【0040】
タイミング制御回路560は、各トリガ信号に応えてソースがパルスを発するように、光学ソース18のドライバユニットをトリガするためのトリガ信号561を提供するために含まれる。タイミング制御回路560は、サンプリングユニット、特にサンプリング段階544と546の動作を制御する、クロックパルス562も生じさせる。トリガ信号561及びクロックパルス562は、例えばクロック回路であってよい共通のタイミングソース564によって生成される。トリガ信号561は、トリガ出力566でタップされてよく、オシロスコープ568のトリガに送られる。信号出力552は、次に、好ましくは記憶装置オシロスコープであり、ディスプレイ570上で見られるオシロスコープ568の信号入力に送ることができる。ラスタ回路572aは、二次元ディスプレイを生成するためにオシロスコープに送信できるラスタ信号を生成するために設けられてよい。追加のゲート575と577は、図2に示されるようにタイミング制御回路に含まれている。
【0041】
本例のクロックパルスは0.5MHzという周波数であり、交互位相タイプである。つまり、ある波列(wave train)が1つの位相562aで生成され、別の波列が180°の移相で生成される。タイミング制御回路は、クロック位相が光学ソース18へのトリガパルスごとに交替し、二次元ディスプレイを生成するためにラスタジェネレータを同期するようにも構成される。二次元表現により、ファイバの各位置からの後方散乱信号の時間−進化を、記憶装置オシロスコープ568のディスプレイ570で観察できるようになる。デジタル電子とアナログ電子は、別々の、調整され、減結合された電源(図3では、下向きの矢印が接地又は負の供給レールへの接続を示すが、上向きの矢印が正の供給レールへの接続を示す)を使用した。
【0042】
さらに詳細には、サンプリングユニット542は、入力信号(つまりOTDR信号又は電気ドメイン内の干渉信号に同等な信号)のコピーを生成するための、単純な「T」コネクタであるであろうコピー段階572を含む。サンプリング段階544は、2つのサンプリング増幅器A、Bを有し、それぞれのパルスユニット574、576によってサンプリングするようにそれぞれがトリガされ、パルスユニットはタイミング制御回路560からのクロックパルスを与えられる。コピーAとBはそれぞれ増幅器A、Bに入り、それぞれの控えめの時間(discreet-time)パルス振幅コピーが生成される。パルスユニット574、576は、2つのコピー(AとB)のサンプリング例が、範囲分解能間隔、ここでは1マイクロ秒でオフセットされるように構成される。サンプリング増幅器A、Bからの信号は、次に、それぞれ位置合わせ段階546の追加のサンプリング増幅器A’及びB’に渡され、これらのサンプルは次に再サンプリングされる。
【0043】
追加のサンプリング増幅器A’、B’又は同等にサンプリングするゲートは、それぞれのパルスユニット578、579によってトリガされる(パルスユニット578、579は、タイミング制御ユニット560からのクロックパルスで駆動されている)。追加の増幅器A’、B’は、Aコピーの再サンプリングされた信号がBコピーのサンプリングされた信号に先行するように(パルスユニット578、579のタイミングを通して)動作される。これは、Aサンプルは、B信号にただちに先行する範囲分解能セルから生じることを意味する。この再サンプリング戦略の結果、サンプリングポイントは(光学ソースによってファイバリンク16の上に当初送信されたパルスは、持続時間が1マイクロ秒であると想定して)2マイクロ秒というステップサイズであるが、ファイバリンク16(1マイクロ秒に相当する距離分、分離される)に沿って「歩行する(walk)」。
【0044】
比較段階548は、二回サンプリングされた信号AとBの間の差異を評価するための差動増幅器549を含む。つまり、差動増幅器の出力はA−Bに関する出力を示す。AトレースとBトレースは比較される前に再調整されるため、信号の時間依存性の傾き又は勾配に関する値が得られると考えられてよい。事実上、時間依存サンプリングされた信号は区別される。つまり、(サンプルは、必ずしも即座に隣接するサンプルである必要はないが)隣接するサンプル間の差異が評価される。
【0045】
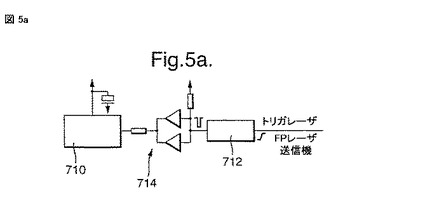
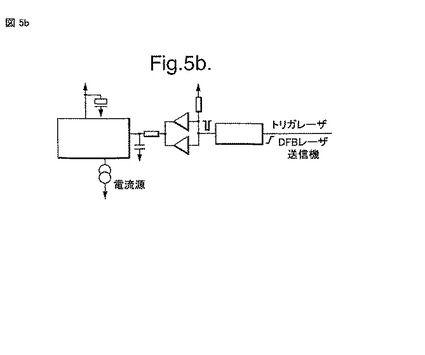
受光器51は図4にさらに詳細に示されている。カプラ28からの光は、可変利得電流帰還増幅器706に送られる前に、ここではバッファとしての役割を果たすバイポーラトランジスタ704に送られる電気出力を生じさせるPIN−FETである、フォトトランジスタ702に入射する。図5aでは、好ましい光学ソース18がさらに詳しく示されている。(干渉計段階を通した)リンク16への伝送のための光はファブリーぺロレーザ710によって生成される。タイミング制御回路560からのトリガ信号561は、トリガ信号が受信されるたびにパルスを生成する単安定パルス発生ユニット712で受信され、このパルスは、レーザ710を駆動するためにブースタ増幅器714によって増幅される。図5bは、DFBレーザが使用される代替策を示す。しかしながら、DFBレーザがコヒーレンス雑音、及び不安定性を引き起こすことがあることが判明している。
【0046】
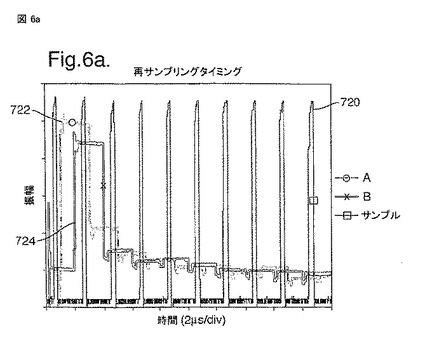
図6a、図6b及び図6cは、信号処理ユニット540の多様なポイントでのサンプリング波形を示す。図6aは、パルス振幅変調済みのサンプリング波形AとBを基準にした、規則正しい(再)サンプリングパルスの位置を示す。図6aでは、繰り返すサンプルパルス720が示されている(最も濃い線)。Bサンプリング信号(すなわち、増幅器Bからの出力)はより薄い線724で示されているが、Aサンプリング信号(増幅器Aからの出力)は灰色の線722で示される。「A」トレースから分かるように、後方散乱信号の振幅は、通常OTDRで予想されるように、(光学ソースからのテストパルスの始まり以来の)経過時間が延びるにつれて減少する。「B」トレース724の振幅は同様に経過時間とともに減少するが、Aトレースを基準にしてシフトされる。
【0047】
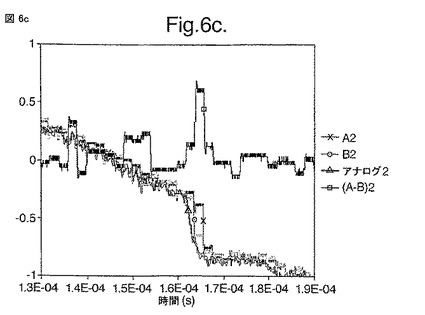
図6bでは、再サンプリングされた信号AとB(つまり、サンプリング増幅器A’とB’からの出力)が示され、Bサンプルはより薄いトレース728であるが、Aサンプルは濃いトレース726である。2つの信号は再サンプリングされたため、前述されるように、これらはここで位置合わせされる。A再サンプリング信号とB再サンプリング信号の差異(つまり、比較段階548からの出力(A−B))は、薄い方のトレース730によって示されている。このトレースでの外乱を示す明白な特長はないが、図6cの(A−B)トレースは、明らかに約165マイクロ秒(曲線AとBの階段状変化に相当する時間)で特長を示している。図6bと図6cのトレース間の差異は、サンプリング増幅器を駆動するクロック信号が図6bでゼロ移相を有するが、図6cでは180度の移相を有するという点である。これは、1つの位相でのクロック信号で第1の(A−B)トレース、及び180°オフセットされた位相でのクロックでの別の(A−B)トレースを生成することによって、1つのトレースでのサンプリングセルの間のギャップが、1セル長分、シフトされるセル内でサンプリングすることにより、どのようにして効果的に削除できるのかを描いている。このようにして、本実施形態の分解能は、100メートルの長さに相当する1マイクロ秒である。したがって、分解能長は光学ソース18からのテスト信号のパルス長に同等である。
【0048】
データ伝送光リンクの検知
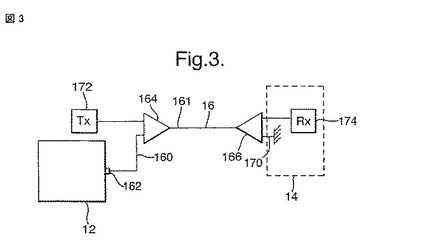
図3は、図1の光ファイバ又は他の伝送リンク16が、どのようにして波長分割多重様式でデータを伝送できるかを示している。伝送リンク16は、伝送リンクの検知部分161につながる結合ファイバ160によってコネクタ162で監視ステーション12に結合される。(監視側から離れた)リンク16の出力端で第2の波長カプラ166が設けられる一方、結合ファイバ160からの放射線はリンク16の入力端(つまり、監視側)で第1の波長カプラ164によってリンク16の中に導入され、その結果リンク16からの光は終端ファイバ170の端部に位置する端部反射器168に結合することができ、終端ファイバ170は、第2の波長カプラ166を反射器168に接続する。送信機ステーション172と受信機ステーション174は、それぞれ第1の波長カプラと第2の波長カプラ164、166に接続される。
【0049】
監視ステーション12からの放射線はファイバリンク16上を別の波長で伝送され、送信機ステーション172及び監視ステーション12からの放射線はリンク16内の共通のファイバ又は媒質上で送信される一方、波長カプラ164、166は、波長分割多重化技法を使用して、データを、ある波長で送信機ステーションと受信機ステーション172、174の間のリンク16上で送信できるようにそれぞれ構成されている。
【0050】
第2の波長カプラ166では、ソース18の波長での光はリンク16から、反射器168での反射時に放射線が反射され、監視ステーションへの帰還伝送のためにリンク16に戻される終端ファイバ170に向けられる。(結合ファイバ160、ファイバリンク16、及び終端ファイバ170によって形成されたファイバ経路に沿った外乱が検出されることがあるが)このようにして、通信に不当に影響を及ぼすことなくリンクが監視されているが、通信はリンク16に沿って発生し得る。代替実施形態では、干渉計20から信号ストリームが開始される結合ファイバは好ましくは単一ファイバであるが、通信リンク16は複数の光ファイバを有するケーブルである。このような状況では、結合ファイバ160はリンク16の伝送ファイバの内の1本に結合されるに過ぎず、そのファイバは反射器168に対向する端部で結合される。したがって、送信ステーション172と受信ステーション174の間の信号は依然として他の伝送ファイバ上で伝送でき、監視されているファイバでの外乱はケーブルにおける外乱を示している。
【0051】
前記説明から分かるように、通信のために使用されているファイバは、通信トラフィックがファイバによって伝送されている間に監視できる。ファイバ上で盗聴を試みる人物はファイバを取り扱うことによって物理的かく乱を引き起こす可能性が高い。外乱が発生すると、外乱のファイバに沿った位置が評価でき、盗聴者の位置を突き止めることができる。したがって、データ伝送に安全な伝送路を提供することが可能である。
【0052】
理論上の詳細
以下は、スカラー干渉計OTDR理論に少なくとも部分的に基づいて、前記実施形態の少なくともいくつかの態様の背景にある理論を説明している。外乱位置情報を示す目的で分散レイリー後方散乱信号を励起するために、パルス化されたプローブ信号を使用する干渉計OTDRの理論上の動作がやや関係している。問題は、最初に個別の反射器及び連続波励磁信号を考慮することにより最もよく理解される。
【0053】
形式
【数1】
【0054】
の「ポイント」外乱の場合。cw励磁の元で、センサの出力での「ac」項が以下によって与えられることを示すことができる。
【数2】
【0055】
ここでは、Tは試験中のファイバの開始からの反射ポイントの飛行時間であり、τは外乱のポイントまでの飛行時間である。Dは干渉計の不均衡な遅延である。
