
外科用器具のための複数部材相互接続および吸収性ねじファスナー
吸収性ねじファスナー(10)、および目的物を組織に固定するための組織連結を形成するために、組織に外科用ファスナーを付与し得るアプリケーター(100)で発射する方法であって、このファスナーは、らせん状ねじ山(16)を有する本体部分(12)、本体部分の近位端に配置されたヘッド部分(14)を含む。このヘッド部分は、その外側表面上にドライバー受容形態(28)を含む。このねじファスナーは、上記ヘッド部分から上記本体部分の長軸方向長さを通って延びる開口を備えた挿管中央管腔(18)をさらに含む。

【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の引用)
本願は、2003年6月13日に出願された米国仮特許出願番号第60/478,352号の利益およびそれに対する優先権を主張し、その開示は、本明細書によって、本明細書中に参考として援用される。
【背景技術】
【0002】
(発明の背景)
(1.技術分野)
本開示は、一般に、外科用ファスナー、外科用ファスナーアプライヤおよび身体組織を連結するための方法に関し、そしてより詳細には、生体吸収性ねじファスナー、ねじファスナーアプライヤ、および標的手術部位へ複数の吸収性ねじファスナーを発射するためにこのねじファスナーアプライヤを用いる方法に関する。
【0003】
(2.関連技術の説明)
外科用ファスナーは、しばしば時間を浪費しかつ不便である縫合の必要性をなくするために用いられる。外科用ファスナーは、縫合によって達成するには多数の分を要するであろうことを複数秒で達成し、それ故、手術時間および患者への外傷を低減する。ヘルニア修復手順では、例えば、腹腔壁の弱くなった領域は、合成メッシュで、または腹腔組織を縫合することにより強化され得る。このような事例では、吸収性ファスナーの形態の外科用ファスナーが、外科用縫合糸に代えて、またはそれに加えて用いられ得、メッシュを固定する。
【発明の開示】
【発明が解決しようとする課題】
【0004】
外科用ファスナーの広範な使用を考慮すれば、改良された外科用ファスナー、外科用ファスナーアプライヤ、およびこの外科用ファスナーを付与する方法に対する継続する必要性が存在している。
【課題を解決するための手段】
【0005】
(要旨)
従って、本開示は、組織連結を形成するための吸収性ねじファスナーに関し、この吸収性ねじファスナーは、挿入を容易にするために組み合わされた回転力と直線方向力との使用を許容するヘッド形態を有する。この吸収性ねじファスナーは、身体組織中に留められ、組織にメッシュ材料のような目的物を固定するための組織連結を形成する。
【0006】
1つの実施形態では、この吸収性ねじファスナーは、らせん状ねじ山を有する本体部分、この本体部分の近位端に配置されたヘッド部分およびこの本体部分の遠位部分にある平滑末端を含む。このヘッド部分は、その外径上にあるドライバー受容形態を含み、このドライバー受容形態は、上記吸収性ねじファスナーを駆動するために直線方向力および回転力の両方を伝達するために用いられる。この吸収性ねじファスナーは生体吸収性である。この生体吸収性ファスナーの本体部分はねじ山を有し、隣接するねじ山の間の間隔は、増大されてより広いピッチを提供する。さらに、このねじ山の外径は、拡大されて実質的により大きなランドを生成し、この吸収性ねじファスナーにより大きな安定性を与え、そして身体組織からの離脱を防ぐ。この吸収性ねじファスナーは、この吸収性ねじファスナーの本体部分の長軸方向長さを通じて上記ヘッド部分から延びる開口を備えた挿入される中心管腔を含む。このヘッド部分はまた、上記ねじ山の外側にさらに延び得る平坦なセグメントを含む。
【0007】
本発明の主題は、先行技術に対して非常に顕著な利点を達成する。上記ヘッド部分の低いプロフィール(本体部分の約5mmに比較して約1.5mm)は、身体組織への接着を低減する。上記ねじ山の外径を拡大することにより生成されるピッチ形態およびランドは、このファスナーが取り外しに抵抗することを可能にする。最後に、このヘッド部分上のドライバー受容形態は、トルクおよび直線状駆動を許容し、従って、身体組織中へのかなりより少ない挿入力を許容する。
【0008】
本発明のその他の特徴および利点は、本発明の原理を例により示す添付の図面を組合わせて考慮し、以下の詳細な説明から明らかとなる。
【発明を実施するための最良の形態】
【0009】
本開示の実施形態は、図面への参照によってより良好に認識される。
【0010】
(実施形態の詳細な説明)
ここで、制限によるのではなく例示の目的のために含まれる図面を詳細に参照して、本開示の吸収性ねじファスナーが図1〜4に示され、そして、一般に、吸収性ねじファスナー10として指定される。
【0011】
吸収性ねじファスナー10の現在開示される実施形態は、力の最小付与を用いて種々の組織タイプ中にトロカールを通じる吸収性ねじファスナーの挿入を企図する。組織は、代表的には、約7〜10日でメッシュ中に運ばれ、これは、少なくともその間の時間、特定の構造的一体性を維持しなければならないことを意味する。望ましくは、吸収性ねじファスナー10は、約10〜21日の間、約80%までその構造的強度を維持するように構築される。その後、組織は、メッシュ中に増殖し、そしてこの吸収性ねじファスナー10は、固定された速度で身体によって吸収され、メッシュのみがその場に残る。
【0012】
本開示の特有の焦点は、腹腔鏡ヘルニア修復にあるが、ヘルニア修復は、吸収性ねじファスナー10が利用され得る外科的手順の1つのタイプの代表に過ぎないことに注目すべきである。
【0013】
以下の説明では、伝統的であるように、用語「近位」は、操作者に最も近いねじ、アプライヤまたは器具の部分をいい、その一方、用語「遠位」は、操作者から遠隔のねじ、アプライヤまたは器具の部分をいう。
【0014】
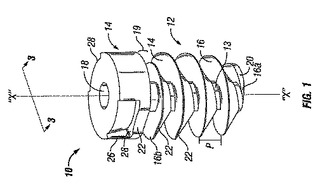
ここで、図1〜4を参照して、吸収性ねじファスナー10は、2つの主要コンポーネント、すなわち、長軸方向軸「X」を規定する本体部分12、および本体部分12の近位端上に配置される実質的に円形のヘッド部分14を含む。吸収性ねじファスナー10は、以下により詳細に記載されるように、本体部分12およびヘッド部分14の長軸方向軸「X」に沿って延びる中央挿入開口部または管腔18をさらに含む。1つの実施形態では、挿入管腔18は、六角形横断方向断面プロフィール(図示せず)を有する。あるいは、挿入管腔18は、円形、矩形または三角形横断方向プロフィールを有し得る。
【0015】
本体部分12は、その長さに沿って延びるらせん状のねじ山16を含み、そしてまた切形または平滑遠位端20を含む。さらに、本体部分12は、その長さに沿って延びる中心シャフト13を含む。中心シャフト13は、一定の外側距離D1およびD2を有し得るか、またはより大きな近位端からより小さな遠位端までテーパー状であり得る。
【0016】
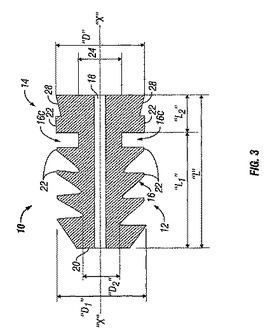
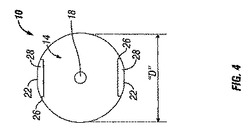
1つの実施形態では、ヘッド部分14は、ねじファスナー10の全体長さ「L」(約6.5278mm)の約54%である距離「D」(約3.51mm)を有する。さらに、本体部分12は、ねじファスナー10の全体長さ「L」の約70〜80%である長さ「L1」を有する。別の実施形態では、長さ「L1」は、全体長さ「L」の約77%である。例えば、ヘッド部分14は、約1.5mmの高さまたは長さ「L2」を有し得、そして本体部分12は、約5.0mmの長さ「L1」を有し得る。なお別の実施形態では、ヘッド部分14の距離「D」は、本体部分12およびらせん状ねじ山16の外側距離「D1」に実質的に等しい。
【0017】
吸収性ねじファスナー10の寸法および物理的特徴は、ねじファスナー10の組織への確実な付着を保証するように選択される。同様に、ねじファスナー10を組織中に分与するために利用されるアプリケーター100(図5)の寸法および物理的特徴は、特定の適用に依存する。
【0018】
図1〜4を続いて参照し、ヘッド部分14は、ヘッド部分14の外側半径方向表面中に形成されたスロット28の形態にあるドライバー受容凹部または構造を含む。スロット28は、ねじファスナー10にトルクを伝達するような形態である。1つの実施形態では、一対の正反対のスロット28が、ヘッド部分14中に形成される。さらに、各スロット28は、近位表面ヘッド部分14から遠位方向に延びる長軸方向「X」軸に向かって所定の角度でテーパー状であり得る。スロット28のこのテーパーは、ねじファスナー10の回転および駆動を容易にすることを支援する。あるいはまたはさらに、トルク伝達特徴は、ショルダー26の形態でスロット28上に、または鍵盤表面の形態(図示せず)で中央に挿管される開口18上に提供され得ることが企図される。本明細書中に記載されるように、このトルク伝達特徴は、ねじファスナー10が回転されることを可能にする。
【0019】
図3を特に参照して、本体部分12は、その上に単一の連続的らせん状ねじ山16を含む。ねじ山16は、その内側距離「D2」と比較したとき実質的に拡大されている外側距離「D1」を含む。内側距離「D2」と比較したとき実質的に拡大された外側距離「D1」を有することは、組織がねじファスナー10の表面により完全かつ親密に接着することを可能にし、その結果、ねじファスナー10の離脱の事例を減少する。ねじ山16は、(図1に見られるように)隣接する個々のねじ山間でピッチ「P」を有する。
【0020】
ねじ山16はまた、望ましくは、遠位導入部16aと近位終結部16bとの両方でテーパー状である。スペースまたはギャップ16cが、近位ねじ山終結部16bとヘッド部分14の遠位表面との間に提供される。ギャップ16cは、その中に外科用メッシュが静止することを可能にする。ねじ山16のピッチが特定の手術手順に依存してより大きいか、またはより小さくあり得ることが想定される。さらに、ねじ山16の断面形状は、三角形、矩形などであり得る。
【0021】
図1〜4に見られるように、ねじファスナー10は、ヘッド部分14およびらせん状ねじ山16の外側表面に形成された、少なくとも1対(3つの対が示されている)の正反対に対向する平面状または平坦化表面22を含む。各平面状の表面22は、個々のスロット28との半径方向位置決めにあり得る。平面状表面22は、ヘッド部分14から本体部分12のらせん状ねじ山16まで、そして実質的に本体部分12の全長に沿って延びる。平面状表面22は、以下に詳細に記載されるように、ファスナーアプライヤ100の内側のねじファスナー10の配向のために提供される。その他の機構が、ファスナーアプライヤ100の内側のねじファスナー10の配向のために提供され得ることが想定される。
【0022】
ねじファスナー10は、例えば、制限されずに、ポリグリコール酸またはポリグリコリド(PGA)および/またはポリ乳酸(PLA)、L1(18/82ポリ−グリコリド−co−L−ラクチド)、L4(42/58ポリ−グリコリド−co−L−ラクチド)、PGB(63/37ポリ−グリコリド−co−トリメチレンカーボネート)、任意のその他の生体適合性の移植可能な材料、またはそれらの任意の組み合わせのような生体吸収性材料から製作され得る。ねじファスナー10は、ねじファスナーが、例えば、約10日間のような所定の時間の間その構造的一体性(例えば、当初の強度の約80%)を維持することを確実にする生体吸収性材料から製作され得る。ねじファスナー10、またはその一部分は、これもまた潤滑性であり、しかもねじファスナー10の組織中へのより容易な送達を提供するパリレン(parylene)のような生体適合性材料で被覆されることがさらに企図される。しかし、より重要なことは、この外科用ファスナー10のより長い吸収時間を作り出すことである。代表的には、このようなねじファスナー10は、当業者によって理解され得るように、射出成型プロセスを用いて形成される。
【0023】
望ましくは、吸収性ねじファスナー10は、複数のファスナーを発射し得るファスナーアプライヤの内視鏡の5mm直径シャフト内に送達され得る。吸収性ねじファスナーの発射で用いられ得るアプライヤのコンポーネントは、米国特許第5,830,221号に示され、かつ説明されており、その全体の開示が参考として本明細書中に援用されている。
【0024】
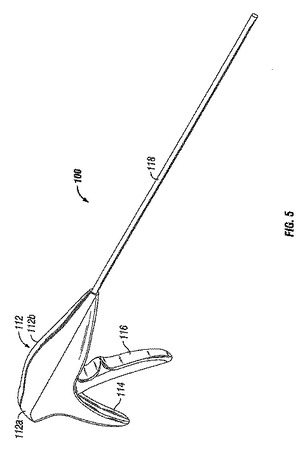
図5および6をここで参照して、吸収性ねじファスナー10を付与するためのファスナーアプライヤは、一般に、ファスナーアプライヤ100として示される。ファスナーアプライヤ100は、一般に、近位ハウジング部分112を含み、これは、2つの別個のハウジング半分体112aと112b、およびハウジング112から延びるハンドル部分114として形成され得る。トリガー116がハウジング112に移動可能にマウントされる。トリガー116は、ハンドル部分114の自由端から間隔を置かれたトリガー116の自由端でハウジング112に回動可能に連結され得る。この配列は、トリガー116とファスナーアプライヤ100の人間工学的利点およびポジティブな固定制御を提供する。ファスナーアプライヤ100はまた、ハウジング112から遠位方向に延びる細長い管状部分118を含む。この細長い管状部分118は、身体組織への適用のために複数のねじファスナー10を保持するために提供される。細長い管状部分118は、身体中の小さな切開を通って挿入される従来の内視鏡チューブまたはカニューレ構造物を通って適合する寸法である。一般に、制御トリガー116の操作は、細長い管状部分118から出て、かつ身体組織中への1つ1つのねじファスナー10の射出を生じる。
