
外科用器具のための方法および力制限ハンドル機構
【課題】組織への損傷を防ぐために、ハンドルアセンブリから端部エフェクターに伝達される力の量を制限する機構を組み込む外科用器具との使用のためのハンドルアセンブリを提供する。
【解決手段】作動する遠位端部分を有する外科用器具との使用のためのハンドルアセンブリ10であって:ハンドルハウジング12;該ハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素;該ハンドルハウジング内に位置決めされ、そして該駆動要素と係合可能であり、該ハンドルハウジング内で該駆動要素を移動させる駆動アセンブリ20;該ハンドルハウジング上に移動可能に取り付けられるアクチュエーター;および該駆動アセンブリと該アクチュエーターとの間に配置される力制限機構30であって、該アクチュエーターを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
【解決手段】作動する遠位端部分を有する外科用器具との使用のためのハンドルアセンブリ10であって:ハンドルハウジング12;該ハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素;該ハンドルハウジング内に位置決めされ、そして該駆動要素と係合可能であり、該ハンドルハウジング内で該駆動要素を移動させる駆動アセンブリ20;該ハンドルハウジング上に移動可能に取り付けられるアクチュエーター;および該駆動アセンブリと該アクチュエーターとの間に配置される力制限機構30であって、該アクチュエーターを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
【発明の詳細な説明】
【技術分野】
【0001】
(背景)
(技術分野)
本開示は、外科用器具との使用のための方法およびハンドルに関する。より詳細には、本開示は、遠位端エフェクターを有する外科用器具との使用のための力制限機構を取り込む方法およびハンドルアセンブリに関する。
【背景技術】
【0002】
(関連技術の背景)
種々の器具が、組織を操作するために外科用手順の間に用いられる。これら器具のいくつかは、力を組織に適用される端部エフェクターに伝達するために提供されるハンドルアセンブリを取り込む。例えば、いくつかの外科用器具は、種々の組織を把持するか、または切断するために遠位端上に一対の顎が提供され得る。ハンドルアセンブリの作動は、このハンドルアセンブリと連結されるトリガー機構からの力をこれらの顎に伝達し、そしてそれ故、組織に伝達することによってこれらの顎を開閉する。その他のタイプの外科用器具は、ステープル、クリップ、またはその他のファスナーを組織に付与するような形態である端部エフェクターを適用するファスナーが提供され得る。これらのタイプの外科用器具と連結されるハンドルアセンブリの作動は、組織を通って、そして/または組織中にステープルを駆動するように機能するか、または外科用クリップを組織の周りで、ハンドルアセンブリからの力をステープルまたはクリップ付与端部エフェクターに伝達することによって圧縮する。
【0003】
上記に記載の外科用器具との特定の外科用手順の実行の間に、上記ハンドルアセンブリから上記端部エフェクターへの力の付与および伝達は、最終的に、手術されている組織への過剰の損傷を生じ得る。例えば、把持器具が組織を操作するために利用されるとき、組織に付与された過剰の力は、不注意に組織への損傷を引き起こし得る。
【発明の概要】
【発明が解決しようとする課題】
【0004】
外科用器具のハンドルアセンブリから端部エフェクターに伝達される過剰の力に起因する損傷の可能性に加えて、損傷はまた、この器具自体に起因して生じ得る。これは、手術される組織が、それが外科用器具によって圧縮または切断されることができないように十分剛直または硬い場合に生じ得る。さらに、特定の硬い組織は、組織のステープル留めが所望される状況でファスナーに付与される力の量によっては貫通できないかもしれない。同様に、器具は、組織の圧縮が外科用クリップの付与の間に要求される場合、これら組織を完全に圧縮できないかも知れない。さらに、多くの外科用器具は、組織に複数のクリップまたはステープルを付与するために置換可能または使い捨て可能なカートリッジアセンブリを利用する。外科用器具に対するこのカートリッジアセンブリの不適切な位置決め、またはこれらカートリッジアセンブリ自体の誤作動は、ハンドルアセンブリのトリガーに対する圧力の付与に対する外科用器具の抵抗を生じ得、それによって、外科用器具自体への損傷を引き起こす。これはまた、カートリッジアセンブリにファスナーがなく、そして外科医がこの外科用器具を継続するか、または再使用することを試みる場合に生じ得る。
【0005】
それ故、組織への損傷を防ぐために、ハンドルアセンブリから端部エフェクターに伝達される力の量を制限する機構を組み込む外科用器具との使用のためのハンドルアセンブリが有用であり得る。さらに、外科用器具自体への損傷を防ぐために端部エフェクターに伝達される力の量を制限し得る外科用器具との使用のためのハンドルアセンブリ自体もまた有用であり得る。
【課題を解決するための手段】
【0006】
(要旨)
作動する遠位端部分を有する外科用器具との使用のために調節可能な力制限機構を有するハンドルアセンブリが開示される。このハンドルアセンブリは、一般に、ハンドルハウジング、およびこのハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素を含む。駆動アセンブリは、このハンドルハウジング内に位置決めされ、そして上記駆動要素と係合可能であり、このハンドルハウジング内で上記駆動要素を移動する。アクチュエーターは、このハンドルハウジング上に移動可能に取り付けられる。
【0007】
力制限機構が、上記駆動アセンブリと上記アクチュエーターとの間に、このアクチュエーターを駆動アセンブリに離脱可能に連結する力制限機構を備えるように配置される。この力制限機構は、上記駆動アセンブリに取り付けられる第1の端部を有する連結ロッド、および上記アクチュエーター内に取り付けられる第2の端部を含む。この力制限機構は、上記アクチュエーター内に位置決めされ、そして上記連結ロッドの第2の端部に隣接するスプリングを含む。この力制限機構はまた、前記アクチュエーター内に位置決めされ、そして上記スプリングと係合可能であってこのスプリング内の力を変動する調節ねじを含む。
【0008】
上記連結ロッドは突出部を有し、そして上記駆動アセンブリは上記連結ロッド上の突出部と離脱可能に係合可能である切り抜き部分を有する。1つの実施形態では、この駆動アセンブリは、上部キャリアおよび下部キャリアを含む。この上部キャリアは、上記連結ロッドの第1の端部に連結される。上記下部キャリアは、上記駆動アセンブリの切り抜き部分を含み、そして上記連結ロッド上の突出部と係合可能である。1つの実施形態では、上記連結ロッドは、上記切り抜き部分が上記連結ロッド上の突出部から外れるとき、上記切り抜き部分を含む下部キャリアの一部分を支持するための傾斜部材を有する。
【0009】
上記下部キャリアは、上記ハンドルハウジング上に回転可能に取り付けられ、そして上記上部キャリア上の旋回点と第1の軸を規定する。上記連結ロッドは、上記上部キャリア上の連結点と第2の軸を規定する。上記第1の軸および第2の軸は、上記突出部が上記切り抜きと係合するとき実質的に平行である。上記第1の軸および第2の軸は、上記突出部が上記切り抜きと係合しないとき実質的に平行でない。1つの実施形態では、上記下部キャリアは、上記切り抜きを含む少なくとも1つの可撓性アームを有する。この可撓性アームは、上記突出部が上記切り抜きから外れるとき上記下部キャリアに対して外方に可撓性である。上記連結ロッドは、上記突出部が上記切り抜きから外れるとき上記可撓性アームを支持するための傾斜部材を含む。
【0010】
作動遠位端部分を有する外科用器具との使用のためのハンドルアセンブリがまた開示される。このハンドルアセンブリは、一般に、ハンドルハウジング、およびこのハンドルハウジング内に移動可能に取り付けられ、そして上記作動遠位端部分に連結されるラックを含む。駆動アセンブリは、上記ハンドルハウジング内に位置決めされ、そして上記ラックと係合可能であるつめを含む。トリガーが、上記ハンドルハウジング上に旋回可能に取り付けられる、そして調節可能な力制限機構が、上記駆動アセンブリの一部分に離脱可能に取り付けられる。この調節可能な力制限機構の一部分は、上記トリガー内の移動のために取り付けられる。この調節可能な力制限機構は、上記トリガーを上記駆動アセンブリに離脱可能に連結する。
【0011】
上記調節可能な力制限機構は、上記駆動アセンブリの一部分に連結された第1の端部および上記トリガー内に移動可能に取り付けられた第2の端部を有する連結ロッドを含む。上記調節可能な力制限機構はまた、上記トリガー内に、上記スプリングの第1の端部が上記連結ロッドの第2の端部と係合可能であるように取り付けられるように取り付けられるスプリングを含む。調節可能なねじが、上記トリガー内に、この調節可能なねじの回転が上記スプリング内の圧力を変えるように取り付けられる。1つの実施形態では、上記調節可能な力制限機構は、上記トリガー内に取り付けられ、そして上記スプリングと上記調節可能なねじとの間に位置決めされるブッシングを含む。
【0012】
1つの実施形態では、上記力制限機構は、上記アクチュエーターに取り付けられたキャリッジを含む。上記ハンドルアセンブリは、このキャリッジに旋回可能に連結されるつめを含むことが想定される。上記力制限機構は、上記アクチュエーターに滑動可能に連結されるプランジャーを含む。このプランジャーは、上記アクチュエーター内に少なくとも部分的に滑動可能に配置される。実施形態では、少なくとも1つのスプリングが、上記プランジャーと上記アクチュエーターとの間に配置される。上記キャリッジは、上記プランジャーを係合するための角度をなす表面を有することが想定される。上記プランジャーは、上記キャリッジの角度をなす表面を係合するための角度をなす面を含む。この角度をなす表面および角度をなす面は、上記キャリッジが上記ブランジャーを押し下げ得るように配列される。上記プランジャーは、所定の付勢力で上記キャリッジに向かって付勢される。
【0013】
ハンドルアセンブリによって端部エフェクターに付与される力の量を制御する方法がまた提供され、ハンドルハウジングおよびこのハンドルハウジング内に移動可能に取り付けられるラックを有するハンドルアセンブリを提供する工程を含む。駆動アセンブリが、このハンドルハウジング内に取り付けられ、そしてラックと係合可能である。トリガーが、このハンドルハウジング内に旋回可能に取り付けられ、そして力制限機構が、上記駆動アセンブリと上記トリガーとの間に、この力制限機構が上記トリガーを上記駆動アセンブリに離脱可能に連結するように配置される。この力制限機構の少なくとも一部分は、所定の力によって上記駆動アセンブリとの係合に押される。この力制限機構は、上記ラックに付与される所定量の力に応答して上記駆動アセンブリから離脱される。上記駆動アセンブリとの係合に押される力制限機構の一部分は、上記駆動アセンブリを係合するような形態であるスプリングで付勢されるプランジャーを含む。
【0014】
本発明により、さらに以下が提供される。
(項目1)作動する遠位端部分を有する外科用器具との使用のためのハンドルアセンブリであって:
ハンドルハウジング;
該ハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素;
該ハンドルハウジング内に位置決めされ、そして該駆動要素と係合可能であり、該ハンドルハウジング内で該駆動要素を移動させる駆動アセンブリ;
該ハンドルハウジング上に移動可能に取り付けられるアクチュエーター;および
該駆動アセンブリと該アクチュエーターとの間に配置される力制限機構であって、該アクチュエーターを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
(項目2)
前記力制限機構が連結ロッドを含み、該連結ロッドの第1の端部が前記駆動アセンブリに取り付けられ、そして該連結ロッドの第2の端部が前記アクチュエーター内に取り付けられる、項目1に記載のハンドルアセンブリ。
(項目3)
前記力制限機構が、前記アクチュエーター内に位置決めされ、そして前記連結ロッドの第2の端部に隣接するスプリングを含む、項目2に記載のハンドルアセンブリ。
(項目4)
前記力制限機構が、前記アクチュエーター内に位置決めされ、そして前記スプリングと係合可能であって該スプリング内の力を変動する、項目3に記載のハンドルアセンブリ。
(項目5)
前記連結ロッドが突出部を有し、そして前記駆動アセンブリが切り抜き部分を含み、該突出部が該切り抜き部分内に離脱可能に係合可能である、項目2に記載のハンドルアセンブリ。
(項目6)
前記駆動アセンブリが上部キャリアおよび下部キャリアを含み、該上部キャリアが前記連結ロッドの第1の端部に連結する、項目5に記載のハンドルアセンブリ。
(項目7)
前記駆動アセンブリの切り抜き部分が、前記連結ロッド上の突出部との離脱可能な係合のために前記下部キャリア中に含まれる、項目6に記載のハンドルアセンブリ。
(項目8)
前記連結ロッドが、前記駆動アセンブリが該連結ロッドから外れるとき前記下部キャリアの一部分を支持するための傾斜部材を有する、項目7に記載のハンドルアセンブリ。
(項目9)
前記下部キャリアが、前記ハンドルハウジング上に回転可能に取り付けられ、そして前記上部キャリア上の旋回点と第1の軸を規定する、項目8に記載のハンドルアセンブリ。
(項目10)
前記連結ロッドが、前記上部キャリア上の連結点と第2の軸を規定する、項目9に記載のハンドルアセンブリ。
(項目11)
前記第1の軸および第2の軸が、前記突出部が前記切り抜きと係合するとき実質的に平行である、項目10に記載のハンドルアセンブリ。
(項目12)
前記第1の軸および第2の軸が、前記突出部が前記切り抜きと係合しないとき実質的に平行でない、項目10に記載のハンドルアセンブリ。
(項目13)
前記下部キャリアが、前記切り抜きを含む少なくとも1つの可撓性アームを有する、項目12に記載のハンドルアセンブリ。
(項目14)
前記少なくとも1つの可撓性アームが、前記突出部が前記切り抜きから外れるとき前記下部キャリアに対して外方に可撓性である、項目13に記載のハンドルアセンブリ。
(項目15)
前記連結ロッドが傾斜部材を含み、そして該連結ロッド上の突出部が前記少なくとも1つの可撓性アーム上の切り抜きから外れるとき該少なくとも1つの可撓性アームが該傾斜部材上に静止する、項目14に記載のハンドルアセンブリ。
(項目16)
作動遠位端部分を有する外科用器具との使用のためのハンドルアセンブリであって:
ハンドルハウジング;
該ハンドルハウジング内に移動可能に取り付けられ、そして遠位端部分に連結されるラック;
該ハンドルハウジング内に位置決めされ、該ラックと係合可能であるつめを含む駆動アセンブリ;
該ハンドルハウジング上に旋回可能に取り付けられるトリガー;および
