
外科用の切断およびステープル留めの装置
【課題】外科器具が開口部内に導入されているとき、この外科器具、および患者の開口部または通路、例えば口腔通路の1つまたは両方への損傷の可能性を最小にするデバイスを提供すること。
【解決手段】本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置は、少なくとも2つの駆動体を含むハウジング14を含む。この外科装置はまた、ハウジングに機械的に取り付け可能で、かつ開位置と閉位置との間でハウジングに対して移動可能なアンビルを含む。第1の駆動体は、ハウジングに対してアンビルを開位置と閉位置との間の中間位置へ移動させるよう動作する。第2の駆動体は、アンビルに対して少なくともハウジングの一部分を中間位置と閉位置との間で移動させるよう動作する。
【解決手段】本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置は、少なくとも2つの駆動体を含むハウジング14を含む。この外科装置はまた、ハウジングに機械的に取り付け可能で、かつ開位置と閉位置との間でハウジングに対して移動可能なアンビルを含む。第1の駆動体は、ハウジングに対してアンビルを開位置と閉位置との間の中間位置へ移動させるよう動作する。第2の駆動体は、アンビルに対して少なくともハウジングの一部分を中間位置と閉位置との間で移動させるよう動作する。
【発明の詳細な説明】
【技術分野】
【0001】
(発明の詳細な説明)
(関連出願への相互参照)
本発明は、1999年1月2日に出願した特許文献1、および特許文献2、2000年11月28日に出願した特許文献3、1999年6月2日に出願した特許文献4、および特許文献5、1999年7月12日に出願した特許文献6、および特許文献7、2000年2月22日に出願した特許文献8、および特許文献9、2000年2月22日に出願した特許文献10、2000年2月22日に出願した特許文献11、および特許文献12、2001年4月17日に出願した特許文献13、2001年7月22日に出願した特許文献14に関し、これらのそれぞれの全文が引用により本明細書に明示的に組み込まれている。本発明は、電気機械式外科システムに関し、より具体的には、患者の体内の組織を把持し、切断し、およびステープル留めするための電気機械式外科システムの外科用アタッチメントに関する。
【背景技術】
【0002】
外科器具を身体の開口部に導入することを必要とする外科手技は数多くある。その一例は、患者の口腔を介して円形の把持、切断、およびステープル留めの器具を挿入するような導入によって、癌性または異常な組織を口部の通路から切除することである。
【発明の概要】
【発明が解決しようとする課題】
【0003】
この種の外科手技の間に経験される問題の1つは、開口部内に外科器具が導入されているとき、または導入されたときに身体の開口部が損傷を受ける可能性があるということである。これは、外科装置を導入する開口部が、口腔の組織など、接触すると容易に損傷を受ける脆弱な組織を含む場合には特に問題となる。この種の外科手技の間に経験されるもう1つの問題は、開口部内に外科器具が導入されているとき、または導入されたときにその外科器具が損傷を受ける可能性があるということである。患者は外科装置が不適切に機能した場合に危害を受けることもあるため、外科装置に対する損傷を回避することは特に重要となろう。
【0004】
外科器具の小型化においては著しい発展がなされてきたが、従来の外科器具は一般に、口部の通路など、患者の比較的小さな開口部または通路内では用いることができない。したがって、従来の外科装置および手技では依然として、外科装置と開口部/通路との一方または双方に損傷を与える危険性がある。
【0005】
それゆえに、外科装置が開口部に導入されたときに外科装置と口部の通路など患者の開口部または通路との一方または双方へ損傷を与える可能性を最小限にする装置に対する必要がある。
【課題を解決するための手段】
【0006】
本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置は、少なくとも2つの駆動体を含むハウジングを含む。この外科装置はまた、ハウジングに機械的に取り付け可能で、かつ開位置と閉位置との間でハウジングに対して移動可能なアンビルを含む。第1の駆動体は、ハウジングに対してアンビルを開位置と閉位置との間の中間位置へ移動させるよう動作する。第2の駆動体は、アンビルに対して少なくともハウジングの一部分を中間位置と閉位置との間で移動させるよう動作する。
【0007】
好都合なことに、アンビルおよびハウジングは、第1および第2の把持面をそれぞれ形成する。この外科装置は、アンビルが閉位置にあるとき、アンビルの第1の把持面とハウジングの第2の把持面との間にある組織の区画を把持するよう構成されている。ハウジングは、第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含むことができる。ハウジングはまた、第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成されたステープル留め要素を含むことができる。ステープル留め要素は、第2の駆動体によってハウジング内で収縮位置と伸長位置との間で軸方向に移動するよう構成されたステープルカートリッジと、ステープルカートリッジの各ステープルスロット内に格納されたステープルをステープルスロットからアンビル内のステープルガイド内へ押し込むよう構成されたステープルプッシャとを含む。
【0008】
本発明はまた、その様々な実施形態に従って、組織の区画をステープル留めするための外科装置に関する。この外科装置は、ステープルプッシャとステープルを格納するよう構成されたハウジングとを含む。ハウジングはステープルプッシャに対して選択的に移動可能である。また、この外科装置はステープルプッシャおよびハウジングに対して移動可能なアンビルを含む。アンビルが移動すると、ハウジングはステープルプッシャに対して移動する。アンビルは、アンビルがハウジングの把持面から離隔される第1の位置と、アンビルがハウジングの把持面と接触する第2の位置との間で、ステープルプッシャに対して移動可能とすることができる。さらに、アンビルは、第2の位置と、ハウジングに格納されたステープルがステープルプッシャによってハウジングから押し出されてアンビルに対して閉じられる第3の位置との間で、ステープルプッシャに対して移動可能とすることもできる。一実施形態において、ハウジングは剪断ピンによってステープルプッシャに結合されており、ここでその剪断ピンは、アンビルが第2の位置と第3の位置との間で移動することによって所定量の圧力をハウジングの把持面に作用させたときに、剪断するよう構成されている。
【0009】
また、本発明は、その様々な実施形態に従って、組織の区画を切断するための外科装置に関する。この外科装置は切断要素と把持面を有するハウジングとを含む。ハウジングは切断要素に対して選択的に移動可能である。この外科装置はまた、切断要素およびハウジングに対して移動可能なアンビルを含む。アンビルが移動するとハウジングは切断要素に対して移動する。アンビルは、アンビルがハウジングの把持面から離隔される第1の位置とアンビルがハウジングの把持面と接触する第2の位置との間で、切断要素に対して移動可能とすることもできる。さらに、アンビルは、第2の位置と切断要素がアンビルに接触させられる第3の位置との間で、切断要素に対して移動可能とすることもできる。一実施形態において、ハウジングは剪断ピンによって切断要素に結合され、この剪断ピンは、アンビルが第2の位置と第3の位置との間で移動することによって所定量の圧力をハウジングの把持面に作用させたときに、剪断するよう構成されている。
【0010】
また、本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置は第1の把持面を形成するハウジングを含む。この外科装置はまた、機械的に取り付け可能で、かつ伸長位置と収縮位置との間で軸に沿ってハウジングに対して移動可能なアンビルを含む。アンビルは第2の把持面を形成する。第1および第2の把持面の少なくとも一部分は軸に対して直交しない。この外科装置は、アンビルが閉位置にあるとき、第1および第2の把持面の間の組織の区画を把持するよう構成されることが好ましい。さらに、第1および第2の把持面は互いに平行とすることができる。第1の駆動体を利用して、アンビルをハウジングに対して移動させることができる。また第2の駆動体を利用することもでき、ここでハウジングは第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含む。さらに、ハウジングは、第2の駆動体によって収縮位置と伸長位置との間で駆
動されるよう構成されたステープル留め要素を含むことができる。
【0011】
また、本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置はまた、ステープル留め要素を含むハウジングを含む。ステープル留め要素は、複数のスロットとスロット内に格納されたステープルとを形成するステープルカートリッジを含む。ステープル留め要素はまた、複数のスロットと位置合わせされるステープルプッシャフィンガを有するステープルプッシャを含む。この外科装置はまた、収縮位置と中間位置の間でステープルカートリッジとステープルプッシャとを共に移動させるよう構成された駆動体を含む。中間位置において、駆動体はステープルカートリッジに対してステープルプッシャを伸長位置へ移動させる。この外科装置はまた、駆動体が収縮位置と中間位置との間でステープルカートリッジとステープルプッシャとを共に移動させるときに、ステープルカートリッジとステープルプッシャとの相対的位置を維持するよう構成された干渉要素を含むことができる。中間位置は、ステープルカートリッジが組織の区画を十分に把持する位置、またはステープルカートリッジがハウジングに対して所定位置に軸方向に係止される位置とすることができる。干渉要素は脆性の構成要素であってもよい。代替的に、干渉要素はステープルプッシャに結合することができ、所定の圧力までステープルカートリッジの一部分との接触を維持する、軸方向に延在するリブを含むことができる。また、この外科装置は刃部などの切断要素を含むこともでき、ここで干渉要素の軸方向に延在するリブは、ステープルカートリッジの反対側に配設された軸方向に延在するリブと刃部とに接触する。
【0012】
また、本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置はハウジングを含むことができる。この外科装置はまた、ハウジングの遠位端に配置され、スロット内に格納された複数のスロットおよびステープルを形成するステープルカートリッジを含むこともできる。この外科装置はまた、ステープルカートリッジに対して近位側に配置され、複数のスロットと位置合わせされる複数のステープルプッシャフィンガを有するステープルプッシャを含むこともできる。この外科装置はまた、ステープルプッシャに対して近位側に配置され、ハウジング内で同時に回転させられかつステープルカートリッジに対して遠位側に前進させられるよう構成されたプッシャ要素を含むことができる。プッシャ要素はステープルプッシャに向かって延在するカム要素を有し、その結果、カム要素は複数のステープルプッシャフィンガに対して順次押圧する。プッシャ要素は、スパイダーねじ要素(spiderscrewelement)の首部分など、ステープルカートリッジに向か
って長手方向に延在する回転可能な部材にキー結合することができる。この外科装置はまた、プッシャ要素に対して近位側に配置されたナットを含むことができ、そのナットは雌ねじ孔を有し、そのナットの雌ねじ孔は回転可能な部材と螺合する。
【0013】
また、本発明は、その様々な実施形態に従って、開口部と患者の通路とのいずれかに外科装置を挿入することを容易にするためのスリーブに関し、この外科装置は断面を形成する遠位端を有する。この外科装置は、その外科装置の少なくとも一部分を覆うように構成された第1の部分を含むことができる。また、この外科装置は、閉包要素が外科装置の遠位端の断面よりも小さい断面へ勾配する挿入位置と、外科装置が閉包要素を介して開口部と患者の通路とのいずれかで外科手術を実施するよう構成される収縮位置との間で、選択的に移動可能な少なくとも1つの閉包要素を含むこともできる。
例えば、本願発明は以下を提供する:
1.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
少なくとも2つの駆動体を含むハウジングと、
上記ハウジングに機械的に取り付け可能で、かつ伸長位置と収縮位置との間で上記ハウジングに対して移動可能なアンビルとを備え、
上記駆動体のうちの第1の駆動体は、上記伸長位置と上記収縮位置との間の中間位置へ上記アンビルを上記ハウジングに対して移動させるよう構成され、上記駆動体のうちの第2の駆動体は、上記中間位置と上記収縮位置との間で上記アンビルに対して上記ハウジングの少なくとも一部分を移動させるように構成されている外科装置。
2.上記アンビルおよび上記ハウジングは第1および第2の把持面をそれぞれ形成し、上記外科装置が、上記アンビルが上記収縮位置にあるとき、上記アンビルの上記第1の把持面と上記ハウジングの上記第2の把持面との間で組織の区画を把持するよう構成されていることを特徴とする、1に記載の外科装置。
3.上記ハウジングは、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含むことを特徴とする、1に記載の外科装置。
4.上記ハウジングは、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成されたステープル留め要素を含むことを特徴とする、1に記載の外科装置。
5.上記ステープル留め要素は、上記第2の駆動体によって上記ハウジング内で収縮位置と伸長位置との間で軸方向に移動するよう構成されたステープルカートリッジを含むことを特徴とする、1に記載の外科装置。
6.上記ステープルカートリッジは、上記第2の把持面を含むことを特徴とする4に記載の外科装置。
7.上記ステープル要素は、上記ステープルカートリッジの各ステープルスロット内に格納されたステープルを上記ステープルスロットから押し出し、上記アンビル内へ押し込むよう構成されたステープルプッシャを含むことを特徴とする、6に記載の外科装置。
8.上記アンビルおよび上記ハウジングは、上記アンビルが上記ハウジングに対して上記中間位置で軸方向に係止可能となるよう構成されていることを特徴とする、1に記載の外科装置。
9.上記第1および第2の駆動体は、各回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸が少なくとも1つのモータによって選択的に回転されることを特徴とする、1に記載の外科装置。
10.上記回転可能な駆動軸は、制御装置の制御下で選択的に回転されることを特徴とする、9に記載の外科装置。
11.組織の区画をステープル留めする外科装置であって、
ステープルプッシャと、
ステープルを格納するよう構成されたハウジングであって、上記ステープルプッシャに対して選択的に移動可能なハウジングと、
上記ステープルプッシャおよび上記ハウジングに対して移動可能なアンビルであって、上記アンビルが移動すると上記ハウジングが上記ステープルプッシャに対して移動する、アンビルと、
を含む外科装置。
12.上記アンビルは、上記アンビルが上記ハウジングの把持面から離隔される第1の位置と、上記アンビルが上記ハウジングの上記把持面と接触する第2の位置との間で、上記ステープルプッシャに対して移動可能であることを特徴とする、11に記載の外科装置。13.上記アンビルは、上記第2の位置と、上記ハウジングに格納された上記ステープルが上記ステープルプッシャによって上記ハウジングから押し出されて上記アンビルに対して閉じられる第3の位置との間で、上記ステープルプッシャに対して移動可能であることを特徴とする、12に記載の外科装置。
14.上記アンビルが上記第2の位置と上記第3の位置との間で移動すると、上記ハウジングが上記ステープルプッシャに対して移動することを特徴とする、13に記載の外科装置。
15.上記ハウジングは、剪断ピンによって上記ステープルプッシャに結合されることを特徴とする、14に記載の外科装置。
16.上記剪断ピンは、上記アンビルが上記第2の位置と上記第3の位置との間で移動することによって所定量の圧力を上記ハウジングの上記把持面に作用させたときに剪断する
ように構成されていることを特徴とする、15に記載の外科装置。
17.上記ハウジングは、、上記ステープルプッシャから延在する、対応する複数のプッシャフィンガと位置合わせされた複数のステープルスロットを含むことを特徴とする、16に記載の外科装置。
18.上記アンビルを上記ハウジングおよび上記ステープルプッシャに対して移動させるように構成された第1の駆動体をさらに備えることを特徴とする、17に記載の外科装置。
19.上記ステープルプッシャに装着された切断要素をさらに備えることを特徴とする、18に記載の外科装置。
20.上記切断要素は、上記アンビルが上記第2の位置と上記第3の位置との間で上記ステープルプッシャに対して移動するとき、上記アンビルと上記ハウジングの上記把持面との間に配置された組織を切断するよう動作することを特徴とする、19に記載の外科装置。
21.組織の区画を切断するための外科装置であって、
切断要素と、
把持面を有するハウジングであって、上記切断要素に対して選択的に移動可能なハウジングと、
上記切断要素および上記ハウジングに対して移動可能なアンビルであって、上記アンビルが移動すると上記ハウジングが上記切断要素に対して移動する、アンビルと、
を含む外科装置。
22.上記アンビルは、上記アンビルが上記ハウジングの把持面から離隔される第1の位置と、上記アンビルが上記ハウジングの上記把持面と接触する第2の位置との間で、上記切断要素に対して移動可能であることを特徴とする、21に記載の外科装置。
23.上記アンビルは、上記第2の位置と上記切断要素が上記アンビルに接触させられる第3の位置との間で、上記切断要素に対して移動可能であることを特徴とする、22に記載の外科装置。
24.上記アンビルが上記第2の位置と上記第3の位置との間で移動すると、上記ハウジングが上記切断要素に対して移動することを特徴とする、23に記載の外科装置。
25.上記ハウジングは、剪断ピンによって上記切断要素に結合されることを特徴とする、24に記載の外科装置。
26.上記剪断ピンは、上記アンビルが上記第2の位置と上記第3の位置との間で移動することによって所定量の圧力を上記ハウジングの上記把持面に作用させたときに剪断するよう構成されていることを特徴とする、25に記載の外科装置。
27.上記アンビルを上記ハウジングおよび上記切断要素に対して移動させるよう構成された第1の駆動体をさらに備えていることを特徴とする、26に記載の外科装置。
28.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
第1の把持面を形成するハウジングと、
機械的に取り付け可能で、かつ伸長位置と収縮位置との間で軸に沿って上記ハウジングに対して移動可能なアンビルであって、第2の把持面を形成するアンビルと、
を備え、
上記第1および第2の把持面の少なくとも一部分が上記軸に対して直交しない外科装置。29.上記外科装置は、上記アンビルが上記閉位置にあるとき、上記第1および第2の把持面間の組織の区画を把持するよう構成されていることを特徴とする、28に記載の外科装置。
30.上記第1および第2の把持面は、互いに平行であることを特徴とする、29に記載の外科装置。
31.上記アンビルを上記ハウジングに対して移動させるよう構成された第1の駆動体をさらに備えていることを特徴とする、30に記載の外科装置。
32.第2の駆動体をさらに備え、
上記ハウジングが、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含むことを特徴とする、31に記載の外科装置。
33.第2の駆動体をさらに備え、
上記ハウジングが、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成されたステープル留め要素を含むことを特徴とする、31に記載の外科装置。
34.上記ステープル留め要素は、ステープルカートリッジを含むことを特徴とする、1に記載の外科装置。
35.上記ステープルカートリッジは、上記第2の把持面を形成していることを特徴とする、34に記載の外科装置。
36.上記ステープル要素は、上記ステープルカートリッジの各スロット内に格納されたステープルを上記スロットから押し出し、上記アンビル内へ押し込むよう構成されたステープルプッシャを含むことを特徴とする、35に記載の外科装置。
37.上記ステープルプッシャは、各列が異なる軸方向位置に配置された、ステープルプッシャフィンガの半径方向に離隔された少なくとも2つの列を含むことを特徴とする、36に記載の外科装置。
38.上記ステープルカートリッジの上記スロットは上記第1の把持面内に開口部を形成し、上記開口部は、ステープルプッシャフィンガの半径方向に離隔された少なくとも2つの列と位置合わせされている、半径方向に離隔された少なくとも2つの列に配置され、上記開口部の各列が異なる軸方向位置に配置されていることを特徴とする、37に記載の外科装置。
39.上記第2の把持面は、ステープルを閉じるよう構成されたステープルガイドを形成し、上記ステープルガイドは、ステープルプッシャフィンガの半径方向に離隔した上記少なくとも2つの列と位置合わせされている、半径方向に離隔した少なくとも2つの列に配置され、上記ステープルガイドの各列が異なる軸方向位置に配置されていることを特徴とする、38に記載の外科装置。
40.上記第1および第2の駆動体は、各回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は少なくとも1つのモータによって選択的に回転されることを特徴とする、39に記載の外科装置。
41.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
ステープル留め要素を含むハウジングであって、上記ステープル留め要素が複数のスロットと上記スロット内に格納されたステープルとを画定するステープルカートリッジを含み、ステープルプッシャが上記複数のスロットと位置合わせされるステープルプッシャフィンガを有するハウジングと、
上記ステープルカートリッジおよび上記ステープルプッシャを共に収縮位置と中間位置との間で移動させるよう構成された駆動体であって、上記中間位置で上記ステープルプッシャを伸長位置へ上記ステープルカートリッジに対して移動させる駆動体と、
を備える外科装置。
42.上記駆動体が上記収縮位置と上記中間位置との間で上記ステープルカートリッジと上記ステープルプッシャとを共に移動させるときに、上記ステープルカートリッジと上記ステープルプッシャとの相対的位置を維持するよう構成された干渉要素をさらに含むことを特徴とする、41に記載の外科装置。
43.上記中間位置は、上記ステープルカートリッジが組織の区画を十分に把持する位置と、上記ステープルカートリッジが上記ハウジングに対して所定位置に軸方向に係止される位置とのいずれかであることを特徴とする、41に記載の外科装置。
44.上記中間位置は、上記ステープルカートリッジが十分に組織の区画を把持する位置であることを特徴とする、41に記載の外科装置。
45.上記干渉要素は、脆性の構成要素であることを特徴とする、42に記載の外科装置。
46.上記干渉要素は、上記ステープルプッシャに結合されており、所定の圧力まで上記
ステープルカートリッジの一部分との接触を維持する、軸方向に延在するリブを含むことを特徴とする、42に記載の外科装置。
47.刃部をさらに含み、上記干渉要素の上記軸方向に延在するリブが、上記ステープルカートリッジの反対側に配設された半径方向に延在するリブと上記刃部とに接触することを特徴とする、46に記載の外科装置。
48.上記所定の圧力に達したとき、上記干渉要素の上記半径方向に延在するリブは、上記ステープルカートリッジの上記反対側に配設された半径方向に延在するリブと上記刃部との間を移動し、それによって上記ステープルプッシャを上記ステープルカートリッジに対して移動させることが可能になることを特徴とする、47に記載の外科装置。
49.アンビルをさらに備え、上記アンビルに対して上記ステープルが上記ステープルプッシャによって押圧されることを特徴とする、48に記載の外科装置。
50.上記第1の駆動体は、回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は制御装置の制御下で少なくとも1つのモータによって選択的に回転されることを特徴とする、49に記載の外科装置。
51.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
ハウジングと、
上記ハウジングの遠位端に配置され、上記スロット内に格納された複数のスロットおよびステープルを形成するステープルカートリッジと、
上記ステープルカートリッジに対して近位側に配置され、上記複数のスロットと位置合わせされる複数のステープルプッシャフィンガを有するステープルプッシャと、
上記ステープルプッシャに対して近位側に配置され、上記ハウジング内で回転されると同時に上記ステープルカートリッジに対して遠位側に前進するよう構成されたプッシャ要素であって、上記プッシャ要素は上記ステープルプッシャに向かって延在するカム要素を有し、その結果、上記カム要素が上記複数のステープルプッシャフィンガに対して順次押圧する、プッシャ要素と、
を備える外科装置。
52.上記プッシャ要素は、上記ステープルカートリッジに向かって長手方向に延在する回転可能な部材にキー結合されていることを特徴とする、51に記載の外科装置。
53.上記回転可能な部材は、スパイダーねじ要素の首部であることを特徴とする、52に記載の外科装置。
54.上記プッシャ要素に対して近位側に配置されたナットをさらに含み、上記ナットは雌ねじ孔を有し、上記回転可能な部材が螺刻され、上記ナットの上記雌ねじ孔は上記回転可能な部材と螺合することを特徴とする、53に記載の外科装置。
55.上記ナットは、上記ハウジングにキー結合され、その結果、上記回転可能な部材が回転すると上記ナットが遠位側に前進することを特徴とする、54に記載の外科装置。
56.上記ナットと上記プッシャ要素との間にベアリングをさらに備え、上記ベアリングは、上記ナットと上記プッシャ要素との間に実質的に摩擦のない接触を実現することを特徴とする、55に記載の外科装置。
57.上記ステープルプッシャフィンガが上記ステープルカートリッジの上記スロットから上記ステープルを完全に押し出すために、上記プッシャ要素が一回転を超えて回転するよう構成されていることを特徴とする、56に記載の外科装置。
58.上記プッシャ要素に対して遠位側に配置された切断要素をさらに含むとともに、上記プッシャ要素によって押圧されるよう構成されていることを特徴とする、51に記載の外科装置。
59.上記切断要素が上記ステープルカートリッジの把持面に配置された組織の区画を切断するために、上記プッシャ要素が一回転を超えて回転するように構成されていることを特徴とする、58に記載の外科装置。
60.上記回転式部材は第1の駆動体によって回転されるように構成され、上記第1の駆動体は制御装置の制御下で少なくとも1つのモータによって選択的に回転されることを特
徴とする、52に記載の外科装置。
61.患者の開口部と通路とのいずれかに外科装置を挿入することを容易にするためのスリーブであって、
上記外科装置は、
上記外科装置の少なくとも一部分を被覆するよう構成された第1の部分と
少なくとも1つの閉包要素であって、上記外科装置の上記遠位端の上記断面よりも小さい断面へ先細となる挿入位置と、上記外科装置が上記閉包要素を介して上記患者の上記開口部と上記通路とのいずれかで外科手術を実施するよう構成される収縮位置との間で選択的に移動可能な少なくとも1つの閉包要素と、
を備えるスリーブ。
62.上記少なくとも1つの閉包要素は、対向して配設された一対の閉包要素を含むことを特徴とする、61に記載の外科装置。
63.上記対向して配設された一対の閉包要素は、カモノハシの形状を有することを特徴とする62に記載の外科装置。
64.上記対向して配設された一対の閉包要素は、上記スリーブの上記第1の部分から延在するフラップに取り付けられていることを特徴とする、62に記載の外科装置。
65.上記少なくとも1つの閉包要素はリングを含み、上記挿入位置において、上記リングによって形成される軸が上記外科装置によって形成される長手方向の軸に実質的に直交することを特徴とする、61に記載の外科装置。
66.上記少なくとも1つの閉包要素は、上記スリーブの上記第1の部分が上記外科装置に対して近位側に移動することによって、上記収縮位置に移動可能であることを特徴とする、61に記載の外科装置。
67.上記スリーブは、比較的高度な潤滑性を有する材料から形成されていることを特徴とする、61に記載の外科装置。
68.上記スリーブは、オートクレーブ滅菌可能な材料から形成されていることを特徴とする、61に記載の外科装置。
69.上記スリーブは、上記外科装置の形状に従う外形を有することを特徴とする、61に記載の外科装置。
70.アンビルおよびハウジングを有する外科用アタッチメントを使用して組織の区画の切断とステープル留めのうち少なくとも1つを行う方法であって、
上記アンビルを上記ハウジングに機械的に取り付けるステップと、
第1の駆動体で、上記アンビルを上記ハウジングに対して開位置と閉位置との間の中間位置へ移動させるステップと、
第2の駆動体で、上記ハウジングの少なくとも一部分を上記アンビルに対して上記中間位置と上記閉位置との間で移動させるステップと、
を含む方法。
71.上記ハウジングの上記少なくとも一部分を上記アンビルに対して上記閉位置に移動させるステップが、上記アンビルの第1の把持面と上記ハウジングの第2の把持面との間で組織の区画を把持することを含むことを特徴とする、70に記載の方法。
72.上記第2の駆動体で、収縮位置と伸長位置との間で切断要素を駆動するステップをさらに含む、71に記載の方法。
73.上記第2の駆動体で、収縮位置と伸長位置との間でステープル留め要素を駆動するステップをさらに含むことを特徴とする、71に記載の方法。
74.上記第2の駆動体で、収縮位置と伸長位置との間でステープルカートリッジを上記ハウジング内で軸方向に駆動するステップをさらに含むことを特徴とする、71に記載の方法。
75.上記ステープルカートリッジの各ステープルスロット内にステープルを格納するステップと、
上記第2の駆動体でステープルプッシャを駆動するステップと、
上記ステープルプッシャで上記ステープルを上記アンビル内のステープルガイド内に押し
込むステップと、
をさらに備えることを特徴とする、74に記載の方法。
76.上記アンビルを上記ハウジングに対して上記中間位置で軸方向に係止するステップをさらに備えることを特徴とする、71に記載の方法。
77.上記第1および第2の駆動体をそれぞれの回転可能な駆動軸に取り付けるステップと、上記回転可能な駆動軸を少なくとも1つのモータによって選択的に回転させるステップとをさらに備えることを特徴とする、71に記載の方法。
78.上記選択的に回転させるステップが、上記回転可能な駆動軸を制御装置の制御下で選択的に回転させることを含むことを特徴とする、77に記載の方法。
79.組織の区画をステープル留めする方法であって、
ステープルプッシャに対して選択的に移動可能であるハウジング内にステープルを格納するステップと、
アンビルを上記ステープルプッシャおよび上記ハウジングに対して移動させるステップであって、上記アンビルを移動させると上記ハウジングが上記ステープルプッシャに対して移動するステップと、
を備える方法。
80.上記移動させるステップが、上記アンビルが上記ハウジングの把持面から離隔される第1の位置と、上記アンビルが上記ハウジングの上記把持面と接触する第2の位置との間で、上記アンビルを上記ステープルプッシャに対して移動させることを含むことを特徴とする、79に記載の方法。
81.上記移動させるステップが、上記第2の位置と、上記ハウジングに格納された上記ステープルが上記ステープルプッシャによって上記ハウジングから押し出されて上記アンビルに対して閉じられる第3の位置との間で、上記アンビルを上記ステープルプッシャに対して移動させることを含むことを特徴とする、80に記載の方法。
82.上記第2の位置と上記第3の位置との間で上記アンビルを移動させるステップが、上記ハウジングを上記ステープルプッシャに対して移動することを含むことを特徴とする、81に記載の方法。
83.上記ハウジングを剪断ピンによって上記ステープルプッシャに結合するステップをさらに備えることを特徴とする、82に記載の方法。
84.上記アンビルで、所定量の圧力を上記ハウジングの上記把持面に作用させるステップと、
上記アンビルが上記第2の位置と上記第3の位置との間で移動するよう上記剪断ピンを剪断するステップと、
をさらに備えることを特徴とする、83に記載の方法。
85.上記ハウジングの複数のステープルスロットを、上記ステープルプッシャから延在する、対応する複数のプッシャフィンガと位置合わせするステップをさらに備えることを特徴とする、84に記載の方法。
86.上記アンビルを上記ハウジングおよび上記ステープルプッシャに対して移動させるステップが、上記アンビルを第1の駆動体で移動させることを含むことを特徴とする、85に記載の方法。
87.上記アンビルが上記第2の位置と上記第3の位置との間で上記ステープルプッシャに対して移動されるとき、上記アンビルと上記ハウジングの上記把持面との間に配置された組織を切断要素で切断するステップをさらに含むことを特徴とする、86に記載の方法。
88.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
孔部を形成するハウジングと、
上記ハウジングに対して移動可能となるよう上記ハウジングの上記孔部を介して配設されたトロカール軸と、
上記トロカール軸に取り付け可能であり、少なくとも一部分が可撓性を有するアンビル軸
を有するアンビルとを備え、
上記トロカール軸と上記アンビル軸のうちの第1の軸がトロカール受容スロットを形成し、上記トロカール軸と上記アンビル軸のうちの第2の軸が、上記トロカール受容スロット内に挿入可能となるよう構成されたトロカールを含む外科装置。
89.上記トロカール軸の少なくとも一部分は、可撓性を有していることを特徴とする、88に記載の外科装置。
90.上記トロカール受容スロットは、上記トロカール受容スロットと連通する軸方向に延在する孔部を有するケーブル伸長要素内に形成されることを特徴とする、88に記載の外科装置。
91.上記軸方向に延在する孔部が、上記トロカールをその中に挿入可能である広い部分と、上記トロカールを上記軸方向に延在する孔内に保持する狭い部分とを有することを特徴とする、90に記載の外科装置。
92.上記トロカール軸と上記アンビル軸のうちの第1の軸が付勢要素を含み、上記付勢要素は、上記トロカールを上記トロカール受容スロットに挿入することを可能にするよう移動可能であり、上記付勢要素は、上記トロカールを上記軸方向に延在する孔部の上記狭い部分内に保持するために上記トロカールを上記軸方向に延在する孔部の上記狭い部分に向かって付勢するよう構成されていることを特徴とする、91に記載の外科装置。
93.上記付勢要素は、ばねに結合されたプランジャを含むことを特徴とする、92に記載の外科装置。
94.上記トロカール軸と上記アンビル軸のうちの第2の軸は、上記ケーブル伸長要素の上記軸方向に延在する孔部の上記狭い部分に対して着座するよう構成された第1の部分を含むことを特徴とする、93に記載の外科装置。
95.上記第1の部分は形状において球状であることを特徴とする、94に記載の外科装置。
96.上記トロカール軸は、上記ハウジング内の少なくとも1つの駆動体の動作によって、伸長位置と収縮位置との間で上記ハウジングに対して移動可能であることを特徴とする、95に記載の外科装置。
97.上記駆動体は、回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は少なくとも1つのモータによって選択的に回転可能であることを特徴とする、96に記載の外科装置。
98.上記回転可能な駆動軸が制御装置の制御下で選択的に回転されることを特徴とする、97に記載の外科装置。
99.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
孔部を形成するハウジングと、
上記ハウジングに対して移動可能となるように上記ハウジングの上記孔部を通じて配設された、少なくとも一部分が可撓性を有するトロカール軸と、
上記トロカール軸に取り付け可能であり、上記トロカール軸の移動によって上記ハウジングに対して移動可能となるよう構成されたアンビルと、
を備える外科装置。
100.上記アンビルはアンビル軸を含み、上記アンビル軸はトロカール受容スロットを形成し、上記トロカール軸は、上記トロカール受容スロット内に挿入可能となるよう構成されたトロカールを含むことを特徴とする、99に記載の外科装置。
101.上記トロカール受容スロットは、上記トロカール受容スロットと連通する軸方向に延在する孔部を有するアンビルスリーブ内に形成されることを特徴とする、100に記載の外科装置。
102.上記軸方向に延在する孔部は、上記トロカールをその中に挿入可能である広い部分と、上記トロカールを上記軸方向に延在する孔部内に保持する狭い部分とを有することを特徴とする、101に記載の外科装置。
103.上記トロカール軸は、上記ハウジング内の少なくとも1つの駆動体の動作によっ
て、伸長位置と収縮位置との間で上記ハウジングに対して移動可能であることを特徴とする、102に記載の外科装置。
104.上記駆動体は回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は少なくとも1つのモータによって選択的に回転されることを特徴とする、103に記載の外科装置。
105.上記回転可能な駆動軸は制御装置の制御下で選択的に回転されることを特徴とする、104に記載の外科装置。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態による電気機械式外科システムの斜視図である。
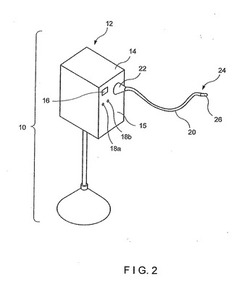
【図2】本発明の一実施形態による遠隔式パワーコンソールの斜視図である。
【図3】図1に示す電気機械式外科システムの可撓性軸の、一部を断面で示した側面図である。
【図4】図3の配線4−4に沿う可撓性軸の断面図である。
【図5(a)】図3に示す可撓性軸の第1継手の背面図である。
【図5(b)】図3に示す可撓性軸の第2継手の正面図である。
【図6(a)】図1に示す電気機械式外科システムのモータ配置を示す概略図である。
【図6(b)】図1に示す電気機械式外科システムの概略図である。
【図6(c)】図3および4に示す可撓性軸のエンコーダの概略図である。
【図6(d)】本発明の一実施形態によるメモリ素子の概略図である。
【図6(e)】本発明の一実施形態による無線RCUの概略図である。
【図6(f)】本発明の一実施形態による配線式RCUの概略図である。
【図7(a)】本発明の一実施形態による取手部の正面斜視図である。
【図7(b)】図7(a)に示す取手部の背面斜視図である。
【図7(c)】図7(a)に示す取手部の分解正面斜視図である。
【図7(d)】図7(a)に示す取手部の頂面図である。
【図7(e)】配線A−Aに沿う図7(d)に示す取手部の側断面図である。
【図7(f)】配線B−Bに沿う図7(d)に示す取手部の側断面図である。
【図8】本発明の一実施形態による、伸長位置にある切断およびステープリング要素の斜視図である。
【図9】本発明の一実施形態による、ある程度閉じた切断およびステープリング要素を示す斜視図である。
【図10(a)】本発明の一実施形態によるアンビルアセンブリの構成要素を示す斜視図である。
【図10(b)】本発明の一実施形態による、分解した状態のステープルおよび刃の部分の構成要素の一部を示す斜視図である。
【図10(c)】本発明の一実施形態による、分解した状態のステープルおよび刃の部分の残りの構成要素を示す斜視図である。
【図11(a)】本発明の一実施形態による切断およびステープリング要素を示す上断面図である。
【図11(b)】本発明の一実施形態による切断およびステープリング要素を示す側断面図である。
【図12】図12(a)は、本発明の一実施形態による切断およびステープリング要素の斜視図である。図12(b)は、本発明の一実施形態によるケーブル伸長要素の付加的機能を示す側断面図である。図12(c)は、本発明の一実施形態によるケーブル伸長要素の付加的機能を示す側断面図である。
【図13−1】図13(a)は、本発明の他の実施形態による取手部を示す図である。図13(b)は、本発明の他の実施形態による取手部を示す図である。
【図13−2】図13(c)は、本発明の他の実施形態による取手部を示す図である。
【図14−1】図14(a)は、本発明の他の実施形態による、組み立てられかつある程度閉じた位置にある切断およびステープリング要素を示す正面斜視図である。図14(b)は、組み立てられかつ部分的に閉じられた配置にある、図14(a)に示す切断およびステープリング要素を示す背面斜視図である。
【図14−2】図14(c)は、組み立てられかつ部分的に閉じられた配置にある、図14(a)に示す切断およびステープリング要素を示す側面図である。図14(d)は、組み立てられかつ部分的に閉じられた配置にある、図14(a)に示す切断およびステープリング要素を示す背面図である。
【図15−1】図15(a)は、本発明の他の実施形態によるアンビルアセンブリの構成要素を示す分解正面図である。図15(b)は、図15(a)に示すステープルおよび刃の部分の構成要素の一部を示す分解斜視図である。
【図15−2】図15(c)は、図15(a)に示すステープルおよび刃の部分の構成要素の残りを示す分解斜視図である。
【図15−3】図15(d)は、図15(a)に示すステープルおよび刃の部分の構成要素の一部を示す組立側断面図である。
【図16】本発明の他の実施形態による外科用アタッチメントのある構成要素を概略的に示す側断面図である。
【図17】本発明の他の実施形態による外科用アタッチメントのある構成要素を概略的に示す側断面図である。
【図18−1】図18(a)は、本発明の他の実施形態によるステープルおよび刃の部分の構成要素の一部を示す分解斜視図である。
【図18−2】図18(b)は、図18(a)に示すステープルおよび刃の部分の構成要素を示す組立側断面図である。
【図19−1】図19(a)は、本発明の一実施形態による、外科装置を被覆するよう構成されたスリーブの分解斜視図である。
【図19−2】図19(b)は、閉位置にある図19(a)に示すスリーブの一部の側断面図である。図19(c)は、開位置にある図19(a)に示すスリーブの閉被要素を示す図である。
【図19−3】図19(d)は、本発明の他の実施形態による、挿入位置にある外科装置を被覆するよう構成されたスリーブの斜視図である。図19(e)は、収縮位置にある図19(d)に示すスリーブの斜視図である。
【発明を実施するための形態】
【0015】
(詳細な説明)
本発明は、電気機械式外科システムに関する。図1は、本発明の一実施形態による電気機械式外科システム10の斜視図である。
【0016】
図1に示すように、電気機械式外科システム10は遠隔式パワーコンソール12を備え、この遠隔式パワーコンソール12は、遠隔式パワーコンソール12から延在延在する可撓性軸20を有する遠隔式パワーコンソール。可撓性軸20は、少なくとも第1の回転可能な駆動軸30および第2の回転可能な駆動軸32を含む。遠隔式パワーコンソール12のさらなる詳細については、たとえば図2と関連させて説明し図示する。可撓性軸20のさらなる詳細については、たとえば図3から図6と関連させて説明し図示する。
【0017】
可撓性ケーブル20の遠位端24にある継手26には、外科用アタッチメント100が取り付けられているか、または取り付け可能である。外科用アタッチメント100は外科手術を実施するために構成されている。例示のみを目的として、外科用アタッチメントを、吻合手技などを実施するために構成された、円形の把持、切断、およびステープル留めの装置であるものとして後述に説明する。ただし、外科用アタッチメントは任意の適切な
種類の外科装置とすることができることは理解されるべきである。さらに、例示のみを目的として、後述する外科用アタッチメントを、患者の口部通路(oralpassage)内で用いられるものとして説明する。ただし、外科用アタッチメントは患者の任意の種類の開口部または通路内で利用することができることは理解されるべきである。好都合なことに、後述の外科用アタッチメントは、比較的小さな断面積を有し、よって患者の口部通路などへの挿入が容易である。
【0018】
外科用アタッチメント100は取手部102を含むことができる。取手部102の近位端102aは、可撓性ケーブル20の遠位端24で継手26に取付け可能である。外科用アタッチメント100はまた可撓性軸104を含むことができ、少なくとも第1の駆動軸104aおよび第2の駆動軸104bがこの可撓性軸104を通って延在している延在取手部102の遠位端102bは可撓性軸104の近位端104aに取付け可能である。可撓性軸104は、組織適合可能で、滅菌可能なエラストマー材料で形成することができる。好ましくは、可撓性軸104はオートクレーブ滅菌可能な材料で形成することができる。さらに、可撓性軸104は、高度な、または比較的高度な潤滑性を有する材料で形成することができる。たとえば、可撓性軸104は、テフロン(登録商標)(すなわち、ポリテトラフルオロエチレン(PTFE)などのフルオロポリマー)、シリコーン樹脂、たとえばSIL−KORE(登録商標)(W.L.Gore&Associates社製)
などのテフロン(登録商標)/シリコーンの組合せ、伸展テフロン(登録商標)等の「EPTFE」などの材料で形成することができる。利用することができるその他の好適な材料およびシール処理については、本出願人による同時係属中の、2002年3月15日に出願された特許文献15にさらに詳細に記載されており、この特許文献15はその全体が参照により本明細書に明らかに組み込まれている。
【0019】
外科用アタッチメント100はまた、切断およびステープル留め用部品103を含むことができる。可撓性軸104の遠位端104bは、切断およびステープル留め用部品103の近位端103aに取り付けられているか、または取付け可能である。切断およびステープル留め用部品103の例示的実施形態の1つを図8から図12(c)に示す。図8に示すように、切断およびステープル留め用部品103はステープルおよび刃の部分106を含む。ステープルおよび刃の部分106の中心に配設された開口部を通って、柔軟とすることが可能なケーブルなどのトロカール軸(trocalshaft)108が軸方向に延在延在している。トロカール軸108の遠位端108aには、トロカール(trocal)110が配設されている。トロカール110はアンビルアセンブリ(anvilassembly)112と係合するように構成されている。外科用アタッチメント100は、以下でより詳細に述べるように、アンビルアセンブリ112をステープルおよび刃の部分106に対して伸長および収縮させるなど選択的に動かすことができるように構成されている。
【0020】
