
外科手術ステープリング装置
【課題】ファスナー配備および形成圧力を組み込む改善された外科手術ステープリングを提供すること。
【解決手段】外科手術ステープリング装置が提供され、ハウジングと、細長い部材と、エンドエフェクタと、第一の区分および第二の区分の各々に対する付勢部材と、第一の区分および第二の区分の各々に対する圧力センサーとを含む。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の端部上に配置される。エンドエフェクタは、第一のジョーおよび第二のジョーを有する。
【解決手段】外科手術ステープリング装置が提供され、ハウジングと、細長い部材と、エンドエフェクタと、第一の区分および第二の区分の各々に対する付勢部材と、第一の区分および第二の区分の各々に対する圧力センサーとを含む。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の端部上に配置される。エンドエフェクタは、第一のジョーおよび第二のジョーを有する。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の相互参照)
本願は、2009年8月11日に出願された米国仮特許出願第61/232,826号の利益および優先権を主張する、2010年6月8日に出願された米国特許出願第12/796,270号の利益および優先権を主張する、2011年2月1日に出願された米国特許出願第13/018,467号の利益および優先権を主張する一部継続出願である。それらの各々の全内容は、本明細書において参照することによって援用される。
【0002】
(背景)
(1.技術分野)
本開示は、ファスナーのラインを組織に適用し、それらファスナーのラインの間の組織を切断する能力を有する外科手術ステープリング装置に関する。より具体的には、ファスナー配備および形成に関する改善に関する。
【背景技術】
【0003】
(2.関連技術の背景)
内視鏡および腹腔鏡外科手術装置は、しばしば伝統的な開放外科手術デバイスよりも好まれる。なぜなら、より小さい切開は、術後回復時間および合併症を減少させる傾向があるからである。腹腔鏡および内視鏡外科手術処置の使用は、比較的人気があり、処置をより発展させるさらなる動機を提供してきた。腹腔鏡処置において、外科手術は、小さな切開を通して腹の内部において実行される。同様に、内視鏡処置において、外科手術は、皮膚における小さい入口創傷を通して挿入された細い内視鏡管によって身体の任意の空洞な内臓において実行される。
【0004】
腹腔鏡および内視鏡処置は、外科手術領域にガス注入することを一般的に要求する。そのため、身体内へ挿入された任意の器具類は、切開を通してガスが身体に流入しないか、または流出しないことを確実にするために、密閉されなければならない。さらに、腹腔鏡および内視鏡処置は、しばしば外科医に切開から遠く離れた器官、組織および/または血管にアクセスすることを要求する。したがって、そのような処置において用いられる装置は、一般的に長く、細く、装置の近位端部から機能的に制御可能である。
【0005】
重要な発展は、トロカールのカニューレを通して、遠位エンドエフェクタを所望の外科手術部位に正確に設置するために適切である内視鏡外科手術装置の範囲にたどり着いている。これらの遠位エンドエフェクタは、組織を数多くの方法によって係合し、診断または治療効果(例えば、エンドカッター、把持器、カッター、ステープラー、クリップアプライヤー、アクセスデバイス、薬物/遺伝子療法送達デバイスおよび超音波、RF、レーザーなどを用いたエネルギーデバイス)を達成する。
【0006】
公知の外科手術ステープリング装置は、組織に長手方向切開を作り、続いてファスナーのラインを切開の対向する側面上に適用するエンドエフェクタを含む。エンドエフェクタは、一対の協働ジョーを含み、装置が内視鏡または腹腔鏡用途として意図された場合、ジョーは、カニューレ通路を通過する能力を有する。ジョーのうちの1つは、側方に一定の距離を置かれた少なくとも2つのファスナーの列を有するファスナーカートリッジを受容する。他のジョーは、カートリッジにおけるファスナーの列と一列に並べられたファスナー形成ポケットを有するアンビルを形成する。装置は、複数のレシプロウェッジまたはカムバーを含み、それらは、遠位へ駆動された場合、ファスナーカートリッジにおける開口部を通過し、ファスナーを支持するドライバーを係合することによってアンビルへのファスナーの発射をもたらす。
【0007】
さまざまなタイプの小さなビデオスコープ(例えば、内視鏡)は、外科手術ステープリング装置の適切な位置決めおよび動作を監視するために利用され得る。ある程度効果的であるが、外科手術ステープリング装置の動作を監視することを改善したことは望ましい。複数のファスナーを各カートリッジ装填に含むステープリングデバイスを利用した場合、どのファスナーが配備されているか、それらは、適切に形成されているか否かを決定することも有益である。
【発明の概要】
【発明が解決しようとする課題】
【0008】
結果として、外科手術ステープリングデバイスの機械的および止血の完全性を確実にするために、能力を監視しつつ、ファスナー配備および形成圧力を組み込む改善された外科手術ステープリングおよび切断装置に対する継続した必要性が存在する。
【課題を解決するための手段】
【0009】
(概要)
本開示に従って、外科手術ステープリング装置が開示される。外科手術ステープリング装置は、ハウジングと、細長い部材と、エンドエフェクタと、複数のファスナーと、複数の推進器部材と、作動機構と、圧力応答要素とを有する。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の1つの端部上に配置される。エンドエフェクタは、第一および第二のジョーを含む。複数のファスナーは、エンドエフェクタに配置される。複数の推進器部材は、エンドエフェクタに設けられる。複数の推進器部材における各推進器部材は、数多くのファスナーに動作可能に連結される。作動機構は、アクチュエータに動作可能に連結される。作動機構は、長手方向に並進可能な駆動部材および駆動部材に連結された作動スレッドを含む。作動スレッドは、複数の推進器部材を係合するように構成されている。圧力応答要素は、ジョーのうちの1つに配置される。圧力応答要素は、信号を外科手術ステープリング装置に連結されたコントローラーに通信する。信号は、圧力応答要素に印加された圧力を表す。
【0010】
一実施形態において、作動スレッドと推進器部材との間の相互作用は、圧力を圧力応答要素に印加する。圧力応答要素は、ずらされた圧力センサーを回路において含む。回路は、いくつかの発現形態において、ジョーのうちの1つに位置決めされたチャネルの表面上に配置されたプリント圧力回路または可撓性回路である。
【0011】
別の実施形態において、外科手術ステープリング装置は、ジョーのうちの少なくとも1つの外側表面上に配置される回路を含み得る。この型において、ステープリング装置は、また、ビームを含む。ビームは、ジョーのうちの少なくとも1つの外側表面上に配置され、ジョーのうちの少なくとも1つ内に配置された溝に据え付けられ、ビームは、溝に沿って並進するように構成され得る。ビームは、IビームまたはEビームであり得る。
【0012】
回路は、ラミネート層を回路上に有し得、ラミネート層上に潤滑なコーティングをも有し得る。コントローラーに通信された信号は、コントローラーによって不規則として読まれることがある。そのような場合、コントローラーは、エラーコード、警告のようなフィードバック応答を作動させるか、またはコントローラーは、ファスナー配備を完全に停止をもさせ得る。圧力応答要素は、信号を、電圧、抵抗、インピーダンス、電磁気、高周波、電流、インダクタンス、静電容量、赤外線、光学のうちのいずれか、またはそれらの任意の組み合わせによってコントローラーに通信することが予期される。
【0013】
別の実施形態は、ジョーを通り並進するように構成されることによって、組織を切断するナイフを予想する。しかし、ある所定の不規則の際、それらの不規則がそれらの所定のコンディションに一致する場合、コントローラーは、ナイフが切断することを妨げ得る。エンコーダは、印加された圧力に対して不規則な構成要素位置を認識することと、信号をコントローラーに送ることとを行うように構成されている。エンコーダは、作動機構、ナイフ、アクチュエータ、作動スレッド、推進器部材、第一のジョー、第二のジョーまたはそれらのさまざまな組み合わせをも含むさまざまな構成要素の不規則な位置を認識するように構成され得る。これらのエンコーダは、線形であり得るか、または回転し得る。
【0014】
ある実施形態は、カートリッジ識別特徴を含む回路を予期する。他の実施形態は、特定の装填またはファスナータイプに対して位置限定およびランモードを設定するように構成されているコントローラーを有し得る。さらに、ジョーのうちの1つは、非線形カートリッジを収納するような構成および寸法とされ得る。
【0015】
他の実施形態において、コントローラーは、エンドユーザーフィードバック通信特徴を含む。エンドユーザーフィードバック通信特徴は、フィードバックをエンドユーザーに、聴覚、視覚、触覚またはそれらの任意の組み合わせのような知覚信号によって通信するように構成されている。
【0016】
本開示の別の局面に従って、外科手術ステープリング装置が提供され、ハウジングと、細長い部材と、エンドエフェクタと、第一の区分および第二の区分の各々に対する付勢部材と、第一の区分および第二の区分の各々に対する圧力センサーとを含む。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の端部上に配置される。エンドエフェクタは、第一のジョーおよび第二のジョーを有する。第一のジョーは、ステープルカートリッジを有する。第二のジョーは、複数のステープル形成くぼみを有する。ステープルカートリッジは、少なくとも第一の区分および第二の区分を有する。第一の区分および第二の区分は、各々、組織接触表面およびステープル受容スロットを有する。ステープル受容スロットは、組織接触表面に規定される。第一の区分および第二の区分は、第二のジョーの方へ付勢されており、可動である。
【0017】
外科手術ステープリング装置は、いつ圧力が閾値の上にあるかを決定する構成要素をさらに含み得る。
【0018】
外科手術ステープリング装置は、アクチュエータに動作可能に接続されたモーターをさらに含み得る。モーターは、ハウジングにあり得る。
【0019】
外科手術ステープリング装置は、電源をハウジングにおいてさらに含み得、電源は、モーターに動作可能に接続される。
【0020】
構成要素は、モーターを停止するようにプログラムされ得る。
【0021】
ステープル形成くぼみおよびステープル受容スロットは、線形な列を規定し得る。線形な列は、細長い部材の長手方向軸に対して横切って延び得る。ステープル形成くぼみおよびステープル受容スロットは、エンドエフェクタの長手方向軸に対して角度を規定し得る。
【0022】
本開示のさらなる局面に従って、外科手術装置に選択的に接続するエンドエフェクタが提供され、第一のジョーと、ステープルカートリッジと、第二のジョーと、圧力感知要素とを含む。ステープルカートリッジは、第一のジョー上で支持される。ステープルカートリッジは、組織接触表面を規定する。ステープルカートリッジは、複数の独立した別個に可動な区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される。第二のジョーは、第一のジョーに接続される。第二のジョーは、アンビルを支持する。アンビルは、複数のステープル形成くぼみを規定する。複数のステープル形成くぼみは、ステープルカートリッジの複数のステープル保持スロットに応じて並列される。圧力感知要素は、各ステープルカートリッジと第一のジョーとの間に置かれる。各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する。
【0023】
エンドエフェクタは、各ステープルカートリッジ区分と第一のジョーとの間に置かれた付勢部材をさらに含み得る。付勢部材は、各ステープルカートリッジ区分を第一のジョーから一定の距離を置かれた距離に維持し得る。
【0024】
ステープルカートリッジは、ステープル保持スロットの少なくとも2つの平行な列を規定し得る。ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分において提供され得る。
【0025】
付勢部材は、力がステープルカートリッジ区分のいずれかの組織接触表面に及ぼされると、圧縮し得る。
【0026】
本開示のさらに別の局面に従って、電気外科ステープリングシステムが提供され、電力外科手術装置およびエンドエフェクタを含む。電力外科手術装置は、ハンドル部分を含む。ハンドル部分は、外科手術ステープリングエンドエフェクタをハンドル部分に解除可能に接続するように構成および適合されている。ハンドル部分は、アクチュエータと、モーターと、電源とコントローラーとを含む。アクチュエータは、エンドエフェクタに接続し、エンドエフェクタを駆動させる。モーターは、アクチュエータを駆動させる。電源は、モーターに電力供給する。コントローラーは、電源およびモーターの少なくとも1つを制御する。エンドエフェクタは、電力外科手術装置のハンドル部分に選択的に接続するように構成されている。エンドエフェクタは、第一のジョーと、ステープルカートリッジと、第二のジョーと、圧力感知要素とを含む。ステープルカートリッジは、第一のジョー上で支持される。ステープルカートリッジは、組織接触表面を規定する。ステープルカートリッジは、複数の独立した別個に可動な区分に分割される。少なくとも1つのステープル保持スロットは、各区分において規定される。第二のジョーは、第一のジョーに接続される。第二のジョーは、アンビルを支持する。アンビルは、複数のステープル形成くぼみを規定する。複数のステープル形成くぼみは、ステープルカートリッジの複数のステープル保持スロットに応じて並列される。圧力感知要素は、各ステープルカートリッジ区分と第一のジョーとの間に置かれる。各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する。各圧力感知要素は、コントローラーと電気通信する。コントローラーは、ステープルカートリッジ区分の少なくとも1つに及ぼされ、それぞれの圧力感知要素によって感知された力が所定の閾値力を超えた場合、第一のジョーの接近と電力外科手術装置の発射とのうちの少なくとも1つを停止させる。
【0027】
エンドエフェクタは、各ステープルカートリッジ区分と第一のジョーとの間に置かれた付勢部材をさらに含み得る。付勢部材は、各ステープルカートリッジ区分を第一のジョーから一定の距離を置いた距離に維持し得る。
【0028】
エンドエフェクタのステープルカートリッジは、ステープル保持スロットの少なくとも2つの列を規定し得る。ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分において提供され得る。
【0029】
エンドエフェクタの付勢部材は、力がステープルカートリッジ区分のいずれかの組織接触表面に及ぼされると、圧縮し得る。
【0030】
エンドエフェクタの第一のジョーおよび第二のジョーは、平行な接近のために構成され得る。
【0031】
例えば、本発明は、以下の項目を提供する。
(項目1)
外科手術ステープリング装置であって、
アクチュエータを有するハウジングと、
該ハウジングから延びる細長い部材と、
該細長い部材の端部上に配置されたエンドエフェクタであって、該エンドエフェクタは、第一のジョーと第二のジョーとを有し、該第一のジョーは、ステープルカートリッジを有し、該第二のジョーは、複数のステープル形成くぼみを有し、該ステープルカートリッジは、少なくとも第一の区分と第二の区分とを有し、該第一の区分および該第二の区分は、各々、組織接触表面およびステープル受容スロットを有し、該ステープル受容スロットは、該組織接触表面において規定され、該第一の区分および該第二の区分は、該第二のジョーの方へ付勢され、かつ、可動である、エンドエフェクタと、
該第一の区分および該第二の区分の各々のための付勢部材と、
該第一の区分および該第二の区分の各々のための圧力センサーと
を含む、外科手術ステープリング装置。
(項目2)
圧力が閾値を超えている場合を決定する構成要素をさらに含む、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目3)
アクチュエータに動作可能に接続されたモーターをさらに含む、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目4)
上記モーターは、上記ハウジングにある、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目5)
電源を上記ハウジング内にさらに含み、該電源は、上記モーターに動作可能に接続される、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目6)
上記構成要素は、上記モーターを停止するようにプログラムされている、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目7)
上記ステープル形成くぼみおよび上記ステープル受容スロットは、直線状の列を規定する、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目8)