【0056】
形式
【数3】
【0057】
のシヌソイド変調外乱を考慮する場合には、方程式(1)は以下になる。
【数4】
【0058】
また、以下の形式にすることができる。
【数5】
【0059】
これは角度変化のための古典的な結果であり、第1の種類のベッセル関数を使用して評価できる。角度変化深さR2は、外乱の振幅a、位置τ、及び周波数ωmの関数であり、以下によって示される。
【数6】
【0060】
(2c)から、変化深さは時間と周波数...の以下の点での最小と最大を経る結果になる。
【数7】
【0061】
ここではnは範囲[−∞,∞]の中の整数である。
【0062】
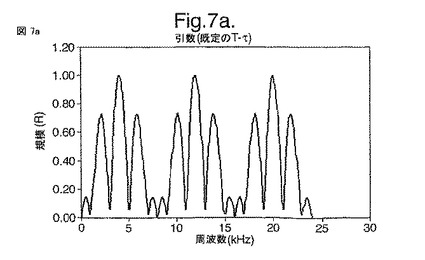
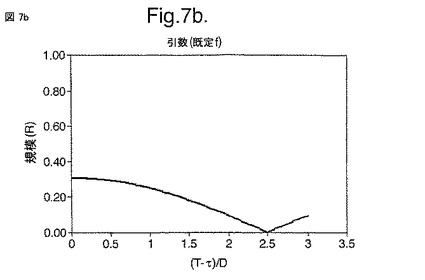
図7a、図7bは、特に4a=1、D=25km(遅延線は好ましくは少なくとも20kmとなるであろう)、T−τ=2D及びfm=0.8kHzの場合に、変調周波数、干渉計遅延D、及び相対外乱ロケーション(T−τ)/Dの多様な値のための方程式(2c)の例のプロットを示す。図7aは、センサの応答、つまりその感度が、事実上、外乱周波数の関数として、どのように外乱に対するファイバの非線形応答の影響を示すのかを示している。トレースAは低振幅外乱の場合であり、トレースBは高振幅外乱の場合である。
【0063】
パルス化プローブ信号:OTDR手法を調べる簡単な方法は、ここで、ファイバを、各反射がOTDR範囲分解能セル内に位置するn個の分散された反射を備えると見なすことである。セルサイズはOTDRプローブパルス(τw)の持続時間によって定義され、通常は(〜100m分解能に対応する)1μsである。各セルから反射された信号の振幅と位相は(セルへの/セルからの)ファイバ減衰の関数であり、成分散乱のアンサンブル平均のその中に集まる。
【0064】
各セルはここで前述された別々の反射の役割を引き受け、したがってTを定義する。事実上、TはポイントTiの集合の形を取り、i=1からnである。
【0065】
OTDRパルスプローブ信号
【数8】
【0066】
によって記述される励磁信号を導入するのであれば、結果として生じる信号の定式化はここで方程式(1)から導出できる。
【数9】
【0067】
ここでは、ziac(t)はセルiからの信号のac成分であり、
【数10】
【0068】
は、OTDRプローブパルスとi番目の範囲分解能セルの間の畳み込みである。
【0069】
注記すべき重要な点は、i番目のセルの中の散乱した信号からの無作為位相成分が検出プロセス(方程式4の||2演算子)で失われるため、それが結果を減じないという点である。
【0070】
したがって、方程式(4)は、OTDRで結果として生じる信号が、方程式(1)と(2)のより単純な定式化を使用して解釈できることを示している。しかしながら、OTDRトレースでのそれぞれの分解可能なポイントでの信号は、Tiの適切な値をこれらの方程式に代入することにより求められる。信号の振幅はインコヒーレントな(incoherent)OTDRシグネチャの特徴的な指数関数的減衰によっても修正される。
【0071】
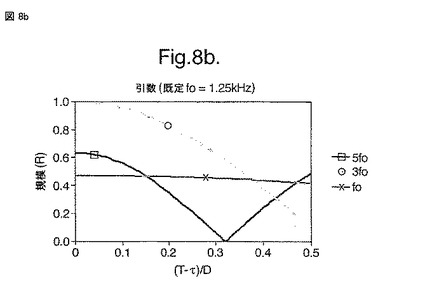
この単純なモデルは実際的な実験で見られるOTDRトレースの形状を説明している。図8aは、1.25kHzの周波数での外乱が位置Xに位置する単発の測定されたOTDRトレースを示している(水平軸は時間であり、垂直軸は干渉計段階からの(組み合わせ)信号のレベルである)。曲線(A)は、外乱の規模が小さいときの典型的な単一パルス応答を示す。パルスからパルスへ、レベルは、外乱が変化するにつれてトレースの全長に沿って上下に移動する。しかしながら、外乱振幅の増幅につれ、トレースはその長さ(曲線B)に沿った構造を示し始める。この構造はパルスからパルスへ上下に振動する(図8(a)は、〜D/2(D=25km)の長さのテストファイバからの測定されたOTDRトレースを示す。図8(b)は外乱のトーンの根本的な、及び最初の2つの奇数の(odd)高調波のための、外乱長分散(方程式2c)の理論上の規模を示している。
【0072】
このようにして(空間位置に対応する)時間位置Xでの外乱特長は、図6aから図6cの例に示されているように、変化は減少であるが、この例では激しい変化、ここ干渉信号では上昇であるが、減少であってもよい。
【0073】
長さ依存構造はモデリングによって予測される。図8bは、外乱の規模を拡大することによって生じるであろう奇数の調和振動数の関数として、結果として生じる変動深さ(方程式2c)の規模を示す。(T−τ)/Dは、外乱ポイント「X」とi番目の散乱領域間の距離に相当する。ファイバに沿ってちょうど半分を超えたポイントで5番目の高調波で明らかにヌル(null)がある。OTDRトレースは、理論により予測される特徴的な長さの分散変動を示す。
【0074】
位置情報を抽出するための信号処理:図8aのOTDRトレースは、ポイント外乱でさえ後方散乱シグネチャに沿って分散特長を生じさせることがあることを示している。しかしながら、重要な点は、外乱が発生するポイントでのシグネチャには常に突然の変化があるという点である。図6b及び図6cにこれを示している。これらのリアルタイムアナログ後方散乱信号は、OTDR範囲解像度(この場合には〜1μs)により決定される精度で外乱の始まりを配置できることを示している。したがって、信号処理システムは、2つの近接する範囲分解能セル(A)と(B)からの信号を比較することによってこれらの特長を探すように設計される。それらの間の差異を実行することによって、図8aに示されたさらにゆっくりとした構造が消える(近接セルは、それらの間に位置する外乱がない限り相関しない)。したがって、原則的には、いかなる数の同時外乱もこの技法によって位置を突き止めることができる。
【0075】
ウィンドウ検出器(図2)は、OTDRトレース上でレンジマーカ(又はブライトアップスポット)を生じさせるために特定の規模を超える(A−B)特長を選択するために使用できる。同様に、外乱の二次元「テレビ状ピクチャ」は形成できる。この場合、x方向はファイバに沿った距離に対応し、y方向は範囲分解能セルごとの外乱時間履歴に対応し、z変動はウィンドウ検出器出力によって駆動される。
【0076】
移動する車両の位置の検知
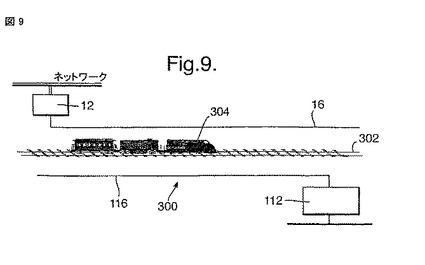
車両の位置を検知するため検知システム300は図9に示されている(前記図に関する類似する構成要素は類似する符号を有する)。ここでは、光ファイバケーブル16(伝送リンク)は、線路に沿って移動する列車304の位置を検知するために線路302に沿って延在する。ファイバケーブル16は一般的に線路302に平行な方向で延在し、好ましくは地中に、又は線路近傍のダクト内に埋設される。
【0077】
一端では、ファイバケーブル16は、ファイバケーブル16の物理的かく乱、特に動的外乱を監視するために、(図1に示されているもののような)監視ステーション12という形で監視装置に結合される。ファイバケーブルは、ファイバケーブル16中で動的外乱を引き起こすために、電車304の移動のための線路302に十分に近くに敷設され、その動的外乱は監視ステーション12で検知できる。列車により引き起こされる外乱は概して列車304に局所的となり、列車の移動外乱が、列車の速度に相当する速度でケーブル16に沿って移動する動的外乱を引き起こす結果となる。このようにしてファイバは、空間的に連続した様式での車両の移動を監視するセンサとしての機能を果たすことができる。
【0078】
ファイバケーブル16は、線路302の側部に沿って敷設され、ファイバケーブル16に到達するために地面を通って伝播する列車により生じた外乱のために、線路に十分近く、地下に又は既存のダクト内に埋設されてよい。ファイバケーブルは線路の下に敷設されてよいが、好ましくは、線路から1mの距離等、線路に隣接して敷設されるであろう。代わりに、線路のレールに沿って延在する穴又は溝が、ファイバケーブル16を受け入れるために設けられてよく、ファイバケーブル16はこのような穴又は溝に沿って延在する。一実施形態では、線路に沿った既存のダクトがケーブルを収容するために便利に使用されてよい。
【0079】
明らかに、ファイバケーブル16の移動する列車に対する感度は、ファイバ(又はダクト)と線路の間の距離、地面と土壌の状態、ケーブル特性等の、局所的な環境に依存する。したがって、システムの感度は全長ファイバ16に沿って一定ではない可能性がある。
【0080】
監視ステーション112は第1のファイバの端部を基準にして対向する端部に結合されるが、追加のファイバケーブル116は、第1のファイバ16に対するのと類似するように線路に沿って経路選択されてよい。したがって、列車が一方の監視ステーションから遠いとき、列車は他方の監視ステーションにより近くなる。一般的には任意の1本のファイバに沿った感度は、そのファイバのための監視ステーションからの距離が拡大するにつれ減少するため、これにより全体としてのシステムの感度は改善される。
【0081】
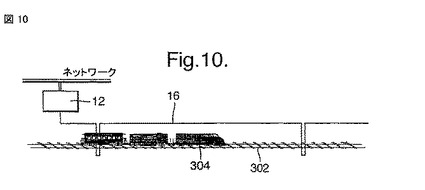
ファイバ16と線路の間の機械的な結合を高めるために、ファイバは1つ以上のポイントで横断方向で線路の下に敷設されてよい。好ましくはファイバ経路は、図10に示されているように線路の下に敷設された1つ以上のU字形の部分を有し、それによって互いに近い2つのポイントで横断方向で線路を交差する(複数のU字形の部分が線路の下に延在する場合、監視ステーションの空間的な分解能は、近接するU字形部分からの外乱が互いから区別できるように選ばれる)。
【0082】
複数のU字形の部分は、例えばステーション306の近傍で左右の配列で配置されてよく、ファイバはU字形の部分の間の線路に概して平行に延在する。ステーション領域から離れて、ファイバは概して線路に平行に並んで延在する。
【0083】
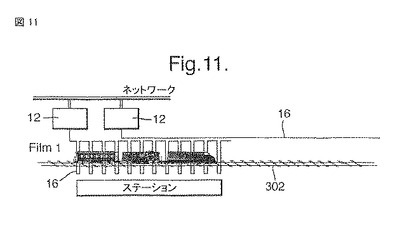
代わりに、図11に示されるように、線路に平行に延在する第2のファイバ116はステーション間の列車の位置を検知するために使用されてよいが、第1のファイバ16は、ステーション領域での使用のために複数のU字形状の部分として配置されてよい。
【0084】
通常、ファイバケーブルは、ステーション間の線路に概して平行な方向で、通常は1km以上の距離、好ましくは10km、延在し、その結果ファイバは少なくとも1km、あるいは10kmもの概して連続する距離での移動を検知できる。明らかに、センサシステムは概して連続的な距離よりも小さい分解能で位置を決定することができ、分解能は、光パルスの持続時間と列車又は他の車両から検出可能な外乱の伝播の範囲によって決定される。横断方向の部分が、ファイバの概して平行な部分の間に設けられても、好ましくは、少なくとも1km、好ましくは10km延在する、少なくとも1つの概して平行な部分が設けられるであろう。
【0085】
したがって、本実施形態により、1組の信号コピーの位相差を、干渉信号を形成するために結合でき、その結果外乱により引き起こされるファイバ内の時間変化する位相変化が、信号組(一方が他方の後を追う)の間の位相差を生じさせ、その位相差が干渉信号の中の振幅の変化に変換できることが分かる。
【0086】