【0025】
図6を続いて参照して、ファスナーアプライヤ100のハウジング部分112の操作が説明される。初期または出発位置では、トリガー116は、戻りばね115の力に起因して付勢されてハンドル114から離れる。示されるように、トリガー116のギア部分121の歯117は、トリガーギア123の歯119と係合している。トリガー116が絞られるとき、歯117はトリガーギア123の歯119を係合し、駆動ギア151を回転し、これは、次いで、第1の傾斜駆動ギア153を回転し、これは、次いで、傾斜駆動ギア155を回転し、そして最終的には(図8に見られるように)円筒形ドライバー144、ファスナー保持具142およびパイロット140を回転する。ファスナーアプライヤ100のハウジング部分112の作動の詳細な論議については、本明細書中に先に参考として援用された米国特許第5,830,221号への参照がなされ得る。
【0026】
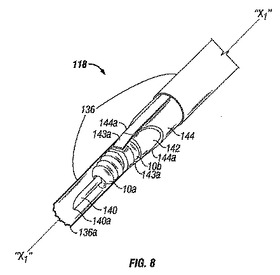
図7〜8を参照して、細長い管状部分118は、長軸方向軸「X1」を規定し、そして円筒形ドライバー144を収容する外側チューブ136を含む。円筒形ドライバー144は、一般に、長軸方向に延びるパイロット140、および円筒形ドライバー144の長さに沿って延びる円筒形ファスナー保持具142を含む。ファスナー保持具142は、その中に複数のねじファスナー10およびパイロット140を、円筒形ドライバー144の回転に際し、ねじファスナー10およびパイロット140が同様に回転するように受容するような形態である。複数のねじファスナー10は、円筒形ドライバー144の遠位部分の長さに沿って長軸方向に連続して配列され得る。各ねじファスナー10は、円筒形ドライバー144のファスナー保持具142内に配置可能である。
【0027】
円筒形ドライバー144は、その最遠位端から延びる一対の対向する弾性フィンガーまたはタブ144aを含む。各弾性フィンガー144aは、長軸方向「X1」軸と角度をなすか、そして/またはそうでなければそれに向かって配向される遠位先端部143aを含む。図8に見られるように、円筒形ドライバー144の弾性フィンガー144aは、最遠位ねじファスナー10aを、付与のための準備の位置に保持またはつまむ。特に、円筒形ドライバー144の各弾性フィンガー144aの遠位先端部143aは、ねじファスナー10のヘッド部分14中に形成された個々のスロット28中に静止可能であるか、またはその中に受容可能である(例えば、図1を参照のこと)。作動において、円筒形ドライバー144は、複数のファスナーを係合し、かつねじファスナー10を組織中に向けること、駆動/進行を容易にするように機能する。
【0028】
外側チューブ136には、さらに、手術部位を覆うメッシュを、このメッシュをその場に固く維持し、そしてこのメッシュが、吸収性ねじファスナー10にトルクが与えられ、そしてこのメッシュを通って駆動される間に、突き出るか、またはそうでなければ回転するかまたは束ねられることを防ぐために係合するため、狭間のついた遠位先端部136aが提供され得る。外側チューブ136の狭間のついた遠位先端部136aは、種々の幾何学的形状および寸法であり得るか(例えば、ギザギザのついた、鋸歯状など)、または完全に省略され得る。
【0029】
パイロット140は、ねじファスナー10の組織中への挿入において支援するためのガイドとして機能する。パイロット140は、ねじファスナー10の挿入の前に上記メッシュおよび下にある標的組織にねじ穴を空けるために鋭の遠位先端部140aを含む。パイロット140の遠位先端部140aは、角度のある先端部を備えて示されている。代替の実施形態では、パイロット140の遠位先端部140aは、種々の幾何学的形状であり得る。図9〜10を参照して、パイロット140上に提供される保持特徴148は、以下に説明されるように、最遠位ねじファスナー10aをその場に保持する。装填された位置では、ファスナーアプライヤ100は、ファスナー保持具142中に、パイロット140がねじファスナー10の挿管開口18を通って延びるように配置されるかまたは保持された少なくとも1つのねじファスナー10を含む。上記で説明されたように、ねじファスナー10のヘッド部分14のスロット28は、円筒形ドライバー144のフィンガー144aの個々の先端部143aによって係合されている。円筒形ドライバー144のフィンガー144aの個々の先端部143aは、ねじファスナー10のヘッド部分14中に形成された個々のスロット28中に係合そして/または受容され得るような形態および寸法である。
【0030】
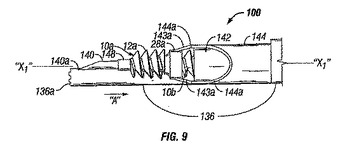
ファスナーアプライヤ100を用いて吸収性ねじファスナー10を挿入する方法がここで論議される。図5、6および9〜17を参照して、外側チューブ136の遠位先端部136aは、最初、上記メッシュおよび/または標的組織に対して配置される。有利には、外側チューブ136の狭間のある先端部136aは、このメッシュに固く係合し、そしてこのメッシュの組織に対する動きを防ぐことを支援する。使用者は、次いで、外側チューブ136の遠位先端部136aをこの標的メッシュまたは組織に対して押す。そのようにすることで、ばね(図示せず)は圧縮され、外側チューブ136が矢印「A」の方向(図9を参照のこと)の近位方向に退却し、そしてそれ故、トリガーロック(図示せず)のロックを解く。
【0031】
図10に見られるように、安全特徴として、パイロット140が、外側チューブ136が完全に退却されるときでさえ、外側チューブ136内に残る。この安全特徴は、パイロット140の遠位端140aでの偶発的な接触または穿刺を防ぐ。
【0032】
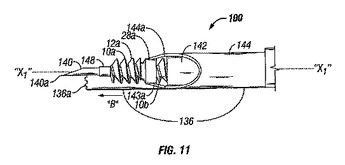
ここで、図6、11および17を参照して、外側チューブ136が完全に退却した位置にあり、ファスナーアプライヤ100は、それからねじファスナー10を発射し得る。ファスナーアプライヤ100からファスナー(単数または複数)10を駆動そして/または発射するために、トリガー116が、戻りばね115の付勢に対してハンドル114の方に引かれる。トリガー116が移動するとき、トリガー116のギア部分121上の歯117が、トリガーギア123の歯119を係合および時計方向に回転し、最終的に、円筒形ドライバー144、ファスナー保持具142およびパイロット140が、図11に示されるように、パイロット140がファスナーアプライヤ100の外側チューブ136の遠位先端部136aを超えて延びるまで(矢印「B」の軸方向に)駆動され、かつ(長軸方向の「X1」軸の周りに)回転されるようにする。1つの実施形態では、パイロット140は、外側チューブ136の遠位先端部136aを超えてほぼ3mmに等しい量だけ延びる。供給ばね145は、プランジャー147に作用し、プランジャー147を最近位ファスナーに対して付勢し、そしてファスナー保持具142内に配置されたねじファスナー10のカラム上で遠位方向に力を維持する。
【0033】
図12に示され、かつ以下により詳細に論議されるように、一旦、パイロット140が遠位方向に移動することを停止すると、円筒形ドライバー144およびファスナー保持具142は、最遠位の吸収性ねじファスナー10aのヘッド部分14が外側チューブ136の遠位先端部136aと実質的に列をなすまで遠位方向に駆動かつ回転され続け、従って、外側チューブ136の遠位先端部136aを超えての最遠位ねじファスナー10aの挿入を防ぐ。図12に示されるように、円筒形ドライバー144は、最遠位ねじファスナー10aを、パイロット140の保持特徴148の上およびそれを超えて完全に駆動かつ回転する。さらに、保持特徴148は、隣接する最遠位ねじファスナー10bが円筒形ドライバー144と係合し、そしてそれによって進行されるまで、隣接する吸収性ねじファスナー10b、隣接する最遠位ねじファスナー10aの遠位進行に対するストップとして作用する。
【0034】
保持特徴148は、挿管管腔18中のCリング、圧縮可能なOリング、クリンプまたはバンプ(図15Aを参照のこと)であり得、ここで、保持特徴148は、ねじファスナー10の挿管管腔18の寸法より大きい初期寸法を有している。従って、最遠位ねじファスナー10aが保持特徴148を初期に係合または接触するとき、保持特徴148は挿管管腔18より大きいサイズであるので、最遠位ねじファスナー10aは、通過することを妨げられる。しかし、最遠位ねじファスナー10aに付与されている力が増加されるとき、保持特徴148は、最遠位ファスナー10aが進行されるとき、挿管管腔18中に押し込められる。最遠位ファスナー10aは、この保持特徴が挿管管腔18を通過し、そしてその近位端から出るように、保持特徴148を横切って完全に押される。最遠位ファスナー10aの背後にある、ねじファスナーのカラムは、次いで、供給ねじ145の力により遠位方向に進行される。しかし、供給ばね145の力は、保持特徴148を次のねじファスナー中に押し込めるに十分大きくはない。従って、保持特徴148は、ねじファスナーのカラムの遠位進行を防ぐ。
【0035】
一旦、トリガー116が完全に押し下げられ、そして最遠位ねじファスナー10aがメッシュを通じて組織中に駆動されると、使用者は、トリガー116を解放し、そして2ステージの放出サイクルが開始する。図13を参照して、ファスナー保持具142がその場に固定されたままである間、円筒形ドライバー144は近位方向(例えば、矢印「C」の方向)に退却される。円筒形ドライバー144は回転されず、そして近位方向に引かれ、その結果、最遠位ファスナー10aは外されない。円筒形ドライバー144が退却されるとき、弾性フィンガー144aは、弾性フィンガー144aがスロット28aのテーパー
上表面の上をスライドするとき半径方向の外側に偏向またはカム運動し、最遠位ねじファスナー10aのヘッド部分14aのスロット28aと脱係合し、そして最遠位ねじファスナー10aを解放する。さらに、円筒形ドライバー144が退却されるとき、弾性フィンガー144aは、ファスナー保持具142とのそれらの相互係合によって半径方向外側にカム運動される。円筒形ドライバー144は、弾性フィンガー144aの最遠位先端部がファスナー保持具142の最遠位エッジと実質的に整列されるまで、退却され得る。
【0036】
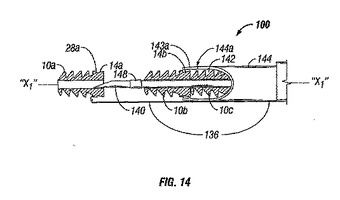
ここで図14を参照して、パイロット140は、パイロット140が外側チューブ136内に、パイロット140の遠位先端部140aがより長く曝されないように配置されるまで、近位方向に退却される。さらに、円筒形ドライバー144およびファスナー保持具142は、円筒形ドライバー144の弾性フィンガー144aの先端部143aが隣接するねじファスナー10bのヘッド部分14b中に形成されたスロット28bと整列されるまで、近位方向に退却される。代替の実施形態では、円筒形ドライバー144およびパイロット140は、互いとは独立に、または同時に退却され得る。
【0037】
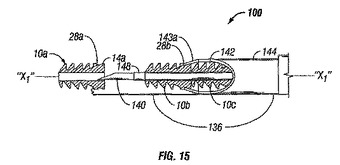
ここで、図15を参照して、ねじファスナー10bが保持特徴148によってその場に維持される間、ファスナー保持具142は、図8に示されるように、その開始位置まで近位方向に引かれ、その結果、円筒形ドライバー144の弾性フィンガー144aの先端部143aは、それらの非偏向位置に戻り、そして隣接ねじファスナー10bのヘッド部分14bのスロット28bを係合する。ファスナー保持具142は、円筒形ドライバー144と比較したとき、その開始位置に戻るためのより長いストロークを有するので、円筒形ドライバー144の弾性フィンガー144aは戻って下に曲がり、そして隣接するねじファスナー10bを係合する。図16を参照して、外側チューブ136は、図9および17に示されるように、その開始位置に戻る。代替の実施形態では、外側チューブ136のその開始位置への遠位移動は、末端使用者によって聞かれる/感じられる可聴および/または触覚応答を伴い得る。代替の実施形態では、円筒形ドライバー144およびファスナー保持具142は、近位方向に一緒に退却し得る。
【0038】
1つの実施形態では、ハウジング112は、再利用可能なハンドル部分114および再滅菌され得るトリガー116、および使い捨て可能な細長い管状部分118を有するように製作され得る。従って、すべてのねじファスナー10の放出に際し、細長い管状部分118は棄てられかつ置換され得、ハウジング部分112は、手順の制限された数まで殺菌および再使用され得る。
【0039】
その他の実施形態では、円筒形ドライバー144を回転させる回転手段は、手によって回転され得る回転子に接続される単一のノブを含み得る。さらに、この回転手段は、ラックおよびギア構造、または1セットの傘ギアを含み得る。
【0040】
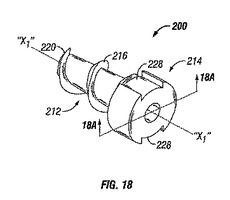