上記直線状の列は、上記細長い部材の長手方向軸に対して横切って延びる、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目9)
上記ステープル形成くぼみおよび上記ステープル受容スロットは、上記エンドエフェクタの長手方向軸に対して角度を規定する、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目10)
外科手術装置に選択的に接続するエンドエフェクタであって、
該エンドエフェクタは、
第一のジョーと、
該第一のジョー上に支持されるステープルカートリッジであって、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に可動な区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、該複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して並列される、第二のジョーと、
圧力感知要素であって、該圧力感知要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタ。
(項目11)
付勢部材であって、該付勢部材は、各ステープルカートリッジ区分と上記第一のジョーとの間に置かれる、付勢部材をさらに含み、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置いた距離に維持する、上記項目のいずれかに記載のエンドエフェクタ。
(項目12)
上記ステープルカートリッジは、ステープル保持スロットの少なくとも2つの平行な列を規定し、ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分に提供される、上記項目のいずれかに記載のエンドエフェクタ。
(項目13)
上記付勢部材は、力が上記ステープルカートリッジ区分のいずれかの上記組織接触表面に及ぼされると、圧縮する、上記項目のいずれかに記載のエンドエフェクタ。
(項目14)
電気外科ステープリングシステムであって、
該電気外科ステープリングシステムは、
電力外科手術装置であって、該電力外科手術装置は、
ハンドル部分であって、該ハンドル部分は、解除可能に外科手術ステープリングエンドエフェクタを該ハンドル部分に接続するように構成および適合されており、該ハンドル部分は、アクチュエータ、モーター、電源およびコントローラーを含み、該アクチュエータは、該エンドエフェクタに接続し、該アクチュエータは、該エンドエフェクタを駆動させ、該モーターは、該アクチュエータを駆動させ、該電源は、該モーターに電力供給し、該コントローラーは、該電源および該モーターのうちの少なくとも1つを制御する、ハンドル部分と、
エンドエフェクタであって、該エンドエフェクタは、該電力外科手術装置の該ハンドル部分への選択的接続のために構成されており、該エンドエフェクタは、
第一のジョーと、
ステープルカートリッジであって、該ステープルカートリッジは、該第一のジョー上で支持されており、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に稼動名区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して配列される、第二のジョーと、
圧力感知要素であって、該圧力監視要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分におよぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタと、
を含む、電力外科手術装置を含み、
各圧力感知要素は、該コントローラーと電気通信しており、
該コントローラーは、該第一のジョーおよび該第二のジョーの接近と、該電力外科手術装置の発射とのうちの少なくとも1つを、該ステープルカートリッジ区分のうちの少なくとも1つに及ぼされ、該それぞれの圧力感知要素によって感知された力が所定の閾値力を超えた場合に停止する、電気外科ステープリングシステム。
(項目15)
上記エンドエフェクタは、付勢部材をさらに含み、該付勢部材は、各ステープリングカートリッジ区分と上記第一のジョーとの間に置かれ、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置かれた距離に維持する、上記項目のいずれかに記載の電気外科ステープリングシステム。
【0032】
(摘要)
外科手術ステープリング装置が提供され、ハウジングと、細長い部材と、エンドエフェクタと、第一の区分および第二の区分の各々に対する付勢部材と、第一の区分および第二の区分の各々に対する圧力センサーとを含む。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の端部上に配置される。エンドエフェクタは、第一のジョーおよび第二のジョーを有する。第一のジョーは、ステープルカートリッジを有する。第二のジョーは、複数のステープル形成くぼみを有する。ステープルカートリッジは、少なくとも第一の区分および第二の区分を有する。第一の区分および第二の区分は、各々、組織接触表面およびステープル受容スロットを有する。ステープル受容スロットは、組織接触表面において規定される。第一の区分および第二の区分は、第二のジョーの方へ付勢され、可動である。
【0033】
本開示の上および他の局面、特徴および利点は、添付の図面に関連してみられた場合、以下の詳細な説明に照らすと、より明らかとなる。
【図面の簡単な説明】
【0034】
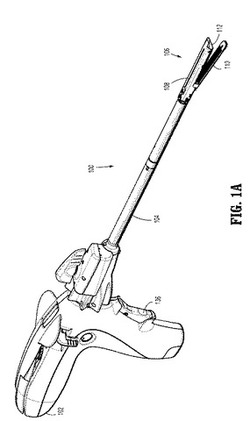
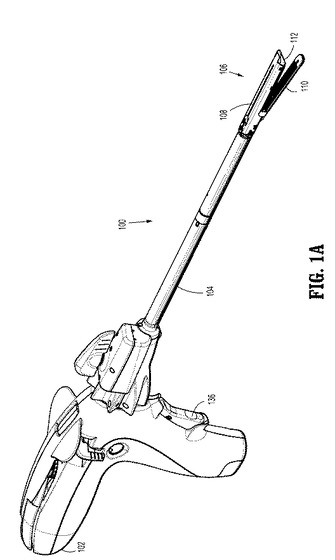
【図1A】図1Aは、電力外科手術ステープリング装置の透視図である。
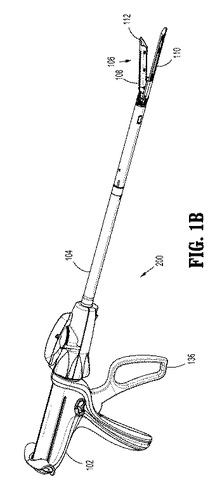
【図1B】図1Bは、手動外科手術ステープリング装置の透視図である。
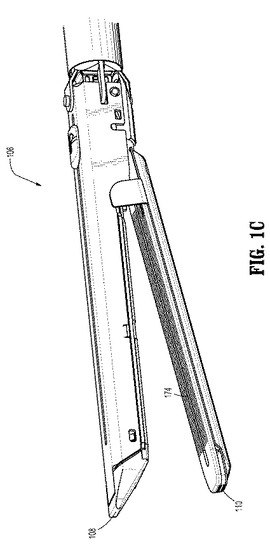
【図1C】図1Cは、外科手術ステープリング装置のエンドエフェクタの拡大透視図である。
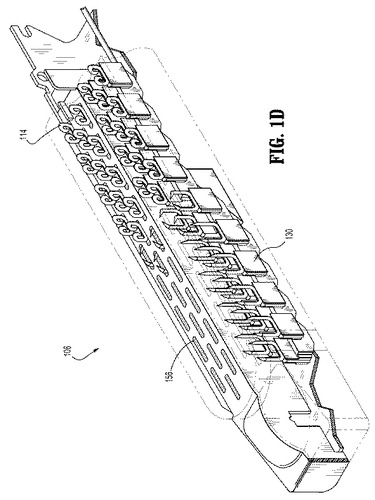
【図1D】図1Dは、ウェッジがカートリッジを通り並進することによって、続けてファスナーをカートリッジから噴出し、ファスナーをジョーのうちの1つに対して駆動させ、それによってファスナーが形成される、ファスナー適用動作中のエンドエフェクタの透視図である。
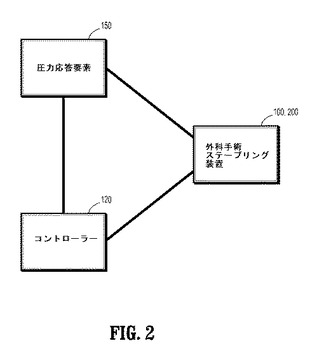
【図2】図2は、本開示に従う外科手術ステープリングシステムの概略図である。
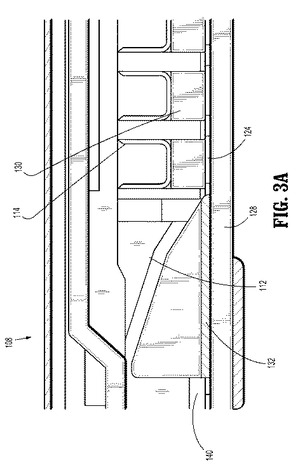
【図3A】図3Aは、図1Aおよび図1Bの外科手術ステープリング装置のエンドエフェクタの一部の側面断面図である。
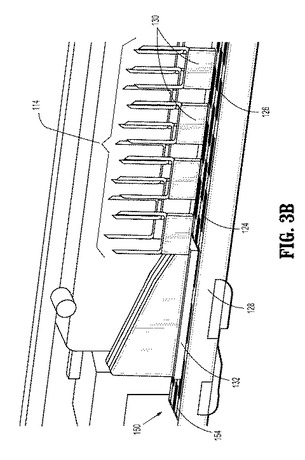
【図3B】図3Bは、明確になるように、カートリッジの壁が取り外された、図1Aおよび図1Bの外科手術ステープリング装置のエンドエフェクタの一部の側面断面図である。
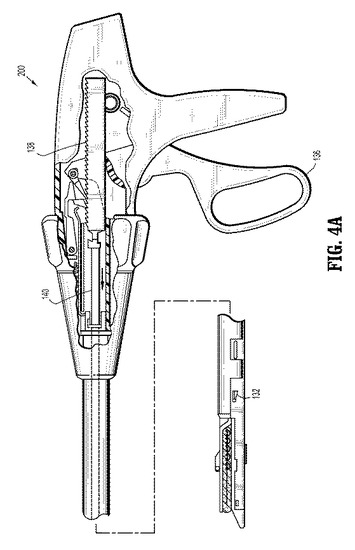
【図4A】図4Aは、作動機構を例示するためにハウジングを区切った、アクチュエータが1つの作動ストロークによって操作され、ファスナーの一部をカートリッジから組織に適用する場合の図1Bの外科手術ステープリング装置の側面立面図である。
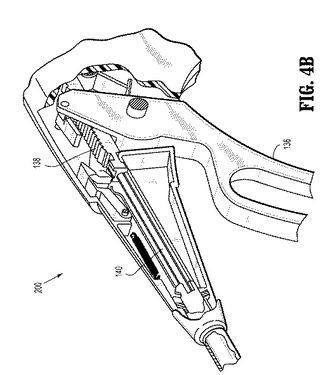
【図4B】図4Bは、本開示に従う図4Aの外科手術ステープリング装置の部分的な断面における透視図である。
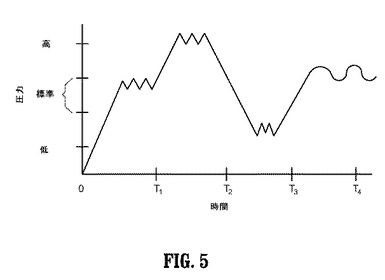
【図5】図5は、ステープル対時間を形成するために印加された圧力の図表である。
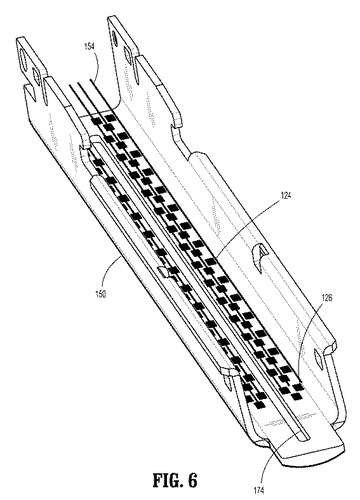
【図6】図6は、カートリッジにプリント圧力回路が配置されたカートリッジの内部チャネルの透視図である。
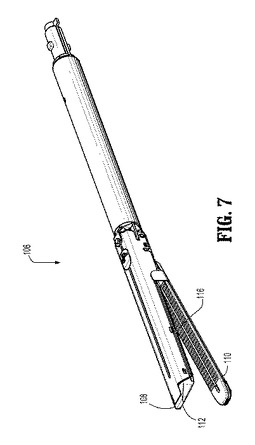
【図7】図7は、ジョーのうちの1つにおけるナイフスロットを例示する図1Aおよび図1Bの可動エンドエフェクタの透視図である。
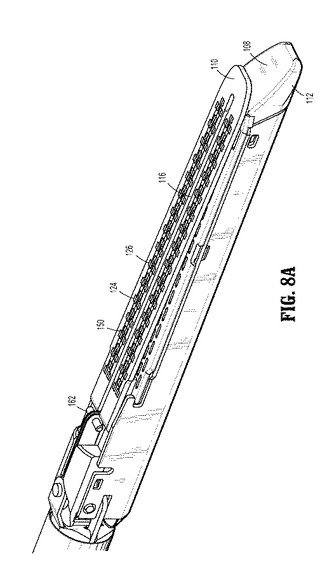
【図8A】図8Aは、明確になるように、アンビルカバーを取り外され、圧力回路を示す図7のエンドエフェクタの透視図である。
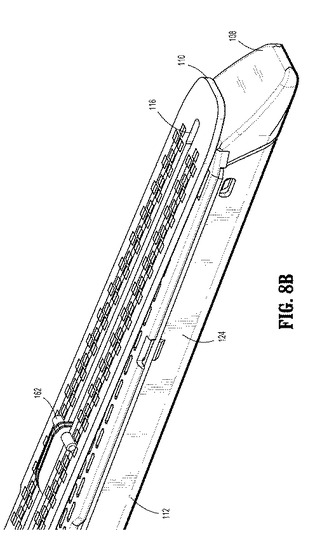
【図8B】図8Bは、図8Aにおいて開示される実施形態の拡大透視図である。
【図9】図9は、本開示の一実施形態に従うエンドユーザーフィードバック通信特徴の概略図である。
【図10】図10は、本開示の一実施形態に従うカートリッジ識別特徴の概略図である。
【図11】図11は、本開示の一実施形態に従うエンコーダ特徴の概略である。
【図12】図12は、本開示の別の実施形態に従う電力外科手術ステープリング装置としての外科手術デバイスまたはエンドエフェクタの透視図である。
【図13】図13は、図12の外科手術デバイスまたはエンドエフェクタの分解組み立て図である。
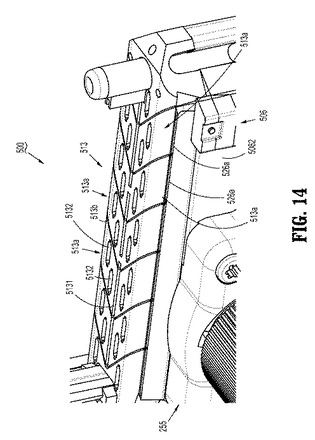
【図14】図14は、図12の外科手術デバイスまたはエンドエフェクタのステープルカートリッジフレームハウジングにおいて支持されたステープルガイドを例示する拡大透視図である。
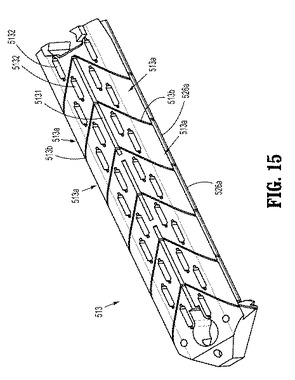
【図15】図15は、図12の外科手術デバイスまたはエンドエフェクタのステープルガイドの拡大透視図である。
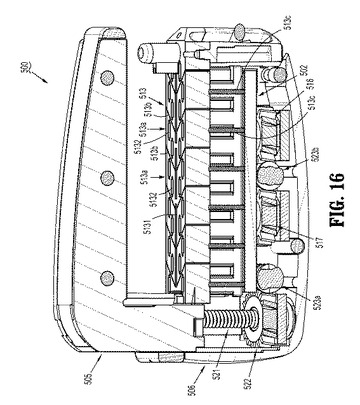
【図16】図16は、図12の16−16を通して取られた、図12の外科手術デバイスまたはエンドエフェクタの断面図である。
【発明を実施するための形態】
【0035】
(実施形態の詳細な説明)
本開示の外科手術ステープリング装置の実施形態がここで図面を参照して詳細に説明される。類似の参照数字は、複数の図の各々において、同一または対応する要素を指す。
【0036】
図面において示され、以下の説明を通して説明され、対象物上への相対的な位置決めを参照した場合、伝統であるように、用語「近位」は、ユーザーにより近い装置の端部を指し、用語「遠位」は、ユーザーからより遠い装置の端部を指す。以下の説明において、周知の機能または構造は、本開示を不必要な詳細で不鮮明にすることを避けるため、詳細には説明されない。
【0037】
図1Aは、全体が100として示される電力外科手術ステープリング装置を例示する。図1Bは、全体が200として示される手動の外科手術ステープリング装置を例示する。簡潔には、外科手術ステープリング装置100、200は、アクチュエータ136を有するハウジング102と、ハウジング102から延びる細長い部材104と、細長い部材104のうちの1つの端部上に配置されたエンドエフェクタ106とを含む。図1C〜1Dから、エンドエフェクタ106は、第一および第二のジョー108、110と、エンドエフェクタ106に配置された複数のファスナー114と、エンドエフェクタ106に設けられた複数の推進器部材130とを含む。複数の推進器部材130の各推進器部材130は、動作可能にファスナー114の部材に連結される。図3A〜4Bにおいてみられるように、外科手術ステープリング装置100、200は、動作可能にアクチュエータ136に連結された作動機構138を含む。作動機構138は、長手方向に並進可能な駆動部材140と、それに連結された作動スレッド132とを含む。作動スレッド132は、複数の推進器部材130を係合するために構成されている。
【0038】
本開示の一実施形態に従って、図2の図において、外科手術ステープリングシステムは、外科手術ステープリング装置100、200を有する。外科手術ステープリング装置100、200は、圧力応答要素150およびコントローラー120を有する。圧力応答要素は、ジョー108、110(図3A〜3Bおよび8A〜8B)のうちの1つに配置されることが予想される。圧力応答要素150は、圧力信号152(示されていない)を外科手術ステープリング装置100、200に連結されたコントローラー120に通信し得る。コントローラー120は、制御、位置決め、状態およびファスナー114の質フィードバックを可能にするマイクロコントローラーまたはアナログ回路である。圧力信号152は、圧力応答要素150に印加された圧力を表す。この実施形態は、ナイフ164を含み得るか、または含まない場合があることが予想され、ナイフ164は、ナイフスロット174(図1C)を通り、スライドするように並進可能である。
【0039】
図5を参照すると、印加された圧力が、時間対印加された圧力グラフにおいてみられるように、波形拍動の形態で測定され得る。例えば、通常のサンプルは、0〜t1の期間を含むグラフに従って読まれ得る。あるサンプリング中、波形拍動が、低い(t2〜t3)または高い(t1〜t2)圧力を示した場合、このことは、不適切な印加された圧力配分に起因して、ファスナー114が適切に配備または形成されていないことの示しであり得る。印加された圧力配分は、適切なファスナー114の配備または形成のために必要である。あるいは、波形が成功したテスト波形(t3〜t4)に相関された形状に波形がない場合、エラーコードまたはフィードバックがコントローラー120によって初期化され、配備または形成連続を停止する。このことは、先に進むか、またはバックアウトする前に、性能不規則性を適切に理解する能力をユーザーに付与する。
【0040】
図3A〜3Bにおいてみられるように、第一のジョー108は、カートリッジ112を受容するカートリッジチャネル128を含む。カートリッジ112は、その中に配置された複数のファスナー114を含む。一般的に、ファスナー114は、複数の外科手術ステープルの形態である。カートリッジ112は、複数の線形な列のファスナー114を収容し、ファスナーは、動作可能に推進器部材130に連結される。
【0041】
ここで図6を参照すると、一発現形態の圧力応答要素150は回路124を含み、少なくとも1つのリード154は、少なくとも1つの圧力センサー126を接続する。複数の圧力センサー126が外科手術ステープリング装置100、200上に配置されることも予期される。一例において、リード154は、複数の圧力センサー126にわたり、長手方向軸に沿って線形な連続に延びる。少なくとも1つの圧力センサー126は、各ファスナー114または推進器部材130に対応する。ファスナー114の各線形な列および/または推進器部材130は、少なくとも1つのリード154によって接続される。少なくとも1つのリード154は、線形な列に沿って延び、回路124の長手方向軸に沿って延びる。回路124は、可撓性またはプリント圧力回路124である。
【0042】
この実施形態において、回路124は、カートリッジチャネル128の(作業)上面に接着され、回路124は、回路124を通り並進する作動スレッド132と相互作用し得る。換言すると、回路124は、カートリッジチャネル128内に配置されることによって、作動スレッド132がカートリッジチャネル128を通り並進した場合、作動スレッド132を嵌合するように係合する(図3A〜3B)。
【0043】
図7〜8Bは、外科手術ステープリング装置100、200の別の実施形態を示す。図8A〜8Bにおいてみられるように、外科手術ステープリング装置100、200は、圧力応答要素150を含む。圧力応答要素150は、回路124を含み、回路124は、ジョー108、110のうちの少なくとも1つの外側表面上に配置される。好ましくは、回路124は、第二のジョー110の外側表面上に配置される。この実施形態は、ビーム162を含む。ビーム162は、ジョー108、110のうちの少なくとも1つの外側表面上に配置される。好ましくは、ビーム162は、第二のジョー110の外側表面上に配置される。ビーム162が溝116にスライドするように据え付けられることも予期される。溝116は、ジョー108、110のうちの少なくとも1つ内に配置され、作動スレッド132に接続される(図8Aおよび8B)。ビーム162は、第二のジョー110内に配置された溝116にスライドするように据え付けられる。ビーム162は、溝116に沿って並進するように構成されている。ビームは、IビームまたはEビームである。この回路112は、外科手術ステープリング装置100、200に対して非常に薄いことが予想され、カートリッジ112の全体のサイズまたは機能を損なわせないか、または大きく影響しない少なくとも幾何学的に十分薄い寸法を有する。
【0044】
いくつかの発現形態において、圧力センサー126がずらされる(図3B、6、8A、8B)。一配列における回路124がずらされ、詳細な情報が各ファスナー114またはファスナー114のグループに対して得られ得るように最適化される。各ファスナー114またはファスナー114のグループは、それらの関連付けられた推進器部材130によって形成される。圧力センサー126を近位から遠位位置にファスナー114に対して外科手術ステープリング装置100、200内でずらすことによって、外科手術ステープリング装置100、200は、各ファスナー114の配備タイミングおよび完了を決定するように構成され得る。このことは、外科手術ステープリング装置100、200をコントローラー120によって制御するために価値があり、クランプする各特定のカートリッジ112の限界、遠位停止または定位置を立証する。コントローラー120は、アナログまたはミクロ電子回路を有し得る。