まとめると、前記実施形態では、一連の低コヒーレンステストパルスが光リンクの中に入れられ、後方散乱帰還信号が監視される、光時間領域反射率測定法が使用される。テストパルスは不均衡マッハツェンダー干渉計を通過し、テストパルスごとに、1組の時間変位されたパルスコピーがリンクの上に開始される結果となる。後方散乱帰還信号は同じ干渉計を通過し、各組のパルスコピーに再調整させ、互いに干渉させる。時間変化外乱は、1組の各パルスコピーに異なる影響を及ぼす可能性がある。その結果、ステップ等の異常が後方散乱信号で発生する可能性がある。異常の時間位置から、関与する外乱の距離が評価される。
【図面の簡単な説明】
【0087】
【図1】本発明による、伝送リンクと光検知システムを示す図である。
【図2】図1のシステムとともに使用するための信号処理回路を示す図である。
【図3】図1のリンクの上にどのようにしてデータを多重化できるのかを示す図である。
【図4】受光器回路を示す図である。
【図5a】光学ソース回路を示す図である。
【図5b】あまり好ましくない別の光学ソース回路を示す図である。
【図6a】サンプル帰還信号の測定されたトレースを示す図である。
【図6b】サンプル帰還信号の測定されたトレースを示す図である。
【図6c】サンプル帰還信号の測定されたトレースを示す図である。
【図7a】理論上の曲線を示す図である。
【図7b】理論上の曲線を示す図である。
【図8a】測定された帰還信号を示す図である。
【図8b】複数の理論上の曲線を示す図である。
【図9】第1の実施形態で列車の位置がどのようにして検知できるかを示す図である。
【図10】第2の実施形態で列車の位置がどのようにして検知できるかを示す図である。
【図11】第3の実施形態で列車の位置がどのようにして検知できるかを示す図である。
【技術分野】
【0001】
本発明は、伝送リンク上の外乱(disturbance)の位置を、特に外乱が時間変化外乱である場合に評価するための方法及び装置に関する。
【背景技術】
【0002】
導波管内の不整の位置を、導波管内でテストパルスを開始し、もしあれば、帰還信号の時間依存性の異常を検出するためにテストパルスの分散された後方散乱を監視することにより、推定することが公知である。異常の例は帰還信号の時間に依存した振幅の階段状変化となるであろう。しかしながら、このような公知の光時間領域反射率測定法(OTDR)技法は時間変化外乱を検出するのに適していない。
【発明の開示】
【0003】
本発明によると、伝送リンク上での時間変化外乱(disturbance)の位置を評価する方法が提供される。この方法は、1組の信号コピーがあるようにソースから出力信号を少なくとも部分的にコピーするステップと、伝送リンク上に信号コピーを送信するステップと、伝送リンクから、以前にその上で送信された帰還信号コピーを少なくとも部分的に受信するステップと、組み合わせ信号を生じさせるために送信された組の受信信号コピーを組み合わせるステップと、通信リンク上での外乱の位置を評価するために組み合わせ信号の時間特性を使用するステップと、を含む。
【0004】
出力信号のコピーは組み合わせ信号を生じさせるために結合されるため、これらのコピーの内の少なくとも1つの修正は組み合わせ信号の変化を生じさせ、それにより時間変化外乱の評価を促進する可能性が高い。
【0005】
好ましくは、伝送リンクは光ファイバのような光導波管であろう。リンクの動的外乱又は他の時間変化する外乱は、通常、音響振動又は他の振動のような物理的かく乱であろう。物理的かく乱は伝送リンクの光媒質の歪み又は弾性波を生じさせ、それによりリンクに沿って移動する信号コピーの内の少なくとも1つの位相を変更する可能性が高い。動的外乱は静止している、つまり定常点に位置してもよい。代わりに動的外乱は光導波管に沿って移動してもよい。
【0006】
好ましくは、信号は、例えばレイリー後方散乱等の分散後方散乱のプロセスにより返され、その結果この信号は、信号が導波管に沿って伝播するにつれて漸次的に返される。通常、これは経時的に分散される組み合わせ信号を生じさせる。好ましくは、組み合わせ信号はその中の外乱特長を検出するために監視され、その外乱特長から外乱の存在が推論されてよい。
【0007】
外乱特長の一例は、例えば時間に関する階段状変化(step change)等、組み合わせ信号の振幅の変化であってよい。組み合わせ信号はトレース式で時間の関数としてディスプレイ装置に表示されてよく、外乱の発生をトレースから視覚的に推論できるようにする。しかしながら、組み合わせ信号は外乱特長のさらに微妙な特性を検出するために分析されてよい。
【0008】
組み合わせ信号の時間特性は、外乱特長と関連付けられた再帰時間、特に外乱特長に関与する(いったん結合された)帰還信号コピーの到着時間であってよく、この時間は、物理的かく乱の位置まで、及び物理的かく乱の位置から光が伝播する、往復時間である。一実施形態では、ソースからのパルスが時間分散組み合わせ信号を生じさせ、組み合わせ信号は基準時間からの経過時間の関数として監視され、その基準時間は、パルスが発生する時間に関連する。
【0009】
ソースからの出力信号は、好ましくは不規則な成分を有し、その場合ソースから出力信号を少なくとも部分的にコピーするステップは、好ましくは、不規則な成分が1組の信号コピーのそれぞれに共通となる結果をもたらす。信号の他の特性は、それぞれの信号コピーで同じである必要はない。例えば、信号コピーは異なる振幅を有してよい。不規則な成分は好ましくは無作為又は擬似ランダム(擬似ランダムによって、理論上、成分が予測可能であっても、実際にはこれを行うために必要とされる時間又は処理能力により予測することが不可能になることが意味される)であろう。出力信号が波形を有する場合、波形が無作為に発生する位相変化を有する場合には、不規則な成分は波形の位相により提供されてよい。波形は便宜上、好ましくは10ピコ秒未満、あるいは1ピコ秒未満である、短いコヒーレンス時間を有する光学ソースにより提供されてよい。組み合わせ信号は好ましくは2つの波形の干渉又は混合から生じる干渉信号となる。
【0010】
好ましくは、信号コピーは互いを基準にした時間遅延を伴い伝送リンクに沿って送信され、その結果、先導するコピーと後続のコピーがある。次に、返される先導コピーは、以前の後続コピーを基準にして遅延することがあり、その結果両方のコピーは、実質的に互いとと歩調を合わせて結合できる。
【0011】
好ましい実施形態では、これは不均衡マッハツェンダー干渉計のような干渉計の段階を使用して達成される。好ましい実施形態では、光学ソースからの出力は干渉計に送られ、そこで信号はコピーされ、1つのコピーが干渉計の1つの経路に向けられ、その結果信号コピーが干渉計段階から送信される時間との間で相対的な結果遅延又は遅延差結果が生じるように、各経路と関連付けられた遷移時間は異なる。外部方向で課される相対遅延は戻り方向で課される相対遅延と同じとなり、これは各ケースで2つの経路の遷移時間の差異により決定されるため、同じ干渉計段階は、次に帰還信号コピーを特に便利な方法で再調整するために利用できる。
【0012】
遅延差は、好ましくは少なくとも部分的にソースの平均コヒーレンス時間に依存して選ばれる。遅延差は好ましくはコヒーレンス時間よりはるかに長くなる。好ましくは、コヒーレンス時間対遅延差の比率は103より大きい又は等しくなるが、好ましくは105、又はさらに好ましくは107となるであろう。
【0013】
出力信号をコピーするステップと、信号を送信するステップは、好ましくは第1のロケーションで実行され、外乱は第1のロケーションから少なくとも1km又は少なくとも10kmの距離でも検出可能なままである。
【0014】
伝送リンクは誘導トラックに沿って延びる光チャネルを含んでよく、誘導トラックは移動する車両の動きを誘導するように構成される。このようにして、伝送リンクは伝送リンクに沿って移動するように誘導された車両の動きを監視するために使用されてよい。
【0015】
好ましくは、光チャネルはトラックに対して機械的に結合された関係にあり、その結果車両の動きが光チャネルに沿った外乱を引き起こす。光チャネルはトラックに直接的に結合される必要はなく、例えば地面を介して間接的に結合されてよい。例えば、光チャネルは、必ずしも固定されずにトラックに隣接する地面上、又はダクト内にあるだけでもよい。しかしながら、機械的な結合のため、振動又はトラックに沿った車両の動きにより生じた音響外乱のような他の外乱が、伝送リンクで(減衰されている、あるいは修正されているとしても)対応する外乱を引き起こす可能性があり、この外乱は車両と同じ速度で連続してリンクに沿って移動する。
【0016】
光チャネルに対する音響結合は特定の結合点で強化される必要はない(が、強化されてもよい)ため、及び代わりにトラックとチャネル間の媒質によって提供される連続的な結合で通常十分であるため、既存のトラック側ファイバケーブルにより提供される光チャネルは便利に使用されてよい。代わりに、既存のトラック側のダクト内に設置される新しいケーブルが利用されてもよい。
【0017】
誘導トラックは、好ましくは1つ以上のレールの形式を有し、そのレールは通常列車の動きを誘導する。列車によって生じる振動が大きくなり、それによりこのような車両の位置をさらに容易に検出できるようにする可能性があるため、この構成は特に便利である。
【0018】
本発明の追加の態様は添付の特許請求の範囲に提供される。本発明は、以下の図面を参照してほんの一例としてさらに詳しく後述される。
【発明を実施するための最良の形態】
【0019】
外乱の位置の推定
図1は、監視ステーション12が光ファイバ16に接続されている検知システム10を示す。ファイバに沿ったロケーションが決定されなければならない動的外乱(disturbance)が、Xと呼ばれるポイントでファイバに導入される。大まかに言えば、監視ステーション12は、ファイバ16の上に検知信号を送信するように構成され、その検知信号は動的外乱によって位相変化を被る。検知信号の成分は、ファイバに沿ってレイリー後方散乱のプロセスにより返される。監視ステーション12に返される後方散乱成分は、次に、動的外乱により引き起こされた位相変化を区別するために処理される。ファイバの異なる領域から返される後方散乱成分は異なるときに監視ステーション12に達するため、外乱の位置は変調済みの後方散乱成分の帰還時から決定される。
【0020】
監視ステーション12は、短いコヒーレント時間(出力での無作為な位相変化が信号に不規則な成分を提供する)の光パルス源18を含み、パルス源はドライバユニット118によって駆動されている。光学ソース18からのパルスは、干渉計段階20、ここでは第1の経路24と第2の経路26を備えるマッハツェンダー干渉計に送られ、経路24、26はそれぞれの第1の結合段階と第2の結合段階28、30によってそれぞれの端部で結合される。外部方向で移動する光の場合、第1の結合段階28は指向性のパワー(強度)スプリッタの機能を果たし、光学ソース18から経路24、26のそれぞれに光を向け、各経路に対する電力は所定の方法で共用される(ここでは、異なる比率も試用できるであろうが、第1の結合段階が50:50のパワースプリッタとしての機能を果たす)。
【0021】