図18、18Aおよび18Bは、吸収性ねじファスナーの別の可能な実施形態を提示する。ねじファスナー200はねじファスナー10と類似であり、そして構成および/または作動における差異を識別するために必要な程度までのみ詳細に論議される。1つの実施形態では、ねじファスナー200の本体部分212は、内側距離「D2」に等しい長さの少なくとも一部分、望ましくはその全長に沿って均一な距離を有している。また、本体部分212の距離「D1」は、狭い平滑遠位端220から、より大きな近位端までテーパー状であり得、そこでは、それは、トルク強度を増加するために近位ヘッド部分214の外径まで遷移する。本体部分212に沿う漸進的なテーパーは、上記メッシュに侵入するときねじファスナー200の小さな足跡を可能にし、そして身体中へのより良好な吸収速度のために本体部分212の長さに沿って半径方向の外側に成長すること、そしてヘッド部分214の外径への次の遷移はトルクに抵抗することを支援する。さらに、ヘッド部分214中に形成されたスロット228は、長軸方向軸「X」に平行であり、そしてヘッド部分214の全厚みに延びる。
【0041】
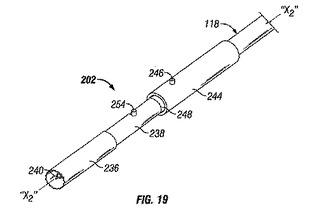
図19〜21を参照して、ねじファスナー10または200の付与のため、またはねじファスナー10または200を保持するために用いられる、ファスナーアプライヤ100の細長い管状部分118の遠位端との係合のための端部エフェクターは、一般に、202として指定される。端部エフェクター202は、その中にファスナー10または200の装填を保持し、そして処理され、もしくは置換され得るか、または殺菌、再装填および再使用され得る、使い捨て可能な装填ユニット(DLU)または単回使用装填ユニット(SULU)の形態をとり得る。
【0042】
最初に図19〜21を参照して、端部エフェクター202は、長軸方向軸「X2」を規定し、そしてその中にねじファスナー200を保持するための内側チューブアセンブリ238を収容する外側チューブ236、管状部分118の遠位端上に支持されるカム螺旋ドライバー244、ピン254、および内側チューブアセンブリ238内に配置され、かつカム螺旋ドライブ244に作動可能に接続されるカム螺旋サブアセンブリ248を含む。
【0043】
端部エフェクター202は、ファスナーアプライヤ100の細長い管状部分118の遠位端に付着されるか、またはそれと一体に形成され、その結果、ファスナーアプライヤ100の制御トリガー116がハンドル114に向かって引かれるとき、カム螺旋ドライバー244は(上記に記載された円筒形ドライバー144の回転と同様に)回転する。カム螺旋サブアセンブリ248は、カム螺旋ドライバー244のピン246と嵌合し、かつそれを受容するらせん状ねじ山248aを含み、その結果、カム螺旋ドライバー244が回転するとき、カム螺旋サブアセンブリ248は、本明細書で以下により詳細に論議されるように、回転し、かつ平行移動する。
【0044】
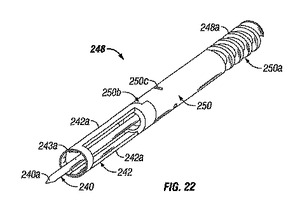
図22および23を参照して、カム螺旋サブアセンブリ248が詳細に論議される。カム螺旋サブアセンブリ248は、らせん状ねじ山248aを規定する近位端250aを有するカム螺旋250、カム螺旋250の遠位端250bから長軸方向に延びるパイロット240、およびカム螺旋250の遠位端250b上に作動可能に支持されるファスナー保持具242を含む。カム螺旋サブアセンブリ248は、カム螺旋250の回転に際し、パイロット240およびファスナー保持具242が同様に回転されるような様式でアセンブルされる。代替の実施形態では、カム螺旋サブアセンブリ248は、単一パーツ/コンポーネントとして製作され得る。ファスナー保持具242は、ねじファスナー200の保持具またはガイドとして作用する、一対の対向する長軸方向に延びるレール242aを含み得る。レール242aの遠位端243aはまた、本明細書中以下に説明されるように、ねじファスナー200のためのドライバーとして作用する。望ましくは、パイロット240の遠位端240aは、レール242aの遠位端243aおよびファスナー保持具242の遠位方向に延びる。ピン254(例えば、図21を参照のこと)は、カム螺旋250中に形成されたスロット250c中に受容され、そしてそれから半径方向に延びる。
【0045】
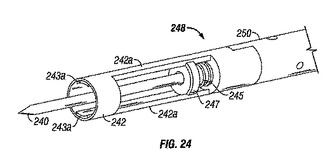
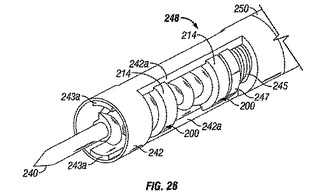
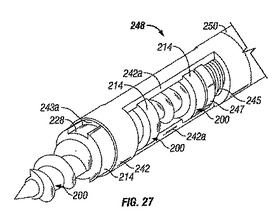
図24〜27に見られるように、カム螺旋サブアセンブリ248は、供給ばね245およびねじファスナープッシャー247をさらに含み、各々は、パイロット240上に、かつファスナー保持具242内に配置される。図25〜27に示されるように、ファスナー保持具242のレール242aは、ねじファスナー200を、ねじファスナー200のヘッド部分214中の個々のスロット228と係合することにより配向する。望ましくは、供給ばね245は、ねじファスナープッシャー247とカム螺旋250との間に配置される。従って、供給ばね245は、プッシャー247を遠位方向に付勢する。
【0046】
複数のねじファスナー200は、カム螺旋サブアセンブリ248中に保持され得るか、またはそれと作動可能に連結され得、例えば、図25中に見られるように一つ(1)、図26中に見られるように二つ(2)、または図27中に見られるように三つ(3)である。1〜3のねじファスナー200が図25〜27に示されているが、本発明のデバイスが任意の数のねじファスナー200と用いられ得るか、またはそれらを収容し得ることが理解される。
【0047】
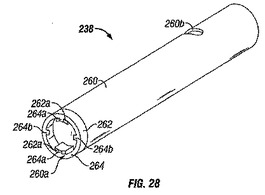
ここで、図28を参照して、代替の実施形態では、またはさらに、内側チューブサブアセンブリ238は、円筒形本体260、その遠位端260aに作動可能に連結されたトルクリング262、およびトルクリング262に作動可能に連結された保持リング264を含む。円筒形本体260は、カム螺旋250から延びるピン254をスライド可能に受容するためにその中に形成された横方向配向された回転スロット260bを含む。回転スロット260bは、ピン254の動きを、そして次にカム螺旋ドライバー244の回転を制限する。回転スロット260bは、上記回転を約90゜に制限するようなサイズであり得る。図28への参照を続けて、トルクリング262は、それから半径方向の内側に延びる一対の正反対に対向する係合特徴262aを含む。係合特徴262aは、望ましくは、ねじファスナー200のヘッド部分214の対応するスロット228と嵌合するサイズである。保持リング264は、それから半径方向の内側に延びる2対の正反対に対向するタブ264a、264bを含む。タブ264a、264bは、互いに対して約90゜オフセットされ得る。望ましくは、一対のタブ264aが、トルクリング262の係合特徴262aと軸方向に整列される。タブ264a、264bは、遠位ねじファスナー200をその場に保持し、そしてカム螺旋サブアセンブリ248供給ばね245が、1つの迅速な発射シークエンスにある器具から、すべての内部ねじファスナー200を外に駆動することを防ぐ。
【0048】
内側チューブサブアセンブリ238は、互いにマウントされるか、またはそうでなければ作動可能に連結されて単一の内側チューブサブアセンブリ238を形成するいくつかの異なるコンポーネントから構築され得るか、または単一のコンポーネントとして製造され得る。
【0049】
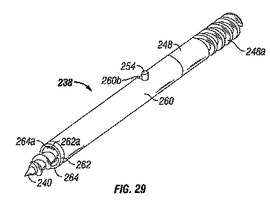
ここで、図29および30を参照して、内側チューブサブアセンブリ238が、カム螺旋サブアセンブリ248と作動可能に連結されて(例えば、その上に回転可能に支持される)示される。上記のように、ピン254は、内側チューブサブアセンブリ238の回転スロット260bを通って延びる。従って、内側チューブサブアセンブリ238およひカム螺旋サブアセンブリ248は、以下により詳細に説明されるように、カム螺旋サブアセンブリ248が能動化されるとき、1つのユニットとして作用する。
【0050】
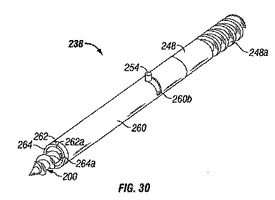
図29では、内側チューブサブアセンブリ238は、カム螺旋サブアセンブリ248に対する第1の位置に示され、そしてピン254は、回転スロット260の1つの端部に位置する。図30では、内側チューブサブアセンブリは、カム螺旋サブアセンブリ248に対する第2の位置で示され、そしてピン254は、回転スロット260の反対側の端部に位置する。
【0051】
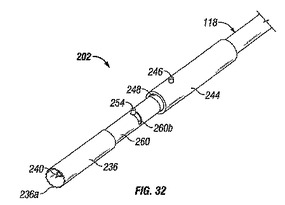
ここで、図31〜36を参照し、吸収性ねじファスナー200または10を挿入する方法が論議される。図32および33を参照して、外側チューブ236の(狭間のある)遠位先端部236aは、最初、メッシュおよび/または標的組織に対して配置される。そのようにすることで、外側チューブ236の遠位先端部236aは、このメッシュに強固に接続された外側チューブ236を維持し、およびこのメッシュを密接に保つことを補助する。
【0052】
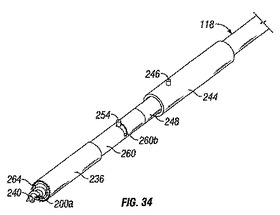
次いで、上記ファスナーアプライヤのトリガーが能動化され(例えば、握られる)カム螺旋ドライバー244を回転し、そしてカム螺旋サブアセンブリ248および内側チューブサブアセンブリ238を回転かつ移す。外側チューブ236を静止位置に保持し、最遠位ねじファスナー200aは、図34および35に示されるように、遠位方向に進行される。特に、カム螺旋サブアセンブリ248は回転かつ並進して最遠位ねじファスナー200aを前方に駆動し、内側チューブサブアセンブリ238は、最遠位ねじファスナー200aを回転する。
【0053】
図36に見られるように、カム螺旋サブアセンブリ248(図34を参照のこと)は、遠位ねじファスナー200aを、保持リング264のタブ264b(図28を参照のこと)を超えて遠位ねじファスナー200aを押すに十分な量駆動し、そしてそれ故、上記ファスナーアプライヤの残りから最遠位ねじファスナー200aを解放する。
【0054】
望ましくは、このファスナーアプライヤのトリガーが解放されるとき、すべての内部サブアセンブリは退却かつそれら自身を再配向し、それ故、供給ばね245が次のねじファスナーをトルクリング254中に進行させることを可能にする。
【0055】
ここで、図37および38を参照して、吸収性ねじファスナーの別の可能な実施形態が、一般に300として示される。ねじファスナー300は、ねじファスナー10に類似であり、そして構築および/または作動における差異を識別するために必要な程度までのみが論議される。
【0056】
ねじファスナー300は、長軸方向軸「X」を規定する本体部分312、および本体部分312の近位端上に配置された実質的に円形のヘッド部分314を含む。本体部分312は、その長さに沿って延び、そして遠位端320で終了するらせん状ねじ山316を含む。現在の実施形態では、らせん状ねじ山316は、挿入目的の容易さのために遠位端で接触までテーパー状である。らせん状ねじ山316の近位端は、ヘッド部分314の遠位表面前で停止し、メッシュ(図示せず)が受容され得るギャップ316cを生成する。
【0057】
本体部分312の遠位端320は、角度Θだけ上記「X」軸に対して角度をなす遠位表面320aを規定する。1つの実施形態では、遠位表面320aの角度Θは、上記「X」軸に直交する軸「Y」に対して約5゜〜約15゜である。なお別の実施形態では、角度Θは約9゜である。さらに、本体部分312は、その長さに沿って延びる中央シャフト313を含む。1つの実施形態では、中央シャフト313はテーパー状であり、ねじファスナー300の挿入の容易さを増加するためにより小さな遠位端およびより大きな近位端を有する。
【0058】
図37および38を続いて参照し、ヘッド部分314は、ヘッド部分314の外側半径方向表面中に形成された、スロット328の形態にある、ドライバー受容凹部または構造を含む。スロット328は、ねじファスナー300にトルクを伝達するような形態である。1つの実施形態では、一対の正反対に対向するスロット328が、ヘッド部分314中に形成される。各スロット328は、長軸方向の「X」軸に平行であり得、そしてヘッド部分314の遠位表面314aおよび近位表面314bを通じて延びる。スロット328は、ねじファスナー300の全長を延び、らせん状ねじ山316中に形成された対応するスロット328a−328dを規定する。
【0059】
1つの実施形態では、ヘッド部分314は低プロフィールを有し、すなわち、ヘッド部分314は、約1.5mmである長さ「L2」、および約3.81mmの距離を有する。また、本体部分312は約5.0mmである長さ「L1」を有し得る。従って、ねじ300の全体の長さ「L」は約6.5mmである。
【0060】
あるいは、またはさらに、トルク伝達特徴が、ショルダー326の形態で、スロット328上に提供され得ることが想定され、このトルク伝達特徴は、ねじファスナー300が回転されることを可能にする。