図2を参照すると、本発明の例示的実施形態による遠隔式パワーコンソール12および電気機械式外科システム10の可撓性軸20の斜視図が示されている。遠隔式パワーコンソール12は、フロントパネル15を有するハウジング14を含むことができる。フロントパネル15には、表示装置16および表示器18a、18bが装着されており、これらについては以下でより詳細に説明する。可撓性軸20はハウジング14から延在することができ、第1継手22を介してハウジング14に着脱可能に固定することができる。可撓性軸20の遠位端24は継手26などの第2継手を含むことができ、この第2継手は、外科用アタッチメント100を可撓性軸20の遠位端24に着脱可能に固定する。
【0021】
図3を参照すると、一部を切り欠いた、可撓性軸20の側面図が示されている。一実施形態によれば、可撓性軸20はチューブ状の被覆部28を含み、この被覆部28は、その内側流路40と環境との間を液密にシールするための、コーティングまたはその他のシー
ル処理を含むことができる。被覆部28は、可撓性軸104に関連して先に列挙した材料など、組織適合可能で滅菌可能なエラストマー材料で構成することができる。さらに、被覆部28はまた、オートクレーブ滅菌可能な材料で形成することもできる。第1の回転可能な駆動軸30および第2の回転可能な駆動軸32、ならびに第1のステアリングケーブル34、第2のステアリングケーブル35、第3のステアリングケーブル36、第4のステアリングケーブル37およびデータ伝送ケーブル38が、可撓性軸20の内側流路40内に配設され、可撓性軸20の全長にわたって延在している。図4は、図3の配線4−4に沿った可撓性軸20の断面図であり、複数のケーブル30、32、34、35、36、37、38をさらに示している。ステアリングケーブル34、35、36、37の各遠位端は、可撓性軸20の遠位端24に固定される。複数のケーブル30、32、34、35、36、37、38のそれぞれが、被覆材を有することができる。
【0022】
第1の回転可能な駆動軸30および第2の回転可能な駆動軸32は、例えば編組の、またはつる巻きの駆動ケーブルのような、高度な柔軟性を有する駆動軸として構成することができる。そのような高度な柔軟性を有する駆動ケーブルは、制限されたトルク伝達特性および機能を有することは理解されるべきである。また、図1に示しつつ以下で説明する外科用アタッチメント100は、第1および第2の回転可能な駆動軸30、32によって伝達可能なトルクよりも高いトルク入力を必要とする場合があることも理解されるべきである。したがって、第1および第2の回転可能な駆動軸30、32は、低トルクを高速で伝達するよう構成しても良く、その高速/低トルクは、たとえば、外科用アタッチメント100及び/又は遠隔式パワーコンソール12において可撓性駆動軸20の遠位端24及び/又は近位端20aに配設されたギヤ装置によって、低速/高トルクに変換される。このようなギヤ装置は、ハウジング14内に配設されたモータと可撓性軸20に着脱可能に取付け可能な外科用アタッチメント100との間のパワートレインに沿った任意の適切な場所に設けることができることは理解されるべきである。そのようなギヤ装置は、たとえばスパーギヤ装置、プラネタリギヤ装置、ハーモニックギヤ装置、サイクロイド駆動装置、エピサイクリックギヤなどを包含してよい。
【0023】
図5(a)を参照すると、第1の継手22の背面図が示されている。第1の継手22は、第1のコネクタ44、第2のコネクタ48、第3のコネクタ52および第4のコネクタ56を含み、これらのそれぞれが第1の継手22に回転可能に固定されている。コネクタ44、48、52、56のそれぞれは、穴部46、50、54、58をそれぞれ含む。図5(a)に示すように、穴部46、50、54、58それぞれは六角形状とすることができる。ただし、以下でさらに詳細に説明するように、穴部46、50、54、58は、コネクタ44、48、52、56をハウジング12内に収容されたモータ装置の各駆動軸に回転できないように連結しかつ強固に取り付けるための任意の形状および構成を有することができることは理解されるべきである。以下に説明するように、モータ装置の各駆動軸上に補足的な突起を設けて、それによって可撓性軸20の駆動要素を駆動することができることは理解されるべきである。また、駆動軸上に穴部を設けることができ、かつコネクタ44、48、52、56上に補足的な突起を設けることができることも理解されるべきである。回転しないように、かつ緩めることができるようにコネクタ44、48、52、56とモータ装置の駆動軸とを連結するよう構成されたその他の継手装置を設けても良い。
【0024】
コネクタ44、48、52、56のうちの1つは第1の回転可能な駆動軸30に回転しないように固定され、コネクタ44、48、52、56のうちの別の1つは第2の回転可能な駆動軸32に回転しないように固定される。コネクタ44、48、52、56のうちの残りの2つは、ステアリングケーブル34、35、36、37に対して張力を作用させるよう構成された伝達要素と係合して、それによって可撓性軸20の遠位端20bを操作する。データ伝送ケーブル38はデータコネクタ60と電気的かつデータ転送が可能なよ
うに接続される。データコネクタ60は、たとえば、データケーブル38に収容された個々の電線に対応するとともに、その電線の数に等しい数の電気接点62を含む。第1の継手22は、遠隔式パワーコンソール12に配設された嵌合式でかつ補足的な継手装置に第1の継手22を適切に方向付けるキー構造42を含む。そのようなキー構造42は、第1の継手22と、遠隔式パワーコンソール12に配設された嵌合式でかつ補足的な継手装置との一方または両方に設けることができる。第1の継手22は、たとえば簡潔な押圧動作を使用して第1の継手22をハウジング12に係合させることができるクイックコネクト(quickconnct)形式のコネクタを含むことができる。シール部材は、、第1の継手22の内側と環境との間を液密にシールするために、複数のコネクタ44、48、52、56、60のいずれにも付加して設けることができる。
【0025】
図5(b)を参照すると、可撓性軸20の第2の継手26の正面図が示されている。第2の継手26は第1のコネクタ66および第2のコネクタ68を含み、これらのコネクタはそれぞれ、第2の継手26に回転可能に固定され、第1および第2の回転可能な駆動軸30、32のそれぞれの遠位端に回転しないように固定されている。クイックコネクト形式の管継手64は第2の継手26に設けられ、外科用アタッチメント100を第2の継手に着脱可能に固定している。クイックコネクト形式の管継手64は、たとえば回転式クイックコネクト形式の管継手、差込み形式の管継手などとすることができる。第2の継手26には、外科用器具またはアタッチメントを第2の継手26に適切に位置合わせするためのキー構造74が設けられている。キー構造74または外科用アタッチメント100を可撓性軸20に適切に位置合わせするためのその他の装置は、第2の継手26と外科用アタッチメント100とのいずれか一方または両方に設けることができる。さらに、クイックコネクト形式の管継手を外科用アタッチメント100に設けることもできる。また電気接点72を有するデータコネクタ70が第2の継手26に設けられる。第1の継手22のデータコネクタ60と同様に、第2継手26のデータコネクタ70は、データ伝送ケーブル38の各電線およびデータコネクタ60の接点62に電気的かつデータ転送が可能なように接続された接点72を含む。シール部材は、コネクタ66、68、70に付加して設けられて良く、第2の継手26の内側と環境との間を液密にシールしている。
【0026】
遠隔式パワーコンソール12のハウジング14内には、駆動軸30、32およびステアリングケーブル34、35、36、37を駆動して、それによって電気機械式外科用システム10と第2の継手26に取り付けられた外科用アタッチメント100とを操作するよう構成された電気機械式駆動要素が配設されている。図6(a)に概略的に示した例示的実施形態においては、それぞれが電源を介して動作する5つの電気モータ76、80、84、90、96を遠隔式パワーコンソール12内に配設することができる。ただし、適切な任意の個数のモータを設けることができ、これらのモータは電池の電力、線電流、DC電源、電気的に制御されたDC電源などを介して動作することができることは理解されるべきである。また、モータはDC電源に接続することができ、そのDC電源が線電流に接続され、動作電流をモータに供給することもできることは理解されるべきである。
【0027】
図6(a)はモータの1つの可能な配置を概略的に示している。、第1の継手22およびそれに伴って可撓性軸20がハウジング14に係合するとき、第1のモータ76の出力軸78は第1の継手22の第1のコネクタ44と係合し、それによって第1の駆動軸30と、第2の継手26の第1のコネクタ66とを駆動する。同様に、第1の継手22およびそれに伴って可撓性軸20がハウジング14と係合されるとき、第2のモータ80の出力軸82は、第1の継手22の第2のコネクタ48と係合し、それによって第2の駆動軸32と、第2の継手26の第2のコネクタ68とを駆動する。第1の継手22およびそれに伴って可撓性軸20がハウジング14と係合されるとき、第3のモータ84の出力軸86は、第1の継手22の第3のコネクタ52と係合し、それによって第1の滑車装置88を介して第1および第2のステアリングケーブル34、35を駆動する。第1の継手22お
よびそれに伴って可撓性軸20がハウジング14と係合されるとき、第4のモータ90の出力軸92は、第1の継手22の第4のコネクタ56と係合し、それによって第2の滑車装置94を介して第3および第4のステアリングケーブル36、37を駆動する。第3および第4のモータ84、90はキャリッジ(carriage)100上に固定することができ、このキャリッジ100は、第5のモータ96の出力軸98を介して第1の位置と第2の位置との間で選択的に移動可能であり、第3および第4のモータ84、90を各プーリー装置88、94に選択的に係合および分離させ、それによって可撓性軸20を必要に応じて緊張させて操作可能にし、または弛緩させる。その他の機械的、電気的または電気機械的な機構を使用して、ステアリング機構を選択的に係合および分離することができることは理解されるべきである。モータは、たとえば、参照によりその全文が本明細書に明確に組み込まれる、発明の名称が「ACarriageAssembly for C
ontrolling a Steering Wire Mechanism Withi
n a Flexible Shaft」である特許文献8に記載されているように配置お
よび構成することができる。
【0028】
モータ76、80、84、90、96のうちのずれか1つまたは複数を高速/低トルクモータまたは低速/高トルクモータとすることができることは理解されるべきである。上記のように、第1の回転可能な駆動軸30および第2の回転可能な駆動軸32は、高速かつ低トルクを伝達するよう構成することができる。したがって、第1のモータ76および第2のモータ80は高速/低トルクモータとして構成することができる。代替的に、第1のモータ76および第2のモータ80は、第1のモータ76および第2のモータ80と、第1の回転可能な駆動軸30および第2の回転可能な駆動軸32のそれぞれとの間にトルク低減/速度増幅ギヤ装置を配設して、低速/高トルクモータとして構成することもできる。そのようなトルク低減/速度増幅ギヤ装置は、たとえばスパーギヤ装置、プラネタリギヤ装置、ハーモニックギヤ装置、サイクロイド駆動装置、エピサイクリックギヤなどを包含してよい。そのようなギヤ装置は、遠隔式パワーコンソール12の内部、または、例えば第1の継手22内など、可撓性軸20の近位端内に配設することができることは理解されるべきである。ギヤ装置は、第1の回転可能な駆動軸30及び/又は第2の回転可能な駆動軸32の遠位端及び/又は近位端に設けられ、それらの巻上げ(windup)および破損を防止することは理解されるべきである。
【0029】
図6(b)を参照すると、電気機械式外科システム10の概略図が示されている。制御装置装置1122は遠隔式パワーコンソール12のハウジング14内に設けられており、電気機械式外科システム10と、可撓性軸20に取り付けられた外科用アタッチメント100とのすべての機能および動作を制御するように構成されている。記憶装置1130が設けられており、この記憶装置はROMコンポーネント1132及び/又はRAMコンポーネント1134などの記憶素子を包含してよい。ROMコンポーネント1132は配線1136を介して制御装置1122と電気的かつデータ転送が可能なように通じており、RAMコンポーネント1134は配線1138を介して制御装置1122と電気的かつデータ転送が可能なように通じている。RAMコンポーネント1134は、たとえば磁気記憶装置、光学記憶装置、磁気光学記憶装置、電気的記憶装置など、任意の種類のランダムアクセス記憶装置を包含してよい。同様に、ROMコンポーネント1132は、たとえば、PCカードやPCMCIAタイプの装置等の取外し可能な記憶装置など、任意の種類の読出し専用記憶装置を包含してよい。ROMコンポーネント1132およびRAMコンポーネント1134は単一のユニットとして統合しても、または個別のユニットとしても良く、ROMコンポーネント1132及び/又はRAMコンポーネント1134はPCカードまたはPCMCIAタイプの装置の形式で設けられても良いことは理解されるべきである。制御装置1122はさらに、ハウジング14のフロントパネル15に、より具体的には配線1154を介して表示装置16に、また、各配線1156、1158を介して表示器18a、18bに接続される。配線1116、1118、1124、1126、112
8は、それぞれ第1、第2、第3、第4および第5のモータ76、80、84、90、96に制御装置1122を電気的かつデータ転送が可能なように接続する。配線式遠隔制御ユニット(「RCU」)1150は、配線1152を介して制御装置1122に電気的かつデータ転送が可能なように接続される。また無配線RCU1148が設けられ、この無配線RCU1148は、配線1144を介してトランシーバ1140に接続された送信/受信ユニット1146と、無線リンク1160を介して通信する。トランシーバ1140は、配線1142を介して制御装置1122に電気的かつデータ転送が可能なように接続される。無線リンク1160は、たとえば、赤外線リンクなどの光リンク、無線リンク(radiolink)またはその他の任意の形式の無線通信リンクとすることができる。
【0030】
スイッチ装置1186は、たとえばDIPスイッチの配列とすることができ、配線1188を介して制御装置1122に接続することができる。スイッチ装置1186は、たとえば、表示装置16上でのメッセージおよび指示の表示に使用される複数の言語のうちの1つを選択するために使用することができる。メッセージおよび指示は、たとえば電気機械式外科システム10の操作及び/又は状態、並びに/或いは電気機械式外科システム10に取り付けられた外科アタッチメントに関するものとすることができる。
【0031】
本発明の例示的実施形態によれば、第1のエンコーダ1106が第2の継手26の内部に設けられ、第1の駆動軸30の回転に応答し、かつそれに従って信号を出力するよう構成される。また、第2のエンコーダ1108が第2の継手26の内部に設けられ、第2の駆動軸32の回転に応答し、かつそれに従って信号を出力するよう構成される。エンコーダ1106、1108のそれぞれから出力される信号は、駆動軸30、32のそれぞれの回転位置、ならびにそれらの回転方向を表すことができる。そのようなエンコーダ1106、1108は、たとえばホール効果装置、光学装置などとすることができる。エンコーダ1106、1108は第2の継手26の内部に配設されているものとして説明しているが、エンコーダ1106、1108は、モータシステムと外科器具またはアタッチメントとの間の任意の場所に設けることができることは理解されるべきである。エンコーダ1106、1108を第2の継手26の内部、または可撓性軸20の遠位端に設けると、駆動軸の回転の正確な測定が可能となることは理解されるべきである。エンコーダ1106、1108が可撓性軸20の近位端に配設された場合、第1および第2の回転可能な駆動軸30、32の巻上げによって、測定誤差が生じる可能性がある。
【0032】
図6(c)はホール効果装置を含むエンコーダ1106、1108の概略図である。駆動軸30、32上には、N極1242およびS極1244を有する磁石1240が回転しないように装着されている。エンコーダ1106、1108はさらに第1のセンサー1246および第2のセンサー1248を含み、これらのセンサーは、駆動軸30、32の長軸または回転軸を中心として約90度離隔して配設される。センサー1246、1248の出力は継続的なものであり、その状態は、センサーの検出範囲内における磁場の極性変化の関数として変化する。したがって、エンコーダ1106、1108からの出力信号に基づいて、駆動軸30、32の角度位置は4分の1回転以内に特定することができ、駆動軸30、32の回転方向を特定することができる。各エンコーダ1106、1108の出力は、データ伝送ケーブル38の配線1110、1112それぞれを介して、制御装置1122へ伝送される。エンコーダ1106、1108からの出力信号に基づいて駆動軸30、32の角度位置および回転方向を追跡することによって、制御装置装置1122は、電気機械式外科システム10に結合された外科用アタッチメント100の構成要素の位置及び/又は状態を特定することができる。すなわち、駆動軸30、32の回転数を数えることによって、制御装置装置1122は、電気機械式外科システム10に結合された外科用アタッチメント100の構成要素の位置および/または状態を特定することができる。
【0033】
外科用アタッチメント100は、一実施形態によれば、図6(d)に示すように、第2
継手26のコネクタ70に電気的かつデータ転送が可能なように接続するような寸法および構成で設けられたデータコネクタ1272をさらに含むことができる。この例示的実施形態において、データコネクタ1272は、コネクタ70のリード72の数に等しい数の接点(図示せず)を含む。外科用アタッチメント100の内部には、データコネクタ1272に電気的かつデータ転送が可能なように接続された記憶装置1174が収容されている。記憶装置1174は、たとえばEEPROM、EPROMなどの形式とすることができ、たとえば外科用アタッチメント100のステープル及び刃の部分106の内部に収容することができる。
【0034】
図6(d)は記憶装置1174を図示している。図6(d)に示すように、データコネクタ1272は接点1276を含み、この接点1276のそれぞれは各配線1278を介して記憶装置1174に電気的かつデータ転送が可能なように接続される。記憶装置1174は、たとえばシリアル番号データ1180、アタッチメントタイプ識別子(ID)データ1182および使用データ(usagedata)1184を格納するよう構成されている。記憶装置1174はその他のデータを付加的に格納することができる。シリアル番号データ1180およびIDデータ1182の双方は、読取り専用データとして構成することができる。この例示的実施形態において、シリアル番号データ1180は特定の外科用アタッチメントを一意的に識別するデータであり、IDデータ1182は(たとえば、その他の種類のアタッチメントが装置で用いられるときに)アタッチメントの種類を識別するデータである。使用データ1184は、たとえば、以下でより詳細に示すように、外科用アタッチメント100のアンビルアセンブリ112が収縮または伸長された回数、または外科用アタッチメント100のステープルプッシャ220が前進(advance)、または留めた(fired)回数など、特定のアタッチメントの使用量を表す。
【0035】
可撓性軸20の遠位端24に取付け可能な外科用アタッチメント100は、一回または複数回使用するよう設計および構成することができることは理解されるべきである。外科用アタッチメント100はまた、所定回数使用するよう設計および構成することもできる。したがって、使用データ1184は、外科用アタッチメント100が使用されたかどうか、および使用回数が最大許容使用回数を超えたかどうかを確認するために使用することができる。以下でより詳細に説明するように、最大許容使用回数に到達した後に外科用アタッチメント100の使用を試みると、エラー状態が発生することになる。
【0036】
図6(b)を再び参照すると、本発明の例示的実施形態に従って、制御装置外科用アタッチメント100が可撓性軸20に最初に結合されたときに、制御装置1122が、外科用アタッチメント100の記憶装置1174からIDデータ1182を読み取るように構成されている。記憶装置1174は、データ伝送ケーブル38の配線1120を介して制御装置装置1122に電気的かつデータ転送が可能なように接続されている。制御装置1122は、読み取ったIDデータ1182に基づいて、可撓性軸20に結合された外科器具またはアタッチメントの種類に対応する動作プログラムまたはアルゴリズムを記憶装置1130から読み取る、または選択するように構成されている。記憶装置1130は、外科器具またはアタッチメントの利用可能な種類それぞれに対する動作プログラムまたはアルゴリズムを格納するよう構成されており、制御装置1122は、取り付けられた外科器具またはアタッチメントの記憶装置1174から読み取られたIDデータ1182に従って、記憶装置1130から動作プログラムまたはアルゴリズムを選択し及び/又は読み取る。上記のように、記憶装置1130は取外し式のROMコンポーネント1132及び/又はRAMコンポーネント1134を包含してよい。このようにすることによって、記憶装置1130に格納された動作プログラムまたはアルゴリズムは、必要に応じて更新、追加、削除、改善または修正することができる。記憶装置1130に格納された動作プログラムまたはアルゴリズムは、たとえば使用者の特殊な必要性に応じて部分的に変更できるようにすることができる。動作プログラムまたはアルゴリズムの部分的変更を容易にする
ために、たとえばキーボード、マウス、ポインティングデバイス、タッチスクリーンなどのデータ入力装置を、たとえばデータコネクタポートを介して記憶装置1130に接続することができる。代替的にまたは追加的に、動作プログラムまたはアルゴリズムは、電気機械式外科システム10から遠隔的に、記憶装置1130の内部にカスタマイズし、事前プログラムすることができる。シリアル番号データ1180及び/又は使用データ1184はまた、複数の動作プログラムまたはアルゴリズムのうちのどれが記憶装置1130から読み取られる、または選択されるかを決定するために使用することもできることは理解されるべきである。動作プログラムまたはアルゴリズムは、代替的に外科用アタッチメント100の記憶装置1174内に格納し、データ伝送ケーブル38を介して制御装置1122に伝送することができることは理解されるべきである。適切な動作プログラムまたはアルゴリズムが、制御装置1122によって読み取られる、もしくは選択されるか、または制御装置1122に伝送されると、使用者が配線式RCU1150および/または無配線RCU1148を介して実行した操作に従って、制御装置1122によって動作プログラムまたはアルゴリズムが実行される。上記に示したように、制御装置1122は、第1、第2、第3、第4および第5のモータ76、80、84、90、96に配線1116、1118、1124、1126、1128のそれぞれを介して電気的かつデータ転送が可能なように接続されており、読み取られ、選択された、または伝送された動作プログラムまたはアルゴリズムに従って、これらのモータ76、80、84、90、96を、配線1116、1118、1124、1126、1128のそれぞれを介して制御する。
【0037】
ここで図6(e)を参照すると、無線RCU1148の概略図が示されている。無線RCU1148は、四方ロッカー(four−way rocker)1310の下に配置
された複数のスイッチ1302、1304、1306、1308を有するステアリング制御装置1300を含む。ロッカー1310を介してスイッチ1302、1304を操作すると、第1および第2のステアリングケーブル34、35の動作が第3のモータ84を介して制御される。同様に、ロッカー1310を介してスイッチ1306、1308を操作すると、第3および第4のステアリングケーブル36、37の動作が第4のモータ92を介して制御される。ロッカー1310およびスイッチ1302、1304、1306、1308は、スイッチ1302、1304を操作すると可撓性軸20が南北方向に操作され、スイッチ1306、1308を操作すると可撓性軸20が東西方向に操作されるように配置されていることは理解されよう。本明細書における北、南、東、西とは、相対座標系に対するものである。代替的に、デジタルジョイスティック、アナログジョイスティックなどを、ロッカー1310およびスイッチ1302、1304、1306、1308の代わりに設けることができる。また、電位差計またはその他の種類の起動装置をスイッチ1302、1304、1306、1308の代わりに使用することもできる。
【0038】
無線RCU1148はステアリング係合/解放スイッチ1312をさらに含み、そのステアリング係合/解放スイッチ1312を操作すると、選択的にステアリング機構に係合したり、ステアリング機構を解放したりするよう第5のモータ96の動作が制御される。無線RCU1148はまた、第1および第2のスイッチ1316、1318を有する二方ロッカー1314を含み、第1および第2のスイッチ1316、1318は二方ロッカー1314によって操作可能とされている。これらのスイッチ1316、1318を操作すると、電気機械式外科システム10及び、取り付けられた外科用アタッチメントに対応する動作プログラムまたはアルゴリズムがある場合はその動作プログラムまたはアルゴリズムに従って外科用アタッチメント100など可撓性軸20に取り付けられた外科用アタッチメントの特定の機能が制御される。たとえば、外科器具が、図1に示し以下で説明するような外科用アタッチメント100である場合、二方ロッカー1314を操作すると、外科用アタッチメント100のアンビルアセンブリ112の伸長および収縮を制御することができる。無線RCUにはさらに別のスイッチ1320が設けられており、このスイッチ1320を操作すると、電気機械式システム10及び、取り付けられた外科用アタッチメ
ントに対応する動作プログラムまたはアルゴリズムがある場合はその動作プログラムまたはアルゴリズムに従って可撓性軸20に取り付けられた外科用アタッチメントの動作をさらに制御することができる。たとえば、外科用アタッチメント100が可撓性軸20に取り付けられているとき、スイッチ1320を操作すると、ステープルプッシャ220の前進、または発射(firing)のシーケンスを開始することができる。
【0039】
無線RCU1148は制御装置1322を含み、この制御装置1322は、配線1324を介してスイッチ1302、1304、1306、1308に、配線1326を介してスイッチ1316、1318に、配線1330を介してスイッチ1320に、電気的かつデータ転送が可能なように接続される。無線RCU1148は、フロントパネル15の表示器18a、18bに対応する表示器18a’、18b’と、フロントパネル15の表示装置16に対応する表示装置16’を含むことができる。これらが設けられる場合、表示器18a’、18b’は、各配線1332、1334を介して制御装置1322に電気的かつデータ転送が可能なように接続され、表示装置16’は配線1336を介して制御装置1322に電気的かつデータ転送が可能なように接続される。制御装置1322は配線1340を介してトランシーバ1338に電気的かつデータ転送が可能なように接続され、トランシーバ1338は配線1344を介して受信機/送信機1342に電気的かつデータ転送が可能なように接続される。図示はしないが、電池などの電源を無線RCU1148内に設け、この無線RCU1148に電源供給することができる。このように、無線RCU1148を使用して、電気機械式外科システム10と、可撓性軸20に取り付けられた任意の外科用アタッチメント100との動作を、無線リンク1160を介して制御することができる。
【0040】
無線RCU1148は、配線1349を介して制御装置1322に接続されたスイッチ1346を含むことができる。スイッチ1346を操作すると、データ信号が無線リンク1160を介して送信機/受信機1146に伝送される。このデータ信号は、無線RCU1148を一意的に識別する識別データを含む。この識別データは、電気機械式外科システム10が無許可で操作されることを防止するため、および他の無線RCUが電気機械式外科システム10の動作を干渉することを防止するために、制御装置1122によって使用される。無線RCU1148と電気機械式外科システム10との間の以降の通信ではそれぞれ、識別データを含めることができる。このようにして、制御装置1122は複数の無線RCU間を識別することができ、それによって単一の識別可能な無線RCU1148のみが、電気機械式外科システム10と可撓性軸20に取り付けられた任意の外科用アタッチメントとを制御することができる。
【0041】
エンコーダ1106、1108からの出力信号に従って測定された、可撓性軸20に取り付けられた外科用アタッチメント100の構成要素の位置に基づいて、制御装置1122は、取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムによって規定された、電気機械式外科システム10の機能を選択的に有効化または無効化することができる。たとえば、外科用アタッチメントが図1に示す外科用アタッチメント100である場合、スイッチ1320の操作によって制御されるステープル留め機能は、アンビルアセンブリ112とステープルおよび刃の部分106との間の空間または空隙が許容範囲内であると判断される場合を除いては無効化される。アンビルアセンブリ112とステープルおよび刃の部分106との間の空間または空隙は、先により詳細に説明したように、エンコーダ1106、1108からの出力信号に基づいて判断される。スイッチ1320自体は依然として動作可能であるが、制御装置1122は、空間または空隙が許容範囲内であると判断されない限り、対応する機能を実施することができないことは理解されるべきである。
【0042】
ここで図6(f)を参照すると、配線式RCU1150の概略図が示されている。この
例示的実施形態において、配線式RCU1150は、無線RCU1148と実質的に同じ制御要素を含み、そのような要素の更なる説明は省略する。同じ要素は、図6(f)において一重引用符(prime)を添えて示されている。電気機械式外科システム10と可撓性軸20に取り付けられた任意の外科用アタッチメントとは、配線式RCU1150によって及び/又は無線RCU1148によって制御することができることは理解されるべきである。たとえば無線RCU1148における電池障害の場合には、配線式RCU1150を使用して、電気機械式外科システム10と可撓性軸20に取り付けられた任意の外科用アタッチメント100との機能を制御することができる。
【0043】
先に説明したように、ハウジング14のフロントパネル15は表示装置16および表示器18a、18bを含む。表示装置16は、LCD表示装置など、英数字表示装置を含むことができる。表示装置16はまた、スピーカ、ブザーなど、音声出力装置を含むことができる。表示装置16は、可撓性軸20に取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムに従って、制御装置1122によって操作および制御される。外科用アタッチメントがそのように取り付けられていない場合、既定の動作プログラムまたはアルゴリズムが、制御装置1122によって読み込まれ、選択され、または制御装置1122に伝送され、それによって表示装置16の動作、ならびに電気機械式外科システム10のその他の特徴および機能が制御される。図1に示す外科用アタッチメント100が可撓性軸20に取り付けられている場合、先により詳細に説明したように、表示装置16は、たとえば、エンコーダ1106、1108の出力信号に従って測定された、アンビルアセンブリ112とステープルおよび刃の部分106との間の空隙を示すデータを表示することができる。
【0044】
同様に、表示器18a、18bは、可撓性軸20に取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムに従って、制御装置1122によって操作および制御される。表示器18a及び/又は表示器18bは、スピーカ、ブザーなどの音声出力装置、及び/又はLED、ランプ、ライトなどの視覚的表示器を包含してよい。図1に示す外科用アタッチメント100が可撓性軸20に取り付けられている場合、表示器18aは、たとえば、電気機械式外科システム10が電源オンの状態にあることを示すことができ、表示器18bは、たとえば、先により詳細に説明したように、アンビルアセンブリ112とステープルおよび刃の部分106との間の空隙が許容範囲内にあるかどうかを示すことができる。2つの表示器18a、18bのみについて説明したが、任意の個数の付加的な表示器を必要に応じて設けることができることは理解されるべきである。さらに、単一の表示装置16について説明したが、任意の個数の付加的な表示装置を必要に応じて設けることができることは理解されるべきである。
【0045】
無線RCU1150の表示装置16’および表示器18a’、18b’と、配線式RCU1148の表示装置16”および表示器18a”、18b”は、可撓性軸20に取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムに従って、制御装置1322、1322’のそれぞれによって同様に操作および制御される。
【0046】
以下では、たとえば図1に示した外科用アタッチメント100について、本発明の様々な実施形態に従って説明する。
【0047】
図7(a)から7(f)は、本発明の一実施形態による外科用アタッチメント100の取手部102の様々な図である。たとえば、図7(a)はハウジング301を含む取手部102の正面斜視図であり、図7(b)はその取手部102の背面斜視図である。ハウジング301の近位端301aには、ギヤハウジング302が配設される。ハウジング301の遠位端301bには、継手ブロック305が配設される。ギヤハウジング302からは、クイックコネクト継手304および伸長ロッド308が延在する。
【0048】
クイックコネクト継手304はギヤハウジング302に装着されており、一組のばねを介するなどして付勢することができる。ギヤハウジング302は、第1の駆動ソケット304aおよび第2の駆動ソケット304bを含む。図7(c)は、取手部102の分解正面斜視図である。図7(c)に示すように、第1の駆動ソケット304aは第1の入力要素306aを含み、その入力要素306aの一方の端部3061はギヤハウジング302の開口部3021を介して延在し、その入力要素306aの他方の端部3062はスパーギヤ歯3063を含む。第2の駆動ソケット304bは第2の入力要素306bを含み、その入力要素306bの一方の端部3064はギヤハウジング302の第2の開口部3022を介して延在し、その入力要素306bの他方の端部3065はスパーギヤ歯3066を含む。
【0049】
伸長ロッド308は、ギヤハウジング302内の伸長ロッド開口部3025を介して延在する。伸長ロッド308の遠位端308bは、伸長ロッド開口部3025よりも大きいフランジ3081を有し、その結果、伸長ロッド308のフランジ3081はギヤハウジング302内に保持される。伸長ロッド308のフランジ3081はスパーギヤ310の一方の側面に当接し、スパーギヤ310はギヤハウジング302の内部窪み3023内に着座する。スパーギヤ310は、第1の入力要素306aのスパーギヤ歯3063に対応するスパーギヤ歯3101をその外周に沿って配置している。伸長ロッド308に対して同軸に配置された雄ねじロッド312が、スパーギヤ310の雌ねじ孔3102を介して延在している。ロッド312は、継手ブロック305の第1の開口部3052内に配置された継手要素314に結合されている。ロッド継手314は、可撓性軸104の第1の駆動軸104aに接続することができる。
【0050】
また、ギヤハウジング302の内部窪み3024内にはスパーギヤ318が着座している。スパーギヤ318は、第2の入力要素306bのスパーギヤ歯3066に対応するスパーギヤ歯3181をその外周に沿って配置している。スパーギヤ318は、スパーギヤ318を通って延在する孔3182を有する。スパーギヤ318の孔3182内には、軸駆動要素316の第1の端部3161が回転しないように係合される。軸駆動要素316の第2の端部3162は、可撓性軸104の第2の駆動軸104bと回転しないように係合するよう構成されており、可撓性軸104は継手ブロック305の遠位面3051内の第2の開口部3053を介して延在する。
【0051】
図7(d)は、図7(a)に示す取手部102の頂面図である。図7(e)は、図7(d)に示す線A−Aに沿う取手部102の側断面図である。図7(f)は、図7(d)に示す線B−Bに沿う取手部102の側断面図である。
【0052】
図8は、本発明の一実施形態による、外科用アタッチメント100の切断およびステープル留め用部品103の斜視図である。図8に示し、かつ先に説明したように、切断およびステープル留め用部品103はステープルおよび刃の部分106を含む。ステープルおよび刃の部分106の中心に配設された開口部を介して、トロカール軸108が軸方向に延在する。トロカール軸108は可撓性を備えることができる。一実施形態において、トロカール軸108はケーブルである。トロカール軸108の遠位端108aには、トロカール110が配設されている。トロカール110は、組織の区画を押進するよう構成された鋭利なまたは先細の端部を有している。さらに、トロカール110は、好ましくはトロカール110を着脱可能に固定するためのアンビルアセンブリのスロット内に挿入可能とすることによって、アンビルアセンブリ112と係合するように構成されており、このようにして、以下でより詳細に説明するように、トロカール110に取り付けられたトロカール軸108はアンビルアセンブリ112に着脱可能に固定されている。外科用アタッチメント100は、以下でより詳細に示すように、トロカール軸108とこのトロカール軸
108に取り付けられたアンビルアセンブリ112とを、ステープルおよび刃の部分106に対して、伸長させたり収縮させたりするなど選択的に移動させることができるように構成されている。具体的には、トロカール軸108は、その端部に配設されたトロカール110を有し、それぞれ遠位方向および近位方向など第1および第2の方向へ移動することによって、ステープルおよび刃の部分106に対して所望の距離を伸長可能かつ収縮可能である。
【0053】
図9は、本発明の一実施形態による切断およびステープル留め用部品103を示す斜視図である。図9は、組み立てられかつ部分的に閉じた位置にある切断およびステープル留め用部品103を示している。具体的には、図9は、ステープルおよび刃の部分106に対して部分的に収縮した位置にあるアンビルアセンブリ112を示している。
【0054】
図10(a)は、本発明の一実施形態によるアンビルアセンブリ112の構成要素を示す斜視図である。図10(a)は分解した状態にあるアンビルアセンブリ112を示している。図10(a)に示すように、アンビルアセンブリ112はアンビルエンドキャップ202を含む。アンビルエンドキャップ202は、軸方向に配置され、中心に配設された開口部2021を有する。アンビルエンドキャップ202はまた、エンドキャップ202の遠位側2025にある半径方向に配設されたスロット2022と、アンビルエンドキャップ202の近位側2026にある把持面2023とを含む。把持面2023は、刃収容部(bladerepository)2024を形成する窪み状部分を有する。把持面2023はまた、ステープルガイド2026を形成する。
【0055】
アンビルアセンブリ112はまた、アンビルエンドキャップ202のスロット2022に断面的に対応するピン204を含む。アンビルアセンブリ112はまた、中空アンビルスリーブ208を含む。アンビルスリープ208の遠位端2081は、アンビルエンドキャップ202の開口部2021に断面的に対応する。さらに、アンビルスリーブ208の遠位端2081は、アンビルピン204に断面的に対応する開口部2082を形成している。アンビルスリーブ208の近位端2084には、アンビルスリーブ208の周囲で円周方向に延在し、アンビルスリーブ208の最も近位側の端部に配置された、複数の半径方向に延在する歯部2087の半径を含む、アンビルスリーブ208のその他の部分の半径よりも小さい半径を有する溝2086が形成される。アンビルスリーブ208の近位端2084はまた、溝2086および歯2087を通って延在する、たとえば4つなど複数の軸方向スロット2088を形成し、それによってアンビルスリーブ208の近位端2084を半径方向に圧縮することを可能にする。アンビルスリーブ208はまた、長手方向に延在する1つまたは複数のキー2085をその外面に備えている。
【0056】
アンビルアセンブリ112はまた、アンビル伸長ロッド206を含む。アンビル伸長ロッド206は、扁平にすることができかつ開口部2062を形成する遠位端2061を有する。アンビル伸長ロッド206はまた、円形でありかつアンビルスリーブ208の溝2086の内径に断面的に対応する中央領域2063を有する。アンビル伸長ロッド206の遠位端2061は、アンビルスリーブ208の溝2086の内径よりも断面的に大きい。アンビル伸長ロッド206はまた、トロカール受容スロット2065を形成する近位端2063を有する。
【0057】
図10(b)は、本発明の一実施形態によるステープルおよび刃の部分106の構成要素の一部を示す斜視図である。図10(b)は分解した状態にある構成要素を示している。図10(b)に示すように、ステープルおよび刃の部分106は中空のアンビルスリーブガイド210を含む。アンビルスリーブガイド210の内部表面は1つまたは複数のキー溝2101を含む。アンビルスリーブガイド210の外部表面はリップ2102を含み、その結果、アンビルスリーブ案内部210の近位端2103は、アンビルスリーブガイ
ド210の遠位端2104よりも大きい半径を有する。
【0058】
また、ステープルおよび刃の部分106は外部ハウジングスリーブ212を含む。外部ハウジングスリーブ212は、その遠位端2122に1つまたは複数の開口部2121を有し、外部ハウジングスリーブ212の遠位端2124に半径方向内方に延在するリップ2123を有する。ステープルおよび刃の部分106はまた、ステープルカートリッジ214を含む。ステープルカートリッジ214は、ステープル2142がその中に格納される、軸方向に配設された複数のステープル受容スロット2141を形成する。図10(b)に示す実施形態において、ステープル受容スロット2141は、半径方向に離隔した2列でステープルカートリッジ214の周囲に円周方向に配設され、第1の列のステープル受容スロット2141は第2の列のステープル受容スロット2141の外側に位置する。ステープルカートリッジ214はまた、ステープルカートリッジ214の遠位端2147の近傍に配置された、半径方向内方に延在するリップ2145と、ステープルカートリッジ214の近位端2144の近傍に配設された、半径方向外方に延在するリップ2143とを含む。さらに、ステープルカートリッジ214の遠位端2147は把持面2146を形成する。
【0059】
また、ステープルおよび刃の部分106は脆性の刃保護リング216を備え、その内部にはスロット2161が形成されている。さらに、ステープルおよび刃の部分106は刃218を含む。刃218は、その遠位端2184に沿って円周方向に延在する切断へり2183を有する。さらに、刃218は、その近位端2182で半径方向内方に延在するタブまたはリップ2181を画定する。
【0060】
ステープルおよび刃の部106はまた、ステープルプッシャ220を含む。ステープルプッシャ220は軸方向に配設された複数の押歯2201を有し、その複数の押歯2201はそれぞれ、ステープラカートリッジ214のステープル受容スロット2141と対応するとともに整列する。ステープルプッシャ220はまた、その外部表面上にキー2202を含む。
【0061】
ステープルおよび刃の部分106はまた、首部2221およびフランジ部2222を有するステープルプッシャキャリッジ要素222を含み、その首部2221はフランジ部2222に対して遠位方向に軸方向へ延在する。首部2221の内側表面はねじ山2223を含み、首部2221の外側表面には円周方向に配設された溝部2224が形成されている。さらに、フランジ2222の半径方向の最外縁部はキー2225を含む。
【0062】
図10(c)は、本発明の一実施形態による、分解した状態のステープルおよび刃の部分106の残りの構成要素を示す斜視図である。図10(c)に示すように、ステープルおよび刃の部106はまたスプリットリング224を含む。スプリットリング224は一対の半円リング部2241および2242を含み、これらの半円リングを輪の形状に配置すると一対のキー溝2243および2244をこれら半円リングの間に形成する。ステープルおよび刃の部分106はまた、座金226を含む。ステープルおよび刃の部分106はまた、首部2281およびフランジ部2282を有するスラスト要素228を含み、その首部2281はフランジ部2282に対して遠位方向に軸方向へ延在する。首部2281の内側には孔部2283が画定される一方で、首部2281の外側表面は、ステープルプッシャキャリッジ要素222の首部2221の内側表面に配置されたねじ山2223に対応するねじ山2284が形成されている。スラスト要素228のフランジ2282は、その遠位方向に向いた表面内の1つまたは複数の孔部2285と、例えば円形の断面を有する近位方向に延在するピン2286とを含む。
【0063】
また、ステープルおよび刃の部分106は第1のスパーギヤ230を含む。第1のスパ
ーギヤ230には、スラスト要素228のピン2286に断面的に対応する内部孔2301が形成される。また、第1のスパーギヤ230は、円周方向に配設されたスパーギヤ歯2302を含む。また、ステープルおよび刃の部分106は座金232および内部ハウジングスリーブ234を含む。内部ハウジングスリーブ234は、内部ハウジングスリーブ234の遠位端2342に第1の内径を有する内部孔2341を含む。内部孔2341は、半径方向内方に延在するリップ2345に向かって近位側に延在し、このリップ2345の位置で内部孔2342の内径が縮径される。内部孔2342は、半径方向内方に延在する第2のリップ2346に向かって近位側にさらに延在し、このリップ2346の位置で内部孔2342の内径が再び縮径される。第2のリップ2346に向かって近位側には、内部ハウジングスリーブ234の内側表面に沿って円周方向に延在するギヤ歯2347がある。例えば、ギヤ歯2347に対して近位方向の近位端2343は、滑らかな内側表面を有し、その中に形成された1つまたは複数の半径方向の開口部2344を有する。
【0064】
ステープルおよび刃の部分106はまた、首部2361およびフランジ部2362を有するサンギヤ要素236を含み、この首部2361はフランジ部2362に対して遠位方向に軸方向へ延在する。首部2361の内側には孔部2363が画定される一方で、首部2361の外側表面は、第1のスパーギヤ230のギヤ歯2364に対応する、円周方向に配設されたギヤ歯2302を有する。フランジ部2362は、例えば円形の断面を有する近位方向に延在するピン2366を含む。ステープルおよび刃の部分106はまた、座金238を含む。
【0065】