このようにして、光学ソース18によって提供される各パルスの場合、そのパルスは、第1のコピーと第2のコピーがあるようにコピーされ、第1のコピーと第2のコピーはこの例では互いの複製である。他方のコピーは第2の経路26に沿って移動するが、一方のコピーは第1の経路24に沿って移動する。第2の結合段階30は干渉計の出力35に結合され、この出力はファイバ16に接続される。第2の結合段階30は、外部方向で移動する光のためのコンバイナとしての機能を果たし、第1の経路と第2の経路から干渉計出力35に光を向ける。干渉計の第1の経路は、第1の結合段階と第2の結合段階28、30の間でそれに沿って移動する光の遷移時間を増加するための遅延段階34を有し、結合段階28、30の間で移動する光の遷移時間は、第2の経路26に沿ってより第1の通路24に沿っての方が長くなる。したがって、光学ソースにより生じる各パルスにとって、干渉計20は遅延時間Dにより、他のパルスコピーを基準にしてパルスコピーの内の1つを遅延するのに役立ち、パルスコピーは互いに対して異なるときに光ファイバネットワーク16に送信される。
【0022】
戻り方向で移動する信号の場合、第2の結合段階30は、(光学ソース18から)順方向での光に対する第1の結合段階28の作用と同様にパワースプリッタとして機能を果たす。このようにして、帰還信号の強度は第2の結合段階30で分割され、他方の部分は第2の経路26に沿って向けられるが、一方の部分は第1の経路24に沿って向けられる。第1の結合段階28は、次に戻り方向の第1の経路と第2の経路からの光を結合する働きをし、結合された光を干渉(組み合わせ)信号として、第1の結合段階28の出力に結合された信号処理システム29に向ける。
【0023】
信号処理システムは、光信号を電気信号に変換するために第1の結合段階28に結合された受光器51と、受光器51から電気信号を受信し、電気信号をフィルタリングするためのフィルタ52と、フィルタリングされた電気信号を処理するための第1の信号処理ユニット54と、電気信号のさらに詳細な処理を実行するための任意のさらなる処理ユニット540とを含む。フィルタ52の帯域幅(約1MHz)は、外部騒音を最小限に抑えるために予想信号の帯域幅に適合される。
【0024】
受光器51は、図4にさらに詳細に示されている。カプラ28からの光は、可変利得電流帰還増幅器706に送られる前に、フォトトランジスタ702、ここではバッファとしての役割を果たすバイポーラトランジスタ704に送られる、電気的な出力を生じさせるPIN−FETに入射する。光源18は幅広く円滑なパワースペクトル及び約0.5ps以下という短いコヒーレント時間を有するため、光源18は発光ダイオード、エルビウムでドーピングされたファイバ増幅器等の増幅された自然放出のソース、半導体光増幅器、又はスーパー発光ダイオード(Super Luminescent Diode)であってよい。しかしながら、図5に関して後述されるように、ファブリー−ペローレーザダイオードが好ましい。
【0025】
光学ソースにより生じる放射線は非偏光であってよい、あるいは代わりに、光が干渉計に入射される前に、光を偏光解消するために偏光解消ユニット43が光源と干渉計の間に設けられてよい(偏光解消ユニットは例えばファイバリオ偏光解消器(de−polarizer)であってよい)。偏光コントローラ又は偏光解消器49は、干渉計の経路の内の1つ、ここでは第1の経路に設けられてよく、その結果第1のカプラ28での戻り方向で結合する第1の経路からの光の偏光は、少なくとも部分的に他方の経路からの光の偏光と位置合わせされている。偏光解消器は、帰還後方散乱信号における任意の偏光構造を効果的にスクランブルし、損失欠陥を検出するのをはるかに容易にするという利点も有する。
【0026】
通常、ソースは、標準的な電気通信光ファイバを効率的に使用するために1ミクロンから2ミクロンの間、好ましくは約1.3ミクロン又は1.55ミクロンの波長で動作し、このようなファイバはこの波長での単一モード伝送を支持するように構成されている。通常、ファイバは約9ミクロン又は10ミクロンである直径の単一コアを有する。
【0027】
監視ステーション12の動作は、ファイバ上の特定のポイントから返される、外に向かうパルスコピーの帰還成分を考慮することによって最もよく理解できる。ソース18によって生じるパルスごとに、4つの結果として生じる信号がある。つまり、順方向と逆方向両方で干渉計20の第2の経路26に沿って移動した遅延していない(non−retarded)信号S0、順方向で(しかし、逆方向ではなく)遅延D分遅延された第1の遅延信号S1、逆方向で(しかし、順方向ではなく)遅延D分遅延された第2の遅延信号S2、及び遅延2D分遅延された二倍遅延信号S3であって、信号S3は順方向と逆方向のそれぞれで遅延する。
【0028】
一方向で遅延した第1の遅延信号と第2の遅延信号S1、S2だけが、同時に第1の結合段階28に返される。ファイバ16に任意のいかなる外乱もない場合、これらの信号は互いのコピーであり(つまり同じ位相又は同じ位相変化を有し)、信号は第1の結合段階28で干渉する、あるいはそれ以外の場合建設的に結合する。しかしながら、信号S1、S2の組の一方が、(動的外乱で起こる可能性があるように)組の他方を基準にして修正される場合、信号S1、S2はもはや建設的に干渉しない。これは、第1の結合段階からの干渉信号の変化を生じさせる。特に、信号S1、S2の相対的な位相変化は、第1の結合段階の出力での干渉信号の振幅変化を生じさせる。
【0029】
ファイバを通って移動する光の位相変化は通常、物理的動乱によって達成される。これは、(例えば変位、音波又は超音波あるいは他の振動によって引き起こされる)物理的動乱が、光ファイバ又は他の光リンクの伝送特性の変化を生じさせる可能性があるためである。特に、衝撃によって引き起こされる等の物理的動乱は、屈折率及び偏光の変化、又は物理的な長さの変化、あるいはこれらの組み合わせのいずれかによって、ファイバの光伝播媒質(通常は、ファイバのシリカガラスコア)の不自然な領域における光路長を変更する、時間変化歪みを生じさせる可能性がある。
【0030】
ソースにより生じるパルスごとに、干渉信号がファイバに沿ってパルスコピーの遷移時間に対応する時間に渡って分散される。図8aのトレースAは、送信されたパルスから生じる干渉信号(I)が、ソースからのパルスの伝送からの経過時間に伴いどのように変化するのかを示している(トレースBはさらに強力な外乱用である)。ここでは、トレースに沿った各ポイントは、関与する信号が返されたファイバに沿った位置に一致する。
【0031】
当初、パルスコピーは後方散乱又は損失を通してほとんど減衰を被らないであろう。したがって、パルスの強度に関係する後方散乱成分の強度は高く、干渉信号も高い。パルスコピーがファイバに沿って移動するにつれ、後方散乱成分だけではなくパルスも減衰され、干渉信号は時間とともに減少する結果となる。
【0032】
時間t1の後、帰還後方散乱成分が、位置Xを超えて移動してきたパルスから生じるであろう。パルスコピー又は後方散乱成分が位置Xを通過すると、パルスコピーから生じる後方散乱成分の位相は外乱により影響を及ぼされる。外乱は時間とともに変化するため、パルスの既定の組の後方散乱成分の相対的な位相は変化し、時間t1での干渉信号に急な変化を生じさせる。同様に、Xを超えて移動してきたパルスの帰還成分も影響を受けるであろう。したがって、時間t1後、トレースは階段状にシフトされたままとなる。時間t1は第1の検知位置へ向かい且つ戻る往復時間に相当するため、ポイントXのファイバ経路に沿った距離はt1の値(又は、オフセット、例えば干渉計の遅延線34によるオフセットを含む基準時間を基準にした値t1)から推論できる。
【0033】
図8aのトレースを見るために、処理ユニット54は、プロセッサ/メモリ回路55を含む。プロセッサ/メモリ回路は、ソース18を駆動する電気パルス信号にアクセスするために光学ソース18のドライバ118に接続される。プロセッサ/メモリ回路は、ソースからの各パルスの伝送の後に経過した時間を示すタイマユニット57を含み、タイマユニットは、新しい光パルスが開始されると、パルス信号を使用してリセットするように構成されている。プロセッサ/メモリ回路55は、電気ドメインにおいて干渉信号を受信するため、及びパルスの発生からの経過時間の関数として各パルスからの信号を記憶するために、帯域通過増幅器51に接続されている。時間の関数として干渉信号を記憶するためには、プロセッサ/メモリ回路55は干渉信号を周期的にサンプリングし、関連付けられた再帰時間とともに各サンプルを記憶するように構成される。記憶された干渉信号は、次に、観察器101で見ることができる。しかしながら、干渉信号は例えば陰極線管の残留磁化(remnance)を通して等、一時的に記憶されてよい。
【0034】
ソースからのパルスは、好ましくは1msごとに繰り返し送信され、各パルスの持続時間は1μsである。代わりに、さらに高い解像度の場合、パルスは0.5μsの長さであってよい。
【0035】
さらに短い長さの場合、及び外乱が小さい(つまり、ファイバ位相変化が線形に応答する)ときには、干渉計システムは、外乱周波数が低いとあまり敏感ではないため、遅延線は、好ましくは少なくとも20kmとなる。(約100μsという遅延に相当する)約20kmという遅延線を用いると、パルスは通常、1msごとに送信された1μs期間であるため、パルス(信号)コピーは、それらがファイバに沿って移動するにつれて空間的にはっきりと区別できるようになる。しかしながら、さらに長いパルス、又は遅延がさらに短い場合には、信号コピーが互いの上にある可能性がある。連続信号の場合、連続信号は連続波形として継ぎ目なく接合されるため、信号はそれぞれ別個のエンティティではない。
【0036】
一実施形態では、外乱の発生は、まず、子端末局(outstation)14に位置するファイバの鏡端面32から反射された連続光信号を使用して検出される。本来、図1の装置は、パルスよりむしろ連続信号を生じさせるソースと共に使用できる。信号は子端末局から返され、パルスと同様に干渉計で再結合される。しかしながら、連続信号を用いる場合、後方散乱パルスに必要とされる帯域幅より低い帯域幅(約100kHz)を有する帯域通過増幅器52が使用でき、干渉信号の雑音がより少なく、それにより外乱のより敏感な検出を可能とする結果となる。さらに、連続信号を用いると、外乱の検出に位置解像度が必要とされないため、帰還信号はある期間に渡って積分できる。いったん外乱が検出されると、その位置は前記に説明されたように確立できる。それにも関わらず、図8aから明らかであるように、連続信号よりむしろパルスを使用して外乱の発生自体を決定できる。
【0037】
図2は、追加の信号処理ユニット540を示す。第1信号処理ユニット54と同様に、追加の信号処理ユニット540は、光時間領域反射率測定法(OTDR)に基づいて、リンク16に沿った1つ以上の外乱の距離を評価するために適切である。図1では、追加の信号処理ユニット540は第1の処理ユニット54に対する追加ユニットとして示されているが、実際には、追加の処理ユニット540だけが監視ステーションで実現されてよい。
【0038】
大まかに言えば、追加の信号処理ユニット540は、第2のロケーションから発する干渉を使用して第1のロケーションから生じる干渉信号を処理するように構成され、第2のロケーションは第1のロケーションの上流に(つまり、第1のロケーションより監視ステーションのより近くに)配置される。実際には、これは、第1の時間に、及び第2の時間に帰還信号をサンプリングし、2つのサンプリングされた信号の差異を評価することにより行われる。この手法は、パルス(及びその帰還成分)が第2のロケーションに達するために第1のロケーションを通過するため、第1のロケーションからの干渉信号が第2のロケーションからの寄与を含むことがあることを認識している。不必要な処理を回避するために、各ロケーションは(パルス時間幅により決定される)分解能セルと関連付けられ、第1のロケーションと第2のロケーションは近接する分解能セルに対応する。ファイバの長さに沿った隣接する分解能セルからの干渉信号の間の差異は、このようにして評価できる。
