
外科切除用保護装置および誘発電位モニタリングシステム
外科切除システムと共に使用する保護装置。この保護装置は、筐体と巻線とを含む。筐体は、長手方向の通路を画定し、器具ハンドピースに着脱自在に取り付けられるように構成される。ワイヤは筐体に結合され、導電性ワイヤと絶縁材料とを含む。ワイヤは対向する第1端と第2端を画定し、第1端は通路内に設置される。絶縁材料は、ワイヤの第1端が通路内に露出されるように、第1端を除いたワイヤを覆う。ワイヤの第1端は、通路内での配置時に切除工具軸との電気接続を確立する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、外科切除ならびに外科切除器具およびシステムに関する。より詳細には、諸態様は、高速切除機能および電気探索機能の両方または誘発電位モニタリング機能が可能である外科切除器具およびシステム、ならびにそのようなシステムで有用な構成要素に関する。
【背景技術】
【0002】
末端に切除先端(たとえば、バー)を有する細長い切除工具を用いる外科微小切除器具は、種々の外科切除手技、たとえば、狭い入口または通路を介して手術部位へのアクセスが得られる手技における使用に広く受け入れられている。この切除工具は所望の切除手技を行うためにモータによって回転自在に駆動され、ハンドピースはこの切除工具とモータとの連結を達成および維持する。この切除工具は、ハンドピース単独で支持されてもよいし、追加の支持を得るために外管内に配設されてもよい。
【発明の概要】
【発明が解決しようとする課題】
【0003】
微小切除手技(たとえば、ENT)は典型的には、通常なら神経または他のデリケートな身体構造の近傍にある身体領域からの組織や骨などの除去を伴う。このため、不注意な切除または過熱により神経(または他の組織)を潜在的に切断あるいはその他の方法で損傷を与えるという危険が存在する。したがって、従来の微小切除手技は多くの場合、手技を安全に完了するために神経の位置を判断する追加のステップと器具とを必要とする。たとえば、誘発電位モニタリング装置は、与えられた刺激エネルギに対する患者の反応を介して神経に対する切除先端の位置を定期的に評価するために用いることができる。そのような手技を実行する間、外科医は微小切除器具を使って組織/骨を連続的に除去するように求められ、次にその他の方法で誘発電位モニタリング装置を備えた別個の用具を使用して、神経(または他の身体構造)を切除する区域を探索するように求められることがある。これは明らかに時間がかかり、したがって望ましくない。最近では、たとえば本願の権利者が所有する米国特許公開第2007/0100378号に記載されているような、切除器具が切除と(誘発電位モニタリングに関連して)電気刺激との両方を提供するシステムが提案されている。そのような構造におけるどんな改善も広く受け入れられる。
【課題を解決するための手段】
【0004】
本開示の原理によるいくつかの態様は、外科切除システムと共に使用する保護装置に関する。この保護装置は、筐体と巻線とを含む。筐体は、前端と、後端と、それらの間に延びる長手方向の通路とを画定する。この点に関して、通路は、その他の方法で外科切除器具ハンドピースを着脱自在に受けるようなサイズの後端開口において開いており、切除工具軸を着脱自在に受けるようなサイズの前端開口においても開いている。巻線は筐体に結合され、導電性ワイヤと非導電性絶縁材料とを含む。ワイヤは、対向する第1端および第2端を画定し、第1端は通路内に設置される。絶縁材料は、ワイヤの第1端が通路内に露出されるように、第1端を除いたワイヤの少なくとも大部分を覆う。この構造によれば、通路内への配置時に、ワイヤの第1端は、切除工具軸と電気接続とを確立する。ワイヤの第2端は、別個のエネルギ源に直接的にまたは間接的に電気的に結合される。したがって、ワイヤは、切除工具軸との接触により手術部位への刺激エネルギの伝達を容易にする。いくつかの実施形態では、ワイヤの第1端は、ワイヤのブラシ型構造を形成する複数のワイヤ素線を含む。
【0005】
本開示の原理による他の態様は、切除工具とモータ組立体とハンドピースと保護装置とを含む外科切除システムに関する。切除工具は、切除先端と工具軸とを含む。モータ組立体は、駆動機構を回転自在に駆動するモータを含む。ハンドピースは、モータ組立体を維持しており、ハンドピースによって画定される孔内での工具軸と駆動機構との選択的な接続を容易にするように構成される。最終的に、保護装置は、筐体と、それに結合された巻線とを含む。筐体は、前端と、後端と、それらの間に延びる長手方向の通路とを画定する。後端は、通路の後端開口を介してハンドピースに着脱自在に取り付けられるように構成される。さらに、前端は、前端開口を介して通路内での工具軸の選択的な配置を可能にするように構成される。巻線は、導電性ワイヤと非導電性絶縁材料とを含む。ワイヤは、対向する第1端と第2端を画定する。第1端は、通路内に設置される。絶縁材料は、第1端が通路内に露出されるように、第1端を除いたワイヤの少なくとも大部分を取り巻く。この構造によれば、最終組み立て時に、ハンドピースは通路内に配設される。工具軸は、通路を貫通して孔内に延び、駆動機構に接続される。最終的に、ワイヤの第1端は工具軸と接触する。したがって、電気経路が、ワイヤの第2端から切除先端まで確立される。所望される場合、保護装置は、ハンドピースとの取り付けから除外されることができる。いくつかの実施形態では、システムは、ワイヤの第2端に選択的に電気的に結合されるエネルギ源を有する誘発電位モニタリングシステムをさらに含む。これらの代替構造によれば、エネルギ源は、ワイヤおよびワイヤの第1端と工具軸との間の接触を介して刺激エネルギを切除先端に加える。さらに他の実施形態では、ハンドピースは外部筐体を含み、切除工具を外部筐体から電気的に絶縁するように構成される。
【0006】
本開示の原理によるさらに他の態様は、外科切除手技を実施する方法に関する。この方法は、基端側と末端側と中心孔とを画定するハンドピースを提供することを含む。保護装置も提供され、筐体と巻線とを含む。筐体は、後端開口と前端開口との間に延び、それらにおいて開いている長手方向の通路を画定する。ワイヤは筐体に結合され、通路内に設置される第1端を含む。さらに、非導電性絶縁材料は、ワイヤの第1端が通路内に露出されるように、第1端を除いたワイヤの少なくとも大部分を覆う。保護装置筐体は、通路が孔に開くように、ハンドピースの末端側に組み付けられる。切除工具の工具軸は、切除工具の切除先端が保護装置より末端側に設置されるように、通路の前端内を通って孔内へ延びる。さらに、挿入時に、ワイヤの第1端は工具軸と接触する。工具軸はまた、ハンドピースによってその他の方法で維持されるモータ組立体の駆動機構にも装着される。誘発電位モニタリングシステムは、誘発電位モニタリングシステムのエネルギ源が切除先端と電気的に連通するように、ワイヤの第2端に電気的に接続される。次に、切除先端が手術部位に送達される。モータ組立体は、手術部位において切除先端を用いて切除動作を実施するように操作される。刺激エネルギは、エネルギ源を介して切除先端に加えられ、神経に対する切除先端の近接は、EMG反応などの刺激エネルギに対する参照に基づいて検出される。
【図面の簡単な説明】
【0007】
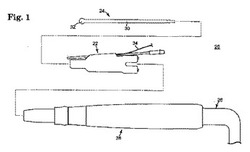
【図1】本開示の諸態様による保護装置を含む外科切除器具の分解組立図である。
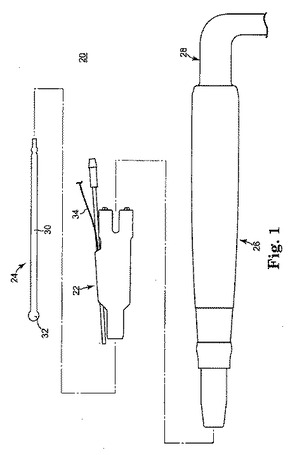
【図2A】図1の保護装置の分解断面図である。
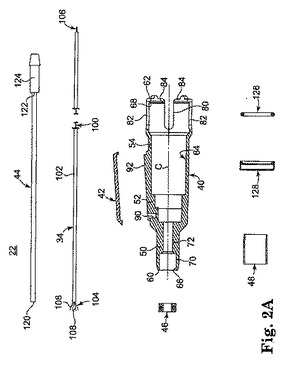
【図2B】最終組み立て時の図2Aの保護装置を示す図である。
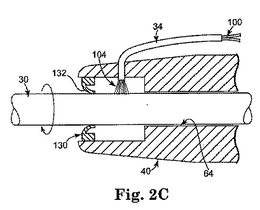
【図2C】本開示の諸態様による別の保護装置の一部分の簡略化された断面図である。
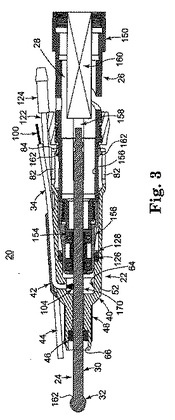
【図3】最終組み立て時の図1の器具の断面図である。
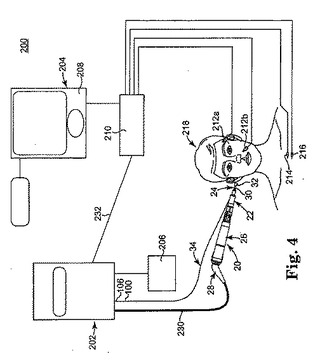
【図4】図1の器具を含む外科切除システムのブロック図である。
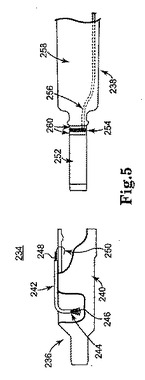
【図5】本開示の諸態様による別の外科切除器具の簡略化された側面図である。
【図6】本開示の諸態様による別の外科切除器具の簡略化された側面図である。
【図7】本開示の諸態様による別の外科切除システムの簡略化された斜視図である。
【図8】図1の器具で有用な切除工具を、断面図形式で示された一部分と共に示す側面図である。
【図9】図1の器具で有用な切除工具を、断面図形式で示された一部分と共に示す側面図である。
【図10】図1の器具で有用な切除工具を、断面図形式で示された一部分と共に示す側面図である。
【図11】本開示の諸態様による別の外科器具の断面斜視図である。
【発明を実施するための形態】
【0008】
本開示の原理による保護装置22を含む外科切除器具20が図1に示される。器具20は、切除工具24およびモータ組立体28を維持するハンドピース26と共に保護装置22を含む(全体的に示される)。種々の構成要素の詳細が以下に示される。しかし、全体的な説明では、切除工具24は、工具軸30と切除先端32とを含む。保護装置22は、ハンドピース26に着脱自在に取り付けられ、ハンドピース26内で内部的にモータ組立体28への工具軸30の着脱自在な接続を可能にする。さらに、保護装置22は、巻線34を提供する。保護装置22がハンドピース26に組み付けられるとき、ならびに切除工具24がハンドピース26/モータ組立体28に組み付けられるとき、巻線34は工具軸30との電気接続を確立する。次に、使用中に、巻線34は、工具軸30と巻線34との間の内部的な電気接続を介して、電源(図示せず)から切除先端32に電気エネルギを伝達する。したがって、外科器具20は、切除先端32における切除刺激および電気刺激(たとえば、誘発電位モニタリング)が所望される種々の手技で非常に有用である。
【0009】
保護装置22は、図2Aおよび図2Bにさらに詳細に示されている。保護装置22は、巻線34に加えて、筐体40と、任意選択の蓋板42と、任意選択の洗浄管44と、任意選択の軸受部材46と、任意選択のカラー48とを含む。全体的な説明では、巻線34は、たとえば蓋板42を介して、筐体40に付着される。この点に関して、以下にさらに詳細に説明されるように、巻線34の端は、筐体40内部内に露出される。洗浄管44は、筐体40にも付着され、筐体40末端側への液体の送出通路を形成する。しかし、他の構成では、洗浄管44は除去してもよい。提供される場合、軸受部材46は、使用中に工具軸30(図1)を回転自在に支持し、カラー48は、軸受部材46/工具軸30接続部を補強する。
【0010】
筐体40は多種多様な形態を取ることが可能である。図2Aに示されるように、筐体40は、前区分50、中間区分52、および後区分54を全体的に画定するので、区分50〜54は、筐体40が均一な構造となるように一体的に形成されることが理解される。いずれの場合でも、前区分50は前端60において終わり、後区分54は後端62において終わり、筐体40は、端60と62との間に延びる長手方向の通路64を形成する。通路64は、前端開口66により前端60において開いている。さらに、通路64は、後端開口68により後端62において開いている。これらの指示を考慮すると、通路64は、前端開口66において、切除工具24(図1)の摺動挿入および取り外しを可能にするようなサイズを有する。たとえば、いくつかの構成では、通路64は、前区分50に沿って第1の部分70および第2の部分72を有するように画定される。第1の部分70は、(提供される場合)軸受部材46を受ける(たとえば、摩擦受入れして維持する)ようなサイズを有し、第2の部分72は、工具軸30(図1)の直径によりぴったり合致するようなサイズを有する。したがって、通路64の最小有効直径は、第2の部分72(中心軸C)に沿って画定される。通路64の最小有効直径はさらに、筐体40の他の領域および/またはそれに組み付けられる他の構成要素(切除工具24を除いて)によって、縮小または画定されてもよい。たとえば、軸受部材46は、第2の部分72の内径より小さい内径を有し、したがって軸受部材46が通路64の最小有効直径を画定するようにしてもよい。その場合、より全体的な説明では、通路64の最小有効直径は、筐体40への挿入時に切除工具24を直接支持するように設けられる面によって画定される。
【0011】
後区分54は、後端開口68を介してハンドピース26(図1)に着脱自在に取り付けるまたは結合するためのサイズである。たとえば、後区分54は、2つ以上の指部82を一括して画定する1つまたは複数の長手方向の溝80を形成することができる。指部82は、中心軸Cに対して(たとえば、径方向外側に)偏向可能である。いくつかの構成における筐体40の比較的堅固な構造は、指部82に偏り属性を付与し、したがって指部82が強制的に外側に偏向させられるときに、固有の偏りによって指部82が自ら移転して図2Aの方向に戻るようにする。いずれの場合でも、指部82はそれぞれ放射状の掛け金84において終わる。以下に説明されるように、指部82の偏向可能性によって、ハンドピース26上での筐体40の組み立てが可能になり、掛け金84は、ハンドピース26の対応する機構に選択的に係合する。しかし、別法として、ハンドピース26への筐体40の着脱自在な取り付けを実行できる多種多様な他の構造も許容できる。筐体40がハンドピース26(図1)に着脱自在に取り付けられる形態を問わず、通路64は、少なくとも後区分54に沿ってハンドピース26の対応する寸法に相応するサイズ(たとえば、直径)を有する。中間区分52に対して、通路64は、前区分50(たとえば、通路64の第2の部分72)に沿った直径より大きい直径を有することができる。いずれの場合でも、筐体40は、中間区分52において筐体40の厚さを貫通する窓孔90をさらに含み、したがって窓孔90が、通路64ならびに筐体40の外面92に対して開く。以下にさらに詳細に説明されるように、窓孔90は、巻線34の一部分を受けるまたはその通過を可能にするようなサイズを有し、通路64に対して巻線34の所望の部分を維持する。
【0012】
筐体40は、図1および図2Aの各図に反映される形態とは異なる形態を取ることが可能である。しかし、いくつかの構造によれば、前区分50は、以下に説明するように、工具軸30(図1)の支持を容易にするために、その残りの部分に比べて小さいサイズ(たとえば、直径)を有する。いずれの場合でも、筐体40は、非導電性材料、たとえば非導電性のプラスチック材料またはセラミック材料から形成される。
【0013】
巻線34は、ワイヤ100と、非導電性絶縁材料102とを含む。ワイヤ100は、第1端104と第2端106を画定する、すなわちこれらの間に延びる。図2Aおよび図2Bに全体として反映されるように、絶縁材料102は、ワイヤ100の少なくとも大部分を取り巻く(すなわち電気的に絶縁する)ように、ワイヤ100に適用される。しかし、ワイヤ100の少なくとも第1端104は、絶縁材料102によって覆われず、したがって露出される。第2端106も、絶縁材料102に対して露出されてもよいし、または適切なエネルギ源(図示せず)に電気的に結合するように構成された適切な電気コネクタ(たとえば、ソケットコネクタ)を備えたりこれに取り付けられたりしてもよい。
【0014】
ワイヤ100は、1つまたは複数の従来の電気巻線材料から形成することができ、単一長のワイヤであってもよいし、一緒に束ねられた複数の個々のワイヤであってもよい。いくつかの構造によれば、ワイヤ100は炭素繊維ワイヤである。正確な材料を問わず、ワイヤ100は、少なくとも露出された第1端104において、ワイヤ100が、互いに対して個別に広げられた複数のワイヤ素線108を提供するように形成することができる。この構造によれば、第1端104はブラシ様構成を取る。たとえば、当初は、巻線34は従来の電気巻線(すなわち、その全長に沿って絶縁材料102によって取り巻かれるワイヤ100)として提供されることができ、絶縁材料102は第1端104から剥離されることができ、現在露出されている素線108は個別に広げられることができる。あるいは、ワイヤ100の第1端104が電気的に露出される限り、巻線34のさまざまな他の構造も許容できる。