【0061】
遠位表面314aはまた、示されるように、上記「X」軸に対して角度Φだけ角度をなし得る。1つの実施形態では、遠位表面314aの角度Φは、上記「X」軸に直交する軸「Y」に対して約5゜〜約15゜である。なお別の実施形態では角度Φは約9゜である。遠位表面314aの角度は、ねじファスナー300が手術部位から除去される必要があるとき、ねじファスナー300の除去を補助するために提供される。
【0062】
スペースまたはギャップ316cは、近位ねじ山突出とヘッド部分314の遠位表面314aとの間に提供され得る。ギャップ316cは、外科用メッシュがその中に静止するとを可能にする。ねじ山316のピッチは、特定の手術手順に依存してより大きくまたはより小さくあり得ることが想定される。
【0063】
図37に見られるように、各スロット328a〜328dは、半径のある遠位または先導エッジ329aおよび半径のある近位または追従エッジ329bを含む。半径のある先導エッジ329aおよび半径のある追従エッジ329bは、手術部位中への、および手術部位からのねじファスナー300の挿入および除去を容易にすることを-補助する。
【0064】
先行する記載から、本発明のねじファスナーおよびファスナーアプライヤは、協働して、ファスナーを高い保持表面積とともに、1つの方向からより単純な設計を有するファスナーアプライヤの利用により組織に固く付着する。本発明は、組織を連結すること、ヘルニアメッシュ修復、膀胱頸部懸垂法、関節鏡膝手術、および患者中に外科用デバイスまたは移植可能なデバイスを位置決めすることを含むインプラント薬物送達システムとの組み合わせを含む多くの適用で利用され得る。
【0065】
本発明のいくつかの形態を示し、かつ説明してきたが、種々の改変が本発明の思想および範囲から逸脱することなくなされ得ることもまた明らかである。
【0066】
従って、本発明の形態、詳細および適用における種々の変化が、本発明の思想および範囲から逸脱することなくなされ得ることが理解されるべきである。
【図面の簡単な説明】
【0067】
【図1】図1は、本開示の実施形態による吸収性ねじファスナーの斜視図である。
【図2】図2は、図1の吸収性ねじファスナーの別の斜視図である。
【図3】図3は、図1の直線3−3に沿ってとった図1の吸収性ねじファスナーの長軸方向断面図である。
【図4】図4は、図3の吸収性ねじファスナーの正平面である。
【図5】図5は、本開示の実施形態によるねじファスナーアプライヤの実施形態の斜視図である。
【図6】図6は、初期位置にある間の図5のねじファスナーアプライヤのハウジング部分のハウジングの半分を取り除いた側面図である。
【図7】図7は、図5のねじファスナーアプライヤの遠位端の斜視図である。
【図8】図8は、図5および6のねじファスナーアプライヤの遠位端の斜視部分断面図である。
【図9】図9は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの一連の操作ステップを示す。
【図10】図10は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの一連の操作ステップを示す。
【図11】図11は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの一連の操作ステップを示す。
【図12】図12は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図13】図13は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図14】図14は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図15】図15は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図16】図16は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図17】図16は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図18】図18は、本開示の吸収性ねじファスナーの別の実施形態の斜視図である。
【図18A】図18Aは、図18の線18A−18Aに沿ってとった図18の吸収性ねじファスナーの長軸方向断面図である。
【図18B】図18Bは、図18および18Aの吸収性ねじファスナーの平面図である。
【図19】図19は、本開示の別の実施形態によりねじファスナーアプライヤの遠位端の、それに作動可能に固定された端部エフェクターとともに示す斜視図である。
【図20】図20は、図19のねじファスナーアプライヤの遠位端の、それから分離または脱連結された端部エフェクターとともに示す斜視図である。
【図21】図21は、本開示によるアセンブルされた、カム螺旋サブアセンブリ、内側チューブサブアセンブリおよび端部エフェクターの外側チューブの斜視図である。
【図22】図22は、図21の端部エフェクターのカム螺旋状サブアセンブリの、それから外側チューブおよび内側チューブサブアセンブリを取り除いて示す斜視図である。
【図23】図23は、図22のカム螺旋サブアセンブリのさらなる斜視図である。
【図24】図24は、図22および23のカム螺旋サブアセンブリの、それと作動可能に連結されて示されるプッシャーおよびフィードばねとともに示す斜視図である。
【図25】図25は、図24のカム螺旋サブアセンブリの斜視図であり、それと作動可能に連結されたねじファスナーを示す。
【図26】図26は、図24および25のカム螺旋サブアセンブリの、それと作動可能に連結された一対のねじファスナーとともに示す斜視図である。
【図27】図27は、図24〜26のカム螺旋サブアセンブリの、それと作動可能に連結された少なくとも3つのねじファスナーとともに示す斜視図である。
【図28】図28は、図21および28の端部エフェクターの内側チューブサブアセンブリの斜視図である。
【図29】図29は、図28の内側チューブサブアセンブリ内に作動可能に配置された、第1の位置にある間の図27のカム螺旋サブアセンブリの斜視図である。
【図30】図30は、第2の位置にある間の、図29のカム螺旋サブアセンブリおよび内側チューブサブアセンブリの斜視図である。
【図31】図31は、図27のカム螺旋サブアセンブリの、図30の第2の位置にある間の斜視図である。
【図32】図32は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図33】図33は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図34】図34は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図35】図35は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図36】図36は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図37】図37は、本開示のさらなる実施形態による吸収性ねじファスナーの断面側面斜視図である。
【図38】図38は、図37の線38−38に沿ってとった図37の吸収性ねじファスナーの長軸方向断面図である。
【技術分野】
【0001】
(関連出願の引用)
本願は、2003年6月13日に出願された米国仮特許出願番号第60/478,352号の利益およびそれに対する優先権を主張し、その開示は、本明細書によって、本明細書中に参考として援用される。
【背景技術】
【0002】
(発明の背景)
(1.技術分野)
本開示は、一般に、外科用ファスナー、外科用ファスナーアプライヤおよび身体組織を連結するための方法に関し、そしてより詳細には、生体吸収性ねじファスナー、ねじファスナーアプライヤ、および標的手術部位へ複数の吸収性ねじファスナーを発射するためにこのねじファスナーアプライヤを用いる方法に関する。
【0003】
(2.関連技術の説明)
外科用ファスナーは、しばしば時間を浪費しかつ不便である縫合の必要性をなくするために用いられる。外科用ファスナーは、縫合によって達成するには多数の分を要するであろうことを複数秒で達成し、それ故、手術時間および患者への外傷を低減する。ヘルニア修復手順では、例えば、腹腔壁の弱くなった領域は、合成メッシュで、または腹腔組織を縫合することにより強化され得る。このような事例では、吸収性ファスナーの形態の外科用ファスナーが、外科用縫合糸に代えて、またはそれに加えて用いられ得、メッシュを固定する。
【発明の開示】
【発明が解決しようとする課題】
【0004】
外科用ファスナーの広範な使用を考慮すれば、改良された外科用ファスナー、外科用ファスナーアプライヤ、およびこの外科用ファスナーを付与する方法に対する継続する必要性が存在している。
【課題を解決するための手段】
【0005】
(要旨)
従って、本開示は、組織連結を形成するための吸収性ねじファスナーに関し、この吸収性ねじファスナーは、挿入を容易にするために組み合わされた回転力と直線方向力との使用を許容するヘッド形態を有する。この吸収性ねじファスナーは、身体組織中に留められ、組織にメッシュ材料のような目的物を固定するための組織連結を形成する。
【0006】
1つの実施形態では、この吸収性ねじファスナーは、らせん状ねじ山を有する本体部分、この本体部分の近位端に配置されたヘッド部分およびこの本体部分の遠位部分にある平滑末端を含む。このヘッド部分は、その外径上にあるドライバー受容形態を含み、このドライバー受容形態は、上記吸収性ねじファスナーを駆動するために直線方向力および回転力の両方を伝達するために用いられる。この吸収性ねじファスナーは生体吸収性である。この生体吸収性ファスナーの本体部分はねじ山を有し、隣接するねじ山の間の間隔は、増大されてより広いピッチを提供する。さらに、このねじ山の外径は、拡大されて実質的により大きなランドを生成し、この吸収性ねじファスナーにより大きな安定性を与え、そして身体組織からの離脱を防ぐ。この吸収性ねじファスナーは、この吸収性ねじファスナーの本体部分の長軸方向長さを通じて上記ヘッド部分から延びる開口を備えた挿入される中心管腔を含む。このヘッド部分はまた、上記ねじ山の外側にさらに延び得る平坦なセグメントを含む。
【0007】
本発明の主題は、先行技術に対して非常に顕著な利点を達成する。上記ヘッド部分の低いプロフィール(本体部分の約5mmに比較して約1.5mm)は、身体組織への接着を低減する。上記ねじ山の外径を拡大することにより生成されるピッチ形態およびランドは、このファスナーが取り外しに抵抗することを可能にする。最後に、このヘッド部分上のドライバー受容形態は、トルクおよび直線状駆動を許容し、従って、身体組織中へのかなりより少ない挿入力を許容する。
【0008】
本発明のその他の特徴および利点は、本発明の原理を例により示す添付の図面を組合わせて考慮し、以下の詳細な説明から明らかとなる。
【発明を実施するための最良の形態】
【0009】
本開示の実施形態は、図面への参照によってより良好に認識される。
【0010】
(実施形態の詳細な説明)
ここで、制限によるのではなく例示の目的のために含まれる図面を詳細に参照して、本開示の吸収性ねじファスナーが図1〜4に示され、そして、一般に、吸収性ねじファスナー10として指定される。
【0011】
吸収性ねじファスナー10の現在開示される実施形態は、力の最小付与を用いて種々の組織タイプ中にトロカールを通じる吸収性ねじファスナーの挿入を企図する。組織は、代表的には、約7〜10日でメッシュ中に運ばれ、これは、少なくともその間の時間、特定の構造的一体性を維持しなければならないことを意味する。望ましくは、吸収性ねじファスナー10は、約10〜21日の間、約80%までその構造的強度を維持するように構築される。その後、組織は、メッシュ中に増殖し、そしてこの吸収性ねじファスナー10は、固定された速度で身体によって吸収され、メッシュのみがその場に残る。
【0012】
本開示の特有の焦点は、腹腔鏡ヘルニア修復にあるが、ヘルニア修復は、吸収性ねじファスナー10が利用され得る外科的手順の1つのタイプの代表に過ぎないことに注目すべきである。
【0013】
以下の説明では、伝統的であるように、用語「近位」は、操作者に最も近いねじ、アプライヤまたは器具の部分をいい、その一方、用語「遠位」は、操作者から遠隔のねじ、アプライヤまたは器具の部分をいう。
【0014】
ここで、図1〜4を参照して、吸収性ねじファスナー10は、2つの主要コンポーネント、すなわち、長軸方向軸「X」を規定する本体部分12、および本体部分12の近位端上に配置される実質的に円形のヘッド部分14を含む。吸収性ねじファスナー10は、以下により詳細に記載されるように、本体部分12およびヘッド部分14の長軸方向軸「X」に沿って延びる中央挿入開口部または管腔18をさらに含む。1つの実施形態では、挿入管腔18は、六角形横断方向断面プロフィール(図示せず)を有する。あるいは、挿入管腔18は、円形、矩形または三角形横断方向プロフィールを有し得る。
【0015】