また、ステープルおよび刃の部分106は内部孔2401を有する第1のプラネタリギヤ240を含む。第1のプラネタリギヤ240の外側表面は、円周方向に配設されたギヤ歯2402を有する。また、ステープルおよび刃の部分106は内部孔2421を有するサンギヤ242を含む。サンギヤ242の外側表面は、第1のプラネタリギヤ240のギヤ歯2402に対応する、円周方向に配設されたギヤ歯2422を有する。また、ステープルおよび刃の部分106はタブ2441を有する座金244を含む。また、ステープルおよび刃の部分106は内部孔2461を有する第2のプラネタリギヤ246を含む。第2のプラネタリギヤ246の外側表面は、サンギヤ242の円周方向に配設されたギヤ歯2422に対応する、円周方向に配設されたギヤ歯2462を有する。
【0066】
また、ステープルおよび刃の部分106は入力要素248を含む。入力要素248の遠位端2481は、例えば方形の断面を有することができる内部孔2483を有する。入力要素248の遠位端2481の外部表面には、第2のプラネタリギヤ246の外側表面上の円周方向に配設されたギヤ歯2462に対応する、円周方向に配設されたギヤ歯2482が設けられている。入力要素248の近位端2484は円形の外周を有し、内部孔2485を有する。
【0067】
また、ステープルおよび刃の部分106は、中心孔2501と、この中心孔2501に対して半径方向に偏移した第2の孔2502と、ピン2504が遠位方向にそこから延在する溝2503とを有するハウジングリアエンドキャップ250を含む。また、ハウジングリアエンドキャップ250は外径方向のリップ2505を含む。外径方向のリップ2505に対して遠位側には、円形の外周表面2507内に形成された少なくとも1つの開口部2506が配置されている。また、ハウジングリヤエンドキャップ250は、中心孔2501に通じる1つまたは複数のキー溝2509をその近位端に含む。
【0068】
また、ステープルおよび刃の部分106は中心リヤエンドキャップスリーブ252を含み、この中心リヤエンドキャップスリーブ252は、中心リヤエンドキャップスリーブ252を通って配設された孔2521を有する。中心リヤエンドキャップスリーブ252の遠位端2522において、孔2521は半径方向内方に延在するリム2523を形成する
。中心リヤエンドキャップスリーブ252の近位端2524には、対向して配設されたキー溝2525が設けられている。
【0069】
また、ステープルおよび刃の部分106は保持スリーブ254を含み、保持スリーブ254は、保持スリーブ254を通って配設された孔2541を有する。保持スリーブ254の近位端2542には、中心リヤエンドキャップスリーブ252の近位端2524に配置された、対向配置されたキー溝2525と、リヤハウジングエンドキャップ250のキー溝2509とに対応する、対向配置されたキー2543が設けられている。
【0070】
図11(a)は本発明の一実施形態による切断およびステープル留め用部品103を示す上断面図であり、図11(b)はその切断およびステープル留め用部品103を示す側断面図である。図11(a)および11(b)は、以下でより詳細に述べる、組み立てられかつ部分的に収縮した位置にある切断およびステープル留め用部品103を示している。図11(a)および11(b)に示すように、アンビルスリーブ208の遠位端2081は、アンビルエンドキャップ202内の、対応した、中心に配設された開口部2021に挿入される。アンビルピン204は、エンドキャップ202の半径方向に配設されたスロット2022を通じて挿入されると共に、アンビルスリーブ208の遠位端2081内の対向して配設された開口部2082を通じて挿入され、その結果、アンビルエンドキャップ202はアンビルエンドスリーブ208に対して軸方向にかつ回転可能に固定される。アンビル伸長ロッド206の遠位端2061は、アンビルスリーブ208の近位端2084において溝2086内に軸方向に保持される。アンビルスリーブ208は、アンビルスリーブガイド210の内側で軸方向に摺動可能に保持される。アンビルスリーブ208は、アンビルスリーブ208のキー2085がアンビルスリーブガイド210のキー溝2101内に係合することによって、アンビルスリーブガイド210に対して回転するのを防止される。
【0071】
中心リヤエンドキャップスリーブ252は、ハウジングリヤエンド250の中心開口部2501を通じて、アンビルスリーブガイド210の近位端2103内へ延在している。図示した位置において、中心リヤエンドキャップスリーブ252のリム2523は、アンビルスリーブ208の溝2086内に係合し、それによって中心エンドキャップスリーブ252とアンビルスリーブ208とを互いに軸方向に固定する。中心リヤエンドキャップスリーブ252の孔部2521内には、保持スリーブ254が挿入される。保持スリーブ254のキー2543は、保持スリーブ254と中心リヤエンドキャップスリーブ252とハウジングリヤエンドキャップ250との間の相対的な回転を防止するために、中心リヤエンドキャップスリーブ252のキー溝2525とハウジングリヤエンドキャップ250のキー溝2509とに係合する。
【0072】
入力要素248はハウジングリヤエンドキャップ250の第2の開口部2502内で回転可能に保持される。入力要素248の歯部2482は、第2のプラネタリギヤ246の円周方向に配設された歯部2462と噛合い係合し、この第2のプラネタリギヤ246は、ハウジングリヤエンドキャップ250の溝2503から遠位側に延在するピン2504に回転可能に取り付けられる。第2のプラネタリギヤ246の円周方向に配設された歯部2462はまた、サンギヤ242の円周方向に配設された歯部2422と噛合い係合する。サンギヤ242は、その内部孔2421を介してアンビルスリーブガイド210の近位端2103に回転可能に取り付けられる。
【0073】
また、サンギヤ242の円周方向に配設された歯部2422は、第1のプラネタリギヤ240の円周方向に配設された歯部2402と噛合い係合する。第1のプラネタリギヤ240は、サンギヤ要素236のフランジ部2362から近位側に延在するピン2361に回転可能に取り付けられる。また、第1のプラネタリギヤ240の円周方向に配設された
歯部2402は、内部ハウジングスリーブ234の内側表面の周囲で円周方向に延在するギヤ歯2347と噛合い係合する。内部ハウジングスリーブ234は、外部ハウジングスリーブ212、内部ハウジングスリーブ234およびハウジングリヤエンドキャップ250それぞれの位置合わせされた開口部2121、2344および2506に例えばピンまたはねじのような締結具を挿入することによって、ハウジングリヤエンドキャップ250および外部ハウジングスリーブ212に対して回転可能にかつ軸方向に固定される。
【0074】
サンギヤ要素236は、その内部孔2363を介してアンビルスリーブガイド210に回転可能に取り付けられる。サンギヤ要素236の首部2361の外側表面にある円周方向に配設されたギヤ歯2364は、第1のスパーギヤ230の円周方向に配設されたギヤ歯2302と噛合い係合する。第1のスパーギヤ230は、第1のスパーギヤ230の内部孔2301の中にスラスト要素228の近位方向に延在するピン2286を挿入することによって、スラスト要素228に回転可能に取り付けられる。また、第1のスパーギヤ230の円周方向に配設された歯部2302は、内部ハウジングスリーブ234の内側表面の周囲で円周方向に延在するギヤ歯2347と噛合い係合する。
【0075】
スラスト要素228は、アンビルスリーブガイド210がスラスト要素228の内部孔2283内に嵌合することによって、アンビルスリーブガイド210に回転可能に装着される。座金232は、スラスト要素282のフランジ2282の近位表面と内部ハウジングスリーブ234の第2のリップ2346との間に存在し、座金226は、スラスト要素282のフランジ2282の遠位表面とステープルカートリッジキャリヤ要素222のフランジ2222との間に存在する。
【0076】
ステープルプッシャキャリッジ要素222は、ステープルプッシャキャリッジ要素222の首部2221の内側表面に配置されたねじ山2223が、スラスト要素228の首部2281の外側表面に配置されたねじ山2284と螺合するように、スラスト要素228に装着される。ステープルプッシャキャリッジ要素222のキー2225は、スプリットリング224によって形成されたキー溝内に係合し、それによってステープルプッシャキャリッジ要素222をスプリットリング224に対して軸方向に摺動可能とすることができる。スプリットリングは、内部ハウジングスリーブ234の遠位端2342の孔2341内に配置される。
【0077】
ステープルプッシャ220は、スプリットリング224内に配置され、スラスト要素228のフランジ2282に当接する。ステープルプッシャ220のキー2202は、スプリットリング224によって形成されたキー溝2243内に係合し、それによってステープルプッシャ220をスプリットリング224に対して軸方向に摺動可能とすることができる。ステープルプッシャ220の押歯2201は、遠位方向に延在し、ステープルカートリッジ214のステープル受容スロット2141に位置を合わせる。。
【0078】
ステープルカートリッジ214はステープルプッシャ220に対して遠位側に配置され、外部ハウジングスリーブ212の内側に保持される。以下でより詳細に述べるように、ステープルカートリッジ214は、図11(a)および11(b)に示す位置からステープルカートリッジ214の半径方向外方に延在するリップ2143が、外部ハウジングスリーブ212の半径方向内方に延在するリップ2123に当接するまで、外部ハウジングスリーブ212内で遠位方向へ軸方向に移動可能である。
【0079】
ステープルプッシャ220とステープルプッシャキャリッジ要素222との間には、刃部218が配置される。刃部の遠位端2182に配置された、半径方向内方に延在するタブまたはリップ2185は、ステープルプッシャキャリッジ要素222の首部2221の外部表面に配置された溝2224内に係合する。刃部218の切断へり2183は、脆性
の刃保護リング216のスロット2161内に収容される。脆性の刃保護リング216は、ステープルカートリッジ214の半径方向内方に延在するリップ2144に軸方向に当接する。
【0080】
動作時には、外科用アタッチメント100は取手部102のクイックコネクト継手304を介して可撓性軸20に取り付けられ、その結果、可撓性軸20の第1の回転可能な駆動軸30は取手部102の第1の入力要素306aに、たとえば回転しないように結合され、可撓性軸20の第2の回転可能な駆動軸32は、取手部102の第2の入力要素306bに、たとえば回転しないように結合される。初期には、外科用アタッチメント100のトロカール軸108は、外科用アタッチメント100を患者の体内に容易に挿入することができるよう、図9に示すような収縮した位置とすることができる。たとえば、この位置では、ステープルおよび刃の部分106は患者の口部の通路内に挿入することができる。制御装置1122は初期には把持モードで動作するよう構成することができる。把持モードにおいて、第1の回転可能な駆動軸30が、例えば近位端から見て時計回りの第1の方向に回転すると、入力要素306aが第1の方向に回転する。第1の入力要素306aのギヤ歯3063がスパーギヤ310のスパーギヤ歯3101と噛合い係合することによって、スパーギヤ310は、近位端から見て例えば半時計回りの第2の方向に回転する。スパーギヤ310が第2の方向に回転すると、スパーギヤ310の雌ねじ孔3102内にそのねじ山が係合するロッド312はハウジング部102内で軸方向に移動する。ロッド312の端部の継手要素314は、可撓性軸104の第1の駆動軸104aとたとえば回転しないように係合し、次いでこの第1の駆動軸104aは、切断およびステープル留め用部品103のステープルおよび刃の部分106を通じて延在するトロカール軸108と、たとえば回転しないように係合する。このようにして、その端部に配設されたトロカール110を有するトロカール軸108は、例えば遠位方向の第1の方向に移動することによって、ステープルおよび刃の部分106に対して所望の距離だけ伸長することができる。トロカール110は、ステープル留めが望ましい組織の区画を通って押進され、アンビルロッド伸長ロッド206のトロカール受容スロット2065内に挿入され、アンビル伸長ロッド206に対して軸方向に固定される。トロカール軸108は次いで、第1の回転可能な駆動軸30を反対方向に操作することによって収縮され、アンビル伸長ロッド206とアンビルアセンブリ112のその他の構成要素とをアンビルスリーブガイド210内に引き込む。
【0081】
第1の回転可能な駆動軸30が引き続き例えば第2の方向に回転することによって、トロカール軸108がさらに収縮させられるとき、アンビルスリーブ208のキー2085はアンビルスリーブガイド210内のキー溝2101と係合し、それによってアンビルアセンブリ112がステープルおよび刃の部分106に位置合わせされる。トロカール軸108がさらに収縮すると、アンビルスリーブ108は、中心リヤエンドキャップスリーブ252のリム2523がアンビルスリーブ208の溝2086内に着座するまで、アンビルスリーブガイド210内で近位側に移動する。中心リヤエンドキャップスリーブ252のリム2523がアンビルスリーブ208の溝2086内に着座するとき、アンビルアセンブリ112はステープルおよび刃の部分106に対して所定の位置で軸方向に係止される。本発明の一実施形態によれば、アンビルアセンブリ112は、アンビルエンドキャップ202の把持面2023がステープルカートリッジ214の把持面2146から約5mmの距離にあるとき、ステープルおよび刃の部分106に対して所定の位置で軸方向に係止される。
【0082】
アンビルアセンブリ112がステープルおよび刃の部分106に対して所定位置に軸方向に係止されると、制御装置1122は第1の回転可能な駆動軸30が第2方向に回転するのを停止することができる。制御装置1122は次いで、操作の発射(firing)モードに移行することができる。操作の発射モードにおいては、第2の回転可能な駆動軸
32は例えば時計回りの第1の方向に回転することができ、それによって入力要素306bが第1の方向に回転する。入力要素306bのギヤ歯3066がスパーギヤ318のスパーギヤ歯3181と噛合い係合することによって、スパーギヤ318は、例えば反時計回りの第2の方向に回転する。スパーギヤ318が第2の方向に回転すると、軸駆動要素316と、軸駆動要素316に回転しないように結合された可撓性軸104の第2の駆動軸104bとが第2の方向に回転する。それによって可撓性軸104の第2の駆動軸104bが回転すると、それが回転しないように連結されたステープルおよび刃の部分106の入力要素248もまた第2の方向に回転する。したがって、入力要素248はハウジングリヤエンドキャップ250の第2の開口部2502内で回転する。入力要素248の歯部2482が第2のプラネタリギヤ246の円周方向に配設された歯部2462と噛合い係合することによって、入力要素248が第2の方向に回転すると、ピン2504上の第2のプラネタリギヤ246が第1の方向に回転する。さらに、第2のプラネタリギヤ246の円周方向に配設された歯部2462がサンギヤ242の円周方向に配設された歯部2422と噛合い係合することによって、第2のプラネタリギヤ246が第1の方向に回転すると、サンギヤ242がアンビルスリーブガイド210の近位端2103の周囲で第2の方向に回転する。
【0083】
サンギヤ242の円周方向に配設された歯部2422が第1のプラネタリギヤ240の円周方向に配設された歯部2402と噛合い係合することによって、サンギヤ242がアンビルスリーブガイド210の近位端2103の周囲で第2の方向に回転すると、サンギヤ要素236のフランジ部2362から近位側に延在するピン2361上の第1のプラネタリギヤ240が第1の方向に回転する。第1のプラネタリギヤ240の円周方向に配設された歯部2402が内部ハウジングスリーブ234のギヤ歯2347と噛合い係合することによって、および内部ハウジングスリーブ234がステープルおよび刃の部分106内に回転可能に固定されていることから、第1のプラネタリギヤ240が第1の方向に回転すると、第1のプラネタリギヤ240は内部ハウジングスリーブ234内で第2の方向に旋回(revolve)する。第1のプラネタリギヤ240は、サンギヤ要素236のフランジ部2362から近位側に延在するピン2361に装着されているため、第1のプラネタリギヤ240が第2の方向に旋回動作(revolvingmotion)すると、サンギヤ要素236はアンビルスリーブガイド210の周りを第2の方向に回転する。
【0084】
サンギヤ要素236の首部2361の外側表面上のギヤ歯2364が第1のスパーギヤ230のギヤ歯2302と噛合い係合することによって、サンギヤ236が第2の方向に回転すると、第1のスパーギヤ230が第1の方向に回転する。第1のスパーギヤ230の円周方向に配設されたギヤ歯2302が内部ハウジングスリーブ234のギヤ歯2347と噛合い係合することによって、および内部ハウジングスリーブ234がステープルおよび刃の部分106内に回転可能に固定されていることから、第1のスパーギヤ230が第1の方向に回転すると、第1のスパーギヤ230は内部ハウジングスリーブ234内で第2の方向に旋回する。さらに、第1のスパーギヤ230は、スラスト要素228のフランジ部2282から近位側に延在するピン2286に装着されているため、第1のスパーギヤ230が第2の方向に旋回動作すると、スラスト要素228はアンビルスリーブガイド210の周りを第2の方向に回転する。
【0085】
スラスト要素228がアンビルスリーブガイド210の周りを第2の方向に回転すると、ステープルプッシャキャリッジ要素222は、スラスト要素228の首部2281の外側表面に配置されたねじ山2284がステープルプッシャキャリッジ要素222の首部2221の内側表面に配置されたねじ山2223と螺合することによって、スラスト要素228に対して移動する。ステープルプッシャキャリッジ要素222のキー2225は、スプリットリング224によって形成されたキー溝内に係合するため、ステープルプッシャキャリッジ要素222はスプリットリング224内で遠位方向へ軸方向に摺動する。ステ
ープルプッシャキャリッジ要素222が遠位側に移動すると、ステープルプッシャ220もまた、スラスト要素228のフランジ2282がステープルプッシャ220と当接することにより、遠位方向に移動する。
【0086】
ステープルプッシャ220が遠位方向に移動すると、刃部218はステープルプッシャ220に沿って遠位方向に移動する。脆性の刃保護リング216のスロット2161内に収容された刃部218の切断へり2183によって、脆性の刃保護リング216は遠位側に移動する。脆性の刃保護リング216はステープルカートリッジ214の内方のリップ2144に軸方向に当接するため、脆性の刃保護リング216が遠位側に移動すると、ステープルカートリッジ214も遠位側に移動する。したがって、この動作の段階では、ステープルプッシャ220、刃部218、脆性の刃保護リング216およびステープルカートリッジ214は共に遠位側に移動する。ステープルカートリッジ214は、アンビルエンドキャップ202の把持面2023とステープルカートリッジ214の把持面2146との間で組織の区画(図示せず)をさらに把持するよう遠位側に移動する。組織の区画の厚さに応じて、ステープルカートリッジ214は、ステープルカートリッジ214のリップ2143が外部ハウジングスリーブ212の半径方向内方に延在するリップ2123に当接するまで、さらに遠位方向に移動することができる。
【0087】
ステープルカートリッジ214が遠位側に十分に移動して組織の区画を完全に把持すると、引き続き第2の回転可能な駆動軸32が回転することによって、ステープルプッシャ220、脆性の刃保護リング216および刃部218がさらに遠位側に移動する。脆性の刃保護リング216およびステープルカートリッジ214が、圧縮された組織の区画に接触することによって、さらに遠位方向へ移動することを妨げられた後も、ステープルプッシャ220および刃部218はこれらの構成要素に対して引き続き遠位方向に移動させられる。具体的には、刃部218がさらに遠位側に移動すると、刃部218の切断へり2183は脆性の刃保護リング216を貫通し、それによって把持されている組織の区画を切断する。これらの構成要素は、刃部218の切断へり2183が脆性の刃保護リング216を貫通し、それによって組織の区画を切断するよう約70ポンド以上の圧力が用いられ、それによって組織の区画が切断前に十分に把持されるように構成すると有利である。同時に、ステープルプッシャ220がさらに遠位側に移動すると、ステープルカートリッジ214のステープル受容スロット2141に位置合わせされたステープルプッシャ220の押歯2201は、ステープル受容スロット2141を通じて遠位側に移動し始める。このことによって、ステープルカートリッジ214のステープル受容スロット2141内に保持されたステープル2142は、ステープル2142が閉じられるまでの間、把持された組織の区画を押し進み、、アンビルエンドキャップ202の把持面2023のステープルガイド2026内に押し込まれる。
【0088】
ステープル2142が完全に閉じられると、組織の区画に対する把持力は第2の駆動軸32が反対の方向に回転することによって軽減することができる。通常、第2の駆動軸32が反対方向に回転するとき、スラスト要素228もまた、ステープルおよび刃の部分106の構成要素が逆方向に移動することによって、上述の方向とは逆の方向に回転させられ、それによってステープルプッシャキャリッジ要素222は、例えば近位側に移動して、収縮させられる。また刃部218は、刃部218のリップ2181がステープルプッシャキャリッジ要素222の首部2221の外部表面に配置された溝2224内に係合することによって、例えば近位側に移動して、収縮させられる。アンビルスリーブ202の把持面2023とステープルカートリッジ214の把持面2146との間の把持力が十分に減じられると、切断されステープル留めされた組織の区画が、アンビルエンドキャップ202の把持面2023とステープルカートリッジ214の把持面2146との間から除去され、外科用アタッチメント100を患者の体内から除去することができる。
【0089】
図12(a)から12(c)は、本発明の他の実施形態による切断およびステープル留め用部品の一部の構成要素を示している。具体的には、図12(a)は、ステープルおよび刃の部分4106を含む切断およびステープル留め要素4103の斜視図である。ステープルおよび刃の部分4106の中心に配設された開口部を通じて例えばケーブルのような可撓性のトロカール軸4108が軸方向に延在している。可撓性のトロカール軸4108の遠位端4108aには、トロカール受容スロット4065を形成するケーブル伸長要素4206が配設されている。トロカール受容スロット4065は、その近位端に広い部分4066、その遠位端に狭い部分4067を有する。
【0090】
また、切断およびステープル留め用部品4103はアンビルアセンブリ4112を含む。アンビルアセンブリ4112はアンビルエンドキャップ4202を含む。アンビルエンドキャップ4202は、アンビルエンドキャップ4202から近位側に延在するアンビルスリーブ4208を有する。アンビルスリーブ4208の最も近位方向の端部からは可撓ケーブル4212が延在しており、この可撓ケーブル4212は、この可撓ケーブル4212に取り付けられたトロカール4220を有している。トロカール4220は、例えば球面状の第1の部分4213を含み、円筒形のフィンガ4214がこの第1の部分4213から延在している。円筒形のフィンガ4214はトロカールチップ4215に向かって先細状とされている。
【0091】
図12(b)は、ケーブル伸長要素4206の付加的な特徴を示す側断面図である。具体的には、ケーブル伸長要素4206は軸方向に延在する中心孔4207を形成し、トロカール受容スロット4065の狭い部分4067と広い部分4066はその中心孔4207に連通している。中心孔4207内、かつトロカール受容スロット4065に対して近位方向には、ばねなどの付勢要素4250によって遠位方向に付勢されたプランジャ4251が配置されている。図12(b)に示すように、トロカールチップ4215は、トロカール4220の例えば球面状の第1の部分4213がトロカール受容スロット4065の狭い部分4067に対して近位方向に配置されるように、付勢されたプランジャ4251を押圧しかつ変位させるよう構成されている。
【0092】
図12(c)に示すように、例えば球面状のトロカール4220の第1の部分4213がトロカール受容スロット4065の狭い部分4067に対して近位側に配置されると、トロカール4220がトロカール受容スロット4065を通じ、中心孔4207内に下降する。次いでプランジャ4251が、トロカール4220の第1の部分4213を中心孔4207の広い部分4258と狭い部分4259との境界に着座させるように、付勢要素4250によって遠位方向に付勢される。中心孔4207の狭い部分4259は、トロカール軸4108がステープルおよび刃の部分4106に対して収縮させられたときにアンビルアセンブリ4112も収縮させられるように、トロカール4220を保持する。
【0093】
切断およびステープル留め用部品4103のこの実施形態では、トロカール軸4108をアンビルアセンブリ4112に結合することを容易にする配置が可能になる。具体的には、アンビルアセンブリ4112の可撓ケーブル4212および可撓性のトロカール軸4108によって、アンビルアセンブリ4112は可撓性のトロカール軸4108により容易に結合することが可能になる。たとえば、この配置では、アンビルアセンブリ4112は、そのような結合の前にアンビルアセンブリ4112を可撓性のトロカール軸4108と位置合わせすることを必要とせずに、及び/又はそのような結合の前にアンビルアセンブリ4112および可撓性のトロカール軸4108がその中に配置される組織リムを位置合わせすることを必要として、可撓性のトロカール軸4108に結合することが可能になる。さらに、この配置では高い引張り荷重に対応することができ、したがって切断されかつステープル留めされた組織の区画を、通常の外科装置で可能となるよりも高い把持力で把持することが可能になる。図12(a)から12(c)に示す実施形態は、アンビルア
センブリ4112に取り付けられたトロカール4220とトロカール軸4108に取り付けられたケーブル伸長要素4206とを有するが、他の実施形態においては、トロカール4220はトロカール軸4108に取り付けることができ、ケーブル伸長要素4206はアンビルアセンブリ4112に取り付けることができることは理解されるべきである。
【0094】
図13(a)から13(c)は、本発明の他の実施形態による取手部を示している。具体的には、図13(a)はハウジング5301を含む取手部5102の正面斜視図であり、図13(b)はその取手部5102の背面斜視図である。ハウジング5301の近位端5301aには、ギヤハウジング5302が配設される。ハウジング5301の遠位端5301bには、挿入チューブ5305が延在する。ギヤハウジング5302からは、クイックコネクト継手5304およびチューブ5308が延在している。
【0095】
クイックコネクト継手5304はギヤハウジング5302の上に装着されており、例えば一組のばねを介するなどして付勢することができる。ギヤハウジング5302は、第1の駆動ソケット5304aおよび第2の駆動ソケット5304bを含む。図13(c)は、取手部5102の分解正面斜視図である。図13(c)に示すように、ギヤハウジング5302は、残りのギヤ要素を相対的位置に保持するように、ギヤ保持プレート5401と結合する。第1の駆動ソケット5304aは第1の入力要素5306aを含み、その入力要素5306aの一方の端部5061はギヤハウジング5302の開口部5021を通って延在する。第1のスパーギヤ5310は、内部孔5101と円周方向に配設されたスパーギヤ歯5102とを有する。第1の入力要素5306aの第2の端部5062は、第1のスパーギヤ5310の内部孔5101を通じて、たとえば回転しないように延在する。第1のスパーギヤ5310の歯部5102は、雌ねじが設けられ、軸方向に延在する孔部5411を有するギヤナット5410と係合し、その孔部5411内には可撓性軸104の第1の駆動軸104aを螺合によって挿入することができる。ギヤナット5410はギヤベアリング5412の窪み5413内に着座する。ギヤベアリング5412はギヤハウジング5302の窪み5023内に着座する。ギヤベアリング5412の首部5415は内部孔5416を有し、ギヤハウジング5302の開口部5417を通じて近位側に延在する。
【0096】
第2の駆動ソケット5304bは第2の入力要素5306bを含み、その入力要素5306bの一方の端部5064はギヤハウジング5302の第2の開口部5022を通じて延在し、その入力要素5306bの他方の端部5065はスパーギヤ歯5066を含む。また、ギヤハウジング5302の内部窪み5024にはスパーギヤ5318が着座する。スパーギヤ5318は、第2の入力要素5306bのスパーギヤ歯5066に対応するスパーギヤ歯5181をその外周に沿って配置している。スパーギヤ5318はスパーギヤ5318を貫通して延在する孔部5182を有する。スパーギヤ5318の孔部5182内には、軸駆動要素5316の第1の端部5161が回転しないように係合する。軸駆動要素5316の第2の端部5162は、可撓性軸104の第2の駆動軸104bと回転しないように係合するよう構成されており、この第2の駆動軸104bは挿入チューブ5305を通じて軸駆動要素5316の第2の端部5162へ延在する。
【0097】
動作時には、取手部5102はクイックコネクト継手5304を介して可撓性軸20に取り付けられ、その結果、可撓性軸20の第1の回転可能な駆動軸30は取手部5102の第1の入力要素5306aに例えば回転しないように結合され、可撓性軸20の第2の回転可能な駆動軸32は、取手部5102の第2の入力要素5306bに例えば回転しないように結合される。把持モードにおいては、第1の回転可能な駆動軸30が例えば時計回りの第1の方向に回転すると、入力要素5306aは第1の方向に回転する。第1の入力要素5306aのギヤ歯5063がスパーギヤ5310のスパーギヤ歯5101と噛合い係合することによって、スパーギヤ5310は例えば反時計回りの第2の方向に回転す
る。スパーギヤ5310が第2の方向に回転すると、ギヤナット5410が第1の方向に回転する。可撓性軸104の第1の駆動軸104aがスパーギヤ5310の内部孔5101と螺合することによって、可撓性軸104の第1の駆動軸104aが、およびそれに伴って、第1の駆動軸104aが取り付けられたトロカール軸108が軸方向に移動する。このようにして、トロカール軸108は、ステープルおよび刃の部分106に対して例えば遠位方向の第1の方向に所望の距離だけ延在することができる。トロカール110がアンビル伸長ロッド206のトロカール受容スロット2065内に挿入されると、トロカール軸108は次いで、第1の回転可能な駆動軸30を反対方向に操作することによって収縮させることができる。
【0098】
操作の発射モードにおいては、第2の回転可能な駆動軸32は、入力要素5306bを第1の方向に回転させるために、例えば時計回りの第1の方向に回転することができる。入力要素5306bのギヤ歯5066がスパーギヤ5318のスパーギヤ歯5181と噛合い係合することによって、スパーギヤ5318は例えば反時計回りの第2の方向に回転する。スパーギヤ5318が第2の方向に回転すると、軸駆動要素5316と、この軸駆動要素5316に回転しないように結合された可撓性軸104の第2の駆動軸104bとが第2の方向に回転する。それによって可撓性軸104の第2の駆動軸104bが回転すると、第2の駆動軸104bが回転しないように連結されたステープルおよび刃の部分106の入力要素248もまた第2の方向に回転する。このようにして、ステープルおよび刃の部分106のステープルカートリッジ214は、その間に配置された組織の区画を把持するようにアンビルアセンブリ112に対して移動することができ、その組織を、前述により詳細に述べたように、切断しステープル留めすることができる。
【0099】
図14(a)から14(d)および図15(a)から15(d)は、本発明の他の実施形態による切断およびステープル留め用部品を示している。具体的には、図14(a)は、組み立てられかつ部分的に閉じられた位置にある切断およびステープル留め用部品603を示す正面斜視図であり、図14(b)はその背面斜視図である。図14(c)は、同じ位置および状態にある切断およびステープル留め用部品603を示す側面図であり、図14(d)はその背面図である。図示のように、切断およびステープル留め用部品603はアンビルアセンブリ612とステープルおよび刃の部分606とを含む。
【0100】
図15(a)は、アンビルアセンブリ612の構成要素を示す分解正面図である。アンビルアセンブリ612は、アンビルエンドキャップ602を含む。アンビルエンドキャップ602は、軸方向に配置され、中央に配設された開口部6021を有する。また、アンビルエンドキャップ602は、エンドキャップ602の遠位側部6025に半径方向に配設されたスロット6022と、アンビルエンドキャップ602の近位側部6026に把持面6023とを含む。把持面6023は刃収容部6024を形成する溝状部分を有しており、その目的については以下でさらに詳細に述べる。また、把持面6023はステープルガイド6027を形成する。
【0101】
また、アンビルアセンブリ612は、アンビルエンドキャップ602のスロット6022に断面的に対応するピン604を含む。また、アンビルアセンブリ612は中空アンビルスリーブ608を含む。アンビルスリープ608の遠位端6083は、アンビルエンドキャップ602の開口部6021に断面的に対応する。さらに、アンビルスリーブ608の遠位端6083は、アンビルピン604に断面的に対応する開口部6082を形成する。アンビルスリーブ608の近位端6084には、アンビルスリーブ608の周囲で円周方向に延在すると共に、アンビルスリーブ608の最も近位側の端部に配置された、半径方向に配設された複数の歯部6087の半径を含めて、アンビルスリーブ608のその他の部分の半径よりも小さい半径を有する凹部6086が形成されている。また、アンビルスリーブ608の近位端6084は凹部6086および歯6087を通じて延在する、た
とえば4つの、複数の軸方向スロット6088を形成し、それによってアンビルスリーブ608の近位端6084を半径方向に圧縮することが可能になる。また、アンビルスリーブ608は、1つまたは複数の軸方向に配設されたキー6085をその外部表面に含む。
【0102】
また、アンビルアセンブリ612はアンビル伸長ロッド606を含む。アンビル伸長ロッド606は、扁平にすることができるとともに、開口部6062を形成する遠位端6061を有する。また、アンビル伸長ロッド606は、円形であるとともにアンビルスリーブ608の凹部6086の内径に断面的に対応する中央領域6063を有する。アンビル伸長ロッド606の遠位端6061は、アンビルスリーブ608の凹部6086の内径よりも断面的に大きい。また、アンビル伸長ロッド606はトロカール受容スロット6065を形成する近位端6063を有する。
【0103】
図15(b)は、本発明の一実施形態によるステープルおよび刃の部分606の構成要素の一部を示す分解斜視図である。図15(b)に示すように、ステープルおよび刃の部分606は中空のアンビルスリーブガイド610を含む。アンビルスリーブガイド610の内部表面は1つまたは複数のキー溝6101を含む。アンビルスリーブガイド610の外部表面はリップ6102を含み、その結果、アンビルスリーブガイド610の近位端6103は、アンビルスリーブガイド610の遠位端6104よりも大きい半径を有する。
【0104】
また、ステープルおよび刃の部分606は外部ハウジングスリーブ612を含む。外部ハウジングスリーブ612は、その近位端6122に1つまたは複数の開口部6121を有し、外部ハウジングスリーブ612の遠位端6124に半径方向内方に延在するリップ6123を有する。また、ステープルおよび刃の部分606はステープルカートリッジ614を含む。ステープルカートリッジ614は軸方向に配設された複数のステープル受容スロット6141を形成し、ステープル6142がステープル受容スロット6141の中に格納される。図15(b)に示す実施形態において、ステープル受容スロット6141は、半径方向に離隔した2列の形態でステープルカートリッジ614の周りに円周方向に配設され、第1の列のステープル受容スロット6141は第2の列のステープル受容スロット6141の外側に位置する。また、ステープルカートリッジ614は、半径方向内方に延在するリップ6145と、ステープルカートリッジ614の近位端6144の近傍に配置された、半径方向外方に延在するリップ6143とを含む。さらに、ステープルカートリッジ614の遠位端6147は把持面6146を形成する。
【0105】
また、ステープルおよび刃の部分606は脆性の刃保護リング616およびカートリッジプッシャ要素617を含む。カートリッジプッシャ要素617は、半径方向外方に延在するリブ6171をその遠位端に有する。さらに、ステープルおよび刃の部分106は刃部618を含む。刃部618は、その遠位端に沿って円周方向に延在する切断へり6183を有する。さらに、刃部618は、半径方向内方に延在するタブまたはリップ6181をその近位端に形成する。
【0106】
また、ステープルおよび刃の部分606はステープルプッシャ620を含む。ステープルプッシャ620は軸方向に配設された複数の押歯6201を有し、その複数の押歯6201それぞれは、ステープラカートリッジ614のステープル受容スロット6141と対応しかつ位置合わせされている。また、ステープルプッシャ620はその外部表面上にキー6202を含む。
【0107】
また、ステープルおよび刃の部分606は、首部6221およびフランジ部6222を有するステープルプッシャキャリッジ要素622を含み、その首部6221はフランジ部6222に対して遠位方向へ軸方向に延在する。首部6221の内側表面はねじ山6223を含み、首部6221の外側表面は円周方向に配設された溝6224を形成する。さら
に、フランジ部6222の半径方向最外縁部にはキー6225を含む。
【0108】
図15(c)は、本発明の一実施形態による、分解した状態のステープルおよび刃の部分606の残りの構成要素を示す斜視図である。図15(c)に示すように、ステープルおよび刃の部分606はまたスプリットリング624を含む。スプリットリング624は、環状に配置すると一対のキー溝6243および6244をその間に形成する、一対の半円リング部6241および6242を含む。また、ステープルおよび刃の部分606は座金626を含む。また、ステープルおよび刃の部分606は、首部6281およびフランジ部6282を有するスラスト要素628を含み、その首部6281はフランジ部6282に対して遠位方向へ軸方向に延在する。首部6281の内側には孔部6283が形成される一方で、首部6281の外側表面は、ステープルプッシャキャリッジ要素622の首部6221の内側表面に配置されたねじ山6223に対応するねじ山6284を形成する。スラスト要素628のフランジ部6282は、その遠位側に向いた表面内の1つまたは複数の孔部6285と、例えば円形の断面を有する近位側に延在する3つのピン6286を含む。
【0109】
ステープルおよび刃の部分606は、第1のスパーギヤ630a、第2のスパーギヤ630bおよび第3のスパーギヤ630cを含む。第1、第2および第3のスパーギヤ630a、630b、630cは、スラスト要素628のピン6286に断面的に対応する内部孔6301を形成している。また、第1、第2および第3のスパーギヤ630a、630b、630cのそれぞれは、円周方向に配設されたスパーギヤ歯6302を含む。
【0110】
また、ステープルおよび刃の部分606は座金632および内部ハウジングスリーブ634を含む。内部ハウジングスリーブ634は、内部ハウジングスリーブ634の遠位端に第1の内径を有する内部孔6341を含む。内部孔6341は、半径方向内方に延在するリップ6345に向かって近位側に延在し、このリップ6345の位置で内部孔6341の内径が縮径する。内部孔6341は、半径方向内方に延在する第2のリップ6346に向かってさらに近位側に延在し、このリップ6346の位置で内部孔6341の内径が再び縮径される。第2のリップ6346に向かって近位側には、内部ハウジングスリーブ634の内側表面に沿って円周方向に延在するギヤ歯6347がある。たとえばギヤ歯6347に対して近位側の近位端6347は、滑らかな内側表面を有し、その中に画定された1つまたは複数の半径方向の開口部6344を有する。
【0111】
また、ステープルおよび刃の部分606は首部6361およびフランジ部6362を有するサンギヤ要素636を含み、その首部6361はフランジ部6362に対して遠位方向へ軸方向に延在する。首部6361の内側には孔部6363が形成される一方で、首部6361の外側表面は、第1のスパーギヤ630のギヤ歯6302に対応する、円周方向に配設されたギヤ歯6364を有する。フランジ部6362は、例えば円形の断面を有する近位方向に延在する3つのピン6366を含む。また、ステープルおよび刃の部分606は座金638を含む。
【0112】
また、ステープルおよび刃の部606は、第1のプラネタリギヤ640a、第2のプラネタリギヤ640bおよび第3のプラネタリギヤ640cを含む。第1、第2および第3のプラネタリギヤ640a、640b、640cのそれぞれは、スラスト要素636のピン6366に断面的に対応する内部孔6401を形成する。また、第1、第2および第3のプラネタリギヤ640a、640b、640cのそれぞれは、円周方向に配設されたギヤ歯6402を含む。
【0113】
また、ステープルおよび刃の部分606は、内部孔6421を有するサンギヤ642を含む。サンギヤ642の外側表面は、第1、第2および第3のプラネタリギヤ640a、
640bおよび640cのギヤ歯6402に対応する、円周方向に配設されたギヤ歯6422を有する。また、ステープルおよび刃の部分606は、内部孔6461を有する第2のプラネタリギヤ646を含む。第2のプラネタリギヤ646の外側表面は、サンギヤ642の円周方向に配設されたギヤ歯6422に対応する、円周方向に配設されたギヤ歯6462を有する。
【0114】
また、ステープルおよび刃の部分606は入力要素648を含み、その入力要素648の遠位端6481は内部孔6483を有し、ギヤ要素6481が回転しないように、たとえば方形の断面を介してこの内部孔6483に挿入される。ギヤ要素6481の外部表面には、第2のプラネタリギヤ646の外側表面上にある円周方向に配設されたギヤ歯6462に対応する、円周方向に配設されたギヤ歯6482がある。入力要素648の近位端は円形状の外周を有し、内部孔6485を有する。
【0115】
また、ステープルおよび刃の部606は、中心孔6501と、中心孔6501に対して半径方向に偏心した第2の孔部6502と、凹部6503とを有するハウジングリヤエンドキャップ650を含み、ピン6504が凹部6503から遠位方向に延在している。また、ハウジングリヤエンドキャップ650は外径方向のリップ6505を含む。外径方向のリップ6505に対して遠位側には、円形状の外周表面6507内に形成された少なくとも1つの開口部6506が設けられる。また、ハウジングリヤエンドキャップ650は、中心孔6501と連通する半径方向の孔6509をその近位端に含む。
【0116】
また、ステープルおよび刃の部分606は中心リヤエンドキャップスリーブ652を含み、この中心リヤエンドキャップスリーブ652は、中心リヤエンドキャップスリーブ652を貫通して延在する軸方向の孔部6521を有する。さらに、中心リヤエンドキャップスリーブ652は、中心リヤエンドキャップスリーブ652を通じて延在する半径方向の孔6252を有する。また、ステープルおよび刃の部分606は、ハウジングリヤエンドキャップ650の半径方向の開口部6509を通じて挿入されるように寸法および形状が定められたピン停止具655を含む。ピン停止具655はまた、挿入チューブ658の半径方向の開口部659を通じて挿入されるよう寸法および形状が定められている。ピン停止具655が、ハウジングリヤエンドキャップ650の半径方向の開口部6509と挿入チューブ658の半径方向の開口部659とを通じてこれらに同時に挿入されると、ハウジングリヤエンドキャップ650および挿入チューブ658は互いに所定の位置に固定される。挿入チューブ658は、図7(a)から7(f)に示す取手部102または図13(a)から13(c)に示す取手部5102などの取手部を、図9から11(b)に示すステープルおよび刃の部分106または図15(a)から15(c)に示すステープルおよび刃の部分606などのステープルおよび刃の部分に結合するために用いられる。挿入チューブ658は、組織適合可能で滅菌可能なエラストマー材料で形成すると有利である。好ましくは、挿入チューブ658はオートクレーブ滅菌可能な材料で形成することができる。さらに、挿入チューブ658は、高度なまたは比較的高度な潤滑性を有する材料で形成することができる。たとえば、挿入チューブ658は、テフロン(登録商標)(すなわち、ポリテトラフルオロエチレン(PTFE)などのフルオロポリマー)、シリコーン樹脂、たとえばSIL−KORE(登録商標)(W.L.Gore&Associates社製)、などのテフロン(登録商標)/シリコーンの組合せ、伸展テフロン(登録商標)などの「EPTFE」等の材料で形成することができる。利用することができるその他の適切な材料については、本出願人による同時係属中の、2002年3月15日に出願された特許文献15でさらに詳細に記載されており、この特許文献15は先に述べたようにその全体が参照により本明細書に明らかに組み込まれる。
【0117】
図15(d)は、組み立てられた状態にあるステープルおよび刃の部分606の構成要素の一部を示す側断面図である。図15(d)に示されていないステープルおよび刃の部
分606の構成要素は、通常図11(a)および11(b)に示すステープルおよび刃の部分の配置と類似した方式で配置される。図15(d)を参照すると、スラスト要素628(ここでは簡潔にするため部分的に図示する)が、アンビルスリーブガイド610(図示せず)に回転可能に装着されている。ステープルプッシャキャリッジ要素622は、ステープルプッシャキャリッジ要素622の首部6221の内側表面に配置されたねじ山6223が、スラスト要素628の首部6281の外側表面に配置されたねじ山6284と螺合するように、スラスト要素628に装着される。ステープルプッシャキャリッジ要素622は、外部ハウジングスリーブ612内で軸方向に摺動可能である。
【0118】
ステープルプッシャキャリッジ要素622のフランジ6222には、ステープルプッシャ620が当接している。ステープルプッシャ620は、外部ハウジングスリーブ612内で軸方向に摺動可能である。ステープルプッシャ620の押歯6201は、遠位側に延在し、ステープルカートリッジ614のステープル受容スロット6141と位置合わせされている。
【0119】
ステープルカートリッジ614はステープルプッシャ620に対して遠位側に配置され、外部ハウジングスリーブ612の内側に保持される。ステープルカートリッジ614は、ステープルカートリッジ614の半径方向外方に延在するリップ6143が、外部ハウジングスリーブ612の半径方向内方に延在するリップ6123に当接するまで、図14に示す位置から外部ハウジングスリーブ612内で遠位方向へ軸方向に移動可能である。
【0120】