【0015】
特に図2Bを参照すると、保護装置22の最終組み立て時に、巻線34は、ワイヤ100の第1端104が通路64内に設置され、第2端106が筐体40から離れるように、筐体40に取り付けられる。すなわち、最終組み立て時に、第2端106(および第2端106に隣接する巻線34のある区分)は、筐体40に対して移動可能であり、したがって所望のエネルギ源に容易に接続されることができる。1つの参考として、巻線34は短縮された形で図2Bに反映されているので、巻線34の長さは筐体40をはるかに超えて延びてもよいことが理解される。蓋板42を設けてもよく、筐体40の外面92に巻線34を固定するのを支援する。たとえば、巻線34は、第1端104が窓孔90を越えて通路64内にあるように筐体40に組み付けることができる。窓孔90から外側に延びる巻線34の区分は筐体外面92に設置され、蓋板42は巻線34上に適用される。提供される場合、蓋板42は非導電性材料(たとえば、プラスチック)から形成され、巻線34の固定時に筐体40(たとえば、超音波溶接)に付着される。あるいは、さまざまな他の製造技術を用いて巻線34を筐体40に組み付けることができ、筐体40は別個の蓋板42を含んでも含まなくてもよい(たとえば、巻線34は筐体40にインサート成形されることができる)。
【0016】
組み立て技術を問わず、巻線34は、ワイヤ100の第1端104が通路64内に設置されるように設置される。より具体的には、第1端104は、筐体40への挿入時に切除工具軸30(図1)に接触するように置かれる。たとえば、ワイヤ100が、広げられた素線108を含むように提供される場合、少なくともいくつかの素線108は放射状に通路64内に延び、中心軸C近傍の点Pにおいて終わる。より具体的には、第1端104の終点Pは、中心軸Cから径方向に、通路64の最小有効直径または半径(すなわち、第2の部分72に沿って軸受部材46によって画定される直径または半径)より短い間隔を空けられている。したがって、図2Bの方向に対して、ワイヤ端104の終点Pは、前区分50に沿って画定される上壁面110の「下に」延びる。この構成によれば、切除工具軸30は軸受部材46の直径(図2Bの1つの構成では)に相応する直径を有するので、ワイヤ端104との密接な物理的接触が保証される。軸受部材46が中心軸Cに対する工具軸30の位置を事実上決定するので、ワイヤ端104との接触が常に発生し維持される。
【0017】
保護装置22のいくつかの構成によれば、洗浄管44が設けられる。洗浄管44はさまざまな形態を取ることが可能であり、いくつかの実施形態では、比較的剛性の材料(たとえば、ステンレス鋼)から形成される。いずれの場合でも、洗浄管44は末端120と基端122との間に延びる。基端122は、従来の設計の顎124に流体的に接続されるかまたはこれを形成し、その他の方法で液体源の管への流体的な接続を容易にするように適合可能である。以下にさらに詳細に説明するように、洗浄管44は、末端120が筐体40の前端60に隣接する、好ましくは筐体40の前端60から末端方向に間隔を置いて配置されるように、筐体40に組み付けられる。他の実施形態では、洗浄管44は除去してもよい。
【0018】
提供される場合、任意選択の軸受部材46およびカラー48は、筐体40に対するその回転中に、工具軸30(図1)を支持する。したがって、軸受部材46は、適切な回転軸受面と共に、工具軸30の内径に相応する内径を画定する。たとえば、軸受部材46は転がり軸受型の組み立て体とすることができる。いずれの場合でも、軸受部材46は、好ましくは、前端60においてまたはこれに隣接して通路64の内側に配設および保持される。カラー48は、軸受部材46を補強するように機能し、軸受部材46が使用中に「蠕動」するのを防ぐことができ、かつ/または筐体40が前区分50に沿って裂けるのを防ぐことができる。したがって、カラー48はさまざまな形態を取ることが可能であり、(たとえば、前区分50の外面に沿って)軸受部材46の領域で筐体40に組み付けられる。カラー48は、ステンレス鋼などの構造的に剛性の材料から形成することができる。他の実施形態では、軸受部材46および/またはカラー48の一方または両方を省いてもよい。
【0019】
上記に加えて、保護装置22は1つまたは複数の他の構成要素を含むことができる。たとえば、Oリング126または類似のエラストマー体は、保持器128によって筐体40に対して設けられ、維持され、または捕捉される。保持器128は、図示されるように筐体40に組み付けられた、別個に形成された構成要素であってもよいし、筐体40の一部として一体的に形成されてもよい。以下に説明されるように、Oリング126は、筐体40に振動減衰をもたらす。あるいは、Oリング126を省いてもよい。
【0020】
上述のように、保護装置22は最終的な組み立てられた形で図2Bに示されている。この場合も、巻線34は、第1端104が通路64において露出され、通路64の内側に突出するように、筐体40に付着される。提供される場合、洗浄管44も筐体40に対して付着される。たとえば、洗浄管44は、蓋板42内に密着し、蓋板42と筐体40との間などに捕捉され得る。図示のように、洗浄管44の末端120は、筐体40の前端60に隣接するか、またはこれから末端方向に間隔を置いて配置される。この配置によれば、洗浄管44の末端120から分配される液体が通路64に入る可能性は低い。液体(または標的部位における他の材料)が進入する可能性をさらに最小限にするために、保護装置22は、図2Cに示されるように筐体40に組み付けられたリップシール130をさらに含むことができる。リップシール130は、PTFEまたは他のエラストマーなどのさまざまな材料から形成することができ、工具軸30(全体として描かれる)の直径より小さい直径を有する偏向可能なフランジ132を形成する。この場合、通路64内での工具軸30の組み立て時に、リップシール130および特にフランジ132は、工具軸30に対して密封される。他の実施形態では、リップシール130は省いてもよい。
【0021】
ハンドピース26への保護装置22および切除工具24の組み付けが図3に示される。1つの参考として、ハンドピース26はさまざまな形態を取ることが可能であり、一般に外部筐体150を含む。ハンドピース26は、工具軸30へのモータ組立体28(図1)の接続を達成するのに有用な追加の構成要素をさらに含む。たとえば、ハンドピース26は、軸受組立体構造154を維持する伸長片(すなわち「突端」)152を含むことができる。その他の方法で図3に反映されない追加の構成要素も提供され得る。いずれの場合でも、外部筐体150は、その内側にモータ組立体28の駆動部材158が維持される内部孔156を確立または画定し、駆動部材158は、工具軸30と(概略的に示された)モータ160の接続を達成する。
【0022】
ハンドピース26の上記の全体的な構造を考慮すると、図示のように、保護装置22は外部筐体150に着脱自在に組み付けられる。たとえば、いくつかの実施形態では、外部筐体150は、保護装置筐体40の指部82によって提供される掛け金84を着脱自在に捕捉するようなサイズを有する縁162を含むことができる。この構成によれば、ハンドピース26および特に外部筐体150への保護装置22のスナップ嵌合組み付けが提供され、外部筐体150から筐体40を強制的に末端方向に離すことによって保護装置22がハンドピース26から外される。保護装置22の挿入または取り外しにより、指部82は偏向し、掛け金84を縁162と係合させ、またはこれから外させる。上述のように、多種多様な他の構造は同様に、保護装置22とハンドピース26との間の着脱自在な接続を達成するのに適用できる。
【0023】
保護装置22がハンドピース26に組み付けられるとき、筐体40の通路64は、孔156に位置合わせされ、またはこれに対して開いており、それによって切除工具24の組み立てを可能にする。1つの参考として、切除工具24は、所望の外科切除または微小切除手技を実行するのに適切な、知られている、または将来考案される、任意の数の構成を取ることができる。基本的な説明において、切除先端32は、工具軸30の末端領域162に取り付けられるか、またはこれによって形成される。切除先端32は、適切なサイズおよび形状のバー型突端(たとえば、円形のバー、ドングリ形のバーなど)とすることができる。さらに、工具軸30が比較的まっすぐに示されているが、他の構成では、工具軸30は、1つまたは複数の曲線を有することが可能であり、外管によって外部から支持されてもよい。いずれの場合でも、工具軸30および切除先端32は、M2鋼などの外科的に安全な硬質の材料から形成される(切除先端32の材料が工具軸30の材料と異なってもよいことが理解される)。
【0024】
上記の配置によれば、工具軸30は、駆動部材158と選択的に結合するために、保護装置筐体40の前端開口66を通過し、通路64を通って、ハンドピース26の孔156に挿入することができる。図3に反映されるように、中間区分52を通過しての工具軸30の挿入時に、ワイヤ100の露出された第1端104は、工具軸30と物理的に接触する。この点に関して、工具軸30の一部分は(以下で説明されるように)非導電性絶縁材料の内側に取り巻かれ、工具軸30の接触領域170は、ワイヤ端104との電気的な結合を確立することができる。したがって、たとえば、切除軸30が導電性金属から形成される場合、接触領域170は絶縁材料によって露出されるか、またはその他の方法で「覆われ」ない。この構造によれば、その場合、露出されたワイヤ端104は、切除工具24の回転を伴う、(電気スリップリングと類似する)工具軸30に対する低摩擦、低摩耗の摺動電気接触を形成する。その結果、接触領域170における第1のワイヤ端104と工具軸30との電気接触により、導電性経路がワイヤ100の第2端106から切除先端32まで確立される。
【0025】
上述のように、いくつかの実施形態では、任意選択の軸受部材46は、ハンドピース26より末端側の位置において切除工具24の回転を可能にする形で工具軸30と係合し、高速度回転中に切除工具24の揺動および/または振動を最小限にするように機能する。この点に関して、カラー48は、含まれる場合、軸受部材46に対する追加の支持を行い、切除工具24の回転中に工具軸30に沿った軸受部材46の起こりうる蠕動を最小限にし、前区分50に沿った裂け目に対して筐体40を補強する。
【0026】
最終的に、図3に反映されるように、最終組み立て時に、任意選択のOリング126は、保持器128によって維持されるように、(たとえば、伸長片152において)外部筐体150に当接する。この関係により、Oリング126は、モータ組立体28の動作中に、保護装置筐体40内の振動を抑制する。
【0027】
正確な形態を問わず、組み立てられた外科切除器具20は、外科システムの一部として種々の外科切除手技を実行する際に有用であり、このシステムは切除先端32を介する標的部位への電気エネルギの伝達を含んでも含まなくてもよい。たとえば、図4は、器具20を含む外科切除システム200を示す。さらに、システム200は、(全体的に示される)モータ組立体28に電力を供給する電源202、ならびに保護装置22に電気的に接続されたエネルギ源204を含む。電源202は、さまざまな形態を取ることが可能であり、(たとえば、足踏スイッチなど任意選択のスイッチ装置206を介して)モータ組立体28の電力供給を制御する機能ならびに動作パラメータ情報をユーザに提供することができる。たとえば、1つの構成では、電源202は、フロリダ州ジャクソンビルのメドトロニック・ゾーメド社(Medtronic Xomed,Inc.)から入手可能なXPS(登録商標)3000コンソールなどのドリルコンソールの一部として提供される。
【0028】
エネルギ源204も多種多様な形態を取ることが可能であり、所望の手技を実行するように構成され得る。たとえば、いくつかの実施形態では、システム200を用いて外科切除動作の一部として誘発電位モニタリングを実行し、エネルギ源204は、患者の誘発電位モニタシステムである。誘発電位モニタシステム204は、フロリダ州ジャクソンビルのメドトロニック・ゾーメド社から入手可能なNIM−Response(登録商標)2.0神経完全性モニタシステムなどの、神経完全性モニタシステムとすることができる。全体的な説明では、誘発電位モニタシステム204は、通電された探針(たとえば切除先端32)が外科切除手技中に神経(図示せず)にいつ近接するかを示すように適合される。誘発電位モニタシステム204は、患者接続コンソール208と、種々の探針/電極および保護装置22をコンソール208に共通に結び付ける患者接続箱210とを含むことができる。たとえば、モニタシステム204は、EMG電極212a、212b、接地電極すなわち参照電極214、および刺激帰還経路電極216をさらに含むことができる。帰還経路電極216は、伝達された刺激電流が接地されて参照されない(したがって、自分の絶縁帰還を必要とする)絶縁出力である応用例に、切除先端32によって伝達される刺激電流の帰還経路を提供する。接地電極すなわち基準電極214は、患者218と(記録増幅器の入力範囲内でEMG電極212a、212bの信号を中心にするように要求される)モニタシステム204との間に共通の参照を形成する。参照電極214および帰還経路電極216は、患者218の種々の位置に配置されてよい。いずれの場合でも、切除先端32が患者218の非常に重要な解剖学的構造(たとえば、神経)の近傍にあることを検出するまたはその他の方法で判断するとき、モニタシステム204は、警告または他の妥当な情報をユーザに伝達するように適合される。
【0029】
図示のように、電源202は、適切な電気コネクタ230を介して外科切除器具20、特にモータ組立体28に電気的に結合される。モニタシステム/エネルギ源204は、保護装置22を備える巻線34に電気的に結合される。図4の1つの構成によれば、巻線34は電源/コンソール202のポートに接続され、電源/コンソール202は、パッチケーブル232を介して巻線と患者接続箱210(したがってエネルギ源204)との間の電気接続を確立する。他の構成では、巻線34は、患者接続箱210/エネルギ源204に直接接続されてもよい。しかし、図4の配置は、システム200の所望の電気絶縁を容易にすることができる。たとえば、切除工具24が電気的に絶縁されていない場合、(エネルギ源204を介して)切除工具24に加えられた電気エネルギがモータ組立体28に、および/またはハンドピース26内での物理的接触によりハンドピース26に伝導されることが可能な場合がある。このような状況下では、システム200の適切な接地がユーザの負傷やシステムの故障を回避するために所望され、BF定格(接地浮遊)装置として電源/コンソール202を提供することによって、およびモータ組立体28および巻線34をBF(接地浮遊)コンソール202に共通に接続することによって、達成することができる。あるいは、切除工具24が電気的に絶縁されている場合、電源コンソール202は他の形態(たとえば、接地装置)を取ることができ、巻線34は、エネルギ源204/患者接続箱210に直接接続されてもよい。
【0030】