該駆動アセンブリの一部分に離脱可能に取り付けられ、そして該トリガー内の移動のために取り付けられた調節可能な力制限機構であって、該トリガーを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
(項目17)
前記調節可能な力制限機構が、前記駆動アセンブリの一部分に連結された第1の端部および前記トリガー内に移動可能に取り付けられた第2の端部を有する連結ロッドを含む、項目16に記載のハンドルアセンブリ。
(項目18)
前記調節可能な力制限機構が、前記トリガー内に、前記スプリングの第1の端部が前記連結ロッドの第2の端部と係合可能であるように取り付けられる、項目17に記載のハンドルアセンブリ。
(項目19)
前記調節可能な力制限機構が、前記トリガー内に、前記調節ねじの回転が該スプリング内の圧力を変えるように取り付けられる、項目18に記載のハンドルアセンブリ。
(項目20)
前記調節可能な力制限機構が、前記トリガー内に取り付けられたブッシングを含み、該ブッシングが前記スプリングと前記調節可能なねじとの間に位置決めされる、項目19に記載のハンドルアセンブリ。
(項目21)
作動遠位端部分を有する外科用器具との使用のためのハンドルアセンブリであって:
ハンドルハウジング;
該ハンドルハウジング内に移動可能に取り付けられ、そして手術を実施するために作動遠位部分に連結される駆動要素;
該ハンドルハウジング上に移動可能に取り付けられたアクチュエーター;および
該駆動要素と該アクチュエーターとの間に配置される力制限機構であって、離脱力を有する力制限機構;を備え、
該力制限機構が、該アクチュエーターに、該アクチュエーターに付与される力が該離脱力より小さいとき、該力制限機構が該アクチュエーターとともに移動するように、そして該アクチュエーターに付与される力が該離脱力と一致するとき、該力制限機構が該アクチュエーターに対して旋回するように、該アクチュエーターに付与される力が該離脱力より小さいとき、該力制限機構が該駆動要素に駆動力を付与する、ハンドルアセンブリ。
(項目22)
前記力制限機構が、下部キャリアを含む、項目21に記載のハンドルアセンブリ。
(項目23)
前記力制限機構が、前記アクチュエーターに連結され、そして前記下部キャリアに離脱可能に連結される、連結ロッドを含む、項目22に記載のハンドルアセンブリ。
(項目24)
前記連結ロッドが前記アクチュエーター中に滑動可能に配置され、そしてスプリングが該アクチュエーターと該連結ロッドとの間に位置決めされる、項目23に記載のハンドルアセンブリ。
(項目25)
前記下部キャリアが、前記アクチュエーターに旋回可能に連結される、項目24に記載のハンドルアセンブリ。
(項目26)
前記下部キャリアが上部キャリアに旋回可能に連結され、該上部キャリアが前記連結ロッドに旋回可能に連結される、項目25に記載のハンドルアセンブリ。
(項目27)
前記駆動要素が少なくとも1つの歯を有するラックを備え、そして該ラックとの係合のために前記力制限機構に旋回可能に連結されるつめをさらに備える、項目22に記載のハンドルアセンブリ。
(項目28)
前記力制限機構が、前記アクチュエーターと機械的に協動するキャリッジを含む、項目21に記載のハンドルアセンブリ。
(項目29)
前記キャリッジに旋回可能に連結されるつめをさらに備える、項目28に記載のハンドルアセンブリ。
(項目30)
前記力制限機構が、前記アクチュエーターに滑動可能に連結されるプランジャーを含む、項目29に記載のハンドルアセンブリ。
(項目31)
前記プランジャーが、前記アクチュエーター内に少なくとも部分的に滑動可能に配置される、項目30に記載のハンドルアセンブリ。
(項目32)
少なくとも1つのスプリングが、前記プランジャーと前記アクチュエーターとの間に配置される、項目31に記載のハンドルアセンブリ。
(項目33)
前記キャリッジが、前記プランジャーの少なくとも一部分を係合するための角度をなす表面を含む、項目30に記載のハンドルアセンブリ。
(項目34)
前記プランジャーが前記角度をなす表面を係合するための角度をなす面を含み、該角度をなす表面および角度をなす面が、前記キャリッジが該ブランジャーを押し下げ得るように配列される、項目33に記載のハンドルアセンブリ。
(項目35)
前記プランジャーが、所定量の力で前記キャリッジに向かって付勢される、項目34に記載のハンドルアセンブリ。
(項目36)
ハンドルアセンブリによって端部エフェクターに付与される力の最大量を制御する方法であって:
ハンドルハウジングを有するハンドルアセンブリ、該ハンドルハウジング内に移動可能に取り付けられたラック、該ハンドルハウジング内に取り付けられ、そして該ラックと係合可能である駆動アセンブリ、該ハンドルハウジング内に旋回可能に取り付けられたトリガー、および該駆動アセンブリと該トリガーとの間に置かれ、該トリガーを該駆動アセンブリに離脱可能に連結するクラッチ機構を提供する工程;
該クラッチ機構の少なくとも一部分を所定の力によって該駆動アセンブリとの係合に押す工程;および
該ラックに付与される所定量の力に応答して、該クラッチ機構を該駆動アセンブリから離脱する工程、を包含する、方法。
(項目37)
前記クラッチ機構の少なくとも一部分を押す工程が、該クラッチ機構と連結されるスプリングで付勢されるプランジャーを前記駆動アセンブリとの係合に押すことを含む、項目36に記載の方法。
【図面の簡単な説明】
【0015】
調節可能な力制限機構を組み込む本明細書に開示されるハンドルアセンブリの実施形態は、図面を参照して本明細書中に開示される。
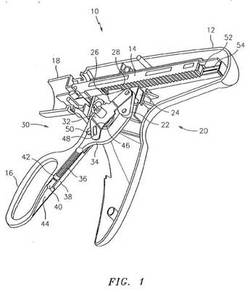
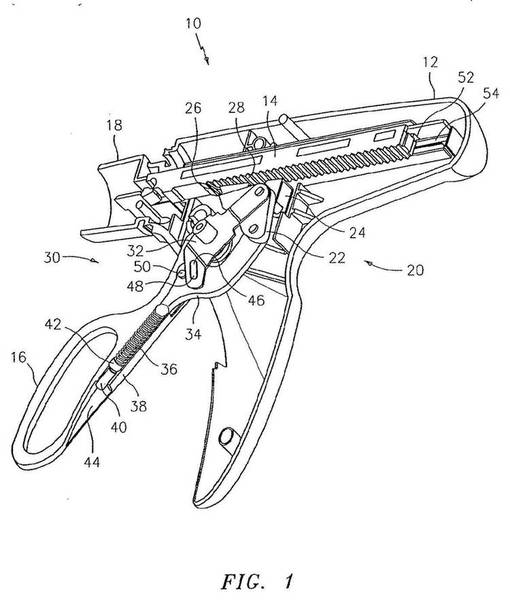
【図1】図1は、ハンドルハウジングの半分が除かれたハンドルアセンブリの斜視図である。
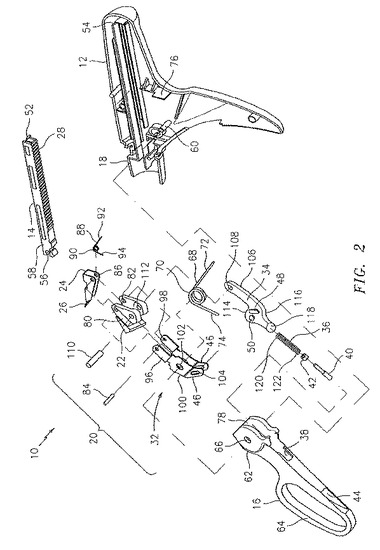
【図2】図2は、パーツが分離されたハンドルアセンブリの斜視図である。
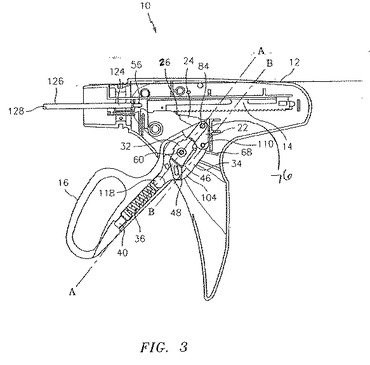
【図3】図3は、ハンドルハウジングの半分が除かれ、そして初期位置にあるハンドルアセンブリの側面図である。
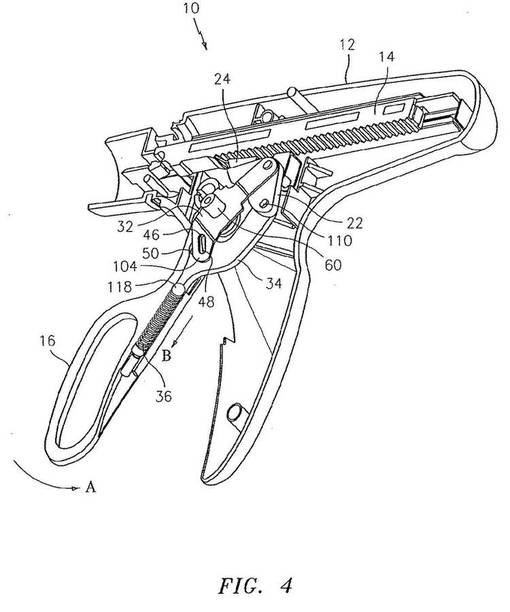
【図4】図4は、ハンドルアセンブリに関連する力制限機構の初期の不起動化の間のハンドルアセンブリの斜視図である。
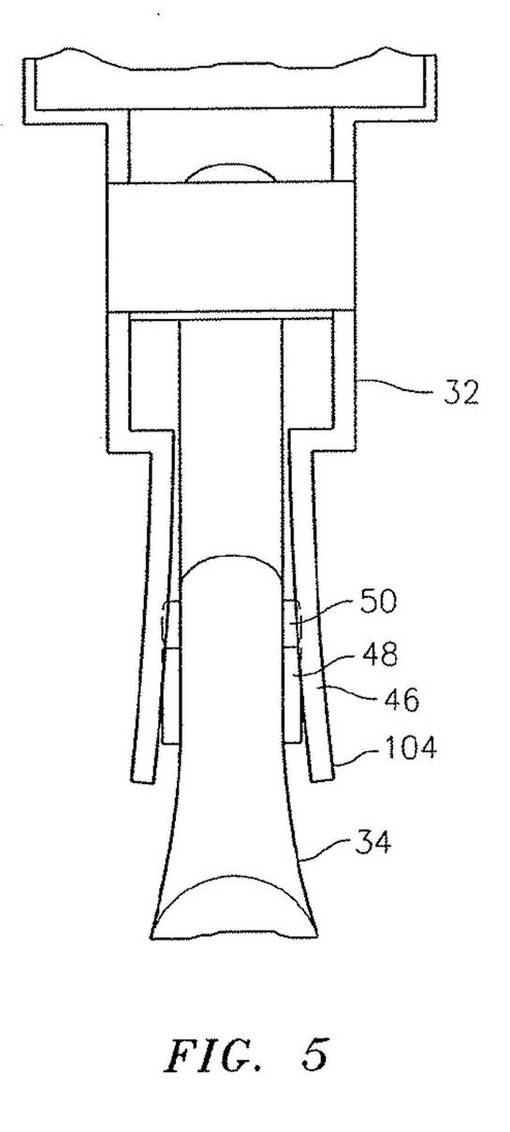
【図5】図5は、力制限機構が関連する駆動アセンブリから外れる間のハンドルアセンブリの力制限機構の端面図である。
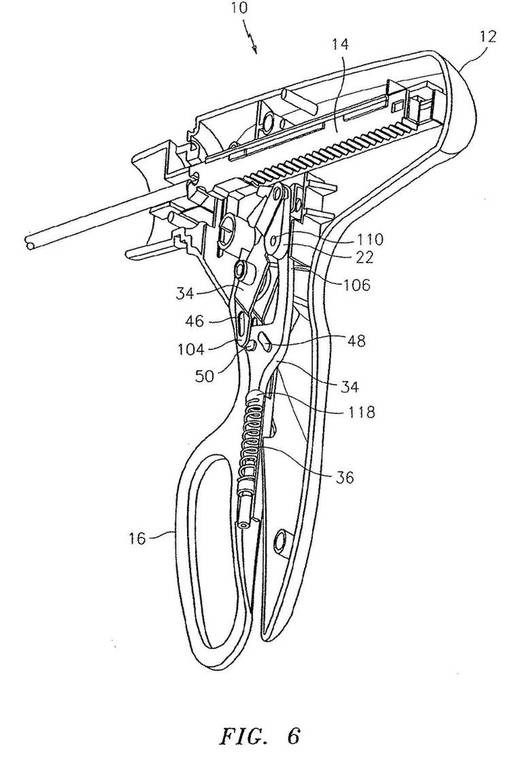
【図6】図6は、力制限機構構成要素が駆動アセンブリから外れたハンドルアセンブリの斜視図である。
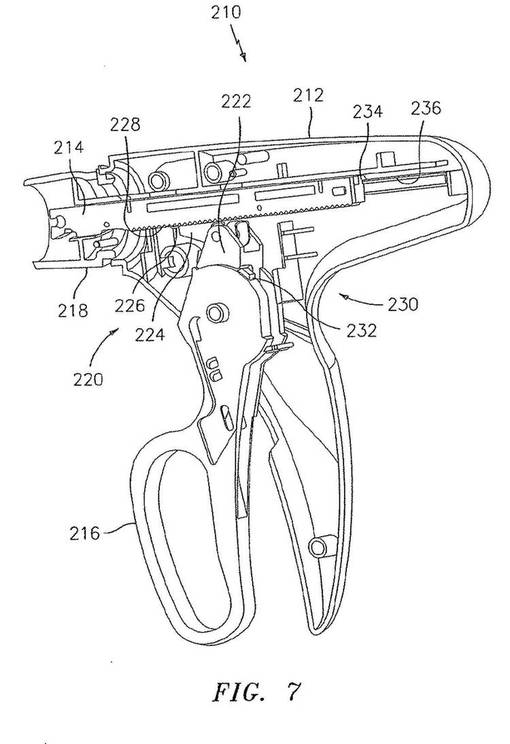
【図7】図7は、ハンドルハウジングの半分を除いた、力制限トリガースイッチを組み込むハンドルアセンブリの斜視図である。
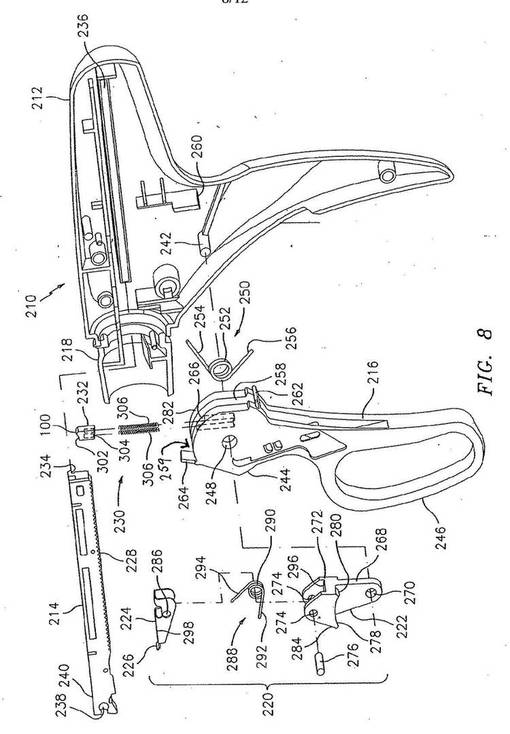
【図8】図8は、パーツを分離した、図7のハンドルアセンブリの斜視図である。
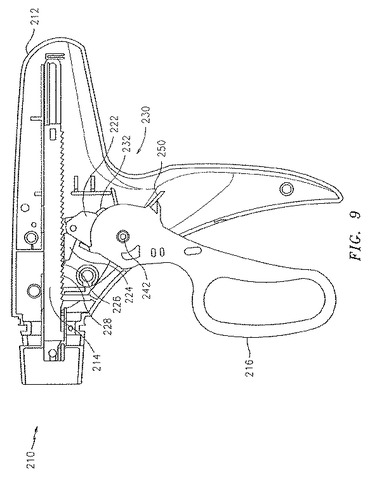
【図9】図9は、ハンドルハウジングの半分を除いた、初期の発射前状態にあるハンドルアセンブリの側面図である。
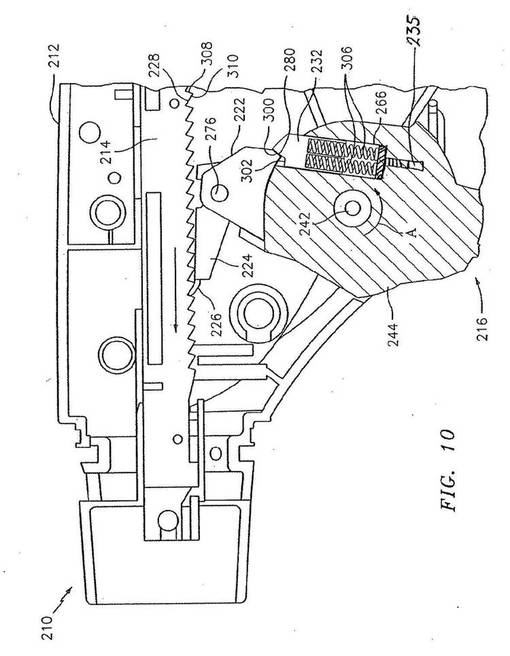
【図10】図10は、初期の起動された状態にある、ハンドルアセンブリの拡大側面図である。
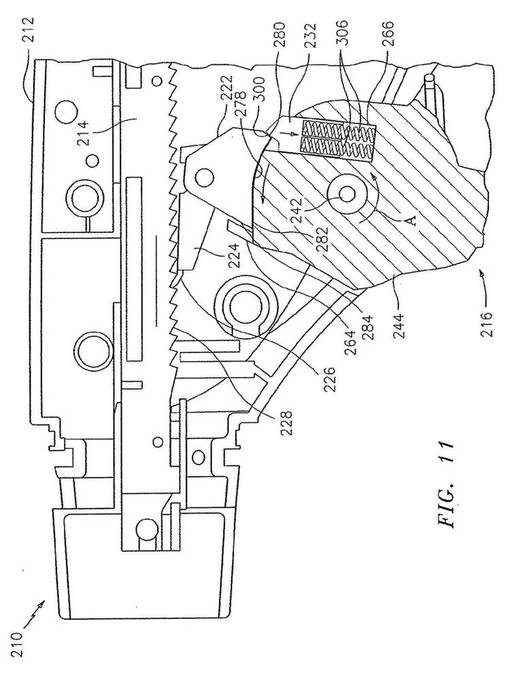
【図11】図11は、初期起動の間の、そして過負荷状態に遭遇するハンドルアセンブリの拡大側面図である。
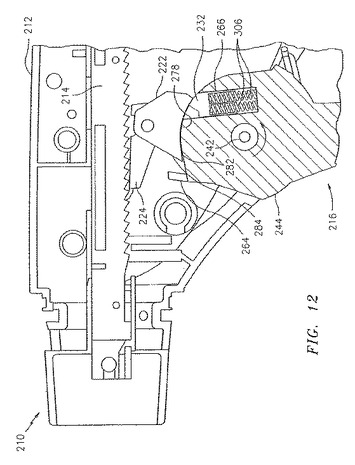
【図12】図12は、トリガーがハンドルアセンブリの駆動構成要素から外れた過負荷状態の間のハンドルアセンブリの拡大側面図である。
【発明を実施するための形態】
【0016】
(詳細な説明)
力制限ハンドル機構を組み込む本明細書に開示されるハンドルアセンブリの実施形態は、ここで、図面を参照して詳細に説明され、図面では、同様の番号は、いくつかの図面の各々で同一または対応する要素を指定する。当該技術分野で一般的であるように、用語「近位」は、使用者または操作者、例えば、外科医または医師により近いパーツまたは構成要素をいい、その一方、用語「遠位」は、使用者からより遠く離れたパーツまたは構成要素をいう。
【0017】
最初に図1を参照して、外科用器具との使用のためのハンドルアセンブリ10が開示される。ハンドルアセンブリ10は、調節可能な力制限機構(例えば、クラッチ)を組み込み、組織に付与される過剰の力を防ぎ、そして関連する端部エフェクターに存在する過負荷状態の事象においてハンドルアセンブリ10自体への損傷を防ぐ。ハンドルアセンブリ10は、外科用器具であって、その遠位端部分に、クリップまたはステープル付与装置のような端部エフェクターを組み込む外科用器具における使用に特に適切である。ハンドルアセンブリ10は、一般に、ハンドルハウジング12内の長軸方向軸移動のために取り付けられた細長い駆動ラック14を揺するハンドルハウジング12を含む。ハンドルアセンブリ10は、ハンドルハウジング12の半分のみとともに示されているが、完全および十分に機能的なハンドルアセンブリ10は、ハンドルハウジング12の2つの半分体を含む。ハンドルアンセブリ10はさらに、ハンドルハウジング12上に移動可能に取り付けられたアクチュエーターまたはトリガー16を含む。トリガー16の起動は、駆動ラック14をハンドルハウジング12内で長軸方向に移動させる。
【0018】
ハンドルハウジング12にはさらに、外科用器具の遠位端部分の回転可能な支持のためのジャーナル(軸受)鼻部分18が提供される。これは、外科用器具の遠位端部分と関連する端部エフェクターがハンドルアセンブリ10に対して回転されることを可能にする。
【0019】
駆動ラック14を移動させるために、ハンドルアセンブリ10は、駆動ラック14とトリガー16との間に位置決めされた駆動アセンブリ20を含む。駆動アセンブリ20は、操作者の手の一部分によるトリガー16によって付与された動きを、駆動ラック14に移し、駆動ラック14をハンドルハウジング12内で長軸方向に並進させ、そしてそれ故、関連する端部エフェクターを起動する。駆動アセンブリ20は、本明細書で以下により詳細に記載される様式で、トリガー16の起動に応答してハンドルハウジング12内でラック14を移動するための上部キャリア22およびつめ24を含む。詳細には、つめ24が、ラック14中に形成される歯28を係合するような形態である遠位リップ26とともに提供される。歯28は、遠位リップ26が歯28を係合し得、そしてつめ24が遠位方向に移動され、そしてつめ24が駆動ラック14に対して近位方向に引かれるにつれて駆動ラック14から外れるとき、駆動ラック14をハンドルハウジング12内で遠位方向に移動し得るように配向される。
【0020】
本明細書で上記で注記されたように、ハンドルアセンブリ10は、力制限機構30が、駆動アセンブリ20とトリガー16との間に存在する所定量の力に遭遇するとき、駆動アセンブリ20、そしてそれ故駆動ラック14からトリガー16を外すために提供される調節可能な力制限機構を含む。これは、端部エフェクターが、外科用器具の継続する作動がこの外科用器具または組織への損傷を生じるような十分に剛直性または頑健な材料に遭遇する状況で生じ得る。さらに、過剰の力の状態が関連する端部エフェクターへの損傷の事象で生じ得、それによって、駆動ラック14がハンドルハウジング12内で長軸方向に並進することを防ぐ。
【0021】
特定の実施形態では、上記過剰の力の状態の限界は、ハンドルアセンブリ10の形態化の間に、ハンドルアセンブリ10と関連する端部エフェクターが操作される組織に対する所定の力まで力が付与されるのみであるように予備設定され得る。これは、この関連する端部エフェクターが、組織に外科用クリップまたはステープルを付与するような形態であるときに所望され得る。一旦、この所定または予備設定された力に到達すると、力制限機構30は、トリガー16が駆動アセンブリ20から外れることを可能にし、それによって、組織に付与される力の過剰の量を防ぐ。
【0022】
力制限機構30は、一般に、これもまた駆動アセンブリ20のパーツを形成する下部キャリア32、および下部キャリア32および上部キャリア22と係合可能な連結ロッド34を含む。調節可能な力制限機構30は、さらに、トリガー16中のポケット38内に位置決めされる圧力スプリング36を含む。実施形態では、圧力スプリング36は、力制限機構30がその使用者にトリガー16の大きな力の不釣り合いおよび/または加速を制限または防ぐように係合されるとき、トリガー16に前進力付勢を供給する。圧力スプリング36はまた、連結ロッド34に圧力を付与し、そしてトリガー16内に位置する調節ねじ40により調節可能である。ブッシング42はまた、トリガー16内に位置決めされ、トリガーポケット38内で圧力スプリング36を支持する。ブッシング42は、調節ねじ40の受容のためにねじのある内面を、調節ねじ40の回転がブッシング42を移動し、圧力スプリング36中の圧力を増加または減少するように有する。トリガー16は、調節ねじ40への遠隔アクセスのための窓44を含み得、連結ロッド34に対して圧力スプリング36によって付与される圧力を調節する。
【0023】
上記で注記したように、下部キャリア32は、駆動アセンブリ20および調節可能な力制限機構30の両方の一部分を形成する。下部キャリア32は、駆動アセンブリ20が連結ロッド34、そしてそれ故トリガー16から外れることを可能にする。下部キャリア32は、連結ロッド34上に形成される1つ以上の突出部48と協動する1つ以上の切り抜きを含む。過剰圧力状態の間に、切り抜き46は、下部キャリア32が連結ロッド34から、本明細書で以下により詳細に記載される様式で突出部48から外方に張り出すことによって外れることを可能にする。傾斜部材(ランプ)が連結ロッド34上に提供され、下部キャリア32を、キャリア32が連結ロッド34から解放された後、外方に張り出すか、または傾斜する状態で維持する。下部キャリア32を、外方に張り出す状態で維持することにより、キャリア32は、連結ロッド34を再係合し得る。さらに傾斜部材50は、トリガー16が少なくとも部分的に解放されるとき、キャリア32への突出部48の再係合を容易にする。
【0024】
論議されるように、ラック14は、ハンドルハウジング12内の長軸方向移動のために取り付けられる。ラック14は、ハンドルハウジング12中に形成されたハウジングレール54に沿って載るラックリップ52を含む。
【0025】