ステープルプッシャ620とステープルプッシャキャリッジ要素622との間には、刃部618が配置される。刃部の遠位端に配置された、半径方向内方に延在するタブまたはリップ6185は、ステープルプッシャキャリッジ要素622の首部6221の外部表面に配置された凹部6224内に係合する。刃部618の切断へり6183は、脆性の刃保護リング616内に収容される。脆性の刃保護リング616の近位端は、ステープルカートリッジ614の半径方向内方に延在するリップ6144に当接する。
【0121】
ステープルカートリッジプッシャ617は、ステープルカートリッジプッシャ617の近位端がステープルプッシャ620に当接するように、刃部618に沿って配置される。ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、ステープルカートリッジ614の半径方向内方に延在するリップ6145に当接する。ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171が、最初は、ステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部表面との間の距離よりも大きくなるように、寸法および形状が定められている。
【0122】
動作時には、ステープルおよび刃の部分606の、図15(d)に示されていない構成要素は通常、上述により詳細に述べたように、ステープルおよび刃の部分106の、図11(a)および11(b)に示された構成要素の動作と類似した方式で動作する。図15(d)を参照すると、スラスト要素628は、たとえば使用者が可撓性軸20の第1の回転可能な駆動軸30を例えば第2の方向に操作することによって、アンビルスリーブガイド610の周りを回転する。
【0123】
スラスト要素628がアンビルスリーブガイド610の周りを第2の方向に回転すると、ステーププッシャキャリッジ要素622は、スラスト要素628の首部6281の外側表面に配置されたねじ山6284がステープルプッシャキャリッジ要素622の首部6221の内側表面に配置されたねじ山6223と螺合することによって、スラスト要素628に対して移動する。ステープルプッシャキャリッジ要素622のキー6225は、スプリットリング624によって形成されたキー溝6243内に係合するため、ステープルプ
ッシャキャリッジ要素622はスプリットリング624内で遠位方向へ軸方向に摺動する。ステープルプッシャキャリッジ要素622が遠位方向に移動すると、ステープルプッシャ620もまた、スラスト要素628のフランジ6282がステープルプッシャ620と当接することにより、遠位方向に移動する。
【0124】
ステープルプッシャ620が遠位方向に移動すると、刃部618と、刃部618の切断へり6183を覆う脆性の刃保護リング616とがまた、ステープルプッシャ620と共に遠位方向に移動する。さらに、ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、最初はステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部表面との距離よりも大きいため、ステープルプッシャ620が遠位方向に移動すると、ステープルカートリッジ614もまたステープルプッシャ620と共に遠位方向に移動する。したがって、動作のこの段階では、ステープルプッシャ620、刃部618、脆性の刃保護リング616、カートリッジプッシャ要素617およびステープルカートリッジ614は共に遠位側に移動する。ステープルカートリッジ614は、アンビルエンドキャップ602の把持面6023とステープルカートリッジ614の把持面6146との間で組織の区画(図示せず)を把持するように遠位側に移動する。組織の区画の厚さに応じて、ステープルカートリッジ614は、ステープルカートリッジ614の半径方向外方に延在するリップ6143が外部ハウジングスリーブ612の半径方向内方に延在するリップ6123に当接するまで、遠位側に移動することができる。
【0125】
ステープルカートリッジ614が遠位側に十分に移動して組織の区画を把持すると、脆性の刃保護リング616およびステープルカートリッジ614は、圧縮された組織の区画と接触することによって、遠位方向にさらに移動することを妨げられる。引き続き第2の回転可能な駆動軸32が動作した結果、たとえば約70ポンドまたはそれ以上の圧力が把持された組織の区画に作用する際、ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、ステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部表面との間で押され、それによってこれらの構成要素間の締りばめを解除する(overcoming)。この時点で、ステープルカートリッジ614は遠位側には移動しないが、その代わりにステープルプッシャ620および刃部618がステープルカートリッジ614に対して遠位側に引き続き移動する。このように刃部618が引き続き遠位側に移動すると、刃部618の切断へり6183は脆性の刃保護リング616を貫通し、それによって把持されている組織の区画を切断する。同時に、ステープルプッシャ620がさらに遠位側に移動すると、ステープルカートリッジ614のステープル受容スロット6141と位置合わせされたステープルプッシャ620の押歯6201は、ステープル受容スロット6141を通じて遠位側に移動し始める。このことによって、ステープルカートリッジ614のステープル受容スロット6141内に保持されたステープル6142は、ステープル6142が閉じられるまでの間、把持された組織の区画を通じ、アンビルエンドキャップ602の把持面6023のステープルガイド6026内に押し込まれる。
【0126】
ステープル6142が完全に閉じると、組織の区画に対する把持力を、第2の駆動軸32が反対の方向に回転することによって軽減することができる。一般に、第2の駆動軸32が反対方向に回転するとき、スラスト要素628もまた、ステープルおよび刃の部分106の構成要素が逆方向に移動することによって、上述の方向とは逆の方向に回転し、それによってステープルプッシャキャリッジ要素622は、例えば近位方向に移動して収縮する。また刃部618は、刃部618のリップ6185がステープルプッシャキャリッジ要素622の首部6221の外部表面に配置された凹部6224内に係合することによって、例えば近位側に移動し、収縮する。さらに、ステープルカートリッジ614は、ステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部
表面との間に保持されたステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171の締りばめによって収縮する。アンビルエンドキャップ602の把持面6023とステープルカートリッジ614の把持面6146との間の把持力が十分に減じられると、切断されステープル留めされた組織の区画が、アンビルエンドキャップ602の把持面6023とステープルカートリッジ614の把持面6146との間から除去され、外科用アタッチメント600を患者の体内から除去することができる。
【0127】
図16は、本発明の他の実施形態による外科用アタッチメント700の一部の構成要素を概略的に示す側断面図である。外科用アタッチメント700は、例えばケーブルのようなトロカール軸708に結合されたアンビルエンドキャップ702を含む。アンビルエンドキャップ702は把持面7023を含む。把持面7023は、刃収容部7024を形成する凹部を有する。また、把持面7023はステープルガイド7026を形成する。トロカール軸708はステープルおよび刃の部分706を介して延在し、トロカール軸708が、たとえば、図1に示しかつ図1に関連して説明した第1の回転可能な駆動軸30などの回転可能な駆動軸の動作により伸長および収縮されることによって、ステープルおよび刃の部分706に対して移動可能である。
【0128】
ステープルおよび刃の部分706は外部ハウジングスリーブ712を含み、外部ハウジングスリーブ712の近位端はハウジングリヤエンドキャップ750に強固に結合され、外部ハウジングスリーブ712の遠位端はステープルカートリッジ714に強固に結合されている。ステープルカートリッジ714は、ステープル7142が中に格納される複数のステープル受容スロット7141を形成する。ステープル受容スロット7141は、アンビルエンドキャップ702の把持面7023内に形成されたステープルガイド7026と対応しかつ位置合わせされるように構成されている。ステープルカートリッジ714の遠位端は、1つまたは複数の遠位突起7147を有する把持面7146を形成する。
【0129】
また、ステープルおよび刃の部分706は、ステープルカートリッジ714のステープル受容スロット7141と対応しかつ位置合わせされるように構成されたステープルプッシュフィンガ7201を有するステープルプッシャ720を含む。ステープルプッシャ720の遠位端には、刃部718が装着される。ステープルプッシャ720の近位端には、少なくとも最初はステープルプッシャ720をハウジングリヤエンドキャップ750に結合する剪断ピン751が設けられている。
【0130】
動作時には、切断し、ステープル留めすることが望まれる口部組織の区画などの組織の区画は、アンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7946との間に配置される。第1の回転可能な駆動軸30など適切な駆動機構が動作すると、トロカール軸708は、組織の区画がアンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7146との間で十分に把持されるまで、ステープルおよび刃の部分706に対して収縮される。組織の区画がアンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7146との間で十分に把持されると、第1の回転可能な駆動軸30など適切な駆動機構が引き続き動作し、剪断ピン751が剪断される。剪断ピン751が剪断される圧力を、組織の区画が切断およびステープル留めされる前に最適に把持される圧力に事前に決定されていると有利である。剪断ピン751が剪断すると、ステープルカートリッジ714は外部ハウジングスリーブ712およびハウジングリヤエンドキャップ750と共に、ステープルプッシャ720に対して近位側に移動することが可能になる。ステープルカートリッジ714がステープルプッシャ720に対して近位側に移動すると、ステープルプッシャ720のステープルプッシャフィンガ7201は、ステープルカートリッジ714の各ステープル受容スロット7141を通じて移動する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、ステープル7142は、ステープル
7142が閉じられるまでの間、組織の区画を通じてアンビルエンドキャップ702のステープルガイド7026に抗して、ステープルカートリッジ714のステープル受容スロット7141から徐々に押し出される。加えて、かつ通常は同時に、剪断ピン751が剪断すると、ステープルカートリッジ714は、ステープルプッシャ720の遠位端に装着された刃部718に対して近位側に移動する。ステープルカートリッジ714が刃部718に対して近位側に移動すると、刃部718はアンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7146との間で把持された組織の区画を貫通する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、刃部718は、組織の区画が完全に切断されるまでの間、組織の区画を通じてアンビルエンドキャップ702の刃収容部7024内に徐々に押し込まれる。
【0131】
このように、本発明の一実施形態による外科用アタッチメント700は、ステープルプッシャ720、ステープル7142および刃部718が相対的に静止した位置に保持される構成を実現する。アンビルアセンブリ712は、ステープルプッシャ720、ステープル7142および刃部718の間に配置された組織の区画を切断しステープル留めするよう、これらステープルプッシャ720、ステープル7142および刃部718に対して移動する。従来の円形状の切断およびステープル留め用の装置と比較して、この構成では、作用させることができる把持力が増大するため、性能を向上させることが可能になる。このように把持力の増大が可能となるのは、ギヤ装置などを用いてステープルプッシャ、ステープルおよび刃部を静止したアンビルに対して押圧する従来の円形状の切断およびステープル留めの装置とは異なり、外科用アタッチメント700が、相対的に静止した位置に保持されるステープルプッシャ、ステープルおよび刃部に向かって、かつこれらに抗してアンビルアセンブリが引っ張られる構成を実現しているからである。
【0132】
図17は、本発明の他の実施形態による外科用アタッチメント800の一部の構成要素を概略的に示す側断面図である。外科用アタッチメント800は、例えばケーブルのようなトロカール軸808に結合されたアンビルエンドキャップ802を含む。アンビルエンドキャップ802は把持面8023を含む。把持面8023は、トロカール軸808によって形成される軸880に対して例えば傾斜し、直交しない。把持面8023は、刃収容部8024を形成する凹部を有する。また、把持面8023はステープルガイド8026を形成する。トロカール軸808はステープルおよび刃の部分806を通じて延在し、トロカール軸806が、たとえば、図1に示しかつ図1に関連して説明した第1の回転可能な駆動軸30のような回転可能な駆動軸の動作により伸長および収縮されることによって、ステープルおよび刃の部分808に対して移動可能である。
【0133】
ステープルおよび刃の部分806はステープルカートリッジ814を含む。ステープルカートリッジ814は複数のステープル受容スロット8141を形成し、ステープル8142がその中に配置される。ステープル受容スロット8141は、アンビルエンドキャップ802の把持面8023内に形成されたステープルガイド8026と対応しかつ位置が合うように構成されている。ステープルカートリッジ814の遠位端は把持面8146を形成する。把持面8146は、トロカール軸808によって形成される軸880に対して例えば傾斜して直交はしない。把持面8146は、アンビルエンドキャップ802の把持面8023に平行となるように形状および方向が定められることが好ましい。
【0134】
また、ステープルおよび刃の部分806は、ステープルカートリッジ814のステープル受容スロット8141と対応しかつ位置が合うように構成されたステープルプッシャフィンガ8201を有するステープルプッシャ820を含む。ステープルプッシャ820の遠位端には、刃部818が装着される。
【0135】
動作時には、切断し、ステープル留めすることが望まれる口部組織の区画などの組織の
区画は、アンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間に配置される。例えば第1の回転可能な駆動軸30のような適切な駆動機構が動作すると、トロカール軸808は、組織の区画がアンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間で十分に把持されるまで、ステープルおよび刃の部分806に対して収縮する。例えば第1の回転可能な駆動軸30のような適切な駆動機構の動作によってトロカール軸808がステープルおよび刃の部分806に対して収縮する機械的装置は、上記に説明したようなギヤ装置またはその他の適切な機械的装置とすることができる。組織の区画がアンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間で十分に把持されると、例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作し、ステープルカートリッジ814およびステープルプッシャ820が相対的に移動する。この相対的移動は、ステープルプッシャ820が、その一部の例を先に述べた適切な駆動機構によってステープルカートリッジ814に対して押圧されることにより、またはアンビルエンドキャップ802が図16と関連して上述したようなステープルプッシャ820に対して引っ張られることによって容易とすることができる。その他の任意の機械的装置もまた、この目的で用いることができる。ステープルカートリッジ814がステープルプッシャ820に対して移動すると、ステープルプッシャ820のステープルプッシャフィンガ8201は、ステープルカートリッジ814の各ステープル受容スロット8141を通じて移動する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、ステープル8142は、ステープル8142が閉じられるまでの間、組織の区画を通じてアンビルエンドキャップ802のステープルガイド8026に抗しつつ、ステープルカートリッジ814のステープル受容スロット8141から徐々に押し出される。加えて、かつ通常は同時に、ステープルカートリッジ814がステープルプッシャ820の遠位端に装着された刃部818に対して移動すると、刃部818はアンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間で把持された組織の区画を貫通する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、刃部818は、組織の区画が完全に切断されるまでの間、組織の区画を通じてアンビルエンドキャップ802の刃収容部8024内に徐々に押し込まれる。
【0136】
本発明の一実施形態による外科用アタッチメント800は、ステープルおよび刃の部分806をより容易に患者の体内に挿入することができる配置を実現する。従来の円形状の切断およびステープル留めの装置では、ステープルおよび刃の部分は一般に、例えばステープルおよび刃の部分によって、またはステープルおよび刃の部分を通過するトロカール軸によって形成される全体的な軸に直交する把持面のような、垂直に配置された把持面を有する。この垂直に配置された把持面は、断面では基本的に直角である円周方向の縁部で、ステープルおよび刃の部分の外部ハウジングに接する。患者の体内、特に、非常に小さい断面積を有する患者の口部通路に挿入するとき、垂直に配置された把持面によって形成される円周方向の縁部とステープルおよび刃の部分の外部ハウジングは、口部通路の内部表面に擦れ、それによって挿入が困難になる。さらに、円周方向の縁部が口部通路の内部表面に擦れると、口部通路が損傷を受けることがある。それに対し、ステープルカートリッジ814の把持面8146が傾斜するなど垂直でない配置であれば、体験される口部通路の内部表面に対する擦れの程度が軽減され、それによって、ステープルおよび刃の部分806を口部通路を介して挿入することが容易になり、口部通路の内部表面に損傷を生じる可能性も低下する。
【0137】
図18(a)および18(b)は、本発明の他の実施形態によるステープルおよび刃の部分を示す。具体的には、図18(a)は、ステープルおよび刃の部分906の構成要素の一部を示す分解斜視図である。図18(a)に示すように、ステープルおよび刃の部分906は外部ハウジングスリーブ904を含む。外部ハウジングスリーブ904は、軸方
向の孔部9042および第2の孔部9044をその近位端に形成するギヤハウジング9043を有する。また、外部ハウジングスリーブ904は内部表面に沿って長手方向に延在するキー溝9041を有する。
【0138】
また、ステープルおよび刃の部分906は、例えば可撓性軸104の第2の回転可能な駆動軸104bのような駆動軸に回転しないように結合するように構成された入力軸902を含み、その入力軸902は、例えば取手部102のような取手部を介して、可撓性軸20の第2の回転可能な駆動軸32に結合することができる。入力軸902の遠位端は、入力ギヤ906内にたとえば伸長部の方形状断面を介して回転しないように挿入可能な伸長部を有する。入力ギヤ906の外部表面には、円周方向に配設されたギヤ歯9061が設けられている。
【0139】
また、ステープルおよび刃の部分906は中心孔9081を有するサンギヤ908を含む。サンギヤ908の外側表面は、入力ギヤ906のギヤ歯9061に対応する、円周方向に配設されたギヤ歯9082を有する。また、ステープルおよび刃の部分906は座金910を含む。また、ステープルおよび刃の部分906はリングギヤ912を含む。リングギヤ912は、リングギヤ912の内側表面に沿って円周方向に延在するギヤ歯9121を有する。
【0140】
また、ステープルおよび刃の部906は、第1のプラネタリギヤ914a、第2のプラネタリギヤ914bおよび第3のプラネタリギヤ914cを含む。第1、第2および第3のプラネタリギヤ914a、914b、914cのそれぞれは内部孔9141を形成する。さらに、第1、第2および第3のプラネタリギヤ914a、914b、914cのそれぞれは、円周方向に配設されたギヤ歯9142を含む。
【0141】
また、ステープルおよび刃の部906は、首部9162およびフランジ部9161を有するスパイダーねじ要素916を含み、その首部9162はフランジ部9162に対して遠位方向へ軸方向に延在する。中心孔9166はスパイダーねじ要素916を貫通して延在する。首部9162の外側表面はねじ山9164を形成する。さらに、首部9162の外側表面は長手方向に延在するキー溝9165を形成する。スパイダーねじ要素916のフランジ部9161は、第1、第2および第3のプラネタリギヤ914a、914b、914cの孔9141に対応する例えば円形状の断面を有する、近位側に延在する3つのピン9163を含む。
【0142】
また、ステープルおよび刃の部分906は略扁平で円板状の形状を有するナット918を含む。ナット918は、ナット918を貫通して延在する中心孔9181を有する。中心孔9181は、スパイダーねじ要素916の首部9162の外側表面上のねじ山9164に対応するねじ山9182を形成する。ナット918の遠位面は円周方向の凹部9183を形成する。さらに、ナット918の外径方向の縁部は、外部ハウジングスリーブ904の内部表面のキー溝9041に寸法および形状が対応するキー9184を形成する。
【0143】
また、ステープルおよび刃の部分906は、略扁平で円板状の形状を同様に有する回転式プッシャ920を含む。回転式プッシャ920は、回転式プッシャ920を貫通して延在する中心孔9201を有する。中心孔9201は、スパイダーねじ要素916の首部9162上で長手方向に延在するキー溝9165に寸法および形状が対応するキー9202を形成する。回転式プッシャ920の近位面は、ナット918の遠位面上の円周方向の凹部9183と位置が合う円周方向の凹部9204を形成する。回転式プッシャ920の遠位面には、プッシャカム9203が配設される。
【0144】
さらに、ステープルおよび刃の部分906は刃部922を含む。刃部922は、その遠
位端に沿って円周方向に延在する切断へり9221を有する。また、ステープルおよび刃の部分906はステープルカートリッジ924を含む。ステープルカートリッジ924は、軸方向に配設された複数のステープル受容スロット9241を形成し、ステープル9242がこのステープル受容スロット9241の中に格納される。図18(a)に示す実施形態において、ステープル受容スロット9241は、半径方向に離隔した2列の形態でステープルカートリッジ924の周りに円周方向に配設され、第1の列のステープル受容スロット9241は第2の列のステープル受容スロット9241の外側に位置する。さらに、ステープルカートリッジ924の遠位端は把持面9243を形成する。
【0145】
また、ステープルおよび刃の部分906はステープルプッシャ928を含む。ステープルプッシャ928は軸方向に配設された複数の押歯9281を有し、その複数の押歯9241それぞれは、ステープラカートリッジ924のステープル受容スロット9241と対応しかつ位置が合っている。また、ステープルプッシャ928はその外部表面上にキー9202を含む。
【0146】
図18(b)は、組み立てられた状態にあるステープルおよび刃の部分906の構成要素を示す側断面図である。入力軸902は、ギヤハウジング9043の第2の孔9044を通じて延在しており、その第2の孔9044内で回転するよう構成されている。入力ギヤ906は、入力軸902の遠位端に装着されかつ回転しないように結合される。サンギヤ908は、外側ハウジングスリーブ904の遠位側に延在する円筒形コア9045がサンギヤ908の中心孔9081を通じて挿入されるように、外側ハウジングスリーブ904の近位端内に着座する。入力ギヤ906の外部表面の円周方向に配設されたギヤ歯9061は、サンギヤ908の円周方向に配設されたギヤ歯9082と噛合い係合する。リングギヤ912は、外部ハウジングスリーブ904の近位端内に固定される。第1、第2および第3のプラネタリギヤ914a、914b、914cは、第1、第2および第3のプラネタリギヤ914a、914b、914cの円周方向に配設されたギヤ歯9142が、リングギヤ912の内側表面に沿って円周方向に延在するギヤ歯9121と、サンギヤ908のギヤ歯9082とに噛合い係合するように、サンギヤ908とリングギヤ912との間に半径方向に配置される。座金910は、第1、第2および第3のプラネタリギヤ914a、914b、914cの近位側と入力ギヤ906の遠位側とに、これらの構成要素が軸方向に移動するのを防止するよう当接する。
【0147】
スパイダーねじ要素916のフランジ部9161から延在するピン9163は、第1、第2および第3のプラネタリギヤ914a、914b、914cの内部孔9141に挿入され、それによって、第1、第2および第3のプラネタリギヤ914a、914b、914cの円周方向の間隔を維持する。したがって、スパイダーねじ要素916のフランジ部9161は、第1、第2および第3のプラネタリギヤ914a、914b、914cの遠位側に当接する。
【0148】
スパイダーねじ要素916の首部9162は、首部9162の外側表面上のねじ山9164がナット918の中心孔9181内のねじ山9182と螺合するように、ナット918の中心孔9181を通じて遠位側に延在する。ナット918のキー9184は、外部ハウジングスリーブ904の内部表面内のキー溝9041内に係合する。
【0149】
また、スパイダーねじ要素916の首部9162は、回転式プッシャ920の中心孔9201を通じて遠位側に延在する。回転式プッシャ920の中心孔9201内のキー9202は、スパイダーねじ要素916の首部9162内のキー溝9165内に係合する。さらに、一組のボールベアリング926がナット918および回転式プッシャ920の円周方向の溝9183および9204内にそれぞれ配置され、ナット918と回転式プッシャ920との間で概ね摩擦のない接触を実現する。
【0150】
また、スパイダーねじ要素916の首部9162は、ステープルプッシャ928および刃部922の中心を通じて遠位側に延在する。刃部922およびステープルプッシャ928の近位端は回転式プッシャ920の遠位面に当接する。ステープルプッシャ928のプッシャフィンガ9281は、遠位側に延在し、ステープルカートリッジ924のステープル受容スロット9241と位置合わせされる。ステープルカートリッジ924は、その把持面9243がステープルおよび刃の部分906の遠位面を形成する外部ハウジングスリーブ904の遠位端内に配置される。
【0151】
動作時には、切断し、ステープル留めすることが望まれる口部組織の区画などの組織の区画は、上記により詳細に述べたアンビルアセンブリのようなアンビルアセンブリの把持面と、ステープルカートリッジ924の把持面9243との間に配置される。例えば第1の回転可能な駆動軸30のような適切な駆動機構が動作すると、ステープルおよび刃の部分906を通じて延在する、例えばケーブルのようなトロカール軸は、組織の区画が各把持面の間で十分に把持されるまで、ステープルおよび刃の部分906に対して収縮される。例えば第1の回転可能な駆動軸30のような適切な駆動機構の動作によってトロカール軸をステープルおよび刃の部分906に対して収縮させる機械的装置は、上記に説明したようなギヤ装置またはその他の適切な機械的装置とすることができる。
【0152】
図18(b)を参照すると、入力軸902は、例えば、可撓性軸104の第2の回転可能な駆動軸104bのような駆動軸に結合することができる。駆動軸は、例えば取手部102のような取手部を介して、可撓性軸20の第2の回転可能な駆動軸32に結合することができる。駆動軸が例えば時計回りの第1の方向に回転すると、入力軸902がギヤハウジング9043の第2の孔9044内で第1の方向に回転する。入力軸902の遠位端が入力ギヤ906と回転しないように結合することによって、入力軸902が第1の方向に回転すると、入力ギヤ906もまた第1の方向に回転する。
【0153】
入力ギヤ906の円周方向に配設されたギヤ歯9061がサンギヤ908の円周方向に配設されたギヤ歯9082と噛合い係合することによって、入力ギヤ906が第1の方向に回転すると、サンギヤ908が、外部ハウジングスリーブ904内の遠位側に延在する円筒形コア9045を中心として、例えば反時計回りの第2の方向に回転する。さらに、第1、第2および第3のプラネタリギヤ914a、914bおよび914cの外部表面上の円周方向に配設されたギヤ歯9142がサンギヤ908の円周方向に配設されたギヤ歯9082と噛合い係合することによって、サンギヤ908が第2の方向に回転すると、第1、第2および第3のプラネタリギヤ914a、914bおよび914cが第1の方向に回転する。また、第1、第2および第3のプラネタリギヤ914a、914bおよび914cの外部表面上の円周方向に配設されたギヤ歯9142は、リングギヤ912の内側表面に沿って円周方向に延在するギヤ歯9121と噛合い係合し、リングギヤ912は外部ハウジングスリーブ904の近位端内に回転可能に固定されているため、第1、第2および第3のプラネタリギヤ914a、914bおよび914cが第1の方向に回転すると、その結果、サンギヤ908を中心として第2の方向に旋回することになる。
【0154】
スパイダーねじ要素916のフランジ部916から延在するピン9163は、第1、第2および第3のプラネタリギヤ914a、914b、914cの内部孔9141に挿入されるため、第1、第2および第3のプラネタリギヤ914a、914b、914cがサンギヤ908を中心として第2の方向に旋回動作すると、星型のねじ要素916もまた第2の方向に回転する。首部9162の外側表面上のねじ山9164がナット918の中心孔9181内のねじ山9182と螺合すること、およびナット918のキー9184が外部ハウジングスリーブ904の内側表面内のキー溝9041内に係合することによって、スパイダーねじ要素916が第2の方向に回転すると、ナット918はスパイダーねじ要素
916の首部9162に沿って遠位側に前進する。
【0155】
回転式プッシャ920の中心孔9201内のキー9202はスパイダーねじ要素916の首部9162内のキー溝9165内に係合するため、スパイダーねじ要素916が第2の方向に回転すると、回転式プッシャ920は第2の方向に回転する。回転式プッシャ920の近位側部はナット918の遠位側部に接触し、したがってナット918がスパイダーねじ要素916の首部9162に沿って前進すると、回転式プッシャ920もまたスパイダーねじ要素916の首部9162に沿って遠位側に前進する。ナット918の円周方向の凹部9183および9204内にそれぞれ配置された一組のボールベアリング926と、回転式プッシャ920とはそれぞれ、回転しないナット918と回転する回転式プッシャ920との間で概ね摩擦のない接触を実現する。
【0156】
回転式プッシャ920がスパイダーねじ要素916の首部9162に沿って遠位側に前進すると、刃部922はステープルカートリッジ924の中心孔9244を介して遠位側に移動して、先に述べたような、ステープルカートリッジ924の把持面9243とアンビルアセンブリ(図示せず)の把持面との間に配置された組織の区画を切断する。さらに、回転式プッシャ920がスパイダーねじ要素916の首部9162に沿って遠位側に前進すると、回転式プッシャ920のプッシャカム9203はステープルプッシャ要素928を遠位方向に押す。回転式プッシャ920は遠位側に前進すると同時に回転するため、プッシャカム9203はステープルプッシャ928のステープルプッシャフィンガ9281に対して順次接触しかつ押圧する。具体的には、回転式プッシャ920がスパイダーねじ要素916の首部9162を中心として漸次的に回転するとき、プッシャカム9203は、ステープルプッシャフィンガ9281の1番目、次いでステープルプッシャフィンガ9281の2番目など、ステープルプッシャフィンガ9281に対して接触しかつ押圧する。回転式プッシャ920がスパイダーねじ要素916の首部9162を中心として完全に回転した後には、プッシャカム9203は、ステープルプッシャ928のステープルプッシャフィンガ9281のすべてに対して、接触および押圧を完了する。回転式プッシャ920の遠位側部に対するプッシャカム9203の高さおよびステープル9242の突出部の長さによっては、プッシャカム9203がステープルプッシャ928に接触すると、プッシャカム9203がステープルカートリッジ924のスロット9241からステープルを完全に押し出すため、およびステープル9242がアンビルアセンブリのステープルガイド(図示せず)に対して完全に閉じられるためには、回転式プッシャ920を複数回、完全に回転させることが必要になる場合がある。
【0157】
前述のように、患者の体内に挿入される外科装置、特に従来の切断およびステープル留めの装置を使用する間に経験される問題の1つは、それらの装置が、患者の口部通路など、比較的小さい断面積を有する患者の開口部または通路に挿入することが必要であるということである。したがって、外科装置の挿入は困難もしくは不可能となることがあり、及び/又は口部通路の内部表面に損傷を与えることがある。本発明の一実施形態によれば、患者の小さな開口部または通路の中に、またはそれを介して外科装置を挿入するために、スリーブを用いることができる。たとえば、図19(a)から19(e)は、患者の小さな開口部または通路の中に、およびそれを介して外科装置を挿入することを容易にするスリーブを示している。
【0158】
図19(a)は、本発明の一実施形態による、患者の体内に挿入する間に円形の切断およびステープル留めの装置などの外科装置を被覆するよう構成されたスリーブ8000の分解斜視図である。スリーブ8000は一般に、スリーブ8000によって被覆される外科装置の寸法と形状及び/又は外形に類似した寸法と形状及び/又は外形を有すると有利である。例示のみを目的として、以下で説明するスリーブは、外科用アタッチメント100と共に使用するために述べられているが、それらのスリーブはいかなる種類の外科装置
を被覆するためにも利用することができることは理解されるべきである。さらに、例示のみを目的として、以下で説明するスリーブは、患者の口部通路内に挿入する外科装置を被覆するために用いられるものとして述べられているが、それらのスリーブは、あらゆる種類の患者の開口部または通路への外科装置の挿入に対応することができることは理解されるべきである。
【0159】
スリーブ8000は、組織適合可能な滅菌可能なエラストマー材料で形成することができる。好ましくは、スリーブ8000はオートクレーブ滅菌可能な材料で形成することができる。さらに、スリーブ8000は、高度な、または比較的高度な潤滑性を有する材料で形成することができる。たとえば、スリーブ8000は、テフロン(登録商標)(すなわち、ポリテトラフルオロエチレン(PTFE)などのフルオロポリマー)、シリコーン樹脂、たとえばSIL−KORE(登録商標)(W.L.Gore&Associates社製)、などのテフロン(登録商標)/シリコーンの組合せ、伸展テフロン(登録商標)などの「EPTFE」等の材料で形成することができる。利用することができるその他の適切な材料については、本出願人による同時係属中の、2002年3月15日に出願された特許文献15でさらに詳細に記載されており、この特許文献15は先に述べたようにその全体が参照により本明細書に明らかに組み込まれる。
【0160】
スリーブ8000は、挿入位置と収縮位置との間で選択的に調整されるよう構成された、閉包要素8020および8022などの1つまたは複数の閉包要素を含む。また、スリーブ8000は遠位部分8024を含む。遠位部分8024は、ステープルおよび刃の部分106などの外科装置の遠位部分または外科装置のその他の遠位部分を被覆するよう構成することができる。スリーブ8000はまた、近位部分8026を含むことができる。近位部分8026は、外科装置の近位部分を被覆するよう構成することができる。たとえば、スリーブ8000の近位部分8026は、図1に示しかつ図1に関連して説明した可撓性軸20もしくは可撓性軸104などの可撓性軸、または図7(a)に示しかつ図7(a)に関連して説明した取手部102もしくは図13(a)に示しかつ図13(a)に関連して説明した取手部5102などの取手部を被覆するよう構成することができる。環状導入要素8010は、スリーブ8000の近位部分8026に結合することができ、スリーブ8000内に外科装置を挿入することを容易にするよう機能することができる。
【0161】
図19(b)は、本発明の一実施形態によるスリーブ8000の一部分の側断面図である。この実施形態において、閉包要素8020および8022は「カモノハシ」に類似した形状を形成するよう先細となっている。スリーブ8000の閉包要素は、外科用アタッチメント100を口部通路に挿入することを容易にする任意の適切な形状を有することができることは理解されるべきである。図19(b)は、スリーブ8000が口部通路内への挿入に適する閉位置にある閉包要素8020および8022を示す。閉包要素8020および8022が、図示のように閉位置にあるとき、閉包要素8020および8022が先細の配置となるため、スリーブ8000と、それによって被覆される外科用アタッチメント100とを口部通路に挿入することがより容易となり、それによって、口部通路の内部表面に損傷をもたらす可能性が低下する。一実施形態において、閉包要素8020および8022は、図1に示しかつ図1に関連して説明したトロカール110などのトロカールに取り付けられるなど、外科用アタッチメント100の一部分に取り付けられることによって閉位置に保持される。
【0162】
図19(c)は、開位置にある閉包要素8020および8022を示している。具体的には、スリーブ8000が口部通路に挿入された後、閉包要素8020および8022は、スリーブ8000内の外科用アタッチメント100が所望の外科手術を実施することができるように開くことができる。たとえば、閉包要素8020および8022は、アンビルアセンブリ112をステープルおよび刃の部分106に結合し、次いでステープルおよ
び刃の部分106に向かって、かつ抗して収縮させるよう開くことができる。
【0163】
閉包要素8020および8022を開くために、遠位部分8024及び/又は閉包要素8020および8022は収縮機構を有することができる。たとえば、図19(a)は、スリーブ8000の遠位部分8024の一部分、またはスリーブ8000の遠位部分8024から延在するフラップ8028を示している。これらのフラップ8028は、閉包要素8020および8022に貼り付ける、または閉包要素8020および8022の円周方向に配設されたスロット8030を通じて挿入することによって、閉包要素8020および8022に結合することができる。したがって、スリーブ8000は口部通路に挿入された後に、外科用アタッチメント100に対して近位方向に移動することができる。スリーブ8000が外科用アタッチメント100に対して近位方向に移動すると、閉包要素8020および8022は枢転されるかまたは開かれる。
【0164】
スリーブ8000および外科用アタッチメント100の寸法および形状によっては、閉包要素8020および8022が開いても、スリーブ8000は所定位置に残存することができる。この場合、スリーブ8000は、外科用アタッチメント100を口部通路から除去するのを容易にするために、例えば外科手技の完了後のように、事後に用いることができる。あるいは、閉包要素8020および8022が開くと、外科用アタッチメント100は口部通路に残存する一方で、スリーブ8000は近位方向に外科用アタッチメント100に対して引き続き移動することによって、口部通路から除去することができる。この場合、閉包要素8020および8022を含めてスリーブ8000は、外科用アタッチメント100に対して摺動する。フラップ8028は図19(a)では長手方向に直線的であるものとして示されているが、他の実施形態においては、フック、輪など、異なる形状を有することができる。
【0165】
図19(d)および19(e)は、本発明の他の実施形態によるスリーブ8100を示している。具体的には、図19(d)は挿入位置にあるスリーブ8100を示している。挿入位置において、スリーブ8100は、外科用アタッチメント100を被覆すると共に、外科用アタッチメント100を口部通路に挿入することを容易にするよう構成されている。
【0166】
スリーブ8100は、遠位部分8105を含むことができる。遠位部分8105は、ステープルおよび刃の部分106など、外科用アタッチメント100の遠位部分を被覆するよう構成することができる。また、スリーブ8100は近位部分8107を含むことができる。近位部分8107は、外科用アタッチメント100の近位部分または外科用アタッチメント100に結合されたその他の構成要素を被覆するよう構成することができる。たとえば、スリーブ8100の近位部分8107は、図1に示しかつ図1に関連して説明した可撓性軸20もしくは可撓性軸104などの可撓性軸、または図7(a)に示しかつ図7(a)に関連して説明した取手部102もしくは図13(a)に示しかつ図13(a)に関連して説明した取手部5102などの取手部を被覆するよう構成することができる。
【0167】
また、スリーブ8100は閉包要素を含むことができる。閉包要素はまた、リング8102として構成することができるが、その他の形状を用いることもできる。スリーブ8100が挿入位置にあるとき、リング8102は、リング8102によって形成される軸8104がステープルおよび刃の部分106によって形成される長手方向の軸8106に実質的に直交するように配置することができる。リング8102は、ステープルおよび刃の部分106を通じて延在するトロカール110に取り付けられるなど、外科用アタッチメント100の一部分に取り付けられることによって、この位置に保持することができる。この位置で、リング8102の一方の側部8110はステープルおよび刃の部分106の遠位側部と接触し、リング8102の反対側の側部8112はステープルおよび刃の部分
106の反対側に配置される。リング8102の円形の外周は全体的に湾曲した表面を有し、この表面は口部通路に挿入する際、外科用アタッチメント100がそれを通過する前に口部通路を漸次的に開く。このようにして、外科用アタッチメント100を口部通路に挿入することが容易にすることができる。
【0168】
図19(e)は収縮位置にあるリング8102を示している。具体的には、中に外科用アタッチメント100を有するスリーブ8100が口部通路に挿入された後、リング8102は、外科用アタッチメント100が所望の外科手術を実施することができるよう、外科用アタッチメント100に対して移動することができる。たとえば、リング8102は、アンビルアセンブリ112をステープルおよび刃の部分106に結合し、次いでステープルおよび刃の部分106に向かって収縮させるよう、軸8109に対して回転することができる。リング8102を収縮させるために、スリーブ8100は近位方向に外科用アタッチメント100に対して移動することができる。スリーブ8100が近位方向に外科用アタッチメント100に対して移動すると、リング8102は、外科用アタッチメント100のたとえばトロカール100から取り外され、ステープルおよび刃の部分106に向かって、かつ抗して引き寄せられる。スリーブ8100が近位方向に外科用アタッチメント100に対して引き続き移動すると、リング8102は回転し、結果的に、リング8102によって形成される軸8104がステープルおよび刃の部分106によって形成される軸8106と同軸となるように配置される。この位置で、リング8102は、その外径がステープルおよび刃の部分106の外径よりも小さい場合、図19(e)に示すリング8102の円周全体でステープルおよび刃の部分106と接触することができる。したがって、スリーブ8100は、外科手術の間に引き続きステープルおよび刃の部分106を被覆することができ、外科用アタッチメント100を口部通路から除去することを容易にするため、外科手技の完了後など、事後に用いることができる。あるいは、リング8102の外径がステープルおよび刃の部分106の外径よりも大きい場合、スリーブ8100が外科用アタッチメントに対して引き続き移動すると、リング8102は、スリーブ8100を口部通路から除去するために外科用アタッチメント100に対して摺動する。
【0169】
このようにして、上述した本発明の複数の目的および利点が最も効果的に達成される。当業者には、上述の例示的実施形態の多数の変型が本発明の精神および技術的範囲から逸脱することなく実施することができることは理解されよう。本明細書においては本発明の単一の例示的実施形態について説明し開示したが、本発明がそれによって限定されることはなく、本発明の範囲は添付の特許請求の範囲によって定められることは理解されるべきである。
【技術分野】
【0001】
(発明の詳細な説明)
(関連出願への相互参照)
本発明は、1999年1月2日に出願した特許文献1、および特許文献2、2000年11月28日に出願した特許文献3、1999年6月2日に出願した特許文献4、および特許文献5、1999年7月12日に出願した特許文献6、および特許文献7、2000年2月22日に出願した特許文献8、および特許文献9、2000年2月22日に出願した特許文献10、2000年2月22日に出願した特許文献11、および特許文献12、2001年4月17日に出願した特許文献13、2001年7月22日に出願した特許文献14に関し、これらのそれぞれの全文が引用により本明細書に明示的に組み込まれている。本発明は、電気機械式外科システムに関し、より具体的には、患者の体内の組織を把持し、切断し、およびステープル留めするための電気機械式外科システムの外科用アタッチメントに関する。
【背景技術】
【0002】
外科器具を身体の開口部に導入することを必要とする外科手技は数多くある。その一例は、患者の口腔を介して円形の把持、切断、およびステープル留めの器具を挿入するような導入によって、癌性または異常な組織を口部の通路から切除することである。
【発明の概要】
【発明が解決しようとする課題】
【0003】
この種の外科手技の間に経験される問題の1つは、開口部内に外科器具が導入されているとき、または導入されたときに身体の開口部が損傷を受ける可能性があるということである。これは、外科装置を導入する開口部が、口腔の組織など、接触すると容易に損傷を受ける脆弱な組織を含む場合には特に問題となる。この種の外科手技の間に経験されるもう1つの問題は、開口部内に外科器具が導入されているとき、または導入されたときにその外科器具が損傷を受ける可能性があるということである。患者は外科装置が不適切に機能した場合に危害を受けることもあるため、外科装置に対する損傷を回避することは特に重要となろう。
【0004】
外科器具の小型化においては著しい発展がなされてきたが、従来の外科器具は一般に、口部の通路など、患者の比較的小さな開口部または通路内では用いることができない。したがって、従来の外科装置および手技では依然として、外科装置と開口部/通路との一方または双方に損傷を与える危険性がある。