使用中、切除先端32は、外科切除が所望される手術の標的部位に向かって移動される。次に、切除工具204が、電源202によって電力を供給されるモータ組立体28を介して高速で回転される。これらの手技に関連して、エネルギ源204は、ワイヤ100(図2A)と工具軸30との間の直接接触によって確立された電気経路により、巻線34を介して切除先端32へ刺激エネルギ(たとえば、連続的なパルス電流)を伝達することを促進する。患者電極212〜216は、加えられた刺激エネルギに応答して神経に対する切除先端32の近傍を示す情報を有するエネルギ源/モニタシステム204を提供する。たとえば、加えられた刺激エネルギと患者電極212〜216から信号化された情報の比較に基づいて、エネルギ源モニタシステム204は、重要な神経の近接した距離にあるまたはその距離内にある通電された切除先端32を示す情報を検出することが可能であり、および/またはこの情報を外科医に提供することができる。同時に、モータ組立体28は、切除先端32を回転させるように電力供給される。したがって、同時のまたは実質的に同時の骨または組織の切除機能および神経探索機能が、システム200によって実行可能である。さらに、切除先端32が1つまたは複数の神経の近傍にあることが示されるとき、誘発電位モニタリングは、モータ組立体28が停止された(すなわち、「オフ」またはその他の方法で切除工具24を駆動させずに)システム200により実行可能である。
【0031】
外科器具20は、その端におけるエネルギ源への直接接続のために保護装置筐体40およびハンドピース26から離れる方向に延びる巻線34について説明されてきたが、他の実施形態では、その代わりに、巻線34はハンドピース26の対応する機構に電気接続するように構成され、ハンドピース26は(直接または間接的に)エネルギ源への電気接続を確立する。たとえば、図5は、保護装置236とハンドピース238とを含む代替外科器具234の一部分の簡略化された図である。保護装置236は、上述された保護装置22(図2B)と類似しており、一般に巻線242を維持する筐体240を含む。巻線242の第1端244は、電気的に露出されたワイヤ246(たとえば、炭素繊維ワイヤの一部である複数の広げられたワイヤ素線)を有するかまたは形成する。巻線242は、筐体240の外面の一部分に沿って延び、第2端248において終わる。第2端248は電気接触部品250であるか、またはこれに取り付けられる。図示のように、接触部品250は、筐体240の肉厚を貫通して突出し、筐体240の内部(すなわち、通路)内に電気的に露出される。電気接触部品250は、さまざまな材料(たとえば、黄銅、ステンレス鋼、金めっき材料など任意の導電性金属)から形成されることが可能であり、さまざまな形態を有することができる(たとえば、ばね荷重体とすることができる)。いずれの場合でも、巻線242の第1端244は、接触部品250に電気的に接続される。
【0032】
上記の実施形態と同様に、保護装置236およびハンドピース238は、ハンドピース238の末端部252上への配置などによって、筐体240がハンドピース238に着脱自在に取り付け可能であるように構成される。この目的のため、ハンドピース238は、上述されたハンドピース26(図1)と類似しており、導電性リング254とワイヤ256とをさらに含む。導電性リング254は、末端部252に対して外側に露出され、ワイヤ256に電気的に接続される。次に、ワイヤ256は、ハンドピース筐体258に沿って基端方向に延び、(直接に、または図4を参照して上述したエネルギ源への補助接続を確立する電源を介して)エネルギ源に接続可能なケーブル(図示せず)において終わってもよいし、これに沿って延びてもよい。いずれの場合でも、保護装置筐体236およびハンドピース末端部252は、ハンドピース238へのまたはこの上への保護装置236の最終組み付け時に接触部品250が導電性リング254と接触または電気的に連通するようなサイズおよび形状を有する。場合によっては、非導電性リング260は、導電性リング254を電気的に絶縁するように導電性リング254の両側に設けてもよい。
【0033】
上記の構造によれば、最終組み立て時に、電気経路が、接触部品250と導電性リング254との間の接触を介してハンドピースワイヤ256(およびしたがって、ワイヤ256に接続される任意のエネルギ源)と保護装置巻線第1端244との間に確立される。その結果、1つまたは複数の電源またはエネルギ源に接続するための器具234を有する単一のケーブルを用いることができる。
【0034】
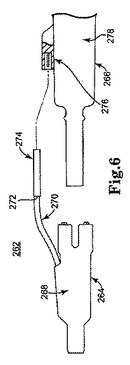
図6は、保護装置264とハンドピース266とを含む別の代替外科器具262の一部分の簡略化された図である。器具262は、上述された器具234(図5)と類似しており、保護装置264は巻線270を維持する筐体268を含む。巻線270は、筐体268の内部または通路の内に配設される端(図6では隠れている)において電気的に露出される。巻線270の第2端272は、(たとえば、ハンドピース266の筐体278の外面上に)ハンドピース266を備えた電気コンセント276に電気的に結合されるように適合された電気コネクタ274(たとえば、電気ピン)に接続されるか、またはこれを形成する。コンセント276はワイヤ(図示せず)に電気的に接続され、このワイヤはケーブル(図示せず)に接続されるか、またはこの一部として設けられる。ハンドピース266への保護装置264の組み付けは、コネクタ274とコンセント276との接続を含み、それにより保護装置巻線270との間の電気的連通を確立し、保護装置巻線270はケーブルを介して別個のエネルギ源(図示せず)に接続される。
【0035】
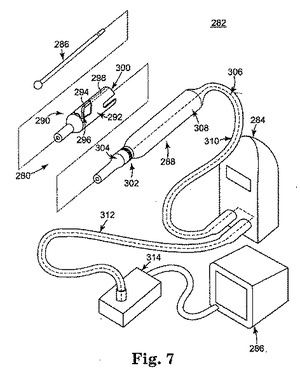
さらに別の代替外科器具280が、電源284とエネルギ源286とを含むシステム282の一部として図7に示されている。器具280は、切除工具286と、(モータ組立体(図示せず)を維持する)ハンドピース288と、保護装置290とを有する。保護装置290は、上述された実施形態のいずれかと類似しており、一般に筐体292と巻線294とを含む。巻線294の第1端296は、上述したように切除工具286と接触してこれとの電気経路を確立するために、筐体292の内部または通路の内に電気的に露出される。巻線294の第2端298は、筐体292の内部において保持された接触導体300であるか、またはこれに接続される。
【0036】
ハンドピース288は、上述された形態のいずれかを有することができ、その末端部分304に沿った導電性リング302を含む。導電性リング302は、ハンドピース288の筐体308内に保持されたワイヤ306に電気的に接続される。次に、ワイヤ306はケーブル310に沿って延び、ケーブル310は、モータ組立体(図示せず)に接続されるワイヤなど、1つまたは複数の他のワイヤをさらに含む。
【0037】
上記の構造によれば、システム282の組み立ては、ハンドピース288への保護装置290の組み付け、次いで保護装置290を通した切除工具286の軸の挿入によるハンドピース288(およびそれにより保持されるモータ組立体(図示せず))への切除工具286の接続を含む。ケーブル310は、電源284(たとえば、ドリルコンソール)に接続され、電源284とモータ組立体との間の電気接続を確立する。パッチケーブル312は、たとえば中間の患者接続箱314を介して、電源284をエネルギ源286に接続する。いずれの場合でも、電気的連通は、エネルギ源286から保護装置巻線294の第1端296へ、したがって切除工具286までの通路に沿って確立される。その場合、そのように構成されたシステム282は、上述したように動作することができる。
【0038】
図4を参照して上述したように、刺激エネルギは、切除工具24に直接加えられる。本開示の外科切除器具は、切除先端32および工具軸30が共通して導電性金属材料(たとえば、M2鋼)から形成される「標準的な」切除工具構成を組み込むまたは利用することができる。BF(接地浮遊)電源を使用すると、非絶縁切除工具24を有するシステム200の許容可能な動作が促進される。しかし、他の実施形態では、切除工具24は、切除工具24をハンドピース26から電気的に絶縁するように非導電性機構を組み込むように構成可能である。
【0039】
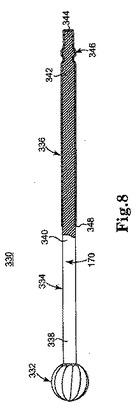
たとえば、図8は、切除器具20(図1)で有用な代替の切除工具330を示す。切除工具330は、切除先端332と、工具軸334と、非導電性絶縁材料336とを含む。全体的な説明では、切除先端332は工具軸344に取り付けられ、絶縁材料336は工具軸334の一部分に適用され、その部分を電気的に絶縁するように機能する。工具軸334は、末端区分338と、中間区分340と、基端344において終わる基端区分342とを画定する。末端区分338は、切除先端332に取り付けられるか、またはその他の方法でこれを形成する。1つの参考として、切除先端332は上述された形態のいずれかを取ることが可能であり、たとえばバー型の切除先端である。いずれの場合でも、基端区分342は、モータ組立体28(図3)に関連する駆動部材158(図3)に取り付けられるように構成される。したがって、たとえば、基端区分342は、駆動部材158の対応する機構と着脱自在に接続するようなサイズおよび形状を有する係合機構346を形成することができる。係合機構346は、具体的に示される形状と異なる他のさまざまな形状を取ることが可能である。
【0040】
絶縁材料336は、基端区分342および中間区分340の一部分に沿って工具軸334の外面上に適用される。この点に関して、絶縁材料336は、基端344を取り巻くまたは覆う。絶縁材料336の長さまたは(すなわち、工具軸334の長手方向の長さに対する)範囲は、切除器具20のさまざまな機構により選択される。たとえば、および図3を参照すると、ハンドピース26への保護装置22の組み付け時の駆動部材158と第1のワイヤ端104の長手方向の距離が分かる。したがって、工具軸30の長さに対する(したがって、工具軸334に対する)接触領域170の位置も分かる。その場合、これを考慮すると、絶縁材料336は、接触領域170(図8で全体的に示される)より基端側にある端348において終わる。その場合、この構造によれば、ハンドピース26への切除工具330の組み付け時、接触領域170は、第1のワイヤ端104との所望の電気結合を確立するために電気的に「露出」される。
【0041】
絶縁材料336は、さまざまな形態を取ることが可能であり、さまざまな方法で工具軸334に適用可能である。いくつかの構成では、絶縁材料336は、工具軸334上へ熱収縮させた非導電性ポリエステル材料(たとえば、管)である。
【0042】
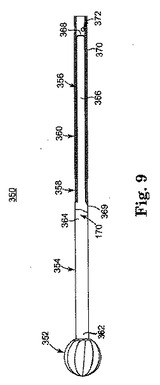
外科器具20(図1)で有用な別の切除工具350が図9に示されている。切除工具350は、切除先端352と、工具軸354と、非導電性絶縁材料356と、スペーサ358と、連結部材360とを含む。工具軸354は切除先端352を維持し、絶縁材料356は工具軸354の一部分の上に適用される。連結部材360は、絶縁材料356の領域で工具軸354上に組み付けられる。最終的に、スペーサ358は、工具軸354と連結部材360との間の電気絶縁を維持する。
【0043】
工具軸354は、末端区分362と、中間区分364と、基端368において終わる基端区分366とを画定する。切除先端352は、末端区分362に取り付けられるか、またはこれによって形成される。上述の構成と同様に、切除先端352および工具軸354は、M2鋼などの硬化された導電性材料から形成される。工具軸354の長さに対して、中間区分364は肩369を形成する。肩369は、基端区分366から末端区分362にかけて工具軸354の直径が増加したことを表す。上述された構成と相応して、肩369は、接触領域170より基端側に設置される。すなわち、肩369は、ハンドピース26(図3)への組み付け時に第1のワイヤ端104(図3)が工具軸354に接触する位置より基端側となるように形成される。
【0044】
絶縁材料356は、工具軸354の外面上に適用され、基端区分366の全体および中間区分364の一部分に沿って肩369まで延びる。絶縁材料356はさまざまな形態を取ることが可能であり、いくつかの構成では、ポリエステルフィルムまたは工具軸354上に熱収縮させた(たとえば、管形状の)材料である。スペーサ358は、非導電性材料(たとえばプラスチック)から形成され、工具軸354上に組み付けられるように構成される。たとえば、いくつかの実施形態では、スペーサ358はリングである。これらの構成によれば、リングの内径は、肩369より基端側での工具軸354の直径に相応する。したがって、スペーサ358は、スペーサ358を基端368から肩369との接触点まで摺動させることによって、工具軸354上に同軸状に組み付けられることができる。さらに、スペーサ358は、肩369より末端側での工具軸354の外径に相応する外径または厚さを有する。
【0045】
連結部材360は、高速度回転中に駆動部材158(図3)との接続を維持するのに適切な比較的剛性の材料から形成される。この点に関して、連結部材360の基端領域370は、駆動部材158の対応する機構と着脱自在に結合するように適合された係合機構372を形成するか、またはこれを含む。いくつかの構成によれば、連結部材360はステンレス鋼管であるが、他の構造も考えられる。管として提供される場合、連結部材360の内径は、肩369より基端側での工具軸354の直径に相応するが、連結部材360の外径は、肩369より末端側での工具軸354の直径に相応する。
【0046】
切除工具350の組み付けは、図示のように工具軸354の提供または形成を含むことができる。絶縁材料356は、基端区分366および中間区分364の一部分の上に肩369まで適用される(たとえば、工具軸354上に熱収縮される)。次に、スペーサ358および連結部材360が工具軸354上に装着される。次に、切除工具350が加熱され、絶縁材料356を溶融させる。冷却時に、絶縁材料356が再凝固し、工具軸354と連結部材360との間の結合を達成する。いずれの場合でも、連結部材360は、絶縁材料356およびスペーサ358を介して、接触領域170(および肩369より末端側の工具軸354の他のすべての部分)から電気的に絶縁される。この点に関して、切除工具350は堅牢な構成を有し、必要な絶縁耐力を示しながら、高速度回転中の耐久性を維持することが可能である。
【0047】
外科切除器具(図1)で有用な切除工具374の別の構成が図10に示されている。切除工具374は、切除先端376と、工具軸378と、誘電体層380と、スペーサ382と、連結部材384とを含む。工具軸378は、上述された工具軸354(図9)と類似しており、その末端区分388と基端区分390との中間に肩386を形成する。この場合も、肩386は、基端区分390から末端区分388にかけて工具軸378の直径が増加したことを反映しており、(全体的に示される)接触領域170より基端側に置かれる。スペーサ382は、非導電性材料から形成され、肩386に接し、これから基端方向に延びるように工具軸378上に組み付けられる。連結部材384も、工具軸378の基端区分390上に組み付けられ、たとえば係合機構392を介して、駆動部材158(図3)に着脱自在に接続されるように構成される。さらに、連結部材384は、高速度回転中にその完全性を維持することが可能な、ステンレス鋼などの硬化された材料から形成される。最終的に、連結部材384は、誘電体層380を介して工具軸378に付着される。より具体的には、誘電体層380は、連結部材384を工具軸378に接合する際に接着性を示す。さらに、スペーサ382と共に誘電体層336は、連結部材384を工具軸378から電気的に絶縁する。
【0048】
切除工具330(図8)、350(図9)、および374は最終組み立て時にハンドピース26(図3)に対して電気絶縁を提供すると説明してきたが、他の実施形態では、切除工具は非導電性機構がない従来の構成を有することができる。これらの構成によれば、1つまたは複数の他の機構をハンドピース26に組み込んで切除工具からの電気絶縁を促進すると有用な場合がある。たとえば、本開示のいくつかの態様による外科切除器具400が図11に示されている。器具400は、上述された保護装置22と(非絶縁形の)切除工具24とを含む。さらに、器具400は、モータ組立体404を維持するハンドピース402を含む。ハンドピース402は、以下に説明する他の構成要素と共に外部筐体406を含む。モータ組立体404は、駆動部材410に接続されたモータ408を全体として含む。切除工具24および駆動部材410は、適切な係合機構を介してそれらの間に着脱自在な結合を達成するように構成される。以下に説明されるように、ハンドピース402は、(その他の方法でワイヤ100により通電されるとき)切除工具24を外部筐体406から電気的に絶縁するように構成される。