【0039】
信号処理ユニット540は、サンプリングユニット542、ここではアナログ微分サンプル保持回路を含み、この回路は入力543でフィルタ52に接続される。サンプリングユニット542は、MZカプラ28から、特に同様に受光器51から信号を受信するフィルタ52から、入信信号をサンプリングするように構成される。サンプリングユニット542は、相隔たる時間位置で入信信号をサンプリングするように構成されたサンプリング段階544と、相隔たる位置で以前にサンプリングされた信号を位置合わせするための位置合わせ段階546と、再調整された信号を、特に信号間の差異を評価するために比較するための比較段階548とを含む。比較段階548からの信号は、特に比較段階548からの出力信号が閾値を超えて中心値から逸脱する場合に、信号出力552で出力を生じさせるように構成されたウィンドウ検出器回路550に渡される。
【0040】
タイミング制御回路560は、各トリガ信号に応えてソースがパルスを発するように、光学ソース18のドライバユニットをトリガするためのトリガ信号561を提供するために含まれる。タイミング制御回路560は、サンプリングユニット、特にサンプリング段階544と546の動作を制御する、クロックパルス562も生じさせる。トリガ信号561及びクロックパルス562は、例えばクロック回路であってよい共通のタイミングソース564によって生成される。トリガ信号561は、トリガ出力566でタップされてよく、オシロスコープ568のトリガに送られる。信号出力552は、次に、好ましくは記憶装置オシロスコープであり、ディスプレイ570上で見られるオシロスコープ568の信号入力に送ることができる。ラスタ回路572aは、二次元ディスプレイを生成するためにオシロスコープに送信できるラスタ信号を生成するために設けられてよい。追加のゲート575と577は、図2に示されるようにタイミング制御回路に含まれている。
【0041】
本例のクロックパルスは0.5MHzという周波数であり、交互位相タイプである。つまり、ある波列(wave train)が1つの位相562aで生成され、別の波列が180°の移相で生成される。タイミング制御回路は、クロック位相が光学ソース18へのトリガパルスごとに交替し、二次元ディスプレイを生成するためにラスタジェネレータを同期するようにも構成される。二次元表現により、ファイバの各位置からの後方散乱信号の時間−進化を、記憶装置オシロスコープ568のディスプレイ570で観察できるようになる。デジタル電子とアナログ電子は、別々の、調整され、減結合された電源(図3では、下向きの矢印が接地又は負の供給レールへの接続を示すが、上向きの矢印が正の供給レールへの接続を示す)を使用した。
【0042】
さらに詳細には、サンプリングユニット542は、入力信号(つまりOTDR信号又は電気ドメイン内の干渉信号に同等な信号)のコピーを生成するための、単純な「T」コネクタであるであろうコピー段階572を含む。サンプリング段階544は、2つのサンプリング増幅器A、Bを有し、それぞれのパルスユニット574、576によってサンプリングするようにそれぞれがトリガされ、パルスユニットはタイミング制御回路560からのクロックパルスを与えられる。コピーAとBはそれぞれ増幅器A、Bに入り、それぞれの控えめの時間(discreet-time)パルス振幅コピーが生成される。パルスユニット574、576は、2つのコピー(AとB)のサンプリング例が、範囲分解能間隔、ここでは1マイクロ秒でオフセットされるように構成される。サンプリング増幅器A、Bからの信号は、次に、それぞれ位置合わせ段階546の追加のサンプリング増幅器A’及びB’に渡され、これらのサンプルは次に再サンプリングされる。
【0043】
追加のサンプリング増幅器A’、B’又は同等にサンプリングするゲートは、それぞれのパルスユニット578、579によってトリガされる(パルスユニット578、579は、タイミング制御ユニット560からのクロックパルスで駆動されている)。追加の増幅器A’、B’は、Aコピーの再サンプリングされた信号がBコピーのサンプリングされた信号に先行するように(パルスユニット578、579のタイミングを通して)動作される。これは、Aサンプルは、B信号にただちに先行する範囲分解能セルから生じることを意味する。この再サンプリング戦略の結果、サンプリングポイントは(光学ソースによってファイバリンク16の上に当初送信されたパルスは、持続時間が1マイクロ秒であると想定して)2マイクロ秒というステップサイズであるが、ファイバリンク16(1マイクロ秒に相当する距離分、分離される)に沿って「歩行する(walk)」。
【0044】
比較段階548は、二回サンプリングされた信号AとBの間の差異を評価するための差動増幅器549を含む。つまり、差動増幅器の出力はA−Bに関する出力を示す。AトレースとBトレースは比較される前に再調整されるため、信号の時間依存性の傾き又は勾配に関する値が得られると考えられてよい。事実上、時間依存サンプリングされた信号は区別される。つまり、(サンプルは、必ずしも即座に隣接するサンプルである必要はないが)隣接するサンプル間の差異が評価される。
【0045】
受光器51は図4にさらに詳細に示されている。カプラ28からの光は、可変利得電流帰還増幅器706に送られる前に、ここではバッファとしての役割を果たすバイポーラトランジスタ704に送られる電気出力を生じさせるPIN−FETである、フォトトランジスタ702に入射する。図5aでは、好ましい光学ソース18がさらに詳しく示されている。(干渉計段階を通した)リンク16への伝送のための光はファブリーぺロレーザ710によって生成される。タイミング制御回路560からのトリガ信号561は、トリガ信号が受信されるたびにパルスを生成する単安定パルス発生ユニット712で受信され、このパルスは、レーザ710を駆動するためにブースタ増幅器714によって増幅される。図5bは、DFBレーザが使用される代替策を示す。しかしながら、DFBレーザがコヒーレンス雑音、及び不安定性を引き起こすことがあることが判明している。
【0046】
図6a、図6b及び図6cは、信号処理ユニット540の多様なポイントでのサンプリング波形を示す。図6aは、パルス振幅変調済みのサンプリング波形AとBを基準にした、規則正しい(再)サンプリングパルスの位置を示す。図6aでは、繰り返すサンプルパルス720が示されている(最も濃い線)。Bサンプリング信号(すなわち、増幅器Bからの出力)はより薄い線724で示されているが、Aサンプリング信号(増幅器Aからの出力)は灰色の線722で示される。「A」トレースから分かるように、後方散乱信号の振幅は、通常OTDRで予想されるように、(光学ソースからのテストパルスの始まり以来の)経過時間が延びるにつれて減少する。「B」トレース724の振幅は同様に経過時間とともに減少するが、Aトレースを基準にしてシフトされる。
【0047】
図6bでは、再サンプリングされた信号AとB(つまり、サンプリング増幅器A’とB’からの出力)が示され、Bサンプルはより薄いトレース728であるが、Aサンプルは濃いトレース726である。2つの信号は再サンプリングされたため、前述されるように、これらはここで位置合わせされる。A再サンプリング信号とB再サンプリング信号の差異(つまり、比較段階548からの出力(A−B))は、薄い方のトレース730によって示されている。このトレースでの外乱を示す明白な特長はないが、図6cの(A−B)トレースは、明らかに約165マイクロ秒(曲線AとBの階段状変化に相当する時間)で特長を示している。図6bと図6cのトレース間の差異は、サンプリング増幅器を駆動するクロック信号が図6bでゼロ移相を有するが、図6cでは180度の移相を有するという点である。これは、1つの位相でのクロック信号で第1の(A−B)トレース、及び180°オフセットされた位相でのクロックでの別の(A−B)トレースを生成することによって、1つのトレースでのサンプリングセルの間のギャップが、1セル長分、シフトされるセル内でサンプリングすることにより、どのようにして効果的に削除できるのかを描いている。このようにして、本実施形態の分解能は、100メートルの長さに相当する1マイクロ秒である。したがって、分解能長は光学ソース18からのテスト信号のパルス長に同等である。
【0048】
データ伝送光リンクの検知
図3は、図1の光ファイバ又は他の伝送リンク16が、どのようにして波長分割多重様式でデータを伝送できるかを示している。伝送リンク16は、伝送リンクの検知部分161につながる結合ファイバ160によってコネクタ162で監視ステーション12に結合される。(監視側から離れた)リンク16の出力端で第2の波長カプラ166が設けられる一方、結合ファイバ160からの放射線はリンク16の入力端(つまり、監視側)で第1の波長カプラ164によってリンク16の中に導入され、その結果リンク16からの光は終端ファイバ170の端部に位置する端部反射器168に結合することができ、終端ファイバ170は、第2の波長カプラ166を反射器168に接続する。送信機ステーション172と受信機ステーション174は、それぞれ第1の波長カプラと第2の波長カプラ164、166に接続される。
【0049】
監視ステーション12からの放射線はファイバリンク16上を別の波長で伝送され、送信機ステーション172及び監視ステーション12からの放射線はリンク16内の共通のファイバ又は媒質上で送信される一方、波長カプラ164、166は、波長分割多重化技法を使用して、データを、ある波長で送信機ステーションと受信機ステーション172、174の間のリンク16上で送信できるようにそれぞれ構成されている。
【0050】
第2の波長カプラ166では、ソース18の波長での光はリンク16から、反射器168での反射時に放射線が反射され、監視ステーションへの帰還伝送のためにリンク16に戻される終端ファイバ170に向けられる。(結合ファイバ160、ファイバリンク16、及び終端ファイバ170によって形成されたファイバ経路に沿った外乱が検出されることがあるが)このようにして、通信に不当に影響を及ぼすことなくリンクが監視されているが、通信はリンク16に沿って発生し得る。代替実施形態では、干渉計20から信号ストリームが開始される結合ファイバは好ましくは単一ファイバであるが、通信リンク16は複数の光ファイバを有するケーブルである。このような状況では、結合ファイバ160はリンク16の伝送ファイバの内の1本に結合されるに過ぎず、そのファイバは反射器168に対向する端部で結合される。したがって、送信ステーション172と受信ステーション174の間の信号は依然として他の伝送ファイバ上で伝送でき、監視されているファイバでの外乱はケーブルにおける外乱を示している。
【0051】
前記説明から分かるように、通信のために使用されているファイバは、通信トラフィックがファイバによって伝送されている間に監視できる。ファイバ上で盗聴を試みる人物はファイバを取り扱うことによって物理的かく乱を引き起こす可能性が高い。外乱が発生すると、外乱のファイバに沿った位置が評価でき、盗聴者の位置を突き止めることができる。したがって、データ伝送に安全な伝送路を提供することが可能である。