【0045】
ファスナー114連続が展開すると、圧力応答要素150は、圧力信号152をコントローラー120に、電圧、抵抗、インピーダンス、電磁気、高周波、電流、インダクタンス、静電容量、赤外線および光学を含むグループから選択された少なくとも1つの通信手段によって通信する。動作において、圧力応答要素150は、ファスナー114が連続して配備および形成された場合(図5)、印加された圧力をたどる。いくつかの場合において、印加された圧力は、波長拍動の形態でたどられ得る。コントローラー120が圧力応答要素150から通信された圧力信号152によって表される不規則な圧力パターンを認識した場合、コントローラー120は、それに応じて、エラーを登録し、エラーコードを出すことか、警告を出すことか、ファスナー114形成を停止することか、またはファスナー114配備を停止することさえ行うように構成され得る。
【0046】
圧力応答要素150は、また、線形なカートリッジ112構成と非線形なカートリッジ112構成との両方のために構成され得る。ジョー108、110のうちの少なくとも1つ(好ましくは、第一のジョー108)が非線形なカートリッジを含むことが予想される。換言すると、圧力応答要素150は、線形なカートリッジ112外科手術ステープリング装置100、200または非線形なカートリッジ112外科手術ステープリング装置100、200(ファスナー質または連続状態を評価するために要求される湾曲したか、円形か、または任意の他の幾何学的形状にされたカートリッジ112を含む)として用いられ得る。
【0047】
しばしば、外科手術ステープリング装置100、200は、ナイフ164を含み得る。本開示の一発現形態において、外科手術ステープリング装置100、200は、コントローラー120がナイフ164が切断することを妨げるように構成および寸法とされている。換言すると、コントローラー120は、エンコーダ166(つまり、ナイフ切断妨害特徴)を含む。図11においてみられるように、一構成は、外科手術ステープリング装置100、200の不規則な動作を認識するように構成されているエンコーダ166を予期する。いくつかの例において、エンコーダ166は、印加された圧力に対して構成要素の位置を認識するような構成および寸法とされている。構成要素は、作動機構138、ナイフ164、アクチュエータ136、作動スレッド132、推進器部材130、第一のジョー108および第二のジョー110またはそれらの任意の組み合わせを含むグループから選択される。エンコーダ166は、回転可能であり得るか、または線形でさえあり得る。
【0048】
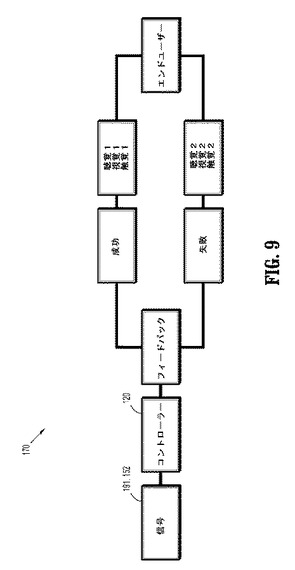
図9を参照すると、いくつかの発現形態において、コントローラー120は、エンドユーザーフィードバック通信特徴170を含む。エンドユーザーフィードバック通信特徴170は、信号152、191を、聴覚(ベル、発話、ブザー、ビープ音など)、視覚(光、LED、LCDまたはさまざまな色のエレクトロルミネッセンススクリーン、テクストおよび/またはシンボル)および触覚(振動)を含むグループから選択された少なくとも1つの手段によって受信および解読した後、エンドユーザーにフィードバックを通信するように構成されている。例えば、フィードバックは、ファスナー配備連続の開始、ファスナー配備および形成の完了、個々のファスナー配備、個々のファスナー形成のようなタスク、または当業者によって認識される他の類似タスクの成功した完了または失敗した完了を示すように構成され得る。
【0049】
回路124が裂けることまたは擦れから保護し、正確で反復可能なフィードバックを達成するために、Kapton(登録商標)ポリイミドフィルムまたはチタンの箔または鋼合金またはフラッシュコーティングされたニッケル、クロムまたは窒化物コーティングのような薄く、硬い表面材料が回路124の上部層にラミネートをかぶせ得、ラミネート158を規定する。さらに、潤滑なコーティング160もラミネート層に適用され得る。潤滑なコーティング160は、任意の低摩擦プラスチック、グリース、PTFEブレンド材料または任意の他の同種の潤滑剤であり得る。潤滑剤160は、質出力圧力信号152を達成することに対して有益であり、作業構成要素のエラーの強さを改善することに対して有益である。
【0050】
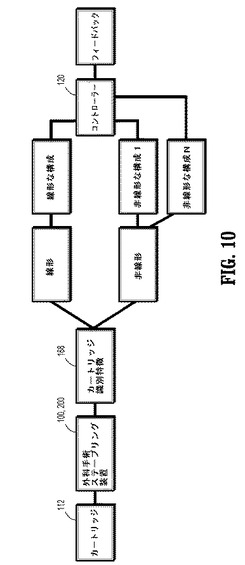
図10において見られるように、外科手術ステープリング装置100、200は、特徴168を識別するカートリッジを含む回路124を有し得る。特に、圧力応答要素150は、少なくとも1つの回路124を含む。各回路124は、抵抗、インダクタンスの特定電気範囲または値、またはコントローラー120によって読まれ得るインピーダンスを有することによって、識別のために、装填されたカートリッジ112またはエンドエフェクタ106の正確なタイプを決定する。この特徴によって、外科手術ステープリング装置100、200は、カートリッジ112またはファスナー114の特定位置限界および/または運転モードを設定するように構成されているコントローラー120を含む。
【0051】
動作において、エンドユーザー(示されていない)がアクチュエータ136を作動させた場合、作動機構138は、作動スレッド132を推進器部材130に相互作用させる(図4A)。ある変形例において、アクチュエータ136は、作動スレッド132ならびに第一および第二のジョー108、110を作動させる別個の作動特徴を含む。例えば、作動スレッドアクチュエータ136aが作動スレッド132をリモートで作動させるために用いられ、ジョーアクチュエータ136bが第一および第二のジョー108、110を作動させるために用いられる。あるいは、単一のアクチュエータ136が作動スレッド132とジョー108、110との両方を作動させるために用いられる。別の例において、別個のアクチュエータ136は、個々の第一および第二のジョー108、110に接続される。
【0052】
作動させると、作動スレッド132は、推進器部材130を上方へ押し込み、ファスナー114を対向する第二のジョー110表面、特にファスナー形成ポケット156の中に入れる(図1D)。図1Dから、最初の構成において、ファスナー114は、実質的にU形状の構成の形状とされる。完全に形成された構成において、ファスナー114は、実質的にB形状の構成の形状とされる。ファスナー114を第一の構成から第二の構成に変形させる処理において、第二のジョー110は、アンビルとして作用し、ファスナープロング114a、114bがファスナー形成ポケット156を係合するのに応じて、ファスナー114を第二の構成のB形状に圧縮する。そのため、圧力応答要素150に印加されたこの結果の圧力は、作動スレッド132と推進器部材130との間の相互作用の結果である。
【0053】
圧力応答要素150がカートリッジチャネル128内に配置された回路112を含む実施形態において、上方駆動ファスナー114、推進器部材130および作動スレッド132の組み合わせに対する第二のジョー110の下方への力は、結果として、反応力がファスナー114、推進器部材130および作動スレッド132の組み合わせを対向する下方方向ならびに回路112および任意の圧力センサー126に対して通過させる。圧力センサー126は、それに対応して、印加された圧力を登録する。次いで、圧力応答要素150は、圧力信号152をコントローラー120に通信し、コントローラー120において、圧力信号152は、圧力応答要素152に印加された圧力を表す。コントローラー120は、圧力信号152を受信し、圧力信号152に基づいて、応答またはフィードバックを選択的に出す。
【0054】
ある実施形態において、圧力応答要素150は、ジョー108、110のうちの1つの外側表面上に配置された回路112を含む。例えば、回路112が第二のジョー110の外側表面上に配置された場合、両方のビーム162および作動スレッド132が長手方向に第一および第二のジョー108、110に沿って並進すると、印加された圧力は、作動スレッド132に接続されるビーム162から回路112上に置き換えられる。換言すると、作動スレッド132が並進して、推進器部材130を係合した場合、推進器部材130は、ファスナー114を第二のジョー110およびファスナー形成ポケット156の中に上へ駆動させる。このことは、結果として、作動スレッド132がビーム162を結果の下方の反応力により、圧力形成ポケット156から引き降ろさせた場合、下方の反応力をビーム162に回路112上に上に置き換えさせ、ファスナー114および推進器部材130を作動スレッド132上に通過させる。圧力センサー126は、これに応じて、印加された圧力を登録する。次いで、圧力応答要素150は、圧力信号152をコントローラー120に通信し、コントローラー120において、圧力信号152は、圧力応答要素152に印加された圧力を表す。コントローラー120は、圧力信号152を受信し、圧力信号152に基づいて応答またはフィードバックを選択的に出す。
【0055】
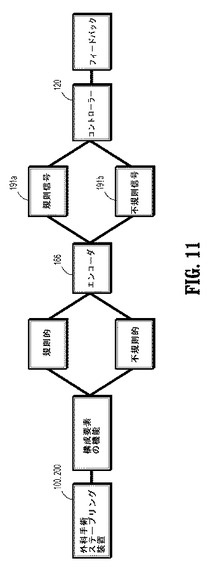
エンコーダ166を含む実施形態において、エンコーダ166は、外科手術ステープリング装置100、200の構成要素の不規則な動作を認識するように構成されており、それらの構成要素は、作動機構138、ナイフ164、アクチュエータ136、作動スレッド132、推進器部材130、第一のジョー108および第二のジョー110を含むグループから選択され得る。エンコーダ166がナイフ164の位置を監視するように構成されており、エンコーダ166がナイフ164の不規則な位置を認識する一例において、エンコーダ166は、不規則性をコントローラー120にエンコーダ信号191(規則信号191aまたは不規則信号191bのどちらか一方)を介して通信する。不規則信号191bを受信すると、コントローラー120は、エラーコードを登録し、いくつかの例において、コントローラー120は、ファスナー留めなしの切断を妨げるように構成されている。
【0056】
エンコーダ166は、エンコーダ信号191をコントローラー120に、電圧、抵抗、インピーダンス、電磁気、高周波、電流、インダクタンス、静電容量、赤外線および光学から選択された少なくとも1つの手段によって通信する。コントローラー120は、エンコーダ信号191を圧力応答要素150から受信することと、構成要素動作(例えば、ナイフ164の不規則な位置決め)に対するファスナー114配備および形成不均衡を決定することとを行うような構成および寸法とされていることも予想される。コントローラー120は、また、エラーコードを初期化することか、またはファスナー114配備設定を改変することとを行うような構成および寸法とされている。
【0057】
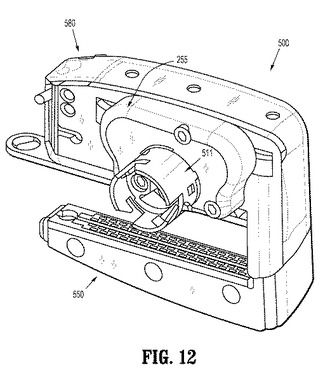
ここで、図12〜16を参照すると、外科手術デバイスまたはエンドエフェクタが本開示の別の実施形態に従う電力外科手術ステープリング装置として示され、全体が500として指定される。エンドエフェクタ500は、平行分離ジョーシステムを含み、対向するジョーは、互いに対して接近及び分離中に平行なままである。エンドエフェクタ500は、電気機械電源(示されていない)の電力回転駆動シャフトへ接続する能力を有するように構成されている。
【0058】
図12および図13においてみられるように、エンドエフェクタ500は、第一のジョー580および第二のジョー550を含み、第一のジョー580および第二のジョー550は、互いにそれぞれの第一の端部において接触することによって平行な接近および分離を可能にする。
【0059】
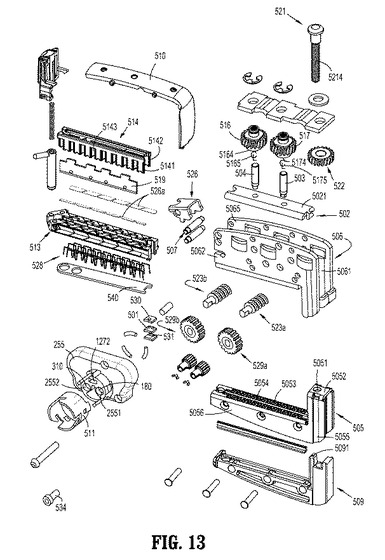
図13においてみられるように、第二のジョー550は、アンビル505を含む。アンビル505は、垂直に配置された内側がねじ状の穴5051を上方端部5052において有し、アンビル505の領域5054に沿って平行な列に配列された複数のステープルガイド5053を有する。アンビル505は、第一のジョー580に対向および対応する。
【0060】
引き続き図13を参照すると、第一のジョー580は、ハウジングフレーム506を含む。ハウジングフレーム506は、一対の内側に配置されたガイド5061を規定する。ガイド5061に沿って、第二のジョー550のアンビル505の一対のリブ5055が移動し得、ハウジングフレーム506は、アンビル505の方およびアンビル505から離れて動き得るが、アンビル505と平行なままである。
【0061】
ギアハウジング255は、ハウジングフレーム506の1つの側面5062に搭載される。クイックコネクト連結511は、ギアハウジング255上に搭載される。メモリモジュール501は、ギアハウジング255に配列され、コネクター2554を含む。コネクター2554は、ギアハウジング255の開口部2553を通り延びるか、または開口部2553を通りアクセス可能である。メモリモジュール501は、ギアハウジング255内の位置に機内シム530および機外シム531によって維持される。ギアハウジング255は、第一の駆動ソケット180および第二の駆動ソケット310を含む。この実施形態において、ギアハウジング255の第一の駆動ソケット180は、第一のピニオン508aを含み、ギアハウジング255の第二の駆動ソケット310は、第二のピニオン508bを含む。
【0062】
第一および第二のピニオン508a、508bの各々は、それぞれの第一および第二の平歯車529a、529bを係合する。第一の平歯車529aは、回転せずに第一のウォーム523aを係合する。第二の平歯車529bは、回転せずに第二のウォーム523bを係合する。第一のウォーム523aおよび第二のウォーム523bの各々のねじ状の部分は、フレームハウジング506内に配置される。
【0063】
ギア522もフレームハウジング506内に配置される。ギア522は、ねじ状に第一のウォーム523aのねじ状の部分を係合する。ギア522は、回転せずにスクリュー521を係合する。スクリューは、外側に配置されたスレッド5214を含み、スレッド5214は、アンビル505の内側がねじ状の穴5051を係合する。
【0064】
第一のギア516および第二のギア517は、フレームハウジング506内に配置される。第一のギア516および第二のギア517は、第二のウォーム523bの反対の側面上に位置決めされ、係合される。特に、第一のギア516は、第二のウォーム523bの第一の側面を係合し、第二のギア517は、第二のウォーム523bの第二の側面を係合する。
【0065】
外側がねじ状のスクリュー504は、第一のギア516の内側がねじ状の穴5164を通して配置され、外側がねじ状のスクリュー503は、第二のギア517の内側がねじ状の穴5174を通して配置される。第一および第二のギア516、517は、第二のウォーム523bの反対の側面上に設けられ、係合するので、第一および第二のギア516、517の内側がねじ状の穴5164、5174ならびに外側がねじ状のスクリュー504および503は、互いに対向して、ねじ状にされ得る。スクリュー503と504との両方は、推力プレート502の上部表面5021にしっかり連結される。推力プレート502は、ハウジングフレーム506の反対の側壁の間に位置決めされる。
【0066】
ステープル推進器514は、推力プレート502の底部表面に取り付けられる。ステープル推進器514は、下方に配置された歯5143の平行な列5141および5142を含み、それらの各々は、アンビル505のステープルガイド5053に対応し、一列に並ぶ。カッティングエッジ5191(図13において対面して示される)を有するナイフ519は、ステープル推進器514の下方に配置された歯5143の平行な列の間に配置される。
【0067】
ステープルホルダーまたはカートリッジ513は、ステープル推進器514の下に配置される。ステープルカートリッジ513は、垂直に配列されたスロット5132を規定し、それらの各々は、ステープル推進器514の下方に配置された歯5143およびアンビル505のステープルガイド5053に対応し、一列に並ぶ。ステープル528は、各スロット5132に提供される。ステープルカートリッジ513も長手方向に配置されたスロット5131を含み、スロット5131をナイフ519が通過され得る。
【0068】
ステープル保持器540が提供され、ステープル528をステープルカートリッジ513内に維持し、異物がステープルカートリッジ513のスロット5132にエンドエフェクタ500の積出し中に入ることを妨げるために、ステープルカートリッジ513の底部表面を覆うように構成されている。
【0069】
ハウジング上部510が提供され、ハウジングフレーム506の反対の側面5062と5065との間に配列され、ハウジングフレーム506内の構成要素を保護する。
【0070】