【0049】
たとえば、いくつかの構成では、ハンドピース402は、たとえば1つまたは複数の軸受組立体422a、422bとスリーブ424とからなる軸受組立体構造420を含む。軸受組立体422a、422bは、導電性または非導電性の材料から形成されるさまざまな形態(たとえば、転がり軸受組立体)を取ることが可能である。いずれの場合でも、軸受組立体422a、422bは、ハンドピース402への組み付け時に工具軸30をその他の方法で摩擦受入れして支持するスリーブ424を回転自在に維持する。この点に関して、スリーブ424は、セラミックなどの耐久性がある非導電性材料から形成される。駆動部材410も、セラミックなどの耐久性がある非導電性材料から形成される。
【0050】
上記の構成によれば、ハンドピース402への切除工具24の組み付け時に、工具軸30は、駆動部材410およびスリーブ424のみと直接接触する。さらに、切除工具24はまた、任意選択の軸受部材46など、保護装置22の1つまたは複数の機構とも物理的に直接接触してもよい。このような状況下では、器具400は、非絶縁切除工具24を外部筐体406から電気的に絶縁する。より具体的には、駆動部材410およびスリーブ424は非導電性材料から形成され、したがって電気エネルギが駆動部材410またはスリーブ424を介してハンドピース402の他の構成要素に伝播されない。さらに、保護装置筐体40は非導電性材料から形成され、したがって電気エネルギは保護装置筐体40とハンドピース402との間の接続領域または接触領域に伝播されない。そのため、使用中、電気刺激エネルギは、ユーザが外部筐体406を握っている間にワイヤ100を介して工具軸30に安全に加えられることができる。
【0051】
あるいは、またはさらに、ハンドピース402の他の構成要素は、切除工具24からの外部筐体406の電気絶縁を達成するように構成可能である。たとえば、上述したように、軸受組立体構造420は、軸受組立体422a、422bを含むことができる。より具体的には、いくつかの構成では軸受組立体422a、422bはそれぞれ、内輪430と、外輪432と、それらの間に捕捉される複数の転がり軸受434とからなる。輪430、432は、任意の所望の材料から形成されることが可能であり、この材料は導電性であってもなくてもよい。しかし、球434は、セラミックなど、硬化された非導電性材料から形成される。軸受組立体構造420に加えて、ハンドピース402は、切除工具24/駆動部材410接続部を回転自在に支持するために駆動部材410の末端442に隣接して設置される中間軸受組立体440をさらに含むことができる。さらに、基端軸受組立体444は、駆動部材410/モータ408接続部を支持するために駆動部材410の基端446に隣接して設けることができる。軸受組立体440、444は、上述された軸受組立体422a、422bに類似しており、それぞれ内輪450と、外輪452と、それらの間に捕捉された複数の転がり軸受454とを含む。この場合も、輪450、452は、導電性または非導電性の任意の所望の材料から形成されることができる。しかし、転がり軸受454は、セラミックなど、硬化された非導電性材料から形成される。特に、ハンドピース402は軸受組立体422a、422b、440、444を外部から支持する追加の機構または構成要素を含むが、これらの構造は切除工具24または駆動部材410と物理的に直接接触しない。すなわち、保護装置22を除いて、外部筐体406と切除工具24との間の電気経路と、外部筐体406と駆動部材410との間の電気経路のみが、軸受組立体422a、422b、440、444を含む。対応する転がり軸受434、454の非導電性により、電気エネルギはこれらの通路を介して伝播されない。
【0052】
最終的に、駆動部材410をモータ408に接続する連結460が提供される。この構造によれば、連結器460または駆動部材410の少なくとも一方は、セラミックなどの非導電性材料から形成され、それによりモータ408を工具軸30から絶縁する。
【0053】
非導電性転がり軸受434、454は、非絶縁切除工具24を外部筐体406から電気的に絶縁する。さらに、非導電性筐体40は、保護装置22を外部筐体406から電気的に絶縁する。最終的に、非導電性の連結器460および/または駆動部材410は、非絶縁切除工具24をモータ408から電気的に絶縁する。その場合、この構造によれば、切除工具24は、外部筐体406およびモータ408から電気的に絶縁される。
【0054】
本明細書において特定の実施形態を図示し説明してきたが、本開示の精神および範囲から逸脱することなく、図示し説明された特定の実施形態の代わりにさまざまな代替的/等価的な移し替え(implantation)を実施できることが、当業者には理解されよう。本出願は、本明細書において説明した特定の実施形態の任意の適用または変更を包含することを意図するものである。したがって、本開示は特許請求の範囲およびその等価物によってのみ限定されることを意図するものである。
【技術分野】
【0001】
本開示は、外科切除ならびに外科切除器具およびシステムに関する。より詳細には、諸態様は、高速切除機能および電気探索機能の両方または誘発電位モニタリング機能が可能である外科切除器具およびシステム、ならびにそのようなシステムで有用な構成要素に関する。
【背景技術】
【0002】
末端に切除先端(たとえば、バー)を有する細長い切除工具を用いる外科微小切除器具は、種々の外科切除手技、たとえば、狭い入口または通路を介して手術部位へのアクセスが得られる手技における使用に広く受け入れられている。この切除工具は所望の切除手技を行うためにモータによって回転自在に駆動され、ハンドピースはこの切除工具とモータとの連結を達成および維持する。この切除工具は、ハンドピース単独で支持されてもよいし、追加の支持を得るために外管内に配設されてもよい。
【発明の概要】
【発明が解決しようとする課題】
【0003】
微小切除手技(たとえば、ENT)は典型的には、通常なら神経または他のデリケートな身体構造の近傍にある身体領域からの組織や骨などの除去を伴う。このため、不注意な切除または過熱により神経(または他の組織)を潜在的に切断あるいはその他の方法で損傷を与えるという危険が存在する。したがって、従来の微小切除手技は多くの場合、手技を安全に完了するために神経の位置を判断する追加のステップと器具とを必要とする。たとえば、誘発電位モニタリング装置は、与えられた刺激エネルギに対する患者の反応を介して神経に対する切除先端の位置を定期的に評価するために用いることができる。そのような手技を実行する間、外科医は微小切除器具を使って組織/骨を連続的に除去するように求められ、次にその他の方法で誘発電位モニタリング装置を備えた別個の用具を使用して、神経(または他の身体構造)を切除する区域を探索するように求められることがある。これは明らかに時間がかかり、したがって望ましくない。最近では、たとえば本願の権利者が所有する米国特許公開第2007/0100378号に記載されているような、切除器具が切除と(誘発電位モニタリングに関連して)電気刺激との両方を提供するシステムが提案されている。そのような構造におけるどんな改善も広く受け入れられる。
【課題を解決するための手段】
【0004】
本開示の原理によるいくつかの態様は、外科切除システムと共に使用する保護装置に関する。この保護装置は、筐体と巻線とを含む。筐体は、前端と、後端と、それらの間に延びる長手方向の通路とを画定する。この点に関して、通路は、その他の方法で外科切除器具ハンドピースを着脱自在に受けるようなサイズの後端開口において開いており、切除工具軸を着脱自在に受けるようなサイズの前端開口においても開いている。巻線は筐体に結合され、導電性ワイヤと非導電性絶縁材料とを含む。ワイヤは、対向する第1端および第2端を画定し、第1端は通路内に設置される。絶縁材料は、ワイヤの第1端が通路内に露出されるように、第1端を除いたワイヤの少なくとも大部分を覆う。この構造によれば、通路内への配置時に、ワイヤの第1端は、切除工具軸と電気接続とを確立する。ワイヤの第2端は、別個のエネルギ源に直接的にまたは間接的に電気的に結合される。したがって、ワイヤは、切除工具軸との接触により手術部位への刺激エネルギの伝達を容易にする。いくつかの実施形態では、ワイヤの第1端は、ワイヤのブラシ型構造を形成する複数のワイヤ素線を含む。
【0005】
本開示の原理による他の態様は、切除工具とモータ組立体とハンドピースと保護装置とを含む外科切除システムに関する。切除工具は、切除先端と工具軸とを含む。モータ組立体は、駆動機構を回転自在に駆動するモータを含む。ハンドピースは、モータ組立体を維持しており、ハンドピースによって画定される孔内での工具軸と駆動機構との選択的な接続を容易にするように構成される。最終的に、保護装置は、筐体と、それに結合された巻線とを含む。筐体は、前端と、後端と、それらの間に延びる長手方向の通路とを画定する。後端は、通路の後端開口を介してハンドピースに着脱自在に取り付けられるように構成される。さらに、前端は、前端開口を介して通路内での工具軸の選択的な配置を可能にするように構成される。巻線は、導電性ワイヤと非導電性絶縁材料とを含む。ワイヤは、対向する第1端と第2端を画定する。第1端は、通路内に設置される。絶縁材料は、第1端が通路内に露出されるように、第1端を除いたワイヤの少なくとも大部分を取り巻く。この構造によれば、最終組み立て時に、ハンドピースは通路内に配設される。工具軸は、通路を貫通して孔内に延び、駆動機構に接続される。最終的に、ワイヤの第1端は工具軸と接触する。したがって、電気経路が、ワイヤの第2端から切除先端まで確立される。所望される場合、保護装置は、ハンドピースとの取り付けから除外されることができる。いくつかの実施形態では、システムは、ワイヤの第2端に選択的に電気的に結合されるエネルギ源を有する誘発電位モニタリングシステムをさらに含む。これらの代替構造によれば、エネルギ源は、ワイヤおよびワイヤの第1端と工具軸との間の接触を介して刺激エネルギを切除先端に加える。さらに他の実施形態では、ハンドピースは外部筐体を含み、切除工具を外部筐体から電気的に絶縁するように構成される。
【0006】
本開示の原理によるさらに他の態様は、外科切除手技を実施する方法に関する。この方法は、基端側と末端側と中心孔とを画定するハンドピースを提供することを含む。保護装置も提供され、筐体と巻線とを含む。筐体は、後端開口と前端開口との間に延び、それらにおいて開いている長手方向の通路を画定する。ワイヤは筐体に結合され、通路内に設置される第1端を含む。さらに、非導電性絶縁材料は、ワイヤの第1端が通路内に露出されるように、第1端を除いたワイヤの少なくとも大部分を覆う。保護装置筐体は、通路が孔に開くように、ハンドピースの末端側に組み付けられる。切除工具の工具軸は、切除工具の切除先端が保護装置より末端側に設置されるように、通路の前端内を通って孔内へ延びる。さらに、挿入時に、ワイヤの第1端は工具軸と接触する。工具軸はまた、ハンドピースによってその他の方法で維持されるモータ組立体の駆動機構にも装着される。誘発電位モニタリングシステムは、誘発電位モニタリングシステムのエネルギ源が切除先端と電気的に連通するように、ワイヤの第2端に電気的に接続される。次に、切除先端が手術部位に送達される。モータ組立体は、手術部位において切除先端を用いて切除動作を実施するように操作される。刺激エネルギは、エネルギ源を介して切除先端に加えられ、神経に対する切除先端の近接は、EMG反応などの刺激エネルギに対する参照に基づいて検出される。
【図面の簡単な説明】
【0007】
【図1】本開示の諸態様による保護装置を含む外科切除器具の分解組立図である。
【図2A】図1の保護装置の分解断面図である。
【図2B】最終組み立て時の図2Aの保護装置を示す図である。
【図2C】本開示の諸態様による別の保護装置の一部分の簡略化された断面図である。
【図3】最終組み立て時の図1の器具の断面図である。
【図4】図1の器具を含む外科切除システムのブロック図である。
【図5】本開示の諸態様による別の外科切除器具の簡略化された側面図である。
【図6】本開示の諸態様による別の外科切除器具の簡略化された側面図である。
【図7】本開示の諸態様による別の外科切除システムの簡略化された斜視図である。
【図8】図1の器具で有用な切除工具を、断面図形式で示された一部分と共に示す側面図である。
【図9】図1の器具で有用な切除工具を、断面図形式で示された一部分と共に示す側面図である。
【図10】図1の器具で有用な切除工具を、断面図形式で示された一部分と共に示す側面図である。
【図11】本開示の諸態様による別の外科器具の断面斜視図である。
【発明を実施するための形態】
【0008】
本開示の原理による保護装置22を含む外科切除器具20が図1に示される。器具20は、切除工具24およびモータ組立体28を維持するハンドピース26と共に保護装置22を含む(全体的に示される)。種々の構成要素の詳細が以下に示される。しかし、全体的な説明では、切除工具24は、工具軸30と切除先端32とを含む。保護装置22は、ハンドピース26に着脱自在に取り付けられ、ハンドピース26内で内部的にモータ組立体28への工具軸30の着脱自在な接続を可能にする。さらに、保護装置22は、巻線34を提供する。保護装置22がハンドピース26に組み付けられるとき、ならびに切除工具24がハンドピース26/モータ組立体28に組み付けられるとき、巻線34は工具軸30との電気接続を確立する。次に、使用中に、巻線34は、工具軸30と巻線34との間の内部的な電気接続を介して、電源(図示せず)から切除先端32に電気エネルギを伝達する。したがって、外科器具20は、切除先端32における切除刺激および電気刺激(たとえば、誘発電位モニタリング)が所望される種々の手技で非常に有用である。
【0009】
保護装置22は、図2Aおよび図2Bにさらに詳細に示されている。保護装置22は、巻線34に加えて、筐体40と、任意選択の蓋板42と、任意選択の洗浄管44と、任意選択の軸受部材46と、任意選択のカラー48とを含む。全体的な説明では、巻線34は、たとえば蓋板42を介して、筐体40に付着される。この点に関して、以下にさらに詳細に説明されるように、巻線34の端は、筐体40内部内に露出される。洗浄管44は、筐体40にも付着され、筐体40末端側への液体の送出通路を形成する。しかし、他の構成では、洗浄管44は除去してもよい。提供される場合、軸受部材46は、使用中に工具軸30(図1)を回転自在に支持し、カラー48は、軸受部材46/工具軸30接続部を補強する。
【0010】
筐体40は多種多様な形態を取ることが可能である。図2Aに示されるように、筐体40は、前区分50、中間区分52、および後区分54を全体的に画定するので、区分50〜54は、筐体40が均一な構造となるように一体的に形成されることが理解される。いずれの場合でも、前区分50は前端60において終わり、後区分54は後端62において終わり、筐体40は、端60と62との間に延びる長手方向の通路64を形成する。通路64は、前端開口66により前端60において開いている。さらに、通路64は、後端開口68により後端62において開いている。これらの指示を考慮すると、通路64は、前端開口66において、切除工具24(図1)の摺動挿入および取り外しを可能にするようなサイズを有する。たとえば、いくつかの構成では、通路64は、前区分50に沿って第1の部分70および第2の部分72を有するように画定される。第1の部分70は、(提供される場合)軸受部材46を受ける(たとえば、摩擦受入れして維持する)ようなサイズを有し、第2の部分72は、工具軸30(図1)の直径によりぴったり合致するようなサイズを有する。したがって、通路64の最小有効直径は、第2の部分72(中心軸C)に沿って画定される。通路64の最小有効直径はさらに、筐体40の他の領域および/またはそれに組み付けられる他の構成要素(切除工具24を除いて)によって、縮小または画定されてもよい。たとえば、軸受部材46は、第2の部分72の内径より小さい内径を有し、したがって軸受部材46が通路64の最小有効直径を画定するようにしてもよい。その場合、より全体的な説明では、通路64の最小有効直径は、筐体40への挿入時に切除工具24を直接支持するように設けられる面によって画定される。