本体部分12は、その長さに沿って延びるらせん状のねじ山16を含み、そしてまた切形または平滑遠位端20を含む。さらに、本体部分12は、その長さに沿って延びる中心シャフト13を含む。中心シャフト13は、一定の外側距離D1およびD2を有し得るか、またはより大きな近位端からより小さな遠位端までテーパー状であり得る。
【0016】
1つの実施形態では、ヘッド部分14は、ねじファスナー10の全体長さ「L」(約6.5278mm)の約54%である距離「D」(約3.51mm)を有する。さらに、本体部分12は、ねじファスナー10の全体長さ「L」の約70〜80%である長さ「L1」を有する。別の実施形態では、長さ「L1」は、全体長さ「L」の約77%である。例えば、ヘッド部分14は、約1.5mmの高さまたは長さ「L2」を有し得、そして本体部分12は、約5.0mmの長さ「L1」を有し得る。なお別の実施形態では、ヘッド部分14の距離「D」は、本体部分12およびらせん状ねじ山16の外側距離「D1」に実質的に等しい。
【0017】
吸収性ねじファスナー10の寸法および物理的特徴は、ねじファスナー10の組織への確実な付着を保証するように選択される。同様に、ねじファスナー10を組織中に分与するために利用されるアプリケーター100(図5)の寸法および物理的特徴は、特定の適用に依存する。
【0018】
図1〜4を続いて参照し、ヘッド部分14は、ヘッド部分14の外側半径方向表面中に形成されたスロット28の形態にあるドライバー受容凹部または構造を含む。スロット28は、ねじファスナー10にトルクを伝達するような形態である。1つの実施形態では、一対の正反対のスロット28が、ヘッド部分14中に形成される。さらに、各スロット28は、近位表面ヘッド部分14から遠位方向に延びる長軸方向「X」軸に向かって所定の角度でテーパー状であり得る。スロット28のこのテーパーは、ねじファスナー10の回転および駆動を容易にすることを支援する。あるいはまたはさらに、トルク伝達特徴は、ショルダー26の形態でスロット28上に、または鍵盤表面の形態(図示せず)で中央に挿管される開口18上に提供され得ることが企図される。本明細書中に記載されるように、このトルク伝達特徴は、ねじファスナー10が回転されることを可能にする。
【0019】
図3を特に参照して、本体部分12は、その上に単一の連続的らせん状ねじ山16を含む。ねじ山16は、その内側距離「D2」と比較したとき実質的に拡大されている外側距離「D1」を含む。内側距離「D2」と比較したとき実質的に拡大された外側距離「D1」を有することは、組織がねじファスナー10の表面により完全かつ親密に接着することを可能にし、その結果、ねじファスナー10の離脱の事例を減少する。ねじ山16は、(図1に見られるように)隣接する個々のねじ山間でピッチ「P」を有する。
【0020】
ねじ山16はまた、望ましくは、遠位導入部16aと近位終結部16bとの両方でテーパー状である。スペースまたはギャップ16cが、近位ねじ山終結部16bとヘッド部分14の遠位表面との間に提供される。ギャップ16cは、その中に外科用メッシュが静止することを可能にする。ねじ山16のピッチが特定の手術手順に依存してより大きいか、またはより小さくあり得ることが想定される。さらに、ねじ山16の断面形状は、三角形、矩形などであり得る。
【0021】
図1〜4に見られるように、ねじファスナー10は、ヘッド部分14およびらせん状ねじ山16の外側表面に形成された、少なくとも1対(3つの対が示されている)の正反対に対向する平面状または平坦化表面22を含む。各平面状の表面22は、個々のスロット28との半径方向位置決めにあり得る。平面状表面22は、ヘッド部分14から本体部分12のらせん状ねじ山16まで、そして実質的に本体部分12の全長に沿って延びる。平面状表面22は、以下に詳細に記載されるように、ファスナーアプライヤ100の内側のねじファスナー10の配向のために提供される。その他の機構が、ファスナーアプライヤ100の内側のねじファスナー10の配向のために提供され得ることが想定される。
【0022】
ねじファスナー10は、例えば、制限されずに、ポリグリコール酸またはポリグリコリド(PGA)および/またはポリ乳酸(PLA)、L1(18/82ポリ−グリコリド−co−L−ラクチド)、L4(42/58ポリ−グリコリド−co−L−ラクチド)、PGB(63/37ポリ−グリコリド−co−トリメチレンカーボネート)、任意のその他の生体適合性の移植可能な材料、またはそれらの任意の組み合わせのような生体吸収性材料から製作され得る。ねじファスナー10は、ねじファスナーが、例えば、約10日間のような所定の時間の間その構造的一体性(例えば、当初の強度の約80%)を維持することを確実にする生体吸収性材料から製作され得る。ねじファスナー10、またはその一部分は、これもまた潤滑性であり、しかもねじファスナー10の組織中へのより容易な送達を提供するパリレン(parylene)のような生体適合性材料で被覆されることがさらに企図される。しかし、より重要なことは、この外科用ファスナー10のより長い吸収時間を作り出すことである。代表的には、このようなねじファスナー10は、当業者によって理解され得るように、射出成型プロセスを用いて形成される。
【0023】
望ましくは、吸収性ねじファスナー10は、複数のファスナーを発射し得るファスナーアプライヤの内視鏡の5mm直径シャフト内に送達され得る。吸収性ねじファスナーの発射で用いられ得るアプライヤのコンポーネントは、米国特許第5,830,221号に示され、かつ説明されており、その全体の開示が参考として本明細書中に援用されている。
【0024】
図5および6をここで参照して、吸収性ねじファスナー10を付与するためのファスナーアプライヤは、一般に、ファスナーアプライヤ100として示される。ファスナーアプライヤ100は、一般に、近位ハウジング部分112を含み、これは、2つの別個のハウジング半分体112aと112b、およびハウジング112から延びるハンドル部分114として形成され得る。トリガー116がハウジング112に移動可能にマウントされる。トリガー116は、ハンドル部分114の自由端から間隔を置かれたトリガー116の自由端でハウジング112に回動可能に連結され得る。この配列は、トリガー116とファスナーアプライヤ100の人間工学的利点およびポジティブな固定制御を提供する。ファスナーアプライヤ100はまた、ハウジング112から遠位方向に延びる細長い管状部分118を含む。この細長い管状部分118は、身体組織への適用のために複数のねじファスナー10を保持するために提供される。細長い管状部分118は、身体中の小さな切開を通って挿入される従来の内視鏡チューブまたはカニューレ構造物を通って適合する寸法である。一般に、制御トリガー116の操作は、細長い管状部分118から出て、かつ身体組織中への1つ1つのねじファスナー10の射出を生じる。
【0025】
図6を続いて参照して、ファスナーアプライヤ100のハウジング部分112の操作が説明される。初期または出発位置では、トリガー116は、戻りばね115の力に起因して付勢されてハンドル114から離れる。示されるように、トリガー116のギア部分121の歯117は、トリガーギア123の歯119と係合している。トリガー116が絞られるとき、歯117はトリガーギア123の歯119を係合し、駆動ギア151を回転し、これは、次いで、第1の傾斜駆動ギア153を回転し、これは、次いで、傾斜駆動ギア155を回転し、そして最終的には(図8に見られるように)円筒形ドライバー144、ファスナー保持具142およびパイロット140を回転する。ファスナーアプライヤ100のハウジング部分112の作動の詳細な論議については、本明細書中に先に参考として援用された米国特許第5,830,221号への参照がなされ得る。
【0026】
図7〜8を参照して、細長い管状部分118は、長軸方向軸「X1」を規定し、そして円筒形ドライバー144を収容する外側チューブ136を含む。円筒形ドライバー144は、一般に、長軸方向に延びるパイロット140、および円筒形ドライバー144の長さに沿って延びる円筒形ファスナー保持具142を含む。ファスナー保持具142は、その中に複数のねじファスナー10およびパイロット140を、円筒形ドライバー144の回転に際し、ねじファスナー10およびパイロット140が同様に回転するように受容するような形態である。複数のねじファスナー10は、円筒形ドライバー144の遠位部分の長さに沿って長軸方向に連続して配列され得る。各ねじファスナー10は、円筒形ドライバー144のファスナー保持具142内に配置可能である。
【0027】
円筒形ドライバー144は、その最遠位端から延びる一対の対向する弾性フィンガーまたはタブ144aを含む。各弾性フィンガー144aは、長軸方向「X1」軸と角度をなすか、そして/またはそうでなければそれに向かって配向される遠位先端部143aを含む。図8に見られるように、円筒形ドライバー144の弾性フィンガー144aは、最遠位ねじファスナー10aを、付与のための準備の位置に保持またはつまむ。特に、円筒形ドライバー144の各弾性フィンガー144aの遠位先端部143aは、ねじファスナー10のヘッド部分14中に形成された個々のスロット28中に静止可能であるか、またはその中に受容可能である(例えば、図1を参照のこと)。作動において、円筒形ドライバー144は、複数のファスナーを係合し、かつねじファスナー10を組織中に向けること、駆動/進行を容易にするように機能する。
【0028】
外側チューブ136には、さらに、手術部位を覆うメッシュを、このメッシュをその場に固く維持し、そしてこのメッシュが、吸収性ねじファスナー10にトルクが与えられ、そしてこのメッシュを通って駆動される間に、突き出るか、またはそうでなければ回転するかまたは束ねられることを防ぐために係合するため、狭間のついた遠位先端部136aが提供され得る。外側チューブ136の狭間のついた遠位先端部136aは、種々の幾何学的形状および寸法であり得るか(例えば、ギザギザのついた、鋸歯状など)、または完全に省略され得る。
【0029】
パイロット140は、ねじファスナー10の組織中への挿入において支援するためのガイドとして機能する。パイロット140は、ねじファスナー10の挿入の前に上記メッシュおよび下にある標的組織にねじ穴を空けるために鋭の遠位先端部140aを含む。パイロット140の遠位先端部140aは、角度のある先端部を備えて示されている。代替の実施形態では、パイロット140の遠位先端部140aは、種々の幾何学的形状であり得る。図9〜10を参照して、パイロット140上に提供される保持特徴148は、以下に説明されるように、最遠位ねじファスナー10aをその場に保持する。装填された位置では、ファスナーアプライヤ100は、ファスナー保持具142中に、パイロット140がねじファスナー10の挿管開口18を通って延びるように配置されるかまたは保持された少なくとも1つのねじファスナー10を含む。上記で説明されたように、ねじファスナー10のヘッド部分14のスロット28は、円筒形ドライバー144のフィンガー144aの個々の先端部143aによって係合されている。円筒形ドライバー144のフィンガー144aの個々の先端部143aは、ねじファスナー10のヘッド部分14中に形成された個々のスロット28中に係合そして/または受容され得るような形態および寸法である。
【0030】
ファスナーアプライヤ100を用いて吸収性ねじファスナー10を挿入する方法がここで論議される。図5、6および9〜17を参照して、外側チューブ136の遠位先端部136aは、最初、上記メッシュおよび/または標的組織に対して配置される。有利には、外側チューブ136の狭間のある先端部136aは、このメッシュに固く係合し、そしてこのメッシュの組織に対する動きを防ぐことを支援する。使用者は、次いで、外側チューブ136の遠位先端部136aをこの標的メッシュまたは組織に対して押す。そのようにすることで、ばね(図示せず)は圧縮され、外側チューブ136が矢印「A」の方向(図9を参照のこと)の近位方向に退却し、そしてそれ故、トリガーロック(図示せず)のロックを解く。
【0031】
図10に見られるように、安全特徴として、パイロット140が、外側チューブ136が完全に退却されるときでさえ、外側チューブ136内に残る。この安全特徴は、パイロット140の遠位端140aでの偶発的な接触または穿刺を防ぐ。
【0032】
ここで、図6、11および17を参照して、外側チューブ136が完全に退却した位置にあり、ファスナーアプライヤ100は、それからねじファスナー10を発射し得る。ファスナーアプライヤ100からファスナー(単数または複数)10を駆動そして/または発射するために、トリガー116が、戻りばね115の付勢に対してハンドル114の方に引かれる。トリガー116が移動するとき、トリガー116のギア部分121上の歯117が、トリガーギア123の歯119を係合および時計方向に回転し、最終的に、円筒形ドライバー144、ファスナー保持具142およびパイロット140が、図11に示されるように、パイロット140がファスナーアプライヤ100の外側チューブ136の遠位先端部136aを超えて延びるまで(矢印「B」の軸方向に)駆動され、かつ(長軸方向の「X1」軸の周りに)回転されるようにする。1つの実施形態では、パイロット140は、外側チューブ136の遠位先端部136aを超えてほぼ3mmに等しい量だけ延びる。供給ばね145は、プランジャー147に作用し、プランジャー147を最近位ファスナーに対して付勢し、そしてファスナー保持具142内に配置されたねじファスナー10のカラム上で遠位方向に力を維持する。