【0052】
理論上の詳細
以下は、スカラー干渉計OTDR理論に少なくとも部分的に基づいて、前記実施形態の少なくともいくつかの態様の背景にある理論を説明している。外乱位置情報を示す目的で分散レイリー後方散乱信号を励起するために、パルス化されたプローブ信号を使用する干渉計OTDRの理論上の動作がやや関係している。問題は、最初に個別の反射器及び連続波励磁信号を考慮することにより最もよく理解される。
【0053】
形式
【数1】
【0054】
の「ポイント」外乱の場合。cw励磁の元で、センサの出力での「ac」項が以下によって与えられることを示すことができる。
【数2】
【0055】
ここでは、Tは試験中のファイバの開始からの反射ポイントの飛行時間であり、τは外乱のポイントまでの飛行時間である。Dは干渉計の不均衡な遅延である。
【0056】
形式
【数3】
【0057】
のシヌソイド変調外乱を考慮する場合には、方程式(1)は以下になる。
【数4】
【0058】
また、以下の形式にすることができる。
【数5】
【0059】
これは角度変化のための古典的な結果であり、第1の種類のベッセル関数を使用して評価できる。角度変化深さR2は、外乱の振幅a、位置τ、及び周波数ωmの関数であり、以下によって示される。
【数6】
【0060】
(2c)から、変化深さは時間と周波数...の以下の点での最小と最大を経る結果になる。
【数7】
【0061】
ここではnは範囲[−∞,∞]の中の整数である。
【0062】
図7a、図7bは、特に4a=1、D=25km(遅延線は好ましくは少なくとも20kmとなるであろう)、T−τ=2D及びfm=0.8kHzの場合に、変調周波数、干渉計遅延D、及び相対外乱ロケーション(T−τ)/Dの多様な値のための方程式(2c)の例のプロットを示す。図7aは、センサの応答、つまりその感度が、事実上、外乱周波数の関数として、どのように外乱に対するファイバの非線形応答の影響を示すのかを示している。トレースAは低振幅外乱の場合であり、トレースBは高振幅外乱の場合である。
【0063】
パルス化プローブ信号:OTDR手法を調べる簡単な方法は、ここで、ファイバを、各反射がOTDR範囲分解能セル内に位置するn個の分散された反射を備えると見なすことである。セルサイズはOTDRプローブパルス(τw)の持続時間によって定義され、通常は(〜100m分解能に対応する)1μsである。各セルから反射された信号の振幅と位相は(セルへの/セルからの)ファイバ減衰の関数であり、成分散乱のアンサンブル平均のその中に集まる。
【0064】
各セルはここで前述された別々の反射の役割を引き受け、したがってTを定義する。事実上、TはポイントTiの集合の形を取り、i=1からnである。
【0065】
OTDRパルスプローブ信号
【数8】
【0066】
によって記述される励磁信号を導入するのであれば、結果として生じる信号の定式化はここで方程式(1)から導出できる。
【数9】
【0067】
ここでは、ziac(t)はセルiからの信号のac成分であり、
【数10】
【0068】
は、OTDRプローブパルスとi番目の範囲分解能セルの間の畳み込みである。
【0069】
注記すべき重要な点は、i番目のセルの中の散乱した信号からの無作為位相成分が検出プロセス(方程式4の||2演算子)で失われるため、それが結果を減じないという点である。
【0070】
したがって、方程式(4)は、OTDRで結果として生じる信号が、方程式(1)と(2)のより単純な定式化を使用して解釈できることを示している。しかしながら、OTDRトレースでのそれぞれの分解可能なポイントでの信号は、Tiの適切な値をこれらの方程式に代入することにより求められる。信号の振幅はインコヒーレントな(incoherent)OTDRシグネチャの特徴的な指数関数的減衰によっても修正される。
【0071】
この単純なモデルは実際的な実験で見られるOTDRトレースの形状を説明している。図8aは、1.25kHzの周波数での外乱が位置Xに位置する単発の測定されたOTDRトレースを示している(水平軸は時間であり、垂直軸は干渉計段階からの(組み合わせ)信号のレベルである)。曲線(A)は、外乱の規模が小さいときの典型的な単一パルス応答を示す。パルスからパルスへ、レベルは、外乱が変化するにつれてトレースの全長に沿って上下に移動する。しかしながら、外乱振幅の増幅につれ、トレースはその長さ(曲線B)に沿った構造を示し始める。この構造はパルスからパルスへ上下に振動する(図8(a)は、〜D/2(D=25km)の長さのテストファイバからの測定されたOTDRトレースを示す。図8(b)は外乱のトーンの根本的な、及び最初の2つの奇数の(odd)高調波のための、外乱長分散(方程式2c)の理論上の規模を示している。
【0072】
このようにして(空間位置に対応する)時間位置Xでの外乱特長は、図6aから図6cの例に示されているように、変化は減少であるが、この例では激しい変化、ここ干渉信号では上昇であるが、減少であってもよい。
【0073】
長さ依存構造はモデリングによって予測される。図8bは、外乱の規模を拡大することによって生じるであろう奇数の調和振動数の関数として、結果として生じる変動深さ(方程式2c)の規模を示す。(T−τ)/Dは、外乱ポイント「X」とi番目の散乱領域間の距離に相当する。ファイバに沿ってちょうど半分を超えたポイントで5番目の高調波で明らかにヌル(null)がある。OTDRトレースは、理論により予測される特徴的な長さの分散変動を示す。
【0074】
位置情報を抽出するための信号処理:図8aのOTDRトレースは、ポイント外乱でさえ後方散乱シグネチャに沿って分散特長を生じさせることがあることを示している。しかしながら、重要な点は、外乱が発生するポイントでのシグネチャには常に突然の変化があるという点である。図6b及び図6cにこれを示している。これらのリアルタイムアナログ後方散乱信号は、OTDR範囲解像度(この場合には〜1μs)により決定される精度で外乱の始まりを配置できることを示している。したがって、信号処理システムは、2つの近接する範囲分解能セル(A)と(B)からの信号を比較することによってこれらの特長を探すように設計される。それらの間の差異を実行することによって、図8aに示されたさらにゆっくりとした構造が消える(近接セルは、それらの間に位置する外乱がない限り相関しない)。したがって、原則的には、いかなる数の同時外乱もこの技法によって位置を突き止めることができる。
【0075】
ウィンドウ検出器(図2)は、OTDRトレース上でレンジマーカ(又はブライトアップスポット)を生じさせるために特定の規模を超える(A−B)特長を選択するために使用できる。同様に、外乱の二次元「テレビ状ピクチャ」は形成できる。この場合、x方向はファイバに沿った距離に対応し、y方向は範囲分解能セルごとの外乱時間履歴に対応し、z変動はウィンドウ検出器出力によって駆動される。
【0076】
移動する車両の位置の検知
車両の位置を検知するため検知システム300は図9に示されている(前記図に関する類似する構成要素は類似する符号を有する)。ここでは、光ファイバケーブル16(伝送リンク)は、線路に沿って移動する列車304の位置を検知するために線路302に沿って延在する。ファイバケーブル16は一般的に線路302に平行な方向で延在し、好ましくは地中に、又は線路近傍のダクト内に埋設される。
【0077】
一端では、ファイバケーブル16は、ファイバケーブル16の物理的かく乱、特に動的外乱を監視するために、(図1に示されているもののような)監視ステーション12という形で監視装置に結合される。ファイバケーブルは、ファイバケーブル16中で動的外乱を引き起こすために、電車304の移動のための線路302に十分に近くに敷設され、その動的外乱は監視ステーション12で検知できる。列車により引き起こされる外乱は概して列車304に局所的となり、列車の移動外乱が、列車の速度に相当する速度でケーブル16に沿って移動する動的外乱を引き起こす結果となる。このようにしてファイバは、空間的に連続した様式での車両の移動を監視するセンサとしての機能を果たすことができる。
【0078】
ファイバケーブル16は、線路302の側部に沿って敷設され、ファイバケーブル16に到達するために地面を通って伝播する列車により生じた外乱のために、線路に十分近く、地下に又は既存のダクト内に埋設されてよい。ファイバケーブルは線路の下に敷設されてよいが、好ましくは、線路から1mの距離等、線路に隣接して敷設されるであろう。代わりに、線路のレールに沿って延在する穴又は溝が、ファイバケーブル16を受け入れるために設けられてよく、ファイバケーブル16はこのような穴又は溝に沿って延在する。一実施形態では、線路に沿った既存のダクトがケーブルを収容するために便利に使用されてよい。
【0079】
明らかに、ファイバケーブル16の移動する列車に対する感度は、ファイバ(又はダクト)と線路の間の距離、地面と土壌の状態、ケーブル特性等の、局所的な環境に依存する。したがって、システムの感度は全長ファイバ16に沿って一定ではない可能性がある。
【0080】
監視ステーション112は第1のファイバの端部を基準にして対向する端部に結合されるが、追加のファイバケーブル116は、第1のファイバ16に対するのと類似するように線路に沿って経路選択されてよい。したがって、列車が一方の監視ステーションから遠いとき、列車は他方の監視ステーションにより近くなる。一般的には任意の1本のファイバに沿った感度は、そのファイバのための監視ステーションからの距離が拡大するにつれ減少するため、これにより全体としてのシステムの感度は改善される。
【0081】
ファイバ16と線路の間の機械的な結合を高めるために、ファイバは1つ以上のポイントで横断方向で線路の下に敷設されてよい。好ましくはファイバ経路は、図10に示されているように線路の下に敷設された1つ以上のU字形の部分を有し、それによって互いに近い2つのポイントで横断方向で線路を交差する(複数のU字形の部分が線路の下に延在する場合、監視ステーションの空間的な分解能は、近接するU字形部分からの外乱が互いから区別できるように選ばれる)。
【0082】
複数のU字形の部分は、例えばステーション306の近傍で左右の配列で配置されてよく、ファイバはU字形の部分の間の線路に概して平行に延在する。ステーション領域から離れて、ファイバは概して線路に平行に並んで延在する。
【0083】
代わりに、図11に示されるように、線路に平行に延在する第2のファイバ116はステーション間の列車の位置を検知するために使用されてよいが、第1のファイバ16は、ステーション領域での使用のために複数のU字形状の部分として配置されてよい。
【0084】
通常、ファイバケーブルは、ステーション間の線路に概して平行な方向で、通常は1km以上の距離、好ましくは10km、延在し、その結果ファイバは少なくとも1km、あるいは10kmもの概して連続する距離での移動を検知できる。明らかに、センサシステムは概して連続的な距離よりも小さい分解能で位置を決定することができ、分解能は、光パルスの持続時間と列車又は他の車両から検出可能な外乱の伝播の範囲によって決定される。横断方向の部分が、ファイバの概して平行な部分の間に設けられても、好ましくは、少なくとも1km、好ましくは10km延在する、少なくとも1つの概して平行な部分が設けられるであろう。
【0085】