2002年3月8日に出願された、名称が「Surgical Device」の米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)に参照がなされ得、その全内容は、本明細書において参照することによって援用され、エンドエフェクタ500の構成要素、構造および動作のより詳細な議論がなされる。さらに、エンドエフェクタは、細長いシャフトを含み得る電力器具ハンドルに接続可能である。別個の分離可能シャフトも用いられ得る。米国特許出願公開第2003/0130677号において開示されるように、シャフトは、ハウジングから延び、第一の連結を介してハウジングに分離可能に取り付けらる可撓性シャフトであり得る。可撓性シャフトの遠位端部は、上で説明されたエンドエフェクタを可撓性シャフトの遠位端部に分離可能に取り付けるように適合される第二の連結を含み得る。第二の連結も異なるタイプのエンドエフェクタを分離可能に取り付けるように適合され得る。別の例示的実施形態において、可撓性シャフトの遠位端部は、外科手術器具ハンドルに永続的に取り付けられ得るか、または統合され得る。
【0071】
シャフトは、例えば、編成駆動ケーブルまたはらせん状駆動ケーブルのような第一の回転可能駆動シャフトおよび第二の回転可能駆動シャフトを含み得る。駆動シャフトは、低トルクだが高速なトルクを外科手術器具またはアタッチメントにおいて伝達するように構成され得る。高速/低トルクは、低速/高トルクに、例えば、駆動可撓性シャフトの遠位端部および/または近位端部に配置されたギア配列によって変換される。リモート電力コンソールまたは電力器具ハンドルに配置された電気機械ドライバー要素は、回転可能シャフトを動作させるために用いられる。
【0072】
ある好ましい実施形態において、コントローラーがリモート電力コンソールのハウジングまたは電力器具ハンドルに提供され、コントローラーは、可撓性シャフトに取り付けられたエンドエフェクタの機能および動作の一部または全てならびに器具全体を監視および/または制御するように構成されている。メモリユニットが提供され、ROM構成要素、RAM構成要素などのようなメモリデバイスを含み得る。RAMおよびROM構成要素は、コントローラーと適切な配線を介して電気または論理通信している。メモリユニットもコントローラーまたは他の構成要素とワイヤレスで通信し得る。
【0073】
ここで、図13〜16を参照すると、本開示に従うステープルカートリッジ513を含むエンドエフェクタ500のより詳細な議論が提供される。図13〜16においてみられるように、ステープルカートリッジ513は、その軸長さに沿って区分される。特に、ステープルカートリッジ513は、複数の個々の、別個に移動可能な本体部材または区分513aから形成される。本体部材または区分513aは、ステープルカートリッジ513の長さに沿って、軸方向に延びる。各区分513aは、ステープルカートリッジ513の組織接触表面によって規定される面を横切る方向または直交する方向に自由に動く。
【0074】
図14〜16においてみられるように、スロット5132は、ステープル528をその中に保持するために、少なくとも2つの長手方向に延びる平行な列で配列される。平行な列は、ナイフスロット5131の各側面上に配置される。各対の列のスロット5132は、互いに対してオフセットされるか、またはずらされる。1つの列のスロット5132は、隣接する列のスロット5132の間に配置される。
【0075】
ステープルカートリッジ513の各区分513aは、横切る分割ライン513bによって互いから軸方向に分離される。横切る分割ライン513bは、ステープルカートリッジ513にわたり横切って延び、ステープルスロット5132をわたり延びない。換言すると、横切る横断ライン513bは、軸方向に隣接するスロット5132の間に延びる。さらに、各区分513aは、隣接するスロットの列の各々からの単一のスロット5132を含むためのサイズとされている。しかし、各スロットの列からの1つより多くのスロット5132が各区分513a内に配置され得ることが予期される。
【0076】
引き続き図14〜16を参照すると、エンドエフェクタ500は、圧力感知フィルム526をさらに含む。圧力感知フィルム526は、ステープルカートリッジ513とハウジングフレーム506の側面5062、5065との間に置かれる。特に、圧力感知フィルム526は、複数の個々の圧力感知フィルム区分526aを含み、圧力感知フィルム区分526aは、各々、ステープルカートリッジ513のそれぞれの区分513aとハウジングフレーム506の側面5062、5065との間に置かれる。
【0077】
図13においてみられるように、ステープルカートリッジ513の各区分513aは、それぞれの圧力感知フィルム区分526aの上に、圧縮ばねの形態のそれぞれの付勢部材513cを介して浮遊している。特に、付勢部材513cは、ステープルカートリッジ513のそれぞれの区分513aとエンドエフェクタ500の推力プレート502(図13および図16参照)との間に置かれる。このようにして、利用において、ステープルカートリッジ513の組織接触表面からアンビル505の組織接触表面までのギャップまたは距離が第一のジョー580と第二のジョー550との間にクランプされた組織の厚さに応じて調節または変わり得る。
【0078】
本開示に従って、エンドエフェクタ500のステープルカートリッジ513は、インテリジェント外科手術デバイス、上で説明された器具または装置100に連結された場合か、または2002年3月8日に出願された、名称が「Surgical Device」の米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)(この全内容は、本明細書において参照することによって援用される)において示され、説明される電気機械ドライバーシステムに連結された場合、第一のジョー580と第二のジョー550との間にクランプされた組織のセクションに存在する異なる厚さを収容するように調節する能力を有する。
【0079】
各圧力感知フィルム区分526aは、ステープルカートリッジ513の各区分513aに、第一のジョー580および第二のジョー550のクランプまたは接近中および/またはエンドエフェクタ500の発射中に及ぼされた力を感知する能力を有する。ステープルカートリッジ513の各区分513aは、付勢部材513cによって、非装填コンディションまたは非クランプコンディション中に予め設定された高さまで装填されたばねである。
【0080】
各圧力感知フィルム区分526aは、コントローラー120と電気通信し得る(図2参照)。このようにして、圧力感知フィルム区分526aによって感知された信号は、処理および/または分析のためにコントローラー120に送信され得、処理および/分析され得る。
【0081】
動作において、第一のジョー580および第二のジョー550のクランプまたは接近(つまり、クランプし切る)すると、ステープルカートリッジ513の各区分513aは、ステープルカートリッジ513の各セクション513aに及ぼされた力に応じた量だけ組織によって個々に圧縮される(つまり、それぞれの圧力感知フィルム区分526aに対して加圧される)。ステープルカートリッジ513の各区分513aの浮遊性質に起因して、各区分513aは、左右または側方方向および/または長手方向にわずかに動く能力を有する。
【0082】
ある実施形態において、圧力感知フィルム区分は、コントローラーに接続され、データは、メモリユニットに格納されるか、および/または他の構成要素に送信される。コントローラーのメモリユニット(リモートユニットであり得るか、またはシャフトおよびエフェクタに取り付けられた電力器具ハンドルに組み込まれ得る)は、エンドエフェクタおよび器具全体の動作のための所望のパラメータまたは範囲に関するデータを含む。例えば、ステープルカートリッジ513の各区分513aに及ぼされる力は、圧力感知フィルム区分526aによって、上で説明された圧力応答要素150に実質的に類似する態様で決定される。圧力感知フィルム区分526aによって決定、検知または測定された力は、外科手術デバイスなど(示されていない)上に提供されたモニター、ディスプレイ上に表示され得る。モニターは、ステープルカートリッジ513の各個々の区分513aに及ぼされた力およびステープルカートリッジ513の全長さに及ぼされた全体の力を表示することが予期される。
【0083】
圧力感知フィルム区分によって測定された力は、時間にわたり監視され得る。換言すると、ステープルが噴出され、アンビルに対して形成されるにつれ、力がどのように変わるかが監視され得、コントローラーに送信され得、他の構成要素に送信され得、コントローラーのメモリユニットに格納され得、ステープル形成および/または外科医に情報を提供するためか、または器具の動作に影響させるために用いられるステープルに対する所望のプロファイルに関するデータと比較され得る。
【0084】
用いられ得る圧力センサーは、抵抗、コンダクタンス、インピーダンスおよび静電容量のうちの1つ以上の差異を測定または監視する電気回路を含むが、それに限定されない。センサーは、1つ以上のラミネートされた抵抗のある基板または伝導性基板の層を組み込み得る。他のセンサーが予期される。
【0085】
本開示に従って、上で説明されたインテリジェント外科手術デバイス、器具または装置100または米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)において示され、説明される電気機械ドライバーシステムは、力の大きさを解釈する能力を有し、コンディションが第一のジョー580および第二のジョー550をクランプ/接近させ続けるために許容可能か否か、またはコンディションがエンドエフェクタ500の発射のために許容可能か否かを決定する能力を有する。
【0086】
さらに、本開示に従って、上で説明されたインテリジェント外科手術デバイス、器具または装置100または米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)において示され、説明される電気機械ドライバーシステムは、障害が第一のジョー580と第二のジョー550との間にクランプされた組織に存在するか否か、およびコンディションがエンドエフェクタ500の発射のために、ステープルカートリッジ513に及ぼされた負荷および/または力に基づいて許容可能か否かを決定する能力を有する。
【0087】
そのため、ステープルカートリッジ513およびその区分513aの浮遊またはばね付勢性質を考慮すると、ステープルカートリッジ513の調節または収容は、一貫性のない厚さおよび障害を有する組織においてより寛大であるか、および/またはそれらは減らされる。さらに、ステープルカートリッジ513の力感知能力は、外科医に、第一のジョー580および第二のジョー550のクランプ/接近中か、および/またはエンドエフェクタ500の発射中に、組織の各部分または区分が晒される圧縮力の量の示しを提供し得る。また、ステープルカートリッジ513は区分され、ステープルカートリッジ513の全長さに沿って配置された複数の圧力感知フィルム区分526aがあるので、外科医は、第一のジョー580と第二のジョー550との間にクランプされた組織における障害の存在に関する情報およびステープルカートリッジ513の長さに沿った障害の場所の示しを提供され得る。
【0088】
外科医に、ステープルカートリッジ513の長さに沿った障害の場所の示しを提供することによって、外科医は、ステープリング手続きまたは発射手続き中に障害にぶつかることを避けるために、必要に応じてエンドエフェクタ500を組織の別の場所またはセクションに動かし得る。
【0089】
動作において、ステープルカートリッジ513の特定の区分513aに及ぼされた力が所定の閾値を超えるか、および/またはステープルカートリッジ513に及ぼされた平均力が所定の閾値を超えた場合、コントローラーは、エラーを登録し得、エラーコードを出すことか、警告を出すことか、および/または発射手続きを停止することかを行うように構成され得る。
【0090】
開示の複数の例示的実施形態が図面において示されたが、開示がそれらに限定されることは意図しておらず、開示は、当分野が許容する限り範囲が広くあることが意図され、明細書も同様に読まれることが意図される。そのため、上の説明は、限定的と解釈されるべきでなく、単なる好ましい実施形態の例示として解釈されるべきである。したがって、実施形態の範囲は、付与された例によってよりも、むしろ添付の特許請求の範囲およびそれらの法的均等物によって決定されるべきである。
【符号の説明】
【0091】
100 電力外科手術ステープリング装置
102 ハウジング
104 細長い部材
106 エンドエフェクタ
108、110 ジョー
136 アクチュエータ
200 手動の外科手術ステープリング装置
【技術分野】
【0001】
(関連出願の相互参照)
本願は、2009年8月11日に出願された米国仮特許出願第61/232,826号の利益および優先権を主張する、2010年6月8日に出願された米国特許出願第12/796,270号の利益および優先権を主張する、2011年2月1日に出願された米国特許出願第13/018,467号の利益および優先権を主張する一部継続出願である。それらの各々の全内容は、本明細書において参照することによって援用される。
【0002】
(背景)
(1.技術分野)
本開示は、ファスナーのラインを組織に適用し、それらファスナーのラインの間の組織を切断する能力を有する外科手術ステープリング装置に関する。より具体的には、ファスナー配備および形成に関する改善に関する。
【背景技術】
【0003】
(2.関連技術の背景)
内視鏡および腹腔鏡外科手術装置は、しばしば伝統的な開放外科手術デバイスよりも好まれる。なぜなら、より小さい切開は、術後回復時間および合併症を減少させる傾向があるからである。腹腔鏡および内視鏡外科手術処置の使用は、比較的人気があり、処置をより発展させるさらなる動機を提供してきた。腹腔鏡処置において、外科手術は、小さな切開を通して腹の内部において実行される。同様に、内視鏡処置において、外科手術は、皮膚における小さい入口創傷を通して挿入された細い内視鏡管によって身体の任意の空洞な内臓において実行される。
【0004】
腹腔鏡および内視鏡処置は、外科手術領域にガス注入することを一般的に要求する。そのため、身体内へ挿入された任意の器具類は、切開を通してガスが身体に流入しないか、または流出しないことを確実にするために、密閉されなければならない。さらに、腹腔鏡および内視鏡処置は、しばしば外科医に切開から遠く離れた器官、組織および/または血管にアクセスすることを要求する。したがって、そのような処置において用いられる装置は、一般的に長く、細く、装置の近位端部から機能的に制御可能である。
【0005】
重要な発展は、トロカールのカニューレを通して、遠位エンドエフェクタを所望の外科手術部位に正確に設置するために適切である内視鏡外科手術装置の範囲にたどり着いている。これらの遠位エンドエフェクタは、組織を数多くの方法によって係合し、診断または治療効果(例えば、エンドカッター、把持器、カッター、ステープラー、クリップアプライヤー、アクセスデバイス、薬物/遺伝子療法送達デバイスおよび超音波、RF、レーザーなどを用いたエネルギーデバイス)を達成する。
【0006】
公知の外科手術ステープリング装置は、組織に長手方向切開を作り、続いてファスナーのラインを切開の対向する側面上に適用するエンドエフェクタを含む。エンドエフェクタは、一対の協働ジョーを含み、装置が内視鏡または腹腔鏡用途として意図された場合、ジョーは、カニューレ通路を通過する能力を有する。ジョーのうちの1つは、側方に一定の距離を置かれた少なくとも2つのファスナーの列を有するファスナーカートリッジを受容する。他のジョーは、カートリッジにおけるファスナーの列と一列に並べられたファスナー形成ポケットを有するアンビルを形成する。装置は、複数のレシプロウェッジまたはカムバーを含み、それらは、遠位へ駆動された場合、ファスナーカートリッジにおける開口部を通過し、ファスナーを支持するドライバーを係合することによってアンビルへのファスナーの発射をもたらす。
【0007】
さまざまなタイプの小さなビデオスコープ(例えば、内視鏡)は、外科手術ステープリング装置の適切な位置決めおよび動作を監視するために利用され得る。ある程度効果的であるが、外科手術ステープリング装置の動作を監視することを改善したことは望ましい。複数のファスナーを各カートリッジ装填に含むステープリングデバイスを利用した場合、どのファスナーが配備されているか、それらは、適切に形成されているか否かを決定することも有益である。
【発明の概要】
【発明が解決しようとする課題】
【0008】
結果として、外科手術ステープリングデバイスの機械的および止血の完全性を確実にするために、能力を監視しつつ、ファスナー配備および形成圧力を組み込む改善された外科手術ステープリングおよび切断装置に対する継続した必要性が存在する。
【課題を解決するための手段】
【0009】
(概要)
本開示に従って、外科手術ステープリング装置が開示される。外科手術ステープリング装置は、ハウジングと、細長い部材と、エンドエフェクタと、複数のファスナーと、複数の推進器部材と、作動機構と、圧力応答要素とを有する。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の1つの端部上に配置される。エンドエフェクタは、第一および第二のジョーを含む。複数のファスナーは、エンドエフェクタに配置される。複数の推進器部材は、エンドエフェクタに設けられる。複数の推進器部材における各推進器部材は、数多くのファスナーに動作可能に連結される。作動機構は、アクチュエータに動作可能に連結される。作動機構は、長手方向に並進可能な駆動部材および駆動部材に連結された作動スレッドを含む。作動スレッドは、複数の推進器部材を係合するように構成されている。圧力応答要素は、ジョーのうちの1つに配置される。圧力応答要素は、信号を外科手術ステープリング装置に連結されたコントローラーに通信する。信号は、圧力応答要素に印加された圧力を表す。