【0033】
図12に示され、かつ以下により詳細に論議されるように、一旦、パイロット140が遠位方向に移動することを停止すると、円筒形ドライバー144およびファスナー保持具142は、最遠位の吸収性ねじファスナー10aのヘッド部分14が外側チューブ136の遠位先端部136aと実質的に列をなすまで遠位方向に駆動かつ回転され続け、従って、外側チューブ136の遠位先端部136aを超えての最遠位ねじファスナー10aの挿入を防ぐ。図12に示されるように、円筒形ドライバー144は、最遠位ねじファスナー10aを、パイロット140の保持特徴148の上およびそれを超えて完全に駆動かつ回転する。さらに、保持特徴148は、隣接する最遠位ねじファスナー10bが円筒形ドライバー144と係合し、そしてそれによって進行されるまで、隣接する吸収性ねじファスナー10b、隣接する最遠位ねじファスナー10aの遠位進行に対するストップとして作用する。
【0034】
保持特徴148は、挿管管腔18中のCリング、圧縮可能なOリング、クリンプまたはバンプ(図15Aを参照のこと)であり得、ここで、保持特徴148は、ねじファスナー10の挿管管腔18の寸法より大きい初期寸法を有している。従って、最遠位ねじファスナー10aが保持特徴148を初期に係合または接触するとき、保持特徴148は挿管管腔18より大きいサイズであるので、最遠位ねじファスナー10aは、通過することを妨げられる。しかし、最遠位ねじファスナー10aに付与されている力が増加されるとき、保持特徴148は、最遠位ファスナー10aが進行されるとき、挿管管腔18中に押し込められる。最遠位ファスナー10aは、この保持特徴が挿管管腔18を通過し、そしてその近位端から出るように、保持特徴148を横切って完全に押される。最遠位ファスナー10aの背後にある、ねじファスナーのカラムは、次いで、供給ねじ145の力により遠位方向に進行される。しかし、供給ばね145の力は、保持特徴148を次のねじファスナー中に押し込めるに十分大きくはない。従って、保持特徴148は、ねじファスナーのカラムの遠位進行を防ぐ。
【0035】
一旦、トリガー116が完全に押し下げられ、そして最遠位ねじファスナー10aがメッシュを通じて組織中に駆動されると、使用者は、トリガー116を解放し、そして2ステージの放出サイクルが開始する。図13を参照して、ファスナー保持具142がその場に固定されたままである間、円筒形ドライバー144は近位方向(例えば、矢印「C」の方向)に退却される。円筒形ドライバー144は回転されず、そして近位方向に引かれ、その結果、最遠位ファスナー10aは外されない。円筒形ドライバー144が退却されるとき、弾性フィンガー144aは、弾性フィンガー144aがスロット28aのテーパー
上表面の上をスライドするとき半径方向の外側に偏向またはカム運動し、最遠位ねじファスナー10aのヘッド部分14aのスロット28aと脱係合し、そして最遠位ねじファスナー10aを解放する。さらに、円筒形ドライバー144が退却されるとき、弾性フィンガー144aは、ファスナー保持具142とのそれらの相互係合によって半径方向外側にカム運動される。円筒形ドライバー144は、弾性フィンガー144aの最遠位先端部がファスナー保持具142の最遠位エッジと実質的に整列されるまで、退却され得る。
【0036】
ここで図14を参照して、パイロット140は、パイロット140が外側チューブ136内に、パイロット140の遠位先端部140aがより長く曝されないように配置されるまで、近位方向に退却される。さらに、円筒形ドライバー144およびファスナー保持具142は、円筒形ドライバー144の弾性フィンガー144aの先端部143aが隣接するねじファスナー10bのヘッド部分14b中に形成されたスロット28bと整列されるまで、近位方向に退却される。代替の実施形態では、円筒形ドライバー144およびパイロット140は、互いとは独立に、または同時に退却され得る。
【0037】
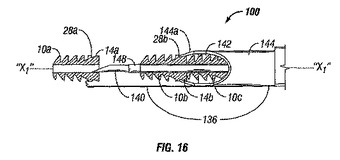
ここで、図15を参照して、ねじファスナー10bが保持特徴148によってその場に維持される間、ファスナー保持具142は、図8に示されるように、その開始位置まで近位方向に引かれ、その結果、円筒形ドライバー144の弾性フィンガー144aの先端部143aは、それらの非偏向位置に戻り、そして隣接ねじファスナー10bのヘッド部分14bのスロット28bを係合する。ファスナー保持具142は、円筒形ドライバー144と比較したとき、その開始位置に戻るためのより長いストロークを有するので、円筒形ドライバー144の弾性フィンガー144aは戻って下に曲がり、そして隣接するねじファスナー10bを係合する。図16を参照して、外側チューブ136は、図9および17に示されるように、その開始位置に戻る。代替の実施形態では、外側チューブ136のその開始位置への遠位移動は、末端使用者によって聞かれる/感じられる可聴および/または触覚応答を伴い得る。代替の実施形態では、円筒形ドライバー144およびファスナー保持具142は、近位方向に一緒に退却し得る。
【0038】
1つの実施形態では、ハウジング112は、再利用可能なハンドル部分114および再滅菌され得るトリガー116、および使い捨て可能な細長い管状部分118を有するように製作され得る。従って、すべてのねじファスナー10の放出に際し、細長い管状部分118は棄てられかつ置換され得、ハウジング部分112は、手順の制限された数まで殺菌および再使用され得る。
【0039】
その他の実施形態では、円筒形ドライバー144を回転させる回転手段は、手によって回転され得る回転子に接続される単一のノブを含み得る。さらに、この回転手段は、ラックおよびギア構造、または1セットの傘ギアを含み得る。
【0040】
図18、18Aおよび18Bは、吸収性ねじファスナーの別の可能な実施形態を提示する。ねじファスナー200はねじファスナー10と類似であり、そして構成および/または作動における差異を識別するために必要な程度までのみ詳細に論議される。1つの実施形態では、ねじファスナー200の本体部分212は、内側距離「D2」に等しい長さの少なくとも一部分、望ましくはその全長に沿って均一な距離を有している。また、本体部分212の距離「D1」は、狭い平滑遠位端220から、より大きな近位端までテーパー状であり得、そこでは、それは、トルク強度を増加するために近位ヘッド部分214の外径まで遷移する。本体部分212に沿う漸進的なテーパーは、上記メッシュに侵入するときねじファスナー200の小さな足跡を可能にし、そして身体中へのより良好な吸収速度のために本体部分212の長さに沿って半径方向の外側に成長すること、そしてヘッド部分214の外径への次の遷移はトルクに抵抗することを支援する。さらに、ヘッド部分214中に形成されたスロット228は、長軸方向軸「X」に平行であり、そしてヘッド部分214の全厚みに延びる。
【0041】
図19〜21を参照して、ねじファスナー10または200の付与のため、またはねじファスナー10または200を保持するために用いられる、ファスナーアプライヤ100の細長い管状部分118の遠位端との係合のための端部エフェクターは、一般に、202として指定される。端部エフェクター202は、その中にファスナー10または200の装填を保持し、そして処理され、もしくは置換され得るか、または殺菌、再装填および再使用され得る、使い捨て可能な装填ユニット(DLU)または単回使用装填ユニット(SULU)の形態をとり得る。
【0042】
最初に図19〜21を参照して、端部エフェクター202は、長軸方向軸「X2」を規定し、そしてその中にねじファスナー200を保持するための内側チューブアセンブリ238を収容する外側チューブ236、管状部分118の遠位端上に支持されるカム螺旋ドライバー244、ピン254、および内側チューブアセンブリ238内に配置され、かつカム螺旋ドライブ244に作動可能に接続されるカム螺旋サブアセンブリ248を含む。
【0043】
端部エフェクター202は、ファスナーアプライヤ100の細長い管状部分118の遠位端に付着されるか、またはそれと一体に形成され、その結果、ファスナーアプライヤ100の制御トリガー116がハンドル114に向かって引かれるとき、カム螺旋ドライバー244は(上記に記載された円筒形ドライバー144の回転と同様に)回転する。カム螺旋サブアセンブリ248は、カム螺旋ドライバー244のピン246と嵌合し、かつそれを受容するらせん状ねじ山248aを含み、その結果、カム螺旋ドライバー244が回転するとき、カム螺旋サブアセンブリ248は、本明細書で以下により詳細に論議されるように、回転し、かつ平行移動する。
【0044】
図22および23を参照して、カム螺旋サブアセンブリ248が詳細に論議される。カム螺旋サブアセンブリ248は、らせん状ねじ山248aを規定する近位端250aを有するカム螺旋250、カム螺旋250の遠位端250bから長軸方向に延びるパイロット240、およびカム螺旋250の遠位端250b上に作動可能に支持されるファスナー保持具242を含む。カム螺旋サブアセンブリ248は、カム螺旋250の回転に際し、パイロット240およびファスナー保持具242が同様に回転されるような様式でアセンブルされる。代替の実施形態では、カム螺旋サブアセンブリ248は、単一パーツ/コンポーネントとして製作され得る。ファスナー保持具242は、ねじファスナー200の保持具またはガイドとして作用する、一対の対向する長軸方向に延びるレール242aを含み得る。レール242aの遠位端243aはまた、本明細書中以下に説明されるように、ねじファスナー200のためのドライバーとして作用する。望ましくは、パイロット240の遠位端240aは、レール242aの遠位端243aおよびファスナー保持具242の遠位方向に延びる。ピン254(例えば、図21を参照のこと)は、カム螺旋250中に形成されたスロット250c中に受容され、そしてそれから半径方向に延びる。
【0045】
図24〜27に見られるように、カム螺旋サブアセンブリ248は、供給ばね245およびねじファスナープッシャー247をさらに含み、各々は、パイロット240上に、かつファスナー保持具242内に配置される。図25〜27に示されるように、ファスナー保持具242のレール242aは、ねじファスナー200を、ねじファスナー200のヘッド部分214中の個々のスロット228と係合することにより配向する。望ましくは、供給ばね245は、ねじファスナープッシャー247とカム螺旋250との間に配置される。従って、供給ばね245は、プッシャー247を遠位方向に付勢する。
【0046】
複数のねじファスナー200は、カム螺旋サブアセンブリ248中に保持され得るか、またはそれと作動可能に連結され得、例えば、図25中に見られるように一つ(1)、図26中に見られるように二つ(2)、または図27中に見られるように三つ(3)である。1〜3のねじファスナー200が図25〜27に示されているが、本発明のデバイスが任意の数のねじファスナー200と用いられ得るか、またはそれらを収容し得ることが理解される。
【0047】
ここで、図28を参照して、代替の実施形態では、またはさらに、内側チューブサブアセンブリ238は、円筒形本体260、その遠位端260aに作動可能に連結されたトルクリング262、およびトルクリング262に作動可能に連結された保持リング264を含む。円筒形本体260は、カム螺旋250から延びるピン254をスライド可能に受容するためにその中に形成された横方向配向された回転スロット260bを含む。回転スロット260bは、ピン254の動きを、そして次にカム螺旋ドライバー244の回転を制限する。回転スロット260bは、上記回転を約90゜に制限するようなサイズであり得る。図28への参照を続けて、トルクリング262は、それから半径方向の内側に延びる一対の正反対に対向する係合特徴262aを含む。係合特徴262aは、望ましくは、ねじファスナー200のヘッド部分214の対応するスロット228と嵌合するサイズである。保持リング264は、それから半径方向の内側に延びる2対の正反対に対向するタブ264a、264bを含む。タブ264a、264bは、互いに対して約90゜オフセットされ得る。望ましくは、一対のタブ264aが、トルクリング262の係合特徴262aと軸方向に整列される。タブ264a、264bは、遠位ねじファスナー200をその場に保持し、そしてカム螺旋サブアセンブリ248供給ばね245が、1つの迅速な発射シークエンスにある器具から、すべての内部ねじファスナー200を外に駆動することを防ぐ。
【0048】
内側チューブサブアセンブリ238は、互いにマウントされるか、またはそうでなければ作動可能に連結されて単一の内側チューブサブアセンブリ238を形成するいくつかの異なるコンポーネントから構築され得るか、または単一のコンポーネントとして製造され得る。
【0049】
ここで、図29および30を参照して、内側チューブサブアセンブリ238が、カム螺旋サブアセンブリ248と作動可能に連結されて(例えば、その上に回転可能に支持される)示される。上記のように、ピン254は、内側チューブサブアセンブリ238の回転スロット260bを通って延びる。従って、内側チューブサブアセンブリ238およひカム螺旋サブアセンブリ248は、以下により詳細に説明されるように、カム螺旋サブアセンブリ248が能動化されるとき、1つのユニットとして作用する。