【0005】
それゆえに、外科装置が開口部に導入されたときに外科装置と口部の通路など患者の開口部または通路との一方または双方へ損傷を与える可能性を最小限にする装置に対する必要がある。
【課題を解決するための手段】
【0006】
本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置は、少なくとも2つの駆動体を含むハウジングを含む。この外科装置はまた、ハウジングに機械的に取り付け可能で、かつ開位置と閉位置との間でハウジングに対して移動可能なアンビルを含む。第1の駆動体は、ハウジングに対してアンビルを開位置と閉位置との間の中間位置へ移動させるよう動作する。第2の駆動体は、アンビルに対して少なくともハウジングの一部分を中間位置と閉位置との間で移動させるよう動作する。
【0007】
好都合なことに、アンビルおよびハウジングは、第1および第2の把持面をそれぞれ形成する。この外科装置は、アンビルが閉位置にあるとき、アンビルの第1の把持面とハウジングの第2の把持面との間にある組織の区画を把持するよう構成されている。ハウジングは、第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含むことができる。ハウジングはまた、第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成されたステープル留め要素を含むことができる。ステープル留め要素は、第2の駆動体によってハウジング内で収縮位置と伸長位置との間で軸方向に移動するよう構成されたステープルカートリッジと、ステープルカートリッジの各ステープルスロット内に格納されたステープルをステープルスロットからアンビル内のステープルガイド内へ押し込むよう構成されたステープルプッシャとを含む。
【0008】
本発明はまた、その様々な実施形態に従って、組織の区画をステープル留めするための外科装置に関する。この外科装置は、ステープルプッシャとステープルを格納するよう構成されたハウジングとを含む。ハウジングはステープルプッシャに対して選択的に移動可能である。また、この外科装置はステープルプッシャおよびハウジングに対して移動可能なアンビルを含む。アンビルが移動すると、ハウジングはステープルプッシャに対して移動する。アンビルは、アンビルがハウジングの把持面から離隔される第1の位置と、アンビルがハウジングの把持面と接触する第2の位置との間で、ステープルプッシャに対して移動可能とすることができる。さらに、アンビルは、第2の位置と、ハウジングに格納されたステープルがステープルプッシャによってハウジングから押し出されてアンビルに対して閉じられる第3の位置との間で、ステープルプッシャに対して移動可能とすることもできる。一実施形態において、ハウジングは剪断ピンによってステープルプッシャに結合されており、ここでその剪断ピンは、アンビルが第2の位置と第3の位置との間で移動することによって所定量の圧力をハウジングの把持面に作用させたときに、剪断するよう構成されている。
【0009】
また、本発明は、その様々な実施形態に従って、組織の区画を切断するための外科装置に関する。この外科装置は切断要素と把持面を有するハウジングとを含む。ハウジングは切断要素に対して選択的に移動可能である。この外科装置はまた、切断要素およびハウジングに対して移動可能なアンビルを含む。アンビルが移動するとハウジングは切断要素に対して移動する。アンビルは、アンビルがハウジングの把持面から離隔される第1の位置とアンビルがハウジングの把持面と接触する第2の位置との間で、切断要素に対して移動可能とすることもできる。さらに、アンビルは、第2の位置と切断要素がアンビルに接触させられる第3の位置との間で、切断要素に対して移動可能とすることもできる。一実施形態において、ハウジングは剪断ピンによって切断要素に結合され、この剪断ピンは、アンビルが第2の位置と第3の位置との間で移動することによって所定量の圧力をハウジングの把持面に作用させたときに、剪断するよう構成されている。
【0010】
また、本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置は第1の把持面を形成するハウジングを含む。この外科装置はまた、機械的に取り付け可能で、かつ伸長位置と収縮位置との間で軸に沿ってハウジングに対して移動可能なアンビルを含む。アンビルは第2の把持面を形成する。第1および第2の把持面の少なくとも一部分は軸に対して直交しない。この外科装置は、アンビルが閉位置にあるとき、第1および第2の把持面の間の組織の区画を把持するよう構成されることが好ましい。さらに、第1および第2の把持面は互いに平行とすることができる。第1の駆動体を利用して、アンビルをハウジングに対して移動させることができる。また第2の駆動体を利用することもでき、ここでハウジングは第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含む。さらに、ハウジングは、第2の駆動体によって収縮位置と伸長位置との間で駆
動されるよう構成されたステープル留め要素を含むことができる。
【0011】
また、本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置はまた、ステープル留め要素を含むハウジングを含む。ステープル留め要素は、複数のスロットとスロット内に格納されたステープルとを形成するステープルカートリッジを含む。ステープル留め要素はまた、複数のスロットと位置合わせされるステープルプッシャフィンガを有するステープルプッシャを含む。この外科装置はまた、収縮位置と中間位置の間でステープルカートリッジとステープルプッシャとを共に移動させるよう構成された駆動体を含む。中間位置において、駆動体はステープルカートリッジに対してステープルプッシャを伸長位置へ移動させる。この外科装置はまた、駆動体が収縮位置と中間位置との間でステープルカートリッジとステープルプッシャとを共に移動させるときに、ステープルカートリッジとステープルプッシャとの相対的位置を維持するよう構成された干渉要素を含むことができる。中間位置は、ステープルカートリッジが組織の区画を十分に把持する位置、またはステープルカートリッジがハウジングに対して所定位置に軸方向に係止される位置とすることができる。干渉要素は脆性の構成要素であってもよい。代替的に、干渉要素はステープルプッシャに結合することができ、所定の圧力までステープルカートリッジの一部分との接触を維持する、軸方向に延在するリブを含むことができる。また、この外科装置は刃部などの切断要素を含むこともでき、ここで干渉要素の軸方向に延在するリブは、ステープルカートリッジの反対側に配設された軸方向に延在するリブと刃部とに接触する。
【0012】
また、本発明は、その様々な実施形態に従って、組織の区画の切断およびステープル留めの少なくとも1つを行うための外科装置に関する。この外科装置はハウジングを含むことができる。この外科装置はまた、ハウジングの遠位端に配置され、スロット内に格納された複数のスロットおよびステープルを形成するステープルカートリッジを含むこともできる。この外科装置はまた、ステープルカートリッジに対して近位側に配置され、複数のスロットと位置合わせされる複数のステープルプッシャフィンガを有するステープルプッシャを含むこともできる。この外科装置はまた、ステープルプッシャに対して近位側に配置され、ハウジング内で同時に回転させられかつステープルカートリッジに対して遠位側に前進させられるよう構成されたプッシャ要素を含むことができる。プッシャ要素はステープルプッシャに向かって延在するカム要素を有し、その結果、カム要素は複数のステープルプッシャフィンガに対して順次押圧する。プッシャ要素は、スパイダーねじ要素(spiderscrewelement)の首部分など、ステープルカートリッジに向か
って長手方向に延在する回転可能な部材にキー結合することができる。この外科装置はまた、プッシャ要素に対して近位側に配置されたナットを含むことができ、そのナットは雌ねじ孔を有し、そのナットの雌ねじ孔は回転可能な部材と螺合する。
【0013】
また、本発明は、その様々な実施形態に従って、開口部と患者の通路とのいずれかに外科装置を挿入することを容易にするためのスリーブに関し、この外科装置は断面を形成する遠位端を有する。この外科装置は、その外科装置の少なくとも一部分を覆うように構成された第1の部分を含むことができる。また、この外科装置は、閉包要素が外科装置の遠位端の断面よりも小さい断面へ勾配する挿入位置と、外科装置が閉包要素を介して開口部と患者の通路とのいずれかで外科手術を実施するよう構成される収縮位置との間で、選択的に移動可能な少なくとも1つの閉包要素を含むこともできる。
例えば、本願発明は以下を提供する:
1.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
少なくとも2つの駆動体を含むハウジングと、
上記ハウジングに機械的に取り付け可能で、かつ伸長位置と収縮位置との間で上記ハウジングに対して移動可能なアンビルとを備え、
上記駆動体のうちの第1の駆動体は、上記伸長位置と上記収縮位置との間の中間位置へ上記アンビルを上記ハウジングに対して移動させるよう構成され、上記駆動体のうちの第2の駆動体は、上記中間位置と上記収縮位置との間で上記アンビルに対して上記ハウジングの少なくとも一部分を移動させるように構成されている外科装置。
2.上記アンビルおよび上記ハウジングは第1および第2の把持面をそれぞれ形成し、上記外科装置が、上記アンビルが上記収縮位置にあるとき、上記アンビルの上記第1の把持面と上記ハウジングの上記第2の把持面との間で組織の区画を把持するよう構成されていることを特徴とする、1に記載の外科装置。
3.上記ハウジングは、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含むことを特徴とする、1に記載の外科装置。
4.上記ハウジングは、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成されたステープル留め要素を含むことを特徴とする、1に記載の外科装置。
5.上記ステープル留め要素は、上記第2の駆動体によって上記ハウジング内で収縮位置と伸長位置との間で軸方向に移動するよう構成されたステープルカートリッジを含むことを特徴とする、1に記載の外科装置。
6.上記ステープルカートリッジは、上記第2の把持面を含むことを特徴とする4に記載の外科装置。
7.上記ステープル要素は、上記ステープルカートリッジの各ステープルスロット内に格納されたステープルを上記ステープルスロットから押し出し、上記アンビル内へ押し込むよう構成されたステープルプッシャを含むことを特徴とする、6に記載の外科装置。
8.上記アンビルおよび上記ハウジングは、上記アンビルが上記ハウジングに対して上記中間位置で軸方向に係止可能となるよう構成されていることを特徴とする、1に記載の外科装置。
9.上記第1および第2の駆動体は、各回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸が少なくとも1つのモータによって選択的に回転されることを特徴とする、1に記載の外科装置。
10.上記回転可能な駆動軸は、制御装置の制御下で選択的に回転されることを特徴とする、9に記載の外科装置。
11.組織の区画をステープル留めする外科装置であって、
ステープルプッシャと、
ステープルを格納するよう構成されたハウジングであって、上記ステープルプッシャに対して選択的に移動可能なハウジングと、
上記ステープルプッシャおよび上記ハウジングに対して移動可能なアンビルであって、上記アンビルが移動すると上記ハウジングが上記ステープルプッシャに対して移動する、アンビルと、
を含む外科装置。
12.上記アンビルは、上記アンビルが上記ハウジングの把持面から離隔される第1の位置と、上記アンビルが上記ハウジングの上記把持面と接触する第2の位置との間で、上記ステープルプッシャに対して移動可能であることを特徴とする、11に記載の外科装置。13.上記アンビルは、上記第2の位置と、上記ハウジングに格納された上記ステープルが上記ステープルプッシャによって上記ハウジングから押し出されて上記アンビルに対して閉じられる第3の位置との間で、上記ステープルプッシャに対して移動可能であることを特徴とする、12に記載の外科装置。
14.上記アンビルが上記第2の位置と上記第3の位置との間で移動すると、上記ハウジングが上記ステープルプッシャに対して移動することを特徴とする、13に記載の外科装置。
15.上記ハウジングは、剪断ピンによって上記ステープルプッシャに結合されることを特徴とする、14に記載の外科装置。
16.上記剪断ピンは、上記アンビルが上記第2の位置と上記第3の位置との間で移動することによって所定量の圧力を上記ハウジングの上記把持面に作用させたときに剪断する
ように構成されていることを特徴とする、15に記載の外科装置。
17.上記ハウジングは、、上記ステープルプッシャから延在する、対応する複数のプッシャフィンガと位置合わせされた複数のステープルスロットを含むことを特徴とする、16に記載の外科装置。
18.上記アンビルを上記ハウジングおよび上記ステープルプッシャに対して移動させるように構成された第1の駆動体をさらに備えることを特徴とする、17に記載の外科装置。
19.上記ステープルプッシャに装着された切断要素をさらに備えることを特徴とする、18に記載の外科装置。
20.上記切断要素は、上記アンビルが上記第2の位置と上記第3の位置との間で上記ステープルプッシャに対して移動するとき、上記アンビルと上記ハウジングの上記把持面との間に配置された組織を切断するよう動作することを特徴とする、19に記載の外科装置。
21.組織の区画を切断するための外科装置であって、
切断要素と、
把持面を有するハウジングであって、上記切断要素に対して選択的に移動可能なハウジングと、
上記切断要素および上記ハウジングに対して移動可能なアンビルであって、上記アンビルが移動すると上記ハウジングが上記切断要素に対して移動する、アンビルと、
を含む外科装置。
22.上記アンビルは、上記アンビルが上記ハウジングの把持面から離隔される第1の位置と、上記アンビルが上記ハウジングの上記把持面と接触する第2の位置との間で、上記切断要素に対して移動可能であることを特徴とする、21に記載の外科装置。
23.上記アンビルは、上記第2の位置と上記切断要素が上記アンビルに接触させられる第3の位置との間で、上記切断要素に対して移動可能であることを特徴とする、22に記載の外科装置。
24.上記アンビルが上記第2の位置と上記第3の位置との間で移動すると、上記ハウジングが上記切断要素に対して移動することを特徴とする、23に記載の外科装置。
25.上記ハウジングは、剪断ピンによって上記切断要素に結合されることを特徴とする、24に記載の外科装置。
26.上記剪断ピンは、上記アンビルが上記第2の位置と上記第3の位置との間で移動することによって所定量の圧力を上記ハウジングの上記把持面に作用させたときに剪断するよう構成されていることを特徴とする、25に記載の外科装置。
27.上記アンビルを上記ハウジングおよび上記切断要素に対して移動させるよう構成された第1の駆動体をさらに備えていることを特徴とする、26に記載の外科装置。
28.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
第1の把持面を形成するハウジングと、
機械的に取り付け可能で、かつ伸長位置と収縮位置との間で軸に沿って上記ハウジングに対して移動可能なアンビルであって、第2の把持面を形成するアンビルと、
を備え、
上記第1および第2の把持面の少なくとも一部分が上記軸に対して直交しない外科装置。29.上記外科装置は、上記アンビルが上記閉位置にあるとき、上記第1および第2の把持面間の組織の区画を把持するよう構成されていることを特徴とする、28に記載の外科装置。
30.上記第1および第2の把持面は、互いに平行であることを特徴とする、29に記載の外科装置。
31.上記アンビルを上記ハウジングに対して移動させるよう構成された第1の駆動体をさらに備えていることを特徴とする、30に記載の外科装置。
32.第2の駆動体をさらに備え、
上記ハウジングが、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成された切断要素を含むことを特徴とする、31に記載の外科装置。
33.第2の駆動体をさらに備え、
上記ハウジングが、上記第2の駆動体によって収縮位置と伸長位置との間で駆動されるよう構成されたステープル留め要素を含むことを特徴とする、31に記載の外科装置。
34.上記ステープル留め要素は、ステープルカートリッジを含むことを特徴とする、1に記載の外科装置。
35.上記ステープルカートリッジは、上記第2の把持面を形成していることを特徴とする、34に記載の外科装置。
36.上記ステープル要素は、上記ステープルカートリッジの各スロット内に格納されたステープルを上記スロットから押し出し、上記アンビル内へ押し込むよう構成されたステープルプッシャを含むことを特徴とする、35に記載の外科装置。
37.上記ステープルプッシャは、各列が異なる軸方向位置に配置された、ステープルプッシャフィンガの半径方向に離隔された少なくとも2つの列を含むことを特徴とする、36に記載の外科装置。
38.上記ステープルカートリッジの上記スロットは上記第1の把持面内に開口部を形成し、上記開口部は、ステープルプッシャフィンガの半径方向に離隔された少なくとも2つの列と位置合わせされている、半径方向に離隔された少なくとも2つの列に配置され、上記開口部の各列が異なる軸方向位置に配置されていることを特徴とする、37に記載の外科装置。
39.上記第2の把持面は、ステープルを閉じるよう構成されたステープルガイドを形成し、上記ステープルガイドは、ステープルプッシャフィンガの半径方向に離隔した上記少なくとも2つの列と位置合わせされている、半径方向に離隔した少なくとも2つの列に配置され、上記ステープルガイドの各列が異なる軸方向位置に配置されていることを特徴とする、38に記載の外科装置。
40.上記第1および第2の駆動体は、各回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は少なくとも1つのモータによって選択的に回転されることを特徴とする、39に記載の外科装置。
41.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
ステープル留め要素を含むハウジングであって、上記ステープル留め要素が複数のスロットと上記スロット内に格納されたステープルとを画定するステープルカートリッジを含み、ステープルプッシャが上記複数のスロットと位置合わせされるステープルプッシャフィンガを有するハウジングと、
上記ステープルカートリッジおよび上記ステープルプッシャを共に収縮位置と中間位置との間で移動させるよう構成された駆動体であって、上記中間位置で上記ステープルプッシャを伸長位置へ上記ステープルカートリッジに対して移動させる駆動体と、
を備える外科装置。
42.上記駆動体が上記収縮位置と上記中間位置との間で上記ステープルカートリッジと上記ステープルプッシャとを共に移動させるときに、上記ステープルカートリッジと上記ステープルプッシャとの相対的位置を維持するよう構成された干渉要素をさらに含むことを特徴とする、41に記載の外科装置。
43.上記中間位置は、上記ステープルカートリッジが組織の区画を十分に把持する位置と、上記ステープルカートリッジが上記ハウジングに対して所定位置に軸方向に係止される位置とのいずれかであることを特徴とする、41に記載の外科装置。
44.上記中間位置は、上記ステープルカートリッジが十分に組織の区画を把持する位置であることを特徴とする、41に記載の外科装置。
45.上記干渉要素は、脆性の構成要素であることを特徴とする、42に記載の外科装置。
46.上記干渉要素は、上記ステープルプッシャに結合されており、所定の圧力まで上記
ステープルカートリッジの一部分との接触を維持する、軸方向に延在するリブを含むことを特徴とする、42に記載の外科装置。
47.刃部をさらに含み、上記干渉要素の上記軸方向に延在するリブが、上記ステープルカートリッジの反対側に配設された半径方向に延在するリブと上記刃部とに接触することを特徴とする、46に記載の外科装置。
48.上記所定の圧力に達したとき、上記干渉要素の上記半径方向に延在するリブは、上記ステープルカートリッジの上記反対側に配設された半径方向に延在するリブと上記刃部との間を移動し、それによって上記ステープルプッシャを上記ステープルカートリッジに対して移動させることが可能になることを特徴とする、47に記載の外科装置。
49.アンビルをさらに備え、上記アンビルに対して上記ステープルが上記ステープルプッシャによって押圧されることを特徴とする、48に記載の外科装置。
50.上記第1の駆動体は、回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は制御装置の制御下で少なくとも1つのモータによって選択的に回転されることを特徴とする、49に記載の外科装置。
51.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
ハウジングと、
上記ハウジングの遠位端に配置され、上記スロット内に格納された複数のスロットおよびステープルを形成するステープルカートリッジと、
上記ステープルカートリッジに対して近位側に配置され、上記複数のスロットと位置合わせされる複数のステープルプッシャフィンガを有するステープルプッシャと、
上記ステープルプッシャに対して近位側に配置され、上記ハウジング内で回転されると同時に上記ステープルカートリッジに対して遠位側に前進するよう構成されたプッシャ要素であって、上記プッシャ要素は上記ステープルプッシャに向かって延在するカム要素を有し、その結果、上記カム要素が上記複数のステープルプッシャフィンガに対して順次押圧する、プッシャ要素と、
を備える外科装置。
52.上記プッシャ要素は、上記ステープルカートリッジに向かって長手方向に延在する回転可能な部材にキー結合されていることを特徴とする、51に記載の外科装置。
53.上記回転可能な部材は、スパイダーねじ要素の首部であることを特徴とする、52に記載の外科装置。
54.上記プッシャ要素に対して近位側に配置されたナットをさらに含み、上記ナットは雌ねじ孔を有し、上記回転可能な部材が螺刻され、上記ナットの上記雌ねじ孔は上記回転可能な部材と螺合することを特徴とする、53に記載の外科装置。
55.上記ナットは、上記ハウジングにキー結合され、その結果、上記回転可能な部材が回転すると上記ナットが遠位側に前進することを特徴とする、54に記載の外科装置。
56.上記ナットと上記プッシャ要素との間にベアリングをさらに備え、上記ベアリングは、上記ナットと上記プッシャ要素との間に実質的に摩擦のない接触を実現することを特徴とする、55に記載の外科装置。
57.上記ステープルプッシャフィンガが上記ステープルカートリッジの上記スロットから上記ステープルを完全に押し出すために、上記プッシャ要素が一回転を超えて回転するよう構成されていることを特徴とする、56に記載の外科装置。
58.上記プッシャ要素に対して遠位側に配置された切断要素をさらに含むとともに、上記プッシャ要素によって押圧されるよう構成されていることを特徴とする、51に記載の外科装置。
59.上記切断要素が上記ステープルカートリッジの把持面に配置された組織の区画を切断するために、上記プッシャ要素が一回転を超えて回転するように構成されていることを特徴とする、58に記載の外科装置。
60.上記回転式部材は第1の駆動体によって回転されるように構成され、上記第1の駆動体は制御装置の制御下で少なくとも1つのモータによって選択的に回転されることを特
徴とする、52に記載の外科装置。
61.患者の開口部と通路とのいずれかに外科装置を挿入することを容易にするためのスリーブであって、
上記外科装置は、
上記外科装置の少なくとも一部分を被覆するよう構成された第1の部分と
少なくとも1つの閉包要素であって、上記外科装置の上記遠位端の上記断面よりも小さい断面へ先細となる挿入位置と、上記外科装置が上記閉包要素を介して上記患者の上記開口部と上記通路とのいずれかで外科手術を実施するよう構成される収縮位置との間で選択的に移動可能な少なくとも1つの閉包要素と、
を備えるスリーブ。
62.上記少なくとも1つの閉包要素は、対向して配設された一対の閉包要素を含むことを特徴とする、61に記載の外科装置。
63.上記対向して配設された一対の閉包要素は、カモノハシの形状を有することを特徴とする62に記載の外科装置。
64.上記対向して配設された一対の閉包要素は、上記スリーブの上記第1の部分から延在するフラップに取り付けられていることを特徴とする、62に記載の外科装置。
65.上記少なくとも1つの閉包要素はリングを含み、上記挿入位置において、上記リングによって形成される軸が上記外科装置によって形成される長手方向の軸に実質的に直交することを特徴とする、61に記載の外科装置。
66.上記少なくとも1つの閉包要素は、上記スリーブの上記第1の部分が上記外科装置に対して近位側に移動することによって、上記収縮位置に移動可能であることを特徴とする、61に記載の外科装置。
67.上記スリーブは、比較的高度な潤滑性を有する材料から形成されていることを特徴とする、61に記載の外科装置。
68.上記スリーブは、オートクレーブ滅菌可能な材料から形成されていることを特徴とする、61に記載の外科装置。
69.上記スリーブは、上記外科装置の形状に従う外形を有することを特徴とする、61に記載の外科装置。
70.アンビルおよびハウジングを有する外科用アタッチメントを使用して組織の区画の切断とステープル留めのうち少なくとも1つを行う方法であって、
上記アンビルを上記ハウジングに機械的に取り付けるステップと、
第1の駆動体で、上記アンビルを上記ハウジングに対して開位置と閉位置との間の中間位置へ移動させるステップと、
第2の駆動体で、上記ハウジングの少なくとも一部分を上記アンビルに対して上記中間位置と上記閉位置との間で移動させるステップと、
を含む方法。
71.上記ハウジングの上記少なくとも一部分を上記アンビルに対して上記閉位置に移動させるステップが、上記アンビルの第1の把持面と上記ハウジングの第2の把持面との間で組織の区画を把持することを含むことを特徴とする、70に記載の方法。
72.上記第2の駆動体で、収縮位置と伸長位置との間で切断要素を駆動するステップをさらに含む、71に記載の方法。
73.上記第2の駆動体で、収縮位置と伸長位置との間でステープル留め要素を駆動するステップをさらに含むことを特徴とする、71に記載の方法。
74.上記第2の駆動体で、収縮位置と伸長位置との間でステープルカートリッジを上記ハウジング内で軸方向に駆動するステップをさらに含むことを特徴とする、71に記載の方法。
75.上記ステープルカートリッジの各ステープルスロット内にステープルを格納するステップと、
上記第2の駆動体でステープルプッシャを駆動するステップと、
上記ステープルプッシャで上記ステープルを上記アンビル内のステープルガイド内に押し
込むステップと、
をさらに備えることを特徴とする、74に記載の方法。
76.上記アンビルを上記ハウジングに対して上記中間位置で軸方向に係止するステップをさらに備えることを特徴とする、71に記載の方法。
77.上記第1および第2の駆動体をそれぞれの回転可能な駆動軸に取り付けるステップと、上記回転可能な駆動軸を少なくとも1つのモータによって選択的に回転させるステップとをさらに備えることを特徴とする、71に記載の方法。
78.上記選択的に回転させるステップが、上記回転可能な駆動軸を制御装置の制御下で選択的に回転させることを含むことを特徴とする、77に記載の方法。
79.組織の区画をステープル留めする方法であって、
ステープルプッシャに対して選択的に移動可能であるハウジング内にステープルを格納するステップと、
アンビルを上記ステープルプッシャおよび上記ハウジングに対して移動させるステップであって、上記アンビルを移動させると上記ハウジングが上記ステープルプッシャに対して移動するステップと、
を備える方法。
80.上記移動させるステップが、上記アンビルが上記ハウジングの把持面から離隔される第1の位置と、上記アンビルが上記ハウジングの上記把持面と接触する第2の位置との間で、上記アンビルを上記ステープルプッシャに対して移動させることを含むことを特徴とする、79に記載の方法。
81.上記移動させるステップが、上記第2の位置と、上記ハウジングに格納された上記ステープルが上記ステープルプッシャによって上記ハウジングから押し出されて上記アンビルに対して閉じられる第3の位置との間で、上記アンビルを上記ステープルプッシャに対して移動させることを含むことを特徴とする、80に記載の方法。
82.上記第2の位置と上記第3の位置との間で上記アンビルを移動させるステップが、上記ハウジングを上記ステープルプッシャに対して移動することを含むことを特徴とする、81に記載の方法。
83.上記ハウジングを剪断ピンによって上記ステープルプッシャに結合するステップをさらに備えることを特徴とする、82に記載の方法。
84.上記アンビルで、所定量の圧力を上記ハウジングの上記把持面に作用させるステップと、
上記アンビルが上記第2の位置と上記第3の位置との間で移動するよう上記剪断ピンを剪断するステップと、
をさらに備えることを特徴とする、83に記載の方法。
85.上記ハウジングの複数のステープルスロットを、上記ステープルプッシャから延在する、対応する複数のプッシャフィンガと位置合わせするステップをさらに備えることを特徴とする、84に記載の方法。
86.上記アンビルを上記ハウジングおよび上記ステープルプッシャに対して移動させるステップが、上記アンビルを第1の駆動体で移動させることを含むことを特徴とする、85に記載の方法。
87.上記アンビルが上記第2の位置と上記第3の位置との間で上記ステープルプッシャに対して移動されるとき、上記アンビルと上記ハウジングの上記把持面との間に配置された組織を切断要素で切断するステップをさらに含むことを特徴とする、86に記載の方法。
88.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
孔部を形成するハウジングと、
上記ハウジングに対して移動可能となるよう上記ハウジングの上記孔部を介して配設されたトロカール軸と、
上記トロカール軸に取り付け可能であり、少なくとも一部分が可撓性を有するアンビル軸
を有するアンビルとを備え、
上記トロカール軸と上記アンビル軸のうちの第1の軸がトロカール受容スロットを形成し、上記トロカール軸と上記アンビル軸のうちの第2の軸が、上記トロカール受容スロット内に挿入可能となるよう構成されたトロカールを含む外科装置。
89.上記トロカール軸の少なくとも一部分は、可撓性を有していることを特徴とする、88に記載の外科装置。
90.上記トロカール受容スロットは、上記トロカール受容スロットと連通する軸方向に延在する孔部を有するケーブル伸長要素内に形成されることを特徴とする、88に記載の外科装置。
91.上記軸方向に延在する孔部が、上記トロカールをその中に挿入可能である広い部分と、上記トロカールを上記軸方向に延在する孔内に保持する狭い部分とを有することを特徴とする、90に記載の外科装置。
92.上記トロカール軸と上記アンビル軸のうちの第1の軸が付勢要素を含み、上記付勢要素は、上記トロカールを上記トロカール受容スロットに挿入することを可能にするよう移動可能であり、上記付勢要素は、上記トロカールを上記軸方向に延在する孔部の上記狭い部分内に保持するために上記トロカールを上記軸方向に延在する孔部の上記狭い部分に向かって付勢するよう構成されていることを特徴とする、91に記載の外科装置。
93.上記付勢要素は、ばねに結合されたプランジャを含むことを特徴とする、92に記載の外科装置。
94.上記トロカール軸と上記アンビル軸のうちの第2の軸は、上記ケーブル伸長要素の上記軸方向に延在する孔部の上記狭い部分に対して着座するよう構成された第1の部分を含むことを特徴とする、93に記載の外科装置。
95.上記第1の部分は形状において球状であることを特徴とする、94に記載の外科装置。
96.上記トロカール軸は、上記ハウジング内の少なくとも1つの駆動体の動作によって、伸長位置と収縮位置との間で上記ハウジングに対して移動可能であることを特徴とする、95に記載の外科装置。
97.上記駆動体は、回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は少なくとも1つのモータによって選択的に回転可能であることを特徴とする、96に記載の外科装置。
98.上記回転可能な駆動軸が制御装置の制御下で選択的に回転されることを特徴とする、97に記載の外科装置。
99.組織の区画の切断およびステープル留めのうち少なくとも1つを行うための外科装置であって、
孔部を形成するハウジングと、
上記ハウジングに対して移動可能となるように上記ハウジングの上記孔部を通じて配設された、少なくとも一部分が可撓性を有するトロカール軸と、
上記トロカール軸に取り付け可能であり、上記トロカール軸の移動によって上記ハウジングに対して移動可能となるよう構成されたアンビルと、
を備える外科装置。
100.上記アンビルはアンビル軸を含み、上記アンビル軸はトロカール受容スロットを形成し、上記トロカール軸は、上記トロカール受容スロット内に挿入可能となるよう構成されたトロカールを含むことを特徴とする、99に記載の外科装置。
101.上記トロカール受容スロットは、上記トロカール受容スロットと連通する軸方向に延在する孔部を有するアンビルスリーブ内に形成されることを特徴とする、100に記載の外科装置。
102.上記軸方向に延在する孔部は、上記トロカールをその中に挿入可能である広い部分と、上記トロカールを上記軸方向に延在する孔部内に保持する狭い部分とを有することを特徴とする、101に記載の外科装置。
103.上記トロカール軸は、上記ハウジング内の少なくとも1つの駆動体の動作によっ
て、伸長位置と収縮位置との間で上記ハウジングに対して移動可能であることを特徴とする、102に記載の外科装置。
104.上記駆動体は回転可能な駆動軸に取り付け可能であり、上記回転可能な駆動軸は少なくとも1つのモータによって選択的に回転されることを特徴とする、103に記載の外科装置。
105.上記回転可能な駆動軸は制御装置の制御下で選択的に回転されることを特徴とする、104に記載の外科装置。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態による電気機械式外科システムの斜視図である。
【図2】本発明の一実施形態による遠隔式パワーコンソールの斜視図である。
【図3】図1に示す電気機械式外科システムの可撓性軸の、一部を断面で示した側面図である。
【図4】図3の配線4−4に沿う可撓性軸の断面図である。
【図5(a)】図3に示す可撓性軸の第1継手の背面図である。
【図5(b)】図3に示す可撓性軸の第2継手の正面図である。
【図6(a)】図1に示す電気機械式外科システムのモータ配置を示す概略図である。
【図6(b)】図1に示す電気機械式外科システムの概略図である。
【図6(c)】図3および4に示す可撓性軸のエンコーダの概略図である。
【図6(d)】本発明の一実施形態によるメモリ素子の概略図である。
【図6(e)】本発明の一実施形態による無線RCUの概略図である。
【図6(f)】本発明の一実施形態による配線式RCUの概略図である。
【図7(a)】本発明の一実施形態による取手部の正面斜視図である。
【図7(b)】図7(a)に示す取手部の背面斜視図である。
【図7(c)】図7(a)に示す取手部の分解正面斜視図である。
【図7(d)】図7(a)に示す取手部の頂面図である。
【図7(e)】配線A−Aに沿う図7(d)に示す取手部の側断面図である。
【図7(f)】配線B−Bに沿う図7(d)に示す取手部の側断面図である。
【図8】本発明の一実施形態による、伸長位置にある切断およびステープリング要素の斜視図である。
【図9】本発明の一実施形態による、ある程度閉じた切断およびステープリング要素を示す斜視図である。
【図10(a)】本発明の一実施形態によるアンビルアセンブリの構成要素を示す斜視図である。
【図10(b)】本発明の一実施形態による、分解した状態のステープルおよび刃の部分の構成要素の一部を示す斜視図である。
【図10(c)】本発明の一実施形態による、分解した状態のステープルおよび刃の部分の残りの構成要素を示す斜視図である。
【図11(a)】本発明の一実施形態による切断およびステープリング要素を示す上断面図である。
【図11(b)】本発明の一実施形態による切断およびステープリング要素を示す側断面図である。
【図12】図12(a)は、本発明の一実施形態による切断およびステープリング要素の斜視図である。図12(b)は、本発明の一実施形態によるケーブル伸長要素の付加的機能を示す側断面図である。図12(c)は、本発明の一実施形態によるケーブル伸長要素の付加的機能を示す側断面図である。
【図13−1】図13(a)は、本発明の他の実施形態による取手部を示す図である。図13(b)は、本発明の他の実施形態による取手部を示す図である。
【図13−2】図13(c)は、本発明の他の実施形態による取手部を示す図である。
【図14−1】図14(a)は、本発明の他の実施形態による、組み立てられかつある程度閉じた位置にある切断およびステープリング要素を示す正面斜視図である。図14(b)は、組み立てられかつ部分的に閉じられた配置にある、図14(a)に示す切断およびステープリング要素を示す背面斜視図である。
【図14−2】図14(c)は、組み立てられかつ部分的に閉じられた配置にある、図14(a)に示す切断およびステープリング要素を示す側面図である。図14(d)は、組み立てられかつ部分的に閉じられた配置にある、図14(a)に示す切断およびステープリング要素を示す背面図である。
【図15−1】図15(a)は、本発明の他の実施形態によるアンビルアセンブリの構成要素を示す分解正面図である。図15(b)は、図15(a)に示すステープルおよび刃の部分の構成要素の一部を示す分解斜視図である。
【図15−2】図15(c)は、図15(a)に示すステープルおよび刃の部分の構成要素の残りを示す分解斜視図である。
【図15−3】図15(d)は、図15(a)に示すステープルおよび刃の部分の構成要素の一部を示す組立側断面図である。
【図16】本発明の他の実施形態による外科用アタッチメントのある構成要素を概略的に示す側断面図である。
【図17】本発明の他の実施形態による外科用アタッチメントのある構成要素を概略的に示す側断面図である。
【図18−1】図18(a)は、本発明の他の実施形態によるステープルおよび刃の部分の構成要素の一部を示す分解斜視図である。
【図18−2】図18(b)は、図18(a)に示すステープルおよび刃の部分の構成要素を示す組立側断面図である。
【図19−1】図19(a)は、本発明の一実施形態による、外科装置を被覆するよう構成されたスリーブの分解斜視図である。
【図19−2】図19(b)は、閉位置にある図19(a)に示すスリーブの一部の側断面図である。図19(c)は、開位置にある図19(a)に示すスリーブの閉被要素を示す図である。
【図19−3】図19(d)は、本発明の他の実施形態による、挿入位置にある外科装置を被覆するよう構成されたスリーブの斜視図である。図19(e)は、収縮位置にある図19(d)に示すスリーブの斜視図である。
【発明を実施するための形態】
【0015】
(詳細な説明)
本発明は、電気機械式外科システムに関する。図1は、本発明の一実施形態による電気機械式外科システム10の斜視図である。
【0016】
図1に示すように、電気機械式外科システム10は遠隔式パワーコンソール12を備え、この遠隔式パワーコンソール12は、遠隔式パワーコンソール12から延在延在する可撓性軸20を有する遠隔式パワーコンソール。可撓性軸20は、少なくとも第1の回転可能な駆動軸30および第2の回転可能な駆動軸32を含む。遠隔式パワーコンソール12のさらなる詳細については、たとえば図2と関連させて説明し図示する。可撓性軸20のさらなる詳細については、たとえば図3から図6と関連させて説明し図示する。
【0017】
可撓性ケーブル20の遠位端24にある継手26には、外科用アタッチメント100が取り付けられているか、または取り付け可能である。外科用アタッチメント100は外科手術を実施するために構成されている。例示のみを目的として、外科用アタッチメントを、吻合手技などを実施するために構成された、円形の把持、切断、およびステープル留めの装置であるものとして後述に説明する。ただし、外科用アタッチメントは任意の適切な
種類の外科装置とすることができることは理解されるべきである。さらに、例示のみを目的として、後述する外科用アタッチメントを、患者の口部通路(oralpassage)内で用いられるものとして説明する。ただし、外科用アタッチメントは患者の任意の種類の開口部または通路内で利用することができることは理解されるべきである。好都合なことに、後述の外科用アタッチメントは、比較的小さな断面積を有し、よって患者の口部通路などへの挿入が容易である。
【0018】
外科用アタッチメント100は取手部102を含むことができる。取手部102の近位端102aは、可撓性ケーブル20の遠位端24で継手26に取付け可能である。外科用アタッチメント100はまた可撓性軸104を含むことができ、少なくとも第1の駆動軸104aおよび第2の駆動軸104bがこの可撓性軸104を通って延在している延在取手部102の遠位端102bは可撓性軸104の近位端104aに取付け可能である。可撓性軸104は、組織適合可能で、滅菌可能なエラストマー材料で形成することができる。好ましくは、可撓性軸104はオートクレーブ滅菌可能な材料で形成することができる。さらに、可撓性軸104は、高度な、または比較的高度な潤滑性を有する材料で形成することができる。たとえば、可撓性軸104は、テフロン(登録商標)(すなわち、ポリテトラフルオロエチレン(PTFE)などのフルオロポリマー)、シリコーン樹脂、たとえばSIL−KORE(登録商標)(W.L.Gore&Associates社製)
などのテフロン(登録商標)/シリコーンの組合せ、伸展テフロン(登録商標)等の「EPTFE」などの材料で形成することができる。利用することができるその他の好適な材料およびシール処理については、本出願人による同時係属中の、2002年3月15日に出願された特許文献15にさらに詳細に記載されており、この特許文献15はその全体が参照により本明細書に明らかに組み込まれている。
【0019】
外科用アタッチメント100はまた、切断およびステープル留め用部品103を含むことができる。可撓性軸104の遠位端104bは、切断およびステープル留め用部品103の近位端103aに取り付けられているか、または取付け可能である。切断およびステープル留め用部品103の例示的実施形態の1つを図8から図12(c)に示す。図8に示すように、切断およびステープル留め用部品103はステープルおよび刃の部分106を含む。ステープルおよび刃の部分106の中心に配設された開口部を通って、柔軟とすることが可能なケーブルなどのトロカール軸(trocalshaft)108が軸方向に延在延在している。トロカール軸108の遠位端108aには、トロカール(trocal)110が配設されている。トロカール110はアンビルアセンブリ(anvilassembly)112と係合するように構成されている。外科用アタッチメント100は、以下でより詳細に述べるように、アンビルアセンブリ112をステープルおよび刃の部分106に対して伸長および収縮させるなど選択的に動かすことができるように構成されている。
【0020】
図2を参照すると、本発明の例示的実施形態による遠隔式パワーコンソール12および電気機械式外科システム10の可撓性軸20の斜視図が示されている。遠隔式パワーコンソール12は、フロントパネル15を有するハウジング14を含むことができる。フロントパネル15には、表示装置16および表示器18a、18bが装着されており、これらについては以下でより詳細に説明する。可撓性軸20はハウジング14から延在することができ、第1継手22を介してハウジング14に着脱可能に固定することができる。可撓性軸20の遠位端24は継手26などの第2継手を含むことができ、この第2継手は、外科用アタッチメント100を可撓性軸20の遠位端24に着脱可能に固定する。
【0021】
図3を参照すると、一部を切り欠いた、可撓性軸20の側面図が示されている。一実施形態によれば、可撓性軸20はチューブ状の被覆部28を含み、この被覆部28は、その内側流路40と環境との間を液密にシールするための、コーティングまたはその他のシー
ル処理を含むことができる。被覆部28は、可撓性軸104に関連して先に列挙した材料など、組織適合可能で滅菌可能なエラストマー材料で構成することができる。さらに、被覆部28はまた、オートクレーブ滅菌可能な材料で形成することもできる。第1の回転可能な駆動軸30および第2の回転可能な駆動軸32、ならびに第1のステアリングケーブル34、第2のステアリングケーブル35、第3のステアリングケーブル36、第4のステアリングケーブル37およびデータ伝送ケーブル38が、可撓性軸20の内側流路40内に配設され、可撓性軸20の全長にわたって延在している。図4は、図3の配線4−4に沿った可撓性軸20の断面図であり、複数のケーブル30、32、34、35、36、37、38をさらに示している。ステアリングケーブル34、35、36、37の各遠位端は、可撓性軸20の遠位端24に固定される。複数のケーブル30、32、34、35、36、37、38のそれぞれが、被覆材を有することができる。
【0022】
第1の回転可能な駆動軸30および第2の回転可能な駆動軸32は、例えば編組の、またはつる巻きの駆動ケーブルのような、高度な柔軟性を有する駆動軸として構成することができる。そのような高度な柔軟性を有する駆動ケーブルは、制限されたトルク伝達特性および機能を有することは理解されるべきである。また、図1に示しつつ以下で説明する外科用アタッチメント100は、第1および第2の回転可能な駆動軸30、32によって伝達可能なトルクよりも高いトルク入力を必要とする場合があることも理解されるべきである。したがって、第1および第2の回転可能な駆動軸30、32は、低トルクを高速で伝達するよう構成しても良く、その高速/低トルクは、たとえば、外科用アタッチメント100及び/又は遠隔式パワーコンソール12において可撓性駆動軸20の遠位端24及び/又は近位端20aに配設されたギヤ装置によって、低速/高トルクに変換される。このようなギヤ装置は、ハウジング14内に配設されたモータと可撓性軸20に着脱可能に取付け可能な外科用アタッチメント100との間のパワートレインに沿った任意の適切な場所に設けることができることは理解されるべきである。そのようなギヤ装置は、たとえばスパーギヤ装置、プラネタリギヤ装置、ハーモニックギヤ装置、サイクロイド駆動装置、エピサイクリックギヤなどを包含してよい。
【0023】
図5(a)を参照すると、第1の継手22の背面図が示されている。第1の継手22は、第1のコネクタ44、第2のコネクタ48、第3のコネクタ52および第4のコネクタ56を含み、これらのそれぞれが第1の継手22に回転可能に固定されている。コネクタ44、48、52、56のそれぞれは、穴部46、50、54、58をそれぞれ含む。図5(a)に示すように、穴部46、50、54、58それぞれは六角形状とすることができる。ただし、以下でさらに詳細に説明するように、穴部46、50、54、58は、コネクタ44、48、52、56をハウジング12内に収容されたモータ装置の各駆動軸に回転できないように連結しかつ強固に取り付けるための任意の形状および構成を有することができることは理解されるべきである。以下に説明するように、モータ装置の各駆動軸上に補足的な突起を設けて、それによって可撓性軸20の駆動要素を駆動することができることは理解されるべきである。また、駆動軸上に穴部を設けることができ、かつコネクタ44、48、52、56上に補足的な突起を設けることができることも理解されるべきである。回転しないように、かつ緩めることができるようにコネクタ44、48、52、56とモータ装置の駆動軸とを連結するよう構成されたその他の継手装置を設けても良い。