ここで図2を参照して、ハンドルアセンブリ10は、外科用器具、特に、移動する端部エフェクターを組み込む細長い遠位端を有するタイプの器具との使用のための形態である。例えば、ハンドルアセンブリ10は、クリップまたはステープル付与外科用器具との使用のために特に適切である。ハンドルアセンブリ10中に調節可能な力制限機構30を含めることは、操作者が、外科用クリップもしくはステープルおよび/または圧縮される組織に端部エフェクターによって付与され得る力の最大量を予備設定することを可能にする。代表的なクリップ付与装置は、ハンドルアセンブリ10からの動きをクリップ付与外科用器具の端部エフェクターまたは顎に移す駆動ロッドを含む。この駆動ロッドを収容するために、ハンドルアセンブリ10のラック14は、ラック14の遠位端58中に形成されるソケット56を含む。ソケット56は、ラック14が駆動ロッドに、ラック14が駆動ロッドを外科用器具の関連する遠位端部分内で長軸方向に移動し得るように連結されることを可能にする。ソケット56はまた、外科用器具の遠位端部分がハンドルアセンブリ10に対して回転されるとき、駆動ロッドがソケット56内で回転することを可能にする。
【0026】
トリガー16をハンドルアセンブリ12に取り付けるために、ハンドルアセンブリ12には、取り付けポスト60が提供される。トリガー16は、本体部分62、および本体部分62から垂れ下がるフィンガーグリップ部分64を含む。本体部分62は、取り付けポスト60上に適合する旋回穴66を含み、そしてトリガー16がハンドルハウジング12に対して旋回することを可能にする。ねじれスプリング68が提供され、トリガー16をハンドルハウジング12に対して開放位置に付勢する。ねじれスプリング68は、中央部分70、第1のアーム72および第2のアーム74を含む。中央部分70は、トリガー16の本体部分62内、そして取り付けポスト60上に適合する。ねじれスプリング68の第1のアーム72は、ハンドルハウジング12上に形成されたハウジング壁76と係合し、その一方、第2のアーム74は、本体部分62の内面78と係合する。
【0027】
本明細書中で上記に注記したように、駆動アセンブリ20は、一般に、上部キャリア22、つめ24および下部キャリア32を含む。上部キャリア22は、下部キャリア32の一部分の受容のための一対の溝またはスロット80を含む。ピン穴80が、ピン84の受容のために上部キャリア22中に提供され、上部キャリア22を、つめ24に連結し、そして上部キャリア22を下部キャリア32に固定する。つめ24は、ピン84の受容のために一対の旋回穴86を含み、つめ24を上部キャリア22に旋回可能に連結する。つめ24を上方にラック14との係合に付勢するため、駆動アセンブリ20は、ねじれスプリング88わ含む。ねじれスプリング88は、中央部分90、第1のアーム92および第2のアーム94を含む。中央部分90は、旋回穴86間に適合し、そしてピン84上に取り付ける。第1のアーム92は、つめ24の内側面(図示せず)と係合し、その一方、第2のアーム94は、上部キャリア22の内面(図示せず)と係合する。
【0028】
下部キャリア32は、ほぼU形状の部材として形成され、そして上部キャリア22中のスロット80内に適合する一対の上部アーム96を含む。上部アーム96は、ピン84の受容のために上部キャリア22中のピン穴82と整列する取り付け穴98を含み、下部キャリア32を上部キャリア22に固定する。下部キャリア32は、取り付けポスト60上に下部キャリア32を回転可能に取り付けるために提供される旋回穴102を有する中央部分100をさらに含む。組み立てられるとき、下部キャリア32は、トリガー16の本体部分62内に、ねじれスプリング68が下部キャリア32中の取り付け穴102間に位置決めされるように適合する。下部キャリア32は、連結ロッド34上の突出部48上に適合するような形態である一対の切り抜き46を取り込む。切り抜き46は、下部キャリア32中の下部アーム104中に形成される。下部アーム104は、中央部分100および連結ロッド34に対して、下部アーム104が連結ロッド34中の突出部48上で切り抜き46を通過するように屈曲または外方に傾斜し得るように十分に可撓性であり得る。この様にして、ハンドルアセンブリ10が上記で注記された過剰の力状態に遭遇するとき、下部アーム104は連結ロッド34から外される。
【0029】
ハンドルアセンブリ10は、過剰の力状態の存在の間に、駆動アセンブリ20からトリガー16を外し得る力制限機構30を含む。力制限機構30は、操作者が、トリガー16が駆動アセンブリ20から外されることを引き起こす正確な量の力「離脱力」を予備設定し得るように調節可能である。調節可能な力制限機構30は、一般に、連結ロッド34、スプリング36、ならびに、ブッシング42および調節ねじ40を含む。連結ロッド34は、ピン110の受容のための旋回穴108を有する上部アーム106を含む。ピン110は、連結ロッド34の上部アーム106を上部キャリア22に連結する。詳細には、上部キャリア22は、ピン110の受容のための一対の取り付け穴112を含み、上部キャリア22を連結ロッド34と旋回して連結する。
【0030】
連結ロッド34は、その上に少なくとも1つの突出部48が位置される中央部分114、および本明細書中以下でより詳細に記載される様式で下部キャリア32に連結ロッド34を連結および脱連結し得る少なくとも1つの傾斜部材50を含む。連結ロッド34は、ボール端部118で終結する下部アーム116をさらに含む。下部アーム116の一部分およびボール端部118は、トリガー16中に形成されたポケット38中に、連結ロッド34がポケット38内の移動が拘束されるように延びる。ボール端部118は、スプリング36の第1の端部120に対し、スプリング36が連結ロッド34に上方圧力を提供するように静止するような形態である。スプリング36の第2の端部122は、ブッシング42および調節ねじ40を受容するような形態である。調節ねじ40の回転は、ブッシング42がスプリング36内の圧縮を増加または減少させる。
【0031】
ここで、図3〜6を参照し、そしてはじめに図3について、調節可能な力制限機構30を組み込むハンドルアセンブリ10の作動が説明される。上記で注記したように、ハンドルアセンブリ10は、種々の外科用器具における使用のための形態である。力制限機構30の調節可能な性質に起因して、ハンドルアセンブリ10は、クリップ付与機構、ステープル付与機構、顎移動機構などに付与される力を制限するためのクリップまたはステープル付与外科用器具における使用のために特に適している。初期位置では、トリガー16は、ハンドルアセンブリ12に対し、ねじれスプリング68によって開放位置に付勢される。つめ24は壁76を打ち、その結果、つめ24はラック14から外れる。クリップまたはステープル付与部分の遠位端にアセンブルされるとき、クリップまたはステープル付与遠位端の発射ロッド126は、ハンドルアセンブリ10に取り付けられる。詳細には、発射ロッド126の近位端124は、ラック14上のソケット56内に取り付けられ得る。発射ロッド126の遠位端128は、外科用器具のクリップ付与遠位端部分と関連するクリップまたはステープル付与および供給機構まで延びる。
【0032】
示されるように、初期位置では、軸A−Aは、取り付けポスト60と、上部キャリア22を下部キャリア32に連結するピン84を通って規定される。第2の軸B−Bは、連結ロッド34、および連結ロッド34を上部キャリア22に連結するピン110をほぼ通って規定される。連結ロッド34は、ピン110の周りで上部キャリア22に対して旋回し得ることが注目されるべきである。スプリング36は、連結ロッド34のボール端部118に対して圧力を奏する。上記で注記されるように、使用の前に、外科医または製造業者は、調節ねじ40の使用により、「離脱力」を予備設定し得る。作動状態では、連結ロッド34の少なくとも1つの突出部48は、下部キャリア32の下部アーム104中のスロット46内に堅く着座される。代表的な作動では、ハンドル16のハンドルアセンブリ12に対する移動は、下部キャリア32、連結ロッド34および上部キャリア22を、単一の連結されたユニットとして取り付けポスト60の周りで旋回させる。取り付けポスト60の周りの上部キャリア22の旋回は、つめ24を壁76から離して動かし、その結果、つめ24は、ラック14からの係合に旋回する。つめ24は、ハンドル16によって遠位方向に駆動され、ラック14をハンドルアセンブリ12内で遠位方向に進行し、それによって、発射ロッド126を移動して外科用器具の遠位端部分と関連する1つ以上の機能を起動する。
【0033】
ここで図4を参照して、ハンドルアセンブリ10は、トリガー16が矢印Aの方向に旋回された初期起動状態で示される。ラック14がハンドルハウジング12内で遠位方向にもはや並進できないような外科用器具の遠位端部分における状況が生じるとき、つめ24は、遠位移動が妨げられ、それによって、上部キャリア22および下部キャリア32が、取り付けポスト60に対して旋回することを防ぐ。代替例では、ハンドルで付与された力が所定の閾値に到達したときに状況が生じる。
【0034】
ここで図4および5を参照して、矢印Aの方向にトリガー16に対して継続される力が奏されるとき、連結ロッド34は、下部キャリア32に対して取り付けポスト60の周りで旋回を継続するように試みる。連結ロッド34はピン110で上部キャリア22に対して旋回が固定されているので、連結ロッド34は、スプリング36の力に対して矢印Bの方向に下方に駆動される。図3に示される軸A−AおよびB−Bは、互いに対して回転し始める。連結ロッド34のキャリア32に対する下方への移動は、下部アーム104を押して、スロット46が連結ロッド34中の突出部48から離れて持ち上がるように曲げるか、または傾斜する。スロット46が突出部48から外れ、この連結ロッド34は、下部キャリア32に対して旋回し得る。突出部48が下部アーム104中のスロット46から完全に離れるようになるとき、連結ロッド34は、下部キャリア32から外れる。トリガー16は、図6に最も良く示されるように、完全に閉じられた位置まで旋回し続け得る。
【0035】
図6に示されるように、下部アーム104は、連結ロッド34上の傾斜部材50の存在によって連結ロッド34に対して外方に曲がった状態に維持される。一旦、力制限機構32によって遭遇される力が「離脱力」から減少すると、トリガー16は、ねじれスプリング68および/またはスプリング36の付勢に起因して開放位置まで戻り得る。トリガー16がこの開放位置に戻ると、傾斜部材50によって外方に曲がった状態に維持されている下部アーム104は、連結ロッド34上で、スロット46が連結ロッド34上の突出部48を再係合するようにリセットするようにされる。この移動は、ハンドルアセンブリ10を、図3に示されるような初期作動位置に戻す。
【0036】
それ故、調節可能力制限機構30を組み込むハンドルアセンブリ10は、外科用器具の遠位端部分を起動するために安全に用いられ得、その一方、この器具の遠位端が組織/または器具パーツに対して過剰の力(すなわち、「離脱力」)を超えることを防ぎ、そしてそれによって、組織およびこの器具自体に対する損傷を防ぐ。
【0037】
ここで図7〜12を参照して、外科用器具との使用のためのハンドルアセンブリ210が開示される。ハンドルアセンブリ210は、力制限機構230を組み込み、組織に付与される過剰の力を防ぎ、そして関連する端部エフェクターに存在する過負荷状態の事象におけるハンドルアセンブリ210への損傷を防ぐ。ハンドルアセンブリ210は、一般に、ハンドルハウジング212内の長軸方向移動のために取り付けられた細長い駆動ラック214を囲むハンドルハウジング212を含む。ハンドルアセンブリ210は、ハンドルハウジング212の半分のみが見えるように示されているが、当業者は、完全または十分に機能的なハンドルアセンブリ210は、ハンドルハウジング212の両方の半分体を含むことを認識する。ハンドルアセンブリ210は、ハンドルハウジング212上に移動可能に取り付けられたトリガー216をさらに含む。トリガー216の起動は、駆動ラック214を、ハンドルハウジング212内で長軸方向に移動させる。
【0038】
ハンドルハウジング212には、外科用器具の遠位端部分の回転可能な支持のためのジャーナル鼻部分218がさらに提供される。これは、この外科用器具の遠位端部分と関連する端部エフェクターが、ハンドルアセンブリ210に対して回転されることを可能にする。
【0039】
駆動ラック214を移動するために、ハンドルアセンブリ210は、駆動ラック214とトリガー216との間に位置決めされる駆動アセンブリ220を含む。駆動アセンブリ220は、操作者の手によってトリガー216に付与される動きを駆動ラック214に移し、駆動ラック214をハンドルハウジング212内で長軸方向に並進し、そしてそれ故、関連する端部エフェクターを起動する。駆動アセンブリ220は、トリガー216との移動のために取り付けられるキャリッジ222を含む。つめ224は、キャリッジ222に旋回して連結され、そして駆動ラック214がハンドルハウジング212内で移動するように係合するために提供される。詳細には、つめ224には、駆動ラック214上に提供される歯228を係合するような形態である遠位リップ226が提供される。つめ224は、スプリングで付勢されて駆動ラック214との係合に付勢される。本明細書で以下に注記されるように、歯228は、遠位リップ226が歯228を係合し得、そしてつめ224が遠位方向に移動され、そしてつめ224が駆動ラック214に対して近位方向に引かれるとき駆動ラック214から外れるとき、駆動ラック214をハンドルハウジング212内で遠位方向に移動するように配向される。
【0040】
本明細書で上記に注記されるように、ハンドルアセンブリ210は、力制限機構230が、駆動アセンブリ220とトリガー216との間に存在する所定量の力に遭遇するとき、駆動アセンブリ220、そしてそれ故駆動ラック214からトリガー216を外すために提供される力制限機構230を含む。これは、端部エフェクターが、外科用器具の継続する作動がこの外科用器具または組織への損傷を生じるような十分に剛直性または頑健な材料に遭遇する状況で生じ得る。さらに、過剰の力の状態が関連する端部エフェクターへの損傷の事象で生じ得、それによって、駆動ラック214がハンドルハウジング212内で長軸方向に並進することを防ぐ。
【0041】
特定の実施形態では、上記過剰の力の状態は、ハンドルアセンブリ210の形態化の間に、ハンドルアセンブリ210と関連する端部エフェクターが操作される組織に対する所定の力まで力が付与されるのみであるように予備設定され得る。一旦、この所定の力に到達すると、力制限機構230は、トリガー216が駆動アセンブリ120から外れることを可能にし、それによって、組織に付与される力の過剰の量を防ぐ。
【0042】
力制限機構230は、トリガー216上に移動可能に取り付けられるプランジャー232を含む。プランジャー232は、キャリッジ222を係合し、そしてトリガー216の運動をキャリッジ222、そしてそれ故つめ224に移すような形態であり、ハンドルハウジング212内でラック214を並進する。力制限機構230は、キャリッジ222とプランジャー232との間に存在する所定の力に応答してキャリッジ222からプランジャー232を外すことにより、キャリッジ222からトリガー216を外すように作動する。
【0043】