【0011】
後区分54は、後端開口68を介してハンドピース26(図1)に着脱自在に取り付けるまたは結合するためのサイズである。たとえば、後区分54は、2つ以上の指部82を一括して画定する1つまたは複数の長手方向の溝80を形成することができる。指部82は、中心軸Cに対して(たとえば、径方向外側に)偏向可能である。いくつかの構成における筐体40の比較的堅固な構造は、指部82に偏り属性を付与し、したがって指部82が強制的に外側に偏向させられるときに、固有の偏りによって指部82が自ら移転して図2Aの方向に戻るようにする。いずれの場合でも、指部82はそれぞれ放射状の掛け金84において終わる。以下に説明されるように、指部82の偏向可能性によって、ハンドピース26上での筐体40の組み立てが可能になり、掛け金84は、ハンドピース26の対応する機構に選択的に係合する。しかし、別法として、ハンドピース26への筐体40の着脱自在な取り付けを実行できる多種多様な他の構造も許容できる。筐体40がハンドピース26(図1)に着脱自在に取り付けられる形態を問わず、通路64は、少なくとも後区分54に沿ってハンドピース26の対応する寸法に相応するサイズ(たとえば、直径)を有する。中間区分52に対して、通路64は、前区分50(たとえば、通路64の第2の部分72)に沿った直径より大きい直径を有することができる。いずれの場合でも、筐体40は、中間区分52において筐体40の厚さを貫通する窓孔90をさらに含み、したがって窓孔90が、通路64ならびに筐体40の外面92に対して開く。以下にさらに詳細に説明されるように、窓孔90は、巻線34の一部分を受けるまたはその通過を可能にするようなサイズを有し、通路64に対して巻線34の所望の部分を維持する。
【0012】
筐体40は、図1および図2Aの各図に反映される形態とは異なる形態を取ることが可能である。しかし、いくつかの構造によれば、前区分50は、以下に説明するように、工具軸30(図1)の支持を容易にするために、その残りの部分に比べて小さいサイズ(たとえば、直径)を有する。いずれの場合でも、筐体40は、非導電性材料、たとえば非導電性のプラスチック材料またはセラミック材料から形成される。
【0013】
巻線34は、ワイヤ100と、非導電性絶縁材料102とを含む。ワイヤ100は、第1端104と第2端106を画定する、すなわちこれらの間に延びる。図2Aおよび図2Bに全体として反映されるように、絶縁材料102は、ワイヤ100の少なくとも大部分を取り巻く(すなわち電気的に絶縁する)ように、ワイヤ100に適用される。しかし、ワイヤ100の少なくとも第1端104は、絶縁材料102によって覆われず、したがって露出される。第2端106も、絶縁材料102に対して露出されてもよいし、または適切なエネルギ源(図示せず)に電気的に結合するように構成された適切な電気コネクタ(たとえば、ソケットコネクタ)を備えたりこれに取り付けられたりしてもよい。
【0014】
ワイヤ100は、1つまたは複数の従来の電気巻線材料から形成することができ、単一長のワイヤであってもよいし、一緒に束ねられた複数の個々のワイヤであってもよい。いくつかの構造によれば、ワイヤ100は炭素繊維ワイヤである。正確な材料を問わず、ワイヤ100は、少なくとも露出された第1端104において、ワイヤ100が、互いに対して個別に広げられた複数のワイヤ素線108を提供するように形成することができる。この構造によれば、第1端104はブラシ様構成を取る。たとえば、当初は、巻線34は従来の電気巻線(すなわち、その全長に沿って絶縁材料102によって取り巻かれるワイヤ100)として提供されることができ、絶縁材料102は第1端104から剥離されることができ、現在露出されている素線108は個別に広げられることができる。あるいは、ワイヤ100の第1端104が電気的に露出される限り、巻線34のさまざまな他の構造も許容できる。
【0015】
特に図2Bを参照すると、保護装置22の最終組み立て時に、巻線34は、ワイヤ100の第1端104が通路64内に設置され、第2端106が筐体40から離れるように、筐体40に取り付けられる。すなわち、最終組み立て時に、第2端106(および第2端106に隣接する巻線34のある区分)は、筐体40に対して移動可能であり、したがって所望のエネルギ源に容易に接続されることができる。1つの参考として、巻線34は短縮された形で図2Bに反映されているので、巻線34の長さは筐体40をはるかに超えて延びてもよいことが理解される。蓋板42を設けてもよく、筐体40の外面92に巻線34を固定するのを支援する。たとえば、巻線34は、第1端104が窓孔90を越えて通路64内にあるように筐体40に組み付けることができる。窓孔90から外側に延びる巻線34の区分は筐体外面92に設置され、蓋板42は巻線34上に適用される。提供される場合、蓋板42は非導電性材料(たとえば、プラスチック)から形成され、巻線34の固定時に筐体40(たとえば、超音波溶接)に付着される。あるいは、さまざまな他の製造技術を用いて巻線34を筐体40に組み付けることができ、筐体40は別個の蓋板42を含んでも含まなくてもよい(たとえば、巻線34は筐体40にインサート成形されることができる)。
【0016】
組み立て技術を問わず、巻線34は、ワイヤ100の第1端104が通路64内に設置されるように設置される。より具体的には、第1端104は、筐体40への挿入時に切除工具軸30(図1)に接触するように置かれる。たとえば、ワイヤ100が、広げられた素線108を含むように提供される場合、少なくともいくつかの素線108は放射状に通路64内に延び、中心軸C近傍の点Pにおいて終わる。より具体的には、第1端104の終点Pは、中心軸Cから径方向に、通路64の最小有効直径または半径(すなわち、第2の部分72に沿って軸受部材46によって画定される直径または半径)より短い間隔を空けられている。したがって、図2Bの方向に対して、ワイヤ端104の終点Pは、前区分50に沿って画定される上壁面110の「下に」延びる。この構成によれば、切除工具軸30は軸受部材46の直径(図2Bの1つの構成では)に相応する直径を有するので、ワイヤ端104との密接な物理的接触が保証される。軸受部材46が中心軸Cに対する工具軸30の位置を事実上決定するので、ワイヤ端104との接触が常に発生し維持される。
【0017】
保護装置22のいくつかの構成によれば、洗浄管44が設けられる。洗浄管44はさまざまな形態を取ることが可能であり、いくつかの実施形態では、比較的剛性の材料(たとえば、ステンレス鋼)から形成される。いずれの場合でも、洗浄管44は末端120と基端122との間に延びる。基端122は、従来の設計の顎124に流体的に接続されるかまたはこれを形成し、その他の方法で液体源の管への流体的な接続を容易にするように適合可能である。以下にさらに詳細に説明するように、洗浄管44は、末端120が筐体40の前端60に隣接する、好ましくは筐体40の前端60から末端方向に間隔を置いて配置されるように、筐体40に組み付けられる。他の実施形態では、洗浄管44は除去してもよい。
【0018】
提供される場合、任意選択の軸受部材46およびカラー48は、筐体40に対するその回転中に、工具軸30(図1)を支持する。したがって、軸受部材46は、適切な回転軸受面と共に、工具軸30の内径に相応する内径を画定する。たとえば、軸受部材46は転がり軸受型の組み立て体とすることができる。いずれの場合でも、軸受部材46は、好ましくは、前端60においてまたはこれに隣接して通路64の内側に配設および保持される。カラー48は、軸受部材46を補強するように機能し、軸受部材46が使用中に「蠕動」するのを防ぐことができ、かつ/または筐体40が前区分50に沿って裂けるのを防ぐことができる。したがって、カラー48はさまざまな形態を取ることが可能であり、(たとえば、前区分50の外面に沿って)軸受部材46の領域で筐体40に組み付けられる。カラー48は、ステンレス鋼などの構造的に剛性の材料から形成することができる。他の実施形態では、軸受部材46および/またはカラー48の一方または両方を省いてもよい。
【0019】
上記に加えて、保護装置22は1つまたは複数の他の構成要素を含むことができる。たとえば、Oリング126または類似のエラストマー体は、保持器128によって筐体40に対して設けられ、維持され、または捕捉される。保持器128は、図示されるように筐体40に組み付けられた、別個に形成された構成要素であってもよいし、筐体40の一部として一体的に形成されてもよい。以下に説明されるように、Oリング126は、筐体40に振動減衰をもたらす。あるいは、Oリング126を省いてもよい。
【0020】
上述のように、保護装置22は最終的な組み立てられた形で図2Bに示されている。この場合も、巻線34は、第1端104が通路64において露出され、通路64の内側に突出するように、筐体40に付着される。提供される場合、洗浄管44も筐体40に対して付着される。たとえば、洗浄管44は、蓋板42内に密着し、蓋板42と筐体40との間などに捕捉され得る。図示のように、洗浄管44の末端120は、筐体40の前端60に隣接するか、またはこれから末端方向に間隔を置いて配置される。この配置によれば、洗浄管44の末端120から分配される液体が通路64に入る可能性は低い。液体(または標的部位における他の材料)が進入する可能性をさらに最小限にするために、保護装置22は、図2Cに示されるように筐体40に組み付けられたリップシール130をさらに含むことができる。リップシール130は、PTFEまたは他のエラストマーなどのさまざまな材料から形成することができ、工具軸30(全体として描かれる)の直径より小さい直径を有する偏向可能なフランジ132を形成する。この場合、通路64内での工具軸30の組み立て時に、リップシール130および特にフランジ132は、工具軸30に対して密封される。他の実施形態では、リップシール130は省いてもよい。
【0021】
ハンドピース26への保護装置22および切除工具24の組み付けが図3に示される。1つの参考として、ハンドピース26はさまざまな形態を取ることが可能であり、一般に外部筐体150を含む。ハンドピース26は、工具軸30へのモータ組立体28(図1)の接続を達成するのに有用な追加の構成要素をさらに含む。たとえば、ハンドピース26は、軸受組立体構造154を維持する伸長片(すなわち「突端」)152を含むことができる。その他の方法で図3に反映されない追加の構成要素も提供され得る。いずれの場合でも、外部筐体150は、その内側にモータ組立体28の駆動部材158が維持される内部孔156を確立または画定し、駆動部材158は、工具軸30と(概略的に示された)モータ160の接続を達成する。
【0022】
ハンドピース26の上記の全体的な構造を考慮すると、図示のように、保護装置22は外部筐体150に着脱自在に組み付けられる。たとえば、いくつかの実施形態では、外部筐体150は、保護装置筐体40の指部82によって提供される掛け金84を着脱自在に捕捉するようなサイズを有する縁162を含むことができる。この構成によれば、ハンドピース26および特に外部筐体150への保護装置22のスナップ嵌合組み付けが提供され、外部筐体150から筐体40を強制的に末端方向に離すことによって保護装置22がハンドピース26から外される。保護装置22の挿入または取り外しにより、指部82は偏向し、掛け金84を縁162と係合させ、またはこれから外させる。上述のように、多種多様な他の構造は同様に、保護装置22とハンドピース26との間の着脱自在な接続を達成するのに適用できる。
【0023】
保護装置22がハンドピース26に組み付けられるとき、筐体40の通路64は、孔156に位置合わせされ、またはこれに対して開いており、それによって切除工具24の組み立てを可能にする。1つの参考として、切除工具24は、所望の外科切除または微小切除手技を実行するのに適切な、知られている、または将来考案される、任意の数の構成を取ることができる。基本的な説明において、切除先端32は、工具軸30の末端領域162に取り付けられるか、またはこれによって形成される。切除先端32は、適切なサイズおよび形状のバー型突端(たとえば、円形のバー、ドングリ形のバーなど)とすることができる。さらに、工具軸30が比較的まっすぐに示されているが、他の構成では、工具軸30は、1つまたは複数の曲線を有することが可能であり、外管によって外部から支持されてもよい。いずれの場合でも、工具軸30および切除先端32は、M2鋼などの外科的に安全な硬質の材料から形成される(切除先端32の材料が工具軸30の材料と異なってもよいことが理解される)。
【0024】
上記の配置によれば、工具軸30は、駆動部材158と選択的に結合するために、保護装置筐体40の前端開口66を通過し、通路64を通って、ハンドピース26の孔156に挿入することができる。図3に反映されるように、中間区分52を通過しての工具軸30の挿入時に、ワイヤ100の露出された第1端104は、工具軸30と物理的に接触する。この点に関して、工具軸30の一部分は(以下で説明されるように)非導電性絶縁材料の内側に取り巻かれ、工具軸30の接触領域170は、ワイヤ端104との電気的な結合を確立することができる。したがって、たとえば、切除軸30が導電性金属から形成される場合、接触領域170は絶縁材料によって露出されるか、またはその他の方法で「覆われ」ない。この構造によれば、その場合、露出されたワイヤ端104は、切除工具24の回転を伴う、(電気スリップリングと類似する)工具軸30に対する低摩擦、低摩耗の摺動電気接触を形成する。その結果、接触領域170における第1のワイヤ端104と工具軸30との電気接触により、導電性経路がワイヤ100の第2端106から切除先端32まで確立される。
【0025】
上述のように、いくつかの実施形態では、任意選択の軸受部材46は、ハンドピース26より末端側の位置において切除工具24の回転を可能にする形で工具軸30と係合し、高速度回転中に切除工具24の揺動および/または振動を最小限にするように機能する。この点に関して、カラー48は、含まれる場合、軸受部材46に対する追加の支持を行い、切除工具24の回転中に工具軸30に沿った軸受部材46の起こりうる蠕動を最小限にし、前区分50に沿った裂け目に対して筐体40を補強する。
【0026】
最終的に、図3に反映されるように、最終組み立て時に、任意選択のOリング126は、保持器128によって維持されるように、(たとえば、伸長片152において)外部筐体150に当接する。この関係により、Oリング126は、モータ組立体28の動作中に、保護装置筐体40内の振動を抑制する。
【0027】
正確な形態を問わず、組み立てられた外科切除器具20は、外科システムの一部として種々の外科切除手技を実行する際に有用であり、このシステムは切除先端32を介する標的部位への電気エネルギの伝達を含んでも含まなくてもよい。たとえば、図4は、器具20を含む外科切除システム200を示す。さらに、システム200は、(全体的に示される)モータ組立体28に電力を供給する電源202、ならびに保護装置22に電気的に接続されたエネルギ源204を含む。電源202は、さまざまな形態を取ることが可能であり、(たとえば、足踏スイッチなど任意選択のスイッチ装置206を介して)モータ組立体28の電力供給を制御する機能ならびに動作パラメータ情報をユーザに提供することができる。たとえば、1つの構成では、電源202は、フロリダ州ジャクソンビルのメドトロニック・ゾーメド社(Medtronic Xomed,Inc.)から入手可能なXPS(登録商標)3000コンソールなどのドリルコンソールの一部として提供される。