【0024】
コネクタ44、48、52、56のうちの1つは第1の回転可能な駆動軸30に回転しないように固定され、コネクタ44、48、52、56のうちの別の1つは第2の回転可能な駆動軸32に回転しないように固定される。コネクタ44、48、52、56のうちの残りの2つは、ステアリングケーブル34、35、36、37に対して張力を作用させるよう構成された伝達要素と係合して、それによって可撓性軸20の遠位端20bを操作する。データ伝送ケーブル38はデータコネクタ60と電気的かつデータ転送が可能なよ
うに接続される。データコネクタ60は、たとえば、データケーブル38に収容された個々の電線に対応するとともに、その電線の数に等しい数の電気接点62を含む。第1の継手22は、遠隔式パワーコンソール12に配設された嵌合式でかつ補足的な継手装置に第1の継手22を適切に方向付けるキー構造42を含む。そのようなキー構造42は、第1の継手22と、遠隔式パワーコンソール12に配設された嵌合式でかつ補足的な継手装置との一方または両方に設けることができる。第1の継手22は、たとえば簡潔な押圧動作を使用して第1の継手22をハウジング12に係合させることができるクイックコネクト(quickconnct)形式のコネクタを含むことができる。シール部材は、、第1の継手22の内側と環境との間を液密にシールするために、複数のコネクタ44、48、52、56、60のいずれにも付加して設けることができる。
【0025】
図5(b)を参照すると、可撓性軸20の第2の継手26の正面図が示されている。第2の継手26は第1のコネクタ66および第2のコネクタ68を含み、これらのコネクタはそれぞれ、第2の継手26に回転可能に固定され、第1および第2の回転可能な駆動軸30、32のそれぞれの遠位端に回転しないように固定されている。クイックコネクト形式の管継手64は第2の継手26に設けられ、外科用アタッチメント100を第2の継手に着脱可能に固定している。クイックコネクト形式の管継手64は、たとえば回転式クイックコネクト形式の管継手、差込み形式の管継手などとすることができる。第2の継手26には、外科用器具またはアタッチメントを第2の継手26に適切に位置合わせするためのキー構造74が設けられている。キー構造74または外科用アタッチメント100を可撓性軸20に適切に位置合わせするためのその他の装置は、第2の継手26と外科用アタッチメント100とのいずれか一方または両方に設けることができる。さらに、クイックコネクト形式の管継手を外科用アタッチメント100に設けることもできる。また電気接点72を有するデータコネクタ70が第2の継手26に設けられる。第1の継手22のデータコネクタ60と同様に、第2継手26のデータコネクタ70は、データ伝送ケーブル38の各電線およびデータコネクタ60の接点62に電気的かつデータ転送が可能なように接続された接点72を含む。シール部材は、コネクタ66、68、70に付加して設けられて良く、第2の継手26の内側と環境との間を液密にシールしている。
【0026】
遠隔式パワーコンソール12のハウジング14内には、駆動軸30、32およびステアリングケーブル34、35、36、37を駆動して、それによって電気機械式外科用システム10と第2の継手26に取り付けられた外科用アタッチメント100とを操作するよう構成された電気機械式駆動要素が配設されている。図6(a)に概略的に示した例示的実施形態においては、それぞれが電源を介して動作する5つの電気モータ76、80、84、90、96を遠隔式パワーコンソール12内に配設することができる。ただし、適切な任意の個数のモータを設けることができ、これらのモータは電池の電力、線電流、DC電源、電気的に制御されたDC電源などを介して動作することができることは理解されるべきである。また、モータはDC電源に接続することができ、そのDC電源が線電流に接続され、動作電流をモータに供給することもできることは理解されるべきである。
【0027】
図6(a)はモータの1つの可能な配置を概略的に示している。、第1の継手22およびそれに伴って可撓性軸20がハウジング14に係合するとき、第1のモータ76の出力軸78は第1の継手22の第1のコネクタ44と係合し、それによって第1の駆動軸30と、第2の継手26の第1のコネクタ66とを駆動する。同様に、第1の継手22およびそれに伴って可撓性軸20がハウジング14と係合されるとき、第2のモータ80の出力軸82は、第1の継手22の第2のコネクタ48と係合し、それによって第2の駆動軸32と、第2の継手26の第2のコネクタ68とを駆動する。第1の継手22およびそれに伴って可撓性軸20がハウジング14と係合されるとき、第3のモータ84の出力軸86は、第1の継手22の第3のコネクタ52と係合し、それによって第1の滑車装置88を介して第1および第2のステアリングケーブル34、35を駆動する。第1の継手22お
よびそれに伴って可撓性軸20がハウジング14と係合されるとき、第4のモータ90の出力軸92は、第1の継手22の第4のコネクタ56と係合し、それによって第2の滑車装置94を介して第3および第4のステアリングケーブル36、37を駆動する。第3および第4のモータ84、90はキャリッジ(carriage)100上に固定することができ、このキャリッジ100は、第5のモータ96の出力軸98を介して第1の位置と第2の位置との間で選択的に移動可能であり、第3および第4のモータ84、90を各プーリー装置88、94に選択的に係合および分離させ、それによって可撓性軸20を必要に応じて緊張させて操作可能にし、または弛緩させる。その他の機械的、電気的または電気機械的な機構を使用して、ステアリング機構を選択的に係合および分離することができることは理解されるべきである。モータは、たとえば、参照によりその全文が本明細書に明確に組み込まれる、発明の名称が「ACarriageAssembly for C
ontrolling a Steering Wire Mechanism Withi
n a Flexible Shaft」である特許文献8に記載されているように配置お
よび構成することができる。
【0028】
モータ76、80、84、90、96のうちのずれか1つまたは複数を高速/低トルクモータまたは低速/高トルクモータとすることができることは理解されるべきである。上記のように、第1の回転可能な駆動軸30および第2の回転可能な駆動軸32は、高速かつ低トルクを伝達するよう構成することができる。したがって、第1のモータ76および第2のモータ80は高速/低トルクモータとして構成することができる。代替的に、第1のモータ76および第2のモータ80は、第1のモータ76および第2のモータ80と、第1の回転可能な駆動軸30および第2の回転可能な駆動軸32のそれぞれとの間にトルク低減/速度増幅ギヤ装置を配設して、低速/高トルクモータとして構成することもできる。そのようなトルク低減/速度増幅ギヤ装置は、たとえばスパーギヤ装置、プラネタリギヤ装置、ハーモニックギヤ装置、サイクロイド駆動装置、エピサイクリックギヤなどを包含してよい。そのようなギヤ装置は、遠隔式パワーコンソール12の内部、または、例えば第1の継手22内など、可撓性軸20の近位端内に配設することができることは理解されるべきである。ギヤ装置は、第1の回転可能な駆動軸30及び/又は第2の回転可能な駆動軸32の遠位端及び/又は近位端に設けられ、それらの巻上げ(windup)および破損を防止することは理解されるべきである。
【0029】
図6(b)を参照すると、電気機械式外科システム10の概略図が示されている。制御装置装置1122は遠隔式パワーコンソール12のハウジング14内に設けられており、電気機械式外科システム10と、可撓性軸20に取り付けられた外科用アタッチメント100とのすべての機能および動作を制御するように構成されている。記憶装置1130が設けられており、この記憶装置はROMコンポーネント1132及び/又はRAMコンポーネント1134などの記憶素子を包含してよい。ROMコンポーネント1132は配線1136を介して制御装置1122と電気的かつデータ転送が可能なように通じており、RAMコンポーネント1134は配線1138を介して制御装置1122と電気的かつデータ転送が可能なように通じている。RAMコンポーネント1134は、たとえば磁気記憶装置、光学記憶装置、磁気光学記憶装置、電気的記憶装置など、任意の種類のランダムアクセス記憶装置を包含してよい。同様に、ROMコンポーネント1132は、たとえば、PCカードやPCMCIAタイプの装置等の取外し可能な記憶装置など、任意の種類の読出し専用記憶装置を包含してよい。ROMコンポーネント1132およびRAMコンポーネント1134は単一のユニットとして統合しても、または個別のユニットとしても良く、ROMコンポーネント1132及び/又はRAMコンポーネント1134はPCカードまたはPCMCIAタイプの装置の形式で設けられても良いことは理解されるべきである。制御装置1122はさらに、ハウジング14のフロントパネル15に、より具体的には配線1154を介して表示装置16に、また、各配線1156、1158を介して表示器18a、18bに接続される。配線1116、1118、1124、1126、112
8は、それぞれ第1、第2、第3、第4および第5のモータ76、80、84、90、96に制御装置1122を電気的かつデータ転送が可能なように接続する。配線式遠隔制御ユニット(「RCU」)1150は、配線1152を介して制御装置1122に電気的かつデータ転送が可能なように接続される。また無配線RCU1148が設けられ、この無配線RCU1148は、配線1144を介してトランシーバ1140に接続された送信/受信ユニット1146と、無線リンク1160を介して通信する。トランシーバ1140は、配線1142を介して制御装置1122に電気的かつデータ転送が可能なように接続される。無線リンク1160は、たとえば、赤外線リンクなどの光リンク、無線リンク(radiolink)またはその他の任意の形式の無線通信リンクとすることができる。
【0030】
スイッチ装置1186は、たとえばDIPスイッチの配列とすることができ、配線1188を介して制御装置1122に接続することができる。スイッチ装置1186は、たとえば、表示装置16上でのメッセージおよび指示の表示に使用される複数の言語のうちの1つを選択するために使用することができる。メッセージおよび指示は、たとえば電気機械式外科システム10の操作及び/又は状態、並びに/或いは電気機械式外科システム10に取り付けられた外科アタッチメントに関するものとすることができる。
【0031】
本発明の例示的実施形態によれば、第1のエンコーダ1106が第2の継手26の内部に設けられ、第1の駆動軸30の回転に応答し、かつそれに従って信号を出力するよう構成される。また、第2のエンコーダ1108が第2の継手26の内部に設けられ、第2の駆動軸32の回転に応答し、かつそれに従って信号を出力するよう構成される。エンコーダ1106、1108のそれぞれから出力される信号は、駆動軸30、32のそれぞれの回転位置、ならびにそれらの回転方向を表すことができる。そのようなエンコーダ1106、1108は、たとえばホール効果装置、光学装置などとすることができる。エンコーダ1106、1108は第2の継手26の内部に配設されているものとして説明しているが、エンコーダ1106、1108は、モータシステムと外科器具またはアタッチメントとの間の任意の場所に設けることができることは理解されるべきである。エンコーダ1106、1108を第2の継手26の内部、または可撓性軸20の遠位端に設けると、駆動軸の回転の正確な測定が可能となることは理解されるべきである。エンコーダ1106、1108が可撓性軸20の近位端に配設された場合、第1および第2の回転可能な駆動軸30、32の巻上げによって、測定誤差が生じる可能性がある。
【0032】
図6(c)はホール効果装置を含むエンコーダ1106、1108の概略図である。駆動軸30、32上には、N極1242およびS極1244を有する磁石1240が回転しないように装着されている。エンコーダ1106、1108はさらに第1のセンサー1246および第2のセンサー1248を含み、これらのセンサーは、駆動軸30、32の長軸または回転軸を中心として約90度離隔して配設される。センサー1246、1248の出力は継続的なものであり、その状態は、センサーの検出範囲内における磁場の極性変化の関数として変化する。したがって、エンコーダ1106、1108からの出力信号に基づいて、駆動軸30、32の角度位置は4分の1回転以内に特定することができ、駆動軸30、32の回転方向を特定することができる。各エンコーダ1106、1108の出力は、データ伝送ケーブル38の配線1110、1112それぞれを介して、制御装置1122へ伝送される。エンコーダ1106、1108からの出力信号に基づいて駆動軸30、32の角度位置および回転方向を追跡することによって、制御装置装置1122は、電気機械式外科システム10に結合された外科用アタッチメント100の構成要素の位置及び/又は状態を特定することができる。すなわち、駆動軸30、32の回転数を数えることによって、制御装置装置1122は、電気機械式外科システム10に結合された外科用アタッチメント100の構成要素の位置および/または状態を特定することができる。
【0033】
外科用アタッチメント100は、一実施形態によれば、図6(d)に示すように、第2
継手26のコネクタ70に電気的かつデータ転送が可能なように接続するような寸法および構成で設けられたデータコネクタ1272をさらに含むことができる。この例示的実施形態において、データコネクタ1272は、コネクタ70のリード72の数に等しい数の接点(図示せず)を含む。外科用アタッチメント100の内部には、データコネクタ1272に電気的かつデータ転送が可能なように接続された記憶装置1174が収容されている。記憶装置1174は、たとえばEEPROM、EPROMなどの形式とすることができ、たとえば外科用アタッチメント100のステープル及び刃の部分106の内部に収容することができる。
【0034】
図6(d)は記憶装置1174を図示している。図6(d)に示すように、データコネクタ1272は接点1276を含み、この接点1276のそれぞれは各配線1278を介して記憶装置1174に電気的かつデータ転送が可能なように接続される。記憶装置1174は、たとえばシリアル番号データ1180、アタッチメントタイプ識別子(ID)データ1182および使用データ(usagedata)1184を格納するよう構成されている。記憶装置1174はその他のデータを付加的に格納することができる。シリアル番号データ1180およびIDデータ1182の双方は、読取り専用データとして構成することができる。この例示的実施形態において、シリアル番号データ1180は特定の外科用アタッチメントを一意的に識別するデータであり、IDデータ1182は(たとえば、その他の種類のアタッチメントが装置で用いられるときに)アタッチメントの種類を識別するデータである。使用データ1184は、たとえば、以下でより詳細に示すように、外科用アタッチメント100のアンビルアセンブリ112が収縮または伸長された回数、または外科用アタッチメント100のステープルプッシャ220が前進(advance)、または留めた(fired)回数など、特定のアタッチメントの使用量を表す。
【0035】
可撓性軸20の遠位端24に取付け可能な外科用アタッチメント100は、一回または複数回使用するよう設計および構成することができることは理解されるべきである。外科用アタッチメント100はまた、所定回数使用するよう設計および構成することもできる。したがって、使用データ1184は、外科用アタッチメント100が使用されたかどうか、および使用回数が最大許容使用回数を超えたかどうかを確認するために使用することができる。以下でより詳細に説明するように、最大許容使用回数に到達した後に外科用アタッチメント100の使用を試みると、エラー状態が発生することになる。
【0036】
図6(b)を再び参照すると、本発明の例示的実施形態に従って、制御装置外科用アタッチメント100が可撓性軸20に最初に結合されたときに、制御装置1122が、外科用アタッチメント100の記憶装置1174からIDデータ1182を読み取るように構成されている。記憶装置1174は、データ伝送ケーブル38の配線1120を介して制御装置装置1122に電気的かつデータ転送が可能なように接続されている。制御装置1122は、読み取ったIDデータ1182に基づいて、可撓性軸20に結合された外科器具またはアタッチメントの種類に対応する動作プログラムまたはアルゴリズムを記憶装置1130から読み取る、または選択するように構成されている。記憶装置1130は、外科器具またはアタッチメントの利用可能な種類それぞれに対する動作プログラムまたはアルゴリズムを格納するよう構成されており、制御装置1122は、取り付けられた外科器具またはアタッチメントの記憶装置1174から読み取られたIDデータ1182に従って、記憶装置1130から動作プログラムまたはアルゴリズムを選択し及び/又は読み取る。上記のように、記憶装置1130は取外し式のROMコンポーネント1132及び/又はRAMコンポーネント1134を包含してよい。このようにすることによって、記憶装置1130に格納された動作プログラムまたはアルゴリズムは、必要に応じて更新、追加、削除、改善または修正することができる。記憶装置1130に格納された動作プログラムまたはアルゴリズムは、たとえば使用者の特殊な必要性に応じて部分的に変更できるようにすることができる。動作プログラムまたはアルゴリズムの部分的変更を容易にする
ために、たとえばキーボード、マウス、ポインティングデバイス、タッチスクリーンなどのデータ入力装置を、たとえばデータコネクタポートを介して記憶装置1130に接続することができる。代替的にまたは追加的に、動作プログラムまたはアルゴリズムは、電気機械式外科システム10から遠隔的に、記憶装置1130の内部にカスタマイズし、事前プログラムすることができる。シリアル番号データ1180及び/又は使用データ1184はまた、複数の動作プログラムまたはアルゴリズムのうちのどれが記憶装置1130から読み取られる、または選択されるかを決定するために使用することもできることは理解されるべきである。動作プログラムまたはアルゴリズムは、代替的に外科用アタッチメント100の記憶装置1174内に格納し、データ伝送ケーブル38を介して制御装置1122に伝送することができることは理解されるべきである。適切な動作プログラムまたはアルゴリズムが、制御装置1122によって読み取られる、もしくは選択されるか、または制御装置1122に伝送されると、使用者が配線式RCU1150および/または無配線RCU1148を介して実行した操作に従って、制御装置1122によって動作プログラムまたはアルゴリズムが実行される。上記に示したように、制御装置1122は、第1、第2、第3、第4および第5のモータ76、80、84、90、96に配線1116、1118、1124、1126、1128のそれぞれを介して電気的かつデータ転送が可能なように接続されており、読み取られ、選択された、または伝送された動作プログラムまたはアルゴリズムに従って、これらのモータ76、80、84、90、96を、配線1116、1118、1124、1126、1128のそれぞれを介して制御する。
【0037】
ここで図6(e)を参照すると、無線RCU1148の概略図が示されている。無線RCU1148は、四方ロッカー(four−way rocker)1310の下に配置
された複数のスイッチ1302、1304、1306、1308を有するステアリング制御装置1300を含む。ロッカー1310を介してスイッチ1302、1304を操作すると、第1および第2のステアリングケーブル34、35の動作が第3のモータ84を介して制御される。同様に、ロッカー1310を介してスイッチ1306、1308を操作すると、第3および第4のステアリングケーブル36、37の動作が第4のモータ92を介して制御される。ロッカー1310およびスイッチ1302、1304、1306、1308は、スイッチ1302、1304を操作すると可撓性軸20が南北方向に操作され、スイッチ1306、1308を操作すると可撓性軸20が東西方向に操作されるように配置されていることは理解されよう。本明細書における北、南、東、西とは、相対座標系に対するものである。代替的に、デジタルジョイスティック、アナログジョイスティックなどを、ロッカー1310およびスイッチ1302、1304、1306、1308の代わりに設けることができる。また、電位差計またはその他の種類の起動装置をスイッチ1302、1304、1306、1308の代わりに使用することもできる。
【0038】
無線RCU1148はステアリング係合/解放スイッチ1312をさらに含み、そのステアリング係合/解放スイッチ1312を操作すると、選択的にステアリング機構に係合したり、ステアリング機構を解放したりするよう第5のモータ96の動作が制御される。無線RCU1148はまた、第1および第2のスイッチ1316、1318を有する二方ロッカー1314を含み、第1および第2のスイッチ1316、1318は二方ロッカー1314によって操作可能とされている。これらのスイッチ1316、1318を操作すると、電気機械式外科システム10及び、取り付けられた外科用アタッチメントに対応する動作プログラムまたはアルゴリズムがある場合はその動作プログラムまたはアルゴリズムに従って外科用アタッチメント100など可撓性軸20に取り付けられた外科用アタッチメントの特定の機能が制御される。たとえば、外科器具が、図1に示し以下で説明するような外科用アタッチメント100である場合、二方ロッカー1314を操作すると、外科用アタッチメント100のアンビルアセンブリ112の伸長および収縮を制御することができる。無線RCUにはさらに別のスイッチ1320が設けられており、このスイッチ1320を操作すると、電気機械式システム10及び、取り付けられた外科用アタッチメ
ントに対応する動作プログラムまたはアルゴリズムがある場合はその動作プログラムまたはアルゴリズムに従って可撓性軸20に取り付けられた外科用アタッチメントの動作をさらに制御することができる。たとえば、外科用アタッチメント100が可撓性軸20に取り付けられているとき、スイッチ1320を操作すると、ステープルプッシャ220の前進、または発射(firing)のシーケンスを開始することができる。
【0039】
無線RCU1148は制御装置1322を含み、この制御装置1322は、配線1324を介してスイッチ1302、1304、1306、1308に、配線1326を介してスイッチ1316、1318に、配線1330を介してスイッチ1320に、電気的かつデータ転送が可能なように接続される。無線RCU1148は、フロントパネル15の表示器18a、18bに対応する表示器18a’、18b’と、フロントパネル15の表示装置16に対応する表示装置16’を含むことができる。これらが設けられる場合、表示器18a’、18b’は、各配線1332、1334を介して制御装置1322に電気的かつデータ転送が可能なように接続され、表示装置16’は配線1336を介して制御装置1322に電気的かつデータ転送が可能なように接続される。制御装置1322は配線1340を介してトランシーバ1338に電気的かつデータ転送が可能なように接続され、トランシーバ1338は配線1344を介して受信機/送信機1342に電気的かつデータ転送が可能なように接続される。図示はしないが、電池などの電源を無線RCU1148内に設け、この無線RCU1148に電源供給することができる。このように、無線RCU1148を使用して、電気機械式外科システム10と、可撓性軸20に取り付けられた任意の外科用アタッチメント100との動作を、無線リンク1160を介して制御することができる。
【0040】
無線RCU1148は、配線1349を介して制御装置1322に接続されたスイッチ1346を含むことができる。スイッチ1346を操作すると、データ信号が無線リンク1160を介して送信機/受信機1146に伝送される。このデータ信号は、無線RCU1148を一意的に識別する識別データを含む。この識別データは、電気機械式外科システム10が無許可で操作されることを防止するため、および他の無線RCUが電気機械式外科システム10の動作を干渉することを防止するために、制御装置1122によって使用される。無線RCU1148と電気機械式外科システム10との間の以降の通信ではそれぞれ、識別データを含めることができる。このようにして、制御装置1122は複数の無線RCU間を識別することができ、それによって単一の識別可能な無線RCU1148のみが、電気機械式外科システム10と可撓性軸20に取り付けられた任意の外科用アタッチメントとを制御することができる。
【0041】
エンコーダ1106、1108からの出力信号に従って測定された、可撓性軸20に取り付けられた外科用アタッチメント100の構成要素の位置に基づいて、制御装置1122は、取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムによって規定された、電気機械式外科システム10の機能を選択的に有効化または無効化することができる。たとえば、外科用アタッチメントが図1に示す外科用アタッチメント100である場合、スイッチ1320の操作によって制御されるステープル留め機能は、アンビルアセンブリ112とステープルおよび刃の部分106との間の空間または空隙が許容範囲内であると判断される場合を除いては無効化される。アンビルアセンブリ112とステープルおよび刃の部分106との間の空間または空隙は、先により詳細に説明したように、エンコーダ1106、1108からの出力信号に基づいて判断される。スイッチ1320自体は依然として動作可能であるが、制御装置1122は、空間または空隙が許容範囲内であると判断されない限り、対応する機能を実施することができないことは理解されるべきである。
【0042】
ここで図6(f)を参照すると、配線式RCU1150の概略図が示されている。この
例示的実施形態において、配線式RCU1150は、無線RCU1148と実質的に同じ制御要素を含み、そのような要素の更なる説明は省略する。同じ要素は、図6(f)において一重引用符(prime)を添えて示されている。電気機械式外科システム10と可撓性軸20に取り付けられた任意の外科用アタッチメントとは、配線式RCU1150によって及び/又は無線RCU1148によって制御することができることは理解されるべきである。たとえば無線RCU1148における電池障害の場合には、配線式RCU1150を使用して、電気機械式外科システム10と可撓性軸20に取り付けられた任意の外科用アタッチメント100との機能を制御することができる。
【0043】
先に説明したように、ハウジング14のフロントパネル15は表示装置16および表示器18a、18bを含む。表示装置16は、LCD表示装置など、英数字表示装置を含むことができる。表示装置16はまた、スピーカ、ブザーなど、音声出力装置を含むことができる。表示装置16は、可撓性軸20に取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムに従って、制御装置1122によって操作および制御される。外科用アタッチメントがそのように取り付けられていない場合、既定の動作プログラムまたはアルゴリズムが、制御装置1122によって読み込まれ、選択され、または制御装置1122に伝送され、それによって表示装置16の動作、ならびに電気機械式外科システム10のその他の特徴および機能が制御される。図1に示す外科用アタッチメント100が可撓性軸20に取り付けられている場合、先により詳細に説明したように、表示装置16は、たとえば、エンコーダ1106、1108の出力信号に従って測定された、アンビルアセンブリ112とステープルおよび刃の部分106との間の空隙を示すデータを表示することができる。
【0044】
同様に、表示器18a、18bは、可撓性軸20に取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムに従って、制御装置1122によって操作および制御される。表示器18a及び/又は表示器18bは、スピーカ、ブザーなどの音声出力装置、及び/又はLED、ランプ、ライトなどの視覚的表示器を包含してよい。図1に示す外科用アタッチメント100が可撓性軸20に取り付けられている場合、表示器18aは、たとえば、電気機械式外科システム10が電源オンの状態にあることを示すことができ、表示器18bは、たとえば、先により詳細に説明したように、アンビルアセンブリ112とステープルおよび刃の部分106との間の空隙が許容範囲内にあるかどうかを示すことができる。2つの表示器18a、18bのみについて説明したが、任意の個数の付加的な表示器を必要に応じて設けることができることは理解されるべきである。さらに、単一の表示装置16について説明したが、任意の個数の付加的な表示装置を必要に応じて設けることができることは理解されるべきである。
【0045】
無線RCU1150の表示装置16’および表示器18a’、18b’と、配線式RCU1148の表示装置16”および表示器18a”、18b”は、可撓性軸20に取り付けられた外科用アタッチメント100に対応する動作プログラムまたはアルゴリズムに従って、制御装置1322、1322’のそれぞれによって同様に操作および制御される。
【0046】
以下では、たとえば図1に示した外科用アタッチメント100について、本発明の様々な実施形態に従って説明する。
【0047】
図7(a)から7(f)は、本発明の一実施形態による外科用アタッチメント100の取手部102の様々な図である。たとえば、図7(a)はハウジング301を含む取手部102の正面斜視図であり、図7(b)はその取手部102の背面斜視図である。ハウジング301の近位端301aには、ギヤハウジング302が配設される。ハウジング301の遠位端301bには、継手ブロック305が配設される。ギヤハウジング302からは、クイックコネクト継手304および伸長ロッド308が延在する。
【0048】
クイックコネクト継手304はギヤハウジング302に装着されており、一組のばねを介するなどして付勢することができる。ギヤハウジング302は、第1の駆動ソケット304aおよび第2の駆動ソケット304bを含む。図7(c)は、取手部102の分解正面斜視図である。図7(c)に示すように、第1の駆動ソケット304aは第1の入力要素306aを含み、その入力要素306aの一方の端部3061はギヤハウジング302の開口部3021を介して延在し、その入力要素306aの他方の端部3062はスパーギヤ歯3063を含む。第2の駆動ソケット304bは第2の入力要素306bを含み、その入力要素306bの一方の端部3064はギヤハウジング302の第2の開口部3022を介して延在し、その入力要素306bの他方の端部3065はスパーギヤ歯3066を含む。
【0049】
伸長ロッド308は、ギヤハウジング302内の伸長ロッド開口部3025を介して延在する。伸長ロッド308の遠位端308bは、伸長ロッド開口部3025よりも大きいフランジ3081を有し、その結果、伸長ロッド308のフランジ3081はギヤハウジング302内に保持される。伸長ロッド308のフランジ3081はスパーギヤ310の一方の側面に当接し、スパーギヤ310はギヤハウジング302の内部窪み3023内に着座する。スパーギヤ310は、第1の入力要素306aのスパーギヤ歯3063に対応するスパーギヤ歯3101をその外周に沿って配置している。伸長ロッド308に対して同軸に配置された雄ねじロッド312が、スパーギヤ310の雌ねじ孔3102を介して延在している。ロッド312は、継手ブロック305の第1の開口部3052内に配置された継手要素314に結合されている。ロッド継手314は、可撓性軸104の第1の駆動軸104aに接続することができる。
【0050】
また、ギヤハウジング302の内部窪み3024内にはスパーギヤ318が着座している。スパーギヤ318は、第2の入力要素306bのスパーギヤ歯3066に対応するスパーギヤ歯3181をその外周に沿って配置している。スパーギヤ318は、スパーギヤ318を通って延在する孔3182を有する。スパーギヤ318の孔3182内には、軸駆動要素316の第1の端部3161が回転しないように係合される。軸駆動要素316の第2の端部3162は、可撓性軸104の第2の駆動軸104bと回転しないように係合するよう構成されており、可撓性軸104は継手ブロック305の遠位面3051内の第2の開口部3053を介して延在する。
【0051】
図7(d)は、図7(a)に示す取手部102の頂面図である。図7(e)は、図7(d)に示す線A−Aに沿う取手部102の側断面図である。図7(f)は、図7(d)に示す線B−Bに沿う取手部102の側断面図である。
【0052】
図8は、本発明の一実施形態による、外科用アタッチメント100の切断およびステープル留め用部品103の斜視図である。図8に示し、かつ先に説明したように、切断およびステープル留め用部品103はステープルおよび刃の部分106を含む。ステープルおよび刃の部分106の中心に配設された開口部を介して、トロカール軸108が軸方向に延在する。トロカール軸108は可撓性を備えることができる。一実施形態において、トロカール軸108はケーブルである。トロカール軸108の遠位端108aには、トロカール110が配設されている。トロカール110は、組織の区画を押進するよう構成された鋭利なまたは先細の端部を有している。さらに、トロカール110は、好ましくはトロカール110を着脱可能に固定するためのアンビルアセンブリのスロット内に挿入可能とすることによって、アンビルアセンブリ112と係合するように構成されており、このようにして、以下でより詳細に説明するように、トロカール110に取り付けられたトロカール軸108はアンビルアセンブリ112に着脱可能に固定されている。外科用アタッチメント100は、以下でより詳細に示すように、トロカール軸108とこのトロカール軸
108に取り付けられたアンビルアセンブリ112とを、ステープルおよび刃の部分106に対して、伸長させたり収縮させたりするなど選択的に移動させることができるように構成されている。具体的には、トロカール軸108は、その端部に配設されたトロカール110を有し、それぞれ遠位方向および近位方向など第1および第2の方向へ移動することによって、ステープルおよび刃の部分106に対して所望の距離を伸長可能かつ収縮可能である。
【0053】
図9は、本発明の一実施形態による切断およびステープル留め用部品103を示す斜視図である。図9は、組み立てられかつ部分的に閉じた位置にある切断およびステープル留め用部品103を示している。具体的には、図9は、ステープルおよび刃の部分106に対して部分的に収縮した位置にあるアンビルアセンブリ112を示している。
【0054】
図10(a)は、本発明の一実施形態によるアンビルアセンブリ112の構成要素を示す斜視図である。図10(a)は分解した状態にあるアンビルアセンブリ112を示している。図10(a)に示すように、アンビルアセンブリ112はアンビルエンドキャップ202を含む。アンビルエンドキャップ202は、軸方向に配置され、中心に配設された開口部2021を有する。アンビルエンドキャップ202はまた、エンドキャップ202の遠位側2025にある半径方向に配設されたスロット2022と、アンビルエンドキャップ202の近位側2026にある把持面2023とを含む。把持面2023は、刃収容部(bladerepository)2024を形成する窪み状部分を有する。把持面2023はまた、ステープルガイド2026を形成する。
【0055】
アンビルアセンブリ112はまた、アンビルエンドキャップ202のスロット2022に断面的に対応するピン204を含む。アンビルアセンブリ112はまた、中空アンビルスリーブ208を含む。アンビルスリープ208の遠位端2081は、アンビルエンドキャップ202の開口部2021に断面的に対応する。さらに、アンビルスリーブ208の遠位端2081は、アンビルピン204に断面的に対応する開口部2082を形成している。アンビルスリーブ208の近位端2084には、アンビルスリーブ208の周囲で円周方向に延在し、アンビルスリーブ208の最も近位側の端部に配置された、複数の半径方向に延在する歯部2087の半径を含む、アンビルスリーブ208のその他の部分の半径よりも小さい半径を有する溝2086が形成される。アンビルスリーブ208の近位端2084はまた、溝2086および歯2087を通って延在する、たとえば4つなど複数の軸方向スロット2088を形成し、それによってアンビルスリーブ208の近位端2084を半径方向に圧縮することを可能にする。アンビルスリーブ208はまた、長手方向に延在する1つまたは複数のキー2085をその外面に備えている。
【0056】
アンビルアセンブリ112はまた、アンビル伸長ロッド206を含む。アンビル伸長ロッド206は、扁平にすることができかつ開口部2062を形成する遠位端2061を有する。アンビル伸長ロッド206はまた、円形でありかつアンビルスリーブ208の溝2086の内径に断面的に対応する中央領域2063を有する。アンビル伸長ロッド206の遠位端2061は、アンビルスリーブ208の溝2086の内径よりも断面的に大きい。アンビル伸長ロッド206はまた、トロカール受容スロット2065を形成する近位端2063を有する。
【0057】
図10(b)は、本発明の一実施形態によるステープルおよび刃の部分106の構成要素の一部を示す斜視図である。図10(b)は分解した状態にある構成要素を示している。図10(b)に示すように、ステープルおよび刃の部分106は中空のアンビルスリーブガイド210を含む。アンビルスリーブガイド210の内部表面は1つまたは複数のキー溝2101を含む。アンビルスリーブガイド210の外部表面はリップ2102を含み、その結果、アンビルスリーブ案内部210の近位端2103は、アンビルスリーブガイ
ド210の遠位端2104よりも大きい半径を有する。
【0058】
また、ステープルおよび刃の部分106は外部ハウジングスリーブ212を含む。外部ハウジングスリーブ212は、その遠位端2122に1つまたは複数の開口部2121を有し、外部ハウジングスリーブ212の遠位端2124に半径方向内方に延在するリップ2123を有する。ステープルおよび刃の部分106はまた、ステープルカートリッジ214を含む。ステープルカートリッジ214は、ステープル2142がその中に格納される、軸方向に配設された複数のステープル受容スロット2141を形成する。図10(b)に示す実施形態において、ステープル受容スロット2141は、半径方向に離隔した2列でステープルカートリッジ214の周囲に円周方向に配設され、第1の列のステープル受容スロット2141は第2の列のステープル受容スロット2141の外側に位置する。ステープルカートリッジ214はまた、ステープルカートリッジ214の遠位端2147の近傍に配置された、半径方向内方に延在するリップ2145と、ステープルカートリッジ214の近位端2144の近傍に配設された、半径方向外方に延在するリップ2143とを含む。さらに、ステープルカートリッジ214の遠位端2147は把持面2146を形成する。
【0059】
また、ステープルおよび刃の部分106は脆性の刃保護リング216を備え、その内部にはスロット2161が形成されている。さらに、ステープルおよび刃の部分106は刃218を含む。刃218は、その遠位端2184に沿って円周方向に延在する切断へり2183を有する。さらに、刃218は、その近位端2182で半径方向内方に延在するタブまたはリップ2181を画定する。
【0060】
ステープルおよび刃の部106はまた、ステープルプッシャ220を含む。ステープルプッシャ220は軸方向に配設された複数の押歯2201を有し、その複数の押歯2201はそれぞれ、ステープラカートリッジ214のステープル受容スロット2141と対応するとともに整列する。ステープルプッシャ220はまた、その外部表面上にキー2202を含む。
【0061】
ステープルおよび刃の部分106はまた、首部2221およびフランジ部2222を有するステープルプッシャキャリッジ要素222を含み、その首部2221はフランジ部2222に対して遠位方向に軸方向へ延在する。首部2221の内側表面はねじ山2223を含み、首部2221の外側表面には円周方向に配設された溝部2224が形成されている。さらに、フランジ2222の半径方向の最外縁部はキー2225を含む。
【0062】
図10(c)は、本発明の一実施形態による、分解した状態のステープルおよび刃の部分106の残りの構成要素を示す斜視図である。図10(c)に示すように、ステープルおよび刃の部106はまたスプリットリング224を含む。スプリットリング224は一対の半円リング部2241および2242を含み、これらの半円リングを輪の形状に配置すると一対のキー溝2243および2244をこれら半円リングの間に形成する。ステープルおよび刃の部分106はまた、座金226を含む。ステープルおよび刃の部分106はまた、首部2281およびフランジ部2282を有するスラスト要素228を含み、その首部2281はフランジ部2282に対して遠位方向に軸方向へ延在する。首部2281の内側には孔部2283が画定される一方で、首部2281の外側表面は、ステープルプッシャキャリッジ要素222の首部2221の内側表面に配置されたねじ山2223に対応するねじ山2284が形成されている。スラスト要素228のフランジ2282は、その遠位方向に向いた表面内の1つまたは複数の孔部2285と、例えば円形の断面を有する近位方向に延在するピン2286とを含む。
【0063】
また、ステープルおよび刃の部分106は第1のスパーギヤ230を含む。第1のスパ
ーギヤ230には、スラスト要素228のピン2286に断面的に対応する内部孔2301が形成される。また、第1のスパーギヤ230は、円周方向に配設されたスパーギヤ歯2302を含む。また、ステープルおよび刃の部分106は座金232および内部ハウジングスリーブ234を含む。内部ハウジングスリーブ234は、内部ハウジングスリーブ234の遠位端2342に第1の内径を有する内部孔2341を含む。内部孔2341は、半径方向内方に延在するリップ2345に向かって近位側に延在し、このリップ2345の位置で内部孔2342の内径が縮径される。内部孔2342は、半径方向内方に延在する第2のリップ2346に向かって近位側にさらに延在し、このリップ2346の位置で内部孔2342の内径が再び縮径される。第2のリップ2346に向かって近位側には、内部ハウジングスリーブ234の内側表面に沿って円周方向に延在するギヤ歯2347がある。例えば、ギヤ歯2347に対して近位方向の近位端2343は、滑らかな内側表面を有し、その中に形成された1つまたは複数の半径方向の開口部2344を有する。
【0064】
ステープルおよび刃の部分106はまた、首部2361およびフランジ部2362を有するサンギヤ要素236を含み、この首部2361はフランジ部2362に対して遠位方向に軸方向へ延在する。首部2361の内側には孔部2363が画定される一方で、首部2361の外側表面は、第1のスパーギヤ230のギヤ歯2364に対応する、円周方向に配設されたギヤ歯2302を有する。フランジ部2362は、例えば円形の断面を有する近位方向に延在するピン2366を含む。ステープルおよび刃の部分106はまた、座金238を含む。
【0065】
また、ステープルおよび刃の部分106は内部孔2401を有する第1のプラネタリギヤ240を含む。第1のプラネタリギヤ240の外側表面は、円周方向に配設されたギヤ歯2402を有する。また、ステープルおよび刃の部分106は内部孔2421を有するサンギヤ242を含む。サンギヤ242の外側表面は、第1のプラネタリギヤ240のギヤ歯2402に対応する、円周方向に配設されたギヤ歯2422を有する。また、ステープルおよび刃の部分106はタブ2441を有する座金244を含む。また、ステープルおよび刃の部分106は内部孔2461を有する第2のプラネタリギヤ246を含む。第2のプラネタリギヤ246の外側表面は、サンギヤ242の円周方向に配設されたギヤ歯2422に対応する、円周方向に配設されたギヤ歯2462を有する。
【0066】
また、ステープルおよび刃の部分106は入力要素248を含む。入力要素248の遠位端2481は、例えば方形の断面を有することができる内部孔2483を有する。入力要素248の遠位端2481の外部表面には、第2のプラネタリギヤ246の外側表面上の円周方向に配設されたギヤ歯2462に対応する、円周方向に配設されたギヤ歯2482が設けられている。入力要素248の近位端2484は円形の外周を有し、内部孔2485を有する。
【0067】
また、ステープルおよび刃の部分106は、中心孔2501と、この中心孔2501に対して半径方向に偏移した第2の孔2502と、ピン2504が遠位方向にそこから延在する溝2503とを有するハウジングリアエンドキャップ250を含む。また、ハウジングリアエンドキャップ250は外径方向のリップ2505を含む。外径方向のリップ2505に対して遠位側には、円形の外周表面2507内に形成された少なくとも1つの開口部2506が配置されている。また、ハウジングリヤエンドキャップ250は、中心孔2501に通じる1つまたは複数のキー溝2509をその近位端に含む。
【0068】
また、ステープルおよび刃の部分106は中心リヤエンドキャップスリーブ252を含み、この中心リヤエンドキャップスリーブ252は、中心リヤエンドキャップスリーブ252を通って配設された孔2521を有する。中心リヤエンドキャップスリーブ252の遠位端2522において、孔2521は半径方向内方に延在するリム2523を形成する
。中心リヤエンドキャップスリーブ252の近位端2524には、対向して配設されたキー溝2525が設けられている。
【0069】
また、ステープルおよび刃の部分106は保持スリーブ254を含み、保持スリーブ254は、保持スリーブ254を通って配設された孔2541を有する。保持スリーブ254の近位端2542には、中心リヤエンドキャップスリーブ252の近位端2524に配置された、対向配置されたキー溝2525と、リヤハウジングエンドキャップ250のキー溝2509とに対応する、対向配置されたキー2543が設けられている。
【0070】
図11(a)は本発明の一実施形態による切断およびステープル留め用部品103を示す上断面図であり、図11(b)はその切断およびステープル留め用部品103を示す側断面図である。図11(a)および11(b)は、以下でより詳細に述べる、組み立てられかつ部分的に収縮した位置にある切断およびステープル留め用部品103を示している。図11(a)および11(b)に示すように、アンビルスリーブ208の遠位端2081は、アンビルエンドキャップ202内の、対応した、中心に配設された開口部2021に挿入される。アンビルピン204は、エンドキャップ202の半径方向に配設されたスロット2022を通じて挿入されると共に、アンビルスリーブ208の遠位端2081内の対向して配設された開口部2082を通じて挿入され、その結果、アンビルエンドキャップ202はアンビルエンドスリーブ208に対して軸方向にかつ回転可能に固定される。アンビル伸長ロッド206の遠位端2061は、アンビルスリーブ208の近位端2084において溝2086内に軸方向に保持される。アンビルスリーブ208は、アンビルスリーブガイド210の内側で軸方向に摺動可能に保持される。アンビルスリーブ208は、アンビルスリーブ208のキー2085がアンビルスリーブガイド210のキー溝2101内に係合することによって、アンビルスリーブガイド210に対して回転するのを防止される。