上記で注記したように、ラック214は、ハンドルハウジング212内の長軸方向移動のために取り付けられる。ラック214は、ハンドルハウジング212上に提供される長軸方向のハウジングレール236に沿って載るラックリップ234を含む。ラック214は、ハウジングレール236に沿って移動するとして開示されているけれども、ハンドルハウジング212内の長軸方向移動のための支持ラック214のその他の手段が、それに代わって提供され得、例えば、溝、トラック、またはハンドルハウジング212内の移動のためにラック214を長軸方向に支持するその他の方法などである。
【0044】
図8を参照して、ハンドルアセンブリ210の構成要素が詳細に説明される。上記で注記したように、ハンドルアセンブリ210は、移動可能な端部エフェクターを組み込む種々の外科用器具の遠位端セクションとの使用のための形態である。ハンドルアセンブリ210のラック214には、ラック214の遠位端240上に形成されたソケット238が提供される。ソケット238は、外科用器具の遠位端構成要素と関連する駆動または運動ロッドを受容するような形態であり得る。ラック214は、ソケット238を有するとして示されているけれども、ラック214を外科用器具の遠位端の移動可能な構成要素に連結するその他の手段もまた、本明細書中で企図される。
【0045】
トリガー216がハンドルハウジング212に対して移動するようにするため、ハンドルハウジング212には、本明細書中で以下により詳細に説明される様式でトリガー216およびキャリッジ222の両方のための旋回点として供される取り付けポスト242が提供される。トリガー216には、本体部分244、および本体部分244から垂れ下がる開放フィンガー部分246が提供される。本体部分244は、ハンドルハウジング212上の取り付けポスト242上に適合する旋回穴248を含む。ねじれスプリング250が、ハンドルハウジング212とトリガー216との間に提供され、トリガー216を最遠位または開放位置に付勢する。ねじれスプリング250は、中央部分252、第1のアーム254および第2のアーム256を含む。ねじれスプリング250は、トリガー216の本体部分244中に形成された中央スロットまたは腔258内に適合する。中央部分252は取り付けポスト242上に適合し、そして第1のアーム254は、ハンドルハウジング212に形成されたハウジング壁260に対して静止する。ねじれスプリング250の第2のアーム256は、本体部分244上に形成された近位タブ262と係合し、トリガー216を開放位置に付勢する。
【0046】
トリガー216の本体部分244は、キャリッジ222との係合のための前方タブ264をさらに含み、キャリッジ222をラック214に対して近位方向に移動する。本体部分244は、プランジャー232の受容のためのプランジャーポケット266をさらに含み、本明細書中で以下により詳細に説明される様式で、プランジャー232がキャリッジ222との係合に出入りすることを可能にする。
【0047】
図8を参照して、キャリッジ222は、一般に、取り付け穴270を有する下部部分268を含む。下部部分268は、トリガー216中に形成された腔258内に、取り付け穴270が取り付けポスト242上に適合するように適合する。それ故、キャリッジ222は、トリガー216の本体部分244と共通の軸の周りに旋回する。キャリッジ222は、一対の取り付け穴274を有する部分的に切片にされたか、または分割上部部分272をさらに含む。旋回ピン276は、取り付け穴274を通って提供され、つめ224をキャリッジ222に取り付ける。これは、つめ224がキャリッジ222の移動によって長軸方向に駆動されることを可能にし、そしてつめ224がキャリッジ222に対して旋回することを可能にする。
【0048】
キャリッジ222は、力制限機構230がトリガー216をキャリッジ222から外すとき、トリガー216がキャリッジ222に対して旋回し得るように、アンダーカットまたは弧状面278をさらに含む。キャリッジ222には、力制限機構230のプランジャー232上の対応する面を離脱可能に係合するような形態である角度をなす面280が提供される。トリガー216には、トリガー216がキャリッジ222とは独立に旋回し得るように対応する弧状面282が提供される。キャリッジ222の上部部分272は、トリガー216の解放に応答してキャリッジ222を時計方向に回転するようにスロット258の前方エッジ259によって係合される先導エッジ284を含み、そしてそれ故、つめ224をハンドルハウジング212内で近位方向に引く。
【0049】
つめ224は、ほぼU形状または一対の取り付け穴286を有するサドル部材として形成される。つめ224は、取り付け穴286を通るピン276の挿入によってキャリッジ222に旋回して連結される。駆動アセンブリ220は、つめ224をラック214との係合に付勢するためにねじれスプリング288をさらに含む。詳細には、ねじれスプリング288は、中央部分290せ、第1のアーム292および第2のアーム294を含む。中央部分290は、ピン276の上に適合し、そしてそれによって支持される、そして第1のアーム292は、キャリッジ222上に形成された面296に対して静止する。第2のアーム294は、つめ224の下側つめ面298と係合し、つめ224をラック214との係合に上方に付勢する。
【0050】
本明細書で上記に注記したように、ハンドルアセンブリ210は、ラック214の移動する能力がないことを含む因子に起因して駆動アセンブリ220が移動することを妨げられるとき、トリガー216が駆動アセンブリ220から外されることを可能にする力制限機構230を組み込む。力制限機構230は、一般に、プランジャー232、およびプランジャーポケット266内で、かつプランジャー232の下に位置される一対のスプリング306を含み、プランジャー232をキャリッジ222との係合に上方に付勢する。
【0051】
図10を参照して、プランジャー232は、キャリッジ222上の角度をなす面280を係合するような形態である角度のある表面300を含む。角度をなす表面300の角度をなす面280との係合は、トリガー216が起動されるとき、トリガー216がキャリッジ222に連結され、そしてキャリッジ222を旋回することを可能にする。示されるように、プランジャー232は、キャリッジ222の弧状面278に対して静止し、そしてプランジャー232がプランジャーポケット266およびトリガー216から跳ねることを防ぐ比較的平坦な面302をさらに含む。1つの実施形態では、プランジャー232には、スプリング306の一部分を受容するためにプランジャーポケット304が形成される(図8)。
【0052】
プランジャー232がキャリッジ222から外れるようにプランジャー232によって遭遇される力の量は、少なくとも2つの異なる様式で予備設定され得る。第1には、角度をなす面280および角度をなす表面300は、それらの間で所定の摩擦係数を規定するように形成され得る。これは、一部、角度をなす表面300が角度をなす面280に対して滑るために必要な力の量を決定し、そしてプランジャー232がプランジャーポケット266内で下方に押され、そしてキャリッジ222から外れることを可能にする。第2に、スプリング306の力は、プランジャーポケット266内でプランジャー232を下方に押すために必要な力を決定するように選択され得、そしてそれによって、プランジャー232をキャリッジ222から外す。角度をなす表面300と角度をなす面280との角度は、所定量の力に影響するように選択され得る。力制限機構230は2つのスプリング306を利用するとして示されているけれども、任意の数のスプリング、およびその他の形態のスプリングが、プランジャー232をキャリッジ222との係合に押すために利用され得ることが注目されるべきである。第3に、調節スプリング235(図10)が、スプリング力の調節を容易にするために含められ得る。
【0053】
ここで図9〜12を参照し、そして最初に図9に関して、ハンドルハウジング212でラック214を進行するためのハンドルアセンブリ10の作動が説明される。示されるように、初期位置では、ラック214は、ハンドルハウジング212内で最近位位置にある、そしてトリガー216は、ねじれスプリング250によって開放または最遠位位置まで付勢される。力制限機構230のプランジャー232は、キャリッジ222と係合され、キャリッジ222がトリガー216との取り付けポスト242上で共通軸の周りで旋回することを可能にする。つめ224は、ねじれスプリング288(図8)の付勢に起因して上方に押され、つめ224の遠位リップ226をラック214の歯228との係合に押す。
【0054】
ここで図10を参照して、トリガー216が握り締められるか、またはハンドルハウジング212に対して近位方向に移動されるとき、トリガー216の本体部分244は、取り付けポスト242の周りで半時計様式で回転する。キャリッジ222は、本体部分244と共通して取り付けポスト242の周りで旋回する。本明細書中で上記に注記したように、キャリッジ222の角度をなす面280は、プランジャー232の角度をなす表面300と係合しており、キャリッジ222とトリガー216との間の連結を維持する。キャリッジ222が取り付けポスト242の周りで旋回するとき、それは、つめ224を遠位方向に駆動し、それによって歯228との遠位リップ226の係合に応答してラック214を遠位方向に駆動する。
【0055】
ラックおよびつめ係合システムと共通しているように、ラック歯228は、歯224の遠位リップ226と係合されるような形態である比較的平坦な駆動面308を、つめ224がラック214を長軸方向に駆動し得るように含む。ラック歯228は、角度をなすか、または傾斜した表面310をさらに含む。傾斜した表面310は、つめ224がラック214に対して近位方向に、遠位リップ226が角度をなす表面310の上に載り、そしてねじれスプリング288の付勢に対して下方に移動するように移動することを可能にする。これは、トリガー216が駆動ラック214をより遠くの量で遠位方向に再び起動され得るように、つめ224が新たな位置に近位方向に戻って引かれることを可能にする。
【0056】
ここで図11を参照して、本明細書で上記に注記したように、ハンドルアセンブリ210には、ハンドルアセンフリ210と関連する端部エフェクターによって組織に付与される過剰な力に起因する組織への損傷を防ぎ、そして外科用器具の構成要素が使用の間に損傷されるようになる場合、ハンドルアセンフリ210および関連する端部エフェクターへの損傷を防ぐ力制限機構230が提供される。これは、ラック214がハンドルアセンフリ212内の遠位方向運動に対して過剰の抵抗に遭遇するとき起こる。これが起こるとき、ラック214によって遭遇される抵抗力は、つめ224を通じてキャリッジ222に伝達される。キャリッジ222によって遭遇される抵抗性が所定量に上昇するとき、プランジャー232の角度をなす表面300は、キャリッジ222の角度をなす面280に対して滑り始める。プランジャー232は、プランジャーポケット266内でスプリング306の付勢に抗して下方に押される。本明細書で上記に注記したように、ポケット166内でプランジャー232を下方に移動するために必要な力は、スプリング306(単数または複数)に対してほぼ下方に作用する摩擦成分であるキャリッジ222の角度をなす面280と、プランジャー232の角度をなす表面300であって、そしてスプリング306中に存在する所定の抵抗力との間に存在する摩擦係数によって決定される。示されるように、プランジャー232がプランジャーポケット266内で下方に移動するとき、トリガー216の本体部分は、反時計方向に回転し続け、本体部分244の前方タブ264をキャリッジ222の先導エッジ284から分離する。キャリッジ222の弧状面278は、本体部分244の弧状面282とほぼ同じ半径を有するので、トリガー216は取り付けポスト242の周りで旋回を継続し得、その一方、キャリッジ222は静止したままである。ハンドルアセンフリ210は、力制限機構230がトリガー216を解放するとき、ラック214の位置を維持するためのストップまたはその他の機構を含み得る。
【0057】
図12に最も良く示されるように、一旦、プランジャー232がプランジャーポケット266内で完全に下方に移動すると、プランジャー232はキャリッジ222から外され、それ故、トリガー216の本体部分244を、キャリッジ222、そしてそれ故つめ224およびラック214に任意の力を与えることなく自由に回転する。この実施形態では詳細に示されていないけれども、ねじれスプリング250(図8)の付勢に対するトリガー216の解放に際し、本体部分244は時計方向に回転し、本体部分244の前方スロット254をキャリッジ222の先導エッジ284と係合される。これは、トリガー216がキャリッジ222、そしてそれ故つめ224を、ラック214に対して近位方向に駆動するようにし、トリガー216のさらなる起動のためにリセットする。
【0058】
このようにして、力制限機構230は、ハンドルアセンブリ210が起動され、そして組織、またはハンドルアセンブリ210および関連する遠位端部分からなる外科用器具の内部構成要素への損傷なくして関連する遠位端エフェクターを作動するようにする。スプリング306のために適切な強度を選択すること、および/または角度をなす面280と角度をなす表面300について所定の摩擦係数および角度を設計することによって、組織、およびハンドルアセンフリ210の内部構成要素に付与される最大の力が予備決定され得る。
【0059】
本明細書に開示される実施形態に種々の改変がなされ得ることが理解される。例えば、示されるコイルスプリングに代えて異なるタイプのスプリングが置換され得、上記開示されるクラッチ機構を駆動アセンブリに付勢する。さらに、この開示されるクラッチ構成要素の組成および配向は、異なる様式で駆動アセンブリを係合するように改変され得る。さに、開示される駆動アセンブリは、必ずしもラックおよびつめシステムを含む必要はなく、例えば、ギア、モーター駆動システムなどのようなその他の駆動システムに置換され得る。上記力制限機構は、力制限機構のための閾値力を調節するための調節機構を含み得る。この力制限機構は、把持器、クリップ分与器、ステープラー、エネルギーを組織に付与するための外科用器具、またはその他の器具のためのハンドルアセンブリに提供され得る。従って、上記の記載は、制限的であると解釈されるべきではなく、特定の実施形態の単なる例示である。当業者は、本明細書に添付した請求項の範囲および思想内でその他の改変を想定する。
【0060】
(要約)
作動遠位端部分を有する外科用器具との使用のための安全ハンドルアセンブリが開示される。このハンドルアセンブリは、ハンドルハウジング、およびこのハンドルハウジング内に移動可能に取り付けられ、そして関連する作動遠位端部分に連結される駆動要素を含む。駆動アセンブリは、上記ハンドルハウジング内に位置決めされ、そして上記駆動要素と係合可能であり、この駆動要素をハンドルハウジング内で移動する。アクチュエーターがこのハンドルハウジング上に移動可能に取り付けられ、そして調節可能な力制限機構が上記駆動アセンブリとアクチュエーターとの間に配置される。力制限機構は、上記アクチュエーターを駆動アセンブリに離脱可能に連結する。この力制限機構は、上記アクチュエーターが、上記駆動アセンブリから分離または離れる力を予備設定するように調節可能である。