【0028】
エネルギ源204も多種多様な形態を取ることが可能であり、所望の手技を実行するように構成され得る。たとえば、いくつかの実施形態では、システム200を用いて外科切除動作の一部として誘発電位モニタリングを実行し、エネルギ源204は、患者の誘発電位モニタシステムである。誘発電位モニタシステム204は、フロリダ州ジャクソンビルのメドトロニック・ゾーメド社から入手可能なNIM−Response(登録商標)2.0神経完全性モニタシステムなどの、神経完全性モニタシステムとすることができる。全体的な説明では、誘発電位モニタシステム204は、通電された探針(たとえば切除先端32)が外科切除手技中に神経(図示せず)にいつ近接するかを示すように適合される。誘発電位モニタシステム204は、患者接続コンソール208と、種々の探針/電極および保護装置22をコンソール208に共通に結び付ける患者接続箱210とを含むことができる。たとえば、モニタシステム204は、EMG電極212a、212b、接地電極すなわち参照電極214、および刺激帰還経路電極216をさらに含むことができる。帰還経路電極216は、伝達された刺激電流が接地されて参照されない(したがって、自分の絶縁帰還を必要とする)絶縁出力である応用例に、切除先端32によって伝達される刺激電流の帰還経路を提供する。接地電極すなわち基準電極214は、患者218と(記録増幅器の入力範囲内でEMG電極212a、212bの信号を中心にするように要求される)モニタシステム204との間に共通の参照を形成する。参照電極214および帰還経路電極216は、患者218の種々の位置に配置されてよい。いずれの場合でも、切除先端32が患者218の非常に重要な解剖学的構造(たとえば、神経)の近傍にあることを検出するまたはその他の方法で判断するとき、モニタシステム204は、警告または他の妥当な情報をユーザに伝達するように適合される。
【0029】
図示のように、電源202は、適切な電気コネクタ230を介して外科切除器具20、特にモータ組立体28に電気的に結合される。モニタシステム/エネルギ源204は、保護装置22を備える巻線34に電気的に結合される。図4の1つの構成によれば、巻線34は電源/コンソール202のポートに接続され、電源/コンソール202は、パッチケーブル232を介して巻線と患者接続箱210(したがってエネルギ源204)との間の電気接続を確立する。他の構成では、巻線34は、患者接続箱210/エネルギ源204に直接接続されてもよい。しかし、図4の配置は、システム200の所望の電気絶縁を容易にすることができる。たとえば、切除工具24が電気的に絶縁されていない場合、(エネルギ源204を介して)切除工具24に加えられた電気エネルギがモータ組立体28に、および/またはハンドピース26内での物理的接触によりハンドピース26に伝導されることが可能な場合がある。このような状況下では、システム200の適切な接地がユーザの負傷やシステムの故障を回避するために所望され、BF定格(接地浮遊)装置として電源/コンソール202を提供することによって、およびモータ組立体28および巻線34をBF(接地浮遊)コンソール202に共通に接続することによって、達成することができる。あるいは、切除工具24が電気的に絶縁されている場合、電源コンソール202は他の形態(たとえば、接地装置)を取ることができ、巻線34は、エネルギ源204/患者接続箱210に直接接続されてもよい。
【0030】
使用中、切除先端32は、外科切除が所望される手術の標的部位に向かって移動される。次に、切除工具204が、電源202によって電力を供給されるモータ組立体28を介して高速で回転される。これらの手技に関連して、エネルギ源204は、ワイヤ100(図2A)と工具軸30との間の直接接触によって確立された電気経路により、巻線34を介して切除先端32へ刺激エネルギ(たとえば、連続的なパルス電流)を伝達することを促進する。患者電極212〜216は、加えられた刺激エネルギに応答して神経に対する切除先端32の近傍を示す情報を有するエネルギ源/モニタシステム204を提供する。たとえば、加えられた刺激エネルギと患者電極212〜216から信号化された情報の比較に基づいて、エネルギ源モニタシステム204は、重要な神経の近接した距離にあるまたはその距離内にある通電された切除先端32を示す情報を検出することが可能であり、および/またはこの情報を外科医に提供することができる。同時に、モータ組立体28は、切除先端32を回転させるように電力供給される。したがって、同時のまたは実質的に同時の骨または組織の切除機能および神経探索機能が、システム200によって実行可能である。さらに、切除先端32が1つまたは複数の神経の近傍にあることが示されるとき、誘発電位モニタリングは、モータ組立体28が停止された(すなわち、「オフ」またはその他の方法で切除工具24を駆動させずに)システム200により実行可能である。
【0031】
外科器具20は、その端におけるエネルギ源への直接接続のために保護装置筐体40およびハンドピース26から離れる方向に延びる巻線34について説明されてきたが、他の実施形態では、その代わりに、巻線34はハンドピース26の対応する機構に電気接続するように構成され、ハンドピース26は(直接または間接的に)エネルギ源への電気接続を確立する。たとえば、図5は、保護装置236とハンドピース238とを含む代替外科器具234の一部分の簡略化された図である。保護装置236は、上述された保護装置22(図2B)と類似しており、一般に巻線242を維持する筐体240を含む。巻線242の第1端244は、電気的に露出されたワイヤ246(たとえば、炭素繊維ワイヤの一部である複数の広げられたワイヤ素線)を有するかまたは形成する。巻線242は、筐体240の外面の一部分に沿って延び、第2端248において終わる。第2端248は電気接触部品250であるか、またはこれに取り付けられる。図示のように、接触部品250は、筐体240の肉厚を貫通して突出し、筐体240の内部(すなわち、通路)内に電気的に露出される。電気接触部品250は、さまざまな材料(たとえば、黄銅、ステンレス鋼、金めっき材料など任意の導電性金属)から形成されることが可能であり、さまざまな形態を有することができる(たとえば、ばね荷重体とすることができる)。いずれの場合でも、巻線242の第1端244は、接触部品250に電気的に接続される。
【0032】
上記の実施形態と同様に、保護装置236およびハンドピース238は、ハンドピース238の末端部252上への配置などによって、筐体240がハンドピース238に着脱自在に取り付け可能であるように構成される。この目的のため、ハンドピース238は、上述されたハンドピース26(図1)と類似しており、導電性リング254とワイヤ256とをさらに含む。導電性リング254は、末端部252に対して外側に露出され、ワイヤ256に電気的に接続される。次に、ワイヤ256は、ハンドピース筐体258に沿って基端方向に延び、(直接に、または図4を参照して上述したエネルギ源への補助接続を確立する電源を介して)エネルギ源に接続可能なケーブル(図示せず)において終わってもよいし、これに沿って延びてもよい。いずれの場合でも、保護装置筐体236およびハンドピース末端部252は、ハンドピース238へのまたはこの上への保護装置236の最終組み付け時に接触部品250が導電性リング254と接触または電気的に連通するようなサイズおよび形状を有する。場合によっては、非導電性リング260は、導電性リング254を電気的に絶縁するように導電性リング254の両側に設けてもよい。
【0033】
上記の構造によれば、最終組み立て時に、電気経路が、接触部品250と導電性リング254との間の接触を介してハンドピースワイヤ256(およびしたがって、ワイヤ256に接続される任意のエネルギ源)と保護装置巻線第1端244との間に確立される。その結果、1つまたは複数の電源またはエネルギ源に接続するための器具234を有する単一のケーブルを用いることができる。
【0034】
図6は、保護装置264とハンドピース266とを含む別の代替外科器具262の一部分の簡略化された図である。器具262は、上述された器具234(図5)と類似しており、保護装置264は巻線270を維持する筐体268を含む。巻線270は、筐体268の内部または通路の内に配設される端(図6では隠れている)において電気的に露出される。巻線270の第2端272は、(たとえば、ハンドピース266の筐体278の外面上に)ハンドピース266を備えた電気コンセント276に電気的に結合されるように適合された電気コネクタ274(たとえば、電気ピン)に接続されるか、またはこれを形成する。コンセント276はワイヤ(図示せず)に電気的に接続され、このワイヤはケーブル(図示せず)に接続されるか、またはこの一部として設けられる。ハンドピース266への保護装置264の組み付けは、コネクタ274とコンセント276との接続を含み、それにより保護装置巻線270との間の電気的連通を確立し、保護装置巻線270はケーブルを介して別個のエネルギ源(図示せず)に接続される。
【0035】
さらに別の代替外科器具280が、電源284とエネルギ源286とを含むシステム282の一部として図7に示されている。器具280は、切除工具286と、(モータ組立体(図示せず)を維持する)ハンドピース288と、保護装置290とを有する。保護装置290は、上述された実施形態のいずれかと類似しており、一般に筐体292と巻線294とを含む。巻線294の第1端296は、上述したように切除工具286と接触してこれとの電気経路を確立するために、筐体292の内部または通路の内に電気的に露出される。巻線294の第2端298は、筐体292の内部において保持された接触導体300であるか、またはこれに接続される。
【0036】
ハンドピース288は、上述された形態のいずれかを有することができ、その末端部分304に沿った導電性リング302を含む。導電性リング302は、ハンドピース288の筐体308内に保持されたワイヤ306に電気的に接続される。次に、ワイヤ306はケーブル310に沿って延び、ケーブル310は、モータ組立体(図示せず)に接続されるワイヤなど、1つまたは複数の他のワイヤをさらに含む。
【0037】
上記の構造によれば、システム282の組み立ては、ハンドピース288への保護装置290の組み付け、次いで保護装置290を通した切除工具286の軸の挿入によるハンドピース288(およびそれにより保持されるモータ組立体(図示せず))への切除工具286の接続を含む。ケーブル310は、電源284(たとえば、ドリルコンソール)に接続され、電源284とモータ組立体との間の電気接続を確立する。パッチケーブル312は、たとえば中間の患者接続箱314を介して、電源284をエネルギ源286に接続する。いずれの場合でも、電気的連通は、エネルギ源286から保護装置巻線294の第1端296へ、したがって切除工具286までの通路に沿って確立される。その場合、そのように構成されたシステム282は、上述したように動作することができる。
【0038】
図4を参照して上述したように、刺激エネルギは、切除工具24に直接加えられる。本開示の外科切除器具は、切除先端32および工具軸30が共通して導電性金属材料(たとえば、M2鋼)から形成される「標準的な」切除工具構成を組み込むまたは利用することができる。BF(接地浮遊)電源を使用すると、非絶縁切除工具24を有するシステム200の許容可能な動作が促進される。しかし、他の実施形態では、切除工具24は、切除工具24をハンドピース26から電気的に絶縁するように非導電性機構を組み込むように構成可能である。
【0039】
たとえば、図8は、切除器具20(図1)で有用な代替の切除工具330を示す。切除工具330は、切除先端332と、工具軸334と、非導電性絶縁材料336とを含む。全体的な説明では、切除先端332は工具軸344に取り付けられ、絶縁材料336は工具軸334の一部分に適用され、その部分を電気的に絶縁するように機能する。工具軸334は、末端区分338と、中間区分340と、基端344において終わる基端区分342とを画定する。末端区分338は、切除先端332に取り付けられるか、またはその他の方法でこれを形成する。1つの参考として、切除先端332は上述された形態のいずれかを取ることが可能であり、たとえばバー型の切除先端である。いずれの場合でも、基端区分342は、モータ組立体28(図3)に関連する駆動部材158(図3)に取り付けられるように構成される。したがって、たとえば、基端区分342は、駆動部材158の対応する機構と着脱自在に接続するようなサイズおよび形状を有する係合機構346を形成することができる。係合機構346は、具体的に示される形状と異なる他のさまざまな形状を取ることが可能である。
【0040】
絶縁材料336は、基端区分342および中間区分340の一部分に沿って工具軸334の外面上に適用される。この点に関して、絶縁材料336は、基端344を取り巻くまたは覆う。絶縁材料336の長さまたは(すなわち、工具軸334の長手方向の長さに対する)範囲は、切除器具20のさまざまな機構により選択される。たとえば、および図3を参照すると、ハンドピース26への保護装置22の組み付け時の駆動部材158と第1のワイヤ端104の長手方向の距離が分かる。したがって、工具軸30の長さに対する(したがって、工具軸334に対する)接触領域170の位置も分かる。その場合、これを考慮すると、絶縁材料336は、接触領域170(図8で全体的に示される)より基端側にある端348において終わる。その場合、この構造によれば、ハンドピース26への切除工具330の組み付け時、接触領域170は、第1のワイヤ端104との所望の電気結合を確立するために電気的に「露出」される。
【0041】
絶縁材料336は、さまざまな形態を取ることが可能であり、さまざまな方法で工具軸334に適用可能である。いくつかの構成では、絶縁材料336は、工具軸334上へ熱収縮させた非導電性ポリエステル材料(たとえば、管)である。
【0042】
外科器具20(図1)で有用な別の切除工具350が図9に示されている。切除工具350は、切除先端352と、工具軸354と、非導電性絶縁材料356と、スペーサ358と、連結部材360とを含む。工具軸354は切除先端352を維持し、絶縁材料356は工具軸354の一部分の上に適用される。連結部材360は、絶縁材料356の領域で工具軸354上に組み付けられる。最終的に、スペーサ358は、工具軸354と連結部材360との間の電気絶縁を維持する。
【0043】
工具軸354は、末端区分362と、中間区分364と、基端368において終わる基端区分366とを画定する。切除先端352は、末端区分362に取り付けられるか、またはこれによって形成される。上述の構成と同様に、切除先端352および工具軸354は、M2鋼などの硬化された導電性材料から形成される。工具軸354の長さに対して、中間区分364は肩369を形成する。肩369は、基端区分366から末端区分362にかけて工具軸354の直径が増加したことを表す。上述された構成と相応して、肩369は、接触領域170より基端側に設置される。すなわち、肩369は、ハンドピース26(図3)への組み付け時に第1のワイヤ端104(図3)が工具軸354に接触する位置より基端側となるように形成される。
【0044】
絶縁材料356は、工具軸354の外面上に適用され、基端区分366の全体および中間区分364の一部分に沿って肩369まで延びる。絶縁材料356はさまざまな形態を取ることが可能であり、いくつかの構成では、ポリエステルフィルムまたは工具軸354上に熱収縮させた(たとえば、管形状の)材料である。スペーサ358は、非導電性材料(たとえばプラスチック)から形成され、工具軸354上に組み付けられるように構成される。たとえば、いくつかの実施形態では、スペーサ358はリングである。これらの構成によれば、リングの内径は、肩369より基端側での工具軸354の直径に相応する。したがって、スペーサ358は、スペーサ358を基端368から肩369との接触点まで摺動させることによって、工具軸354上に同軸状に組み付けられることができる。さらに、スペーサ358は、肩369より末端側での工具軸354の外径に相応する外径または厚さを有する。