【0010】
一実施形態において、作動スレッドと推進器部材との間の相互作用は、圧力を圧力応答要素に印加する。圧力応答要素は、ずらされた圧力センサーを回路において含む。回路は、いくつかの発現形態において、ジョーのうちの1つに位置決めされたチャネルの表面上に配置されたプリント圧力回路または可撓性回路である。
【0011】
別の実施形態において、外科手術ステープリング装置は、ジョーのうちの少なくとも1つの外側表面上に配置される回路を含み得る。この型において、ステープリング装置は、また、ビームを含む。ビームは、ジョーのうちの少なくとも1つの外側表面上に配置され、ジョーのうちの少なくとも1つ内に配置された溝に据え付けられ、ビームは、溝に沿って並進するように構成され得る。ビームは、IビームまたはEビームであり得る。
【0012】
回路は、ラミネート層を回路上に有し得、ラミネート層上に潤滑なコーティングをも有し得る。コントローラーに通信された信号は、コントローラーによって不規則として読まれることがある。そのような場合、コントローラーは、エラーコード、警告のようなフィードバック応答を作動させるか、またはコントローラーは、ファスナー配備を完全に停止をもさせ得る。圧力応答要素は、信号を、電圧、抵抗、インピーダンス、電磁気、高周波、電流、インダクタンス、静電容量、赤外線、光学のうちのいずれか、またはそれらの任意の組み合わせによってコントローラーに通信することが予期される。
【0013】
別の実施形態は、ジョーを通り並進するように構成されることによって、組織を切断するナイフを予想する。しかし、ある所定の不規則の際、それらの不規則がそれらの所定のコンディションに一致する場合、コントローラーは、ナイフが切断することを妨げ得る。エンコーダは、印加された圧力に対して不規則な構成要素位置を認識することと、信号をコントローラーに送ることとを行うように構成されている。エンコーダは、作動機構、ナイフ、アクチュエータ、作動スレッド、推進器部材、第一のジョー、第二のジョーまたはそれらのさまざまな組み合わせをも含むさまざまな構成要素の不規則な位置を認識するように構成され得る。これらのエンコーダは、線形であり得るか、または回転し得る。
【0014】
ある実施形態は、カートリッジ識別特徴を含む回路を予期する。他の実施形態は、特定の装填またはファスナータイプに対して位置限定およびランモードを設定するように構成されているコントローラーを有し得る。さらに、ジョーのうちの1つは、非線形カートリッジを収納するような構成および寸法とされ得る。
【0015】
他の実施形態において、コントローラーは、エンドユーザーフィードバック通信特徴を含む。エンドユーザーフィードバック通信特徴は、フィードバックをエンドユーザーに、聴覚、視覚、触覚またはそれらの任意の組み合わせのような知覚信号によって通信するように構成されている。
【0016】
本開示の別の局面に従って、外科手術ステープリング装置が提供され、ハウジングと、細長い部材と、エンドエフェクタと、第一の区分および第二の区分の各々に対する付勢部材と、第一の区分および第二の区分の各々に対する圧力センサーとを含む。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の端部上に配置される。エンドエフェクタは、第一のジョーおよび第二のジョーを有する。第一のジョーは、ステープルカートリッジを有する。第二のジョーは、複数のステープル形成くぼみを有する。ステープルカートリッジは、少なくとも第一の区分および第二の区分を有する。第一の区分および第二の区分は、各々、組織接触表面およびステープル受容スロットを有する。ステープル受容スロットは、組織接触表面に規定される。第一の区分および第二の区分は、第二のジョーの方へ付勢されており、可動である。
【0017】
外科手術ステープリング装置は、いつ圧力が閾値の上にあるかを決定する構成要素をさらに含み得る。
【0018】
外科手術ステープリング装置は、アクチュエータに動作可能に接続されたモーターをさらに含み得る。モーターは、ハウジングにあり得る。
【0019】
外科手術ステープリング装置は、電源をハウジングにおいてさらに含み得、電源は、モーターに動作可能に接続される。
【0020】
構成要素は、モーターを停止するようにプログラムされ得る。
【0021】
ステープル形成くぼみおよびステープル受容スロットは、線形な列を規定し得る。線形な列は、細長い部材の長手方向軸に対して横切って延び得る。ステープル形成くぼみおよびステープル受容スロットは、エンドエフェクタの長手方向軸に対して角度を規定し得る。
【0022】
本開示のさらなる局面に従って、外科手術装置に選択的に接続するエンドエフェクタが提供され、第一のジョーと、ステープルカートリッジと、第二のジョーと、圧力感知要素とを含む。ステープルカートリッジは、第一のジョー上で支持される。ステープルカートリッジは、組織接触表面を規定する。ステープルカートリッジは、複数の独立した別個に可動な区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される。第二のジョーは、第一のジョーに接続される。第二のジョーは、アンビルを支持する。アンビルは、複数のステープル形成くぼみを規定する。複数のステープル形成くぼみは、ステープルカートリッジの複数のステープル保持スロットに応じて並列される。圧力感知要素は、各ステープルカートリッジと第一のジョーとの間に置かれる。各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する。
【0023】
エンドエフェクタは、各ステープルカートリッジ区分と第一のジョーとの間に置かれた付勢部材をさらに含み得る。付勢部材は、各ステープルカートリッジ区分を第一のジョーから一定の距離を置かれた距離に維持し得る。
【0024】
ステープルカートリッジは、ステープル保持スロットの少なくとも2つの平行な列を規定し得る。ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分において提供され得る。
【0025】
付勢部材は、力がステープルカートリッジ区分のいずれかの組織接触表面に及ぼされると、圧縮し得る。
【0026】
本開示のさらに別の局面に従って、電気外科ステープリングシステムが提供され、電力外科手術装置およびエンドエフェクタを含む。電力外科手術装置は、ハンドル部分を含む。ハンドル部分は、外科手術ステープリングエンドエフェクタをハンドル部分に解除可能に接続するように構成および適合されている。ハンドル部分は、アクチュエータと、モーターと、電源とコントローラーとを含む。アクチュエータは、エンドエフェクタに接続し、エンドエフェクタを駆動させる。モーターは、アクチュエータを駆動させる。電源は、モーターに電力供給する。コントローラーは、電源およびモーターの少なくとも1つを制御する。エンドエフェクタは、電力外科手術装置のハンドル部分に選択的に接続するように構成されている。エンドエフェクタは、第一のジョーと、ステープルカートリッジと、第二のジョーと、圧力感知要素とを含む。ステープルカートリッジは、第一のジョー上で支持される。ステープルカートリッジは、組織接触表面を規定する。ステープルカートリッジは、複数の独立した別個に可動な区分に分割される。少なくとも1つのステープル保持スロットは、各区分において規定される。第二のジョーは、第一のジョーに接続される。第二のジョーは、アンビルを支持する。アンビルは、複数のステープル形成くぼみを規定する。複数のステープル形成くぼみは、ステープルカートリッジの複数のステープル保持スロットに応じて並列される。圧力感知要素は、各ステープルカートリッジ区分と第一のジョーとの間に置かれる。各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する。各圧力感知要素は、コントローラーと電気通信する。コントローラーは、ステープルカートリッジ区分の少なくとも1つに及ぼされ、それぞれの圧力感知要素によって感知された力が所定の閾値力を超えた場合、第一のジョーの接近と電力外科手術装置の発射とのうちの少なくとも1つを停止させる。
【0027】
エンドエフェクタは、各ステープルカートリッジ区分と第一のジョーとの間に置かれた付勢部材をさらに含み得る。付勢部材は、各ステープルカートリッジ区分を第一のジョーから一定の距離を置いた距離に維持し得る。
【0028】
エンドエフェクタのステープルカートリッジは、ステープル保持スロットの少なくとも2つの列を規定し得る。ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分において提供され得る。
【0029】
エンドエフェクタの付勢部材は、力がステープルカートリッジ区分のいずれかの組織接触表面に及ぼされると、圧縮し得る。
【0030】
エンドエフェクタの第一のジョーおよび第二のジョーは、平行な接近のために構成され得る。
【0031】
例えば、本発明は、以下の項目を提供する。
(項目1)
外科手術ステープリング装置であって、
アクチュエータを有するハウジングと、
該ハウジングから延びる細長い部材と、
該細長い部材の端部上に配置されたエンドエフェクタであって、該エンドエフェクタは、第一のジョーと第二のジョーとを有し、該第一のジョーは、ステープルカートリッジを有し、該第二のジョーは、複数のステープル形成くぼみを有し、該ステープルカートリッジは、少なくとも第一の区分と第二の区分とを有し、該第一の区分および該第二の区分は、各々、組織接触表面およびステープル受容スロットを有し、該ステープル受容スロットは、該組織接触表面において規定され、該第一の区分および該第二の区分は、該第二のジョーの方へ付勢され、かつ、可動である、エンドエフェクタと、
該第一の区分および該第二の区分の各々のための付勢部材と、
該第一の区分および該第二の区分の各々のための圧力センサーと
を含む、外科手術ステープリング装置。
(項目2)
圧力が閾値を超えている場合を決定する構成要素をさらに含む、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目3)
アクチュエータに動作可能に接続されたモーターをさらに含む、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目4)
上記モーターは、上記ハウジングにある、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目5)
電源を上記ハウジング内にさらに含み、該電源は、上記モーターに動作可能に接続される、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目6)
上記構成要素は、上記モーターを停止するようにプログラムされている、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目7)
上記ステープル形成くぼみおよび上記ステープル受容スロットは、直線状の列を規定する、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目8)
上記直線状の列は、上記細長い部材の長手方向軸に対して横切って延びる、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目9)
上記ステープル形成くぼみおよび上記ステープル受容スロットは、上記エンドエフェクタの長手方向軸に対して角度を規定する、上記項目のいずれかに記載の外科手術ステープリング装置。
(項目10)
外科手術装置に選択的に接続するエンドエフェクタであって、
該エンドエフェクタは、
第一のジョーと、
該第一のジョー上に支持されるステープルカートリッジであって、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に可動な区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、該複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して並列される、第二のジョーと、
圧力感知要素であって、該圧力感知要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタ。
(項目11)
付勢部材であって、該付勢部材は、各ステープルカートリッジ区分と上記第一のジョーとの間に置かれる、付勢部材をさらに含み、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置いた距離に維持する、上記項目のいずれかに記載のエンドエフェクタ。
(項目12)
上記ステープルカートリッジは、ステープル保持スロットの少なくとも2つの平行な列を規定し、ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分に提供される、上記項目のいずれかに記載のエンドエフェクタ。
(項目13)
上記付勢部材は、力が上記ステープルカートリッジ区分のいずれかの上記組織接触表面に及ぼされると、圧縮する、上記項目のいずれかに記載のエンドエフェクタ。
(項目14)
電気外科ステープリングシステムであって、
該電気外科ステープリングシステムは、
電力外科手術装置であって、該電力外科手術装置は、
ハンドル部分であって、該ハンドル部分は、解除可能に外科手術ステープリングエンドエフェクタを該ハンドル部分に接続するように構成および適合されており、該ハンドル部分は、アクチュエータ、モーター、電源およびコントローラーを含み、該アクチュエータは、該エンドエフェクタに接続し、該アクチュエータは、該エンドエフェクタを駆動させ、該モーターは、該アクチュエータを駆動させ、該電源は、該モーターに電力供給し、該コントローラーは、該電源および該モーターのうちの少なくとも1つを制御する、ハンドル部分と、
エンドエフェクタであって、該エンドエフェクタは、該電力外科手術装置の該ハンドル部分への選択的接続のために構成されており、該エンドエフェクタは、
第一のジョーと、
ステープルカートリッジであって、該ステープルカートリッジは、該第一のジョー上で支持されており、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に稼動名区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して配列される、第二のジョーと、
圧力感知要素であって、該圧力監視要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分におよぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタと、
を含む、電力外科手術装置を含み、
各圧力感知要素は、該コントローラーと電気通信しており、
該コントローラーは、該第一のジョーおよび該第二のジョーの接近と、該電力外科手術装置の発射とのうちの少なくとも1つを、該ステープルカートリッジ区分のうちの少なくとも1つに及ぼされ、該それぞれの圧力感知要素によって感知された力が所定の閾値力を超えた場合に停止する、電気外科ステープリングシステム。
(項目15)
上記エンドエフェクタは、付勢部材をさらに含み、該付勢部材は、各ステープリングカートリッジ区分と上記第一のジョーとの間に置かれ、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置かれた距離に維持する、上記項目のいずれかに記載の電気外科ステープリングシステム。
【0032】
(摘要)
外科手術ステープリング装置が提供され、ハウジングと、細長い部材と、エンドエフェクタと、第一の区分および第二の区分の各々に対する付勢部材と、第一の区分および第二の区分の各々に対する圧力センサーとを含む。ハウジングは、アクチュエータを有する。細長い部材は、ハウジングから延びる。エンドエフェクタは、細長い部材の端部上に配置される。エンドエフェクタは、第一のジョーおよび第二のジョーを有する。第一のジョーは、ステープルカートリッジを有する。第二のジョーは、複数のステープル形成くぼみを有する。ステープルカートリッジは、少なくとも第一の区分および第二の区分を有する。第一の区分および第二の区分は、各々、組織接触表面およびステープル受容スロットを有する。ステープル受容スロットは、組織接触表面において規定される。第一の区分および第二の区分は、第二のジョーの方へ付勢され、可動である。
【0033】
本開示の上および他の局面、特徴および利点は、添付の図面に関連してみられた場合、以下の詳細な説明に照らすと、より明らかとなる。
【図面の簡単な説明】
【0034】
【図1A】図1Aは、電力外科手術ステープリング装置の透視図である。
【図1B】図1Bは、手動外科手術ステープリング装置の透視図である。
【図1C】図1Cは、外科手術ステープリング装置のエンドエフェクタの拡大透視図である。
【図1D】図1Dは、ウェッジがカートリッジを通り並進することによって、続けてファスナーをカートリッジから噴出し、ファスナーをジョーのうちの1つに対して駆動させ、それによってファスナーが形成される、ファスナー適用動作中のエンドエフェクタの透視図である。
【図2】図2は、本開示に従う外科手術ステープリングシステムの概略図である。