【符号の説明】
【0061】
10 ハンドルアセンブリ
12 ハンドルハウジング
14 駆動ラック
16 トリガー
18 ジャーナル鼻部分
20 駆動アセンブリ
22 上部キャリア
24 つめ
26 遠位リップ
28 歯
30 力制限機構
32 下部キャリア
34 連結ロッド
36 圧力スプリング
38 ポケット
40 調節ねじ
42 ブッシング
44 窓
46 切り抜き
48 突出部
50 傾斜部材
52 ラックリップ
54 ハウジングレール
【技術分野】
【0001】
(背景)
(技術分野)
本開示は、外科用器具との使用のための方法およびハンドルに関する。より詳細には、本開示は、遠位端エフェクターを有する外科用器具との使用のための力制限機構を取り込む方法およびハンドルアセンブリに関する。
【背景技術】
【0002】
(関連技術の背景)
種々の器具が、組織を操作するために外科用手順の間に用いられる。これら器具のいくつかは、力を組織に適用される端部エフェクターに伝達するために提供されるハンドルアセンブリを取り込む。例えば、いくつかの外科用器具は、種々の組織を把持するか、または切断するために遠位端上に一対の顎が提供され得る。ハンドルアセンブリの作動は、このハンドルアセンブリと連結されるトリガー機構からの力をこれらの顎に伝達し、そしてそれ故、組織に伝達することによってこれらの顎を開閉する。その他のタイプの外科用器具は、ステープル、クリップ、またはその他のファスナーを組織に付与するような形態である端部エフェクターを適用するファスナーが提供され得る。これらのタイプの外科用器具と連結されるハンドルアセンブリの作動は、組織を通って、そして/または組織中にステープルを駆動するように機能するか、または外科用クリップを組織の周りで、ハンドルアセンブリからの力をステープルまたはクリップ付与端部エフェクターに伝達することによって圧縮する。
【0003】
上記に記載の外科用器具との特定の外科用手順の実行の間に、上記ハンドルアセンブリから上記端部エフェクターへの力の付与および伝達は、最終的に、手術されている組織への過剰の損傷を生じ得る。例えば、把持器具が組織を操作するために利用されるとき、組織に付与された過剰の力は、不注意に組織への損傷を引き起こし得る。
【発明の概要】
【発明が解決しようとする課題】
【0004】
外科用器具のハンドルアセンブリから端部エフェクターに伝達される過剰の力に起因する損傷の可能性に加えて、損傷はまた、この器具自体に起因して生じ得る。これは、手術される組織が、それが外科用器具によって圧縮または切断されることができないように十分剛直または硬い場合に生じ得る。さらに、特定の硬い組織は、組織のステープル留めが所望される状況でファスナーに付与される力の量によっては貫通できないかもしれない。同様に、器具は、組織の圧縮が外科用クリップの付与の間に要求される場合、これら組織を完全に圧縮できないかも知れない。さらに、多くの外科用器具は、組織に複数のクリップまたはステープルを付与するために置換可能または使い捨て可能なカートリッジアセンブリを利用する。外科用器具に対するこのカートリッジアセンブリの不適切な位置決め、またはこれらカートリッジアセンブリ自体の誤作動は、ハンドルアセンブリのトリガーに対する圧力の付与に対する外科用器具の抵抗を生じ得、それによって、外科用器具自体への損傷を引き起こす。これはまた、カートリッジアセンブリにファスナーがなく、そして外科医がこの外科用器具を継続するか、または再使用することを試みる場合に生じ得る。
【0005】
それ故、組織への損傷を防ぐために、ハンドルアセンブリから端部エフェクターに伝達される力の量を制限する機構を組み込む外科用器具との使用のためのハンドルアセンブリが有用であり得る。さらに、外科用器具自体への損傷を防ぐために端部エフェクターに伝達される力の量を制限し得る外科用器具との使用のためのハンドルアセンブリ自体もまた有用であり得る。
【課題を解決するための手段】
【0006】
(要旨)
作動する遠位端部分を有する外科用器具との使用のために調節可能な力制限機構を有するハンドルアセンブリが開示される。このハンドルアセンブリは、一般に、ハンドルハウジング、およびこのハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素を含む。駆動アセンブリは、このハンドルハウジング内に位置決めされ、そして上記駆動要素と係合可能であり、このハンドルハウジング内で上記駆動要素を移動する。アクチュエーターは、このハンドルハウジング上に移動可能に取り付けられる。
【0007】
力制限機構が、上記駆動アセンブリと上記アクチュエーターとの間に、このアクチュエーターを駆動アセンブリに離脱可能に連結する力制限機構を備えるように配置される。この力制限機構は、上記駆動アセンブリに取り付けられる第1の端部を有する連結ロッド、および上記アクチュエーター内に取り付けられる第2の端部を含む。この力制限機構は、上記アクチュエーター内に位置決めされ、そして上記連結ロッドの第2の端部に隣接するスプリングを含む。この力制限機構はまた、前記アクチュエーター内に位置決めされ、そして上記スプリングと係合可能であってこのスプリング内の力を変動する調節ねじを含む。
【0008】
上記連結ロッドは突出部を有し、そして上記駆動アセンブリは上記連結ロッド上の突出部と離脱可能に係合可能である切り抜き部分を有する。1つの実施形態では、この駆動アセンブリは、上部キャリアおよび下部キャリアを含む。この上部キャリアは、上記連結ロッドの第1の端部に連結される。上記下部キャリアは、上記駆動アセンブリの切り抜き部分を含み、そして上記連結ロッド上の突出部と係合可能である。1つの実施形態では、上記連結ロッドは、上記切り抜き部分が上記連結ロッド上の突出部から外れるとき、上記切り抜き部分を含む下部キャリアの一部分を支持するための傾斜部材を有する。
【0009】
上記下部キャリアは、上記ハンドルハウジング上に回転可能に取り付けられ、そして上記上部キャリア上の旋回点と第1の軸を規定する。上記連結ロッドは、上記上部キャリア上の連結点と第2の軸を規定する。上記第1の軸および第2の軸は、上記突出部が上記切り抜きと係合するとき実質的に平行である。上記第1の軸および第2の軸は、上記突出部が上記切り抜きと係合しないとき実質的に平行でない。1つの実施形態では、上記下部キャリアは、上記切り抜きを含む少なくとも1つの可撓性アームを有する。この可撓性アームは、上記突出部が上記切り抜きから外れるとき上記下部キャリアに対して外方に可撓性である。上記連結ロッドは、上記突出部が上記切り抜きから外れるとき上記可撓性アームを支持するための傾斜部材を含む。
【0010】
作動遠位端部分を有する外科用器具との使用のためのハンドルアセンブリがまた開示される。このハンドルアセンブリは、一般に、ハンドルハウジング、およびこのハンドルハウジング内に移動可能に取り付けられ、そして上記作動遠位端部分に連結されるラックを含む。駆動アセンブリは、上記ハンドルハウジング内に位置決めされ、そして上記ラックと係合可能であるつめを含む。トリガーが、上記ハンドルハウジング上に旋回可能に取り付けられる、そして調節可能な力制限機構が、上記駆動アセンブリの一部分に離脱可能に取り付けられる。この調節可能な力制限機構の一部分は、上記トリガー内の移動のために取り付けられる。この調節可能な力制限機構は、上記トリガーを上記駆動アセンブリに離脱可能に連結する。
【0011】
上記調節可能な力制限機構は、上記駆動アセンブリの一部分に連結された第1の端部および上記トリガー内に移動可能に取り付けられた第2の端部を有する連結ロッドを含む。上記調節可能な力制限機構はまた、上記トリガー内に、上記スプリングの第1の端部が上記連結ロッドの第2の端部と係合可能であるように取り付けられるように取り付けられるスプリングを含む。調節可能なねじが、上記トリガー内に、この調節可能なねじの回転が上記スプリング内の圧力を変えるように取り付けられる。1つの実施形態では、上記調節可能な力制限機構は、上記トリガー内に取り付けられ、そして上記スプリングと上記調節可能なねじとの間に位置決めされるブッシングを含む。
【0012】
1つの実施形態では、上記力制限機構は、上記アクチュエーターに取り付けられたキャリッジを含む。上記ハンドルアセンブリは、このキャリッジに旋回可能に連結されるつめを含むことが想定される。上記力制限機構は、上記アクチュエーターに滑動可能に連結されるプランジャーを含む。このプランジャーは、上記アクチュエーター内に少なくとも部分的に滑動可能に配置される。実施形態では、少なくとも1つのスプリングが、上記プランジャーと上記アクチュエーターとの間に配置される。上記キャリッジは、上記プランジャーを係合するための角度をなす表面を有することが想定される。上記プランジャーは、上記キャリッジの角度をなす表面を係合するための角度をなす面を含む。この角度をなす表面および角度をなす面は、上記キャリッジが上記ブランジャーを押し下げ得るように配列される。上記プランジャーは、所定の付勢力で上記キャリッジに向かって付勢される。
【0013】
ハンドルアセンブリによって端部エフェクターに付与される力の量を制御する方法がまた提供され、ハンドルハウジングおよびこのハンドルハウジング内に移動可能に取り付けられるラックを有するハンドルアセンブリを提供する工程を含む。駆動アセンブリが、このハンドルハウジング内に取り付けられ、そしてラックと係合可能である。トリガーが、このハンドルハウジング内に旋回可能に取り付けられ、そして力制限機構が、上記駆動アセンブリと上記トリガーとの間に、この力制限機構が上記トリガーを上記駆動アセンブリに離脱可能に連結するように配置される。この力制限機構の少なくとも一部分は、所定の力によって上記駆動アセンブリとの係合に押される。この力制限機構は、上記ラックに付与される所定量の力に応答して上記駆動アセンブリから離脱される。上記駆動アセンブリとの係合に押される力制限機構の一部分は、上記駆動アセンブリを係合するような形態であるスプリングで付勢されるプランジャーを含む。
【0014】
本発明により、さらに以下が提供される。
(項目1)作動する遠位端部分を有する外科用器具との使用のためのハンドルアセンブリであって:
ハンドルハウジング;
該ハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素;
該ハンドルハウジング内に位置決めされ、そして該駆動要素と係合可能であり、該ハンドルハウジング内で該駆動要素を移動させる駆動アセンブリ;
該ハンドルハウジング上に移動可能に取り付けられるアクチュエーター;および
該駆動アセンブリと該アクチュエーターとの間に配置される力制限機構であって、該アクチュエーターを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
(項目2)
前記力制限機構が連結ロッドを含み、該連結ロッドの第1の端部が前記駆動アセンブリに取り付けられ、そして該連結ロッドの第2の端部が前記アクチュエーター内に取り付けられる、項目1に記載のハンドルアセンブリ。
(項目3)
前記力制限機構が、前記アクチュエーター内に位置決めされ、そして前記連結ロッドの第2の端部に隣接するスプリングを含む、項目2に記載のハンドルアセンブリ。
(項目4)
前記力制限機構が、前記アクチュエーター内に位置決めされ、そして前記スプリングと係合可能であって該スプリング内の力を変動する、項目3に記載のハンドルアセンブリ。
(項目5)
前記連結ロッドが突出部を有し、そして前記駆動アセンブリが切り抜き部分を含み、該突出部が該切り抜き部分内に離脱可能に係合可能である、項目2に記載のハンドルアセンブリ。
(項目6)
前記駆動アセンブリが上部キャリアおよび下部キャリアを含み、該上部キャリアが前記連結ロッドの第1の端部に連結する、項目5に記載のハンドルアセンブリ。
(項目7)
前記駆動アセンブリの切り抜き部分が、前記連結ロッド上の突出部との離脱可能な係合のために前記下部キャリア中に含まれる、項目6に記載のハンドルアセンブリ。
(項目8)
前記連結ロッドが、前記駆動アセンブリが該連結ロッドから外れるとき前記下部キャリアの一部分を支持するための傾斜部材を有する、項目7に記載のハンドルアセンブリ。
(項目9)
前記下部キャリアが、前記ハンドルハウジング上に回転可能に取り付けられ、そして前記上部キャリア上の旋回点と第1の軸を規定する、項目8に記載のハンドルアセンブリ。
(項目10)
前記連結ロッドが、前記上部キャリア上の連結点と第2の軸を規定する、項目9に記載のハンドルアセンブリ。
(項目11)
前記第1の軸および第2の軸が、前記突出部が前記切り抜きと係合するとき実質的に平行である、項目10に記載のハンドルアセンブリ。
(項目12)
前記第1の軸および第2の軸が、前記突出部が前記切り抜きと係合しないとき実質的に平行でない、項目10に記載のハンドルアセンブリ。
(項目13)
前記下部キャリアが、前記切り抜きを含む少なくとも1つの可撓性アームを有する、項目12に記載のハンドルアセンブリ。
(項目14)
前記少なくとも1つの可撓性アームが、前記突出部が前記切り抜きから外れるとき前記下部キャリアに対して外方に可撓性である、項目13に記載のハンドルアセンブリ。
(項目15)
前記連結ロッドが傾斜部材を含み、そして該連結ロッド上の突出部が前記少なくとも1つの可撓性アーム上の切り抜きから外れるとき該少なくとも1つの可撓性アームが該傾斜部材上に静止する、項目14に記載のハンドルアセンブリ。
(項目16)
作動遠位端部分を有する外科用器具との使用のためのハンドルアセンブリであって:
ハンドルハウジング;
該ハンドルハウジング内に移動可能に取り付けられ、そして遠位端部分に連結されるラック;
該ハンドルハウジング内に位置決めされ、該ラックと係合可能であるつめを含む駆動アセンブリ;
該ハンドルハウジング上に旋回可能に取り付けられるトリガー;および
該駆動アセンブリの一部分に離脱可能に取り付けられ、そして該トリガー内の移動のために取り付けられた調節可能な力制限機構であって、該トリガーを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
(項目17)
前記調節可能な力制限機構が、前記駆動アセンブリの一部分に連結された第1の端部および前記トリガー内に移動可能に取り付けられた第2の端部を有する連結ロッドを含む、項目16に記載のハンドルアセンブリ。
(項目18)
前記調節可能な力制限機構が、前記トリガー内に、前記スプリングの第1の端部が前記連結ロッドの第2の端部と係合可能であるように取り付けられる、項目17に記載のハンドルアセンブリ。
(項目19)
前記調節可能な力制限機構が、前記トリガー内に、前記調節ねじの回転が該スプリング内の圧力を変えるように取り付けられる、項目18に記載のハンドルアセンブリ。
(項目20)