したがって、本実施形態により、1組の信号コピーの位相差を、干渉信号を形成するために結合でき、その結果外乱により引き起こされるファイバ内の時間変化する位相変化が、信号組(一方が他方の後を追う)の間の位相差を生じさせ、その位相差が干渉信号の中の振幅の変化に変換できることが分かる。
【0086】
まとめると、前記実施形態では、一連の低コヒーレンステストパルスが光リンクの中に入れられ、後方散乱帰還信号が監視される、光時間領域反射率測定法が使用される。テストパルスは不均衡マッハツェンダー干渉計を通過し、テストパルスごとに、1組の時間変位されたパルスコピーがリンクの上に開始される結果となる。後方散乱帰還信号は同じ干渉計を通過し、各組のパルスコピーに再調整させ、互いに干渉させる。時間変化外乱は、1組の各パルスコピーに異なる影響を及ぼす可能性がある。その結果、ステップ等の異常が後方散乱信号で発生する可能性がある。異常の時間位置から、関与する外乱の距離が評価される。
【図面の簡単な説明】
【0087】
【図1】本発明による、伝送リンクと光検知システムを示す図である。
【図2】図1のシステムとともに使用するための信号処理回路を示す図である。
【図3】図1のリンクの上にどのようにしてデータを多重化できるのかを示す図である。
【図4】受光器回路を示す図である。
【図5a】光学ソース回路を示す図である。
【図5b】あまり好ましくない別の光学ソース回路を示す図である。
【図6a】サンプル帰還信号の測定されたトレースを示す図である。
【図6b】サンプル帰還信号の測定されたトレースを示す図である。
【図6c】サンプル帰還信号の測定されたトレースを示す図である。
【図7a】理論上の曲線を示す図である。
【図7b】理論上の曲線を示す図である。
【図8a】測定された帰還信号を示す図である。
【図8b】複数の理論上の曲線を示す図である。
【図9】第1の実施形態で列車の位置がどのようにして検知できるかを示す図である。
【図10】第2の実施形態で列車の位置がどのようにして検知できるかを示す図である。
【図11】第3の実施形態で列車の位置がどのようにして検知できるかを示す図である。
【特許請求の範囲】
【請求項1】
伝送リンク上での時間変化外乱の位置を評価する方法であって、
1組の信号コピーがあるようにソースから出力信号を少なくとも部分的にコピーするステップと、
前記信号コピーを前記伝送リンク上に送信するステップと、
前記伝送リンクから少なくとも部分的に以前にその上で送信された帰還信号コピーを受信するステップと、
組み合わせ信号を生じさせるために送信された組の前記受信された信号コピーを結合するステップと、
前記伝送リンク上の前記外乱の位置を評価するために前記組み合わせ信号の時間特性を使用するステップと、を含む方法。
【請求項2】
前記時間特性は、外乱特長が前記組み合わせ信号で発生する時間を含む、請求項1に記載の方法。
【請求項3】
信号コピーが、前記信号コピーが前記伝送リンクに沿って移動するにつれ分散後方散乱のプロセスにより返される、請求項1又は請求項2に記載の方法。
【請求項4】
前記ソースは、光パルスの形式を有する出力信号を生じさせるように構成され、各光パルスが、パルスが前記伝送リンクに沿って移動するにつれ経時的に分散される組み合わせ信号を引き起こす、請求項3に記載の方法。
【請求項5】
前記組み合わせ信号は、間隙を介した時間位置の第1の集合と、時間位置の第2の集合でサンプリングされ、第1のサンプリングされた集合と第2のサンプリングされた集合は比較ステップで比較される、請求項1乃至請求項4のいずれか1項に記載の方法。
【請求項6】
前記第1の集合と第2の集合の時間位置はインタリーブされる、請求項5に記載の方法。
【請求項7】
前記比較ステップは、前記第1の集合と第2の集合の間の差異に少なくとも部分的に依存するデータの集合を生成することを含む、請求項5又は請求項6に記載の方法。
【請求項8】
前記信号コピーは、前記光伝送リンクの共通伝送媒体に沿って伝送される、請求項1乃至請求項7のいずれか1項に記載の方法。
【請求項9】
1組の信号コピーが、互いを基準にした遅延差のある前記伝送リンクに沿って移動する、請求項1乃至請求項8のいずれか1項に記載の方法。
【請求項10】
前記遅延差は光学ソースに結合された不均衡干渉計で引き起こされ、前記干渉計は第1の経路と第2の経路を有し、前記第1の経路の遷移時間は前記第2の経路の遷移時間より長く、1組の信号コピーは互いにとって異なるそれぞれの経路に沿って移動させられる、請求項9に記載の方法。
【請求項11】
前記干渉計は、前記ソースに結合される第1の結合段階を有し、前記第1の信号コピーと第2の信号コピーを形成するために、前記結合段階は入信放射線強度の一部を前記ソースから一方の経路に沿って、前記入信放射線強度の別の部分を他方の経路に沿って向けるように構成される、請求項10に記載の方法。
【請求項12】
前記干渉計は前記第1の経路と第2の経路からの放射線を結合するため、及び前記共通通信リンクに前記結合された放射線を結合するための第2の結合段階を有する、請求項11に記載の方法。
【請求項13】
前記第2のロケーションから返される前記信号は、それぞれ第2の結合段階によって前記第1の経路と第2の経路に沿って向けられ、前記このように向けられた信号は以後前記第1の結合段階で結合される、請求項12に記載の方法。
【請求項14】
1組の前記信号コピーが、第1のロケーションにおいて互いに遅延され、前記第1のロケーションから離れた第2のロケーションにおいて外乱が検出可能である、請求項1乃至請求項13のいずれか1項に記載の方法。
【請求項15】
1組の前記信号コピーのそれぞれが検出された外乱により外乱される、請求項1乃至請求項14のいずれか1項に記載の方法。
【請求項16】
1組の前記信号コピーは前記伝送リンクに沿って同じ向きで移動する、請求項1乃至請求項15のいずれか1項に記載の方法。
【請求項17】
前記出力信号は、1ピコ秒未満の該信号と関連付けられる平均位相コヒーレンス時間を有する、請求項1乃至請求項16のいずれか1項に記載の方法。
【請求項18】
1組の前記信号コピーは、該コピーと関連付けられる遅延差時間を有し、前記遅延時間が少なくとも1000という因数分、平均位相コヒーレンス時間より大きい、請求項17に記載の方法。
【請求項19】
前記伝送リンクは誘導トラックに沿って延在する光チャネルを含み、前記誘導トラックは車両の移動を誘導するように構成され、前記チャネルは、前記車両の移動が前記光チャネルに沿って外乱を引き起こすように構成される、請求項1乃至請求項18のいずれか1項に記載の方法。
【請求項20】
前記光チャネルの前記経路は周期的に前記トラックを交差する、請求項19に記載の方法。
【請求項21】
前記誘導トラックは、列車の移動を誘導するための1つ以上のレールの形を有する、請求項19又は請求項20に記載の方法。
【請求項22】
伝送リンク上の時間変化外乱の位置を評価するための装置であって、前記装置は、1組の信号コピーがあるようにソースからの出力信号を少なくとも部分的にコピーするための手段と、前記伝送リンクの上に前記信号コピーを送信するための手段と、前記伝送リンク上で以前に送信された帰還信号コピーを少なくとも部分的に前記伝送リンクから受信するための手段と、組み合わせ信号を生じさせるために送信済みの組の前記受信信号コピーを結合するための手段と、時間の関数として前記組み合わせ信号を監視するための監視手段とを含む、装置。
【請求項23】
前記監視手段は、時間の関数として前記組み合わせ信号を表示するためのディスプレイ装置を含む、請求項22に記載の装置。
【請求項24】
遅延手段が互いを基準にして1組の前記信号コピーを遅延するために設けられる、請求項22又は請求項23に記載の装置。
【請求項25】
前記遅延手段は干渉計段階によって提供され、前記干渉計段階は、第1の伝送レッグ及び第2の伝送レッグと、前記第1のレッグと第2のレッグに、又は前記第1のレッグと第2のレッグから結合するための結合手段とを有し、出力信号をコピーするための前記手段と、前記受信された信号コピーを結合するための前記手段が、前記結合手段により共通に形成される、請求項24に記載の装置。
【請求項26】
伝送リンクを監視するための監視ステーションであって、前記監視ステーションは、出力信号を生成するためのソースと、出力信号ごとに1組の信号コピーがあるように前記ソースから前記出力信号を少なくとも部分的にコピーするための干渉計段階と、前記伝送リンク上に前記信号コピーを開始するための出力と、プロセッサ回路を有し、前記干渉計段階は、分散後方散乱のプロセスにより返される信号コピーを前記リンクから受信し、干渉信号を生じさせるために前記信号コピーを結合するように構成され、前記プロセッサ回路は前記帰還信号の時間特性の表示に関連して前記干渉信号を記憶するように構成される監視ステーション。
【請求項27】
前記干渉信号は、時間とともに変化する時間分散信号であり、時間特性は前記帰還信号の前記時間変動である、請求項26に記載の監視ステーション。
【請求項28】
前記干渉信号は時間分散信号であり、前記プロセッサ回路は周期的に前記干渉信号をサンプリングし、サンプルごとにそれぞれの再帰時間と関連して前記サンプルを記憶するように構成される、請求項26又は請求項27に記載の監視ステーション。
【請求項29】
前記ソースは光パルスソースである、請求項26乃至請求項28のいずれか1項に記載の監視ステーション。
【請求項30】
移動する車両の位置を検知するための検知システムであって、前記検知システムは、前記車両の移動を誘導するための誘導トラックと、前記誘導トラックに沿って延在する光チャネルと、前記光チャネルに結合された監視装置とを有し、前記光チャネルは、前記車両の移動により前記光チャネルに沿った移動外乱が引き起こされるように前記誘導トラックに機械的に結合され、前記監視装置は、(i)前記移動外乱を示す前記光チャネルから光信号を検出し、(ii)前記光信号の少なくとも1つの時間特性を評価し、(iii)前記トラックに沿った前記車両の位置が検知できるように、前記評価された時間特性に依存して、前記チャネルに沿った前記移動する外乱の前記位置の表示を決定するように構成される、検知システム。
【請求項31】
誘導トラックに沿って移動する車両の位置を検知する方法であって、前記誘導トラックに沿って延在する光チャネルが設けられ、監視装置が前記光チャネルに結合され、前記光チャネルは、前記車両の移動により前記光チャネルに沿って移動外乱が引き起こされるように誘導トラックに機械的に結合され、
(i)前記移動外乱を示す光チャネルからの光信号を検出するステップと、
(ii)前記光信号の少なくとも1つの時間特性を評価するステップと、
(iii)前記評価された時間特性に依存して、前記チャネルに沿った前記移動外乱の前記位置の表示を決定するステップと、
(iv)前記光チャネルに沿った前記外乱の前記位置から前記車両の位置を推論するステップとを含む、方法。
【請求項32】
伝送リンクを監視し、前記リンクの物理的かく乱を検出する方法であって、
1組の信号コピーがあるようにソースから出力信号を少なくとも部分的にコピーするステップと、
共通通信リンク上に前記信号コピーを送信するステップと、
伝送リンク上を以前に送信された少なくとも部分的に反射されたコピーを前記伝送リンクから受信するステップと、
組み合わせ信号を生成するために1組の前記受信された信号コピーを結合するステップと、
外乱特長から外乱の存在が推論できる、前記組み合わせ信号における外乱特長を検出するために前記組み合わせ信号を監視するステップと、
前記組み合わせ信号の時間特性から、前記通信リンク上での前記外乱の位置を推測するステップとを含む、方法。