【図3A】図3Aは、図1Aおよび図1Bの外科手術ステープリング装置のエンドエフェクタの一部の側面断面図である。
【図3B】図3Bは、明確になるように、カートリッジの壁が取り外された、図1Aおよび図1Bの外科手術ステープリング装置のエンドエフェクタの一部の側面断面図である。
【図4A】図4Aは、作動機構を例示するためにハウジングを区切った、アクチュエータが1つの作動ストロークによって操作され、ファスナーの一部をカートリッジから組織に適用する場合の図1Bの外科手術ステープリング装置の側面立面図である。
【図4B】図4Bは、本開示に従う図4Aの外科手術ステープリング装置の部分的な断面における透視図である。
【図5】図5は、ステープル対時間を形成するために印加された圧力の図表である。
【図6】図6は、カートリッジにプリント圧力回路が配置されたカートリッジの内部チャネルの透視図である。
【図7】図7は、ジョーのうちの1つにおけるナイフスロットを例示する図1Aおよび図1Bの可動エンドエフェクタの透視図である。
【図8A】図8Aは、明確になるように、アンビルカバーを取り外され、圧力回路を示す図7のエンドエフェクタの透視図である。
【図8B】図8Bは、図8Aにおいて開示される実施形態の拡大透視図である。
【図9】図9は、本開示の一実施形態に従うエンドユーザーフィードバック通信特徴の概略図である。
【図10】図10は、本開示の一実施形態に従うカートリッジ識別特徴の概略図である。
【図11】図11は、本開示の一実施形態に従うエンコーダ特徴の概略である。
【図12】図12は、本開示の別の実施形態に従う電力外科手術ステープリング装置としての外科手術デバイスまたはエンドエフェクタの透視図である。
【図13】図13は、図12の外科手術デバイスまたはエンドエフェクタの分解組み立て図である。
【図14】図14は、図12の外科手術デバイスまたはエンドエフェクタのステープルカートリッジフレームハウジングにおいて支持されたステープルガイドを例示する拡大透視図である。
【図15】図15は、図12の外科手術デバイスまたはエンドエフェクタのステープルガイドの拡大透視図である。
【図16】図16は、図12の16−16を通して取られた、図12の外科手術デバイスまたはエンドエフェクタの断面図である。
【発明を実施するための形態】
【0035】
(実施形態の詳細な説明)
本開示の外科手術ステープリング装置の実施形態がここで図面を参照して詳細に説明される。類似の参照数字は、複数の図の各々において、同一または対応する要素を指す。
【0036】
図面において示され、以下の説明を通して説明され、対象物上への相対的な位置決めを参照した場合、伝統であるように、用語「近位」は、ユーザーにより近い装置の端部を指し、用語「遠位」は、ユーザーからより遠い装置の端部を指す。以下の説明において、周知の機能または構造は、本開示を不必要な詳細で不鮮明にすることを避けるため、詳細には説明されない。
【0037】
図1Aは、全体が100として示される電力外科手術ステープリング装置を例示する。図1Bは、全体が200として示される手動の外科手術ステープリング装置を例示する。簡潔には、外科手術ステープリング装置100、200は、アクチュエータ136を有するハウジング102と、ハウジング102から延びる細長い部材104と、細長い部材104のうちの1つの端部上に配置されたエンドエフェクタ106とを含む。図1C〜1Dから、エンドエフェクタ106は、第一および第二のジョー108、110と、エンドエフェクタ106に配置された複数のファスナー114と、エンドエフェクタ106に設けられた複数の推進器部材130とを含む。複数の推進器部材130の各推進器部材130は、動作可能にファスナー114の部材に連結される。図3A〜4Bにおいてみられるように、外科手術ステープリング装置100、200は、動作可能にアクチュエータ136に連結された作動機構138を含む。作動機構138は、長手方向に並進可能な駆動部材140と、それに連結された作動スレッド132とを含む。作動スレッド132は、複数の推進器部材130を係合するために構成されている。
【0038】
本開示の一実施形態に従って、図2の図において、外科手術ステープリングシステムは、外科手術ステープリング装置100、200を有する。外科手術ステープリング装置100、200は、圧力応答要素150およびコントローラー120を有する。圧力応答要素は、ジョー108、110(図3A〜3Bおよび8A〜8B)のうちの1つに配置されることが予想される。圧力応答要素150は、圧力信号152(示されていない)を外科手術ステープリング装置100、200に連結されたコントローラー120に通信し得る。コントローラー120は、制御、位置決め、状態およびファスナー114の質フィードバックを可能にするマイクロコントローラーまたはアナログ回路である。圧力信号152は、圧力応答要素150に印加された圧力を表す。この実施形態は、ナイフ164を含み得るか、または含まない場合があることが予想され、ナイフ164は、ナイフスロット174(図1C)を通り、スライドするように並進可能である。
【0039】
図5を参照すると、印加された圧力が、時間対印加された圧力グラフにおいてみられるように、波形拍動の形態で測定され得る。例えば、通常のサンプルは、0〜t1の期間を含むグラフに従って読まれ得る。あるサンプリング中、波形拍動が、低い(t2〜t3)または高い(t1〜t2)圧力を示した場合、このことは、不適切な印加された圧力配分に起因して、ファスナー114が適切に配備または形成されていないことの示しであり得る。印加された圧力配分は、適切なファスナー114の配備または形成のために必要である。あるいは、波形が成功したテスト波形(t3〜t4)に相関された形状に波形がない場合、エラーコードまたはフィードバックがコントローラー120によって初期化され、配備または形成連続を停止する。このことは、先に進むか、またはバックアウトする前に、性能不規則性を適切に理解する能力をユーザーに付与する。
【0040】
図3A〜3Bにおいてみられるように、第一のジョー108は、カートリッジ112を受容するカートリッジチャネル128を含む。カートリッジ112は、その中に配置された複数のファスナー114を含む。一般的に、ファスナー114は、複数の外科手術ステープルの形態である。カートリッジ112は、複数の線形な列のファスナー114を収容し、ファスナーは、動作可能に推進器部材130に連結される。
【0041】
ここで図6を参照すると、一発現形態の圧力応答要素150は回路124を含み、少なくとも1つのリード154は、少なくとも1つの圧力センサー126を接続する。複数の圧力センサー126が外科手術ステープリング装置100、200上に配置されることも予期される。一例において、リード154は、複数の圧力センサー126にわたり、長手方向軸に沿って線形な連続に延びる。少なくとも1つの圧力センサー126は、各ファスナー114または推進器部材130に対応する。ファスナー114の各線形な列および/または推進器部材130は、少なくとも1つのリード154によって接続される。少なくとも1つのリード154は、線形な列に沿って延び、回路124の長手方向軸に沿って延びる。回路124は、可撓性またはプリント圧力回路124である。
【0042】
この実施形態において、回路124は、カートリッジチャネル128の(作業)上面に接着され、回路124は、回路124を通り並進する作動スレッド132と相互作用し得る。換言すると、回路124は、カートリッジチャネル128内に配置されることによって、作動スレッド132がカートリッジチャネル128を通り並進した場合、作動スレッド132を嵌合するように係合する(図3A〜3B)。
【0043】
図7〜8Bは、外科手術ステープリング装置100、200の別の実施形態を示す。図8A〜8Bにおいてみられるように、外科手術ステープリング装置100、200は、圧力応答要素150を含む。圧力応答要素150は、回路124を含み、回路124は、ジョー108、110のうちの少なくとも1つの外側表面上に配置される。好ましくは、回路124は、第二のジョー110の外側表面上に配置される。この実施形態は、ビーム162を含む。ビーム162は、ジョー108、110のうちの少なくとも1つの外側表面上に配置される。好ましくは、ビーム162は、第二のジョー110の外側表面上に配置される。ビーム162が溝116にスライドするように据え付けられることも予期される。溝116は、ジョー108、110のうちの少なくとも1つ内に配置され、作動スレッド132に接続される(図8Aおよび8B)。ビーム162は、第二のジョー110内に配置された溝116にスライドするように据え付けられる。ビーム162は、溝116に沿って並進するように構成されている。ビームは、IビームまたはEビームである。この回路112は、外科手術ステープリング装置100、200に対して非常に薄いことが予想され、カートリッジ112の全体のサイズまたは機能を損なわせないか、または大きく影響しない少なくとも幾何学的に十分薄い寸法を有する。
【0044】
いくつかの発現形態において、圧力センサー126がずらされる(図3B、6、8A、8B)。一配列における回路124がずらされ、詳細な情報が各ファスナー114またはファスナー114のグループに対して得られ得るように最適化される。各ファスナー114またはファスナー114のグループは、それらの関連付けられた推進器部材130によって形成される。圧力センサー126を近位から遠位位置にファスナー114に対して外科手術ステープリング装置100、200内でずらすことによって、外科手術ステープリング装置100、200は、各ファスナー114の配備タイミングおよび完了を決定するように構成され得る。このことは、外科手術ステープリング装置100、200をコントローラー120によって制御するために価値があり、クランプする各特定のカートリッジ112の限界、遠位停止または定位置を立証する。コントローラー120は、アナログまたはミクロ電子回路を有し得る。
【0045】
ファスナー114連続が展開すると、圧力応答要素150は、圧力信号152をコントローラー120に、電圧、抵抗、インピーダンス、電磁気、高周波、電流、インダクタンス、静電容量、赤外線および光学を含むグループから選択された少なくとも1つの通信手段によって通信する。動作において、圧力応答要素150は、ファスナー114が連続して配備および形成された場合(図5)、印加された圧力をたどる。いくつかの場合において、印加された圧力は、波長拍動の形態でたどられ得る。コントローラー120が圧力応答要素150から通信された圧力信号152によって表される不規則な圧力パターンを認識した場合、コントローラー120は、それに応じて、エラーを登録し、エラーコードを出すことか、警告を出すことか、ファスナー114形成を停止することか、またはファスナー114配備を停止することさえ行うように構成され得る。
【0046】
圧力応答要素150は、また、線形なカートリッジ112構成と非線形なカートリッジ112構成との両方のために構成され得る。ジョー108、110のうちの少なくとも1つ(好ましくは、第一のジョー108)が非線形なカートリッジを含むことが予想される。換言すると、圧力応答要素150は、線形なカートリッジ112外科手術ステープリング装置100、200または非線形なカートリッジ112外科手術ステープリング装置100、200(ファスナー質または連続状態を評価するために要求される湾曲したか、円形か、または任意の他の幾何学的形状にされたカートリッジ112を含む)として用いられ得る。
【0047】
しばしば、外科手術ステープリング装置100、200は、ナイフ164を含み得る。本開示の一発現形態において、外科手術ステープリング装置100、200は、コントローラー120がナイフ164が切断することを妨げるように構成および寸法とされている。換言すると、コントローラー120は、エンコーダ166(つまり、ナイフ切断妨害特徴)を含む。図11においてみられるように、一構成は、外科手術ステープリング装置100、200の不規則な動作を認識するように構成されているエンコーダ166を予期する。いくつかの例において、エンコーダ166は、印加された圧力に対して構成要素の位置を認識するような構成および寸法とされている。構成要素は、作動機構138、ナイフ164、アクチュエータ136、作動スレッド132、推進器部材130、第一のジョー108および第二のジョー110またはそれらの任意の組み合わせを含むグループから選択される。エンコーダ166は、回転可能であり得るか、または線形でさえあり得る。
【0048】
図9を参照すると、いくつかの発現形態において、コントローラー120は、エンドユーザーフィードバック通信特徴170を含む。エンドユーザーフィードバック通信特徴170は、信号152、191を、聴覚(ベル、発話、ブザー、ビープ音など)、視覚(光、LED、LCDまたはさまざまな色のエレクトロルミネッセンススクリーン、テクストおよび/またはシンボル)および触覚(振動)を含むグループから選択された少なくとも1つの手段によって受信および解読した後、エンドユーザーにフィードバックを通信するように構成されている。例えば、フィードバックは、ファスナー配備連続の開始、ファスナー配備および形成の完了、個々のファスナー配備、個々のファスナー形成のようなタスク、または当業者によって認識される他の類似タスクの成功した完了または失敗した完了を示すように構成され得る。
【0049】
回路124が裂けることまたは擦れから保護し、正確で反復可能なフィードバックを達成するために、Kapton(登録商標)ポリイミドフィルムまたはチタンの箔または鋼合金またはフラッシュコーティングされたニッケル、クロムまたは窒化物コーティングのような薄く、硬い表面材料が回路124の上部層にラミネートをかぶせ得、ラミネート158を規定する。さらに、潤滑なコーティング160もラミネート層に適用され得る。潤滑なコーティング160は、任意の低摩擦プラスチック、グリース、PTFEブレンド材料または任意の他の同種の潤滑剤であり得る。潤滑剤160は、質出力圧力信号152を達成することに対して有益であり、作業構成要素のエラーの強さを改善することに対して有益である。
【0050】
図10において見られるように、外科手術ステープリング装置100、200は、特徴168を識別するカートリッジを含む回路124を有し得る。特に、圧力応答要素150は、少なくとも1つの回路124を含む。各回路124は、抵抗、インダクタンスの特定電気範囲または値、またはコントローラー120によって読まれ得るインピーダンスを有することによって、識別のために、装填されたカートリッジ112またはエンドエフェクタ106の正確なタイプを決定する。この特徴によって、外科手術ステープリング装置100、200は、カートリッジ112またはファスナー114の特定位置限界および/または運転モードを設定するように構成されているコントローラー120を含む。
【0051】
動作において、エンドユーザー(示されていない)がアクチュエータ136を作動させた場合、作動機構138は、作動スレッド132を推進器部材130に相互作用させる(図4A)。ある変形例において、アクチュエータ136は、作動スレッド132ならびに第一および第二のジョー108、110を作動させる別個の作動特徴を含む。例えば、作動スレッドアクチュエータ136aが作動スレッド132をリモートで作動させるために用いられ、ジョーアクチュエータ136bが第一および第二のジョー108、110を作動させるために用いられる。あるいは、単一のアクチュエータ136が作動スレッド132とジョー108、110との両方を作動させるために用いられる。別の例において、別個のアクチュエータ136は、個々の第一および第二のジョー108、110に接続される。
【0052】
作動させると、作動スレッド132は、推進器部材130を上方へ押し込み、ファスナー114を対向する第二のジョー110表面、特にファスナー形成ポケット156の中に入れる(図1D)。図1Dから、最初の構成において、ファスナー114は、実質的にU形状の構成の形状とされる。完全に形成された構成において、ファスナー114は、実質的にB形状の構成の形状とされる。ファスナー114を第一の構成から第二の構成に変形させる処理において、第二のジョー110は、アンビルとして作用し、ファスナープロング114a、114bがファスナー形成ポケット156を係合するのに応じて、ファスナー114を第二の構成のB形状に圧縮する。そのため、圧力応答要素150に印加されたこの結果の圧力は、作動スレッド132と推進器部材130との間の相互作用の結果である。
【0053】
圧力応答要素150がカートリッジチャネル128内に配置された回路112を含む実施形態において、上方駆動ファスナー114、推進器部材130および作動スレッド132の組み合わせに対する第二のジョー110の下方への力は、結果として、反応力がファスナー114、推進器部材130および作動スレッド132の組み合わせを対向する下方方向ならびに回路112および任意の圧力センサー126に対して通過させる。圧力センサー126は、それに対応して、印加された圧力を登録する。次いで、圧力応答要素150は、圧力信号152をコントローラー120に通信し、コントローラー120において、圧力信号152は、圧力応答要素152に印加された圧力を表す。コントローラー120は、圧力信号152を受信し、圧力信号152に基づいて、応答またはフィードバックを選択的に出す。
【0054】