前記調節可能な力制限機構が、前記トリガー内に取り付けられたブッシングを含み、該ブッシングが前記スプリングと前記調節可能なねじとの間に位置決めされる、項目19に記載のハンドルアセンブリ。
(項目21)
作動遠位端部分を有する外科用器具との使用のためのハンドルアセンブリであって:
ハンドルハウジング;
該ハンドルハウジング内に移動可能に取り付けられ、そして手術を実施するために作動遠位部分に連結される駆動要素;
該ハンドルハウジング上に移動可能に取り付けられたアクチュエーター;および
該駆動要素と該アクチュエーターとの間に配置される力制限機構であって、離脱力を有する力制限機構;を備え、
該力制限機構が、該アクチュエーターに、該アクチュエーターに付与される力が該離脱力より小さいとき、該力制限機構が該アクチュエーターとともに移動するように、そして該アクチュエーターに付与される力が該離脱力と一致するとき、該力制限機構が該アクチュエーターに対して旋回するように、該アクチュエーターに付与される力が該離脱力より小さいとき、該力制限機構が該駆動要素に駆動力を付与する、ハンドルアセンブリ。
(項目22)
前記力制限機構が、下部キャリアを含む、項目21に記載のハンドルアセンブリ。
(項目23)
前記力制限機構が、前記アクチュエーターに連結され、そして前記下部キャリアに離脱可能に連結される、連結ロッドを含む、項目22に記載のハンドルアセンブリ。
(項目24)
前記連結ロッドが前記アクチュエーター中に滑動可能に配置され、そしてスプリングが該アクチュエーターと該連結ロッドとの間に位置決めされる、項目23に記載のハンドルアセンブリ。
(項目25)
前記下部キャリアが、前記アクチュエーターに旋回可能に連結される、項目24に記載のハンドルアセンブリ。
(項目26)
前記下部キャリアが上部キャリアに旋回可能に連結され、該上部キャリアが前記連結ロッドに旋回可能に連結される、項目25に記載のハンドルアセンブリ。
(項目27)
前記駆動要素が少なくとも1つの歯を有するラックを備え、そして該ラックとの係合のために前記力制限機構に旋回可能に連結されるつめをさらに備える、項目22に記載のハンドルアセンブリ。
(項目28)
前記力制限機構が、前記アクチュエーターと機械的に協動するキャリッジを含む、項目21に記載のハンドルアセンブリ。
(項目29)
前記キャリッジに旋回可能に連結されるつめをさらに備える、項目28に記載のハンドルアセンブリ。
(項目30)
前記力制限機構が、前記アクチュエーターに滑動可能に連結されるプランジャーを含む、項目29に記載のハンドルアセンブリ。
(項目31)
前記プランジャーが、前記アクチュエーター内に少なくとも部分的に滑動可能に配置される、項目30に記載のハンドルアセンブリ。
(項目32)
少なくとも1つのスプリングが、前記プランジャーと前記アクチュエーターとの間に配置される、項目31に記載のハンドルアセンブリ。
(項目33)
前記キャリッジが、前記プランジャーの少なくとも一部分を係合するための角度をなす表面を含む、項目30に記載のハンドルアセンブリ。
(項目34)
前記プランジャーが前記角度をなす表面を係合するための角度をなす面を含み、該角度をなす表面および角度をなす面が、前記キャリッジが該ブランジャーを押し下げ得るように配列される、項目33に記載のハンドルアセンブリ。
(項目35)
前記プランジャーが、所定量の力で前記キャリッジに向かって付勢される、項目34に記載のハンドルアセンブリ。
(項目36)
ハンドルアセンブリによって端部エフェクターに付与される力の最大量を制御する方法であって:
ハンドルハウジングを有するハンドルアセンブリ、該ハンドルハウジング内に移動可能に取り付けられたラック、該ハンドルハウジング内に取り付けられ、そして該ラックと係合可能である駆動アセンブリ、該ハンドルハウジング内に旋回可能に取り付けられたトリガー、および該駆動アセンブリと該トリガーとの間に置かれ、該トリガーを該駆動アセンブリに離脱可能に連結するクラッチ機構を提供する工程;
該クラッチ機構の少なくとも一部分を所定の力によって該駆動アセンブリとの係合に押す工程;および
該ラックに付与される所定量の力に応答して、該クラッチ機構を該駆動アセンブリから離脱する工程、を包含する、方法。
(項目37)
前記クラッチ機構の少なくとも一部分を押す工程が、該クラッチ機構と連結されるスプリングで付勢されるプランジャーを前記駆動アセンブリとの係合に押すことを含む、項目36に記載の方法。
【図面の簡単な説明】
【0015】
調節可能な力制限機構を組み込む本明細書に開示されるハンドルアセンブリの実施形態は、図面を参照して本明細書中に開示される。
【図1】図1は、ハンドルハウジングの半分が除かれたハンドルアセンブリの斜視図である。
【図2】図2は、パーツが分離されたハンドルアセンブリの斜視図である。
【図3】図3は、ハンドルハウジングの半分が除かれ、そして初期位置にあるハンドルアセンブリの側面図である。
【図4】図4は、ハンドルアセンブリに関連する力制限機構の初期の不起動化の間のハンドルアセンブリの斜視図である。
【図5】図5は、力制限機構が関連する駆動アセンブリから外れる間のハンドルアセンブリの力制限機構の端面図である。
【図6】図6は、力制限機構構成要素が駆動アセンブリから外れたハンドルアセンブリの斜視図である。
【図7】図7は、ハンドルハウジングの半分を除いた、力制限トリガースイッチを組み込むハンドルアセンブリの斜視図である。
【図8】図8は、パーツを分離した、図7のハンドルアセンブリの斜視図である。
【図9】図9は、ハンドルハウジングの半分を除いた、初期の発射前状態にあるハンドルアセンブリの側面図である。
【図10】図10は、初期の起動された状態にある、ハンドルアセンブリの拡大側面図である。
【図11】図11は、初期起動の間の、そして過負荷状態に遭遇するハンドルアセンブリの拡大側面図である。
【図12】図12は、トリガーがハンドルアセンブリの駆動構成要素から外れた過負荷状態の間のハンドルアセンブリの拡大側面図である。
【発明を実施するための形態】
【0016】
(詳細な説明)
力制限ハンドル機構を組み込む本明細書に開示されるハンドルアセンブリの実施形態は、ここで、図面を参照して詳細に説明され、図面では、同様の番号は、いくつかの図面の各々で同一または対応する要素を指定する。当該技術分野で一般的であるように、用語「近位」は、使用者または操作者、例えば、外科医または医師により近いパーツまたは構成要素をいい、その一方、用語「遠位」は、使用者からより遠く離れたパーツまたは構成要素をいう。
【0017】
最初に図1を参照して、外科用器具との使用のためのハンドルアセンブリ10が開示される。ハンドルアセンブリ10は、調節可能な力制限機構(例えば、クラッチ)を組み込み、組織に付与される過剰の力を防ぎ、そして関連する端部エフェクターに存在する過負荷状態の事象においてハンドルアセンブリ10自体への損傷を防ぐ。ハンドルアセンブリ10は、外科用器具であって、その遠位端部分に、クリップまたはステープル付与装置のような端部エフェクターを組み込む外科用器具における使用に特に適切である。ハンドルアセンブリ10は、一般に、ハンドルハウジング12内の長軸方向軸移動のために取り付けられた細長い駆動ラック14を揺するハンドルハウジング12を含む。ハンドルアセンブリ10は、ハンドルハウジング12の半分のみとともに示されているが、完全および十分に機能的なハンドルアセンブリ10は、ハンドルハウジング12の2つの半分体を含む。ハンドルアンセブリ10はさらに、ハンドルハウジング12上に移動可能に取り付けられたアクチュエーターまたはトリガー16を含む。トリガー16の起動は、駆動ラック14をハンドルハウジング12内で長軸方向に移動させる。
【0018】
ハンドルハウジング12にはさらに、外科用器具の遠位端部分の回転可能な支持のためのジャーナル(軸受)鼻部分18が提供される。これは、外科用器具の遠位端部分と関連する端部エフェクターがハンドルアセンブリ10に対して回転されることを可能にする。
【0019】
駆動ラック14を移動させるために、ハンドルアセンブリ10は、駆動ラック14とトリガー16との間に位置決めされた駆動アセンブリ20を含む。駆動アセンブリ20は、操作者の手の一部分によるトリガー16によって付与された動きを、駆動ラック14に移し、駆動ラック14をハンドルハウジング12内で長軸方向に並進させ、そしてそれ故、関連する端部エフェクターを起動する。駆動アセンブリ20は、本明細書で以下により詳細に記載される様式で、トリガー16の起動に応答してハンドルハウジング12内でラック14を移動するための上部キャリア22およびつめ24を含む。詳細には、つめ24が、ラック14中に形成される歯28を係合するような形態である遠位リップ26とともに提供される。歯28は、遠位リップ26が歯28を係合し得、そしてつめ24が遠位方向に移動され、そしてつめ24が駆動ラック14に対して近位方向に引かれるにつれて駆動ラック14から外れるとき、駆動ラック14をハンドルハウジング12内で遠位方向に移動し得るように配向される。
【0020】
本明細書で上記で注記されたように、ハンドルアセンブリ10は、力制限機構30が、駆動アセンブリ20とトリガー16との間に存在する所定量の力に遭遇するとき、駆動アセンブリ20、そしてそれ故駆動ラック14からトリガー16を外すために提供される調節可能な力制限機構を含む。これは、端部エフェクターが、外科用器具の継続する作動がこの外科用器具または組織への損傷を生じるような十分に剛直性または頑健な材料に遭遇する状況で生じ得る。さらに、過剰の力の状態が関連する端部エフェクターへの損傷の事象で生じ得、それによって、駆動ラック14がハンドルハウジング12内で長軸方向に並進することを防ぐ。
【0021】
特定の実施形態では、上記過剰の力の状態の限界は、ハンドルアセンブリ10の形態化の間に、ハンドルアセンブリ10と関連する端部エフェクターが操作される組織に対する所定の力まで力が付与されるのみであるように予備設定され得る。これは、この関連する端部エフェクターが、組織に外科用クリップまたはステープルを付与するような形態であるときに所望され得る。一旦、この所定または予備設定された力に到達すると、力制限機構30は、トリガー16が駆動アセンブリ20から外れることを可能にし、それによって、組織に付与される力の過剰の量を防ぐ。
【0022】
力制限機構30は、一般に、これもまた駆動アセンブリ20のパーツを形成する下部キャリア32、および下部キャリア32および上部キャリア22と係合可能な連結ロッド34を含む。調節可能な力制限機構30は、さらに、トリガー16中のポケット38内に位置決めされる圧力スプリング36を含む。実施形態では、圧力スプリング36は、力制限機構30がその使用者にトリガー16の大きな力の不釣り合いおよび/または加速を制限または防ぐように係合されるとき、トリガー16に前進力付勢を供給する。圧力スプリング36はまた、連結ロッド34に圧力を付与し、そしてトリガー16内に位置する調節ねじ40により調節可能である。ブッシング42はまた、トリガー16内に位置決めされ、トリガーポケット38内で圧力スプリング36を支持する。ブッシング42は、調節ねじ40の受容のためにねじのある内面を、調節ねじ40の回転がブッシング42を移動し、圧力スプリング36中の圧力を増加または減少するように有する。トリガー16は、調節ねじ40への遠隔アクセスのための窓44を含み得、連結ロッド34に対して圧力スプリング36によって付与される圧力を調節する。
【0023】
上記で注記したように、下部キャリア32は、駆動アセンブリ20および調節可能な力制限機構30の両方の一部分を形成する。下部キャリア32は、駆動アセンブリ20が連結ロッド34、そしてそれ故トリガー16から外れることを可能にする。下部キャリア32は、連結ロッド34上に形成される1つ以上の突出部48と協動する1つ以上の切り抜きを含む。過剰圧力状態の間に、切り抜き46は、下部キャリア32が連結ロッド34から、本明細書で以下により詳細に記載される様式で突出部48から外方に張り出すことによって外れることを可能にする。傾斜部材(ランプ)が連結ロッド34上に提供され、下部キャリア32を、キャリア32が連結ロッド34から解放された後、外方に張り出すか、または傾斜する状態で維持する。下部キャリア32を、外方に張り出す状態で維持することにより、キャリア32は、連結ロッド34を再係合し得る。さらに傾斜部材50は、トリガー16が少なくとも部分的に解放されるとき、キャリア32への突出部48の再係合を容易にする。
【0024】
論議されるように、ラック14は、ハンドルハウジング12内の長軸方向移動のために取り付けられる。ラック14は、ハンドルハウジング12中に形成されたハウジングレール54に沿って載るラックリップ52を含む。
【0025】
ここで図2を参照して、ハンドルアセンブリ10は、外科用器具、特に、移動する端部エフェクターを組み込む細長い遠位端を有するタイプの器具との使用のための形態である。例えば、ハンドルアセンブリ10は、クリップまたはステープル付与外科用器具との使用のために特に適切である。ハンドルアセンブリ10中に調節可能な力制限機構30を含めることは、操作者が、外科用クリップもしくはステープルおよび/または圧縮される組織に端部エフェクターによって付与され得る力の最大量を予備設定することを可能にする。代表的なクリップ付与装置は、ハンドルアセンブリ10からの動きをクリップ付与外科用器具の端部エフェクターまたは顎に移す駆動ロッドを含む。この駆動ロッドを収容するために、ハンドルアセンブリ10のラック14は、ラック14の遠位端58中に形成されるソケット56を含む。ソケット56は、ラック14が駆動ロッドに、ラック14が駆動ロッドを外科用器具の関連する遠位端部分内で長軸方向に移動し得るように連結されることを可能にする。ソケット56はまた、外科用器具の遠位端部分がハンドルアセンブリ10に対して回転されるとき、駆動ロッドがソケット56内で回転することを可能にする。
【0026】
トリガー16をハンドルアセンブリ12に取り付けるために、ハンドルアセンブリ12には、取り付けポスト60が提供される。トリガー16は、本体部分62、および本体部分62から垂れ下がるフィンガーグリップ部分64を含む。本体部分62は、取り付けポスト60上に適合する旋回穴66を含み、そしてトリガー16がハンドルハウジング12に対して旋回することを可能にする。ねじれスプリング68が提供され、トリガー16をハンドルハウジング12に対して開放位置に付勢する。ねじれスプリング68は、中央部分70、第1のアーム72および第2のアーム74を含む。中央部分70は、トリガー16の本体部分62内、そして取り付けポスト60上に適合する。ねじれスプリング68の第1のアーム72は、ハンドルハウジング12上に形成されたハウジング壁76と係合し、その一方、第2のアーム74は、本体部分62の内面78と係合する。
【0027】