【0050】
図29では、内側チューブサブアセンブリ238は、カム螺旋サブアセンブリ248に対する第1の位置に示され、そしてピン254は、回転スロット260の1つの端部に位置する。図30では、内側チューブサブアセンブリは、カム螺旋サブアセンブリ248に対する第2の位置で示され、そしてピン254は、回転スロット260の反対側の端部に位置する。
【0051】
ここで、図31〜36を参照し、吸収性ねじファスナー200または10を挿入する方法が論議される。図32および33を参照して、外側チューブ236の(狭間のある)遠位先端部236aは、最初、メッシュおよび/または標的組織に対して配置される。そのようにすることで、外側チューブ236の遠位先端部236aは、このメッシュに強固に接続された外側チューブ236を維持し、およびこのメッシュを密接に保つことを補助する。
【0052】
次いで、上記ファスナーアプライヤのトリガーが能動化され(例えば、握られる)カム螺旋ドライバー244を回転し、そしてカム螺旋サブアセンブリ248および内側チューブサブアセンブリ238を回転かつ移す。外側チューブ236を静止位置に保持し、最遠位ねじファスナー200aは、図34および35に示されるように、遠位方向に進行される。特に、カム螺旋サブアセンブリ248は回転かつ並進して最遠位ねじファスナー200aを前方に駆動し、内側チューブサブアセンブリ238は、最遠位ねじファスナー200aを回転する。
【0053】
図36に見られるように、カム螺旋サブアセンブリ248(図34を参照のこと)は、遠位ねじファスナー200aを、保持リング264のタブ264b(図28を参照のこと)を超えて遠位ねじファスナー200aを押すに十分な量駆動し、そしてそれ故、上記ファスナーアプライヤの残りから最遠位ねじファスナー200aを解放する。
【0054】
望ましくは、このファスナーアプライヤのトリガーが解放されるとき、すべての内部サブアセンブリは退却かつそれら自身を再配向し、それ故、供給ばね245が次のねじファスナーをトルクリング254中に進行させることを可能にする。
【0055】
ここで、図37および38を参照して、吸収性ねじファスナーの別の可能な実施形態が、一般に300として示される。ねじファスナー300は、ねじファスナー10に類似であり、そして構築および/または作動における差異を識別するために必要な程度までのみが論議される。
【0056】
ねじファスナー300は、長軸方向軸「X」を規定する本体部分312、および本体部分312の近位端上に配置された実質的に円形のヘッド部分314を含む。本体部分312は、その長さに沿って延び、そして遠位端320で終了するらせん状ねじ山316を含む。現在の実施形態では、らせん状ねじ山316は、挿入目的の容易さのために遠位端で接触までテーパー状である。らせん状ねじ山316の近位端は、ヘッド部分314の遠位表面前で停止し、メッシュ(図示せず)が受容され得るギャップ316cを生成する。
【0057】
本体部分312の遠位端320は、角度Θだけ上記「X」軸に対して角度をなす遠位表面320aを規定する。1つの実施形態では、遠位表面320aの角度Θは、上記「X」軸に直交する軸「Y」に対して約5゜〜約15゜である。なお別の実施形態では、角度Θは約9゜である。さらに、本体部分312は、その長さに沿って延びる中央シャフト313を含む。1つの実施形態では、中央シャフト313はテーパー状であり、ねじファスナー300の挿入の容易さを増加するためにより小さな遠位端およびより大きな近位端を有する。
【0058】
図37および38を続いて参照し、ヘッド部分314は、ヘッド部分314の外側半径方向表面中に形成された、スロット328の形態にある、ドライバー受容凹部または構造を含む。スロット328は、ねじファスナー300にトルクを伝達するような形態である。1つの実施形態では、一対の正反対に対向するスロット328が、ヘッド部分314中に形成される。各スロット328は、長軸方向の「X」軸に平行であり得、そしてヘッド部分314の遠位表面314aおよび近位表面314bを通じて延びる。スロット328は、ねじファスナー300の全長を延び、らせん状ねじ山316中に形成された対応するスロット328a−328dを規定する。
【0059】
1つの実施形態では、ヘッド部分314は低プロフィールを有し、すなわち、ヘッド部分314は、約1.5mmである長さ「L2」、および約3.81mmの距離を有する。また、本体部分312は約5.0mmである長さ「L1」を有し得る。従って、ねじ300の全体の長さ「L」は約6.5mmである。
【0060】
あるいは、またはさらに、トルク伝達特徴が、ショルダー326の形態で、スロット328上に提供され得ることが想定され、このトルク伝達特徴は、ねじファスナー300が回転されることを可能にする。
【0061】
遠位表面314aはまた、示されるように、上記「X」軸に対して角度Φだけ角度をなし得る。1つの実施形態では、遠位表面314aの角度Φは、上記「X」軸に直交する軸「Y」に対して約5゜〜約15゜である。なお別の実施形態では角度Φは約9゜である。遠位表面314aの角度は、ねじファスナー300が手術部位から除去される必要があるとき、ねじファスナー300の除去を補助するために提供される。
【0062】
スペースまたはギャップ316cは、近位ねじ山突出とヘッド部分314の遠位表面314aとの間に提供され得る。ギャップ316cは、外科用メッシュがその中に静止するとを可能にする。ねじ山316のピッチは、特定の手術手順に依存してより大きくまたはより小さくあり得ることが想定される。
【0063】
図37に見られるように、各スロット328a〜328dは、半径のある遠位または先導エッジ329aおよび半径のある近位または追従エッジ329bを含む。半径のある先導エッジ329aおよび半径のある追従エッジ329bは、手術部位中への、および手術部位からのねじファスナー300の挿入および除去を容易にすることを-補助する。
【0064】
先行する記載から、本発明のねじファスナーおよびファスナーアプライヤは、協働して、ファスナーを高い保持表面積とともに、1つの方向からより単純な設計を有するファスナーアプライヤの利用により組織に固く付着する。本発明は、組織を連結すること、ヘルニアメッシュ修復、膀胱頸部懸垂法、関節鏡膝手術、および患者中に外科用デバイスまたは移植可能なデバイスを位置決めすることを含むインプラント薬物送達システムとの組み合わせを含む多くの適用で利用され得る。
【0065】
本発明のいくつかの形態を示し、かつ説明してきたが、種々の改変が本発明の思想および範囲から逸脱することなくなされ得ることもまた明らかである。
【0066】
従って、本発明の形態、詳細および適用における種々の変化が、本発明の思想および範囲から逸脱することなくなされ得ることが理解されるべきである。
【図面の簡単な説明】
【0067】
【図1】図1は、本開示の実施形態による吸収性ねじファスナーの斜視図である。
【図2】図2は、図1の吸収性ねじファスナーの別の斜視図である。
【図3】図3は、図1の直線3−3に沿ってとった図1の吸収性ねじファスナーの長軸方向断面図である。
【図4】図4は、図3の吸収性ねじファスナーの正平面である。
【図5】図5は、本開示の実施形態によるねじファスナーアプライヤの実施形態の斜視図である。
【図6】図6は、初期位置にある間の図5のねじファスナーアプライヤのハウジング部分のハウジングの半分を取り除いた側面図である。
【図7】図7は、図5のねじファスナーアプライヤの遠位端の斜視図である。
【図8】図8は、図5および6のねじファスナーアプライヤの遠位端の斜視部分断面図である。
【図9】図9は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの一連の操作ステップを示す。
【図10】図10は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの一連の操作ステップを示す。
【図11】図11は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの一連の操作ステップを示す。
【図12】図12は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図13】図13は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図14】図14は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図15】図15は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図16】図16は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図17】図16は、図5〜8のねじファスナーアプライヤの遠位端の部分断面側立面図であり、図1〜4の吸収性ねじファスナーを標的手術部位中に駆動するためのねじファスナナーアプライヤの操作ステップを示す。
【図18】図18は、本開示の吸収性ねじファスナーの別の実施形態の斜視図である。
【図18A】図18Aは、図18の線18A−18Aに沿ってとった図18の吸収性ねじファスナーの長軸方向断面図である。
【図18B】図18Bは、図18および18Aの吸収性ねじファスナーの平面図である。
【図19】図19は、本開示の別の実施形態によりねじファスナーアプライヤの遠位端の、それに作動可能に固定された端部エフェクターとともに示す斜視図である。
【図20】図20は、図19のねじファスナーアプライヤの遠位端の、それから分離または脱連結された端部エフェクターとともに示す斜視図である。
【図21】図21は、本開示によるアセンブルされた、カム螺旋サブアセンブリ、内側チューブサブアセンブリおよび端部エフェクターの外側チューブの斜視図である。
【図22】図22は、図21の端部エフェクターのカム螺旋状サブアセンブリの、それから外側チューブおよび内側チューブサブアセンブリを取り除いて示す斜視図である。
【図23】図23は、図22のカム螺旋サブアセンブリのさらなる斜視図である。
【図24】図24は、図22および23のカム螺旋サブアセンブリの、それと作動可能に連結されて示されるプッシャーおよびフィードばねとともに示す斜視図である。
【図25】図25は、図24のカム螺旋サブアセンブリの斜視図であり、それと作動可能に連結されたねじファスナーを示す。
【図26】図26は、図24および25のカム螺旋サブアセンブリの、それと作動可能に連結された一対のねじファスナーとともに示す斜視図である。
【図27】図27は、図24〜26のカム螺旋サブアセンブリの、それと作動可能に連結された少なくとも3つのねじファスナーとともに示す斜視図である。
【図28】図28は、図21および28の端部エフェクターの内側チューブサブアセンブリの斜視図である。
【図29】図29は、図28の内側チューブサブアセンブリ内に作動可能に配置された、第1の位置にある間の図27のカム螺旋サブアセンブリの斜視図である。
【図30】図30は、第2の位置にある間の、図29のカム螺旋サブアセンブリおよび内側チューブサブアセンブリの斜視図である。
【図31】図31は、図27のカム螺旋サブアセンブリの、図30の第2の位置にある間の斜視図である。
【図32】図32は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図33】図33は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図34】図34は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図35】図35は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図36】図36は、図18、18Aおよび18Bの吸収性ねじファスナーを標的手術部位に駆動するための、図19〜31の端部エフェクターを含む外科用ファスナーアプライヤの操作ステップを示す。
【図37】図37は、本開示のさらなる実施形態による吸収性ねじファスナーの断面側面斜視図である。
【図38】図38は、図37の線38−38に沿ってとった図37の吸収性ねじファスナーの長軸方向断面図である。
【特許請求の範囲】
【請求項1】
吸収性ねじファスナーであって:
長軸方向軸を規定し、かつ近位端および遠位端を有する本体部分であって、その上に形成されたらせん状ねじ山を有し、該らせん状ねじ山が第1の距離を有する、本体部分;および
該本体部分の近位端に配置されたヘッド部分であって、該本体部分に直線運動および回転運動の両方を伝達するために、その中に形成されたドライバー受容構造を有し、該らせん状ねじ山の第1の距離に実質的に等しい外径を有する、ヘッド部分、を備える、吸収性ねじファスナー。
【請求項2】
中心シャフトが、狭い遠位端からより大きな近位部分までテーパー状である、請求項1に記載の吸収性ねじファスナー。
【請求項3】
前記ドライバー受容構造が、前記ヘッド部分の外側半径方向表面に形成された実質的に平坦な表面をさらに規定する、請求項1に記載の吸収性ねじファスナー。
【請求項4】