【0071】
中心リヤエンドキャップスリーブ252は、ハウジングリヤエンド250の中心開口部2501を通じて、アンビルスリーブガイド210の近位端2103内へ延在している。図示した位置において、中心リヤエンドキャップスリーブ252のリム2523は、アンビルスリーブ208の溝2086内に係合し、それによって中心エンドキャップスリーブ252とアンビルスリーブ208とを互いに軸方向に固定する。中心リヤエンドキャップスリーブ252の孔部2521内には、保持スリーブ254が挿入される。保持スリーブ254のキー2543は、保持スリーブ254と中心リヤエンドキャップスリーブ252とハウジングリヤエンドキャップ250との間の相対的な回転を防止するために、中心リヤエンドキャップスリーブ252のキー溝2525とハウジングリヤエンドキャップ250のキー溝2509とに係合する。
【0072】
入力要素248はハウジングリヤエンドキャップ250の第2の開口部2502内で回転可能に保持される。入力要素248の歯部2482は、第2のプラネタリギヤ246の円周方向に配設された歯部2462と噛合い係合し、この第2のプラネタリギヤ246は、ハウジングリヤエンドキャップ250の溝2503から遠位側に延在するピン2504に回転可能に取り付けられる。第2のプラネタリギヤ246の円周方向に配設された歯部2462はまた、サンギヤ242の円周方向に配設された歯部2422と噛合い係合する。サンギヤ242は、その内部孔2421を介してアンビルスリーブガイド210の近位端2103に回転可能に取り付けられる。
【0073】
また、サンギヤ242の円周方向に配設された歯部2422は、第1のプラネタリギヤ240の円周方向に配設された歯部2402と噛合い係合する。第1のプラネタリギヤ240は、サンギヤ要素236のフランジ部2362から近位側に延在するピン2361に回転可能に取り付けられる。また、第1のプラネタリギヤ240の円周方向に配設された
歯部2402は、内部ハウジングスリーブ234の内側表面の周囲で円周方向に延在するギヤ歯2347と噛合い係合する。内部ハウジングスリーブ234は、外部ハウジングスリーブ212、内部ハウジングスリーブ234およびハウジングリヤエンドキャップ250それぞれの位置合わせされた開口部2121、2344および2506に例えばピンまたはねじのような締結具を挿入することによって、ハウジングリヤエンドキャップ250および外部ハウジングスリーブ212に対して回転可能にかつ軸方向に固定される。
【0074】
サンギヤ要素236は、その内部孔2363を介してアンビルスリーブガイド210に回転可能に取り付けられる。サンギヤ要素236の首部2361の外側表面にある円周方向に配設されたギヤ歯2364は、第1のスパーギヤ230の円周方向に配設されたギヤ歯2302と噛合い係合する。第1のスパーギヤ230は、第1のスパーギヤ230の内部孔2301の中にスラスト要素228の近位方向に延在するピン2286を挿入することによって、スラスト要素228に回転可能に取り付けられる。また、第1のスパーギヤ230の円周方向に配設された歯部2302は、内部ハウジングスリーブ234の内側表面の周囲で円周方向に延在するギヤ歯2347と噛合い係合する。
【0075】
スラスト要素228は、アンビルスリーブガイド210がスラスト要素228の内部孔2283内に嵌合することによって、アンビルスリーブガイド210に回転可能に装着される。座金232は、スラスト要素282のフランジ2282の近位表面と内部ハウジングスリーブ234の第2のリップ2346との間に存在し、座金226は、スラスト要素282のフランジ2282の遠位表面とステープルカートリッジキャリヤ要素222のフランジ2222との間に存在する。
【0076】
ステープルプッシャキャリッジ要素222は、ステープルプッシャキャリッジ要素222の首部2221の内側表面に配置されたねじ山2223が、スラスト要素228の首部2281の外側表面に配置されたねじ山2284と螺合するように、スラスト要素228に装着される。ステープルプッシャキャリッジ要素222のキー2225は、スプリットリング224によって形成されたキー溝内に係合し、それによってステープルプッシャキャリッジ要素222をスプリットリング224に対して軸方向に摺動可能とすることができる。スプリットリングは、内部ハウジングスリーブ234の遠位端2342の孔2341内に配置される。
【0077】
ステープルプッシャ220は、スプリットリング224内に配置され、スラスト要素228のフランジ2282に当接する。ステープルプッシャ220のキー2202は、スプリットリング224によって形成されたキー溝2243内に係合し、それによってステープルプッシャ220をスプリットリング224に対して軸方向に摺動可能とすることができる。ステープルプッシャ220の押歯2201は、遠位方向に延在し、ステープルカートリッジ214のステープル受容スロット2141に位置を合わせる。。
【0078】
ステープルカートリッジ214はステープルプッシャ220に対して遠位側に配置され、外部ハウジングスリーブ212の内側に保持される。以下でより詳細に述べるように、ステープルカートリッジ214は、図11(a)および11(b)に示す位置からステープルカートリッジ214の半径方向外方に延在するリップ2143が、外部ハウジングスリーブ212の半径方向内方に延在するリップ2123に当接するまで、外部ハウジングスリーブ212内で遠位方向へ軸方向に移動可能である。
【0079】
ステープルプッシャ220とステープルプッシャキャリッジ要素222との間には、刃部218が配置される。刃部の遠位端2182に配置された、半径方向内方に延在するタブまたはリップ2185は、ステープルプッシャキャリッジ要素222の首部2221の外部表面に配置された溝2224内に係合する。刃部218の切断へり2183は、脆性
の刃保護リング216のスロット2161内に収容される。脆性の刃保護リング216は、ステープルカートリッジ214の半径方向内方に延在するリップ2144に軸方向に当接する。
【0080】
動作時には、外科用アタッチメント100は取手部102のクイックコネクト継手304を介して可撓性軸20に取り付けられ、その結果、可撓性軸20の第1の回転可能な駆動軸30は取手部102の第1の入力要素306aに、たとえば回転しないように結合され、可撓性軸20の第2の回転可能な駆動軸32は、取手部102の第2の入力要素306bに、たとえば回転しないように結合される。初期には、外科用アタッチメント100のトロカール軸108は、外科用アタッチメント100を患者の体内に容易に挿入することができるよう、図9に示すような収縮した位置とすることができる。たとえば、この位置では、ステープルおよび刃の部分106は患者の口部の通路内に挿入することができる。制御装置1122は初期には把持モードで動作するよう構成することができる。把持モードにおいて、第1の回転可能な駆動軸30が、例えば近位端から見て時計回りの第1の方向に回転すると、入力要素306aが第1の方向に回転する。第1の入力要素306aのギヤ歯3063がスパーギヤ310のスパーギヤ歯3101と噛合い係合することによって、スパーギヤ310は、近位端から見て例えば半時計回りの第2の方向に回転する。スパーギヤ310が第2の方向に回転すると、スパーギヤ310の雌ねじ孔3102内にそのねじ山が係合するロッド312はハウジング部102内で軸方向に移動する。ロッド312の端部の継手要素314は、可撓性軸104の第1の駆動軸104aとたとえば回転しないように係合し、次いでこの第1の駆動軸104aは、切断およびステープル留め用部品103のステープルおよび刃の部分106を通じて延在するトロカール軸108と、たとえば回転しないように係合する。このようにして、その端部に配設されたトロカール110を有するトロカール軸108は、例えば遠位方向の第1の方向に移動することによって、ステープルおよび刃の部分106に対して所望の距離だけ伸長することができる。トロカール110は、ステープル留めが望ましい組織の区画を通って押進され、アンビルロッド伸長ロッド206のトロカール受容スロット2065内に挿入され、アンビル伸長ロッド206に対して軸方向に固定される。トロカール軸108は次いで、第1の回転可能な駆動軸30を反対方向に操作することによって収縮され、アンビル伸長ロッド206とアンビルアセンブリ112のその他の構成要素とをアンビルスリーブガイド210内に引き込む。
【0081】
第1の回転可能な駆動軸30が引き続き例えば第2の方向に回転することによって、トロカール軸108がさらに収縮させられるとき、アンビルスリーブ208のキー2085はアンビルスリーブガイド210内のキー溝2101と係合し、それによってアンビルアセンブリ112がステープルおよび刃の部分106に位置合わせされる。トロカール軸108がさらに収縮すると、アンビルスリーブ108は、中心リヤエンドキャップスリーブ252のリム2523がアンビルスリーブ208の溝2086内に着座するまで、アンビルスリーブガイド210内で近位側に移動する。中心リヤエンドキャップスリーブ252のリム2523がアンビルスリーブ208の溝2086内に着座するとき、アンビルアセンブリ112はステープルおよび刃の部分106に対して所定の位置で軸方向に係止される。本発明の一実施形態によれば、アンビルアセンブリ112は、アンビルエンドキャップ202の把持面2023がステープルカートリッジ214の把持面2146から約5mmの距離にあるとき、ステープルおよび刃の部分106に対して所定の位置で軸方向に係止される。
【0082】
アンビルアセンブリ112がステープルおよび刃の部分106に対して所定位置に軸方向に係止されると、制御装置1122は第1の回転可能な駆動軸30が第2方向に回転するのを停止することができる。制御装置1122は次いで、操作の発射(firing)モードに移行することができる。操作の発射モードにおいては、第2の回転可能な駆動軸
32は例えば時計回りの第1の方向に回転することができ、それによって入力要素306bが第1の方向に回転する。入力要素306bのギヤ歯3066がスパーギヤ318のスパーギヤ歯3181と噛合い係合することによって、スパーギヤ318は、例えば反時計回りの第2の方向に回転する。スパーギヤ318が第2の方向に回転すると、軸駆動要素316と、軸駆動要素316に回転しないように結合された可撓性軸104の第2の駆動軸104bとが第2の方向に回転する。それによって可撓性軸104の第2の駆動軸104bが回転すると、それが回転しないように連結されたステープルおよび刃の部分106の入力要素248もまた第2の方向に回転する。したがって、入力要素248はハウジングリヤエンドキャップ250の第2の開口部2502内で回転する。入力要素248の歯部2482が第2のプラネタリギヤ246の円周方向に配設された歯部2462と噛合い係合することによって、入力要素248が第2の方向に回転すると、ピン2504上の第2のプラネタリギヤ246が第1の方向に回転する。さらに、第2のプラネタリギヤ246の円周方向に配設された歯部2462がサンギヤ242の円周方向に配設された歯部2422と噛合い係合することによって、第2のプラネタリギヤ246が第1の方向に回転すると、サンギヤ242がアンビルスリーブガイド210の近位端2103の周囲で第2の方向に回転する。
【0083】
サンギヤ242の円周方向に配設された歯部2422が第1のプラネタリギヤ240の円周方向に配設された歯部2402と噛合い係合することによって、サンギヤ242がアンビルスリーブガイド210の近位端2103の周囲で第2の方向に回転すると、サンギヤ要素236のフランジ部2362から近位側に延在するピン2361上の第1のプラネタリギヤ240が第1の方向に回転する。第1のプラネタリギヤ240の円周方向に配設された歯部2402が内部ハウジングスリーブ234のギヤ歯2347と噛合い係合することによって、および内部ハウジングスリーブ234がステープルおよび刃の部分106内に回転可能に固定されていることから、第1のプラネタリギヤ240が第1の方向に回転すると、第1のプラネタリギヤ240は内部ハウジングスリーブ234内で第2の方向に旋回(revolve)する。第1のプラネタリギヤ240は、サンギヤ要素236のフランジ部2362から近位側に延在するピン2361に装着されているため、第1のプラネタリギヤ240が第2の方向に旋回動作(revolvingmotion)すると、サンギヤ要素236はアンビルスリーブガイド210の周りを第2の方向に回転する。
【0084】
サンギヤ要素236の首部2361の外側表面上のギヤ歯2364が第1のスパーギヤ230のギヤ歯2302と噛合い係合することによって、サンギヤ236が第2の方向に回転すると、第1のスパーギヤ230が第1の方向に回転する。第1のスパーギヤ230の円周方向に配設されたギヤ歯2302が内部ハウジングスリーブ234のギヤ歯2347と噛合い係合することによって、および内部ハウジングスリーブ234がステープルおよび刃の部分106内に回転可能に固定されていることから、第1のスパーギヤ230が第1の方向に回転すると、第1のスパーギヤ230は内部ハウジングスリーブ234内で第2の方向に旋回する。さらに、第1のスパーギヤ230は、スラスト要素228のフランジ部2282から近位側に延在するピン2286に装着されているため、第1のスパーギヤ230が第2の方向に旋回動作すると、スラスト要素228はアンビルスリーブガイド210の周りを第2の方向に回転する。
【0085】
スラスト要素228がアンビルスリーブガイド210の周りを第2の方向に回転すると、ステープルプッシャキャリッジ要素222は、スラスト要素228の首部2281の外側表面に配置されたねじ山2284がステープルプッシャキャリッジ要素222の首部2221の内側表面に配置されたねじ山2223と螺合することによって、スラスト要素228に対して移動する。ステープルプッシャキャリッジ要素222のキー2225は、スプリットリング224によって形成されたキー溝内に係合するため、ステープルプッシャキャリッジ要素222はスプリットリング224内で遠位方向へ軸方向に摺動する。ステ
ープルプッシャキャリッジ要素222が遠位側に移動すると、ステープルプッシャ220もまた、スラスト要素228のフランジ2282がステープルプッシャ220と当接することにより、遠位方向に移動する。
【0086】
ステープルプッシャ220が遠位方向に移動すると、刃部218はステープルプッシャ220に沿って遠位方向に移動する。脆性の刃保護リング216のスロット2161内に収容された刃部218の切断へり2183によって、脆性の刃保護リング216は遠位側に移動する。脆性の刃保護リング216はステープルカートリッジ214の内方のリップ2144に軸方向に当接するため、脆性の刃保護リング216が遠位側に移動すると、ステープルカートリッジ214も遠位側に移動する。したがって、この動作の段階では、ステープルプッシャ220、刃部218、脆性の刃保護リング216およびステープルカートリッジ214は共に遠位側に移動する。ステープルカートリッジ214は、アンビルエンドキャップ202の把持面2023とステープルカートリッジ214の把持面2146との間で組織の区画(図示せず)をさらに把持するよう遠位側に移動する。組織の区画の厚さに応じて、ステープルカートリッジ214は、ステープルカートリッジ214のリップ2143が外部ハウジングスリーブ212の半径方向内方に延在するリップ2123に当接するまで、さらに遠位方向に移動することができる。
【0087】
ステープルカートリッジ214が遠位側に十分に移動して組織の区画を完全に把持すると、引き続き第2の回転可能な駆動軸32が回転することによって、ステープルプッシャ220、脆性の刃保護リング216および刃部218がさらに遠位側に移動する。脆性の刃保護リング216およびステープルカートリッジ214が、圧縮された組織の区画に接触することによって、さらに遠位方向へ移動することを妨げられた後も、ステープルプッシャ220および刃部218はこれらの構成要素に対して引き続き遠位方向に移動させられる。具体的には、刃部218がさらに遠位側に移動すると、刃部218の切断へり2183は脆性の刃保護リング216を貫通し、それによって把持されている組織の区画を切断する。これらの構成要素は、刃部218の切断へり2183が脆性の刃保護リング216を貫通し、それによって組織の区画を切断するよう約70ポンド以上の圧力が用いられ、それによって組織の区画が切断前に十分に把持されるように構成すると有利である。同時に、ステープルプッシャ220がさらに遠位側に移動すると、ステープルカートリッジ214のステープル受容スロット2141に位置合わせされたステープルプッシャ220の押歯2201は、ステープル受容スロット2141を通じて遠位側に移動し始める。このことによって、ステープルカートリッジ214のステープル受容スロット2141内に保持されたステープル2142は、ステープル2142が閉じられるまでの間、把持された組織の区画を押し進み、、アンビルエンドキャップ202の把持面2023のステープルガイド2026内に押し込まれる。
【0088】
ステープル2142が完全に閉じられると、組織の区画に対する把持力は第2の駆動軸32が反対の方向に回転することによって軽減することができる。通常、第2の駆動軸32が反対方向に回転するとき、スラスト要素228もまた、ステープルおよび刃の部分106の構成要素が逆方向に移動することによって、上述の方向とは逆の方向に回転させられ、それによってステープルプッシャキャリッジ要素222は、例えば近位側に移動して、収縮させられる。また刃部218は、刃部218のリップ2181がステープルプッシャキャリッジ要素222の首部2221の外部表面に配置された溝2224内に係合することによって、例えば近位側に移動して、収縮させられる。アンビルスリーブ202の把持面2023とステープルカートリッジ214の把持面2146との間の把持力が十分に減じられると、切断されステープル留めされた組織の区画が、アンビルエンドキャップ202の把持面2023とステープルカートリッジ214の把持面2146との間から除去され、外科用アタッチメント100を患者の体内から除去することができる。
【0089】
図12(a)から12(c)は、本発明の他の実施形態による切断およびステープル留め用部品の一部の構成要素を示している。具体的には、図12(a)は、ステープルおよび刃の部分4106を含む切断およびステープル留め要素4103の斜視図である。ステープルおよび刃の部分4106の中心に配設された開口部を通じて例えばケーブルのような可撓性のトロカール軸4108が軸方向に延在している。可撓性のトロカール軸4108の遠位端4108aには、トロカール受容スロット4065を形成するケーブル伸長要素4206が配設されている。トロカール受容スロット4065は、その近位端に広い部分4066、その遠位端に狭い部分4067を有する。
【0090】
また、切断およびステープル留め用部品4103はアンビルアセンブリ4112を含む。アンビルアセンブリ4112はアンビルエンドキャップ4202を含む。アンビルエンドキャップ4202は、アンビルエンドキャップ4202から近位側に延在するアンビルスリーブ4208を有する。アンビルスリーブ4208の最も近位方向の端部からは可撓ケーブル4212が延在しており、この可撓ケーブル4212は、この可撓ケーブル4212に取り付けられたトロカール4220を有している。トロカール4220は、例えば球面状の第1の部分4213を含み、円筒形のフィンガ4214がこの第1の部分4213から延在している。円筒形のフィンガ4214はトロカールチップ4215に向かって先細状とされている。
【0091】
図12(b)は、ケーブル伸長要素4206の付加的な特徴を示す側断面図である。具体的には、ケーブル伸長要素4206は軸方向に延在する中心孔4207を形成し、トロカール受容スロット4065の狭い部分4067と広い部分4066はその中心孔4207に連通している。中心孔4207内、かつトロカール受容スロット4065に対して近位方向には、ばねなどの付勢要素4250によって遠位方向に付勢されたプランジャ4251が配置されている。図12(b)に示すように、トロカールチップ4215は、トロカール4220の例えば球面状の第1の部分4213がトロカール受容スロット4065の狭い部分4067に対して近位方向に配置されるように、付勢されたプランジャ4251を押圧しかつ変位させるよう構成されている。
【0092】
図12(c)に示すように、例えば球面状のトロカール4220の第1の部分4213がトロカール受容スロット4065の狭い部分4067に対して近位側に配置されると、トロカール4220がトロカール受容スロット4065を通じ、中心孔4207内に下降する。次いでプランジャ4251が、トロカール4220の第1の部分4213を中心孔4207の広い部分4258と狭い部分4259との境界に着座させるように、付勢要素4250によって遠位方向に付勢される。中心孔4207の狭い部分4259は、トロカール軸4108がステープルおよび刃の部分4106に対して収縮させられたときにアンビルアセンブリ4112も収縮させられるように、トロカール4220を保持する。
【0093】
切断およびステープル留め用部品4103のこの実施形態では、トロカール軸4108をアンビルアセンブリ4112に結合することを容易にする配置が可能になる。具体的には、アンビルアセンブリ4112の可撓ケーブル4212および可撓性のトロカール軸4108によって、アンビルアセンブリ4112は可撓性のトロカール軸4108により容易に結合することが可能になる。たとえば、この配置では、アンビルアセンブリ4112は、そのような結合の前にアンビルアセンブリ4112を可撓性のトロカール軸4108と位置合わせすることを必要とせずに、及び/又はそのような結合の前にアンビルアセンブリ4112および可撓性のトロカール軸4108がその中に配置される組織リムを位置合わせすることを必要として、可撓性のトロカール軸4108に結合することが可能になる。さらに、この配置では高い引張り荷重に対応することができ、したがって切断されかつステープル留めされた組織の区画を、通常の外科装置で可能となるよりも高い把持力で把持することが可能になる。図12(a)から12(c)に示す実施形態は、アンビルア
センブリ4112に取り付けられたトロカール4220とトロカール軸4108に取り付けられたケーブル伸長要素4206とを有するが、他の実施形態においては、トロカール4220はトロカール軸4108に取り付けることができ、ケーブル伸長要素4206はアンビルアセンブリ4112に取り付けることができることは理解されるべきである。
【0094】
図13(a)から13(c)は、本発明の他の実施形態による取手部を示している。具体的には、図13(a)はハウジング5301を含む取手部5102の正面斜視図であり、図13(b)はその取手部5102の背面斜視図である。ハウジング5301の近位端5301aには、ギヤハウジング5302が配設される。ハウジング5301の遠位端5301bには、挿入チューブ5305が延在する。ギヤハウジング5302からは、クイックコネクト継手5304およびチューブ5308が延在している。
【0095】
クイックコネクト継手5304はギヤハウジング5302の上に装着されており、例えば一組のばねを介するなどして付勢することができる。ギヤハウジング5302は、第1の駆動ソケット5304aおよび第2の駆動ソケット5304bを含む。図13(c)は、取手部5102の分解正面斜視図である。図13(c)に示すように、ギヤハウジング5302は、残りのギヤ要素を相対的位置に保持するように、ギヤ保持プレート5401と結合する。第1の駆動ソケット5304aは第1の入力要素5306aを含み、その入力要素5306aの一方の端部5061はギヤハウジング5302の開口部5021を通って延在する。第1のスパーギヤ5310は、内部孔5101と円周方向に配設されたスパーギヤ歯5102とを有する。第1の入力要素5306aの第2の端部5062は、第1のスパーギヤ5310の内部孔5101を通じて、たとえば回転しないように延在する。第1のスパーギヤ5310の歯部5102は、雌ねじが設けられ、軸方向に延在する孔部5411を有するギヤナット5410と係合し、その孔部5411内には可撓性軸104の第1の駆動軸104aを螺合によって挿入することができる。ギヤナット5410はギヤベアリング5412の窪み5413内に着座する。ギヤベアリング5412はギヤハウジング5302の窪み5023内に着座する。ギヤベアリング5412の首部5415は内部孔5416を有し、ギヤハウジング5302の開口部5417を通じて近位側に延在する。
【0096】
第2の駆動ソケット5304bは第2の入力要素5306bを含み、その入力要素5306bの一方の端部5064はギヤハウジング5302の第2の開口部5022を通じて延在し、その入力要素5306bの他方の端部5065はスパーギヤ歯5066を含む。また、ギヤハウジング5302の内部窪み5024にはスパーギヤ5318が着座する。スパーギヤ5318は、第2の入力要素5306bのスパーギヤ歯5066に対応するスパーギヤ歯5181をその外周に沿って配置している。スパーギヤ5318はスパーギヤ5318を貫通して延在する孔部5182を有する。スパーギヤ5318の孔部5182内には、軸駆動要素5316の第1の端部5161が回転しないように係合する。軸駆動要素5316の第2の端部5162は、可撓性軸104の第2の駆動軸104bと回転しないように係合するよう構成されており、この第2の駆動軸104bは挿入チューブ5305を通じて軸駆動要素5316の第2の端部5162へ延在する。
【0097】
動作時には、取手部5102はクイックコネクト継手5304を介して可撓性軸20に取り付けられ、その結果、可撓性軸20の第1の回転可能な駆動軸30は取手部5102の第1の入力要素5306aに例えば回転しないように結合され、可撓性軸20の第2の回転可能な駆動軸32は、取手部5102の第2の入力要素5306bに例えば回転しないように結合される。把持モードにおいては、第1の回転可能な駆動軸30が例えば時計回りの第1の方向に回転すると、入力要素5306aは第1の方向に回転する。第1の入力要素5306aのギヤ歯5063がスパーギヤ5310のスパーギヤ歯5101と噛合い係合することによって、スパーギヤ5310は例えば反時計回りの第2の方向に回転す
る。スパーギヤ5310が第2の方向に回転すると、ギヤナット5410が第1の方向に回転する。可撓性軸104の第1の駆動軸104aがスパーギヤ5310の内部孔5101と螺合することによって、可撓性軸104の第1の駆動軸104aが、およびそれに伴って、第1の駆動軸104aが取り付けられたトロカール軸108が軸方向に移動する。このようにして、トロカール軸108は、ステープルおよび刃の部分106に対して例えば遠位方向の第1の方向に所望の距離だけ延在することができる。トロカール110がアンビル伸長ロッド206のトロカール受容スロット2065内に挿入されると、トロカール軸108は次いで、第1の回転可能な駆動軸30を反対方向に操作することによって収縮させることができる。
【0098】
操作の発射モードにおいては、第2の回転可能な駆動軸32は、入力要素5306bを第1の方向に回転させるために、例えば時計回りの第1の方向に回転することができる。入力要素5306bのギヤ歯5066がスパーギヤ5318のスパーギヤ歯5181と噛合い係合することによって、スパーギヤ5318は例えば反時計回りの第2の方向に回転する。スパーギヤ5318が第2の方向に回転すると、軸駆動要素5316と、この軸駆動要素5316に回転しないように結合された可撓性軸104の第2の駆動軸104bとが第2の方向に回転する。それによって可撓性軸104の第2の駆動軸104bが回転すると、第2の駆動軸104bが回転しないように連結されたステープルおよび刃の部分106の入力要素248もまた第2の方向に回転する。このようにして、ステープルおよび刃の部分106のステープルカートリッジ214は、その間に配置された組織の区画を把持するようにアンビルアセンブリ112に対して移動することができ、その組織を、前述により詳細に述べたように、切断しステープル留めすることができる。
【0099】
図14(a)から14(d)および図15(a)から15(d)は、本発明の他の実施形態による切断およびステープル留め用部品を示している。具体的には、図14(a)は、組み立てられかつ部分的に閉じられた位置にある切断およびステープル留め用部品603を示す正面斜視図であり、図14(b)はその背面斜視図である。図14(c)は、同じ位置および状態にある切断およびステープル留め用部品603を示す側面図であり、図14(d)はその背面図である。図示のように、切断およびステープル留め用部品603はアンビルアセンブリ612とステープルおよび刃の部分606とを含む。
【0100】
図15(a)は、アンビルアセンブリ612の構成要素を示す分解正面図である。アンビルアセンブリ612は、アンビルエンドキャップ602を含む。アンビルエンドキャップ602は、軸方向に配置され、中央に配設された開口部6021を有する。また、アンビルエンドキャップ602は、エンドキャップ602の遠位側部6025に半径方向に配設されたスロット6022と、アンビルエンドキャップ602の近位側部6026に把持面6023とを含む。把持面6023は刃収容部6024を形成する溝状部分を有しており、その目的については以下でさらに詳細に述べる。また、把持面6023はステープルガイド6027を形成する。
【0101】
また、アンビルアセンブリ612は、アンビルエンドキャップ602のスロット6022に断面的に対応するピン604を含む。また、アンビルアセンブリ612は中空アンビルスリーブ608を含む。アンビルスリープ608の遠位端6083は、アンビルエンドキャップ602の開口部6021に断面的に対応する。さらに、アンビルスリーブ608の遠位端6083は、アンビルピン604に断面的に対応する開口部6082を形成する。アンビルスリーブ608の近位端6084には、アンビルスリーブ608の周囲で円周方向に延在すると共に、アンビルスリーブ608の最も近位側の端部に配置された、半径方向に配設された複数の歯部6087の半径を含めて、アンビルスリーブ608のその他の部分の半径よりも小さい半径を有する凹部6086が形成されている。また、アンビルスリーブ608の近位端6084は凹部6086および歯6087を通じて延在する、た
とえば4つの、複数の軸方向スロット6088を形成し、それによってアンビルスリーブ608の近位端6084を半径方向に圧縮することが可能になる。また、アンビルスリーブ608は、1つまたは複数の軸方向に配設されたキー6085をその外部表面に含む。
【0102】
また、アンビルアセンブリ612はアンビル伸長ロッド606を含む。アンビル伸長ロッド606は、扁平にすることができるとともに、開口部6062を形成する遠位端6061を有する。また、アンビル伸長ロッド606は、円形であるとともにアンビルスリーブ608の凹部6086の内径に断面的に対応する中央領域6063を有する。アンビル伸長ロッド606の遠位端6061は、アンビルスリーブ608の凹部6086の内径よりも断面的に大きい。また、アンビル伸長ロッド606はトロカール受容スロット6065を形成する近位端6063を有する。
【0103】
図15(b)は、本発明の一実施形態によるステープルおよび刃の部分606の構成要素の一部を示す分解斜視図である。図15(b)に示すように、ステープルおよび刃の部分606は中空のアンビルスリーブガイド610を含む。アンビルスリーブガイド610の内部表面は1つまたは複数のキー溝6101を含む。アンビルスリーブガイド610の外部表面はリップ6102を含み、その結果、アンビルスリーブガイド610の近位端6103は、アンビルスリーブガイド610の遠位端6104よりも大きい半径を有する。
【0104】
また、ステープルおよび刃の部分606は外部ハウジングスリーブ612を含む。外部ハウジングスリーブ612は、その近位端6122に1つまたは複数の開口部6121を有し、外部ハウジングスリーブ612の遠位端6124に半径方向内方に延在するリップ6123を有する。また、ステープルおよび刃の部分606はステープルカートリッジ614を含む。ステープルカートリッジ614は軸方向に配設された複数のステープル受容スロット6141を形成し、ステープル6142がステープル受容スロット6141の中に格納される。図15(b)に示す実施形態において、ステープル受容スロット6141は、半径方向に離隔した2列の形態でステープルカートリッジ614の周りに円周方向に配設され、第1の列のステープル受容スロット6141は第2の列のステープル受容スロット6141の外側に位置する。また、ステープルカートリッジ614は、半径方向内方に延在するリップ6145と、ステープルカートリッジ614の近位端6144の近傍に配置された、半径方向外方に延在するリップ6143とを含む。さらに、ステープルカートリッジ614の遠位端6147は把持面6146を形成する。
【0105】
また、ステープルおよび刃の部分606は脆性の刃保護リング616およびカートリッジプッシャ要素617を含む。カートリッジプッシャ要素617は、半径方向外方に延在するリブ6171をその遠位端に有する。さらに、ステープルおよび刃の部分106は刃部618を含む。刃部618は、その遠位端に沿って円周方向に延在する切断へり6183を有する。さらに、刃部618は、半径方向内方に延在するタブまたはリップ6181をその近位端に形成する。
【0106】
また、ステープルおよび刃の部分606はステープルプッシャ620を含む。ステープルプッシャ620は軸方向に配設された複数の押歯6201を有し、その複数の押歯6201それぞれは、ステープラカートリッジ614のステープル受容スロット6141と対応しかつ位置合わせされている。また、ステープルプッシャ620はその外部表面上にキー6202を含む。
【0107】
また、ステープルおよび刃の部分606は、首部6221およびフランジ部6222を有するステープルプッシャキャリッジ要素622を含み、その首部6221はフランジ部6222に対して遠位方向へ軸方向に延在する。首部6221の内側表面はねじ山6223を含み、首部6221の外側表面は円周方向に配設された溝6224を形成する。さら
に、フランジ部6222の半径方向最外縁部にはキー6225を含む。
【0108】
図15(c)は、本発明の一実施形態による、分解した状態のステープルおよび刃の部分606の残りの構成要素を示す斜視図である。図15(c)に示すように、ステープルおよび刃の部分606はまたスプリットリング624を含む。スプリットリング624は、環状に配置すると一対のキー溝6243および6244をその間に形成する、一対の半円リング部6241および6242を含む。また、ステープルおよび刃の部分606は座金626を含む。また、ステープルおよび刃の部分606は、首部6281およびフランジ部6282を有するスラスト要素628を含み、その首部6281はフランジ部6282に対して遠位方向へ軸方向に延在する。首部6281の内側には孔部6283が形成される一方で、首部6281の外側表面は、ステープルプッシャキャリッジ要素622の首部6221の内側表面に配置されたねじ山6223に対応するねじ山6284を形成する。スラスト要素628のフランジ部6282は、その遠位側に向いた表面内の1つまたは複数の孔部6285と、例えば円形の断面を有する近位側に延在する3つのピン6286を含む。
【0109】
ステープルおよび刃の部分606は、第1のスパーギヤ630a、第2のスパーギヤ630bおよび第3のスパーギヤ630cを含む。第1、第2および第3のスパーギヤ630a、630b、630cは、スラスト要素628のピン6286に断面的に対応する内部孔6301を形成している。また、第1、第2および第3のスパーギヤ630a、630b、630cのそれぞれは、円周方向に配設されたスパーギヤ歯6302を含む。
【0110】
また、ステープルおよび刃の部分606は座金632および内部ハウジングスリーブ634を含む。内部ハウジングスリーブ634は、内部ハウジングスリーブ634の遠位端に第1の内径を有する内部孔6341を含む。内部孔6341は、半径方向内方に延在するリップ6345に向かって近位側に延在し、このリップ6345の位置で内部孔6341の内径が縮径する。内部孔6341は、半径方向内方に延在する第2のリップ6346に向かってさらに近位側に延在し、このリップ6346の位置で内部孔6341の内径が再び縮径される。第2のリップ6346に向かって近位側には、内部ハウジングスリーブ634の内側表面に沿って円周方向に延在するギヤ歯6347がある。たとえばギヤ歯6347に対して近位側の近位端6347は、滑らかな内側表面を有し、その中に画定された1つまたは複数の半径方向の開口部6344を有する。
【0111】
また、ステープルおよび刃の部分606は首部6361およびフランジ部6362を有するサンギヤ要素636を含み、その首部6361はフランジ部6362に対して遠位方向へ軸方向に延在する。首部6361の内側には孔部6363が形成される一方で、首部6361の外側表面は、第1のスパーギヤ630のギヤ歯6302に対応する、円周方向に配設されたギヤ歯6364を有する。フランジ部6362は、例えば円形の断面を有する近位方向に延在する3つのピン6366を含む。また、ステープルおよび刃の部分606は座金638を含む。
【0112】
また、ステープルおよび刃の部606は、第1のプラネタリギヤ640a、第2のプラネタリギヤ640bおよび第3のプラネタリギヤ640cを含む。第1、第2および第3のプラネタリギヤ640a、640b、640cのそれぞれは、スラスト要素636のピン6366に断面的に対応する内部孔6401を形成する。また、第1、第2および第3のプラネタリギヤ640a、640b、640cのそれぞれは、円周方向に配設されたギヤ歯6402を含む。
【0113】
また、ステープルおよび刃の部分606は、内部孔6421を有するサンギヤ642を含む。サンギヤ642の外側表面は、第1、第2および第3のプラネタリギヤ640a、
640bおよび640cのギヤ歯6402に対応する、円周方向に配設されたギヤ歯6422を有する。また、ステープルおよび刃の部分606は、内部孔6461を有する第2のプラネタリギヤ646を含む。第2のプラネタリギヤ646の外側表面は、サンギヤ642の円周方向に配設されたギヤ歯6422に対応する、円周方向に配設されたギヤ歯6462を有する。
【0114】
また、ステープルおよび刃の部分606は入力要素648を含み、その入力要素648の遠位端6481は内部孔6483を有し、ギヤ要素6481が回転しないように、たとえば方形の断面を介してこの内部孔6483に挿入される。ギヤ要素6481の外部表面には、第2のプラネタリギヤ646の外側表面上にある円周方向に配設されたギヤ歯6462に対応する、円周方向に配設されたギヤ歯6482がある。入力要素648の近位端は円形状の外周を有し、内部孔6485を有する。
【0115】
また、ステープルおよび刃の部606は、中心孔6501と、中心孔6501に対して半径方向に偏心した第2の孔部6502と、凹部6503とを有するハウジングリヤエンドキャップ650を含み、ピン6504が凹部6503から遠位方向に延在している。また、ハウジングリヤエンドキャップ650は外径方向のリップ6505を含む。外径方向のリップ6505に対して遠位側には、円形状の外周表面6507内に形成された少なくとも1つの開口部6506が設けられる。また、ハウジングリヤエンドキャップ650は、中心孔6501と連通する半径方向の孔6509をその近位端に含む。
【0116】
また、ステープルおよび刃の部分606は中心リヤエンドキャップスリーブ652を含み、この中心リヤエンドキャップスリーブ652は、中心リヤエンドキャップスリーブ652を貫通して延在する軸方向の孔部6521を有する。さらに、中心リヤエンドキャップスリーブ652は、中心リヤエンドキャップスリーブ652を通じて延在する半径方向の孔6252を有する。また、ステープルおよび刃の部分606は、ハウジングリヤエンドキャップ650の半径方向の開口部6509を通じて挿入されるように寸法および形状が定められたピン停止具655を含む。ピン停止具655はまた、挿入チューブ658の半径方向の開口部659を通じて挿入されるよう寸法および形状が定められている。ピン停止具655が、ハウジングリヤエンドキャップ650の半径方向の開口部6509と挿入チューブ658の半径方向の開口部659とを通じてこれらに同時に挿入されると、ハウジングリヤエンドキャップ650および挿入チューブ658は互いに所定の位置に固定される。挿入チューブ658は、図7(a)から7(f)に示す取手部102または図13(a)から13(c)に示す取手部5102などの取手部を、図9から11(b)に示すステープルおよび刃の部分106または図15(a)から15(c)に示すステープルおよび刃の部分606などのステープルおよび刃の部分に結合するために用いられる。挿入チューブ658は、組織適合可能で滅菌可能なエラストマー材料で形成すると有利である。好ましくは、挿入チューブ658はオートクレーブ滅菌可能な材料で形成することができる。さらに、挿入チューブ658は、高度なまたは比較的高度な潤滑性を有する材料で形成することができる。たとえば、挿入チューブ658は、テフロン(登録商標)(すなわち、ポリテトラフルオロエチレン(PTFE)などのフルオロポリマー)、シリコーン樹脂、たとえばSIL−KORE(登録商標)(W.L.Gore&Associates社製)、などのテフロン(登録商標)/シリコーンの組合せ、伸展テフロン(登録商標)などの「EPTFE」等の材料で形成することができる。利用することができるその他の適切な材料については、本出願人による同時係属中の、2002年3月15日に出願された特許文献15でさらに詳細に記載されており、この特許文献15は先に述べたようにその全体が参照により本明細書に明らかに組み込まれる。
【0117】
図15(d)は、組み立てられた状態にあるステープルおよび刃の部分606の構成要素の一部を示す側断面図である。図15(d)に示されていないステープルおよび刃の部
分606の構成要素は、通常図11(a)および11(b)に示すステープルおよび刃の部分の配置と類似した方式で配置される。図15(d)を参照すると、スラスト要素628(ここでは簡潔にするため部分的に図示する)が、アンビルスリーブガイド610(図示せず)に回転可能に装着されている。ステープルプッシャキャリッジ要素622は、ステープルプッシャキャリッジ要素622の首部6221の内側表面に配置されたねじ山6223が、スラスト要素628の首部6281の外側表面に配置されたねじ山6284と螺合するように、スラスト要素628に装着される。ステープルプッシャキャリッジ要素622は、外部ハウジングスリーブ612内で軸方向に摺動可能である。
【0118】
ステープルプッシャキャリッジ要素622のフランジ6222には、ステープルプッシャ620が当接している。ステープルプッシャ620は、外部ハウジングスリーブ612内で軸方向に摺動可能である。ステープルプッシャ620の押歯6201は、遠位側に延在し、ステープルカートリッジ614のステープル受容スロット6141と位置合わせされている。
【0119】
ステープルカートリッジ614はステープルプッシャ620に対して遠位側に配置され、外部ハウジングスリーブ612の内側に保持される。ステープルカートリッジ614は、ステープルカートリッジ614の半径方向外方に延在するリップ6143が、外部ハウジングスリーブ612の半径方向内方に延在するリップ6123に当接するまで、図14に示す位置から外部ハウジングスリーブ612内で遠位方向へ軸方向に移動可能である。
【0120】
ステープルプッシャ620とステープルプッシャキャリッジ要素622との間には、刃部618が配置される。刃部の遠位端に配置された、半径方向内方に延在するタブまたはリップ6185は、ステープルプッシャキャリッジ要素622の首部6221の外部表面に配置された凹部6224内に係合する。刃部618の切断へり6183は、脆性の刃保護リング616内に収容される。脆性の刃保護リング616の近位端は、ステープルカートリッジ614の半径方向内方に延在するリップ6144に当接する。
【0121】
ステープルカートリッジプッシャ617は、ステープルカートリッジプッシャ617の近位端がステープルプッシャ620に当接するように、刃部618に沿って配置される。ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、ステープルカートリッジ614の半径方向内方に延在するリップ6145に当接する。ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171が、最初は、ステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部表面との間の距離よりも大きくなるように、寸法および形状が定められている。
【0122】
動作時には、ステープルおよび刃の部分606の、図15(d)に示されていない構成要素は通常、上述により詳細に述べたように、ステープルおよび刃の部分106の、図11(a)および11(b)に示された構成要素の動作と類似した方式で動作する。図15(d)を参照すると、スラスト要素628は、たとえば使用者が可撓性軸20の第1の回転可能な駆動軸30を例えば第2の方向に操作することによって、アンビルスリーブガイド610の周りを回転する。
【0123】
スラスト要素628がアンビルスリーブガイド610の周りを第2の方向に回転すると、ステーププッシャキャリッジ要素622は、スラスト要素628の首部6281の外側表面に配置されたねじ山6284がステープルプッシャキャリッジ要素622の首部6221の内側表面に配置されたねじ山6223と螺合することによって、スラスト要素628に対して移動する。ステープルプッシャキャリッジ要素622のキー6225は、スプリットリング624によって形成されたキー溝6243内に係合するため、ステープルプ
ッシャキャリッジ要素622はスプリットリング624内で遠位方向へ軸方向に摺動する。ステープルプッシャキャリッジ要素622が遠位方向に移動すると、ステープルプッシャ620もまた、スラスト要素628のフランジ6282がステープルプッシャ620と当接することにより、遠位方向に移動する。
【0124】
ステープルプッシャ620が遠位方向に移動すると、刃部618と、刃部618の切断へり6183を覆う脆性の刃保護リング616とがまた、ステープルプッシャ620と共に遠位方向に移動する。さらに、ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、最初はステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部表面との距離よりも大きいため、ステープルプッシャ620が遠位方向に移動すると、ステープルカートリッジ614もまたステープルプッシャ620と共に遠位方向に移動する。したがって、動作のこの段階では、ステープルプッシャ620、刃部618、脆性の刃保護リング616、カートリッジプッシャ要素617およびステープルカートリッジ614は共に遠位側に移動する。ステープルカートリッジ614は、アンビルエンドキャップ602の把持面6023とステープルカートリッジ614の把持面6146との間で組織の区画(図示せず)を把持するように遠位側に移動する。組織の区画の厚さに応じて、ステープルカートリッジ614は、ステープルカートリッジ614の半径方向外方に延在するリップ6143が外部ハウジングスリーブ612の半径方向内方に延在するリップ6123に当接するまで、遠位側に移動することができる。
【0125】