本明細書中で上記に注記したように、駆動アセンブリ20は、一般に、上部キャリア22、つめ24および下部キャリア32を含む。上部キャリア22は、下部キャリア32の一部分の受容のための一対の溝またはスロット80を含む。ピン穴80が、ピン84の受容のために上部キャリア22中に提供され、上部キャリア22を、つめ24に連結し、そして上部キャリア22を下部キャリア32に固定する。つめ24は、ピン84の受容のために一対の旋回穴86を含み、つめ24を上部キャリア22に旋回可能に連結する。つめ24を上方にラック14との係合に付勢するため、駆動アセンブリ20は、ねじれスプリング88わ含む。ねじれスプリング88は、中央部分90、第1のアーム92および第2のアーム94を含む。中央部分90は、旋回穴86間に適合し、そしてピン84上に取り付ける。第1のアーム92は、つめ24の内側面(図示せず)と係合し、その一方、第2のアーム94は、上部キャリア22の内面(図示せず)と係合する。
【0028】
下部キャリア32は、ほぼU形状の部材として形成され、そして上部キャリア22中のスロット80内に適合する一対の上部アーム96を含む。上部アーム96は、ピン84の受容のために上部キャリア22中のピン穴82と整列する取り付け穴98を含み、下部キャリア32を上部キャリア22に固定する。下部キャリア32は、取り付けポスト60上に下部キャリア32を回転可能に取り付けるために提供される旋回穴102を有する中央部分100をさらに含む。組み立てられるとき、下部キャリア32は、トリガー16の本体部分62内に、ねじれスプリング68が下部キャリア32中の取り付け穴102間に位置決めされるように適合する。下部キャリア32は、連結ロッド34上の突出部48上に適合するような形態である一対の切り抜き46を取り込む。切り抜き46は、下部キャリア32中の下部アーム104中に形成される。下部アーム104は、中央部分100および連結ロッド34に対して、下部アーム104が連結ロッド34中の突出部48上で切り抜き46を通過するように屈曲または外方に傾斜し得るように十分に可撓性であり得る。この様にして、ハンドルアセンブリ10が上記で注記された過剰の力状態に遭遇するとき、下部アーム104は連結ロッド34から外される。
【0029】
ハンドルアセンブリ10は、過剰の力状態の存在の間に、駆動アセンブリ20からトリガー16を外し得る力制限機構30を含む。力制限機構30は、操作者が、トリガー16が駆動アセンブリ20から外されることを引き起こす正確な量の力「離脱力」を予備設定し得るように調節可能である。調節可能な力制限機構30は、一般に、連結ロッド34、スプリング36、ならびに、ブッシング42および調節ねじ40を含む。連結ロッド34は、ピン110の受容のための旋回穴108を有する上部アーム106を含む。ピン110は、連結ロッド34の上部アーム106を上部キャリア22に連結する。詳細には、上部キャリア22は、ピン110の受容のための一対の取り付け穴112を含み、上部キャリア22を連結ロッド34と旋回して連結する。
【0030】
連結ロッド34は、その上に少なくとも1つの突出部48が位置される中央部分114、および本明細書中以下でより詳細に記載される様式で下部キャリア32に連結ロッド34を連結および脱連結し得る少なくとも1つの傾斜部材50を含む。連結ロッド34は、ボール端部118で終結する下部アーム116をさらに含む。下部アーム116の一部分およびボール端部118は、トリガー16中に形成されたポケット38中に、連結ロッド34がポケット38内の移動が拘束されるように延びる。ボール端部118は、スプリング36の第1の端部120に対し、スプリング36が連結ロッド34に上方圧力を提供するように静止するような形態である。スプリング36の第2の端部122は、ブッシング42および調節ねじ40を受容するような形態である。調節ねじ40の回転は、ブッシング42がスプリング36内の圧縮を増加または減少させる。
【0031】
ここで、図3〜6を参照し、そしてはじめに図3について、調節可能な力制限機構30を組み込むハンドルアセンブリ10の作動が説明される。上記で注記したように、ハンドルアセンブリ10は、種々の外科用器具における使用のための形態である。力制限機構30の調節可能な性質に起因して、ハンドルアセンブリ10は、クリップ付与機構、ステープル付与機構、顎移動機構などに付与される力を制限するためのクリップまたはステープル付与外科用器具における使用のために特に適している。初期位置では、トリガー16は、ハンドルアセンブリ12に対し、ねじれスプリング68によって開放位置に付勢される。つめ24は壁76を打ち、その結果、つめ24はラック14から外れる。クリップまたはステープル付与部分の遠位端にアセンブルされるとき、クリップまたはステープル付与遠位端の発射ロッド126は、ハンドルアセンブリ10に取り付けられる。詳細には、発射ロッド126の近位端124は、ラック14上のソケット56内に取り付けられ得る。発射ロッド126の遠位端128は、外科用器具のクリップ付与遠位端部分と関連するクリップまたはステープル付与および供給機構まで延びる。
【0032】
示されるように、初期位置では、軸A−Aは、取り付けポスト60と、上部キャリア22を下部キャリア32に連結するピン84を通って規定される。第2の軸B−Bは、連結ロッド34、および連結ロッド34を上部キャリア22に連結するピン110をほぼ通って規定される。連結ロッド34は、ピン110の周りで上部キャリア22に対して旋回し得ることが注目されるべきである。スプリング36は、連結ロッド34のボール端部118に対して圧力を奏する。上記で注記されるように、使用の前に、外科医または製造業者は、調節ねじ40の使用により、「離脱力」を予備設定し得る。作動状態では、連結ロッド34の少なくとも1つの突出部48は、下部キャリア32の下部アーム104中のスロット46内に堅く着座される。代表的な作動では、ハンドル16のハンドルアセンブリ12に対する移動は、下部キャリア32、連結ロッド34および上部キャリア22を、単一の連結されたユニットとして取り付けポスト60の周りで旋回させる。取り付けポスト60の周りの上部キャリア22の旋回は、つめ24を壁76から離して動かし、その結果、つめ24は、ラック14からの係合に旋回する。つめ24は、ハンドル16によって遠位方向に駆動され、ラック14をハンドルアセンブリ12内で遠位方向に進行し、それによって、発射ロッド126を移動して外科用器具の遠位端部分と関連する1つ以上の機能を起動する。
【0033】
ここで図4を参照して、ハンドルアセンブリ10は、トリガー16が矢印Aの方向に旋回された初期起動状態で示される。ラック14がハンドルハウジング12内で遠位方向にもはや並進できないような外科用器具の遠位端部分における状況が生じるとき、つめ24は、遠位移動が妨げられ、それによって、上部キャリア22および下部キャリア32が、取り付けポスト60に対して旋回することを防ぐ。代替例では、ハンドルで付与された力が所定の閾値に到達したときに状況が生じる。
【0034】
ここで図4および5を参照して、矢印Aの方向にトリガー16に対して継続される力が奏されるとき、連結ロッド34は、下部キャリア32に対して取り付けポスト60の周りで旋回を継続するように試みる。連結ロッド34はピン110で上部キャリア22に対して旋回が固定されているので、連結ロッド34は、スプリング36の力に対して矢印Bの方向に下方に駆動される。図3に示される軸A−AおよびB−Bは、互いに対して回転し始める。連結ロッド34のキャリア32に対する下方への移動は、下部アーム104を押して、スロット46が連結ロッド34中の突出部48から離れて持ち上がるように曲げるか、または傾斜する。スロット46が突出部48から外れ、この連結ロッド34は、下部キャリア32に対して旋回し得る。突出部48が下部アーム104中のスロット46から完全に離れるようになるとき、連結ロッド34は、下部キャリア32から外れる。トリガー16は、図6に最も良く示されるように、完全に閉じられた位置まで旋回し続け得る。
【0035】
図6に示されるように、下部アーム104は、連結ロッド34上の傾斜部材50の存在によって連結ロッド34に対して外方に曲がった状態に維持される。一旦、力制限機構32によって遭遇される力が「離脱力」から減少すると、トリガー16は、ねじれスプリング68および/またはスプリング36の付勢に起因して開放位置まで戻り得る。トリガー16がこの開放位置に戻ると、傾斜部材50によって外方に曲がった状態に維持されている下部アーム104は、連結ロッド34上で、スロット46が連結ロッド34上の突出部48を再係合するようにリセットするようにされる。この移動は、ハンドルアセンブリ10を、図3に示されるような初期作動位置に戻す。
【0036】
それ故、調節可能力制限機構30を組み込むハンドルアセンブリ10は、外科用器具の遠位端部分を起動するために安全に用いられ得、その一方、この器具の遠位端が組織/または器具パーツに対して過剰の力(すなわち、「離脱力」)を超えることを防ぎ、そしてそれによって、組織およびこの器具自体に対する損傷を防ぐ。
【0037】
ここで図7〜12を参照して、外科用器具との使用のためのハンドルアセンブリ210が開示される。ハンドルアセンブリ210は、力制限機構230を組み込み、組織に付与される過剰の力を防ぎ、そして関連する端部エフェクターに存在する過負荷状態の事象におけるハンドルアセンブリ210への損傷を防ぐ。ハンドルアセンブリ210は、一般に、ハンドルハウジング212内の長軸方向移動のために取り付けられた細長い駆動ラック214を囲むハンドルハウジング212を含む。ハンドルアセンブリ210は、ハンドルハウジング212の半分のみが見えるように示されているが、当業者は、完全または十分に機能的なハンドルアセンブリ210は、ハンドルハウジング212の両方の半分体を含むことを認識する。ハンドルアセンブリ210は、ハンドルハウジング212上に移動可能に取り付けられたトリガー216をさらに含む。トリガー216の起動は、駆動ラック214を、ハンドルハウジング212内で長軸方向に移動させる。
【0038】
ハンドルハウジング212には、外科用器具の遠位端部分の回転可能な支持のためのジャーナル鼻部分218がさらに提供される。これは、この外科用器具の遠位端部分と関連する端部エフェクターが、ハンドルアセンブリ210に対して回転されることを可能にする。
【0039】
駆動ラック214を移動するために、ハンドルアセンブリ210は、駆動ラック214とトリガー216との間に位置決めされる駆動アセンブリ220を含む。駆動アセンブリ220は、操作者の手によってトリガー216に付与される動きを駆動ラック214に移し、駆動ラック214をハンドルハウジング212内で長軸方向に並進し、そしてそれ故、関連する端部エフェクターを起動する。駆動アセンブリ220は、トリガー216との移動のために取り付けられるキャリッジ222を含む。つめ224は、キャリッジ222に旋回して連結され、そして駆動ラック214がハンドルハウジング212内で移動するように係合するために提供される。詳細には、つめ224には、駆動ラック214上に提供される歯228を係合するような形態である遠位リップ226が提供される。つめ224は、スプリングで付勢されて駆動ラック214との係合に付勢される。本明細書で以下に注記されるように、歯228は、遠位リップ226が歯228を係合し得、そしてつめ224が遠位方向に移動され、そしてつめ224が駆動ラック214に対して近位方向に引かれるとき駆動ラック214から外れるとき、駆動ラック214をハンドルハウジング212内で遠位方向に移動するように配向される。
【0040】
本明細書で上記に注記されるように、ハンドルアセンブリ210は、力制限機構230が、駆動アセンブリ220とトリガー216との間に存在する所定量の力に遭遇するとき、駆動アセンブリ220、そしてそれ故駆動ラック214からトリガー216を外すために提供される力制限機構230を含む。これは、端部エフェクターが、外科用器具の継続する作動がこの外科用器具または組織への損傷を生じるような十分に剛直性または頑健な材料に遭遇する状況で生じ得る。さらに、過剰の力の状態が関連する端部エフェクターへの損傷の事象で生じ得、それによって、駆動ラック214がハンドルハウジング212内で長軸方向に並進することを防ぐ。
【0041】
特定の実施形態では、上記過剰の力の状態は、ハンドルアセンブリ210の形態化の間に、ハンドルアセンブリ210と関連する端部エフェクターが操作される組織に対する所定の力まで力が付与されるのみであるように予備設定され得る。一旦、この所定の力に到達すると、力制限機構230は、トリガー216が駆動アセンブリ120から外れることを可能にし、それによって、組織に付与される力の過剰の量を防ぐ。
【0042】
力制限機構230は、トリガー216上に移動可能に取り付けられるプランジャー232を含む。プランジャー232は、キャリッジ222を係合し、そしてトリガー216の運動をキャリッジ222、そしてそれ故つめ224に移すような形態であり、ハンドルハウジング212内でラック214を並進する。力制限機構230は、キャリッジ222とプランジャー232との間に存在する所定の力に応答してキャリッジ222からプランジャー232を外すことにより、キャリッジ222からトリガー216を外すように作動する。
【0043】
上記で注記したように、ラック214は、ハンドルハウジング212内の長軸方向移動のために取り付けられる。ラック214は、ハンドルハウジング212上に提供される長軸方向のハウジングレール236に沿って載るラックリップ234を含む。ラック214は、ハウジングレール236に沿って移動するとして開示されているけれども、ハンドルハウジング212内の長軸方向移動のための支持ラック214のその他の手段が、それに代わって提供され得、例えば、溝、トラック、またはハンドルハウジング212内の移動のためにラック214を長軸方向に支持するその他の方法などである。
【0044】
図8を参照して、ハンドルアセンブリ210の構成要素が詳細に説明される。上記で注記したように、ハンドルアセンブリ210は、移動可能な端部エフェクターを組み込む種々の外科用器具の遠位端セクションとの使用のための形態である。ハンドルアセンブリ210のラック214には、ラック214の遠位端240上に形成されたソケット238が提供される。ソケット238は、外科用器具の遠位端構成要素と関連する駆動または運動ロッドを受容するような形態であり得る。ラック214は、ソケット238を有するとして示されているけれども、ラック214を外科用器具の遠位端の移動可能な構成要素に連結するその他の手段もまた、本明細書中で企図される。
【0045】
トリガー216がハンドルハウジング212に対して移動するようにするため、ハンドルハウジング212には、本明細書中で以下により詳細に説明される様式でトリガー216およびキャリッジ222の両方のための旋回点として供される取り付けポスト242が提供される。トリガー216には、本体部分244、および本体部分244から垂れ下がる開放フィンガー部分246が提供される。本体部分244は、ハンドルハウジング212上の取り付けポスト242上に適合する旋回穴248を含む。ねじれスプリング250が、ハンドルハウジング212とトリガー216との間に提供され、トリガー216を最遠位または開放位置に付勢する。ねじれスプリング250は、中央部分252、第1のアーム254および第2のアーム256を含む。ねじれスプリング250は、トリガー216の本体部分244中に形成された中央スロットまたは腔258内に適合する。中央部分252は取り付けポスト242上に適合し、そして第1のアーム254は、ハンドルハウジング212に形成されたハウジング壁260に対して静止する。ねじれスプリング250の第2のアーム256は、本体部分244上に形成された近位タブ262と係合し、トリガー216を開放位置に付勢する。