前記実質的に平坦な表面が、前記ねじ山の外側半径方向表面の少なくとも一部分まで延びる、請求項3に記載の吸収性ねじファスナー。
【請求項5】
前記吸収性ねじファナスーが、L1、L4、PGA、PGB、およびPLAからなる群から選択される少なくとも1つの材料から形成される、請求項1に記載の吸収性ねじファスナー。
【請求項6】
前記本体部分の遠位端が、平滑である、請求項1に記載の吸収性ねじファスナー。
【請求項7】
前記ねじ山のランドが、前記長軸方向軸に対して実質的に垂直である、請求項1に記載の吸収性ねじファスナー。
【請求項8】
前記ねじ山の距離が、実質的に拡大される、請求項1に記載の吸収性ねじファスナー。
【請求項9】
前記ヘッド部分の距離が、約3.8mmである、請求項1に記載の吸収性ねじファスナー。
【請求項10】
前記ヘッド部分の高さが、約1.5mmである、請求項1に記載の吸収性ねじファスナー。
【請求項11】
前記本体部分の長さが、約5mm長さである、請求項1に記載の吸収性ねじファスナー。
【請求項12】
その全長を通じて延びる管腔をさらに含む、請求項1に記載の吸収性ねじファスナー。
【請求項13】
前記本体部分が、円形断面を有する、請求項12に記載の吸収性ねじファスナー。
【請求項14】
請求項1に記載の吸収性ねじファスナーを挿入する方法であって、
パイロットで標的組織を開く工程、および
前記ヘッド部分上に直線方向力および回転力を付与することにより該吸収性ねじファスナーを設置する工程、を包含する、方法。
【請求項15】
吸収性ねじファスナーを挿入するための器具であって:
細長い外側チューブを有する遠位部分;
トリガー機構を有する近位部分;および
該外側チューブ内に配置され、かつ該外側チューブに対して移動可能であるドライバー/トルクサブアセンブリ、を備える、器具。
【請求項16】
前記外側チューブが、隙間のついた先端部を形成する、請求項15に記載の器具。
【請求項17】
前記トリガー機構が、ラチェット機構を備える、請求項15に記載の器具。
【請求項18】
前記ドライバー/トルクサブアセンブリが、該サブアセンブリの遠位端で2つの可撓性タブを規定する、請求項15に記載の器具。
【請求項19】
前記外側チューブが、遠位方向に進行された位置に付勢される、請求項15に記載の器具。
【請求項20】
前記外側チューブ内に配置されたパイロットをさらに備え、該パイロットがその遠位端上にテーパー状の表面を有する、請求項15に記載の器具。
【請求項21】
ファスナーを受容するような寸法のファスナー保持具をさらに備える、請求項15に記載の器具。
【請求項22】
吸収性ねじファスナーおよび該吸収性ねじファスナーを挿入するための器具であって:
遠位端上の外側チューブおよびその近位端上のトリガー機構を有する器具;および
本体部分および該本体部分の近位端に配置されたヘッド部分を有する吸収性ねじファスナーであって、該ファスナーが、該器具の遠位端に挿入され、該吸収性ねじファスナーのヘッドが、該本体部分に直線運動および回転運動の両方を伝達するために、その中に形成されたドライバー受容形態を有する、吸収性ねじファスナーを備える、吸収性ねじファスナーおよび器具。
【請求項23】
吸収性ねじファスナーであって:
長軸方向軸を規定し、かつ近位端および遠位端を有する本体部分であって、その上に形成されたらせん状ねじ山を有し、該らせん状のねじ山が第1の距離を有する、本体部分;および
該本体部分の近位端に配置されたヘッド部分であって、該本体部分に回転運動を伝達するために、その中に形成されたドライバー受容構造を有し、該らせん状ねじ山の第1の距離に実質的に等しい外径を有する、ヘッド部分、を備える、吸収性ねじファスナー。
【請求項24】
前記ドライバー受容構造が、前記ヘッド部分の外側半径方向表面中に形成されたスロットをさらに規定する、請求項23に記載の吸収性ねじファスナー。
【請求項25】
前記スロットが、前記ねじファスナーの全長に延びる、請求項24に記載の吸収性ねじファスナー。
【請求項26】
前記吸収性ねじファスナーが、L1、L4、PGA、およびPGBからなる群から選択される材料から形成される、請求項25に記載の吸収性ねじファスナー。
【請求項27】
前記本体部分の遠位端が、前記長軸方向軸に対して角度をなす遠位表面を規定する、請求項23に記載の吸収性ねじファスナー。
【請求項28】
前記本体部分の遠位端の遠位表面が、前記長軸方向軸に垂直である軸に対して約5゜〜約15゜の角度をなす、請求項27に記載の吸収性ねじファスナー。
【請求項29】
前記ヘッド部分が、前記長軸方向軸に対して角度をなす遠位表面を規定する、請求項23に記載の吸収性ねじファスナー。
【請求項30】
前記ヘッド部分の遠位表面が、前記長軸方向軸に垂直である軸に対して約5゜〜約15゜の角度をなす、請求項29に記載の吸収性ねじファスナー。
【請求項31】
前記本体部分の遠位端の遠位表面が、前記長軸方向軸に垂直である軸に対して約5゜〜約15゜の角度をなす、請求項30に記載の吸収性ねじファスナー。
【請求項32】
各ねじ山に形成された各スロットが、半径方向先導エッジおよび半径方向後続エッジの少なくとも1つを含む、請求項31に記載の吸収性ねじファスナー。
【請求項1】
吸収性ねじファスナーであって:
長軸方向軸を規定し、かつ近位端および遠位端を有する本体部分であって、その上に形成されたらせん状ねじ山を有し、該らせん状ねじ山が第1の距離を有する、本体部分;および
該本体部分の近位端に配置されたヘッド部分であって、該本体部分に直線運動および回転運動の両方を伝達するために、その中に形成されたドライバー受容構造を有し、該らせん状ねじ山の第1の距離に実質的に等しい外径を有する、ヘッド部分、を備える、吸収性ねじファスナー。
【請求項2】
中心シャフトが、狭い遠位端からより大きな近位部分までテーパー状である、請求項1に記載の吸収性ねじファスナー。
【請求項3】
前記ドライバー受容構造が、前記ヘッド部分の外側半径方向表面に形成された実質的に平坦な表面をさらに規定する、請求項1に記載の吸収性ねじファスナー。
【請求項4】
前記実質的に平坦な表面が、前記ねじ山の外側半径方向表面の少なくとも一部分まで延びる、請求項3に記載の吸収性ねじファスナー。
【請求項5】
前記吸収性ねじファナスーが、L1、L4、PGA、PGB、およびPLAからなる群から選択される少なくとも1つの材料から形成される、請求項1に記載の吸収性ねじファスナー。
【請求項6】
前記本体部分の遠位端が、平滑である、請求項1に記載の吸収性ねじファスナー。
【請求項7】
前記ねじ山のランドが、前記長軸方向軸に対して実質的に垂直である、請求項1に記載の吸収性ねじファスナー。
【請求項8】
前記ねじ山の距離が、実質的に拡大される、請求項1に記載の吸収性ねじファスナー。
【請求項9】
前記ヘッド部分の距離が、約3.8mmである、請求項1に記載の吸収性ねじファスナー。
【請求項10】
前記ヘッド部分の高さが、約1.5mmである、請求項1に記載の吸収性ねじファスナー。
【請求項11】
前記本体部分の長さが、約5mm長さである、請求項1に記載の吸収性ねじファスナー。
【請求項12】
その全長を通じて延びる管腔をさらに含む、請求項1に記載の吸収性ねじファスナー。
【請求項13】
前記本体部分が、円形断面を有する、請求項12に記載の吸収性ねじファスナー。
【請求項14】
請求項1に記載の吸収性ねじファスナーを挿入する方法であって、
パイロットで標的組織を開く工程、および
前記ヘッド部分上に直線方向力および回転力を付与することにより該吸収性ねじファスナーを設置する工程、を包含する、方法。
【請求項15】
吸収性ねじファスナーを挿入するための器具であって:
細長い外側チューブを有する遠位部分;
トリガー機構を有する近位部分;および
該外側チューブ内に配置され、かつ該外側チューブに対して移動可能であるドライバー/トルクサブアセンブリ、を備える、器具。
【請求項16】
前記外側チューブが、隙間のついた先端部を形成する、請求項15に記載の器具。
【請求項17】
前記トリガー機構が、ラチェット機構を備える、請求項15に記載の器具。
【請求項18】
前記ドライバー/トルクサブアセンブリが、該サブアセンブリの遠位端で2つの可撓性タブを規定する、請求項15に記載の器具。
【請求項19】
前記外側チューブが、遠位方向に進行された位置に付勢される、請求項15に記載の器具。
【請求項20】
前記外側チューブ内に配置されたパイロットをさらに備え、該パイロットがその遠位端上にテーパー状の表面を有する、請求項15に記載の器具。
【請求項21】
ファスナーを受容するような寸法のファスナー保持具をさらに備える、請求項15に記載の器具。
【請求項22】
吸収性ねじファスナーおよび該吸収性ねじファスナーを挿入するための器具であって:
遠位端上の外側チューブおよびその近位端上のトリガー機構を有する器具;および
本体部分および該本体部分の近位端に配置されたヘッド部分を有する吸収性ねじファスナーであって、該ファスナーが、該器具の遠位端に挿入され、該吸収性ねじファスナーのヘッドが、該本体部分に直線運動および回転運動の両方を伝達するために、その中に形成されたドライバー受容形態を有する、吸収性ねじファスナーを備える、吸収性ねじファスナーおよび器具。
【請求項23】
吸収性ねじファスナーであって:
長軸方向軸を規定し、かつ近位端および遠位端を有する本体部分であって、その上に形成されたらせん状ねじ山を有し、該らせん状のねじ山が第1の距離を有する、本体部分;および
該本体部分の近位端に配置されたヘッド部分であって、該本体部分に回転運動を伝達するために、その中に形成されたドライバー受容構造を有し、該らせん状ねじ山の第1の距離に実質的に等しい外径を有する、ヘッド部分、を備える、吸収性ねじファスナー。
【請求項24】
前記ドライバー受容構造が、前記ヘッド部分の外側半径方向表面中に形成されたスロットをさらに規定する、請求項23に記載の吸収性ねじファスナー。
【請求項25】
前記スロットが、前記ねじファスナーの全長に延びる、請求項24に記載の吸収性ねじファスナー。
【請求項26】
前記吸収性ねじファスナーが、L1、L4、PGA、およびPGBからなる群から選択される材料から形成される、請求項25に記載の吸収性ねじファスナー。
【請求項27】
前記本体部分の遠位端が、前記長軸方向軸に対して角度をなす遠位表面を規定する、請求項23に記載の吸収性ねじファスナー。
【請求項28】
前記本体部分の遠位端の遠位表面が、前記長軸方向軸に垂直である軸に対して約5゜〜約15゜の角度をなす、請求項27に記載の吸収性ねじファスナー。
【請求項29】
前記ヘッド部分が、前記長軸方向軸に対して角度をなす遠位表面を規定する、請求項23に記載の吸収性ねじファスナー。
【請求項30】
前記ヘッド部分の遠位表面が、前記長軸方向軸に垂直である軸に対して約5゜〜約15゜の角度をなす、請求項29に記載の吸収性ねじファスナー。
【請求項31】
前記本体部分の遠位端の遠位表面が、前記長軸方向軸に垂直である軸に対して約5゜〜約15゜の角度をなす、請求項30に記載の吸収性ねじファスナー。
【請求項32】
各ねじ山に形成された各スロットが、半径方向先導エッジおよび半径方向後続エッジの少なくとも1つを含む、請求項31に記載の吸収性ねじファスナー。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】

【図11】
【図12】

【図13】

【図14】
【図15】
【図15A】

【図16】
【図17】

【図18】
【図18A】

【図18B】

【図19】
【図20】

【図21】

【図22】
【図23】

【図24】
【図25】

【図26】
【図27】
【図28】
【図29】
【図30】
【図31】

【図32】
【図33】

【図34】
【図35】

【図36】

【図37】

【図38】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図15A】
【図16】
【図17】
【図18】
【図18A】
【図18B】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【公表番号】特表2007−500583(P2007−500583A)
【公表日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2006−533751(P2006−533751)
【出願日】平成16年6月14日(2004.6.14)
【国際出願番号】PCT/US2004/018702
【国際公開番号】WO2004/112841
【国際公開日】平成16年12月29日(2004.12.29)
【出願人】(501289751)タイコ・ヘルスケア・グループ・リミテッド・パートナーシップ (320)
【Fターム(参考)】
【公表日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成16年6月14日(2004.6.14)
【国際出願番号】PCT/US2004/018702
【国際公開番号】WO2004/112841
【国際公開日】平成16年12月29日(2004.12.29)
【出願人】(501289751)タイコ・ヘルスケア・グループ・リミテッド・パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]