【0045】
連結部材360は、高速度回転中に駆動部材158(図3)との接続を維持するのに適切な比較的剛性の材料から形成される。この点に関して、連結部材360の基端領域370は、駆動部材158の対応する機構と着脱自在に結合するように適合された係合機構372を形成するか、またはこれを含む。いくつかの構成によれば、連結部材360はステンレス鋼管であるが、他の構造も考えられる。管として提供される場合、連結部材360の内径は、肩369より基端側での工具軸354の直径に相応するが、連結部材360の外径は、肩369より末端側での工具軸354の直径に相応する。
【0046】
切除工具350の組み付けは、図示のように工具軸354の提供または形成を含むことができる。絶縁材料356は、基端区分366および中間区分364の一部分の上に肩369まで適用される(たとえば、工具軸354上に熱収縮される)。次に、スペーサ358および連結部材360が工具軸354上に装着される。次に、切除工具350が加熱され、絶縁材料356を溶融させる。冷却時に、絶縁材料356が再凝固し、工具軸354と連結部材360との間の結合を達成する。いずれの場合でも、連結部材360は、絶縁材料356およびスペーサ358を介して、接触領域170(および肩369より末端側の工具軸354の他のすべての部分)から電気的に絶縁される。この点に関して、切除工具350は堅牢な構成を有し、必要な絶縁耐力を示しながら、高速度回転中の耐久性を維持することが可能である。
【0047】
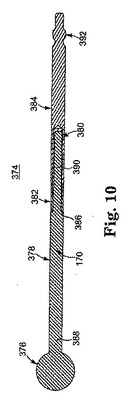
外科切除器具(図1)で有用な切除工具374の別の構成が図10に示されている。切除工具374は、切除先端376と、工具軸378と、誘電体層380と、スペーサ382と、連結部材384とを含む。工具軸378は、上述された工具軸354(図9)と類似しており、その末端区分388と基端区分390との中間に肩386を形成する。この場合も、肩386は、基端区分390から末端区分388にかけて工具軸378の直径が増加したことを反映しており、(全体的に示される)接触領域170より基端側に置かれる。スペーサ382は、非導電性材料から形成され、肩386に接し、これから基端方向に延びるように工具軸378上に組み付けられる。連結部材384も、工具軸378の基端区分390上に組み付けられ、たとえば係合機構392を介して、駆動部材158(図3)に着脱自在に接続されるように構成される。さらに、連結部材384は、高速度回転中にその完全性を維持することが可能な、ステンレス鋼などの硬化された材料から形成される。最終的に、連結部材384は、誘電体層380を介して工具軸378に付着される。より具体的には、誘電体層380は、連結部材384を工具軸378に接合する際に接着性を示す。さらに、スペーサ382と共に誘電体層336は、連結部材384を工具軸378から電気的に絶縁する。
【0048】
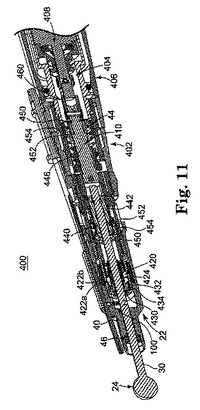
切除工具330(図8)、350(図9)、および374は最終組み立て時にハンドピース26(図3)に対して電気絶縁を提供すると説明してきたが、他の実施形態では、切除工具は非導電性機構がない従来の構成を有することができる。これらの構成によれば、1つまたは複数の他の機構をハンドピース26に組み込んで切除工具からの電気絶縁を促進すると有用な場合がある。たとえば、本開示のいくつかの態様による外科切除器具400が図11に示されている。器具400は、上述された保護装置22と(非絶縁形の)切除工具24とを含む。さらに、器具400は、モータ組立体404を維持するハンドピース402を含む。ハンドピース402は、以下に説明する他の構成要素と共に外部筐体406を含む。モータ組立体404は、駆動部材410に接続されたモータ408を全体として含む。切除工具24および駆動部材410は、適切な係合機構を介してそれらの間に着脱自在な結合を達成するように構成される。以下に説明されるように、ハンドピース402は、(その他の方法でワイヤ100により通電されるとき)切除工具24を外部筐体406から電気的に絶縁するように構成される。
【0049】
たとえば、いくつかの構成では、ハンドピース402は、たとえば1つまたは複数の軸受組立体422a、422bとスリーブ424とからなる軸受組立体構造420を含む。軸受組立体422a、422bは、導電性または非導電性の材料から形成されるさまざまな形態(たとえば、転がり軸受組立体)を取ることが可能である。いずれの場合でも、軸受組立体422a、422bは、ハンドピース402への組み付け時に工具軸30をその他の方法で摩擦受入れして支持するスリーブ424を回転自在に維持する。この点に関して、スリーブ424は、セラミックなどの耐久性がある非導電性材料から形成される。駆動部材410も、セラミックなどの耐久性がある非導電性材料から形成される。
【0050】
上記の構成によれば、ハンドピース402への切除工具24の組み付け時に、工具軸30は、駆動部材410およびスリーブ424のみと直接接触する。さらに、切除工具24はまた、任意選択の軸受部材46など、保護装置22の1つまたは複数の機構とも物理的に直接接触してもよい。このような状況下では、器具400は、非絶縁切除工具24を外部筐体406から電気的に絶縁する。より具体的には、駆動部材410およびスリーブ424は非導電性材料から形成され、したがって電気エネルギが駆動部材410またはスリーブ424を介してハンドピース402の他の構成要素に伝播されない。さらに、保護装置筐体40は非導電性材料から形成され、したがって電気エネルギは保護装置筐体40とハンドピース402との間の接続領域または接触領域に伝播されない。そのため、使用中、電気刺激エネルギは、ユーザが外部筐体406を握っている間にワイヤ100を介して工具軸30に安全に加えられることができる。
【0051】
あるいは、またはさらに、ハンドピース402の他の構成要素は、切除工具24からの外部筐体406の電気絶縁を達成するように構成可能である。たとえば、上述したように、軸受組立体構造420は、軸受組立体422a、422bを含むことができる。より具体的には、いくつかの構成では軸受組立体422a、422bはそれぞれ、内輪430と、外輪432と、それらの間に捕捉される複数の転がり軸受434とからなる。輪430、432は、任意の所望の材料から形成されることが可能であり、この材料は導電性であってもなくてもよい。しかし、球434は、セラミックなど、硬化された非導電性材料から形成される。軸受組立体構造420に加えて、ハンドピース402は、切除工具24/駆動部材410接続部を回転自在に支持するために駆動部材410の末端442に隣接して設置される中間軸受組立体440をさらに含むことができる。さらに、基端軸受組立体444は、駆動部材410/モータ408接続部を支持するために駆動部材410の基端446に隣接して設けることができる。軸受組立体440、444は、上述された軸受組立体422a、422bに類似しており、それぞれ内輪450と、外輪452と、それらの間に捕捉された複数の転がり軸受454とを含む。この場合も、輪450、452は、導電性または非導電性の任意の所望の材料から形成されることができる。しかし、転がり軸受454は、セラミックなど、硬化された非導電性材料から形成される。特に、ハンドピース402は軸受組立体422a、422b、440、444を外部から支持する追加の機構または構成要素を含むが、これらの構造は切除工具24または駆動部材410と物理的に直接接触しない。すなわち、保護装置22を除いて、外部筐体406と切除工具24との間の電気経路と、外部筐体406と駆動部材410との間の電気経路のみが、軸受組立体422a、422b、440、444を含む。対応する転がり軸受434、454の非導電性により、電気エネルギはこれらの通路を介して伝播されない。
【0052】
最終的に、駆動部材410をモータ408に接続する連結460が提供される。この構造によれば、連結器460または駆動部材410の少なくとも一方は、セラミックなどの非導電性材料から形成され、それによりモータ408を工具軸30から絶縁する。
【0053】
非導電性転がり軸受434、454は、非絶縁切除工具24を外部筐体406から電気的に絶縁する。さらに、非導電性筐体40は、保護装置22を外部筐体406から電気的に絶縁する。最終的に、非導電性の連結器460および/または駆動部材410は、非絶縁切除工具24をモータ408から電気的に絶縁する。その場合、この構造によれば、切除工具24は、外部筐体406およびモータ408から電気的に絶縁される。
【0054】
本明細書において特定の実施形態を図示し説明してきたが、本開示の精神および範囲から逸脱することなく、図示し説明された特定の実施形態の代わりにさまざまな代替的/等価的な移し替え(implantation)を実施できることが、当業者には理解されよう。本出願は、本明細書において説明した特定の実施形態の任意の適用または変更を包含することを意図するものである。したがって、本開示は特許請求の範囲およびその等価物によってのみ限定されることを意図するものである。
【特許請求の範囲】
【請求項1】
外科切除器具と共に使用する着脱自在な保護装置であって、
前端と後端とそれらの間に延びる長手方向の通路とを画定する筐体であって、当該通路が外科切除器具ハンドピースを着脱自在に受けるサイズを有する後端開口で開き、切除工具軸を着脱自在に受けるサイズを有する前端開口で開いている、筐体と、
前記筐体に結合された巻線と
を備え、
前記巻線が、
対向する第1端と第2端を画定する導電性ワイヤであって、当該第1端が前記通路内に設置される、ワイヤと、
前記ワイヤの前記第1端が、前記通路内に配設される切除工具軸と電気接続を確立するために当該通路内に露出されるように、当該第1端を除く当該ワイヤの少なくとも大部分を覆う非導電性絶縁材料と
を備える、保護装置。
【請求項2】
請求項1に記載の保護装置において、
前記ワイヤの前記第1端が複数のワイヤ素線を含む、保護装置。
【請求項3】
請求項2に記載の保護装置において、
前記複数のワイヤ素線がワイヤブラシを形成する、保護装置。
【請求項4】
請求項1に記載の保護装置において、
前記ワイヤが炭素繊維ワイヤである、保護装置。
【請求項5】
請求項1に記載の保護装置において、
前記通路が、中心軸と最小半径とを画定し、
さらに前記ワイヤが、前記第1端が前記中心軸に向かって突出し前記最小半径内のある点で終わるように設置される、保護装置。
【請求項6】
請求項5に記載の保護装置において、
前記最小半径が切除工具軸の半径に相応する、保護装置。
【請求項7】
請求項1に記載の保護装置において、
前記筐体が当該筐体の外面と前記通路との間に延びる窓孔を形成し、
さらに前記巻線が前記窓孔を貫通する、保護装置。
【請求項8】
請求項7に記載の保護装置において、
前記筐体の前記外面に取り付けられた蓋をさらに備え、
前記巻線のある区分が前記蓋と前記筐体との間に囲まれる、保護装置。
【請求項9】
請求項1に記載の保護装置において、
前記巻線が、前記第1端から延びる第1区分と、前記第2端から延びる第2区分とを含み、
さらに前記第1区分が前記筐体に付着され、
前記第2区分が前記筐体に対して移動可能である、保護装置。
【請求項10】
請求項1に記載の保護装置において、
前記筐体が非導電性材料から形成される、保護装置。
【請求項11】
請求項1に記載の保護装置において、
前記筐体が、前記後端開口を画定するように結合し器具ハンドピースと着脱自在に係合するように構成された複数の偏向可能な指部を形成する、保護装置。
【請求項12】
請求項1に記載の保護装置において、
切除工具軸を回転自在に支持するために前記前端開口に隣接する前記通路内に配設された軸受部材をさらに備える、保護装置。
【請求項13】
請求項1に記載の保護装置において、
前記軸受部材のある領域で前記筐体の外面に組み付けられるカラーをさらに備える、保護装置。
【請求項14】
請求項13に記載の保護装置において、
前記筐体が、前記前端から延びる前区分と、前記後端から延びる後区分とを画定し、前記前区分が、前記後区分の直径より小さい直径を有し、
さらに前記カラーが前記前区分に組み付けられる、保護装置。
【請求項15】
請求項1に記載の保護装置において、
前記筐体に結合された洗浄管をさらに備える、保護装置。
【請求項16】
請求項15に記載の保護装置において、
前記洗浄管が末端と基端とを画定し、
さらに前記末端が、前記筐体の前記前端より末端側に設置される、保護装置。
【請求項17】
切除先端と当該切除先端から基端方向に延びる工具軸とを含む切除工具と、
駆動機構を回転自在に駆動するモータを含むモータ組立体と、
前記モータ組立体に結合され、自らが画定する孔内での前記工具軸と前記駆動機構との選択的な接続を容易にするように構成されたハンドピースと、
保護装置と
を備える外科切除システムであって、
前記保護装置が、
前端と後端とそれらの間に延びる長手方向の通路とを画定する筐体であって、当該後端が当該通路の後端開口を介して前記ハンドピースに着脱自在に取り付けられるように構成され、さらに当該前端が前端開口を介して当該通路内での前記工具軸の選択的配置を可能にするように構成された、筐体と、
前記筐体に結合された巻線と
を備え、
前記巻線が、
対向する第1端と第2端を画定する導電性ワイヤであって、当該第1端が前記通路内に設置される、ワイヤと、
前記第1端が前記通路内に露出されるように、当該第1端を除く前記ワイヤの少なくとも大部分を取り巻く非導電性絶縁材料と
を備え、
最終組み立て時に、前記ハンドピースが前記通路内に配設され、前記工具軸が当該通路を貫通し前記駆動機構に接続され、前記ワイヤの前記第1端が当該工具軸に接触する、外科切除システム。
【請求項18】
請求項17に記載のシステムにおいて、
前記ワイヤおよび当該ワイヤの前記第1端と前記工具軸との間の前記接触を介して刺激エネルギを前記切除先端に加えるために、当該ワイヤの前記第2端に選択的に電気的に結合されるエネルギ源を有する誘発電位モニタリングシステムをさらに備える、システム。
【請求項19】
請求項17に記載のシステムにおいて、
前記保護装置は、最終組み立て時に前記ワイヤの前記第1端と前記工具軸との間の連続的接触がモータ組立体による当該工具軸の回転によって維持されるように構成された、システム。
【請求項20】
請求項17に記載のシステムにおいて、
前記保護装置は、最終組み立て時に前記ワイヤの前記第1端が前記ハンドピースより末端側で前記工具軸に接触するように構成された、システム。
【請求項21】
請求項17に記載のシステムにおいて、
前記ワイヤの前記第1端が複数のワイヤ素線を含む、システム。
【請求項22】
請求項21に記載のシステムにおいて、
前記複数のワイヤ素線がワイヤブラシを形成する、システム。
【請求項23】
請求項17に記載のシステムにおいて、
前記ワイヤが炭素繊維ワイヤである、システム。
【請求項24】
請求項17に記載のシステムであって、
前記筐体が非導電性材料から形成される、システム。
【請求項25】
請求項17に記載のシステムにおいて、
前記筐体が、前記通路を介して前記工具軸の挿入および取り外しを可能にするように構成され、
さらに前記保護装置は、前記通路を通過しての前記工具軸の挿入により前記ワイヤの前記第1端が当該工具軸に接触するように構成された、システム。
【請求項26】
請求項17に記載のシステムにおいて、
前記保護装置が、前記切除工具軸を回転自在に支持するために前記前端開口に隣接する前記通路内に配設された軸受部材をさらに備える、システム。
【請求項27】
請求項26に記載のシステムにおいて、
前記保護装置が、前記前端に隣接する前記筐体の外面に組み付けられ、前記工具軸と前記軸受部材との間の接続部を支持するように適合されたカラーをさらに備える、システム。
【請求項28】
請求項17に記載のシステムにおいて、