【請求項1】
伝送リンク上での時間変化外乱の位置を評価する方法であって、
1組の信号コピーがあるようにソースから出力信号を少なくとも部分的にコピーするステップと、
前記信号コピーを前記伝送リンク上に送信するステップと、
前記伝送リンクから少なくとも部分的に以前にその上で送信された帰還信号コピーを受信するステップと、
組み合わせ信号を生じさせるために送信された組の前記受信された信号コピーを結合するステップと、
前記伝送リンク上の前記外乱の位置を評価するために前記組み合わせ信号の時間特性を使用するステップと、を含む方法。
【請求項2】
前記時間特性は、外乱特長が前記組み合わせ信号で発生する時間を含む、請求項1に記載の方法。
【請求項3】
信号コピーが、前記信号コピーが前記伝送リンクに沿って移動するにつれ分散後方散乱のプロセスにより返される、請求項1又は請求項2に記載の方法。
【請求項4】
前記ソースは、光パルスの形式を有する出力信号を生じさせるように構成され、各光パルスが、パルスが前記伝送リンクに沿って移動するにつれ経時的に分散される組み合わせ信号を引き起こす、請求項3に記載の方法。
【請求項5】
前記組み合わせ信号は、間隙を介した時間位置の第1の集合と、時間位置の第2の集合でサンプリングされ、第1のサンプリングされた集合と第2のサンプリングされた集合は比較ステップで比較される、請求項1乃至請求項4のいずれか1項に記載の方法。
【請求項6】
前記第1の集合と第2の集合の時間位置はインタリーブされる、請求項5に記載の方法。
【請求項7】
前記比較ステップは、前記第1の集合と第2の集合の間の差異に少なくとも部分的に依存するデータの集合を生成することを含む、請求項5又は請求項6に記載の方法。
【請求項8】
前記信号コピーは、前記光伝送リンクの共通伝送媒体に沿って伝送される、請求項1乃至請求項7のいずれか1項に記載の方法。
【請求項9】
1組の信号コピーが、互いを基準にした遅延差のある前記伝送リンクに沿って移動する、請求項1乃至請求項8のいずれか1項に記載の方法。
【請求項10】
前記遅延差は光学ソースに結合された不均衡干渉計で引き起こされ、前記干渉計は第1の経路と第2の経路を有し、前記第1の経路の遷移時間は前記第2の経路の遷移時間より長く、1組の信号コピーは互いにとって異なるそれぞれの経路に沿って移動させられる、請求項9に記載の方法。
【請求項11】
前記干渉計は、前記ソースに結合される第1の結合段階を有し、前記第1の信号コピーと第2の信号コピーを形成するために、前記結合段階は入信放射線強度の一部を前記ソースから一方の経路に沿って、前記入信放射線強度の別の部分を他方の経路に沿って向けるように構成される、請求項10に記載の方法。
【請求項12】
前記干渉計は前記第1の経路と第2の経路からの放射線を結合するため、及び前記共通通信リンクに前記結合された放射線を結合するための第2の結合段階を有する、請求項11に記載の方法。
【請求項13】
前記第2のロケーションから返される前記信号は、それぞれ第2の結合段階によって前記第1の経路と第2の経路に沿って向けられ、前記このように向けられた信号は以後前記第1の結合段階で結合される、請求項12に記載の方法。
【請求項14】
1組の前記信号コピーが、第1のロケーションにおいて互いに遅延され、前記第1のロケーションから離れた第2のロケーションにおいて外乱が検出可能である、請求項1乃至請求項13のいずれか1項に記載の方法。
【請求項15】
1組の前記信号コピーのそれぞれが検出された外乱により外乱される、請求項1乃至請求項14のいずれか1項に記載の方法。
【請求項16】
1組の前記信号コピーは前記伝送リンクに沿って同じ向きで移動する、請求項1乃至請求項15のいずれか1項に記載の方法。
【請求項17】
前記出力信号は、1ピコ秒未満の該信号と関連付けられる平均位相コヒーレンス時間を有する、請求項1乃至請求項16のいずれか1項に記載の方法。
【請求項18】
1組の前記信号コピーは、該コピーと関連付けられる遅延差時間を有し、前記遅延時間が少なくとも1000という因数分、平均位相コヒーレンス時間より大きい、請求項17に記載の方法。
【請求項19】
前記伝送リンクは誘導トラックに沿って延在する光チャネルを含み、前記誘導トラックは車両の移動を誘導するように構成され、前記チャネルは、前記車両の移動が前記光チャネルに沿って外乱を引き起こすように構成される、請求項1乃至請求項18のいずれか1項に記載の方法。
【請求項20】
前記光チャネルの前記経路は周期的に前記トラックを交差する、請求項19に記載の方法。
【請求項21】
前記誘導トラックは、列車の移動を誘導するための1つ以上のレールの形を有する、請求項19又は請求項20に記載の方法。
【請求項22】
伝送リンク上の時間変化外乱の位置を評価するための装置であって、前記装置は、1組の信号コピーがあるようにソースからの出力信号を少なくとも部分的にコピーするための手段と、前記伝送リンクの上に前記信号コピーを送信するための手段と、前記伝送リンク上で以前に送信された帰還信号コピーを少なくとも部分的に前記伝送リンクから受信するための手段と、組み合わせ信号を生じさせるために送信済みの組の前記受信信号コピーを結合するための手段と、時間の関数として前記組み合わせ信号を監視するための監視手段とを含む、装置。
【請求項23】
前記監視手段は、時間の関数として前記組み合わせ信号を表示するためのディスプレイ装置を含む、請求項22に記載の装置。
【請求項24】
遅延手段が互いを基準にして1組の前記信号コピーを遅延するために設けられる、請求項22又は請求項23に記載の装置。
【請求項25】
前記遅延手段は干渉計段階によって提供され、前記干渉計段階は、第1の伝送レッグ及び第2の伝送レッグと、前記第1のレッグと第2のレッグに、又は前記第1のレッグと第2のレッグから結合するための結合手段とを有し、出力信号をコピーするための前記手段と、前記受信された信号コピーを結合するための前記手段が、前記結合手段により共通に形成される、請求項24に記載の装置。
【請求項26】
伝送リンクを監視するための監視ステーションであって、前記監視ステーションは、出力信号を生成するためのソースと、出力信号ごとに1組の信号コピーがあるように前記ソースから前記出力信号を少なくとも部分的にコピーするための干渉計段階と、前記伝送リンク上に前記信号コピーを開始するための出力と、プロセッサ回路を有し、前記干渉計段階は、分散後方散乱のプロセスにより返される信号コピーを前記リンクから受信し、干渉信号を生じさせるために前記信号コピーを結合するように構成され、前記プロセッサ回路は前記帰還信号の時間特性の表示に関連して前記干渉信号を記憶するように構成される監視ステーション。
【請求項27】
前記干渉信号は、時間とともに変化する時間分散信号であり、時間特性は前記帰還信号の前記時間変動である、請求項26に記載の監視ステーション。
【請求項28】
前記干渉信号は時間分散信号であり、前記プロセッサ回路は周期的に前記干渉信号をサンプリングし、サンプルごとにそれぞれの再帰時間と関連して前記サンプルを記憶するように構成される、請求項26又は請求項27に記載の監視ステーション。
【請求項29】
前記ソースは光パルスソースである、請求項26乃至請求項28のいずれか1項に記載の監視ステーション。
【請求項30】
移動する車両の位置を検知するための検知システムであって、前記検知システムは、前記車両の移動を誘導するための誘導トラックと、前記誘導トラックに沿って延在する光チャネルと、前記光チャネルに結合された監視装置とを有し、前記光チャネルは、前記車両の移動により前記光チャネルに沿った移動外乱が引き起こされるように前記誘導トラックに機械的に結合され、前記監視装置は、(i)前記移動外乱を示す前記光チャネルから光信号を検出し、(ii)前記光信号の少なくとも1つの時間特性を評価し、(iii)前記トラックに沿った前記車両の位置が検知できるように、前記評価された時間特性に依存して、前記チャネルに沿った前記移動する外乱の前記位置の表示を決定するように構成される、検知システム。
【請求項31】
誘導トラックに沿って移動する車両の位置を検知する方法であって、前記誘導トラックに沿って延在する光チャネルが設けられ、監視装置が前記光チャネルに結合され、前記光チャネルは、前記車両の移動により前記光チャネルに沿って移動外乱が引き起こされるように誘導トラックに機械的に結合され、
(i)前記移動外乱を示す光チャネルからの光信号を検出するステップと、
(ii)前記光信号の少なくとも1つの時間特性を評価するステップと、
(iii)前記評価された時間特性に依存して、前記チャネルに沿った前記移動外乱の前記位置の表示を決定するステップと、
(iv)前記光チャネルに沿った前記外乱の前記位置から前記車両の位置を推論するステップとを含む、方法。
【請求項32】
伝送リンクを監視し、前記リンクの物理的かく乱を検出する方法であって、
1組の信号コピーがあるようにソースから出力信号を少なくとも部分的にコピーするステップと、
共通通信リンク上に前記信号コピーを送信するステップと、
伝送リンク上を以前に送信された少なくとも部分的に反射されたコピーを前記伝送リンクから受信するステップと、
組み合わせ信号を生成するために1組の前記受信された信号コピーを結合するステップと、
外乱特長から外乱の存在が推論できる、前記組み合わせ信号における外乱特長を検出するために前記組み合わせ信号を監視するステップと、
前記組み合わせ信号の時間特性から、前記通信リンク上での前記外乱の位置を推測するステップとを含む、方法。
【図1】

【図2】
【図3】
【図4】
【図5a】
【図5b】
【図6a】
【図6b】

【図6c】
【図7a】
【図7b】
【図8a】
【図8b】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5a】
【図5b】
【図6a】
【図6b】
【図6c】
【図7a】
【図7b】
【図8a】
【図8b】
【図9】
【図10】
【図11】
【公表番号】特表2007−530970(P2007−530970A)
【公表日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願番号】特願2007−505635(P2007−505635)
【出願日】平成17年3月31日(2005.3.31)
【国際出願番号】PCT/GB2005/001269
【国際公開番号】WO2005/095917
【国際公開日】平成17年10月13日(2005.10.13)
【出願人】(390028587)ブリティッシュ・テレコミュニケーションズ・パブリック・リミテッド・カンパニー (104)
【氏名又は名称原語表記】BRITISH TELECOMMUNICATIONS PUBLIC LIMITED COMPANY
【Fターム(参考)】
【公表日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願日】平成17年3月31日(2005.3.31)
【国際出願番号】PCT/GB2005/001269
【国際公開番号】WO2005/095917
【国際公開日】平成17年10月13日(2005.10.13)
【出願人】(390028587)ブリティッシュ・テレコミュニケーションズ・パブリック・リミテッド・カンパニー (104)
【氏名又は名称原語表記】BRITISH TELECOMMUNICATIONS PUBLIC LIMITED COMPANY
【Fターム(参考)】
[ Back to top ]