ある実施形態において、圧力応答要素150は、ジョー108、110のうちの1つの外側表面上に配置された回路112を含む。例えば、回路112が第二のジョー110の外側表面上に配置された場合、両方のビーム162および作動スレッド132が長手方向に第一および第二のジョー108、110に沿って並進すると、印加された圧力は、作動スレッド132に接続されるビーム162から回路112上に置き換えられる。換言すると、作動スレッド132が並進して、推進器部材130を係合した場合、推進器部材130は、ファスナー114を第二のジョー110およびファスナー形成ポケット156の中に上へ駆動させる。このことは、結果として、作動スレッド132がビーム162を結果の下方の反応力により、圧力形成ポケット156から引き降ろさせた場合、下方の反応力をビーム162に回路112上に上に置き換えさせ、ファスナー114および推進器部材130を作動スレッド132上に通過させる。圧力センサー126は、これに応じて、印加された圧力を登録する。次いで、圧力応答要素150は、圧力信号152をコントローラー120に通信し、コントローラー120において、圧力信号152は、圧力応答要素152に印加された圧力を表す。コントローラー120は、圧力信号152を受信し、圧力信号152に基づいて応答またはフィードバックを選択的に出す。
【0055】
エンコーダ166を含む実施形態において、エンコーダ166は、外科手術ステープリング装置100、200の構成要素の不規則な動作を認識するように構成されており、それらの構成要素は、作動機構138、ナイフ164、アクチュエータ136、作動スレッド132、推進器部材130、第一のジョー108および第二のジョー110を含むグループから選択され得る。エンコーダ166がナイフ164の位置を監視するように構成されており、エンコーダ166がナイフ164の不規則な位置を認識する一例において、エンコーダ166は、不規則性をコントローラー120にエンコーダ信号191(規則信号191aまたは不規則信号191bのどちらか一方)を介して通信する。不規則信号191bを受信すると、コントローラー120は、エラーコードを登録し、いくつかの例において、コントローラー120は、ファスナー留めなしの切断を妨げるように構成されている。
【0056】
エンコーダ166は、エンコーダ信号191をコントローラー120に、電圧、抵抗、インピーダンス、電磁気、高周波、電流、インダクタンス、静電容量、赤外線および光学から選択された少なくとも1つの手段によって通信する。コントローラー120は、エンコーダ信号191を圧力応答要素150から受信することと、構成要素動作(例えば、ナイフ164の不規則な位置決め)に対するファスナー114配備および形成不均衡を決定することとを行うような構成および寸法とされていることも予想される。コントローラー120は、また、エラーコードを初期化することか、またはファスナー114配備設定を改変することとを行うような構成および寸法とされている。
【0057】
ここで、図12〜16を参照すると、外科手術デバイスまたはエンドエフェクタが本開示の別の実施形態に従う電力外科手術ステープリング装置として示され、全体が500として指定される。エンドエフェクタ500は、平行分離ジョーシステムを含み、対向するジョーは、互いに対して接近及び分離中に平行なままである。エンドエフェクタ500は、電気機械電源(示されていない)の電力回転駆動シャフトへ接続する能力を有するように構成されている。
【0058】
図12および図13においてみられるように、エンドエフェクタ500は、第一のジョー580および第二のジョー550を含み、第一のジョー580および第二のジョー550は、互いにそれぞれの第一の端部において接触することによって平行な接近および分離を可能にする。
【0059】
図13においてみられるように、第二のジョー550は、アンビル505を含む。アンビル505は、垂直に配置された内側がねじ状の穴5051を上方端部5052において有し、アンビル505の領域5054に沿って平行な列に配列された複数のステープルガイド5053を有する。アンビル505は、第一のジョー580に対向および対応する。
【0060】
引き続き図13を参照すると、第一のジョー580は、ハウジングフレーム506を含む。ハウジングフレーム506は、一対の内側に配置されたガイド5061を規定する。ガイド5061に沿って、第二のジョー550のアンビル505の一対のリブ5055が移動し得、ハウジングフレーム506は、アンビル505の方およびアンビル505から離れて動き得るが、アンビル505と平行なままである。
【0061】
ギアハウジング255は、ハウジングフレーム506の1つの側面5062に搭載される。クイックコネクト連結511は、ギアハウジング255上に搭載される。メモリモジュール501は、ギアハウジング255に配列され、コネクター2554を含む。コネクター2554は、ギアハウジング255の開口部2553を通り延びるか、または開口部2553を通りアクセス可能である。メモリモジュール501は、ギアハウジング255内の位置に機内シム530および機外シム531によって維持される。ギアハウジング255は、第一の駆動ソケット180および第二の駆動ソケット310を含む。この実施形態において、ギアハウジング255の第一の駆動ソケット180は、第一のピニオン508aを含み、ギアハウジング255の第二の駆動ソケット310は、第二のピニオン508bを含む。
【0062】
第一および第二のピニオン508a、508bの各々は、それぞれの第一および第二の平歯車529a、529bを係合する。第一の平歯車529aは、回転せずに第一のウォーム523aを係合する。第二の平歯車529bは、回転せずに第二のウォーム523bを係合する。第一のウォーム523aおよび第二のウォーム523bの各々のねじ状の部分は、フレームハウジング506内に配置される。
【0063】
ギア522もフレームハウジング506内に配置される。ギア522は、ねじ状に第一のウォーム523aのねじ状の部分を係合する。ギア522は、回転せずにスクリュー521を係合する。スクリューは、外側に配置されたスレッド5214を含み、スレッド5214は、アンビル505の内側がねじ状の穴5051を係合する。
【0064】
第一のギア516および第二のギア517は、フレームハウジング506内に配置される。第一のギア516および第二のギア517は、第二のウォーム523bの反対の側面上に位置決めされ、係合される。特に、第一のギア516は、第二のウォーム523bの第一の側面を係合し、第二のギア517は、第二のウォーム523bの第二の側面を係合する。
【0065】
外側がねじ状のスクリュー504は、第一のギア516の内側がねじ状の穴5164を通して配置され、外側がねじ状のスクリュー503は、第二のギア517の内側がねじ状の穴5174を通して配置される。第一および第二のギア516、517は、第二のウォーム523bの反対の側面上に設けられ、係合するので、第一および第二のギア516、517の内側がねじ状の穴5164、5174ならびに外側がねじ状のスクリュー504および503は、互いに対向して、ねじ状にされ得る。スクリュー503と504との両方は、推力プレート502の上部表面5021にしっかり連結される。推力プレート502は、ハウジングフレーム506の反対の側壁の間に位置決めされる。
【0066】
ステープル推進器514は、推力プレート502の底部表面に取り付けられる。ステープル推進器514は、下方に配置された歯5143の平行な列5141および5142を含み、それらの各々は、アンビル505のステープルガイド5053に対応し、一列に並ぶ。カッティングエッジ5191(図13において対面して示される)を有するナイフ519は、ステープル推進器514の下方に配置された歯5143の平行な列の間に配置される。
【0067】
ステープルホルダーまたはカートリッジ513は、ステープル推進器514の下に配置される。ステープルカートリッジ513は、垂直に配列されたスロット5132を規定し、それらの各々は、ステープル推進器514の下方に配置された歯5143およびアンビル505のステープルガイド5053に対応し、一列に並ぶ。ステープル528は、各スロット5132に提供される。ステープルカートリッジ513も長手方向に配置されたスロット5131を含み、スロット5131をナイフ519が通過され得る。
【0068】
ステープル保持器540が提供され、ステープル528をステープルカートリッジ513内に維持し、異物がステープルカートリッジ513のスロット5132にエンドエフェクタ500の積出し中に入ることを妨げるために、ステープルカートリッジ513の底部表面を覆うように構成されている。
【0069】
ハウジング上部510が提供され、ハウジングフレーム506の反対の側面5062と5065との間に配列され、ハウジングフレーム506内の構成要素を保護する。
【0070】
2002年3月8日に出願された、名称が「Surgical Device」の米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)に参照がなされ得、その全内容は、本明細書において参照することによって援用され、エンドエフェクタ500の構成要素、構造および動作のより詳細な議論がなされる。さらに、エンドエフェクタは、細長いシャフトを含み得る電力器具ハンドルに接続可能である。別個の分離可能シャフトも用いられ得る。米国特許出願公開第2003/0130677号において開示されるように、シャフトは、ハウジングから延び、第一の連結を介してハウジングに分離可能に取り付けらる可撓性シャフトであり得る。可撓性シャフトの遠位端部は、上で説明されたエンドエフェクタを可撓性シャフトの遠位端部に分離可能に取り付けるように適合される第二の連結を含み得る。第二の連結も異なるタイプのエンドエフェクタを分離可能に取り付けるように適合され得る。別の例示的実施形態において、可撓性シャフトの遠位端部は、外科手術器具ハンドルに永続的に取り付けられ得るか、または統合され得る。
【0071】
シャフトは、例えば、編成駆動ケーブルまたはらせん状駆動ケーブルのような第一の回転可能駆動シャフトおよび第二の回転可能駆動シャフトを含み得る。駆動シャフトは、低トルクだが高速なトルクを外科手術器具またはアタッチメントにおいて伝達するように構成され得る。高速/低トルクは、低速/高トルクに、例えば、駆動可撓性シャフトの遠位端部および/または近位端部に配置されたギア配列によって変換される。リモート電力コンソールまたは電力器具ハンドルに配置された電気機械ドライバー要素は、回転可能シャフトを動作させるために用いられる。
【0072】
ある好ましい実施形態において、コントローラーがリモート電力コンソールのハウジングまたは電力器具ハンドルに提供され、コントローラーは、可撓性シャフトに取り付けられたエンドエフェクタの機能および動作の一部または全てならびに器具全体を監視および/または制御するように構成されている。メモリユニットが提供され、ROM構成要素、RAM構成要素などのようなメモリデバイスを含み得る。RAMおよびROM構成要素は、コントローラーと適切な配線を介して電気または論理通信している。メモリユニットもコントローラーまたは他の構成要素とワイヤレスで通信し得る。
【0073】
ここで、図13〜16を参照すると、本開示に従うステープルカートリッジ513を含むエンドエフェクタ500のより詳細な議論が提供される。図13〜16においてみられるように、ステープルカートリッジ513は、その軸長さに沿って区分される。特に、ステープルカートリッジ513は、複数の個々の、別個に移動可能な本体部材または区分513aから形成される。本体部材または区分513aは、ステープルカートリッジ513の長さに沿って、軸方向に延びる。各区分513aは、ステープルカートリッジ513の組織接触表面によって規定される面を横切る方向または直交する方向に自由に動く。
【0074】
図14〜16においてみられるように、スロット5132は、ステープル528をその中に保持するために、少なくとも2つの長手方向に延びる平行な列で配列される。平行な列は、ナイフスロット5131の各側面上に配置される。各対の列のスロット5132は、互いに対してオフセットされるか、またはずらされる。1つの列のスロット5132は、隣接する列のスロット5132の間に配置される。
【0075】
ステープルカートリッジ513の各区分513aは、横切る分割ライン513bによって互いから軸方向に分離される。横切る分割ライン513bは、ステープルカートリッジ513にわたり横切って延び、ステープルスロット5132をわたり延びない。換言すると、横切る横断ライン513bは、軸方向に隣接するスロット5132の間に延びる。さらに、各区分513aは、隣接するスロットの列の各々からの単一のスロット5132を含むためのサイズとされている。しかし、各スロットの列からの1つより多くのスロット5132が各区分513a内に配置され得ることが予期される。
【0076】
引き続き図14〜16を参照すると、エンドエフェクタ500は、圧力感知フィルム526をさらに含む。圧力感知フィルム526は、ステープルカートリッジ513とハウジングフレーム506の側面5062、5065との間に置かれる。特に、圧力感知フィルム526は、複数の個々の圧力感知フィルム区分526aを含み、圧力感知フィルム区分526aは、各々、ステープルカートリッジ513のそれぞれの区分513aとハウジングフレーム506の側面5062、5065との間に置かれる。
【0077】
図13においてみられるように、ステープルカートリッジ513の各区分513aは、それぞれの圧力感知フィルム区分526aの上に、圧縮ばねの形態のそれぞれの付勢部材513cを介して浮遊している。特に、付勢部材513cは、ステープルカートリッジ513のそれぞれの区分513aとエンドエフェクタ500の推力プレート502(図13および図16参照)との間に置かれる。このようにして、利用において、ステープルカートリッジ513の組織接触表面からアンビル505の組織接触表面までのギャップまたは距離が第一のジョー580と第二のジョー550との間にクランプされた組織の厚さに応じて調節または変わり得る。
【0078】
本開示に従って、エンドエフェクタ500のステープルカートリッジ513は、インテリジェント外科手術デバイス、上で説明された器具または装置100に連結された場合か、または2002年3月8日に出願された、名称が「Surgical Device」の米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)(この全内容は、本明細書において参照することによって援用される)において示され、説明される電気機械ドライバーシステムに連結された場合、第一のジョー580と第二のジョー550との間にクランプされた組織のセクションに存在する異なる厚さを収容するように調節する能力を有する。
【0079】
各圧力感知フィルム区分526aは、ステープルカートリッジ513の各区分513aに、第一のジョー580および第二のジョー550のクランプまたは接近中および/またはエンドエフェクタ500の発射中に及ぼされた力を感知する能力を有する。ステープルカートリッジ513の各区分513aは、付勢部材513cによって、非装填コンディションまたは非クランプコンディション中に予め設定された高さまで装填されたばねである。
【0080】
各圧力感知フィルム区分526aは、コントローラー120と電気通信し得る(図2参照)。このようにして、圧力感知フィルム区分526aによって感知された信号は、処理および/または分析のためにコントローラー120に送信され得、処理および/分析され得る。
【0081】
動作において、第一のジョー580および第二のジョー550のクランプまたは接近(つまり、クランプし切る)すると、ステープルカートリッジ513の各区分513aは、ステープルカートリッジ513の各セクション513aに及ぼされた力に応じた量だけ組織によって個々に圧縮される(つまり、それぞれの圧力感知フィルム区分526aに対して加圧される)。ステープルカートリッジ513の各区分513aの浮遊性質に起因して、各区分513aは、左右または側方方向および/または長手方向にわずかに動く能力を有する。
【0082】
ある実施形態において、圧力感知フィルム区分は、コントローラーに接続され、データは、メモリユニットに格納されるか、および/または他の構成要素に送信される。コントローラーのメモリユニット(リモートユニットであり得るか、またはシャフトおよびエフェクタに取り付けられた電力器具ハンドルに組み込まれ得る)は、エンドエフェクタおよび器具全体の動作のための所望のパラメータまたは範囲に関するデータを含む。例えば、ステープルカートリッジ513の各区分513aに及ぼされる力は、圧力感知フィルム区分526aによって、上で説明された圧力応答要素150に実質的に類似する態様で決定される。圧力感知フィルム区分526aによって決定、検知または測定された力は、外科手術デバイスなど(示されていない)上に提供されたモニター、ディスプレイ上に表示され得る。モニターは、ステープルカートリッジ513の各個々の区分513aに及ぼされた力およびステープルカートリッジ513の全長さに及ぼされた全体の力を表示することが予期される。
【0083】
圧力感知フィルム区分によって測定された力は、時間にわたり監視され得る。換言すると、ステープルが噴出され、アンビルに対して形成されるにつれ、力がどのように変わるかが監視され得、コントローラーに送信され得、他の構成要素に送信され得、コントローラーのメモリユニットに格納され得、ステープル形成および/または外科医に情報を提供するためか、または器具の動作に影響させるために用いられるステープルに対する所望のプロファイルに関するデータと比較され得る。