【0046】
トリガー216の本体部分244は、キャリッジ222との係合のための前方タブ264をさらに含み、キャリッジ222をラック214に対して近位方向に移動する。本体部分244は、プランジャー232の受容のためのプランジャーポケット266をさらに含み、本明細書中で以下により詳細に説明される様式で、プランジャー232がキャリッジ222との係合に出入りすることを可能にする。
【0047】
図8を参照して、キャリッジ222は、一般に、取り付け穴270を有する下部部分268を含む。下部部分268は、トリガー216中に形成された腔258内に、取り付け穴270が取り付けポスト242上に適合するように適合する。それ故、キャリッジ222は、トリガー216の本体部分244と共通の軸の周りに旋回する。キャリッジ222は、一対の取り付け穴274を有する部分的に切片にされたか、または分割上部部分272をさらに含む。旋回ピン276は、取り付け穴274を通って提供され、つめ224をキャリッジ222に取り付ける。これは、つめ224がキャリッジ222の移動によって長軸方向に駆動されることを可能にし、そしてつめ224がキャリッジ222に対して旋回することを可能にする。
【0048】
キャリッジ222は、力制限機構230がトリガー216をキャリッジ222から外すとき、トリガー216がキャリッジ222に対して旋回し得るように、アンダーカットまたは弧状面278をさらに含む。キャリッジ222には、力制限機構230のプランジャー232上の対応する面を離脱可能に係合するような形態である角度をなす面280が提供される。トリガー216には、トリガー216がキャリッジ222とは独立に旋回し得るように対応する弧状面282が提供される。キャリッジ222の上部部分272は、トリガー216の解放に応答してキャリッジ222を時計方向に回転するようにスロット258の前方エッジ259によって係合される先導エッジ284を含み、そしてそれ故、つめ224をハンドルハウジング212内で近位方向に引く。
【0049】
つめ224は、ほぼU形状または一対の取り付け穴286を有するサドル部材として形成される。つめ224は、取り付け穴286を通るピン276の挿入によってキャリッジ222に旋回して連結される。駆動アセンブリ220は、つめ224をラック214との係合に付勢するためにねじれスプリング288をさらに含む。詳細には、ねじれスプリング288は、中央部分290せ、第1のアーム292および第2のアーム294を含む。中央部分290は、ピン276の上に適合し、そしてそれによって支持される、そして第1のアーム292は、キャリッジ222上に形成された面296に対して静止する。第2のアーム294は、つめ224の下側つめ面298と係合し、つめ224をラック214との係合に上方に付勢する。
【0050】
本明細書で上記に注記したように、ハンドルアセンブリ210は、ラック214の移動する能力がないことを含む因子に起因して駆動アセンブリ220が移動することを妨げられるとき、トリガー216が駆動アセンブリ220から外されることを可能にする力制限機構230を組み込む。力制限機構230は、一般に、プランジャー232、およびプランジャーポケット266内で、かつプランジャー232の下に位置される一対のスプリング306を含み、プランジャー232をキャリッジ222との係合に上方に付勢する。
【0051】
図10を参照して、プランジャー232は、キャリッジ222上の角度をなす面280を係合するような形態である角度のある表面300を含む。角度をなす表面300の角度をなす面280との係合は、トリガー216が起動されるとき、トリガー216がキャリッジ222に連結され、そしてキャリッジ222を旋回することを可能にする。示されるように、プランジャー232は、キャリッジ222の弧状面278に対して静止し、そしてプランジャー232がプランジャーポケット266およびトリガー216から跳ねることを防ぐ比較的平坦な面302をさらに含む。1つの実施形態では、プランジャー232には、スプリング306の一部分を受容するためにプランジャーポケット304が形成される(図8)。
【0052】
プランジャー232がキャリッジ222から外れるようにプランジャー232によって遭遇される力の量は、少なくとも2つの異なる様式で予備設定され得る。第1には、角度をなす面280および角度をなす表面300は、それらの間で所定の摩擦係数を規定するように形成され得る。これは、一部、角度をなす表面300が角度をなす面280に対して滑るために必要な力の量を決定し、そしてプランジャー232がプランジャーポケット266内で下方に押され、そしてキャリッジ222から外れることを可能にする。第2に、スプリング306の力は、プランジャーポケット266内でプランジャー232を下方に押すために必要な力を決定するように選択され得、そしてそれによって、プランジャー232をキャリッジ222から外す。角度をなす表面300と角度をなす面280との角度は、所定量の力に影響するように選択され得る。力制限機構230は2つのスプリング306を利用するとして示されているけれども、任意の数のスプリング、およびその他の形態のスプリングが、プランジャー232をキャリッジ222との係合に押すために利用され得ることが注目されるべきである。第3に、調節スプリング235(図10)が、スプリング力の調節を容易にするために含められ得る。
【0053】
ここで図9〜12を参照し、そして最初に図9に関して、ハンドルハウジング212でラック214を進行するためのハンドルアセンブリ10の作動が説明される。示されるように、初期位置では、ラック214は、ハンドルハウジング212内で最近位位置にある、そしてトリガー216は、ねじれスプリング250によって開放または最遠位位置まで付勢される。力制限機構230のプランジャー232は、キャリッジ222と係合され、キャリッジ222がトリガー216との取り付けポスト242上で共通軸の周りで旋回することを可能にする。つめ224は、ねじれスプリング288(図8)の付勢に起因して上方に押され、つめ224の遠位リップ226をラック214の歯228との係合に押す。
【0054】
ここで図10を参照して、トリガー216が握り締められるか、またはハンドルハウジング212に対して近位方向に移動されるとき、トリガー216の本体部分244は、取り付けポスト242の周りで半時計様式で回転する。キャリッジ222は、本体部分244と共通して取り付けポスト242の周りで旋回する。本明細書中で上記に注記したように、キャリッジ222の角度をなす面280は、プランジャー232の角度をなす表面300と係合しており、キャリッジ222とトリガー216との間の連結を維持する。キャリッジ222が取り付けポスト242の周りで旋回するとき、それは、つめ224を遠位方向に駆動し、それによって歯228との遠位リップ226の係合に応答してラック214を遠位方向に駆動する。
【0055】
ラックおよびつめ係合システムと共通しているように、ラック歯228は、歯224の遠位リップ226と係合されるような形態である比較的平坦な駆動面308を、つめ224がラック214を長軸方向に駆動し得るように含む。ラック歯228は、角度をなすか、または傾斜した表面310をさらに含む。傾斜した表面310は、つめ224がラック214に対して近位方向に、遠位リップ226が角度をなす表面310の上に載り、そしてねじれスプリング288の付勢に対して下方に移動するように移動することを可能にする。これは、トリガー216が駆動ラック214をより遠くの量で遠位方向に再び起動され得るように、つめ224が新たな位置に近位方向に戻って引かれることを可能にする。
【0056】
ここで図11を参照して、本明細書で上記に注記したように、ハンドルアセンブリ210には、ハンドルアセンフリ210と関連する端部エフェクターによって組織に付与される過剰な力に起因する組織への損傷を防ぎ、そして外科用器具の構成要素が使用の間に損傷されるようになる場合、ハンドルアセンフリ210および関連する端部エフェクターへの損傷を防ぐ力制限機構230が提供される。これは、ラック214がハンドルアセンフリ212内の遠位方向運動に対して過剰の抵抗に遭遇するとき起こる。これが起こるとき、ラック214によって遭遇される抵抗力は、つめ224を通じてキャリッジ222に伝達される。キャリッジ222によって遭遇される抵抗性が所定量に上昇するとき、プランジャー232の角度をなす表面300は、キャリッジ222の角度をなす面280に対して滑り始める。プランジャー232は、プランジャーポケット266内でスプリング306の付勢に抗して下方に押される。本明細書で上記に注記したように、ポケット166内でプランジャー232を下方に移動するために必要な力は、スプリング306(単数または複数)に対してほぼ下方に作用する摩擦成分であるキャリッジ222の角度をなす面280と、プランジャー232の角度をなす表面300であって、そしてスプリング306中に存在する所定の抵抗力との間に存在する摩擦係数によって決定される。示されるように、プランジャー232がプランジャーポケット266内で下方に移動するとき、トリガー216の本体部分は、反時計方向に回転し続け、本体部分244の前方タブ264をキャリッジ222の先導エッジ284から分離する。キャリッジ222の弧状面278は、本体部分244の弧状面282とほぼ同じ半径を有するので、トリガー216は取り付けポスト242の周りで旋回を継続し得、その一方、キャリッジ222は静止したままである。ハンドルアセンフリ210は、力制限機構230がトリガー216を解放するとき、ラック214の位置を維持するためのストップまたはその他の機構を含み得る。
【0057】
図12に最も良く示されるように、一旦、プランジャー232がプランジャーポケット266内で完全に下方に移動すると、プランジャー232はキャリッジ222から外され、それ故、トリガー216の本体部分244を、キャリッジ222、そしてそれ故つめ224およびラック214に任意の力を与えることなく自由に回転する。この実施形態では詳細に示されていないけれども、ねじれスプリング250(図8)の付勢に対するトリガー216の解放に際し、本体部分244は時計方向に回転し、本体部分244の前方スロット254をキャリッジ222の先導エッジ284と係合される。これは、トリガー216がキャリッジ222、そしてそれ故つめ224を、ラック214に対して近位方向に駆動するようにし、トリガー216のさらなる起動のためにリセットする。
【0058】
このようにして、力制限機構230は、ハンドルアセンブリ210が起動され、そして組織、またはハンドルアセンブリ210および関連する遠位端部分からなる外科用器具の内部構成要素への損傷なくして関連する遠位端エフェクターを作動するようにする。スプリング306のために適切な強度を選択すること、および/または角度をなす面280と角度をなす表面300について所定の摩擦係数および角度を設計することによって、組織、およびハンドルアセンフリ210の内部構成要素に付与される最大の力が予備決定され得る。
【0059】
本明細書に開示される実施形態に種々の改変がなされ得ることが理解される。例えば、示されるコイルスプリングに代えて異なるタイプのスプリングが置換され得、上記開示されるクラッチ機構を駆動アセンブリに付勢する。さらに、この開示されるクラッチ構成要素の組成および配向は、異なる様式で駆動アセンブリを係合するように改変され得る。さに、開示される駆動アセンブリは、必ずしもラックおよびつめシステムを含む必要はなく、例えば、ギア、モーター駆動システムなどのようなその他の駆動システムに置換され得る。上記力制限機構は、力制限機構のための閾値力を調節するための調節機構を含み得る。この力制限機構は、把持器、クリップ分与器、ステープラー、エネルギーを組織に付与するための外科用器具、またはその他の器具のためのハンドルアセンブリに提供され得る。従って、上記の記載は、制限的であると解釈されるべきではなく、特定の実施形態の単なる例示である。当業者は、本明細書に添付した請求項の範囲および思想内でその他の改変を想定する。
【0060】
(要約)
作動遠位端部分を有する外科用器具との使用のための安全ハンドルアセンブリが開示される。このハンドルアセンブリは、ハンドルハウジング、およびこのハンドルハウジング内に移動可能に取り付けられ、そして関連する作動遠位端部分に連結される駆動要素を含む。駆動アセンブリは、上記ハンドルハウジング内に位置決めされ、そして上記駆動要素と係合可能であり、この駆動要素をハンドルハウジング内で移動する。アクチュエーターがこのハンドルハウジング上に移動可能に取り付けられ、そして調節可能な力制限機構が上記駆動アセンブリとアクチュエーターとの間に配置される。力制限機構は、上記アクチュエーターを駆動アセンブリに離脱可能に連結する。この力制限機構は、上記アクチュエーターが、上記駆動アセンブリから分離または離れる力を予備設定するように調節可能である。
【符号の説明】
【0061】
10 ハンドルアセンブリ
12 ハンドルハウジング
14 駆動ラック
16 トリガー
18 ジャーナル鼻部分
20 駆動アセンブリ
22 上部キャリア
24 つめ
26 遠位リップ
28 歯
30 力制限機構
32 下部キャリア
34 連結ロッド
36 圧力スプリング
38 ポケット
40 調節ねじ
42 ブッシング
44 窓
46 切り抜き
48 突出部
50 傾斜部材
52 ラックリップ
54 ハウジングレール
【特許請求の範囲】
【請求項1】
明細書に記載の発明。
【請求項1】
明細書に記載の発明。
【図2】


【図3】
【図9】
【図12】
【図1】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図3】
【図9】
【図12】
【図1】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【公開番号】特開2013−27722(P2013−27722A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2012−212044(P2012−212044)
【出願日】平成24年9月26日(2012.9.26)
【分割の表示】特願2007−260425(P2007−260425)の分割
【原出願日】平成19年10月3日(2007.10.3)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成24年9月26日(2012.9.26)
【分割の表示】特願2007−260425(P2007−260425)の分割
【原出願日】平成19年10月3日(2007.10.3)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]