前記保護装置が、前記前端に隣接する前記通路内に組み付けられたシール部材をさらに備え、
前記シール部材は、前記工具軸を選択的に受けるサイズを有する窓孔を画定し、
前記シール部材は、最終組み立て時に前記工具軸に対する液密シールを確立する、システム。
【請求項29】
請求項17に記載のシステムにおいて、
前記工具軸が基端区分を画定し、
前記切除工具が、
前記基端区分の外面上に適用された非導電性材料と、
前記駆動機構に接続するように構成され、前記非導電性材料上に組み付けられたコネクタ片と
をさらに備える、システム。
【請求項30】
請求項29に記載のシステムにおいて、
前記工具軸が、前記基端区分から末端方向に延びる中間区分であって、当該基端区分の直径より大きい直径を有する肩を形成する中間区分をさらに画定し、
さらに前記コネクタ片が、前記肩より基端側の端において終わり、
前記切除工具が、前記工具軸上で前記コネクタ片の前記端と前記肩との間に組み付けられた非導電性スペーサをさらに備える、システム。
【請求項31】
請求項17に記載のシステムにおいて、
前記ハンドピースが、
ユーザによって握られるように適合された外部筐体と、
最終組み立て時に前記工具軸を支持するように適合された軸受スリーブであって、非導電性材料から形成された軸受スリーブと
を含み、
前記駆動機構が、前記工具軸を受けてこれに接触するように適合されており、非導電性材料から形成され、
さらに、最終組み立て時に、前記軸受スリーブおよび前記駆動機構が、前記外部筐体および前記モータの電気接地を前記工具軸から電気的に絶縁する、システム。
【請求項32】
請求項17に記載のシステムにおいて、
前記ハンドピースが、
ユーザによって握られるように適合された外部筐体と、
最終組み立て時に前記工具軸を回転自在に支持する第1転がり軸受組立体と、
前記駆動機構を回転自在に支持する第2転がり軸受組立体と
を含み、
前記第1及び第2転がり軸受組立体のそれぞれが、内輪と、外輪と、当該内輪と当該外輪との間に移動可能に捕捉された複数の転がり軸受とを含み、
前記転がり軸受が、非導電性材料から形成されて、前記外部筐体および前記モータの電気接地を前記工具軸から電気的に絶縁する、システム。
【請求項33】
外科切除手技を実行する方法であって、
外部筐体を有し中心孔を画定するハンドピースを提供する工程と、
工具軸および切除先端を有する切除工具を提供する工程と、
保護装置を提供する工程であって、当該保護装置が、
前端と後端とそれらの間に延びる長手方向の通路とを画定する筐体であって、当該通路が後端開口および前端開口において開いている、筐体と、
前記筐体に結合された巻線とを含み、当該巻線が、
対向する第1端と第2端を画定する導電性ワイヤであって、当該第1端が前記通路内に設置される、ワイヤと、
前記ワイヤの前記第1端が前記通路内に露出されるように、当該第1端を除く当該ワイヤの少なくとも大部分を覆う非導電性絶縁材料とを含む、工程と、
前記保護装置の前記筐体を前記ハンドピースの前記外部筐体に組み付けて、前記通路が前記孔に開かせる工程と、
前記通路の前記前端開口を通して前記孔に前記工具軸を挿入する工程であって、挿入時に、前記切除先端が前記保護装置より末端側に設置され、前記ワイヤの前記第1端が当該工具軸に接触する、工程と、
前記工具軸を、前記ハンドピースによって維持されるモータ組立体の駆動機構に結合する工程と、
誘発電位モニタリングシステムを前記ワイヤの前記第2端に電気的に接続して、当該誘発電位モニタリングシステムのエネルギ源が前記切除先端と電気的に連通する工程と、
前記切除先端を手術部位に運ぶ工程と、
前記手術部位において前記切除先端を用いて切除動作を実行するように、前記モータ組立体を操作する工程と、
前記エネルギ源を介して前記切除先端に刺激エネルギを加える工程と、
前記刺激エネルギに対する参照に基づいて神経に対する前記切除先端の近接を検出する工程と
を含む、方法。
【請求項34】
請求項33に記載の方法において、
前記保護装置を前記ハンドピースから取り外す工程をさらに含む、方法。
【請求項1】
外科切除器具と共に使用する着脱自在な保護装置であって、
前端と後端とそれらの間に延びる長手方向の通路とを画定する筐体であって、当該通路が外科切除器具ハンドピースを着脱自在に受けるサイズを有する後端開口で開き、切除工具軸を着脱自在に受けるサイズを有する前端開口で開いている、筐体と、
前記筐体に結合された巻線と
を備え、
前記巻線が、
対向する第1端と第2端を画定する導電性ワイヤであって、当該第1端が前記通路内に設置される、ワイヤと、
前記ワイヤの前記第1端が、前記通路内に配設される切除工具軸と電気接続を確立するために当該通路内に露出されるように、当該第1端を除く当該ワイヤの少なくとも大部分を覆う非導電性絶縁材料と
を備える、保護装置。
【請求項2】
請求項1に記載の保護装置において、
前記ワイヤの前記第1端が複数のワイヤ素線を含む、保護装置。
【請求項3】
請求項2に記載の保護装置において、
前記複数のワイヤ素線がワイヤブラシを形成する、保護装置。
【請求項4】
請求項1に記載の保護装置において、
前記ワイヤが炭素繊維ワイヤである、保護装置。
【請求項5】
請求項1に記載の保護装置において、
前記通路が、中心軸と最小半径とを画定し、
さらに前記ワイヤが、前記第1端が前記中心軸に向かって突出し前記最小半径内のある点で終わるように設置される、保護装置。
【請求項6】
請求項5に記載の保護装置において、
前記最小半径が切除工具軸の半径に相応する、保護装置。
【請求項7】
請求項1に記載の保護装置において、
前記筐体が当該筐体の外面と前記通路との間に延びる窓孔を形成し、
さらに前記巻線が前記窓孔を貫通する、保護装置。
【請求項8】
請求項7に記載の保護装置において、
前記筐体の前記外面に取り付けられた蓋をさらに備え、
前記巻線のある区分が前記蓋と前記筐体との間に囲まれる、保護装置。
【請求項9】
請求項1に記載の保護装置において、
前記巻線が、前記第1端から延びる第1区分と、前記第2端から延びる第2区分とを含み、
さらに前記第1区分が前記筐体に付着され、
前記第2区分が前記筐体に対して移動可能である、保護装置。
【請求項10】
請求項1に記載の保護装置において、
前記筐体が非導電性材料から形成される、保護装置。
【請求項11】
請求項1に記載の保護装置において、
前記筐体が、前記後端開口を画定するように結合し器具ハンドピースと着脱自在に係合するように構成された複数の偏向可能な指部を形成する、保護装置。
【請求項12】
請求項1に記載の保護装置において、
切除工具軸を回転自在に支持するために前記前端開口に隣接する前記通路内に配設された軸受部材をさらに備える、保護装置。
【請求項13】
請求項1に記載の保護装置において、
前記軸受部材のある領域で前記筐体の外面に組み付けられるカラーをさらに備える、保護装置。
【請求項14】
請求項13に記載の保護装置において、
前記筐体が、前記前端から延びる前区分と、前記後端から延びる後区分とを画定し、前記前区分が、前記後区分の直径より小さい直径を有し、
さらに前記カラーが前記前区分に組み付けられる、保護装置。
【請求項15】
請求項1に記載の保護装置において、
前記筐体に結合された洗浄管をさらに備える、保護装置。
【請求項16】
請求項15に記載の保護装置において、
前記洗浄管が末端と基端とを画定し、
さらに前記末端が、前記筐体の前記前端より末端側に設置される、保護装置。
【請求項17】
切除先端と当該切除先端から基端方向に延びる工具軸とを含む切除工具と、
駆動機構を回転自在に駆動するモータを含むモータ組立体と、
前記モータ組立体に結合され、自らが画定する孔内での前記工具軸と前記駆動機構との選択的な接続を容易にするように構成されたハンドピースと、
保護装置と
を備える外科切除システムであって、
前記保護装置が、
前端と後端とそれらの間に延びる長手方向の通路とを画定する筐体であって、当該後端が当該通路の後端開口を介して前記ハンドピースに着脱自在に取り付けられるように構成され、さらに当該前端が前端開口を介して当該通路内での前記工具軸の選択的配置を可能にするように構成された、筐体と、
前記筐体に結合された巻線と
を備え、
前記巻線が、
対向する第1端と第2端を画定する導電性ワイヤであって、当該第1端が前記通路内に設置される、ワイヤと、
前記第1端が前記通路内に露出されるように、当該第1端を除く前記ワイヤの少なくとも大部分を取り巻く非導電性絶縁材料と
を備え、
最終組み立て時に、前記ハンドピースが前記通路内に配設され、前記工具軸が当該通路を貫通し前記駆動機構に接続され、前記ワイヤの前記第1端が当該工具軸に接触する、外科切除システム。
【請求項18】
請求項17に記載のシステムにおいて、
前記ワイヤおよび当該ワイヤの前記第1端と前記工具軸との間の前記接触を介して刺激エネルギを前記切除先端に加えるために、当該ワイヤの前記第2端に選択的に電気的に結合されるエネルギ源を有する誘発電位モニタリングシステムをさらに備える、システム。
【請求項19】
請求項17に記載のシステムにおいて、
前記保護装置は、最終組み立て時に前記ワイヤの前記第1端と前記工具軸との間の連続的接触がモータ組立体による当該工具軸の回転によって維持されるように構成された、システム。
【請求項20】
請求項17に記載のシステムにおいて、
前記保護装置は、最終組み立て時に前記ワイヤの前記第1端が前記ハンドピースより末端側で前記工具軸に接触するように構成された、システム。
【請求項21】
請求項17に記載のシステムにおいて、
前記ワイヤの前記第1端が複数のワイヤ素線を含む、システム。
【請求項22】
請求項21に記載のシステムにおいて、
前記複数のワイヤ素線がワイヤブラシを形成する、システム。
【請求項23】
請求項17に記載のシステムにおいて、
前記ワイヤが炭素繊維ワイヤである、システム。
【請求項24】
請求項17に記載のシステムであって、
前記筐体が非導電性材料から形成される、システム。
【請求項25】
請求項17に記載のシステムにおいて、
前記筐体が、前記通路を介して前記工具軸の挿入および取り外しを可能にするように構成され、
さらに前記保護装置は、前記通路を通過しての前記工具軸の挿入により前記ワイヤの前記第1端が当該工具軸に接触するように構成された、システム。
【請求項26】
請求項17に記載のシステムにおいて、
前記保護装置が、前記切除工具軸を回転自在に支持するために前記前端開口に隣接する前記通路内に配設された軸受部材をさらに備える、システム。
【請求項27】
請求項26に記載のシステムにおいて、
前記保護装置が、前記前端に隣接する前記筐体の外面に組み付けられ、前記工具軸と前記軸受部材との間の接続部を支持するように適合されたカラーをさらに備える、システム。
【請求項28】
請求項17に記載のシステムにおいて、
前記保護装置が、前記前端に隣接する前記通路内に組み付けられたシール部材をさらに備え、
前記シール部材は、前記工具軸を選択的に受けるサイズを有する窓孔を画定し、
前記シール部材は、最終組み立て時に前記工具軸に対する液密シールを確立する、システム。
【請求項29】
請求項17に記載のシステムにおいて、
前記工具軸が基端区分を画定し、
前記切除工具が、
前記基端区分の外面上に適用された非導電性材料と、
前記駆動機構に接続するように構成され、前記非導電性材料上に組み付けられたコネクタ片と
をさらに備える、システム。
【請求項30】
請求項29に記載のシステムにおいて、
前記工具軸が、前記基端区分から末端方向に延びる中間区分であって、当該基端区分の直径より大きい直径を有する肩を形成する中間区分をさらに画定し、
さらに前記コネクタ片が、前記肩より基端側の端において終わり、
前記切除工具が、前記工具軸上で前記コネクタ片の前記端と前記肩との間に組み付けられた非導電性スペーサをさらに備える、システム。
【請求項31】
請求項17に記載のシステムにおいて、
前記ハンドピースが、
ユーザによって握られるように適合された外部筐体と、
最終組み立て時に前記工具軸を支持するように適合された軸受スリーブであって、非導電性材料から形成された軸受スリーブと
を含み、
前記駆動機構が、前記工具軸を受けてこれに接触するように適合されており、非導電性材料から形成され、
さらに、最終組み立て時に、前記軸受スリーブおよび前記駆動機構が、前記外部筐体および前記モータの電気接地を前記工具軸から電気的に絶縁する、システム。
【請求項32】
請求項17に記載のシステムにおいて、
前記ハンドピースが、
ユーザによって握られるように適合された外部筐体と、
最終組み立て時に前記工具軸を回転自在に支持する第1転がり軸受組立体と、
前記駆動機構を回転自在に支持する第2転がり軸受組立体と
を含み、
前記第1及び第2転がり軸受組立体のそれぞれが、内輪と、外輪と、当該内輪と当該外輪との間に移動可能に捕捉された複数の転がり軸受とを含み、
前記転がり軸受が、非導電性材料から形成されて、前記外部筐体および前記モータの電気接地を前記工具軸から電気的に絶縁する、システム。
【請求項33】
外科切除手技を実行する方法であって、
外部筐体を有し中心孔を画定するハンドピースを提供する工程と、
工具軸および切除先端を有する切除工具を提供する工程と、
保護装置を提供する工程であって、当該保護装置が、
前端と後端とそれらの間に延びる長手方向の通路とを画定する筐体であって、当該通路が後端開口および前端開口において開いている、筐体と、
前記筐体に結合された巻線とを含み、当該巻線が、
対向する第1端と第2端を画定する導電性ワイヤであって、当該第1端が前記通路内に設置される、ワイヤと、
前記ワイヤの前記第1端が前記通路内に露出されるように、当該第1端を除く当該ワイヤの少なくとも大部分を覆う非導電性絶縁材料とを含む、工程と、
前記保護装置の前記筐体を前記ハンドピースの前記外部筐体に組み付けて、前記通路が前記孔に開かせる工程と、
前記通路の前記前端開口を通して前記孔に前記工具軸を挿入する工程であって、挿入時に、前記切除先端が前記保護装置より末端側に設置され、前記ワイヤの前記第1端が当該工具軸に接触する、工程と、
前記工具軸を、前記ハンドピースによって維持されるモータ組立体の駆動機構に結合する工程と、
誘発電位モニタリングシステムを前記ワイヤの前記第2端に電気的に接続して、当該誘発電位モニタリングシステムのエネルギ源が前記切除先端と電気的に連通する工程と、
前記切除先端を手術部位に運ぶ工程と、
前記手術部位において前記切除先端を用いて切除動作を実行するように、前記モータ組立体を操作する工程と、
前記エネルギ源を介して前記切除先端に刺激エネルギを加える工程と、
前記刺激エネルギに対する参照に基づいて神経に対する前記切除先端の近接を検出する工程と
を含む、方法。
【請求項34】
請求項33に記載の方法において、
前記保護装置を前記ハンドピースから取り外す工程をさらに含む、方法。
【図1】


【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公表番号】特表2010−528775(P2010−528775A)
【公表日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願番号】特願2010−511302(P2010−511302)
【出願日】平成20年6月4日(2008.6.4)
【国際出願番号】PCT/US2008/065802
【国際公開番号】WO2008/154256
【国際公開日】平成20年12月18日(2008.12.18)
【出願人】(504101304)メドトロニック・ゾーメド・インコーポレーテッド (28)
【Fターム(参考)】
【公表日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願日】平成20年6月4日(2008.6.4)
【国際出願番号】PCT/US2008/065802
【国際公開番号】WO2008/154256
【国際公開日】平成20年12月18日(2008.12.18)
【出願人】(504101304)メドトロニック・ゾーメド・インコーポレーテッド (28)
【Fターム(参考)】
[ Back to top ]