【0084】
用いられ得る圧力センサーは、抵抗、コンダクタンス、インピーダンスおよび静電容量のうちの1つ以上の差異を測定または監視する電気回路を含むが、それに限定されない。センサーは、1つ以上のラミネートされた抵抗のある基板または伝導性基板の層を組み込み得る。他のセンサーが予期される。
【0085】
本開示に従って、上で説明されたインテリジェント外科手術デバイス、器具または装置100または米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)において示され、説明される電気機械ドライバーシステムは、力の大きさを解釈する能力を有し、コンディションが第一のジョー580および第二のジョー550をクランプ/接近させ続けるために許容可能か否か、またはコンディションがエンドエフェクタ500の発射のために許容可能か否かを決定する能力を有する。
【0086】
さらに、本開示に従って、上で説明されたインテリジェント外科手術デバイス、器具または装置100または米国特許出願第10/094,051号(米国特許出願公開第2003/0130677号)において示され、説明される電気機械ドライバーシステムは、障害が第一のジョー580と第二のジョー550との間にクランプされた組織に存在するか否か、およびコンディションがエンドエフェクタ500の発射のために、ステープルカートリッジ513に及ぼされた負荷および/または力に基づいて許容可能か否かを決定する能力を有する。
【0087】
そのため、ステープルカートリッジ513およびその区分513aの浮遊またはばね付勢性質を考慮すると、ステープルカートリッジ513の調節または収容は、一貫性のない厚さおよび障害を有する組織においてより寛大であるか、および/またはそれらは減らされる。さらに、ステープルカートリッジ513の力感知能力は、外科医に、第一のジョー580および第二のジョー550のクランプ/接近中か、および/またはエンドエフェクタ500の発射中に、組織の各部分または区分が晒される圧縮力の量の示しを提供し得る。また、ステープルカートリッジ513は区分され、ステープルカートリッジ513の全長さに沿って配置された複数の圧力感知フィルム区分526aがあるので、外科医は、第一のジョー580と第二のジョー550との間にクランプされた組織における障害の存在に関する情報およびステープルカートリッジ513の長さに沿った障害の場所の示しを提供され得る。
【0088】
外科医に、ステープルカートリッジ513の長さに沿った障害の場所の示しを提供することによって、外科医は、ステープリング手続きまたは発射手続き中に障害にぶつかることを避けるために、必要に応じてエンドエフェクタ500を組織の別の場所またはセクションに動かし得る。
【0089】
動作において、ステープルカートリッジ513の特定の区分513aに及ぼされた力が所定の閾値を超えるか、および/またはステープルカートリッジ513に及ぼされた平均力が所定の閾値を超えた場合、コントローラーは、エラーを登録し得、エラーコードを出すことか、警告を出すことか、および/または発射手続きを停止することかを行うように構成され得る。
【0090】
開示の複数の例示的実施形態が図面において示されたが、開示がそれらに限定されることは意図しておらず、開示は、当分野が許容する限り範囲が広くあることが意図され、明細書も同様に読まれることが意図される。そのため、上の説明は、限定的と解釈されるべきでなく、単なる好ましい実施形態の例示として解釈されるべきである。したがって、実施形態の範囲は、付与された例によってよりも、むしろ添付の特許請求の範囲およびそれらの法的均等物によって決定されるべきである。
【符号の説明】
【0091】
100 電力外科手術ステープリング装置
102 ハウジング
104 細長い部材
106 エンドエフェクタ
108、110 ジョー
136 アクチュエータ
200 手動の外科手術ステープリング装置
【特許請求の範囲】
【請求項1】
外科手術ステープリング装置であって、
アクチュエータを有するハウジングと、
該ハウジングから延びる細長い部材と、
該細長い部材の端部上に配置されたエンドエフェクタであって、該エンドエフェクタは、第一のジョーと第二のジョーとを有し、該第一のジョーは、ステープルカートリッジを有し、該第二のジョーは、複数のステープル形成くぼみを有し、該ステープルカートリッジは、少なくとも第一の区分と第二の区分とを有し、該第一の区分および該第二の区分は、各々、組織接触表面およびステープル受容スロットを有し、該ステープル受容スロットは、該組織接触表面において規定され、該第一の区分および該第二の区分は、該第二のジョーの方へ付勢され、かつ、可動である、エンドエフェクタと、
該第一の区分および該第二の区分の各々のための付勢部材と、
該第一の区分および該第二の区分の各々のための圧力センサーと
を含む、外科手術ステープリング装置。
【請求項2】
圧力が閾値を超えている場合を決定する構成要素をさらに含む、請求項1に記載の外科手術ステープリング装置。
【請求項3】
アクチュエータに動作可能に接続されたモーターをさらに含む、請求項1に記載の外科手術ステープリング装置。
【請求項4】
前記モーターは、前記ハウジングにある、請求項3に記載の外科手術ステープリング装置。
【請求項5】
電源を前記ハウジング内にさらに含み、該電源は、前記モーターに動作可能に接続される、請求項3に記載の外科手術ステープリング装置。
【請求項6】
前記構成要素は、前記モーターを停止するようにプログラムされている、請求項3に記載の外科手術ステープリング装置。
【請求項7】
前記ステープル形成くぼみおよび前記ステープル受容スロットは、直線状の列を規定する、請求項1に記載の外科手術ステープリング装置。
【請求項8】
前記直線状の列は、前記細長い部材の長手方向軸に対して横切って延びる、請求項7に記載の外科手術ステープリング装置。
【請求項9】
前記ステープル形成くぼみおよび前記ステープル受容スロットは、前記エンドエフェクタの長手方向軸に対して角度を規定する、請求項1に記載の外科手術ステープリング装置。
【請求項10】
外科手術装置に選択的に接続するエンドエフェクタであって、
該エンドエフェクタは、
第一のジョーと、
該第一のジョー上に支持されるステープルカートリッジであって、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に可動な区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、該複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して並列される、第二のジョーと、
圧力感知要素であって、該圧力感知要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタ。
【請求項11】
付勢部材であって、該付勢部材は、各ステープルカートリッジ区分と前記第一のジョーとの間に置かれる、付勢部材をさらに含み、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置いた距離に維持する、請求項10に記載のエンドエフェクタ。
【請求項12】
前記ステープルカートリッジは、ステープル保持スロットの少なくとも2つの平行な列を規定し、ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分に提供される、請求項11に記載のエンドエフェクタ。
【請求項13】
前記付勢部材は、力が前記ステープルカートリッジ区分のいずれかの前記組織接触表面に及ぼされると、圧縮する、請求項11に記載のエンドエフェクタ。
【請求項14】
電気外科ステープリングシステムであって、
該電気外科ステープリングシステムは、
電力外科手術装置であって、該電力外科手術装置は、
ハンドル部分であって、該ハンドル部分は、解除可能に外科手術ステープリングエンドエフェクタを該ハンドル部分に接続するように構成および適合されており、該ハンドル部分は、アクチュエータ、モーター、電源およびコントローラーを含み、該アクチュエータは、該エンドエフェクタに接続し、該アクチュエータは、該エンドエフェクタを駆動させ、該モーターは、該アクチュエータを駆動させ、該電源は、該モーターに電力供給し、該コントローラーは、該電源および該モーターのうちの少なくとも1つを制御する、ハンドル部分と、
エンドエフェクタであって、該エンドエフェクタは、該電力外科手術装置の該ハンドル部分への選択的接続のために構成されており、該エンドエフェクタは、
第一のジョーと、
ステープルカートリッジであって、該ステープルカートリッジは、該第一のジョー上で支持されており、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に稼動名区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して配列される、第二のジョーと、
圧力感知要素であって、該圧力監視要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分におよぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタと、
を含む、電力外科手術装置を含み、
各圧力感知要素は、該コントローラーと電気通信しており、
該コントローラーは、該第一のジョーおよび該第二のジョーの接近と、該電力外科手術装置の発射とのうちの少なくとも1つを、該ステープルカートリッジ区分のうちの少なくとも1つに及ぼされ、該それぞれの圧力感知要素によって感知された力が所定の閾値力を超えた場合に停止する、電気外科ステープリングシステム。
【請求項15】
前記エンドエフェクタは、付勢部材をさらに含み、該付勢部材は、各ステープリングカートリッジ区分と前記第一のジョーとの間に置かれ、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置かれた距離に維持する、請求項14に記載の電気外科ステープリングシステム。
【請求項1】
外科手術ステープリング装置であって、
アクチュエータを有するハウジングと、
該ハウジングから延びる細長い部材と、
該細長い部材の端部上に配置されたエンドエフェクタであって、該エンドエフェクタは、第一のジョーと第二のジョーとを有し、該第一のジョーは、ステープルカートリッジを有し、該第二のジョーは、複数のステープル形成くぼみを有し、該ステープルカートリッジは、少なくとも第一の区分と第二の区分とを有し、該第一の区分および該第二の区分は、各々、組織接触表面およびステープル受容スロットを有し、該ステープル受容スロットは、該組織接触表面において規定され、該第一の区分および該第二の区分は、該第二のジョーの方へ付勢され、かつ、可動である、エンドエフェクタと、
該第一の区分および該第二の区分の各々のための付勢部材と、
該第一の区分および該第二の区分の各々のための圧力センサーと
を含む、外科手術ステープリング装置。
【請求項2】
圧力が閾値を超えている場合を決定する構成要素をさらに含む、請求項1に記載の外科手術ステープリング装置。
【請求項3】
アクチュエータに動作可能に接続されたモーターをさらに含む、請求項1に記載の外科手術ステープリング装置。
【請求項4】
前記モーターは、前記ハウジングにある、請求項3に記載の外科手術ステープリング装置。
【請求項5】
電源を前記ハウジング内にさらに含み、該電源は、前記モーターに動作可能に接続される、請求項3に記載の外科手術ステープリング装置。
【請求項6】
前記構成要素は、前記モーターを停止するようにプログラムされている、請求項3に記載の外科手術ステープリング装置。
【請求項7】
前記ステープル形成くぼみおよび前記ステープル受容スロットは、直線状の列を規定する、請求項1に記載の外科手術ステープリング装置。
【請求項8】
前記直線状の列は、前記細長い部材の長手方向軸に対して横切って延びる、請求項7に記載の外科手術ステープリング装置。
【請求項9】
前記ステープル形成くぼみおよび前記ステープル受容スロットは、前記エンドエフェクタの長手方向軸に対して角度を規定する、請求項1に記載の外科手術ステープリング装置。
【請求項10】
外科手術装置に選択的に接続するエンドエフェクタであって、
該エンドエフェクタは、
第一のジョーと、
該第一のジョー上に支持されるステープルカートリッジであって、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に可動な区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、該複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して並列される、第二のジョーと、
圧力感知要素であって、該圧力感知要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分に及ぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタ。
【請求項11】
付勢部材であって、該付勢部材は、各ステープルカートリッジ区分と前記第一のジョーとの間に置かれる、付勢部材をさらに含み、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置いた距離に維持する、請求項10に記載のエンドエフェクタ。
【請求項12】
前記ステープルカートリッジは、ステープル保持スロットの少なくとも2つの平行な列を規定し、ステープル保持スロットの各列からの少なくとも1つの実質的に隣接するステープル保持スロットは、各ステープルカートリッジ区分に提供される、請求項11に記載のエンドエフェクタ。
【請求項13】
前記付勢部材は、力が前記ステープルカートリッジ区分のいずれかの前記組織接触表面に及ぼされると、圧縮する、請求項11に記載のエンドエフェクタ。
【請求項14】
電気外科ステープリングシステムであって、
該電気外科ステープリングシステムは、
電力外科手術装置であって、該電力外科手術装置は、
ハンドル部分であって、該ハンドル部分は、解除可能に外科手術ステープリングエンドエフェクタを該ハンドル部分に接続するように構成および適合されており、該ハンドル部分は、アクチュエータ、モーター、電源およびコントローラーを含み、該アクチュエータは、該エンドエフェクタに接続し、該アクチュエータは、該エンドエフェクタを駆動させ、該モーターは、該アクチュエータを駆動させ、該電源は、該モーターに電力供給し、該コントローラーは、該電源および該モーターのうちの少なくとも1つを制御する、ハンドル部分と、
エンドエフェクタであって、該エンドエフェクタは、該電力外科手術装置の該ハンドル部分への選択的接続のために構成されており、該エンドエフェクタは、
第一のジョーと、
ステープルカートリッジであって、該ステープルカートリッジは、該第一のジョー上で支持されており、該ステープルカートリッジは、組織接触表面を規定し、該ステープルカートリッジは、複数の独立した別個に稼動名区分に分割され、少なくとも1つのステープル保持スロットは、各区分において規定される、ステープルカートリッジと、
第二のジョーであって、該第二のジョーは、該第一のジョーに接続され、該第二のジョーは、アンビルを支持し、該アンビルは、複数のステープル形成くぼみを規定し、複数のステープル形成くぼみは、該ステープルカートリッジの該複数のステープル保持スロットに対応して配列される、第二のジョーと、
圧力感知要素であって、該圧力監視要素は、各ステープルカートリッジ区分と該第一のジョーとの間に置かれ、各圧力感知要素は、各それぞれのステープルカートリッジ区分におよぼされた力を感知する、圧力感知要素と
を含む、エンドエフェクタと、
を含む、電力外科手術装置を含み、
各圧力感知要素は、該コントローラーと電気通信しており、
該コントローラーは、該第一のジョーおよび該第二のジョーの接近と、該電力外科手術装置の発射とのうちの少なくとも1つを、該ステープルカートリッジ区分のうちの少なくとも1つに及ぼされ、該それぞれの圧力感知要素によって感知された力が所定の閾値力を超えた場合に停止する、電気外科ステープリングシステム。
【請求項15】
前記エンドエフェクタは、付勢部材をさらに含み、該付勢部材は、各ステープリングカートリッジ区分と前記第一のジョーとの間に置かれ、該付勢部材は、各ステープルカートリッジ区分を該第一のジョーから一定の距離を置かれた距離に維持する、請求項14に記載の電気外科ステープリングシステム。
【図1A】


【図1B】
【図1C】
【図1D】
【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図1B】
【図1C】
【図1D】
【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−166018(P2012−166018A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2012−17921(P2012−17921)
【出願日】平成24年1月31日(2012.1.31)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成24年1月31日(2012.1.31)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]