ステープルカートリッジ614が遠位側に十分に移動して組織の区画を把持すると、脆性の刃保護リング616およびステープルカートリッジ614は、圧縮された組織の区画と接触することによって、遠位方向にさらに移動することを妨げられる。引き続き第2の回転可能な駆動軸32が動作した結果、たとえば約70ポンドまたはそれ以上の圧力が把持された組織の区画に作用する際、ステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171は、ステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部表面との間で押され、それによってこれらの構成要素間の締りばめを解除する(overcoming)。この時点で、ステープルカートリッジ614は遠位側には移動しないが、その代わりにステープルプッシャ620および刃部618がステープルカートリッジ614に対して遠位側に引き続き移動する。このように刃部618が引き続き遠位側に移動すると、刃部618の切断へり6183は脆性の刃保護リング616を貫通し、それによって把持されている組織の区画を切断する。同時に、ステープルプッシャ620がさらに遠位側に移動すると、ステープルカートリッジ614のステープル受容スロット6141と位置合わせされたステープルプッシャ620の押歯6201は、ステープル受容スロット6141を通じて遠位側に移動し始める。このことによって、ステープルカートリッジ614のステープル受容スロット6141内に保持されたステープル6142は、ステープル6142が閉じられるまでの間、把持された組織の区画を通じ、アンビルエンドキャップ602の把持面6023のステープルガイド6026内に押し込まれる。
【0126】
ステープル6142が完全に閉じると、組織の区画に対する把持力を、第2の駆動軸32が反対の方向に回転することによって軽減することができる。一般に、第2の駆動軸32が反対方向に回転するとき、スラスト要素628もまた、ステープルおよび刃の部分106の構成要素が逆方向に移動することによって、上述の方向とは逆の方向に回転し、それによってステープルプッシャキャリッジ要素622は、例えば近位方向に移動して収縮する。また刃部618は、刃部618のリップ6185がステープルプッシャキャリッジ要素622の首部6221の外部表面に配置された凹部6224内に係合することによって、例えば近位側に移動し、収縮する。さらに、ステープルカートリッジ614は、ステープルカートリッジ614の半径方向内方に延在するリップ6145と刃部618の外部
表面との間に保持されたステープルカートリッジプッシャ617の半径方向外方に延在するリブ6171の締りばめによって収縮する。アンビルエンドキャップ602の把持面6023とステープルカートリッジ614の把持面6146との間の把持力が十分に減じられると、切断されステープル留めされた組織の区画が、アンビルエンドキャップ602の把持面6023とステープルカートリッジ614の把持面6146との間から除去され、外科用アタッチメント600を患者の体内から除去することができる。
【0127】
図16は、本発明の他の実施形態による外科用アタッチメント700の一部の構成要素を概略的に示す側断面図である。外科用アタッチメント700は、例えばケーブルのようなトロカール軸708に結合されたアンビルエンドキャップ702を含む。アンビルエンドキャップ702は把持面7023を含む。把持面7023は、刃収容部7024を形成する凹部を有する。また、把持面7023はステープルガイド7026を形成する。トロカール軸708はステープルおよび刃の部分706を介して延在し、トロカール軸708が、たとえば、図1に示しかつ図1に関連して説明した第1の回転可能な駆動軸30などの回転可能な駆動軸の動作により伸長および収縮されることによって、ステープルおよび刃の部分706に対して移動可能である。
【0128】
ステープルおよび刃の部分706は外部ハウジングスリーブ712を含み、外部ハウジングスリーブ712の近位端はハウジングリヤエンドキャップ750に強固に結合され、外部ハウジングスリーブ712の遠位端はステープルカートリッジ714に強固に結合されている。ステープルカートリッジ714は、ステープル7142が中に格納される複数のステープル受容スロット7141を形成する。ステープル受容スロット7141は、アンビルエンドキャップ702の把持面7023内に形成されたステープルガイド7026と対応しかつ位置合わせされるように構成されている。ステープルカートリッジ714の遠位端は、1つまたは複数の遠位突起7147を有する把持面7146を形成する。
【0129】
また、ステープルおよび刃の部分706は、ステープルカートリッジ714のステープル受容スロット7141と対応しかつ位置合わせされるように構成されたステープルプッシュフィンガ7201を有するステープルプッシャ720を含む。ステープルプッシャ720の遠位端には、刃部718が装着される。ステープルプッシャ720の近位端には、少なくとも最初はステープルプッシャ720をハウジングリヤエンドキャップ750に結合する剪断ピン751が設けられている。
【0130】
動作時には、切断し、ステープル留めすることが望まれる口部組織の区画などの組織の区画は、アンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7946との間に配置される。第1の回転可能な駆動軸30など適切な駆動機構が動作すると、トロカール軸708は、組織の区画がアンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7146との間で十分に把持されるまで、ステープルおよび刃の部分706に対して収縮される。組織の区画がアンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7146との間で十分に把持されると、第1の回転可能な駆動軸30など適切な駆動機構が引き続き動作し、剪断ピン751が剪断される。剪断ピン751が剪断される圧力を、組織の区画が切断およびステープル留めされる前に最適に把持される圧力に事前に決定されていると有利である。剪断ピン751が剪断すると、ステープルカートリッジ714は外部ハウジングスリーブ712およびハウジングリヤエンドキャップ750と共に、ステープルプッシャ720に対して近位側に移動することが可能になる。ステープルカートリッジ714がステープルプッシャ720に対して近位側に移動すると、ステープルプッシャ720のステープルプッシャフィンガ7201は、ステープルカートリッジ714の各ステープル受容スロット7141を通じて移動する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、ステープル7142は、ステープル
7142が閉じられるまでの間、組織の区画を通じてアンビルエンドキャップ702のステープルガイド7026に抗して、ステープルカートリッジ714のステープル受容スロット7141から徐々に押し出される。加えて、かつ通常は同時に、剪断ピン751が剪断すると、ステープルカートリッジ714は、ステープルプッシャ720の遠位端に装着された刃部718に対して近位側に移動する。ステープルカートリッジ714が刃部718に対して近位側に移動すると、刃部718はアンビルエンドキャップ702の把持面7023とステープルカートリッジ714の把持面7146との間で把持された組織の区画を貫通する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、刃部718は、組織の区画が完全に切断されるまでの間、組織の区画を通じてアンビルエンドキャップ702の刃収容部7024内に徐々に押し込まれる。
【0131】
このように、本発明の一実施形態による外科用アタッチメント700は、ステープルプッシャ720、ステープル7142および刃部718が相対的に静止した位置に保持される構成を実現する。アンビルアセンブリ712は、ステープルプッシャ720、ステープル7142および刃部718の間に配置された組織の区画を切断しステープル留めするよう、これらステープルプッシャ720、ステープル7142および刃部718に対して移動する。従来の円形状の切断およびステープル留め用の装置と比較して、この構成では、作用させることができる把持力が増大するため、性能を向上させることが可能になる。このように把持力の増大が可能となるのは、ギヤ装置などを用いてステープルプッシャ、ステープルおよび刃部を静止したアンビルに対して押圧する従来の円形状の切断およびステープル留めの装置とは異なり、外科用アタッチメント700が、相対的に静止した位置に保持されるステープルプッシャ、ステープルおよび刃部に向かって、かつこれらに抗してアンビルアセンブリが引っ張られる構成を実現しているからである。
【0132】
図17は、本発明の他の実施形態による外科用アタッチメント800の一部の構成要素を概略的に示す側断面図である。外科用アタッチメント800は、例えばケーブルのようなトロカール軸808に結合されたアンビルエンドキャップ802を含む。アンビルエンドキャップ802は把持面8023を含む。把持面8023は、トロカール軸808によって形成される軸880に対して例えば傾斜し、直交しない。把持面8023は、刃収容部8024を形成する凹部を有する。また、把持面8023はステープルガイド8026を形成する。トロカール軸808はステープルおよび刃の部分806を通じて延在し、トロカール軸806が、たとえば、図1に示しかつ図1に関連して説明した第1の回転可能な駆動軸30のような回転可能な駆動軸の動作により伸長および収縮されることによって、ステープルおよび刃の部分808に対して移動可能である。
【0133】
ステープルおよび刃の部分806はステープルカートリッジ814を含む。ステープルカートリッジ814は複数のステープル受容スロット8141を形成し、ステープル8142がその中に配置される。ステープル受容スロット8141は、アンビルエンドキャップ802の把持面8023内に形成されたステープルガイド8026と対応しかつ位置が合うように構成されている。ステープルカートリッジ814の遠位端は把持面8146を形成する。把持面8146は、トロカール軸808によって形成される軸880に対して例えば傾斜して直交はしない。把持面8146は、アンビルエンドキャップ802の把持面8023に平行となるように形状および方向が定められることが好ましい。
【0134】
また、ステープルおよび刃の部分806は、ステープルカートリッジ814のステープル受容スロット8141と対応しかつ位置が合うように構成されたステープルプッシャフィンガ8201を有するステープルプッシャ820を含む。ステープルプッシャ820の遠位端には、刃部818が装着される。
【0135】
動作時には、切断し、ステープル留めすることが望まれる口部組織の区画などの組織の
区画は、アンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間に配置される。例えば第1の回転可能な駆動軸30のような適切な駆動機構が動作すると、トロカール軸808は、組織の区画がアンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間で十分に把持されるまで、ステープルおよび刃の部分806に対して収縮する。例えば第1の回転可能な駆動軸30のような適切な駆動機構の動作によってトロカール軸808がステープルおよび刃の部分806に対して収縮する機械的装置は、上記に説明したようなギヤ装置またはその他の適切な機械的装置とすることができる。組織の区画がアンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間で十分に把持されると、例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作し、ステープルカートリッジ814およびステープルプッシャ820が相対的に移動する。この相対的移動は、ステープルプッシャ820が、その一部の例を先に述べた適切な駆動機構によってステープルカートリッジ814に対して押圧されることにより、またはアンビルエンドキャップ802が図16と関連して上述したようなステープルプッシャ820に対して引っ張られることによって容易とすることができる。その他の任意の機械的装置もまた、この目的で用いることができる。ステープルカートリッジ814がステープルプッシャ820に対して移動すると、ステープルプッシャ820のステープルプッシャフィンガ8201は、ステープルカートリッジ814の各ステープル受容スロット8141を通じて移動する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、ステープル8142は、ステープル8142が閉じられるまでの間、組織の区画を通じてアンビルエンドキャップ802のステープルガイド8026に抗しつつ、ステープルカートリッジ814のステープル受容スロット8141から徐々に押し出される。加えて、かつ通常は同時に、ステープルカートリッジ814がステープルプッシャ820の遠位端に装着された刃部818に対して移動すると、刃部818はアンビルエンドキャップ802の把持面8023とステープルカートリッジ814の把持面8146との間で把持された組織の区画を貫通する。例えば第1の回転可能な駆動軸30のような適切な駆動機構が引き続き動作することによって、刃部818は、組織の区画が完全に切断されるまでの間、組織の区画を通じてアンビルエンドキャップ802の刃収容部8024内に徐々に押し込まれる。
【0136】
本発明の一実施形態による外科用アタッチメント800は、ステープルおよび刃の部分806をより容易に患者の体内に挿入することができる配置を実現する。従来の円形状の切断およびステープル留めの装置では、ステープルおよび刃の部分は一般に、例えばステープルおよび刃の部分によって、またはステープルおよび刃の部分を通過するトロカール軸によって形成される全体的な軸に直交する把持面のような、垂直に配置された把持面を有する。この垂直に配置された把持面は、断面では基本的に直角である円周方向の縁部で、ステープルおよび刃の部分の外部ハウジングに接する。患者の体内、特に、非常に小さい断面積を有する患者の口部通路に挿入するとき、垂直に配置された把持面によって形成される円周方向の縁部とステープルおよび刃の部分の外部ハウジングは、口部通路の内部表面に擦れ、それによって挿入が困難になる。さらに、円周方向の縁部が口部通路の内部表面に擦れると、口部通路が損傷を受けることがある。それに対し、ステープルカートリッジ814の把持面8146が傾斜するなど垂直でない配置であれば、体験される口部通路の内部表面に対する擦れの程度が軽減され、それによって、ステープルおよび刃の部分806を口部通路を介して挿入することが容易になり、口部通路の内部表面に損傷を生じる可能性も低下する。
【0137】
図18(a)および18(b)は、本発明の他の実施形態によるステープルおよび刃の部分を示す。具体的には、図18(a)は、ステープルおよび刃の部分906の構成要素の一部を示す分解斜視図である。図18(a)に示すように、ステープルおよび刃の部分906は外部ハウジングスリーブ904を含む。外部ハウジングスリーブ904は、軸方
向の孔部9042および第2の孔部9044をその近位端に形成するギヤハウジング9043を有する。また、外部ハウジングスリーブ904は内部表面に沿って長手方向に延在するキー溝9041を有する。
【0138】
また、ステープルおよび刃の部分906は、例えば可撓性軸104の第2の回転可能な駆動軸104bのような駆動軸に回転しないように結合するように構成された入力軸902を含み、その入力軸902は、例えば取手部102のような取手部を介して、可撓性軸20の第2の回転可能な駆動軸32に結合することができる。入力軸902の遠位端は、入力ギヤ906内にたとえば伸長部の方形状断面を介して回転しないように挿入可能な伸長部を有する。入力ギヤ906の外部表面には、円周方向に配設されたギヤ歯9061が設けられている。
【0139】
また、ステープルおよび刃の部分906は中心孔9081を有するサンギヤ908を含む。サンギヤ908の外側表面は、入力ギヤ906のギヤ歯9061に対応する、円周方向に配設されたギヤ歯9082を有する。また、ステープルおよび刃の部分906は座金910を含む。また、ステープルおよび刃の部分906はリングギヤ912を含む。リングギヤ912は、リングギヤ912の内側表面に沿って円周方向に延在するギヤ歯9121を有する。
【0140】
また、ステープルおよび刃の部906は、第1のプラネタリギヤ914a、第2のプラネタリギヤ914bおよび第3のプラネタリギヤ914cを含む。第1、第2および第3のプラネタリギヤ914a、914b、914cのそれぞれは内部孔9141を形成する。さらに、第1、第2および第3のプラネタリギヤ914a、914b、914cのそれぞれは、円周方向に配設されたギヤ歯9142を含む。
【0141】
また、ステープルおよび刃の部906は、首部9162およびフランジ部9161を有するスパイダーねじ要素916を含み、その首部9162はフランジ部9162に対して遠位方向へ軸方向に延在する。中心孔9166はスパイダーねじ要素916を貫通して延在する。首部9162の外側表面はねじ山9164を形成する。さらに、首部9162の外側表面は長手方向に延在するキー溝9165を形成する。スパイダーねじ要素916のフランジ部9161は、第1、第2および第3のプラネタリギヤ914a、914b、914cの孔9141に対応する例えば円形状の断面を有する、近位側に延在する3つのピン9163を含む。
【0142】
また、ステープルおよび刃の部分906は略扁平で円板状の形状を有するナット918を含む。ナット918は、ナット918を貫通して延在する中心孔9181を有する。中心孔9181は、スパイダーねじ要素916の首部9162の外側表面上のねじ山9164に対応するねじ山9182を形成する。ナット918の遠位面は円周方向の凹部9183を形成する。さらに、ナット918の外径方向の縁部は、外部ハウジングスリーブ904の内部表面のキー溝9041に寸法および形状が対応するキー9184を形成する。
【0143】
また、ステープルおよび刃の部分906は、略扁平で円板状の形状を同様に有する回転式プッシャ920を含む。回転式プッシャ920は、回転式プッシャ920を貫通して延在する中心孔9201を有する。中心孔9201は、スパイダーねじ要素916の首部9162上で長手方向に延在するキー溝9165に寸法および形状が対応するキー9202を形成する。回転式プッシャ920の近位面は、ナット918の遠位面上の円周方向の凹部9183と位置が合う円周方向の凹部9204を形成する。回転式プッシャ920の遠位面には、プッシャカム9203が配設される。
【0144】
さらに、ステープルおよび刃の部分906は刃部922を含む。刃部922は、その遠
位端に沿って円周方向に延在する切断へり9221を有する。また、ステープルおよび刃の部分906はステープルカートリッジ924を含む。ステープルカートリッジ924は、軸方向に配設された複数のステープル受容スロット9241を形成し、ステープル9242がこのステープル受容スロット9241の中に格納される。図18(a)に示す実施形態において、ステープル受容スロット9241は、半径方向に離隔した2列の形態でステープルカートリッジ924の周りに円周方向に配設され、第1の列のステープル受容スロット9241は第2の列のステープル受容スロット9241の外側に位置する。さらに、ステープルカートリッジ924の遠位端は把持面9243を形成する。
【0145】
また、ステープルおよび刃の部分906はステープルプッシャ928を含む。ステープルプッシャ928は軸方向に配設された複数の押歯9281を有し、その複数の押歯9241それぞれは、ステープラカートリッジ924のステープル受容スロット9241と対応しかつ位置が合っている。また、ステープルプッシャ928はその外部表面上にキー9202を含む。
【0146】
図18(b)は、組み立てられた状態にあるステープルおよび刃の部分906の構成要素を示す側断面図である。入力軸902は、ギヤハウジング9043の第2の孔9044を通じて延在しており、その第2の孔9044内で回転するよう構成されている。入力ギヤ906は、入力軸902の遠位端に装着されかつ回転しないように結合される。サンギヤ908は、外側ハウジングスリーブ904の遠位側に延在する円筒形コア9045がサンギヤ908の中心孔9081を通じて挿入されるように、外側ハウジングスリーブ904の近位端内に着座する。入力ギヤ906の外部表面の円周方向に配設されたギヤ歯9061は、サンギヤ908の円周方向に配設されたギヤ歯9082と噛合い係合する。リングギヤ912は、外部ハウジングスリーブ904の近位端内に固定される。第1、第2および第3のプラネタリギヤ914a、914b、914cは、第1、第2および第3のプラネタリギヤ914a、914b、914cの円周方向に配設されたギヤ歯9142が、リングギヤ912の内側表面に沿って円周方向に延在するギヤ歯9121と、サンギヤ908のギヤ歯9082とに噛合い係合するように、サンギヤ908とリングギヤ912との間に半径方向に配置される。座金910は、第1、第2および第3のプラネタリギヤ914a、914b、914cの近位側と入力ギヤ906の遠位側とに、これらの構成要素が軸方向に移動するのを防止するよう当接する。
【0147】
スパイダーねじ要素916のフランジ部9161から延在するピン9163は、第1、第2および第3のプラネタリギヤ914a、914b、914cの内部孔9141に挿入され、それによって、第1、第2および第3のプラネタリギヤ914a、914b、914cの円周方向の間隔を維持する。したがって、スパイダーねじ要素916のフランジ部9161は、第1、第2および第3のプラネタリギヤ914a、914b、914cの遠位側に当接する。
【0148】
スパイダーねじ要素916の首部9162は、首部9162の外側表面上のねじ山9164がナット918の中心孔9181内のねじ山9182と螺合するように、ナット918の中心孔9181を通じて遠位側に延在する。ナット918のキー9184は、外部ハウジングスリーブ904の内部表面内のキー溝9041内に係合する。
【0149】
また、スパイダーねじ要素916の首部9162は、回転式プッシャ920の中心孔9201を通じて遠位側に延在する。回転式プッシャ920の中心孔9201内のキー9202は、スパイダーねじ要素916の首部9162内のキー溝9165内に係合する。さらに、一組のボールベアリング926がナット918および回転式プッシャ920の円周方向の溝9183および9204内にそれぞれ配置され、ナット918と回転式プッシャ920との間で概ね摩擦のない接触を実現する。
【0150】
また、スパイダーねじ要素916の首部9162は、ステープルプッシャ928および刃部922の中心を通じて遠位側に延在する。刃部922およびステープルプッシャ928の近位端は回転式プッシャ920の遠位面に当接する。ステープルプッシャ928のプッシャフィンガ9281は、遠位側に延在し、ステープルカートリッジ924のステープル受容スロット9241と位置合わせされる。ステープルカートリッジ924は、その把持面9243がステープルおよび刃の部分906の遠位面を形成する外部ハウジングスリーブ904の遠位端内に配置される。
【0151】
動作時には、切断し、ステープル留めすることが望まれる口部組織の区画などの組織の区画は、上記により詳細に述べたアンビルアセンブリのようなアンビルアセンブリの把持面と、ステープルカートリッジ924の把持面9243との間に配置される。例えば第1の回転可能な駆動軸30のような適切な駆動機構が動作すると、ステープルおよび刃の部分906を通じて延在する、例えばケーブルのようなトロカール軸は、組織の区画が各把持面の間で十分に把持されるまで、ステープルおよび刃の部分906に対して収縮される。例えば第1の回転可能な駆動軸30のような適切な駆動機構の動作によってトロカール軸をステープルおよび刃の部分906に対して収縮させる機械的装置は、上記に説明したようなギヤ装置またはその他の適切な機械的装置とすることができる。
【0152】
図18(b)を参照すると、入力軸902は、例えば、可撓性軸104の第2の回転可能な駆動軸104bのような駆動軸に結合することができる。駆動軸は、例えば取手部102のような取手部を介して、可撓性軸20の第2の回転可能な駆動軸32に結合することができる。駆動軸が例えば時計回りの第1の方向に回転すると、入力軸902がギヤハウジング9043の第2の孔9044内で第1の方向に回転する。入力軸902の遠位端が入力ギヤ906と回転しないように結合することによって、入力軸902が第1の方向に回転すると、入力ギヤ906もまた第1の方向に回転する。
【0153】
入力ギヤ906の円周方向に配設されたギヤ歯9061がサンギヤ908の円周方向に配設されたギヤ歯9082と噛合い係合することによって、入力ギヤ906が第1の方向に回転すると、サンギヤ908が、外部ハウジングスリーブ904内の遠位側に延在する円筒形コア9045を中心として、例えば反時計回りの第2の方向に回転する。さらに、第1、第2および第3のプラネタリギヤ914a、914bおよび914cの外部表面上の円周方向に配設されたギヤ歯9142がサンギヤ908の円周方向に配設されたギヤ歯9082と噛合い係合することによって、サンギヤ908が第2の方向に回転すると、第1、第2および第3のプラネタリギヤ914a、914bおよび914cが第1の方向に回転する。また、第1、第2および第3のプラネタリギヤ914a、914bおよび914cの外部表面上の円周方向に配設されたギヤ歯9142は、リングギヤ912の内側表面に沿って円周方向に延在するギヤ歯9121と噛合い係合し、リングギヤ912は外部ハウジングスリーブ904の近位端内に回転可能に固定されているため、第1、第2および第3のプラネタリギヤ914a、914bおよび914cが第1の方向に回転すると、その結果、サンギヤ908を中心として第2の方向に旋回することになる。
【0154】
スパイダーねじ要素916のフランジ部916から延在するピン9163は、第1、第2および第3のプラネタリギヤ914a、914b、914cの内部孔9141に挿入されるため、第1、第2および第3のプラネタリギヤ914a、914b、914cがサンギヤ908を中心として第2の方向に旋回動作すると、星型のねじ要素916もまた第2の方向に回転する。首部9162の外側表面上のねじ山9164がナット918の中心孔9181内のねじ山9182と螺合すること、およびナット918のキー9184が外部ハウジングスリーブ904の内側表面内のキー溝9041内に係合することによって、スパイダーねじ要素916が第2の方向に回転すると、ナット918はスパイダーねじ要素
916の首部9162に沿って遠位側に前進する。
【0155】
回転式プッシャ920の中心孔9201内のキー9202はスパイダーねじ要素916の首部9162内のキー溝9165内に係合するため、スパイダーねじ要素916が第2の方向に回転すると、回転式プッシャ920は第2の方向に回転する。回転式プッシャ920の近位側部はナット918の遠位側部に接触し、したがってナット918がスパイダーねじ要素916の首部9162に沿って前進すると、回転式プッシャ920もまたスパイダーねじ要素916の首部9162に沿って遠位側に前進する。ナット918の円周方向の凹部9183および9204内にそれぞれ配置された一組のボールベアリング926と、回転式プッシャ920とはそれぞれ、回転しないナット918と回転する回転式プッシャ920との間で概ね摩擦のない接触を実現する。
【0156】
回転式プッシャ920がスパイダーねじ要素916の首部9162に沿って遠位側に前進すると、刃部922はステープルカートリッジ924の中心孔9244を介して遠位側に移動して、先に述べたような、ステープルカートリッジ924の把持面9243とアンビルアセンブリ(図示せず)の把持面との間に配置された組織の区画を切断する。さらに、回転式プッシャ920がスパイダーねじ要素916の首部9162に沿って遠位側に前進すると、回転式プッシャ920のプッシャカム9203はステープルプッシャ要素928を遠位方向に押す。回転式プッシャ920は遠位側に前進すると同時に回転するため、プッシャカム9203はステープルプッシャ928のステープルプッシャフィンガ9281に対して順次接触しかつ押圧する。具体的には、回転式プッシャ920がスパイダーねじ要素916の首部9162を中心として漸次的に回転するとき、プッシャカム9203は、ステープルプッシャフィンガ9281の1番目、次いでステープルプッシャフィンガ9281の2番目など、ステープルプッシャフィンガ9281に対して接触しかつ押圧する。回転式プッシャ920がスパイダーねじ要素916の首部9162を中心として完全に回転した後には、プッシャカム9203は、ステープルプッシャ928のステープルプッシャフィンガ9281のすべてに対して、接触および押圧を完了する。回転式プッシャ920の遠位側部に対するプッシャカム9203の高さおよびステープル9242の突出部の長さによっては、プッシャカム9203がステープルプッシャ928に接触すると、プッシャカム9203がステープルカートリッジ924のスロット9241からステープルを完全に押し出すため、およびステープル9242がアンビルアセンブリのステープルガイド(図示せず)に対して完全に閉じられるためには、回転式プッシャ920を複数回、完全に回転させることが必要になる場合がある。
【0157】
前述のように、患者の体内に挿入される外科装置、特に従来の切断およびステープル留めの装置を使用する間に経験される問題の1つは、それらの装置が、患者の口部通路など、比較的小さい断面積を有する患者の開口部または通路に挿入することが必要であるということである。したがって、外科装置の挿入は困難もしくは不可能となることがあり、及び/又は口部通路の内部表面に損傷を与えることがある。本発明の一実施形態によれば、患者の小さな開口部または通路の中に、またはそれを介して外科装置を挿入するために、スリーブを用いることができる。たとえば、図19(a)から19(e)は、患者の小さな開口部または通路の中に、およびそれを介して外科装置を挿入することを容易にするスリーブを示している。
【0158】
図19(a)は、本発明の一実施形態による、患者の体内に挿入する間に円形の切断およびステープル留めの装置などの外科装置を被覆するよう構成されたスリーブ8000の分解斜視図である。スリーブ8000は一般に、スリーブ8000によって被覆される外科装置の寸法と形状及び/又は外形に類似した寸法と形状及び/又は外形を有すると有利である。例示のみを目的として、以下で説明するスリーブは、外科用アタッチメント100と共に使用するために述べられているが、それらのスリーブはいかなる種類の外科装置
を被覆するためにも利用することができることは理解されるべきである。さらに、例示のみを目的として、以下で説明するスリーブは、患者の口部通路内に挿入する外科装置を被覆するために用いられるものとして述べられているが、それらのスリーブは、あらゆる種類の患者の開口部または通路への外科装置の挿入に対応することができることは理解されるべきである。
【0159】
スリーブ8000は、組織適合可能な滅菌可能なエラストマー材料で形成することができる。好ましくは、スリーブ8000はオートクレーブ滅菌可能な材料で形成することができる。さらに、スリーブ8000は、高度な、または比較的高度な潤滑性を有する材料で形成することができる。たとえば、スリーブ8000は、テフロン(登録商標)(すなわち、ポリテトラフルオロエチレン(PTFE)などのフルオロポリマー)、シリコーン樹脂、たとえばSIL−KORE(登録商標)(W.L.Gore&Associates社製)、などのテフロン(登録商標)/シリコーンの組合せ、伸展テフロン(登録商標)などの「EPTFE」等の材料で形成することができる。利用することができるその他の適切な材料については、本出願人による同時係属中の、2002年3月15日に出願された特許文献15でさらに詳細に記載されており、この特許文献15は先に述べたようにその全体が参照により本明細書に明らかに組み込まれる。
【0160】
スリーブ8000は、挿入位置と収縮位置との間で選択的に調整されるよう構成された、閉包要素8020および8022などの1つまたは複数の閉包要素を含む。また、スリーブ8000は遠位部分8024を含む。遠位部分8024は、ステープルおよび刃の部分106などの外科装置の遠位部分または外科装置のその他の遠位部分を被覆するよう構成することができる。スリーブ8000はまた、近位部分8026を含むことができる。近位部分8026は、外科装置の近位部分を被覆するよう構成することができる。たとえば、スリーブ8000の近位部分8026は、図1に示しかつ図1に関連して説明した可撓性軸20もしくは可撓性軸104などの可撓性軸、または図7(a)に示しかつ図7(a)に関連して説明した取手部102もしくは図13(a)に示しかつ図13(a)に関連して説明した取手部5102などの取手部を被覆するよう構成することができる。環状導入要素8010は、スリーブ8000の近位部分8026に結合することができ、スリーブ8000内に外科装置を挿入することを容易にするよう機能することができる。
【0161】
図19(b)は、本発明の一実施形態によるスリーブ8000の一部分の側断面図である。この実施形態において、閉包要素8020および8022は「カモノハシ」に類似した形状を形成するよう先細となっている。スリーブ8000の閉包要素は、外科用アタッチメント100を口部通路に挿入することを容易にする任意の適切な形状を有することができることは理解されるべきである。図19(b)は、スリーブ8000が口部通路内への挿入に適する閉位置にある閉包要素8020および8022を示す。閉包要素8020および8022が、図示のように閉位置にあるとき、閉包要素8020および8022が先細の配置となるため、スリーブ8000と、それによって被覆される外科用アタッチメント100とを口部通路に挿入することがより容易となり、それによって、口部通路の内部表面に損傷をもたらす可能性が低下する。一実施形態において、閉包要素8020および8022は、図1に示しかつ図1に関連して説明したトロカール110などのトロカールに取り付けられるなど、外科用アタッチメント100の一部分に取り付けられることによって閉位置に保持される。
【0162】
図19(c)は、開位置にある閉包要素8020および8022を示している。具体的には、スリーブ8000が口部通路に挿入された後、閉包要素8020および8022は、スリーブ8000内の外科用アタッチメント100が所望の外科手術を実施することができるように開くことができる。たとえば、閉包要素8020および8022は、アンビルアセンブリ112をステープルおよび刃の部分106に結合し、次いでステープルおよ
び刃の部分106に向かって、かつ抗して収縮させるよう開くことができる。
【0163】
閉包要素8020および8022を開くために、遠位部分8024及び/又は閉包要素8020および8022は収縮機構を有することができる。たとえば、図19(a)は、スリーブ8000の遠位部分8024の一部分、またはスリーブ8000の遠位部分8024から延在するフラップ8028を示している。これらのフラップ8028は、閉包要素8020および8022に貼り付ける、または閉包要素8020および8022の円周方向に配設されたスロット8030を通じて挿入することによって、閉包要素8020および8022に結合することができる。したがって、スリーブ8000は口部通路に挿入された後に、外科用アタッチメント100に対して近位方向に移動することができる。スリーブ8000が外科用アタッチメント100に対して近位方向に移動すると、閉包要素8020および8022は枢転されるかまたは開かれる。
【0164】
スリーブ8000および外科用アタッチメント100の寸法および形状によっては、閉包要素8020および8022が開いても、スリーブ8000は所定位置に残存することができる。この場合、スリーブ8000は、外科用アタッチメント100を口部通路から除去するのを容易にするために、例えば外科手技の完了後のように、事後に用いることができる。あるいは、閉包要素8020および8022が開くと、外科用アタッチメント100は口部通路に残存する一方で、スリーブ8000は近位方向に外科用アタッチメント100に対して引き続き移動することによって、口部通路から除去することができる。この場合、閉包要素8020および8022を含めてスリーブ8000は、外科用アタッチメント100に対して摺動する。フラップ8028は図19(a)では長手方向に直線的であるものとして示されているが、他の実施形態においては、フック、輪など、異なる形状を有することができる。
【0165】
図19(d)および19(e)は、本発明の他の実施形態によるスリーブ8100を示している。具体的には、図19(d)は挿入位置にあるスリーブ8100を示している。挿入位置において、スリーブ8100は、外科用アタッチメント100を被覆すると共に、外科用アタッチメント100を口部通路に挿入することを容易にするよう構成されている。
【0166】
スリーブ8100は、遠位部分8105を含むことができる。遠位部分8105は、ステープルおよび刃の部分106など、外科用アタッチメント100の遠位部分を被覆するよう構成することができる。また、スリーブ8100は近位部分8107を含むことができる。近位部分8107は、外科用アタッチメント100の近位部分または外科用アタッチメント100に結合されたその他の構成要素を被覆するよう構成することができる。たとえば、スリーブ8100の近位部分8107は、図1に示しかつ図1に関連して説明した可撓性軸20もしくは可撓性軸104などの可撓性軸、または図7(a)に示しかつ図7(a)に関連して説明した取手部102もしくは図13(a)に示しかつ図13(a)に関連して説明した取手部5102などの取手部を被覆するよう構成することができる。
【0167】
また、スリーブ8100は閉包要素を含むことができる。閉包要素はまた、リング8102として構成することができるが、その他の形状を用いることもできる。スリーブ8100が挿入位置にあるとき、リング8102は、リング8102によって形成される軸8104がステープルおよび刃の部分106によって形成される長手方向の軸8106に実質的に直交するように配置することができる。リング8102は、ステープルおよび刃の部分106を通じて延在するトロカール110に取り付けられるなど、外科用アタッチメント100の一部分に取り付けられることによって、この位置に保持することができる。この位置で、リング8102の一方の側部8110はステープルおよび刃の部分106の遠位側部と接触し、リング8102の反対側の側部8112はステープルおよび刃の部分
106の反対側に配置される。リング8102の円形の外周は全体的に湾曲した表面を有し、この表面は口部通路に挿入する際、外科用アタッチメント100がそれを通過する前に口部通路を漸次的に開く。このようにして、外科用アタッチメント100を口部通路に挿入することが容易にすることができる。
【0168】
図19(e)は収縮位置にあるリング8102を示している。具体的には、中に外科用アタッチメント100を有するスリーブ8100が口部通路に挿入された後、リング8102は、外科用アタッチメント100が所望の外科手術を実施することができるよう、外科用アタッチメント100に対して移動することができる。たとえば、リング8102は、アンビルアセンブリ112をステープルおよび刃の部分106に結合し、次いでステープルおよび刃の部分106に向かって収縮させるよう、軸8109に対して回転することができる。リング8102を収縮させるために、スリーブ8100は近位方向に外科用アタッチメント100に対して移動することができる。スリーブ8100が近位方向に外科用アタッチメント100に対して移動すると、リング8102は、外科用アタッチメント100のたとえばトロカール100から取り外され、ステープルおよび刃の部分106に向かって、かつ抗して引き寄せられる。スリーブ8100が近位方向に外科用アタッチメント100に対して引き続き移動すると、リング8102は回転し、結果的に、リング8102によって形成される軸8104がステープルおよび刃の部分106によって形成される軸8106と同軸となるように配置される。この位置で、リング8102は、その外径がステープルおよび刃の部分106の外径よりも小さい場合、図19(e)に示すリング8102の円周全体でステープルおよび刃の部分106と接触することができる。したがって、スリーブ8100は、外科手術の間に引き続きステープルおよび刃の部分106を被覆することができ、外科用アタッチメント100を口部通路から除去することを容易にするため、外科手技の完了後など、事後に用いることができる。あるいは、リング8102の外径がステープルおよび刃の部分106の外径よりも大きい場合、スリーブ8100が外科用アタッチメントに対して引き続き移動すると、リング8102は、スリーブ8100を口部通路から除去するために外科用アタッチメント100に対して摺動する。
【0169】
このようにして、上述した本発明の複数の目的および利点が最も効果的に達成される。当業者には、上述の例示的実施形態の多数の変型が本発明の精神および技術的範囲から逸脱することなく実施することができることは理解されよう。本明細書においては本発明の単一の例示的実施形態について説明し開示したが、本発明がそれによって限定されることはなく、本発明の範囲は添付の特許請求の範囲によって定められることは理解されるべきである。
【特許請求の範囲】
【請求項1】
明細書に記載の発明。
【請求項1】
明細書に記載の発明。
【図2】


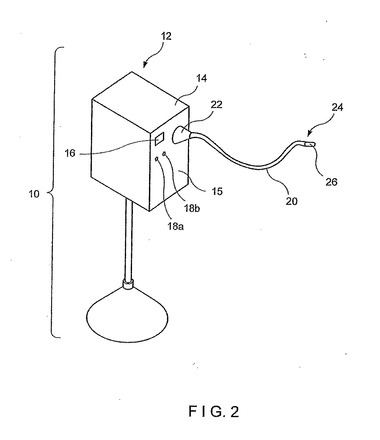
【図3】
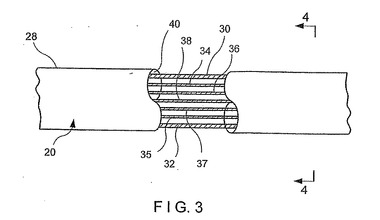
【図4】
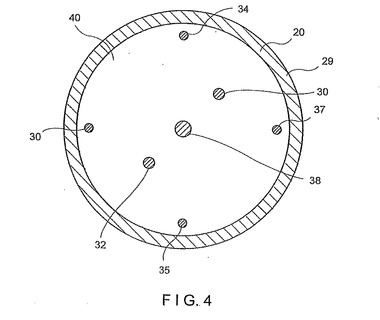
【図5(a)】
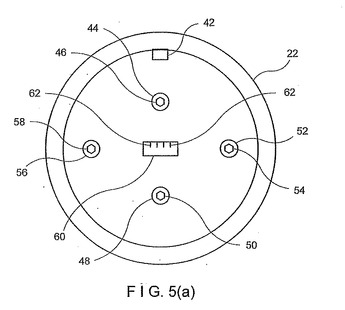
【図5(b)】
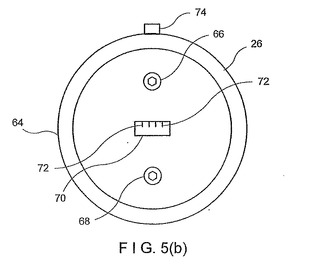
【図6(a)】
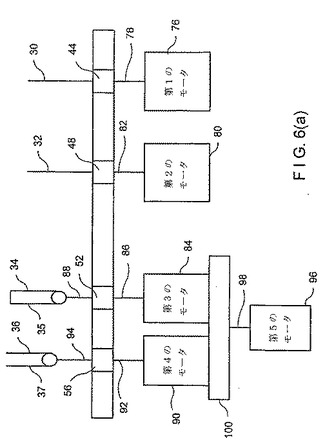
【図6(c)】
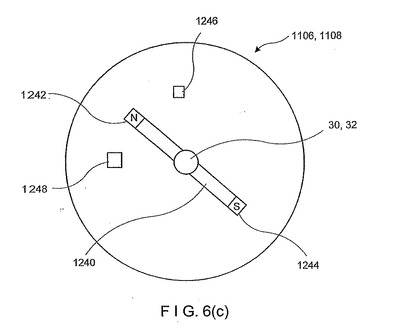
【図6(d)】
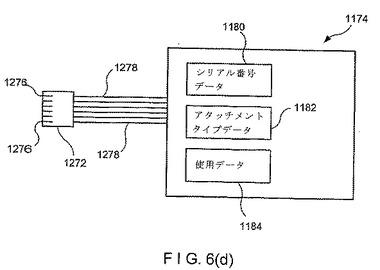
【図6(e)】
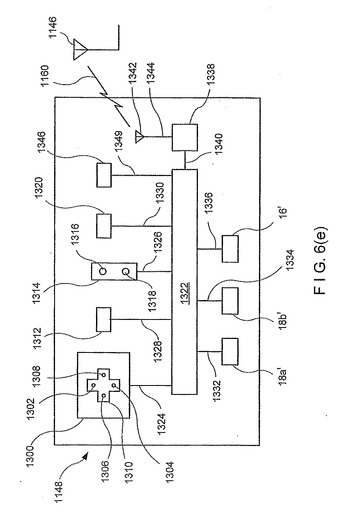
【図6(f)】
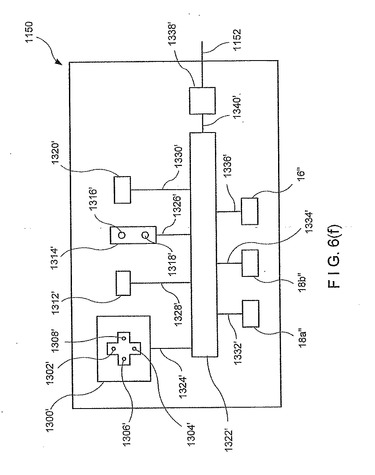
【図7(a)】
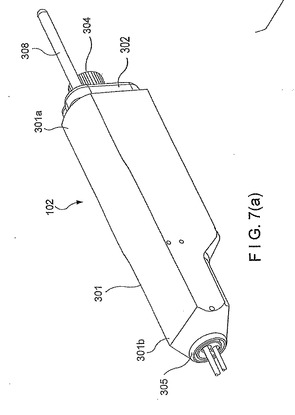
【図7(b)】
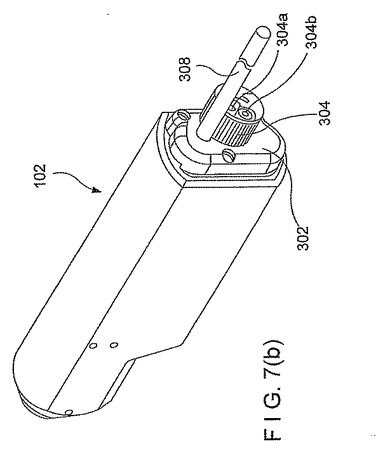
【図7(e)】
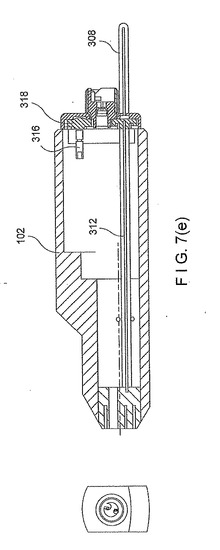
【図7(f)】
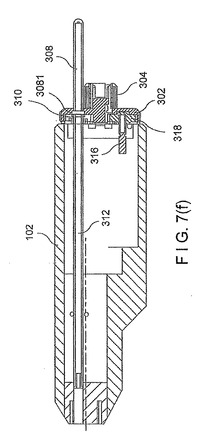
【図8】
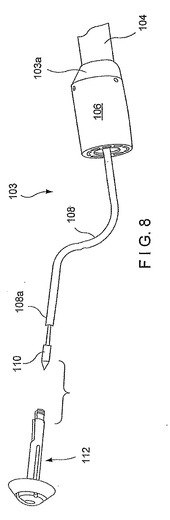
【図9】
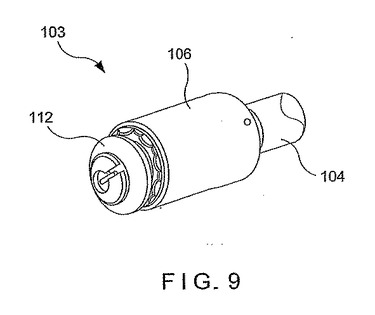
【図10(a)】
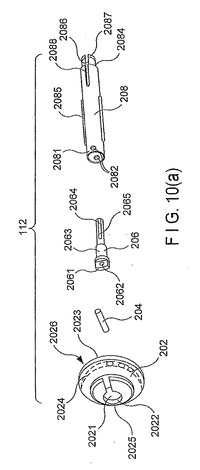
【図11(a)】
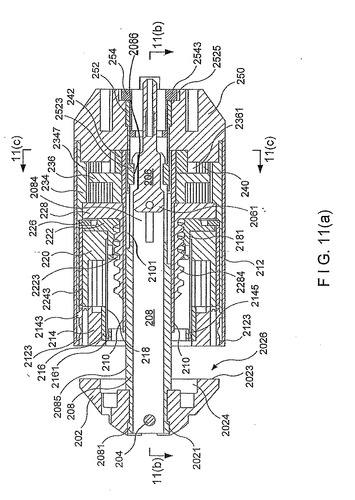
【図11(b)】
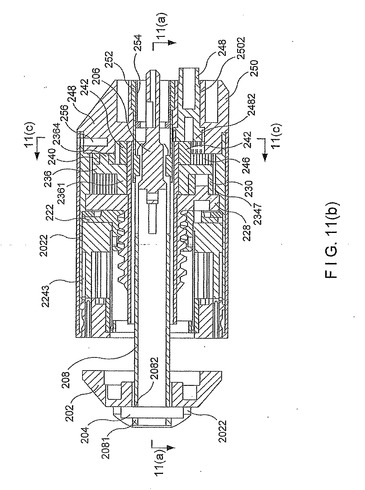
【図15−2】
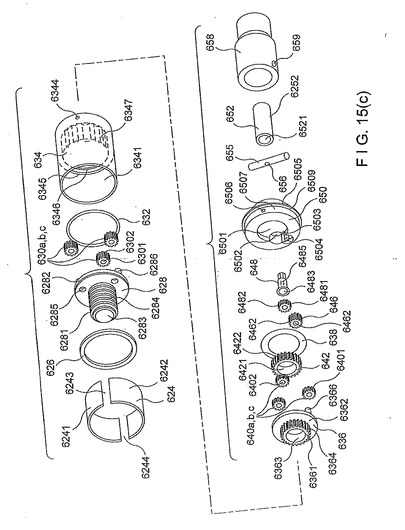
【図15−3】
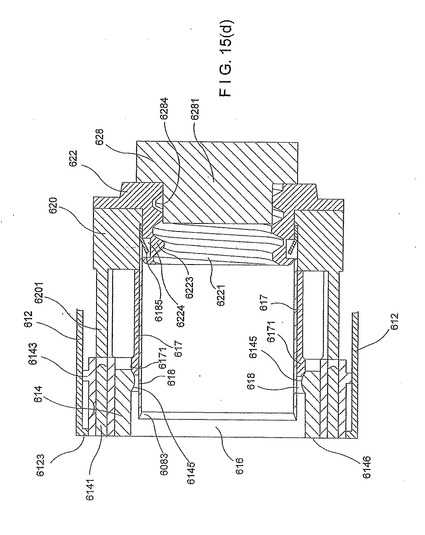
【図16】
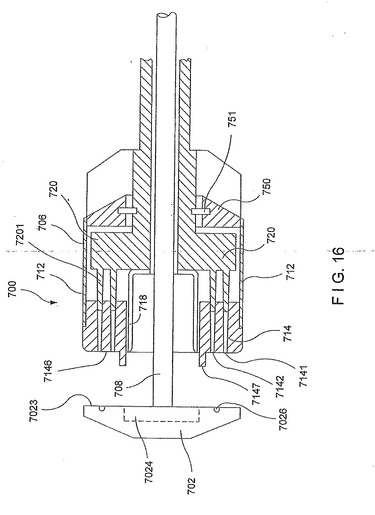
【図17】
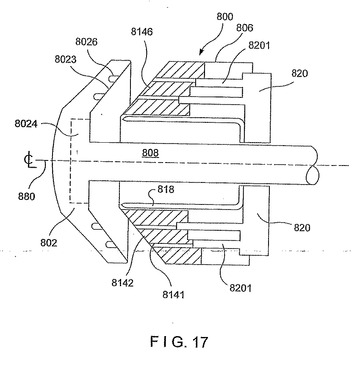
【図18−2】
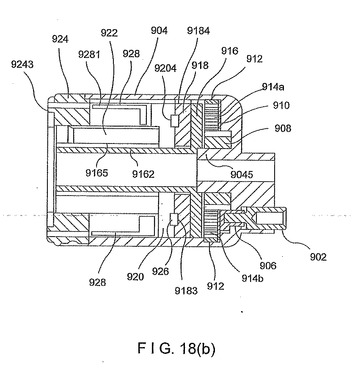
【図19−1】
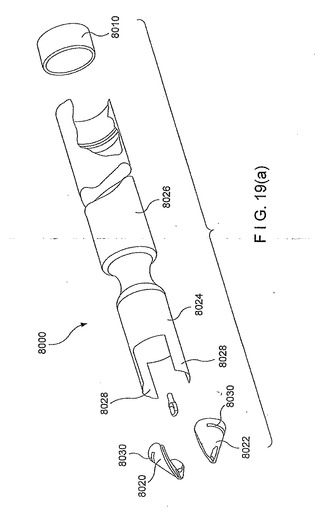
【図19−2】
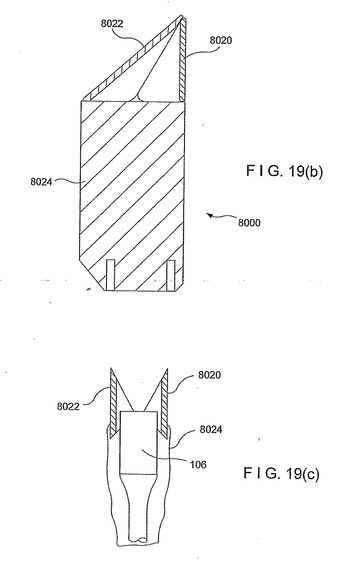
【図19−3】
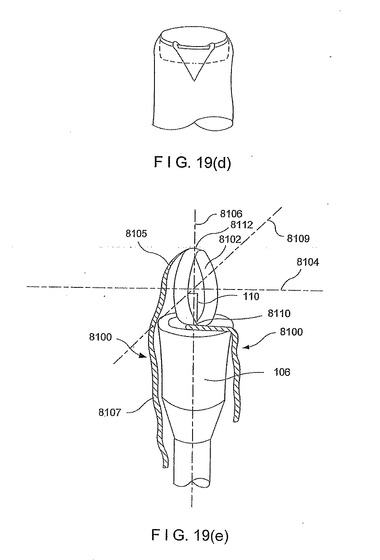
【図1】
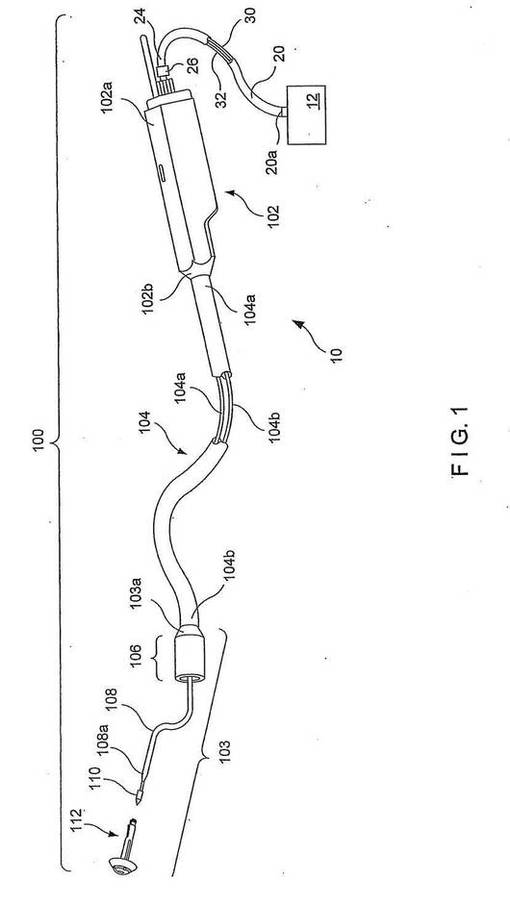
【図6(b)】
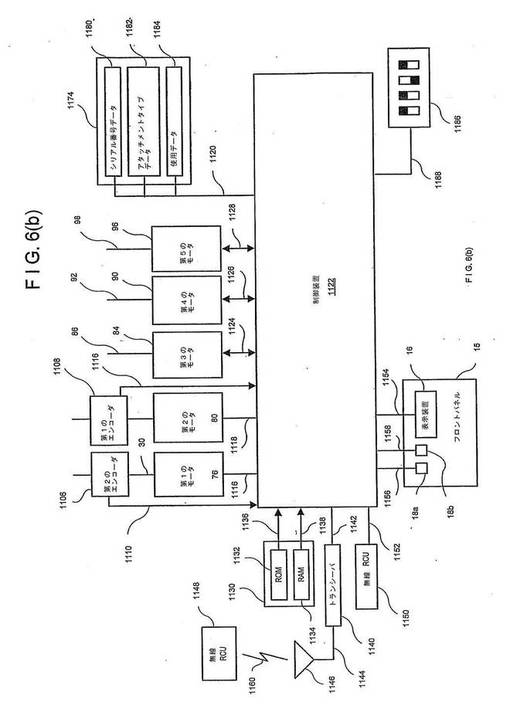
【図7(c)】
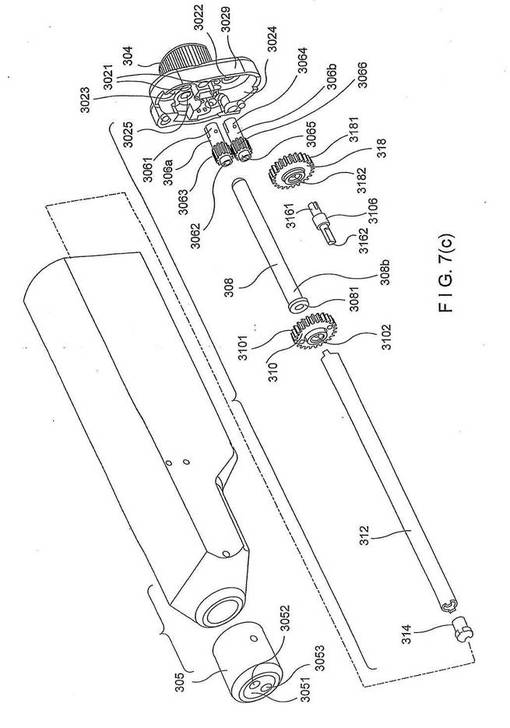
【図7(d)】
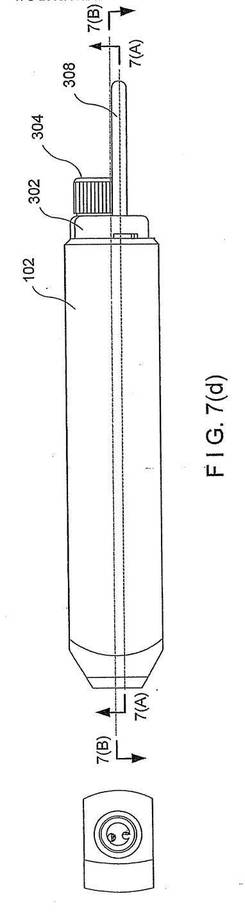
【図10(b)】
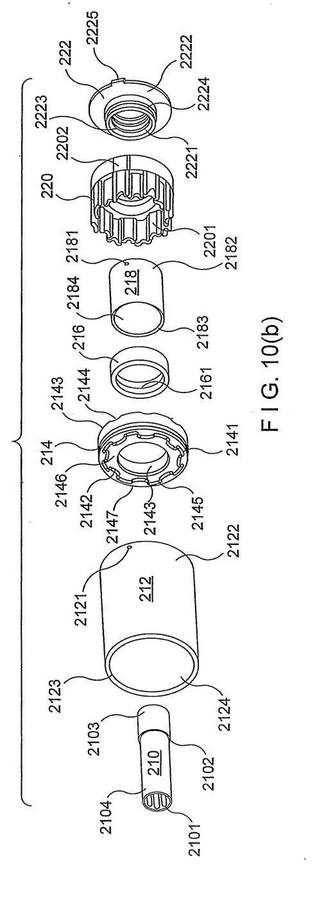
【図10(c)】
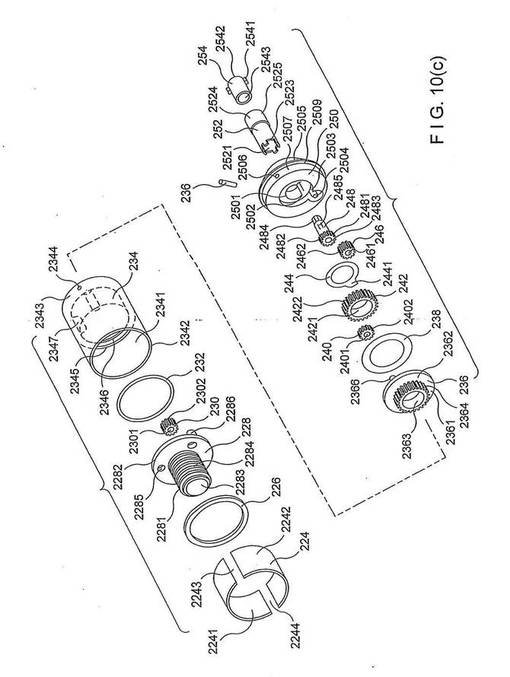
【図12】
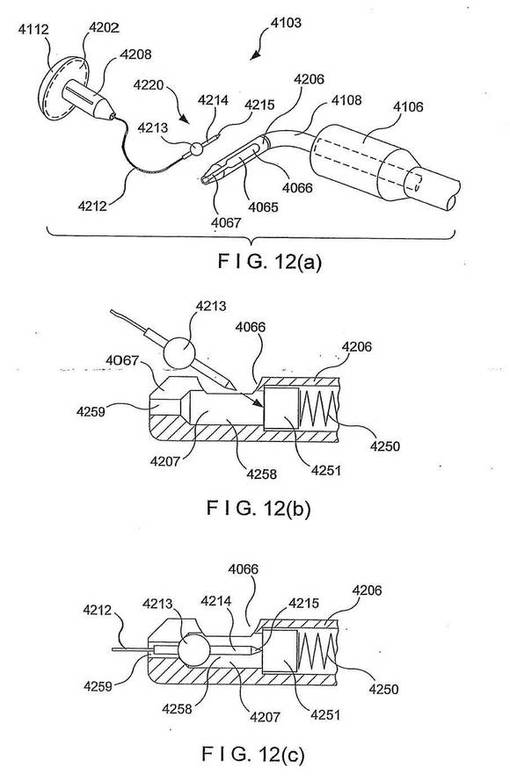
【図13−1】
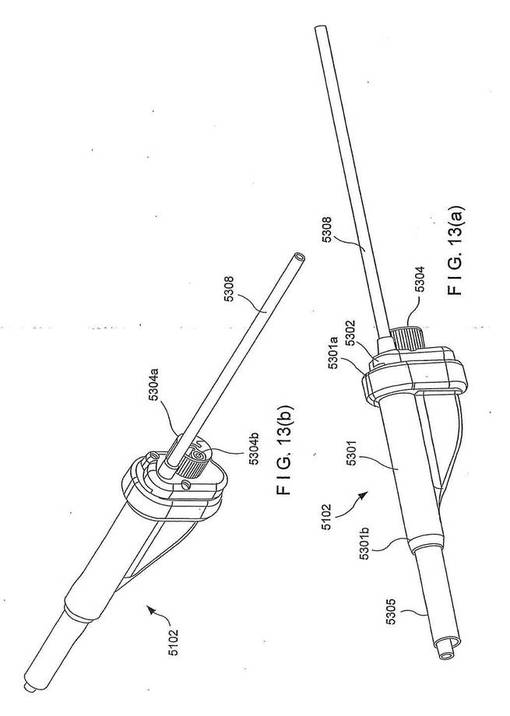
【図13−2】
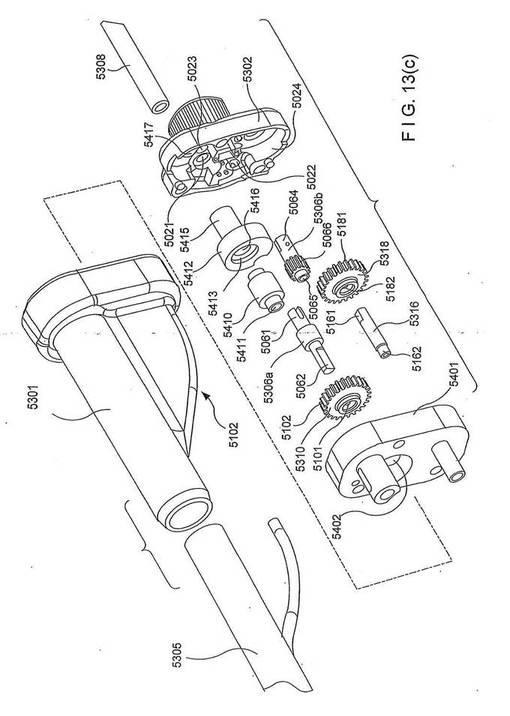
【図14−1】
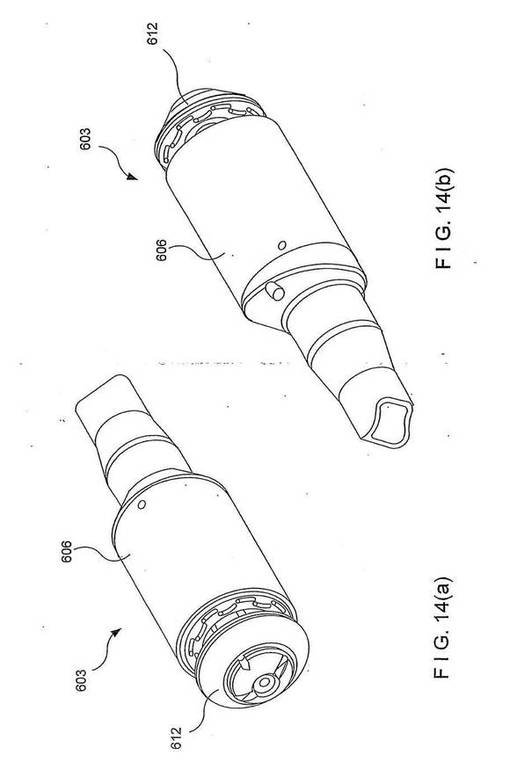
【図14−2】
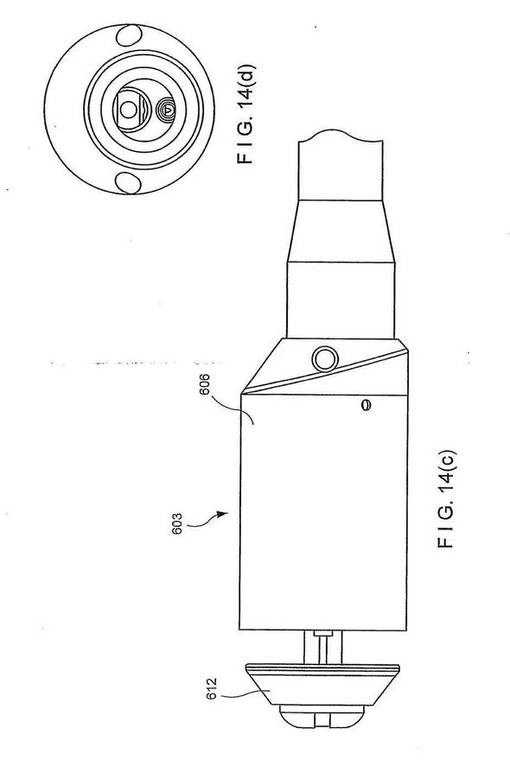
【図15−1】
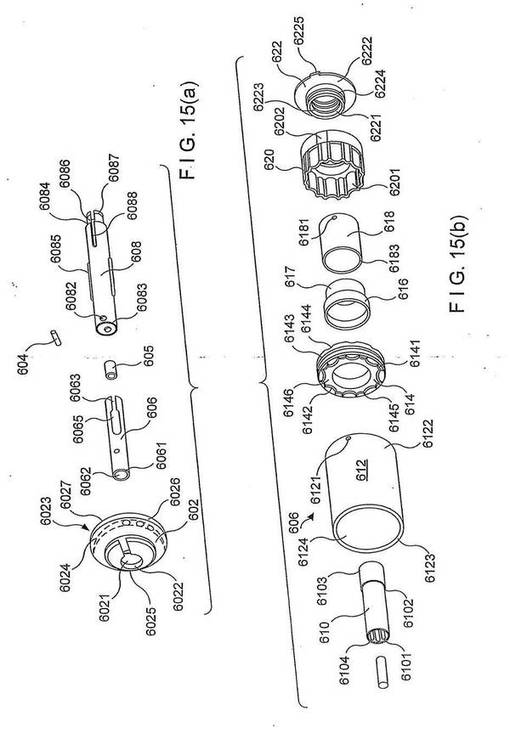
【図18−1】
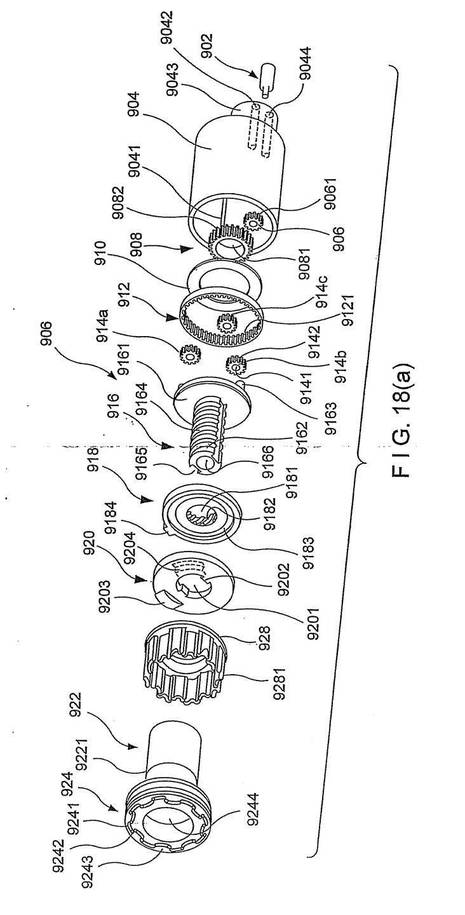
【図3】
【図4】
【図5(a)】
【図5(b)】
【図6(a)】
【図6(c)】
【図6(d)】
【図6(e)】
【図6(f)】
【図7(a)】
【図7(b)】
【図7(e)】
【図7(f)】
【図8】
【図9】
【図10(a)】
【図11(a)】
【図11(b)】
【図15−2】
【図15−3】
【図16】
【図17】
【図18−2】
【図19−1】
【図19−2】
【図19−3】
【図1】
【図6(b)】
【図7(c)】
【図7(d)】
【図10(b)】
【図10(c)】
【図12】
【図13−1】
【図13−2】
【図14−1】
【図14−2】
【図15−1】
【図18−1】
【公開番号】特開2013−99538(P2013−99538A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−275488(P2012−275488)
【出願日】平成24年12月18日(2012.12.18)
【分割の表示】特願2011−11406(P2011−11406)の分割
【原出願日】平成17年2月23日(2005.2.23)
【出願人】(501289751)コヴィディエン リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−275488(P2012−275488)
【出願日】平成24年12月18日(2012.12.18)
【分割の表示】特願2011−11406(P2011−11406)の分割
【原出願日】平成17年2月23日(2005.2.23)
【出願人】(501289751)コヴィディエン リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]